


G-Mouse GPS接收器
WGM-100U
使用者手冊
Ver 1.0 R2
目錄
第一章 產品資訊 ………………………………3
第二章 產品特色 ………………………………4
第三章 技術規格 ………………………………5
第四章 注意事項 ………………………………7
第五章 快速使用 ………………………………8
第六章 操作特性 ………………………………9
第七章 驅動程式 …………………………… 11
第八章 軟體介面 …………………………… 19
第九章 疑難排解 …………………………… 25
第一章 產品資訊
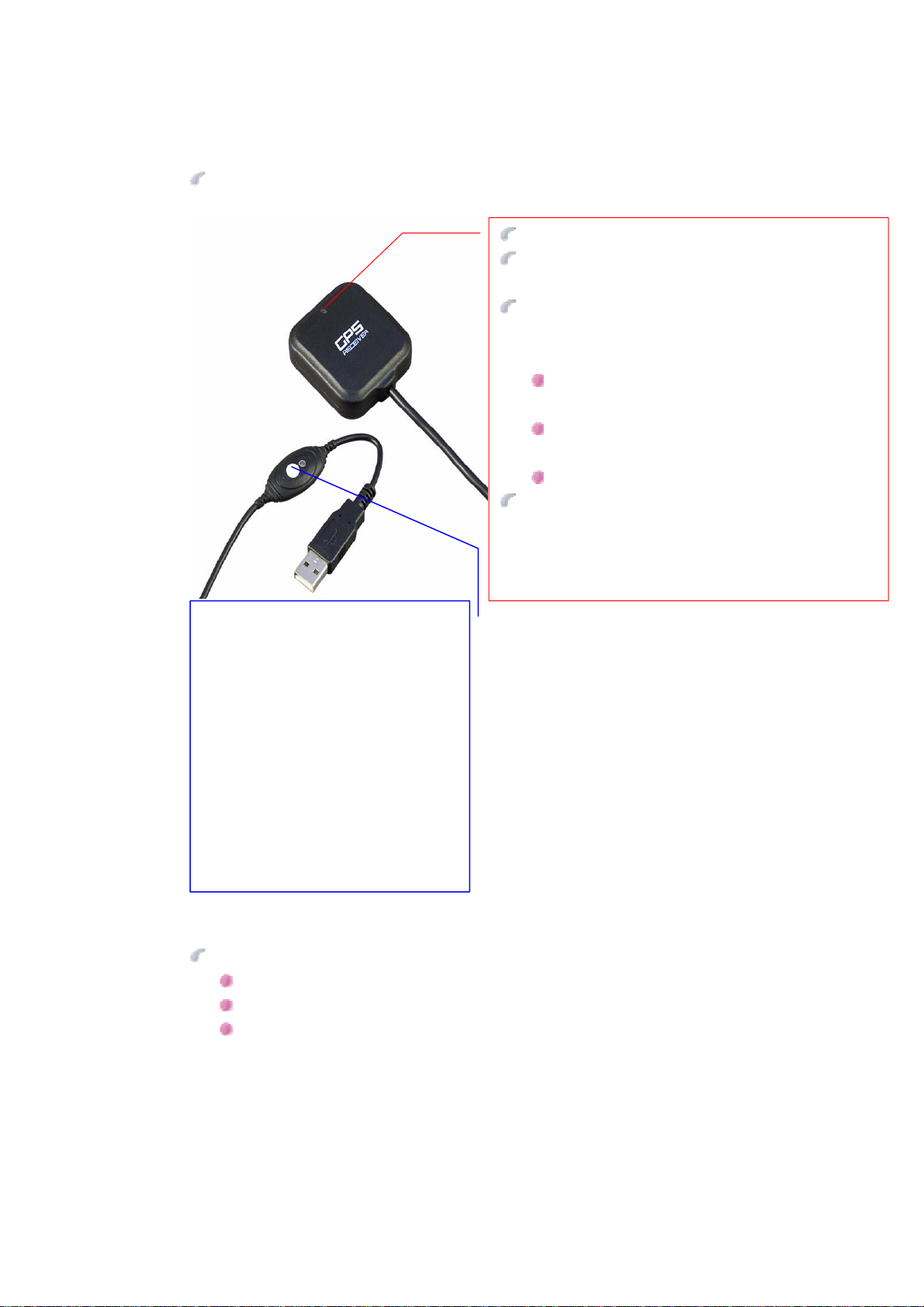
外觀說明
GPS 模式(尚未定位):紅燈恆亮
GPS 模式(定位成功): 紅燈閃爍(1 秒暗 1 秒
亮)
電子羅盤模式:紅燈快速閃爍與 GPS 模式定
位成功的紅燈閃爍頻率有所區隔,可輕易分
辨出目前在何種模式
最慢的閃爍頻率為 0.25 秒暗/0.25 秒亮
(離磁北較遠)
最快的閃爍頻率為 0.04 秒暗/0.04 秒亮
(離磁北較近)
恆亮表示處於正磁北
校準電子羅盤模式:紅燈熄滅表示正處於校
準電子羅盤模式,再按模式切換鍵即可離
開,當校準成功後會進入電子羅盤模式,若
失敗則進入 GPS 模式
短按:GPS 模式與電子羅盤模式
切換(若在校準電子羅盤模式,
則會離開校準電子羅盤模式,校
準成功會由校準電子羅盤模式
後會進入電子羅盤模式,校準失
敗則進入 GPS 模式)
長按:進入校準電子羅盤模式
※僅 WGM-100 的產品方有此按
鍵
WGM-100U編號說明
WGM:產品型號 表示此型號為G-MOUSE
100:功能區分 表示具備電子羅盤與軌跡記錄功能
U:代表輸出輸入介面是使用電腦通用序列匯流排(USB)
第二章 產品特色
WGM-100U衛星接收器(以下簡稱WGM-100) ,是一個完整的衛星定位接收機。內
建衛星接收天線,衛星接收核心採用最先進的 (iTrax 03)並整合電子羅盤
(Compass),相互輔助校正方位(本公司專利),提供您縱使在因低速而造成
GPS方向飄移的同時,所使用的導航軟體電子地圖也不會胡亂轉動,使得電子地
圖與道路能穩定的緊密配合,故也能滿足工業級定位的嚴格要求與個人使用需
要。而且除了導航之外,您也可以用來記錄你所行走的軌跡。適用範圍從汽車
導航、保全系統、地圖製作、各種調查到農業用途等。藉由USB 介面使其與其
它電子設備連結與溝通,內建非揮發記憶體儲存衛星資料,如衛星訊號狀態、
上次使用的最後的位置及時間。其耗電量極低,且能同時追蹤12顆定位衛星的
訊號。
使用最先進的衛星定位核心iTrax 03(第3代定位核心),並使用高性能的中
央處理器(ARM7TDMI CPU)。
快速定位及追蹤12顆衛星的能力。
內建WAAS/EGNOS解調器,不需額外硬體即可接收WAAS/EGNOS信號。
支援 NMEA0183 3.0版本輸出資料格式。
內建電子羅盤並使用本公司專利電子羅盤與GPS方向相互校正技術。
在電子羅盤模式下可以直接指出北方的功能。
在NMEA輸出中整合羅經方向,使得導航的電子地圖能更穩定的呈現。
軌跡記錄功能,像一個黑盒子般記錄位置、日期與時間,只需供給它電源即
可。
提供軌跡讀取與設定WGM-100U的工具程式(G-Tool),讓使用者能輕易的與
WGM-100U溝通。
WGM-100U內部系統核心程式可以升級,使用者可免費獲得新的功能。
具備防水功能。
彈性設計,容易和汽車導航,航海導航,車隊管理,AVL,個人導航,追蹤
系統和地圖服務業等結合。

第三章 技術規格
一般規格
工作晶片:u-Nav + iTrax 第三代超省電型超高精度晶片。
衛星頻率通道數:同時可接收及追蹤 12顆衛星訊號。
接收衛星頻率:1575.42 MHZ。
接收碼:L1, C/A 碼。
敏感度:-152dBm
定位時間(平均時間)
重新抓取: 0.1秒。
快速啟動(Quick Start): < 3 秒 ( 在 < 25分鐘未收到衛星信號 )。
冷開機:40 秒。
暖開機:38 秒。
熱開機: 8 秒。
每秒自動更新一次定位資訊。
精確度
一般定位:圓周25公尺內 (視使用環境而定)。
輔助定位:可啟動接收輔助定位衛星EGNOS/WAAS功能
位置誤差:
< 3公尺,3D誤差95%時間。
< 6 公尺,2D垂直誤差 95%時間。
速度:每秒誤差0.2公尺以內。
加速度:極限4G(G 為地心引力單位) 。
時間:20ns。
外觀尺寸
單機結構,內建GPS接收器、電子羅盤及天線。
尺寸: 40.0 ( 長) x 37.0 (寬) x 11.0 ( 高) 公釐(mm) 。
重量:50g(含線材)
標準線長:170公分(cm)。
電器特性
輸入電壓:+4.75~+5.5V直流。
耐候規格
操作溫度:-10℃~70℃(內部溫度)。
儲存溫度:-40℃~85 ℃。
介面規格
介面:電腦通用序列匯流排(USB)。
傳輸速率:9600bps。
輸出格式:
預設採用GPS標準的世界標準座標WGS84
NMEA-183 3.0 版 ASCII 輸出
GPRMC(預設值)
GPGSV(預設值)
GPGSA(預設值)
GPGGA(預設值)
GPGLL
GPVTG
GPZDA
第四章 注意事項
全球衛星定位系統(Global Positioning System; GPS) 係由美國國防部所
建置與運作的,系統的精準度與維護工作由該單位全權負責。該單位所做的
任何變動都可能影響GPS 設備的精準度與性能。
為了您的行車安全,我們強烈建議您不要於駕駛中同時操作本裝置。
衛星導航時,如果您位於建築物內,隧道或周邊有高大地形地物阻擋時,可
能會影響GPS 衛星訊號接收,此時並非表示本裝置故障。
第五章 快速使用
標準包裝WGM-100U ( 衛星接收器主體含線材與USB介面+防滑貼紙)+光碟+
快速使用指南。
使用電腦通用序列匯流排(USB)連接前,請先參考USB驅動程式。
將WGM-100U 連接到您的機器。
將WGM-100U主體放置於適當地方,使能接收到最良好的衛星訊號。
開機(或打開手持式裝置的電源開關)。
您的WGM-100U開始提供您衛星定位功能。
當開機後會自動進入GPS模式,您也可以短按模式切換按鍵使WGM-100U進入
電子羅盤模式,欲回到GPS模式僅需在短按一次即可(兩種模式紅色LED燈閃
爍的頻率會不一樣,於電子羅盤模式中閃爍的速度較GPS定位成功的速度較
快)。
強烈建議您在任何環境使用WGM-100U最好先行校準電子羅盤,校準方法如後
所述: 長按模式切換按鍵使其進入校準電子羅盤模式:紅燈熄滅表示正處於
校準電子羅盤模式,再按模式切換鍵即可離開,當校準成功後會進入電子羅
盤模式,若失敗則進入GPS模式。
WGM-100U 衛星接收機,包含GPS接收器、電子羅盤及接收天線,置於精密的
外殼內。使用時只要將USB接頭連接到具有USB HOST介面的裝置即可(如筆記
型電腦、車用電腦、桌上型電腦)。

第六章 操作特性
供電後WGM-100U會自行啟動機並自我測試完成後,WGM-100U紅色LED會亮起
並進入GPS模式隨即開始接收衛星訊號,並自動進行定位追蹤。正常在天空
無遮蔽狀況下,定位約需40秒鐘。(如果內部記憶中的位置推算資料仍有效,
則只需35秒鐘。)定位後,包含有效的位置資訊、速度、時間的NMEA 0183資
料即由輸出端輸出。
當首次使用本產品時,將GPS 接收器放至於衛星訊號良好的環境中,大約13
分鐘內(理論值12.5分鐘)即可收到或更新完整的星歷資料(ALMANAC)。
若有任何收訊不良情形,請先參考疑難排解,通常問題可以迎刃而解。
WGM-100U利用內部儲存的初始資料,包含前次儲存的位置、日期/時間及衛
星軌道資料,推算出目前天空所在的衛星分佈並加以追蹤鎖定,以達到最佳
的接收效果。如果內部儲存的初始化資料不正確,或衛星軌道資料已被清
除,則需要較長的時間才能定位。但當下列狀況出現時,WGM-100U會採用較
長時間的冷開機模式:
超過3個月未使用(星歷資料過舊)。
與上次有效位置超過500 公里。
WGM-100U定位後,便經由輸出介面,開始傳送有效的導航資料。這些資料如
下:
經度
緯度
高度
速度
日期
時間(UTC時間)
估計誤差值
衛星狀態
接收狀態
WGM-100U定位後,若有啟動記錄功能,則會自動開始記錄,記錄的功能與資
料如下:
最多可紀錄12680筆資料
採循環式記錄
單機無須其他裝置只需供給電源即可使用
記錄資料可透過光碟所附的G-Tool工具軟體來讀取
使用USB介面讀取記錄資料
記錄資料如下
♦ 經度
♦ 緯度
♦ 年、月、日、時、分、秒

產品開機後,如果衛星定位成功,便開始自動記錄軌跡於產品內,您可以透
過附上的G-Tool工具軟體,進行記錄時間間隔設定,從1秒~3600秒記錄一次
(出廠預設值為每5秒紀錄一次《若以5秒為單位紀錄1筆資料,12680筆約可
記錄17.6小時》,設0秒表示關閉記錄功能)。本產品採圓盤式紀錄,當資料
量超過12680筆,即刪除一部份最舊的軌跡資料,使所記錄的軌跡持續維持
在最新的狀態。
只要供給電源無論WGM-100U處於何種模式,不影響本產品記錄功能。
倘若記錄間隔時間設為0(表示關閉記錄功能)。

第七章 驅動程式
1. 執行安裝程式,接著請按下Install按鍵
2. 安裝完成

3. 接下來插入USB裝置至PC端,此時PC會主動偵測此USB裝置並要求此USB裝
置的驅動程式,若PC端為主動要求請至裝置管理員中新增USB裝置,當插入USB
裝置後,PC端會出現要求要新增硬體,如下圖
4. 按下下一步之後會出現如下圖畫面,用以安裝USB裝置,請選擇繼續安裝

5. 安裝完成
6. 安裝完USB裝置不久後,電腦會再立即要求安裝USB to UART Bridge
Controller的驅動程式,此時請按下一步

7. 當發生電腦無法正確抓取或找不到驅動程式時會發生如下畫面,此時請
按上一步來手動安裝軟體
8. 選擇從清單或特定位置安裝並按下一步

9. 選擇不要搜尋,我將選擇要安裝的驅動程式並按下一步
10. 選擇顯示所有裝置並按下一步

11. 勾選顯示相容硬體並點選機型欄位中Wintec GPS Receiver Virtual Com
Port並按下一步
12. PC端化出現下列畫面,請選擇繼續安裝

13. 完成安裝,此部分就是安裝Virtual Com Port的軟體至PC端用以模擬一
個Com Port,也就是將USB的信號轉成UART的信號
使用者可以到裝置管理員中檢查安裝完成後的狀態
14. 在下圖上方紅圈的地方表示USB裝置以正確安裝至PC端,在下圖下方紅圈

的地方表示已經將USB轉換到Com Port的軟體安裝完成,所對應到的Com Port
為COM3,使用者以後只要將此USB裝置插入PC端相同的USB 阜,既可直接使用
COM3來作為與其裝置溝通的介面

第八章 軟體介面
WGM-100U的介面格式是根據NMEA((National Marine Electronics
Association)0183 ASCII 的格式設計而成,這個格式完整規範於“NMEA
0183,3.0 版"。
WGM-100U衛星接收機,提供NMEA-0183 標準輸出格式。出廠時之NMEA 預設
值為:傳輸速率(Baud Rate)9600 bps ,資料位元:8(Bits) ,停止位元(stop
bit) 及無極性輸出(no parity) 。
接收機原廠設定值
功能名稱 描述
通訊資料內容與設定
NMEA支援格式 GPRMC, GPGSV, GPGSA, GPGLL, GPGGA, GPVTG, GPZDA
預設輸出 GPRMC, GPGSV, GPGSA, GPGGA
輸出速率(baud rate) 9600 bps
接收機行為模式
GPS 若有定位會依所設定的記錄間隔時間記錄軌跡,倘若記錄
間隔時間設為 0(表示關閉記錄功能)
羅盤 在羅盤模式下,使用者可以輕易的找到正北;當接收機在
不同的環境使用時,建議應先將羅盤校準一次,使其能正
確顯示,
記錄功能
記錄軌跡預設時間間隔 5 秒
可設定時間間隔 1~3600 秒(設 0 秒表示關閉記錄時間)
最大可紀錄的軌跡數目 12680 筆資料
紀錄型態 採圓盤式當資料超過 12680 會刪除一部份最舊的軌跡資
料,使所記錄的軌跡持續維持在最新的狀態
NMEA-0183 輸出資訊
NMEA 語言 說明
GPGGA (預設值) GPS 定位資料
GPGSA (預設值)
GPGSV (預設值)
GNSS DOP(衛星分佈狀況的優劣狀態)與有使用
於定位解算的衛星
GNSS 天空範圍中的衛星
GPRMC (預設值) GNSS 資料的最小建議值(指達到定位目的)
GPGLL 地理位置-經/緯度
GPVTG 地表運動方向與速度
GPZDA 日期與時間

$GPGGA,hhmmss.dd,xxmm.dddd,<N|S>,yyymm.dddd,<E|W>,v,ss,d.d,h.h,M,g.g
,M,a.a,xxxx*hh<CR><LF>
UTC time of the fix.此次定位的時刻(世界協調
時)
hhmmss.dd
xxmm.dddd
<N/S>
yyymm.dddd
<E/W>
v
ss
d.d
h.h Altitude (mean-sea-level, geoid) 高度
M Letter M. 單位 公尺
g.g
M Letter M. 單位 公尺
a.a NULL (not implemented) 保留
xxxx NULL (not implemented) 保留
*hh Check sum 檢查碼
<CR><LF> End 結束符號
範例:
$GPGGA,084053.39,6016.3051,N,02458.3735,E,0,00,0.0,46.6,M,18.2,M,,*5
D
hh = hours. 時
mm = minutes. 分
ss = seconds. 秒
dd = decimal part of seconds. 秒的小數點
Latitude coordinate. 緯度座標
xx = degrees. 度
mm = minutes. 分
dddd = decimal part of minutes. 分的小數位
Character denothing either N = North or S
=South. 緯度符號 N = 北緯,S = 南緯
Longitude coordinate. 經度座標
yyy = degrees. 度
mm = minutes. 分
dddd = decimal part of minutes. 分的小數位
Character denothing either E = East or W = West.
經度符號 E = 東經,W = 西經
Fix valid indicator 定位指示
0 = Fix not valid 無效定位
1 = Fix is valid 有效定位
Number of satellites used in position fix,
00-12. Notice: Fixed length field of two
letters. 使用於定位的衛星數
HDOP – Horizontal Dilution Of Precision. 水
平稀釋精度
Difference between the WGS-84 reference
ellipsoid surface and the mean-sea-level
altitude.高度與橢圓曲面之差

$GPGSA,a,b,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,xx,p.p,h.h,v.v*hh<CR><LF
>
a Mode: 手動自動定位模式
M = Manual, forced to operate in 2D or 3D mode.
手動模式,強迫使用 2D 或 3D 的定位
A = Automatic, allowed to automatically switch
2D/3D. 自動模式,2D、3D 自動切換
b Mode: 定位狀態
1 = Fix not available, 定位尚不可用
2 = 2D, 2D 定位
3 = 3D, 3D 定位
xx ID (PRN) numbers of GPS satellites used in
solution 所有有使用於此次定位的衛星編號
p.p PDOP 位置的稀釋精度
h.h HDOP 水平的稀釋精度
v.v VDOP 垂直的稀釋精度
*hh Check sum 檢查碼
<CR><LF> End 結束符號
範例:
$GPGSA,A,3,06,10,15,16,21,25,30,,,,,,2.1,1.2,1.8*38
$GPGSV,n,m,ss,xx,ee,aaa,cn,…………. ,xx,ee,aaa,cn*hh<CR><LF>
n Total number of messages, 1 to 9 總共有多少個
衛星訊息
m Message number, 1 to 9 這是第幾個訊息
ss Total number of satellites in view 總共多少衛
星可以看的到
xx Satellite ID (PRN) number 衛星編號
ee Satellite elevation, degrees 90 max 衛星仰角
aaa Satellite azimuth, degrees True, 000 to 359 衛
星方位
cn Signal-to-noise ration (C/No) 00-99 dB-Hz.
Value of zero means that the satellite is
predicted to be on the visible sky but it isn't
being tracked. 衛星的信號雜訊比
*hh Check sum 檢查碼
<CR><LF> End 結束符號
範例
$GPGSV,4,1,14,03,66,207,50,08,09,322,44,11,01,266,42,14,00,155,00*79
$GPGSV,4,2,14,15,41,088,48,17,21,083,44,18,57,087,51,21,57,173,50*78
$GPGSV,4,3,14,22,05,203,00,23,52,074,49,26,17,028,44,27,00,300,00*79
$GPGSV,4,4,14,28,32,243,00,31,48,286,00*70

$GPRMC,hhmmss.dd,S,xxmm.dddd,<N|S>,yyymm.dddd,<E|W>,s.s,h.h,ddmmyy,d
.d, <E|W>,M*hh<CR><LF>
hhmmss.dd UTC time of the fix.此次定位的時刻(世界協調時)
hh = hours. 時
mm = minutes. 分
ss = seconds. 秒
dd = decimal part of seconds. 秒的小數點
S Status indicator 狀態指示
A = valid 資訊可用
V = invalid 資訊不可用
Latitude coordinate. 緯度座標
xxmm.dddd
<N/S>
yyymm.dddd
<E/W>
s.s Speed in knots. 速度是幾節
h.h Heading. 艏向
ddmmyy UTC Date of the fix. 此次定位的日期(世界協調時)
d.d Magnetic variation in degrees, i.e. difference
<E|W> Letter denothing direction of magnetic variation.
M Mode indicator 模式指示
*hh Check sum 檢查碼
<CR><LF>
xx = degrees. 度
mm = minutes. 分
dddd = decimal part of minutes. 分的小數位
Character denothing either N = North or S =South.
緯度符號 N = 北緯,S = 南緯
Longitude coordinate. 經度座標
yyy = degrees. 度
mm = minutes. 分
dddd = decimal part of minutes. 分的小數位
Character denothing either E = East or W = West. 經
度符號 E = 東經,W = 西經
dd = day of month 日
mm = month 月
yy = year 年
between geometrical and magnetic north direction.
磁偏差
Either E = East or W = West.
磁偏差單位 E:偏東 W:偏西
A=autonomous 自動
N=data not valid 資料不可用
End 結束符號
$GPRMC,095035.91,A,6016.3066,N,02458.3832,E,1.08,210.6,131204,6.1,E,
A*0A

$GPGLL,xxmm.dddd,<N|S>,yyymm.dddd,<E|W>,hhmmss.dd,S,M*hh<CR><LF>
xxmm.dddd Latitude coordinate. 緯度座標
xx = degrees. 度
mm = minutes. 分
dddd = decimal part of minutes. 分的小數位
<N|S> Character denothing either N = North or S
=South. 緯度符號 N = 北緯,S = 南緯
yyymm.dddd Longitude coordinate. 經度座標
yyy = degrees. 度
mm = minutes. 分
dddd = decimal part of minutes. 分的小數位
<E|W> Character denothing either E = East or W = West.
經度符號 E = 東經,W = 西經
hhmmss.dd UTC time of the fix.此次定位的時刻(世界協調
時)
hh = hours. 時
mm = minutes. 分
ss = seconds. 秒
dd = decimal part of seconds. 秒的小數點
S Status indicator 狀態指示
A = valid 資訊可用
V = invalid 資訊不可用
M Mode indicator 模式指示
A=autonomous 自動
N=data not valid 資料不可用
*hh Check sum 檢查碼
<CR><LF> End 結束符號
範例
$GPGLL,6016.3073,N,02458.3817,E,090110.10,A,A*61

$GPVTG,h.h,T,m.m,M,s.s,N,s.s,K,M*hh<CR><LF>
h.h Heading in degrees. 艏向單位為度
T Letter 'T' denoting True heading in degrees. 艏
向為真方位
m.m Magnetic heading in degrees. 磁艏向單位為度
M Letter 'M' denoting Magnetic heading in
degrees.表示磁艏向
s.s Speed in knots. 速度單位為節
N Letter 'N' denoting speed in knots. 表示速度
單位為節
s.s Speed, km/h. 速度單位為公里/小時
K Letter 'K' denoting speed in km/h. 表示速度單
位為公里/小時
M Mode indicator 模式指示
A=autonomous 自動
N=data not valid 資料不可用
*hh Check sum 檢查碼
<CR><LF> End 結束符號
範例
$GPVTG,202.6,T,208.7,M,0.38,N,0.7,K,A*0D
$GPZDA,hhmmss.dd,dd,mm,yyyy,xx,yy*hh
hhmmss.dd UTC time of the fix.此次定位的時刻(世界協調
時)
hh = hours. 時
mm = minutes. 分
ss = seconds. 秒
dd = decimal part of seconds. 秒的小數點
dd UTC day of month 日
mm UTC month 月
yyyy UTC year 年
xx Local zone hours. Not implemented, output
always 00. 保留
yy Local zone minutes. Not implemented, output
always 00. 保留
*hh Check sum 檢查碼
<CR><LF> End 結束符號
範例
$GPZDA,061724.46,17,04,2003,00,00*61

第九章 疑難排解
當在以下情況可能會收不到GPS 訊號或收訊不良情況發生
當位於隧道、建築物內可能會收不到任何訊號,由於GPS信號理論上來說必
須是直線方能收到
在高樓林立的道路、山區樹木遮蔽天空的道路,可能會有收訊不良的情況,
雖然WGM-100U可接收反射的甚至很微弱的GPS衛星信號,但是在此狀況下,
定位的精確度也勢必會受到一定的影響。
若將GPS 接收器置於車內,某些隔熱紙會阻斷GPS 訊號,影響訊號接收品質。
由於GPS 衛星是由美國政府所提供,有時因某種因素降低其精準度(如在戰
時或刻意封鎖某一區域時),在這種情況下,定位點有可能偏離其正確的位
置
當在導航軟體上看到GPS所提供的定位偏離實際道路時,這是因為大氣層變
化的影響造成定位誤差變大,這實所難免,但若您發現無論信號好壞位置總
是偏移,很可能是您使用的地圖的座標系統並非GPS標準的WGS-84的座標系
統。
某些導航軟體讀取NMEA0183 GPS接收機所提供的導航資料時,僅讀取經緯度
而沒有取用高度資料,所以在地圖上僅能以平面位置顯示,故當您在高架橋
下時,導航軟體無法辨別您在橋上或是橋下。
假設您在甲地有使用WGM-100U並且定位成功後,當您攜帶WGM-100U且在未使
用的情況下移動到乙地(超過500公里),您的WGM-100U可能無法在乙地順
利定位,主要是由於GPS接收機根據最後的有效位置、時間、與衛星資料所
算出來的甲地的衛星與乙地的當地衛星不同,所以你可能需要較久的時間方
能順利定位並更新最後有效位置。
使用USB連結電腦時,請先安裝光碟內之USB驅動程式並確認其裝置使用的
COM PORT是正確。
倘若您使用WGM-100U於導航運用,有正常連線且確定有資料輸出但卻無法正
常使用於導航軟體之中,請確定導航軟體所需的NMEA0183的格式,並使用
G-Tool設定之(詳見G-Tool使用說明)。
假設您使用時發現角度不太合理,那就表示您的WGM-100U的電子羅盤需要校
準,請依校準程序校正之。
 Loading...
Loading...