

Gulfstream G550 Operating Manual

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
FLIGHT CONTROLS
2A-27-10: General
1. General Description:
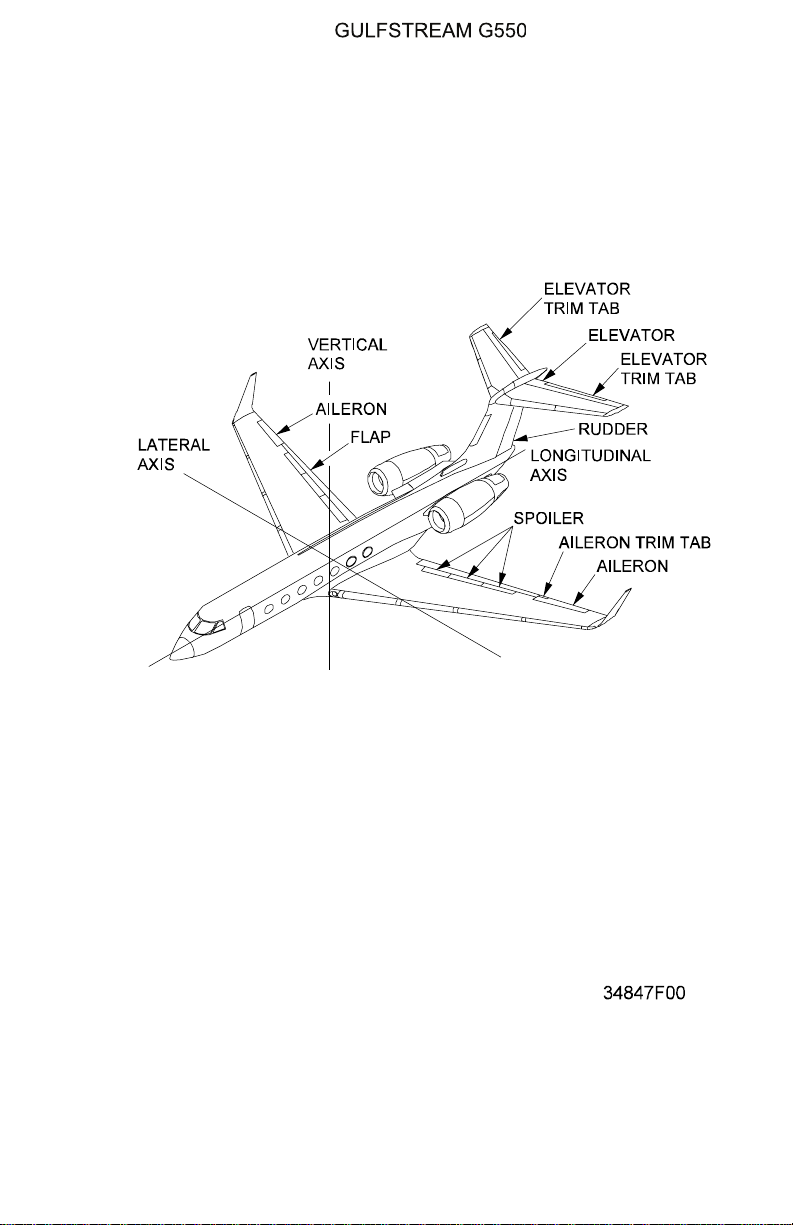
The aircraft flight controls allow the flight crew to guide the aircraft in the
longitudinal, vertical and horizontal axes (see Figure 2). The primary flight controls
are:
• Elevator to control aircraft pitch
• Rudder to control aircraft yaw
• Aileron to control aircraft roll
The primary flight controls are positioned by moving the pilot and copilot control
yokes and rudder pedals. Both yokes are mechanically linked together so that
either crew position has full control authority and control inputs are transparent to
both crew members since movement of one set of controls will move the
corresponding set of controls. Each yoke has a dedicated cable connection to the
elevator and aileron control on that respective side, but since the yokes are
mechanically linked, moving one side elevator or aileron will move the flight
controls on both sides. For instance, the copilot yoke is cable-linked to the right
elevator and the right aileron but any movement of the copilot yoke also moves
the pilot yoke that is in turn cable-linked to the left aileron and left elevator. This
system of split control authority and linked yoke movement provides a means to
maintain some flight control movement if one of the flight controls or associated
linkages becomes jammed. If a malfunction prevents movement of either the
elevators or ailerons, the mechanical links joining the two pilot yokes can be
severed, thereby allowing movement of the left or right elevator or aileron that
remains operational by commands using the yoke connected to the side of the
free control surface.
The two sets of rudder pedals are similarly mechanically linked together, but both
are connected to the rudder by a single cable. For this reason, there is no
provision for interrupting the linkage between the two sets of pedals, since each
set does not have an independent route to the rudder.
The cable connections from the yokes and rudder pedals are continuous loop
installations, providing feedback to the moveable controls. The control cables
engage bell cranks that translate cable movement into displacement commands
for hydraulic actuators that boost contol inputs to move the flight controls. Each
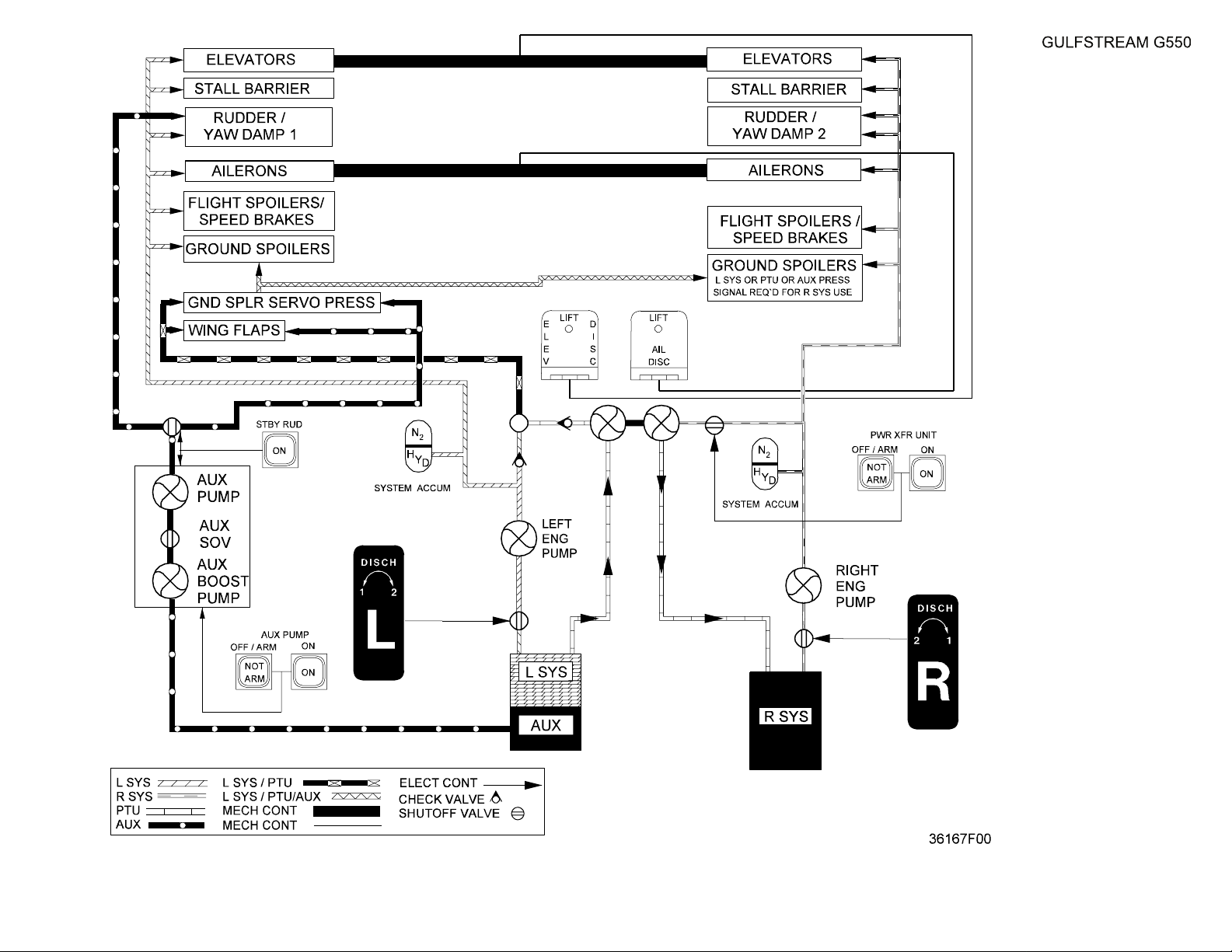
hydraulic actuator has a single shaft, but dual piston chambers in order that the
actuator may be driven by both (or either) left and right hydraulic system. (The
hydraulic system power sources for the flight controls are shown in Figure 1.) The
rudder actuator may also be powered by the Auxiliary (AUX) hydraulic system in
the event of dual hydraulic power failure. Each of the hydraulic actuators is
connected to the associated flight control by pushrods and bell cranks to impart
mechanical movement to the control surface. A bungee piston filled with hydraulic
fluid moderates the rate of actuation of the flight control and provides an artificial
feel input to the flight crew through the closed loop cable system. The failure of a
single hydraulic system does not degrade flight control operation - the remaining
system provides adequate power for flight control movement, and the actuator
chamber for the failed system bypasses fluid so there is no resistance to flow. If
both (or all, in the case of the rudder) hydraulic systems fail, both actuator
chambers bypass fluid, and pilot input through the cable connection moves the
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 1
August 14/03

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
internal shaft of the actuator and the associated pushrods and bellcranks without
powered assistance. More pilot force is required, but full movement of the flight
controls is attainable.
The autopilot is interfaced with the primary flight controls through electric servos
to move parallel cable linkages to the hydraulic actuators. Each flight control
surface has a Linear Variable Displacement Transducer (LVDT) that provides an
electrical signal proportional to flight control surface displacement from neutral.
The LVDT signal provides feedback to the autopilot for positioning the flight
controls, and also communicates control surface position for display on systems
and synoptic windows through interface with the Modular Avionics Units (MAUs).
The description of the Digital Automatic Flight Control Systems (autopilot) makes
up the entire content of Section 2B of this manual, and for that reason is not
covered in this Section. However, for the convenience of the reader, a tabulation
of the Crew Alerting System (CAS) messages associated with the autopilot is
included below.
The elevators and ailerons have trim tabs to position the flight controls with
aerodynamic forces to moderate the amount of physical effort to maintain the
control surfaces in the desired steady-state condition. The rudder is not equipped
with a trim tab, but instead has a mechanical trim input to reset the neutral
position of the rudder. The mechanical trim uses the hydraulic actuator to project
the rudder slightly into the windstream in the desired direction to compensate for
induced yaw.
The secondary flight controls and functions are:
• Wing flaps - enhance wing lift characteristics
• Flight and Ground Spoilers - reduce wing lift and add overall drag
• Movable horizontal stabilizer - aligns the elevator with aircraft angle of
attack
• Yawdamper - uses the autopilot rudder servo to moderate aircraft heading
oscillation
Some functions of the secondary flight controls are integrated with the operation
of the primary flight controls and other functions mutually complement the
operation of other secondary controls.
• As flaps extend, moving the wing center of lift aft, a downward pitch
moment is created - the moveable stabilizer automatically compensates for
the pitch moment by trimming downward. The opposite movement occurs
as flaps are retracted and the nose of the aircraft pitches up.
• When ailerons are used, flight spoilers on the downward wing activate to
increase roll rate and provide yaw into the turn. Ground spoilers decrease
ground roll distance during landings and aborted takeoffs.
• The yaw damper provides a degree of turn coordination for aileron roll
commands, provided wing flaps are not selected to more than thirty
degrees (30°).
Safety features incorporated into the flight controls system include:
• A stick shaker warning and a stick pusher stall prevention actuator.
• A gust lock that prevents damage to flight controls while the aircraft is
secured on the ground.
Page 2
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
2. Primary and Secondary Flight Controls Subsections:
The primary and secondary flight controls are discussed in the following
subsections:
• 2A-27-20: Elevator Pitch Control
• 2A-27-30: Rudder Yaw Control
• 2A-27-40: Aileron Roll Control
• 2A-27-50: Horizontal Stabilizer and Wing Flaps
• 2A-27-60: Stall Warning and Prevention System
• 2A-27-70: Speed Brake and Ground Spoilers
• 2A-27-80: Flight Controls Gust Lock
3. Autopilot Crew Alerting System (CAS) Messages:
The following CAS messages are associated with the operation of the autopilot
and integrated subsystems:
Area Monitored: CAS Message: Message Color:
Flight Guidance Computer
Internal Monitor
Flight Guidance Panel AP
Engage Switch
AP Engage Switches AP Engage Inhibit -Sw
AP 1-2 Fail Amber
AP Control Switch
Stuck
Active
Blue
Blue
Air Data System AP Inhibit - ADS Blue
Inertial Reference System AP Inhibit - IRS Blue
Control Column Force AP Inhibit - Left Column Blue
Control Column Force AP Inhibit - Right
Column
Blue
Control Wheel Force AP Inhibit - Left Wheel Blue
Control Wheel Force AP Inhibit - Right Wheel Blue
Manual Trim Wheel AP Inhibit - Man Trim
Autopilot Quick Disconnect
Switch
Active
AP Inhibit - QD Blue
Blue
Stall Shaker AP Inhibit - Stall Blue
Autopilot Touch Control
Steering Switch
Control Wheel Electric Trim
Switch
Weight On Wheels (WOW)
System
AP Inhibit - TCS Blue
AP Inhibit -Trim Cmd Blue
AP Inhibit - WOW Blue
Autopilot Power Source AP 1-2 Power Fail Blue
Autopilot Elevator Trim Servo AP / Trim Fail Blue
Flight Guidance Panel Speed
Window
Flight Guidance Computer /
WOW System
Take Off and Go Around
(TOGA) Engage Switch / Flight
Guidance Panel Manual Speed
Check Speed Target Blue
FGC - WOW Fault Blue
Go Around Pitch Blue
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 3
August 14/03

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
THIS PAGE IS INTENTIONALLY LEFT BLANK.
Page 4
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Flight Controls System:
Simplified Fluid Power
Diagram
Figure 1
2A-27-00
Page 5 / 6
August 14/03

Title Page
Prev Page
Next Page
TOC
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Flight Controls System Components
Figure 2
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 7
August 14/03

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
2A-27-20: Elevator Pitch Control
1. General Description:
The aircraft has a dual elevator installation to control aircraft pitch attitude. The
elevators are composed of a baked graphite-epoxy material. Each of the cockpit
yokes is connected to one of the aircraft elevators. The pilot yoke is connected to
the left elevator,the copilot yoke to the right elevator.Eachyokeisalsoconnected
to the other by a mechanical torque tube beneath the cockpit floor. Since both
yokes are interconnected, moving one yoke moves both elevators.
Braided steel cables run from each yoke to hydraulic assist actuators in the tail of
the aircraft. The cables are routed beneath the aircraft floor using pulley
connections to clear other installed equipment. The cables mate with the hydraulic
assist actuators via bellcranks that translate pulley rotational motion into forward
and aft motion. The actuators each have a single shaft powered by two piston
chambers, one chamber for each (left and right) hydraulic system. Both hydraulic
systems normally power the actuators, but one system is sufficient for full elevator
movement. The actuators are connected to the respective elevator by linkages
and bellcranks, moving the elevator up or down about the pivot points on the aft of
the horizontal stabilizer. The deflection range of the elevators is twenty-four
degrees (24°) up and thirteen degrees (13°) down.
Each connection of yoke to elevator is a continuous loop. Incorporated into the
loops adjacent to the actuators is a bungee cylinder filled with viscous fluid to
resist yoke / elevator movement in order to provide artificial feel to each yoke.
Each elevator also has a stability spring incorporated into the cable linkage to
provide a forward pull to the control yoke and to contribute additional feel input.
Both sides of the hydraulic actuators are monitored to assure correct operation.
The cockpit cable input motion must result in a corresponding actuator output
motion, and similarly the output side of the actuator should not move without
cockpit input. If input and output do not correspond, actuator hydraulic pressure is
bypassed to prevent movement of the elevator.
Anytime hydraulic pressure to the actuators is bypassed or lost (in the instance of
dual hydraulic system failure) the elevators remain operable with manual yoke
movement that positions the actuator shaft and connecting linkages to the
elevator. Control forces will be higher, since normal hydraulic assist provides a six
(6) to one (1) boost advantage to move the elevator surfaces.
Each elevator is equipped with a trim tab that uses aerodynamic pressure to aid in
positioning the control surface. The trim tabs are controlled manually by rotating a
wheel on the cockpit pedestal or electrically using switches on the control yokes.
Manual trim uses a dedicated braided wire connection from the cockpit to a
mechanical linkage in the tail. Electrical switch trim movement commands an
electric servo to move the same linkage.
Both the elevators and elevator trim incorporate Rotary Variable Differential
Transducers (RVDTs) to feed back position information to the autopilot for
elevator control and trim and to the ModularAvionics Units (MAUs) for formulation
of control surface position display on the Flight Controls 2/3 synoptic page. RVDTs
measure the angle of the elevators and trim tabs and transmit an electrical signal
proportional to displacement from a neutral position.
When the autopilot is engaged, the elevators are positioned by electric servos that
move parallel cable connections to the hydraulic actuators. The autopilot also
uses the electric trim servo to move the trim tabs, minimizing hydraulic actuator
force.
Page 8
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
If a malfunction or failure in any portion of the loopbetweenacockpityokeandthe
corresponding elevator prevents control surface movement, the mechanical
torque tube connection between the two control yokes can be separated to allow
control of the aircraft with the free (unjammed) elevator. The autopilot may be
used in single elevator operation.
2. Description of Subsystems, Units and Components:
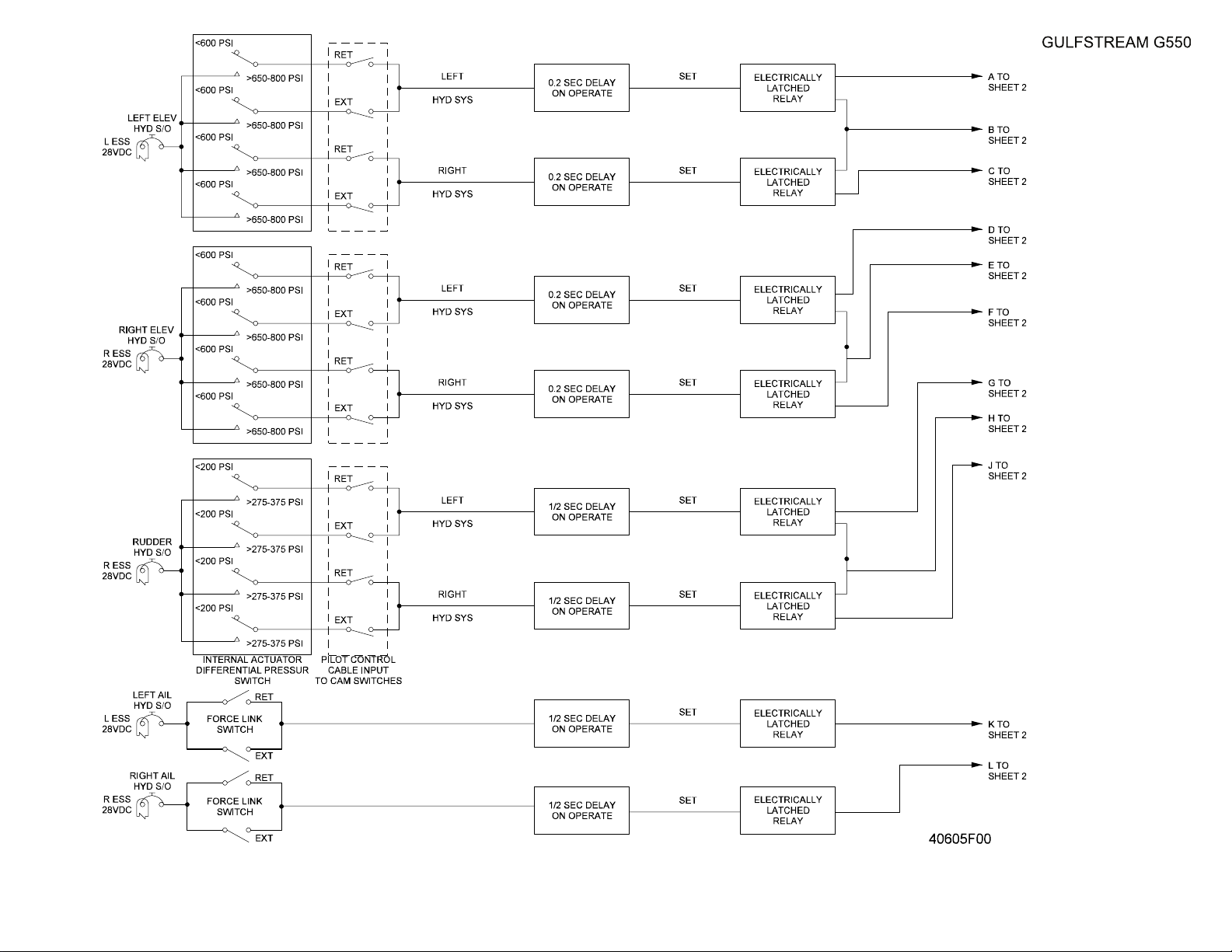
A. Elevator Hard Over Prevention System (HOPS):
Movements of the elevators contrary to the commanded position are
limited by a Hard Over Prevention System (HOPS), illustrated in Figure 3.
The system incorporates eight switches for each elevator to monitor
mechanical and hydraulic elevator operation. Four external mechanical
switches are integrated into the elevator control linkage to provide a
comparison reference for four switches mounted internally within the
hydraulic actuator. Of the four external switches, two are for left hydraulic
system reference and two are for right hydraulic system reference. Of the
two switches for each hydraulic system, one provides a up elevator
command reference and the other provides a down elevator command
reference. The switches are plunger-type contact switches, and are
installed on each side of a bracket attached to the command input side of
the elevator actuator. On one side of the bracket are the up elevator
command input switches for the left and right hydraulic systems. On the
other side of the bracket are the down elevator command input switches for
the left and right hydraulic systems. Inserted between the switches in the
bracket is a cam-type arm mated to the elevator hydraulic actuator output
linkage. The cam arm is positioned with a defined amount of clearance
between the plunger-type switches. Under normal conditions, the bracket
holding the switches moves with elevator command input and the cam arm
moves with the elevator hydraulic actuator output, so the clearance
between the switches and the arm is maintained.
If a malfunction occurs and the elevator moves opposite to or further from
the commanded direction, the cam arm that is attached to the output
linkage of the elevator actuator will move to close the clearance gap
between the cam arm and the plunger-type switches, making contact with
the switches on the side of the bracket. When the plungers of the switches
are depressed, a relay closes and an electrical signal is sent to a
corresponding set of switches mounted internally within the hydraulic
actuator.
Four pressure switches monitor left and right hydraulic system pressures
within the pistons of the elevator actuator. In normal conditions, all four
switches sense stabilized pressures since hydraulic outputs positioning the
elevator are balanced by air load pressures on the elevator surface acting
against actuator pressures. When a malfunction occurs and the elevator
moves contrary to the commanded direction, the hydraulic actuator shaft
moves in the contrary direction, causing an increase in hydraulic pressure
on the opposite sides of the pistons within the actuator. The left and right
system opposite side pressure switches close, completing the circuit
initiated by closure of the bracket plunger switches, and an electrical signal
is sent to a timing relay. If the contrary elevator movement persists for
longer than one tenth (1/10) of a second, hydraulic pressure from both left
an right systems is shut off to the elevator actuator.
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 9
August 14/03
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Left Hydraulic System Right Hydraulic System
Up
Elevator
←
Down
Elevator
→
Up
Elevator
←
Hydraulic Actuator Shaft
Pressure
Switch
Pressure
Switch
Pressure
Switch
In a similar manner, if a hydraulic malfunction causes the shaft of the
actuator to move in a direction opposite the commanded elevator direction,
the increased pressures in the wrong direction sides of the pistons would
close the monitoring switches, and movement of the actuator shaft would
cause the cam arm to contact the plunger switches on the external bracket,
and hydraulic pressure would be shut off to the elevator actuator after a
one tenth (1/10) of a second delay.
If a hydraulic malfunction in a single system (left or right) side of the
actuator moves the actuator shaft in a wrong direction, only the hydraulic
pressure of the malfunctioning system is shut off. For instance in a
stabilized condition, if the left hydraulic system piston attempts to move the
actuator shaft in the up direction, the increased pressure in the down
elevator side of the left piston will close the monitor switch and actuator
shaft displacement will close both the left and right hydraulic system up
elevator bracket plunger switches, completing the shut off circuit for the left
hydraulic system after a one tenth (1/10) second delay. (In this case
hydraulic pressure in the up elevator side of the right hydraulic system
piston will decrease due to the increase in area caused by actuator shaft
movement.) The elevator hydraulic actuator will continue to function using
the remaining hydraulic system.
The operation of the hydraulic shut off valves by the HOPS is signaled to
the MAUs (left elevator to MAU #1, right elevator to MAU #2) over ARINC429 connections. The shut off condition is monitored by the MWS, and a
CAS message corresponding to the condition is displayed on the CAS
window. If either or both hydraulic systems are shut off, an amber caution
message of “L (or) R Elevator Hydraulics Off” is displayed. If only a single
hydraulic system has been shut off, the remaining hydraulic system will
provide full elevator operation. If both hydraulic systems have been shut
off, manual elevator control may remain possible, depending upon the
cause of the hardover condition. If the cause of the condition is thought to
be momentary, and the use of the elevator is deemed necessary for
continued safe flight and landing, the hydraulic shut off valve(s) may be
reset by cycling the RIGHT ELEV HYD S/O and/or LEFT ELEV HYD S/O
circuit breaker. If the cause has not been rectified, the shut off valve(s) will
close and hydraulic boost for the elevator will be unavailable if both
hydraulic systems have been shut off. (HOPS is powered by the left
essential DC bus for the left elevator and the right essential DC bus for the
right elevator.)
To prevent the HOPS from shutting off hydraulic system pressure to the
elevator during normal flight maneuvers that may involve rapid changes in
elevator direction, HOPS activation is buffered by three elements:
• The clearance between bracket plunger switches and the actuator
Down
Elevator
→
Pressure
Switch
Page 10
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
cam arm
• Inertia in the build up of hydraulic pressures in the elevator actuator
• The one tenth (1/10) second delay in electrically latching the shut off
of hydraulic pressure
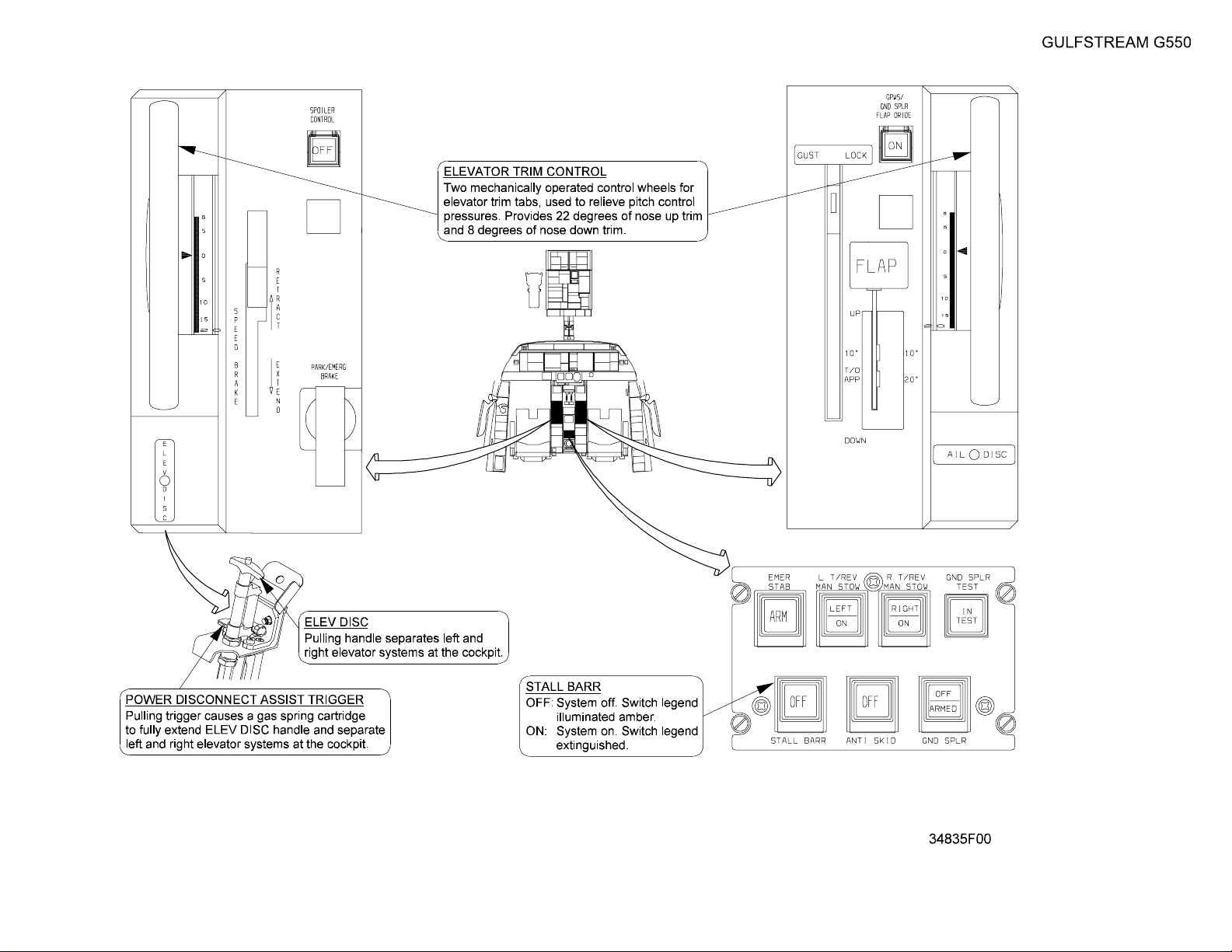
B. Elevator Disconnect Handle:
(See Figure 4.)
The mechanical torque tube beneath the cockpit connecting the pilot and
copilot yokes may be disconnected if a malfunction in one of the cable
connections, hydraulic actuators or elevators renders the respective
elevator inoperative. Disconnecting the torque tube prevents both elevators
from being disabled by a malfunction in one elevator linkage.
An elevator disconnect handle is located on the pilot side of the center
pedestal beneath a protective cover. The handle is connected by a cable to
a pin securing the two halves of torque tube together. Pulling out on the
disconnect handle removes the pin and allows each yoke to move
independently. If the elevator linkage malfunction has resulted in opposite
movement between the two yokes, making retraction of the mating pin
difficult, a power assist gas-spring cartridge may be activated to provide
additional force to remove the pin. The power assisted disconnect is
activated by pulling a trigger beneath the disconnect handle, and provides
an upward lifting moment of thirty-three feet per second (33 ft./sec).
After the yokes have been separated, the malfunctioning elevator is
isolated and the operable elevator may be used to control the aircraft. with
manual or autopilot inputs. If it is discovered that separating the yokes
freed the previously malfunctioning elevator linkage, the yokes may be
reconnected by pushing in on the disconnect handle when the yokes are
aligned, provided that the power assist disconnect was not used.Areset of
the yoke torque tube coupling is not possible without special maintenance
tools after activation of the power assist disconnect.
C. Pitch Trim System:
(See Figure 4 through Figure 6.)
Each elevator has a trim tab installed on the trailing edge. The trim tabs are
manufactured from the same graphite-epoxy material as the elevators, but
incorporate a ceramic heating element that is continuously electrically
powered to maintain a temperature of one hundred seventy-five degrees
Fahrenheit, plus or minus twenty degrees (175°F±20) around the tab
actuator linkage. Elevator trim heat is powered by 115V AC from the right
main bus. The trim tabs have a range of movement of twenty-two degrees
(22°) trailing edge down (aircraft nose up) to eight degrees (8°) trailing
edge up (aircraft nose down). Limit switches are installed at the travel limits
that will prompt the display of Crew Alerting System (CAS) messages
notifying the crew that the elevator trim tabs are at maximum displacement.
If a trim limit message is displayed while the autopilot is engaged, extreme
care should be taken prior to disengaging the autopilot. An abrupt attitude
change will occur if trim displacement is not moderated prior to
disengaging the autopilot.
Operation of the trim tabs employs aerodynamic force to maintain the
elevator in the desired position. As the trim tab is moved from the neutral
position (faired with the elevator) into the airstream, the air impinging on
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 11
August 14/03

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
the tab forces the hinged elevator into the opposite direction. As the
elevator is moved from the neutral position (faired with the horizontal
stabilizer), it also encounters pressure forces from the airstream, thus the
amount of elevator movement from neutral is determined by a balance of
airstream forces acting on both the trim tab and the elevator. Since the
surface area of the trim tab exposed to the airstream is less than the
surface area of the elevator, the elevator is deflected in much smaller
increments than trim tab displacement (excluding other factors, trim tab
effectiveness is a ratio of tab surface area to elevator surface area).
The flight crew manually controls the amount of trim tab deflection by
moving control wheels on either side of the center console. The wheels are
hubs connected to a common axial shaft, so that moving one wheel moves
the other. The shaft is connected to a continuous loop of wire cables that
connect through a series of pulleys and bellcranks to the elevator trim tabs.
Rotating a trim wheel forward positions the trim tab up forcing the elevator
down resulting in an aircraft nose down moment. Trim wheel rotation aft
results in an aircraft nose up moment.
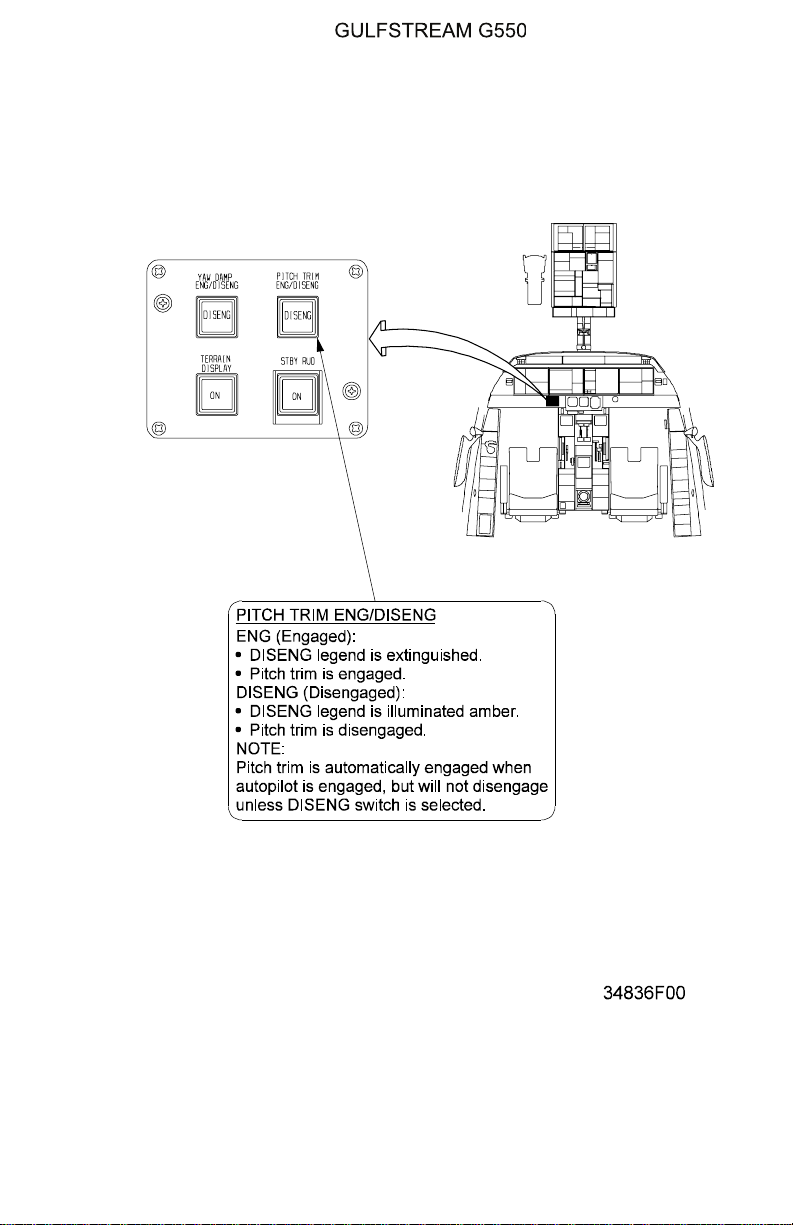
The flight crew has the option of electrically moving the elevator trim tabs.
A pushbutton, labelled PITCH TRIM ENG / DISENG, located to the left of
the standby flight instruments on the lower instrument panel enables
electrical operation of trim switches mounted on the outboard side of the
control yokes. Electric pitch trim is normally engaged. The amber DISENG
legend in the pushbutton will illuminate if the button is not pushed in to
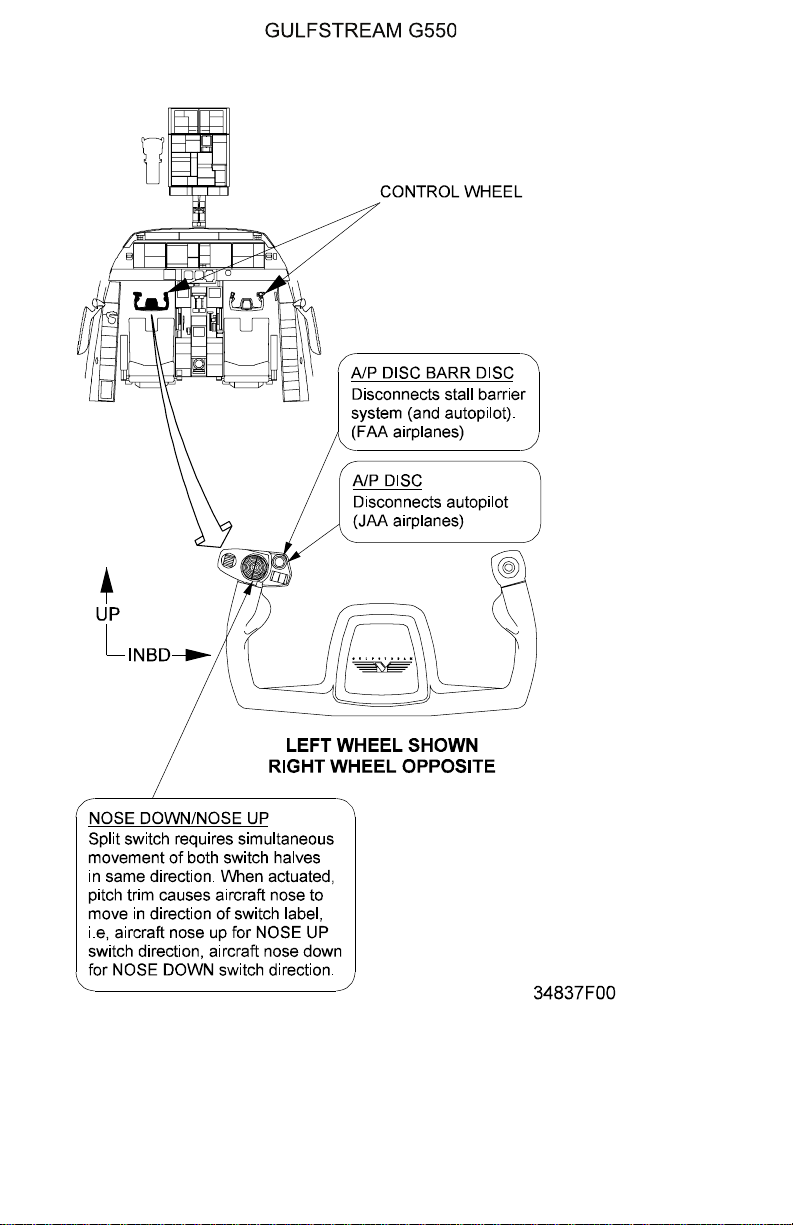
engage electric trim. The yoke trim switches are composed of split halves.
Both halves must be moved in the same direction to move the elevator
trim. The split switch design helps to prevent accidental trim input. The
switches are wired to an electric servomotor that is located in the tail of the
aircraft and incorporated into the cable linkage to the trim tabs. An electric
signal from a cockpit trim switch results in the servomotor rotating an
attached pulley, moving the elevator trim cable loop in the desired
direction. The manual trim wheels on the pedestal will rotate with electric
trim inputs, since the control cabling is a continuous loop.
When the autopilot is engaged, autopilot servomotors move the elevators
and also control elevator trim with the same servomotor employed by the
yoke electric trim switches. The PITCH TRIM ENG / DISENG switch is
automatically engaged whenever the autopilot is engaged (to enable
autopilot trim). However the reverse is not true - electric pitch trim will not
disengage when the autopilot is disengaged, but must be selected off with
the switch.
Elevator trim must be within a defined range for takeoff, with the specific
setting within the range determined by aircraft Center of Gravity (COG) and
takeoff gross weight. The limits of the acceptable pitch trim range are eight
degrees nose up to nineteen degrees nose up (8° - 19° up). The takeoff
elevator trim range is marked in green on the trim setting indices of the
manual trim wheels at each side of the center pedestal. The same limits
are shown in a green band on the trim scale of the Flight Controls 2/3
synoptic page. Failure to set pitch trim within the defined range will result in
a warning annunciation and CAS message as the power levers are
advanced for takeoff.
Page 12
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
D. Mach Trim:
The autopilot employs elevator control to provide the aircraft with Mach
trim. Mach trim is necessary because at high speed flight the center of lift
on the wing transits aft with increases in speed, producing a nose down
pitch moment termed Mach tuck. The autopilot electrically repositions the
elevator trim to neutralize the nose down force. Mach trim is an automatic
function of the Flight Guidance Computers.
NOTE:
The autopilot does not have to be engaged to provide
Mach trim. Automatic Mach trim is available whenever
the PITCH TRIM ENG/DISENG switch is engaged.
3. Controls and Indications:
(See Figure 4 through Figure 6.)
NOTE:
A full description of the Flight Controls 2/3 synoptic
page appears in section 2B-07-00.
A. Circuit Breakers (CBs):
The following CBs protect elevator pitch control:
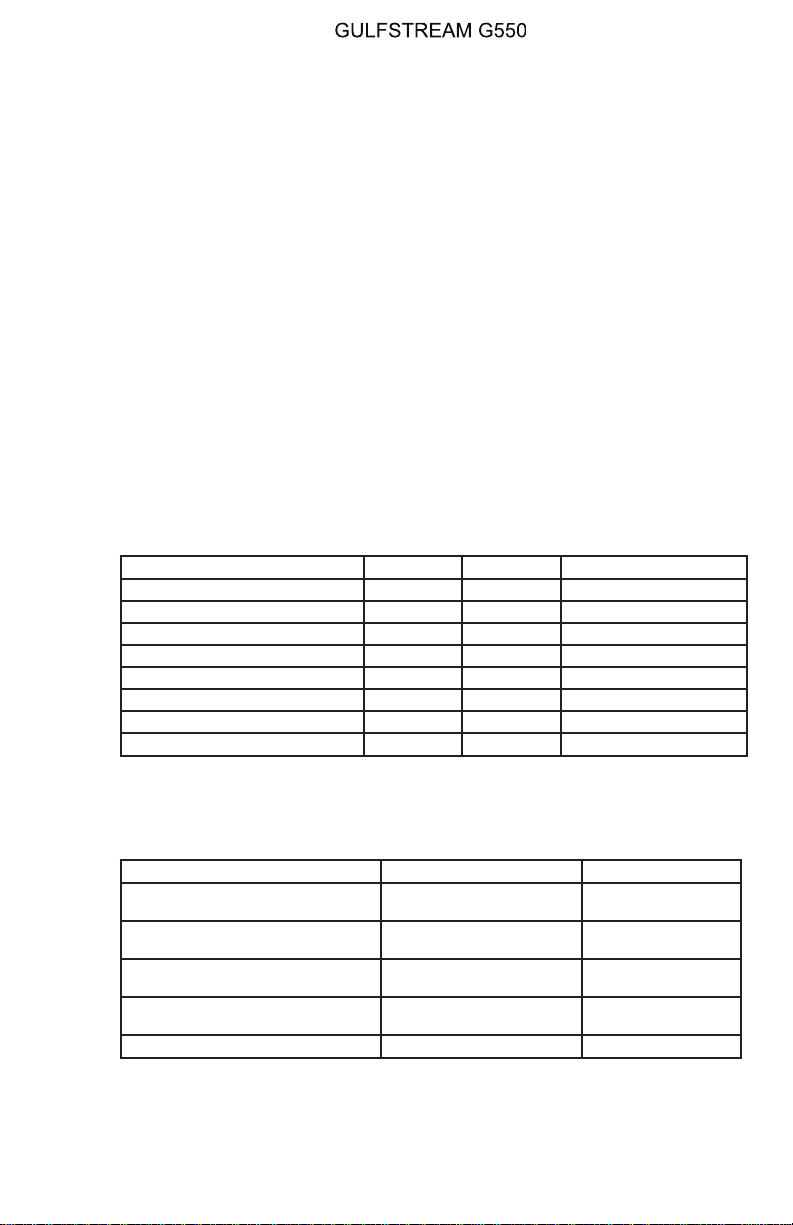
Circuit Breaker Name: CB Panel: Location: Power Source:
ELEV SERVO #1 POP D-4 L ESS DC Bus
ELEV SERVO #2 CPOP D-4 R ESS DC Bus
PITCH TRIM SERVO #1 POP E-2 L ESS DC Bus
PITCH TRIM SERVO #2 CPOP E-1 R ESS DC Bus
L ELEV TRIM HEAT REER E-16 R MAIN AC Bus
R ELEV TRIM HEAT REER F-16 R MAIN AC Bus
LEFT ELEV HYD S/O POP C-5 L ESS DC Bus
RIGHT ELEV HYD S/O CPOP C-5 R ESS DC Bus
B. Crew Alerting System (CAS) Messages:
The following CAS messages are associated with the elevator pitch
controls:
Area Monitored: CAS Message: Message Color:
Elevator Trim Tab RVDTs vrs
takeoff range
Elevator and Trim Tab RVDTs and
MAUs
Elevator and Trim Tab RVDTs and
MAUs
L/R Elevator HOPS and MAUs L/R Elevator Hydraulics
Aircraft Configuration Red
Elevator Mistrim Nose
Down
Amber
Elevator Mistrim Nose Up Amber
Off
Amber
Electric Pitch Trim Servos Elevator Trim 1-2 Fail Amber
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 13
August 14/03
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
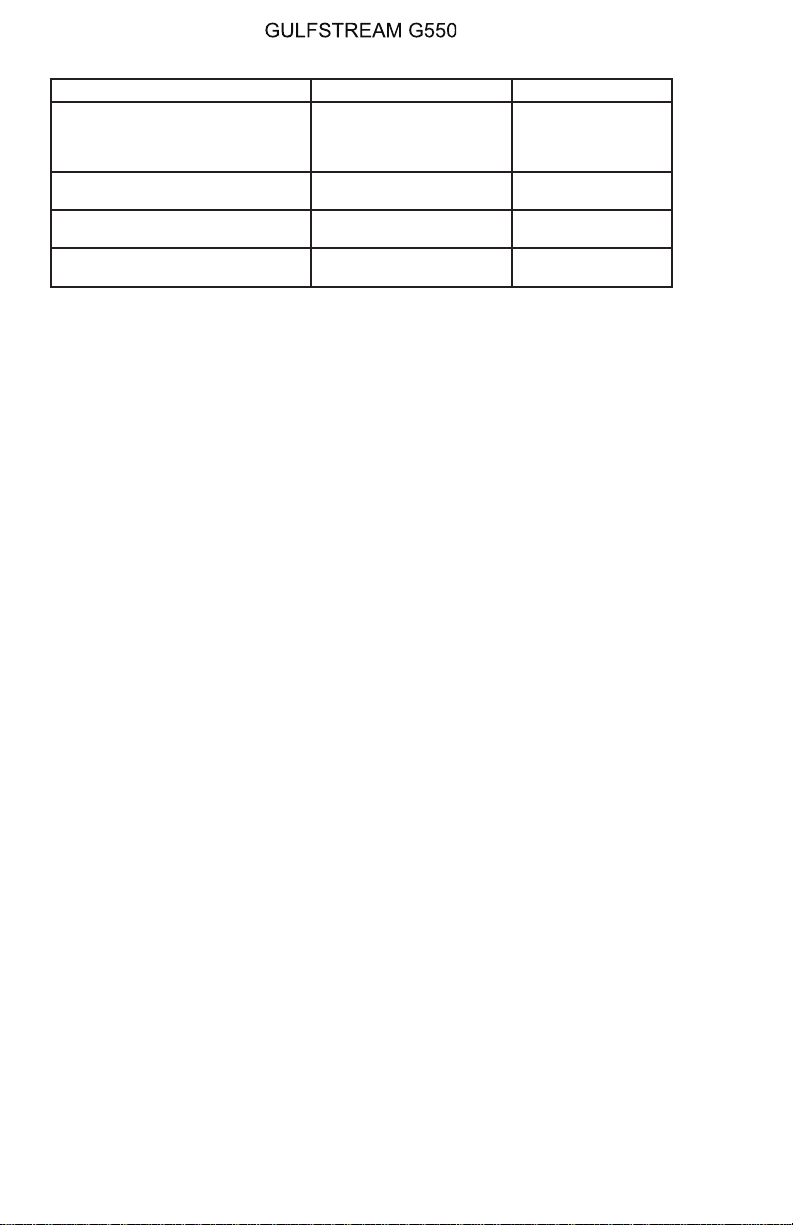
Area Monitored: CAS Message: Message Color:
Electric Pitch Trim Servos / Trim
ENG/DISENG Switch
Electric Pitch Trim Servos and
MAUs
Electric Pitch Trim Servos and
MAUs
Electric Pitch Trim Servos and
MAUs
Mach Trim Off
(inhibited below 0.82
Mach)
NOTE
Amber
Pitch Trim 1-2 Power Fail Blue
Elevator Trim Down Limit Blue
Elevator Trim Up Limit Blue
4. Limitations:
A. Mach Trim / Electric Elevator Trim Functions:
(1) Use of Mach Trim / Electric Elevator Trim Functions:
Mach trim / electric elevator trim must be ON during all flight
operations except as provided for in Section 05-02-40: Mach Trim
Failure.
(2) With both Mach Trim / Electric Elevator Trim Inoperative:
M
is reduced to 0.80MT.
mo
Page 14
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Hard Over Prevention
System (HOPS)
Figure 3 (Sheet 1 of 2)
2A-27-00
Page 15 / 16
August 14/03

Title Page
Prev Page
Next Page
TOC

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Hard Over Prevention
System (HOPS)
Figure 3 (Sheet 2 of 2)
2A-27-00
Page 17 / 18
August 14/03

Title Page
Prev Page
Next Page
TOC
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Pitch Flight Controls
System Controls and
Indications (Cockpit
Center Pedestal)
Figure 4
2A-27-00
Page 19 / 20
August 14/03

Title Page
Prev Page
Next Page
TOC
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Electric Pitch Trim Engage / Disengage Switch Controls and Indications
Figure 5
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 21
August 14/03
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
Page 22
August 14/03
Electric Pitch Trim / Stall Barrier System Controls and Indications
Figure 6
PRODUCTION AIRCRAFT SYSTEMS2A-27-00

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
2A-27-30: Rudder Yaw Control
1. General Description:
The flight crew controls the direction of the aircraft around the vertical axis by
movement of the rudder. The rudder panel is composed of graphite-epoxy fabric
baked at high temperatures to form a strong but light weight structure. The rudder
is positioned by inputs from the pilot or copilot rudder pedals, or by autopilot
electro-servos. The pilot and copilot rudder pedals are connected by a common
torque tube so that either may control rudder movement. (The individual pedal
pairs are adjustable to accommodate differences in pilot leg length.) The common
torque tube is connected by a bellcrank to a single stranded wire cable loop
located on the right side of the aircraft beneath the cockpit and cabin floor.(Since
there is only one rudder flight control surface, there is no need for dual cable
linkages from both yokes to the rudder, nor is there a need for a system to
separate pilot and copilot rudder pedal inputs to the rudder.) The cable loop
incorporates pulleys and bellcranks to route the cable around other installations
beneath the aircraft floor. At the end of the loop is a bellcrank connected to a dual
piston hydraulic actuator. The bellcrank translates movement of the control cable
into lateral displacement inputs to the actuator. The rudder control cable linkage is
illustrated in Figure 7 and the termination of the cable linkage at the rudder
actuator is shown in Figure 8. The actuator has a single shaft with a piston
chamber for each (left and right) hydraulic system. Both hydraulic systems
provide up to three thousand (3,000) psi pressure to assist in moving the rudder
surface. Internal regulator valves limit the pressure output of the two pistons within
the hydraulic actuator to a maximum of fifteen hundred (1,500) psi each to prevent
structural damage to the rudder and vertical stabilizer. The output end of the
hydraulic actuator shaft is connected to linkages that move the rudder around the
pivot point connections on the vertical stabilizer. If one hydraulic system fails, the
regulator valve of the remaining system shifts to provide up to three thousand
(3,000) psi to move the rudder. Additionally, in the event of dual hydraulic system
failures, the auxiliary (AUX) hydraulic pump will power the rudder using the left
system piston in the actuator provided sufficient fluid remains in the auxiliary
reservoir of the left hydraulic system. AUX hydraulic system power for the rudder
is activated by the selection of the STBY RUD (Standby Rudder) switch on the
lower portion of the pilot instrument panel to the left of the standby flight
instruments.
Mechanical stops are incorporated into the rudder mounting structure to physically
limit rudder displacement to a maximum of twenty-two degrees (22°) either side of
neutral, although full displacement is available only at low airspeeds. As airspeed
increases, the airload on the rudder surface increases proportionally. When the
airload on the rudder surface equals the available hydraulic pressure output of the
rudder actuator, no further rudder displacement is possible. The Monitor and
Warning System (MWS) software monitors aircraft speed, angle of attack and
rudder displacement to formulate an advisory message informing the flight crew
when maximum rudder displacement has been reached.
2. Description of Subsystems, Units and Components:
A. Yaw Damper and Autopilot Rudder Operation:
Automatic rudder compensation for aircraft yaw produced by dutch roll
inherent to swept-wing aircraft is provided by the yaw damper function of
the autopilot. The yaw damper function is engaged with the YAW DAMP
ENG / DISENG switch located on the lower pilot side instrument panel
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 23
August 14/03

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
adjacent to the STBY RUD switch, shown in Figure 9. The yaw damper is
normally engaged even if the autopilot is not operating. (The DISENG
legend in the switch will be illuminated amber if the yaw damper is not
engaged.) If the autopilot is engaged, the yaw damper must be engaged,
since autopilot rudder commands use the yaw damper circuits to displace
the rudder.
The yaw damper function is a redundant dual-channel installation. Yaw
damper channel #1 is controlled by the autopilot function hosted in
processor modules in Modular Avionics Unit (MAU) #1, channel #2 by MAU
#2. Each channel has a dedicated Electro-Hydraulic Servo Valve (EHSV)
internal to the rudder actuator. The autopilot processor detects an
uncommanded yaw displacement by monitoring data from the Inertial
Reference Units (IRUs). The autopilot processor signals a rudder
displacement to counter the aircraft yaw through an Actuator Input/Output
Processor (AIOP) module via ARINC-429 bus connection to the EHSV on
the rudder actuator. The amount of rudder displacement necessary is a
function of airspeed / Mach number, and the AIOP uses information from
the Air Data Application (ADA) in the MAU to determine the amount of
rudder to apply. A feedback loop from a Rotary Variable Displacement
Transducer to the AIOP confirms the rudder position. The maximum
amount of rudder displacement available to the yaw damper is five degrees
(5°).
Since only one yaw damper channel is necessary for rudder control, the
active channel alternates on each flight segment (a function of weight-onwheels) to prolong system life. If the active channel fails, the standby
channel will automatically assume yaw damper control.
The yaw damper function also provides a rudder input for aircraft turn
coordination provided the flaps are not set to thirty degrees (30°) or more.
The yaw damper will add up to five degrees (5°) of rudder in the direction
of turn without pilot rudder input.
Autopilot control of the rudder is the same functional process as the yaw
damper, but the amount of rudder displacement available to the autopilot is
greater (up to the 22° limit). Larger rudder inputs are necessary for the
lower airspeeds associated with coupled approaches or during single
engine operations.
B. Rudder Trim:
The rudder is trimmed by manual inputs from the trim wheel mounted on
the cockpit aft center pedestal (see Figure 10). There is no trim tab on the
rudder, rather the whole rudder panel moves in response to trim input. The
rudder may be displaced up seven and a half degrees (7½°) left or right
with trim commands. Rotation of the trim wheel moves a cable linkage to a
drum mounted adjacent to the rudder hydraulic actuator. Movement of the
trim wheel rotates the drum and a linkage attached to the drum moves the
shaft of the rudder actuator. The rudder actuator hydraulically positions the
rudder by the commanded amount of deflection, and the linkage from the
drum establishes the trimmed rudder position as a new neutral setting for
the actuator. Manual or yaw damper / autopilot rudder deflections are then
summed to the existing trimmed rudder displacement. (The autopilot does
not have a separate trim input to the rudder.)
Page 24
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
C. Rudder Limiting:
The G550 does not have a separate load limiter unit, but relies instead
upon MWS software to compute maximum rudder deflection for a given
airspeed, matching airloads on the rudder surface with the hydraulic
function of the rudder actuator.Although at low airspeeds full rudder travel
of twenty-two degrees (22°) is available, at higher airspeeds less rudder
travel is necessary to achieve the desired amount of aircraft heading
control. To avoid excessive loads, the rudder hydraulic actuator uses
internal pressure switches to signal the MWS when full hydraulic pressure
output of the actuator has been reached. The MWS formulates a CAS blue
advisory message text of “Rudder Limit” for display on the CAS window
indicating the maximum rudder hydraulic power assist condition.
The amount of rudder deflection at which maximum rudder hydraulic assist
occurs is dependent upon airspeed. As speed increases, air loads increase
as the rudder is displaced. Since the rudder surface is linked mechanically
to the rudder hydraulic actuator shaft, the force of the rudder airload
opposes the force of the hydraulic system(s) moving the actuator.
Whenever the airload force equals hydraulic system force (1,500 psi with
both left and right systems operating or 3,000 psi with a single hydraulic
system) no further rudder displacement is possible, and the “Rudder Limit”
advisory message is displayed on the CAS window.
D. Rudder Hard Over Prevention System (HOPS):
Movements of the rudder contrary to the commanded position are limited
by a Hard Over Prevention System (HOPS) that incorporates eight
switches to monitor mechanical and hydraulic rudder operation (see Figure
3. Four external mechanical switches are integrated into the rudder control
linkage to provide a comparison reference for four switches mounted
internally within the hydraulic actuator. The external HOPS switches are
noted on Figure 8. Of the four external switches, two are for left hydraulic
system reference and two are for right hydraulic system reference. Of the
two switches for each hydraulic system, one provides a left rudder
command reference and the other provides a right rudder command
reference. The switches are plunger-type contact switches, and are
installed on each side of a bracket attached to the command input side of
the rudder actuator. On one side of the bracket are the left rudder
command input switches for the left and right hydraulic systems. On the
other side of the bracket are the right rudder command input switches for
the left and right rudder systems. Inserted between the switches in the
bracket is a cam-type arm mated to the rudder hydraulic actuator output
linkage. The cam arm is positioned with a defined amount of clearance
between the plunger-type switches. Under normal conditions, the bracket
holding the switches moves with rudder command input and the cam arm
moves with the rudder hydraulic actuator output, so the clearance between
the switches and the arm is maintained.
If a malfunction occurs and the rudder moves opposite to or further from
the commanded direction, the cam arm that is attached to the output
linkage of the rudder actuator will move to close the clearance gap
between the cam arm and the plunger-type switches, making contact with
the switches on the side of the bracket. When the plungers of the switches
are depressed, a relay closes and an electrical signal is sent to a
corresponding set of switches mounted internally within the hydraulic
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 25
August 14/03
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
actuator.
Four pressure switches monitor left and right hydraulic system pressures
within the pistons of the rudder actuator. In normal conditions, all four
switches sense stabilized pressures since hydraulic outputs positioning the
rudder are balanced by air load pressures on the rudder surface acting
against actuator pressures. When a malfunction occurs and the rudder
moves contrary to the commanded direction, the hydraulic actuator shaft
moves in the contrary direction, causing an increase in hydraulic pressure
on the opposite sides of the pistons within the actuator. The left and right
system opposite side pressure switches close, completing the circuit
initiated by closure of the bracket plunger switches, and an electrical signal
is sent to a timing relay. If the contrary rudder movement persists for longer
than one half (½) second, hydraulic pressure from both left an right
systems is shut off from the rudder actuator.
Left Hydraulic System Right Hydraulic System
Left
Rudder ←
Right
Rudder →
Left
Rudder ←
Hydraulic Actuator Shaft
Pressure
Switch
Pressure
Switch
Pressure
Switch
In a similar manner, if a hydraulic malfunction causes the shaft of the
actuator to move in a direction opposite the pilot or yaw damper / autopilot
commanded direction, the increased pressures in the wrong direction sides
of the pistons would close the monitoring switches, and movement of the
actuator shaft would cause the cam arm to contact the plunger switches on
the external bracket, and hydraulic pressure would be shut off to the rudder
actuator after a one half (½) second delay.
If a hydraulic malfunction in a single system (left or right) side of the
actuator moves the actuator shaft in a wrong direction, only the hydraulic
pressure of the malfunctioning system is shut off. For instance in a
stabilized rudder condition, if the left hydraulic system piston attempts to
move the actuator shaft to the right, the increased pressure in the right side
of the left piston will close the monitor switch and actuator shaft
displacement will close both the left and right hydraulic system bracket
plunger switches, completing the shut off circuit for the left hydraulic
system after a one half (½) second delay. (In this case hydraulic pressure
in the right rudder side of the right hydraulic system piston will decrease
due to the increase in area caused by actuator shaft movement.) The
rudder hydraulic actuator will continue to function using the remaining
hydraulic system. During single hydraulic system operation the pressure
regulator valve will open, allowing the remaining hydraulic system pressure
output to increase up to three thousand (3,000) psi for rudder actuation.
The operation of the hydraulic shut off valves by the HOPS is signaled to
MAU #2 over an ARINC-429 connection. The shut off condition is
monitored by the MWS, and a CAS message corresponding to the
condition is displayed on the CAS window. If both hydraulic systems are
shut off, an amber caution message of “Rudder Hydraulics Off” is
displayed. Manual rudder control may remain possible, depending upon
Right
Rudder →
Pressure
Switch
Page 26
August 14/03
PRODUCTION AIRCRAFT SYSTEMS2A-27-00

OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
the cause of the hardover condition. If the cause of the condition is thought
to be momentary, and the use of the rudder is deemed necessary for
continued safe flight and landing, the hydraulic shut off valves may be reset
by cycling the RUDDER HYD S/O circuit breaker. If the cause has not been
rectified, the shut off valves will close and hydraulic boost for the rudder will
be unavailable. Loss of rudder hydraulic pressure will also prevent yaw
damper (and autopilot rudder) operation.
If only one hydraulic system is shut off to the rudder, the remaining system
will provide full boost to the rudder and yaw damper / autopilot rudder
operation. The amber caution CAS message of ”Rudder Hydraulics Off will
be accompanied by a blue advisory “Single Rudder” message.
To prevent the HOPS from shutting off hydraulic system pressure to the
rudder during normal flight maneuvers that may involve rapid changes in
rudder direction, HOPS activation is buffered by three elements:
• The clearance between bracket plunger switches and the actuator
cam arm
• Inertia in the build up of hydraulic pressures in the rudder actuator
• The one half (½) second delay in electrically latching the shut off of
hydraulic pressure
E. Standby Rudder System:
In the event that both hydraulic systems fail during flight, the Auxiliary
(AUX) hydraulic pump can be used to pressurize the left hydraulic system
to actuate the rudder and yaw damper provided that fluid remains in the left
system reservoir and there is no leak in the left hydraulic system lines
connecting to the rudder actuator. The AUX hydraulic pump, located in the
right main landing gear wheel well, is powered by left essential DC bus and
can provide three thousand (3,000) psi at a flow rate of two (2) gallons per
minute. Normally the AUX is used to actuate the flaps, ground spoiler
servos, brakes and nose wheel steering in the event of a dual hydraulic
system failure. However a valve in the left hydraulic system plumbing,
controlled by the STBY RUD switch on the lower portion of the pilot
instrument panel, can be used to divert the total output of the AUX
hydraulic pump to the left hydraulic system piston of the rudder actuator.
Powering the rudder and yaw damper, especially at higher altitudes,
provides dutch roll compensation and avoids the airspeed restrictions
necessary without an operating yaw damper. As the aircraft descends to
lower altitudes and airspeeds during the approach phase, airloads on the
rudder are reduced and manual rudder control is adequate for steering
commands. The STBY RUD switch can then be selected off to enable the
AUX hydraulic pump to provide the pressure for flap extension, pressurize
ground spoiler servos, wheel brakes and nose wheel steering during
landing. If the STBY RUD switch is not selected off prior to landing, the
standby rudder valve will automatically close when the nose gear weighton-wheels (WOW) switch is compressed on landing, enabling AUX pump
power for stopping and steering the aircraft.
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 27
August 14/03
OPERATING MANUAL
Title Page
Prev Page
Next Page
TOC
3. Controls and Indications:
(See Figure 9 and Figure 10.)
NOTE:
A full description of the Flight Controls 2/3 and
Hydraulics 2/3 synoptic pages appears in section
2B-07-00.
A. Circuit Breakers (CBs):
The following CBs protect the rudder flight controls:
Circuit Breaker Name: CB Panel: Location: Power Source:
RUDDER HYD S/O CPOP C-3 R ESS DC Bus
YAW DAMP SERVO #1 POP D-6 L ESS DC Bus
YAW DAMP SERVO #2 CPOP D-6 R ESS DC Bus
AUX HYD PUMP LEER C-16 L ESS DC Bus
B. Crew Alerting System (CAS) Messages:
The following CAS messages are associated with the yaw flight controls
system:
Area Monitored: CAS Message: Message Color:
Rudder Hydraulic Shutoff Valves Rudder Hydraulics Off Amber
Yaw Damper Servo Valves Yaw Damper 1-2 Fail Amber
YAW DAMP ENG/DISENG Switch Yaw Damper Off Amber
Autopilot, YAW DAMP ENG/
DISENG Switch
MWS Software, Aircraft Speed,
Rudder Position (RVDT)
No YD Turn Coordination Blue
Rudder Limit Blue
Rudder Hydraulic Shutoff Valves Single Rudder Blue
Standby Rudder Switch / AUX
Pump
Standby Rudder Hyd On Blue
Yaw Damper Servo Valves YD 1-2 Power Fail Blue
4. Limitations:
Page 28
August 14/03
A. Yaw Damper Inoperative Speeds:
Maximum Speeds:
• Above 10,000 Feet: 260 KTS / 0.80 MT
• Below 10,000 Feet: 250 KCAS
Minimum Speeds:
• Above 20,000 Feet: 210 KTS
• Below 20,000 Feet:
The minimum speed is in accordance with the following schedule
until ready to configure for approach and landing. V
the airspeed tape of the PFD, is the approach speed for landing for
the current flap setting.
PRODUCTION AIRCRAFT SYSTEMS2A-27-00
REF, as shown on
Minimum Speeds: Yaw Damper Inoperative
Title Page
Prev Page
Next Page
TOC
Flaps 0, 10,
Fuel - lb
23,000 V
24,000 V
25,000 V
26,000 V
27,000 V
28,000 V
29,000 V
30,000 V
31,000 V
32,000 V
33,000 V
34,000 V
35,000 V
36,000 V
37,000 V
38,000 V
39,000 V
40,000 V
41,000 V
41,300 V
OPERATING MANUAL
Sea Level to 5000 ft 5000 to 20,000 ft
20
REF VREF VREF 135
REF VREF VREF 141
REF VREF VREF 147
REF VREF VREF 153
REF VREF VREF 159
REF VREF 147 160
REF VREF 153 160
REF VREF 158 160
REF VREF 163 160
REF VREF 168 160
REF VREF 174 160
REF VREF 179 160
REF VREF 184 160
REF VREF 189 160
REF VREF 195 160
REF VREF 200 160
REF VREF 205 160
REF VREF 211 160
REF VREF 216 160
REF VREF 217 160
Flaps 39
Flaps 0, 10,
20
Flaps 39
PRODUCTION AIRCRAFT SYSTEMS 2A-27-00
Page 29
August 14/03
 Loading...
Loading...