

Page 1

CyScan AS Operator’s Guide
W
A
R
R
A
N
T
Y
S
e
e
o
u
r
s
t
a
n
d
a
r
d
t
e
r
m
s
o
f
s
a
l
e
Q
U
A
L
I
T
Y
A
S
S
U
R
E
D
3
YEAR
Guidance Marine Ltd, 5 Tiber Way, Meridian Business Park, Leicester, LE19 1QP, UK
T: +44116 229 2600 E: sales@guidance.eu.com
featuring
CyScan AS Dashboard
www.guidance.eu.com
www.marine.direct
Page 2

CyScan AS Operator’s Guide
LASER
1M
Print Colour
Black
Print Colour
Yellow
100.00 mm
Scale 1:1
Material
White
Issue Date: 22/02/2018
Document No: 94-0560-B
Serial No:
Sensor Software Version: Dashboard Software Version:
Date of Shipment from UK:
Guidance Marine Ltd,
5 Tiber Way
Meridian Business Park
Leicester
LE19 1QP
UK
Tel: +44 116 229 2600
UK Support: +44 116 229 2665
(365 days a year, 08:00 - 20:00 hours UTC)
customerservices.uk@guidance.eu.com
USA Support: +1 504 305-1120
customerservices.us@guidance.eu.com
Asia Support: +65 6734 6365
customerservices.sg@guidance.eu.com
Web: www.guidance.eu.com/customer-support
Copyright © Guidance Marine Limited. All Rights Reserved.
Copyright in the whole and every part of this document belongs to Guidance Marine
Limited (the “Owner”) and may not be used, sold, transferred, copied or reproduced in
whole or in part in any manner or form or in or on any media to any person other than
in accordance with the terms of the Owner’s Agreement or otherwise without the prior
written consent of the Owner. “CyScan” is a registered trademark of Guidance Marine
Ltd. All other brand or product names are trademarks or registered trademarks of their
respective companies or organisations.
Class 1M Laser Product
Complies with EN 60825-1
Complies with USA CFR 1040.10 & 1040.11
except for deviations pursuant to Laser Notice
No 50 26 Jul 2001
l
2
Page 3
Table of Contents
Introduction ......................................................................................................5
Welcome �����������������������������������������������������������������������������������������������������������������������6
System Overview ����������������������������������������������������������������������������������������������������������7
CyScan Sensor Part Names ����������������������������������������������������������������������������������������� 8
Getting Started.................................................................................................9
Start Up and Shut Down ��������������������������������������������������������������������������������������������10
Start Up ����������������������������������������������������������������������������������������������������������������������������������������������� 10
Shut Down ������������������������������������������������������������������������������������������������������������������������������������������� 10
Screen Layout ������������������������������������������������������������������������������������������������������������11
Main Screen and Bird's Eye View (BEV) ����������������������������������������������������������������������������������������������12
Side Bar ����������������������������������������������������������������������������������������������������������������������������������������������� 14
Hotkey Buttons ������������������������������������������������������������������������������������������������������������������������������������ 15
Menu Pane ������������������������������������������������������������������������������������������������������������������������������������������16
Coordinates View ���������������������������������������������������������������������������������������������������������������������������������17
Tracking Information Quality ��������������������������������������������������������������������������������������� 18
Display Settings ����������������������������������������������������������������������������������������������������������19
Vessel Orientation �������������������������������������������������������������������������������������������������������20
Tracking Basics .............................................................................................. 21
Dynamic blanking zones ��������������������������������������������������������������������������������������������22
Setting the Dynamic blanking zone �����������������������������������������������������������������������������������������������������22
Working with Reflections ��������������������������������������������������������������������������������������������23
Basic Refections Data �������������������������������������������������������������������������������������������������������������������������23
Extended Reflection Data �������������������������������������������������������������������������������������������������������������������� 24
Scanner Tilt Controls �������������������������������������������������������������������������������������������������� 25
Scanner Tilt Modes ������������������������������������������������������������������������������������������������������������������������������25
Manually Tilting the Scanner ���������������������������������������������������������������������������������������������������������������26
Spirit Level ������������������������������������������������������������������������������������������������������������������������������������������� 26
Single and Multi-Target Tracking ............................................................ 27
Types of Target Symbols ��������������������������������������������������������������������������������������������28
Introduction to Single and Multi-Target Tracking �������������������������������������������������������29
To Start Tracking ���������������������������������������������������������������������������������������������������������������������������������� 29
To Stop Tracking ���������������������������������������������������������������������������������������������������������������������������������� 29
Positional Display Modes ������������������������������������������������������������������������������������������� 31
Bow and Starboard Axes ��������������������������������������������������������������������������������������������������������������������� 32
A and B Axes (A Pos and B Pos) ��������������������������������������������������������������������������������������������������������� 32
Selecting Targets for Multi-Target Tracking ����������������������������������������������������������������33
Selecting Reflections ��������������������������������������������������������������������������������������������������������������������������� 33
Target Selection Order �������������������������������������������������������������������������������������������������������������������������34
Target Selection Order and Coordinate Axes Direction ����������������������������������������������������������������������� 35
Aligning Multi-Target Heading ������������������������������������������������������������������������������������36
Multi-Dashboard (Ethernet) CyScan Systems .................................... 37
CyScan Ethernet Dashboard - Monitoring Mode ������������������������������������������������������� 38
CyScan Ethernet Dashboard - In Command Mode ���������������������������������������������������39
Support Information ................................................................................... 40
Serial Numbers and Software Versions ���������������������������������������������������������������������� 41
DP Feed ���������������������������������������������������������������������������������������������������������������������� 42
To View DP Feed Details: ���������������������������������������������������������������������������������������������������������������������42
Manual Power Control ������������������������������������������������������������������������������������������������ 43
To Enable Manual Power Control: �������������������������������������������������������������������������������������������������������43
To Use Manual Power Control: ������������������������������������������������������������������������������������������������������������43
To Disable Manual Power Control: ������������������������������������������������������������������������������������������������������43
Ethernet Sensor Data Logging ����������������������������������������������������������������������������������� 44
Serial Sensor Data Logging ���������������������������������������������������������������������������������������� 45
Troubleshooting ........................................................................................... 46
Problems and Possible Remedies������������������������������������������������������������������������������47
Cleaning the Sensor and Targets �������������������������������������������������������������������������������48
l
3
Page 4
Table of Contents (Continued)
CyScan Fuse Information ������������������������������������������������������������������������������������������� 49
Additional Information ............................................................................... 50
Target Types ���������������������������������������������������������������������������������������������������������������51
Targets-Installation and Position ��������������������������������������������������������������������������������52
Low Temperature Operation ���������������������������������������������������������������������������������������53
Using the On Screen Keyboard ����������������������������������������������������������������������������������54
Working with Alarms ���������������������������������������������������������������������������������������������������55
Filtering Alarms ������������������������������������������������������������������������������������������������������������������������������������ 55
Using the Historic Alarm List ��������������������������������������������������������������������������������������������������������������� 56
Network Communications Settings ����������������������������������������������������������������������������57
CyScan System Specifications ����������������������������������������������������������������������������������58
Index ��������������������������������������������������������������������������������������������������������������������������� 59
Document History ������������������������������������������������������������������������������������������������������61
l
4
Page 5
Introduction
This section contains the following pages:
Welcome (page 6)
•
System Overview (page 7)
•
CyScan Sensor Part Names (page 8)
•
l
5
Page 6
Welcome
Welcome to the CyScan AS operator's guide.
Getting Started (see page 9) explains the basics that you’ll need to know before using
the CyScan system for the first time.
The CyScan system can be installed either as a single-Dashboard serial system or as a
multi-Dashboard Ethernet system.
The majority of the sections in this guide apply equally for serial or Ethernet configured
systems and explain how to perform the various tasks necessary to operate the system
and use it for tracking. These include
and Multi-Target Tracking (see page 27), Support Information (see page 40) and
Troubleshooting (see page 46). The section Multi-Dashboard (Ethernet) CyScan
Systems (see page 37) gives information specific to an Ethernet configured system.
Note that whilst we endeavour to describe the functionality of the Dashboard correctly in
this document, we do not guarantee that it exactly represents the version of Dashboard
that you are running, particularly after any future upgrades to the software.
Tracking Basics (see page 21) and Single
l
6
Page 7
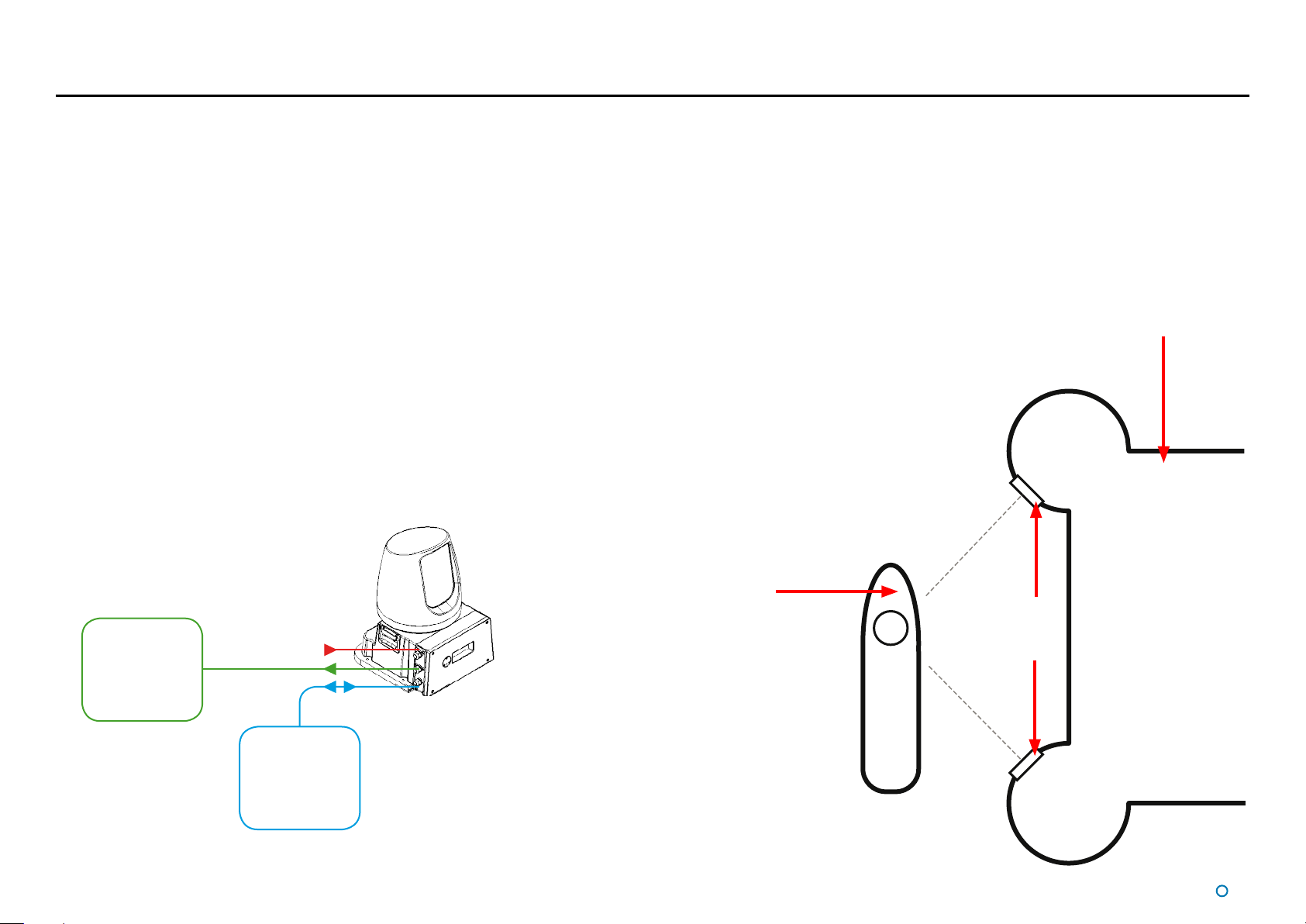
System Overview
The CyScan System is based on a high accuracy laser sensor and provides positional
information to allow automated approach and/or station keeping relative to a structure or
vessel. It requires one or more reflective targets to be attached to the sides of the structure
or vessel.
The CyScan system is designed to be semi-portable and straightforward to operate. Its
key elements are:
The CyScan Sensor, with integrated Power Supply Unit, which is mounted on the
•
vessel (typically on the wheelhouse) as required.
The CyScan Client Software: The CyScan Dashboard is a monitoring and control
•
application running within Microsoft Windows
other computer. This provides the DP operator with status information and control of
the system and the data stream being fed to the DP system. The CyScan Service
Interface is used for system installation and maintenance. This replaces the Service
Access function in earlier versions of the CyScan Dashboard and Console.
The CyScan Targets. Retro-reflectors consisting of high performance prism clusters
•
for longer-range capability.
TM
on a Type 3 Marine Processor or
CyScan
DP
Power
Sensor
System
CyScan emits eye-safe infrared light and detects the reflections received back from one or
more targets mounted on designated structures or vessels. The range and bearing of the
target(s) are accurately measured, displayed on the Dashboard screen and automatically
transmitted to the vessel's DP system.
CyScan
Vessel
C
CyScan
Targets
Structure
or Vessel
Client
Software
Computer(s)
The key elements of the CyScan system
l
7
Page 8
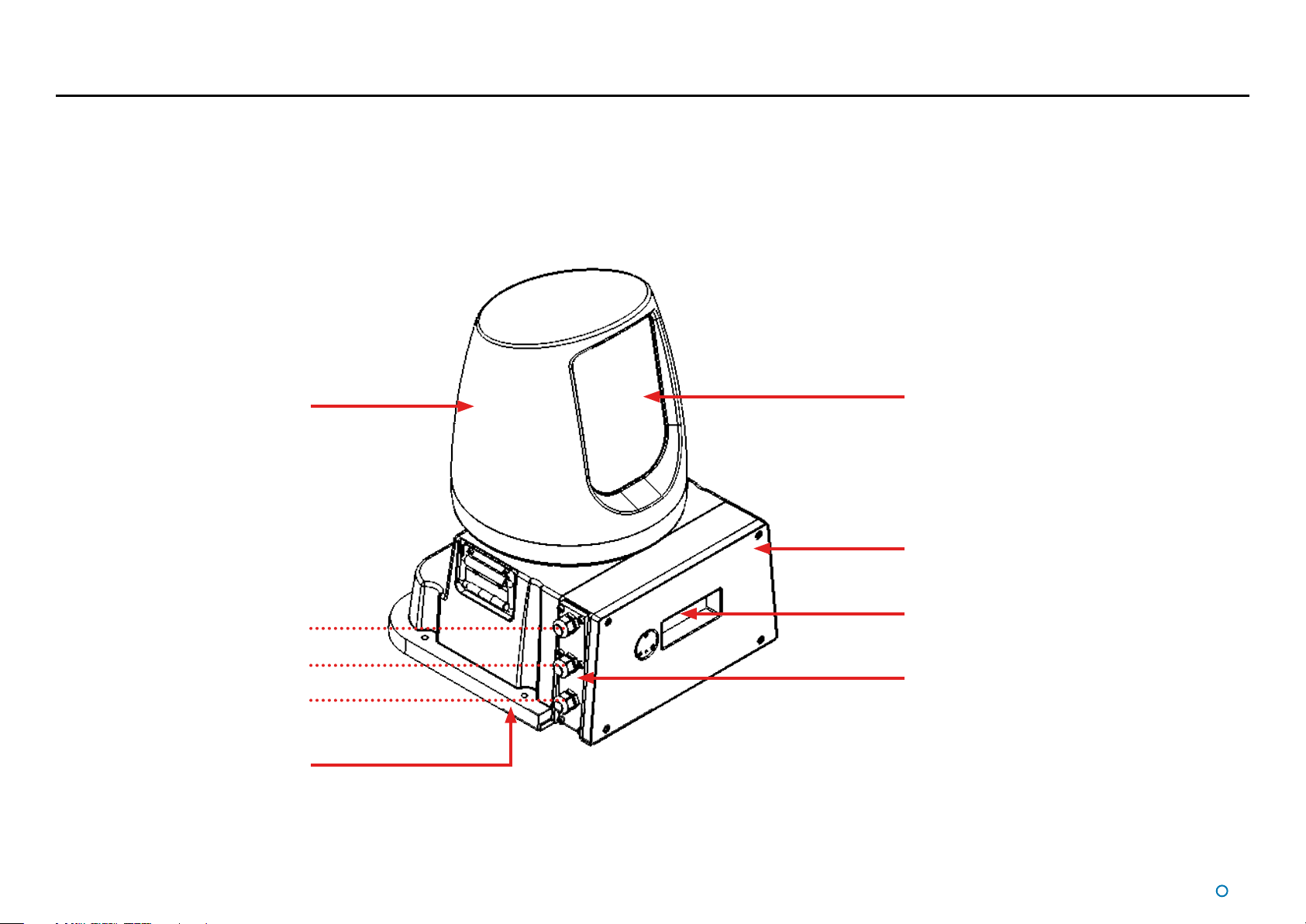
CyScan Sensor Part Names
The diagram below illustrates various parts of the sensor unit and gives the terms used for them.
Rotor
Power
DP Feed
Client Data
Base Plate
Optical Window
Access Plate
Sensor Information
Display
Cable Gland Plate
l
8
Page 9
Getting Started
This section contains the following pages:
Start Up and Shut Down (page 10)
•
Screen Layout (page 11)
•
Tracking Information Quality (page 18)
•
Display Settings (page 19)
•
Vessel Orientation (page 20)
•
You may also find the following sections of the Appendices useful at this stage:
Using the On Screen Keyboard (page 53)
•
Working with Alarms (page 54)
•
l
9
Page 10
Start Up and Shut Down
Start Up
To Start CyScan Dashboard
1. Ensure that the CyScan sensor is powered on.
2. Double-click on the CyScan Dashboard icon.
(Or run the CyScan Dashboard application from
Start > All Programs > Guidance Marine Ltd >
CyScan > CyScan Dashboard).
3. The Dashboard display screen will appear.
If the sensor is currently suspended, the main part of
the screen will be greyed out. Click on the Resume
button in the side bar in order for the sensor to begin
scanning and for the results to be displayed on the
screen. If the sensor was already scanning, any targets
in view will be displayed straight away.
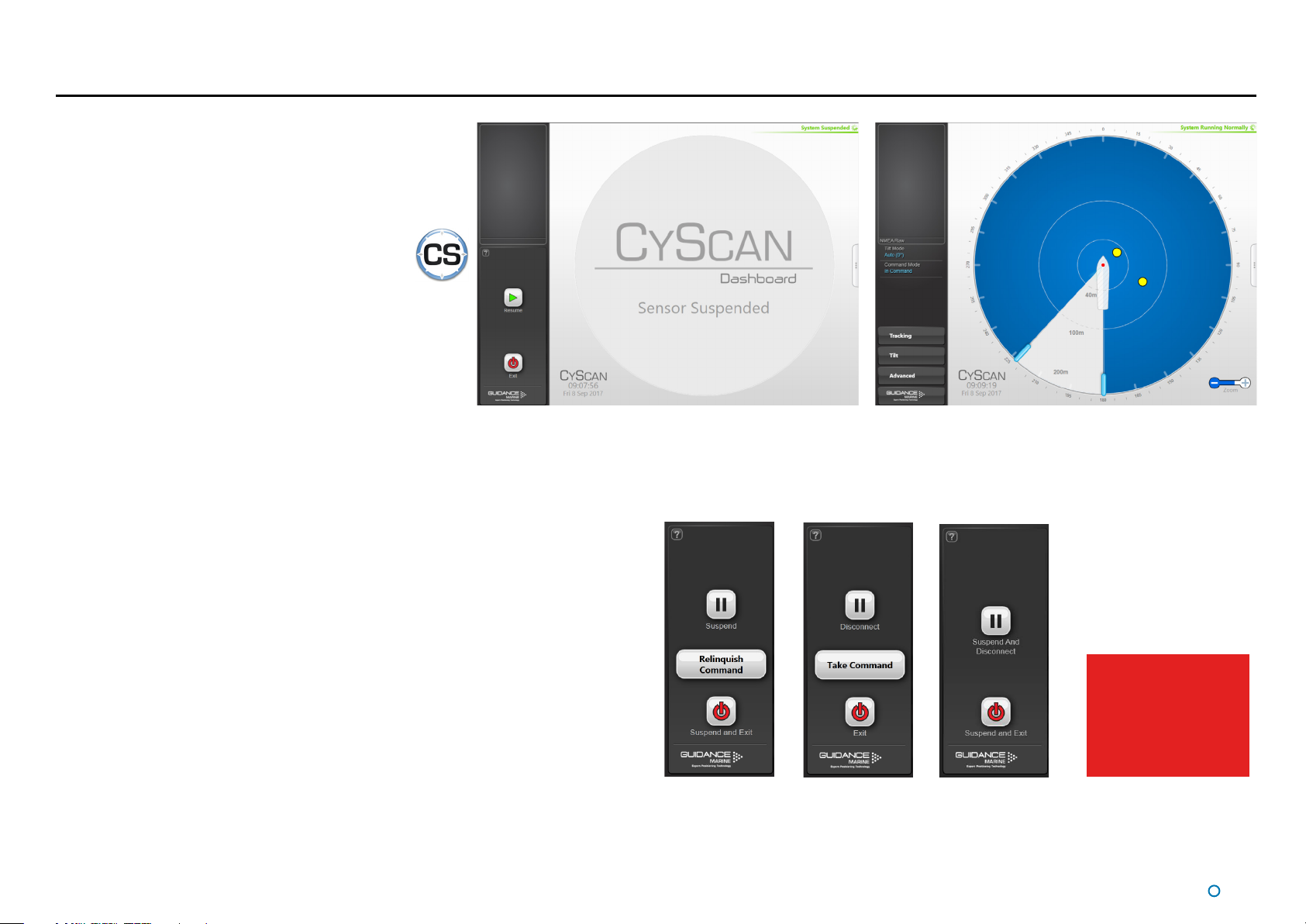
Shut Down
To Suspend, Exit or Disconnect
1. Click on the Guidance button in the lower left corner of the screen
This will reveal buttons in the side bar as follows: (see right).
Dashboard screen with sensor suspended Dashboard screen with sensor scanning
Suspend - Places the sensor into a ‘sleep mode’. The rotor ceases spinning and the
•
scanner tilt returns to a fixed state. However, upon command from the Dashboard
application, the unit will return to full operation. This mode is suitable for use when
travelling between locations.
Disconnect - Ceases communications between the Dashboard and sensor and
•
causes the main part of the screen to be greyed out. Does not cause the sensor to
stop spinning or tracking targets.
Suspend And Disconnect – A combination of the above two functions (Serial
•
Dashboard only).
Suspend And Exit - Places the sensor into the same ‘sleep mode’ as the suspend
•
command (discussed above) and also closes the CyScan Dashboard program.
Exit - Closes down the Dashboard without affecting the sensor.
•
Dashboard
In Command
Dashboard
Monitoring
Serial
Dashboard
See Multi-Dashboard
(Ethernet) CyScan
Systems (page 37)
for information on In
Command/Monitoring
functionality.
10
l
Page 11
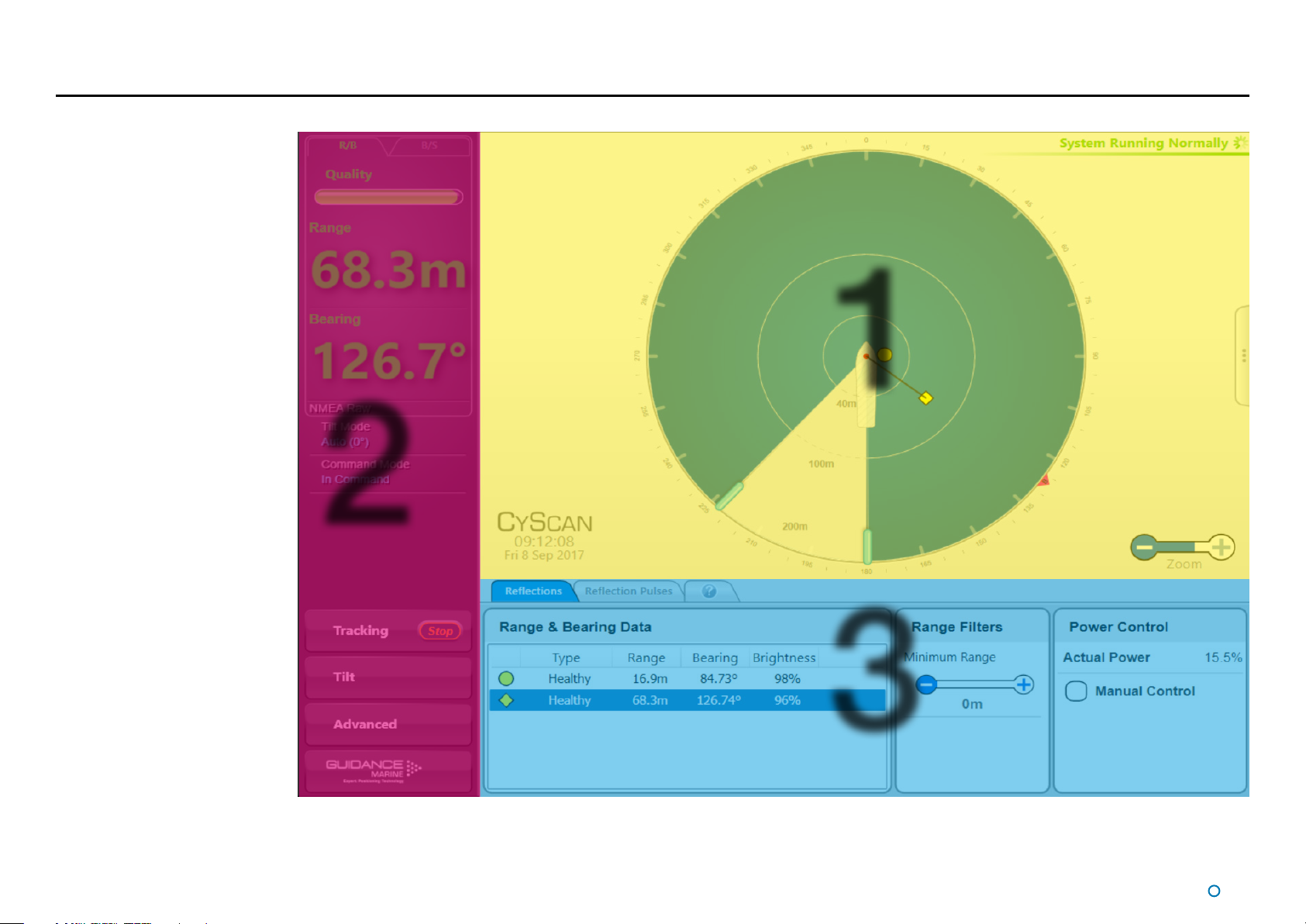
Screen Layout
The CyScan Dashboard screen is
split into three distinct sections,
these are:
1. Main Screen and Bird's
•
Eye View (BEV) (see page
12)
2. Side Bar (see page 14)
•
3. Menu Pane (see page
•
16)
1
2
3
l
11
Page 12

Screen Layout (Continued)
Main Screen and Bird's Eye View (BEV)
The centre of the circular BEV represents
the CyScan sensor and it shows the relative
positions of the CyScan vessel and any detected
reflections.
Vessel Outline
The length and breadth of the vessel and the
offsets and orientation of the CyScan sensor
within it can be configured using the CyScan
Service Interface (see Installer's Guide) so
that the vessel image is correctly scaled and
positioned on the BEV.
Dynamic Blanking Zone
The dynamic blanking zone is the sector within
each revolution of the sensor rotor where the
laser is switched off. This is used by the DP
operator to mask out unwanted reflections when
needed. The dynamic blanking zone can be
adjusted using the Drag Handles, to suit different
situations (See
page 22).
Range Circles
The Range Circles act as a visual guide to show
the distance between the CyScan vessel and
the detected reflections. Distances are shown in
metres from the CyScan sensor. Use the Zoom
Control to change the scale of the display. (See
page 13).
Radial Markers
These form an angular scale in degrees,
clockwise around the circumference of the BEV.
Zero is defined by the bow of the vessel, or by a
line between the primary and secondary targets,
depending upon the selected tracking mode, DP
format and display coordinates.
Dynamic Blanking Zones on
Static
Blanking Zone
Heading Tag
Vessel Outline
Range Circles
Radial Markers
Bearing Tag
Reflection Images
Blanking Zone
Dynamic
Blanking Zone
Drag Handles
Dynamic
Status Display
Hotkeys Tab
Zoom Control
Hotkeys Menu
l
12
Page 13
Screen Layout (Continued)
Reection Images
Reflections from AS prisms are shown as yellow circles whereas reflections from other
reflectors are shown as grey circles. The reflections have a black outline to help in situation
where 2 reflections need to be overlayed on the screen. For tracking you must select the
reflection(s) that correspond to the physical target(s) to be used. The set of reflections
selected for tracking are displayed as diamonds joined by cyan connecting lines (see
Selecting Reflections on page 33). If the system loses sight of a tracked target then the
target indicator changes to a red diamond.
Bearing and Heading Tags
These are displayed on the Radial Marker when the system is in tracking mode, to indicate
the bearing of the primary (or only) target and the vessel's heading. The visibility of these
two elements depends on the DP format selected and which coordinate system is being
used to display the positional information (see
Zoom Control
Click on the left-hand side of the control (marked '-') to zoom out of the display and on
the right-hand side ('+') to zoom in. The display can also be zoomed by using the mouse
wheel when the cursor is positioned over the BEV. For touchscreen displays that supports
2 or more touch points, pinch-to-zoom also works from the BEV.
Positional Display Modes on page 31).
Status Display
This consists of two fields:
Primary
The primary part of the Main Screen. It indicates the current status of the system (e.g.
running, suspended, disconnected or error).
Secondary
The secondary status display is located in the lower right corner of the Main Screen
(beneath the zoom control) and is normally hidden. It displays a flashing message for
a number of seconds in order to confirm an action taken by the user, e.g. grabbing a
screenshot or enabling/disabling the on-screen keyboard. It can also display a persistent,
static message if there is a communications problem.
l
13
Page 14
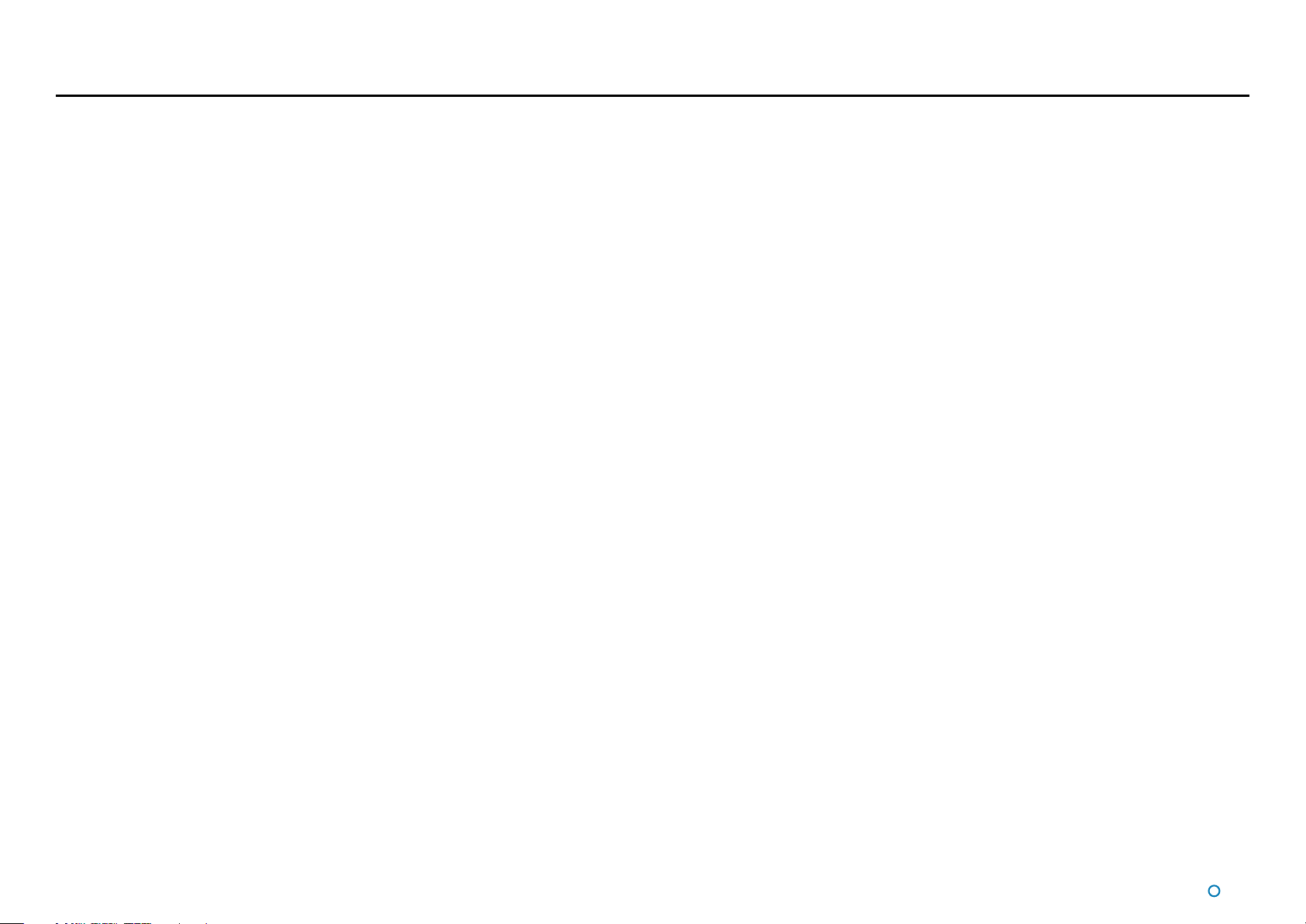
Screen Layout (Continued)
Side Bar
The Side Bar, the black pane to the left of the BEV, contains control and display
components in addition to the coordinates pane.
Toggle Coordinate Type
Signal Quality
Coordinate Data
DP Message Format
After pressing the
Current Tilt Mode
and Command Mode
Guidance button:
Stop Tracking Button
(visible only whilst tracking)
Guidance Button
l
14
Page 15
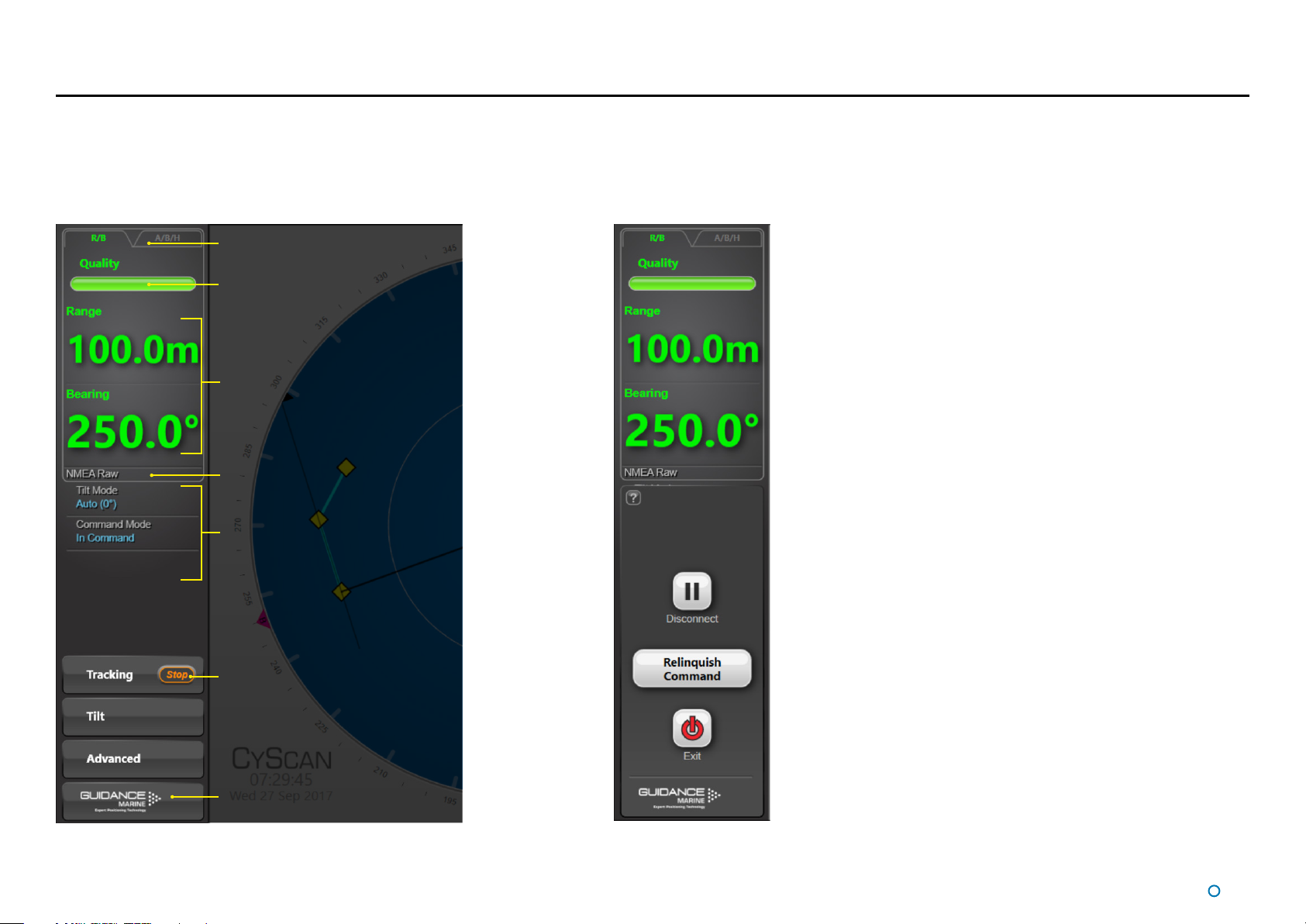
Screen Layout (Continued)
Hotkey Buttons
Selecting the Hotkeys tab on the right-hand side of the main
screen activates the Dashboard Hotkeys menu.
Hotkeys Tab
The following keys - and the corresponding buttons on the Dashboard Hotkeys menu act as shortcuts to application functions.
F1 Help Menu
F2 Rotates the vessel clockwise
F3 Rotates the vessel anti-clockwise
F4 Toggles between BEV and Coordinates Layout Mode
F5 Toggles between enlarged and standard-sized reflections
F6 Toggles between the day view and night view
F7 Toggles between the About System pane and the full main screen display
F10 Takes a snapshot of the screen and stores the image with the log data
F11 Toggles the on screen keyboard
Ctrl + Zoom-In
Ctrl - Zoom-Out
Esc When in operation confirmation mode, cancels the current operation request; in all
other modes, brings back the full BEV screen
Return When in operation confirmation mode, confirm the current operation request
15
l
Page 16
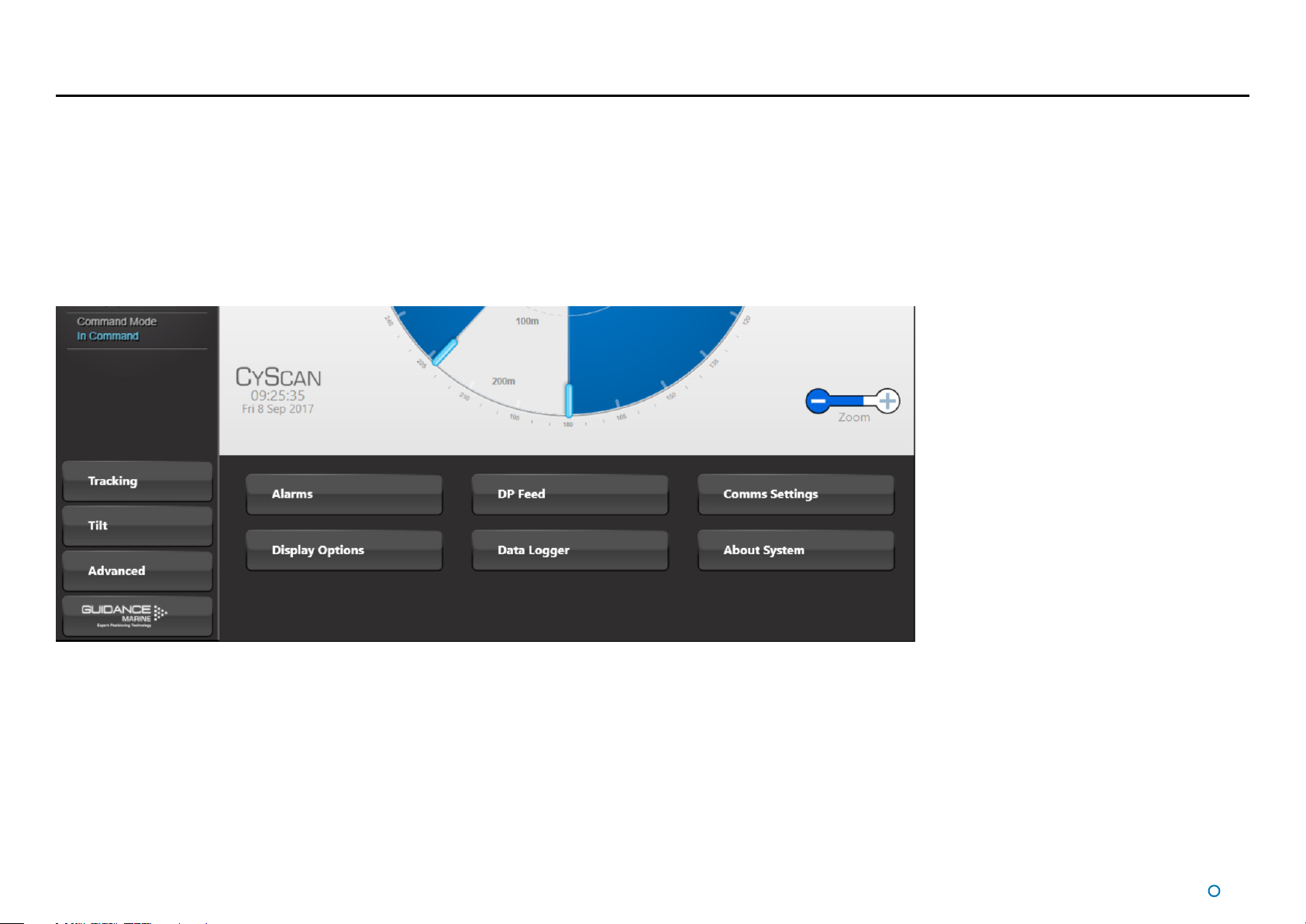
Screen Layout (Continued)
Menu Pane
The Menu Pane, located across the bottom of the CyScan Dashboard Screen, is not always visible. It appears when one of the
Tracking, Tilt or Advanced buttons near the foot of the Side Bar are pressed, which causes the Bird's Eye View (BEV) to contract
towards the top of the screen. Clicking the same button for a second time causes the Menu Pane to disappear and the BEV to be
restored to full size.
The Menu Pane is used to display a wide variety of information and controls, often accessed by further tabs and buttons that
become available once the Menu Pane is in place.
l
16
Page 17
Screen Layout (Continued)
Coordinates Layout Mode
Whilst tracking is in progress, the positional coordinates and the Bird’s Eye View can be
transposed, so that the coordinates are displayed in extra-large numerals on the main
screen, whilst a miniature BEV is shown at the top of the side bar.
If tracking ends, the layout automatically reverts to Bird’s Eye View. As long as Coordinates
View remains selected the main screen will again display coordinates once the next
tracking operation commences.
To Select Coordinates View
This can be done in a number of ways:
1. Navigate to Advanced > Display Options > Screen Layout.
•
2. Click on the Coordinates radio button.
Click on the numerical data near the top-left corner of the screen.
•
Press F4.
•
Click on Switch To Coordinates Layout Mode in the Dashboard Hotkeys menu.
•
l
17
Page 18
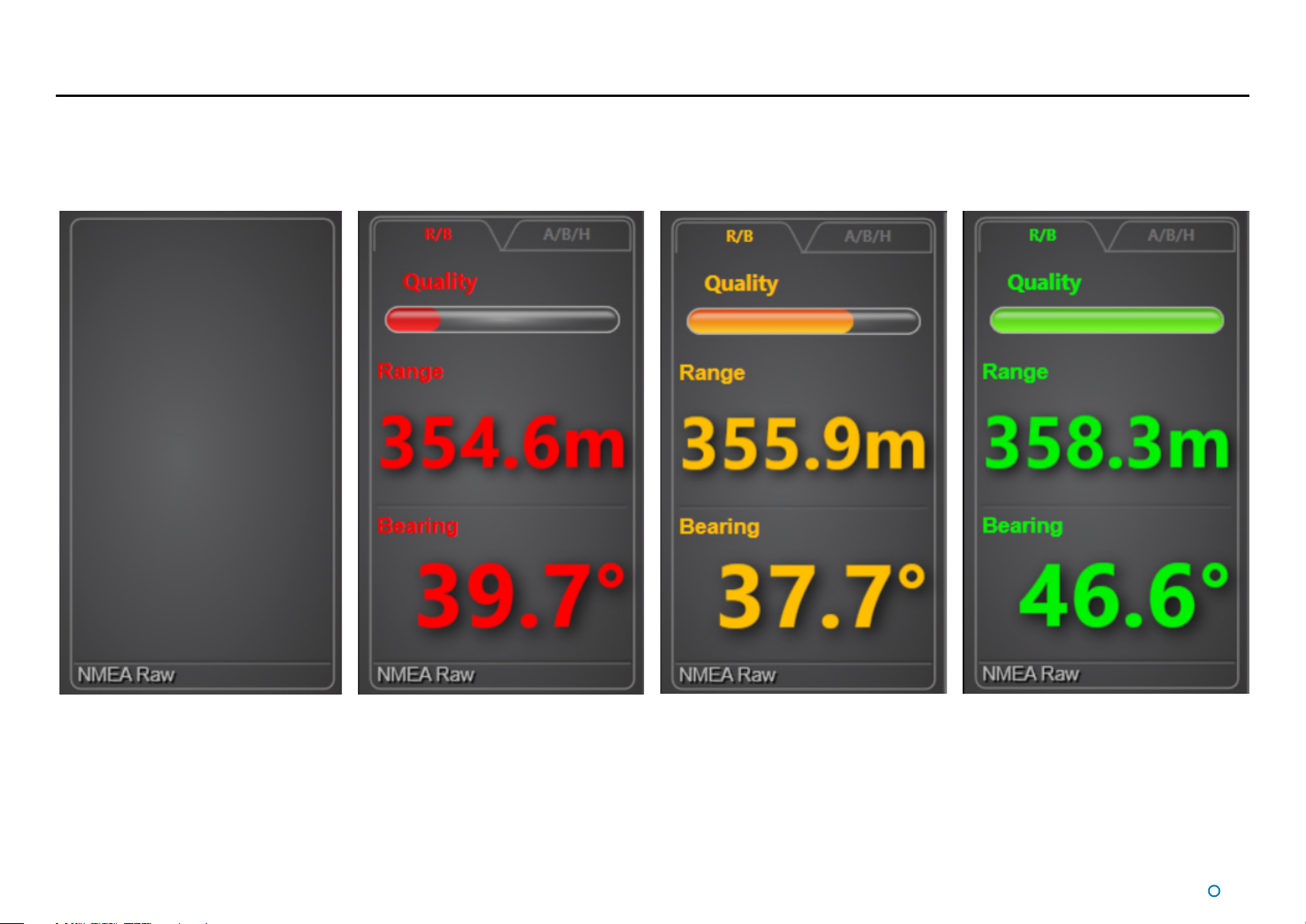
Tracking Information Quality
The CyScan AS Sensor rotates anti-clockwise. On each rotation, the sensor emits two beams of infrared laser light and analyses the position of any reflections that it receives.
After several rotations, the sensor is able to compare the reflections received on the last rotation with those received during previous rotations. This enables CyScan to recognise the
reflections from the intended targets and to ignore any unwanted reflections.
Before tracking has been selected, the Data Quality and Coordinates area in the upper left corner of the screen is empty. Once tracking is started a green quality bar indicates that
the system is reliably tracking the selected targets. Amber indicates a drop in performance (the operator's attention may be required when amber) and red indicates that the position
information is unacceptable for DP operations. This will lead to the system aborting the current tracking session and the operator will need to restart tracking.
l
18
Page 19
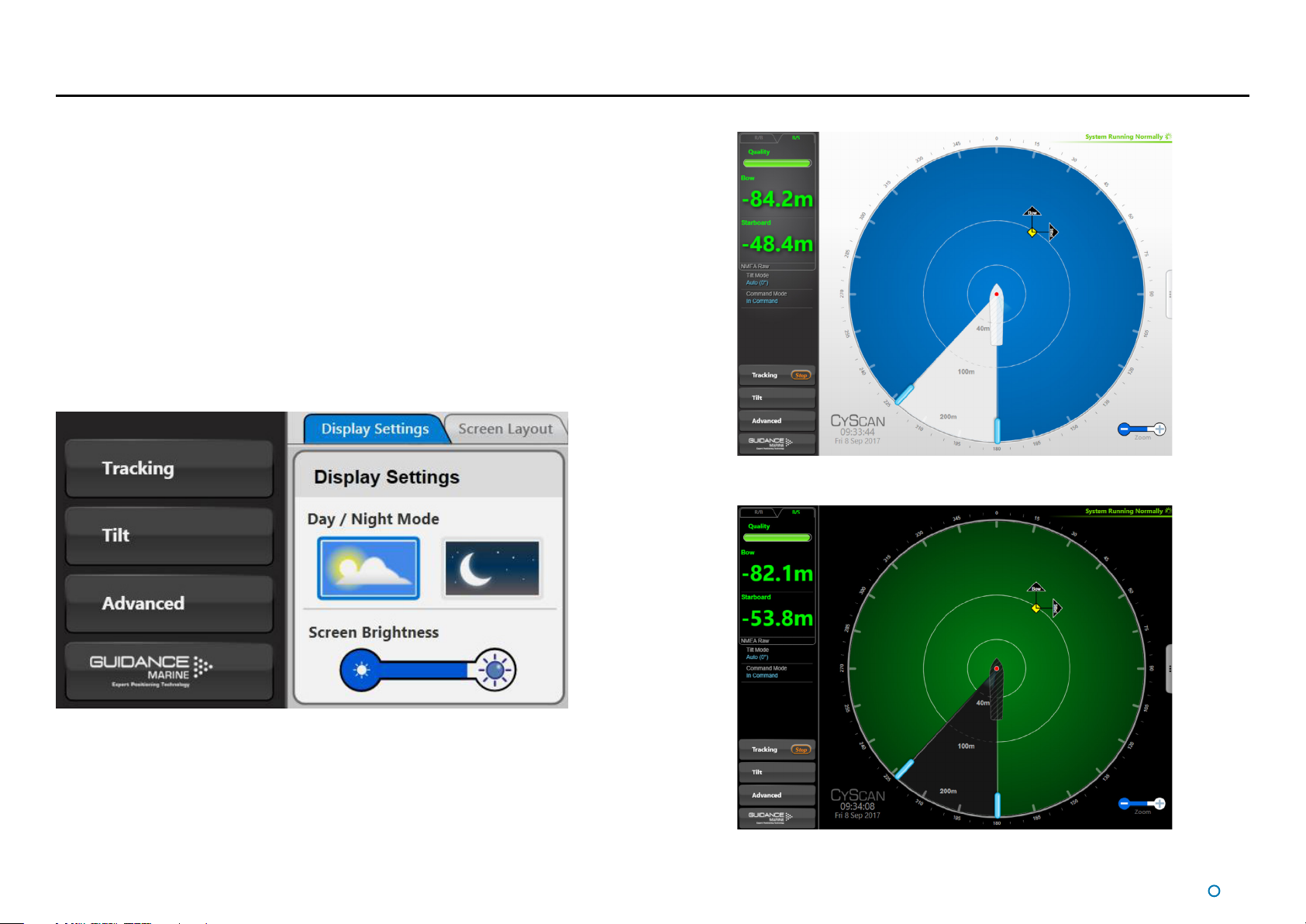
Display Settings
To provide ample visibility during daytime operation and to limit glare during night shifts,
CyScan Dashboard offers two display settings: Day Mode and Night Mode. In either mode
the brightness can be further adjusted by the Screen Brightness control.
To change day/night mode and adjust brightness:
1. Navigate to Advanced > Display Options > Display Settings.
2. Click on one of the Day / Night Mode symbols.
3. Click on the left side of the Screen Brightness control to dim the screen and on the
right to make it brighter.
Alternatively, to toggle between day and night mode, use the keyboard shortcut F6 or the
Toggle Day/Night Mode button in the Dashboard Hotkeys panel.
Day Mode
Night Mode
l
19
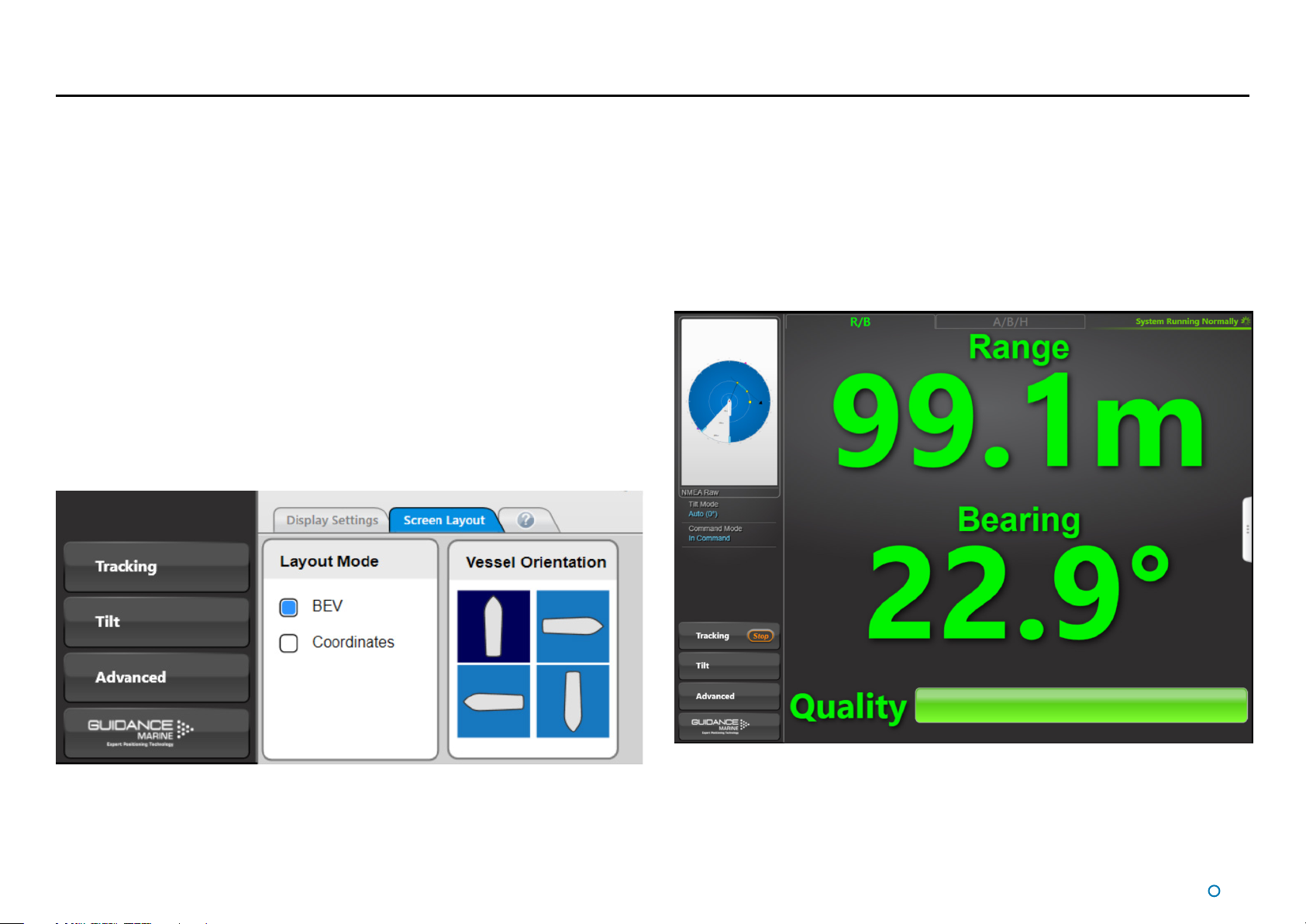
Page 20

Vessel Orientation
CyScan Dashboard supports four different layouts of the Bird’s Eye View so that the
operator can choose the one which best represents their surroundings.
For instance, if the operator is facing forward when using the Dashboard, they may want
the bow of the vessel in the BEV to point upwards, so that targets located on the starboard
side of the vessel are shown on the right-hand side of the BEV.
To set Vessel Orientation:
1. Navigate to Advanced > Display Options > Screen Layout.
2. Click on the vessel outline that points in the required direction.
l
20
Page 21

Tracking Basics
This section contains the following pages:
Dynamic blanking zones (page 22)
•
Working with Reflections (page 23)
•
Scanner Tilt Controls (page 25)
•
l
21
Page 22

Dynamic Blanking Zones
The Dynamic Blanking Zone is used to mask a segment of the scan rotation. When the
scanner passes through the dynamic blanking zone, the laser is switched off to prevent
any unwanted reflections from being mistaken as targets.
N.B. Even if the sensor has a clear 360° view, there must be a dynamic blanking zone of
at least 23°. The user interface will not allow smaller blanking zones.
Generally, once the dynamic blanking zone has been set, it will not need to be changed.
However, there may be occasions when it is necessary to adjust the dynamic blanking
zone, for example if the target is on the opposite side of the vessel to normal.
Note: Up to four additional static blanking zones can be configured from within the
CyScan Service Interface. These are typically used to mask vessel structure. (see 94-0559
CyScan AS Installers Guide).
Setting the Dynamic Blanking Zone
The start and end of the zone can be set to any positions around the circle to the nearest
degree, subject to the minimum and maximum sizes of the zone (see red box below).
To dene the Dynamic Blanking Zone
The Dashboard needs to be in command mode to make changes to the dynamic blanking
zone.
1. Click one of the dynamic blanking zone handles and, holding down the left mouse
button, drag to the desired position. Alternatively - on a touchscreen - touch and drag.
As the handle is moved, its current position (in degrees clockwise from the vessel bow)
is displayed in blue numerals outside the perimeter of the circle.
2. If required, drag the second zone handle in the same way.
3. The Apply-Cancel buttons will have popped up after step 1. Click on the Apply button
to set the dynamic blanking zone, or on Cancel to restore the dynamic blanking zone
to its previous state.
The dynamic blanking zone must cover at least 23° but no more than 337°. The user
interface will not allow larger blanking zones.
l
22
Page 23

Working with Reections
Basic Reections Data
Reflections data is displayed on two panes accessed via the Tracking Button. The
Reflections pane contains a list of reflections that are visible to the scanner, and the Range,
Bearing and Brightness level of each:
The user is able to filter out unwanted reflections (see following sections) and can choose
whether to include rejected reflections in the list by means of the Show / Hide Rejections
toggle button.
Range Filters
The Range Filters function on the Reflections pane allows the user to set minimum range.
Any reflection at a shorter range than the range threshold is not included in the list of
reflections nor displayed on the BEV. This mechanism is useful when unwanted reflections
cannot be eliminated by means of the dynamic blanking zone function alone. It can be
used at any time, even during tracking.
Note: The Dashboard needs to be in command mode to make any changes.
Filtering by Range
Allows the user to discard reflections that are closer than the threshold range. For example,
setting the range threshold to 35m will cause any reflections from less than 35m away to
be discarded. The range threshold can be adjusted between 5 and 70 metres by clicking
on the end of the filter bar marked '+' or '-' as required. A corresponding grey circle is
shown in the centre of the BEV.
Range Filter Bar Manual Power Control Bar
Power Control
Automatic power control should be sufficient for most operations, however there is the
option to take manual control. (see Power Control on page 43)
l
23
Page 24

Working with Reections (continued)
Extended Reection Data
The Reflection Pulses pane contains details about the number of pulses that make up each
reflection, and their angle of incidence.
Pulse - This column displays the number of laser pulses that have been received back
from each target.
In general, the larger the target the more pulses that will be returned.
This value will increase as the distance to the target reduces.
Width - The Width column shows the horizontal width of each target, measured in
degrees.
Lower, Middle and Upper - These columns indicate whether
the scanner is pointing low or high in relation to the detected reflections.
This can occur when the CyScan vessel is working close to a rig and the targets are
mounted high above the scanner (see
Manually Tilting the Scanner on page 26).
Rev # - The total number of revolutions made by the scanner rotor since CyScan was last
powered up or resumed.
Pulses - The total number of laser pulse returns received during the last revolution of the
scanner rotor.
Temperature - The temperature inside the scanner unit (see
Operation on page 53).
Low Temperature
l
24
Page 25

Scanner Tilt Controls
The scanner tilt mechanism automatically compensates for the pitch and roll of the vessel
caused by wave motion.
Motion sensors and a tilting optics mechanism ensure that the scanning optics remain at
the correct level to see the target.
Scanner Tilt Modes
The scanner can be operated in either of the following tilt modes:
Auto - The scanner tilt automatically adjusts to compensate for draught changes as
•
the vessel loads or unloads, and for gradual tidal movement. Also effective when the
elevation angle of targets increases as the vessel approaches a platform.
Manual - This mode is used to manually tilt the optics to reach the target. For
•
example, when station-keeping close to a platform where the targets are mounted
high up and the CyScan optics must be tilted up at them. (See
Scanner on page 26).
The current tilt mode and leveller angle are displayed in the ‘Tilt Mode:’ section of the Side
Bar.
To change the scanner tilt mode and leveller angle
Note: The Dashboard needs to be in command mode to make any changes.
Manually Tilting the
1. Click on the Tilt button in the Side Bar.
2. Select the required mode and click on the Apply button to confirm.
3. Click on the +/- buttons to adjust the angle. The adjacent list of estimated elevation
angles for visible targets helps you to arrive at the best leveller angle.
4. Click on the Apply button to confirm your changes.
Side Bar Tilt Mode Section
Tilt Mode Selection
l
25
Page 26

Scanner Tilt Controls (Continued)
Manually Tilting the Scanner
The Manual mode is used to tilt the scanner optics to a user-defined angle so that the
centre of the fanned beam is pointing at the target. This may be necessary when the
CyScan Vessel is close to a platform and the targets are positioned above the sensor.
Upper Channel
Middle Channel
Lower Channel
Beam Spread
The CyScan optical receiver is divided into three vertical channels: Lower, Middle and
Upper. The proportion of beam signal being received in each channel is used to determine
the correct angle to set the optics.
If one of the reflections in the list is selected, its elevation relative to the horizontal is shown
by the position of the yellow target symbol on the right-hand side of the Leveller Graphic.
The blue line represents the laser beam, and this moves as the +/- buttons are clicked.
When the laser line points to the centre of the target symbol, this indicates that the leveller
angle is ideal for the selected target
To change the scanner tilt mode and leveller angle
Note: The Dashboard needs to be in command mode to make any changes.
1. Click on the +/- buttons to adjust the angle. The adjacent list of estimated elevation
angles for visible targets helps you to arrive at the best leveller angle.
2. Click on the Apply button to confirm your changes.
Scanner tilted up and pointing at a target mounted higher than the sensor.
Spirit Level
The Spirit Level indicator, on the left hand side of the Tilt
pane, displays the roll and pitch of the vessel as measured
by the Vertical Reference Unit within CyScan. The graphical
display represents the roll and pitch angles in the same
manner as a bullseye spirit level. The current values are
displayed in text at the bottom of the control. A ship outline
is shown in the background to indicate orientation relative
to the vessel.
l
26
Page 27

Single and Multi-Target Tracking
This section explains the different types of target tracking that can be performed using the
CyScan Dashboard, and how to configure them. It does not provide advice on how to set
up a tracking operation for a specific DP system or application.
The information contained in this section is for general guidance only. This section does
not provide an exhaustive explanation of target tracking using CyScan, nor does it form
the basis of a contract. Implementation of the material covered in this section will vary
according to the type of DP system used in conjunction with the CyScan system. The use
of, or reliance on, anything in this section is therefore entirely at the user’s own risk and
should only be undertaken after assessment of its accuracy, completeness and suitability
for the proposed use.
This section contains the following pages:
Types of Target Symbols (page 28)
•
Introduction to Single and Multi-Target Tracking (page 29)
•
Positional Display Modes (page 31)
•
Selecting Targets for Multi-Target Tracking (page 33)
•
Aligning Multi-Target Heading (page 36)
•
l
27
Page 28

Types of Target Symbols
The CyScan system displays different symbols and colours for each type of target.
Laser Position Reference Sensors can detect all manner of reflector targets. Prisms, Tube
Targets as well as other reflective objects. This can lead to false targets being identified
from reflective objects located near the actual reflector. For example, a reflective jacket
worn by a worker being selected for tracking.
Guidance Marine have solved this problem by creating a patent pending Absolute
Signature (AS) technology. When a CyScan AS sensor is used in conjunction with an AS
prism, the system can uniquely identify the AS prism target from all the clutter of other
reflective objects in the scene. No other laser sensor can do this. AS prisms appear as
regular reflective objects to other types of sensor. For more information on how this works,
please see the CyScan AS Installers Guide.
Here are the symbols shown for each type of target:
Target Type Tracked Untracked Missing
AS Targets
Non-AS Targets
Untracked targets size is affected by the strength of the reflection. A weaker reflection will
appear smaller in the Dashboard. Conversely a tracked target will appear as a full size
symbol.
l
28
Page 29

Introduction to Single and Multi-Target Tracking
The CyScan system can track either a single target or multiple targets:
Single-Target Tracking
During Single-Target Tracking, only one target is used.
Single-Target Tracking is quick and easy to use, but has the following limitations:
Tracking stability is affected if the target reflection is temporarily lost,
•
as there is no redundancy.
If the true target reflection is obscured by vessel operations,
•
there is a possibility that the sensor track could jump to another reflection.
Relative vessel heading cannot be calculated.
•
Multi-Target Tracking
In Multi-Target Mode, CyScan uses two or more targets. Guidance Marine recommends
using a minimum of three targets. Multi-target tracking has the following advantages
compared to single-target tracking:
Improved tracking stability.
•
Increased immunity to false reflections.
•
Redundancy allows tracking to continue even if a target is temporarily lost.
•
Redundancy is only provided when 3 or more targets are selected.
The vessel’s heading in relation to the Multi-Target Group can be calculated.
•
Note: Multi-Target tracking assumes that all the reflectors are attached to the same rigid
body (e.g. rig). if the selected targets are not all mounted on the same structure it will
violate the rigid body assumption and tracking will be lost
For Multi-Target Mode
1. Ensure that the dashboard is In Command.
2. Locate a reflection on the BEV, or in the Reflections tab located in the Tracking Menu.
3. Select a minimum of two target reflection symbols (see Selecting Targets for MultiTarget Tracking on page 33). An ordinal number will be superimposed on each as they are
clicked. Reflections can be deselected by clicking on them again.
4. Click on the Apply button to confirm and begin tracking.
To Stop Tracking
Whilst tracking is in progress, a Stop button is embedded in the Tracking button on the
Side Bar.
1. Click on the Stop button.
2. Click on the Apply button to confirm.
To Start Tracking
For Single-Target Mode
1. Ensure that the dashboard is In Command mode.
2. Locate a reflection on the BEV, or in the Reflections tab located in the Tracking Menu.
3. Click on the required target reflection symbol. It changes to the selected state (diamond
shape with red dash around the outside and number “1” superimposed).
4. Click on the Apply button to confirm and begin tracking.
l
29
Page 30

Introduction to Single and Multi-Target Tracking (Continued)
Edit Tracking
Tracking can be altered without first stopping existing tracking. This is done to add
additional reflectors to the current multi-target mode.
To Track Additional Targets
1. Ensure that the dashboard is In Command, and that the Quality of the existing track is
at least 90%.
2. Locate a reflection on the BEV, or in the Reflections tab located in the Tracking
Menu.
3. Select the additional target reflection symbols (see Selecting Targets for Multi-Target
Tracking on page 33). A number will be superimposed on each as they are clicked.
These additional reflections can be deselected by clicking on them again. Reflections
already used for tracking cannot be deselected.
4. Click on the Apply button to confirm and begin tracking.
Notes on Edit Tracking
Single Target Tracking cannot be edited.
•
During the Edit process, the existing tracking will continue to work. Any Edits made by
•
the user can be cancelled by pressing Cancel.
We only allow additional targets to be tracked if the Quality of the existing track is
•
>= 90%. Targets cannot be removed from the existing track. These limitations are to
prevent jumps in the signal being sent to the DP feed. If the users wishes to alter the
set of tracked targets in this manner, they must first Stop Tracking.
Lost Tracking
The CyScan sensor is capable of tracking targets even when they are momentarily
obscured from view, or drift slightly in position. Missing targets will appear as red symbols.
DP Feeds that issue a separate DP telegram for each target will not emit a valid telegram
for missing targets.
If all tracked targets are lost for a period of time, then the CyScan sensor will be unable to
continue tracking. The dashboard will report this with an warning:
Once this state is reached, tracking will have ceased, and no DP feeds will be updated.
The operator will need to Stop Tracking, and select a new set of targets.
l
30
Page 31

Positional Display Modes
The relative positions of the CyScan vessel and single or multiple targets can be expressed
either as Range and Bearing values, or as 'x' and 'y' positions on a rectangular coordinate
frame.
During Single-Target Tracking the position of the tracked target can be displayed as either
Range/Bearing or Bow/Starboard. For Multi-Target Tracking the position of the tracked
targets can be displayed as Range/Bearing or A/B/Heading (see definition of A/B axes on
page 32).
Users can select the required mode by clicking the appropriate tab above the Data Quality
area:
Range & Bearing
Range and Bearing mode displays the distance and the bearing of the primary (or only)
target from the sensor. The radial markers around the outside of the BEV are zeroed in line
with the vessel bow and a magenta tag marks the bearing which is the angle of the target
clockwise from the bow.
In the case of multi-target tracking, there is also a heading axis. This always passes
through the primary target and it points through the secondary target. A purple tag
represents the heading, which is the angle of the vessel bow clockwise from the heading
axis.
l
31
Page 32

Positional Display Modes (Continued)
Bow and Starboard Axes
This mode is available for single-target tracking.
In this mode, the position of the sensor vessel is expressed in metres from the target
along Bow (B) and Starboard (S) axes which have their origin at the target. The B and S
coordinate axes are always parallel with the vessel's own axes.
Bow and Starboard Axes
A and B Axes (A Pos and B Pos)
This mode is available for multi-target tracking.
In this mode, the position of the sensor vessel is expressed in metres from the target
along A and B axes which have their origin at the primary target.
The axes are initially aligned with the multi-target group, with the A axis passing through
the secondary target. The vessel's relative heading is measured clockwise from the A
axis.
The radial markers around the outside of the BEV are zeroed in the same direction as the
A axis, which acts as the heading axis. The purple heading tag is aligned with the vessel
bow, at the point on the scale that shows the angle of the bow clockwise from the A axis.
A and B Axes
l
32
Page 33

Selecting Targets for Multi-Target Tracking
Selecting Reections
When you select a reflection as a target, make sure that it corresponds to the actual target
that you wish to track against. You can select up to 9 reflections to form a multi-target
group.
The first reflection that you select (target 1) becomes the primary target, which forms the
origin of the A and B coordinate axes.
The second reflection that you select (target 2) sets the default orientation of the A and B
coordinate axes.
A further 7 reflections can be added can be added to give redundancy to the group if
targets 1 or 2 are temporarily lost or obscured.
If more targets are mounted on the rig, then the superfluous ones should be physically
removed and not just omitted from the multi-target group.
l
33
Page 34

Selecting Targets for Multi-Target Tracking (Continued)
Target Selection Order
e
Any additional targets (targets
3-9) will provide additional
redundancy to the tracking
q
The first target selected
(the primary) becomes the
origin of the coordinate axes.
Axis B is always 90°
clockwise to Axis A.
w
The second target
selected (the secondary)
sets the default direction
of the A axis.
Axis A runs from
the primary target
to the secondary.
l
34
Page 35

Selecting Targets for Multi-Target Tracking (Continued)
Target Selection Order and Coordinate Axes Direction
The A and B coordinate axes point in different directions according to the order in which
targets 1 and 2 are selected.
By default, axis A runs from target 1 to target 2, and axis B is always drawn 90° clockwise
from axis A.
B
Target 1 Target 2
B
Target 1 on Left
Axis A runs from left to right.
•
Axis B points towards the CyScan vessel.
•
The left-most reflection is selected as target 1 and the
right-most reflection as target 2.
Axis A runs from left to right on the display.
Axis B is drawn 90° clockwise from axis A, and points
towards the CyScan vessel on the display.
Vessel
A
Target
Reflective
Surface
A
Target 2
Vessel
Target 1 on Right
Axis A runs from right to left.
•
Axis B points away from the CyScan vessel.
•
The right-most reflection is selected as target 1 and the
left-most reflection as target 2.
Axis A runs from right to left on the display.
Axis B is drawn 90° clockwise from axis A, and points
away from the CyScan vessel on the display.
Target 1
Key
l
35
Page 36

Aligning Multi-Target Heading
This functionality is for use if you require the CyScan AS system to produce a new heading
based on a known reference heading rather than on the orientation of the primary and
secondary targets.
WARNING: You must deselect the CyScan AS sensor at the DP console BEFORE
commencing this operation.
Note: This operation is only available when multi-target tracking using DP formats NMEA
Raw or NMEA Primary. The Dashboard should also have A/B/H selected in order that you
can see the effect of your changes.
• Navigate to Advanced > Align Heading
• Key the required heading value into the numerical entry box and click Preview.
• Alternatively, move the red compass needle to the required position, either by clicking
and dragging it or by repeatedly clicking the small +/- buttons.
• Press Apply (on the Apply-Cancel pop-up) to confirm.
When you align the multi-target heading, the A and B axes orientation and position
coordinates are recalculated so that they correspond with the new heading value.
The heading and position coordinate data sent to the DP system will change suddenly
when you confirm the new alignment.
l
36
Page 37

Multi-Dashboard (Ethernet) CyScan Systems
This section contains the following pages:
CyScan Ethernet Dashboard - Monitoring Mode (page 38)
•
CyScan Ethernet Dashboard - In Command Mode (see page 39)
•
Note that a CyScan system running with Serial communications supports only a single
Dashboard, and whenever this is running and connected to the sensor, it is effectively in
command mode.
l
37
Page 38

CyScan Ethernet Dashboard - Monitoring Mode
CyScan, when configured to run with Ethernet communications, supports multiple
Dashboards running simultaneously on the same system. No more than one of these can
be In Command mode at any given time; the others are in Monitoring mode.
When the Dashboard is running in Monitoring mode, the controls relating to the Dashboard
itself will be active, but those relating to the CyScan sensor will be disabled. A Monitoring
Dashboard displays the same reflections and positional data as the In Command
Dashboard. It cannot initiate or stop tracking operations, alter the power control, reflection
filtering or tilt settings.
Examples of inactive controls in Monitoring Mode
To switch a Dashboard from In Command mode to Monitoring mode:
1. Click on the Guidance button.
2. Click on the Relinquish Command button.
l
38
Page 39

CyScan Ethernet Dashboard - In Command Mode
When the CyScan Dashboard is running in Command mode all control functions are
available. Any changes made to the tracking or sensor-related settings at the In Command
Dashboard will be visible on the screens of the Monitoring Dashboards. On the other hand,
display options such as Screen Brightness or Zoom level can be set differently on each
individual Dashboard, whether it is Monitoring or In Command.
When the In Command Dashboard is used to suspend the CyScan sensor, a message
will appear on the screens of the Monitoring Dashboards indicating that the system is
suspended. The same message is displayed if a Dashboard is opened whilst the sensor is
suspended (See
In this state, clicking the Resume button on any Dashboard will automatically put that
Dashboard In Command. Clicking Exit will close that individual Dashboard only.
Whenever the system is running, a Monitoring Dashboard can be promoted to In
Command as shown on the right.
Start Up and Shut Down on page 10).
Examples of controls available only In Command mode
To switch a Dashboard from Monitoring mode to In Command mode:
1. Click the Guidance button.
2. Click on the Take Command button.
The dashboard will start in
Monitoring mode if there is
already an In command client
connected to the system.
Command of the system can
be taken by pressing the Take
Command button.
l
39
Page 40

Support Information
This section contains the following pages:
Serial Numbers and Software Versions (page 41)
•
DP Feed (page 42)
•
Manual Power Control (page 43)
•
Ethernet Sensor Data Logging (page 44)
•
Serial Sensor Data Logging (page 45)
•
l
40
Page 41

Serial Numbers and Software Versions
These numbers identify the hardware configuration and product revision and will be
requested by Guidance Marine in the event of an application service or support call to the
company.
Product Label
The Part Number and Serial Number can be found on the product label affixed to each
unit.
Software Version Information
The About System pane provides version information about the Dashboard and the
software components within the CyScan sensor. It also contains the serial number of the
sensor.
To Display the About System Pane
1. Click on the Advanced button.
2. Click on the About System button.
CyScan sensor
part number
CyScan sensor
serial number
l
41
Page 42

DP Feed
The DP Feed is the data that CyScan transmits to the vessel’s Dynamic Positioning
system. CyScan supports several different data message formats and it is important that
CyScan and the DP system are both configured to use matching formats. However, this
cannot be done from the Dashboard; in order to change the CyScan DP settings, use the
CyScan Service Interface (see document 94-0559 CyScan AS Installer's Guide, which
also contains descriptions of the available DP message formats).
The state of the sensor’s DP output channel, the message format used and the most
recent data output can be viewed on the Dashboard.
To View DP Feed Details:
1. Click on the Advanced button on the side bar.
2. Click on the DP Feed button on the menu pane.
l
42
Page 43

Manual Power Control
Note: The Dashboard needs to be In command mode to make any changes.
Manual Power Control can be used to switch off the normal automatic power control for
the rotor on the CyScan Sensor and to apply and adjust a fixed constant power instead.
To Enable Manual Power Control:
1. Click on the Tracking button on the side bar.
2. Click on the Reflections tab, if not already in focus.
3. Click on the Manual Control tick box, in the Power Control panel.
To Use Manual Power Control:
1. Adjust the power level by clicking on the left or right hand side of the control until the
required value is displayed.
2. Click on the Apply button to confirm the changes.
To Disable Manual Power Control:
Click on the Manual Control tick box and on the Apply button to confirm.
The tick box will clear and the Power Level control will be removed.
l
43
Page 44

Ethernet Sensor Data Logging
This is for Ethernet connected sensor Data Logging only.
The system automatically generates a set of operation logs that can be analysed by a
service engineer to diagnose any system faults. It generates these at all times.
Logs can be e-mailed to Guidance Marine Limited (customerservices@guidance.
eu.com) or to your DP Supplier in the event of a problem.
Exporting Data Logs
The most recent data logs can
be exported to a removable
drive on the Dashboard
computer.
To Export Data Logs
1. Insert a USB or other
removable drive into the
Dashboard computer.
2. Navigate to Advanced > Data Logger.
3. Select the period for which you wish to export logs (Last Hour, Last 4 Hours, etc).
4. Select destination drive from the drop-down list, if not already displayed (click on the
Refresh button to refresh the list of available USB drives).
5. Click on Export Data Logs.
Either before or during the export operation, the Refresh button can be used to update the
Available Space field.
Taking Screenshots
The Screenshot option records every detail of
the current screen and stores it as a bitmap
image. Screenshots can be analysed by a
service engineer or e-mailed to Guidance Marine
Limited in the same way as log files.
Screenshots are stored with the data logs and
are included when data logs are exported.
To Take a Screenshot:
There are two alternative ways:
1. Click on the Hotkeys tab.
•
2. Click on Grab Screenshot.
Press the F10 key.
•
Extended Data Logging
When the Log Extended Data box is ticked, extra
information will be included in all data logs that
are recorded. This may be useful as a short-term
measure for diagnosing a particular problem,
but in general the box should be left un-ticked in
order to conserve disk space.
To Enable Extended Data Logging:
1. Navigate to Advanced > Data Logger.
•
2. Tick the Log Extended Data box.
The Grab Screenshot Button
l
44
Page 45

Serial Sensor Data Logging
This is for Serial connected sensor Data Logging only.
The system automatically generates a set of operation logs that can be analysed by a
service engineer to diagnose any system faults. It generates these at all times.
Logs can be e-mailed to Guidance Marine Limited (customerservices@guidance.
eu.com) or to your DP Supplier in the event of a problem.
Exporting Data Logs
The most recent data logs can
be exported to a removable
drive on the Dashboard
computer.
To Export Data Logs
1. Insert a USB or other
removable drive into the
Dashboard computer.
2. Navigate to Advanced > Data Logger.
3. Select the period for which you wish to export logs (Last Hour, Last 4 Hours, etc).
4. Select destination drive from the drop-down list, if not already displayed (click on the
Refresh button to refresh the list of available USB drives).
5. Click on Export Data Logs.
Either before or during the export operation, the Refresh button can be used to update the
Available Space field.
Alternative Export Methods
Exporting data logs from a Serial sensor can take a long time, depending on the selected
time period and the size of the data logs. After clicking the Export Data Logs button, the
dashboard will display (within a minute) an estimated time of how long the process will
take.
If the estimated time is too long for you to wait, then we advise changing the sensor
configuration from Serial to an Ethernet connection and then restart the steps again. This
will decrease the exporting time significantly.
Note: the debug logs, event log, service history, and the active unzipped log files, are not
exported on a Serial sensor.
Please see 94-0559 CyScan AS Installers Guide on how to reconfigure the sensor to an
Ethernet sensor configuration.
l
45
Page 46

Troubleshooting
If you experience problems when installing or using the CyScan system, please check
through this Troubleshooting section for a possible solution. It contains the following pages:
Problems and Possible Remedies (page 47)
•
Cleaning the Sensor and Targets (page 48)
•
CyScan Fuse Information (page 49)
•
If your problem is not listed or you cannot resolve the issue, please contact the system
installer or equipment provider who are trained to assist with installation and operational
problems.
If the problem cannot be resolved by the system installer or equipment provider, please
contact Guidance Marine Limited:
Contact Details
UK Support: +44 116 229 2665
(365 days a year, 08:00 - 20:00 hours UTC)
customerservices.uk@guidance.eu.com
USA Support: +1 504 305-1120
customerservices.us@guidance.eu.com
Asia Support: +65 6734 6365
customerservices.sg@guidance.eu.com
Web: www.guidance.eu.com/customer-support
l
46
Page 47

Problems and Possible Remedies
No communication between CyScan Dashboard and the Sensor
The Dashboard screen turns grey, the Primary Status Display reads “Communications
•
ERROR” and the Secondary reads “Unable to communicate with the sensor”. Click the
Disconnect button then the Connect button.
Check the power and client connections to the sensor.
•
Check that the unit is displaying the current time on the sensor information display. If it
•
is showing any errors then power cycle the sensor.
Check that the data feed converter is powered (yellow LED on) and that the outer
•
transmit/receive lights are flashing once every couple of seconds (i.e. the Dashboard is
trying to establish communications with the sensor unit). Under normal conditions the
outer LEDs should flash first followed by the inner two LEDs flashing in response (the
sensor unit answering with data).
Rotor does not rotate
Check the temperature of the unit is above -15°C degrees. Below this the rotor is
•
prevented from spinning to protect the sensor mechanics.
Check that the Dashboard is not showing a ‘Motor Stall’ alarm, if so suspend and then
•
resume the unit to restart the motor.
The sensor rotor might be prevented from rotating due to mechanical
•
blockage. Investigate and remove blockage.
Check the sensor information display on the system unit. Ensure that there are no
•
errors displayed. Otherwise power cycle the unit and observe the messages on the
display.
Check for ice build up under the rotor. Remove any ice which may be present.
•
System appears to be operational but no reections are displayed within
CyScan Dashboard
Check that the dynamic and static blanking zones are configured correctly.
•
Clean the CyScan sensor window. (See Cleaning the Sensor and Targets on
•
page 48).
Check whether there are any reflections listed on the Reflections menu and that
•
the Zoom control on the main screen is set appropriately.
Check that the Tilt controls are set appropriately.
•
Check that the Power controls on the Reflections menu are set appropriately.
•
Check that the Range Filters on the Reflections menu are set appropriately.
•
System is operational but is not tracking
Check that the sensor has a clear view of the targets.
•
Check that the blanking zones are not blocking targets from view.
•
In the case of Multi-Target tracking, check that a suitable set of targets has been
•
selected (see
System tracking but no data is received at the DP system
Check the DP Feed connection from the sensor.
•
Check that the DP Message Format matches the configuration of the vessel’s DP
•
system.
System operates correctly but in cold weather loses targets.
Check for condensation or ice on targets. Clean if necessary.
•
Check for condensation or ice on the window of the sensor. Clean if necessary.
•
Selecting Targets for Multi-Target Tracking on page 33).
l
47
Page 48

Cleaning the Sensor and Targets
To maintain the CyScan Sensor in good working order it is important that its optical
elements are kept free of contamination.
To clean the optical window
Use a lint-free cloth with IPA spray to carefully wipe the optical window. If the material on
the window is difficult to remove, warm soapy water with a non-abrasive cloth may be
used to clear the window.
To clean the targets
In dirty environments the reflective faces of the targets should be cleaned regularly for best
viewing.
Under icy or frosty conditions, the targets should be cleared of any condensation or ice.
l
48
Page 49

CyScan Fuse Information
The CyScan system contains two replaceable fuses, one for the Live and the other for the
Neutral. These are located on the connector board as shown below.
Connector Board Fuse
Please refer to the Installer’s Guide for details on how
to access the connector board.
To remove a fuse from its housing, fit a flat-head screwdriver into
the slot in the insert - then push it in and turn it anti-clockwise until
the insert releases and can be pulled out.
Reverse the above procedure to replace the fuse.
Both fuses have the same specification.
Ensure the replacement fuse has the same specification as the
original fuse.
The fuses should be 20mm anti-surge glass fuses rated for 250V.
The current rating should be determined by the table below.
Voltage Supply 230v 110v
Normal Operation 630mA 630mA
Live
Neutral
Low temperature operation 1A 2A
Normal operation is where the sensor is operated at -10°C or
above.
Operating at below this temperature we have additional internal
heaters which warm the unit at start-up
CAUTION: DOUBLE POLE/NEUTRAL FUSING
l
49
Page 50

Additional Information
This section contains the following pages:
Target Types (page 51)
•
Targets-Installation and Position (page 52)
•
Low Temperature Operation (page 53)
•
Using the On Screen Keyboard (page 54)
•
Working with Alarms (page 55)
•
Network Communication Settings (page 57)
•
CyScan System Specifications (page 58)
•
Index (page 59)
•
Document History (page 61)
•
l
50
Page 51

Target Types
CyScan can operate successfully with flat, cylindrical or prism targets. These can be
bought online from www.marine.direct.
Cylindrical Targets
Cylindrical targets can be used up to
approximately 300 metres. They can be hung
over the side of the structure/vessel and secured
at either end.
Part number: 20-0078-0-B
(1.9m cylindrical reflector)
Prism Targets
Prism clusters with multiple 6cm elements
for extended range operations. Variable
configurations allow for optimisation of the
visible reflection, visible reflection level or
reflected power. A fixed layout rugged version
includes a robust housing, brightly-coloured
for easy identification.
Part number: 20-0197-2
Absolute Signature Prism
AS Prism with multiple 6cm elements for
extended range operations. A fixed layout
AS Prism includes a robust housing, brightlycoloured for easy identification. The AS prism
has a black tinted lens filter which gives it a
unique signature that the CyScan AS sensor can
exclusively identify as the AS prism target.
Part number: 20-0232-3
51
l
Page 52

45
o
45
o
VIEWABLE
ANGLE
VIEWABLE
ANGLE
0
Targets-Installation and Position
Target Installation
Key to the operation of the CyScan system is the correct installation of targets. Please follow
the guidelines given below when installing targets on the structure/vessel.
Once the targets are installed, their relative positions can be automatically surveyed by the
system.
Installation Tips
The targets should ideally be mounted at the same height as the sensor while the
•
vessel is within the expected working area. Consider vertical position as well as
horizontal.
Cylindrical targets can be viewed from any angle equally well.
•
Optimum Spacing for Multiple Targets
Targets should be placed no closer than 5m together. Ideally they should be placed
•
10m or more apart.
52
l
Page 53

Low Temperature Operation
Introduction
The CyScan sensor is a precision electromechanical device with hardware components
that, of necessity, are mounted in an external position on a vessel’s superstructure. It is
recognised that industrial marine operations may subject these components to harsh
environments, including low temperature.
The CyScan hardware complies with the requirements of IEC 60068-2-1 and is able to
operate for prolonged periods at temperatures down to – 25°C provided that certain
operating conditions are maintained.
If there is a requirement for CyScan to operate at temperatures below -25°C, contact
Guidance Marine.
Operating Conditions
The following recommendations are made for low temperature use:
If it is necessary for the system to be switched on after a prolonged period at
•
temperatures below 5°C (and down to – 25°C) the sensor will warm itself, but will
require some time to reach optimum operating condition.
If the unit is switched on after a period at temperatures between -15 to -25°C it will
•
not communicate with the Dashboard, the VFD will remain blank and the rotor will not
rotate until the internal temperature of the base unit rises above -15°C.
When the system is not in use (i.e. un-powered or suspended) the sensor should
•
be protected by means of a suitable insulating and protective cover to prevent the
external build-up of ice.
For operation below – 25°C additional forced air heating must
be provided. Do not use exhaust emissions as these contain
particulates which will degrade the optics.
Technical Considerations
The CyScan sensor uses a sophisticated rotating infrared laser range-finder to
•
accurately measure the distance and bearing to retro-reflective targets that are placed
at specific locations in the working area. Movement sensors allow mechanically driven
optics to compensate for vessel motion due to wave action. The internal mechanism
may become disabled if it is allowed to cool in a low temperature environment.
A safety interlock prevents activation of the range-finder laser if the scanner rotor head
•
stops or is prevented from rotating by ice build-up.
View of the retro-reflective targets will be obscured by a build-up of ice on either the
•
optical window of the scanner or the surface of the targets (N.B. ice has poor reflective
properties at the infra-red frequency used by CyScan).
l
53
Page 54

Using the On Screen Keyboard
In order to accommodate systems without keyboards, CyScan Dashboard provides an
onscreen Keyboard (OSK) option. This enables text to be input using only a mouse pointer
or touch screen.
To enable the on-screen keyboard
If, during installation, you indicated that the Dashboard would be used with a touch screen,
the OSK will already be enabled.
Otherwise, click F11 or the Enable On Screen Keyboard button in the Dashboard
Hotkeys menu.
To use the on-screen keyboard
Simply click on any text entry field and the OSK will pop-up ready for use:
In the case of a numerical field, the OSK is restricted to the appropriate keys:
When you have finished using the OSK, proceed to the next relevant action (e.g. clicking
on the Apply button), or else click on a different part of the screen, and the OSK will
disappear.
Click on the necessary keys on the on-screen keyboard using your mouse or by tapping
the touch screen.
l
54
Page 55

Working with Alarms
During operation, the CyScan system produces an audit trail of event messages. These
range in increasing order of severity from: Information, Warning, and Error to Fatal. As
these alarms are raised, the Dashboard lists them within the Alarms pane.
Click on any alarm to display details about it in the right-hand section of the Alarm pane:
The severity and current state of an alarm are reflected in its colour and shape:
Information—grey symbols
•
Warning—orange symbols
•
Error—red symbols
•
Fatal—red symbols
•
The arrowhead symbol indicates that an alarm condition is persisting aka Active alarms;
an alarm in this state will show a Start time but not a Stop time.
The square symbol means that the alarm condition no longer exists aka Stopped alarms,
therefore the alarm will show both Start and Stop times.
The pause symbol indicates an instantaneous alarm. In this case, the Start and Stop times
are identical.
When an Error or Fatal alarm is raised, the Alarms pane is opened automatically and the
Advanced button in the side bar is shaded red as in the example above. If the pane is
closed, the Advanced button returns to its normal grey shading.
Additionally, after a Fatal alarm has been raised, close the Dashboard, power down the
sensor and restart the system especially error and fatal alarms, to click on the alarm and
act on the details where necessary, e.g. reconnect/reboot, contact support, etc.
Filtering Alarms
A filter is available to suppress the display of particular alarm by severity. By default, the
filter is activated and causes information messages to be hidden.
Click on the Alarm Filter button to toggle between activated
Click on the Filter Selection button to choose which types of alarm are to be filtered out:
Alarm types that are ticked are always displayed in the alarms list, un-ticked types are
hidden when the filter is activated.
and de-activated .
l
55
Page 56

Using the Current and Historic Alarms Lists
Using the Historic Alarm List
The Alarms tab has two alarms lists:
The Current Alarms List displays new alarms (since the last start of the Dashboard
•
software).
The Historic Alarms List is used to store alarms that have been cleared from the
•
current list.
Current alarms are automatically transferred to the Historic alarms list when the Dashboard
is closed.
Items in the Current List cannot be deleted, they may only be moved to the Historic List.
Only items in the Historic List can be permanently deleted.
To accept alarms in the current list
1. Navigate to Advanced > Alarms and ensure that the Current Alarms tab is in focus.
2. Select the alarms that you wish to move into the Historic list:
To accept one alarm—Click on the required entry and click on the
To accept all alarms—Click on the
Note: This will not apply to alarms that have been hidden by the lter mechanism.
button and click Apply to confirm.
button.
To clear the historic list
1. Navigate to Advanced > Alarms and ensure that the Historic Alarms tab is in focus.
2. Select the alarms to delete:
To delete one alarm – click on the alarm entry and then on the
To delete all alarms – click on the
Note: This will not apply to alarms that have been hidden by the lter mechanism.
button and click Apply to confirm.
button.
l
56
Page 57

Network Communications Settings
The Comms Settings menu pane displays the configuration of communications between
the Dashboard and sensor. This menu only changes the local dashboard record of the
sensor IP address. Changing the sensor's IP address (stored in the connect.ini file) is NOT
possible from the dashboard but IS possible from the CSI Network Config tab 'Sensor
on-board network configuration' section. (see document 94-0363-4 CyScan Installer's
Guide).
To View the Network Comms Settings:
1. Click on the Advanced button on the sidebar.
2. Click on the Comms Settings button on the menu pane.
To Modify the Dashboard’s Record of the Sensor’s IP Address:
1. Navigate to Advanced > Comms Settings.
2. Click on the Edit button.
3. Modify the IP Address field as required.
4. Click on Apply to confirm.
Ethernet Communications Serial Communications
l
57
Page 58

CyScan AS System Specications
Sensor
Laser Source Pulsed laser diodes
Laser Classification Class 1M
Operating Range (nominal) 10 - 2500m (dependent on target size and atmospheric
conditions)
Range Resolution 0.01m (DP feed dependent)
Range Noise: 50mm*
Bearing Noise: 0.2 mrad
Beam Shape
Total Vertical Coverage
Wave Motion Compensation
Maximum Detectable Targets 30
Maximum Trackable Targets 9
Levelling Opcs
Active Axis Single axis with automatic dynamic stepper control
Tilt Compensation -20° to +20° roll and pitch (combined)
Sensors 3 axis solid state gyros and accelerometers,
Total Vertical Angular Coverage 52° (mechanical + optical)
Wave Motion Compensation (typical) ±5° for 5 second wave period
Environmental
Operating Temperature Range Min: -25°C Max: 55°C
Ingress Protection Rating IP66 rated
Standards Compliance EN60945, IEC60825
EMC Certification CE Certified, FCC Part 15(a)
12° vertical, 0.13° horizontal
52°
Single axis gimbal, +/- 20° absolute range
2 axis inclinometer
Vessel Interface
Sensor Power 85 - 264 VAC, max 130W
Sensor Control Electrical Interface Ethernet100Base-T or Serial RS422
Sensor Control Software Up to 10 simultaneous consoles (Ethernet) . Single control
console for serial connected sensors.
Sensor DP Feed 2x RS422 (Ethernet controlled sensors) or 1xRS422 (Serial
connected sensor)
Supported DP Telegram Formats NMEA0183R NMEA0183P, ASCII17, MDL standard, MDL
Multi-Target, Nautonix Standard, Kongsberg
Custom DP telegrams Kongsberg BCD, Artemis Mk IV, Marine Technologies, Rolls
Royce
Sensor Weight &Dimensions
Width 405mm
Depth 407mm
Height 565mm
Weight 28kg
Flight Case
System Dimensions 680 x 570 x 910 mm
System Weight ca. 78kg (typical accessories)
Targets
See page 51
*Measured at 200m on a cylinder target
l
58
Page 59

Index
A
A and B Axes 32, 33, 34, 35
Absolute Signature 28
Absolute Signature Prism 50
Absolute Signature Target 28
Access Plate 8
Alarms 54
A Pos 32, 33, 34, 35
Axis Orientation 34
Examples 37
B
Base Plate 8
Bird's Eye View (BEV) 12
Dynamic blanking zone 12, 22, 46
Bow and Starboard Axes 32
B Pos 32, 33, 34, 35
C
Cleaning 47
Contact Details 45
Guidance Marine 45
Command Mode 10, 23, 29, 41
Coordinate Axes Direction 35
Cylindrical Targets 50
CyScan Sensor Part Names 8
DP Feed 8, 30, 41
E
E-mail 43
Data Logs 43
F
Fuse Information 48
H
Hotkeys 15
L
Labels 40
Low Temperature Operation 52
M
Manually Tilting the Scanner 26
Manual Power Control 42
Monitoring Mode 37
Multiple Target Spacing 51
Multi-Target Tracking 29, 30, 33, 34, 35
N
Non-AS Target 28
Network Communication Settings 56
P
Part Number
CyScan Sensor 40
Part Numbers
Cylindrical Target 50
Prisms 50
AS Prisms 50
Phone 45
Positional
Information Quality 18
Positional Display Modes 29
Power 8, 23, 46
Prism
Targets 50
Problems and Possible Remedies 46
Product Labels 40
R
Range & Bearing 31
Reection 13, 23
Resume 38
Rotor 8, 10, 12, 24, 42
D
Dashboard 7, 11
Day Night Mode 19
Display Settings 19
Data Logging
Ethernet 43
Serial 44
O
On Screen Keyboard 53
Operating
Conditions 52
Optical Window 8
l
59
Page 60

Index (continued)
S
Scanner Tilt
Controls 25
Screen Layout 11, 12
Selecting Reections 13, 33
Selecting Targets 13, 33
Sensor Part Names 8
Serial Number
CyScan Sensor 40
Sidebar 12
Single-target navigation 29
Software Versions 40
Spacing Multiple Targets 51
Starboard Axes 30
Sub-zero Temperatures 52
Suspended 10, 38
System Logging 43
System Specications 57
T
Target
AS Prism 50
AS Target 28
Cylindrical 50
Installation 54
Installation Tips 51
Non-AS Target 28
Position 54
Prism 50
Spacing 51
Symbols 28
Types 54
Temperature 52
, 55
Tilt
Controls 25
Mode 25
Tracking
Multi-target 27
Overview 29, 30
Quality 18
Single-target 27
U
Using the Historic Alarm List 55
V
Vessel Heading 29, 35
Vessel Orientation 20
l
60
Page 61

Document History
Document Number Changes Issue Date
94-0560-A First release of CyScan AS Operator's Guide 25/10/2017
94-0560-B Corrections and Align Heading had been added 22/02/2018
l
61
Page 62

 Loading...
Loading...