

Page 1

Best.-Nr. 4495
Micro Star
4496
400 v2
Elektro-Kleinhubschrauber
für In- und Outdoorbetrieb
Best.-Nr. 4495 Vormontiertes Modell inkl. Motor,
(
Riemenantrieb
Best.-Nr. 4496 Vormontiertes Modell inkl. Motor,
(
Wellenantrieb
Warnung!
Der mit dieser Mechanik erstellte RC-Hubschrauber ist kein Spielzeug! Er ist ein kompliziertes Fluggerät, das durch unsachgemäßen Umgang schwere Sach- und Personenschäden verursachen kann.
Sie allein sind für die korrekte Fertigstellung und einen gefahrlosen Betrieb verantwortlich! Bitte beachten Sie unbedingt die beiliegenden Blätter SHW3 und SHW7 mit Sicherheitshinweisen, sie sind Bestandteil dieser Anleitung.
des Heckrotors)
des Heckrotors)
GRAUPNER GmbH & Co. KG D-73230 KIRCHHEIM/TECK GERMANY
Änderungen, Irrtümer und Druckfehler vorbehalten ID# 56502 12/05
Page 2

Micro Star 400 v2
Vorwort
MICRO STAR 400 v2 ist ein Kleinsthubschrauber mit Elektroantrieb, der bezüglich der Flugleistungen und -eigenschaften den grösseren Modellen in nichts nachsteht: Gesteuert über Kollektivpitch und eine Bell/Hiller-Mischanlenkung des Hauptrotors werden hier keinerlei Kompromisse im Steuerverhalten eingegangen zulasten der Steuerpräzision, so dass MICRO STAR
400 v2 trotz seiner geringen Grösse auch noch bei stärkerem Wind problemlos eingesetzt werden kann.
Die erreichbaren Flugzeiten pro Akkuladung hängen naturgemäss von der Justage des Modells
und vom Flugstil ab; im normalen Betrieb werden erfahrungsgemäss ca. 15 min erreicht bei
Verwendung des empfohlenen LiPo-Akkus.
Die Steuerfunktionen Rollen, Nicken und Kollektivpitch werden mechanisch gemischt, so dass
der Betrieb des Modells schon mit einer einfachen Fernsteuerung mit vier Funktionen ermöglicht wird; Motorregelung und Kollektivpitch werden dann über ein V-Kabel mit einander gekoppelt. Dennoch ist natürlich die Verwendung eines Senders mit speziellen Hubschrauberoptionen
(mc-12...mc-24) vorteilhaft.
Das leichte, stabile Chassis des Modells besteht aus Polyamid, Heckausleger und Kufen sind
aus eloxiertem Aluminium, die Streben aus CfK gefertigt.
Der Motor treibt den Hauptrotor über ein einstufiges Getriebe an, wobei auch - bei dieser Modellgrösse nicht selbstverständlich - ein Autorotationsfreilauf schon serienmässig eingebaut ist.
Das Modell wird in zwei Ausführungen geliefert, die sich durch den Heckrotorantrieb unterscheiden: Der Antrieb erfolgt entweder direkt vom Motor aus über eine kugelgelagerte Kohlefaserwelle oder über einen Zahnriemen.
Hinweis
Rümpfe, wie z.B. Best.-Nr. 4461, „A119 KOALA“.
Die Lieferung des MICRO STAR 400 v2 erfolgt in einem Karton mit Tragegriff, der später auch
zum Transport und zur Aufbewahrung des flugfertigen Modells (mit abgenommenen Hauptrotorblättern) dienen kann.
Technische Daten
: Die Ausführung mit Riemenantrieb ist nicht geeignet für den Einbau in geschlossene
Länge ohne Rotor ca. 580 mm
Höhe ca. 205 mm
Breite o.Rotor ca. 90 mm
Hauptrotor- Ø 630 mm
Heckrotor- Ø 140 mm
Fluggewicht ab ca. 520 g
Übersetzung Hauptrotor 13,2:1
Übersetzung Heckrotor 4:1
2
Page 3

Micro Star 400 v2
Warnhinweise
Das aus diesem Bausatz betriebsfertig aufgebaute Modell ist kein harmloses Spiel-
•
•
• •
zeug! Es kann durch mangelhaften Aufbau und/oder unsachgemäße oder fahrlässige
Handhabung beim Betrieb zu schweren Sach- und Personenschäden führen.
Ein Hubschrauber hat zwei im Betrieb schnell drehende Rotoren mit einer hohen
•
•
• •
Drehenergie. Alles, was dabei in die Drehebene der Rotoren gelangt, wird zerstört
oder zumindest stark beschädigt - also auch Gliedmaßen! Bitte extreme Vorsicht walten lassen!
Gelangt ein Gegenstand in die Drehebene der laufenden Rotoren, so wird nicht nur
•
•
• •
dieser, sondern auch die Rotorblätter beschädigt. Teile davon können sich lösen, was
zu einer extremen Unwucht führt, wodurch der gesamte Hubschrauber in Mitleidenschaft gezogen und unberechenbar wird.
Störungen der Fernsteuerungsanlage, hervorgerufen beispielsweise durch Fremdstö-
•
•
• •
rungen, Ausfall eines Bauteils oder durch leere bzw. defekte Stromquellen, lassen einen Modellhubschrauber ebenfalls unberechenbar werden: Er kann sich ohne Vorwarnung in jede beliebige Richtung bewegen.
Ein Hubschrauber besitzt eine große Anzahl von Teilen, die einem Verschleiß unter-
•
•
• •
worfen sind, beispielsweise Getriebeteile, Motor, Kugelgelenke usw. Eine ständige
Wartung und Kontrolle des Modells ist daher unbedingt erforderlich. Wie bei den
„großen“ Vorbildern üblich, muß auch am Modell vor jedem Start eine
"Vorflugkontrolle" durchgeführt werden, bei der evtl. entstandene Mängel erkannt und
rechtzeitig beseitigt werden können, bevor sie zu einem Absturz führen.
Diesem Bausatz liegen zwei weitere Einlegeblätter - SHW3 und SHW7 - mit Sicher-
•
•
• •
heitshinweisen und Warnungen bei: Bitte unbedingt lesen und beachten, sie sind Teil
dieser Anleitung!
Dieser Modellhubschrauber darf nur von Erwachsenen oder Jugendlichen ab 16 Jah-
•
•
• •
ren unter Anleitung und Aufsicht von sachkundigen Erwachsenen gebaut und betrieben werden.
Es besteht Verletzungsgefahr durch scharfe Spitzen und Kanten.
•
•
• •
Gesetzliche Auflagen, insbesondere bezüglich einer ggf. erforderlichen Aufstiegser-
•
•
• •
laubnis, sowie die fernmelderechtlichen Bestimmungen für den Betrieb der Fernsteuerungsanlage müssen unbedingt beachtet werden. Der Abschluß einer Haftpflichtversicherung für den Modellflug ist gesetzlich vorgeschrieben.
Ein Hubschraubermodell muß so transportiert werden (z.B. zum Fluggelände), daß
•
•
• •
daran keine Beschädigungen entstehen können. Besonders gefährdet sind dabei die
Steuergestänge am Hauptrotor und der gesamte Heckrotor.
Einen Modellhubschrauber zu steuern ist nicht einfach; zum Erlernen dieser Fähigkeit
•
•
• •
ist Ausdauer und ein gutes optisches Wahrnehmungsvermögen erforderlich.
Vor der Inbetriebnahme des Modells ist es unerläßlich, sich intensiv mit der Materie
•
•
• •
"Modellhubschrauber" auseinanderzusetzen. Dies sollte sowohl durch Fachliteratur
3
Page 4

Micro Star 400 v2
erfolgen, als auch praktisch, z.B. durch Zuschauen auf Modellflugplätzen mit Helikopterbetrieb, in Gesprächen mit anderen Modellhelikopterpiloten oder durch den Besuch
einer Modellflugschule. Auch der Fachhandel hilft Ihnen gern weiter.
Diese Anleitung unbedingt vor dem Zusammenbau vollständig lesen. Erst mit dem
•
•
• •
Bau beginnen, wenn die einzelnen Baustufen und deren Reihenfolge klar verstanden
worden sind!
Änderungen des Aufbaus bei Verwendung anderer als in der Anleitung empfohlener
•
•
• •
Teile dürfen nicht vorgenommen werden, es sei denn, Sie haben sich von Qualität,
Funktionstüchtigkeit und Eignung dieser anderen Zubehörteile überzeugt.
Da Hersteller und Verkäufer keinen Einfluß auf einen sachgerechten Aufbau und ord-
•
•
• •
nungsgemäßen Betrieb des Modells haben, wird ausdrücklich auf diese Gefahren hingewiesen und jegliche Haftung abgelehnt.
Haftungsausschluß / Schadenersatz
Weder die Einhaltung der Montage- und Betriebsanleitung in Zusammenhang mit dem
Modell, noch die Bedienung und Methoden bei Installation, Betrieb, Verwendung und
Wartung der Fernsteuerungsanlagen können von der Firma Graupner überwacht werden.
Daher übernimmt die Fa. Graupner keinerlei Haftung für Verluste, Schäden oder Kosten,
die sich aus der fehlerhaften Verwendung und dem Betrieb ergeben oder in irgendeiner
Weise damit zusammenhängen.
Soweit vom Gesetzgeber nicht zwingend anders vorgeschrieben, ist die Verpflichtung
der Fa. Graupner zur Leistung von Schadenersatz, gleich aus welchem Rechtsgrund, begrenzt auf den Rechnungswert der an dem schadenstiftenden Ereignis unmittelbar beteiligten Warenmenge der Fa. Graupner. Dies gilt nicht, soweit die Fa. Graupner nach zwingenden gesetzlichen Vorschriften wegen Vorsatz oder grober Fahrlässigkeit unbeschränkt haftet.
4
Page 5

Inhaltsübersicht
Micro Star 400 v2
Vorwort
•
Warnhinweise
•
Zubehör, zusätzlich benötigte Artikel
•
1. Montage, Einbau der Fernlenkanlage
•
2. Einstellarbeiten
•
3. Endkontrolle vor dem Erstflug
•
4. Einstellungen beim Erstflug, Spurlauf-Einstellung
•
5. Wartung, Montage des Modells aus Einzelteilen
•
6. Allgemeine Vorsichtsmaßnahmen
•
7. Einige Grundbegriffe des Hubschrauberfliegens
•
..........................................
.....................................
....................
...................
..................................
......................
...................
........
...........
...........
S.2
S.3
S.6
S.7
S.11
S.13
S.14
S.15
S.23
S.23
Hinweise zu dieser Anleitung
Damit das Helikoptermodell später einwandfrei und sicher geflogen werden kann, wurde diese
Anleitung mit hohem Aufwand erstellt. Es wird nicht nur vom Anfänger, sondern in gleichem
Maße vom Experten unbedingt erwartet, die Fertigstellung Schritt für Schritt exakt so vorzunehmen, wie es nachfolgend beschrieben wird.
Die Fertigstellung erfolgt anhand von Abbildungen, die mit erklärenden Texten versehen
•
sind.
Sämtliche Zahnräder und Lager sowie die Gelenke sind sorgfältig zu fetten bzw. zu ölen.
•
Die Ersatzteilzusammenstellung befindet sich am Ende der Anleitung.
•
5
Page 6

Micro Star 400 v2
Zubehör
Empfohlenes Zubehör für Micro Star 400
Fernlenkanlage siehe Graupner-Hauptkatalog
Es wird empfohlen eine mit speziellen Hubschrauberoptionen ausgestattete Fernlenkanlage
oder eine Microcomputer-Fernlenkanlage wie z. B. mc-12, mc-15, mc-19, mc/mx-22 oder mc24 zu verwenden.
Servos:
Micro-Servo C 121
Best.-Nr. 5106
Gyrosystem
Pico-Gyro-System PIEZO NT-312G
Best.-Nr. 5951
Drehzahlsteller:
PICO SC 20
Best.-Nr. 7160
oder
PICO 25
Best.-Nr. 7172
Antriebsakku:
LiPo 1500
Best.-Nr. 7635.3BEC
:
6
Page 7
Micro Star 400 v2
1. Montage
Die Mechanik des Micro Star 400 besteht zum grossen Teil aus glasfaserverstärktem Polyamid,
einem Material, das gegenüber beispielsweise Aluminium im Einsatzbereich Modellhubschrauber erhebliche Vorteile bietet, wie hohe Masskonstanz bei geringem Gewicht, Ermüdungsfreiheit, geräuscharmer Lauf und Absorbtionsfähigkeit von Vibrationen des Antriebs.
Da das Modell komplett vormontiert geliefert wird, beschränkt sich die Fertigstellung auf den
Einbau der Fernsteuerungskomponenten und des Flugakkus.
In jedem Fall ist die korrekte Montage des Modells anhand der Anleitung zu überprüfen; auch
die exakte Justage des Getriebes und der Anlenkungen ist vom Modellflieger selbst vorzunehmen.
Wichtig:
Vor Beginn aller weiteren Arbeiten ist zunächst die Leichtgängigkeit des Antriebs sicherzustellen.
Wellenantrieb
Zunächst die Schrauben lösen, welche das Heckrotorgehäuse auf dem Heckrohr festklemmen,
und den Heckrotor so verschieben, dass sich ein nur ganz geringes Zahnflankenspiel ergibt
zwischen den Kegelrädern auf Antriebs- und Heckrotorwelle. Dann die Klemmschrauben wieder
festziehen und dabei darauf achten, dass die Heckrotorwelle waagerecht verläuft.
Dann die Klemmschrauben lösen, welche den Heckausleger vorn am Chassis fixieren. Den
Heckausleger so verschieben, dass sich ein gerade wahrnehmbares Zahnflankenspiel ergibt
zwischen dem Kronenrad des Heckrotorantriebs und dem Motorritzel; dann Klemmschrauben
wieder festziehen. Abschliessend auch die Befestigungsschrauben des Motors lösen und anschliessend wieder festziehen, damit sich der Motor zwischen Hauptzahnrad und Heckrotorantrieb setzen kann.
Riemenantrieb
Überprüfen, dass der Zahnriemen gespannt ist, aber dennoch leichtgängig läuft.
:
:
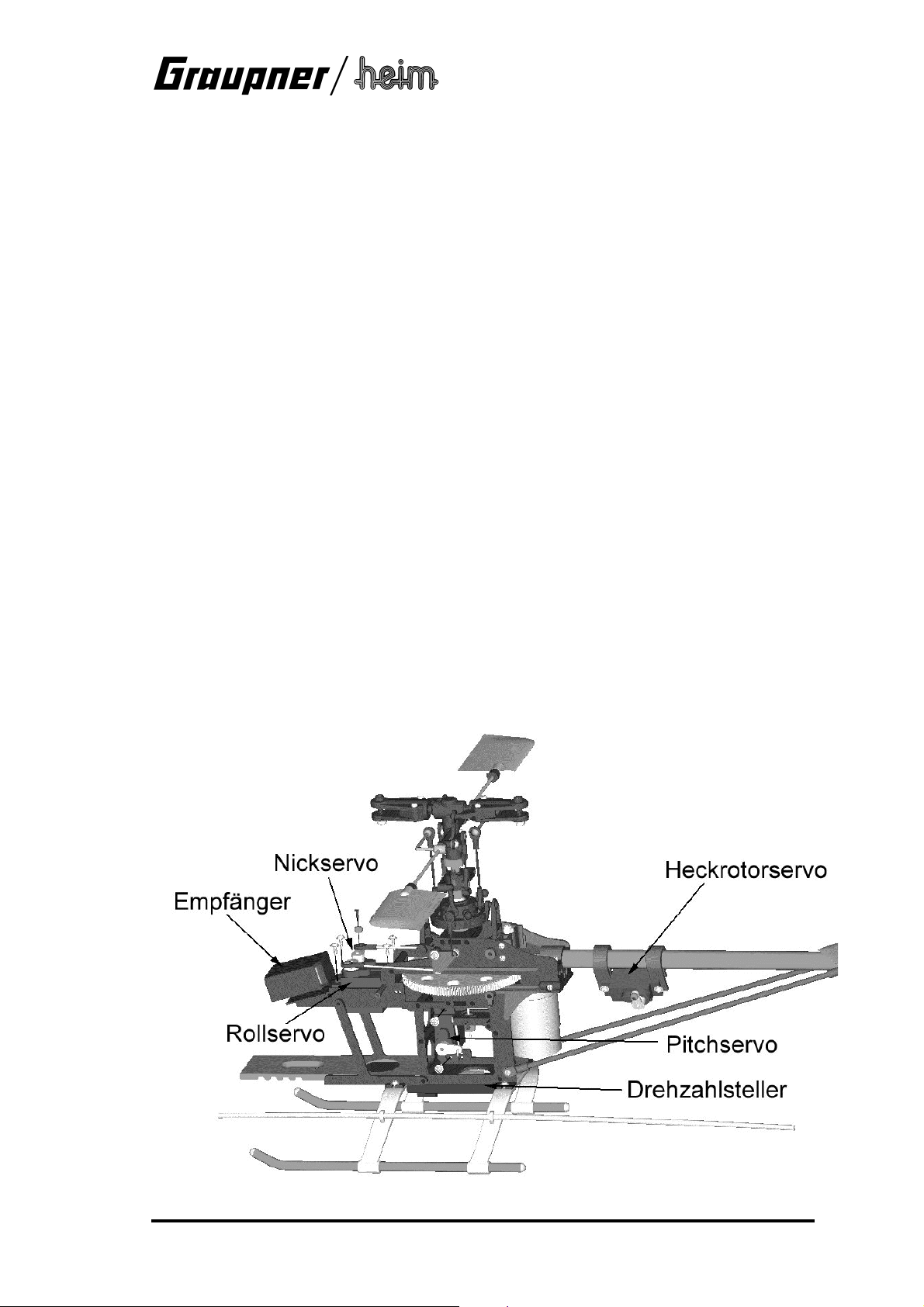
1.1 Einbau der Fernsteuerungskomponenten
Die Anordnung der Fernsteuerungskomponenten geht aus der Abbildung hervor:
Die Servos werden mit den ihnen beiliegenden Schrauben im Chassis befestigt wie abgebildet.
7
Page 8
Micro Star 400 v2
Die Anlenkgestänge für Taumelscheibe, Pitch und Heckrotor werden gemäss in die Steuerhebel
der Servos eingehängt.
Wichtig:
Vor dem Aufsetzen der Servohebel müssen die Servos in Neutralposition stehen!
Dazu Servos gemäss Anleitung der Fernsteuerung an den Empfänger anschliessen, Empfänger
mit Strom versorgen, Sender und Empfänger einschalten und alle Steuerknüppel und Trimmungen in Mittelstellung bringen.
Die Grundeinstellung für den Kollektivpitchbereich erfolgt durch Verschieben des durch die
Hauptrotorwelle nach oben führenden Gestänges, nachdem die Klemmschraube an der Steuerwippe gelöst wurde. Das Gestänge so verschieben, dass bei Servomittelstellung und horizontaler Position der Wippe die Blätter einen Einstellwinkel von 0...3° aufweisen.
8
Page 9
Micro Star 400 v2
Das Heckrotorservo ist so zu verschieben, dass bei Neutralposition des Servos der HeckrotorSteuerhebel genau rechtwinklig zum Heckausleger steht.
9
Page 10

Micro Star 400 v2
Der Drehzahlsteller wird gemäss der ihm beiliegenden Anleitung mit dem Motor verbunden; dabei sind die Kabel möglichst kurz zu halten. Besonders ist darauf zu achten, dass die Zuleitungen der am Motor angelöteten Entstörkondensatoren keinen Kurzschluss gegen das Motorgehäuse verursachen.
Die Verbindung zum Antriebsakku, der auch die Empfangsanlage über das BEC-System im
Drehzahlsteller versorgt, erfolgt über eine Steckverbindung, die so anzuordnen ist, dass sie
auch bei aufgesetzter Kabinenhaube gut zugänglich ist, weil sie den EIN- und AUS-Schalter für
die Empfangsanlage ersetzt und als Ladebuchse für den Akku dient.
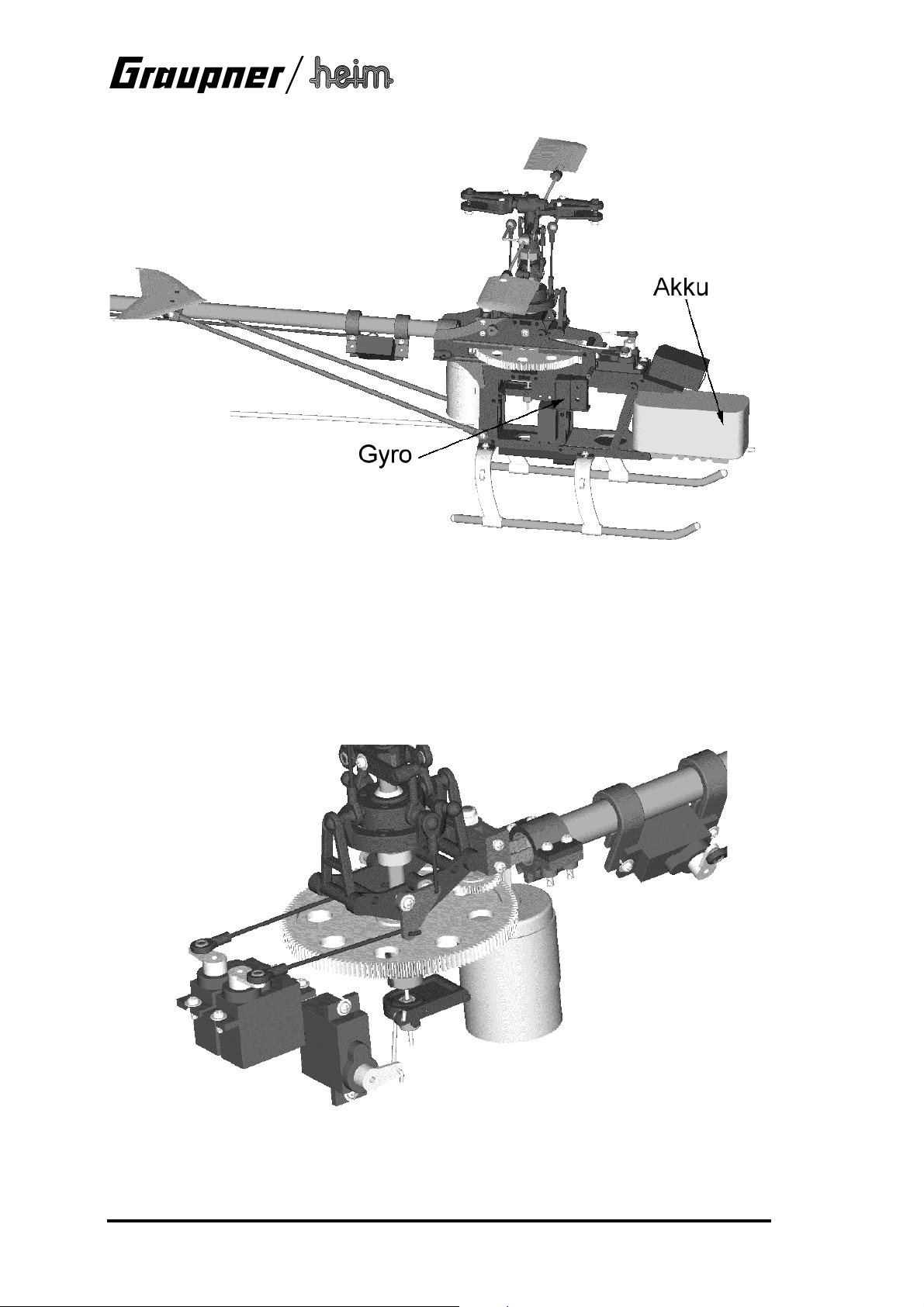
Der Antriebsakku wird gemäss Abbildung vorn/unten im Chassis befestigt; dabei ist er so zu
verschieben, dass sich mit aufgesetzter Kabinenhaube die korrekte Schwerpunktlage (direkt
unter der Hauptrotorwelle) ergibt. Abschliessend alle Kabel so zusammenfassen, dass die
Kabinenhaube aufgesetzt werden kann.
10
Page 11

Micro Star 400 v2
2. Einstellarbeiten
2.1 Einstellen der zyklischen Steuerung
Die Grundeinstellung von Roll-und Nicksteuerung sollte bereits korrekt sein, wenn die Gestänge
gemäß Anleitung montiert wurden. Da die Einhängepunkte der Gestänge an den Servohebeln
vorgegeben sind, werden die Einstellungen der Servowege später über die elektronischen Einstelloptionen am Sender vorgenommen.
2.2 Hauptrotor-Pitcheinstellung
Die Pitcheinstellwerte werden mit der Einstellwinkellehre (im Bausatz enthalten) gemessen. Die
folgenden Tabelle enthält Anhaltswerte; die tatsächlich erforderlichen Werte hängen von den
verwendeten Rotorblättern und vom Modell ab.
Minimum Schwebeflug Maximum
Schwebeflug und Training -1° 3°...4° 7°
Kunstflug -7° 0° 7°
Autorotation -1° 3° 8°
Die Pitcheinstellungen werden am besten im Sender vorgenommen wie folgt:
1. Schwebeflug-Pitch messen und korrekt einstellen
2. Pitch-Maximum und -Minimum messen und über die Pitchkurveneinstellung des Senders
justieren gemäß den nachfolgenden Diagrammen
11
Page 12

Micro Star 400 v2
2.3 Einstellen Motorsteuerung
Die nachfolgenden Diagramme zeigen mögliche Motor-Steuerkurven:
Die Leistungskurve „normal“ eignet sich sowohl für den Schwebeflug als auch für Rundflüge.
•
Da bei der Leistungskurve „Kunstflug“ der Motor in keiner Stellung des Pitchsteuerknüppels
•
zum Stillstand kommt, darf auf diese Kurve nur im Fluge umgeschaltet werden.
Die oben angegebenen Werte hängen stark ab vom verwendeten Motor; sie müssen daher
•
durch praktische Versuche angepaßt werden.
2.4 Weitere Einstellungen
Wenn alle Gestängeverbindungen gemäß den vorausgegangenen Bauabschnitten hergestellt
worden sind, können die nachfolgenden Einstellungen am Sender vorgenommen werden:
1. Servolaufrichtungen
Den Drehsinn aller Servos entsprechend den Angaben in der Anleitung einstellen. Besondere Aufmerksamkeit dabei auf den Drehzahlsteller richten!
2. Dual-Rate
Für Roll-, Nick- und Heckrotorsteuerung können umschaltbare Ausschlaggrößen eingestellt
werden. Als Grundeinstellung hierfür wird die Umschaltung jeweils von 100% auf 75%
empfohlen.
3. Exponentialfunktion
In der Grundeinstellung auf linearer Steuerkennlinie belassen.
4. Servoweg-Mittenverstellung
Keine Einstellungen zu diesem Zeitpunkt vornehmen. Kleinere Korrekturen können damit
später durchgeführt werden.
5. Servoweg-Einstellung
Hiermit können die maximalen Servowege eingestellt werden, wobei darauf zu achten ist,
daß die Einstellungen nach beiden Richtungen auf die gleichen Werte eingestellt werden;
andernfalls ergibt sich eine unerwünschte Differenzierung der Ausschläge:
12
Page 13

Micro Star 400 v2
Das Pitchservo sollte einen Blattteinstellwinkelbereich von -8° bis +9° ansteuern können bei
symmetrischen Ausschlägen; ggf. muss der Servo-Steuerhebel gelöst und um einen Zahn
versetzt wieder festgeschraubt werden. Bei der Grundeinstellung ergibt sich für die Mittelstellung des Pitchsteuerknüppels (Schwebeflugpunkt) ein Pitchwert von ca. 3°, wobei der
Motorsteller halb geöffnet ist.
Hinweis:
Pitch- und Leistungkurven werden später entsprechend den praktischen Anforderungen eingestellt. Wenn jedoch schon in der Grundeinstellung differenzierte Ausschläge, wie in
Abb.“B“ oben gezeigt, eingestellt werden, erschwert das diese späteren Abstimmungen!
6. Pitch- und Leistungskurve
Diese Einstellungen sind von elementarer Wichtigkeit für die Flugleistung eines Hubschraubers. Ziel dieser Abstimmung ist es, daß sowohl im Steig- als auch im Sinkflug die Rotordrehzahl konstant bleibt, unabhängig von der Belastung. Das stellt dann eine stabile Basis
dar für die weiteren Abstimmungen, z.B. des Drehmomentausgleichs usw. (siehe auch
„Pitch- und Gaskurven“).
7. Statischer Drehmomentausgleich
Zum Ausgleich der Drehmomentänderungen bei Betätigung der Pitchsteuerung wird das
Heckrotorservo über einen Mischer im Sender mit der Pitchfunktion gekoppelt. Der Mischanteil kann bei den meisten Sendern für Steig- und Sinkflug separat eingestellt werden.
Empfohlenen Werte für die Grundeinstellung: Steigflug: 35%, Sinkflug: 15%
8. Gyroeinstellung
Gyrosysteme dämpfen unerwünschte Drehungen um die senkrechte (Hoch-) Achse, indem
sie diese selbständig erkennen und entsprechend in die Heckrotorsteuerung eingreifen.
Dazu wird die Gyroelektronik zwischen Heckrotorservo und Empfänger geschaltet.
Die beim Micro Star 400 empfohlenen Gyrosysteme besitzen entweder einen Einstellregler
für die Wirkungsstärke; anfangs wird dieser Einstellregler zunächst auf 50% Wirkung
eingestellt, oder die Gyrowirkung kann vom Sender aus über einen zusätzlichen Kanal
eingestellt werden (siehe Anleitung des Gyrosystems).
Darauf achten, daß die Wirkungsrichtung des Gyros korrekt ist, er also auf eine Bewegung
des Heckauslegers mit einem Heckrotor-Steuerausschlag in die entgegengesetzte Richtung
reagiert. Ist das nicht der Fall, so wird jede Drehung des Modells durch den Gyro noch
verstärkt! In diesem Fall muss das Gyrosystem auf dem Kopf stehend montiert werden,
sofern dafür kein Schalter vorhanden ist.
Bei allen Gyrosystemen kann die optimale Einstellung erst im Flug ermittelt werden, da
hierauf unterschiedliche Faktoren einwirken.
Ziel der Einstellung ist es, eine möglichst hohe Stabilisierung durch den Gyro zu erreichen,
ohne daß es durch eine zu hohe Einstellung der Gyrowirkung zu einem Aufschwingen
(Pendelbewegungen des Heckauslegers) des Modells kommt.
3. Endkontrolle vor dem Erstflug
Wenn der Zusammenbau des Modells abgeschlossen ist, sollten die folgenden Überprüfungen
vor dem Erstflug durchgeführt werden:
Gehen Sie dieses Handbuch noch einmal durch und stellen Sie sicher, daß alle
•
Aufbauschritte korrekt durchgeführt wurden.
Stellen Sie sicher, daß alle Schrauben in den Kugelgelenken und den Lagerböcken nach
•
Einstellen des Getriebe-Zahnflankenspiels richtig festgezogen sind.
Können sich alle Servos frei bewegen, ohne mechanisch anzulaufen? Stimmen alle
•
Drehrichtungen? Sind die Befestigungsschrauben der Servo-Steuerhebel festgezogen?
Überprüfen Sie die Wirkungsrichtung des Kreiselsystems
•
Stellen Sie sicher, daß Sender- und Flugakkus voll geladen sind.
•
Erst wenn alles, wie oben beschrieben, überprüft wurde, kann der erste Startversuch
durchgeführt werden.
13
Page 14

Micro Star 400 v2
4. Einstellungen beim Erstflug
Spurlaufeinstellung
„Spurlaufeinstellung“ beschreibt einen Einstellvorgang, bei dem die Einstellwinkel der Hauptrotorblätter auf genau die gleichen Werte gebracht werden, so daß die Blätter im Betrieb exakt in
der selben Ebene laufen.
Ein nicht korrekter Spurlauf, bei dem die Blätter in unterschiedlichen Ebenen laufen, hat
starke Vibrationen des Modells im Fluge zur Folge.
Bei der Spurlaufeinstellung mindestens 5 Meter Sicherheitsabstand zum Modell halten!
Bei der Spurlaufeinstellung muß erkannt werden, welches Blatt höher und welches tiefer läuft.
Dazu werden die Blätter mit farbigem Klebeband markiert:
Hierbei gibt es zwei Möglichkeiten. Abb.“A“ zeigt die Verwendung von unterschiedlichen Farben
an den beiden Blättern; in Abb.“B“ wird die gleiche Farbe verwendet, doch wird das Klebeband
in unterschiedlichem Abstand vom Blattende angebracht.
Vorgehensweise bei der Spurlaufeinstellung:
1. Wenn der Hubschrauber kurz vor dem Abheben ist, genau seitlich in die Rotorebene sehen.
2. Wenn die Rotorblätter in der selben Ebene laufen, ist keine Einstellung erforderlich; wenn
jedoch ein Blatt höher als das andere läuft, muß die Einstellung korrigiert werden.
3. Die Einstellung erfolgt durch Verdrehen der Kugelgelenke der Gestänge zwischen
Pitchkompensator und Mischhebeln: Gelenke herausdrehen, um das Blatt höher laufen zu
lassen, hineindrehen, um es tiefer einzustellen.
14
Page 15

Micro Star 400 v2
5. Wartung
Hubschrauber, ob groß oder klein, stellen hohe Ansprüche an die Wartung. Auftretende Vibrationen schnellstmöglich beseitigen oder verringern! Rotierende Teile, wichtige Schraubverbindungen, Gestänge, Anlenkungspunkte sind vor jedem Flug zu überprüfen. Falls Reparaturen
erforderlich werden, sind nur Original-Ersatzteile zu verwenden. Beschädigte Rotorblätter keinesfalls reparieren, sondern durch neue ersetzen.
Das Modell wird vormontiert geliefert, so dass bei der Fertigstellung keine speziellen Kenntnisse
über den Aufbau des Modells erworben werden.
Für Wartungs- und Reparaturarbeiten wird nachfolgend der Aufbau des Modells aus Einzelteilen beschrieben.
5.1 Montage des Modells aus Einzelteilen
Die beiden Kugellager der Hauptrotorwelle einsetzen und die beiden Chassishälften mit den zugehörigen Blechschrauben fest zusammenschrauben.
Den Akkuhalter 4441.326 einsetzen und mit dem Chassis verschrauben, ebenso die Befestigung für den Heckausleger: Bei der Ausführung mit Zahnriemen obere und untere Hälfte, bei
Wellenantrieb nur die obere.
Das Freilauflager in das Hauptzahnrad 4441.23 einpressen (auf Laufrichtung achten!), dann die
Freilaufhülse einschieben, wie gezeigt, und schliesslich die Einheit in das Chassis einsetzen.
15
Page 16

Micro Star 400 v2
Gemäss Abbildung die Nickwippe, den Roll- und den Pitchhebel montieren und sicherstellen,
dass sich alles leichtgängig bewegen lässt; ggf. die Schrauben „M“ ½ Umdrehung lösen.
Nur bei Riemenantrieb:
In den Lagerbock des Zahnriemenantriebs 4441.329 die beiden Lager eindrücken, dann die
vordere Riemenscheibe 4441.333 wie abgebildet einsetzen und mit Stopmutter sichern. Die
Einheit dann in die Führungsschienen im Chassis einschieben und verschrauben.
16
Page 17

Micro Star 400 v2
Den Hauptrotorkopf mit Wippe (4441.65) zusammen mit den übrigen Teilen wie Blatthalter
4441.61, Blattlagerwelle 4441.66, Mitnehmer 4441.368 Pitchkompensator 4441.332 und Hauptrotorwelle 4441.22 entsprechend der Abbildung zu einer Einheit zusammensetzen. Auf
Leitchtgängigkeit der Hebel und Gelenke achten. Unter Umständen müssen dazu die Schrauben „N“ ½ Umdrehung gelöst werden.
Das Gleitstück „P“ für die Pitchsteuerung mit der Bohrung nach unten in den Pitchkompensator
und den Schlitz der Hauptrotorwelle einschieben. Dann das Pitchsteuergestänge 4441.334 mit
dem Gewinde voran von unten in die Hauptrotorwelle einschieben und ca. 7 Umdrehungen in
das Gleitstück „P“ einschrauben. Auf Leichtgängigkeit prüfen und ggf. durch leichtes Verdrehen
des Mitnehmers 4441.368 erreichen.
Entsprechend der Abbildung die Paddelstange mit Steuerhebeln 4441.62 sowie den
Paddeladaptern 4441.364 und den Hillerpaddeln 4441.63 montieren. Paddelstange genau mittig
im Rotorkopf montieren.
Taumelscheibe 4441.31 auf die Hauptrotorwelle aufschieben, dann die Gestänge 4441.391 auf
korrekte Länge bringen und einhängen.
17
Page 18

Micro Star 400 v2
Einen der beiden Stellringe auf die Hauptrotorwelle aufschieben und die gesamte Einheit von
oben in die Kugellager im Chassis und durch das Hauptzahnrad stecken. Unten den zweiten
Stellring aufschieben und bündig mit dem unteren Ende der Hauptrotorwelle festschrauben.
Dann die Welle bis zum Anschlag nach oben ziehen und den oberen Stellring am oberen Kugellager anliegend festziehen.
Das Pitchgestänge in das Klemmstück des Pitchhebels einstecken und mit der Klemmschraube
so fixieren, dass der volle Steuerweg symmetrisch zur Mittelstellung des Hebels genutzt werden
kann. Schliesslich die Taumelscheibenanlenkungen in die Taumelscheibe einhängen.
Den Antriebsmotor 4441.21 von unten in das Chassis einsetzen und mit den zugehörigen
Schrauben befestigen. Das Kufenlandegestell aus den Teilen 4441.305 und 4441.306
zusammensetzen und mit Blechschrauben am Chassis befestigen. Kufenrohre 4441.306
ausrichten und mit kleinen Blechschrauben oder Cyanokleber in den Kufenbrücken 4441.305
fixieren.
18
Page 19

Micro Star 400 v2
Die Kugellager 4441.46 in die Halbschalen des Heckrotorgehäuses 4441.347 eindrücken, die
Heckrotorwelle 4441.344 einsetzen und die beiden Gehäusehälften verschrauben, nachdem der
Zahnriemen 4441.317 eingehängt wurde. Dann den Umlenkhebel 4441.343 und die Steuerbrücke 4441.42 montieren.
Die Heckrotorblatthalter 4441.41 werden mit jeweils einer M2-Schaube befestigt, auf die zunächst je ein Kugellager aufgeschoben wird. Die Schrauben werden in die Nabe 4441.45 eingedreht und fixieren diese gleichzeitig auf der Heckrotorwelle, in dem sie auf zwei gegenüberliegende Flächen der sechskantigen Welle treffen und gut festgezogen werden.
19
Page 20

Micro Star 400 v2
Auf das Heckauslegerrohr 4441.310 die beiden Befestigungsschellen 4441.311 und die Servohalter 4441.308 aufschieben, dann Höhen- und Seitenflosse 4441.04 auf die Schellen schrauben. Den Zahnriemen durch das Rohr ziehen (dabei nicht verdrehen) und den Heckrotor auf
das Rohrende aufstecken. Heckrotorblätter 4441.02 gemäss Abbildung in den Blatthaltern montieren, sie müssen sich noch leichtgängig schwenken lassen.
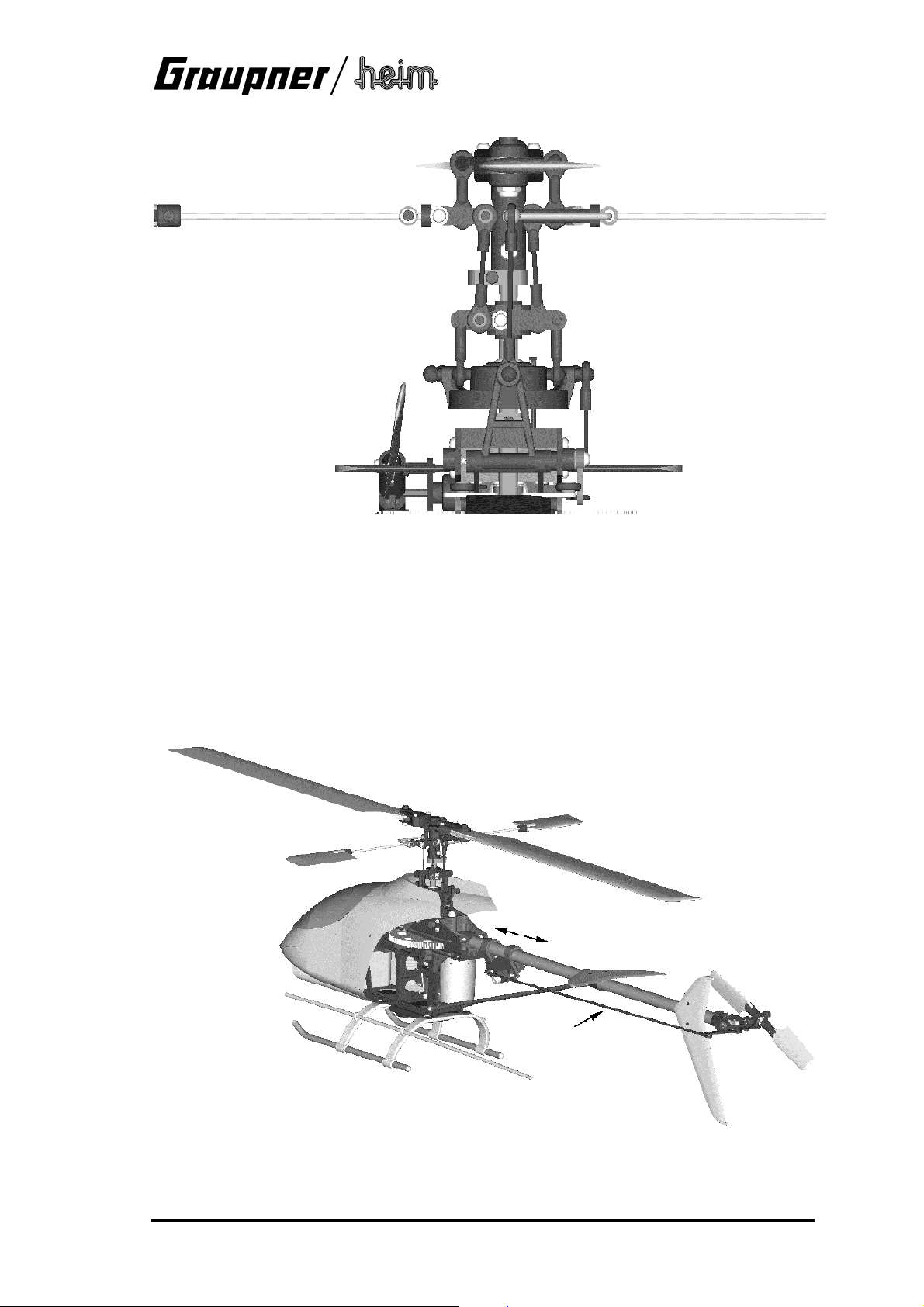
Den Heckausleger gemäss nachfolgender Abbildung montieren:
Lagerbock mit vorderer Riemenscheibe nach Entfernen der vier Befestigungsschrauben aus
dem Chassis herausnehmen.
Obere Hälfte der Heckrohrbefestigung so weit lösen, dass der Heckausleger eingeschoben
werden kann (1).
Zahnriemen in der abgebildeten Richtung um 90° drehen (2).
Riemenscheibe in den Zahnriemen einhängen und die Heckrotor-Antriebseinheit wieder ins
Chassis einbauen (3).
Heckrohr so weit nach hinten schieben, dass der Zahnriemen gespannt ist, dann die Schrauben
der Heckrohrbefestigung festziehen (4).
20
Page 21

Micro Star 400 v2
Die beiden Heckstreben 4441.307 montieren wie abgebildet. Das Antennenführungsrohr durch
die Halter in den Kufenbrücken stecken.
Die Montage der Rotorblätter und das Aufsetzen der Kabinenhaube erfolgt dann nach dem
Einbau der Fernsteuerungskomponenten, der weiter vorn beschrieben wird.
Option: Antrieb des Heckrotors über eine CfK-Welle:
Aus dem Kugellagersatz 4441.316 das Lager ohne Bund ungefähr in der Mittte des Heckrohres
4441.310 fixieren. Dazu entweder beidseits des Lager das Heckrohr von aussen vorsichtig ankörnen, oder das Lager in das Rohr einkleben.
Das hintere Kugellager mit dem Bund zum Kegelrad weisend und an diesem anliegend auf die
Antriebswelle 4441.312 aufkleben. Nach Aushärten des Klebers die Welle in das Heckauslegerrohr und durch das mittlere Lager einschieben, bis das hintere Lager bis zum Anschlag (Bund)
im Heckrohr sitzt, dann das vordere Lager ebenfalls bis zum Anschlag eindrücken. Das Kronenrad 4441.314 auf das vordere Ende der Welle aufstecken, gegen das vordere Lager drücken
und mit der Stiftschraube fixieren.
21
Page 22

Micro Star 400 v2
Zur Befestigung des Heckauslegers im Chassis wird nur der untere Teil der Halterung
verwendet, der jetzt als Oberteil verwendet wird; unten liegt das Rohr direkt auf dem Chasssis
auf, wodurch es die korrekte Position zum Motorritzel erhält.
Hinweis:
Das Heckrohr liegt tiefer im Chassis, als bei Riemenantrieb, so dass das Kronenrad nur oben in
das Motorritzel eingreift:
Im Heckrotorgetriebe wird anstelle der Welle 4441.344 (mit Riemenscheibe) die Welle 4441.444
(mit Kegelrad) montiert.
22
Page 23

Micro Star 400 v2
6. Allgemeine Vorsichtsmaßnahmen
Eine Haftpflichtversicherung abschließen.
•
Nach Möglichkeit Mitglied in einem Modellflugverein und -verband werden.
•
Auf dem Flugfeld:
Mit Modellen keine Zuschauer überfliegen.
•
Modelle nicht in der Nähe von Gebäuden oder Fahrzeugen betreiben.
•
Mit Modellen keine Landarbeiter im Gelände überfliegen.
•
Modelle nicht in der Nähe von Eisenbahnlinien, Hauptverkehrsstraßen oder Freileitungen
•
betreiben.
Vor- und während der Flüge:
Vor Einschalten des Senders sicherstellen, daß nicht bereits ein anderer Modellflieger die
•
selbe Frequenz benutzt.
Reichweitentest mit der Fernsteuerung durchführen.
•
Prüfen, ob Sender- und Flugakku voll geladen sind.
•
Modell nicht außer Sichtweite geraten lassen.
•
Kontrollen nach dem Flugbetrieb
Das Modell reinigen. Dabei auf festen Sitz aller Schrauben achten, ggf. nachziehen.
•
Verschlissene und beschädigte Teile rechtzeitig ersetzen.
•
Sicherstellen, daß die Elektronikkomponenten wie Akku, Empfänger, Kreisel usw. noch
•
sicher befestigt sind (Befestigungsgummiringe altern und reißen dann!).
Empfangsantenne überprüfen. Kabelbrüche im Inneren der Litze sind oft von außen nicht
•
direkt sichtbar!
Nach Bodenberührung des laufenden Hauptrotors Rotorblätter austauschen, da Brüche im
•
Inneren oft von außen nicht erkennbar sind.
Modell nicht am Heckausleger tragen: Beim festen Zugreifen wird leicht das Heckrotor-
•
Steuergestänge verbogen.
7. Einige Grundbegriffe des Hubschrauberfliegens
Die Bezeichnung Drehflügler sagt bereits, daß die auftriebserzeugenden Tragflächen sich beim
Hubschrauber drehen; daraus ergibt sich unter anderem, daß beim Hubschrauber keine
Mindestgeschwindigkeit erforderlich ist, er also in der Luft stehen kann.
Zyklische Rotorblattverstellung
Die zyklische Blattverstellung dient der Richtungssteuerung um die Quer- und Längsachse. Ein
Steuerkommando bewirkt an jedem Umlaufkreispunkt eine andere Blatteinstellung. Die Neigung
der Taumelscheibe ergibt bei dem vorliegenden System die Flugrichtung.
Kollektive Rotorblattverstellung (Pitch)
Sie dient der Steuerung in Richtung der Hochachse, also zum Heben und Senken. Beide
Rotorblätter werden gleichzeitig um den gleichen Betrag in ihrer Anstellung verändert.
Drehmomentausgleich
Der drehende Rotor erzeugt ein Moment, das versucht, den ganzen Hubschrauber in
entgegengesetzter Richtung zu drehen. Dies muß genau ausgeglichen werden, was durch
Blattverstellung des Heckrotors geschieht. Mit dem Heckrotor wird gleichzeitig die Richtung um
die Hochachse gesteuert.
Schwebeflug
Dies ist der Zustand, in dem der Helikopter, ohne sich nach einer Richtung zu bewegen, an
einer Stelle verharrend fliegt.
23
Page 24

Micro Star 400 v2
Bodeneffekt
Dieser tritt vom Boden aus abnehmend bis in eine Höhe auf, die etwa 1 - 1 1/2
Rotordurchmesser entspricht. Er kommt dadurch zustande, daß der sich drehende,
normalerweise frei abfließende Rotorluftstrahl auf ein Hindernis (dem Boden) auftrifft und ein
"Luftpolster" bildet. Im Bodeneffekt kann ein Hubschrauber mehr Gewicht hochheben, dagegen
nimmt die Lagestabilität ab, so daß er um so mehr nach irgendeiner Seite "ausbrechen"
möchte.
Steigflug
Die überschüssige Kraft, die nicht zum Schwebeflug benötigt wird, kann zum Steigflug
ausgenützt werden. Dabei benötigt der senkrechte Steigflug mehr Energie, als der schräge mit
Vorwärtsbewegung. Aus diesem Grund ist bei gleicher Motorleistung beim schrägen Steigflug
schnelleres Steigen möglich.
Horizontalflug
Beim Horizontalflug mit etwa halber Höchstgeschwindigkeit benötigt ein Hubschrauber seine
geringste Antriebsleistung. Wurde er beim Schwebeflug exakt ausgetrimmt, dann ergibt sich
beim Vorwärtsflug eine Kurve. Dies ergibt sich aus folgender Tatsache: Auf der nach vorn
drehenden Rotorseite ergibt sich durch die zusätzliche Windanströmgeschwindigkeit ein
höherer Auftrieb, als er auf der nach hinten drehenden Rotorseite, wo diese
Anströmgeschwindigkeit abgezogen werden muß. Somit ergibt sich eine Seitenneigung des
Hubschraubers.
Sinkflug
Ist die Rotordrehzahl des Hubschraubers relativ gering und erfolgt der senkrechte Abstieg eines
Hubschraubers zu schnell, dann strömt nicht mehr genügend Luft durch den Rotor, es bildet
sich das sogenannte "Wirbelringstadium" und die Strömung am Blattprofil reißt ab. Dieser
unkontrollierte Zustand kann zum Absturz führen. Ein schnelles Sinken ist deshalb nur mit
entsprechender Vorwärtsbewegung oder schnell drehendem Rotor möglich. Aus demselben
Grund ist beim Wenden des Hubschraubers vom Flug gegen den Wind zum Flug mit dem Wind
Vorsicht geboten.
Schlagbewegung der Rotorblätter
Damit sich die Rotorebene beim Vorwärtsflug nicht so stark neigt, baut man in den Rotorkopf
das sogenannte Schlaggelenk ein. Das schneller angeströmte Blatt kann nach oben, das
langsamer angeströmte geringfügig nach unten ausweichen, um so den Auftriebsunterschied zu
mindern. Bei Modellen hat sich das für beide Blätter gemeinsame Gelenk bewährt.
Autorotation
Unter Autorotation versteht man den motorlosen Flugzustand, bei dem der Hauptrotor mit
negativer Blatteinstellung durch die beim Sinkflug anströmende Luft auf hoher Drehzahl
gehalten wird. Die so gespeicherte Drehenergie läßt sich beim Abfangen des Hubschraubers
durch Blattverstellung (positiv) in Auftrieb umsetzen. Dies ist natürlich nur einmal möglich.
Dadurch ist sowohl ein Original wie auch ein Modellhubschrauber fähig, beim Motorausfall
sicher zu landen.
Diese Autorotationslandung stellt jedoch an den Piloten sehr hohe Anforderungen in Bezug auf
Schätz- und Reaktionsvermögen; er kann nur einmal den Sinkflug abfangen, und dies darf
weder zu früh, noch zu spät erfolgen. Deshalb ist dazu viel Übung erforderlich.
24
Page 25

Best.-Nr. 4495
4496
Micro Star
400 v2
Ersatzteil-
Übersicht
Stand 12/2005
GRAUPNER GmbH & Co. KG D-73230 KIRCHHEIM/TECK GERMANY
Änderungen, Irrtümer und Druckfehler vorbehalten ID# 56502 12/05
Page 26

Ersatzteile
Micro Star 400 v2
Graupner
Best.-Nr.
4441.01 Hauptrotorblatt, Kunststoff 2
4441.02 Heckrotorblatt, Kunststoff 2
4441.303 Kabine mit Verglasung 1
4441.04 Höhen - und Seitenflosse je 1
4441.305 Kufenbrücke 2
4441.306 Kufenrohr, Alu, schwarz 2
4441.307 Heckstrebe, CfK 2
4441.308 Heckrotorservohalter, Kunststoff 2
4441.310 Heckausleger, Alu, schwarz 1
4441.311 Befestigungsschelle, Kunststoff, 10mm 2
4441.312 Heckantriebswelle m. Kegelritzel, CfK 1
4441.314 Kronenritzel C, Kunststoff 2
4441.15 Motorritzel, Ms, 10 Zähne 1
4441.316 Kugellagersatz Heckrotor-Antriebswelle (3St) 1
4441.317 Zahnriemen für Heckrotorantrieb 1
4441.320 Mechanik-Chassis V2 1
95168 Kugellager für Hauptrotorwelle, 5x10x4 1
4441.21 Antriebsmotor m. Ritzel 1
4441.22 Hauptrotorwelle, Alu 1
4441.23 Hauptzahnrad 1
4441.24 Nabe mit Freilauf 1
4441.325 Umlenkhebelsatz Nick 1
4441.326 Akkuhalter, Alu 1
4441.329 Lagerung Heckrotorantrieb (Riemen), mit Lagern 1
4441.30 Umlenkhebelsatz Roll, Pitch 1
4441.31 Taumelscheibe 1
4441.332 Pitchkompensator 1
4441.333 Heckrotorantrieb (Riemen) 1
4441.334 Pitchgestänge 2
Bezeichnung Abmessung
[mm]
ben./Ers.P.
Stück
4441.41 Blatthalter (Heckrotor) 2
4441.42 Steuerbrücke kpl. 1
4441.343 Umlenkhebel 1
4441.344 Heckrotorwelle mit Riemenscheibe 1
4441.444 Heckrotorwelle mit Kegelritzel 1
4441.45 Heckrotornabe 1
4441.46 Kugellager 2
4441.347 Heckrotorgehäuse (10 mm) 1
4441.61 Blatthalter (Hauptrotor) 2
4441.62 Paddelstange mit Steuerhebeln 1
4441.63 Hillerpaddel 2
4441.364 Paddeladapter 2
4441.65 Rotorkopf-Zentralstück mit Wippe 1
4441.66 Blattlagerwelle 1
4441.67 Kugellager 1
4441.368 Mitnehmer f. Pitchkompensator, Alu 1
4441.90 Schraubensatz 1
4441.391 Gestänge- u. Kugelgelenksatz 1
2
Page 27

Optionsteile
Micro Star 400 v2
Graupner
Best.-Nr.
4441.101 Hauptrotorblatt, CfK 2
4441.201 Hauptrotorblatt, GfK 2
4441.102 Heckrotorblatt, CfK 2
4441.105 Trainingslandegestell 1
4441.410 Heckausleger, CfK 1
4441.420 Mechanik-Chassis, CfK/Alu 1
4441.122 Hauptrotorwelle, Stahl 1
4441.125 Umlenkhebelsatz Nick, Alu 1
4441.130 Umlenkhebelsatz Roll, Alu 1
4441.131 Taumelscheibe, Alu 1
4441.132 Pitchkompensator, Alu 1
4441.160 Hauptrotorkopf-Zentralstück m. Wippe, Alu 1
4441.161 Hauptrotor-Blatthalter, Alu, mit Lagern 2
4441.163 Hillerpaddel, CfK 2
Bezeichnung Abmessung
[mm]
Stück
ben./Ers.P.
3
Page 28

Notizen
Micro Star 400 v2
4
 Loading...
Loading...