

Guentner GMM f-drive, GMM sincon, GMM EC, GHM spray basic, GHM spray Operating Instructions Manual
...Page 1

Operating instructions
Güntner Hydro Management GHM spray
www.guentner.de
Operating instructions – Güntner Hydro Management GHM spray V_4.0
Page 2

Contents
Page 2 / 104
1 General notes............................................................................... 6
1.1 Safety instructions.............................................................................6
1.2 Proper intended use......................................................................... 6
1.3 Transport and storage, copyright notice........................................ 7
1.4 Warranty and liability........................................................................7
1.5 Manufacturer and supplier address................................................8
1.6 EMC-compliant installation..............................................................8
2 Short description......................................................................... 9
3 System operation in a master-slave configuration............... 10
4 Commissioning GHM spray......................................................12
4.1 The initial commissioning procedure........................................... 13
5 Construction of the GHM spray...............................................17
5.1 Remote controllers..........................................................................18
5.1.1 Functional description................................................................................... 18
5.1.1.1 Configurable step generator....................................................................... 22
5.1.2 Installation / Operating conditions.......................................................... 23
5.1.3 Connections....................................................................................................... 25
6 Display and operation...............................................................32
6.1 Info menu......................................................................................... 33
6.2 Operation.......................................................................................... 34
6.3 Edit mode......................................................................................... 35
6.4 Selection mode................................................................................36
6.5 Configuration....................................................................................37
6.5.1 Configuration table......................................................................................... 37
6.5.2 Control outputs on the GRCspray.1........................................................41
6.6 Control inputs.................................................................................. 42
6.6.1 Enabling of GHM spray................................................................................ 42
6.6.2 Enabling the fan................................................................................................... 43
6.6.3 Starting drain from externally............................................................................43
6.6.4 Setpoint switchover........................................................................................ 44
6.7 Analogue inputs...............................................................................44
6.7.1 Connecting a pressure sensor to AI1..................................................... 44
6.7.2 External power signal connection to AI1.............................................. 46
6.7.3 Connecting the conductivity sensor on AI2......................................... 47
6.7.4 Connecting a medium temperature sensor on AI3.......................... 47
6.7.5 Connecting a temperature sensor on AI4............................................ 48
6.7.6 Connecting an external voltage sensor on AI4................................... 48
6.8 Operating menu...............................................................................49
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 3

Page 3 / 104
6.8.1 Actual values..................................................................................................... 50
6.8.1.1 Input current values.......................................................................................50
6.8.1.2 Ambient temperature.................................................................................... 50
6.8.1.3 Control value..................................................................................................... 50
6.8.1.4 Steps..................................................................................................................... 51
6.8.1.5 Speed....................................................................................................................51
6.8.1.6 Conductivity....................................................................................................... 51
6.8.1.7 Setpoint................................................................................................................52
6.8.2 Status....................................................................................................................53
6.8.2.1 Operating modes.............................................................................................53
6.8.2.2 External release - Status.............................................................................. 53
6.8.2.3 Drained.................................................................................................................53
6.8.2.4 Configuration..................................................................................................... 54
6.8.2.5 GHM spray basic/prof................................................................................... 54
6.8.2.6 Section cycling..................................................................................................54
6.8.2.7 Heat exchanger................................................................................................ 54
6.8.2.8 Refrigerant.......................................................................................................... 54
6.8.2.9 Hardware and software versions.............................................................. 55
6.8.2.10 Setpoint displacement active/inactive................................................... 55
6.8.2.11 External drain....................................................................................................55
6.8.2.12 Inlet control........................................................................................................55
6.8.2.13 Bus module........................................................................................................55
6.8.3 Parameters......................................................................................................... 56
6.8.3.1 Parameter – Spraying from........................................................................ 56
6.8.3.1.1 Outdoor temperature.....................................................................................56
6.8.3.1.2 Hysteresis temp............................................................................................... 56
6.8.3.1.3 Speed....................................................................................................................57
6.8.3.1.4 Hysteresis rpm................................................................................................. 57
6.8.3.2 Setpoint................................................................................................................57
6.8.3.2.1 Setpoint 1 and Setpoint 2.......................................................................... 58
6.8.3.2.2 Setpoint delta min..........................................................................................58
6.8.3.2.3 Number of setpoints......................................................................................58
6.8.3.3 Draining................................................................................................................58
6.8.3.3.1 Downtime............................................................................................................ 59
6.8.3.3.2 Frost draining....................................................................................................59
6.8.3.3.3 Number of slave sections............................................................................ 59
6.8.3.4 Fault report.........................................................................................................59
6.8.3.4.1 Hours high..........................................................................................................59
6.8.3.4.2 Conductivity low...............................................................................................59
6.8.3.4.3 Conductivity high.............................................................................................60
6.8.4 Alerts..................................................................................................................... 61
6.8.4.1 Alert memory.................................................................................................... 61
6.8.5 Language.............................................................................................................62
6.8.5.1 Language selection.........................................................................................62
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 4

Page 4 / 104
6.8.6 Time.......................................................................................................................63
6.8.6.1 Time setting.......................................................................................................63
6.8.7 Date....................................................................................................................... 64
6.8.7.1 Set date............................................................................................................... 64
6.8.8 Manual mode.................................................................................................... 65
6.8.8.1 Manual mode.................................................................................................... 65
6.8.8.2 Manual mode settings.................................................................................. 67
6.9 Service...............................................................................................69
6.9.1 Control parameters.........................................................................................70
6.9.1.1 Control parameters Kp, Ti and Td...........................................................70
6.9.2 Heat exchanger................................................................................................ 71
6.9.2.1 Heat exchanger type......................................................................................71
6.9.3 Refrigerant.......................................................................................................... 72
6.9.3.1 Refrigerant selection...................................................................................... 72
6.9.4 Operating mode............................................................................................... 73
6.9.4.1 Auto internal......................................................................................................73
6.9.4.2 Auto external..................................................................................................... 73
6.9.4.3 Auto external BUS.......................................................................................... 74
6.9.4.4 Slave external....................................................................................................74
6.9.4.5 Slave external BUS......................................................................................... 74
6.9.5 Inlet control........................................................................................................75
6.9.6 Step parameters.............................................................................................. 76
6.9.6.1 Section cycling..................................................................................................76
6.9.6.2 Threshold value................................................................................................76
6.9.6.3 Off hysteresis.....................................................................................................76
6.9.6.4 Dead time........................................................................................................... 77
6.9.6.5 Minimum switch time................................................................................... 77
6.9.7 I/O configuration..............................................................................................77
6.9.7.1 Analogue inputs............................................................................................... 77
6.9.7.1.1 Current input AI1............................................................................................ 78
6.9.7.1.2 Current input AI2............................................................................................ 78
6.9.7.1.3 Switchable input AI3 (current/KTY)........................................................ 78
6.9.7.1.4 Voltage input AI4.............................................................................................79
6.9.7.2 Digital inputs..................................................................................................... 80
6.9.7.3 Analogue outputs............................................................................................ 81
6.9.8 SI/IP selection...................................................................................................81
6.9.8.1 SI/IP units system...........................................................................................82
6.9.9 Factory setting.................................................................................................. 83
6.9.9.1 Control reset (factory setting)....................................................................83
6.9.10 Delivery condition............................................................................................84
6.9.10.1 Control reset (delivery condition).............................................................84
6.9.11 H2O conductivity............................................................................................. 85
6.9.11.1 Storage of H2O conductivity values........................................................ 85
6.9.12 External bus module......................................................................................86
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 5

Page 5 / 104
7 Faults and troubleshooting.......................................................87
7.1 General notes...................................................................................87
8 Technical data............................................................................ 88
8.1 Component dimensions - Dimensions / Weight......................... 88
9 Electrical properties of the components................................90
10 Factory setting............................................................................93
11 Error messages and warnings................................................. 94
12 Index............................................................................................ 99
13 Picture index............................................................................103
14 Table index...............................................................................104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 6
1 General notes
1.1 Safety instructions
In order to prevent serious physical injuries or major material damage, work on or with the
unit may be performed only by authorised persons with appropriate training and qualifications who are familiar with the set-up, installation, commissioning and operation of electronic controllers. These persons must read the operating instructions carefully before the installation and commissioning. In addition to the operating instructions and national accident prevention regulations, all recognised technical rules (safety and professional work under UVV,
VBG, VDE etc.) must be followed.
Repairs to the device may only be made by the manufacturer or a repair centre authorised by
the manufacturer.
UNAUTHORISED AND IMPROPER INTERVENTIONS WILL INVALIDATE THE WARRANTY!
The applicable national accident prevention regulations must be followed when working on control
units under voltage.
Page 6 / 104
1.2 Proper intended use
The unit is intended only for the purposes agreed in the order confirmation. Any other application or use for any additional purpose, is not a proper intended use. The manufacturer accepts no liability for any injury or damage arising from unintended use. Proper intended use
is also contingent on compliance with the installation, operating and maintenance procedures
described in these operating instructions. The technical data and the details of the connection
assignments can be found on the type plate and in the instructions, and must be complied
with.
Electronic equipment is not fundamentally failsafe! The user must therefore ensure that his system reverts to a safe condition in the event of failure of the equipment. The manufacturer accepts
no responsibility for any damage to life and limb or to material goods and assets in the event of
failure to comply with this provision and in the event of improper use.
The electrical installation must be performed in accordance with the relevant regulations (e.g.
cable cross-sections, fuses, earth conductor connections, etc.). Additional information is included in the documentation. If the control unit is used in a particular area of application, the
required standards and regulations must be complied with.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 7
1.3 Transport and storage, copyright notice
The controllers are packaged appropriately for transport and may only be transported in
their original packaging. Avoid any impacts and collisions. Unless otherwise noted on the
packaging, the maximum stacking height is 4 packs. When you receive the equipment,
check for any damage to the packaging or the controller.
Store the equipment in its original packaging and protected from the weather, and avoid extremes of heat and cold.
Subject to technical changes in the interests of further development. Therefore no claims
may be derived from information, images and drawings; errors excepted!
All rights, including rights created by patent grant or other registration, are reserved.
These operating instructions are the copyright of
GÜNTNER GmbH & CO. KG
Fürstenfeldbruck
1.4 Warranty and liability
The current General Terms and Conditions of Sales and Delivery of Güntner GmbH & Co. KG
apply.
Page 7 / 104
See the homepage at http://www.guentner.de
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 8
1.5 Manufacturer and supplier address
Should you have a problem with any of our equipment, or any questions, suggestions or
special requests, simply contact
Güntner GmbH & Co. KG
Hans-Güntner-Strasse 2-6
D-82256 Fürstenfeldbruck, Germany
Service Telephone Germany:
0800 48368637
0800 GUENTNER
Service Telephone Worldwide:
+49 (0)8141 242-4815
Fax. +49 (0)8141 242-422
service@guentner.de
http://www.guentner.de
Page 8 / 104
Copyright © 2015 Güntner GmbH & Co. KG
All rights, including rights of photomechanical reproduction and storage in electronic form,
are reserved.
1.6 EMC-compliant installation
Controllers in the GHM spray series fulfil the requirements of EN 61000-6-2 as regards resistance to EMC interference and those of EN 61000-6-3 as regards emissions.
They also comply with standards IEC 61000-4-4/-5/-6/-11 for grid-bound interference. In order to guarantee EM compatibility, the following points must be noted:
All measurement and signalling lines must be connected via shielded cables.
• The shielding of measuring, signal and bus lines must be earthed at one end only.
• Suitable shielding and routing measures must be taken to ensure that mains cables and motor cables do not give rise to any interference in signal and control lines.
If the equipment is installed in a switch cabinet, proper attention must be given to the temperature
inside the cabinet. Güntner switch cabinets are provided with sufficient ventilation.
ADVICE
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 9

2 Short description
The GHM manages the spraying of heat exchangers. GHM spray basic can be used for only
one spraying step.
With GHM spray professional you can manage up to nine steps. This system is notable for its
minimal water consumption, which is achieved by spraying just enough sections to reach the
specified setpoint.
Page 9 / 104
Accumulated annual temperature curve
The illustrated example shows a cumulated medium temperature curve achieved with GHM
spray professional. In dry operation the medium temperature (condenser temperature or return temperature) follows the ambient temperature (areas 1 to3). When the ambient temperature is low, the medium temperature is held to the setpoint set up on the speed controller
(area4).
Using the GHM to regulate spraying calls for a second setpoint. In this example this setpoint is
chosen to be 30°C. This setpoint is set up in the GHM, having been calculated by the product
selection program GPC during the configuration process. The spraying setpoint determines
the length of time in hours the unit is sprayed, with reference to data pertaining to the local
climate. The higher the number of spraying hours for the unit the more precisely it can fulfil
the setpoint. While the ambient temperature is low (area4), the medium temperature follows
the setpoint of the speed controller. If the ambient temperature rises it will no longer be possible to reach the speed control setpoint (area3) because the fans will already be operating at
maximum speed. If the ambient temperature continues to rise (area2), the medium temperature will be governed by the setpoint of the GHM. If the ambient temperature rises so high
(area1) that the setpoint can no longer be reached, then the medium temperature will continue to rise at a corresponding displacement to the ambient value.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 10

3 System operation in a master-slave configuration
If a number of units are operated in a master-slave configuration, common inlet and drain
valves provided by the customer can be used for several units. These valves are then controlled exclusively by the master. The following device configurations allow master-slave control:
The master unit is operated in Auto internal mode. Auto internal mode has to be configured
on the spraying controller (GHM controller) as well as on the speed controller (GMM controller). The slave unit is operated in Slave external analogue mode.
Page 10 / 104
The master unit is operated in Auto external bus mode or Auto external analogue mode. Auto external mode has to be configured on the spraying controller (GHM controller) as well as
on the speed controller (GMM controller). The slave unit is operated in Slave external analogue
mode.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 11

Page 11 / 104
All units are operated in Slave mode. One of the slave units takes over control of the solenoid
valves provided by the customer. The device configuration indicates which unit activates the
valves provided by the customer. It has to be ensured in this mode of operation that all spraying controllers (GHM controller) and speed controllers (GMM controller) are configured in
Slave mode.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 12

4 Commissioning GHM spray
The GHM spray must be set up in accordance with the configuration of the heat exchanger
and the fans. This commissioning process determines the performance of the heat exchanger.
The GHM spray automatically detects whether commissioning has been carried out when it is
switched on and, if it has, continues with normal operation.
If the GHM spray detects that this has not yet been done, it initiates the commissioning procedure. When this procedure has been completed, all the specified parameters are saved.
Page 12 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 13
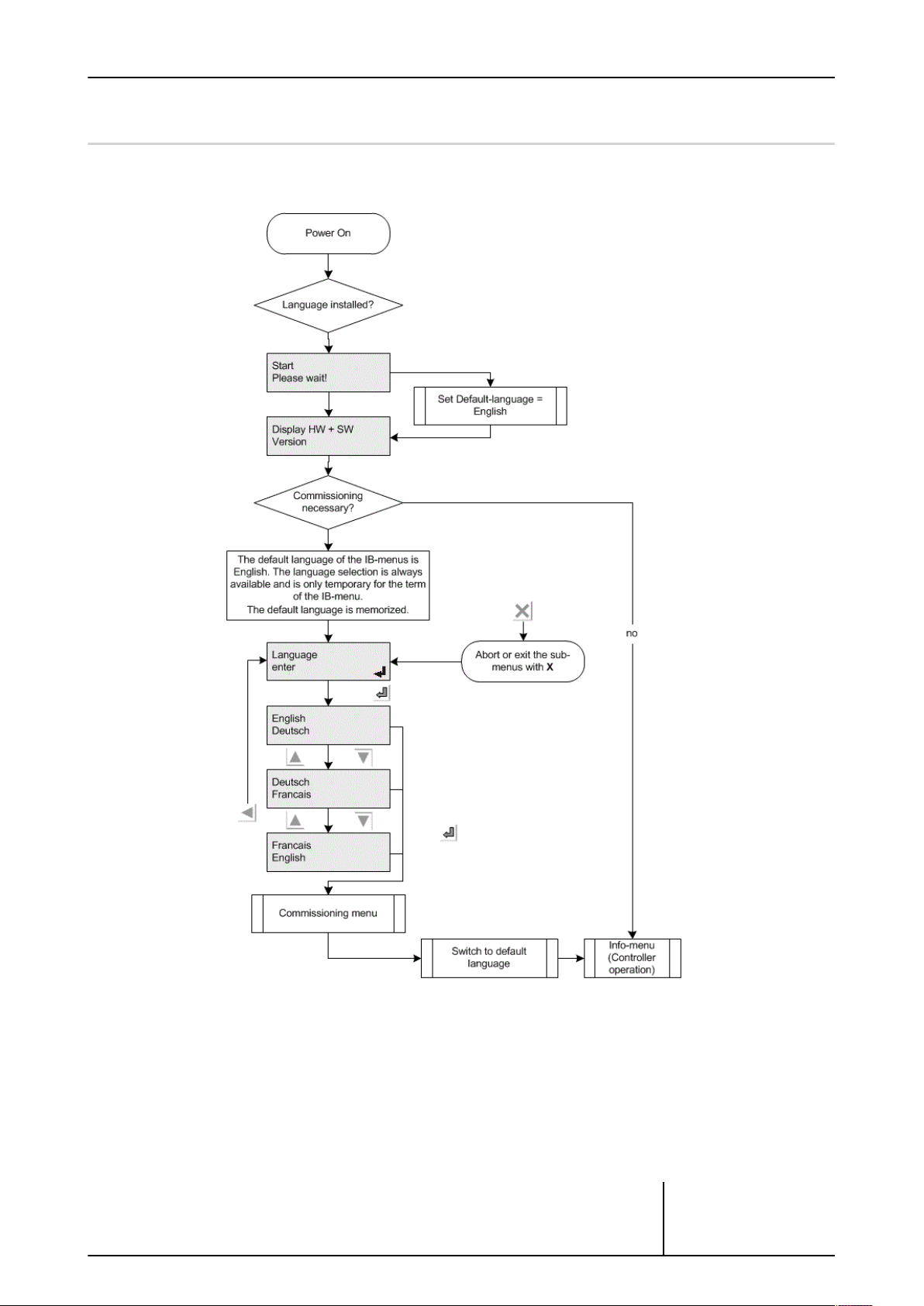
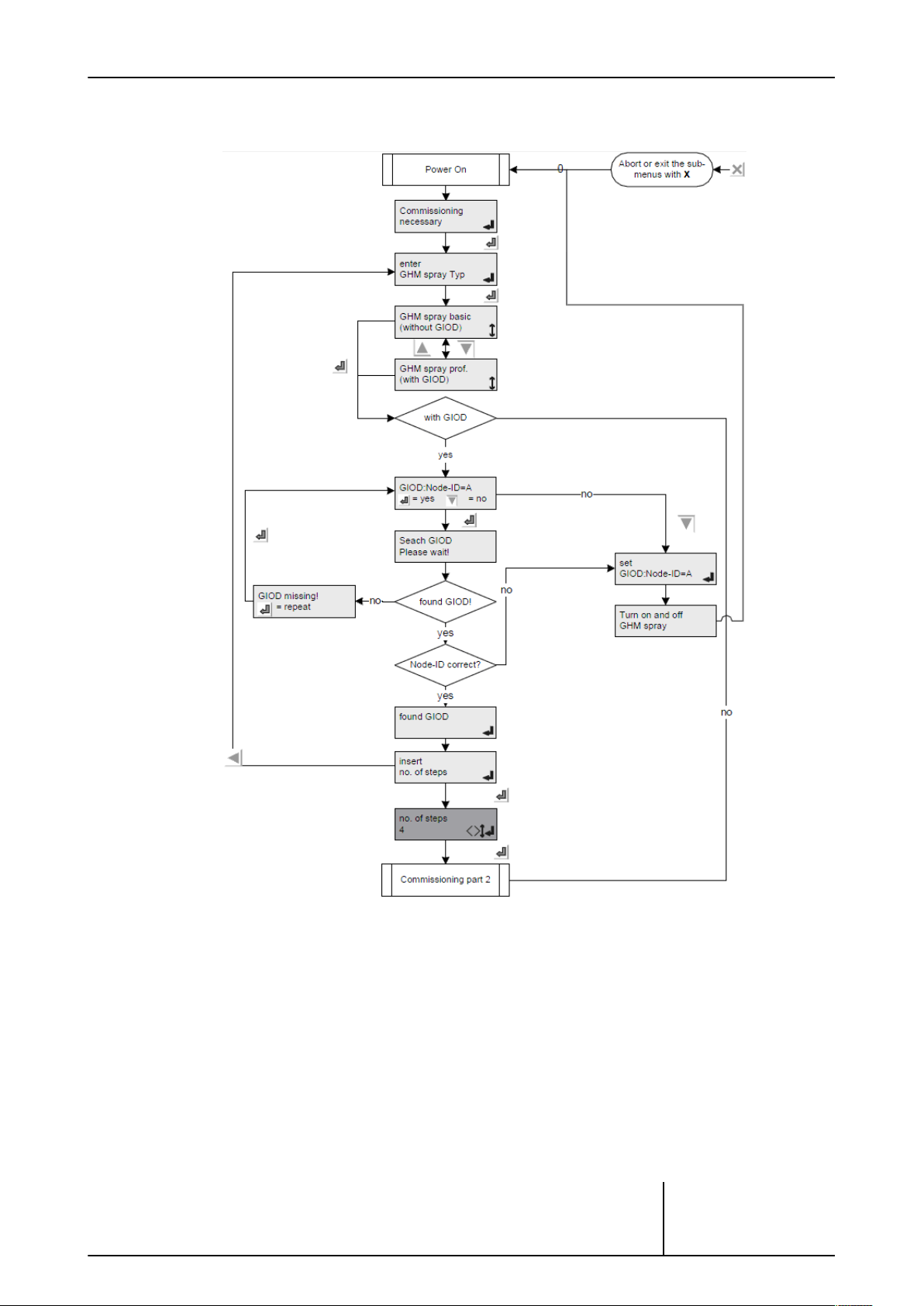
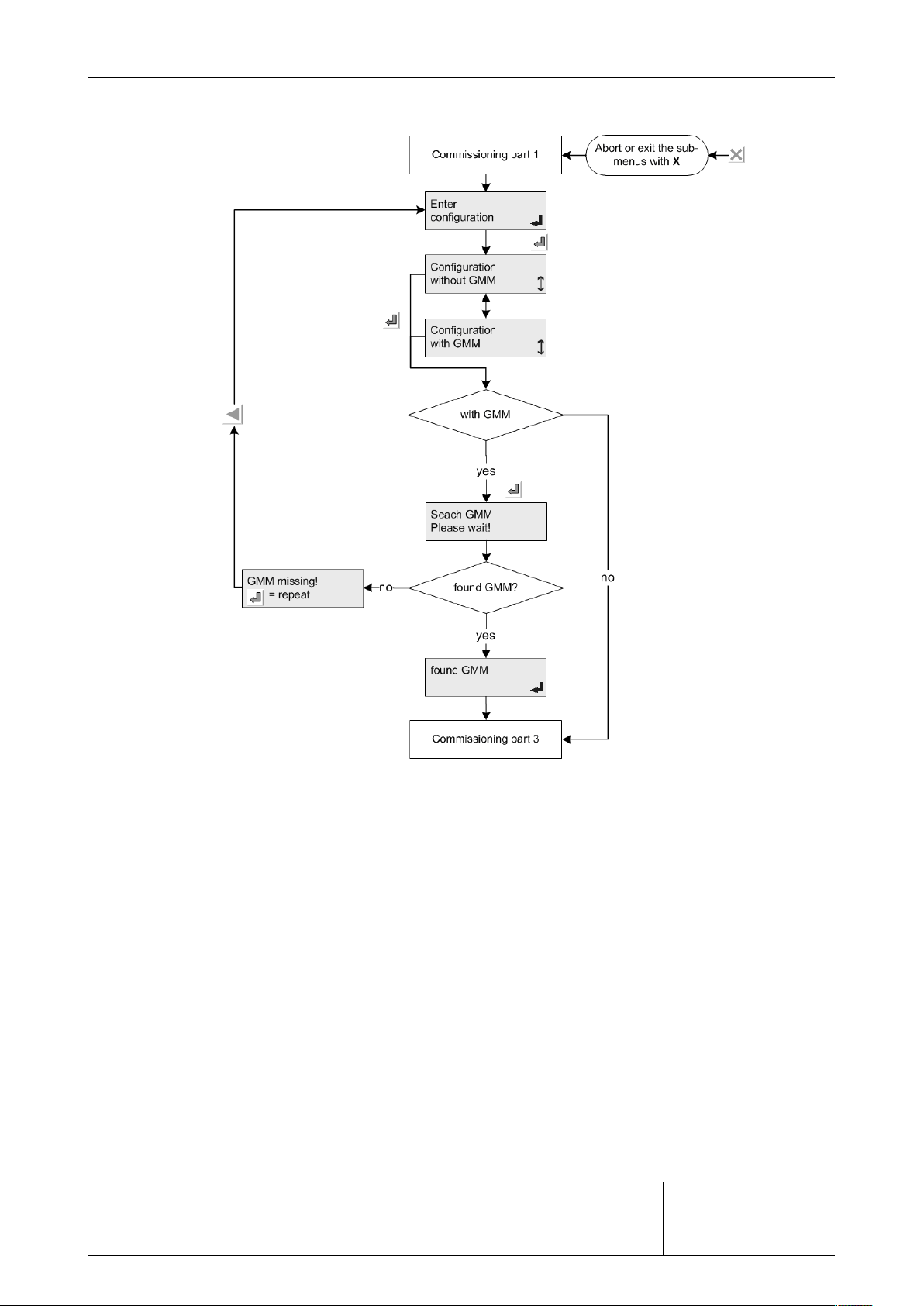
4.1 The initial commissioning procedure
If it is recognized that commissioning has not yet taken place, the following values are interrogated and set up in accordance with the following flow chart.
Page 13 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 14
Page 14 / 104
If it is recognized that a commissioning is required, the commissioning menu is displayed.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 15
Page 15 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 16

Page 16 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 17

5 Construction of the GHM spray
GHM spray basic system
GHM spray professional system
Page 17 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 18
5.1 Remote controllers
5.1.1 Functional description
Functional description of GRCspray.1
GRCspray.1 is used to manage spraying together with either a GMM speed controller with bus
communication or an external speed controller without bus communication. As a minimal solution, the GRCspray.1 can control one step
(variant GHM spray basic).
Page 18 / 104
Variant GHM spray basic
If you need more steps you will need to combine the GRCspray.1 with the GIOD.1 expansion
module, ERP no. 5204183
(variant GHM spray professional).
Variant GHM spray professional
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 19
Page 19 / 104
In order to operate the controller it must have a power supply and must be enabled via digital
input DI1. If this is not enabled the process will not be regulated.
The unit has an internal PID controller, whose parameters (amplification factor, integral time)
can be configured either per menu or via an external bus module.
The spraying setpoint can be specified from the internal menu.
The current value is determined via a pressure sensor (4-20mA), a temperature sensor (KTY,
GTF210) or via BUS from the GMM speed controller.
The relay outputs controlling the output stages are switched as appropriate for the setpoint
and the number of steps. A switch-on threshold can be configured for each step.
The digital inputs are designed as potential-free contacts that must be connected to +24V.
Spraying will be enabled only if the external enable (DI1) is connected and the fans are in operation. Fan operation is either conveyed from GMM to GHM via bus communication or by
means of an additional enable (D12). This enable (DI2) is valid only if there is no bus communication between GMM and GHM spray.
ADVICE
Please note that connecting the wrong voltage (e.g. 230V) may seriously damage the controller.
Relay outputs are used to control solenoid valves and activate warning messages. The CAN interface of the GRCspray.1 is an internal interface for communicating with other Güntner units
(such as the GIOD.1 expansion module). Communications modules are available for the following external bus connections: Modbus (GCM MOD GHMspray Rail.1, ERP no. 5206138)
and Profibus (GCM PROF GHMspray Rail.1, ERP no. 5206140).
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 20
Page 20 / 104
Functional description of GIOD.1
The GIOD.1 is controlled via CAN by a Güntner controller. The GIOD.1 possesses 16 digital inputs with a rated voltage of 24VDC and 8 relay outputs. The bus address of the GIOD.1 (node
ID) is set up using a rotary encoding switch. The address 0xF may not be used for this.
ADVICE
To operate the GIOD on GHM professional the rotary switch must always be set to addressA.
The GIOD reads this address only when first switched on.
To ensure the bus connection between the controller and one or more other units works correctly, bus termination must be activated at the beginning and end of the bus connection by
setting the units’ DIP switches labelled “Term”. They must be placed in the “ON” position to
activate the termination. Units that are in the middle of the bus and therefore permitted to
transfer the bus signal may not have bus termination activated.
The status of the inputs and outputs is indicated by LEDs on the front of the casing. A lit LED
against the digital inputs signifies that the corresponding input is receiving a “high” signal. A
lit LED against the relay outputs signifies that the closer contact is closed. A power LED signifies that the internal electronic components are receiving power.
There is also a status display for the bus connection that involves two LEDs.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 21
Page 21 / 104
Bus status LED Description
On The GIOD.1 is in operation
Flashing 50:50 The GIOD.1 can be taken into operation
Brief single flash The GIOD.1 is currently stopped
Three flashes with error LED The software is attempting to overrun the stack on the
GIOD.1
Alternate flashing with error
LED
Synchronous fast flashing with
error LED
Bus error LED Description
Off Unit is operating correctly
On There is a static fault on the CAN bus
Brief single flash The warning limit has been reached in the CAN controller
Double flashing A fault was detected in the lifeguard, nodeguard or heart-
Three flashes with the bus status LED
Alternate flashing with the bus
status LED
Synchronous fast flashing with
error LED
Power LED Description
On The internal electronics are receiving power
A “layer setting service” is being performed on the GIOD.1
Reset to default has been selected on the rotary coding
switch (setting “F”)
beat
The software is attempting to overrun the stack on the
GIOD.1
A “layer setting service” is being performed on the GIOD.1
Reset to default has been selected on the rotary coding
switch (setting “F”)
Off The unit is not powered or is reverse-poled
Digital input LED Description
On The digital input detects a “High” signal
Off The digital input detects a “Low” signal
Digital output LED Description
On The digital output is closed
Off The digital output is open
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 22
5.1.1.1 Configurable step generator
The step generator comprises three main components
1. Step generator
The step generator generates a bit pattern for the outputs that are to be switched depending
on the number of steps, their thresholds, their hysteresis and the hold-off time (=default setting).
Page 22 / 104
2. Section cycling
Section cycling ensures even distribution of the running times for the outputs (the sections).
To this end it records and evaluates the running times of all the active outputs.
Active section cycling means,
- when a step is switched on, the output with the least running time is activated.
No change is made to any outputs that were already active.
- when a step is switched off, the output with the highest running time is deactivated.
- when no change is made (the number of outputs does not change for a period of one hour)
no outputs are switched over.
- An even distribution of running times can be achieved only in association with the
installation’s general control behaviour on the basis of higher or lower heat exchanger performance.
ADVICE
When section cycling is deactivated, steps and outputs are correlated 1:1. In other words, step1
switches output1, step2 switches output2, and so on.
When section cycling is active, an active step is assigned to an output depending on its running time.
The current assignments are shown in the Current values menu.
3. Outputs
The outputs are the physical correlations of steps to outputs.
This depends on the type of GHM spray and the number of steps.
See also Configuration table, Page 37
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 23
5.1.2 Installation / Operating conditions
Installation / Operating conditions GRCspray.1
• The module is designed for mounting on a top-hat rail.
• All measurement and signalling lines must be connected via shielded cables.
• The shielding of measuring, signal and bus lines must be earthed at one end only.
• Suitable shielding and routing measures must be taken to ensure that mains cables and
motor cables do not give rise to any interference in signal and control lines.
• Temperature:
Storage Transport:
Operation:
• Protection rating: IP 20
• Recommended cables: Belden9841, Lapp 2170203, Lapp 2170803, Helukabel 81910
-20°C ... +70°C
-20°C ... +65°C
Page 23 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 24

Page 24 / 104
Installation / Operating conditions GIOD.1
• The module is designed for mounting on a top-hat rail.
• Bus lines that are not wired via the supplied ribbon cable must be shielded.
• The shielding of bus lines must be earthed at one end only.
• Suitable shielding and routing measures must be taken to ensure that mains cables and
motor cables do not give rise to any interference in signal and control lines.
• Temperature:
Storage location,
Transport
Operation:
• Protection rating: IP 20
-20°C .. +70°C
-20°C .. +65°C
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 25
5.1.3 Connections
Connections GRCspray.1
Page 25 / 104
Upper row of connections
Name Description
Service Service plug only for use by service personnel
TB1
TB2
Firm Pushbutton only for use by service personnel
+24V
+24V
GND
GND
GND
11
12
14
21
22
24
31
32
34
41
External feed for power supply
Contact ground for external power feed
Terminal not connected
relay DO1
relay DO2
relay DO3
42
44
relay DO4
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 26
Lower row of connections
Name Description
AO1 Analogue output 1, 0-10V
GND Ground
AO2 Analogue output 2, 0-10V
Page 26 / 104
TB3
TB4
GND Ground
+24V Voltage +24V
DI1 Digital input +24V
DI2 Digital input +24V
DI3 Digital input +24V
+24V Voltage +24V
+24V Voltage +24V
GND Ground
AI1 Analogue output 4-20mA
AI2
AI3 Analogue input for temperature sensor GTF
AI4 Analogue input 0-10V
GND Ground
+24V
+24V
Term DIP switch for CAN bus termination (120Ω) / ON = termination activated
Analogue input 4-20mA or for temperature sensor GTF must be configured in the soft-
ware
Voltage +24V
+24V Voltage +24V
TB5
GND Ground
CH CAN high signal
CL CAN low signal
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 27
GND Ground
+24V Voltage +24V
CAN CAN bus plug including power supply
*TB: Terminal block
Page 27 / 104
Lower row of connections
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 28
Page 28 / 104
Connections GIOD.1
Upper row of connections
Name Description
DI1 Digital input 1
DI2 Digital input 2
TB1
TB2
TB3
DI3 Digital input 3
DI4 Digital input 4
DI5 Digital input 5
DI6 Digital input 6
DI7 Digital input 7
DI8 Digital input 8
13
Relay contact 1 closer
14
23
Relay contact 2 closer
24
33
Relay contact 3 closer
34
43
Relay contact 4 closer
44
53
Relay contact 5 closer
54
63
Relay contact 6 closer
64
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 29
Name Description
73
74
83
84
Page 29 / 104
Upper row of connections
Relay contact 7 closer
Relay contact 8 closer
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 30
Lower row of connections
Name Description
CAN CAN bus plug including power supply
Page 30 / 104
TB4
TB5
+24V
+24V
GND Contact ground for external power feed
CH CAN high signal
CL CAN low signal
Node ID
DI9 Digital input 9
DI10 Digital input 10
DI11 Digital input 11
DI12 Digital input 12
DI13 Digital input 13
DI14 Digital input 14
DI15 Digital input 15
External feed for power supply
Rotary switch for setting the bus node address
0: Address 0
1: Address 1
-
E: Address 14
F: Reset CANopen parameters to their default values
DI16 Digital input 16
+24V
+24V
TB6
Operating instructions – Güntner Hydro Management GHM spray V_4.0
+24V
GND
GND
Voltage +24V
Ground
© Güntner GmbH & Co. KG
Page 31

Lower row of connections
Name Description
GND
Term DIP switch for CAN bus termination (120Ω)
CAN CAN bus plug including power supply
Page 31 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 32

6 Display and operation
Information and error messages are shown on a two-line display. The controller is operated
via a membrane keyboard.
Page 32 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 33

6.1 Info menu
Page 33 / 104
The Info menu shows the current status messages and, if available, the incident reports for
the controller.
If a number of incidents have occurred, these will be shown alternately on the display.
The display depends on the device variant selected.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 34

6.2 Operation
Page 34 / 104
Cancel and return to INFO menu
Enter key for function selection; change to EDIT mode and value acceptance
Right arrow for moving to the next menu level.
Left arrow for moving to the previous menu level.
Up/down arrow for scrolling through the menu level.
1. Use this key to move from the INFO menu to the Operating menu.
2. Use this key to return to the INFO menu at any time.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 35

6.3 Edit mode
This mode is required to change values (setpoints, for example).
Select menu option you want
(top line)
Change to menu option
Change to writing mode
(cursor flashes)
Page 35 / 104
Decimal point selection
(cursor flashes)
Change value
New value acceptance
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 36

6.4 Selection mode
This mode is required to select functions (language, for example).
Select menu option you want
("Language", for example, top line)
Change to the menu option
→ The function/language currently set
is marked with an *asterisk*.
Set target language by scrolling to the
top line
→ selected function/language in top line
Page 36 / 104
Accept function/language.
→ selected language is marked with an
*asterisk*.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 37

6.5 Configuration
6.5.1 Configuration table
The GHM spray is configured with an appropriate number of potential-free contacts. Their assignments will differ depending on the configuration.
GRCspray.1 with GMM:
Page 37 / 104
Condenser Drycooler
GRCspray.1
I/O Signal GRCspray.1
basic
DI1 24V External enabling
DI2 24V Starting drain from externally
DI3 24V Switching to 2nd setpoint
AI1 4..20mA Control value (Slave) / Setpoint (Auto external) / Free
AI2 4..20mA/KTY Free Conductiv-
AI3 KTY Free
AI4 0..10V Ambient temperature / Control value (Slave)
AO1 0..10V Control value / Control value from master unit
AO2 0..10V Fault report: <5V = Fault, >5V = No fault
DO1 Relay
Solenoid drain
valve in the
system (NO)
DO2 Relay Drain signal
for slave units
GRCspray.1
professional
ity sensor
Solenoid valve inlet installed on site (NC) /
Solenoid valve drain installed on site (NO)
– Solenoid drain
Drain valves
in the system
GRCspray.1
basic
Free Conductiv-
valve in the
system (NO)
Drain signal
for slave units
GRCspray.1
professional
in the system
ity sensor
–
Drain valves
DO3 Relay Spraying so-
lenoid valve
DO4 Relay Fault report Section 9 or
CAN BUS
Pressure or return temperature/release via control val-
ue/setpoint/heat exchanger type/refrigerant/units system
GIOD.1
DO1 Relay - Section 1 - Section 1
DO2 Relay - Section 2 - Section 2
DO3 Relay - Section 3 - Section 3
Table: Configuration table GRCspray.1 with GMM
Operating instructions – Güntner Hydro Management GHM spray V_4.0
Solenoid valve
water supply
(NO) / (drain
signal for
slave units)
fault report
Data from GMM:
Solenoid valve
Spraying so-
lenoid valve
Fault report Section 9 or
water supply
(NO) / (drain
signal for
slave units)
fault report
© Güntner GmbH & Co. KG
Page 38

Page 38 / 104
Condenser Drycooler
I/O Signal GRCspray.1
basic
DO4 Relay - Section 4 - Section 4
DO5 Relay - Section 5 - Section 5
DO6 Relay - Section 6 - Section 6
DO7 Relay - Section 7 - Section 7
DO8 Relay - Section 8 - Section 8
GRCspray.1
professional
GRCspray.1
basic
Table: Configuration table GRCspray.1 with GMM
The GRCspray.1 professional variant requires additional hardware (GIOD.1, BAAN no.
5204183).
GRCspray.1
professional
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 39

GRCspray.1 None GMM:
Page 39 / 104
Condenser Drycooler
GRCspray.1
I/O Signal GRCspray.1
basic
DI1 24V External enabling
DI2 24V Enabled: Fans ON
DI3 24V Switching to 2nd setpoint
AI1 4..20mA Pressure sensor / Con-
trol value (Slave) / Set-
point (Auto external) / Free
AI2 4..20mA/KTY
AI3 KTY Free Return temperature
AI4 0..10V Ambient temperature / Control value (Slave)
AO1 0..10V Control value / Control value from master unit
AO2 0..10V Fault report: <5V = Fault, >5V = No fault
DO1 Relay
Free
Solenoid drain
valve in the
system (NO)
GRCspray.1
professional
(e.g. operating message from fan speed con-
troller) / Starting drain from externally
Conductiv-
ity sensor
Solenoid valve inlet installed on site (NC) /
Solenoid valve drain installed on site (NO)
- Solenoid drain
GRCspray.1
basic
Control value (Slave) / Set-
point (Auto external) / free
Free
valve in the
system (NO)
GRCspray.1
professional
Conductiv-
ity sensor
-
DO2 Relay Drain signal
for slave units
DO3 Relay
Spraying so-
lenoid valve
DO4 Relay Fault report Section 9 or
CAN BUS
GIOD.1
DO1 Relay - Section 1 - Section 1
DO2 Relay - Section 2 - Section 2
DO3 Relay - Section 3 - Section 3
DO4 Relay - Section 4 - Section 4
DO5 Relay - Section 5 - Section 5
DO6 Relay - Section 6 - Section 6
Table: Configuration table GRCspray.1 None GMM
Drain valves
in the system
Solenoid valve
water supply
(NO) / (drain
for slave units)
fault report
Drain signal
for slave units
Spraying so-
lenoid valve
Fault report Section 9 or
-
Drain valves
in the system
Solenoid valve
water supply
(NO) / (drain
for slave units)
fault report
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 40

Page 40 / 104
Condenser Drycooler
I/O Signal GRCspray.1
basic
DO7 Relay - Section 7 - Section 7
DO8 Relay - Section 8 - Section 8
GRCspray.1
professional
GRCspray.1
basic
Table: Configuration table GRCspray.1 None GMM
The GRCspray.1 professional variant requires additional hardware (GIOD.1, BAAN no.
5204183).
GRCspray.1
professional
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 41

6.5.2 Control outputs on the GRCspray.1
Digital output (DO1):
Digital output DO1 is used to control the on-site solenoid valves. An NC solenoid valve (normally closed) is to be provided to feed the system and an NO solenoid valve (normally open)
for on-site draining. The valves are powered when contact 11/14 is closed.
The drain valve in the system is connected additionally to DO1 in the case of the "basic" system.
Digital output (DO2):
Digital output DO2 is used to control two solenoid drain valves in the system in the case of the
professional system. The valves are powered when contact 21/24 is closed.
Digital output DO2 is not occupied in the case of the "basic" system or is intended as a drain
signal for additional slave systems.
Digital output (DO3):
Digital output DO3 is used to control the solenoid valve on the unit’s water inlet. The valve is
powered when contact 31/34 is closed. If several units are operated in master-slave mode, the
drain command is sent to the slave unit via this output signal in the case of the professional
system.
The solenoid valve is connected to DO3 for spraying in the case of a GHM basic controller.
Page 41 / 104
Digital output (DO4):
Digital output DO4 is used for the fault report. If a fault is pending, contact 41/44 is activated.
The exception here is a device with 9 sections. Output DO4 is used in this case to activate the
9th step. The fault report is picked up in this case on AO2. (See I/O configuration, Page 77)
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 42
6.6 Control inputs
The control inputs are designed as a low-voltage connection and are connected via a potential-free contact (relay, contactor contact, switch etc.). The potential-free contact must be
switched between the terminals +24V and the DI1 or DI2 or DI3 control input. The function is
activated when the contact is closed.
6.6.1 Enabling of GHM spray
Spraying is enabled via terminal DI1 (enable). If this enable is not switched, spraying will be
disabled.
If it is not to be enabled externally, terminal DI1 must be jumpered.
This enabling jumper is always installed in the factory.
Page 42 / 104
Connection of external enable contact +24V – DI1
ADVICE
Under no circumstances may the controller be disabled by interrupting the supply voltage! Continuously switching the supply voltage can damage the controller and such damage is not covered by
the warranty!
Enable is not required in "Manual" mode.
See Manual mode, Page 65
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 43

6.6.2 Enabling the fan
(only if there is no active bus communication to a GMM)
If the GHM is not operated with a Güntner speed controller (bus communication between
GMM and GHM), a further enable via digital input DI2 is required. This enable serves to ensure
that the fans are in operation.
Connection for enabling the fan +24V - DI2
Page 43 / 104
Under no circumstances may you disable the controller by disconnecting its power supply!
Continual switching of the power supply may damage the controller, and such damage is not covered by the warranty!
Enable is not required in "Manual" mode.
See Manual mode, Page 65.
6.6.3 Starting drain from externally
The drain can be started from externally via input DI2.
ADVICE
Connection for starting the drain from externally +24V
- DI2
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 44
6.6.4 Setpoint switchover
The setpoint switchover can be activated via digital input DI3. The second setpoint has to be
configured in the menu.
6.7 Analogue inputs
The GHM has four sensor inputs:
Page 44 / 104
Input AI1 Current input 4-20mA
Input AI2 switchable 4-20mA or impedance sensor GTF210
Input AI3 Impedance sensor GTF210
Input AI4 Voltage source 0-10V DC
The various ways of using inputs and how to connect them in each case are described below.
6.7.1 Connecting a pressure sensor to AI1
Operating mode: Auto internal
Depending on the operating mode, the current input at AI1 can be configured differently
(see I/O configuration, Page 77).
If there is no bus communication to a GMM, then condensers have a two-wire sensor connected to AI1. If both a GHM and a GMM are present, the pressure signal from the GMM is
passed via the bus to the GHM and the pressure connection is then not required.
= Common supply voltage (GSW4003.1: brown(1), GSW4003:brown(1))
+24V
= 4-20mA signal from sensor 1 (GSW4003.1: blue(3), GSW4003: green(2))
AI1
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 45

Page 45 / 104
ADVICE
Three-wire sensors with a 4-20 mA signal output can also be connected, but these then require an
additional chassis potential. You can tap this from the GND terminal.
Important for pressure sensors: To protect the sensor from large pressure impacts and vibrations, do not install it in the immediate vicinity of the compressor. It should be installed as
close to the condenser inlet as possible.
Pressure transmitter connection
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 46

6.7.2 External power signal connection to AI1
The AI1 input can also be used to control the controller in SLAVE operation.
To do this, this input must be defined as a control value slave in the I/O configuration.
The 4..20mA input signal is scaled 0-100% to a control signal and the corresponding steps
switched on the basis of the thresholds set.
Furthermore, the setpoint can be specified externally via the AI1 input.
One power signal (4-20mA) can be connected to the AI1 analogue input.
GND = Reference point (–).
AI1 = Current input (+) 4..20mA
Make sure the current source polarity is correct!
Page 46 / 104
ADVICE
Power source connection
For current inputs, note that currents of less than 2.4mA or greater than 22mA will provoke a
sensor fault display and corresponding message.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 47
6.7.3 Connecting the conductivity sensor on AI2
(only for the professional system)
A conductivity sensor for recording the water quality is connected on AI2.
6.7.4 Connecting a medium temperature sensor on AI3
Drycoolers (with no bus communication to a GMM) have a return temperature sensor connected to AI3.
A temperature sensor is connected on the terminals
GND
AI3
There is no particular sequence for the cores.
The Güntner GTF210 temperature sensor is used in the range -30°C to +70°C. Please contact us for other temperature ranges.
= Earth
= Signal input
Page 47 / 104
Temperature sensor connection
To test a temperature sensor that may be defective, disconnect it from the controller and measure the impedance of the sensor (with an ohmmeter or multimeter). On the GTF210 , the impedance should be between 1.04 kΩ (-50°C) and 3.27kΩ (+100°C). You can use the table below to check whether the sensor has the correct impedance at a known temperature.
Impedance Temperature Impedance Temperature
1040Ω -50°C 2075Ω 30°C
1095Ω -45°C 2152Ω 35°C
1150Ω -40°C 2230Ω 40°C
1207Ω -35°C 2309Ω 45°C
1266Ω -30°C 2390Ω 50°C
1325Ω -25°C 2472Ω 55°C
1387Ω -20°C 2555Ω 60°C
1449Ω -15°C 2640Ω 65°C
1513Ω -10°C 2727Ω 70°C
1579Ω -5°C 2814Ω 75°C
Table: Temperature / Impedance
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 48

Impedance Temperature Impedance Temperature
1645Ω 0°C 2903Ω 80°C
1713Ω 5°C 2994Ω 85°C
1783Ω 10°C 3086Ω 90°C
1854Ω 15°C 3179Ω 95°C
1926Ω 20°C 3274Ω 100°C
2000Ω 25°C 3370Ω 105°C
Table: Temperature / Impedance
6.7.5 Connecting a temperature sensor on AI4
A temperature sensor for recording the ambient temperature is connected to AI4.
A standard signal (0-10V) is connected on the terminals
= Earth (negative)
GND
AI4 = Signal input 0-10V DC (max. 12 DC)
Page 48 / 104
0-10V standard signal connection
6.7.6 Connecting an external voltage sensor on AI4
A standard signal (0-10V) is connected on the following terminals
= Earth (negative)
GND
= Signal input 0-10V DC (max. 12V DC)
AI4
ADVICE
Make sure the polarity is correct (earth to GND, signal to AI4)!
The 0-10V input is mostly used to operate the controller in SLAVE or Auto external mode. To
do this, this input must be defined as a slave or setpoint input in the I/O configuration. The
0-10V input signal is scaled 0-100% in a control signal and passed on to the spraying controller.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 49

6.8 Operating menu
Structure of basic menu
Page 49 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 50

6.8.1 Actual values
The actual input signals and control values are shown here.
6.8.1.1 Input current values
You can have a number of quantities displayed by calling up the menu item Current values.
The measured temperature or pressure is displayed first. Which value is displayed depends on
the type of cooler (condenser or drycooler).
Page 50 / 104
Condenser
Condenser
Drycooler
6.8.1.2 Ambient temperature
The current ambient temperature is shown.
6.8.1.3 Control value
The control value of the controller that is used to generate the steps is displayed in percent.
No refrigerant
Refrigerant selected
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 51

6.8.1.4 Steps
6.8.1.5 Speed
Page 51 / 104
Here the system displays the current status of the switching step and the corresponding spray
section.
The length of the list depends on the number of configured steps.
When the GHM is combined with a GMM (Güntner Motor Management) this displays the fan
speed. This display will not appear if there is no bus communication to a GMM.
6.8.1.6 Conductivity
The spraying water's conductivity is displayed here.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 52

6.8.1.7 Setpoint
Page 52 / 104
The control value of the master is displayed here for a master-slave controller.
ADVICE
Based on the control concept, the GHM controller's setpoint must always be at least 2 Kelvin higher
than the setpoint on the speed controller.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 53

6.8.2 Status
The operating statuses and software/hardware versions are displayed here.
6.8.2.1 Operating modes
The current operating mode is displayed here.
Auto internal Setpoint 1 Shows the current setpoint for spraying
Auto internal Setpoint 2 If a second setpoint was configured, it will be displayed here
Slave external AI1 Shows the control value pre-set via AI1 for slave operation
Slave external Bus Shows the control value pre-set via a bus signal for slave opera-
Auto external AI1 Shows the setpoint pre-set via AI1
Auto external Bus Shows the setpoint pre-set via a bus signal
Page 53 / 104
tion
6.8.2.2 External release - Status
Controller on connection DI1 enabled "OK" or not "None"
6.8.2.3 Drained
Indicates that the spraying system is empty as far as the on-site solenoid valves.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 54

6.8.2.4 Configuration
The current configuration is displayed here.
Page 54 / 104
With GMM
Without
GMM
Manual
6.8.2.5 GHM spray basic/prof.
This shows whether the controller is a GHM spray professional or a GHM spray basic. The display also shows how many spraying steps are configured in the controller.
6.8.2.6 Section cycling
This shows whether the Section cycling function is activated. This function is present only in
GHM spray professional.
This shows that the GHM is operating with a GMM (Güntner Motor Management).
This shows that the GHM is operating as an independent controller.
This shows that the GHM is operating in manual mode.
6.8.2.7 Heat exchanger
The heat exchanger type is displayed here.
6.8.2.8 Refrigerant
If a condenser has been selected as the heat exchanger, the selected refrigerant is displayed
here. If no refrigerant has been selected, “bar” is displayed.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 55

6.8.2.9 Hardware and software versions
This shows information about the current hardware and software versions of the GHM.
GHM = Güntner Hydro Management
GIOD = Güntner Input Output Device
H = Hardware version
S = Software version
6.8.2.10 Setpoint displacement active/inactive
It is shown here whether the current setpoint is displaced.
Page 55 / 104
This is possible if a GHM controller is operating in combination with a GMM controller. If the
setpoint is displaced in the case of the GMM controller, the GHM setpoint may also be displaced automatically, thus ensuring that the GHM setpoint is always higher than the GMM setpoint.
6.8.2.11 External drain
If DI2 is configured as an external drain, the status will be shown here.
6.8.2.12 Inlet control
It is shown here whether the unit has been configured such that the common on-site feed
valve is activated with master-slave control.
6.8.2.13 Bus module
This display provides information on the module type, firmware version and the address of the
GCM bus module, when it is connected.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 56

6.8.3 Parameters
The parameters are configured in this menu.
6.8.3.1 Parameter – Spraying from
Here you set up the conditions that activate spraying.
Page 56 / 104
6.8.3.1.1 Outdoor temperature
Here you set up the ambient temperature at which spraying is enabled.
Note: Spraying will not begin until the setpoint (parameter → Spraying from → setpoint) is
reached or exceeded.
6.8.3.1.2 Hysteresis temp.
Here you set up hysteresis values for the outdoor temperature. For example, if the starting
temperature for spraying is set to 30° with a hysteresis of 3K, spraying will not switch off until
the ambient temperature drops below 27°C.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 57

6.8.3.1.3 Speed
(only if there is active bus communication to a GMM)
Here you set up the fan speed from which spraying is enabled. This function is available only
for a GHM in combination with a GMM. If there is currently no bus communication to a GMM,
the GHM can be enabled additionally by means of digital input contact DI2, assuming this has
been defined in the IO configuration.
6.8.3.1.4 Hysteresis rpm
(only if there is active bus communication to a GMM)
Here you set up the hysteresis that is responsible for enabling spraying according to the fan
speed. For example, if the starting speed for spraying is set up as 90% with a hysteresis of
10%, spraying will not be switched off until the speed drops below 80%.
Page 57 / 104
6.8.3.2 Setpoint
Here you set up the setpoint for spraying.
The following table shows the value to which the setpoint refers, depending on the heat exchanger configuration.
Refrigerant configured in the controller.
Temperature regulation!
Condenser
Refrigerant not configured in the
controller.
Pressure regulation!
Dry cooler Temperature regulation!
Setpoint depends on the condensation temperature
Setpoint depends on the condenser pressure
Setpoint depends on the return
temperature of the refrigerant
medium
ADVICE
Based on the control concept, the GHM controller's setpoint must always be at least 2 Kelvin higher
than the setpoint on the speed controller.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 58

6.8.3.2.1 Setpoint 1 and Setpoint 2
The setpoints that govern spraying are defined here.
If a second setpoint is required, it has to be activated under the "No. of setpoints" menu option.
6.8.3.2.2 Setpoint delta min.
The minimum interval between the GHM and GMM setpoint is displayed here.
Page 58 / 104
The GHM setpoint must always be higher than the GMM setpoint. If the GMM setpoint is displaced, this parameter ensures that the GHM setpoint is higher than the GMM setpoint by the
specified interval.
6.8.3.2.3 Number of setpoints
A second setpoint can be activated here.
6.8.3.3 Draining
Here you set up the parameters that govern draining.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 59

6.8.3.3.1 Downtime
Here you set the amount of downtime (during which spraying is inactive) after which the pipes
of the spraying system will be drained. It is necessary to empty the system periodically to prevent the build-up of Legionella in the water
6.8.3.3.2 Frost draining
If the ambient temperature is lower than the specified frost temperature, the system is
drained automatically.
6.8.3.3.3 Number of slave sections
The number of spraying steps of the largest slave unit is displayed here for master-slave control.
Page 59 / 104
6.8.3.4 Fault report
Here you set up the parameters that govern fault reports.
6.8.3.4.1 Hours high
An alarm message is generated if the number of hours of spraying per year exceeds the specified value.
6.8.3.4.2 Conductivity low
An alarm message is generated if the conductivity of the water drops below the specified value.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 60
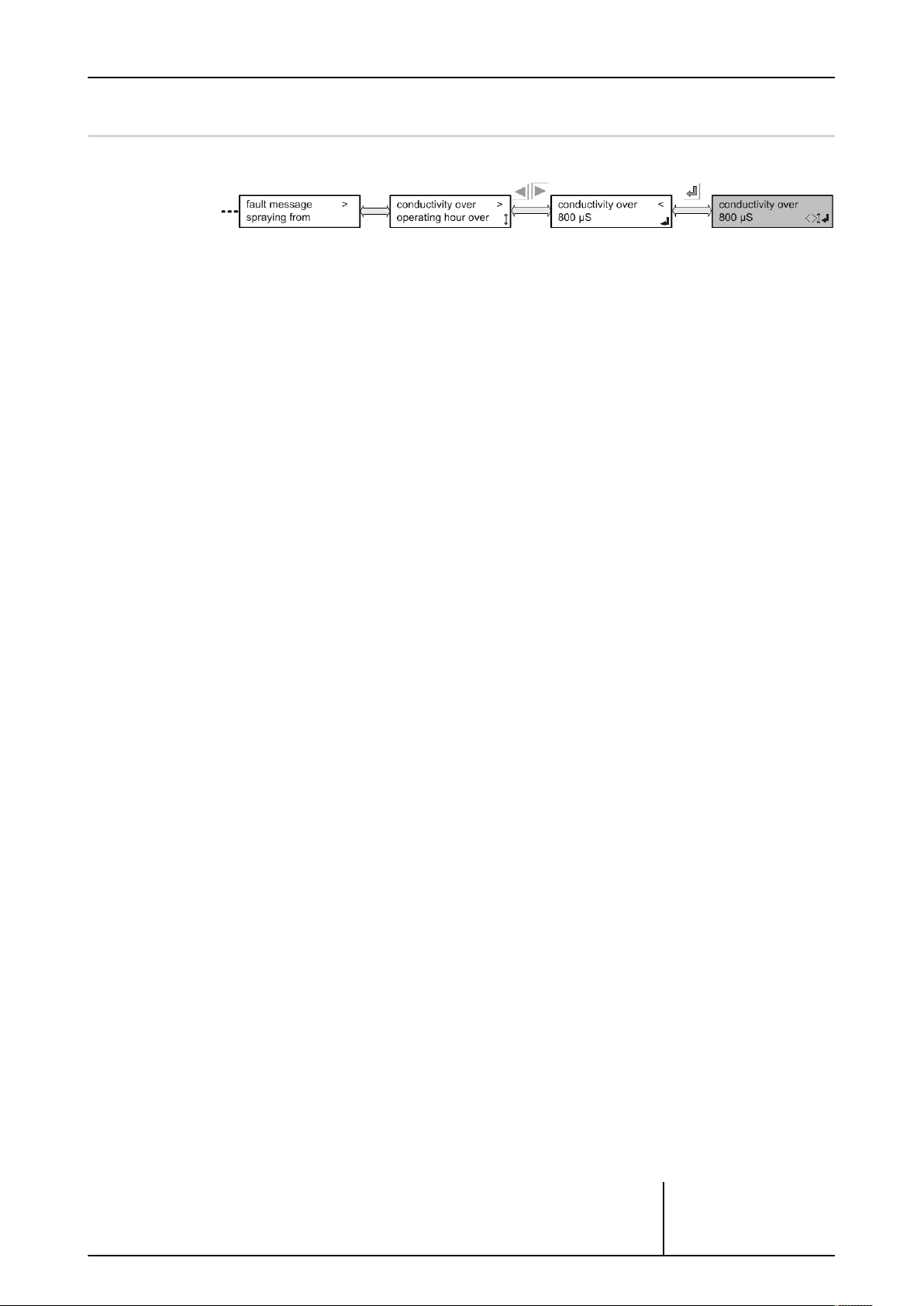
6.8.3.4.3 Conductivity high
An alarm message is generated if the conductivity of the water exceeds the specified value.
Page 60 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 61

6.8.4 Alerts
The last 85 alerts can be called up here.
6.8.4.1 Alert memory
The GHM has an alert memory that can accommodate up to 85 incident report, turn-on and
reset times stored consecutively (cyclically). These incident reports consist of the fault and
the time stamp, comprising the date and time when the fault occurred. For a list of error
messages and warnings see Error messages and warnings , Page 94.
When the alert memory is selected, the display shows the last fault that occurred.
Use the “down” arrow key to display older faults.
Page 61 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 62

6.8.5 Language
The menu language can be selected here.
6.8.5.1 Language selection
3 languages can be selected in the Language selection menu. The selected language is
marked with an *asterisk*.
Page 62 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 63

6.8.6 Time
The time can be selected here.
6.8.6.1 Time setting
The set time is displayed and changed where required in the 24-hour clock.
The time is used to enter the alarm times in the alarm memory and for all timer functions.
Page 63 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 64

6.8.7 Date
6.8.7.1 Set date
Page 64 / 104
The date can be set here.
The date is used to enter the alarm times in the alarm memory and for all timer functions.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 65

6.8.8 Manual mode
Manual mode is used to manually activate spraying of the heat exchanger,
draining or to operate individual valves.
Manual mode does not depend on DI1 enabling.
Manual mode has the highest priority and switches off all other control
types.
The fact that manual mode is active is recorded permanently. In other
words, it will still be active after you have switched the system off and back
on.
6.8.8.1 Manual mode
In order to set manual mode you first need to select the desired type of manual operation
from the “Mode” menu.
Manual mode off:
Manual mode is inactive.
Manual mode draining:
Manual mode has been activated, draining can be carried out by hand.
Page 65 / 104
Manual mode valve switching
Manual mode “valve switching” enables you to manually power the solenoids of the inlet and
drain valves.
(only for the basic system)
Manual mode spraying:
The heat exchanger can be sprayed manually in manual spraying mode.
(only for the professional system)
Manual mode control value:
Manual mode has been activated, the control value for switching the spraying steps is prescribed by a parameter.
Manual mode section:
Manual mode has been activated, the spraying of each section can be specifically switched on
or off.
ADVICE
The settings for manual mode are fail-safe. After switching the GHM spray off and back on, the
most recently specified manual mode is reactivated and again has higher priority than all other
control types.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 66

Manual mode GHM basic
Manual mode GHM professional
Page 66 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 67

6.8.8.2 Manual mode settings
The relevant settings for the modes selected under "Manual mode" can be defined in manual
settings mode.
Manual mode settings:
When manual mode is active, this enables you to modify either the manual control value or
the state of the relevant output.
The settings for manual mode are fail-safe. After switching the GHM spray off and back on, the
most recently specified manual mode is reactivated and again has higher priority than all other
control types.
Page 67 / 104
ADVICE
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 68

Manual mode GHM basic settings
Manual mode GHM professional settings
Page 68 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 69

6.9 Service
The Service menu is accessible only with the correct password, which is the
first thing you are asked for.
The password is 3795.
Once the password has been accepted, the Service menu appears.
The password is valid for 15 minutes and will not be requested again during
this time.
Password prompt Service menu set-up
Page 69 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 70

6.9.1 Control parameters
In this menu you configure the control parameters of the digital PID controller (proportional, integral, derivative controller).
6.9.1.1 Control parameters Kp, Ti and Td
Page 70 / 104
The Kp factor can be entered in a range from 0.1 to 10.0 to one decimal place. The Kp factor
specifies the control amplification. It is the proportion of the control path following the input
signal.
The Ti reset time changes the control value in the set time by the value specified by the proportional factor.
Example: With an unchanged control deviation (Xs) of 1K and Xp = 10 the control signal in Ti
= 25s is increased by 10%.
The delay time Td can be set in a range from 0 to 1000 seconds. The D part of the controller
does not react to the deviation but to the speed of change.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 71

6.9.2 Heat exchanger
The heat exchanger type is selected here.
6.9.2.1 Heat exchanger type
The heat exchanger type is selected here.
The selected type is displayed with a*.
Page 71 / 104
→ Select with ENTER.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 72

6.9.3 Refrigerant
A refrigerant is selected here.
6.9.3.1 Refrigerant selection
Page 72 / 104
In this menu option you can select whether
a refrigerant has been defined and whether
the display of reference and current values
with temperature should be converted accordingly, or whether no refrigerant has been
defined (bar) and the setpoints and current
values should be displayed as pressure.
The selected option is displayed with a*.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 73

6.9.4 Operating mode
The operating mode can be set in this mode.
The active mode is shown with a *.
Page 73 / 104
The individual spraying steps are activated in accordance with the control value. This control
value is generated automatically by the internal PI controlled in Auto internal and Auto external modes. The control value is pre-set externally in Slave external mode. The control principle
is illustrated in the next diagram using the example of a system with four steps.
6.9.4.1 Auto internal
In this mode, control is automatic on the basis of the setpoint defined internally. This setpoint
is entered in the Setpoints menu option.
6.9.4.2 Auto external
Operating instructions – Güntner Hydro Management GHM spray V_4.0
In this mode, control is automatic on the basis of the setpoint defined externally by the analogue input. Which input delivers the setpoint and which the actual value is defined in the IO
configuration.
© Güntner GmbH & Co. KG
Page 74

6.9.4.3 Auto external BUS
In this mode the setpoint is specified via BUS.
A Güntner Communication Module (GCM module) is required for this operating mode.
6.9.4.4 Slave external
In this mode, there is no internal control. Instead the control value on the slave input is scaled
and forwarded to the individual spraying steps. Which input is to be used as the slave input is
defined in the I/O configuration.
6.9.4.5 Slave external BUS
In this mode the control value is specified via BUS.
A Güntner Communication Module (GCM module) is required for this operating mode.
Page 74 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 75

6.9.5 Inlet control
A number of units can share the use of on-site inlet and drain valves in the
case of master-slave control. The master unit has to be configured here
such that this unit assumes control of the on-site valves.
Page 75 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 76

6.9.6 Step parameters
Here you can modify the parameters of the step generator.
6.9.6.1 Section cycling
When section cycling is active the running times of the individual spraying sections are balanced. This ensures that, on average, all the sections are subjected to the same load.
Page 76 / 104
With active section cycling there is NO 1:1 correlation between active steps and spray sections.
6.9.6.2 Threshold value
Here you can specify a threshold value for each step.
The step will then be switched active when the control value of the internal PID controller
reaches this threshold.
6.9.6.3 Off hysteresis
A hysteresis is defined to prevent a given step from being switched on and off too frequently.
This means that each stage switches off only when it reaches the corresponding threshold value minus the hysteresis.
ADVICE
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 77

6.9.6.4 Dead time
This is the time until the next higher step is switched in.
This prevents a number of steps from being switched in simultaneously.
Switching the steps back down is carried out with no hold-off time.
6.9.6.5 Minimum switch time
The minimum switch time is the shortest possible time for a section to be sprayed.
Page 77 / 104
ADVICE
6.9.7 I/O configuration
This menu item is used to configure the analogue inputs.
At the same time you can assign them selected functions.
6.9.7.1 Analogue inputs
The analogue inputs are configured by default, depending on the type of heat exchanger (condenser or dry cooler) and on whether or not the GHM has bus communication to a GMM
(Güntner Motor Management). Input AI1 is a 4-20 mA current input. Input AI3 is a current input. Input AI2 can be configured as a current input as well as a KTY resistance input. Input AI4
is a 0-10V DC input.
See Configuration table, Page 37.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 78

6.9.7.1.1 Current input AI1
No function is selected if this input is to be inactive.
Actual value 0-25bar or Actual value 0-40bar means that a pressure sensor is connected for
recording the actual value. This sensor is only required if the GHM is operated without GMM.
Page 78 / 104
Slave control value means that the control value for spraying is pre-set externally on AI1.
Setpoint 1 means that the setpoint for spraying is pre-set externally on AI1.
6.9.7.1.2 Current input AI2
Conductivity sensor means that a sensor for recording the water conductivity is configured on
AI2.
6.9.7.1.3 Switchable input AI3 (current/KTY)
Actual value GTF210 means that a temperature sensor for recording the fluid temperature
is configured on AI3. The temperature sensor is only required if a GHM is operated without
GMM.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 79

6.9.7.1.4 Voltage input AI4
No function is selected if this input is to be inactive.
Ambient temperature means that a sensor for recording the ambient temperature is config-
ured on AI4.
Slave control value means that the control value for spraying is pre-set externally on AI4.
Page 79 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 80

6.9.7.2 Digital inputs
The digital inputs on terminals DI1, DI2 and DI3 are control inputs.
In the case of a GHM without GMM, a choice can be made here as to whether the input is to
be used for enabling spraying via the fans or whether it can be used to initiate external draining. If the input is required for external draining, the enabling by the fans can also be performed in series with the general enable on DI1 . Digital input DI3 is used for switchover between the defined setpoints.
Page 80 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 81

6.9.7.3 Analogue outputs
A choice is made here as to whether the control value for the unit will be output via AO1 or
AO2 or whether the control value for the master will be output for master-slave control on a
slave unit on AO1/AO2 . If the control value is used for activating additional slave units, the
control value of the master unit should always be forwarded to the other slave units.
Likewise, AO1 and AO2 can be configured as a fault report. If the output signal exceeds 5V,
there is no fault, while a fault exists in case of a signal less than 5V.
Page 81 / 104
6.9.8 SI/IP selection
The units system can be selected here.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 82

6.9.8.1 SI/IP units system
Unit selection for pressure and temperature.
Page 82 / 104
International units →
Anglo-American units →
SI (Système international d´ unités)
IP (Imperial System)
The selected unit of measurement is marked with a *.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 83

6.9.9 Factory setting
The control can be reset to factory settings here.
6.9.9.1 Control reset (factory setting)
Page 83 / 104
ADVICE
Any changes made locally will be deleted. Factory commissioning values will be retained. The control functions are reset to their default values.
See Factory setting, Page 93
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 84

6.9.10 Delivery condition
The control can be reset to delivery condition here.
Commissioning is then not necessary.
6.9.10.1 Control reset (delivery condition)
Page 84 / 104
ADVICE
Any changes made locally and the commissioning values will be cleared. Once this function has
been completed, a completely new factory commissioning must be carried out.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 85

6.9.11 H2O conductivity
The measured H2O conductivity is displayed here.
6.9.11.1 Storage of H2O conductivity values
The conductivity of the water is measured at regular intervals. These values are stored.
Page 85 / 104
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 86

6.9.12 External bus module
If an external bus module is connected, the communication parameters for
the module in question can be set in this menu. In addition to the fieldbus
address, the baud rate and framing can also be pre-set additionally in the
case of a Modbus module.
Page 86 / 104
ADVICE
Turn off the power to the GHM + bus module after every address change. Only then will the new addresses be accepted.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 87

7 Faults and troubleshooting
7.1 General notes
Most faults that occur during commissioning are due to wiring faults or defective sensors. It
is only in the rarest of cases that the speed controller itself is defective. Check the following
points before ordering a replacement:
Status info menu:
• Is a fault displayed in the info menu? (You can always return to the Info menu by pressing X).
• If NO, then go to Test point 2.
• For other error messages see Table Error messages and warnings , Page 94
TEST POINT 2:
Mains connection:
• Are all phases present?
Sensor connection:
Page 87 / 104
• Is the sensor connected correctly? Cf "Sensor connection" section
• Sensor OK? (Measure! Pressure: 4-20mA, Temp.: 1.2-2.7kΩ, default signal: 0-10V)
• Are the sensor cables laid in the immediate vicinity of the mains or motor cable? Consider
increasing the distance!
• Are the sensor cables shielded? If not – swap for shielded cables!
• Is the shielding applied unidirectionally on the controller?
Fuses:
• Is the fuse on the controller supply OK?
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 88

8 Technical data
8.1 Component dimensions - Dimensions / Weight
Dimensions of GRCspray.1
You will find the casing dimensions below. All dimensions are given in millimetres.
Page 88 / 104
Casing dimensions of GRCspray.1
Weight:
ca. 340g
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 89

Page 89 / 104
Dimensions of GIOD.1
You will find the casing dimensions below. All dimensions are given in millimetres.
Dimensions of casing of GIOD.1
Weight:
ca. 340g
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 90

9 Electrical properties of the components
Electrical properties of GRCspray.1
Min Type Max Unit
Voltage supply 21 24 30 V
Current consumption 80 250
Digital inputs
High level 15 24 30 V
Low level -3 0 5 V
Relay outputs
Voltage DC 24 30 V
Voltage AC 250 V
Page 90 / 104
1
mA
Current resistive load 24V DC/250V
AC
Current inductive load 24V
DC/250V AC
Switch cycles, mechanical 1*10
Switch cycles, electrical 1*10
6
5
1 A
1 A
Switching cycles
Switching cycles
Voltage input
Dielectric strength -24 30 V
Measuring range 0 12 V
Resolution 10 bit
Fault 1 %
Input resistor: 230 kΩ
Current input
Dielectric strength -24 30 V
Measuring range 0 21 mA
2
Resolution 10 bit
Fault 1 %
Input resistance
(without protective circuit)
Table: Electrical properties of GRCspray.1
Operating instructions – Güntner Hydro Management GHM spray V_4.0
130
2
Ω
© Güntner GmbH & Co. KG
Page 91

Page 91 / 104
Min Type Max Unit
Voltage output
Voltage range 0 10 V
Load resistance >=100 kΩ
Resolution 10 bit
Fault 2.5 %
Short protection Yes
Potential separation No
Temperature input
Dielectric strength -24 30 V
Measuring range -30 100 °C
2
Resolution 10 bit
Precision 3 %
2
CAN bus
Dielectric strength -24 24 V
Transmission rate 125 kbit/s
Galvanic separation No
Table: Electrical properties of GRCspray.1
1. The maximum current consumption includes supplying two attached pressure transponders and one attached temperature sensor.
2. Of the appropriate range
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 92

Page 92 / 104
Electrical properties of GIOD.1
Min Type Max Unit
Power supply DC 21 24 30 V
Current consumption 100 250 mA
Digital inputs
High level 15 24 30 V
Low level -3 0 5 V
Relay outputs
Power supply DC 24 30 V
Voltage AC 250 V
Current resistive load 24V DC/250V AC 1 A
Current inductive load 24V DC/250V AC 1 A
Switch cycles, mechanical 1*10
Switch cycles, electrical 1*10
6
5
Switching cycles
Switching cycles
CAN bus
Dielectric strength -24 24 V
Transmission rate 125 kbit/s
Table: Electrical properties of GIOD.1
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 93

10 Factory setting
Page 93 / 104
Drycooler
Condenser
with refrigerant
Condenser
without refrigerant
Units SI IP SI IP SI IP
Language English
Kp 5 (Temp) / 20 (Pressure bar) / 2 (Pressure psig)
Ti 45 s (Temp) / 40 s (Pressure)
Td 0 sec.
Setpoint Depending on unit design (GPC), not saved with reset to factory settings
Manual mode Off
Manual mode control
value
Section cycling On
Thresholds
of steps
Hold-off time 1 sec.
Control value hystere-
sis
Start spraying
dep. ext. temp.
(depending on the number of steps)
Depending on the number of steps
0%
Defaults
26°C
Start spraying
(only if there is active
bus communication
to a GMM)
Hysteresis rpm 30%
Outdoor temperature
Hysteresis
Min. start-up time 15 sec.
Draining after
waiting time
Draining,
duration per section
90%
0.3 K
24 hours
30 sec.
Table: Factory setting
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 94

11 Error messages and warnings
The table shows which signal relay (ALARM, PRIO 1 or PRIO 2) is tripped with which message
on the display.
Page 94 / 104
Messages /
warnings
on the display
Display dark,
GMM spray OFF
Contact DI1
Alarm output PRIO 2
on the GMM
(only for GHM with GMM)
X
-
Displayed where?
-
Explanation:
GMM has no supply voltage
Possible cause:
Main switch off, power pack has no power supply, power pack defective,
display defective
Measure:
Check the power supply and the fuses
Displayed where?
Info menu
Explanation:
DI1 (enable) not switched (open or 0V)
Possible cause:
Enable input DI1 on the GRCspray.1 is not switched; no enable from a
higher-level controller; jumper between +24V and DI1 not in place
Measure:
Check the wiring; if appropriate check the signal from a higher-level con-
trol unit or controller
Sensor fault 1
Sensor fault 3
X
X
Table: Error messages / warnings on the display
Displayed where?
Info menu + alarm memory
Explanation:
The sensor on input AI1 is defective or the signal is out of range (4 …
20mA).
Possible cause:
Cable break, sensor not connected or defective
Measure:
Check the I/O configuration; check the connections and wiring; check the
input current, which must lie in the range 4 to 20mA, values below 2mA
will trigger the fault; replace the sensors
Displayed where?
Info menu + alarm memory
Explanation:
The sensor on input AI3 is defective or the signal is out of range (KTY).
Possible cause:
Cable break, sensor not connected or defective
Measure:
Check the I/O configuration; check the connections and wiring; replace
the sensors
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 95

Page 95 / 104
Messages /
warnings
on the display
Sensor fault 4
GIOD NOK
Alarm output PRIO 2
on the GMM
(only for GHM with GMM)
X
X
Displayed where?
Info menu + alarm memory
Explanation:
The signal is out of range (0…10V)
Possible cause:
Voltage is higher than 12V
Measure:
Check the I/O configuration; check the voltage of the power source, which
must lie between 0 and 10V. You may have +24V connected to this in-
put.
Displayed where?
Info menu + alarm memory
Explanation:
The GIOD expansion module has a fault status.
Possible cause:
No communication to GIOD, CAN connection down (cable not OK or not
plugged in, GIOD without power or defective, the rotary code switch on the
GIOD is not set to address1
Measure:
Check that the GIOD is receiving power; check the CAN connection be-
tween the controller, GRCspray.1 and the GIOD, it may be missing or
plugged incorrectly; check the cable connection; set the rotary note ID
switch on the GIOD to address1 and switch GHM spray off and back on
GIOD OK
GIOD PRE_OPERA
-
-
Table: Error messages / warnings on the display
Displayed where?
Alarm memory
Explanation:
The GIOD expansion module has started operation correctly.
Possible cause:
OK message after switching on the power supply to GMM step or after
GIOD has successfully logged itself on afresh
Measure:
None required
Displayed where?
Alarm memory
Explanation:
The GIOD expansion module has taken on CANopen status
PRE_OPERATIONAL.
Possible cause:
This is a CANopen-specific reaction from the GIOD caused by incorrect or
missing communication
Measure:
Usually no measures are necessary. If this message occurs frequently you
may have a serious disruption of the CAN connection.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 96

Page 96 / 104
Messages /
warnings
on the display
GIOD REBOOT
GIOD STOPPED
Alarm output PRIO 2
on the GMM
(only for GHM with GMM)
-
-
Displayed where?
Alarm memory
Explanation:
Because of a reboot, the GIOD expansion module has taken on CANopen
status PRE_OPERATIONAL.
Possible cause:
This is a CANopen-specific reaction from the GIOD caused by powering on
or a CAN error. The GIOD goes operational automatically.
Measure:
Usually no measures are necessary. If this message occurs frequently you
may have a serious disruption of the CAN connection.
Displayed where?
Alarm memory
Explanation:
The GIOD expansion module has taken on CANopen status STOPPED.
Possible cause:
This is a CANopen-specific status that occurs only by specific command
of the CAN master. It does not generally occur on the GHM spray.
Measure:
Usually no measures are necessary. If this message occurs frequently you
may have a serious disruption of the CAN connection.
Contact DI2
Emptying active
-
-
Table: Error messages / warnings on the display
Displayed where?
Info menu
Explanation:
DI2 (enable via fans) not switched (open or 0V)
Possible cause: Fans are not in operation Enable input DI2 on the GRC-
spray.1 is not switched; no enable from a higher-level controller; jumper
between +24V and DI2 not in place.
Measure:
Check whether the fans are working. If necessary, check the wiring or the
signal from a higher-level control unit or controller
Displayed where?
Info menu
Explanation:
The draining cycle is active. The process may take several minutes.
Measure:
None required
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 97

Page 97 / 104
Messages /
warnings
on the display
Oper. hours over
Fans OFF
System OFF
Outside: 21.2°C
System OFF
Alarm output PRIO 2
on the GMM
(only for GHM with GMM)
-
-
-
Displayed where?
Info menu
Explanation:
The permitted number of spraying hours has been exceeded.
Measure:
Check the start temperature and setpoint for spraying. The values may be
set too low.
Displayed where?
Info menu
Explanation:
The unit’s fans are not running and therefore spraying is not enabled.
Measure:
Check the speed controller or the higher-level controller.
Displayed where?
Info menu
Explanation:
The ambient temperature is lower than the starting temperature for spray-
ing.
Measure:
None required
H2O Quality NOK Displayed where?
Info menu
Explanation:
The conductivity of the water is out of range.
Measure:
Check the water treatment plant
Manual mode active Displayed where?
Info menu
Explanation:
Manual mode is active. Manual mode has top priority and switches all
other controller functions off.
Measure:
None required, or switch manual mode off.
Act val: 20.3°C
System OFF
-
Displayed where?
Info menu
Explanation:
The medium temperature or condenser temperature is lower than the set-
point.
Measure:
None required
Table: Error messages / warnings on the display
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 98

Page 98 / 104
Messages /
warnings
on the display
Act val: 22.3°C
System ON
Alarm output PRIO 2
on the GMM
(only for GHM with GMM)
-
Displayed where?
Info menu
Explanation:
The medium temperature or condenser temperature is higher than the
setpoint. Spraying is active.
Measure:
None required
Table: Error messages / warnings on the display
* There is a pause of 5 seconds between the flash codes.
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 99

12 Index
A
Actual values............................................................................................................................................................... 50
Alarm memory........................................................................................................................................................... 61
Alerts............................................................................................................................................................................... 61
Ambient temperature.............................................................................................................................................. 50
Analogue inputs................................................................................................................................................ 44, 77
Analogue outputs...................................................................................................................................................... 81
Auto external............................................................................................................................................................... 73
Auto external Bus..................................................................................................................................................... 74
Auto internal............................................................................................................................................................... 73
B
Basic menu................................................................................................................................................................. 49
Bus module................................................................................................................................................................. 55
Bus module, external.............................................................................................................................................. 86
C
Commissioning........................................................................................................................................................... 12
Commissioning menu............................................................................................................................................. 13
Conductivity................................................................................................................................................................. 51
Conductivity high...................................................................................................................................................... 60
Conductivity low........................................................................................................................................................ 59
Configurable step generator................................................................................................................................ 22
Configuration.............................................................................................................................................. 10, 37, 54
Configuration table................................................................................................................................................... 37
Connecting an external voltage sensor on AI4............................................................................................ 48
Connecting the conductivity sensor on AI2.................................................................................................. 47
Connection of a medium temperature sensor............................................................................................ 47
Connections GIOD.1................................................................................................................................................. 28
Connections GRCspray.1....................................................................................................................................... 25
Construction of the GHM spray......................................................................................................................... 17
Control inputs............................................................................................................................................................. 42
Control parameters.................................................................................................................................................. 70
Control reset (delivery condition)...................................................................................................................... 84
Control reset (factory setting)............................................................................................................................. 83
Control value............................................................................................................................................................... 50
Current input AI1...................................................................................................................................................... 78
Current input AI2...................................................................................................................................................... 78
Current input AI3...................................................................................................................................................... 78
Current input AI4...................................................................................................................................................... 79
Current input values................................................................................................................................................ 50
Current outputs on the GRCH............................................................................................................................ 41
Page 99 / 104
D
Date................................................................................................................................................................................. 64
Date setting................................................................................................................................................................. 64
Dead time..................................................................................................................................................................... 77
Delivery condition..................................................................................................................................................... 84
Delta min...................................................................................................................................................................... 58
Digital inputs...................................................................................................................................................... 80, 80
Dimensions of GIOD.1............................................................................................................................................ 89
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
Page 100

Page 100 / 104
Dimensions of GRCspray.1................................................................................................................................... 88
Display........................................................................................................................................................................... 32
Downtime...................................................................................................................................................................... 59
Drained.......................................................................................................................................................................... 53
Draining......................................................................................................................................................................... 58
E
Edit mode..................................................................................................................................................................... 35
Electrical properties of GIOD.1........................................................................................................................... 92
Electrical properties of GRCspray.1.................................................................................................................. 90
Enable - with bus communication to GMM.................................................................................................. 42
Enable – without bus communication to GMM........................................................................................... 43
Enabling........................................................................................................................................................................ 53
Enabling of fan.......................................................................................................................................................... 43
Equipment failure..................................................................................................................................................... 87
Error messages.......................................................................................................................................................... 94
External bus module............................................................................................................................................... 86
External drain..................................................................................................................................................... 43, 55
External temperature............................................................................................................................................... 50
F
Factory setting............................................................................................................................................................ 83
Fault report.................................................................................................................................................................. 59
Faults – General notes............................................................................................................................................ 87
Frost draining............................................................................................................................................................. 59
Functional description of GIOD.1....................................................................................................................... 20
Functional description of GRCspray.1............................................................................................................. 18
Fuses fault.................................................................................................................................................................... 87
G
GHM spray basic/prof............................................................................................................................................ 54
GTF210.......................................................................................................................................................................... 47
H
H2O conductivity...................................................................................................................................................... 85
H2O conductivity storage...................................................................................................................................... 85
Hardware and software versions........................................................................................................................ 55
Heat exchanger......................................................................................................................................... 54, 71, 71
Hours high................................................................................................................................................................... 59
Hysteresis rpm........................................................................................................................................................... 57
Hysteresis temp......................................................................................................................................................... 56
I
I/O configuration....................................................................................................................................................... 77
Info menu..................................................................................................................................................................... 33
Inlet control......................................................................................................................................................... 55, 75
Installation / Operating conditions GIOD.1.................................................................................................... 24
Installation / Operating conditions GRCspray.1........................................................................................... 23
L
Language...................................................................................................................................................................... 62
Language selection.................................................................................................................................................. 62
M
Manual mode..................................................................................................................................................... 65, 65
Operating instructions – Güntner Hydro Management GHM spray V_4.0
© Güntner GmbH & Co. KG
 Loading...
Loading...