


GE Consumer & Industrial
Electrical Distribution
AF-650 GP
TM
General Purpose Drive
Design Guide
Contents
AF-650 GP Design Guide
1 How to Read this Design Guide
How to Read this Design Guide 5
Symbols 5
Abbreviations 6
Definitions 6
2 Safety and Conformity
Safety Precautions 11
Aggressive Environments 14
3 Introduction to AF-650 GP
Product Overview 15
Control Principle 17
AF-650 GP Controls 17
Control Structure in Advanced Vector Control 18
Control Structure in Flux Sensorless 19
Control Structure in Flux with Motor Feedback 20
Internal Current Control in Advanced Vector Control Mode 20
5
11
15
Local (Hand) and Remote (Auto) Control 21
Reference Limits 23
Scaling of Preset References and Bus References 23
Scaling of Analog and Pulse References and Feedback 24
Dead Band Around Zero 24
Speed PID Control 27
Process PID Control 30
Ziegler Nichols Tuning Method 34
EMC Test Results 36
PELV - Protective Extra Low Voltage 38
Brake Functions in AF-650 GP 40
Mechanical Holding Brake 40
Dynamic Braking 40
Selection of Brake Resistor 40
Mechanical Brake Control 43
Hoist Mechanical Brake 44
Safe Stop of AF-650 GP 48
4 AF-650 GP Selection
Electrical Data - 200-240 V 53
Electrical Data - 380-480 V
Electrical Data - 525-600 V 61
Electrical Data - 525-690 V 64
53
55
1
AF-650 GP Design Guide
General Specifications 71
Acoustic Noise 77
du/dt Conditions 77
Special Conditions 81
Automatic Tuning to Ensure Performance 88
5 Mechanical Installation - Unit Sizes 1, 2 and 3
6 Mechanical Installation - Unit Size 4, 5 and 6
Pre-installation 93
Planning the Installation Site 93
Receiving the Frequency Converter 93
Transportation and Unpacking 93
Lifting 94
Mechanical Dimensions 96
Mechanical Installation 103
Terminal Locations - Unit Size 4X 105
Terminal Locations - Unit Size 5X 106
Terminal Locations - Unit Sizes 6X 108
Cooling and Airflow 111
7 Electrical Installation
Connections- Unit Sizes 1x, 2x and 3x 117
Connection to Mains and Earthing 118
89
93
117
Motor Connection 121
Relay Connection 124
Connections - Unit Sizes 4, 5 and 6 125
Power Connections 125
Fuses 133
Disconnectors, Circuit Breakers and Contactors 140
Motor Bearing Currents 141
Control Cables and Terminals 141
Control Cable Routing 142
Control Terminals 143
Switches S201, S202, and S801 144
Electrical Installation, Control Terminals 145
Basic Wiring Example 146
Electrical Installation, Control Cables 147
Additional Connections 149
How to Connect a PC to the Frequency Converter 151
The AF-650 GP PC Software 151
Residual Current Device 156
2
AF-650 GP Design Guide
Final Setup and Test 157
8 Application Examples
Encoder Connection 160
Encoder Direction 160
Closed Loop Drive System 161
Programming of Torque Limit and Stop 161
Advanced Mechanical Brake Control for Hoisting Applications 162
Auto Tune 163
Logic Controller Programming 163
LC Application Example 164
Torque Control Open Loop 165
9 Options and Accessories
Mounting of Option Modules in Slot A 167
Mounting of Option Modules in Slot B 167
General Purpose Input Output Module OPCGPIO 168
OPCENC Encoder Option Module 171
OPCRES Resolver Option Module 173
OPCRLY Relay Option Module 174
159
167
OPC24VPS 24V DC External Supply Module 176
Brake Resistors 177
Remote Mounting Kit for Keypad 177
IP21/IP 4X/ TYPE 1 Unit Kit 179
Sine-wave Filters 180
10 RS-485 Installation and Set-up
RS-485 Installation and Set-up 181
Network Configuration 183
Drive Protocol Message Framing Structure - AF-650 GP 183
Examples 188
Modbus RTU Overview 190
Modbus RTU Message Framing Structure 191
How to Access Parameters 195
GE Drive Control Profile 196
Index
181
206
3

1
AF-650 GP Design Guide
4
AF-650 GP Design Guide
1 How to Read this Design Guide
1.1.1 How to Read this Design Guide
This Design Guide will introduce all aspects of your AF-650 GP.
Available literature for AF-650 GP
- The AF-650 GP Operating Instructions DET-607 provide the neccessary information for getting the drive up and running.
- The AF-650 GP High Power Operating Instructions DET-608
- The AF-650 GP Design Guide DET-619 entails all technical information about the drive and customer design and applications.
- The AF-650 GP Programming Guide DET-618 provides information on how to programme and includes complete parameter descriptions.
- The AF-650 GP Profibus Operating Instructions DET-629 provide the information required for controlling, monitoring and programming the drive via a
Profibus network.
- The AF-650 GP DeviceNet Operating Instructions DET-623 provide the information required for controlling, monitoring and programming the drive via
a DeviceNet network.
GE technical literature is also available online at www.geelectrical.com/drives
1.1.2 Symbols
1
Symbols used in this guide.
NB!
Indicates something to be noted by the reader.
Indicates a general warning.
Indicates a high-voltage warning.
Indicates default setting
*
5
1.1.3 Abbreviations
AF-650 GP Design Guide
1
Alternating current AC
American wire gauge AWG
Ampere/AMP A
Current limit I
Degrees Celsius °C
Direct current DC
Drive Control Tool PC Software DCT 10
Drive Dependent D-TYPE
Electro Magnetic Compatibility EMC
Electronic Thermal Overload Elec. OL
Gram g
Hertz Hz
Kilohertz kHz
Meter m
Millihenry Inductance mH
Milliampere mA
Millisecond ms
Minute min
Nanofarad nF
Newton Meters Nm
Nominal motor current I
Nominal motor frequency f
Nominal motor power P
Nominal motor voltage U
Parameter par.
Protective Extra Low Voltage PELV
Printed Circuit Board PCB
Rated Inverter Output Current I
Revolutions Per Minute RPM
Regenerative terminals Regen
Second s
Synchronous Motor Speed n
Torque limit T
Volts V
LIM
M,N
M,N
M,N
M,N
INV
s
LIM
1.1.4 Definitions
Frequency converter:
Coast
The motor shaft is in free mode. No torque on motor.
I
DRIVE,MAX
The maximum output current.
I
DRIVE,N
The rated output current supplied by the frequency converter.
U
DRIVE, MAX
The maximum output voltage.
Input:
Control command
Start and stop the connected motor by means of Keypad and the digital in-
puts.
Functions are divided into two groups.
Functions in group 1 have higher priority than functions in group 2.
Motor:
f
JOG
The motor frequency when the jog function is activated (via digital terminals).
Group 1
Group 2 Start, Pulse start, Reversing, Start reversing,
Reset, Coasting stop, Reset and Coasting stop,
Quick-stop, DC braking, Stop and the "Off" key.
Jog and Freeze output
6
AF-650 GP Design Guide
f
M
Motor frequency. Output from the frequency converter. Output frequency is related to the shaft speed on motor depending on number of poles and slip frequency.
f
MAX
The maximum output frequency the frequency converter applies on its output. The maximum output frequency is set in limit par. F-16, F-17 and F-03.
f
MIN
The minimum motor frequency from frequency converter. Default 0 Hz.
f
M,N
The rated motor frequency (nameplate data).
I
M
The motor current.
I
M,N
The rated motor current (nameplate data).
n
M,N
The rated motor speed (nameplate data).
n
s
Synchronous motor speed
2×
par. F
n
=
s
P
M,N
par
− 04 × 60
. P− 01
The rated motor power (nameplate data).
s
1
T
M,N
The rated torque (motor).
U
M
The instantaneous motor voltage.
U
M,N
The rated motor voltage (nameplate data).
Break-away torque
DRIVE
The efficiency of the frequency converter is defined as the ratio between the power output and the power input.
Start-disable command
A stop command belonging to the group 1 control commands - see this group.
7
AF-650 GP Design Guide
Stop command
See Control commands.
1
References:
Advanced Vector Control
If compared with standard voltage/frequency ratio control, Adv. Vector Control) improves the dynamics and the stability, both when the speed reference is changed
and in relation to the load torque.
Analog Reference
An analog signal applied to input 53 or 54. The signal can be either Voltage 0-10V or -10 -+10V. Current signal 0-20 mA or 4-20 mA.
Binary Reference
A signal applied to the serial communication port (RS 485 term 68 – 69).
Preset Reference
A defined preset reference to be set from -100% to +100% of the reference range. Selection of eight preset references via the digital terminals.
Pulse Reference
A pulse reference applied to term 29 or 33, selected by par. E-04 or E-06 [32]. Scaling in par. group E-6#.
Ref
MAX
Determines the relationship between the reference input at 100% full scale value (typically 10 V, 20mA) and the resulting reference. The maximum reference value
set in par. F-53 Maximum Reference.
Ref
MIN
Determines the relationship between the reference input at 0% value (typically 0V, 0mA, 4mA) and the resulting reference. The minimum reference value set in
par. F-52 Minimum Reference.
Miscellaneous:
Analog Inputs
The analog inputs are used for controlling various functions of the frequency converter.
There are two types of analog inputs:
Current input, 0-20 mA and 4-20 mA
Voltage input, 0-10 V DC
Voltage input, -10 - +10 V DC.
Analog Outputs
The analog outputs can supply a signal of 0-20 mA, 4-20 mA.
Auto Tuning
The Auto Tune algorithm determines the electrical parameters for the connected motor at standstill.
Brake Resistor
The brake resistor is a module capable of absorbing the brake power generated in regenerative braking. This regenerative braking power increases the intermediate
circuit voltage and a brake chopper ensures that the power is transmitted to the brake resistor.
CT Characteristics
Constant torque characteristics used for all applications such as conveyor belts, displacement pumps and cranes.
Digital Inputs
The digital inputs can be used for controlling various functions of the frequency converter.
Digital Outputs
The frequency converter features two Solid State outputs that can supply a 24 V DC (max. 40 mA) signal.
DSP
Digital Signal Processor.
Electronic Thermal Overload
The Electronic Overload is a thermal load calculation based on present load and time. Its purpose is to estimate the motor temperature.
®
Hiperface
Hiperface® is a registered trademark by Stegmann.
Intermittent Duty Cycle
An intermittent duty rating refers to a sequence of duty cycles. Each cycle consists of an on-load and an off-load period. The operation can be either periodic duty
or non-periodic duty.
8
AF-650 GP Design Guide
Keypad
The Keypad makes up a complete interface for control and programming of the frequency converter. The Keypad is detachable and can be installed up to 10ft/
3M from the frequency converter, i.e. in a front panel with the optional Remote Keypad Mounting Kit (RMKYPDAC)..
Logic Controller (LC)
The LC is a sequence of user defined actions executed when the associated user defined events are evaluated as true by the Logic Controller. (Parameter group
LC-##).
lsb
Least significant bit.
msb
Most significant bit.
MCM
Short for Mille Circular Mil, an American measuring unit for cable cross-section. 1 MCM = 0.5067 mm
On-line/Off-line Parameters
Changes to on-line parameters are activated immediately after the data value is changed. Changes to off-line parameters are not activated until you enter [OK]
on the Keypad.
Process PID
The PID regulator maintains the desired speed, pressure, temperature, etc. by adjusting the output frequency to match the varying load.
PCD
Process Data
Pulse Input/Incremental Encoder
An external digital sensor used for feedback information of motor speed and direction. Encoders are used for high speed accuracy feedback and in high dynamic
applications. The encoder connection is either via term 32 and 32 or encoder option OPCENC.
RCD
Residual Current Device.
Set-up
You can save parameter settings in four Set-ups. Change between the four parameter Set-ups and edit one Set-up, while another Set-up is active.
SFAVM
Switching pattern called
Slip Compensation
The frequency converter compensates for the motor slip by giving the frequency a supplement that follows the measured motor load keeping the motor speed
almost constant..
STW
Status Word
Drive Standard Bus
Includes RS 485 bus with Drive protocol or MC protocol. See par. O-30 Protocol.
Thermistor:
A temperature-dependent resistor placed where the temperature is to be monitored (frequency converter or motor).
THD
Total Harmonic Distortion state the total contribution of harmonic.
Trip
A state entered in fault situations, e.g. if the frequency converter is subject to an over-temperature or when the frequency converter is protecting the motor,
process or mechanism. Restart is prevented until the cause of the fault has disappeared and the trip state is cancelled by activating reset or, in some cases, by
being programmed to reset automatically. Trip may not be used for personal safety.
Trip Locked
A state entered in fault situations when the frequency converter is protecting itself and requiring physical intervention, e.g. if the frequency converter is subject
to a short circuit on the output. A locked trip can only be cancelled by cu tting off mains, removing the cause of the fault, and reconnecting th e frequency converter.
Restart is prevented until the trip state is cancelled by activating reset or, in some cases, by being programmed to reset automatically. Trip may not be used for
personal safety.
Stator Flux oriented Asynchronous Vector Modulation (par. F-37 Adv. Switching Pattern).
2
.
1
9
VT Characteristics
Variable torque characteristics used for pumps and fans.
60° AVM
1
Switching pattern called 60°
Asynchronous Vector Modulation (par. F-37 Adv. Switching Pattern).
AF-650 GP Design Guide
Power Factor
The power factor is the relation between I
The power factor for 3-phase control:
The power factor indicates to which extent the frequency converter imposes
a load on the mains supply.
The lower the power factor, the higher the I
In addition, a high power factor indicates that the different harmonic currents are low.
All frequency converters have built-in DC link reactor in the DC link to have a high power factor and to reduce the THD on the main supply.
and I
.
1
RMS
for the same kW performance.
RMS
Power factor
I1 x cos
=
I
RMS
I
=
RMS
I
ϕ1
2
1
=
=
+
3 x U x
3 x U x
I
RMS
2
I
+
5
I
1
2
I
7
I
cos
1
I
RMS
since cos
+ .. +
ϕ
ϕ1 = 1
2
I
n
10
2 Safety and Conformity
2.1 Safety Precautions
AF-650 GP Design Guide
2.1.1 Safety Precautions
The voltage of the drive is dangerous whenever connected to mains. Incorrect installation of the motor, drive or network may cause damage
to the equipment, serious personal injury or death. Consequently, the instructions in this manual, as well as national and local rules and safety
regulations, must be complied with.
Safety Regulations
1. The mains supply to the drive must be disconnected whenever repair work is to be carried out. Check that the mains supply has been disconnected and
that the necessary time has elapsed before removing motor and mains supply plugs.
2. The [OFF] button on the Keypad of the driver does not disconnect the mains supply and consequently it must not be used as a safety switch.
3. The equipment must be properly earthed, the user must be protected against supply voltage and the motor must be protected against overload in
accordance with applicable national and local regulations.
4. The earth leakage current exceeds 3.5 mA.
5. Protection against motor overload is not included in the factory setting. If this function is desired, set par. F-10 Electronic Overload to data value Elec.
OL trip 1 [4] or data value Elec. OL warning 1 [3].
6. Do not remove the plugs for the motor and mains supply while the drive is connected to mains. Check that the mains supply has been disconnected
and that the necessary time has elapsed before removing motor and mains plugs.
7. Please note that the drive has more voltage sources than L1, L2 and L3, when load sharing (linking of DC intermediate circuit) or external 24 V DC are
installed. Check that all voltage sources have been disconnected and that the necessary time has elapsed before commencing repair work.
Warning against unintended start
1. The motor can be brought to a stop by means of digital commands, bus commands, references or a local stop, while the drive is connected to mains. If
personal safety considerations (e.g. risk of personal injury caused by contact with moving machine parts following an unintentional start) make it
necessary to ensure that no unintended start occurs, these stop functions are not sufficient. In such cases the mains supply must be disconnected.
2. The motor may start while setting the parameters. If this means that personal safety may be compromised (e.g. personal injury caused by contact with
moving machine parts), motor starting must be prevented by disconnection of the motor connection.
3. A motor that has been stopped with the mains supply connected, may start if faults occur in the electronics of the drive, through temporary overload
or if a fault in the power supply grid or motor connection is remedied. If unintended start must be prevented for personal safety reasons (e.g. risk of
injury caused by contact with moving machine parts), the normal stop functions of the drive are not sufficient. In such cases the mains supply must be
disconnected.
4. Control signals from, or internally within, the drive may in rare cases be activated in error, be delayed or fail to occur entirely. When used in situations
where safety is critical, e.g. when controlling the electromagnetic brake function of a hoist application, these control signals must not be relied on
exclusively.
2
Touching the electrical parts may be fatal - even after the equipment has been disconnected from mains.
Also make sure that other voltage inputs have been disconnected, such as external 24 V DC, load sharing (linkage of DC intermediate circuit), as well as the motor
connection for kinetic back up.
Systems where frequency converters are installed must, if necessary, be equipped with additional monitoring and protective devices according to the valid safety
regulations, e.g law on mechanical tools, regulations for the prevention of accidents etc. Modifications on the frequency converters by means of the operating
software are allowed.
Protection Mode
Once a hardware limit on motor current or dc-link voltage is exceeded the drive will enter “Protection mode”. “Protection mode” means a change of the PWM
modulation strategy and a low switching frequency to minimize losses. This continues 10 sec after the last fault and increases the reliability and the robustness
of the drive while re-establishing full control of the motor.
11

AF-650 GP Design Guide
The “Protection mode” can be disabled by setting par. SP-26 Trip Delay at Drive Fault to ze ro w hich mea ns that the drive will trip immediately if one of the hardware
limits is exceeded.
The DC link capacitors remain charged after power has been disconnected. To avoid electrical shock hazard, disconnect the frequency con-
verter from mains before carrying out maintenance. When using a PM-motor, make sure it is disconnected. Before doing service on the
frequency converter wait at least the amount of time indicated below:
2
Voltage Power Waiting Time
380 - 480 V 0.25 - 7.5 kW 4 minutes
11 - 75 kW 15 minutes
90 - 200 kW 20 minutes
250 - 800 kW 40 minutes
525 - 690 V 11-75 kW (unit size 2x and 3x) 15 minutes
37 - 315 kW (unit size 4x) 20 minutes
355 - 1000 kW 30 minutes
2.2.1 Disposal Instruction
Equipment containing electrical components may not be disposed of together with domestic waste.
It must be separately collected with electrical and electronic waste according to local and currently
valid legislation.
AF-650 GP
Design Guide
Software version: 1.xx
This Design Guide can be used for all AF-650 GP frequency converters with software version 1.xx.
The software version number can be seen from par. ID-43 Software Version.
2.4.1 CE Conformity and Labelling
What is CE Conformity and Labelling?
The purpose of CE labelling is to avoid technical trade obstacles within EFTA and the EU. The EU has introduced the CE label as a simple way of showing whether
a product complies with the relevant EU directives. The CE label says nothing about the specifications or quality of the product. Frequency converters are regulated
by three EU directives:
The machinery directive (98/37/EEC)
All machines with critical moving parts are covered by the machinery directive of January 1, 1995. Since a frequency converter is largely electrical, it does not fall
under the machinery directive. However, if a frequency converter is supplied for use in a machine, we provide information on safety aspects relating to the
frequency converter. We do this by means of a manufacturer's declaration.
The low-voltage directive (73/23/EEC)
Frequency converters must be CE labelled in accordance with the low-voltage directive of January 1, 1997. The directive applies to all electrical equipment and
appliances used in the 50 - 1000 V AC and the 75 - 1500 V DC voltage ranges. GE CE-labels in accordance with the directive and issues a declaration of conformity
upon request.
The EMC directive (89/336/EEC)
EMC is short for electromagnetic compatibility. The p resence of electromagnetic compatibility means that the mutual interference between different components/
appliances does not affect the way the appliances work.
The EMC directive came into effect January 1, 1996. GE CE-labels in accordance with the directive and issues a declaration of conformity upon request. To carry
out EMC-correct installation, see the instructions in this Design Guide. In addition, we specify which standards our products comply with. We offer the filters
presented in the specifications and provide other types of assistance to ensure the optimum EMC result.
12

AF-650 GP Design Guide
The frequency converter is most often used by professionals of the trade as a complex component forming part of a larger appliance, system or installation. It
must be noted that the responsibility for the final EMC properties of the appliance, system or installation rests with the installer.
2.4.2 What Is Covered
The EU "Guidelines on the Application of Council Directive 89/336/EEC" outline three typical situations of using a frequency converter. See below for EMC coverage
and CE labelling.
1. The frequency converter is sold directly to the end-consumer. The frequency converter is for example sold to a DIY market. The end-consumer is a
layman. He installs the frequency converter himself for use with a hobby machine, a kitchen appliance, etc. For such applications, the frequency converter
must be CE labelled in accordance with the EMC directive.
2. The frequency converter is sold for installation in a plant. The plant is built up by professionals of the trade. It could be a production plant or a heating/
ventilation plant designed and installed by professionals of the trade. Neither the frequency converter nor the finished plant has to be CE labell ed und er
the EMC directive. However, the unit must comply with the basic EMC requirements of the directive. This is ensured by using components, appliances,
and systems that are CE labelled under the EMC directive.
3. The frequency converter is sold as part of a complete system. The system is being marketed as complete and could e.g. be an air-conditioning system.
The complete system must be CE labelled in accordance with the EMC directive. The manufacturer can ensure CE labelling under the EMC directive either
by using CE labelled components or by testing the EMC of the system. If he chooses to use only CE labelled components, he does not have to test the
entire system.
2
2.4.3 GE Frequency Converter and CE Labelling
CE labelling is a positive feature when used for its original purpose, i.e. to facilitate trade within the EU and EFTA.
However, CE labelling may cover many different specifications. Thus, you have to check what a given CE label specifically covers.
The covered specifications can be very different and a CE label may therefore give the installer a false feeling of security when using a frequency converter as a
component in a system or an appliance.
GE CE labels the frequency conve rters in accordance with the low-voltage directive. This mea ns that if the frequency converter is installed correctly, we guarantee
compliance with the low-voltage directive. GE issuesWe issue a declaration of conformity that confirms our CE labelling in accordance with the low-voltage
directive.
The CE label also applies to the EMC directive provided that the instructions for EMC-correct installation and filtering are followed. On this basis, a declaration of
conformity in accordance with the EMC directive is issued.
The Design Guide offers detailed instructions for installation to ensure EMC-correct installation. Furthermore, GE specifies which our different products comply
with.
GE provides other types of assistance that can help you obtain the best EMC result.
2.4.4 Compliance with EMC Directive 89/336/EEC
As mentioned, the frequency converter is mostly used by professionals of the trade as a complex component forming part of a larger appliance, system, or
installation. It must be noted that the responsibility for the final EMC properties of the appliance, system or installation rests with the installer. As an aid to the
installer, GE has prepared EMC installation guidelines for the Power Drive system. The standards and test levels stated for Power Drive systems are complied with,
provided that the EMC-correct instructions for installation are followed, see the section EMC Immunity.
The frequency converter has been designed to meet the IEC/EN 60068-2-3 standard, EN 50178 pkt. 9.4.2.2 at 50°C.
13
AF-650 GP Design Guide
2.5.1 Aggressive Environments
A frequency converter contains a large number of mechanical and electronic components. All are to some extent vulnerable to environmental effects.
2
Liquids can be carried through the air and condense in the frequency converter and may cause corrosion of components and metal parts. Steam, oil, and salt
water may cause corrosion of components and metal parts. In such environments, use equipment with Unit Size rating IP 54/55. As an extra protection, coated
printed circuit boards can be ordered as an option.
Airborne
particles is dust particles around the frequency converter fan. In very dusty environments, use equipment with Unit Size rating IP 54/55 or a cabinet for IP 00/IP
20/TYPE 1 equipment.
In environments with high temperatures and humidity,
frequency converter components.
Such chemical reactions will rapidly affect and damage the electronic components. In such environments, mount the equipment in a cabinet with fresh air
ventilation, keeping aggressive gases away from the frequency converter.
An extra protection in such areas is a coating of the printed circuit boards, which can be ordered as an option.
NB!
Mounting frequency converters in aggressive environments increases the risk of stoppages and considerably reduces the life of the converter.
The frequency converter should not be installed in environments with airborne liquids, particles, or gases capable of affecting and damaging
the electronic components. Failure to take the necessary protective measures increases the risk of stoppages, thus reducing the life of the
frequency converter.
Particles such as dust may cause mechanical, electrical, or thermal failure in the frequency converter. A typical indicator of excessive levels of airborne
corrosive gases such as sulphur, nitrogen, and chlorine compounds will cause chemical processes on the
Before installing the frequency converter, check the ambient air for liquids, particles, and gases. This is done by observing existing installations in this environment.
Typical indicators of harmful airborne liquids are water or oil on metal parts, or corrosion of metal parts.
Excessive dust particle levels are often found on installation cabinets and existing electrical installations. One indicator of aggressive airborne gases is blackening
of copper rails and cable ends on existing installations.
Unit Sizes 4x and 5x have a stainless steel back-channel option to provide additional protection in aggressive environments. Proper ventilation is still required for
the internal components of the drive. Contact GE for additional information.
The frequency converter has been tested according to the procedure based on the shown standards:
The frequency converter complies with requirements that exist for units mounted on the walls and floors of production premises, as well as in panels bolted to
walls or floors.
IEC/EN 60068-2-6: Vibration (sinusoidal) - 1970
IEC/EN 60068-2-64: Vibration, broad-band random
NB!
Unit Sizes 4x and 5x have a stainless steel backchannel option to provide additional protection in aggressive environments. Proper ventilation is still required
for the internal components of the drive. Contact factory for additional information.
14

3 Introduction to AF-650 GP
3.1 Product Overview
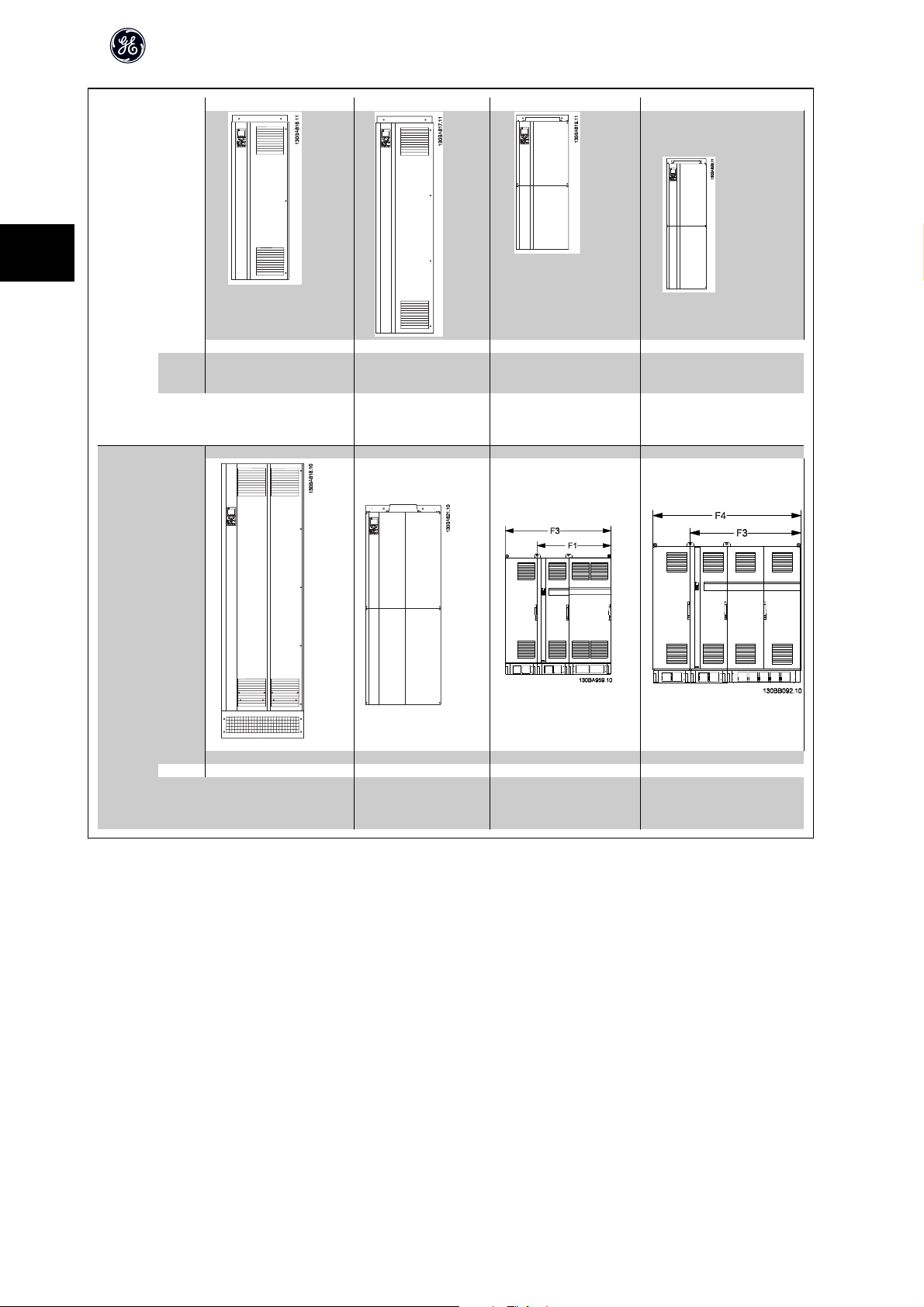
Frame size depends on Unit Size, power range and mains voltage
Unit Size 12 13 15
130BA810.10
AF-650 GP Design Guide
3
Unit Size
protection
Heavy duty (HD) rated power - 160%
overload torque
Unit Size
Unit Size
protection
Heavy duty (HD) rated power - 160%
overload torque
Unit Size
IP 20/21 20/21 55/66
NEMA Chassis/ Type 1 Chassis/ Type 1 Type 12
IP 55/66 55/66 20 20
NEMA Type 1/Type 12 Type 1/Type 12 Chassis Chassis
0.25-3 kW (200–240 V)
0.37-4.0 kW (380-480V)
21
5.5-7.5 kW (200-240 V)
11-15 kW (380-480V)
11-15 kW (525-600 V)
31 32 33 34
0.75-4 kW (525-600 V)
22 23 24
11 kW (200-250 V)
18.5-22 kW (380-480V)
18.5-22 kW (525-600 V)
11-22 kW (525-690 V)
3.7 kW (200-240 V)
5.5-7.5 kW (380-480 V)
5.5-7.5 kW (525-600 V )
5.5-7.5 kW (200-240 V)
11-15 kW (380-480 V)
11-15 kW (525-600 V)
0.25-3.7 kW (200-240 V)
0.37-7.5 kW (380-480 V)
0.75 -7.5 kW (525-600 V)
11-15 kW (200-240 V)
18.5-30 kW (380-480 V)
18.5-30 kW (525-600 V)
Unit Size
protection
Heavy duty (HD) rated power - 160%
overload torque
IP 55/66 55/66 20 20
NEMA Type 1/Type 12 Type 1/Type 12 Chassis Chassis
15-22 kW (200-240 V)
30-45kW (380-480V)
30-45 kW (525-600 V)
30-37 kW (200-240 V)
55-75 kW (380-480V)
55-90 kW (525-600 V)
30-75 kW (525-690 V)
18.5-22 kW (200-240 V)
37-45 kW (380-480 V)
37-45 kW (525-600 V)
30-37 kW (200-240 V)
55-75 kW (380-480 V)
55-90 kW (525-600 V)
15
3
AF-650 GP Design Guide
Unit Size 41 42 43 44
Unit Size
protection
Heavy duty (HD) rated
power - 160% overload torque
Unit Size 51 52 61/63 62/64
Unit Size
protection
Heavy duty (HD) rated
power - 160% overload torque
IP 21/54 21/54 00 00
NEMA Type 1/ Type 12 Type 1/ Type 12 Chassis Chassis
90-110 kW at 400 V
(380-480 V)
37-132 kW at 690 V
(525-690 V)
IP 21/54 00 21/54 21/54
NEMA Type 1/ Type 12 Chassis Type 1/ Type 12 Type 1/ Type 12
250-400 kW at 400 V
(380-480 V)
355-560 kW at 690 V
(525-690 V)
132-200 kW at 400 V
(380-480 V)
160-315 kW at 690 V
(525-690 V)
250-400 kW at 400 V
(380-480 V)
355-560 kW at 690 V
(525-690 V)
90-110 kW at 400 V
(380-480 V)
37-132 kW at 690 V
(525-690 V)
450 - 630 kW at 400 V
(380 - 480 V)
630 - 800 kW at 690 V
(525-690 V)
132-200 kW at 400 V
(380-480 V)
160-315 kW at 690 V
(525-690 V)
710 - 800 kW at 400 V
(380 - 480 V)
900 - 1000 kW at 690 V
(525-690 V)
16
AF-650 GP Design Guide
3.2.1 Control Principle
A frequency converter rectifies AC voltage from mains into DC voltage, after which this DC voltage is converted into a AC current with a variable amplitude and
frequency.
The motor is supplied with variable voltage / current and frequency, which enables infinitely variable speed control of three-phased, standard AC motors and
permanent magnet synchronous motors.
3.2.2 AF-650 GP Controls
The frequency converter is capable of controlling either the speed or the torque on the motor shaft. Setting par. H-40 Configuration Mode determines the type of
control.
Speed control:
There are two types of speed control:
• Speed open loop control which does not require any feedback from motor (sensorless).
• Speed closed loop PID control requires a speed feedback to an input. A properly optimised speed closed loop control will have higher accuracy than a
speed open loop control.
Selects which input to use as speed PID feedback in par. PI-00 Speed PID Feedback Source.
3
Torque control:
The torque control function is used in applications where the torque on motor output shaft is controlling the application as tension control. Torque control can
be selected in par. H-40, either in Advanced Vector Control open loop [4] or Flux control closed loop with motor speed feedback [2]. Torque setting is done by
setting an analog, digital or bus controlled reference. When running torque control it is recommended to make a full Auto tune procedure as the correct motor
data are of high importance for optimal performance.
• Closed loop in Flux mode with encoder feedback offers superior performance in all four quadrants and at all motor speeds.
• Open loop in Advanced Vector Control mode. The function is used in mechanical robust applications, but the accuracy is limited. Open loop torque
function works basically only in one speed direction. The torque is calculated on basic of current measurement internal in the frequency converter. See
Application Example Torque open Loop
Speed / torque reference:
The reference to these controls can either be a single refrence or be the sum of various references including relatively scaled references. The handling of refe rences
is explained in detail later in this section.
17
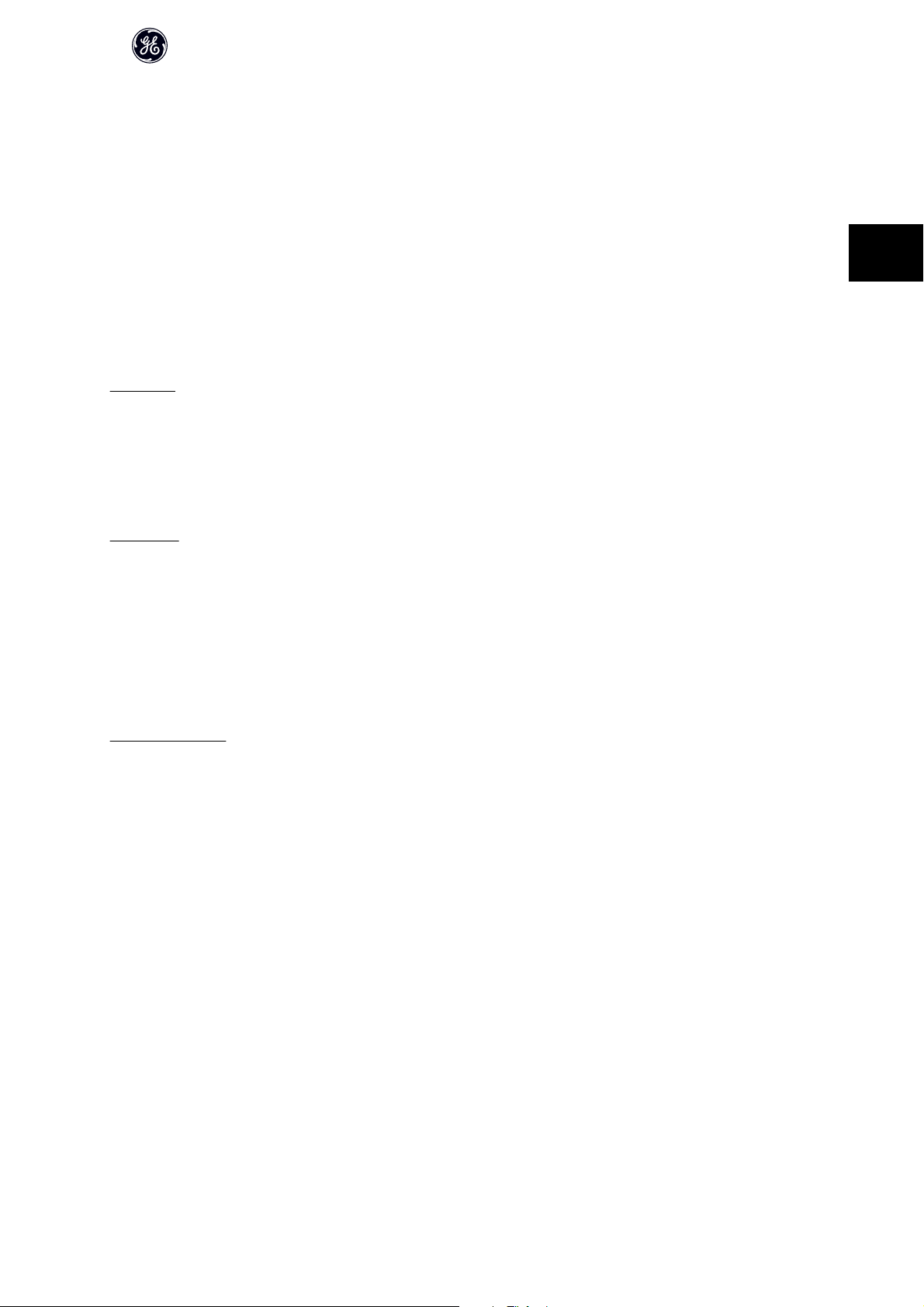
3.2.3 Control Structure in Advanced Vector Control
Control structure in Advanced Vector Control open loop and closed loop configurations:
3
AF-650 GP Design Guide
In the configuration shown in the illustration above, par. H-41 Motor Control Principle is set to “Advanced Vector Control [1]” and par. H-40 Configuration Mode is
set to “Speed open loop [0]”. The resulting reference from the reference handling system is received and fed through the ramp limitation and speed limitation
before being sent to the motor control. The output of the motor control is then limited by the maximum frequency limit.
If par. H-40 Configuration Mode is set to “Speed closed loop [1]” the resulting reference will be passed from the ramp limitation and speed limitation into a speed
PID control. The Speed PID control parameters are located in the par. group PI-0#. The resulting reference from the Speed PID control is sent to the motor control
limited by the frequency limit.
Select “Process [3]” in par. H-40 Configuration Mode to use the process PID control for closed loop control of e.g. speed or pressure in the controlled application.
The Process PID parameters are located in par. group PI-2# and PI-3#.
18
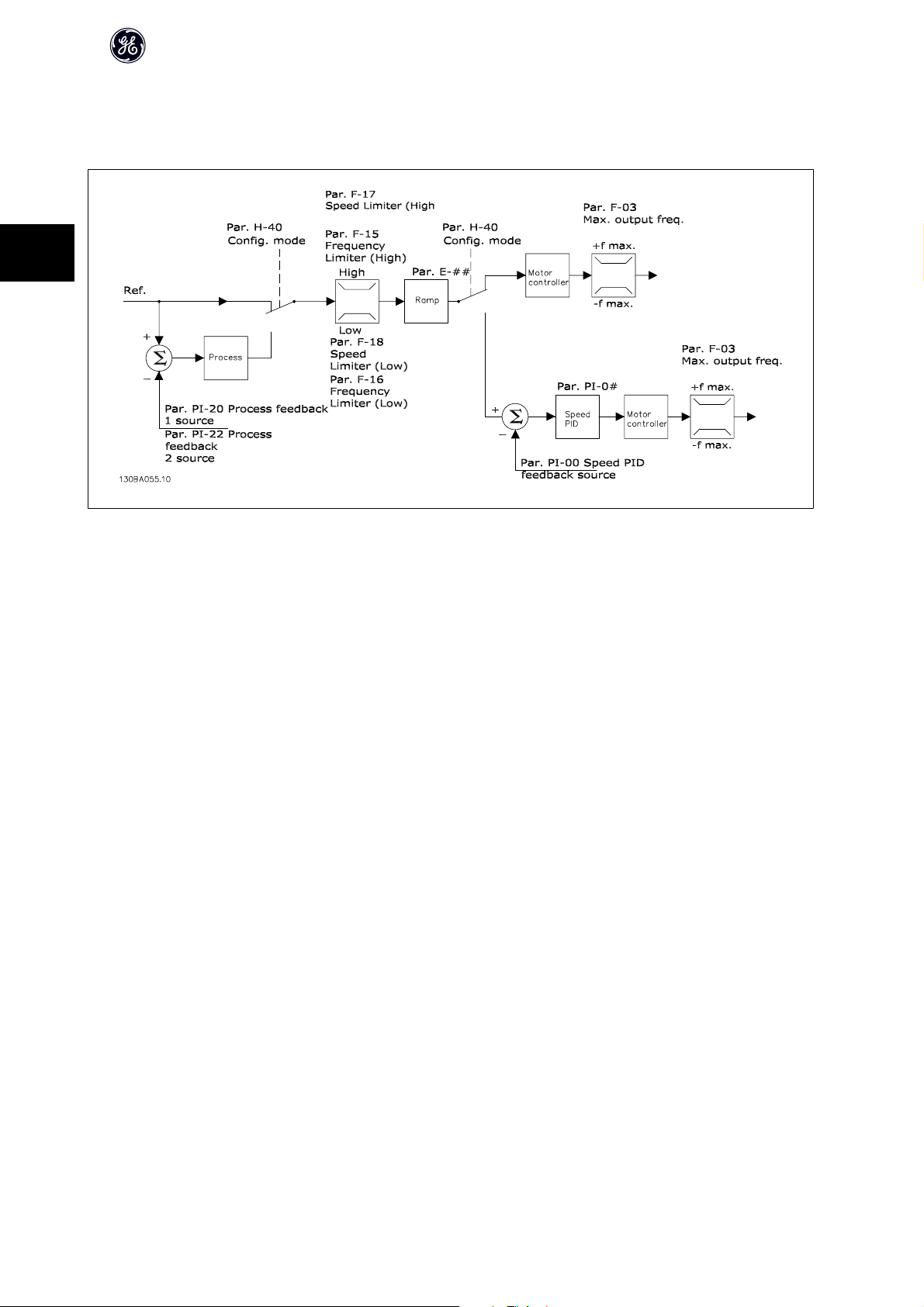
3.2.4 Control Structure in Flux Sensorless
Control structure in Flux sensorless open loop and closed loop configurations.
AF-650 GP Design Guide
3
In the shown configuration, par. H-41 Motor Control Principle is set to “Flux sensorless [2]” and par. H-40 Configuration Mode is set to “Speed open loop [0]”. The
resulting reference from the reference handling system is fed through the ramp and speed limitations as determined by the parameter settings indicated.
An estimated speed feedback is generated to the Speed PID to control the output frequency.
The Speed PID must be set with its P,I, and D parameters (par. group PI-0#).
Select “Process [3]” in par. H-40 Configuration Mode to use the process PID control for closed loop control of i.e. speed or pressure in the controlled application.
The Process PID parameters are found in par. group PI-2# and PI-3#.
19
AF-650 GP Design Guide
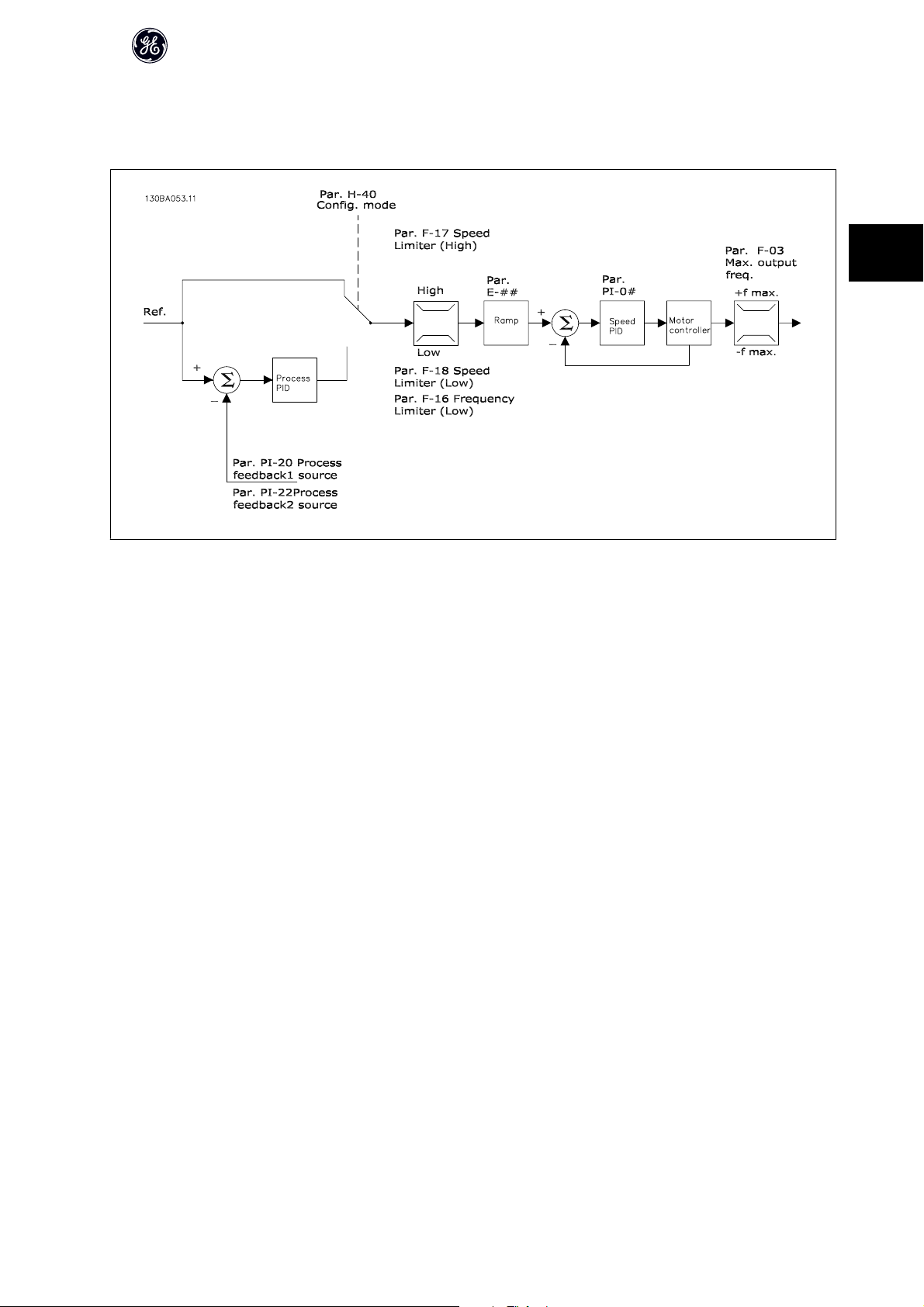
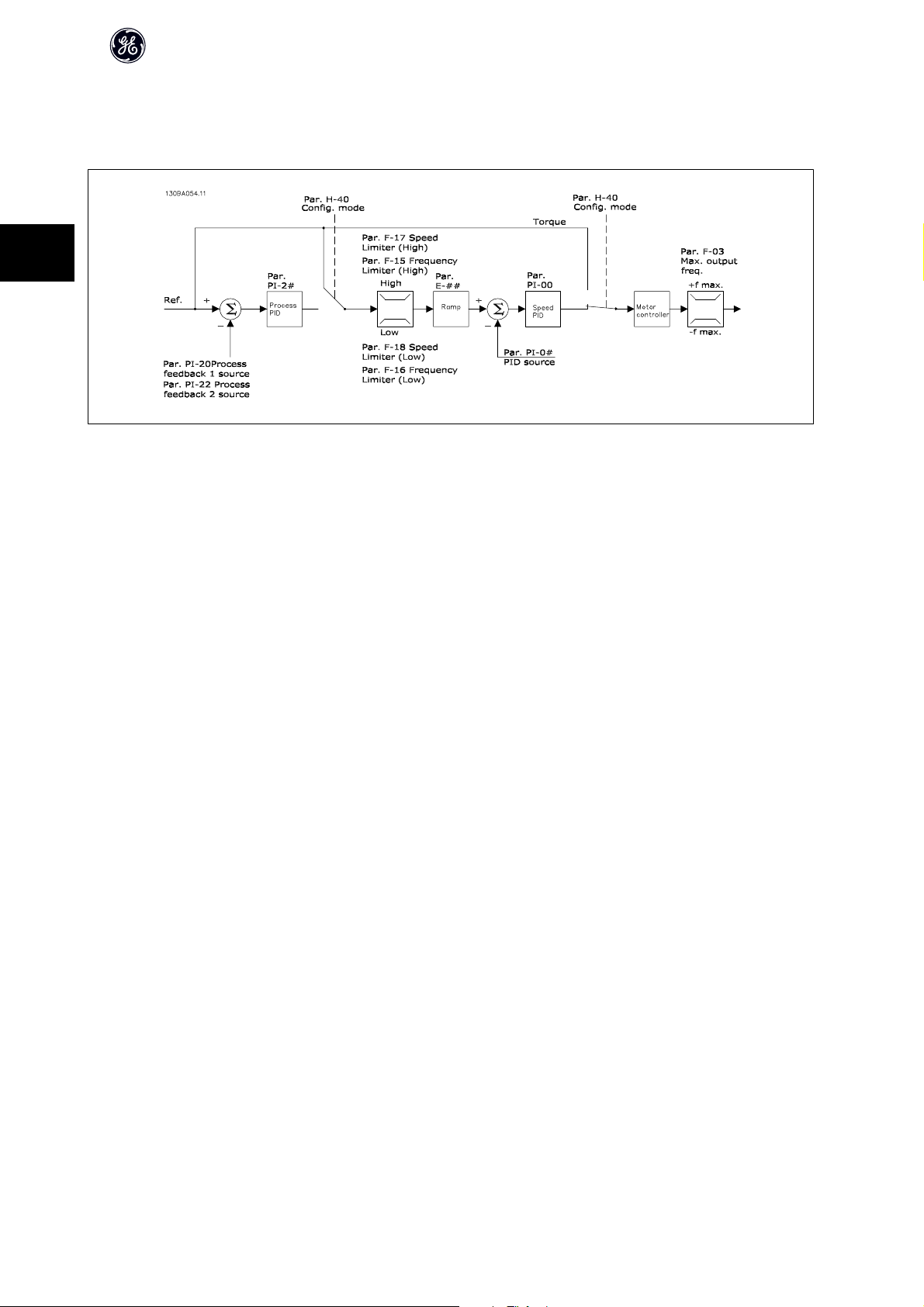
3.2.5 Control Structure in Flux with Motor Feedback
Control structure in Flux with motor feedback configuration (only available in AF-650 GP):
3
In the shown configuration, par. H-41 Motor Control Principle is set to “Flux w motor feedb [3]” and par. H-40 Configuration Mode is set to “Speed closed loop [1]”.
The motor control in this configuration relies on a feedback signal from an encoder mounted directly on the motor (set in par. H-42 Flux Motor Feedback
Source).
Select “Speed closed loop [1]” in par. H-40 Configuration Mode to use the resulting reference as an input for the Speed PID control. The Speed PID control parameters
are located in par. group PI-0#.
Select “Torque [2]” in par. H-40 Configuration Mode to use the resulting reference directly as a torque reference. Torque control can only be selected in the Flux
with motor feedback (par. H-41 Motor Control Principle) configuration. When this mode has been selected, the reference will use the Nm unit. It requires no torque
feedback, since the actual torque is calculated on the basis of the current measurement of the frequency converter.
Select “Process [3]” in par. H-40 Configuration Mode to use the process PID control for closed loop control of e.g. speed or a process variable in the controlled
application.
3.2.6 Internal Current Control in Advanced Vector Control Mode
The frequency converter features an integral current limit control which is activated when the motor current, and thus the torque, is higher than the torque limits
set in par. F-40 Torque Limiter (Driving), par. F-41 Torque Limiter (Braking) and par. F-43 Current Limit.
When the frequency converter is at the current limit during motor operation or regenerative operation, the frequency converter will try to get below the preset
torque limits as quickly as possible without losing control of the motor.
20
AF-650 GP Design Guide
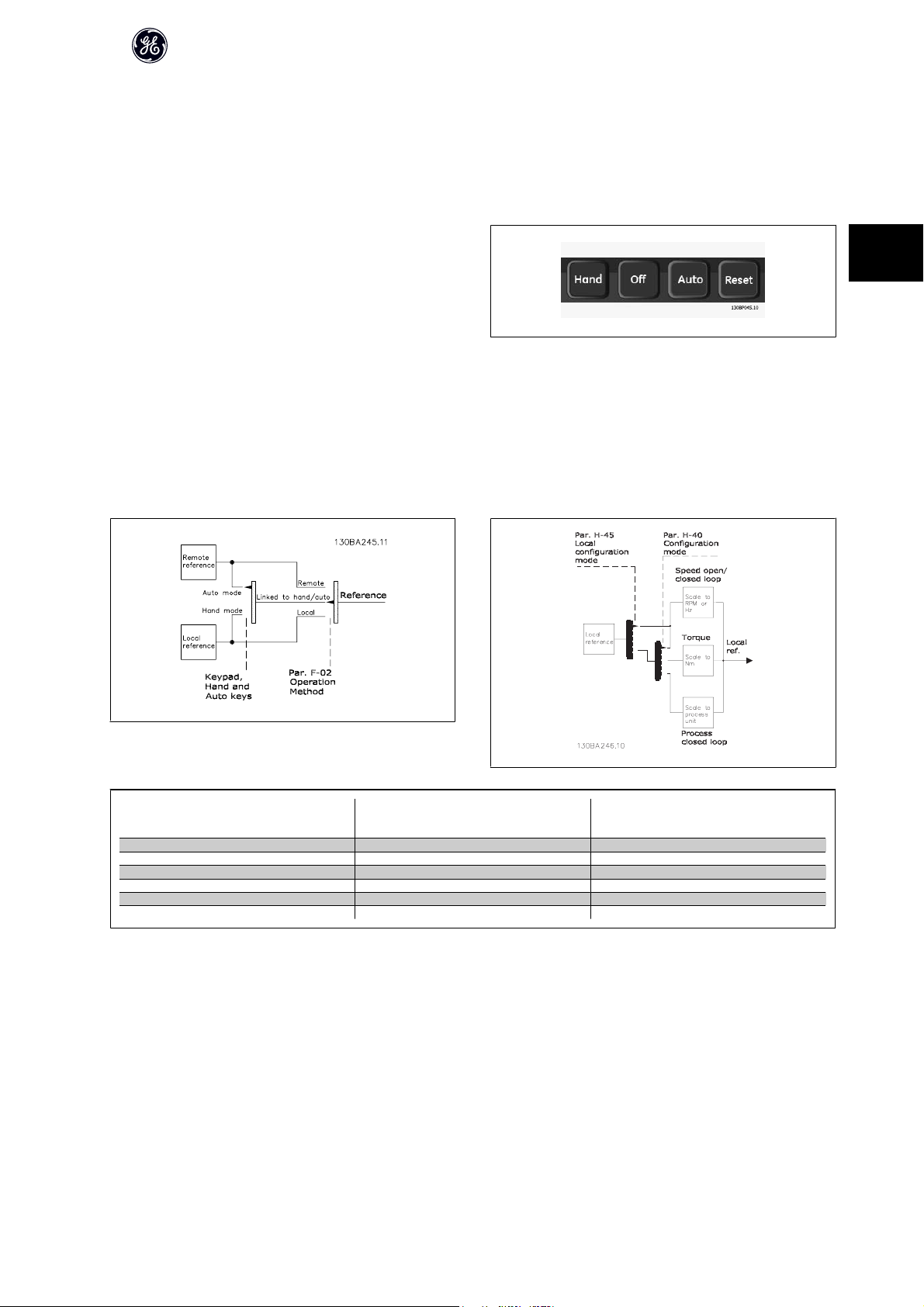
3.2.7 Local (Hand) and Remote (Auto) Control
The frequency converter can be operated manually via the local control panel (Keypad) or remotely via analog and digital inputs and serial bus.
If allowed in par. K-40 [Hand] Button on Keypad, par. K-41 [Off] Button on Keypad, par. K-42 [Auto] Button on Keypad, and par. K-43 [Reset] Button on Keypad, it is
possible to start and stop the frequency converter via the Keypad using the [Hand] and [Off] keys. Alarms can be reset via the [RESET] key. After pressing the
[Hand] key, the frequency converter goes into Hand mode and follows (as default) the Local reference that can be set using arrow key on the Keypad.
After pressing the [Auto] key, the frequency converter goes into Auto mode
and follows (as default) the Remote reference. In this mode, it is possible to
control the frequency converter via the digital inputs and various serial in-
terfaces (RS-485, USB, or an optional network). See more about starting,
stopping, changing ramps and parameter set-ups etc. in par. group E-0#
(digital inputs) or par. group O-5# (serial communication).
Active Reference and Configuration Mode
The active reference can be either the local reference or the remote reference.
In par. F-02 Operation Method the local reference can be permanently selected by selecting Local [2].
To permanently select the remote reference select Remote [1]. By selecting Linked to Hand/Auto [0] (d efault) the reference site will depend on which mode i s active.
(Hand Mode or Auto Mode).
3
Hand
Auto
Keypad Keys
Hand Linked to Hand / Auto Local
Hand -> Off Linked to Hand / Auto Local
Auto Linked to Hand / Auto Remote
Auto -> Off Linked to Hand / Auto Remote
All keys Local Local
All keys Remote Remote
The table shows under which conditions either the Local reference or the Remote reference is active. One of them is always active, but both can not be active at
the same time.
Par. H-40 Configuration Mode determines what kind of application control principle (i.e. Speed, Torque or Process Control) is used when the Remote reference is
active (see table above for the conditions).
Par. H-45 Local Mode Configuration determines the kind of application control principle that is used when the Local reference is made active.
Par. F-02 Operation Method Active Reference
21
3.3 Reference Handling
Local Reference
The local reference is active when the drive is operated with ‘Hand On’ bottom active. Adjust the reference by up/down and left/right arrows respectively.
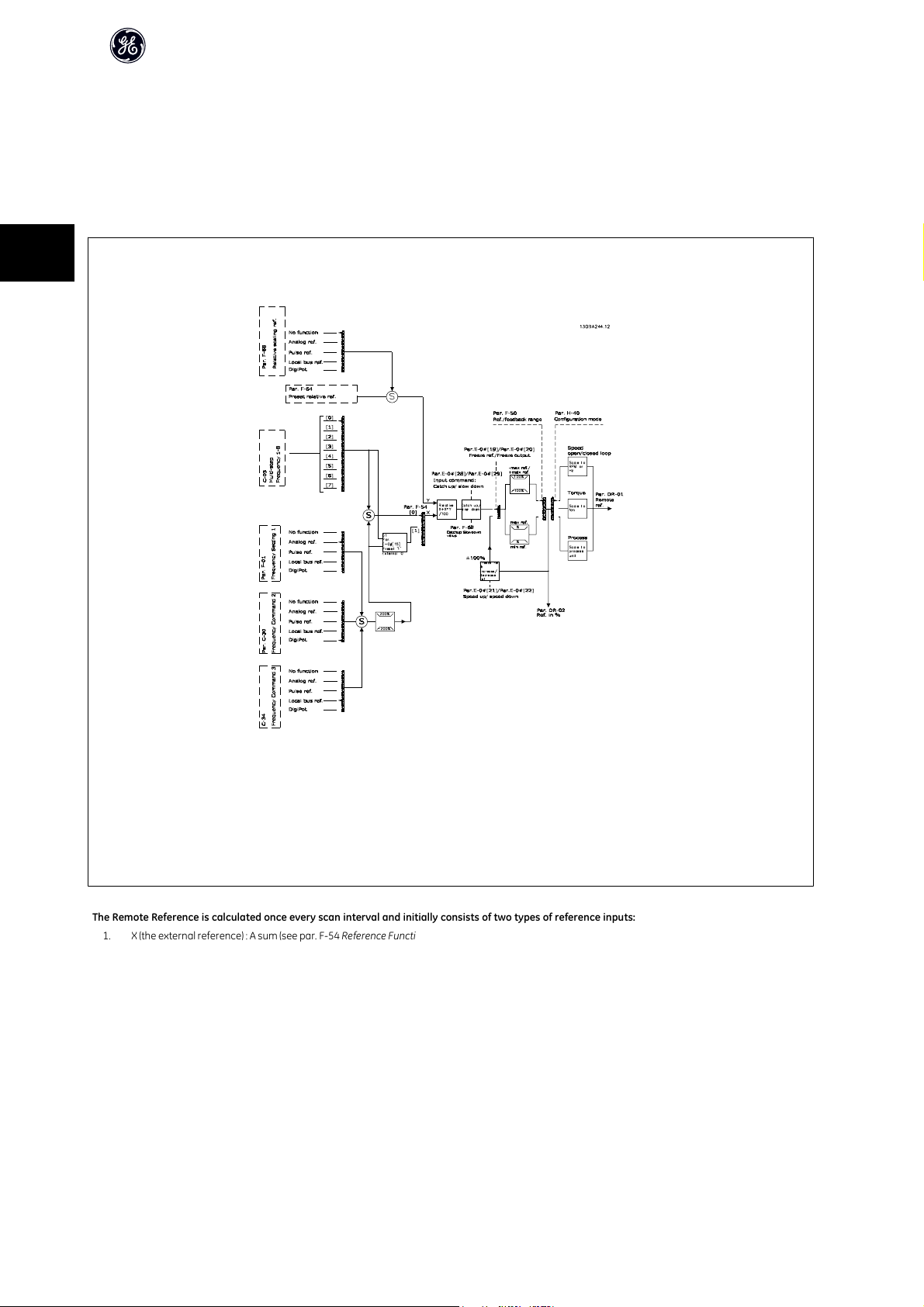
Remote Reference
The reference handling system for calculating the Remote reference is shown in the illustration below.
3
!"
#
$
-
./012
33
.433
%
&'&()
*+$#
,,
AF-650 GP Design Guide
The Remote Reference is calculated once every scan interval and initially consists of two types of reference inputs:
1. X (the external reference) : A sum (see par. F-54 Reference Function) of up to f our externally selected references, comprising any combi nation (determined
by the setting of par. F-01 Frequency Setting 1, par. C-30 Frequency Command 2 and par. C-34 Frequency Command 3) of a fixed preset reference
(par. C-05 Multi-step Frequency 1 - 8 ), variable analog references, variable digital pulse references, and various serial bus references in whatever unit
the frequency converter is controlled ([Hz], [RPM], [Nm] etc.).
2. Y- (the relative reference): A sum of one fixed preset reference (par. F-64 Preset Relative Reference) and one variable analog reference (par. F-68 Relative
Scaling Reference Resource) in [%].
The two types of reference inputs are combined in the following formula: Remote reference = X + X * Y / 100%. If relative reference is not used par. F-68 must be
set to No function and par. F-64 to 0%. The catch up / slow down function and the freeze reference function can both be activated by digital inputs on the
frequency converter. The functions and parameters are described in the Programming Guide, DET-618
The scaling of analog references are described in par. groups AN-1# and AN-2#, and the scaling of digital pulse references are described in par. group E-6#.
Reference limits and ranges are set in par. group F-5#.
22
AF-650 GP Design Guide
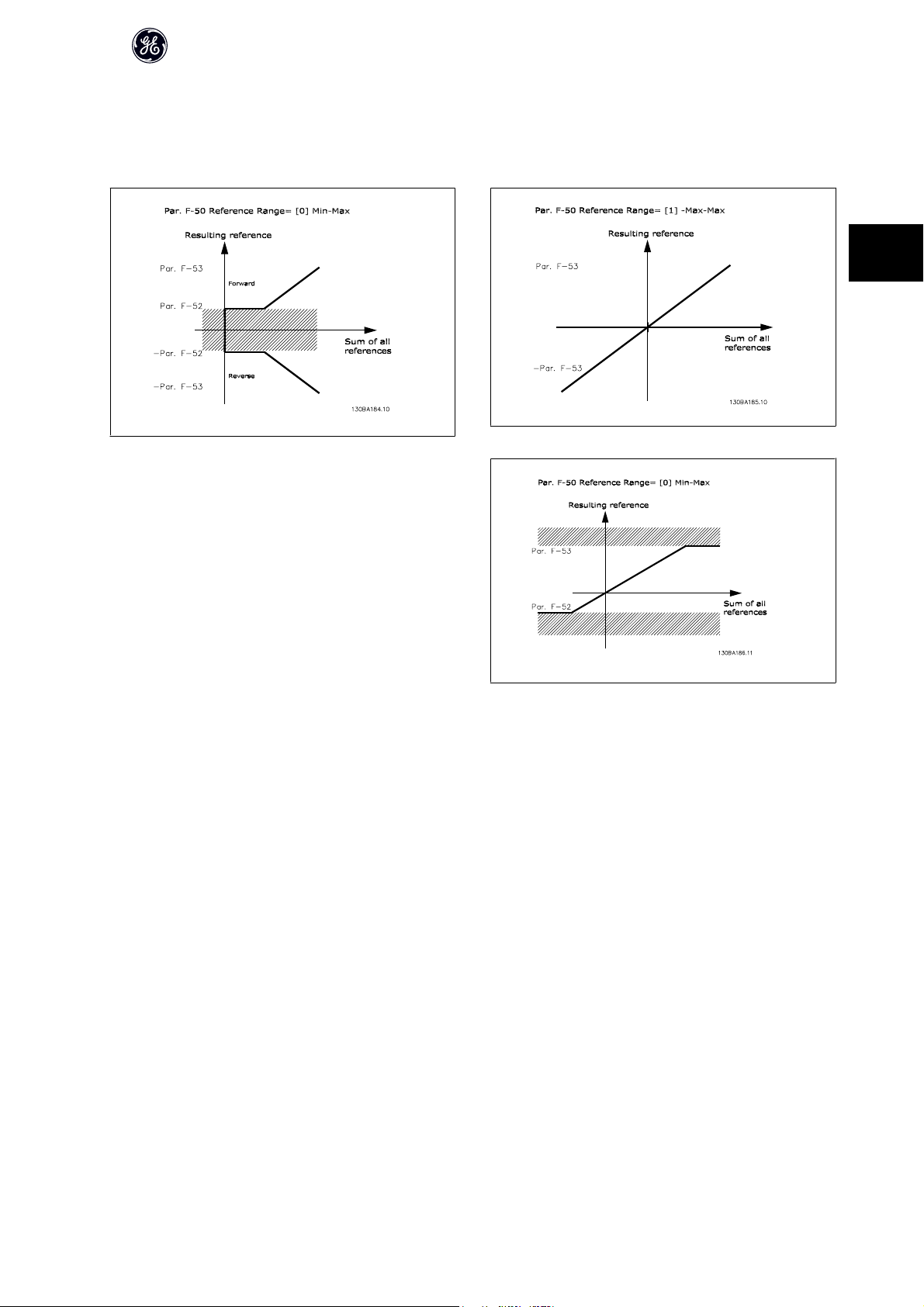
3.3.1 Reference Limits
Par. F-50 Reference Range, par. F-52 Minimum Reference and par. F-53 Maximum Reference together define the allowed range of the sum of all references. The
sum of all references are clamped when necessary. The relation between the resulting reference (after clamping) and the sum of all references is shown below.
The value of par. F-52 Minimum Reference can not be set to less than 0, unless
the par. H-40 Configuration Mode is set to [3] Process. In that case the fol-
lowing relations between the resulting reference (after clamping) and the sum
of all references is as shown to the right.
3
3.3.2 Scaling of Preset References and Bus References
Preset references are scaled according to the following rules:
• When par. F-50 Reference Range : [0] Min - Max 0% reference equals 0 [unit] where unit can be any unit e.g. rpm, m/s, bar etc. 100% reference equals
the Max (abs (par. F-53 Maximum Reference ), abs (par. F-52 Minimum Reference)).
• When par. F-50 Reference Range : [1] -Max - +Max 0% reference equals 0 [unit] -100% reference equals -Max Reference 100% reference equals Max
Reference.
Bus references are scaled according to the following rules:
• When par. F-50 Reference Range: [0] Min - Max. To obtain max resolution on the bus reference the scaling on the bus is: 0% reference equals Min
Reference and 100% reference equals Max reference.
• When par. F-50 Reference Range: [1] -Max - +Max -100% reference equals -Max Reference 100% reference equals Max Reference.
23
AF-650 GP Design Guide
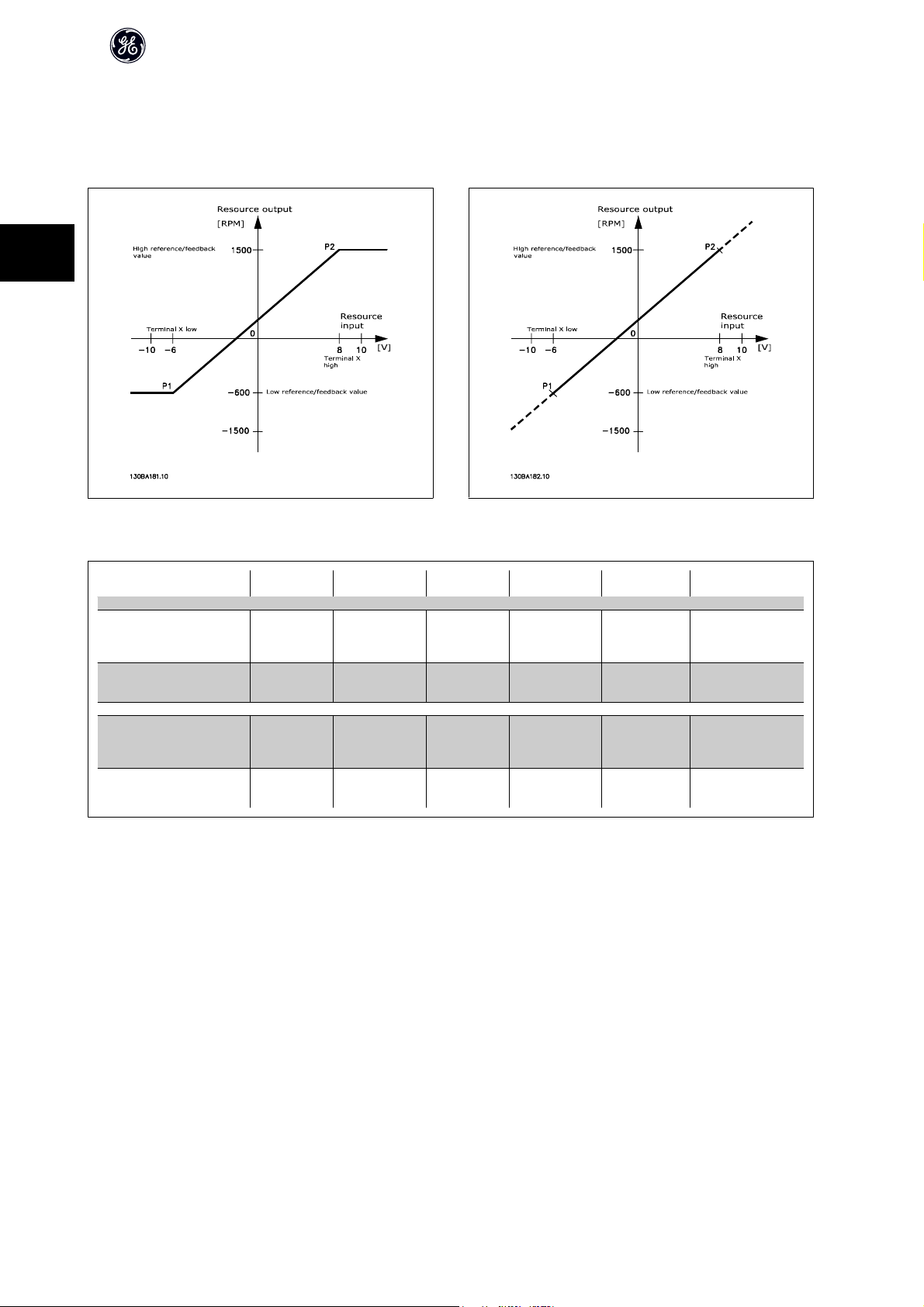
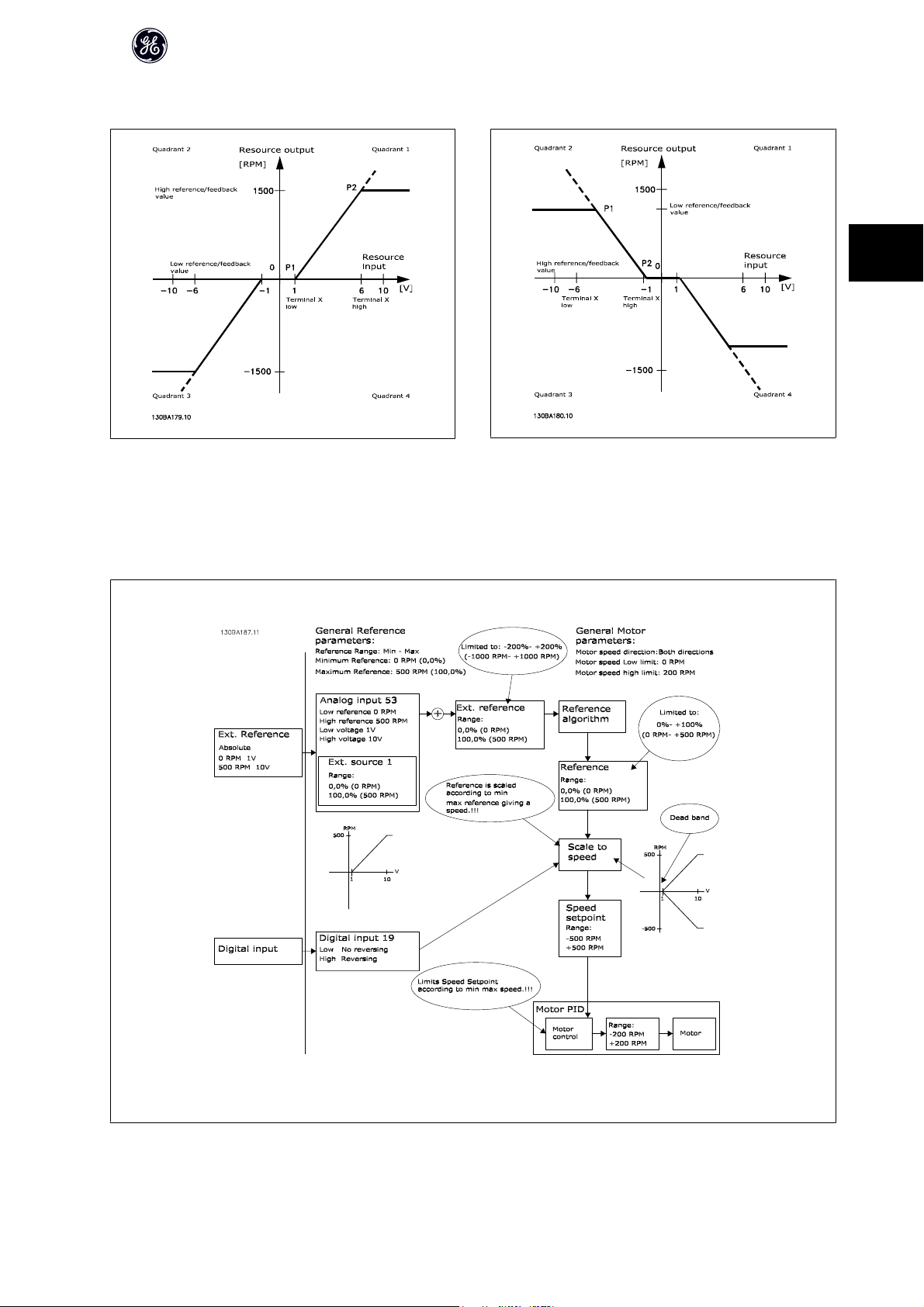
3.3.3 Scaling of Analog and Pulse References and Feedback
References and feedback are scaled from analog and pulse inputs in the same way. The only difference is that a reference above or below the specified minimum
and maximum “endpoints” (P1 and P2 in the graph below) are clamped whereas a feedback above or below is not.
3
The endpoints P1 and P2 are defined by the following parameters depending on which analog or pulse input is used
Analog 53
P1 = (Minimum input value, Minimum reference value)
Minimum reference value
Minimum input value Par. AN-10 Ter-
P2 = (Maximum input value, Maximum reference value)
Maximum reference value Par. AN-15 Ter-
Maximum input value Par. AN-11 Ter-
S201=OFF
Par. AN-14 Ter-
minal 53 Low
Ref./Feedb. Value
minal 53 Low
Voltage [V]
minal 53 High
Ref./Feedb. Value
minal 53 High
Voltage [V]
Analog 53
S201=ON
Par. AN-14 Termi-
nal 53 Low Ref./
Feedb. Value
Par. AN-12 Terminal 53 Low Current
[mA]
Par. AN-15 Termi-
nal 53 High Ref./
Feedb. Value
Par. AN-13 Terminal 53 High Current [mA]
Analog 54
S202=OFF
Par. AN-24 Ter-
minal 54 Low
Ref./Feedb. Value
Par. AN-20 Terminal 54 Low
Voltage [V]
Par. AN-25 Terminal 54 High
Ref./Feedb. Value
Par. AN-21 Terminal 54 High
Voltage[V]
Analog 54
S202=ON
Par. AN-24 Termi-
nal 54 Low Ref./
Feedb. Value
Par. AN-22 Terminal 54 Low Current [mA]
Par. AN-25 Terminal 54 High Ref./
Feedb. Value
Par. AN-23 Terminal 54 High Current[mA]
Pulse Input 29 Pulse Input 33
Par. E-62 Term. 29
Low Ref./Feedb.
Value
Par. E-60 Term. 29
Low Frequency
[Hz]
Par. E-63 Term. 29
High Ref./Feedb.
Value
Par. E-61 Term. 29
High Frequency
[Hz]
Par. E-67 Term. 33 Low
Ref./Feedb. Value
Par. E-65 Term. 33 Low
Frequency [Hz]
Par. E-68 Term. 33 High
Ref./Feedb. Value
Par. E-66 Term. 33 High
Frequency [Hz]
3.3.4 Dead Band Around Zero
In some cases the reference (in rare cases also the feedback) should have a Dead Band around zero (i.e. to make sure the machine is stopped when the reference
is “near zero”).
To make the dead band active and to set the amount of dead band, the following settings must be done:
• Either Minimum Reference Value (see table above for relevant parameter) or Maximum Reference Value must be zero. In other words; Either P1 or P2
must be on the X-axis in the graph below.
• And both points defining the scaling graph are in the same quadrant.
24
AF-650 GP Design Guide
The size of the Dead Band is defined by either P1 or P2 as shown in the graph below.
Thus a reference endpoint of P1 = (0 V, 0 RPM) will not result in any dead band, but a reference endpoint of e.g. P1 = (1V, 0 RPM) will result in a -1V to +1V dead
band in this case provided that the end point P2 is placed in either Quadrant 1 or Quadrant 4.
3
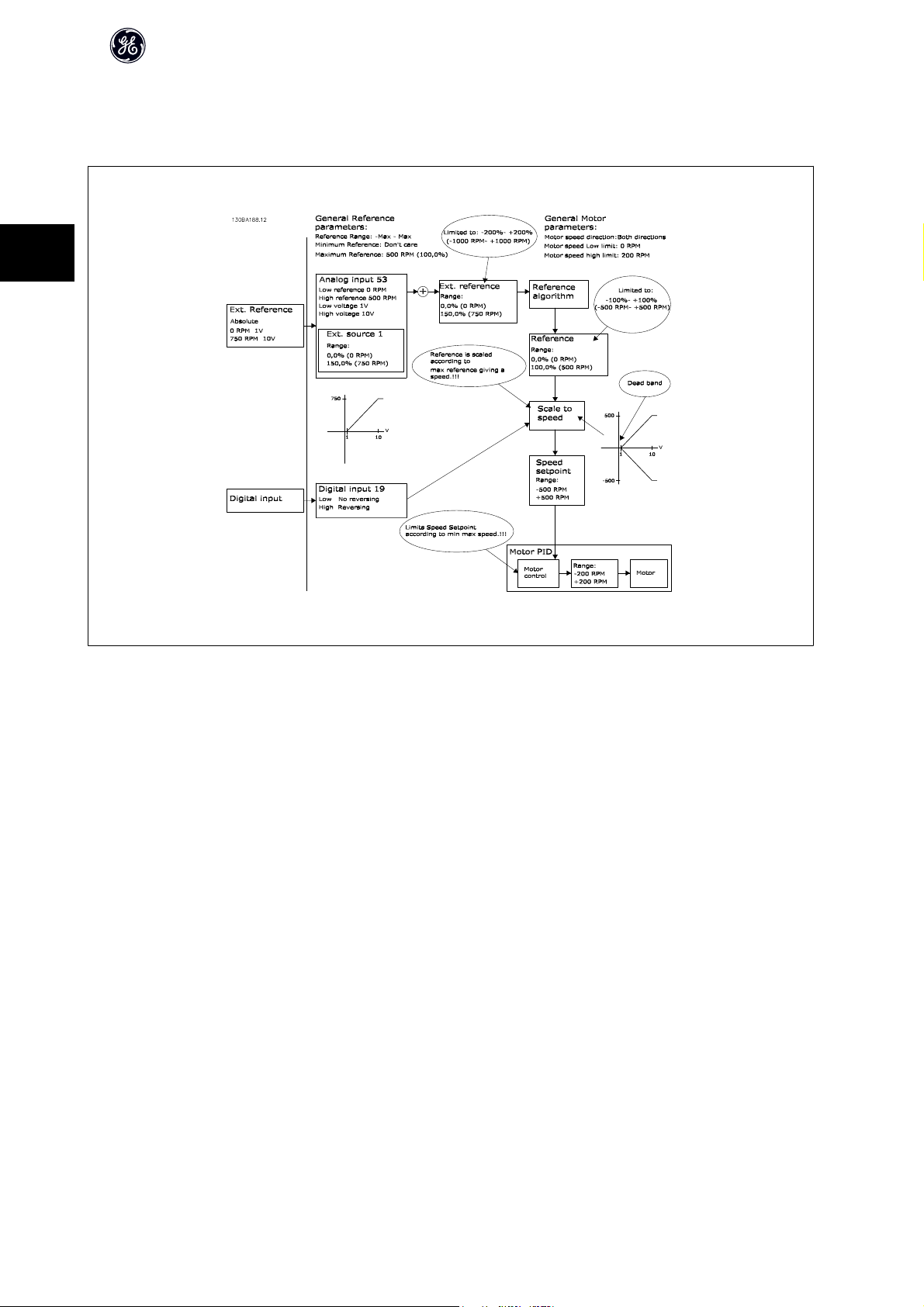
Case 1: Positive Reference with Dead band, Digital input to trigger reverse
This Case shows how Reference input with limits inside Min – Max limits clamps.
25
AF-650 GP Design Guide
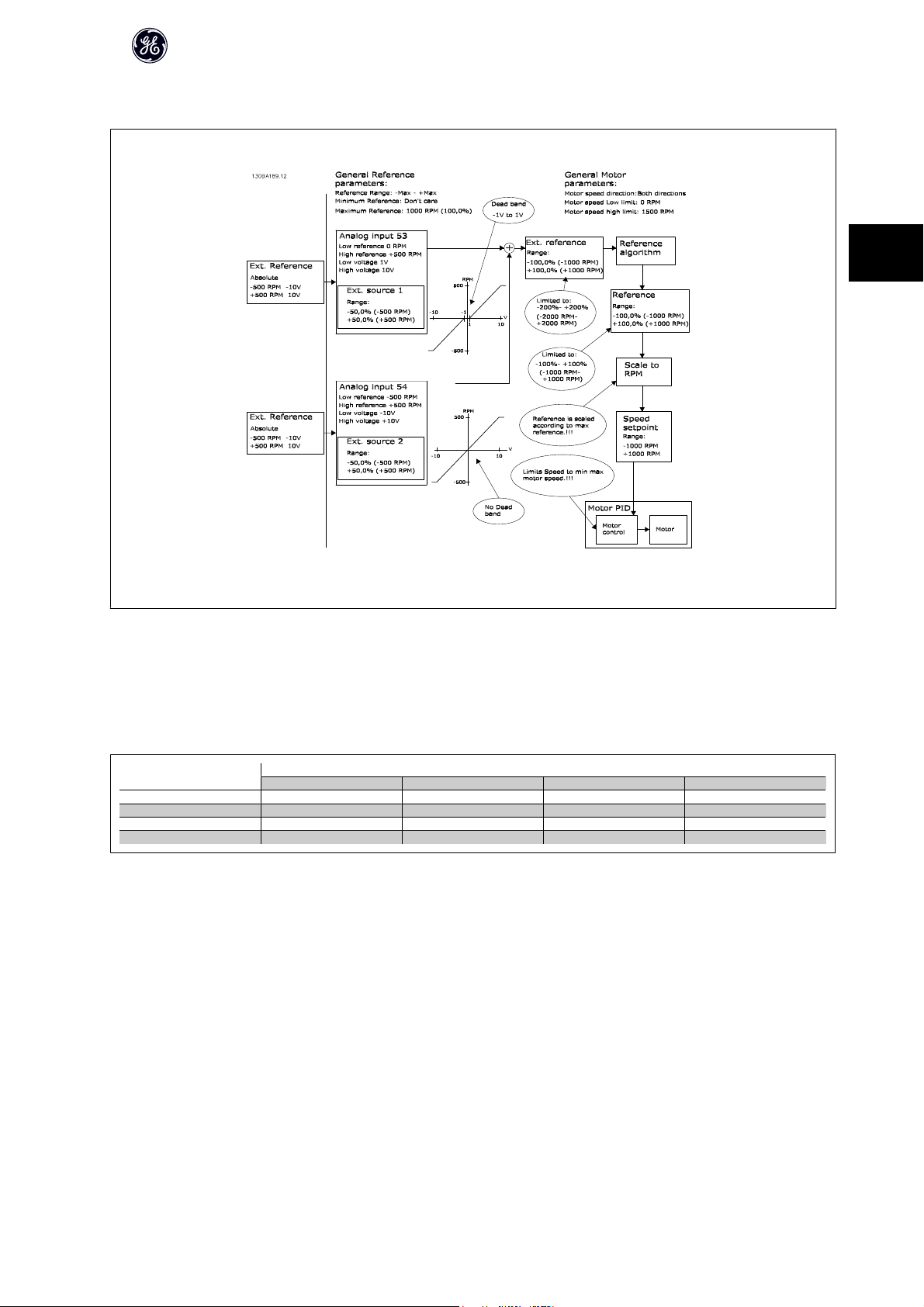
Case 2: Positive Reference with Dead band, Digital input to trigger reverse. Clamping rules.
This Case shows how Reference input with limits outside -Max – +Max limits clamps to the inputs low and high limits before addition to External reference. And
how the External reference is clamped to -Max – +Max by the Reference algorithm.
3
26
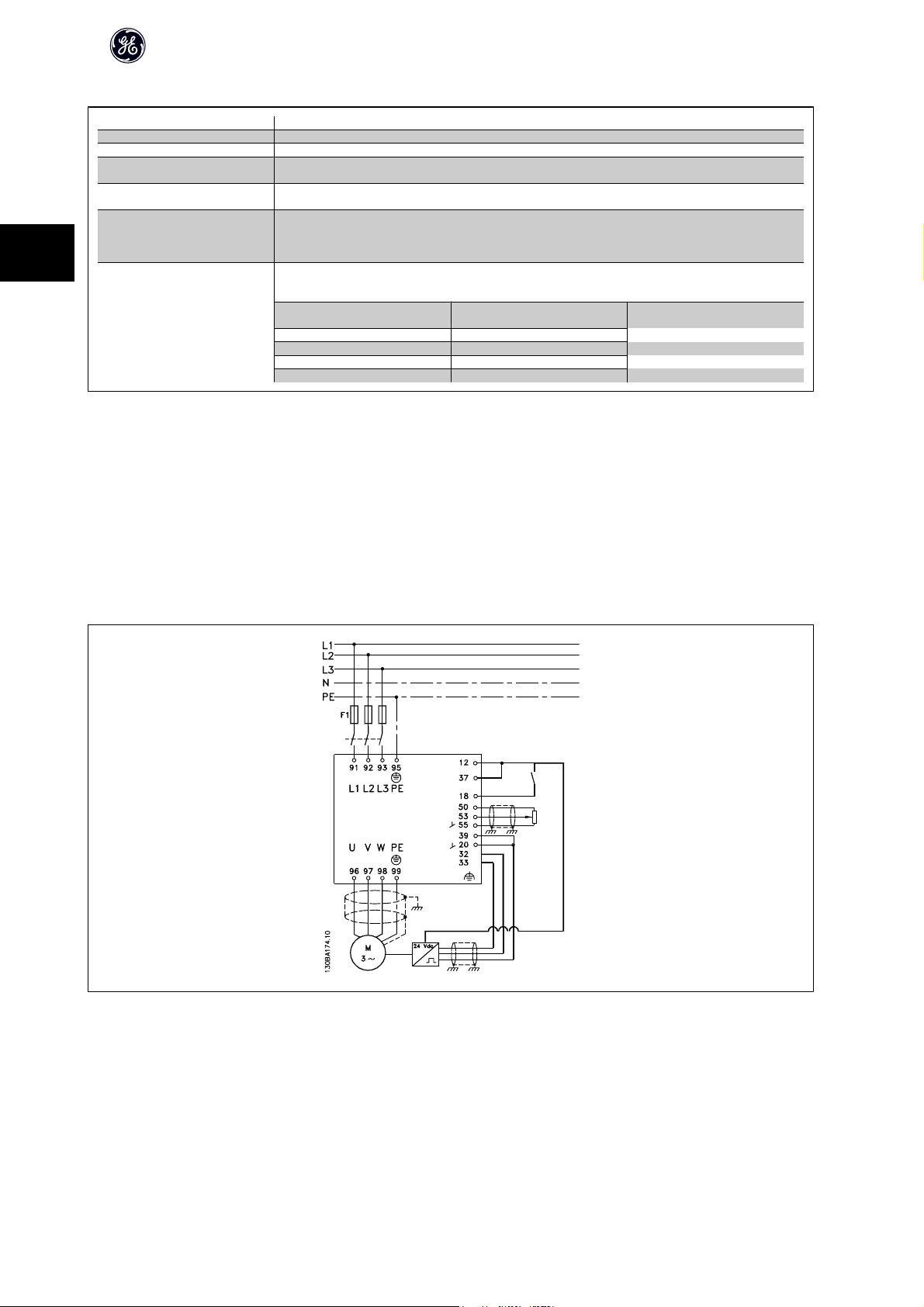
Case 3: Negative to positive reference with dead band, Sign determines the direction, -Max – +Max
AF-650 GP Design Guide
3
3.4 PID Control
3.4.1 Speed PID Control
The table shows the control configurations where the Speed Control is active.
Par. H-40 Configuration Mode
[0] Speed open loop Not Active Not Active ACTIVE N.A.
[1] Speed closed loop N.A. ACTIVE N.A. ACTIVE
[2] Torque N.A. N.A. N.A. Not Active
[3] Process Not Active ACTIVE ACTIVE
Note: “N.A.” means that the specific mode is not available at all. “Not Active” means that the specific mode is available but the Speed Control is not active in that
mode.
Note: The Speed Control PID will work under the default parameter setting, but tuning the parameters is highly recommended to optimize the motor control
performance. The two Flux motor control principles are specially dependant on proper tuning to yield their full potential.
Par. H-41 Motor Control Principle Motor Control Principle
U/f Advanced Vector Control Flux Sensorless Flux w/ enc. feedb
27
AF-650 GP Design Guide
The following parameters are relevant for the Speed Control:
Parameter
Par. PI-00 Speed PID Feedback Source Select from which input the Speed PID should get its feedback.
Par. PI-02 Speed PID Proportional Gain The higher the value - the quicker the control. However, too high value may lead to oscillations.
Par. PI-03 Speed PID Integral Time Eliminates steady state speed error. Lower value means quick reaction. However, too low value may lead to oscilla-
Par. PI-04 Speed PID Differentiation
Time
Par. PI-05 Speed PID Diff. Gain Limit If there are quick changes in reference or feedback in a given application - which means that the error changes
3
Par. PI-06 Speed PID Lowpass Filter
Time
Below is given an example of how to programme the Speed Control:
In this case the Speed PID Control is used to maintain a constant motor speed regardless of the changing load on the motor.
The required motor speed is set via a potentiometer connected to terminal 53. The speed range is 0 - 1500 RPM corresponding to 0 - 10V over the potentiometer.
Description of function
tions.
Provides a gain proportional to the rate of change of the feedback. A setting of zero disables the differentiator.
swiftly - the differentiator may soon become too dominant. This is because it reacts to changes in the error. The
quicker the error changes, the stronger the differentiator gain is. The differentiator gain can thus be limited to allow
setting of the reasonable differentiation time for slow changes and a suitably quick gain for quick changes.
A low-pass filter that dampens oscillations on the feedback signal and improves steady state performance. However,
too large filter time will deteriorate the dynamic performance of the Speed PID control.
Practical settings of par. PI-06 taken from the number of pulses per revolution on from encoder (PPR):
Encoder PPR Par. PI-06 Speed PID Lowpass Filter
Time
512 10 ms
1024 5 ms
2048 2 ms
4096 1 ms
Starting and stopping is controlled by a switch connected to terminal 18.
The Speed PID monitors the actual RPM of the motor by using a 24V (HTL) incremental encoder as feedback. The feedback sensor is an encoder (1024 pulses per
revolution) connected to terminals 32 and 33.
28
In the parameter list below it is assumed that all other parameters and switches remain at their default setting.
The following must be programmed in order shown - see explanation of settings in the Programming Guide.
AF-650 GP Design Guide
Function
1) Make sure the motor runs properly. Do the following:
Set the motor parameters using name plate data
Have the frequency converter makes an auto tune Par. P-04 Auto Tune [1] Enable complete auto tune
2) Check the motor is running and the encoder is attached properly. Do the following:
Press the “Hand” Keypad key. Check that the motor is running
and note in which direction it is turning (henceforth referred to as
the “positive direction”).
Go t o pa r . D R -2 0 Motor Angle. Turn the motor slowly in the positive
direction. It must be turned so slowly (only a few RPM) that it can
be determined if the value in par. DR-20 Motor Angle is increasing
or decreasing.
If par. DR-20 Motor Angle is decreasing then change the encoder
direction in par. E-81 Term 32/33 Encoder Direction.
3) Make sure the drive limits are set to safe values
Set acceptable limits for the references. Par. F-52 Minimum
Check that the ramp settings are within drive capabilities and
allowed application operating specifications.
Set acceptable limits for the motor speed and frequency. Par. F-18 Motor Speed
4) Configure the Speed Control and select the Motor Control principle
Activation of Speed Control Par. H-40 Configura-
Selection of Motor Control Principle Par. H-41 Motor Con-
5) Configure and scale the reference to the Speed Control
Set up Analog Input 53 as a reference Source
Scale Analog Input 53 0 RPM (0 V) to 1500 RPM (10V) AN-1# Not necessary (default)
6) Configure the 24V HTL encoder signal as feedback for the Motor Control and the Speed Control
Set up digital input 32 and 33 as encoder inputs Par. E-05 Terminal 32
Choose terminal 32/33 as motor feedback Par. H-42 Flux Motor
Choose terminal 32/33 as Speed PID feedback Par. PI-00 Speed PID
7) Tune the Speed Control PID parameters
Use the tuning guidelines when relevant or tune manually PI-0# See the guidelines below
8) Finished!
Save the parameter setting to the Keypad for safe keeping Par. K-50 Keypad
Par. no. Setting
P-02 to P-07
F-04 & F-05
Set a positive reference.
Par. DR-20 Motor An-
gle
Par. E-81 Term 32/33
Encoder Direction
Reference
par. F-53 Maximum
Reference
Par. F-07 Accel Time 1
par. F-08 Decel Time 1
Low Limit [RPM]
par. F-17 Motor Speed
High Limit [RPM]
par. F-03 Max Output
Frequency 1
tion Mode
trol Principle
Par. F-01 Frequency
Setting 1
Digital Input
par. E-06 Terminal 33
Digital Input
Feedback Source
Feedback Source
Copy
As specified by motor name plate
N.A. (read-only parameter) Note: An increasing value overflows at
65535 and starts again at 0.
[1] Counter clockwise (if par. DR-20 Motor Angle is decreasing)
0 RPM (default)
1500 RPM (default)
default setting
default setting
0 RPM (default)
1500 RPM (default)
60 Hz (default 132 Hz)
[1] Speed closed loop
[3] Flux w motor feedb
Not necessary (default)
[0] No operation (default)
Not necessary (default)
Not necessary (default)
[1] All to Keypad
3
3.4.2 Tuning PID Speed Control
The following tuning guidelines are relevant when using one of the Flux motor control principles in applications where the load is mainly inertial (with a low amount
of friction).
The value of par. PI-02 Speed PID Proportional Gain is dependent on the combined inertia of the motor and load, and the selected bandwidth can be calculated
using the following formula:
Par. PI
− 02 =
Note: Par. P-07 Motor Power [kW] is the motor power in [kW] (i.e. enter ‘4’ kW instead of ‘4000’ W in the formula). A practical value for the Bandwith is 20 rad/s.
Check the result of the Par. PI-02 Speed PID Proportional Gain calculation against the following formula (not required if you are using a high resolution feedback
such as a SinCos feedback):
Par. PI
− 02
Total inertia kgm
MAXIMUM
=
Par. P
0.01 x 4 x
2
x
par. P
− 07 x 9550
− 06
Encoder Resolution x Par. PI
2
x
π
x Bandwidth rad/s
− 06
x Max torque ripple
%
29
 Loading...
Loading...