


GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 1
AC-23 Accelerometer
User Manual
Company:
GeoSIG Ltd
Wiesenstrasse 39, 8952 Schlieren, Switzerland
Tel: +41 44 810 21 50, Fax: +41 44 810 23 50, E-mail: info@geosig.com
Author:
Serge Rudaz
Checked:
Markus Epp
Approved:
Johannes Grob
Distribution:
GeoSIG Ltd (1), Customer on request
GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 2
DOCUMENT REVISION
Date
Version
Author
Checked
Description
15.04.95
0
SR
JP
Created
11.04.00
1
JG
GCO
Format/Font changes
05.07.01
2
SR
JG
Update pictures and connector description for new 12 poles
version.
Added principle of operation.
30.05.2003
3
LG
JG
Changes for new housing
06.06.2003
4
LG
JG
Corrected axis polarity for new housing. Movement in axisdirection gives positive response.
05.12.2003
5
SR
JG
Updated
21.04.2004
5
JG
JG
Reformatted
05.05.2006
6
SR
JG
Adapted to new DH housing
12.12.2007
7
TB
TB
Adapted to new sensor housing
File name and title change
13.12.2007
8
TB
TB
Detailed sensor full scale & offset adjustment
18.03.2011
9
THL
TAB
Board connector pinning added
05.08.2013
10
JLT
MAE
Update PCB to V3 and orientation of axis
15.10.2014
11
SER
MAE
Adjusted formatting of figures.
29.07.2015
12
PAT
JON
Picture update
07.05.2019
13
VAG
ALB
Mounting section updated
27.05.2019
14
JOG
TAB
P/N correction on item 1.2

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 3
TABLE OF CONTENT
1 ELECTRICAL CONNECTION................................................................................................................... 4
1.1 MAIN CONNECTOR PIN ASSIGNMENT ........................................................................................................ 4
1.2 MATING CONNECTOR ............................................................................................................................... 4
2 MOUNTING ............................................................................................................................................... 5
3 THEORY OF OPERATION ....................................................................................................................... 6
3.1 INTRODUCTION ........................................................................................................................................ 6
3.2 PRINCIPLE ............................................................................................................................................... 6
3.3 BASIC SPECIFICATIONS ............................................................................................................................ 7
4 ELECTRICAL CONFIGURATION ............................................................................................................ 8
5 OFFSET ADJUSTMENT:.......................................................................................................................... 9
6 MOUNTING (DOWNHOLE SENSOR) .................................................................................................... 10
6.1 BOREHOLE PREPARATION ...................................................................................................................... 10
6.2 INCLINOMETER TUBE INSTALLATION ........................................................................................................ 11
6.3 SENSOR INSTALLATION .......................................................................................................................... 12
6.4 INCLINOMETER CASING ASSEMBLY .......................................................................................................... 13
6.5 AXIS ORIENTATION ................................................................................................................................. 15
7 INSTALLATION VERIFICATION ............................................................................................................ 15
The sensor housing provides no protection against explosive atmosphere. It must not be directly operated in
area where explosive gases are present.

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 4
1 Electrical Connection
1.1 Main Connector Pin Assignment
All the AC-2X accelerometers use the same 12 pins male metallic style connector as the AC-43 and AC-63.
The connector pins standard assignments are as follows:
Pin
SIGNAL
Comment
Colour
1
OUTPUT X (+)
0 V ± 5 V voltage output, 47 output impedance
White
2 OUTPUT X (-)
0 V ± 5 V voltage output inverted, 47 output impedance
Brown
3 OUTPUT Y (+)
0 V ± 5 V voltage output, 47 output impedance
Green
4 OUTPUT Y (-)
0 V ± 5 V voltage output inverted, 47 output impedance
Yellow
5
OUTPUT Z (+)
0 V ± 5 V voltage output, 47 output impedance
Grey
6
OUTPUT Z (-)
0 V ± 5 V voltage output inverted, 47 output impedance
Pink
7
TEST INPUT
Test input, output will result in a sensor step response
Blue
8 GROUND
Ground, not connected to mechanical ground
Red 9
+12 VDC power
Power input, +10 to +15 VDC range, 50 mA @ +12 VDC
Black
10
GROUND
Ground, not connected to mechanical ground
Violet
11
AUX
Auxiliary input (reserved)
- 12
GROUND
Ground, not connected to mechanical ground
-
Table 1 AC-2X Connector Pin Assignment
In case no connector is mounted at the cable end (like usually for down-hole version), the colour code is
given in the above table.
1.2 Mating connector
GeoSIG
P/N #J_CIR.012.007.F
CONINVERS
P/N RC 12 S 1 N 12L 300
Binder Serie 623
P/N 99-4622-00-12
Figure 1, Mating connector
Cable gland nut has to be determined as per cable external diameter and must be separately ordered. It has
also to provide the cable shield connection to connector case.

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 5
2 Mounting
Figure 2, AC-2X housing
Small size and single bolt attachment allow the AC-2X to be easily installed saving installation time. Levelling
is accomplished via three-point levelling screws.
a
Do not overtighten the three-point levelling mechanism. This may damage the sensor.
165.0
68.0
40.0
23.0
20.0
R 1.5
195.0
14.0
28.0
181.5
15.0
4.0
10.0
41.0
112.0
80.0
96.0
99.0
16.0
6.0
15.0
165.0
6.0
3 x M6
ø 15
152.0
15.0
ø9
R 3.0
R 3.0
R 1.5
R 6.5
76.0
41.0
56.0
19.0
+0.1
-0.0
20.3
+0.2
-0.2
Minimum Space Allowance for the Connector and Cable:
Sensor with Connector: 300 mm from sensor housing
Sensor with Cable Inlet: 200 mm from sensor housin
*
*
Figure 3, Sensor housing dimensions
The accelerometers must be firmly mounted to a surface and levelled, as the application requires. Check to
be sure that the accelerometer is aligned to produce the desired output signals. Acceleration in the direction
indicated on the case will produce a positive output signal. The orientation definitions as shipped are:
X = East, Y = North and Z = Vertical (Up).
The accelerometer has single-bolt, 3-feet-levelling mechanism.
GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 6
The surface should have a scribed north/south orientation line accurately surveyed from reliable markers.
The X-axis of the sensor has to be pointed to East or to any other main direction of the structure to monitor.
One M8 expanding nut rock anchor must be used for the sensor fixation.
3 Theory of operation
3.1 Introduction
The AC-23 sensor package is a triaxial accelerometer designed for free field and industrial applications
regarding STRONG-MOTION earthquake survey, monitoring and research. This sensor is well suited for
applications where a high sensitivity is required.
The AC-23 sensor can be optionally installed into a rugged protective housing. This optional protective
housing is in stainless steel for optimal environmental resistance. As option, the protective housing could be
executed with an IP68 grade for Free field location where the possibility exists of housing submersion.
The sensor could be installed on floor or wall with a modification of the axis organization. With the help of the
TEST LINE, the complete sensor can be very easily completely tested. Full scale can be field selected by the
user with jumpers.
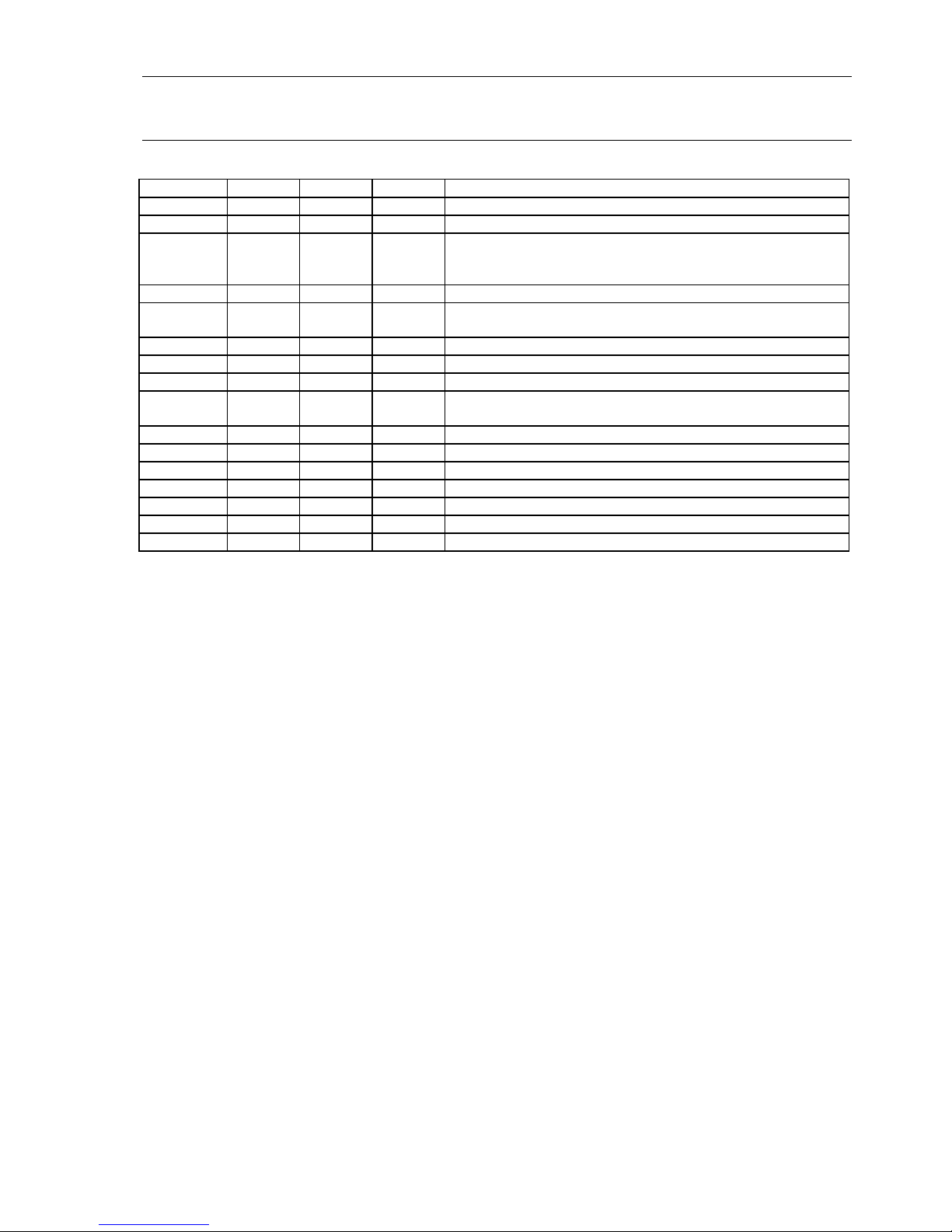
3.2 Principle
The accelerometer is based on a geophone mass-spring system with electronic correction. This type of
sensors gives a very good stability in temperature and aging because of the very simple principle. It uses a
damped mass spring oscillator called "Geophone" to convert seismic movement into electrical value
proportional to the velocity. In a graphic with constant acceleration, the geophone response will present a
maximum at the frequency called "Natural Frequency" which is the resonant frequency of the mass-spring
oscillator. Above and below this point, the response will decay with one pole slope (±20 dB / decade). The
corrector will over-damp the geophone by applying a voltage with opposite polarity over the geophone and
the output response will be flat and proportional to the acceleration in this frequency band.
Motion on
the X axis
geophone
4.5 Hz
Note : all inputs, outputs & power supply entry are surge protected.
Feedback
amplifier
Low pass
filter
Output
amplifier
Differential
Output to
recorder
Test input
Pulse
scaling
Motion on
the Y axis
geophone
4.5 Hz
Feedback
amplifier
Low pass
filter
Output
amplifier
Differential
Output to
recorder
Motion on
the Z axis
geophone
4.5 Hz
Feedback
amplifier
Low pass
filter
Output
amplifier
Differential
Output to
recorder
Power
supply
9/15 Vdc
+8 V
- 8 V
Figure 4 AC-23 Sensor block diagram
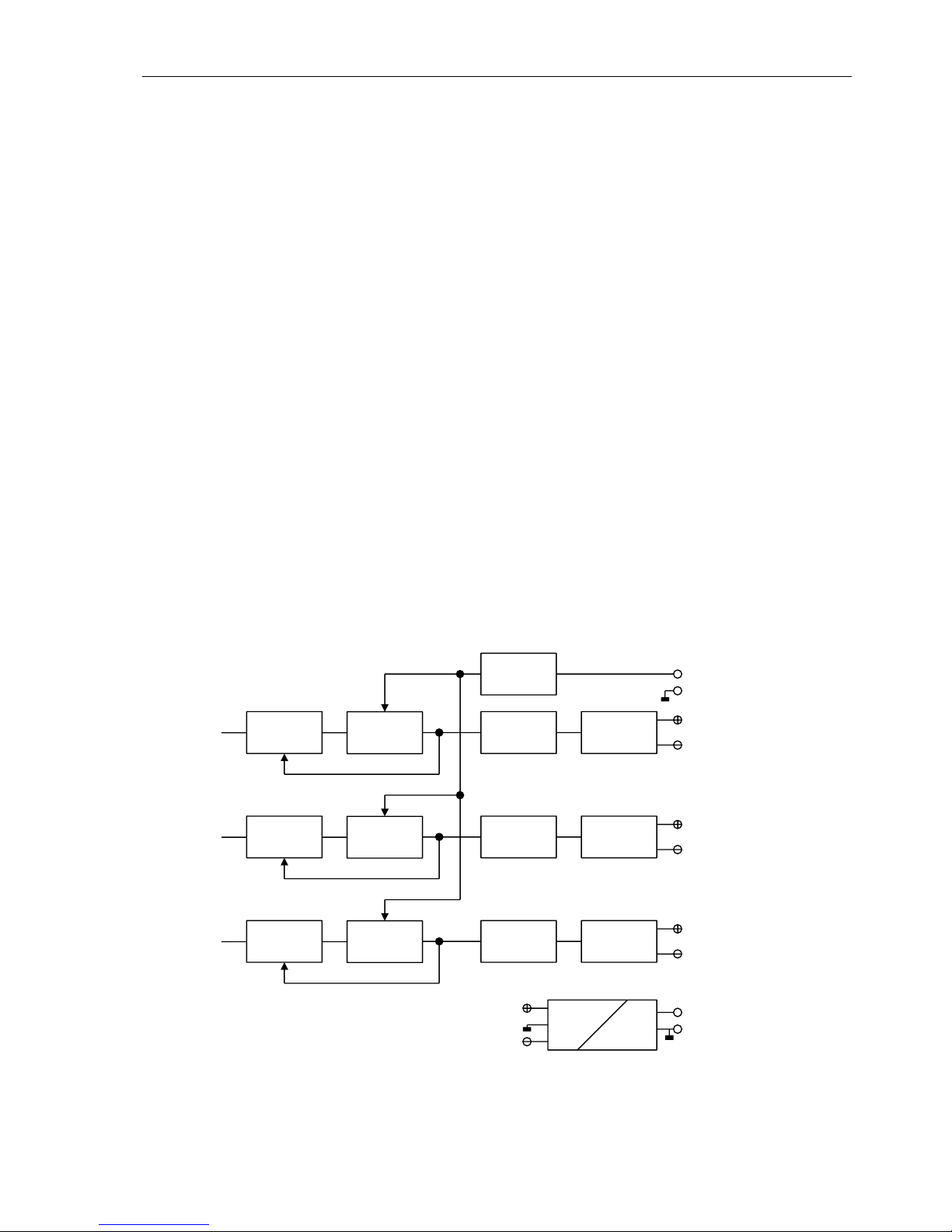
The geophone is connected in a resistor bridge, driven by a feedback amplifier, which applies the amplified
bridge differential signal in opposite polarity. The bridge is balanced during calibration. The test-line shifts the
voltage at one side of the bridge, which produces a current flow in the geophone.
GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 7
This current flowing in the Geophone will move the seismic mass. The movement of the mass generates a
voltage across the Geophone, which is detected by the differential amplifier and induces an output signal.
TEST LINE
GEOPHONE
OUTPUT
Feedback loop
Amplifier
Inverter
Figure 5 TEST INPUT configuration
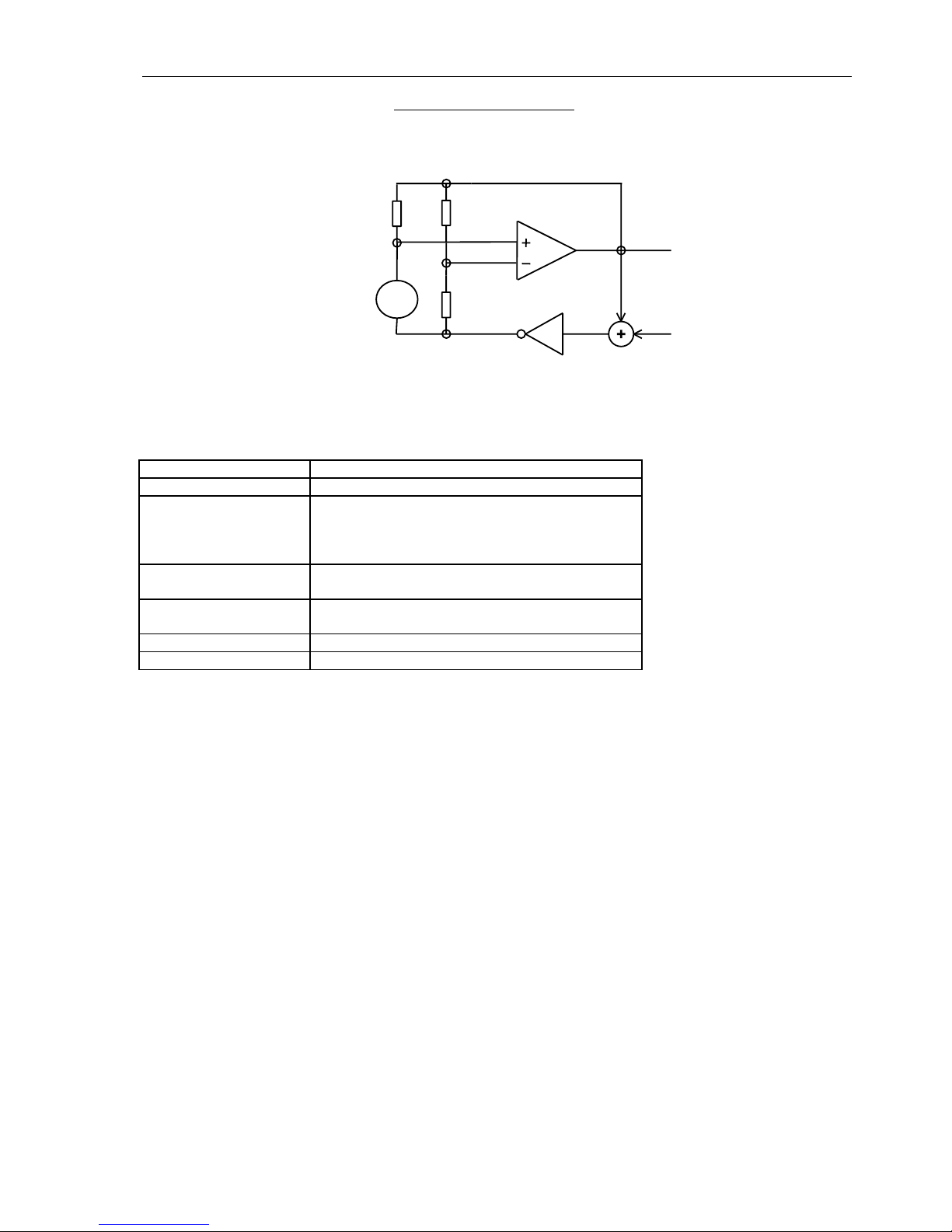
3.3 Basic specifications
Detailed specifications
AC-23
Input range
Acceleration, ±0.2, ±0.5, ±1.0 g, ±2.0 g or ±4.0 g
Output range
0 ± 10 Volt differential output OR
0 ± 5 Volt differential output OR
2.5 ± 2.5 Volt single-ended output OR
0 – 20 mA Current-loop (OPTION)
Frequency range
from 0.1 Hz to 100 Hz
(optional 200 Hz)
Protections
All connectors pins protected by Transzorb
diodes and VDR
Power supply
10 – 15 VDC
Current drain
Typical 30 mA @ 12 VDC

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 8
4 Electrical configuration
The full scale can be adjusted without gain re-calibration by means of jumpers with fixed 0.1% precise
amplifiers.
Figure 6, Full scale setting
The full scale adjustment can be:
Full scale Jumper position
0.1 g 1-2
0.2 g 3-4
0.5 g 5-6
1.0 g 7-8
2.0 g 9-10
4.0 g 11-12
Full scale Y:
1-2: +/- 0.1 g
3-4: +/- 0.2 g
5-6: +/- 0.5 g
7-8: +/- 1.0 g
9-10: +/- 2.0g
11-12: +/- 4.0g
Full scale Z:
1-2: +/- 0.1 g
3-4: +/- 0.2 g
5-6: +/- 0.5 g
7-8: +/- 1.0 g
9-10: +/- 2.0g
11-12: +/- 4.0g
Full scale X:
1-2: +/- 0.1 g
3-4: +/- 0.2 g
5-6: +/- 0.5 g
7-8: +/- 1.0 g
9-10: +/- 2.0g
11-12: +/- 4.0g
Z
Y
X

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 9
5 Offset adjustment:
Figure 7, Offset potentiometer location
After the new full scale has been selected, the offset must be checked and eventually the potentiometer °
must to be re-adjusted to remove any small offset change at output.
In such case, be sure be sure to identify correctly the offset potentiometers and don't touch any other
potentiometers as it would void its calibration.
Connect a Digital Voltmeter (DVM) as shown on the above figure and adjust the offset potentiometers so that
the DVM readings stay within the ranges indicated in the following table, according to the sensor output
range given in Section 3.3:
Sensor Label*
Sensor Output Range
DVM Reading
±10 Volts
0 ± 10 Volt differential output
0.00 ±0.05 V
±5 Volts
0 ± 5 Volt differential output
0.00 ±0.05 V
2.5 ±2.5 Volts
2.5 ± 2.5 Volt single-ended output
2.50 ±0.02 V
10 ±10 mA
0 - 20 mA Current-loop (OPTION)
2.50 ±0.02 V
1
*:The output range is written on the sensor label.
1
The DVM must be connected on the load (at recorder) for current loop.
DVM
+
Offset
Adjust
Pin 12
Pin 1
Z Y X

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 10
6 Mounting (downhole sensor)
The sensor must be installed in a 3-inch inclinometer tube. At least a 100 mm
borehole must be drilled. Depending on the soil condition, it could be required
to drill a higher dimension hole and to implement a 120 mm PVC casing to
insure a free path when the inclinometer tube is inserted in the borehole.
6.1 Borehole preparation
Note: Do not scale the drawing.
Do not allow concrete mix from casing sealing to enter the casing.
Cap
Casing
sealing
PVC tubing
Minimum free
diameter inside
casing: 120 mm.
Depth of drilled borehole
12 cm
Surface level

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 11
6.2 Inclinometer tube installation
Note: Do not scale the drawing. The number of sections is only an example.
30 cm
Inclinometer tube
in 3 meters
section.
Coupling elements,
fixed with “pop”
rivets. Must be fully
sealed to avoid any
concrete inside the
tube.
Bottom cap.
Must be fully
sealed to avoid any
concrete inside the
tube.
Sealing
(concrete
mix) of tube
3 meters
GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 12
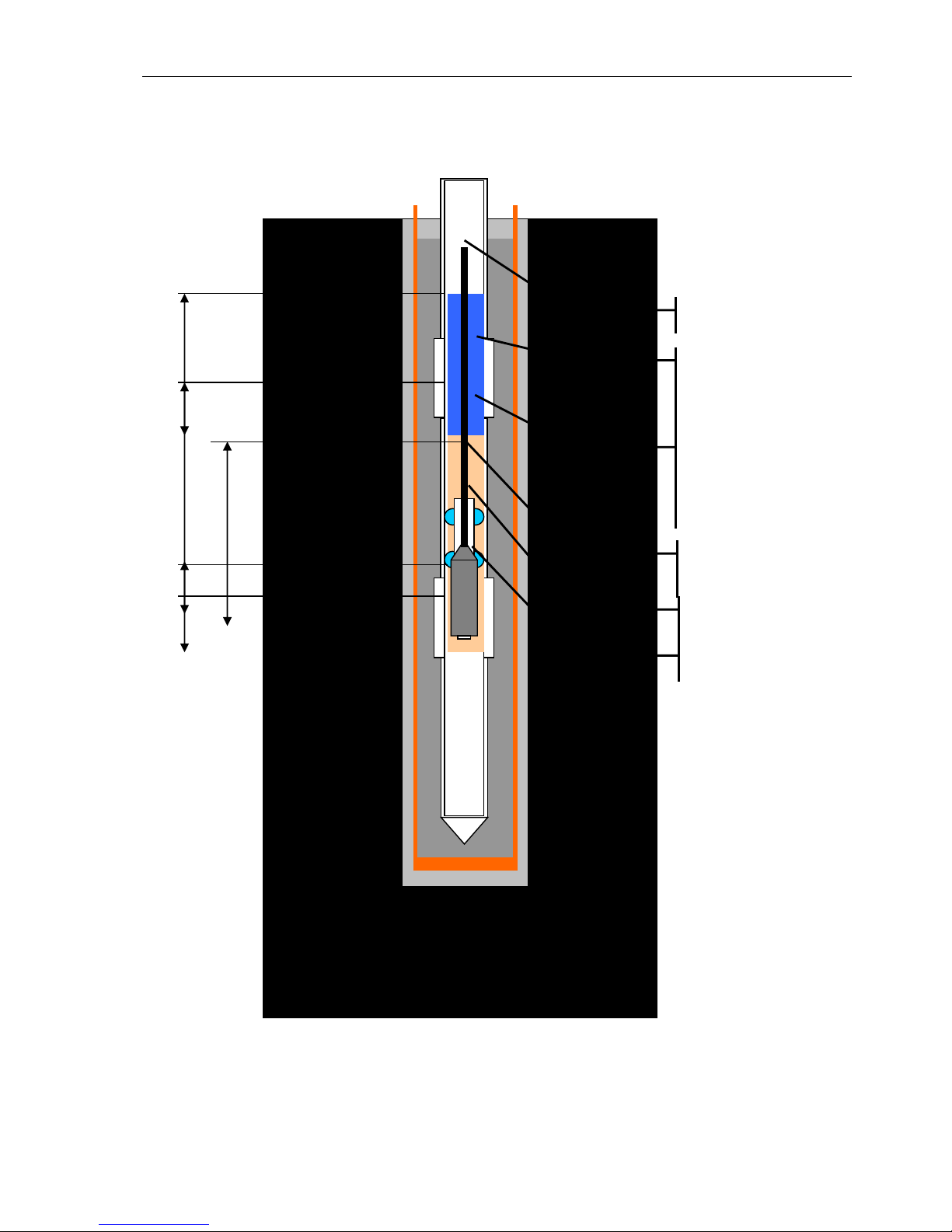
6.3 Sensor installation
Note: Do not scale the drawing. The number of sections is only an example.
About 70 cm
Sand (50 cm)
Guiding system
Sensor AC-23-DH,
diameter 54 mm.
Cable
Concrete sealing of
sensor. At least 1
meter above the
sensor.
The maximum water
level above the
sensor must be
maximum 50
meters.
50 m maximum
About 50 cm About 170 cm
GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 13
6.4 Inclinometer casing assembly
The borehole must have a casing or the soil must insure that a free path for the inclinometer tube is
warranted. It is recommended to insert the inclinometer tube as soon the borehole is ready.
The free path for the inclinometer tube should be 10 to 15 cm, 12 cm typically.
It could be required to insert some water in the casing to sustain the water pressure at the bottom of the
borehole.
The inclinometer tube should be mounted with a maximum deviation of ±1° / 3 meters and with a maximum
deviation from vertical at sensor location of ±3°. The functional limit for the sensor is ±9°.
The water level in the inclinometer tube should be maximum 50 meters, including fast elevation due to heavy
rain.
It is recommended to use the optional assembly kit that GeoSIG can provide (optional) with the inclinometer
tube. It will insure a perfect sealing of the tube elements and would avoid concrete mix to enter the tube.
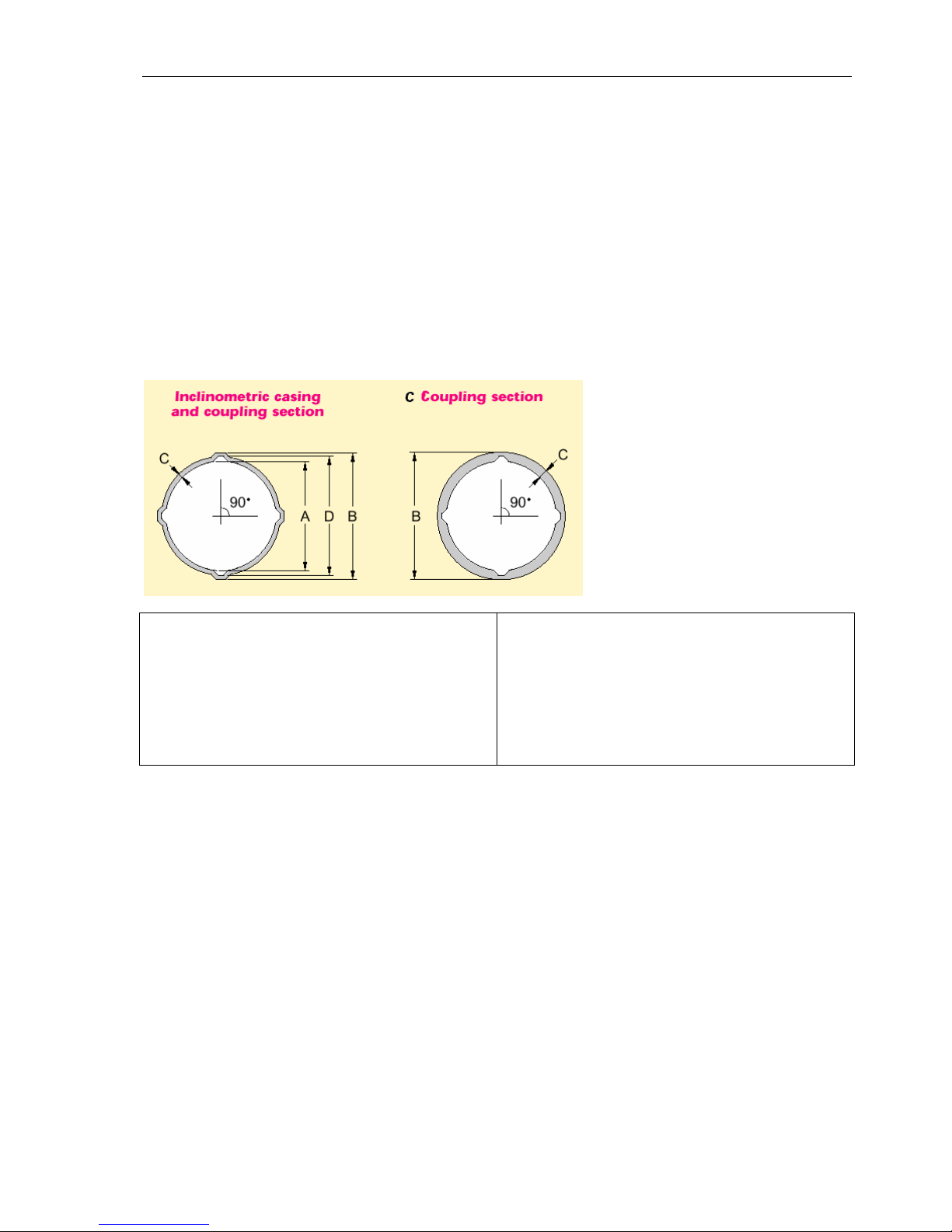
The dimensions of the inclinometer tube are:
INCLINOMETRIC CASING (3 m section)
A Inner diameter 76.1 mm
B Groove outer diameter 86.4 mm
C Thickness 2.2 ±0.1 mm
D Groove inner diameter 82.0 mm
Length 3 meters
Weight 1.4 Kg/m
Borehole diameter > 120 mm
COUPLING ELEMENT
A Inner diameter 81.0 mm
B Outer diameter 92.0 mm
C Thickness 2.2 mm
D Groove inner diameter 87.6 mm
Length 300 mm
Weight 0.5 kg

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 14
The following elements will be inserted in the borehole.
Figure 8
Torpedo (the sensor and its cable)
Figure 9
Guiding system
Figure
10
Inclinometer tube

GeoSIG Ltd GS_AC-23_UserManual_V14.docx/27.05.2019
AC-23 Accelerometer Manual Page 15
6.5 Axis orientation
Figure 11, Down hole axis orientation
Before the sensor is inserted in the inclinometer tube, the guiding system must be mounted bellow it. The
guiding system must be orientated before the insertion.
The engraved mark on bottom cover is showing the positive direction of X axis:
View for top:
7 INSTALLATION VERIFICATION
Please note that temperature compensation device is mounted for each axis inside the sensor and that the
temperature in the sensor has to stabilize before accurate measurement can be done. Allow at least half an
hour for temperature stabilization.
Mark
Y axis
X axis
Z axis:
Vertical,
positive up
X axis
Engraved
mark
Y axis
Z axis
 Loading...
Loading...