

Gnom Baby, M-3-050-02, M-3-050-01 Operator's Manual

Underwater
remotely operated vehicle
GNOM BABY
Operators manual
VFTECH s.r.o.
Vapenicka 24, 971 01 Prievidza, Slovakia
Tel/Fax +421 46 54264 56
odbyt@vftech.sk
http://www.vftech.sk
2015
v05/2016
2
TABLE OF CONTENTS
1. Description 3
1.1 Purpose 3
1.2 Design 4
1.3 Technical specifications 6
2. User’s manual for operation with GNOM 7
3. Keys and Buttons at the control panel 12
4. Screen modes 15
5. Calibration 16
6. Maintenance operation 17
7. Safety requirements 18
8. Warranty statement 19
9. Examples of linking modules 20
10. Appendix 21
11. Annex 26
v05/2016
3
1. DESCRIPTION
1.1 PURPOSE
LIST OF ABBREVIATIONS:
Underwater module
Surface control module
Hand reel
Coaxial cable
Joystick
Digital video recorder
Computer
Monitor
Waterproof case
ROV Gnom Baby is intended for inspection of underwater objects such as wrecks, ship
underwater parts, propellers and different underwater constructions.
ROV Gnom Baby has a small color camera with tilt function. Two clusters of ultra-bright
LEDs are installed at both sides of the underwater module. The module has horizontal and
vertical thrusters which allow the movement of underwater module in all directions. The
underwater module is operated from the surface control module and is linked with it by
umbilical cable . The operator controls the underwater module by joystick according
to video and data from sensors on the TV screen . Maximum operation depth is 50 m.
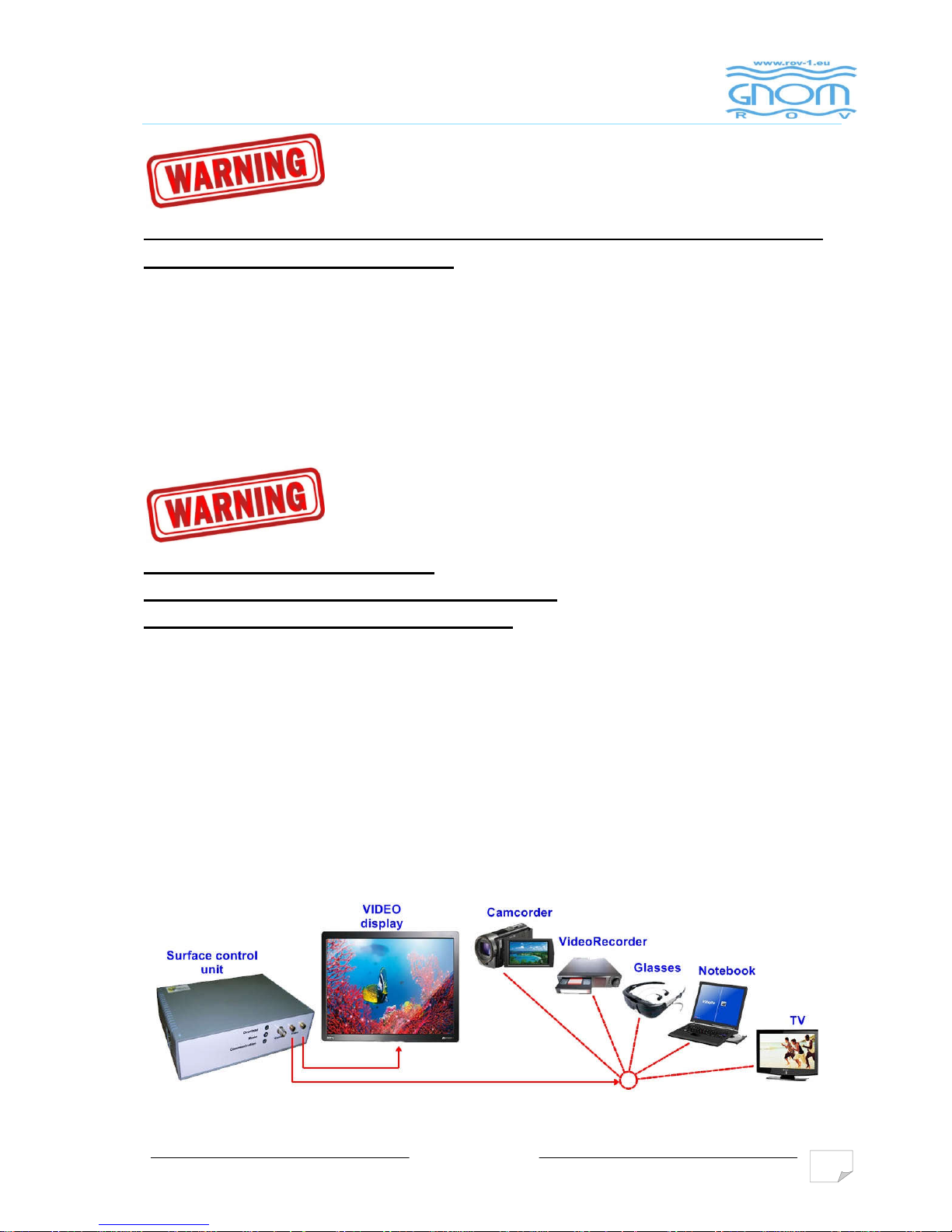
The video signal from surface control module can be connected to monitor , TV receiver
or video recorder (if delivered) via standard AV cable. At surface controle module there
are two output connectors with video signal, what allows connect at the same time two display
units, or one display unit and a video recorder.
The power supply of surface control module is 110-230VAC 50Hz or 12-24VDC from battery with
inverter 12VDC/230VAC can be used. Maximum power consumption is 200 Watt. Battery
operation time (12 Ah) is more than 1 hour.
The complete system can be integrated into two plastic cases. One case contains the underwater
module and cable reel with cable , the other contains control module , joystick
and accessory equipment (monitor, video recorder - if delivered).
The size of operating area is limited by cable length (35 m in basic set). It is possible to increase
the cable length up to 75 m. The video camera together with lights provides 15-20 m daylight
visibility in transparent water. Maximum 3-4 m visibility can be reached during the night.
LCD display ot videorecorder can be installed upon request.
For update info please visit our web site www.vftech.sk

v05/2016
4
1. DESCRIPTION
1.2 DESING
Recommended configurations
Hand reel +
Coax. cable
Underwater module
Power supply/control module
Joystick
Transportation waterprof cases
LCD

The system consists of underwater vehicle, cable and
contains aluminum waterproof cylindrical hull
thruster
.
A glass dome
front part of the vehicle. Two
hull. The plastic
floatation block
the end of thrusters’ axis. All the electronic parts (the power supply converter, electronic m
and depth sensor) are installed into main cylindrical hull. Communication tether is placed at the
back roof of the hull together with depth sensor membrane.
There are protective plastic feet
of the vehicle using additional metal weights.
Thrusters are DC motors and located inside waterproof hulls. The rotation transmission to
the screw propeller performed with an aid of disk magnetic coupling. One disk is fastened at the
motor’s
shaft inside the thruster’s hull and another one at the screw propeller’s shaft inside the
cone-
shaped cap filled up with water. The cone
user for cleaning.
v05/2016
1. DESCRIPTION
–
with a side wall
with a color camera based on a 1/3” CCD matrix locates at the
horizontal thrusters
with lighters
are fastened to the main
fastened by nut and screw
.
Screw propellers are installed at
under the vehicle that are used to adjust for the
-
shaped cap can twisted off (with an effort) by a
5
with a fastened vertical
odule
buoyancy
v05/2016
6
1. DESCRIPTION
The vehicle is connected with the operator’s module via thin coaxial cable which transmits power
voltage (48V), operation commands, data from all sensors and video-signal.
The plastic cable reel with a moving lift point allows to reel in/out the cable during the
operation. The cable is strengthened by the Kevlar threads and the additional polyethylene shield.
The central cable core has 48V voltage. The power supply module has the short circuit
protection.
Surface module is mounted in a separate case and consists of power supply module,
control module and joystick. LCD display and battery 12V/7(12Ah) can be added to the basic set
of equipment upon request. Module has standard RCA jack for connecting to TV or audio/video
recorder.
Using the control pads and joystick the operator can move GNOM forward-backward, turn
to the right-left, up-down; adjust the thruster’s speed and the lighters’ brightness. All the data are
displayed in TV-text mode. By pressing one of the bottoms on the joystick the operator can pass
to the menu of tuning up some vehicle’s functions such as calibrating of the depth sensor.
1.2 TECHNICAL SPECIFICATION
3 magnetically coupled thrusters
Operation time - 500 h
Speed: - horizontal – up to 1 m/sec
vertical - up 0,3 m/sec
Operation depth – 50 m, ( can be modified up to maximum depth – 100 m)
Cable length max. – 75 m
Cable is strengthened by the Kevlar threads and the additional polyethylene shield,
negatively buoyant
Cable diameter –4.2 mm, breaking effort – 90 kg
Two clusters of ultra-bright LEDs
Color camera PAL CCD 1/3", 720 TV Lines, 0.1 lux
Power supply and surface control unit
Power supply – 230VAC or 12-24VDC battery 12V/7(12Ah)
Voltage value is displayed on a screen
Operating environment humidity – up to 100%
Operating temperature range – -5 …+ 45º. С.
Complete system is packed in two high-performance waterproof STORMCASE
ROV weight – 1.7 kg, full weight of system – 8 kg
Vehicle dimensions 210х185х150 mm
Depth sensor (sensibility 10 – 20 cm) with TV-text overlay on a screen, autodepth mode
Compass with TV-text overlay on a screen, autoheading mode
Vehicle has slight positive buoyancy, adjusting by adding metal weights
v05/2016
7
2. USER’S MANUAL FOR OPERATION
The central cable wire has 48V voltage! If any damages happened you
must repair or change the cable
2.1. Before using, please, check up all parts of vehicle especially propellers, cable and dome.
Clean the vehicle if necessary, check propeller rotation.
2.2. Adjust the buoyancy of the vehicle if necessary adding additional weights on the plastic feet
(Note that cable weight in water is approximately 2 g/m)
2.3. Plug in 3-sockets connector to reel and video cable to monitor video input. If you work from
230 VAC, connect AC power cable.
Do not rotate thrusters on air!
Do not switch lights on a full power on air!
Be very careful with the cable, do not:
Stand on it
Press on it
Twist it
2.4. If use any additional display or audio/video recorder, please, connect video cable to RCA
jack of additional video device
v05/2016
8
2. USER’S MANUAL FOR OPERATION
2.4.1 - You can not connect to the GNOM and other devices (accessory) to the
mains with the following problems:
• Wrong - incorrect wire connections L and N conductors in the appropriate slot.
• without protective earthing conductor.
Note. Checking the correct wiring connections (phase conductor - L) inspects the
operator. (E.g. by phase tester)
2.4.2 Checking the RCD
Carry out before any underwater operation at the new location as follows:
• If the requirements of paragraph 2.4.1 are met and connect to the power supply
only power module
• Switch on mains voltage button on the control panel
• After 5 seconds press the "TEST" button on the residual current device. It would
immediately lead to a safe shutdown of module
• Switch off the mains voltage button on the control panel. Switch on the current
circuit breaker
• Again switch on the power supply button on the control panel. Residual current
device must remain switched on.
2. USER’S MANUAL FOR O
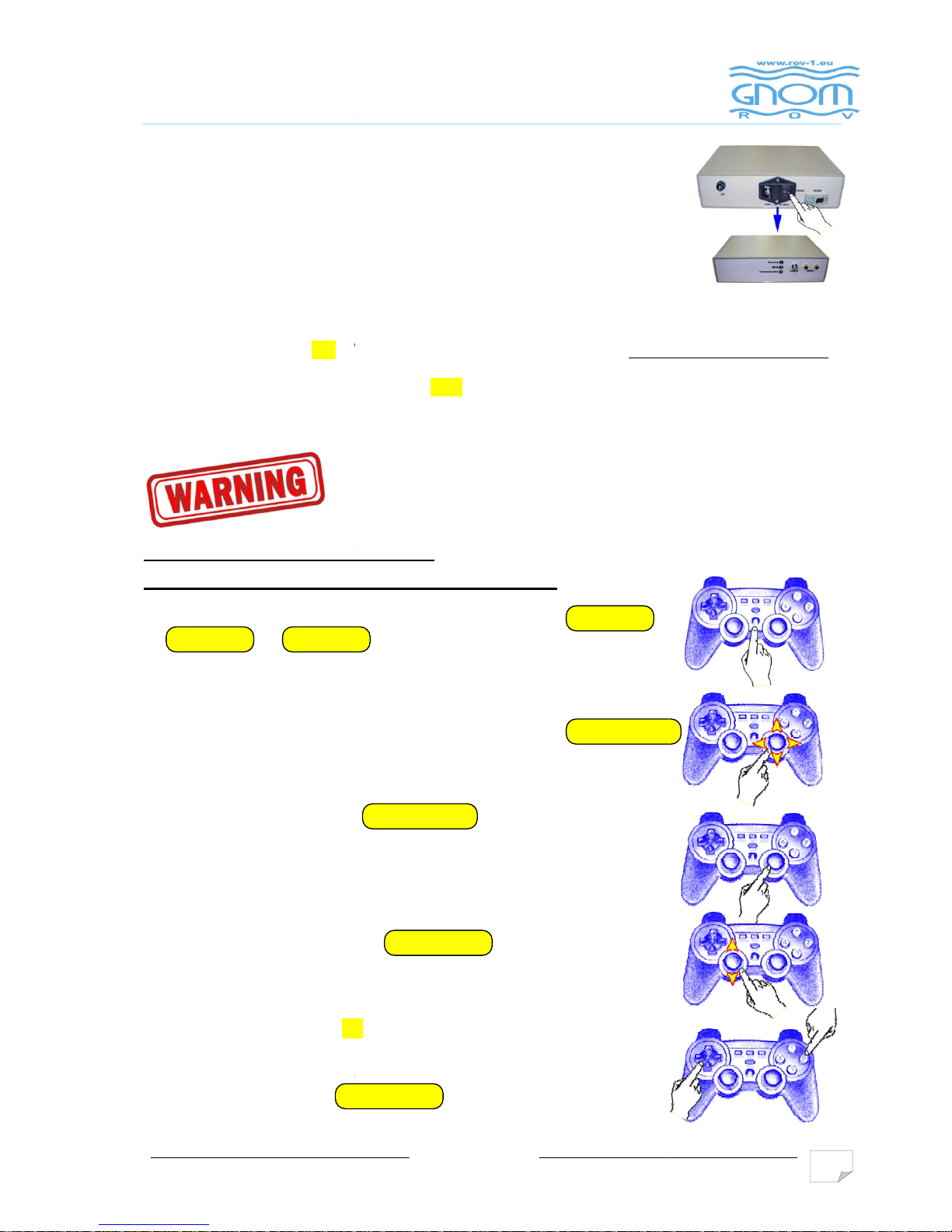
2.5. Power supply from 2
3
Set switch 230V ON
(UP position)
2.6.
If use LCD display switch on its power supply separately. Brightness,
contrast and color saturation can be adjusted manually (see the user’s
manual LCD display).
For monitor operation (TV) follow manual to the
appropriate monitor.
2.7. After switch power ON “
WELCOME
After
finish operation set switch 230V in
2.8. Operation
Do
not rotate thrusters on air!
Do not switch lights on a full power on air!
Put the vehicle into the water. To start operation press key
or on a joystick
All control functions are
displayed on a console draw (see below).
# To move vehicle
Forward/Back
# Slow mode (SLOW).
Press
(25%, 50%, 75%, 100%)
You can adjust
speed gradually (128 grades) pressing the joystick. The
direction and speed are indicated on an overlay.
# To move vehicle Up/Down
use
# Jump mode - Also press
②
A
llows to push vehicle slightly for a distance 30
chose the jump direction press arrows (
adjust the jump power use
left joystick
HOME
MODE
v05/2016
0V
WELCOME
” is displayed on monitor.
Gnom is ready for operation
OFF position
or
and turn Right/Left use
and adjust power gradually
.
to adjust the Jump mode.
– 50 cm them stop. To
Left/Right, Up/Down). To
.
left joystick
right joystick
right
joystick
ANALOG
9
.
 Loading...
Loading...