

Page 1

Lift vector AC Drives
LIFT INVERTER
AGL50-EV
....Instruction manual
Page 2
Thank you for choosing this Gefran product.
We will be glad to receive any possible information which could help us improving this manual. The e-mail address is the following: techdoc@gefran.com.
Before using the product, read the safety instruction section carefully.
Keep the manual in a safe place and available to engineering and installation personnel during the product functioning period.
Gefran S.p.A has the right to modify products, data and dimensions without notice.
The data can only be used for the product description and they can not be understood as legally stated properties.
This manual is updated according to rmware versions V03.06.XX and V03.07.XX.
All rights reserved.
2 AGL50-EV
Page 3

Table of Contents
Safety Symbol Legend .................................................................................................................... 4
1 - Safety Precautions ..................................................................................................................... 4
1.1 Discharge time of the DC-Link .............................................................................................................................................6
2 - Introduction ................................................................................................................................6
3 - Environment ...............................................................................................................................7
3.1 Environmental Conditions ....................................................................................................................................................7
3.2 Storage and transport ..........................................................................................................................................................7
3.3 Standard ...............................................................................................................................................................................7
3.4 Input .....................................................................................................................................................................................8
3.5 AC Output ............................................................................................................................................................................. 9
3.6 Open-Loop and Closed-Loop control section .....................................................................................................................10
3.7 Accuracy .............................................................................................................................................................................10
3.8 Dimensions and installation guidelines ..............................................................................................................................11
4 - Wiring Procedure .....................................................................................................................13
4.1 Power Section ....................................................................................................................................................................13
4.2 EMC compliant electrical cabinet wiring rules ....................................................................................................................15
4.3 Cooling fans .......................................................................................................................................................................16
4.4 Regulation Section .............................................................................................................................................................17
4.5 RS 485 Serial Interface ......................................................................................................................................................18
4.5.1 RS485 serial terminals ..................................................................................................................................................................18
4.5.2 Serial protocol ...............................................................................................................................................................................18
4.6 Encoder Input .....................................................................................................................................................................19
5 - Drive Keypad Operation ..........................................................................................................20
5.1 Keypad ...............................................................................................................................................................................20
5.2 Moving through the drive main menu .................................................................................................................................21
5.3 Scrolling through the drive parameters ..............................................................................................................................22
5.4 Parameters modication ....................................................................................................................................................22
6 - Commissioning suggestions ..................................................................................................23
7 - Default lift conguration .......................................................................................................... 24
7.1 Command Logic .................................................................................................................................................................24
7.2 Lift Sequence .....................................................................................................................................................................28
7.2.1 Lift-dedicated digital output functions............................................................................................................................................29
7.2.2 Speed indication ...........................................................................................................................................................................30
7.3 Ramp Function ...................................................................................................................................................................30
7.3.1 Space calculation and acceleration / deceleration ramps settings ...............................................................................................30
7.3.2 Short Floor Function .....................................................................................................................................................................31
7.4 Startup Menu ......................................................................................................................................................................32
7.5 Menù Display .....................................................................................................................................................................36
7.6 Timer 1 function ..................................................................................................................................................................38
8 - Troubleshooting .......................................................................................................................40
8.1 Drive Alarm Condition ........................................................................................................................................................40
8.2 Alarm Reset ........................................................................................................................................................................ 40
8.3 List of drive alarm events ...................................................................................................................................................41
9 - Parameter list............................................................................................................................42
AGL50-EV 3
Page 4
Safety Symbol Legend
Caution
Warning
Warning
Attention
Indicates a procedure, condition, or statement that, if not strictly observed, could result in personal injury or
death.
Indicates a procedure, condition, or statement that, if not strictly observed, could result in damage to or destruction of equipment.
Indicates a procedure, condition, or statement that should be strictly followed in order to optimize these applications.
Note!
Indicates an essential or important procedure, condition, or statement.
1 - Safety Precautions
According to the EEC standards the AGL50-EV and accessories must be used only after checking that the
machine has been produced using those safety devices required by the 89/392/EEC set of rules, as far as the
machine industry is concerned. These standards do not apply in the Americas, but may need to be considered in equipment being shipped to Europe.
Drive systems cause mechanical motion. It is the responsibility of the user to insure that any such motion
does not result in an unsafe condition. Factory provided interlocks and operating limits should not be bypas-
sed or modied.
Electrical Shock and Burn Hazard:
When using instruments such as oscilloscopes to work on live equipment, the oscilloscope’s chassis should
be grounded and a differential amplier input should be used. Care should be used in the selection of probes
and leads and in the adjustment of the oscilloscope so that accurate readings may be made. See instrument
anufacturer’s instruction book for proper operation and adjustments to the instrument.
Fire and Explosion Hazard:
Fires or explosions might result from mounting Drives in hazardous areas such as locations where ammable
or combustible vapors or dusts are present. Drives should be installed away from hazardous areas, even if
used with motors suitable for use in these locations.
Strain Hazard:
Improper lifting practices can cause serious or fatal injury. Lift only with adequate equipment and trained
personnel.
Drives and motors must be ground connected according to the NEC.
Replace all covers before applying power to the Drive. Failure to do so may result in death or serious injury.
Adjustable frequency drives are electrical apparatus for use in industrial installations. Parts of the Drives are
energized during operation. The electrical installation and the opening of the device should therefore only be
carried out by qualied personnel. Improper installation of motors or Drives may therefore cause the failure of
the device as well as serious injury to persons or material damage. Drive is not equipped with motor overspeed protection logic other than that controlled by software. Follow the instructions given in this manual and
observe the local and national safety regulations applicable.
Always connect the Drive to the protective ground (PE) via the marked connection terminals (PE2) and the
housing (PE1). AGL50-EV Drives and AC Input lters have ground discharge currents greater than 3.5 mA.
EN 50178 species that with discharge currents greater than 3.5 mA the protective conductor ground connection (PE1) must be xed type and doubled for redundancy.
The drive may cause accidental motion in the event of a failure, even if it is disabled, unless it has been
disconnected from the AC input feeder.
Never open the device or covers while the AC Input power supply is switched on. Minimum time to wait before
working on the terminals or inside the device is listed in section 1.1.
4 AGL50-EV
Page 5
Do not connect power supply voltage that exceeds the standard specication voltage uctuation permissible.
Warning
Caution
If excessive voltage is applied to the Drive, damage to the internal components will result.
Do not operate the Drive without the ground wire connected. The motor chassis should be grounded to earth
through a ground lead separate from all other equipment ground leads to prevent noise coupling.
The grounding connector shall be sized in accordance with the NEC or Canadian Electrical Code.
The connection shall be made by a UL listed or CSA certied closed-loop terminal connector sized for the
wire gauge involved. The connector is to be xed using the crimp tool specied by the connector manufactu-
rer.
Do not perform a megger test between the Drive terminals or on the control circuit terminals.
Because the ambient temperature greatly affects Drive life and reliability, do not install the Drive in any location that exceeds the allowable temperature.
If the Drive’s Fault Alarm is activated, consult the chapter 8. TROUBLESHOOTING of this instruction book,
and after correcting the problem, resume operation. Do not reset the alarm automatically by external sequence, etc.
Be sure to remove the desicant dryer packet(s) when unpacking the Drive. (If not removed these packets may
become lodged in the fan or air passages and cause the Drive to overheat).
The Drive must be mounted on a wall that is constructed of heat resistant material. While the Drive is opera-
ting, the temperature of the Drive’s cooling ns can rise to a temperature of 194° F (90°C).
Note!
Do not touch or damage any components when handling the device. The changing of the isolation gaps or the
removing of the isolation and covers is not permissible.
Protect the device from impermissible environmental conditions (temperature, humidity, shock etc.)
No voltage should be connected to the output of the drive (terminals U2, V2 W2). The parallel connection of
several drives via the outputs and the direct connection of the inputs and outputs (bypass) are not permissible.
A capacitative load (e.g. Var compensation capacitors) should not be connected to the output of the drive
(terminals U2, V2, W2).
The electrical commissioning should only be carried out by qualied personnel, who are also responsible for
the provision of a suitable ground connection and a protected power supply feeder in accordance with the
local and national regulations. The motor must be protected against overloads.
No dielectric tests should be carried out on parts of the drive. A suitable measuring instrument (internal resi-
stance of at least 10 kΏ/V) should be used for measuring the signal voltages.
In case of a three phase supply not symmetrical to ground, an insulation loss of one of the devices connected to the same network can cause functional problem to the drive, if the use of a delta/wye transformer is
avoided (see par. 3.4).
If the Drives have been stored for longer than two years, the operation of the DC link capacitors may be
impaired and must be “reformed”.
Before commissioning devices that have been stored for long periods, connect them to a power supply for
two hours with no load connected in order to regenerate the capacitors, (the input voltage has to be applied
without enabling the drive).
Note!
The terms “Inverter”, “Controller” and “Drive” are sometimes used interchangably throughout the industry. We
will use the term “Drive” in this document.
AGL50-EV 5
Page 6

1.1 Discharge time of the DC-Link
Type In Time (seconds)
2040 10.1 300
2055 13 300
2075 17.7 300
Tabella 1.1 DC Link Discharge Times
This is the minimum time that must be elapsed since a Drive is disconnected from the AC Input before an operator may
service parts inside the Drive to avoid electric shock hazard.
Condition:
These values consider a turn off for a Drive supplied at 480Vac +10%, without any option, ( the charge
for the switching supply is the regulation card, the keypad and the 24Vdc fans “if mounted”).
The Drive is disabled. This represents the worst case condition.
2 - Introduction
AGL50-EV is a series of dedicated drives used to control lift asynchronous motors ranging from 4 to 7.5 kW.
Thanks to the special lift application software, it is best used in case of plant modernization and, in general, in all open
loop applications up to 1 m/s.
The easy and adaptable programming procedure can be managed via the alphanumeric keyboard or via the PC congurator and it allows the drive fast commissioning.
Available options on demand:
- External EMC input lters
- External Input / Output chokes
- External braking resistors (connected between terminals C and BR1).
6 AGL50-EV
Page 7
3 - Environment
Attention
3.1 Environmental Conditions
Installation location ��������������������� Pollution degree 2 or lower (free from direct sunligth, vibration, dust, corrosive or inammable
gases, fog, vapour oil and dripped water, avoid saline environment)
Installation altitude ���������������������� Max 2000m (3281 feet) above sea level; above 1000m a current reduction of 1.2% for every
100m (328 feet) of additional height applies.
Mechanical conditions for installation ������� Vibrational stress: EN 60721-3-3 Class 3M1
Operation temperature ������������������ -10…50°C (14°…122°F). At above 40°, 2% derating for each °C, at 50°, 20% derating.
Air humidity (operation) ������������������ 5 % to 85 %, 1 g/m3 to 25 g/m3 without moisture condensation or icing (Class 3K3 as per
EN50178)
Air pressure (operation) [kPa] ������������� 86 to 106 (Class 3K3 as per EN50178)
Drive shall operate under environmental service conditions (climatic, mechanical, pollution, ...) dened in
EN61800-2 as for “usual service conditions”.
3.2 Storage and transport
Temperature:
storage ������������������������������ -20…+55°C (-4…+131°F), (class 1K4 as per EN50178)
transport ����������������������������� -20…+60°C (-4…+140°F), class 2K3 as per EN50178,
Air humidity :
storage ������������������������������ 5% to 95 % (Class 1K3 as per EN50178)
transport: ���������������������������� 95 % (3) 60 g/m (4)
A light condensation of moisture may occur for a short time occasionally if the device is not in
operation (class 2K3 as per EN50178)
Air pressure:
storage ������������������������������ [kPa] 86 to 106 (class 1K4 as per EN50178)
transport ����������������������������� [kPa] 70 to 106 (class 2K3 as per EN50178)
(3) Greatest relative air humidity occurs with the temperature @ 40°C (104°F) or if the temperature of the device is brought suddenly from
-25 ...+30°C (-13°...+86°F).
(4) Greatest absolute air humidity if the device is brought suddenly from 70...15°C (158°...59°F).
3.3 Standard
General standards ���������������������� EN 61800-1, IEC 143-1-1.
Safety ������������������������������� EN 50178, EN 61800-5-1, UL508C,UL840 (PD2, OV3)
Climatic conditions ���������������������� EN 60721-3-3, class 3K3. EN 60068-2-2, test Bd.
Clearance and creepage ����������������� EN 50178, UL508C, UL840. Overvoltage category for mains connected circuits: III; degree of
pollution 2
Vibration ����������������������������� EN 60068-2-6, test Fc.
EMC compatibility ���������������������� EN 12015 (with optional external EMI lter), EN 12016
Rated input voltages �������������������� IEC 60038
Protection degree ���������������������� IP20 according to EN 60529
IP54 for the cabinet with externally mounted heatsink.
Approvals ����������������������������� CE according to LVD directives 2014/35 / EC and EMC 2014/30 / EC.
AGL50-EV 7
Page 8

3.4 Input
Caution
Safety
ground
L1
L2
L3
Earth
U1/L1
V1/L2
W1/L3
U2/T1
V2/T2
W2/T3
PE2/
All wires (including motor ground) must
be connected inside the motor terminal box
AC OUTPUT
CHOKE
AC Main Supply
AC INPUT
CHOKE
PE1/
Type 2040 2055 2075
Uln AC Input voltage [V] 3 x 380 V (-15%) ... 3 x 480 V (+10%)
Power supply system TT,TN
Maximum line voltage unbalance [%] 3 %
AC Input frequency [Hz] 50 Hz – 2 % ... 60 Hz + 2 %
THD of input current [%] > 100 % (without choke)
In AC Input current for continuous service ::
- Connection with 3-phase reactor
@ 400Vac; IEC 146 class 1 [A] 9 13 16
@ 480Vac; IEC 146 class 1 [A] 8.2 11.7 14.3
- Connection without 3-phase reactor
@ 400Vac; IEC 146 class 1 [A] 11 14 19
@ 480Vac; IEC 146 class 1 [A] 10 12.6 17
Max short circuit power without line reactor (Zmin=1%) [kVA] 500 650 850
Overvoltage threshold (Overvoltage) [V] 800Vdc
Undervoltage threshold (Undervoltage) [V] 380 Vdc (for 380,400Vac mains), 405 Vdc (for 420,440Vac mains),
415 Vdc (for 460,480Vac mains)
Braking IGBT Unit Standard internal (with external resistor);
Braking torque 150%.
Power Supply and Grounding
1) Drives are designed to be powered from standard three phase lines that are electrically symmetrical with respect
to ground (TN or TT network).
2) In case of supply with IT network, the use of delta/wye transformer is mandatory, with a secondary three phase
wiring referred to ground.
In case of a three phase supply not symmetrical to ground, an insulation loss of one of the devices connected to the same network can cause functional problem to the drive, if the use of a delta/wye transformer is
avoided.
Please refer to the following connection sample.
Mains connection and inverter output
The drivea must be connected to an AC mains supply capable of delivering a symmetrical short circuit current lower or
equal to the values indicated on table. For the use of an AC input choke see chapter 4.
Note from the table the allowable mains voltages. The cycle direction of the phases is free.
Voltages lower than the min. tolerance values can cause the block of the inverter.
Adjustable Frequency Drives and AC Input lters have ground discharge currents greater than 3.5 mA. EN 50178 species
that with discharge currents greater than 3.5 mA the protective conductor ground connection (PE1) must be xed type.
8 AGL50-EV
Page 9
AC Input Current
Note!
The Input current of the Drive depends on the operating state of the connected motor. The tables (chapter
3.4) shows the values corresponding to rated continuous service, keeping into account typical output power
factor for each size.
3.5 AC Output
Type 2040 2055 2075
Pn mot (recommended motor output):
@ Uln=400Vac; fsw=default [kW] 4 5.5 7.5
@ Uln=460Vac; fsw=default [Hp] 5 7.5 10
U2 Max output voltage [V] 0.98 x Uln (AC Input voltage)
f2 Max output frequency [Hz] 500 Hz (V/f)
In Rated output current::
@ Uln=400Vac; fsw=default [A] 10.1 13 17.7
@ Uln=480Vac; fsw=default [A] 8.6 11.7 14.9
Switching frequency fsw (Default) (5) [kHz] 8
Switching frequency fsw (higher) (5) [kHz] 10,12
Iovld [A] Short term overload current. 170% of In for 10s on 100s.
Derating factor
Kv (1) 0.87
Kt (2) 0.8
Kf (3) 0.85; 0.7
Kalt (4) 1.2
Braking unit intervention threshold (@ 380 V - 480 V) [Vdc] ON = 780 Vdc, OFF= 770 Vdc (6)
(1): Derating factor for mains voltage at 460 Vac
(2): Derating factor for 50°C ambient temperature (2 % each °C > 40 °C)
(3): Derating factor for higher switching frequency
(4): Derating factor for installation at altitudes above 1000 meters a.s.l.. Value to be applied at each 100 m increase
above 1000 m
(5) It is possible to set a xed switching frequency (from 4 to 12 kHz depending on size and with derating where applicable).
Otherwise it is possible to set a variable switching frequency between two levels (hswf and Iswf) dened according
to size, heat sink temperature and stator frequency:
Type Higher sw frequency
[kHz]
Lower sw frequency
[kHz]
F out
[Hz]
T
[°C]
2040 8 4 3 64
2055 8 4 3 60
2075 8 4 3 60
The output of the Drive is ground fault and phase to phase output short protected.
Nota!
The connection of an external voltage to the output terminals of the Drive is not permissible! It is allowed to
disconnect the motor from the Drive output, after the Drive has been disabled.
The rated value of direct current output ( Icont ) depends on the ambient temperature ( KT ) and the switching frequency
( Kf) if higher than the default setting:
Icont = In x Kt x Kf
(6) With parameter P.344 “BU threshold factor” is possible change the threshold in use:
BU-On In use (Vdc) = BU-On (Vdc) * P.344 / 100
AGL50-EV 9
Page 10
BU-Off In use (Vdc) = BU-Off (Vdc) * P.344 / 100
If P.344 = 90 that the thresholds in use are:
Mains Voltage Vdc Nominal BU-On In Use BU-Off In Use
(Vac) (Vdc) (Vdc) (Vdc)
380 535 702 693
400 564 702 693
420 592 702 693
440 620 702 693
460 648 702 693
480 676 702 693
3.6 Open-Loop and Closed-Loop control section
No. 1 Programmable Analog input: ���������Analog input 1 = -10...+10 V 0.5 mA max, 10 bit + sign / unipolar or bipolar
No. 1 Programmable Analog output: �������0 ... 10 V / 5 mA max
Analog output 1 = 0...+10V, 10 bit, Frequency output absolute value (default)
No. 6 Programmable Digital inputs: �������� 0...24V / 5 mA
Digital input 6 = Freq Sel 3 src (default)
Digital input 5 = Freq Sel 2 src (default)
Digital input 4 = Freq Sel 1 src (default)
Digital input 3 = Run Rev src (default)
Digital input 2 = Run Fwd src (default)
Digital input 1 = Enable src (default)
No. 1 Programmable Digital output: �������� Digital outputs 1 = Drive Ready (default)
No. 2 Programmable Relais Digital outputs: �� Relay Digital outputs 1 = Brake cont (default)
Relay Digital outputs 2 = Not in alarm (default)
Note!
Internal voltage supply: ������������������ + 21Vdc (±3 %), 75mA (Terminal 28)
024V (Terminal 26)
+ 10Vdc (±3 %), 10mA (Terminal 7)
- 10Vdc (±3 %), 10mA (Terminal 9)
Dig. out. 1 > open collector type: 30V / 40mA
Relais Dig. out. 1 and 2 > relay output type: 230Vac-2A / 30Vdc-2A
3.7 Accuracy
Reference value ����������������������� 0.1 Hz (Resolution of Reference preset via terminals)
0.1 Hz (Resolution of Reference preset via interface)
10 AGL50-EV
Page 11
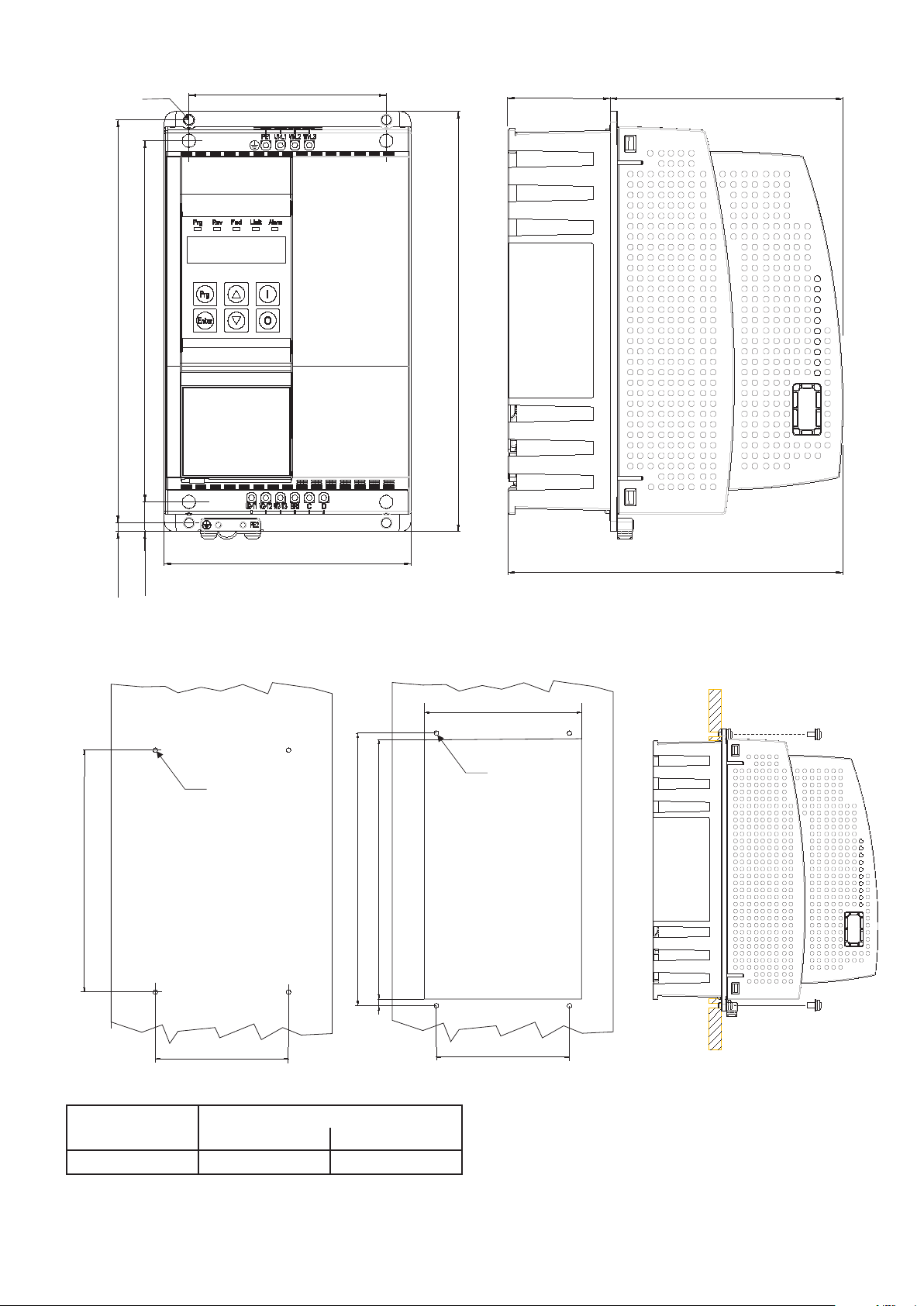
3.8 Dimensions and installation guidelines
104 (4.09)
212 (8.35)
190 (7.48)
4.6 (0.18)
15.5 (0.61)
130 (5.12)
221 (8.70)
176.5 (6.95)
122 (4.80)
M4
54.5 (2.15)
212 (8.35)
104 (4.09)
202 (7.95)
190 (7.48)
104 (4.09)
5 (0.2)
M4
123 (7.84)
M4
mm (inches)
Wall mounting Mounting with external dissipator
Type Weight
[kg] [lbs]
2040 ... 2075 3.0 6.6
AGL50-EV 11
Page 12

Mounting Clearance
10mm
0.39()
150 mm (6)
50 mm (1.97)
20 mm
(0.79)
150 mm (6)
10mm
(0.39)
The Drives must be mounted in such a way that the free ow of air is ensured.
The clearance to the device must be at least 150 mm (6 inches).
A space of at least 50 mm (2 inches) must be ensured at the front.
Maximum angle of inclination: 30° with respect to the vertical axis.
Devices that generate a large amount of heat must not be mounted in the direct vicinity of the frequency inverter.
Fastening screws should be re-tightened after a few days of operation.
12 AGL50-EV
Page 13

4 - Wiring Procedure
4.1 Power Section
U1/L1, V1/L2, W1/L3 AC mains voltage (3 x 380 V (-15%) ... 3 x 480 V (+10%)
PE1 Mains ground connection (on terminal)
BR1 Braking unit resistor command (braking resistor must be connected between BR1 and C)
C, D Intermediate circuit connection
U2/T1, V2/T2, W2/T3 Motor connection
PE2 Motor ground connection (on chassis)
Maximum cable cross-section Recommended
stripping
(mm2) (AWG) (mm) (Nm)
2040 - 2055 - 2075 4 (rigid) / 2.5 (exible) 12 8 0.5…0.6
Note!
Use 60°C / 75°C copper conductor only.
External fuses of the power section
The inverter must be fused on the AC Input side.
Use fast-acting fuses only. Use the fuses shown in the table below.
Connections with three-phase inductance on AC input will improve the DC link capacitors life time.
Sizes
DC link capacitor hours
of service life [h]
Type Code Type Code
Europa America
2040 10000 GRD2/20 F4D15 A70P20 S7G48
2055 10000 GRD2/25 F4D16 A70P30 S7I50
2075 10000 GRD2/25 F4D16 A70P30 S7I50
External fuses of the Power Section DC input side
Tightening
torque (min)
Use fast-acting fuses only. Use the fuses shown in the table below.
Sizes
Type Code Type Code
Europa America
2040 GRD2/20 F4D15 A70P20 S7G48
2055 GRD2/25 F4D16 A70P30 S7I50
2075 GRD2/25 F4D16 A70P30 S7I50
Fuse manufacturers: Type GRD... , Z14... 14 x 51 mm Jean Müller, Eltville
A70... Ferraz
FWP... Bussmann
Input chokes
The three-phase mains choke is strongly recommended in order to:
- limit the RMS input current of the AGL50-EV inverter.
- increase the life of intermediate circuit capacitors and reliability of input diodes.
- reduce the harmonic distortion of the current absorbed by the grid to typical values of 70% (with rated current)
Sizes THD In @ 400 V [A] Type Code
2040
2055 13 LR3y-2055 S7AB5
< 70 %
9 LR3y-2040 S7AAG
2075 16 LR3y-2075 S7AB6
AGL50-EV 13
Page 14
Use the following AC chokes to reduce the line current THD even more (< 35%).
Warning
Sizes THD In @ 400 V [A] Type Code
2040
2055 12 LR3y-2055-35% S7HB2
< 35%
8 LR3y-2040-35% S7HB1
2075 15 LR3y-2075-35% S7FO9
Output chokes
Output chokes are used to reduce the effects of the dv/dt of the power modules (IGBT). Voltage fronts can damage the
electrical insulation of the motors or, if the motor cables are long (typically more than 100 m in length) or highly capacitive, they can cause drive malfunctions and the repeated generation of overcurrent (OC) or desaturation (OCH) alarms.
The output chokes are listed in the table below:
Sizes
Mains
inductance
[mH]
Rated
current
[A]
Saturation
current
[A]
Type Code
2040 0.87 10.1 20 LU3-QX02 S7FL3
2055 0.87 16 34 LU3-005 S7FG3
2075 0.51 27 57 LU3-011 S7FG4
Internal braking unit
Internal braking units with external braking resistors (wired between terminals C and BR1) are used to prevent dangerous
DC link voltage levels in case of braking. Technical data of the internal braking unit (50% duty cycle)
Sizes Rated current
[Arms]
Peak current
[Apeak]
Minimum braking R value
[Ohm]
2040 5.7 8 100
2055 8.5 12 67
2075 8.5 12 67
Braking Resistors
The braking resistors can be subject to unforeseen overloads due to possible failures.
The resistors have to be protected using thermal protection devices. Such devices do not have to interrupt
the circuit where the resistor is inserted but their auxiliary contact must interrupt the power supply of the drive
power section. In case the resistor foresees the precence of a protection contact, such contact has to be used
together with the one belonging to the thermal protection device.
Recommended resistors for use with internal braking unit:
Max Overload
energy, 30”- duty-
cycle 25%
[kJ]
Pn cont
(*)
[W]
Sizes Resistor type Code
Max Overload
energy, 1”- duty-
cycle 10%
2040 RF 200 100R S8SA15 1.5 4 200 100
2055 RF 200 68R S8SA14 1.5 4 200 68
2075 RF 400 68R S8SA16 3.5 10 400 68
Resistors protection degree: IP44.
The braking resistor is optional and has always to be mounted externally.
(*) rated power with continuous operation. Without heat sink.
If the resistors are mounted on unpainted radiation plates (thermal resistance shown) the power ratings are
those shown in the table below. In overload conditions, heavier duty cycles can be set proportional to the
power ratings.
14 AGL50-EV
Rbr
[Ohm]
Page 15

Sizes
Warning
Caution
Radiator Therm. Res.
( °C/W )
RF 200 100R 0.75 400
RF 200 68R 0.55 550
RF 400 68R 0.4 750
Optional EMC lters
An external EMI lter can be used to meet the requirements of EN 12015.
P Cont. serv.
( W )
Sizes Filter type Code
EN61800-3
(Motor cable length)
2040 EMI-FTF-480-7 S7GHL 5 m
2055 EMI-FTF-480-16 S7GHO 5 m
2075 EMI-FTF-480-16 S7GHO 5 m
4.2 EMC compliant electrical cabinet wiring rules
In a domestic environment, this product may cause radio inference, in which case supplementary mitigation
measures may be required.
Panels and cabinets
Mounting panel and cabinet (including the doors) have to be grounded, with a direct connection to the ground bus, using
strapwire.
Removal of the paint from the support areas
The paint should be removed from the choke, mounting panel and chassis support areas.
The anodized aluminium does not conduct.
Ground terminals of the inverter
The inverters are provided with two ground terminals: one must be connected to the ground bus and the other to the lter.
Ground terminal of the choke
The earth terminal of the choke must be connected to the ground bus.
Shielding of cables for analog signals
Analog signals must be shielded (each signal must be contained in the screen united with the zero volt), the same is true
for the constant references (E.g.. 10V). The shield must be grounded at 360° using the omega connectors available on
the support panel of the regulation board. This is in front of the terminals strip on the bar above the board.
Note!
Cable shields should be grounded at one end only.
Min. distance between signal and power cables
The minimum distance between parallel signals and power cables is 30cm (12 inches). Possible crossings have to be
made at 90°. In case of double cabinets (entry to the insde of the cabinet on both sides with 2 different panels installed)
it is advisable to have all signals cables conveyed into troughs mounted on the inverter side (front) and to pass motor
cables on the other side (back) trough. In case of single cabinets, it is advisable to let the power cable run vertically, while
signal cables run horizontally, keeping the maximum possible distance.
Shielding of the supply for an AC motor
The AC motors have to be supplied through a four pole shielded cable (three phases plus a green/yellow ground wire),
or through four unshielded cables, which are inserted inside a metal channel. It is important that a direct connection (four
cables) between the panel grounding and the motor ground has been made and that the fourth cable had been inserted
in a shield.
AGL50-EV 15
Page 16
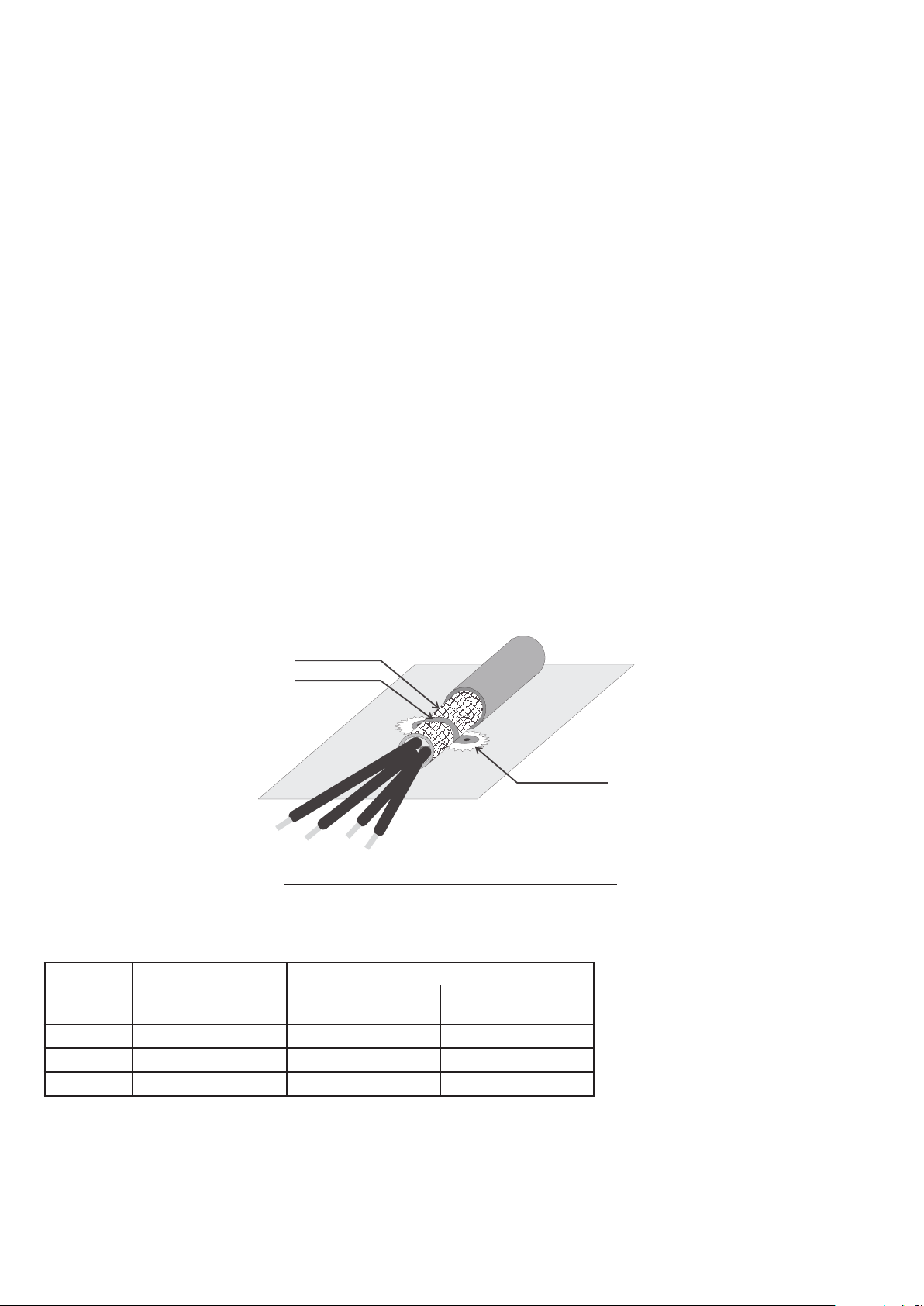
Ground connection to both sides of the cable shield (AC motor)
Schermo/Shield
Connettore Omega
Omega connector
Area non verniciata
Not painted area
Pannello di fissaggio
Mounting panel
The shield of the supply cable of the AC motors must be grounded on both sides in order to obtain 360° contact, that
means the whole shield. This can be accomplished using suitable metallic EMC cables press grounded at a full 360° at
the input of the cabinet and of the motor’s terminal strip. If this connection is not possible, the shielded cables should
be brought inside the cabinet and connected with an omega connector to the mounting panel. The same must be done
on the motor side. In case a 360° connection on the motor’s terminal strip is not possible, the shield must be grounded
before entering into the terminal strip. This should be done on the metal support of the motor, using an omega connector
(see gure). In case a metal duct has to be used, it should be grounded at a full 360° where possible.
Pigtail avoidence
While grounding the shieldes of the cables, one has to use a 360° connection (E.g.: omega bus as in the gure 4.2) with
a pigtail connection to be absolutely avoided. By pigtail is meant the connection to earth ground of the cable shield by
means of an additional wire.
Direct connection between the ground bus and motor chassis
Independently from ground-connection of the motor’s chassis, it must always be connected to the ground wire (yellow/
green) coming from the panel ground bus.
Max length of the AC motor’s cables inside the cabinet
From the grounding of the screen side cabinet of the inverter terminal strip, the supply’s cables have to measure 5 meters
(16.4 feet) maximum.
Mounting sequence for EMI-... lters with inverter
In case of inverters, these lters have to be serie-connected between the inverter and the AC mains. The connection
between the lter and inverter’s terminals must be done with a four poles cable, whose max.length is 30 cm. (12 inches).
If that connection is longer, the cable must be shielded.
Grounding of EMI-... lters with inverter
The yellow/green ground wire of the four poles cable must be connected on one side directly to one of the two gounding
terminals of the inverter, the other side to one of the two lters grounding terminals. The other grounding terminal of the
lter must be brought directly to the grounding bus of the cabinet.
Figura 4.2.OMEGA plug: grounding 360° of a shielded cable.
4.3 Cooling fans
No connection is required, the internal fans are power supplied by an internal circuit.
Sizes Heat dissipation) Fan capacity
Heat sink
[W]
[m3/h]
2040 180 20 -
2055 205 2 x 20 -
2075 280 2 x 20 11
16 AGL50-EV
Internal
[m3/h]
Page 17
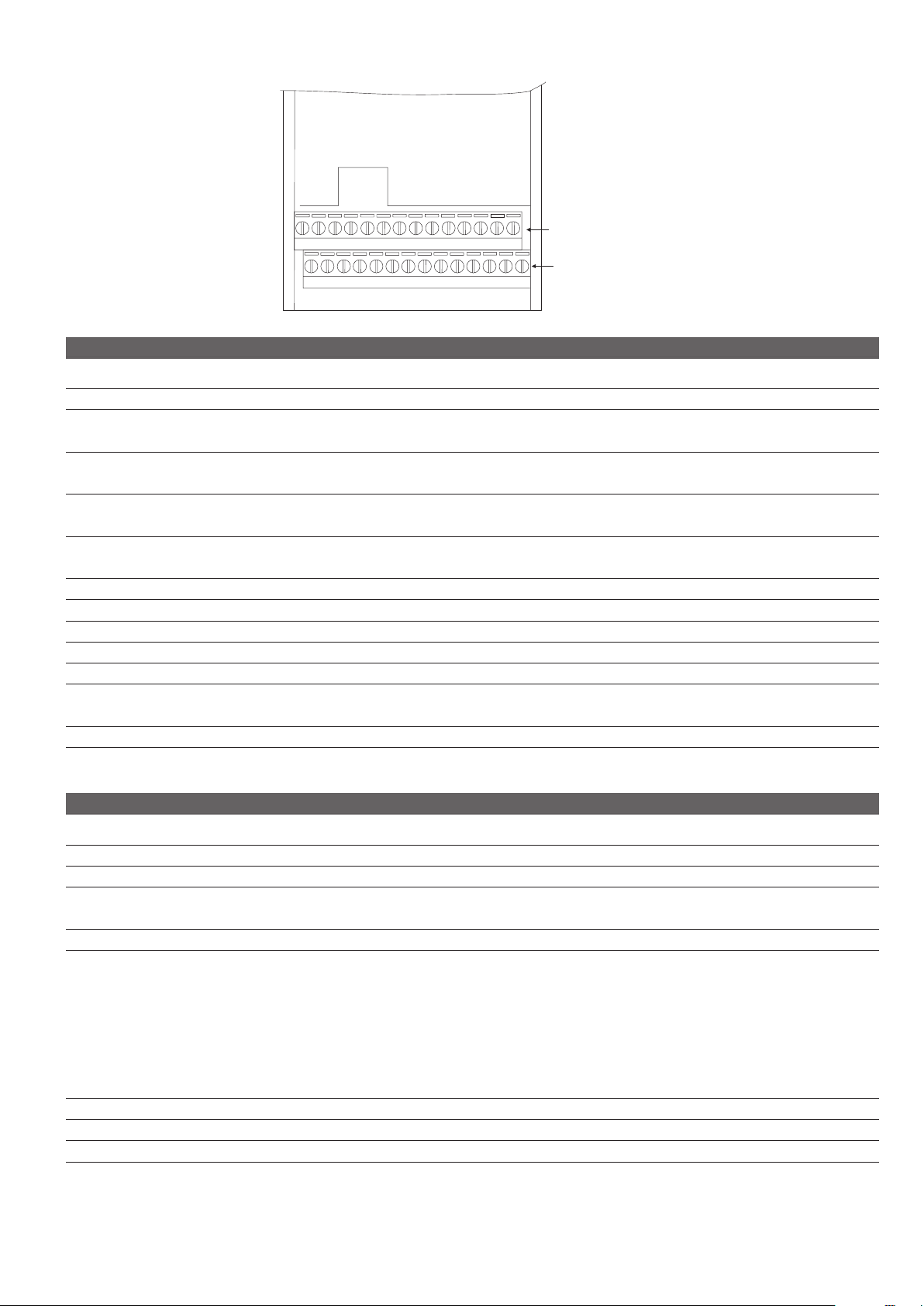
4.4 Regulation Section
Strip1
Strip2
141618
19
21 2725
20
23
24
22 2826
9
11
3
1
5
4
2
6
131517
7
10
12
8
S T R I P 1
Term. Designation Function (Signal level MAX)
1/3 n.a.
5 Analog output 1 VOLTAGE programmable analog output (0...10V)
Default : I.300 = [0] Freq out abs (0...10V / 5mA)
7 + 10V OUT + 10 Vdc potential voltage reference
Default : n.a. (+10Vdc / 5mA, max 10mA)
9 - 10V OUT - 10 Vdc potential voltage reference
Default : n.a. (-10Vdc / 5mA, max 10mA)
11 Digital output 1+ Programmable digital output (Optomos)
Default : I100 = [51] Contactor (+30V / 40mA)
13 Digital output 1- Programmable OPEN COLLECTOR digital output (negative terminal)
15 RS485 Link+ Link+ (RxA / TxA) signal of RS 485 serial line
17 RS485 Link- Link- (RxB / TxB) signal of RS 485 serial line
19 RS 485 eq. ref. Equipotential reference of RS 485 serial line
21 COM Relay 1 Common contact RELAY 1 digital output (250Vac / 2A, 30Vdc / 2A)
23 Digital output 1 Programmable RELAY digital output, NO contact (250Vac / 2A, 30Vdc / 2A)
Default : I101 = [54] Brake cont
25 COM Relay 2 Common contact RELAY 2 digital output (250Vac / 2A, 30Vdc / 2A)
17 Digital output 2 Programmable RELAY digital output, NO contact (250Vac / 2A, 30Vdc / 2A)
Default : I102 = [02] No alarms
S T R I P 2
Term. Designation Function (Signal level MAX)
2/4 n.a.
6 COM analog. In/Out Potential reference of analog inputs/outputs -
8 Analog input 1 Programmable VOLTAGE analog input
Default : I.200 = [1] -10...+10V (±10V / 0.5mA)
10 0 V 24 0 V 24 potential reference
Programmable digital inputs (24Vdc/ 5mA, 12...30Vdc max)
12 Digital input 1 Default : I.000 = Enable src
14 Digital input 2 Default : I.001 = Run Fwd src
16 Digital input 3 Default : I.002 = Run Rev src
18 Digital input 4 Default : I.003 = Freq sel 1 src
20 Digital input 5 Default : I.004 = Freq sel 2 src
22 Digital input 6 Default : I.005 = Freq sel 3 src
24 COM Digital inputs 0 potential reference of digital inputs
26 0 V 24 0 V 24 potential reference
28 + 24V OUT + 24 Vdc potential voltage reference (+21Vdc / 75mA)
n.a. = not assigned
AGL50-EV 17
Page 18
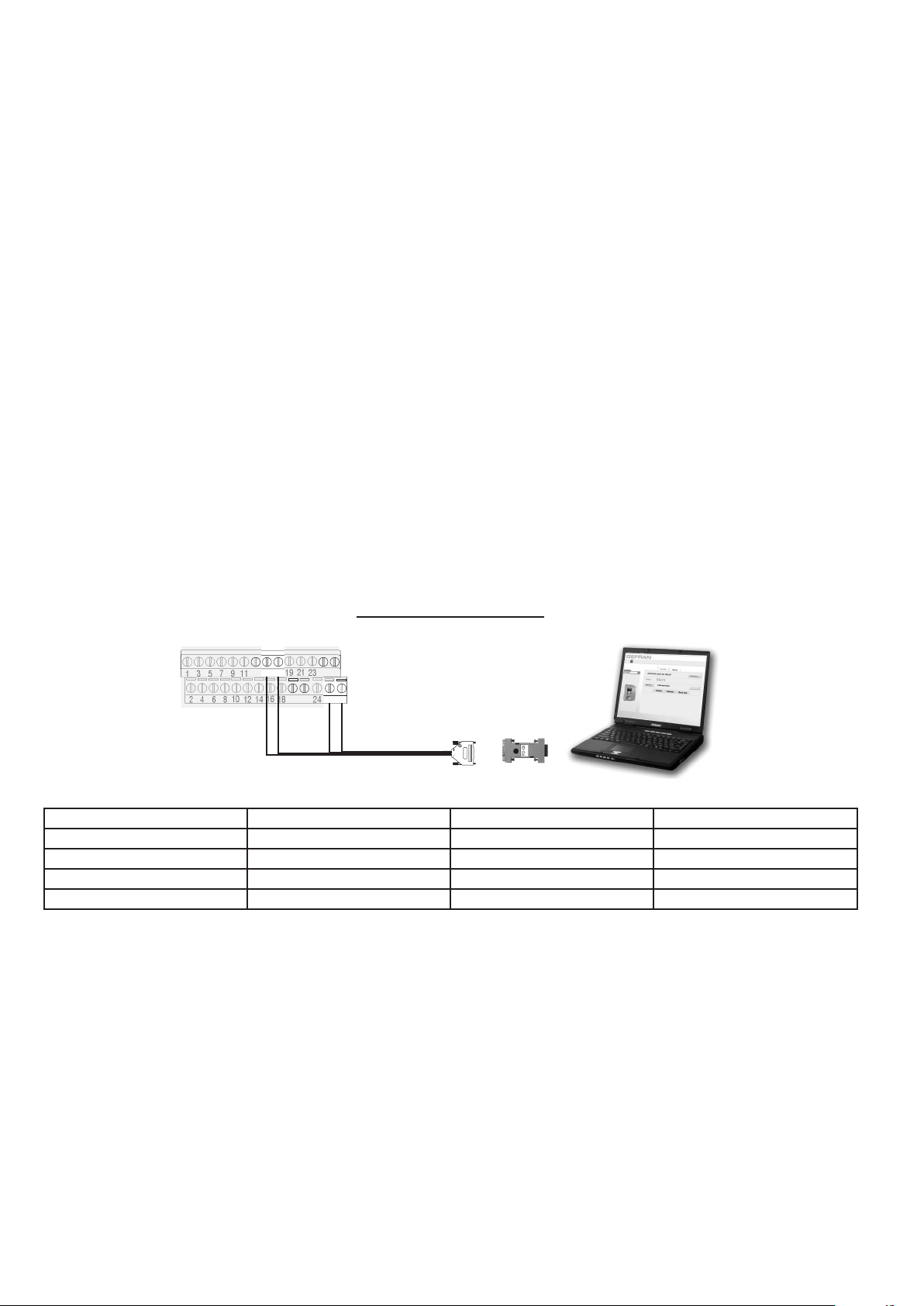
4.5 RS 485 Serial Interface
XS1 - Drive Side
XS2 - PC Side
The RS 485 serial line on the drives of the AGL50-EV series allows the data transmission through a loop made of two
symmetrical conductors, which are twisted with a common shield. The maximum transmission speed is 38400 Baud.
The transmission is performed via a standard RS 485 differential signal (half-duplex).
If two or more drives are connected on the serial line (Multidrop conguration), the OPT-QX option has to be used on each
device.
This option has to be inserted between the inverter terminals and the transmission data cable.
With the Multidrop conguration it is possible to connect a maximum of 20 units of AGL50-EV inverters (for further details
see the OPT-QX manual).
The shield of serial line cable must be connected to the ground.
4.5.1 RS485 serial terminals
The RS 485 serial line is supplied through 15, 17 and 19 terminals, placed on the regulation card of the inverter.
The differential signal is transmitted on the Pin 15 (TxA/RxA) and on the Pin 17 (TxB/RxB). Terminal 19 is used as
equipotential reference of the serial line.
Note!
As for the connection of the serial line, make sure that the power cables and the cables controlling the contactors and the auxiliary relays are located into different panduits.
4.5.2 Serial protocol
The serial protocol is set via the “I.600 - Serial link cfg” parameter, which allows the selection of the following types:
proprietary protocol FoxLink, RTU Modbus (default) and Jbus.
The serial address is set via the “I.602 - Device address” parameter. Further details about the parameter transmission,
the parameter type and the value range can be found in the tables of Chapter 7.1 (INTERFACE Menu / Serial Conguration).
Figure 4.5.2.1: Serial Connections
21
13
911151719
3
7
1
5
10
12
4
2
141618
8
6
Giallo / Yellow
PCI-QX Wire colour Signal AGL50-EV terminals
Pin 3 Yellow Link + 15
Pin 7 Green Link - 17
Pin 1 Brown + 24V Supply 28
Pin 8 White 0V Supply 26
25
23
27
28
26
24
2220
Verde/Green
Bianco/White
Marrone/Brown
Cavo standard / Standard cable
cod. S7QAF9
PCI-QX Interface
18 AGL50-EV
Page 19
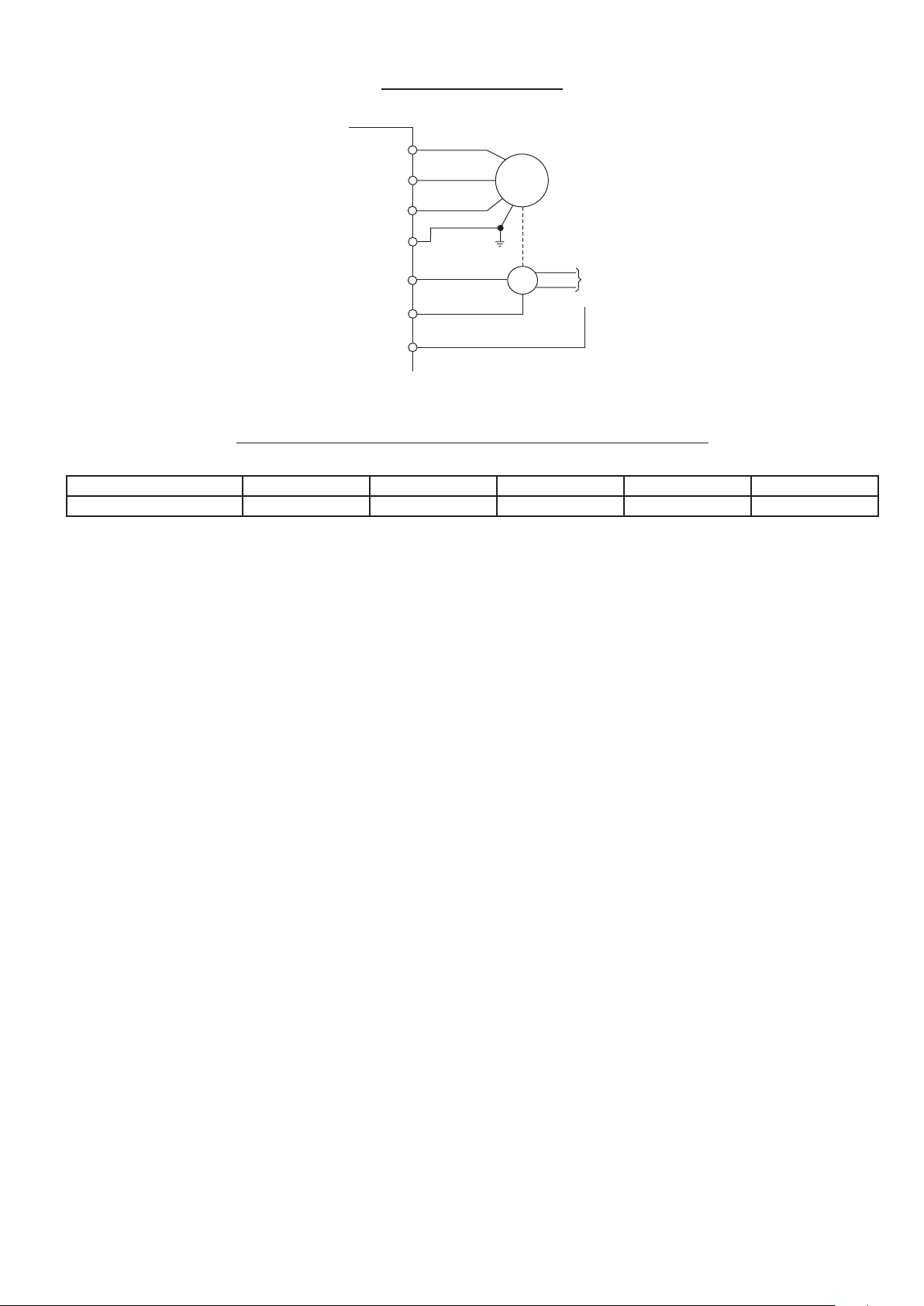
4.6 Encoder Input
Digital Input
power supply
Figure 4.6.1: encoder connection
U2/T1
V2/T2
M
W2/T3
PE2
20
22
24
Channel A
Channel B
5
Digital Input 6
COM
Table 4.6.1: Recommended Cable Section and Length for the Connection of Encoders
+24V
E
External
024V
Cable section [mm2] 0.22 0.5 0.75 1 1.5
Max Length. m [feet] 27 [88] 62 [203] 93 [305] 125 [410] 150 [492]
Requirements:
Digital encoder:
• max frequency: 25 kHz (select the appropriate number of pulses depending on required max. speed)
• Channels :
- one-channel: A (one-channel complementary A-,NOT allowed)
- two-channel: A and B (two-channel complementary A- and B-, NOT allowed).
Encoder loss detection is not possible.
• Power supply: + 24V externally supplied.
• The digital inputs common (terminal 24) have to be rightly connected to the external supply:
- to 0 V of supplier, if the encoder is PNP type
- to + 24 V of supplier, if the encoder is NPN type.
Note!
If Digital input 5 and Digital input 6 are used as encoder input, I.004 and I.005 must be set to [0] None.
Than encoder feedback parametrizzation must be execute.
AGL50-EV 19
Page 20
5 - Drive Keypad Operation
Caution
Codice parametro
(Menu + numero da 000 a 999)
Menu:
d
S
I
=DISPLAY
=STARTUP
=INTERFACE
F
P
A
C
=FREQ & RAMPS
=PARAMETER
=APPLICATION
=COMMAND
Limit Alarm
Prg
Rev Fwd
In this chapter the parameters management is described, by using the drive keypad.
5.1 Keypad
Changes made to parameter have immediate effect on drive operation, but are not automatically stored in
permanent memory. An explicit command is required to permanently store the parameters: “C.000 Save
parameters”.
Rev Fwd Limit AlarmPrg
Prg
Enter
Prg Scroll menù: Allows navigation thruogh the drive main menu (d.xxx, S.xxx, I.xxx, F.xxx, P.xxx, A.xxx and
C.xxx). Also used to exit the editing mode of a parameter without appling the changes.
E Enter key: Used to enter the editing mode of the selected parameter or to conrm the value.
▲ UP key: Used to scroll up through parameters or to increase numeric values while in editing mode; it can
also be used to increase motorpotentiometer reference value, when F.000 Motorpot ref parameter
is displayed (F, FREQ RAMP menu).
▼ DOWN key: Used to scroll down through parameters or to decrease numeric values while in editing mode; it
can also be used to decrease motorpotentiometer reference values, when F.000 Motorpot ref
parameter is displayed (F, FREQ RAMP menu).
I Start key: Used to START the drive via keypad; requirements:
+24V between 12 & 26 terminals (Enable)
+24 V between 14 & 26 terminals (Run Fwd) or + 24 V between 16 & 26 terminals (Run Rev)
P.000 Cmd source sel = [1] CtlWrd & kpd parameter setting
O Stop key: Used to STOP the drive via keypad;
Keypad LED’s meaning:
PRG (Yellow Led) Flashes if the parameters have not been permanently saved to memory.
REV (Green Led) Reverse running
FWD (Green Led) Clockwise motor rotation
Limit (Yellow Led) Inverter limit state
Alarm (Red Led) Inverter alarm state
Note!
The FWD LED lights up during the direct current injection phase (start and stop).
20 AGL50-EV
Page 21

5.2 Moving through the drive main menu
settings
Soon after, the keypad display will show d.000 Output frequency parameter of DISPLAY menu.
0.00
Prg
Prg
d.000
Prg
S.000
Prg
I.000
Prg
F.000
Prg
P.000
Prg
Menu of read-only parameters (display)
Menu of basic drive start up parameters
Menu of input/output drive settings
(digital/analog)
Menu of multi frequencies and ramps
Menu of read/write drive parameters
A.000
Prg
C.000
Menu of PID function settings
Menu of control-type parameters
(Save, Load default, etc.)
AGL50-EV 21
Page 22

5.3 Scrolling through the drive parameters
----------------
S.000
S.001
S.100
S.901
E
Decrease
Increase
E
To confirm
new setting
S.200
10.0
0.0
-200.0
STARTUP menu example:
5.4 Parameters modication
Example: how to change a frequency reference (STARTUP menù ).
Note!
Same procedure is also valid to Enable/Disable a function (ex.: S.301 Auto boost en) or program the drive I/
Os (i.e.: I.100 Dig output 1 cfg, etc. …).
22 AGL50-EV
Page 23

6 - Commissioning suggestions
Before changing the parameter settings make sure that the starting values are default values.
Change the parameters one at the time; if the change on any parameter is not effective, restore the parameter initial value before changing another one.
• In order to avoid problems linked to running comfort, it is advisable to perform a preliminary control of the motor
parameters.
Check in the STARTUP menu that the value set in the following parameters corresponds to the motor nameplate
data:
S.100 Base voltage Inverter maximum output voltage (Vrms).
S.101 Base frequency Motor base frequency (Hz).
S.150 Motor rated curr Motor rated current (Arms).
S.151 Motor pole pairs Number of motor polepairs.
S.152 Motor power fact (cos phi) Motor input power factor with rated current and voltage.
• In order to avoid too high settings of the acceleration and deceleration values (jerk), make sure that the slowing-down
distances correspond to those listed in the table:
Suggested slowing-down distances
Plant rated speed (m/s) 0,6 0,8 1,0
Suggested slowing-down distance (mm) 800 1000 1300
Such distances grant a high running comfort with the factory set jerk values.
• The default speed levels can be selected on the terminal 18. It is advisable to use the frequencies as follows:
S.200 Frequency ref 0 Slow speed: it is the oor reaching speed (frequency)
S.201 Frequency ref 1 High speed: it is the rated speed (frequency) required by the motor for that
specic plant.
Other speeds (maintenance, rephasing procedure etc.) can be selected as per table 7.2.
• In the open loop plants (without encoder), the boost can be increased if the lift car tends to rotate in the opposite
direction during the starting phase or if it can not start in spite the running speed has been set (S.300 Manual boost,
default = 3). The boost should be gradually increased by 1% at the time. Too high values cause the intervention of
the current limit alarm.
AGL50-EV 23
Page 24

7 - Default lift conguration
Lift commands are part of a dedicated control word. Each command is assigned to a physical digital input terminal. All
the main commands are given from the DI on the standard regulation board (see table 7.1).
Similarly, lift digital outputs are congured to perform the most common functions needed to realize a standard application, such as run and brake contactor control logic.
In AGL50-EV drives, commands are always coming from Lift Control Word. It is possible to issue the Run Fwd or Run
Rev commands from keypad, in order to simplify the startup procedure.
Frequency references are coming from the multi-speed selector, which is the required setting for most applications.
However, it is possible to use other sources for the frequency reference, such as analog inputs or Motopotentiometer.
Ramps are initialized to a standard set of jerks and acceleration/deceleration that should meet the requirements of most
low speed applications. It is possible, though not recommended, to disable the S-shape and use linear proles (F.250 =
0). In that case the jerk parameters will have no effect.
7.1 Command Logic
In the standard version, drive commands may come from several different sources (keypad, terminals, serial line etc.).
In the Lift version the parameter dening the source of the commands can only assume the following values:
P.000 Cmd source sel = “[0]CtrlWordOnly”
Command assignment
Drive command Source parameter Deafult setting Possible setting I PA
Setting Terminal
Enable src I.000 [2] DI 1 12 [0] False 100
[1] True
[2] DI 1
[3] DI 2
[4] DI 3
[5] DI 4
[6] DI 5
[7] DI 6
[8] DI 7
[9] DI 8
[10] DI Exp 1
[11] DI Exp 2
[12] DI Exp 3
[13] DI Exp 4
[14] AND 1
[15] AND 2
[16] AND 3
[17] OR 1
[18] OR 2
[19] OR 3
[20] NOT 1
[21] NOT 2
[22] NOT 3
[23] NOT 4
[24] FrqSel match
[25] Short Floor g
[26] Contactor (fw 03-07)
[27] Timer 1 (fw 03-07)
Run Fwd src I.001 [3] DI 2 14 See list of I.000 101
Run Rev src I.002 [4] DI 3 16 See list of I.000 102
Freq Sel 1 src I.003 [5] DI 4 18 See list of I.000 103
Freq Sel 2 src I.004 [6] DI 5 20 See list of I.000 104
Freq Sel 3 src I.005 [7] DI 6 22 See list of I.000 105
Freq Sel 4 src I.006 [0] False See list of I.000 106
Ramp Sel 1 src I.007 [25] Short Floor Flg See list of I.000 107
Ramp Sel 2 src I.008 [0] False See list of I.000 108
Ext fault src I.009 [0] False See list of I.000 109
Src Reset Allarm I.010 [0] Falso See list of I.000 110
Bak pwr act src I.011 [0] False See list of I.000 111
Forced stop src I.012 [0] False See list of I.000 185
Table 7.1 – Command assignment
24 AGL50-EV
Page 25

Each command may come from any of the drive digital input terminals (either standard or expanded), or can be a logical
combination of terminal inputs, obtained by using the drive internal programmable area
It is anyway possible to assign commands different from the default ones:
For example, if we want the Enable command to come from the digital input 3 of the drive (terminal 16 on the regulation
board), we have to set parameter I.000 Enable src to the value “[4] DI 3”.
Note:
If the source of a command is specied as an expanded DI, and the I/O expansion board is not mounted, the
command will always be inactive (FALSE).
A brief description of each command follows.
Enable src The Enable command must always be present, in order to activate the inverter output bridge. If the
Enable input is not present, or the Enable signal is removed at any time during the Lift sequence,
the output stage of the drive is disabled, and the Run contactor is open, regardless of the status of
all the other inputs.
Run Fwd src (Upward command)
Closing the input 14, the upward Lift sequence is started (see Figure 7.1).
Run Rev src (Downward command)
Closing the input 16, the downward Lift sequence is started (see Figure 7.1).
Note:
Note:
The direction of the motion can also be reversed by setting a negative frequency reference. With a negative
frequency reference, the Run Fwd src command will cause a downward motion, while a Run Rev src command will cause the cabin to move upward.
The lifting sequence will not start if both Run Fwd src and Run Rev src commands are activated at the same
time.
Freq Sel 1 ... 4 src (Selection of the speed reference)
The binary code dened by the status of these signals selects the frequency reference (speed) for
the ramp generator (see Fig.7.2), according to the following table:
Freq Sel 4 Freq Sel 3 Freq Sel 2 Freq Sel 1 Code Active frequency reference
Terminal XX Terminal 22 Terminal 20 Terminal 18
0 0 0 0 0 S.200 Rif frequenza 0
0 0 0 1 1 S.201 Rif frequenza 1
0 0 1 0 2 S.202 Rif frequenza 2
0 0 1 1 3 S.203 Rif frequenza 3
0 1 0 0 4 S.204 Rif frequenza 4
0 1 0 1 5 S.205 Rif frequenza 5
0 1 1 0 6 S.206 Rif frequenza 6
0 1 1 1 7 S.207 Rif frequenza 7
1 0 0 0 8 F.108 Rif frequenza 8
1 0 0 1 9 F.109 Rif frequenza 9
1 0 1 0 10 F.110 Rif frequenza 10
1 0 1 1 11 F.111 Rif frequenza 11
1 1 0 0 12 F.112 Rif frequenza 12
1 1 0 1 13 F.113 Rif frequenza 13
1 1 1 0 14 F.114 Rif frequenza 14
1 1 1 1 15 F.115 Rif frequenza 15
(Emergency run freq)
Table 7.2 – Multi-frequencies selection
Note:
The last multi-frequency has also a special meaning when using the backup power supply. If the drive is
being fed by the backup power supply, the frequency reference is clamped to the value dened by the parameter F.115.
If the backup power supply is not used, F.115 can be used as one of the multi-frequencies and is selected by
setting to TRUE all the selectors (Freq Sel 1 to Freq Sel 4).
AGL50-EV 25
Page 26

Ramp Sel 1 ... 2 The binary code dened by the status of these signals selects the set of parameters for ramp pro-
le (jerks, acceleration and deceleration). By default, the rst ramp selector is commanded by the
ShortFloorFl (see chapter 7.3), while the second ramp selector is xed to FALSE. Therefore, the rst
ramp set is normally active, and the drive will automatically switch to the second ramp set whenever
a short oor is detected (see Fig.7.5).
External fault Activation of this command, will cause the drive to trip with an external fault alarm. If the alarm oc-
curs while a lift sequence is in process, the sequence is immediately aborted and the Run contactor
is open. In order to restore drive operation, an explicit Alarm Reset command is needed.
Fault reset src (Alarm reset) Activation of this command will restore drive operation after a trip.
Bak pwr act src This command tells to the drive that a backup power supply is being used. See chapter 9 for a de-
tailed description.
In order to simplify the drive startup, it is possible to issue Run Fwd src or Run Rev src commands from the “I-O” keys
of the drive keypad.
Typical example:
The user wants to execute tuning of the motor resistance, but does not want to issue the start sequence from the external
PLC. In this case, it is possible to program the drive as follows:
- Set parameter P.000 Cmd source sel = “[1] CtlWrd & kpd”
- Set parameter I.000 Enable src = “[1] True”
- Set parameter I.001 RunFwd src = “[1] True”
- Issue the command for tuning, by setting C.100 Measure stator R = [1]; the drive keypad will show the message
“tune”.
- Press the “I” key; the keypad will show the message “run”, meaning that the tuning procedure is in progress. Wait
until the procedure ends, and the keypad will show the message “done”.
Nota:
The motor output contacts must be closed during the tuning procedure, in order to allow current to ow into
the motor. Either hard-wire the RUN contactor closed during tuning procedure, or connect the dedicated
output of the drive to the RUN contactor.
- Once the tuning procedure is nished, restore the original settings for the parameters above, following the order:
I.001 Run Fwd src = “[3] DI 2”
I.000 Enable src = “[2] DI 1”
P.000 Cmd source sel = “[0] CtrlWordOnly”
26 AGL50-EV
Page 27

K1MK2MK3M
C
D
BR1
U1/L1
W1/L3
V1/L2
K1M
PE1
3 Ph
AC
mains
U2/T1
W2/T3
V2/T2
PE2
K2M K3M
L1F1
3 Ph
Motor
+
K3MK2M
-
FR
FR(R)
L02
L01
Enable
Safety contacts
Run Fwd src
Run Rev src
Freq Sel 1 src
Regulation Board
Brake cont
Power Board
Brake
Brake cont
Braking resistor
12
14
16
18
20
Src Sel Freq 2
22
Src Sel Freq 3
28
25
27
RO 2
Motor not in Alarm
21
23
RO 1
DI 1
DI 2
DI 3
DI 4
DI 5
+24Vdc
DI 3
DI 6
11
13
DO 1 (NPN)
Contactor
+24V (terminal 28)
0V (terminal 26)
Load
11
13
DO 1 (PNP)
+24V 28)(terminal
0V (terminal 26)
Load
Contactor
24
024V26
COM-DI
Note!
Fig.7.1 – Lift standard wiring
The connections indicated for command inputs represent the most common solution for an PNP typecommand.
Digital I/Os with internal supply.
AGL50-EV 27
Page 28

7.2 Lift Sequence
I.000 Enable
I.001 Run Fwd
XOR
I.002 Run Rev
I.003 ... I.006
Freq Sel 1...4
10
D.007 Actual
speed
(Motor speed)
D.002 Output
current
(Inverter)
[51] Run
contactor
(*)
[45] DCbraking
(Motor)
(*)
[55] Lift
start (*)
(*): See 7.2.1
1 2 3 4 5 6 7
[54] Brake
contactor
(*)
Timing diagrams of the lift sequence are reported in Fig. 7.2 and Fig. 7.3.
Fig. 7.2 – Standard lift sequence
1. S.250 Cont close delay (Default : 0,20)
2. S.251 Magnet time (Default : 1)
3. S.252 Brake open delay (Default : 0,20)
4. S.253 Smooth start dly (Default : 0)
5. S.254 DCBrake stp time (Default : 1)
6. S.255 Brake close dly (Default : 0,20)
7. S.256 Cont open delay (Default : 0,20)
Note:
Lift sequence will not start if there is no current owing on any of the motor windings during the initial injection
of DC-current. The minimum amount of current necessary to release the mechanical brake and initiate the lift
sequence is dened by A.087 Current pres thr. By setting the parameter to “0”, current check is disabled,
and the lift sequence will start even if the motor is disconnected from the drive.
28 AGL50-EV
Page 29

10
Acceleration
5 6 7
a
b
b
a
P.440 Freq Thr1
S.201 Freq Ref1(F.101)
S.200Freq Ref0 (F.100)
Deceleration (**)
Jerk dec ini (**)
Jerk dec end (**)
Jerk dec end (**)
Jerk dec ini (**)
Deceleration (**)
I.000 Enable
I.001 Run Fwd
XOR
I.002 Run Rev
I.003 ... I.006
Freq Sel 1...4
D.007 Actual
speed
(Motor speed)
[51] Run
contactor
(*)
[45] DCbraking
(Motor)
(*)
[55] Lift
start (*)
(*): See 7.2.1
(**) S.230 ... S.245
[54] Brake
contactor
(*)
Fig. 7.3 – Detailed stopping sequence
a) S.260 Lift Stop Mode = [0] DC brake at stop
b) S.260 Lift Stop Mode = [1] Normal stop (Default)
7.2.1 Lift-dedicated digital output functions
Several specic functions can be programmed on the drive digital outputs, in order to check the correctness of the lift
sequence and to improve the interaction with the external sequencer. Here follows a list of the functions that can be
useful in lift applications.
DO Programming code Function description
[0] Drive ready TRUE when the drive is ready to accept a valid RUN command. Meaning that the drive
[1] Alarm state TRUE when the drive is in alarm status. Alarm reset is needed to restore operation
[2] Not in alarm TRUE when the drive is not in Alarm status.
[3] Motor run TRUE when the inverter output bridge is enabled and operating.
[4] Motor stop TRUE when the inverter output bridge is not operating (all six switches are open).
[5] Rev rotation TRUE when the motor is rotating counter-clockwise.
[31] Freq > thr1 TRUE when the motor speed (measured or estimated) is above the threshold dened
[32] Freq < thr1 TRUE when the motor speed (measured or estimated) is below the threshold dened by
[45] DC braking TRUE when DC injection is in progress.
AGL50-EV 29
is not in alarm, the dc-link pre-charge is completed and the safe-start interlock logic is
cleared.
by parameters P.440 and P.441.
parameters P.440 and P.441. This function is normally used to detect zero speed (see
sequence in Fig.7.2).
Page 30

[51] Contactor TRUE when the Run contactor has to be closed, either for upward or downward motion.
[52] Contactor UP TRUE when the Run contactor for upward motion has to be closed.
[53] Contactor DOWN TRUE when the Run contactor for downward motion has to be closed.
[54] Brake cont TRUE when the mechanical brake has to be released.
[55] Lift start TRUE when the inverter output bridge is operating and no DC injection is being operated.
[78] Timer 1 out TRUE when the Timer function output is 1.
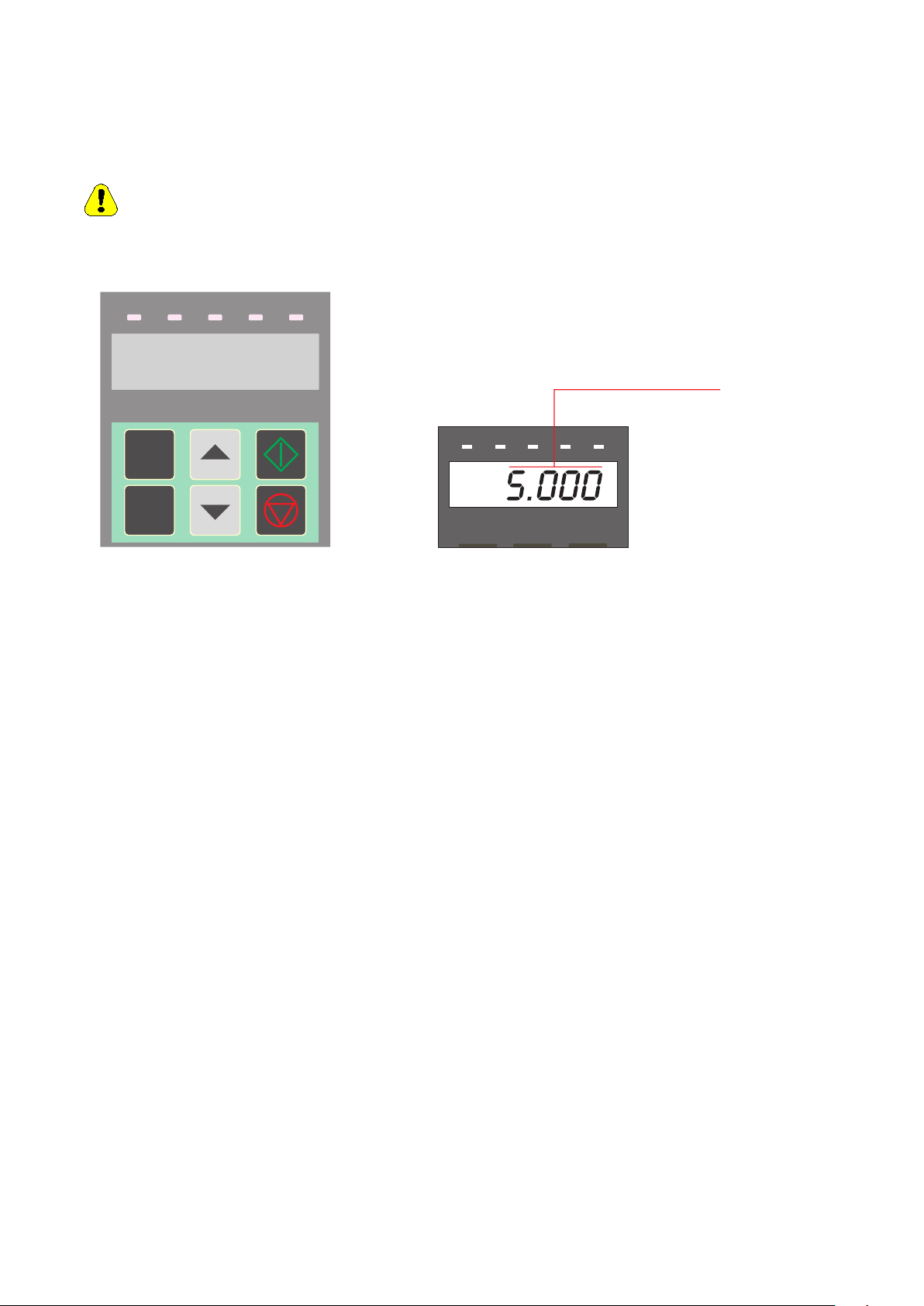
7.2.2 Speed indication
At power-on the drive keypad shows the speed of the lift car (parameter d.007), expressed in mm/s. Likewise, all the
variables related to the speed of the motor (d.008, d.302) are expressed in mm/s. The conversion between electrical Hz
and car speed is automatically performed by the drive, as explained in the following chapter. The conversion ratio can
also be overwritten by the user, by setting parameter P.600.
The parameter to be shown at power-on can be congured by setting the parameter P.580.
7.3 Ramp Function
Four independent jerks are available for each prole, together with linear acceleration and deceleration times. All prole
parameters are expressed in terms of car linear quantities. The equivalence between car speed v(m/s) and inverter output
frequency f(Hz) is automatically performed by the drive, based on the value of the following parameters:
- fb: S.101 Base frequency (Hz)
- vN: S.180 Car max speed (m/s)
The ramp prole is shown in Fig.6. Prole number 1 has been used as an example, but the same applies to all the four
available proles. The increase or decrease of the jerk values causes the increase or decrease of the running comfort.
Motor speed
D.007 Output speed
S.231-Acceleration 1
S.230-Jerk acc ini 1
Acceleration
S.232-Jerk acc end 1
S.233-Jerk dec ini 1 S.235-Jerk dec end 1
S.234-Deceleration 1
Fig.7.4 – Lift ramp prole
7.3.1 Space calculation and acceleration / deceleration ramps settings
The space covered by the lift car during acceleration and deceleration ramps can be calculated off-line by the drive, by
executing the command: C.060 Calculate space . The results of the calculation can be monitored into the parameters:
d.500 Lift space space covered by the lift car (expressed in meters) when accelerating from zero to the
maximum speed (dened by S.180) and then immediately decelerating back to zero(one
oor travel)
d.501 Lift accel space space covered by the lift car (expressed in meters) when accelerating from zero to the
maximum speed (dened by S.180).
d.502 Lift decel space pace covered by the lift car (expressed in meters) when decelerating from the maximum
speed (dened by S.180) to zero.
Knowing the space needed to accelerate and decelerate the lift car with the ramp set in use, is useful to determine
whether the ramps are compatible with the position of the oor sensors before actually starting the drive. For example,
30 AGL50-EV
Page 31

if the deceleration ramp is too slow, as compared to the re-aligning distance, the lift car could stop after the oor level.
If acceleration and/or deceleration ramps are too fast, the drive may reach the output current limit. In this case, the drive
will automatically clamp the current to a safe value, with a resulting loss of output torque. If the drive remains in limit
condition for the time specied by the parameter P.181 - Clamp alm HldOff (default setting is 1 second), an alarm will
be issued (“LF - Limiter fault”) and the lift sequence will be aborted. It is strongly recommended not to operate the drive
in current limit, since the desired speed prole cannot be achieved in that case, resulting in undesired oscillations. If the
drive reaches the current limit during the acceleration or deceleration phases, it is advised to slow down the ramps, until
the limit condition is avoided.
7.3.2 Short Floor Function
Sometimes, the space between adjacent oors is not constant, and there is one oor that may be nearer to the next one.
That situation is normally referred as “Short Floor”. It could happen that due to the reduced distance, the lift is required
to decelerate to the leveling speed, when the acceleration ramp to normal speed is still in progress. This will lengthen
the approaching phase, unless countermeasures are taken.
The drive is able to detect a Short Floor, by looking at the sequence.
The ag “ShortFloorFl” is set if the deceleration command is given during the acceleration phase.
I.007 Ramp sel 1 src = “[25] ShortFloorFl”
The ag is reset when the stop command is given, or when the sequence is aborted.
“ShortFloorFl” is default used to control the short oor, using the second set of ramps.
The regulation of the parameters from S.240 to S. 245 allows to dene the area to be covered before reaching the oor.
In case of short oor, if the lift overcomes the oor it means that the lift speed was too high and it is therefore necessary to
increase the jerk values (parameters S.242, S.243, S.244). If the plant works for a too long time with a low speed before
reaching the oor, the jerk values have to be decreased (parameters S.242, S.243, S.244).
A typical short oor sequence is reported in Fig. 7.5 .
I.000 Enable
I.001 Run Fwd
XOR
I.002 Run Rev
I.003 ... I.006
Freq Sel 1...4
D.007 Actual
speed
(Motor speed)
I.007 Ramp sel1src =
[25] ShortfloorFl
10
High speed setpoint
Ramp set 2
Ramp set 1
Ramp set 1
Leveling speed
Smooth start speed
Fig. 7.5 – Short oor sequence
Ramp references: 1 S.240 Jerk acc ini 2 4 S.243 Jerk dec ini 2
2 S.241 Acceleration 2 5 S.244 Deceleration 2
3 S.242 Jerk acc end 2 6 S.245 Jerk dec end 2
AGL50-EV 31
Page 32

7.4 Startup Menu
Lift version has parameters that are organized with access levels, as follows:
Access level Accessible parameters
1 - Basic display parameters
- Command for save parameters
- P.998
2 (Default) - All level 1 parameters
- Startup parameters
- All commands
3 All parameters
The access level is set by the parameter P.998 Param access lev.
Note! .
In order to make drive installation easy, all the parameters needed for standard setup are gathered in the STARTUP
menu. This menu consists of links to parameters present in different drive menus. Therefore, making a change to any of
the parameters in Startup, is equivalent to make the same change to the linked parameter in another menu.
The list of parameters in Startup menu of the lift version follows:
Note!
Menu S - Startup
Code Display (Description) Def. Min. Max
S.000 Mains voltage (linked to P.020) 380 230 480
When using GFeXpress, congurator, all parameters are accessible, regardless of what is specied by parameter P.998.
(*) = Size dependent
(ALIAS): On STARTUP menu only. Parameter code of same parameter on other menu .
Nominal voltage (Vrms) of the AC input mains.
S.001 Mains frequency (linked to P.021) 50 50 60
Nominal frequency (Hz) of the AC input mains.
S.100 Base voltage (linked to P.061) 380 50 528
Maximum inverter output voltage (Vrms). It should be set to motor rated voltage, as shown on the nameplate.
S.101 Base frequency (linked to P.062) 50 25 500
Motor base frequency (Hz). It is the frequency at which the output voltage reaches the motor rated (data on motor nameplate).
S.150 Motor rated curr (linked to P.040) (*) (*) (*)
Motor rated current (Arms). It should be set according to motor nameplate.
S.151 Motor pole pairs (linked to P.041) 2 1 60
Number of pole pairs of the motor (data on motor nameplate).
S.152 Motor power fact (linked to P.042) (*) (*) (*)
Motor input power factor at rated current and rated voltage. It should be set according to nameplate.
S.153 Motor stator R (linked to P.043) (*) (*) (*)
Equivalent resistance of the motor stator windings (Ohm). This value is important for correct operation of the automatic boost,
and slip compensation functions. It should be set to half of the resistance measured between two of the motor input terminals,
with the third terminal open. If unknown, it can be automatically measured by the autotuning command (see S.170).
S.170 Measure stator R (linked to C.100) 0.50 0.01 5.00
The execution of this command allows the user to measure the equivalent stator resistance of the motor in use. After the
command is issued, it is necessary to initiate a standard run sequence, by giving enable and start commands. The inverter
will close the run contactor, but will not release the brake, allowing for current to ow in the windings. After the procedure is
successfully completed, the value of S.153 is automatically updated.
32 AGL50-EV
Page 33

S.180 Car max speed (linked to A.090) 0.50 0.01 5.00
Speed of the lift car (m/s) when the inverter outputs the rated frequency.
S.200 Frequency ref 0 (linked to F.100) 10.0 -F.020 F.020
See description of S.207.
S.201 Frequency ref 1 (linked to F.101) 50.0 -F.020 F.020
See description of S.207.
S.202 Frequency ref 2 (linked to F.102)
S.203 Frequency ref 3 (linked to F.103)
S.204 Frequency ref 4 (linked to F.104)
S.205 Frequency ref 5 (linked to F.105)
S.206 Frequency ref 6 (linked to F.106)
S.207 Frequency ref 7 (linked to F.107) 0.0 -F.020 F.020
Frequency references (Hz) of the inverter. The selection of any of the above references is performed by the dedicated
selectors (Freq Sel 0 to 4). Although only 8 references are present in the startup menu, it is possible to use up to 16 different
references, available in the menu F.
S.220 Smooth start frq (linked to F.116) 2.0 -F.020 F.020
Frequency reference (Hz) used during the smooth start procedure.
S.225 Ramp factor 1 (linked to A.091) 1.00 0.01 2.50
Ramp accel/decel and jerks are dened by the parameters described below. However, for an easy setting, it is possible to
use a common extension factor to speed-up or slow down the ramps. For example, if S.225 is set to 0.5, all the parameters
related to the sets 1 and 3 of ramps (accels, decels and jerks) are halved, resulting in slower ramps.
S.226 Ramp factor 2 (linked to A.092) 1.00 0.01 2.50
Same as S.225, but it applies to the ramp sets 2 and 4.
S.230 Jerk acc ini 1 (linked to F.251) 0.50 0.01 10.00
Jerk (m/s3) applied at the beginning of an acceleration with ramp set 1 (Ramp set 1 is the one used by default, during normal
operation).
S.231 Acceleration 1 (linked to F.201) 0.60 0.01 5.00
Linear acceleration (m/s2) with ramp set 1.
S.232 Jerk acc end 1 (linked to F.252) 1.40 0.01 10.00
Jerk (m/s3) applied at the end of an acceleration with ramp set 1.
S.233 Jerk dec ini 1 (linked to F.253) 1.40 0.01 10.00
Jerk (m/s3) applied at the beginning of a deceleration with ramp set 1.
S.234 Deceleration 1 (linked to F.202) 0.60 0.01 5.00
Linear deceleration (m/s2) with ramp set 1.
S.235 Jerk dec end 1 (linked to F.254) 1.00 0.01 10.00
Jerk (m/s3) applied at the beginning of a deceleration with ramp set 1.
S.240 Jerk acc ini 2 (linked to F.255) 0.50 0.01 10.00
Jerk (m/s3) applied at the beginning of an acceleration with ramp set 2 (Ramp set 2 is the one used by default when a short
oor is detected).
S.241 Acceleration 2 (linked to F.203) 0.60 0.01 5.00
Linear acceleration (m/s2) with ramp set 2.
S.242 Jerk acc end 2 (linked to F.256) 1.40 0.01 10.00
Jerk (m/s3) applied at the beginning of a deceleration with ramp set 2.
S.243 Jerk dec ini 2 (linked to F.257) 1.40 0.01 10.00
Jerk (m/s3) applied at the beginning of a deceleration with ramp set 2.
S.244 Deceleration 2 (linked to F.204) 0.60 0.01 5.00
AGL50-EV 33
Page 34

Linear deceleration (m/s2) with ramp set 2.
S.245 Jerk dec end 2 (linked to F.258) 1.00 0.01 10.00
Jerk (m/s3) applied at the beginning of a deceleration with ramp set 2.
S.250 Cont close delay (linked to A.080) 0.20 0.00 10.00
Delay time (s) for safe closing or the run contactor.
S.251 Magnet time (linked to A.081) 1.00 0.00 10.00
Duration (s) of the initial magnetization of the motor with DC injection.
S.252 Brake open delay (linked to A.082) 0.20 0.00 10.00
Delay time (s) between the open command and effective opening of the mechanical brake.
S.253 Smooth start dly (linked to A.083) 0.00 0.00 10.00
Duration (s) of the smooth start phase.
S.254 DCBrake stp time (linked to A.084) 1.00 0.00 10.00
Duration (s) of the stopping phase, after the speed has fallen below the zero threshold (dened by parameter P.440). During
this phase, the inverter can either output a DC current, or maintain a low frequency, in order to compensate for the slip
(default), as programmed by S.260.
S.255 Brake close dly (linked to A.085) 0.20 0.00 10.00
Delay time (s) between the close command and the effective engagement of the mechanical brake.
S.256 Cont open delay (linked to A.086) 0.20 0.00 10.00
Delay time (s) between the open command and the affective opening of the run contactor.
S.260 Lift stop mode (linked to A.220) [1] Normal stop
After the car speed falls below the zero threshold (dened by P.440), the inverter can be programmed to brake with DC
injection (S.260 = 0), or to maintain a low frequency output in order to compensate for the estimated slip (S.260 = 1). The
latter is set by default.
Possible selections: [0] DC brake at stop
[1] Normal stop
S.300 Manual boost [%] (linked to P.120) 3.0 0.0 25.0
Voltage boost (% of motor rated voltage) applied at low frequency in order to maintain the machine ux.
S.301 Auto boost en (linked to P.122) [0] Disable
The automatic boost allows for precise compensation of the resistive voltage drop due to the winding resistance, keeping the
ux at its rated value regardless of the load level and output frequency. For correct operation of this function, a precise value
of the equivalent stator resistance is needed.
Possible selections: [0] Disable
[1] Enable
S.310 Slip compensat (linked to P.100) 50 0 250
Amount of slip compensation (% of rated slip, calculated from nameplates) during motoring (power ows from motor to load).
S.311 Slip comp regen (linked to P.102) 50 0 250
Amount of slip compensation (% of rated slip, calculated from nameplates) during regeneration (power ows back from load
to motor).
S.312 Slip comp lter (linked to P.101) 0.3 0.0 10.0
Time constant (s) of the lter used for slip compensation. The lower this value, the faster the compensation, with improved
speed control. Excessively fast slip compensation may cause unwanted oscillations.
S.320 DC braking level (linked to P.300) 75 0 100
Amount of current (% of drive rated current) injected during magnetization and stopping phases.
S.400 Control mode (linked to P.010) [0] V/f OpenLoop
Set this parameter to “[0] Open loop V/f” when there is no encoder feedback available.
Set to “[1] Closed loop V/f” otherwise.
Possible selections: [0] V/f OpenLoop
[1] V/f ClsdLoop
34 AGL50-EV
Page 35

S.401 Encoder ppr (linked to I.501) 1024 1 9999
Resolution of the encoder in use, expressed in number of pulses per mechanical revolution (ppr). It is a nameplate data of
the encoder.
S.450 Spd ctrl P-gainH (linked to P.172) 2.0 0.0 100.0
Proportional gain of speed PI regulator.
S.451 Spd ctrl I-gainH (linked to P.173) 1.0 0.0 100.0
Integral gain of speed PI regulator.
S.452 Spd PI High lim (linked to P.176) 10.0 0.0 100.0
Maximum allowed output of the speed PI regulator (% of maximum frequency, F.020). It represents the maximum amount of
slip that is allowed during motoring operation.
S.453 Spd PI Low lim (linked to P.177) -10.0 -100.0 0.0
Minimum allowed output of the speed PI regulator (% of maximum frequency, F.020). It represents the maximum amount of
slip (negative) that is allowed during braking operation.
Note!
S.901 Save parameters (linked to C.000)
It is possible to congure gain scheduling for the speed PI regulator.
The execution of this command will save all the parameters into the permanent memory of the drive. All unsaved settings will
be lost if the power is cycled.
AGL50-EV 35
Page 36

7.5 Menù Display
d.000 Output frequency Drive output frequency Hz 0.01 001
d.001 Frequency ref Drive frequency reference Hz 0.01 002
d.002 Output current Drive output current (rms) A 0.1 003
d.003 Output voltage Drive output voltage (rms) V 1 004
d.004 DC link voltage DC Bus drive voltage (DC) V 1 005
d.005 Power factor Power factor 0.01 006
d.006 Power [kW] Inverter output power kW 0.01 007
d.007 Output speed Drive output speed mm/s 1 008
d.008 Speed ref Drive speed reference (d.001)*(P.600) mm/s 1 009
d.050 Heatsink temp Drive heatsink temperature (linear sensor measured) °C 1 010
d.051 Drive OL Drive overload (100% = alarm threshold) % 0.1 011
d.052 Motor OL Motor overload (100% = alarm threshold) % 0.1 012
d.053 Brake res OL Braking resistor overload (100%=alarm thr) % 0.1 013
d.100 Dig inp status Digital inputs status acquired by the drive (terminal or virtual) 014
d.101 Term inp status Digital inputs terminal status of the drive regulat. Board 015
d.102 Vir dig inp stat Virtual digital inputs status from drive serial link 016
d.120 Exp dig inp stat Expansion digital inputs status (optional terminal or virtual) 017
d.121 Exp term inp Expansion digital inputs terminal status of the drive expansion board 018
d.122 Vir exp dig inp Expansion virtual digital inputs status from drive serial link 019
d.150 Dig out status Digital outputs status on the terminals of the drive regulation board 020
(commanded by DO functions or virtual DO)
d.151 Drv dig out sta Digital outputs status, commanded by DO functions 021
d.152 Vir dig out sta Virtual digital outputs status, commanded via serial link 022
d.170 Exp dig out sta Expansion digital outputs status on the terminals of the drive regulation board 023
(commanded by DO functions or virtual DO)
d.171 Exp DrvDigOutSta Expansion digital outputs status, commanded by DO functions 024
d.172 Exp VirDigOutSta Expansion virtual digital outputs status 025
(commanded via serial link)
d.200 An in 1 cnf mon Analog input 1 destination; 026
it shows the function associated to this analog input
[0] Null funct
[1] Rif freq 1
[2] Rif freq 2
[3] Fatt liv Bst
[4] Fatt liv OT
[5] FattLiv Vred
[6] Fatt liv DCB
[7] FattEst Ramp
[8] FattRif freq
[9] VelPI LimFac
[10] MltFrq ch 1
[11] MltFrq ch 2
d.201 An in 1 monitor Analog input 1 output block % value 027
d.202 An in 1 term mon Analog input 1 input block % value 028
d.210 Reserved 029
d.211 Reserved 030
d.212 Reserved 031
36 AGL50-EV
Page 37

d.220 Reserved 032
d.221 Reserved 033
d.222 Reserved 034
d.250 LCW To PLC (0-7) Monitor of the control bits sent to the internal sequencer. Bit 0 to 7 66
d.251 LCW To PLC(8-15) Monitor of the control bits sent to the internal sequencer. Bit 8 to 15 67
d.252 LCW Fr PLC (0-7) Monitor of the control bits generated by the internal sequencer. Bit 0 to 7 68
d.253 LCW Fr PLC(8-15) Monitor of the control bits generated by the internal sequencer. Bit 8 to 15 69
d.254 LCW FrPLC(16-23) Monitor of the control bits generated by the internal sequencer. Bit 16 to 23 70
d.255 LSW (0-7) Monitor of the drive status. Bit 0 to 7. 71
d.300 EncPulses/Sample Number of encoder pulses, 1/100 035
recorded in the time interval dened by parameter I.504.
d.301 Encoder freq Encoder frequency reading (Motor frequency) Hz 0.01 036
d.302 Encoder speed Encoder speed reading (d.000)*(P.600) 0.01/1 037
d.350 Reserved
d.351 Reserved
d.353 Reserved
d.354 Reserved
d.400 PID reference PID reference signal % 0.1 041
d.401 PID feedback PID feedback signal % 0.1 042
d.402 PID error PID error signal % 0.1 043
d.403 PID integr comp PID integral component % 0.1 044
d.404 PID output PID output signal % 0.1 045
d.450 Mdplc error Status of internal sequencer 62
0 No error
1 Internal sequencer error
d.500 Lift space m 0.01 63
Space needed to accelerate the car from zero to max speed and then decelerate back to zero
d.501 Lift space
Space needed to accelerate the car from zero to max speed
d.502 Lift space m 0.01 65
Space needed to decelerate the car from max speed to zero
d.800 1st alarm-latest Last alarm stored by the drive alarm list 046
See par. 10.3
d.801 2nd alarm Second to last alarm 047
d.802 3rd alarm Third to last alarm 048
d.803 4th alarm Fourth to last alarm 049
d.950 Drive rated curr Drive rated current (it depends on the drive size) 0.1 050
d.951 SW version (1/2) Software version - part 1 (03.01) 0.01 051
d.952 SW version (2/2) Software version - part 2 (00.00) 0.01 052
d.957 Drive size Drive size code 057
7 4kW - 400/460V
8 5.5kW - 400/460V
9 7.5kW - 400/460V
d.958 Drive cfg type Drive conguration type 061
[0]Standard: 400Vac, 50Hz
[1] American: 460Vac, 60Hz
d.999 Display Test Drive display test
AGL50-EV 37
Page 38

7.6 Timer 1 function (from fw 03.07)
Timer 1
Timer1out
Timer1set src
Timer 1 mode
Timer1delay
Off
On delay
Off delay
On/Off delay
Pulse
Sym flasher
On delay
T=Timer 1 delay
Off delay
T=Timer 1 delay
The timer function allows to apply delays and pulses to an input signal selected from a pick list.
Menu A - APPLICATION
Cod. Display (Description) Def. Min. Max
A.320 Timer 1 mode 0 0 5
Select working mode of Timer 1
[0] Disable
[1] On delay
[2] Off delay
[3] On/Off delay
[4] Pulse
[5] Sym asher
[0] Disable Output is always 0ff
Timer 1in
Timer 1 out
Tt<T
Timer 1in
Timer 1 out
T T
T
[1] On delay The closure of the Input (On) is transferred on Output after pre-set time has elapsed.
[2] Off delay The closure of the Input (On) is transferred immediately on the Output.
The opening of the Input (Off) initiates the pre-set delay, after which the Output is reset (Off).
38 AGL50-EV
Page 39

Timer1in
On/Off delay
T=Timer1delay
Pulse
T=Timer1delay
T=Timer 1 delay
T
T
Timer 1in
Timer1out
T T
T
T
Timer 1 out
Tt<T
[3] On/Off delay The closure of the Input (On) is transferred on Output after pre-set time has elapsed.
The opening of the Input (Off) initiates the pre-set delay, after which the Output is reset (Off).
[4] Pulse The closure of the Input (On) is transferred immediately on the Output.
After pre-set time has elapsed, the Output reset (Off).
Symmetrical flasher
Timer 1in
Timer 1 out
TTT TTTt<T
[5] Sym asher The closure of the Input (On) is transferred immediately on the Output.
The Output cycle between On and Off for as long as Input is close (On).
The ratio is 1:1 (time On = time Off)
A.321 Timer 1 set src 0 0 27
Select input signal of Timer 1. See list of I.000
A.322 Timer 1 delay 3.00 0.00 30.00
Set delay of Timer 1. See list of I.000
Example of Timer 1 use:
The default conguration of I.100 “Dig output 1 cfg” is [51] “Contactor”.
For the needs of external sequences is necessary to delay of 3 sec the rising edge.
You can get this behaviour with the Timer 1.
The necessary congurations are:
A.320 Timer 1 mode = [1] On delay
A.321 Timer 1 set src = [26] Contactor
A.322 Timer 1 delay = 3.0 sec
I.100 Dig output 1 cfg = [78] Timer 1 out
AGL50-EV 39
Page 40

8 - Troubleshooting
Limit
Alarm
Prg
Rev Run
0U
Alarm code blinkng
Alarm condition Alarm resetted
Blinking
8.1 Drive Alarm Condition
The drive keypad will show a blinking message with code and name of the alarm occurred.
The gure below shows an example of OV Overvoltage alarm condition.
Figure 8.1.1: Alarm Displaying
The active alarm can be acknowledged by pressing the Prg button on the keypad.
This operation will allow menu navigation and parameter editing while the drive is in alarm state (red LEDs blinking).
In order to resume drive operation, an Alarm reset command is necessary.
8.2 Alarm Reset
Alarm reset can be performed in three different ways:
- Alarm reset by keypad: pressing simultaneously Up and Down keys; the reset
action will take effect when the buttons are released.
- Alarm reset by digital input: it can be performed through a programmable digital
input connected to command I.010 Fault reset src =
[6] Digital input 5.
. Alarm reset by Autoreset function: it allows an automatic reset of some drive alarms (see
table 8.3.1), by the settings of P.380, P.381, P.382 and
P.383 parameters.
The gure below shows how to reset an alarm by keypad.
Figure 8.2.1: Alarm Reset
40 AGL50-EV
Page 41

8.3 List of drive alarm events
Table 8.3.1 provides a description of the causes for all the possible alarms.
Table 8.3.1 Alarm event list
ALARM
DESCRIPTION
Cod. Name
EF EF Ext Fault It trips when External fault input is active 1 YES 0
OC OC OverCurrent It trips when an Overcurrent value is detected by output current sensor 2 YES 1
serial
code from
Numerical
Autoreset
H.063
Bit H.062
OU OV OverVoltage
UU UV UnderVoltage
OH OH OverTemperat
OLi OLi Drive OL It trips when the drive overload accumulator exceeded the trip threshold 6 NO 5
OLM OLM Motor OL It trips when the motor overload accumulator exceeded the trip threshold 7 NO 6
OLr OLr Brake res OL
Ot Ot Inst OverTrq
PH PH Phase loss
FU FU Fuse Blown It trips when the drive input fuses are blown 11 NO 10
OCH OCH Desat Alarm IGBT desaturation or instantaneous overcurrent have been detected 12 YES 11
St St Serial TO It trips when the serial link time out exceeds the programmed level (I.604 parameter) 13 YES 12
OP1 Reserved 14 NO 13
OP2
It trips when the drive DC Bus voltage is higher than the maximun threshold for the
given main voltage setting
It trips when the drive DC Bus voltage is lower than the maximun threshold for the
given main voltage setting
It trips when the drive heatsink temperature detected by the switch sensor exceeds its
threshold (*)
Its intervention occurs when the overload cycle of the external braking resistance
does not correspond to the dened limits.
It trips when the torque delivered by the motor exceeds the programmed level for the
preset time
It trips when the supply phase lack: enabled 30 seconds after one of the supply
phases has been disconnected
Reserved
3 YES 2
4 YES 3
5 NO 4
8 NO 7
9 NO 8
10 NO 9
15 NO 14
bF bF Bus Fault Drive comunication Bus failure 16 NO 15
OHS OHS OverTemperat It trips when the drive heatsink temperature exceeds a safety level. (*) 17 NO 16
SHC SHC Short Circ Short Circuit between output phases or Ground fault 18 NO 17
Ohr Riservato 19 18
Lf LF Limiter fault
PLC PLC Plc fault
EMS Key Em Stp fault Reserved 22 NO 21
UHS UHS Under Temperat
PHO Phase Loss Output
It trips when the output current limiter or the DC-Link voltage limiter fail. The failure
can be caused by wrong settings of regulator gains or by the motor load.
"PLC program not active. Lift application does not function.
Run C.050 parameter to reset the alarm."
It trips when the temperature of the drive heatsink is below a safety level (typically
–10°C).
See gure 7.2: it trips during the phase (2) if the current does not exceed the limit
dened
20 NO 19
21 NO 20
23 NO 22
25 NO 24
*) OH switch sensor threshold and OHS analog sensor threshold depend on the drive size (75 °C ... 85 °C)
AGL50-EV 41
Page 42

9 - Parameter list
Figure 9.1: Parameters Description Legend
Code
(A)
Name
(B)
PARAMETER PICK LIST
DESCRIPTION Selection
(C)
Description
Def.
(D)
Min
(E)
Max
(F)
Unit
(G)
Variat.
(H)
IPA
(I)
START-UP
S.000 Mains voltage Rated value of the line voltage 230 400 230 480 V
380
400
420
440
460
480
S.001 Mains frequency Rated value of the line frequency 50 50 50 60 Hz
60
404
(P.020)
405
(P.021)
(A) CODE: Parameter Code, showed on display.
Format=X.YYY:
X=Menu d=DISPLAY S=STARTUP I=INTERFACE F=FREQ & RAMPS
P=PARAMETER A=APPLICATION C=COMMAND H=HIDDEN
YYY = Parameter number
(B) Parameter name
(C) Selection list, code [IN BRAKET]
(D) Parameter default value
(E) Parameter minimum value
(F) Parameter maximum value
G) Parameter unit of measure
(H) Parameter step of variation
(I) Parameter sw number, used via serial
If IPA bold= not writable parameter with running motor
Note!
(ALIAS): On STARTUP menu only.
Parameter code of same parameter on other menu .
(*): Parameter value depends on the drive size.
42 AGL50-EV
Page 43

Code
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Def. Min Max Unit Variat. IPA
DISPLAY
d.000 Output frequency Drive output frequency Hz 0.01 001
d.001 Frequency ref Drive frequency reference Hz 0.01 002
d.002 Output current Drive output current (rms) A 0.1 003
d.003 Output voltage Drive output voltage (rms) V 1 004
d.004 DC link voltage DC Bus drive voltage (DC) V 1 005
d.005 Power factor Power factor 0.01 006
d.006 Power [kW] Inverter output power kW 0.01 007
d.007 Output speed Drive output speed mm/s 1 008
d.008 Speed ref Drive speed reference (d.001)*(P.600) mm/s 1 009
d.050 Heatsink temp
d.051 Drive OL Drive overload (100% = alarm threshold) % 0.1 0 11
d.052 Motor OL Motor overload (100% = alarm threshold) % 0.1 012
d.053 Brake res OL
d.100 Dig inp status
d.101 Term inp status
d.102 Vir dig inp stat
d.120 Exp dig inp stat
d.121 Exp term inp
d.122 Vir exp dig inp
d.150 Dig out status
d.151 Drv dig out sta
d.152 Vir dig out sta
d.170 Exp dig out sta
d.171 Exp DrvDigOutSta
d.172 Exp VirDigOutSta
d.200 An in 1 cnf mon
d.201 An in 1 monitor Analog input 1 output block % value 027
d.202 An in 1 term mon Analog input 1 input block % value 028
Drive heatsink temperature (linear sensor
measured)
Braking resistor overload (100%=alarm
thr)
Digital inputs status acquired by the drive
(terminal or virtual)
Digital inputs terminal status of the drive
regulat. Board
Virtual digital inputs status from drive
serial link
Expansion digital inputs status (optional
terminal or virtual)
Expansion digital inputs terminal status of
the drive expansion board
Expansion virtual digital inputs status from
drive serial link
Digital outputs status on the terminals of
the drive regulation board (commanded by
DO functions or virtual DO)
Digital outputs status, commanded by DO
functions
Virtual digital outputs status, commanded
via serial link
Expansion digital outputs status on the
terminals of the drive regulation board
(commanded by DO functions or virtual
DO)
Expansion digital outputs status, commanded by DO functions
Expansion virtual digital outputs status,
commanded via serial link
Analog input 1 destination; it shows the
function associated to this analog input
°C 1 010
% 0.1 013
014
015
016
017
018
019
020
021
022
023
024
025
[0] Null funct 026
[1] Freq ref 1
[2] Freq ref 2
[3] Bst lev fact
[4] OT lev fact
[5] Vred lev fac
[6] DCB lev fact
[7] RampExt fact
[8] Freq Ref fact
[9] SpdPI LimFac
[10] MltFrq ch 1
[11] MltFrq ch 2
AGL50-EV 43
Page 44

Code
d.210 Reserved
d.211 Reserved
d.212 Reserved
d.220 Reserved
d.221 Reserved
d.222 Reserved
d.250 LCW To PLC (0-7)
d.251 LCW To PLC(8-15)
d.252 LCW Fr PLC (0-7)
d.253 LCW Fr PLC(8-15)
d.254 LCW FrPLC(16-24)
d.255 LSW (0-7) Monitor of the drive status. Bit 0 to 7 71
d.300 EncPulses/Sample
d.301 Encoder freq
d.302 Encoder speed Encoder speed reading (d.000)*(P.600) 0.01/1 037
d.350 Reserved
d.351 Reserved
d.353 Reserved
d.354 Reserved
d.400 PID reference PID reference signal % 0.1 041
d.401 PID feedback PID feedback signal % 0.1 042
d.402 PID error PID error signal % 0.1 043
d.403 PID integr comp PID integral component % 0.1 044
d.404 PID output PID output signal % 0.1 045
d.450 Mdplc error Status of internal sequencer 0 No error
d.500 Lift space
d.501 Lift accel space
d.502 Lift decel space
d.800 1st alarm-latest Last alarm stored by the drive alarm list See paragraph 9.3 046
d.801 2nd alarm Second to last alarm 047
d.802 3rd alarm Third to last alarm 048
d.803 4th alarm Fourth to last alarm 049
d.950 Drive rated curr
d.951 SW version (1/2) Software version - part 1 03.01 0.01 051
d.952 SW version (2/2) Software version - part 2 00.00 0.01 052
d.957 Drive size Drive size code 057
d.958 Drive cfg type Drive conguration type
d.999 Display Test Drive display test 099
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Monitor of the control bits sent to the
internal sequencer. Bit 0 to 7
Monitor of the control bits sent to the
internal sequencer. Bit 8 to 15
Monitor of the control bits generated by the
internal sequencer. Bit 0 to 7
Monitor of the control bits generated by the
internal sequencer. Bit 8 to 15
Monitor of the control bits generated by the
internal sequencer. Bit 16 to 24
Number of encoder pulses, recorded in the
time interval dened by parameter I.504.
Encoder frequency reading (Motor
frequency)
1 Internal sequencer error 62
Space needed to accelerate the car from
zero to max speed and then decelerate
back to zero
Space needed to accelerate the car from
zero to max speed
Space needed to decelerate the car from
max speed to zero
Drive rated current (it depends on the
drive size)
4 4kW - 230/400/460V
5 5.5kW - 230/400/460V
6 7.5kW - 230/400/460V
[0]Standard:400
[1]American:460
Standard: 400Vac, 50Hz
American: 460Vac, 60Hz
Def. Min Max Unit Variat. IPA
66
67
68
69
70
1/100 035
Hz 0.01 036
m 0.01 63
m 0.01 64
m 0.01 65
0.1 050
061
44 AGL50-EV
Page 45

Code
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Def. Min Max Unit Variat. IPA
START-UP
S.000 Mains voltage Rated value of the line voltage 230 400 230 480 V
380
400
420
440
460
480
S.001 Mains frequency Rated value of the line frequency 50 50 50 60 Hz
60
S.100 Base voltage Motor base (rated) voltage 380 50 528 V 1
S.101 Base frequency Rated frequency of the motor 50 25 250 Hz 0.1
S.150 Motor rated curr Rated current of the motor (*) (*) (*) A 0.1
S.151 Motor pole pairs Pole Pairs of the motor 2 1 60 0.01
S.152 Motor power fact Motor power factor (*) 0.01 1 0.01
S.153 Motor stator R
S.170 Measure stator R Motor Autotune command Off (1) (1) (2)
S.180 Car max speed
S.200 Frequency ref 0 Digital reference frequency 0 10.0 -F.020 F.020
S.201 Frequency ref 1 Digital reference frequency 1 50.0 -F.020 F.020
S.202 Frequency ref 2 Digital reference frequency 2 0 -F.020 F.020
S.203 Frequency ref 3 Digital reference frequency 3 0 -F.020 F.020
S.204 Frequency ref 4 Digital reference frequency 4 0 -F.020 F.020
S.205 Frequency ref 5 Digital reference frequency 5 0 -F.020 F.020
S.206 Frequency ref 6 Digital reference frequency 6 0 -F.020 F.020
S.207 Frequency ref 7 Digital reference frequency 7 0 -F.020 F.020
S.220 Smooth start frq Frequency reference during smooth start 2.0 -F.020 F.020
S.225 Ramp factor 1
S.226 Ramp factor 2
S.230 Jerk acc ini 1
S.231 Acceleration 1 Linear acceleration with ramp set 1 0.60 0.01 5.00 m/s2 0.01
S.232 Jerk acc end 1
S.233 Jerk dec ini 1
Measurement of the stator resistance of
the motor
Speed of the lift car when the inverter
output frequency is equal to S.101
Multiplier for acc/dec and jerks of ramp
sets 1 and 3
Multiplier for acc/dec and jerks of ramp
sets 2 and 4
Jerk applied at the beginning of an acceleration with ramp set 1
Jerk applied at the end of an acceleration
with ramp set 1
Jerk applied at the beginning of a deceleration with ramp set 1
(*) 0 99.99 ohm
do
0.50 0.01 5.00 m/s 0.01
1.00 0.01 2.50 0.01
1.00 0.01 2.50 0.01
0.50 0.01 10.00 m/s3 0.01
1.40 0.01 10.00 m/s3 0.01
1.40 0.01 10.00 m/s3 0.01
404
(P.020)
405
(P.021)
413
(P.061)
414
(P.062)
406
(P.040)
407
(P.041)
408
(P.042)
409
(P.043)
806
(C.100)
1323
(A.090)
311
(F.100)
312
(F.101)
313
(F.102)
314
(F.103)
315
(F.104)
316
(F.105)
317
(F.106)
318
(F.107)
327
(F.116)
1324
(A.091)
1327
(A.092)
343
(F.251)
329
(F.201)
344
(F.252)
345
(F.253)
AGL50-EV 45
Page 46

Code
S.234 Deceleration 1 Linear deceleration with ramp set 1 0.60 0.01 5.00 m/s2 0.01
S.235 Jerk dec end 1
S.240 Jerk acc ini 2
S.241 Acceleration 2 Linear acceleration with ramp set 2 0.60 0.01 5.00 m/s2 0.01
S.242 Jerk acc end 2
S.243 Jerk dec ini 2
S.244 Deceleration 2 Linear deceleration with ramp set 2 0.60 0.01 5.00 m/s2 0.01
S.245 Jerk dec end 2
S.250 Cont close delay RUN contactor close delay 0.20 0 10 s 0.01
S.251 Magnet time Motor magnetization time 1 0 10 s 0.01
S.252 Brake open delay Brake contactor open delay 0.20 0 10 s 0.01
S.253 Smooth start dly Smooth start duration 0 0 10 s 0.01
S.254 DCBrake stp time Duration of 0Hz braking at stop 1 0 10 s 0.01
S.255 Brake close dly Brake contactor close delay 0.20 0 10 s 0.01
S.256 Cont open delay RUN contactor open delay 0.20 0 10 s 0.01
S.260 Lift stop mode Lift behavior at stop [0] Dcb at stop
S.300 Manual boost [%] Manual boost at low revolutions 3.0 0.0 25.0
S.301 Auto boost en Automatic boost function enabling [0] Disable 0 0 1
S.310 Slip compensat
S.311 Slip comp regen
S.312 Slip comp lter Time constant of slip compensation 0.3 0 10 s 0.1
S.320 DC braking level
S.400 Control mode Drive control mode [0] V/f OpenLoop
S.401 Encoder ppr Pulses per revolution of the encoder in use 1024 1 9999 1
S.450 Spd ctrl P-gainL Speed loop Proportional gain 2.0 0 100 % 0.1
S.451 Spd ctrl I-gainL Speed loop Integral gain 1.0 0 100 % 0.1
S.452 Spd PI High lim Speed PI regulator output upper limit 10 0 100
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Jerk applied at the end of a deceleration
with ramp set 1
Jerk applied at the beginning of an acceleration with ramp set 2
Jerk applied at the end of an acceleration
with ramp set 2
Jerk applied at the beginning of a deceleration with ramp set 2
Jerk applied at the end of a deceleration
with ramp set 2
[1] Normal stop
[1] Enable
Amount of slip compensation during
motoring
Amount of slip compensation during
regeneration
Current level used during DC brake at start
and stop
[1] V/f ClsdLoop
DC brake is performed after the output
frequency is below P.440
threshold
DC brake is not performed at stop
Speed control without
encoder feedback
Speed control with
encoder feedback
Def. Min Max Unit Variat. IPA
1.00 0.01 10.00 m/s3 0.01
1.00 0.01 10.00 m/s3 0.01
1.40 0.01 10.00 m/s3 0.01
1.40 0.01 10.00 m/s3 0.01
1.00 0.01 10.00 m/s3 0.01
1 0 1
% of
0.1
S.100
50 0 250
50 0 250
75 0 100
0 0 1
% of
rated
slip
% of
rated
slip
% of
d.950
% of
F.020
0.1
330
(F.202)
346
(F.254)
347
(F.255)
331
(F.203)
348
(F.256)
349
(F.257)
332
(F.204)
350
(F.258)
1316
(A.080)
1317
(A.081)
1318
(A.082)
1319
(A.083)
1320
(A.084)
1321
(A.085)
1322
(A.086)
1350
(A.220)
421
(P.120)
423
(P.122)
419
1
(P.100)
500
1
(P.102)
420
(P.101)
449
1
(P.300)
498
(P.010)
151
(I.501)
503
(P.172)
504
(P.173)
509
(P.176)
46 AGL50-EV
Page 47

Code
S.453 Spd PI Low lim Speed PI regulator output lower limit -10 -100 0
S.901 Save parameters Save parameters off” off” off” (“do”)
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
do
Def. Min Max Unit Variat. IPA
INTERFACE
I.000 Enable src
Source of the Enable command of Lift
Control Word
[0] False
[1] True
[2] DI 1
[3] DI 2
[4] DI 3
[5] DI 4
[6] DI 5
[7] DI 6
[8] DI 7
[9] DI 8
[10] DI Exp 1
[11] DI Exp 2
[12] DI Exp 3
[13] DI Exp 4
[14] AND 1
[15] AND 2
[16] AND 3
[17] OR 1
[18] OR 2
[19] OR 3
[20] NOT 1
[21] NOT 2
[22] NOT 3
[23] NOT 4
The command is never
active
The command is always
active
The command comes
from DigInp1
The command comes
from DigInp2
The command comes
from DigInp3
The command comes
from DigInp4
The command comes
from DigInp5
The command comes
from DigInp6
The command comes
from DigInp7
The command comes
from DigInp8
The command comes
from ExpDI 1
The command comes
from ExpDI 2
The command comes
from ExpDI 3
The command comes
from ExpDI 4
The command comes
from the output of the
block AND1
The command comes
from the output of the
block AND2
The command comes
from the output of the
block AND3
The command comes
from the output of the
block OR1
The command comes
from the output of the
block OR2
The command comes
from the output of the
block OR3
The command comes
from the output of the
block NOT1
The command comes
from the output of the
block NOT2
The command comes
from the output of the
block NOT3
The command comes
from the output of the
block NOT4
2 0 27 100
% of
F.020
0.1
510
(P.177)
800
(C.000)
AGL50-EV 47
Page 48

Code
I.001 Run Fwd src
I.002 Run Rev src
I.003 Freq Sel 1 src
I.004 Freq Sel 2 src
I.005 Freq Sel 3 src
I.006 Freq Sel 4 src
I.007 Ramp Sel 1 src Source of the Ramp Selector 1 of LCW As for I.000 25 0 27 107
I.008 Ramp Sel 2 src Source of the Ramp Selector 1 of LCW As for I.000 0 0 27 108
I.009 Ext fault src
I.010 Faul reset src
I.011 Bak pwr act src
I.012 Forced stop src
I.100 Dig output 1 cfg Digital output 1 conguration [0] Drive Ready 51 0 78 112
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
[24] FrqSel match
[25] ShortFloorFl
[26] Contactor
(fw 03-07)
[27] Timer 1
(fw 03-07)
Source of the Run Forward command of
LCW
Source of the Run Reverse command of
LCW
Source of the Frequency Selector 1 of
LCW
Source of the Frequency Selector 2 of
LCW
Source of the Frequency Selector 3 of
LCW
Source of the Frequency Selector 4 of
LCW
Source of the External Fault command
of LCW
Source of the Fault Reset command of
LCW
Source of the Backup Power Supply Active
command of LCW
Source of the Forced Stop command of
LCW
As for I.000 3 0 27 101
As for I.000 4 0 27 102
As for I.000 5 0 27 103
As for I.000 6 0 27 104
As for I.000 7 0 27 105
As for I.000 0 0 27 106
As for I.000 8 0 27 109
As for I.000 9 0 27 110
As for I.000 0 0 27 111
[1] Alarm state
[2] Not in alarm
[3] Motor run
[4] Motor stop
[5] REV rotation
[6] Steady state
[7] Ramping
[8] UV running
[9] Out trq>thr
[10] Current lim
[11] DC-link lim
[12] Limit active
[13] Autocapt run
[14] BU overload
[15] Neg pwrfact
[16] PID err ><
[17] PID err>thr
[18] PID err<thr
[19] PIDer><(inh)
[20] PIDerr>(inh)
[21] PIDerr<(inh)
[22] FWD enc rot
[23] REV enc rot
[24] Encoder stop
Def. Min Max Unit Variat. IPA
The command is coming
from the output of the
block Freq Sel match
The command is the
short oor ag
Active when the RUN
contactor has to be
closed, either for upward
or downward motion
Output of Timer 1
0 0 27 185
48 AGL50-EV
Page 49

Code
I.101 Dig output 2 cfg Digital output 2 conguration As for I.100 54 0 78 113
I.102 Dig output 3 cfg Digital output 3 conguration As for I.100 2 0 78 114
I.103 Reserved
I.150 Exp DigOut 1 cfg Extended digital output 1 conguration As for I.100 52 0 78 116
I.151 Exp DigOut 2 cfg Extended digital output 2 conguration As for I.100 53 0 78 117
I.152 Exp DigOut 3 cfg Extended digital output 3 conguration As for I.100 0 0 78 180
I.200 An in 1 Type
I.201 An in 1 offset Analog Input 1 offset 0 -99.9 99.9 % 0.1 119
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
[25] Encoder run
[26] Extern fault
[27] No ext fault
[28] Serial TO
[29] freq=thr1
[30] freq!=thr1
[31] freq>thr1
[32] freq<thr1
[33] freq=thr2
[34] freq!=thr2
[35] freq>thr2
[36] freq<thr2
[37] HS temp=thr
[38] HS temp!=thr
[39] HS temp>thr
[40] HS temp<thr
[41] Output freq
[42] Out freq x 2
[43] CoastThrough
[44] EmgStop
[45] DC braking
[46] Drv OL status
[47] Drv OL warn
[48] Mot OL status
[49] Reserved
[50] Reserved
[51] Contactor
[52] Contactor UP
[53] Contactor DW
[54] Brake cont
[55] Lift start
[56...77] Reserved
[78] Timer 1 out
(fw 03-07)
Setting of the Analog Input 1 type reference (voltage)
[0] +/- 10V
[1] 0-10V/0-20mA
Active when the RUN
contactor has to be
closed, either for upward
or downward motion
Active when the RUN
contactor has to be closed for upward motion
Active when the RUN
contactor has to be
closed for downward
motion
Active when the mechanical brake has to be
released
Active when the inverter
output bridge is enabled
and DC brake is not in
progress
Output of Timer 1
Bipolar ± 10V
Unipolar +10V
Def. Min Max Unit Variat. IPA
1 0 1 118
AGL50-EV 49
Page 50

Code
I.202 An in 1 gain Analog Input 1 gain 1 -9.99 9.99 % 0.01 120
I.203 An in 1 minimum An Input 1 minimun value 0 0 99.99 % 0.1 121
I.204 An in 1 lter
I.205 An in 1 DeadBand Analog Input 1 dead band 0 0 99.9 % 0.01 182
I.210 Reserved
I.211 Reserved
I.212 Reserved
I.213 Reserved
I.214 Reserved
I.215 Reserved
I.220 Reserved
I.221 Reserved
I.222 Reserved
I.223 Reserved
I.224 Reserved
I.225 Reserved
I.300 Analog out 1 cfg Analog Output 1 conguration [0] Freq out abs
I.301 An out 1 offset Analog output 1 offset 0 -9.99 9.99 0.01 134
I.302 An out 1 gain Analog output 1 gain 1 -9.99 9.99 0.01 135
I.303 An out 1 lter Time constant of output lter 0 0 2.5 sec 0.01 136
I.310 Analog out 2 cfg Analog Output 2 conguration As for I.300 2 0 22 137
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Time constant of digital lter on Analog
input 1
[1] Freq out Output Frequency.
[2] Output curr Output Current.
[3] Out voltage Output Voltage.
[4] Out trq (pos)
[5] Out trq (abs)
[6] Out trq Output Torque.
[7] Out pwr (pos)
[8] Out pwr (abs)
[9] Out pwr Output Power.
[10] Out PF Output Power Factor.
[11] Enc freq abs
[12] Encoder freq Encoder frequency.
[13] Freq ref abs
[14] Freq ref Frequency reference
[15] Load current Load Current.
[16] Magn current
[17] PID output PID regulator output.
[18] DClink volt DC bus capacitors level.
[19] U current
[20] V current
[21] W current
[22] Freq ref fac
Output Frequency
absolute value.
Output Torque positive
value.
Output Torque absolute
value.
Output Power positive
value.
Output Power absolute
value.
Encoder frequency
absolute value.
Frequency reference
absolute value.
Motor Magnetizing
Current.
Output phase U current
signal.
Output phase V current
signal.
Output phase W current
signal.
Multiplier factor for
frequency reference
Def. Min Max Unit Variat. IPA
0.1 0.001 0.25 sec 0.001 122
0 0 22 133
50 AGL50-EV
Page 51

Code
I.311 An out 2 offset Analog output 2 offset 0 -9.99 9.99 0.01 138
I.312 An out 2 gain Analog output 2 gain 1 -9.99 9.99 0.01 139
I.313 An out 2 lter Time constant of output lter 0 0 2.5 sec 0.01 140
I.350 Exp an out 1 cfg
I.351 Exp AnOut 1 offs Expansion Analog Output 1 offset 0 -9.99 9.99 0.01 142
I.352 Exp AnOut 1 gain Expansion Analog Output 1 gain 1 -9.99 9.99 0.01 143
I.353 Exp AnOut 1 lt Time constant of output lter 0 0 2.5 sec 0.01 144
I.400 Inp by serial en Virtual Digital enabling 0 0 255 145
I.410 Exp in by ser en
I.420 Out by serial en Virtual Digital Outputs setting enabling 0 0 15 147
I.430 Exp OutBySer en Expansion Virtual Digital Outputs enabling 0 0 3 148
I.450 An out by ser en Virtual Analog Outputs enabling 0 0 255 149
I.500 Encoder enable Enabling of the encoder measure [0] Disable
I.501 Encoder ppr Encoder nameplate pulses per revolution 1024 1 9999 151
I.502 Enc channels cfg Encoder channels conguration [0] One Channel A (K1) encoder channel 1 0 1 152
I.503 Enc spd mul fact
I.504 Enc update time Encoder pulses sampling time [0] 1ms 0 0 5 154
I.505 Enc power supply Encoder power supply level [0] 5.2V 0 0 3 181
I.506 Enc fault enable Enable ENC alarm, Encoder cable break [0] Disable Encoder alarm disabled 0 0 1 197
I.600 Serial link cfg Serial line conguration protocol & mode
I.601 Serial link bps Serial line baudrate [0] 600 baud 600 baud rate 4 0 6 156
I.602 Device address Serial line address of the drive 1 0 99 1 157
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Expansion Analog Output 1 conguration
(on Exp. board)
Expansion Virtual Digital
Inputs enabling
Multiplier factor of the encoder pulses, set
in the I.501
As for I.300 3 0 22 141
[1] Enable
[1] Two Channels
[1] 4ms
[2] 16ms
[3] 0.25s
[4] 1s
[5] 5s
[1] 5.6V
[2] 8.3V
[3] 8.7V
[1] Enable Encoder alarm enabled
[0] FoxLink 7E1
[1] FoxLink 701 FoxLink 7O1 (7) Odd (1)
[2] FoxLink 7N2
[3] FoxLink 8N1
[4] ModBus 8N1
[5] JBus 8N1 Jbus 8N1 (8) None (1)
[1] 1200 baud 1200 baud rate
[2] 2400 baud 2400 baud rate
[3] 4800 baud 4800 baud rate
[4] 9600 baud 9600 baud rate
[5] 19200 baud 19200 baud rate
[6] 38400 baud 38400 baud rate
Encoder measure
disabled.
Encoder measure
enabled.
A and B (K1 and K2)
encoder channels
Type(DataBit) Parity
(StopBit)
FoxLink 7E1 (7) Even
(1 )
FoxLink 7N2 (7) None
(2)
FoxLink 7O1 (8) None
(1)
Modbus 8N1 (8) None
(1)
Def. Min Max Unit Variat. IPA
0 0 15 146
0 0 1 150
1 0.01 99.99 153
4 0 5 0.1 155
AGL50-EV 51
Page 52

Code
I.603 Ser answer delay Serial line answer delay time 1 0 250 msec 1 158
I.604 Serial timeout Serial line transmission timeout 0 0 25 sec 0.1 159
I.605 En timeout alm Setting time out alarm [0] Disable
I.700 Reserved Expansion optional 1 card type
I.701 Reserved
I.750 Reserved
I.751 Reserved
I.752 Reserved
I.753 Reserved
I.754 Reserved
I.760 Reserved
I.761 Reserved
I.762 Reserved
I.763 Reserved
I.764 Reserved
I.765 Reserved
I.770 Reserved
I.771 Reserved
I.772 Reserved
I.773 Reserved
I.774 Reserved
I.775 Reserved
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Drive NOT in alarm and
signal on a digital output
[1] Enable
Drive IN alarm and signal
on a digital output
Def. Min Max Unit Variat. IPA
0 0 1 160
FREQ & RAMP
F.000 Motorpot ref
F.010 Mp Acc/Dec time Motorpot Accel. and Decel. ramp time 10 0.1 999.9 sec 0.1 301
F.011 Motorpot offset Motopotentiometer minimum reference 0 0 F.020 Hz 0.1 302
F.012 Mp output mode Unipolar / bipolar Motorpotentiometer [0] Unipolar 0 0 1 303
F.013 Mp auto save Motopotenziometer auto save function [0] Disable 1 0 1 304
F.014 MpRef at stop
F.020 Max ref freq
F.021 Min ref freq Minimum frequency value 0 0 F.020 Hz 0.1 306
F.050 Ref 1 channel Source of the Reference 1 [0] Null Null 4 4 4 307
F.051 Ref 2 channel Source of the Reference 2 [0] Null Null 0 0 8 308
Motopot reference (it can be set using up
and down commands)
Behavior of the frequency reference
from Motorpotentiometer during a Stop
sequence
Motor maximum frequency value (for both
directions)
[1] Bipolar
[1] Enable
[0] Last value
[1] Follow ramp
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Freq ref x
[4] Multispeed Multi frequncies
[5] Motorpotent
[6] Analog inp 3 Analog input 3
[7] Encoder Encoder signal
[8] Reserved
Mot. reference will retain
its current value
Mot. reference will ramp
down to zero, following
the deceleration ramp
in use
Frequency reference
F.100 (S.203)
Motorpotientometer
reference
0 0 F.020 Hz 0.01 300
0 0 1 351
50 25 250 Hz 0.1 305
52 AGL50-EV
Page 53

Code
F.060 MltFrq channel 1 Source of the Multispeed 1
F.061 MltFrq channel 2 Source of the Multispeed 2
F.080 FreqRef fac src
F.100 Frequency ref 0 Digital Reference frequency 0 10 -F.020 F.020 Hz 0.1 311
F.101 Frequency ref 1 Digital Reference frequency 1 50 -F.020 F.020 Hz 0.1 312
F.102 Frequency ref 2 Digital Reference frequency 2 0 -F.020 F.020 Hz 0.1 313
F.103 Frequency ref 3 Digital Reference frequency 3 0 -F.020 F.020 Hz 0.1 314
F.104 Frequency ref 4 Digital Reference frequency 4 0 -F.020 F.020 Hz 0.1 315
F.105 Frequency ref 5 Digital Reference frequency 5 0 -F.020 F.020 Hz 0.1 316
F.106 Frequency ref 6 Digital Reference frequency 6 0 -F.020 F.020 Hz 0.1 317
F.107 Frequency ref 7 Digital Reference frequency 7 0 -F.020 F.020 Hz 0.1 318
F.108 Frequency ref 8 Digital Reference frequency 8 0 -F.020 F.020 Hz 0.1 319
F.109 Frequency ref 9 Digital Reference frequency 9 0 -F.020 F.020 Hz 0.1 320
F.110 Frequency ref 10 Digital Reference frequency 10 0 -F.020 F.020 Hz 0.1 321
F.111 Frequency ref 11 Digital Reference frequency 11 0 -F.020 F.020 Hz 0.1 322
F.112 Frequency ref 12 Digital Reference frequency 12 0 -F.020 F.020 Hz 0.1 323
F.113 Frequency ref 13 Digital Reference frequency 13 0 -F.020 F.020 Hz 0.1 324
F.114 Frequency ref 14 Digital Reference frequency 14 0 -F.020 F.020 Hz 0.1 325
F.115 BakPwr max freq
F.116 Smooth start frq Frequency reference during smooth start 2 -F.020 F.020 Hz 0.1 327
F.201 Acceleration 1 Linear acceleration with ramp set 1 0.6 0.01 5.0 m/s2 0.01 329
F.202 Deceleration 1 Linear deceleration with ramp set 1 0.6 0.01 5.0 m/s2 0.01 330
F.203 Acceleration 2 Linear acceleration with ramp set 2 0.6 0.01 5.0 m/s2 0.01 331
F.204 Deceleration 2 Linear deceleration with ramp set 2 0.6 0.01 5.0 m/s2 0.01 332
F.205 Acceleration 3 Linear acceleration with ramp set 3 0.6 0.01 5.0 m/s2 0.01 333
F.206 Deceleration 3 Linear deceleration with ramp set 3 0.6 0.01 5.0 m/s2 0.01 334
F.207 Acceleration 4 Linear acceleration with ramp set 4 0.6 0.01 5.0 m/s2 0.01 335
F.208 Deceleration 4 Linear deceleration with ramp set 4 0.6 0.01 5.0 m/s2 0.01 336
F.250 Ramp S-shape S-shaped ramp enable [0] Disable Linear ramps 1 0 1 337
F.251 Jerk acc ini 1
F.252 Jerk acc end 1
F.253 Jerk dec ini 1
F.254 Jerk dec end 1
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Freq ref x
[4] Multispeed Multispeed
[5] Motorpotent
[6] Analog inp 3 Analog input 3
[7] Encoder Encoder signal
[8] Reserved
Frequency reference multiplier factor
source
Digital refer frequency 15. When in backup
power mode, it denes the upper limit of
the inverter output frequency
Jerk applied at the beginning of an acceleration with ramp sets 1 and 3
Jerk applied at the end of an acceleration
with ramp sets 1 and 3
Jerk applied at the beginning of a deceleration with ramp sets 1 and 3
Jerk applied at the end of a deceleration
with ramp sets 1 and 3
[0] Null Null 0 0 3 342
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 2
[1] Enable S-shaped ramps
Frequency reference
F.101
Motorpotientometer
reference
As for F.050, Reference
1 source
As for F.051, Reference
2 source
Def. Min Max Unit Variat. IPA
3 0 8 309
3 0 8 310
5 -F.020 F.020 Hz 0.1 326
1.00 0.01 10.00 m/s3 0.01 343
1.40 0.01 10.00 m/s3 0.01 344
1.40 0.01 10.00 m/s3 0.01 345
1.00 0.01 10.00 m/s3 0.01 346
AGL50-EV 53
Page 54

Code
F.255 Jerk acc ini 2
F.256 Jerk acc end 2
F.257 Jerk dec ini 2
F.258 Jerk dec end 2
F.260 Ramp extens src
F.270 Jump amplitude Jump frequencies hysteresis 0 0 100 Hz 0.1 339
F.271 Jump frequency 1 Jump frequency 1 0 0 250 Hz 0.1 340
F.272 Jump frequency 2 Jump frequency 2 0 0 250 Hz 0.1 341
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Jerk applied at the beginning of an acceleration with ramp sets 2 and 4
Jerk applied at the end of an acceleration
with ramp sets 2 and 4
Jerk applied at the beginning of a deceleration with ramp sets 2 and 4
Jerk applied at the end of a deceleration
with ramp sets 2 and 4
Source for the Ramp time extension
function
[0] Null Null 0 0 3 338
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
Def. Min Max Unit Variat. IPA
1.00 0.01 10.00 m/s3 0.01 347
1.40 0.01 10.00 m/s3 0.01 348
1.40 0.01 10.00 m/s3 0.01 349
1.00 0.01 10.00 m/s3 0.01 350
PARAMETER
P.000 Cmd source sel
P.002 Reversal enable Reversal enabling [0] Disable
P.003 Safety Safe start denition [0] OFF
P.010 Control mode Drive control mode [0] V/f open loop
P.020 Mains voltage Rated value of the line voltage 230 400 230 480 V 404
P.021 Mains frequency Rated value of the line voltage frequency 50 50 50 60 Hz 405
P.040 Motor rated curr Rated current of the motor (*) (*) (*) A 0.1 406
P.041 Motor pole pairs Pole Pairs of the motor 2 1 60 407
P.042 Motor power fact Motor power factor (*) 0.01 1 0.01 408
P.043 Motor stator R
P.044 Motor cooling Motor type cooling [0] Natural Self ventilated 0 0 1 410
P.045 Motor thermal K Motor thermal constant 30 1 120 min 411
P.060 V/f shape V/F Curve Type [0] Custom
P.061 Base voltage Motor base (rated) voltage 380 50 528 V 1 413
P.062 Base frequency Base frequency 50 25 500 Hz 0.1 414
P.063 V/f interm volt V/F intermediate voltage 190 0 P.061 V 1 415
It denes the use of START and STOP
commands
Measurement of the stator resistance of
the motor
[0] CtrlWordOnly 0 0 1 400
[1] CtlWrd & kpd
Disabling reverse
rotation
[1] Enable Enabling reverse rotation
START allowed with
RUN temirnal connected
at the power on
[1] ON
[1] V/f clsd loop
380
400
420
440
460
480
60
[1] Forced Assisted ventilation
[1] Linear Linear characteristic
[2] Quadratic Quadratic characteristic
START not allowed with
RUN temirnal connected
at the power on
V/f control w/o encoder
feedback
V/f control with encoder
feedback
V/F curve dened by
the user
1 0 1 402
1 0 1 403
0 0 1 498
(*) 0 99.99 ohm 0.01 409
1 0 2 412
54 AGL50-EV
Page 55

Code
P.064 V/f interm freq V/F intermediate frequency 25 1.0 P.062 Hz 0.1 416
P.080 Max output freq Maximum output frequency 110 0 11 0
P.081 Min output freq Minimum output frequency 0.0 0.0 25.0
P.100 Slip compensat
P.101 Slip comp lter Time constant of slip compensation 0.3 0 10 sec 0.1 420
P.102 Slip comp regen
P.120 Manual boost [%] Torque boost level 3 0 25
P.121 Boost factor src Boost level source [0] Null Null 0 0 3 422
P.122 Auto boost en Automatic boost function enabling [0] Disable
P.140 Magn curr gain Magnetizing current regulator gain 0 0 100 % 0.1 424
P.160 Osc damping gain Damping gain 10 0 100 1 425
P.170 Spd ctrl P-gainL Speed loop proportional gain (low speed) 2.0 0.0 100.0 % 0.1 501
P.171 Spd ctrl I-gainL Speed loop integral gain (low speed) 1.0 0.0 100.0 % 0.1 502
P.172 Spd ctrl P-gainH Speed loop proportional gain (high speed) 2.0 0.0 100.0 % 0.1 503
P.173 Spd ctrl I-gainH Speed loop integral gain (high speed) 1.0 0.0 100.0 % 0.1 504
P.174 Spd gain thr L Speed loop gain scheduling low threshold 0.0 0.0 F.020 Hz 0.1 507
P.175 Spd gain thr H Speed loop gain scheduling high threshold 0.0 0.0 F.020 Hz 0.1 508
P.176 Spd PI High lim Speed regulator High limit 10.0 0.0 100.0
P.177 Spd PI Low lim Speed regulator Low limit -10.0 -100.0 0.0
P.178 SpdPI lim FacSrc Speed regulator limits factor source [0] Null Null 0 0 3 511
P.180 SW clamp enable Current clamp enable [0] Disable 1 0 1 426
P.181 Clamp alm HldOff
P.200
P.201 Accel curr limit Current limit in acceleration phase (*) 20 (*)
P.202 En lim in steady Enable current limitation in steady state [0] Disable 0 0 1 429
P.203 Curr lim steady Current limit at constant speed (*) 20 (*)
P.204 Curr ctrl P-gain Current limiter proportional gain 10.0 0.1 100.0 % 431
P.205 Curr ctrl I-gain Current limiter integral gain 30.0 0.0 100.0 % 0.1 432
P.206 Curr ctr feedfwd Current limiter feed-forward 0 0 250 % 1 433
P.207 Decel curr limit Current limit in deceleration phase (*) 20 (*)
P.220 En DC link ctrl
Name DESCRIPTION Selection Description
Ramp CurLim
mode
PARAMETER PICK LIST
Amount of slip compensation during
motoring
Amount of slip compensation during
regeneration
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
Automatic boost function
disabled
[1] Enable
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
[1] Enable
Holf off time for current clamp alarm. Set
to maximum (25.5s) to disable the alarm
Enable current limitation during ramp [0] None 0 0 2 427
[1] PI Limitator
[2] Ramp freeze
[1] Enable
Stall prevention during dec.
for overvoltage
[0] None None 0 0 2 434
Automatic boost function
enabled
Def. Min Max Unit Variat. IPA
% of
F.020
% of
F.020
50 0 250 % 1 419
50 0 250 % 1 500
% of
P.061
0 0 1 423
% of
F.020
% of
F.020
3.0 0 25.5 s 0.1 512
% of I
nom
% of I
nom
% of I
nom
1 417
0.1 418
1 421
0.1 509
0.1 510
428
1 430
1 494
AGL50-EV 55
Page 56

Code
P.221 DC-lnk ctr Pgain DC link voltage limiter proportional gain 3.0 0.1 100.0 % 0.1 435
P.222 DC-lnk ctr Igain DC link voltage limiter integral gain 10.0 0.0 100.0 % 0.1 436
P.223 DC-link ctr FF DC link voltage limiter feed-forward 0 0 250 % 1 437
P.240 OverTorque mode Overtorque mode [0] No Alm,Chk on
P.241 OT curr lim thr Current limit for overtorque 110 20 200 % 1 439
P.242 OT level fac src Overtorque level factor source [0] Null Null 0 0 3 440
P.243 OT signal delay Delay time for overtorque signaling 0.1 0.1 25 sec 0.1 441
P.260 Motor OL prot en Enabling of motor overload protection [0] Disable 1 0 1 444
P.280 BU conguration Braking unit conguration [0] BU disabled BU disabled 1 0 2 445
P.281 Brake res value Ohmic value of braking resistor (*) 1 250 ohm 1 446
P.282 Brake res power Braking resistor power (*) 0.01 25 kW 0.01 447
P.283 Br res thermal K Braking resistor thermal constant (*) 1 250 sec 1 448
P.300 DC braking level DC braking level 75 0 100
P.301 DCB lev fac src DC braking level factor source [0] Null Null 0 0 3 450
P.321 Autocapture Ilim Catch on ight current limit 120 20 (*)
P.322 Demagnetiz time Demagnetization minimun time (*) 0.01 10 sec 0.01 457
P.323 Autocap f scan t Frequency scanning time during Pick Up 1 0.1 25 sec 0.1 458
P.324 Autocap V scan t Voltage scanning time during Pick Up 0.2 0.1 25 V 0.1 459
P.340 Undervoltage thr Undervoltage threshold 0 0 80
P.341 Max pwrloss time Restart time from undervoltage 0 0 25 sec 0.1 463
P.342 UV alarm storage Enabling of undervoltage alarm storage [0] Disable 1 0 1 464
P.343 UV Trip Mode Undervoltage tripping mode [0] Disabled Function disabled 0 0 2 491
P.344 BU threshold factor BU Threshold setting 100 90 100 % 1 514
P.360 OV prevention
P.380 Autoreset attmps Number of autoreset attempts 0 0 255 466
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
[1] PI Limitator PI Limit regulator
[2] Ramp freeze On/Off Ramp
[1] No Alm,Chk ss
[2] Alm always
[3] Alm steady st
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
[1] Enable
[1] BU en OL dis
[2] BU en OL en BU & Overload enabled
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
[1] Enable
[1] CoastThrough
[2] Emg stop Emergency stop mode
Automatic PickUp enabling after Overvoltage
[0] Disable 0 0 1 465
[1] Enable
0: Overtorque detection
always active and Overtorque alarm disabled.
1: Overtorque detection
in steady state and Overtorque alarm disabled.
2: Overtorque detection
always active and Overtorque alarm enabled.
3: Overtorque detection
in steady state and Overtorque alarm enabled.
BU enabled & Overload
disable
Kinetic energy recovering
Def. Min Max Unit Variat. IPA
0 0 3 438
% of I
nom
% of I
nom
% of
P.020
1 449
1 456
1 462
56 AGL50-EV
Page 57

Code
P.381 Autoreset clear En. automatic reset of autorestart attempts 10 0 250 min 1 467
P.382 Autoreset delay Autoreset time delay 5 0.1 50 sec 0.1 468
P.383 Autores t rly
P.400 Ext fault mode External fault detection mode [0] Alm alw,No AR
P.410 Ph Loss detec en Phase Loss detection enabling [0] Disable 1 0 1 492
P.420 Volt reduc mode Voltage reduction mode [0] Always Always 0 0 1 471
P.421 V reduction fact 100 10 100
P.422 V fact mult src
P.440 Frequency thr 1 Frequency 1 level detection 0.5 0 F.020 Hz 0.1 474
P.441 Freq prog 1 hyst Hysteresis amplitude related to P-420 0.2 0 F.020 Hz 0.1 475
P.442 Frequency thr 2 Frequency 2 level detection 0 0 F.020 Hz 0.1 476
P.443 Freq prog 2 hyst Hysteresis amplitude related to P-422 0.5 0 F.020 Hz 0.1 477
P.460 Const speed tol Tolerance at constant speed 0 0 25 Hz 0.1 478
P.461 Const speed dly Ramp end signalling delay 0.1 0 25 sec 0.1 479
P.480 Heatsnk temp lev Heatsink temperature signalling level 70 10 110 °C 1 480
P.481 Heatsnk temp hys Hysteresis band related to P.480 5 0 10 °C 1 481
P.482 UHS Detect Mode Enable UHS alarm
P.500 Switching freq Modulation frequency [0] 1kHz (*) 0 (*) 482
P.501 Sw freq reduc en Enabling of switching frequency reduction [0] Disable 0 0 1 483
P.502 Min switch freq Minimum switching frequency As for P.500 (*) 0 P.500 495
P.520 Overmod max lev Overmodulation level 0 0 100 % 1 484
P.540 Out Vlt auto adj Automatic adjustment of output voltage 1 0 1 485
P.560 Deadtime cmp lev Dead times compensation limit (*) 0 255 486
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Alarm relay contacts behaviour during
autoreset
Source of voltage reduction factor
multiplier
[0] OFF 1 0 1 469
[1] ON
[1] Alm run,No AR
[2] Alm alw, ARes
[3] Alm run, ARes
[1] Enable
[1] Steady state Costant speed only
[0] Null Null 0 0 3 473
[1] Analog inp 1 Analog input 1
[2] Reserved
[3] Reserved
[0] Disable
[1] Enable
[1] 2kHz
[2] 3kHz
[3] 4kHz
[4] 6kHz
[5] 8kHz
[6] 10kHz
[7] 12kHz
[8] 14kHz
[9] 16kHz
[10] 18kHz
[1] Enable
- Drive in alarm. Alarm
always active. Alarm
autoreset is not possible.
- Drive in alarm. Alarm
active only with running
motor. Alarm autoreset is
not possible.
- Drive in alarm. Alarm
always active. Alarm
autoreset is possible.
- Drive in alarm. Alarm
active only with running
motor. Alarm autoreset is
possible.
Def. Min Max Unit Variat. IPA
0 0 3 470
% of
P.061
0 0 1 513
1 472
AGL50-EV 57
Page 58

Code
P.561 Deadtime cmp slp Dead times compensation slope (*) 0 255 487
P.580 Startup display
P.600 Speed dsply fact Speed conversion constant for display 10.00 0.01 99.99 0.01 489
P.998 Param access lev Access level 2 1 3 499
P.999 Param prot code Parameters protection code 0 Protection
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
IPA of the parameter to be displayed at
power on
disabled
1 Protection
enabled
(*) = only with
motor stopped
2 Protection
enabled
(*) = only with
motor stopped
3 Protection
disabled
Stopped motor: possibility to write all parameters.
Running motor: some
parameters are writing
protected (IPA in bold)
All parameters are writing protected excepted:
- F000, F100..F116,
multispeed function
parameters
- P999 Param prot code
- C000 Save parameter
(*)
- C020 Alarm clear
- H500..H511, serial line
commands.
All parameters are writing protected excepted:
- P999 Param prot code
- C000 Save parameter
(*)
- C020 Alarm clear
- H500..H511, serial line
commands.
Stopped motor: possibility to write all parameters.
Running motor: some
parameters are writing
protected (IPA in bold)
Possibility to execute
Save parameter also
with running motor.
Def. Min Max Unit Variat. IPA
8 1 1999 488
0 0 3 490
APPLICATION
A.000 PID mode PID mode [0] Disable Null 0 0 6 1200
[1] Freq sum
[2] Freq direct
[3] Volt sum
[4] Volt direct
[5] Stand alone
[6] St-Al always
A.001 PID ref sel PID reference selector [0] Null Null 0 0 7 1201
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
[4] Frequency ref Frequency reference
[5] Ramp output Ramp output
[6] Digital ref Internal reference
[7] Encoder freq Encoder frequency
A.002 PID fbk sel PID feedback selector [0] Null Null 0 0 7 1202
PID out in sum with ramp
out ref (Feed forward)
PID out not in sum with
ramp out ref (no Feed
forward)
PID out in sum with
voltage ref from V/f curve
(Feed forward)
PID out not in sum with
voltage ref from V/f curve
(no Feed forward)
PID function as generic
control (only with drive
in RUN)
PID function as generic
control (any drive status)
58 AGL50-EV
Page 59

Code
A.003 PID digital ref PID digital reference 0 -100 100 % 0.1 1203
A.004 PID activat mode PID active in steady state only [0] Always 0 0 1 1204
A.005 PID-Encoder sync Enabling of encoder / PID synchronism [0] Disable 0 0 1 1205
A.006 PID err sign rev Error sign reversal [0] Disable 0 0 1 1206
A.007 PIDInteg init en Integral term initialization at start [0] Disable 0 0 1 1207
A.008 PID update time PID updating time 0 0 2.5 sec 0.01 1208
A.050 PID Prop gain 1 Proportional term gain 1 0 0 99.99 0.01 1209
A.051 PID Int tconst 1 Integral action time 1 99.99 0 99.99 0.01 1210
A.052 PID Deriv gain 1 Derivative action time 1 0 0 99.99 0.01 1211
A.053 PID Prop gain 2 Proportional term gain 2 0 0 99.99 0.01 1212
A.054 PID Int tconst 2 Integral action time 2 99.99 0 99.99 0.01 1213
A.055 PID Deriv gain 2 Derivative action time 2 0 0 99.99 0.01 1214
A.056 PID high limit PID output upper limit 100 -100 100 % 0.1 1215
A.057 PID low limit PID output lower limit -100 -100 100 % 0.1 1216
A.058 PID max pos err PID max. positive error 5 0.1 100 % 0.1 1217
A.059 PID min neg err PID max. negative error 5 0.1 100 % 0.1 1218
A.080 Cont close delay RUN contactor close delay 0.20 0 10 s 0.01 1316
A.081 Magnet time Motor magnetization time 1 0 10 s 0.01 1317
A.082 Brake open delay Brake contactor open delay 0.20 0 10 s 0.01 1318
A.083 Smooth start dly Smooth start duration 0 0 10 s 0.01 1319
A.084 DCBrake stp time Duration of 0Hz braking at stop 1 0 10 s 0.01 1320
A.085 Brake close dly Brake contactor close delay 0.20 0 10 s 0.01 1321
A.086 Cont open delay RUN contactor open delay 0.20 0 10 s 0.01 1322
A.087 Current pres thr
A.088 Sel match code
A.090 Car max speed
A.091 Ramp factor 1
A.092 Ramp factor 2
A.220 Lift stop mode Lift behavior at stop [0] Dcb at stop DC brake is perfor-
A.221 Lift start seq
Name DESCRIPTION Selection Description
(fw 03-07)
PARAMETER PICK LIST
[1] Analog inp 1 Analog input 1
[2] Analog inp 2 Analog input 2
[3] Analog inp 3 Analog input 3
[4] Encoder freq Encoder frequency
[5] Output curr Output peak current
[6] Output torque Output torque
[7] Output power Output power
[1] Steady state
[1] Enable
[1] Enable
[1] Enable
Current threshold for inverter output
phases check
Code to be compared to the status of Freq
selectors
Speed of the lift car when the inverter
output frequency is equal to P.062
multiplier for acc/dec and jerks of ramp
sets 1 and 3
multiplier for acc/dec and jerks of ramp
sets 2 and 4
med after the output
frequency is below P.440
threshold
[1] Normal stop DC brake is not perfor-
med at stop
Select working mode of Lift start sequence [0] Normal You can activate the start
sequence with the Run
Fwd command or Run
Rev command
Def. Min Max Unit Variat. IPA
10 0 100 % 1 1325
0 0 15 1326
0.50 0.01 5.00 m/s 0.01 1323
1.00 0.01 2.50 0.01 1324
1.00 0.01 2.50 0.01 1327
1 0 1 1350
0 0 1 1351
AGL50-EV 59
Page 60

Code
A.300 AND1 In 1 src Source of In 1 of logic block AND1 see list of I.000 0 0 27 1355
A.301 AND1 In 2 src Source of In 2 of logic block AND1 see list of I.000 0 0 27 1356
A.302 AND2 In 1 src Source of In 1 of logic block AND2 see list of I.000 0 0 27 1357
A.303 AND2 In 2 src Source of In 2 of logic block AND2 see list of I.000 0 0 27 1358
A.304 AND3 In 1 src Source of In 1 of logic block AND3 see list of I.000 0 0 27 1359
A.305 AND3 In 2 src Source of In 2 of logic block AND3 see list of I.000 0 0 27 1360
A.306 OR1 In 1 src Source of In 1 of logic block OR1 see list of I.000 0 0 27 1361
A.307 OR1 In 2 src Source of In 2 of logic block OR1 see list of I.000 0 0 27 1362
A.308 OR2 In 1 src Source of In 1 of logic block OR2 see list of I.000 0 0 27 1363
A.309 OR2 In 2 src Source of In 2 of logic block OR2 see list of I.000 0 0 27 1364
A.310 OR3 In 1 src Source of In 1 of logic block OR3 see list of I.000 0 0 27 1365
A.311 OR3 In 2 src Source of In 2 of logic block OR3 see list of I.000 0 0 27 1366
A.312 NOT1 In src Source of Input of logic block NOT1 see list of I.000 0 0 27 1367
A.313 NOT2 In src Source of Input of logic block NOT2 see list of I.000 0 0 27 1368
A.314 NOT3 In src Source of Input of logic block NOT3 see list of I.000 0 0 27 1369
A.315 NOT4 In src Source of Input of logic block NOT4 see list of I.000 0 0 27 1370
A.320 Timer 1 mode Select working mode of Timer 1 [0] Disable
A.321 Timer 1 set src Select input signal of Timer 1 See list of I.000 0 0 27 1376
A.322 Timer 1 delay Set delay of Timer 1 See list of I.000 3.00 0.00 30.00 sec 0.01 1377
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
[1] Mltspeed !=0 You can activate the
start sequence with
multispeed selection.
The Multispeed value different from zero causes
the start of sequence.
The Run Fwd command
or Run Rev command
must be present.
[1] On delay
[2] Off delay
[3] On/Off delay
[4] Pulse
[5] Sym asher
Def. Min Max Unit Variat. IPA
0 0 5 1375
COMMAND
C.000 Save parameters Save parameters command off No action. off off do 800
do
C.001 Recall param Recall last set of saved parameters off No action. off off do 801
do
C.002 Load default Recall of the factory parameters. off No action. off off do 802
do Load default parameters.
C.020 Alarm clear Reset of the the Alarm List register off No action. off off do 803
do
C.040 Reserved
C.041 Reserved
C.050 Rst MdplcPrecRun Reset mdplc error at previous run off No action. off off do 809
do Reset mdplc error
C.060 Calculate space Off line space evaluation off No action. off off do 809
do Start
C.070 Reserved
C.071 Reserved
C.100 Measure stator R Motor Autotune command off No action. off off do 806
do Autotune command.
Save parameters
command.
Recall last set of saved
parameters.
Clear alarm register
command.
60 AGL50-EV
Page 61

Code
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Def. Min Max Unit Variat. IPA
HIDDEN
This menu is not available on the keypad. The setting and the reading of the parameters here contained, can be performed exclusively via serial line or through SBI card.
H.000 Virtual digital command 0 0 255 1000
H.001 Exp virtual digital command 0 0 255 1001
H.010 Virtual digital state 0 0 255 1002
H.011 Exp Virtual digital state 0 0 255 1003
H.020 Virtual An Output 1 0 -32768 32767 1004
H.021 Virtual An Output 2 0 -32768 32767 1005
H.022 Exp Virtual An Output 1 0 -32768 32767 1006
H.030
H.031
H.032
H.033
H.034 Drive status 0 0 65535 1042
H.040 Progress 0 0 100 1009
H.050
H.051
H.052
H.053
H.054
H.055
H.056
H.057
Drive output frequency at 32bit (LSW)
(d.000)
Drive output frequency at 32bit (MSW)
(d.000)
Drive reference frequency at 32bit (LSW)
(d.001)
Drive reference frequency at 32bit (MSW)
(d.001)
Output speed (d.000)*(P.600) at 32bit
(LSW) (d.007)
Output speed (d.000)*(P600)at 32bit
(MSW) (d.007)
Speed Ref (d.001)*(P.600) at 32bit (LSW)
(d.008)
Speed Ref (d.001)*(P.600) at 32bit (MSW)
(d.008)
H.058 Encoder freq at 32bit (LSW) (d.301) 0 - 2
H.059 Encoder freq at 32bit (MSW) (d.301) 0 - 2
H.060
H.061
Encoder speed (d.000)*(P.600) at 32bit
(LSW) (d.302)
Encoder speed (d.000)*(P.600) at 32bit
(MSW) (d.302)
Bitwise reading of active alarms (bit 0 to
H.062
15). Each bit is associated to a specic
alarm, according to table 9.3.1.
Bitwise reading of active alarms (bit 16 to
H.063
31). Each bit is associated to a specic
alarm, according to table 9.3.1.
H.100 Remote Digital Inputs (0..15) 0 0 65535 1021
H.101 Remote Digital Inputs (16..31) 0 0 65535 1022
H.110 Remote Digital Outputs (0..15) 0 0 65535 1023
H. 111 Remote Digital Outputs (16..31) 0 0 65535 1024
H.120 Remote Analog input 1 0 -32768 32767 1025
H.121 Remote Analog input 2 0 -32768 32767 1026
H.130 Remote Analog output 1 0 -32768 32767 1027
H.131 Remote Analog output 2 0 -32768 32767 1028
H.500 Hardware reset 0 0 1 1029
H.501 Alarm reset 0 0 1 1030
H.502 Coast to stop 0 0 1 1031
H.503 Stop with ramp 0 0 1 1032
31
0 - 2
31
0 - 2
31
0 - 2
31
0 - 2
31
0 - 2
31
0 - 2
31
0 - 2
31
0 - 2
31
31
31
0 - 2
0 - 2 31 2
0 0 2
0 0 2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
2
31 -1
31 -1
31 -1
1010
1011
1012
1013
1014
1015
1016
1017
1018
1019
1044
1045
1060
1061
AGL50-EV 61
Page 62

Code
H.504 Clockwise Start 0 0 1 1033
H.505 Anti-clockwise Start 0 0 1 1034
H.506 Clockwise Jog 0 0 1 1035
H.507 Anti-clockwise Jog 0 0 1 1036
H.508 Clockwise Flying restart 0 0 1 1037
H.509 Anti-clockwise Flying restart 0 0 1 1038
H.510 DC Brake 0 0 1 1039
Name DESCRIPTION Selection Description
PARAMETER PICK LIST
Def. Min Max Unit Variat. IPA
62 AGL50-EV
Page 63

Page 64

Gefran worldwide
GEFRAN DEUTSCHLAND GMBH
Philipp-Reis-Straße 9a
D-63500 Seligenstadt
Ph. +49 (0) 61828090
Fax +49 (0) 6182809222
vertrieb@gefran.de
SIEI AREG - GERMANY
Gottlieb-Daimler Strasse 17/3
D-74385 - Pleidelsheim
Ph. +49 (0) 7144 897360
Fax +49 (0) 7144 8973697
info@sieiareg.de
SENSORMATE AG
Steigweg 8,
CH-8355 Aadorf, Switzerland
Ph. +41(0)52-2421818
Fax +41(0)52-3661884
http://www.sensormate.ch
GEFRAN FRANCE SA
4, rue Jean Desparmet - BP 8237
69355 LYON Cedex 08
Ph. +33 (0) 478770300
Fax +33 (0) 478770320
commercial@gefran.fr
GEFRAN BENELUX NV
ENA 23 Zone 3, nr. 3910
Lammerdries-Zuid 14A
B-2250 OLEN
Ph. +32 (0) 14248181
Fax +32 (0) 14248180
info@gefran.be
GEFRAN UK LTD
Unit 7, Brook Business Centre
54a Cowley Mill Road, Uxbridge,
UB8 2FX
Ph. +44 (0) 8452 604555
Fax +44 (0) 8452 604556
sales@gefran.co.uk
GEFRAN MIDDLE EAST ELEKTRIK VE
ELEKTRONIK SAN. VE TIC. LTD. STI
Yesilkoy Mah. Ataturk
Cad. No: 12/1 B1 Blok K:12
D: 389 Bakirkoy /Istanbul
TURKIYE
Ph. +90212 465 91 21
Fax +90212 465 91 22
GEFRAN SIEI
Drives Technology Co., Ltd
No. 1285, Beihe Road, Jiading
District, Shanghai, China 201807
Ph. +86 21 69169898
Fax +86 21 69169333
info@gefran.com.cn
GEFRAN SIEI - ASIA
31 Ubi Road 1
#02-07, Aztech Building,
Singapore 408694
Ph. +65 6 8418300
Fax +65 6 7428300
info@gefran.com.sg
GEFRAN INDIA
Survey No. 191/A/1,
Chinchwad Station Road,
Chinchwad,
Pune-411033, Maharashtra
Ph. +91 20 6614 6500
Fax +91 20 6614 6501
gefran.india@gefran.in
GEFRAN INC.
8 Lowell Avenue
WINCHESTER - MA 01890
Toll Free 1-888-888-4474
Fax +1 (781) 7291468
info.us@gefran.com
GEFRAN BRASIL
ELETROELETRôNICA
Avenida Dr. Altino Arantes,
377 Vila Clementino
04042-032 SÂO PAULO - SP
Ph. +55 (0) 1155851133
Fax +55 (0) 1132974012
comercial@gefran.com.br
GEFRAN S.p.A.
Via Sebina 74
25050 Provaglio d’Iseo (BS) ITALY
Ph. +39 030 98881
Fax +39 030 9839063
info@gefran.com
www.gefran.com
Drive & Motion Control Unit
Via Carducci 24
21040 Gerenzano [VA] ITALY
Ph. +39 02 967601
Fax +39 02 9682653
infomotion@gefran.com
Technical Assistance :
technohelp@gefran.com
Customer Service :
motioncustomer@gefran.com
Ph. +39 02 96760500
Fax +39 02 96760278
Rev. 0.3- 20-9-2016
1S9AGLEN
 Loading...
Loading...