

GlenteK SME9807, SMB9715, SMB9815, SMB9830, SMB9845 User Manual
...
2010 Version
Glentek 伺服驱动器
SME9807/SMB9715/SMB9815
SMB9830/SMB9845/SMB9875
E-motion America,Inc.
编译者:高满元
[安装与操作手册]
您的选择是正确的,这是最好的伺服

目 录
目录 ................................................... .... .. ........................ ..... ......... ............ . .............. . 2
概述 ............................................................................................... .. .. .. .... .. .. .... .. .. .. .. .. 4
产 品 描 述 . ... .. .. ... .. .. .. . .. .. .. ... .. .. ... .. .. .. . .. .. ... ..... .. .. ... .. .. .. . .. .. .. . .. .. . ... .. ..... .. .. .. . .. .. ... ..... .. ..... 4
电 流 ( 转 矩 ) 模 式 .................................. ... ... .. . .. . ... ... ... ... ... . . .......................................4
速度 模式 ......................................................................................................................4
三相电模式 . .. .. .. . .. .. .. ... .. .. . ... .. .. ..... .. .. ... .. .. ... .. .. ... .. .. ..... . . .. .. . .. .. .. . .. .. .. ... .. . .. ... .. .. ... .. . .. .. .. . 5
脉 冲 和 方 向 位 置 模 式 … … … … … … … … … … … … … … … … … … … … … … … … ..5
脉冲(步)和方向模式.. . ... . ... . ... . ... . ... . ... . . . ... . .. . . ... . . .. . . .. . . .. . .... . .. . . .. . ... . . ... . .. . . .. . ... . . ... . .. . . .. 5
CW / C CW 脉 冲 ( 步 ) 模 式 . .. . ... . ... . ... . . .. . .. .. . ... . ... . . .. . . ... . .. . . ... . ... . .. . . ... . .. . . .. . ... . ... . . .. . ... . ... . .. 5
编码器跟踪 模式 ... .. ... .. .. ... .. ... .. ... . .. ... .. ... .. . .. .. . .. .. ... .. ... .. ... .. .. ... ..... .. ... ... .. ... .. ... .. .. ... .. ... .. .. 5
PW M ( 占空比) 模式 ........................................................................... . .. . .. ... . .. . .. . .. ... .. . 5
特性 .. .... .. .. ....... .. .. .. ....... .. .. ......... .. .... ....... .. ......... .. .. .. ..... .. .. .. .. .... ..... .. .... .. .. .. .. ....... .. .. .... 6
指 令 输 入 控制 图 ....................................................................................................... 7
速 度 控 制 回路 图 ....................................................................................................... 8
电 流 控 制 回路 图 ....................................................................................................... 9
脉冲和方向位置模式控制回路图. . . . ..... . . . . . . . . . . . . . . . .. . ..... . . . . . . . . . . . ..... . . . . . . . . . . . . . .... . . . . . . . . . . . . 10
驱 动 器 设 置 软 件 . . ... ... ... . ................................................................................... 11
MOTIONMAESTRO安装...................................................................................................11
MOTIONMAESTRO 驱动器设置功能. ...........................................................................12
开启通讯.................................................................. .. ...... .. .. .... ......... ...... .... .. .. .. .. .. .. .. .. .. 12
型号信息.................................................................. .... .. .. ............ .. .. .. .. .. .. .. .. .. ...... . .. .. .. .. 14
数 字 化 输 入 / 输 出 设 置 . . ... ... . .. . ... . .. . . .. . ... ... . .. . . ... .. . .. . ... . ... . ... ... . .. . ... . . ... . .. . ... . .. . ... . ... . .. . ... .1 4
驱 动 器 模 式 设置 . .. . .. .. .. ... .. .. ... .. .. .. ... .. .. ... .. .. ... .. .. ... ... .. .. . .. .. ... .. .. .. ... .. .. ..... .. ..... .. .. ..... .. ..... 1 4
电机参数 .. .... .. .. .... .. ......... .. .. .. ....... .. .. ....... .. .. .. ..... .... .. ......... .. .. .. ... .. ...... ....... .. .. ....... .... .. ..1 5
电机安全..... .. .. .. ..... .. ....... .. .. .. ..... .. .. ..... .. .. .. ....... .. ..... .. .. .. ....... .. ..... .. .. .. ....... .. ....... .. . .. ....... .15
整流设置....... .................................................................................................................16
编码 器 .... ..... ... .. ... ..... .. ........ .. ... ..... ..... ..... ... .. ..... .......... ... .. ... ..... ..... ... .. ... ..... ..... .. .. .. ... ......16
轨迹 生成 ..... .. ..... .... .. ..... ....... ..... .. ..... .. ..... .. ..... .. ... .. ....... ..... .. ..... ....... ..... .. ..... ...... ..... .. ..... 17
滤波 器 ................................................................................................................. ..... .......17
示波器设置 .. .... .. .. .. .. ....... .. .. .. ..... .. .. .. ....... .. .. ... .... .. ......... .. ....... .... .. .. ... .. .. .... .. ..... .. .. .. ....... 18
终端窗口..... .. .. .. ..... .. ....... .. .. .. ..... .. .. ..... .. .. .. ....... .. ..... .. .. .. ....... .. ..... .. .. .. ....... .. ....... .. . .. ....... .19
驱动器状态..................... ......... .. .. .. .. .. .. .. .. .. ..... ...... .. .. .. .. .. .. .. . . .. .. .... .. .. .. .. .. ......... .... .. .. .. .. .. 19
控制回 路 信号..................................................................... ..........................................19
数字化输入 .............................. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .... .. .. ........................ ...... ..19
故障..... ... ..... ..... ... .. ... .. ... ..... ... .......... ..... ........ .. ... ..... ... ..... ..... ... .. ... ..... ..... ........ ..... . ..... ..... .2 0
警告... .. ... .. ............ .. ... .... . ... .. .. ..... ....... ..... .. ............ .. ... .. ..... ....... .. ... .. ....... ..... .. ..... . ... ... .. ...20
状态 .. .. ....... ..... .. ....... .. ..... .. ..... .. ....... .. ... .. ....... .. ..... .. ..... .. ....... .. ..... ....... .. ....... .. ... . .... ..... .. 20
控制面板........................ .. .. .. .. .. .. ............... .... .. .. .. .. .. .. .. .. .... .... ......... .. .. .. .. .. .. .. .. .. .. .. .. .. .. .. .2 0
电机调试............................................................................................................... .. .... .. 21
保 存 参 数 到 非 易 失 性 记 忆 存 储 器 ................. . . . . . . . . . . . . . . . . . . . . ..... . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . 2 1
在 磁 盘 上 创 建 一 个驱 动 器 参 数 的备 份 ................................................................. . . . .. 2 1
硬件 ... .. .. .. ....... .. .. .. ..... .. .. .. .. ....... .. .. .. ....... .. .. .. ....... .. .. .. .. .. .. ... .. .. .. .. .. ... .. . ............ ……...22
状态 显示 ......................................................................................................................22
控制器输入和输出信号.. . . . ... . ... . ... . .... . ... . ... . ... . . ... . ... . ... . ... . . . . . .. . . ... ... . ... . .... . ... . ... . ... . .... . ..2 2
指令信号, 模拟 输入 ........................................................................................... .. .. 23
指令信号, 相数和 方 向位置模 式 ...................................................................... ..... ...... ............. 24
模拟 输出 ......................................................................................................................24
离散 输入 ......................................................................................................................25
限位.. ....... .. .. ....... .. .. ..... .. .. ......... ..... .... .. .. .. .. .... ....... .. .. .. ..... .... .. ......... . .... .. ......... .. .. .. ..... .. . 25
驱动器硬件抑制................................. .. ... ... . .. .. . .. . .. ... .. . .. . .. ... .. . .. ... .. .. . .. ... ... .. . .. ... .. . .. . .. ... 25
驱动 器 重 置 .. .. .. .. . .. .. .. ... .. .. .. ....... .. .. ... .. .. .. . .. . . .. ..... .. .. .. . .. .. .. ..... .. .. ..... ....... .. .. .. ... .. .. . ... .. .. ... 26
驱动器故障输出...................................... ... ... .. . .. ... ... .. . .. ... ... .. ... .. . .. .. ... .. . ... .. ... .. . .. . .. ... .. . 26
编码 器 输 出 .. .. .. .. . .. .. .. ... .. .. .. ....... .. .. ... .. .. .. . .. .. .. . .. .. .. ..... .. . ... .. .. . .. .. .. ... .. .. ..... .. .. ..... .. . ... .. .. ... 26
编码器外部电源.................................................................................................... . .. . .. 26
电源输入/输出信号 . . . . ... . . ... . . .. . . ... . ... . . . .. . . ... . ... . .... . . .. . . ... . ... . . . .. . . ... . ... . ... . . . . . . . ... . .... . . .. . 2 6
总 线 电 压 .. .. ... .. .. ... .. .. ... .. .. .. . .. .. .. . .. .. ..... .. ..... ....... .. ... .. .. ... .. .. ... .. .. ... .. .. ... .. .. . .. .. .. ... .. .... .. .. 2 6
电机 电 源 ... .. .. .. ... .. .. ..... .. ..... .. .. ..... .. .. ..... .. .. ... .. .. .. . .. .. .. ... .. .. ..... .. .. ..... .. .. .. ... .. .. .. . .. .. .. .... .. ..27
计算机接口 . .. . .. ... .. ... .. ... .. ... .. ... .. . .. ... .. ... .. ... .. . .. ... .. ... .. ... .. . .. .. ... .. . .. ... .. . .. .. ... .. . .. ... .. .. .. ... .27
可 选 继 电 器 输 入 / 输 出 ...........................................................................................28
编码器反馈................... . .. ... ... ... .. ... ... .. . .. ... ... .. . .. ... ... ... .. ... ... .. . .. ... ... .. . .. ... ... ... .. . .. .. .. .. . .. .28
2

编 码 器 电 源 , 驱动 器 供 电 ........................................................................................29
编码器信道 A , B 和 Z ... . . . ... . . .. . . ... . . . .. . . ... . ... . . . ... . . . ... . . ... . . ... . . ... . . .. . . . ... . . ... . . .. . . . ... .. .. . . 29
霍 儿 传感器信道1,2和3.... . . . . . . . . .... . . . . . . . . ..... . . . . . . . . . . .... . . . . . . . . . .... . . . . . . . . .... . . . . . . . . .... . .. . . 29
外部故障.. ... .. .. . .. ... .. .. . .. .. ... ... .. .. ... ... .. .. . .. ... .. .. . .. .. ... ... .. .. ... ... . ... .. ... .. .. . .. ... .. . ... .. ... .. . .. ... .29
重置 .............................................................................. .........................................29
驱动器和电机的连接 . . . . ... . . ... . . .. . . ... . ... . . . .. . . ... . ... . .... . . .. . . ... . ... . . . .. . . ... . ... . ... . . . .. . . ... . .. .... . . .29
驱 动 器 外 部接 线 . . .. . .. . .. . . .. . .. . .. . .. . .. . ... ... ... ... ... . .. . .. . .. . .. . ... ... ... ... ... . .. . .. . .. . .. . ... .. ...............29
串行端口.. ... .. .. . .. .. ... .. . .. .. ... ... .. .. ... .. ... .. . .. .. ... .. . .. .. ... ... .. .. ... .. ... .. . .. .. ... .. ... .. .. . .. ... .. ... . ... .. ... 29
编码 器 . ..... .. ..... .. ... .. .. ... .. .. ... .. .. .. ... .. .. ... .. .. .. . .. .. .. ... .. .. ... .. .. ..... .. .. ..... .. ..... .. .. ..... .. ..... . .. .. ... 30
逻辑电 源 应 用 ............................................................................................................30
参数设置.............................. .. . . . .. . . . ... . . ... . . ... . . . ... . . ... . . ... . . ... . . ... . . ... . . ... . . . ... . . ... . . ... . . . ...3 0
驱动器调试和驱动器和电机连接 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1
G V S ( 速 度 增 益 比 率 ) 设置.......................................................................... . .. .. 33
速度 ( R P M ) 模式调试 . . . . . . . . . . . . .. . . . .. . . . . . . .. . . . . .. . . . .. . . . . . . .. . . . .. . . . . .. . . . . . .. . . . . .. . . . . . .. . . . . .. . . .3 4
二 相电(转矩)模式调试 . . .. .. . .. .. .. .. .. . .. .. .. .. .. .. .. .. .. .. . .. .. .. .. .. . .. .. .. .. .. . .. .. .. .. .. .. .. .. . . 36
脉冲跟踪 位 置 模 式 调 试 . .. . .. . .. . . . .. . . .. . . .. . . . .. . . .. . . .. . ... . . . . . . . .. . . .. . . . .. . . .. . . .. . .. . . . .. . . .. . . .. . . . .. .37
PWM 模式调试 . . . . . . . . . . . . . . ..... . . . . . . . . . . . . .... . . . . . . . . . . . . . ..... . . . . . . . . . . . ..... . . . . . . . . . . . . . .... . . . . . . . . . . ..39
附录 . . . ... . . ... . ... . ... . . .. . . . .. . . ... . ... . .... . ... . . .. . . ... . . ... . ... . . .. . . .. . . . .. . . ... . ... . ... . . . .. . . . .. . . .. . . ... . .... ..4 0
A 伺 服 驱 动 连 接 ................................................................................................ 4 2
B 通 讯 错 误 代 码..................................................................................................46
C驱 动 器 状 态 代 码 ... . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
D S M A, S M B , S M C , S M E 9 8 X X 类 别 和 型 号 .................................................48
电 源 , 输 入 / 输 出 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .......................49
信 号 输 入 . . ... . . . . . . ... . . . . . ... . . . .... . . . . .... . . . . ... . . . . . ... . . . ... . . . . . . ... . . . . ... . . . . .... . . . . ... . . . . .... . . . . . ......49
数字化输入 . . . . . . . . . .... . . . . . . . .... . . . . . . . .... . . . . . . . . . ... . . . . . . . . .... . . . . . . . .... . . . . . . .... . . . . . . . . ... . . . . . . . .. . . . . 49
输 出 . . ... . . ... . ... . ... . ... . . .. . . .. . . .. . . .. . . ... . ... . ... . ... . . .. . . ... . ... . ... . . .. . . .. . . .. . . ... . ... . ... . ... . . ... . ... . .. .... .49
系统..........................................................................................................49
E 用霍儿 传感器连接电机相接头到驱动器指令上 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
F 测 定 编 码 器 的 分 辨 率 和 极 的 数 量 . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . 5 4
G 整流轨道信号及相与 相 的反电动势 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . .. . . . . .. . . . . . . . . . 5 5
H 欧 盟 电 磁 兼 容 指 令 . . .. . .. . .. . . .. . .. . .. . .. . . .. . .. . .. . . .. . . . .................. . . . . . . .. . .. . . .. . .. . .. . .. . . .. . 56
系统设计的 电 磁 兼 容 性指 南 ................................. . .. . . .. . . .. . . . .. . . .. . .. . . . .. . .. .. . . .. . . . .. . 56
I 驱 动 器 术 语 和 技 术 . . . . .. . . .. . . . . .. . . .. . . .. . . . . .. . . . . .. . . .. . . .. . . . . .. . . .. . . . .. . . . . . .. . . .. . . .. . . . . .. . . .. . . . 6 1
J 驱 动 器 型 号 编号. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . ....... 64
3

概述
这个手册通过必要的步骤指导应用工程师去成功安装
和应用欧米茄系列驱动器。数字化驱动器的所有功能的解释
和全部所必需的安装、调试程序都包括在内。以下各节的有
序介绍将使大多数新手们更容易地去安装驱动器。
这些“产品说明”和“功能”部分所包含的信息将使应用
工程师决定这些 Omega 系列驱动器在他的实际应用中是否合适。
下一步将要介绍 MotionMaestro© 软件。这里将列出足够的资料使应用工程师熟悉那些必要的工具,去用
Omega 系列驱动器来安装和调试伺服电机。
硬件部分概述了所有的硬件和连接器,它们是安装 Omega 系列驱动器到实际应用中时所必须的。
一旦这些准备工作就绪,应用工程师可以通过一步一步的程序来完成系统设置。
最后,应用工程师可以使用 MotionMaestro ©去微调数字化电流或速度回路,以满足特定的应用要求,这些
调试也包括在内。
产品介绍
Glentek 的欧米茄系列数字 PWM 无刷伺服驱动器提供了最新的高性能 DSP 控制的旋转和直线无刷伺服电
机。随着广泛的表面安装技术和特殊传热技术的应用,欧米茄系列驱动器提供了世界上最强大的产品。
伺服驱动器在电流(扭矩)模式或速度(每分钟转速)模式下运行,接受+ / - 10V的模拟输入作为指令,
并且同时整流电机使它在低速时平稳运行。在位置模式下,接受脉冲信号来控制电机的位置。该电机采用增量
式编码器来获得速度信号和整流电机。绝对整流角度通常取决于霍尔传感器或编码器整流轨道。然而,在一些
高成本敏感的应用中,开启时轻微的电机运动可以被接受,驱动器可以运行一个通电时用相电来寻找相位的程
序,它可以去除使用霍尔传感器或编码器轨迹的需要。
电流(力矩)模式伺服驱动器
电流模式伺服驱动接受+ / - 10V 的模拟输入作为电流指令。在此模式下运行,在实际应用中,驱动器提供
了高电流回路带宽以获得高加速度和高的速度。Glentek 高带宽电流模式驱动器是在高性能线性电机数字定位系
统中使用。
速度(每分钟转速)模式伺服驱动器
速度模式伺服驱动器接受+ / - 10V 的模拟输入作为速度指令。由于
运行此模式,它始终使用高线计数旋转编码器,尤其是5000或8192线
每转的编码器,因为这将使电机在低速时有平稳的效果。高线计数编码器和整流轨道是首要推荐的。 Glentek
的高增益/高带宽速度模式驱动器是首选,而且使用在许多高性能数字化定位系统中。
4
三相电流模式伺服驱动器
三相电流模式伺服驱动器接受两个+ / - 10V 的模拟输入作为电流指令,去参照电机的两个相电。第三相电
来源于前两个参考的相数。这个模式的驱动器不使用任何反馈装置,并与提供整流的控制器共同使用。
脉冲和方向位置模式伺服驱动器
脉冲跟踪伺服驱动器采用了全功能伺服驱动器的所有功能,它还接受两个数字化脉冲输入信号作为位置的
指令输入。在驱动器中,脉冲输入是由不同线路接收器终止的,它们可配置为4种模式的脉冲和方向位置模式。
电机的位置和速度只是脉冲数量和脉冲速率功能的一个方面。他们被描述如下:
想了解脉冲跟踪位置模式调整,请参见第42和43页。想了解指令信号输入,请参见第29页。
脉冲(步骤)和方向模式
第一个输入是脉冲串,用来建立绝对距离和速度的;第二个输入是一个方向信号,用来确定旋转方向;许
多步进电机控制器提供这种脉冲方式并允许升级步进电机系统到伺服电机系统,而不需要改变控制器。
CW/CCW脉冲(步骤)模式
第一个输入是一个脉冲串指挥阳极(CW)移动,第二个输入是一个脉冲串团指挥负极(CCW)移动。这
种脉冲类型同样是由一些旧式步进电动机的控制器产生的,它们或许在系统升级到伺服电机系统中有用。
编码器跟踪模式
两个正交脉冲输入,如增量式编码器的输出或编码器输出决定了距离和方向的指令。脉冲解码器是特别有
用的,它能使一台电机的参数释放到另一台电机,通过连接有参数的电机编码器脉冲输出到无参数电机的编码
器脉冲输入。
PWM(占空比)模式伺服驱动器
PWM模式设计为可以和大多数运动控制芯片兼容,这些芯片是可以在市场上买得到的,比如National,HP
和PMD。在PWM(占空比)模式下,恒定频率的脉冲被应用于脉冲/ PWM输入,这个脉冲的占空比控制着电机
的转速或电流(扭矩)。
有如下所示两种模式:
模式1:
50%的占空比= 0速度(电流)或电流(转矩)
0%的占空比=最大负速度或电流(CCW)
100%占空比=最大的正速度或电流(CW)
模式2:
0%的占空比= 0速度或电流
100%占空比=最大速度或电流
在这种模式下,方向信道(DIR+ /DIR- )被用于选择旋转方向。
5

特性
数字电流环:电流环带宽高达3KHz。
数字化调试:所有参数数字化设置,无电位计调整。DSP高性能控制。
静音操作:25KHz PWM
完整的独立性:在信号和电源之间的完全光隔离。
宽工作电压:30-370伏直流驱动器模块,全部独立和多轴版本可以运行从110-130伏交流电或:208 - 240伏交
流电(单相或3相,50/60 Hz)。 注:SME9807-1A-1独立式驱动器只是单相电输入。
供电电源:独立的模块或多轴机箱无需变压器。独立的模块和多轴机箱包括直流电源供应,散热风扇,软
启动电路和制动电阻。
故障保护:输出到输出短路保护,输出到地短路保护,驱动器RMS过流保护,驱动器欠压/过压保护,驱动
器温度过高保护,电机温度过高保护。
RS - 232或RS-485/422:高速(115.2千波特)串行通讯接口设置和调试。 RS-485/422多接口,可安装高达
31部驱动器。
软件配置:基于Glentek’s Windows™的MotionMaestro© 软件提供了简便的设置和调试程序,而无需编程方
面所需要的经验。这个软件和Windows™ 95/98/2000/XP 和NT兼容。
只读存储器:所有参数和位置存储在只读存储器中来进行可靠的启动。此外,多达两个不同的配置可以存
储在驱动器的只读存储器中。
专用输入:+ / -位置限位,制动,故障,电机温度过高和复位信号。
专用输出:可选的模拟监测信号,故障和编码器输出。
三个基本模型:几乎涵盖了所有的伺服需求,欧米茄系列包括了全功能位置,电流/速度驱动器,2相输入
电流驱动器和脉冲跟踪驱动器。
编码器输出减频器:编码器输入信号可以按用户选择的整数1-8输出信号来分频。
注:非标准频率变频可以根据要求命令设置。
编码器反馈:接收编码器信号高达4.3M兆赫。特别版本也可以用于解码Sanyo Denki, Tamagawa 和Yaskawa,
它们减少了电线编码器的作用。
状态指示灯:7段显示器显示电机的状态和诊断情况。
正弦整流:为了最终高效和平稳地运行,从几乎任何一个线性光栅尺或旋转编码器开始整流。
外部逻辑电源输入(只限于SMC9815,SMC9715):24到48伏直流,600mAmin@ 24伏直流。提供所有驱动
器逻辑和编码器供电。
DC24V电源输入:只限于SME9807-1A-1独立式驱动器,用于风扇独立供电。
滤波器:给控制工程师提供了不同高级的过滤器去消除不想要的系统机械共振。
6
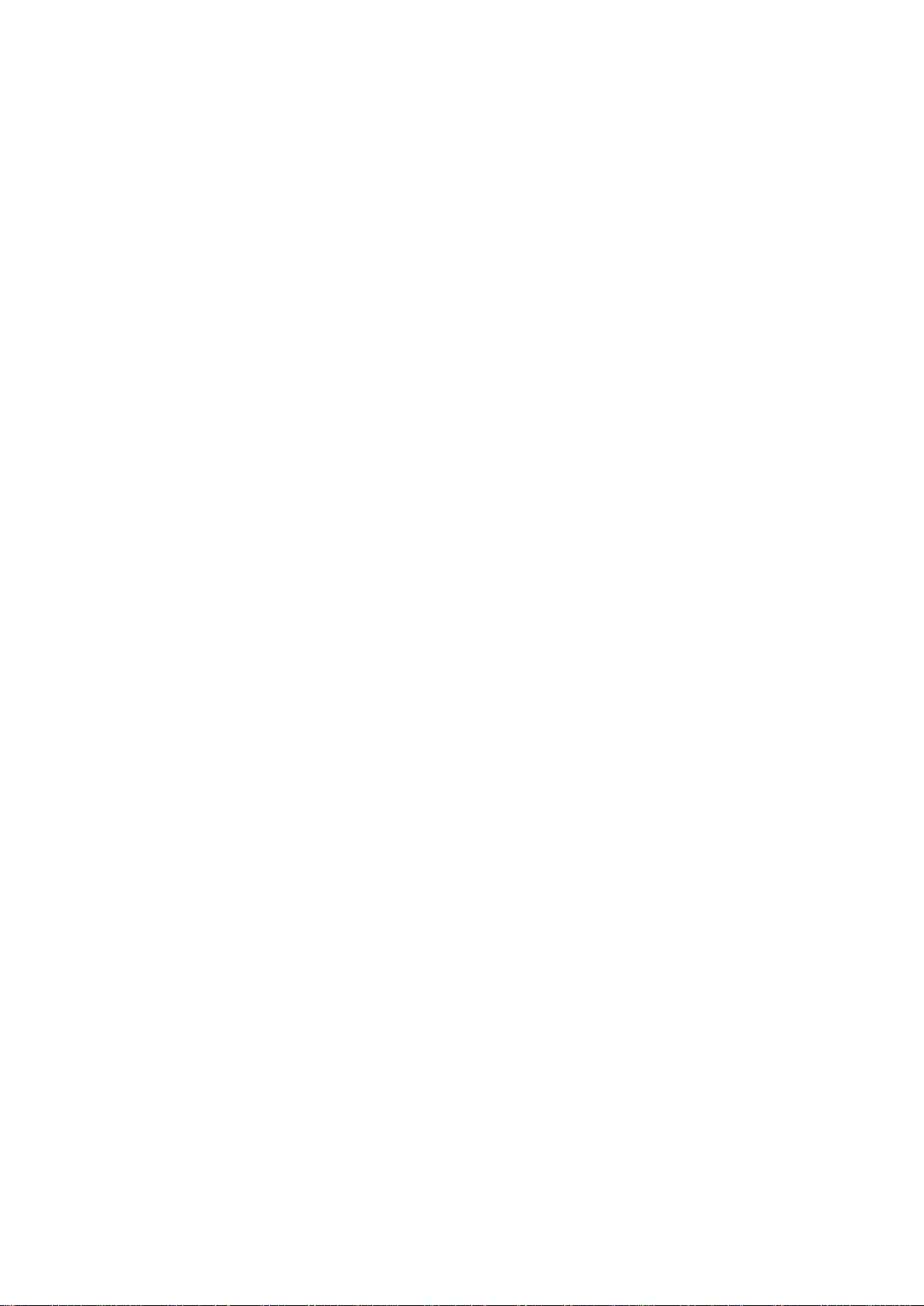
指令输入控制图
7
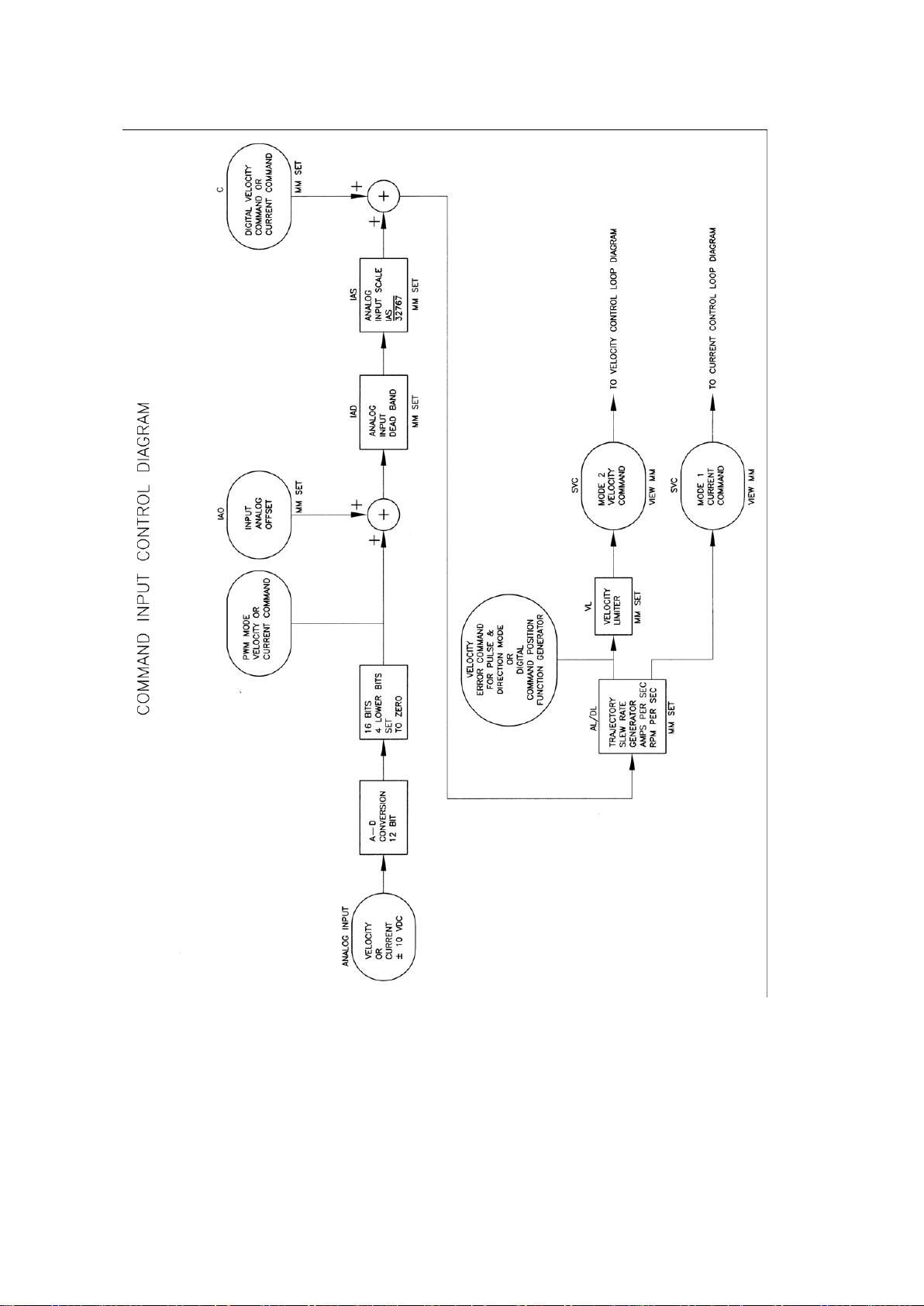
速度控制回路图
8
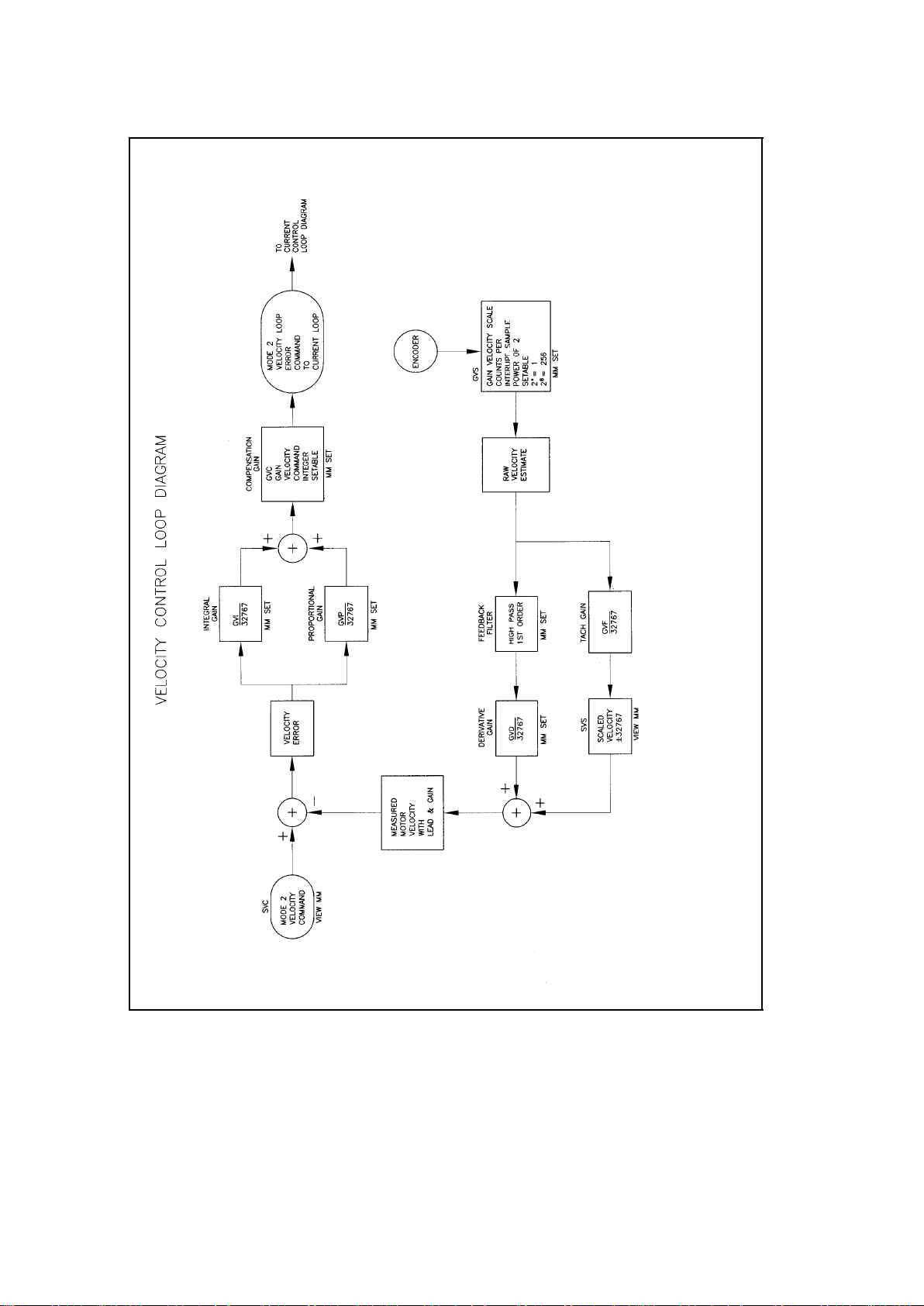
电流控制回路图
9
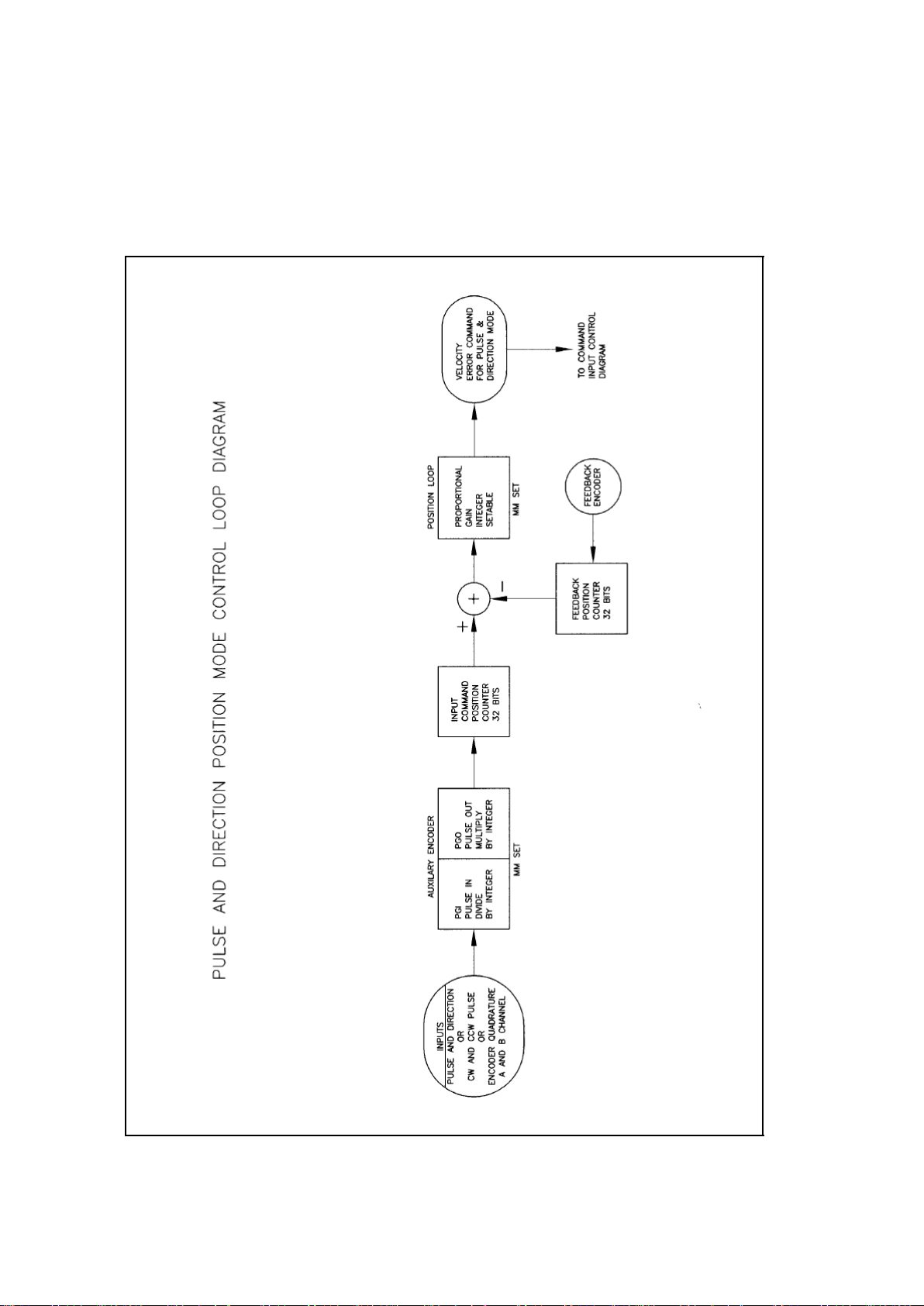
脉冲和方向位置模式控制回路图
10
MotionMaestro ©软件
MotionMaestro ©是基于 Glentek's Windows 的应用软件,它被设计用来与欧米茄系列数字化驱动器的通
讯。 MotionMaestro ©有许多显示参数值的对话框,有了这些对话框,会更加容易地来选择和设置驱动器的各
项功能。 MotionMaestro ©利用标准的 ASCII 指令和协议。即使没有必要使用 MotionMaestro ©,但是通过使
用它, 安装,设置和调试会变得更加容易。
MotionMaestro ©有许多功能,让应用工程师可以轻松地配置数字化驱动器到实际应用中。它有一个在 115K
传输速率下运行的终端模式,示波器用于监测驱动器的信号;对话框用来控制电机的输入。通过使用示波器和
调试对话框,我们可以监控每步的效果,来确定伺服参数去获得最优控制回路性能。
MotionMaestro ©软件的安装
MotionMaestro ©软件需要 Windows95,Windows 98 SE 和 Windows ME,Windows NT 4.0,Windows 2000
或 Windows XP 操作系统在个人电脑(PC)上运行,而且电脑至少有一个串行端口。建议在安装软件前,你有
不少于 3 兆的应用程序磁盘空间在硬盘上。MotionMaestro ©的安装盘被设置为利用安装保护来简化安装。它
上面提供了一些安装选项。一般来说,你可以按 NEXT 或 YES 按钮就可以完成安装。当安装完成后,你在窗口
开启\程序菜单中找到一个 MotionMaestro ©软件的快捷键。
当你阅读完下面所有的条款后,你才可以运行 MOTIONMAESTRO©这个软件。
MotionMaestro ©的安装程序被命名为 Setup.exe,你可以从文件软盘中的 Disk1或从 MotionMaestro © \ Disk1
的 CD 文件中找到。安装 MotionMaestro©软件时,电脑将在程序文件文件夹中创建一个 Glentek 文件夹。
MotionMaestro © _X_X 文件夹被创建,_X_X 和版本号匹配。你可以有多个 MotionMaestro©安装的版本号,如
果你愿意,它们也可以放到它们自己的目录中。
11
当操作MotionMaestro ©软件去和驱动器建立通讯时,电机驱动器会显示出一个询问模式ID和系统固件版
本的对话框。MotionMaestro ©软件将根据驱动器反馈的值来配置自身,并且选择合适的配置文件。
在驱动没有连接时,你就可以运行MotionMaestro©这个软件,并且检查菜单选项和对话框。要运行演示模
式,下拉Communications菜单,选择Demo选项。
要想和已连接的驱动器建立通讯,在communications菜单下选择 open 选项。
在Help菜单下有大量的帮助信息。选择Help Topics 选项,您可以阅读到有关MotionMaestro ©使用说明
和它的各种功能。
MotionMaestro ©驱动设置功能
手册的这部分是对MotionMaestro功能的介绍,这在安装和设置 Omega系列驱动器时所必需的。只有那些
需要用来定义电机特征的MotionMaestro© 功能包括在内。这并不意味着它是一步接一步教程式的安装。“系统
设置”部分是作为电机设置教程编排的。当你安装电机时你会参考这一部分。下面将要列举它的各种功能。
1.开启通讯
2.型号信息
3.数字化输入/输出设置
4.模式设置
5.整流设置
6.编码器设置 。
7.轨迹生成
8.过滤器
11.电机参数
12.电机保护
13.驱动器状态
14.控制面板
15.电机调试
16.保存参数
17.备份驱动器参数
9.示波器
10.终端窗口
开启通讯
在 MotionMaestro© 软 件 使 用 前 , 驱 动 器 和 运 行
MotionMaestro© 软 件 的 电 脑 一 定 要 建 立 起 通 讯 。 在
MotionMaestro©软件上开启通讯前,你必须按照手册硬件
部分所述把串行通信电缆连接好。它可以是RS-232 或RS-
12
485/422连接。同样你还需要去按照系统设置部分
所 述 在 你 的 电 脑 上 设 置 串 行 端 口 。 在
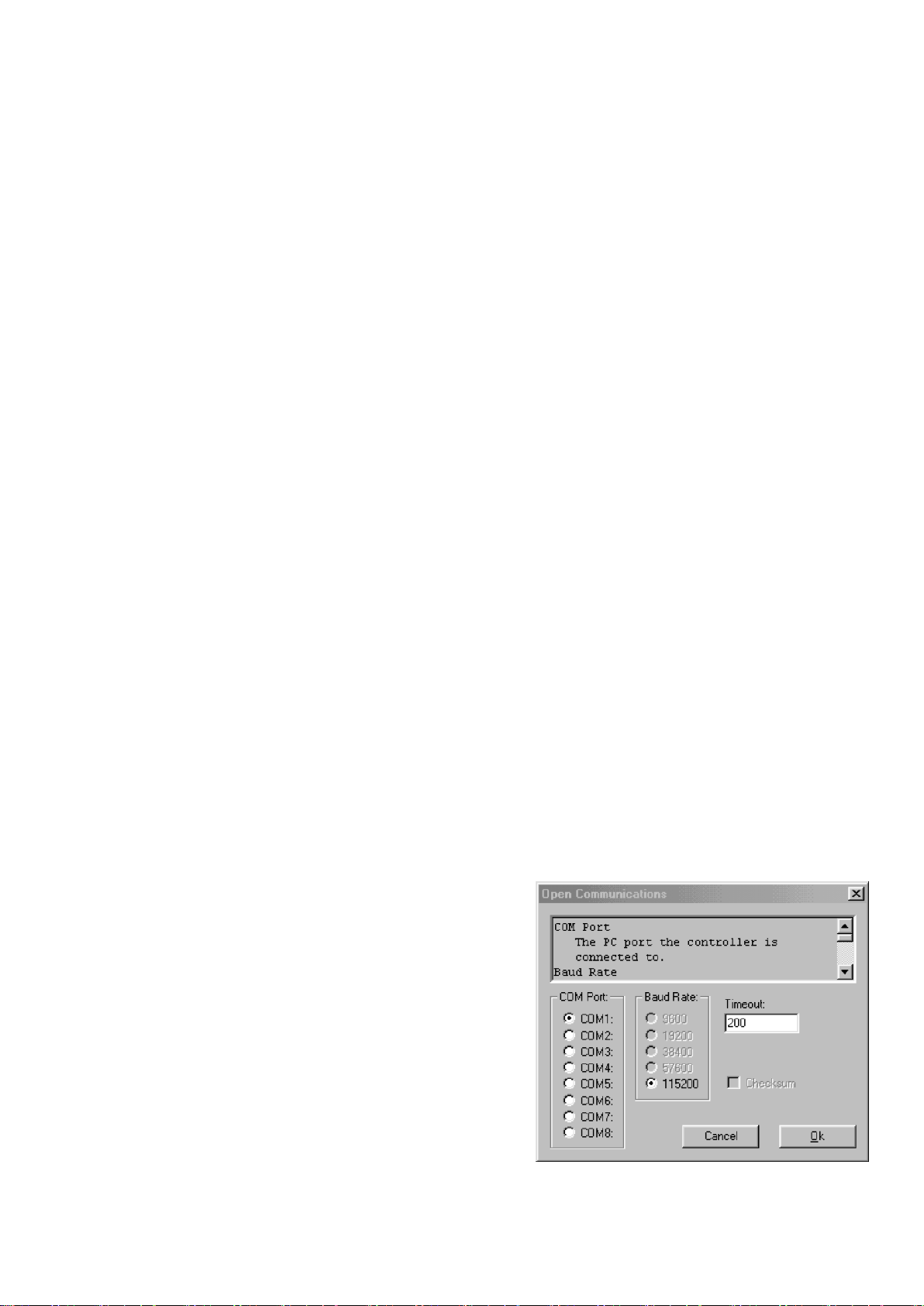
MotionMaestro©的主菜单工具栏中选择“Open”
按钮来开启通讯。
选择COM端口,而且你已把串行端口电缆连接
到它上面,并确保选择了115200的传播速率。当
你按下OK键时,Motion-Maestro© 将会询问驱动
器去确定连接哪种驱动器模型。如果通讯被确定,
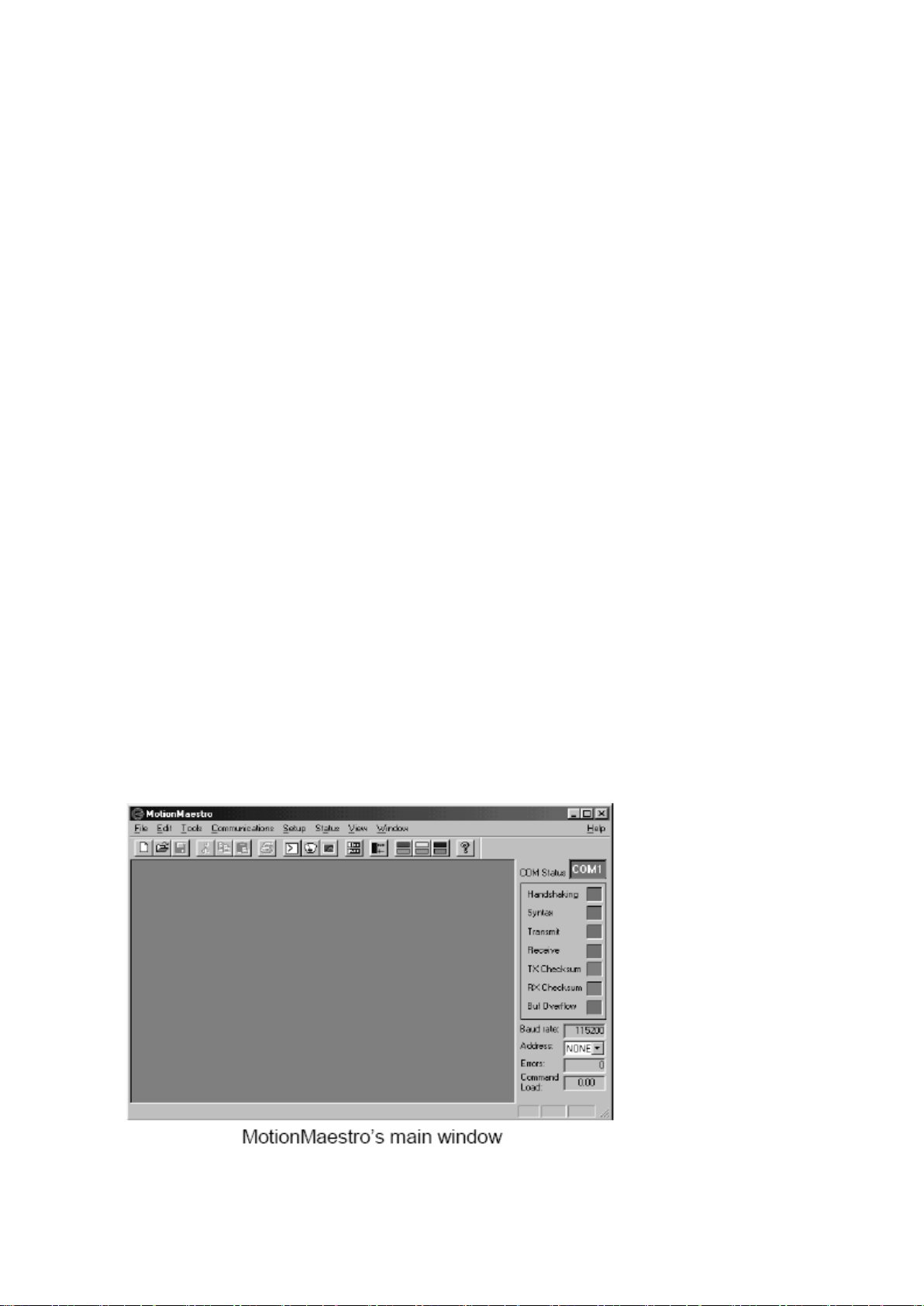
你将看到类似于下面所示的图面,并且通讯状态指示灯全为绿色。
当通讯不能建立时,会弹出一个对话框显示这个情况。如果你不能建立通讯,请检查你的通讯电缆,电脑
COM端口设置和驱动器电源。
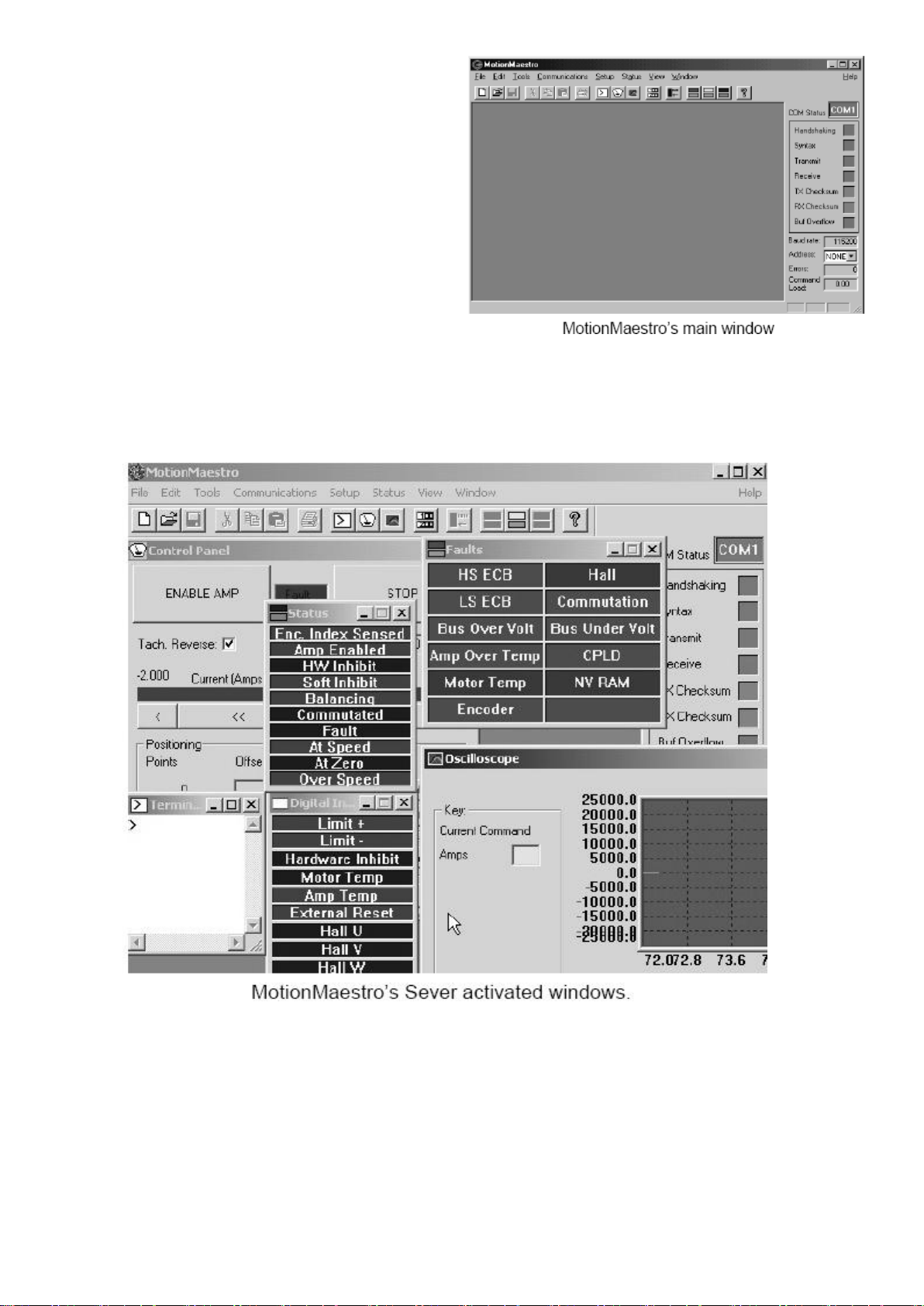
右边,MotionMaestro的主窗口显示了通迅成功建立和各种被激活的设置和监控屏幕。这些激活的屏幕不
一定需要留在MotionMaestro的主窗口中,它们可以显示在Windows桌面上的任何地方。
13
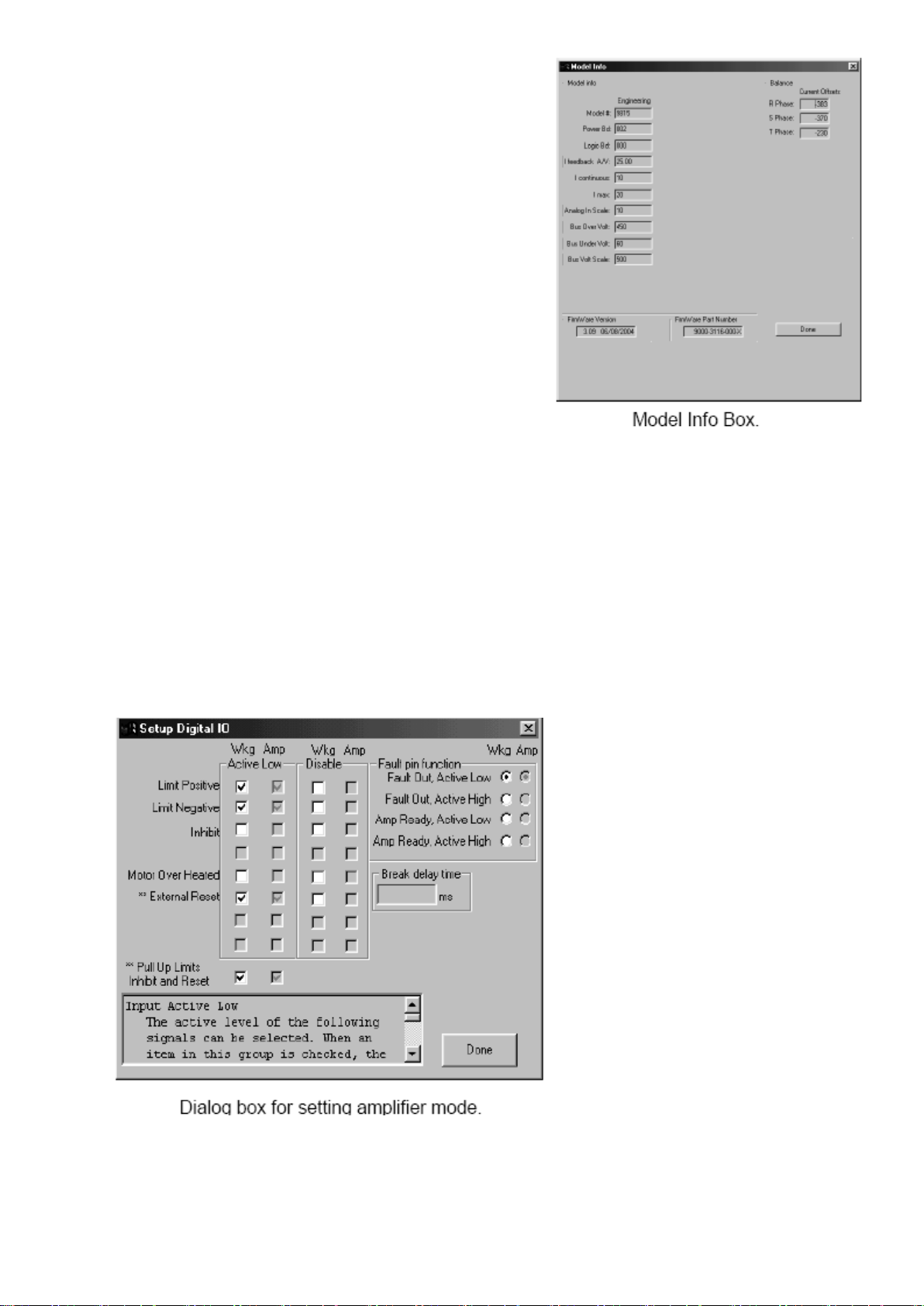
型号信息
为了参考之用,您可以参考型号的信息对话框来查看设计
的特点和特殊电机的限制。要查看此对话框,您必须选择在
MotionMaestro’s©主菜单工具栏上的“Tools”选项,然后选
择“型号信息(Model Info)”。
在这里您可以查看固件版本和日期,驱动器型号,电源和
逻辑。此外,MotionMaestro的型号信息对话窗口将显示驱动
器的设置。例如,在左侧,这些设置为电流平衡补偿,电流反
馈,连续电流和峰值电流设置。
这些设置,除了总线欠压和过压设置外,都是有用的信息
工具。
并且当用户想浏览自已所操作的驱动器的数值时,它们也是必不可少的。
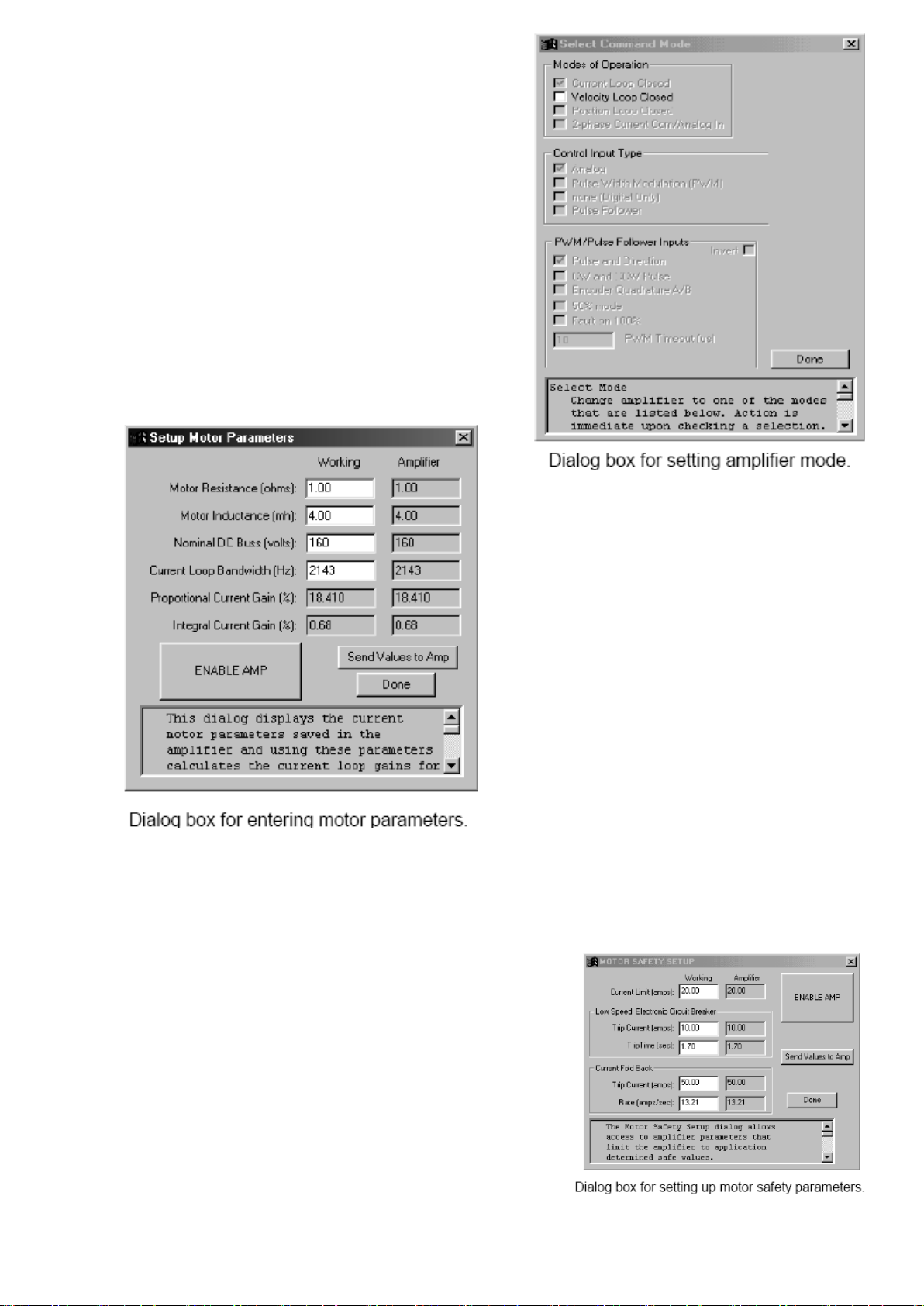
数字化输入/输出设置
数字化输入/输出设置可以用来调制驱动器的数字信号输入,去满足实际应用需求。不正确的设置数字化
输入/输 出信 号, 可能 会导 致 驱动器供 电出 现 故 障 。 ( 或 者更 糟糕 还需复位 )。 要 查 看 此对 话框 , 在
MotionMaestro’s©的主菜单的工具栏中,选择Setup按钮,然后再选择Digital I/O 按钮。数字化输入/输出
信号可以高可以低,主要取决于实际应用。出现故障的情况就是一个很好的例子。从这个窗口,你可以修改你
认为导致出现故障情况的电机参数,可高可低。
在此窗口中有两个复选框,一个Wkg信号,
一个Amp信号。Amp显示 当前驱动器的设置而
Wkg显示用户的选择。当Wkg复选框变化时,Amp
复选框也会随着自动更新。
驱动器模式设置
全功能的驱动器可在位置,电流或速度模
式下运行。通过选择在设置选项目录中的
“Setup Mode...”选项,你就可以设置驱动
器让它按照想要的模式运行。在许多对话框
中,MotionMaestro ©使用模式设置去确定文
本和选项。例如,当欧米茄系列驱动器在电流模式下,和速度环相关的对话框中的参数是不可用的。
14
MotionMaestro ©内部使用机械单元同样被调整,来反映以
此模式为基础的合适单元。
电机参数
在设置目录中选择“Motor Parameter电机参数”按钮,
以此来激活电机参数对话框。电机参数对话框是用来设置
数字化电流环增益的。MotionMaestro©软件将计算基于所
输入的值而产生的电流环增益。在“Setup设置”菜单中选择
“Motor Parameter电机参数”按钮来激活此对话框。
电机的电阻和电感是由相数之间的值来确定的。如果
这些值没有显示在电机铭牌上,你可以确定这些值,通过
测量连接电机的两根电线之间的电阻或电感。额定直流
总线电压被调控为总线电压,一般为160或320伏电压。
电流环带宽是用来衡量电流环效果的一种方式。通常你
想要电流环的值尽可能地高。一个好的开启值为1500
赫兹。为了更新驱动器中的电机参数,驱动器必须在禁
能状态下。你可以通过首先点击“Enable/Disable禁能/
使能驱动器”按钮,然后点击“Send Value To Amp将数
值发送到驱动器中”按钮来完成上述设置。按F1来显示
帮助文本对话框。当把这些数值输入驱动器之后,你就
可以通过开启驱动器来检测这些数值。
电机安全保护
电机安全保护就是输入限位来保护电机的。你可以从设置菜单中找到“Motor Safety Setup电机安全保护设
置”对话框。那有两个设置对话框,一个命名为Working,另一个命名为Amplifier。Amplifier显示当前驱动器设
置而Working显示用户的选择结果。在这里你可以设置最大电流限
位,电流反馈和低速。电机安全保护就是输入限位来保护电机的。
为了更新驱动器中的电机参数,驱动器必须禁能。你可以通过首
先点击“Enable/Disable禁能/使能驱动器”按钮,然后点击“Send
Value To Amp将数值发送到驱动器中”按钮来完成上述设置。按F1
来显示帮助文本对话框。当把这些数值输入驱动器之后,你可以
15
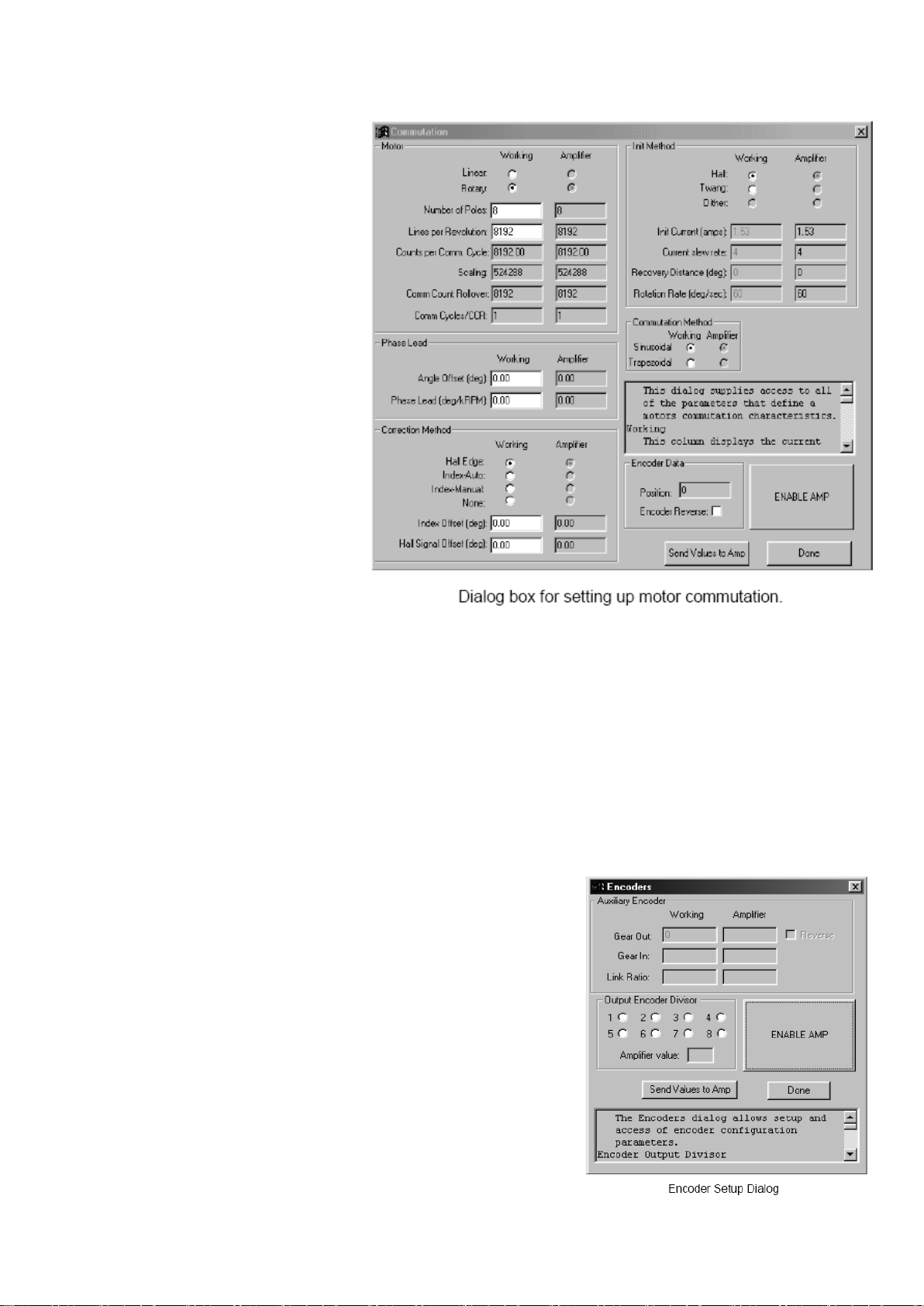
通过开启驱动器来检测这些数值。
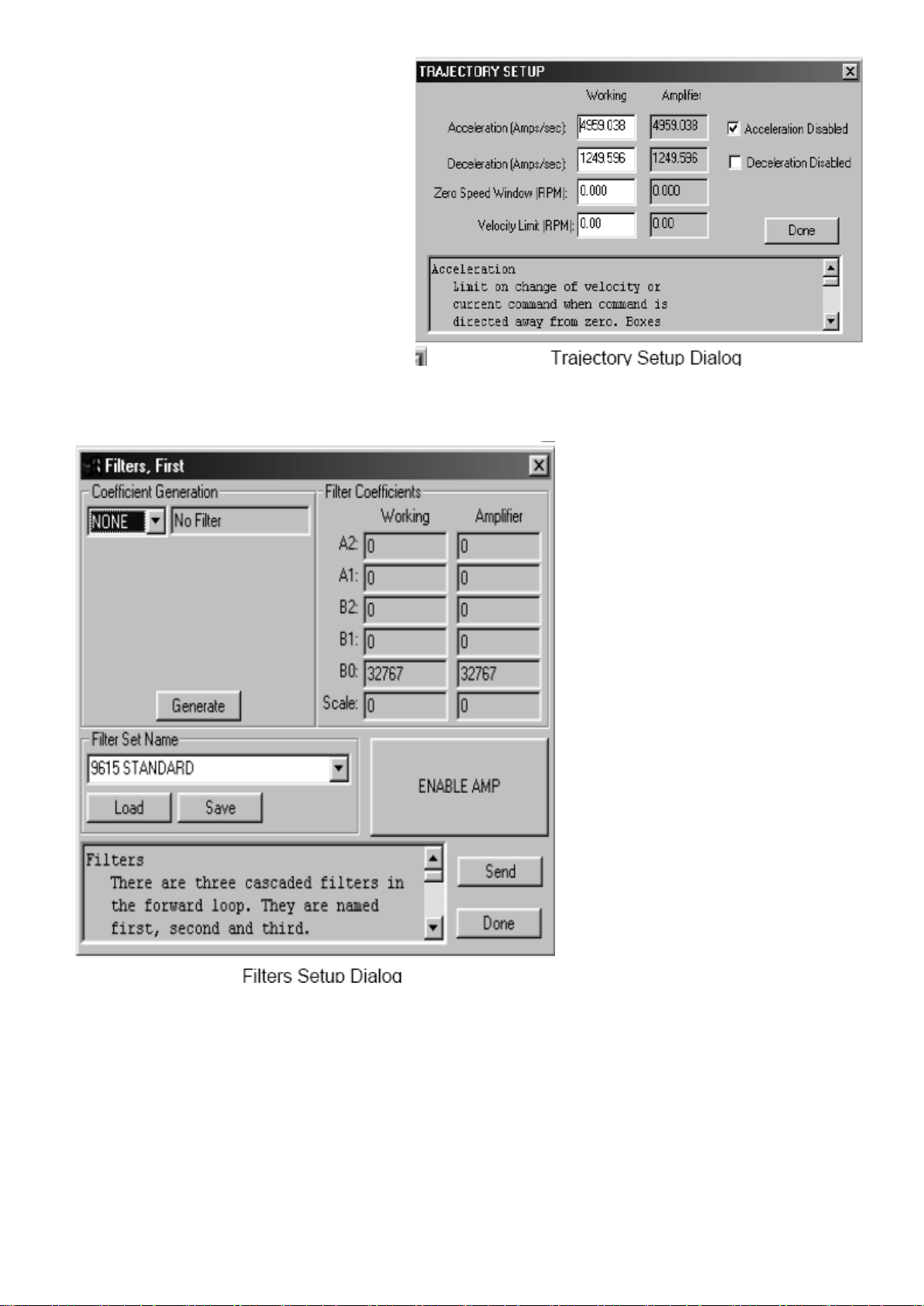
整流设置
整流设 置 窗口可 以让你来 设
置电机整流的特性。在这里你可以
确定电机整流参数,校正,初始化
方法和编码器定位。在电机部分,
大多数对话框是基于你所选择的电
机参数来计算的。在设置菜单中选
择“Communication整流设置”按钮
来激活如右边的对话框。
对于初始设置,大部分整流设
置屏是可以被忽略的。例如,如果
想开启霍儿传感器,它们需要在“初
始方法”菜单下来选择。然后,“霍
尔边缘”需要被选择做为校正类型。
最后,“极数”和“每圈的分辨率”需
要输入。选择线性输入代替旋转输入将会显示特定于线性电机的参数。不可修改参数的编辑框所具有的数值是
由其它输入的参数计算出来的。
编码器或光栅尺的数值和误差是基于电机和编码器所输入的值来自动计算的。当你点击“Send Value To
Amp将数值发送到驱动器中”按钮时,工作列会显示输出给驱动器的值。如果你必须更新整流数值时,驱动器必
须禁能。你可以点击“Enable/Disable禁能/使能驱动器”按钮来禁用驱动器。在整个对话框下面的帮助框中里,
它会描述编辑框的所有参数。 通过点击这个对话框你可以击活它,然后你可以借助上下箭头来流动浏览整个
帮助对话框。按F1键可以查看在记事本中的帮助文本对话框。当给
驱动器输入各项数值之后,你可以通过开启驱动器来检测这些数
值。
编码器
在MotionMaestro©主菜单工具栏中选择“设置”选项,然后再选
择“编码器”,你就可以查看编码器对话框窗口了。编码器对话框允
许进入并且设置编码器配置的参数。编码输出分配器可以在编码输
出连接器和编码输入连接器之间选择倍频比。此外,您可以选择辅
助编码器的线圈数和连接的比率。
16
轨迹生成
轨迹设置对话框可以让 你 限 制速 度
或电流变化的指令。当指令远离0时,电
机“加速”,或当指令指示0时,电机“减
速”。 你 可以 浏 览这 个 对话 框,通 过在
MotionMaestro’s©软件的主菜单的工具栏
上选择设置选项,然后选择“轨迹生成”
选项。
滤波器
你 可 以 浏 览 滤 波 器 对 话 框 , 通 过 在
MotionMaestro’s©软件 的主菜单的工具栏 上
选择“设置”选项,然后选择“Filters...”选
项。在这点上,无论选择四种滤波器中的哪
一种,你都可以浏览这个流程。四个滤波器
中的三个是级联的,它们应用在正向环中,
有一个应用在反馈环中。四个滤波器可以同
时编辑和演示,但一次只能操作一台。从这
些窗口中,MotionMaestro©软件可以让你输
入数值去定义滤波方程。这些方程是由Tustin
转换定义域的各种变量为定义域数字化等式
系数而得到的。产生这些新的系数的第一步
是选择想要的滤波器类型。如LL1,LP1,CLP1
等等。一旦选定滤波器的类型,与之匹配的
输入编辑框将会显示。
17
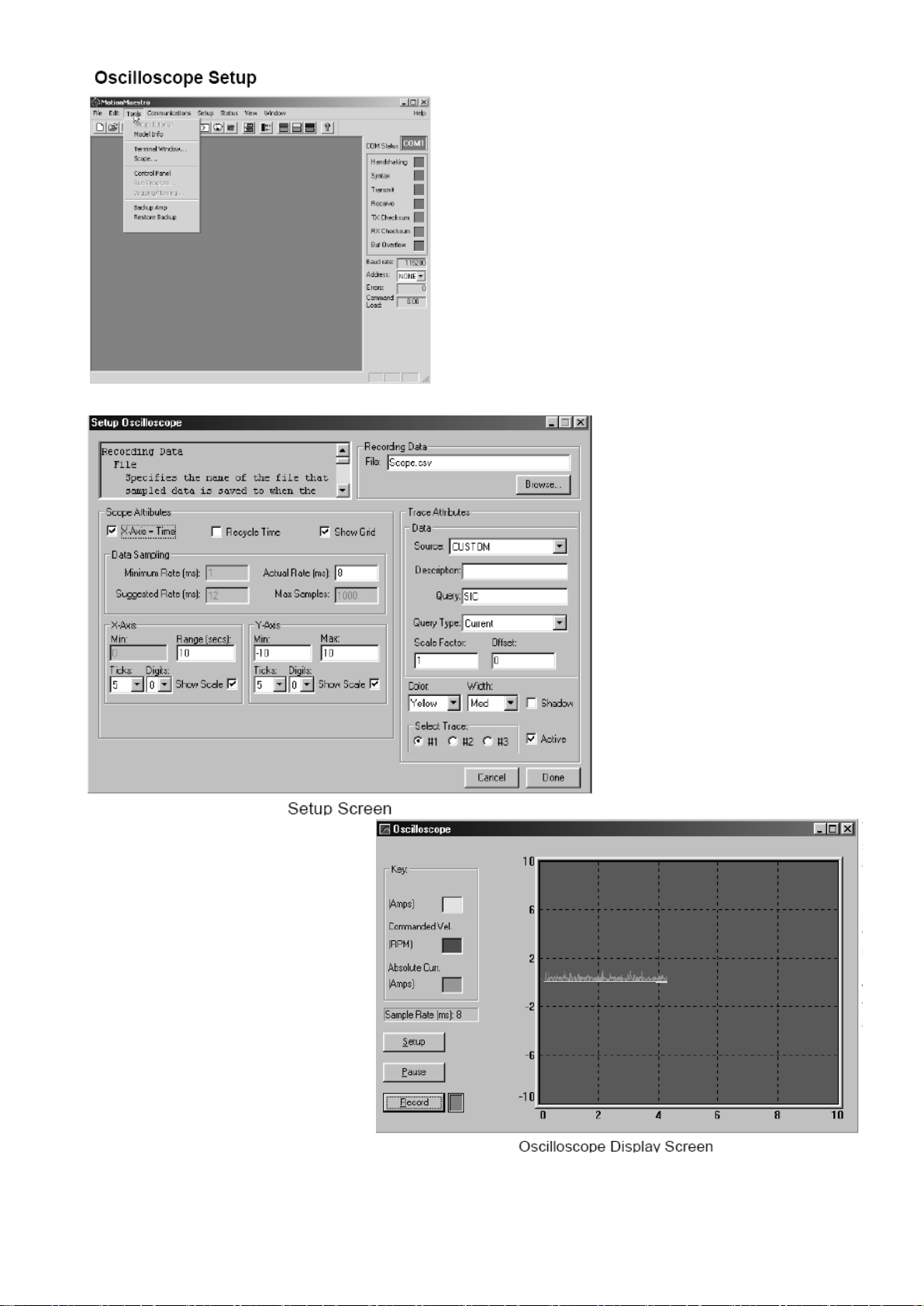
示波器
示波器页面可以通过MotionMaestro’s©软件主菜单的工具
选项进入或者通过工具栏中的一个按钮进入。
在示波器页面下有“设置”窗口和“轨迹演示”窗口。示
波器设置窗口可以设置参数,它们会定义显示在轨迹窗口中的
信号。
“范围属性”定义了演示轨迹中X-Y的属性。例子是X轴=
时间,这将X轴单元设置为时间。 设置范围可以包括X和Y轴,
还有速率参数。
“轨迹属性”改变了数据来源并
且打开或关掉不同的轨迹。你可以一次
监测3个轨迹。在示波器轨迹显示屏中
示波器轨迹显示屏可以显示高
达三种运行中的轨迹。每个轨迹是
以颜色编码和钥匙标记的。为了方
便,样本速率同样会显示。屏幕是
所有轨迹都以颜色编号。保留数据部分
在保存文本数据到文件里时是非常有
用的。"文件”指定用来存数据的文件,
这些数据是当记录按钮在“轨迹显示窗
口”中激活时保存的。在缺省情况下这
些文件会被保存为 .csv文件类型。
当.csv是文件类型时,文件 可 以 使 用
Microsoft Excel查看。
多功能的,它可以调整大小。按下
记录按钮,它将会记下部分轨迹波。
当记录被激活后,在按钮旁会显示
红灯。
18
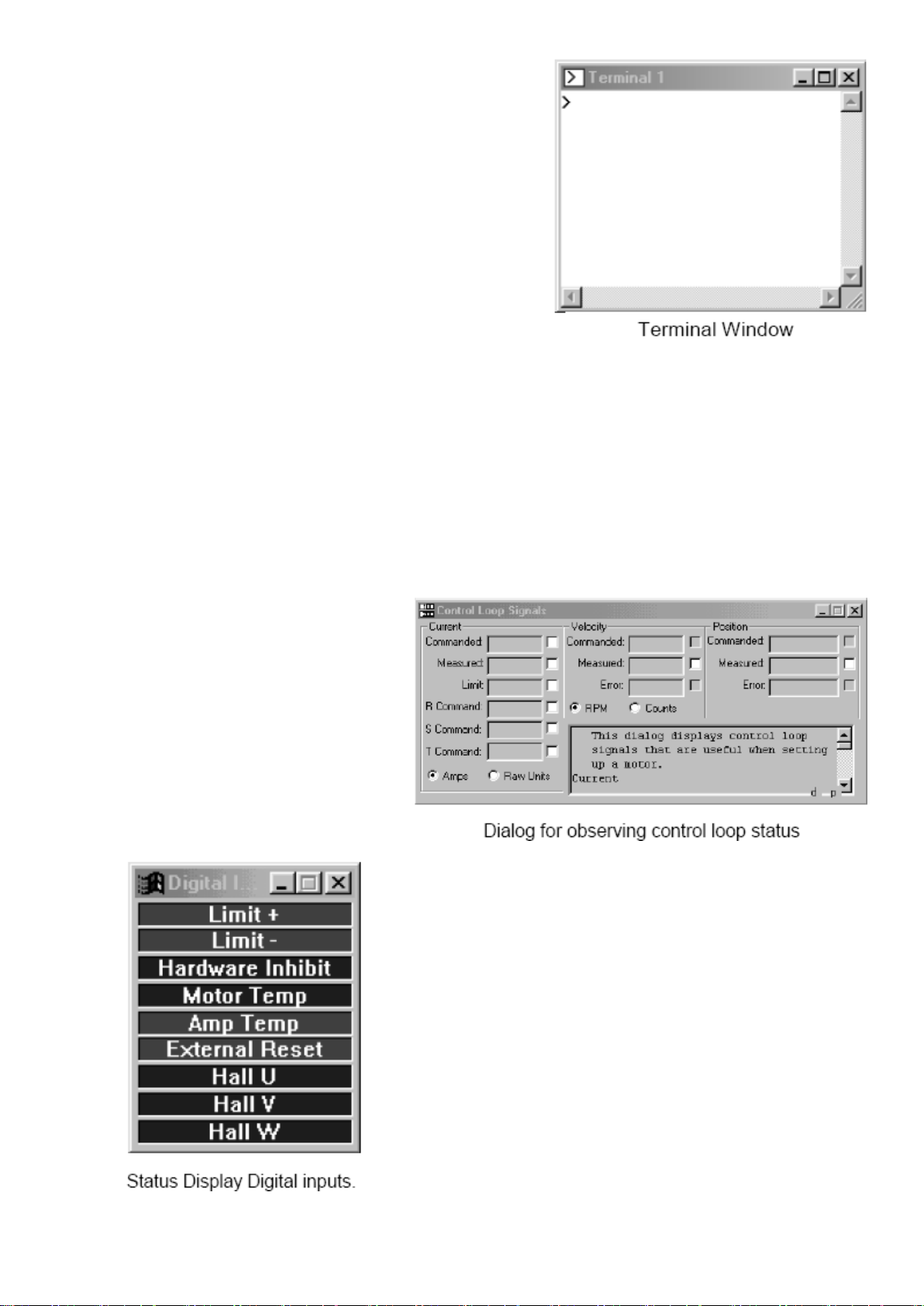
终端窗口
终端窗口可以通过MotionMaestro’s©软件主菜单的工具选
项进入或者通过工具栏中的一个按钮进入。终端窗口可以直接
和电机驱动器通讯。你可以通过键入指令给终端窗口来控制驱
动器。例如,键入BV然后回车键将会发送这个指令请求去读
取电机驱动器上的总线电压。如果你想改变总线电压,你只需
键入BV2000然后按回车键就可以了。这将会改变总线电压为
200伏。查询指令只需要ASCII字母就可以了,而设置指令使用
字母和数值去执行。当窗口被激活后,一定要小心。因为输入的命令可能带来不好的效果。
驱动器的状态
MotionMaestro©软件有一系列状态显示框,它们可以帮助应用工程师去设置调节驱动器或者判断驱动器的
设置。MotionMaestro©被设计为只显示当前适用于目前运行的状态,而不是在一个对话框中显示所有的状态。
这些对话框不停地发送询问信息到驱动器上,以此来确定当前驱动器的状态。当退出显示时,所显示的每个状
态的值会被保存下来。当重新打开状态窗口时,上次保存的值会定位当前窗口。按F1会从当前窗口显示的列表
或状态中得到帮助。
控制环信号
此对话 框 在 决定 驱 动 器的 控 制环是
否在正常运行时是非常有用的。驱动器的
指令和测量的电流值还有电机当前转速
和位置都可以被显示出来。选择“状态/控
制环信号”选项或打开MotionMaestro的工
具条来弹出这个对话框。
数字化输入
此对话框显示了数字化输入到电机驱动器的参数的状态。数字化输
入所输入的是那些把运行或未运行作为特征的输入。他们尤其和控制器
的输入,输出信号引脚有关。请在硬件部分参阅与此相关的引脚,来获
得有关数字化输入影响的描述。选择“Status\Inputs\Digital…”选项或打开
MotionMaestro的工具条来弹出这个对话框。
19
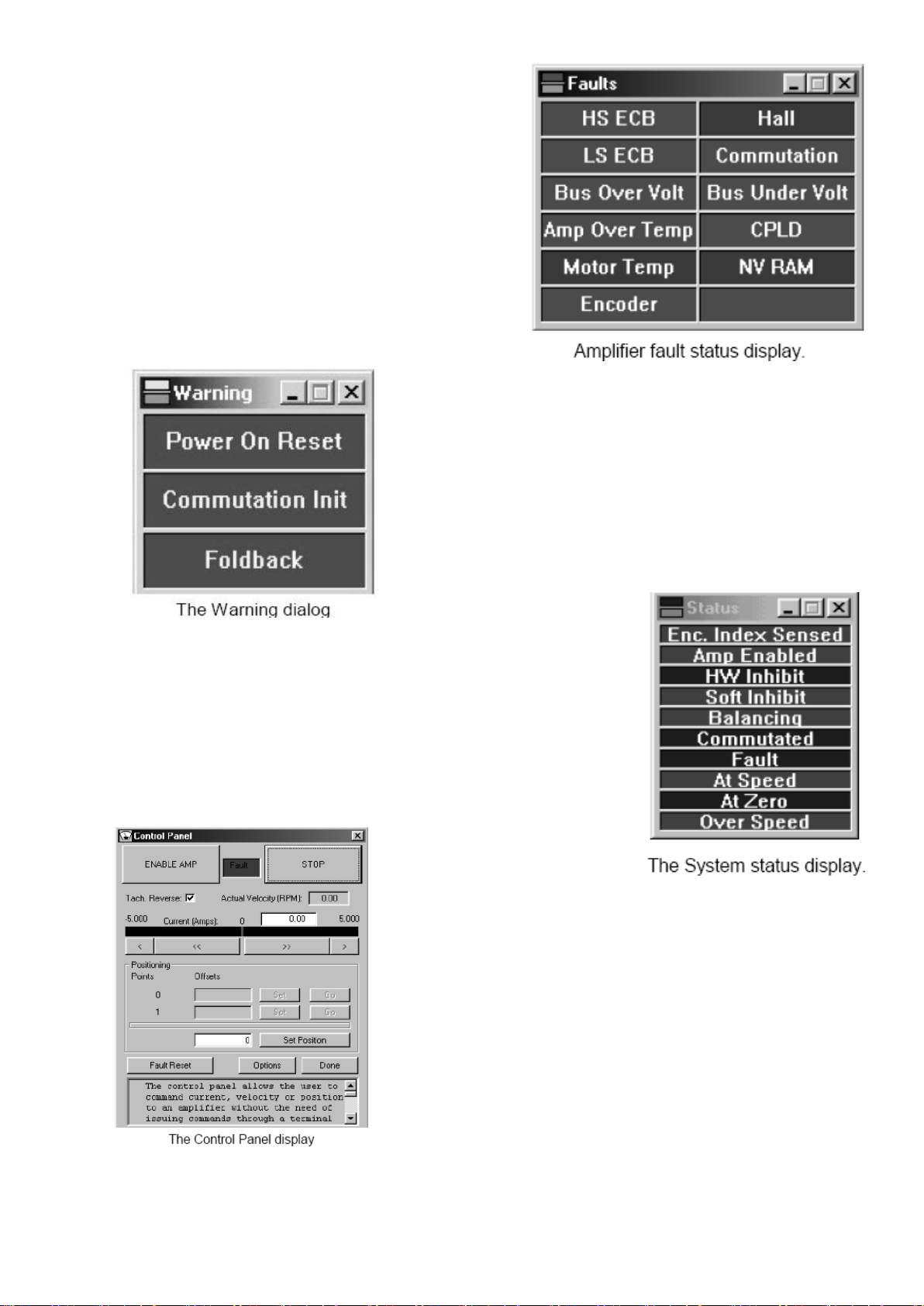
故障
当驱动器在一个安全和稳定的条件下无法运行时,那
么在这种情况下有故障发生。当故障情况发生时,驱动器
会停止运行。该电机驱动器必须重置,用硬件复位开关或
软件(控制面板对话框),或通过外部复位引脚重置。导致
故障的条件:过电流,过高或过低总线电压,工作温度过
高,传感器故障或驱动器硬件故障。一个外部故障可以由
控制器在故障引脚处产生。查阅硬件部分来获得更多的故
障方面的信息。选择“状态\故障”选项或者打开MotionMaestro的工具
栏来弹出此对话框。
警告
警告状态表示电机驱动器在全面运行,但它在一个不寻常的模式或
者值得注意的条件下运行。电流反馈就是这么一种情况。选择
“Status\Warnings„”选项或者打开MotionMaestro的工具栏来弹出此
对话框。
状态
其它没有出现故障或警告的驱动器会在状态框中显示。在运行过程中,
状态显示框在判断,设置或监控驱动器时是非常有用的。选择
“Status\System Status„” 选项或者打开MotionMaestro的工具栏来弹出
此对话框。
控制面板
控制面板可以控制连接好的电
机。控制面板窗口显示了驱动器的所执行的电流,或速度,还有电机的
实际速度。通过控制面板,你可以很容易地控制电机。通过点击“工具”,
下拉菜单或点击控制面板的工具栏图标来进入控制面板。
通过点击“Set Position”按钮你可以调节位置偏移或精确定位。
选项按钮
将允许您设置最大和最小的电流,速度和位置。
20
 Loading...
Loading...