

Page 1

LISTED
52TL
IND.CONT. EQ.
E83849
GE
Digital Energy
Addendum
B30 Bus Differential System
UR Series Instruction Manual
B30 revision: 7.1x
Manual P/N: 1601-0109-Z3 (GEK-119509B)
GE Digital Energy
650 Markland Street
Markham, Ontario
Canada L6C 0M1
Tel: +1 905 927 7070 Fax: +1 905 927 5098
Internet: http://www.GEDigitalEnergy.com
*1601-0109-Z3*
GE Multilin's Quality Management
System is registered to ISO
9001:2008
QMI # 005094
UL # A3775
Page 2

Copyright © 2015 GE Multilin Inc. All rights reserved.
B30 Bus Differential System UR Series Instruction Manual revision 7.1x.
FlexLogic, FlexElement, FlexCurve, FlexAnalog, FlexInteger, FlexState, EnerVista,
CyberSentry, HardFiber, Digital Energy, Multilin, and GE Multilin are trademarks
or registered trademarks of GE Multilin Inc.
The contents of this manual are the property of GE Multilin Inc. This
documentation is furnished on license and may not be reproduced in whole or
in part without the permission of GE Multilin. The content of this manual is for
informational use only and is subject to change without notice.
Part number: 1601-0109-Z3 (August 2015)
Page 3

TABLE OF CONTENTS
1. GETTING STARTED 1.1 IMPORTANT PROCEDURES
1.1.1 CAUTIONS AND WARNINGS ........................................................................... 1-1
1.1.2 INSPECTION PROCEDURE .............................................................................1-2
1.2 UR OVERVIEW
1.2.1 INTRODUCTION TO THE UR ........................................................................... 1-3
1.2.2 HARDWARE ARCHITECTURE......................................................................... 1-3
1.2.3 UR SOFTWARE ARCHITECTURE ................................................................... 1-4
1.3 ENERVISTA UR SETUP SOFTWARE
1.3.1 REQUIREMENTS ..............................................................................................1-5
1.3.2 SOFTWARE INSTALLATION ............................................................................ 1-5
1.3.3 CONFIGURING THE B30 FOR SOFTWARE ACCESS ....................................1-7
1.3.4 USING THE QUICK CONNECT FEATURE....................................................... 1-9
1.3.5 CONNECTING TO THE B30 RELAY............................................................... 1-14
1.3.6 SETTING UP CYBERSENTRY AND CHANGING DEFAULT PASSWORD ... 1-16
1.4 UR HARDWARE
1.4.1 MOUNTING AND WIRING............................................................................... 1-18
1.4.2 COMMUNICATIONS........................................................................................ 1-18
1.4.3 FACEPLATE DISPLAY.................................................................................... 1-18
1.5 USING THE RELAY
1.5.1 FACEPLATE KEYPAD..................................................................................... 1-19
1.5.2 MENU NAVIGATION ....................................................................................... 1-19
1.5.3 MENU HIERARCHY ........................................................................................ 1-19
1.5.4 RELAY ACTIVATION....................................................................................... 1-19
1.5.5 RELAY PASSWORDS..................................................................................... 1-20
1.5.6 FLEXLOGIC CUSTOMIZATION ...................................................................... 1-20
1.5.7 COMMISSIONING ...........................................................................................1-20
2. PRODUCT DESCRIPTION 2.1 INTRODUCTION
2.1.1 OVERVIEW........................................................................................................ 2-1
2.1.2 SECURITY ......................................................................................................... 2-3
2.1.3 ORDERING........................................................................................................ 2-7
2.1.4 REPLACEMENT MODULES ...........................................................................2-12
2.2 SPECIFICATIONS
2.2.1 PROTECTION ELEMENTS ............................................................................. 2-14
2.2.2 USER-PROGRAMMABLE ELEMENTS........................................................... 2-15
2.2.3 MONITORING.................................................................................................. 2-16
2.2.4 METERING ...................................................................................................... 2-16
2.2.5 INPUTS ............................................................................................................ 2-17
2.2.6 POWER SUPPLY ............................................................................................ 2-18
2.2.7 OUTPUTS ........................................................................................................ 2-18
2.2.8 COMMUNICATION PROTOCOLS .................................................................. 2-19
2.2.9 INTER-RELAY COMMUNICATIONS............................................................... 2-20
2.2.10 ENVIRONMENTAL ..........................................................................................2-20
2.2.11 TYPE TESTS ...................................................................................................2-21
2.2.12 PRODUCTION TESTS .................................................................................... 2-21
2.2.13 APPROVALS ................................................................................................... 2-22
2.2.14 MAINTENANCE ............................................................................................... 2-22
3. HARDWARE 3.1 DESCRIPTION
3.1.1 PANEL CUTOUT ............................................................................................... 3-1
3.1.2 REAR TERMINAL LAYOUT............................................................................... 3-7
3.2 WIRING
3.2.1 TYPICAL WIRING.............................................................................................. 3-8
3.2.2 DIELECTRIC STRENGTH ................................................................................. 3-9
3.2.3 CONTROL POWER ........................................................................................... 3-9
3.2.4 CT/VT MODULES ............................................................................................ 3-10
3.2.5 PROCESS BUS MODULES ............................................................................ 3-12
3.2.6 CONTACT INPUTS AND OUTPUTS...............................................................3-12
GE Multilin B30 Bus Differential System iii
Page 4

TABLE OF CONTENTS
3.2.7 TRANSDUCER INPUTS AND OUTPUTS........................................................3-21
3.2.8 RS232 FACEPLATE PORT..............................................................................3-23
3.2.9 CPU COMMUNICATION PORTS.....................................................................3-23
3.2.10 IRIG-B...............................................................................................................3-26
3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
3.3.1 DESCRIPTION .................................................................................................3-27
3.3.2 FIBER: LED AND ELED TRANSMITTERS ......................................................3-29
3.3.3 FIBER-LASER TRANSMITTERS .....................................................................3-29
3.3.4 G.703 INTERFACE...........................................................................................3-31
3.3.5 RS422 INTERFACE .........................................................................................3-34
3.3.6 RS422 AND FIBER INTERFACE .....................................................................3-36
3.3.7 G.703 AND FIBER INTERFACE ......................................................................3-36
3.3.8 IEEE C37.94 INTERFACE................................................................................3-37
3.3.9 C37.94SM INTERFACE ...................................................................................3-41
4. HUMAN INTERFACES 4.1 ENERVISTA UR SETUP SOFTWARE INTERFACE
4.1.1 INTRODUCTION ................................................................................................4-1
4.1.2 CREATING A SITE LIST ....................................................................................4-1
4.1.3 ENERVISTA UR SETUP OVERVIEW................................................................4-1
4.1.4 ENERVISTA UR SETUP MAIN WINDOW..........................................................4-3
4.2 EXTENDED ENERVISTA UR SETUP FEATURES
4.2.1 SETTINGS TEMPLATES ...................................................................................4-4
4.2.2 SECURING AND LOCKING FLEXLOGIC EQUATIONS....................................4-8
4.2.3 SETTINGS FILE TRACEABILITY.....................................................................4-10
4.3 FACEPLATE INTERFACE
4.3.1 FACEPLATE.....................................................................................................4-13
4.3.2 LED INDICATORS............................................................................................4-14
4.3.3 CUSTOM LABELING OF LEDS .......................................................................4-17
4.3.4 DISPLAY...........................................................................................................4-22
4.3.5 KEYPAD ...........................................................................................................4-22
4.3.6 BREAKER CONTROL ......................................................................................4-22
4.3.7 MENUS.............................................................................................................4-23
4.3.8 CHANGING SETTINGS ...................................................................................4-25
5. SETTINGS 5.1 OVERVIEW
5.1.1 SETTINGS MENU ..............................................................................................5-1
5.1.2 INTRODUCTION TO ELEMENTS......................................................................5-4
5.1.3 INTRODUCTION TO AC SOURCES..................................................................5-5
5.2 PRODUCT SETUP
5.2.1 SECURITY..........................................................................................................5-8
5.2.2 DISPLAY PROPERTIES ..................................................................................5-24
5.2.3 CLEAR RELAY RECORDS ..............................................................................5-25
5.2.4 COMMUNICATIONS ........................................................................................5-26
5.2.5 MODBUS USER MAP ......................................................................................5-58
5.2.6 REAL TIME CLOCK .........................................................................................5-58
5.2.7 USER-PROGRAMMABLE FAULT REPORT....................................................5-63
5.2.8 OSCILLOGRAPHY ...........................................................................................5-64
5.2.9 USER-PROGRAMMABLE LEDS .....................................................................5-66
5.2.10 USER-PROGRAMMABLE SELF TESTS .........................................................5-69
5.2.11 CONTROL PUSHBUTTONS ............................................................................5-70
5.2.12 USER-PROGRAMMABLE PUSHBUTTONS....................................................5-71
5.2.13 FLEX STATE PARAMETERS ..........................................................................5-77
5.2.14 USER-DEFINABLE DISPLAYS........................................................................5-77
5.2.15 DIRECT INPUTS AND OUTPUTS....................................................................5-80
5.2.16 TELEPROTECTION .........................................................................................5-87
5.2.17 INSTALLATION ................................................................................................5-88
5.3 REMOTE RESOURCES
5.3.1 REMOTE RESOURCES CONFIGURATION....................................................5-89
iv B30 Bus Differential System GE Multilin
Page 5

TABLE OF CONTENTS
5.4 SYSTEM SETUP
5.4.1 AC INPUTS ...................................................................................................... 5-90
5.4.2 POWER SYSTEM............................................................................................ 5-91
5.4.3 SIGNAL SOURCES .........................................................................................5-92
5.4.4 BREAKERS......................................................................................................5-95
5.4.5 DISCONNECT SWITCHES .............................................................................5-99
5.4.6 FLEXCURVES ............................................................................................... 5-102
5.4.7 BUS................................................................................................................ 5-109
5.5 FLEXLOGIC
5.5.1 INTRODUCTION TO FLEXLOGIC ................................................................ 5-110
5.5.2 FLEXLOGIC RULES ...................................................................................... 5-118
5.5.3 FLEXLOGIC EVALUATION ........................................................................... 5-119
5.5.4 FLEXLOGIC EXAMPLE ................................................................................. 5-119
5.5.5 FLEXLOGIC EQUATION EDITOR................................................................. 5-124
5.5.6 FLEXLOGIC TIMERS .................................................................................... 5-124
5.5.7 FLEXELEMENTS........................................................................................... 5-125
5.5.8 NON-VOLATILE LATCHES ........................................................................... 5-129
5.6 GROUPED ELEMENTS
5.6.1 OVERVIEW.................................................................................................... 5-130
5.6.2 SETTING GROUP .........................................................................................5-130
5.6.3 BUS DIFFERENTIAL ..................................................................................... 5-131
5.6.4 PHASE CURRENT ........................................................................................ 5-135
5.6.5 NEUTRAL CURRENT.................................................................................... 5-144
5.6.6 GROUND CURRENT..................................................................................... 5-146
5.6.7 BREAKER FAILURE...................................................................................... 5-148
5.6.8 VOLTAGE ELEMENTS.................................................................................. 5-157
5.7 CONTROL ELEMENTS
5.7.1 OVERVIEW.................................................................................................... 5-162
5.7.2 TRIP BUS.......................................................................................................5-162
5.7.3 SETTING GROUPS ....................................................................................... 5-164
5.7.4 SELECTOR SWITCH..................................................................................... 5-166
5.7.5 DIGITAL ELEMENTS..................................................................................... 5-172
5.7.6 DIGITAL COUNTERS .................................................................................... 5-175
5.7.7 MONITORING ELEMENTS ...........................................................................5-177
5.8 INPUTS AND OUTPUTS
5.8.1 CONTACT INPUTS........................................................................................ 5-186
5.8.2 VIRTUAL INPUTS.......................................................................................... 5-188
5.8.3 CONTACT OUTPUTS.................................................................................... 5-189
5.8.4 VIRTUAL OUTPUTS...................................................................................... 5-191
5.8.5 REMOTE DEVICES....................................................................................... 5-192
5.8.6 REMOTE INPUTS.......................................................................................... 5-193
5.8.7 REMOTE DOUBLE-POINT STATUS INPUTS .............................................. 5-194
5.8.8 REMOTE OUTPUTS...................................................................................... 5-194
5.8.9 RESETTING...................................................................................................5-195
5.8.10 DIRECT INPUTS AND OUTPUTS................................................................. 5-196
5.8.11 TELEPROTECTION INPUTS AND OUTPUTS..............................................5-200
5.8.12 IEC 61850 GOOSE ANALOGS...................................................................... 5-202
5.8.13 IEC 61850 GOOSE INTEGERS..................................................................... 5-203
5.9 TRANSDUCER INPUTS AND OUTPUTS
5.9.1 DCMA INPUTS .............................................................................................. 5-204
5.9.2 RTD INPUTS.................................................................................................. 5-205
5.9.3 DCMA OUTPUTS .......................................................................................... 5-207
5.10 TESTING
5.10.1 TEST MODE .................................................................................................. 5-210
5.10.2 FORCE CONTACT INPUTS .......................................................................... 5-211
5.10.3 FORCE CONTACT OUTPUTS ...................................................................... 5-212
6. ACTUAL VALUES 6.1 OVERVIEW
6.1.1 ACTUAL VALUES MENU .................................................................................. 6-1
6.2 STATUS
6.2.1 CONTACT INPUTS............................................................................................ 6-3
GE Multilin B30 Bus Differential System v
Page 6

TABLE OF CONTENTS
6.2.2 VIRTUAL INPUTS ..............................................................................................6-3
6.2.3 REMOTE INPUTS ..............................................................................................6-3
6.2.4 REMOTE DOUBLE-POINT STATUS INPUTS...................................................6-4
6.2.5 TELEPROTECTION INPUTS .............................................................................6-4
6.2.6 CONTACT OUTPUTS ........................................................................................6-4
6.2.7 VIRTUAL OUTPUTS ..........................................................................................6-5
6.2.8 REMOTE DEVICES............................................................................................6-5
6.2.9 DIGITAL COUNTERS.........................................................................................6-6
6.2.10 SELECTOR SWITCHES ....................................................................................6-6
6.2.11 FLEX STATES....................................................................................................6-6
6.2.12 ETHERNET ........................................................................................................6-6
6.2.13 REAL TIME CLOCK SYNCHRONIZING ............................................................6-7
6.2.14 DIRECT INPUTS ................................................................................................6-8
6.2.15 DIRECT DEVICES STATUS ..............................................................................6-8
6.2.16 IEC 61850 GOOSE INTEGERS .........................................................................6-9
6.2.17 EGD PROTOCOL STATUS................................................................................6-9
6.2.18 TELEPROTECTION CHANNEL TESTS...........................................................6-10
6.2.19 REMAINING CONNECTION STATUS .............................................................6-10
6.3 METERING
6.3.1 PARALLEL REDUNDANCY PROTOCOL (PRP) .............................................6-11
6.3.2 METERING CONVENTIONS ...........................................................................6-11
6.3.3 BUS ZONE .......................................................................................................6-14
6.3.4 SOURCES ........................................................................................................6-14
6.3.5 TRACKING FREQUENCY................................................................................6-17
6.3.6 FLEXELEMENTS .............................................................................................6-17
6.3.7 IEC 61580 GOOSE ANALOG VALUES ...........................................................6-18
6.3.8 TRANSDUCER INPUTS AND OUTPUTS........................................................6-18
6.4 RECORDS
6.4.1 USER-PROGRAMMABLE FAULT REPORTS .................................................6-19
6.4.2 EVENT RECORDS...........................................................................................6-19
6.4.3 OSCILLOGRAPHY ...........................................................................................6-19
6.5 PRODUCT INFORMATION
6.5.1 MODEL INFORMATION...................................................................................6-21
6.5.2 FIRMWARE REVISIONS..................................................................................6-21
7. COMMANDS AND
TARGETS
7.1 COMMANDS
7.1.1 COMMANDS MENU...........................................................................................7-1
7.1.2 VIRTUAL INPUTS ..............................................................................................7-1
7.1.3 CLEAR RECORDS.............................................................................................7-2
7.1.4 SET DATE AND TIME ........................................................................................7-2
7.1.5 RELAY MAINTENANCE.....................................................................................7-2
7.1.6 SECURITY..........................................................................................................7-3
7.2 TARGETS
7.2.1 TARGETS MENU ...............................................................................................7-4
7.2.2 TARGET MESSAGES ........................................................................................7-4
7.2.3 RELAY SELF-TESTS .........................................................................................7-4
8. THEORY OF OPERATION 8.1 INTRODUCTION
8.1.1 BUS DIFFERENTIAL PROTECTION .................................................................8-1
8.2 DYNAMIC BUS REPLICA
8.2.1 DYNAMIC BUS REPLICA MECHANISM............................................................8-2
8.2.2 CT RATIO MATCHING.......................................................................................8-3
8.3 DIFFERENTIAL PRINCIPLE
8.3.1 BIASED DIFFERENTIAL CHARACTERISTIC....................................................8-4
8.3.2 DIFFERENTIAL AND RESTRAINING CURRENTS ...........................................8-5
8.3.3 ENHANCED SECURITY ....................................................................................8-6
8.4 DIRECTIONAL PRINCIPLE
8.4.1 CURRENT DIRECTIONAL PROTECTION.........................................................8-7
vi B30 Bus Differential System GE Multilin
Page 7

TABLE OF CONTENTS
8.5 SATURATION DETECTOR
8.5.1 CT SATURATION DETECTION ........................................................................ 8-8
8.6 OUTPUT LOGIC AND EXAMPLES
8.6.1 OUTPUT LOGIC ................................................................................................8-9
8.6.2 INTERNAL AND EXTERNAL FAULT EXAMPLE .............................................. 8-9
9. APPLICATION OF
SETTINGS
9.1 OVERVIEW
9.1.1 INTRODUCTION................................................................................................ 9-1
9.1.2 SAMPLE BUSBAR AND DATA.......................................................................... 9-1
9.2 ZONING AND DYNAMIC BUS REPLICA
9.2.1 DESCRIPTION................................................................................................... 9-3
9.2.2 NORTH BUS ZONE ........................................................................................... 9-3
9.2.3 SOUTH BUS ZONE ........................................................................................... 9-4
9.3 BIASED CHARACTERISTIC BREAKPOINTS
9.3.1 DESCRIPTION................................................................................................... 9-5
9.3.2 HIGH BREAKPOINT .......................................................................................... 9-5
9.3.3 LOW BREAKPOINT........................................................................................... 9-6
9.4 SLOPES AND HIGH SET THRESHOLD
9.4.1 DESCRIPTION................................................................................................... 9-7
9.4.2 EXTERNAL FAULTS ON C-1 ............................................................................ 9-7
9.4.3 EXTERNAL FAULTS ON C-2 ............................................................................ 9-9
9.4.4 EXTERNAL FAULTS ON C-3 ............................................................................ 9-9
9.4.5 EXTERNAL FAULTS ON C-4 .......................................................................... 9-10
9.4.6 EXTERNAL FAULTS ON C-5 .......................................................................... 9-10
9.5 BUS DIFFERENTIAL SETTINGS
9.5.1 DESCRIPTION................................................................................................. 9-11
9.6 ENHANCING RELAY PERFORMANCE
9.6.1 USING SETTING GROUPS............................................................................. 9-12
10. MAINTENANCE 10.1 MODULES
10.1.1 REPLACE A MODULE..................................................................................... 10-1
10.2 BATTERIES
10.2.1 REPLACE BATTERY....................................................................................... 10-3
10.2.2 DISPOSE OF BATTERY.................................................................................. 10-4
10.3 UNINSTALL AND CLEAR FILES AND DATA
10.3.1 UNINSTALL AND CLEAR FILES AND DATA.................................................. 10-7
10.4 REPAIRS
10.4.1 REPAIRS ......................................................................................................... 10-8
10.5 STORAGE
10.5.1 STORAGE........................................................................................................10-9
10.6 DISPOSAL
10.6.1 DISPOSAL ..................................................................................................... 10-10
A. FLEXANALOG AND
FLEXINTEGER
PARAMETERS
B. MODBUS
COMMUNICATIONS
A.1 PARAMETER LISTS
A.1.1 FLEXANALOG ITEMS .......................................................................................A-1
A.1.2 FLEXINTEGER ITEMS ....................................................................................A-10
B.1 MODBUS RTU PROTOCOL
B.1.1 INTRODUCTION................................................................................................B-1
B.1.2 PHYSICAL LAYER.............................................................................................B-1
GE Multilin B30 Bus Differential System vii
Page 8

TABLE OF CONTENTS
B.1.3 DATA LINK LAYER ........................................................................................... B-1
B.1.4 MODBUS RTU CRC-16 ALGORITHM ..............................................................B-2
B.2 MODBUS FUNCTION CODES
B.2.1 SUPPORTED FUNCTION CODES ...................................................................B-4
B.2.2 READ ACTUAL VALUES OR SETTINGS (FUNCTION CODE 03/04H) ...........B-4
B.2.3 EXECUTE OPERATION (FUNCTION CODE 05H)........................................... B-5
B.2.4 STORE SINGLE SETTING (FUNCTION CODE 06H).......................................B-5
B.2.5 STORE MULTIPLE SETTINGS (FUNCTION CODE 10H)................................ B-6
B.2.6 EXCEPTION RESPONSES............................................................................... B-6
B.3 FILE TRANSFERS
B.3.1 OBTAINING RELAY FILES VIA MODBUS........................................................ B-7
B.4 MEMORY MAPPING
B.4.1 MODBUS MEMORY MAP ................................................................................. B-9
B.4.2 DATA FORMATS............................................................................................. B-70
C. IEC 61850
COMMUNICATIONS
C.1 OVERVIEW
C.1.1 INTRODUCTION ............................................................................................... C-1
C.1.2 COMMUNICATION PROFILES......................................................................... C-1
C.1.3 FILE TRANSFER BY IEC 61850.......................................................................C-2
C.2 SERVER DATA ORGANIZATION
C.2.1 OVERVIEW .......................................................................................................C-3
C.2.2 GGIO1: DIGITAL STATUS VALUES.................................................................C-3
C.2.3 GGIO2: DIGITAL CONTROL VALUES..............................................................C-3
C.2.4 GGIO3: DIGITAL STATUS AND ANALOG VALUES FROM GOOSE DATA .... C-3
C.2.5 GGIO4: GENERIC ANALOG MEASURED VALUES.........................................C-3
C.2.6 MMXU: ANALOG MEASURED VALUES ..........................................................C-4
C.2.7 PROTECTION AND OTHER LOGICAL NODES............................................... C-4
C.3 SERVER FEATURES AND CONFIGURATION
C.3.1 BUFFERED/UNBUFFERED REPORTING........................................................C-6
C.3.2 FILE TRANSFER...............................................................................................C-6
C.3.3 TIMESTAMPS AND SCANNING....................................................................... C-6
C.3.4 LOGICAL DEVICE NAME .................................................................................C-6
C.3.5 LOCATION ........................................................................................................C-6
C.3.6 LOGICAL NODE NAME PREFIXES..................................................................C-7
C.3.7 CONNECTION TIMING.....................................................................................C-7
C.3.8 NON-IEC 61850 DATA...................................................................................... C-7
C.3.9 COMMUNICATION SOFTWARE UTILITIES.....................................................C-7
C.4 GENERIC SUBSTATION EVENT SERVICES: GSSE AND GOOSE
C.4.1 OVERVIEW .......................................................................................................C-8
C.4.2 GSSE CONFIGURATION..................................................................................C-8
C.4.3 FIXED GOOSE..................................................................................................C-8
C.4.4 CONFIGURABLE GOOSE ................................................................................ C-8
C.4.5 ETHERNET MAC ADDRESS FOR GSSE/GOOSE ........................................C-11
C.4.6 GSSE ID AND GOOSE ID SETTINGS............................................................C-11
C.5 IEC 61850 IMPLEMENTATION VIA ENERVISTA UR SETUP
C.5.1 OVERVIEW .....................................................................................................C-12
C.5.2 CONFIGURING IEC 61850 SETTINGS ..........................................................C-13
C.5.3 ABOUT ICD FILES .......................................................................................... C-14
C.5.4 CREATING AN ICD FILE WITH ENERVISTA UR SETUP.............................. C-18
C.5.5 ABOUT SCD FILES.........................................................................................C-18
C.5.6 IMPORTING AN SCD FILE WITH ENERVISTA UR SETUP........................... C-21
C.6 ACSI CONFORMANCE
C.6.1 ACSI BASIC CONFORMANCE STATEMENT ................................................ C-23
C.6.2 ACSI MODELS CONFORMANCE STATEMENT............................................C-23
C.6.3 ACSI SERVICES CONFORMANCE STATEMENT .........................................C-24
C.7 LOGICAL NODES
C.7.1 LOGICAL NODES TABLE ............................................................................... C-27
viii B30 Bus Differential System GE Multilin
Page 9

TABLE OF CONTENTS
D. IEC 60870-5-104
COMMUNICATIONS
D.1 IEC 60870-5-104
D.1.1 INTEROPERABILITY DOCUMENT ...................................................................D-1
D.1.2 IEC 60870-5-104 POINTS .................................................................................D-9
E. DNP COMMUNICATIONS E.1 DEVICE PROFILE DOCUMENT
E.1.1 DNP V3.00 DEVICE PROFILE ..........................................................................E-1
E.1.2 IMPLEMENTATION TABLE...............................................................................E-4
E.2 DNP POINT LISTS
E.2.1 BINARY INPUT POINTS....................................................................................E-8
E.2.2 BINARY AND CONTROL RELAY OUTPUT......................................................E-9
E.2.3 COUNTERS .....................................................................................................E-10
E.2.4 ANALOG INPUTS ............................................................................................E-11
F. RADIUS SERVER F.1 RADIUS SERVER CONFIGURATION
F.1.1 RADIUS SERVER CONFIGURATION...............................................................F-1
G. MISCELLANEOUS G.1 CHANGE NOTES
G.1.1 REVISION HISTORY ........................................................................................ G-1
G.1.2 CHANGES TO THE B30 MANUAL................................................................... G-2
G.2 ABBREVIATIONS
G.2.1 STANDARD ABBREVIATIONS ........................................................................ G-5
G.3 WARRANTY
G.3.1 GE MULTILIN WARRANTY .............................................................................. G-7
INDEX
GE Multilin B30 Bus Differential System ix
Page 10

TABLE OF CONTENTS
x B30 Bus Differential System GE Multilin
Page 11

1 GETTING STARTED 1.1 IMPORTANT PROCEDURES
DANGER
WARNING
CAUTION
NOTICE
DANGER
CAUTION
1 GETTING STARTED 1.1IMPORTANT PROCEDURES
Use this chapter for initial setup of your new B30 Bus Differential System.
1.1.1 CAUTIONS AND WARNINGS
Before attempting to install or use the device, review all safety indicators in this document to help prevent injury, equipment
damage, or downtime.
The following safety and equipment symbols are used in this document.
Indicates a hazardous situation which, if not avoided, will result in death or serious injury.
Indicates a hazardous situation which, if not avoided, could result in death or serious injury.
Indicates a hazardous situation which, if not avoided, could result in minor or moderate
injury.
Indicates practices not related to personal injury.
A) GENERAL CAUTIONS AND WARNINGS
The following general safety precautions and warnings apply.
Ensure that all connections to the product are correct so as to avoid accidental risk of shock
and/or fire, for example such as can arise from high voltage connected to low voltage terminals.
Follow the requirements of this manual, including adequate wiring size and type, terminal torque settings, voltage,
current magnitudes applied, and adequate isolation/clearance in external wiring from high to low voltage circuits.
Use the device only for its intended purpose and application.
Ensure that all ground paths are uncompromised for safety purposes during device operation and service.
Ensure that the control power applied to the device, the AC current, and voltage input match the ratings specified
on the relay nameplate. Do not apply current or voltage in excess of the specified limits.
Only qualified personnel are to operate the device. Such personnel must be thoroughly familiar with all safety cautions and warnings in this manual and with applicable country, regional, utility, and plant safety regulations.
Hazardous voltages can exist in the power supply and at the device connection to current transformers, voltage
transformers, control, and test circuit terminals. Make sure all sources of such voltages are isolated prior to
attempting work on the device.
Hazardous voltages can exist when opening the secondary circuits of live current transformers. Make sure that
current transformer secondary circuits are shorted out before making or removing any connection to the current
transformer (CT) input terminals of the device.
For tests with secondary test equipment, ensure that no other sources of voltages or currents are connected to
such equipment and that trip and close commands to the circuit breakers or other switching apparatus are isolated, unless this is required by the test procedure and is specified by appropriate utility/plant procedure.
When the device is used to control primary equipment, such as circuit breakers, isolators, and other switching
apparatus, all control circuits from the device to the primary equipment must be isolated while personnel are
working on or around this primary equipment to prevent any inadvertent command from this device.
Use an external disconnect to isolate the mains voltage supply.
LED transmitters are classified as IEC 60825-1 Accessible Emission Limit (AEL) Class 1M.
Class 1M devices are considered safe to the unaided eye. Do not view directly with optical
instruments.
This product is rated to Class A emissions levels and is to be used in Utility, Substation Industrial
environments. Not to be used near electronic devices rated for Class B levels.
1
GE Multilin B30 Bus Differential System 1-1
Page 12

1.1 IMPORTANT PROCEDURES 1 GETTING STARTED
®
®
Model:
Mods:
Wiring Diagram:
Inst. Manual:
Serial Number:
Firmware:
Mfg. Date:
PO Num:
Item Num:
B30H00HCHF8HH6HM8AP6AU8AW6H
000
See manual
1601-0109
MAZB98000029
D
2012/01/05
600001234.56
Control Power:
Contact Inputs:
Contact Outputs:
88-300V DC @ 35W / 77-265V AC @ 35VA
300V DC Max 10mA
Refer to Instruction Manual
RATINGS:
B30
- M A A B 9 7 0 0 0 0 9 9 -
Bus Differential Relay
GE Multilin
- M A A B 9 7 0 0 0 0 9 9 -
LISTED
52TL
IND.CONT. EQ.
E83849
836781A3.CDR
1.1.2 INSPECTION PROCEDURE
1
1. Open the relay packaging and inspect the unit for physical damage.
2. View the rear nameplate and verify that the correct model has been ordered and delivered.
FIGURE 1–1: REAR NAMEPLATE (EXAMPLE)
3. Ensure that the following items are included:
• Instruction manual (if ordered)
• GE EnerVista™ CD (includes the EnerVista UR Setup software and manuals in PDF format)
• Mounting screws
4. If there is any noticeable physical damage, or any of the contents listed are missing, please contact GE Digital Energy
immediately as follows.
GE DIGITAL ENERGY CONTACT INFORMATION AND CALL CENTER FOR PRODUCT SUPPORT:
GE Digital Energy
650 Markland Street
Markham, Ontario
Canada L6C 0M1
TELEPHONE: Worldwide +1 905 927 7070
Europe/Middle East/Africa +34 94 485 88 54
North America toll-free 1 800 547 8629
FAX: +1 905 927 5098
E-MAIL: Worldwide multilin.tech@ge.com
Europe multilin.tech.euro@ge.com
HOME PAGE: http://www.gedigitalenergy.com/multilin
For updates to the instruction manual, firmware, and software, visit the GE Digital Energy website.
1-2 B30 Bus Differential System GE Multilin
Page 13

1 GETTING STARTED 1.2 UR OVERVIEW
827822A3.CDR
Input elements
LAN
Programming
device
Operator
interface
Contact inputs Contact outputs
Virtual inputs
Virtual outputs
Analog inputs
Analog outputs
CT inputs
VT inputs
Input
status
table
Output
status
table
Pickup
Dropout
Operate
Protective elements
Logic Gates
Remote outputs
- IEC 61850
CPU module
Output elements
Remote inputs
Direct inputs Direct outputs
1.2UR OVERVIEW 1.2.1 INTRODUCTION TO THE UR
The GE Universal Relay (UR) series is a new generation of digital, modular, and multifunction equipment that is easily
incorporated into automation systems, at both the station and enterprise levels.
1.2.2 HARDWARE ARCHITECTURE
A) UR BASIC DESIGN
The UR is a digital-based device containing a central processing unit (CPU) that handles multiple types of input and output
signals. The UR device can communicate over a local area network (LAN) with an operator interface, a programming
device, or another UR device.
1
FIGURE 1–2: UR BLOCK DIAGRAM
The CPU module contains firmware that provides protection elements in the form of logic algorithms, as well as programmable logic gates, timers, and latches for control features.
Input elements accept a variety of analog or digital signals from the field. The UR isolates and converts these signals into
logic signals used by the relay.
Output elements convert and isolate the logic signals generated by the relay into digital or analog signals that can be used
to control field devices.
The software and unit are backwards-compatible with UR devices.
B) UR SIGNAL TYPES
The contact inputs and outputs are digital signals associated with connections to hard-wired contacts. Both ‘wet’ and ‘dry’
contacts are supported.
The virtual inputs and outputs are digital signals associated with UR-series internal logic signals. Virtual inputs include
signals generated by the local user interface. The virtual outputs are outputs of FlexLogic™ equations used to customize
the device. Virtual outputs can also serve as virtual inputs to FlexLogic equations.
The analog inputs and outputs are signals that are associated with transducers, such as Resistance Temperature Detec-
tors (RTDs).
The CT and VT inputs refer to analog current transformer and voltage transformer signals used to monitor AC power lines.
The UR-series relays support 1 A and 5 A CTs.
The remote inputs and outputs provide a means of sharing digital point state information between remote UR-series
devices. The remote outputs interface to the remote inputs of other UR-series devices. Remote outputs are FlexLogic operands inserted into IEC 61850 GSSE and GOOSE messages.
GE Multilin B30 Bus Differential System 1-3
Page 14

1.2 UR OVERVIEW 1 GETTING STARTED
The direct inputs and outputs provide a means of sharing digital point states between a number of UR-series IEDs over
dedicated fiber (single or multimode), RS422, or G.703 interface. No switching equipment is required as the IEDs are con-
1
nected directly in a ring or redundant (dual) ring configuration. This feature is optimized for speed and intended for pilotaided schemes, distributed logic applications, or the extension of the input/output capabilities of a single relay chassis.
1.2.3 UR SOFTWARE ARCHITECTURE
Firmware is the software embedded in the relay and is designed in functional modules that can be installed in any relay as
required. This is achieved with object-oriented design and programming (OOD/OOP) techniques.
Object-oriented techniques involve the use of objects and classes. An object is defined as “a logical entity that contains
both data and code that manipulates that data”. A class is the generalized form of similar objects. By using this concept,
one can create a protection class with the protection elements as objects of the class, such as time overcurrent, instantaneous overcurrent, current differential, undervoltage, overvoltage, underfrequency, and distance. These objects represent
completely self-contained software modules. The same object-class concept can be used for metering, input/output control,
software interface, communications, or any functional entity in the system.
Employing OOD/OOP in the software architecture of the B30 achieves the same features as the hardware architecture:
modularity, scalability, and flexibility. The application software for any UR-series device (for example, feeder protection,
transformer protection, distance protection) is constructed by combining objects from the various functional classes. This
results in a common interface across the UR series.
1-4 B30 Bus Differential System GE Multilin
Page 15

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
1.3ENERVISTA UR SETUP SOFTWARE 1.3.1 REQUIREMENTS
The relay front panel or the EnerVista UR Setup software can be used to communicate with the relay. The EnerVista UR
Setup software interface is the preferred method to edit settings and view actual values because the computer monitor can
display more information.
The minimum system requirements for the EnerVista UR Setup software are as follows:
• Pentium 4 (Core Duo recommended)
• Windows XP with Service Pack 2 (Service Pack 3 recommended), Windows 7, or Windows Server 2008 Release 2
64-bit
• 1 GB of RAM (2 GB recommended)
• 500 MB free hard drive space (1 GB recommended)
• 1024 x 768 display (1280 x 800 recommended)
•Serial port
• Ethernet port of the same type as one of the UR CPU ports or a LAN connection to the UR
• Internet access or a DVD drive
The following qualified modems have been tested to be compliant with the B30 and the EnerVista UR Setup software:
• US Robotics external 56K FaxModem 5686
• US Robotics external Sportster 56K X2
• PCTEL 2304WT V.92 MDC internal modem
1.3.2 SOFTWARE INSTALLATION
1
After ensuring that the requirements for using EnerVista UR Setup are met (previous section), install the EnerVista UR
Setup software from the GE EnerVista DVD. Or download the UR EnerVista software from
http://www.gedigitalenergy.com/multilin
If you are upgrading from version 7.0 or 7.1 to 7.2 or later, some CPU modules require a new boot version. Update this first
in EnerVista under Maintenance > Update Firmware.
To install the UR EnerVista software from the DVD:
1. Insert the GE EnerVista DVD into the DVD drive of your computer.
2. Click the Install Now button and follow the instructions.
3. When installation is complete, start the EnerVista Launchpad application.
4. Click the IED Setup section of the Launch Pad window.
FIGURE 1–3: ADDING UR DEVICE IN LAUNCHPAD WINDOW
5. In the EnerVista Launch Pad window, click the Add Product button and select the appropriate product, shown as fol-
lows. Select the Web option to ensure the most recent software release, or select CD if you do not have a web connec-
and install it.
GE Multilin B30 Bus Differential System 1-5
Page 16

1.3 ENERVISTA UR SETUP SOFTWARE 1 GETTING STARTED
tion, then click the Add Now button to list software items for the product. EnerVista Launchpad then obtains the
software from the Internet or DVD and automatically starts the installation program.
1
FIGURE 1–4: IDENTIFYING THE UR DEVICE TYPE
6. Select the complete path, including the new directory name, where the EnerVista UR Setup is to be installed.
7. Click the Next button to begin the installation. The files are installed in the directory indicated, and the installation program automatically creates icons and adds EnerVista UR Setup to the Windows start menu.
8. Click Finish to complete the installation. The UR device is added to the list of installed intelligent electronic devices
(IEDs) in the EnerVista Launchpad window, as shown.
FIGURE 1–5: UR DEVICE ADDED TO LAUNCHPAD WINDOW
1-6 B30 Bus Differential System GE Multilin
Page 17

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
1.3.3 CONFIGURING THE B30 FOR SOFTWARE ACCESS
A) OVERVIEW
You connect remotely to the B30 through the rear RS485 or Ethernet port with a computer running the EnerVista UR Setup
software. The B30 can also be accessed locally with a computer through the front panel RS232 port or the rear Ethernet
port using the Quick Connect feature.
• To configure the B30 for remote access via the rear RS485 port, see the Configuring Serial Communications section.
• To configure the B30 for remote access via the rear Ethernet port, see the Configuring Ethernet Communications sec-
tion.
• To configure the B30 for local access with a computer through either the front RS232 port or rear Ethernet port, see the
Using the Quick Connect Feature section.
B) CONFIGURING SERIAL COMMUNICATIONS
A computer with an RS232 port and a serial cable is required. To use the RS485 port at the back of the relay, a GE Multilin
F485 converter (or compatible RS232-to-RS485 converter) is required. See the F485 instruction manual for details.
1. Connect the computer to the F485 and the F485 to the RS485 terminal on the back of the UR device, or connect
directly the computer to the RS232 port on the front of the relay.
2. In the EnerVista Launchpad software on the computer, select the UR device to start the software.
3. Click the Device Setup button to open the Device Setup window, and click the Add Site button to define a new site.
4. Enter a site name in the Site Name field. Optionally add a short description of the site along with the display order of
devices defined for the site. This example uses “Location 1” as the site name. When done, click the OK button. The
new site appears in the upper-left list in the EnerVista UR Setup window.
5. Click the Device Setup button, then select the new site to re-open the Device Setup window.
6. Click the Add Device button to define the new device.
7. Enter a name in the "Device Name” field and a description (optional) of the site.
8. Select “Serial” from the Interface drop-down list. This displays a number of interface parameters that must be entered
for serial communications.
1
FIGURE 1–6: CONFIGURING SERIAL COMMUNICATIONS
GE Multilin B30 Bus Differential System 1-7
Page 18

1.3 ENERVISTA UR SETUP SOFTWARE 1 GETTING STARTED
9. Enter the COM port used by the computer, the baud rate, and parity settings from the front panel SETTINGS PRODUCT
1
SETUP COMMUNICATIONS SERIAL PORTS menu, and the relay slave address setting from the front panel SETTINGS
PRODUCT SETUP COMMUNICATIONS MODBUS PROTOCOL MODBUS SLAVE ADDRESS menu in their respective
fields.
10. Click the Read Order Code button to connect to the B30 device and upload the order code. If a communications error
occurs, ensure that the EnerVista UR Setup serial communications values entered in the previous step correspond to
the relay setting values.
11. Click the OK button when the relay order code has been received. The new device is added to the Site List window (or
Online window) located in the top left corner of the main EnerVista UR Setup window.
The device has now been configured for RS232 communications. Proceed to the Connecting to the B30 section to begin
communication.
C) CONFIGURING ETHERNET COMMUNICATIONS
Before starting, verify that the Ethernet network cable is properly connected to the Ethernet port on the back of the relay. To
setup the relay for Ethernet communications, you define a Site, then add the relay as a Device at that site.The computer
and UR device must be on the same subnet.
12. Select the “UR” device from the EnerVista Launchpad to start EnerVista UR Setup.
13. Click the Device Setup button to open the Device Setup window, then click the Add Site button to define a new site.
14. Enter the desired site name in the “Site Name” field. If desired, a short description of site can also be entered along
with the display order of devices defined for the site. In this example, we use “Location 2” as the site name. Click the
OK button when complete.
15. The new site appears in the upper-left list in the EnerVista UR Setup window. Click the Device Setup button then
select the new site to re-open the Device Setup window.
16. Click the Add Device button to define the new device.
17. Enter the desired name in the “Device Name” field and a description (optional) of the site.
18. Select “Ethernet” from the Interface drop-down list. This displays a number of interface parameters that must be
entered for proper Ethernet functionality.
FIGURE 1–7: CONFIGURING ETHERNET COMMUNICATIONS
1-8 B30 Bus Differential System GE Multilin
Page 19

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
19. Enter the relay IP address specified in the front panel SETTINGS PRODUCT SETUP COMMUNICATIONS NET-
WORK IP ADDRESS in the “IP Address” field.
20. Enter the relay slave address and Modbus port address values from the respective settings in the front panel SETTINGS
PRODUCT SETUP COMMUNICATIONS MODBUS PROTOCOL menu.
21. Click the Read Order Code button to connect to the B30 device and upload the order code. If an communications
error occurs, ensure that the three EnerVista UR Setup values entered in the previous steps correspond to the relay
setting values.
22. Click OK when the relay order code has been received. The new device is added to the Site List window (or Online
window) located in the top left corner of the main EnerVista UR Setup window.
The Site Device has now been configured for Ethernet communications. Proceed to the Connecting to the B30 section to
begin communications.
1.3.4 USING THE QUICK CONNECT FEATURE
A) USING QUICK CONNECT VIA THE FRONT PANEL RS232 PORT
Before starting, verify that the serial cable is properly connected from the computer to the front panel RS232 port with a
straight-through 9-pin to 9-pin RS232 cable.
1. Verify that the latest version of the EnerVista UR Setup software is installed (available from the GE EnerVista CD or
online from http://www.gedigitalenergy.com/multilin
2. Select the “UR” device from the EnerVista Launchpad to start EnerVista UR Setup.
3. Click the Quick Connect button to open the Quick Connect dialog box.
). See the Software Installation section if not already installed.
1
4. Select the Serial interface and the correct COM Port, then click Connect.
5. The EnerVista UR Setup software creates a site named “Quick Connect” with a corresponding device also named
“Quick Connect” and displays them at the upper-left of the screen. Expand the sections to view data directly from the
B30 device.
Each time that the EnerVista UR Setup software is initialized, click the Quick Connect button to establish direct communications to the B30 device. This ensures that configuration of the EnerVista UR Setup software matches the B30 model
number.
B) USING QUICK CONNECT VIA THE REAR ETHERNET PORTS
To use the Quick Connect feature to access the B30 from a computer through Ethernet, first assign an IP address to the
relay from the front panel keyboard.
1. Press the MENU key until the SETTINGS menu displays.
2. Navigate to the
3. Enter an IP address, for example “1.1.1.1,” and select the ENTER key to save the value.
4. In the same menu, select the SUBNET IP MASK setting.
5. Enter a subnet IP address, for example “255.0.0.0,” and press the ENTER key to save the value.
SETTINGS PRODUCT SETUP COMMUNICATIONS NETWORK IP ADDRESS setting.
GE Multilin B30 Bus Differential System 1-9
Page 20

1.3 ENERVISTA UR SETUP SOFTWARE 1 GETTING STARTED
842799A1.CDR
END 1 END 2
Pin Wire color Diagram Pin Wire color Diagram
1 White/orange 1 White/green
2 Orange 2 Green
3 White/green 3 White/orange
4 Blue 4 Blue
5 White/blue 5 White/blue
6 Green 6 Orange
7 White/brown 7 White/brown
8 Brown 8 Brown
1
2
3
4
5
6
7
8
Next, use an Ethernet cross-over cable to connect the computer to the rear Ethernet port. In case you need it, the figure
shows the pinout for an Ethernet cross-over cable.
1
FIGURE 1–8: ETHERNET CROSS-OVER CABLE PIN LAYOUT
Now, assign the computer an IP address compatible with the relay’s IP address.
1. From the Windows desktop, right-click the My Network Places icon and select Properties to open the network connections window.
2. Right-click the Local Area Connection icon and select Properties.
1-10 B30 Bus Differential System GE Multilin
Page 21

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
3. Select the Internet Protocol (TCP/IP) item from the list, and click the Properties button.
4. Click the “Use the following IP address” box.
5. Enter an IP address with the first three numbers the same as the IP address of the B30 relay and the last number dif-
ferent (in this example, 1.1.1.2).
6. Enter a subnet mask equal to the one set in the B30 (in this example, 255.0.0.0).
7. Click the OK button to save the values.
Before continuing, test the Ethernet connection.
1. Open a Windows console window by selecting Start > Run from the Windows Start menu and typing “cmd”.
2. Type the following command, substituting the IP address of 1.1.1.1 with yours:
C:\WINNT>ping 1.1.1.1
3. If the connection is successful, the system returns four replies similar to the following:
Pinging 1.1.1.1 with 32 bytes of data:
Reply from 1.1.1.1: bytes=32 time<10ms TTL=255
Reply from 1.1.1.1: bytes=32 time<10ms TTL=255
Reply from 1.1.1.1: bytes=32 time<10ms TTL=255
Reply from 1.1.1.1: bytes=32 time<10ms TTL=255
Ping statistics for 1.1.1.1:
Packets: Sent = 4, Received = 4, Lost = 0 (0% loss),
Approximate round trip time in milliseconds:
Minimum = 0ms, Maximum = 0ms, Average = 0 ms
4. Note that the values for time and TTL vary depending on local network configuration.
5. If the following sequence of messages appears when entering the
C:\WINNT>ping 1.1.1.1 command:
1
GE Multilin B30 Bus Differential System 1-11
Page 22

1.3 ENERVISTA UR SETUP SOFTWARE 1 GETTING STARTED
Pinging 1.1.1.1 with 32 bytes of data:
1
Request timed out.
Request timed out.
Request timed out.
Request timed out.
Ping statistics for 1.1.1.1:
Packets: Sent = 4, Received = 0, Lost = 4 (100% loss),
Approximate round trip time in milliseconds:
Minimum = 0ms, Maximum = 0ms, Average = 0 ms
Pinging 1.1.1.1 with 32 bytes of data:
verify the physical connection between the B30 and the computer, and double-check the programmed IP address in
PRODUCT SETUP COMMUNICATIONS NETWORK IP ADDRESS setting, then repeat step 2.
the
6. If the following sequence of messages appears when entering the
Pinging 1.1.1.1 with 32 bytes of data:
Hardware error.
Hardware error.
Hardware error.
Hardware error.
Ping statistics for 1.1.1.1:
Packets: Sent = 4, Received = 0, Lost = 4 (100% loss),
Approximate round trip time in milliseconds:
Minimum = 0ms, Maximum = 0ms, Average = 0 ms
Pinging 1.1.1.1 with 32 bytes of data:
verify the physical connection between the B30 and the computer, and double-check the programmed IP address in
PRODUCT SETUP COMMUNICATIONS NETWORK IP ADDRESS setting, then repeat step 2.
the
7. If the following sequence of messages appears when entering the
Pinging 1.1.1.1 with 32 bytes of data:
Destination host unreachable.
Destination host unreachable.
Destination host unreachable.
Destination host unreachable.
Ping statistics for 1.1.1.1:
Packets: Sent = 4, Received = 0, Lost = 4 (100% loss),
Approximate round trip time in milliseconds:
Minimum = 0ms, Maximum = 0ms, Average = 0 ms
Pinging 1.1.1.1 with 32 bytes of data:
verify the IP address is programmed in the local computer by entering the ipconfig command in the command window.
C:\WINNT>ping 1.1.1.1 command:
C:\WINNT>ping 1.1.1.1 command:
1-12 B30 Bus Differential System GE Multilin
Page 23

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
C:\WINNT>ipconfig
Windows IP Configuration
Ethernet adapter <F4FE223E-5EB6-4BFB-9E34-1BD7BE7F59FF>:
Connection-specific DNS suffix. . :
IP Address. . . . . . . . . . . . : 0.0.0.0
Subnet Mask . . . . . . . . . . . : 0.0.0.0
Default Gateway . . . . . . . . . :
Ethernet adapter Local Area Connection:
Connection-specific DNS suffix . :
IP Address. . . . . . . . . . . . : 1.1.1.2
Subnet Mask . . . . . . . . . . . : 255.0.0.0
Default Gateway . . . . . . . . . :
C:\WINNT>
Before using the Quick Connect feature through the Ethernet port, disable any configured proxy settings in Internet
Explorer.
1. Start the Internet Explorer software.
2. Select the Tools > Internet Options menu item and click the Connections tab.
3. Click on the LAN Settings button to open the following window.
1
4. Ensure that the “Use a proxy server for your LAN” box is not checked.
If this computer is used to connect to the Internet, re-enable any proxy server settings after the computer has been disconnected from the B30 relay.
1. Start the Internet Explorer software.
2. Select the “UR” device from the EnerVista Launchpad to start EnerVista UR Setup.
3. Click the Quick Connect button to open the Quick Connect dialog box.
4. Select the Ethernet interface and enter the IP address assigned to the B30, then click the Connect button. The
EnerVista UR Setup software creates a site named “Quick Connect” with a corresponding device also named “Quick
Connect” and displays them at the upper-left of the screen.
GE Multilin B30 Bus Differential System 1-13
Page 24

1.3 ENERVISTA UR SETUP SOFTWARE 1 GETTING STARTED
5. Expand the sections to view data directly from the B30 device.
Each time the EnerVista UR Setup software is initialized, click the Quick Connect button to establish direct communica-
1
tions to the B30. This ensures that configuration of the EnerVista UR Setup software matches the B30 model number.
When direct communications with the B30 via Ethernet is complete, make the following changes:
1. From the Windows desktop, right-click the My Network Places icon and select Properties to open the network connections window.
2. Right-click the Local Area Connection icon and select the Properties item.
3. Select the Internet Protocol (TCP/IP) item from the list provided and click the Properties button.
4. Set the computer to “Obtain a relay address automatically” as shown.
If this computer is used to connect to the Internet, re-enable any proxy server settings after the computer has been disconnected from the B30 relay.
AUTOMATIC DISCOVERY OF ETHERNET DEVICES
The EnerVista UR Setup software can automatically discover and communicate to all UR-series IEDs located on an Ethernet network.
Using the Quick Connect feature, a single click of the mouse triggers the software to automatically detect any UR-series
relays located on the network. The EnerVista UR Setup software then proceeds to configure all settings and order code
options in the Device Setup menu. This feature allows the user to identify and interrogate all UR-series devices at a location.
1.3.5 CONNECTING TO THE B30 RELAY
When unable to connect because of an "ACCESS VIOLATION," access Device Setup and refresh the order code for the
device.
1-14 B30 Bus Differential System GE Multilin
Page 25

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
842743A3.CDR
Communications status indicators:
Green = OK
Red = No communications
UR icon = report is open
Quick action hot links
Expand the site list by double-clicking
or selecting the +/– box.
NOTE
1. Open the Display Properties window through the Site List tree as shown. The Display Properties window opens with a
status indicator on the lower left of the EnerVista UR Setup window.
1
2. If the status indicator is red, verify that the Ethernet network cable is properly connected to the Ethernet port on the
back of the relay and that the relay has been properly setup for communications (steps A and B earlier).
If a relay icon appears in place of the status indicator, than a report (such as an oscillography or event record) is open.
Close the report to re-display the green status indicator.
3. The Display Properties settings can now be edited, printed, or changed.
See chapter 4 in this manual or the EnerVista UR Setup Help File for information about the using the EnerVista UR
Setup software interface.
QUICK ACTION HOT LINKS
The EnerVista UR Setup software has several quick action buttons to provide instant access to several functions that are
often performed when using B30 relays. From the online window, users can select the relay to interrogate from a pull-down
window, then click the button for the action they want to perform. The following quick action functions are available:
• View the B30 event record
• View the last recorded oscillography record
• View the status of all B30 inputs and outputs
• View all of the B30 metering values
• View the B30 protection summary
• Generate a service report
GE Multilin B30 Bus Differential System 1-15
Page 26

1.3 ENERVISTA UR SETUP SOFTWARE 1 GETTING STARTED
1.3.6 SETTING UP CYBERSENTRY AND CHANGING DEFAULT PASSWORD
1
If and when first using CyberSentry security, use the following procedure for set up.
1. Log in to the relay as Administrator by using the Value keys on the front panel or through EnerVista connected serially
(so that no IP address is required). If logging in through EnerVista choose Device authentication. Enter the default
password "ChangeMe1#". Note that the "Lock relay" setting needs to be disabled in the Security > Supervisory
menu. When this setting is disabled, configuration and firmware upgrade are possible. By default, this setting is disabled.
2. Enable the Supervisor role if you have a need for it.
3. Make any required changes in configuration, such as setting a valid IP address for communication over Ethernet.
4. Log out of the Administrator account by choosing None.
Next, device or server authentication can be chosen on the login screen, but the choice is available only in EnerVista. Use
device authentication to log in using the five pre-configured roles (Administrator, Supervisor, Engineer, Operator,
Observer). When using a serial connection, only device authentication is supported. When server authentication is
required, characteristics for communication with a RADIUS server must be configured on the UR. This is possible only
through the EnerVista software. The RADIUS server itself also must be configured. The appendix called RADIUS Server
gives an example of how to setup a simple RADIUS server. Once both the RADIUS server and the parameters for connecting UR to the server have been configured, you can choose server authentication on the login screen of EnerVista.
FIGURE 1–9: LOGIN SCREEN FOR CYBERSENTRY
During the commissioning phase, you have the option to bypass the use of passwords. Do so by enabling the Bypass
Access setting under
commissioning the device.
You can change the password for any role either from the front panel or through EnerVista.
1-16 B30 Bus Differential System GE Multilin
SETTINGS > PRODUCT SETUP > SECURITY > SUPERVISORY. Be sure to disable this bypass setting after
Page 27

1 GETTING STARTED 1.3 ENERVISTA UR SETUP SOFTWARE
If using EnerVista, navigate to Settings > Product Setup > Security. Change the Local Administrator Password, for
example. It is strongly recommended that the password for the Administrator be changed from the default. Changing the
passwords for the other three roles is optional.
FIGURE 1–10: CHANGING THE DEFAULT PASSWORD
1
GE Multilin B30 Bus Differential System 1-17
Page 28

1.4 UR HARDWARE 1 GETTING STARTED
EnerVista
Ethernet
10/100 Mbps
Regional
control
center
Modem
Remote
communications link
Local
control
Engineer
GE Multilin F485
communications converter
UR-series IED
Troubleshooting
Commissioning
Setting changes
Reports
RS485 115 kbps
RS232
EnerVista
EnerVista
842759A2.CDR
1.4UR HARDWARE 1.4.1 MOUNTING AND WIRING
1
See Chapter 3: Hardware for mounting and wiring instructions.
1.4.2 COMMUNICATIONS
The EnerVista UR Setup software communicates to the relay via the faceplate RS232 port or the rear panel RS485 / Ethernet ports. To communicate via the faceplate RS232 port, a standard straight-through serial cable is used. The DB-9 male
end is connected to the relay and the DB-9 or DB-25 female end is connected to the computer COM2 port as described in
the CPU communications ports section of chapter 3.
FIGURE 1–11: RELAY COMMUNICATION OPTIONS
To communicate through the B30 rear RS485 port from a computer RS232 port, the GE Multilin RS232/RS485 converter
box is required. This device (catalog number F485) connects to the computer using a straight-through serial cable. A
shielded twisted-pair (20, 22, or 24 AWG) connects the F485 converter to the B30 rear communications port. The converter
terminals (+, –, GND) are connected to the B30 communication module (+, –, COM) terminals. See the CPU communica-
tions ports section in chapter 3 for details. The line is terminated with an R-C network (that is, 120 Ω, 1 nF) as described in
the chapter 3.
All messages are displayed on a backlit liquid crystal display (LCD) to make them visible under poor lighting conditions.
While the keypad and display are not actively being used, the display defaults to user-defined messages. Any high-priority
event-driven message automatically overrides the default message and appears on the display.
1-18 B30 Bus Differential System GE Multilin
1.4.3 FACEPLATE DISPLAY
Page 29

1 GETTING STARTED 1.5 USING THE RELAY
1.5USING THE RELAY 1.5.1 FACEPLATE KEYPAD
Display messages are organized into pages under the following headings: actual values, settings, commands, and targets.
The MENU key navigates through these pages. Each heading page is divided further into logical subgroups.
The MESSAGE keys navigate through the subgroups. The VALUE keys increment or decrement numerical setting values
when in programming mode. These keys also scroll through alphanumeric values in the text edit mode. Alternatively, values can be entered with the numeric keypad.
The decimal key initiates and advances to the next character in text edit mode or enters a decimal point.
The HELP key can be pressed at any time for context-sensitive help messages.
The ENTER key stores altered setting values.
1.5.2 MENU NAVIGATION
Press the MENU key to select a header display page (top-level menu). The header title appears momentarily followed by a
header display page menu item. Each press of the MENU key advances through the following main heading pages:
• Actual values
• Settings
• Commands
• Targets
• User displays (when enabled)
1.5.3 MENU HIERARCHY
1
The setting and actual value messages are arranged hierarchically. The header display pages are indicated by double
scroll bar characters (), while sub-header pages are indicated by single scroll bar characters (). The header display
pages represent the highest level of the hierarchy and the sub-header display pages fall below this level. The MESSAGE
UP and DOWN keys move within a group of headers, sub-headers, setting values, or actual values. Continually pressing
the MESSAGE RIGHT key from a header display displays specific information for the header category. Conversely, continually pressing the MESSAGE LEFT key from a setting value or actual value display returns to the header display.
HIGHEST LEVEL LOWEST LEVEL (SETTING
VALUE )
SETTINGS
PRODUCT SETUP
SETTINGS
SYSTEM SETUP
The relay is in the default “Not Programmed” state when it leaves the factory. When powered up successfully, the Trouble
LED is on and the In Service LED off. The relay in the “Not Programmed” state blocks signaling of any output relay. These
conditions remain until the relay is explicitly put in the “Programmed” state.
Select the menu message
RELAY SETTINGS:
Not Programmed
SETTINGS PRODUCT SETUP INSTALLATION RELAY SETTINGS
SECURITY
ACCESS LEVEL:
Restricted
1.5.4 RELAY ACTIVATION
1. To put the relay in the “Programmed” state, press either of the VALUE keys once and then press ENTER. The faceplate Trouble LED turns off and the In Service LED turns on.
GE Multilin B30 Bus Differential System 1-19
Page 30

1.5 USING THE RELAY 1 GETTING STARTED
NOTE
The settings for the relay can be programmed manually (see Chapter 5) via the faceplate keypad or remotely via the
EnerVista UR Setup software (see the EnerVista UR Setup help file).
1
1.5.5 RELAY PASSWORDS
A) PASSWORD SECURITY
It is recommended that passwords be set for each security level and assigned to specific personnel. There are two user
security access levels, COMMAND and SETTING.
1. COMMAND
The COMMAND access level restricts the user from making any settings changes, but allows the user to perform the following operations:
• Change state of virtual inputs
• Clear event records
• Clear oscillography records
• Operate user-programmable pushbuttons
2. SETTING
The SETTING access level allows the user to make any changes to any of the setting values.
See the Changing Settings section in Chapter 4 for complete instructions on setting security-level passwords.
B) CYBERSENTRY
When the CyberSentry option is purchased, advanced security services are available, using either device authentication or
server authentication using RADIUS. When this option is purchased, the basic password security is disabled automatically.
For more information, see the CyberSentry content in the Security section of the next chapter.
1.5.6 FLEXLOGIC CUSTOMIZATION
FlexLogic equation editing is required for setting user-defined logic for customizing the relay operations. See the FlexLogic
section in Chapter 5.
1.5.7 COMMISSIONING
The B30 requires minimal maintenance after it is commissioned into service. Since the B30 is a microprocessor-based
relay, its characteristics do not change over time. As such, no further functional tests are required. Expected service life is
20 years for UR devices manufactured June 2014 or later when applied in a controlled indoors environment and electrical
conditions within specification.
The B30 performs a number of continual self-tests and takes the necessary action in case of any major errors (see the
Relay Self-tests section in chapter 7). However, it is recommended that B30 maintenance be scheduled with other system
maintenance. This maintenance can involve in-service, out-of-service, or unscheduled maintenance.
In-service maintenance:
1. Visual verification of the analog values integrity, such as voltage and current (in comparison to other devices on the
corresponding system).
2. Visual verification of active alarms, relay display messages, and LED indications.
3. LED test.
4. Visual inspection for any damage, corrosion, dust, or loose wires.
5. Event recorder file download with further events analysis.
Out-of-service maintenance:
1. Check wiring connections for firmness.
1-20 B30 Bus Differential System GE Multilin
Page 31

1 GETTING STARTED 1.5 USING THE RELAY
2. Analog values (currents, voltages, RTDs, analog inputs) injection test and metering accuracy verification. Calibrated
test equipment is required.
3. Protection elements setting verification (analog values injection or visual verification of setting file entries against relay
settings schedule).
4. Contact inputs and outputs verification. This test can be conducted by direct change of state forcing or as part of the
system functional testing.
5. Visual inspection for any damage, corrosion, or dust.
6. Event recorder file download with further events analysis.
7. LED Test and pushbutton continuity check.
Unscheduled maintenance, such as a disturbance causing system interruption:
1. View the event recorder and oscillography or fault report for correct operation of inputs, outputs, and elements.
If it is concluded that the relay or one of its modules is of concern, contact GE Multilin for service.
1
GE Multilin B30 Bus Differential System 1-21
Page 32

1
1.5 USING THE RELAY 1 GETTING STARTED
1-22 B30 Bus Differential System GE Multilin
Page 33

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
2 PRODUCT DESCRIPTION 2.1INTRODUCTION 2.1.1 OVERVIEW
The B30 Bus Differential System is a microprocessor-based relay that provides protection and metering for a busbar with
up to six feeders. Protection is provided by a low impedance percent differential element with features that make it immune
to CT saturation. Both biased (restrained) and unbiased (unrestrained) differential protection functions are provided.
A dynamic busbar replica mechanism is provided by associating the breaker and switch status signals with the differential
zone currents.
The biased bus differential function operates using both the differential and current directional comparison protection principles. The differential element uses a dual-slope dual-breakpoint characteristic with the restraining current formed as a maximum of the input currents for better stability during through-fault conditions and faster operation on internal faults. The
current directional comparison principle checks the angular relationship between the currents.
The biased bus differential protection operates in the two-out-of-two mode for low differential currents. This improves stability during CT saturation conditions caused by comparatively low currents combined with unfavorable phenomena such as
multiple auto-reclose actions. For high differential currents, the bus differential element operates using the differential characteristic alone if CT saturation is not detected. Upon CT saturation detection, the relay switches to the two-out-of-two
operating mode for better through fault stability.
The B30 typical operating time is about 12 ms for fast form-C output contacts and internal usage by user-programmable
logic, and about 15 ms for trip-rated form-A output contacts.
A CT failure alarm function that monitors the level of the differential current is provided. A situation when the differential current stays above a pre-defined level for a pre-defined period of time is declared as a CT trouble event, and an alarm is
raised. To prevent false tripping due to CT trouble, undervoltage supervision or an external check zone can be used.
Voltage and current metering is built into the relay as a standard feature. Current parameters are available as total waveform RMS magnitude, or as fundamental frequency only RMS magnitude and angle (phasor).
Diagnostic features include an event recorder capable of storing 1024 time-tagged events and oscillography capable of
storing up to 64 records with programmable trigger, content, and sampling rate. The internal clock used for time-tagging
can be synchronized with an IRIG-B signal, using the Simple Network Time Protocol (SNTP) over the Ethernet port, or
using the Precision Time Protocol (PTP). This precise time stamping allows the sequence of events to be determined
throughout the system. Events can also be programmed (via FlexLogic equations) to trigger oscillography data capture that
can be set to record the measured parameters before and after the event for viewing on a computer. These tools significantly reduce troubleshooting time and simplify report generation in the event of a system fault.
Several options are available for communication. A faceplate RS232 port can be used to connect to a computer for the programming of settings and the monitoring of actual values. The RS232 port has a fixed baud rate of 19.2 kbps. The rear
RS485 port allows independent access by operating and engineering staff. It can be connected to system computers with
baud rates up to 115.2 kbps. All serial ports use the Modbus RTU protocol. The 100Base-FX or 100Base-T Ethernet interface provides fast, reliable communications in noisy environments. The Ethernet port supports IEC 61850, Modbus/TCP,
TFTP protocols, PTP (according to IEEE Std. 1588-2008 or IEC 61588), and allows access to the relay via any standard
web browser (B30 web pages). The IEC 60870-5-104 protocol is supported on the Ethernet port, and DNP 3.0 and IEC
60870-5-104 cannot be enabled at the same time. The Ethernet port also supports the Parallel Redundancy Protocol (PRP)
of IEC 62439-3 (clause 4, 2012) when purchased as an option.
Settings and actual values can be accessed from the front panel or EnerVista software.
The B30 IEDs use flash memory technology that allows field upgrading as new features are added. The following Single
line diagram illustrates the relay functionality using American National Standards Institute (ANSI) device numbers.
2
GE Multilin B30 Bus Differential System 2-1
Page 34

2.1 INTRODUCTION 2 PRODUCT DESCRIPTION
$(&'5
3
1
%UHDNHUSRVLWLRQDQGWULS
0HWHULQJFXUUHQW
YROWDJHDQGIUHTXHQF\
1
=RQH
=RQH
%
%XV'LIIHUHQWLDO6\VWHP
%
%
*
*
3
1
1
*
*
%)
%)
3
1
1
*
*
%)
3
1
1
*
*
%)
3 3 3 3
Table 2–1: ANSI DEVICE NUMBERS AND FUNCTIONS
2
DEVICE
NUMBER
27P Phase undervoltage 51G Ground time overcurrent
50BF Breaker failure 51N Neutral time overcurrent
50G Ground instantaneous overcurrent 51P Phase time overcurrent
50N Neutral instantaneous overcurrent 59N Neutral overvoltage
50P Phase instantaneous overcurrent 59X Auxiliary overvoltage
50/74 CT trouble 87B Restrained bus differential
50/87 Unrestrained bus differential
FUNCTION DEVICE
NUMBER
FUNCTION
Figure 2–1: SINGLE LINE DIAGRAM
2-2 B30 Bus Differential System GE Multilin
Page 35

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
Table 2–2: OTHER DEVICE FUNCTIONS
FUNCTION FUNCTION FUNCTION
Breaker control Event recorder Teleprotection inputs and outputs
Breaker flashover FlexElements™ (8) Thermal overload protection
Contact inputs (up to 96) FlexLogic equations Time synchronization over IRIG-B or
IEEE 1588
Contact outputs (up to 64) IEC 61850 communications (optional) Time synchronization over SNTP
Control pushbuttons Metering: current, voltage, frequency Transducer inputs and outputs
CyberSentry™ security Modbus communications User-definable displays
Digital counters (8) Modbus user map User-programmable fault reports
Digital elements (48) Non-volatile latches User-programmable LEDs
Direct inputs and outputs (32) Non-volatile selector switch User-programmable pushbuttons
Disconnect switches Oscillography User-programmable self-tests
DNP 3.0 or IEC 60870-5-104 protocol Selector switch Virtual inputs (64)
Ethernet Global Data protocol (optional) Setting groups (6) Virtual outputs (96)
2.1.2 SECURITY
The following security features are available:
• Password security — Basic security present in the default offering of the product
• EnerVista security — Role-based access to various EnerVista software screens and configuration elements. The fea-
ture is available in the default offering of the product and only in the EnerVista software.
• CyberSentry security — Advanced security options available as a software option. When purchased, the options are
automatically enabled, and the default Password security and EnerVista security are disabled.
Changing the password, or any other setting, does not take the relay out of service. The relay is taken out of service when
a settings file is written to it.
a) ENERVISTA SECURITY
The EnerVista security management system is a role-based access control (RBAC) system that allows an administrator to
manage the privileges of multiple users. This allows for access control of UR devices by multiple personnel within a substation and conforms to the principles of RBAC as defined in ANSI INCITS 359-2004. The EnerVista security management
system is disabled by default to allow the administrator direct access to the EnerVista software after installation. It is recommended that security be enabled before placing the device in service.
Basic password or enhanced CyberSentry security applies, depending on purchase.
2
b) PASSWORD SECURITY
Password security is a basic security feature present in the default offering of the product.
Two levels of password security are provided: command and setting.
The following operations are under command password supervision:
• Changing the state of virtual inputs
• Clearing the event records
• Clearing the oscillography records
• Changing the date and time
• Clearing the data logger
• Clearing the user-programmable pushbutton states
The following operations are under setting password supervision:
• Changing any setting
GE Multilin B30 Bus Differential System 2-3
Page 36

2.1 INTRODUCTION 2 PRODUCT DESCRIPTION
842838A2.CDR
Administrator
Engineer
Supervisor
Operator
Observer
• Test mode operation
The B30 supports password entry from a local or remote connection. Local access is defined as any access to settings or
commands via the faceplate interface. This includes both keypad entry and the through the faceplate RS232 port. Remote
access is defined as any access to settings or commands via any rear communications port. This includes both Ethernet
and RS485 connections. Any changes to the local or remote passwords enables this functionality.
When entering a settings or command password via EnerVista or any serial interface, the user must enter the corresponding connection password. If the connection is to the back of the B30, the remote password must be used. If the connection
2
is to the RS232 port of the faceplate, the local password applies.
Password access events are logged in the Event Recorder.
c) CYBERSENTRY SECURITY
CyberSentry Embedded Security is a software option that provides advanced security services. When this option is purchased, the basic password security is disabled automatically.
CyberSentry provides security through the following features:
• An Authentication, Authorization, Accounting (AAA) Remote Authentication Dial-In User Service (RADIUS) client that
is centrally managed, enables user attribution, provides accounting of all user activities, and uses secure standardsbased strong cryptography for authentication and credential protection.
• A Role-Based Access Control (RBAC) system that provides a permission model that allows access to UR device operations and configurations based on specific roles and individual user accounts configured on the AAA server (that is,
Administrator, Supervisor, Engineer, Operator, Observer).
• Security event reporting through the Syslog protocol for supporting Security Information Event Management (SIEM)
systems for centralized cybersecurity monitoring.
• Strong encryption of all access and configuration network messages between the EnerVista software and UR devices
using the Secure Shell (SSH) protocol, the Advanced Encryption Standard (AES), and 128-bit keys in Galois Counter
Mode (GCM) as specified in the U.S. National Security Agency Suite B extension for SSH and approved by the
National Institute of Standards and Technology (NIST) FIPS-140-2 standards for cryptographic systems.
Example: Administrative functions can be segmented away from common operator functions, or engineering type access,
all of which are defined by separate roles, as shown in the following figure, so that access of UR devices by multiple personnel within a substation is allowed. Permission for each role are outlined in the next section.
Figure 2–2: CYBERSENTRY USER ROLES
There are two types of authentication supported by CyberSentry that can be used to access the UR device:
• Device Authentication (local UR device authenticates)
• Server Authentication (RADIUS server authenticates)
The EnerVista software allows access to functionality that is determined by the user role, which comes either from the local
UR device or RADIUS server.
2-4 B30 Bus Differential System GE Multilin
Page 37

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
The EnerVista software has a device authentication option on the login screen for accessing the UR device. When the
"Device" button is selected, the UR uses its local authentication database and not the RADIUS server to authenticate the
user. In this case, it uses its built-in roles (Administrator, Engineer, Supervisor, Observer, Operator) as login names and the
associated passwords are stored on the UR device. As such, when using the local accounts, access is not user-attributable.
In cases where user attributable access is required especially to facilitate auditable processes for compliance reasons, use
RADIUS authentication only.
When the "Server" Authentication Type option is selected, the UR uses the RADIUS server and not its local authentication
database to authenticate the user.
No password or security information are displayed in plain text by the EnerVista software or UR device, nor are they ever
transmitted without cryptographic protection.
CYBERSENTRY USER ROLES
CyberSentry user roles (Administrator, Engineer, Operator, Supervisor, Observer) limit the levels of access to various UR
device functions. This means that the EnerVista software allows for access to functionality based on the user’s logged in
role.
Example: Observer cannot write any settings.
The table lists the roles that are supported and their corresponding capabilities.
Table 2–3: PERMISSIONS BY USER ROLE FOR CYBERSENTRY
Roles Administrator Engineer Operator Supervisor Observer
Complete access Complete access
Device Definition RRRRR
Settings
|------------ Product Setup
|--------------- Security (CyberSentry) RW R R R R
|--------------- Supervisory see table notes R R see table notes R
|--------------- Display Properties RW RW R R R
|---------------
|--------------- Communications RW RW R R R
|--------------- Modbus user map RW RW R R R
|--------------- Real Time Clock RW RW R R R
|--------------- Oscillography RW RW R R R
|--------------- Data Logger RW RW R R R
|--------------- Demand RW RW R R R
|---------------
|---------------
|--------------- Control Pushbuttons RW RW R R R
|---------------
|--------------- Flex states RW RW R R R
|---------------
|--------------- Direct I/O RW RW R R R
|--------------- Tele-protection RW RW R R R
|--------------- Installation RW RW R R R
|------------ System Setup RW RW R R R
Clear relay records
(settings) RW RW R R R
User Programmable
LEDs RW RW R R R
User Programmable
self test RW RW R R R
User programmable
Pushbuttons RW RW R R R
User definable displays RW RW R R R
except for
CyberSentry
Security
Command
menu
Authorizes
writing
Default role
2
GE Multilin B30 Bus Differential System 2-5
Page 38

2
2.1 INTRODUCTION 2 PRODUCT DESCRIPTION
Roles Administrator Engineer Operator Supervisor Observer
|------------ FlexLogic RW RW R R R
|------------ Grouped Elements RW RW R R R
|------------ Control Elements RW RW R R R
|------------ Inputs / Outputs RW RW R R R
|--------------- Contact Input RW RW R R R
|---------------
|--------------- Virtual Inputs RW RW R R R
|--------------- Contact Output RW RW R R R
|--------------- Virtual Output RW RW R R R
|--------------- Remote Devices RW RW R R R
|--------------- Remote Inputs RW RW R R R
|--------------- Remote DPS input RW RW R R R
|---------------
|---------------
|--------------- Resetting RW RW R R R
|--------------- Direct Inputs RW RW R R R
|--------------- Direct Outputs RW RW R R R
|--------------- Teleprotection RW RW R R R
|--------------- Direct Analogs RW RW R R R
|--------------- Direct Integers RW RW R R R
|---------------
|---------------
|------------ Transducer I/O RW RW R R R
|------------ Testing RW RW R R R
|------------ Front Panel Labels Designer NA NA NA NA NA
|------------ Protection Summary NA NA NA NA NA
Commands RW RW RW R R
|------------ Virtual Inputs RW RW RW R R
|------------ Clear Records RW RW RW R R
|------------ Set date and time RW RW RW R R
User Displays RRRRR
Targets RRRRR
Actual Values RRRRR
|------------ Front Panel Labels Designer R R R R R
|------------ Status R R R R R
|------------ Metereing R R R R R
|------------ Transducer I/O R R R R R
|------------ Records R R R R R
|------------ Product Info R R R R R
Maintenance RW RW R R R
|------------ Modbus Analyzer NA NA NA NA NA
|------------ Change Front Panel RW RW RW R R
|------------ Update Firmware Yes No No No No
|------------ Retrieve File Yes No No No No
Contact Input threshold RW RW R R R
Remote Output DNA
Bit Pair RW RW R R R
Remote Output user
Bit Pair RW RW R R R
IEC61850 GOOSE
Analogs RW RW R R R
IEC61850 GOOSE
Integers RW RW R R R
2-6 B30 Bus Differential System GE Multilin
Page 39

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
NOTE
Table Notes:
1. RW = read and write access
2. R = read access
3. Supervisor = RW (default), Administrator = R (default), Administrator = RW (only if Supervisor role is disabled)
4. NA = the permission is not enforced by CyberSentry Security
CYBERSENTRY SERVER AUTHENTICATION
The UR has been designed to automatically direct authentication requests based on user names. In this respect, local
account names on the UR are considered as reserved, and not used on a RADIUS server.
The UR automatically detects whether an authentication request is to be handled remotely or locally. As there are only five
local accounts possible on the UR, if the user ID credential does not match one of the five local accounts, the UR automatically forwards the request to a RADIUS server when one is provided.
If a RADIUS server is provided, but is unreachable over the network, server authentication requests are denied. In this situation, use local UR accounts to gain access to the UR system.
2.1.3 ORDERING
a) OVERVIEW
The B30 is available as a 19-inch rack horizontal mount or reduced-size (¾) vertical unit and consists of the following modules: power supply, CPU, CT/VT, contact input and output, transducer input and output, and inter-relay communications.
Each of these modules can be supplied in a number of configurations specified at the time of ordering. The information
required to completely specify the relay is provided in the following tables (see chapter 3 for full details of relay modules).
Order codes are subject to change without notice. See the ordering page at
http://www.gedigitalenergy.com/multilin/order.htm for the latest options.
2
The order code structure is dependent on the mounting option (horizontal or vertical) and the type of CT/VT modules
(enhanced diagnostic CT/VT modules or HardFiberTM process bus modules). The order code options are described in the
following sub-sections.
b) ORDER CODES WITH ENHANCED CT/VT MODULES
The order codes for the horizontal mount units are shown below.
Table 2–4: B30 ORDER CODES FOR HORIZONTAL UNITS
BASE UNIT B30 | | | | | | | | | | | | Base Unit
CPU T | | | | | | | | | | | RS485 with 3 100Base-FX Et hernet, multimode, SFP with LC
SOFTWARE 00 | | | | | | | | | | No software options
B30 - * ** - * * * - F ** - H ** - L ** - N ** - S ** - U ** - W/X ** Full Size Horizontal Mount
U | | | | | | | | | | | RS485 w ith 1 100Base-T Ethernet, SFP RJ-45 + 2 100Base-FX Ethernet, multimode, SFP with LC
V | | | | | | | | | | | RS485 with 3 100Base-T Ethernet, SFP with R J-45
01 | | | | | | | | | | Ethernet Global Data (EGD) protocol
03 | | | | | | | | | | IEC 61850 protocol
04 | | | | | | | | | | IEC 61850 and Ethernet Global Data (EGD) protocols
A0 | | | | | | | | | | CyberSentry Lvl 1
A1 | | | | | | | | | | CyberSentry Lvl 1 and Ethernet Global Data
A3 | | | | | | | | | | CyberSentry Lvl 1 and IEC 61850
A4 | | | | | | | | | | CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
B0 | | | | | | | | | | IEEE 1588
B1 | | | | | | | | | | IEEE 1588 and Ethernet Global Data
B3 | | | | | | | | | | IEEE 1588 and IEC 61850
B4 | | | | | | | | | | IEEE 1588, Ethernet Global Data, and IEC 61850
C0 | | | | | | | | | | Parallel Redundancy Protocol (PRP)
C1 | | | | | | | | | | PRP and Ethernet Global Data
C3 | | | | | | | | | | PRP and IEC 61850
C4 | | | | | | | | | | PRP, Ethernet Global Data, and IEC 61850
D0 | | | | | | | | | | IEEE 1588 and CyberSentry Lvl 1
D1 | | | | | | | | | | IEEE 1588, CyberSentry Lvl 1, and Ethernet Global Data
D3 | | | | | | | | | | IEEE 1588, CyberSentry Lvl 1, and IEC 61850
D4 | | | | | | | | | | IEEE 1588, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
E0 | | | | | | | | | | IEEE 1588 and PRP
E1 | | | | | | | | | | IEEE 1588, PRP, and Ethernet Global Dada
E3 | | | | | | | | | | IEEE 1588, PRP, and IEC 61850
E4 | | | | | | | | | | IEEE 1588, PRP, Ethernet Global Data, and IEC 61850
F0 | | | | | | | | | | PRP and CyberSentry Lvl1
F1 | | | | | | | | | | PRP, CyberSentry Lvl1, and Ethernet Global Data
F3 | | | | | | | | | | PRP, CyberSentry Lvl 1, and IEC 61850
F4 | | | | | | | | | | PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
G0 | | | | | | | | | | IEEE 1588, PRP, and CyberSentry Lvl 1
G1 | | | | | | | | | | IEEE 1588, PRP, CyberSentry Lvl 1, Ethernet Global Data
G3 | | | | | | | | | | IEEE 1588, PRP, CyberSentry Lvl 1, and IEC 61850
G4 | | | | | | | | | | IEEE 1588, PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
GE Multilin B30 Bus Differential System 2-7
Page 40

2.1 INTRODUCTION 2 PRODUCT DESCRIPTION
Table 2–4: B30 ORDER CODES FOR HORIZONTAL UNITS
BASE UNIT B30 | | | | | | | | | | | | Base Unit
MOUNT/COATING H | | | | | | | | | Horizontal (19” rack)
FACEPLATE/ DISPLAY C | | | | | | | | English display
2
POWER SUPPLY
(redundant supply must
be same type as main supply)
ENHANCED DIAGNOSTICS CT/VT DSP | | XX | XX | | None (slots L and S only)
(requires all DSP to be enhanced diagnostic) 8L | 8L | 8L | | Standard 4CT/4VT with enhanced diagnostics
CONTACT INPUTS/OUTPUTS XX XX XX XX XX | No Module
TRANSDUCER
INPUTS/OUTPUTS
(select a maximum of 3 per unit)
INTER-RELAY
COMMUNICATIONS
(select a maximum of 1 per unit)
B30 - * ** - * * * - F ** - H ** - L ** - N ** - S ** - U ** - W/X ** Full Size Horizontal Mount
A | | | | | | | | | Horizontal (19” rack) with harsh-envir onmental coating
D | | | | | | | | French display
R | | | | | | | | Russian display
A | | | | | | | | C hinese display
P | | | | | | | | En glish display with 4 small and 12 large programmable pushbuttons
G | | | | | | | | French display with 4 small and 12 large programmable pushbuttons
S | | | | | | | | R ussian display with 4 small and 12 large programmable pushbuttons
B | | | | | | | | C hinese display with 4 small and 12 large programmable pushbuttons
K | | | | | | | | Enhanced front panel with English display
M | | | | | | | | En hanced front panel with French display
Q | | | | | | | | Enhanced front panel with Russian display
U | | | | | | | | Enhanced fr ont panel with Chinese display
L | | | | | | | | Enhanced front panel with English display and user-programmable pushbuttons
N | | | | | | | | Enhanced front panel w ith French display and user-programmable pushbuttons
T | | | | | | | | Enhanced front panel with Russian display and user-programmable pushbuttons
V | | | | | | | | Enhanced front panel with Chinese display and user-programmable pushbuttons
W | | | | | | | | Enhanced front panel with Turkish display
Y | | | | | | | | Enhanced front panel with Turkish display and user-programmable pushbuttons
H | | | | | | | 125 / 250 V AC/DC power supply
H | | | | | | RH 125 / 250 V AC/DC with redundant 1 25 / 250 V AC/DC power supply
L | | | | | | | 24 to 48 V (DC only) power supply
L | | | | | | RL 24 to 48 V (DC only) with redundant 24 to 48 V DC power supply
8M | 8M | 8M | | Sensitive ground 4CT/4VT w ith enhanced diagnostics
8N | 8N | 8N | | Standard 8CT with enhanced diagnostics
8R | 8R | 8R | | Sensi tive ground 8CT with enhanced diagnostics
4A 4A 4A 4A 4A | 4 Solid-State (no monitoring) MOSFET outputs
4B 4B 4B 4B 4B | 4 Solid-State (voltage with optional current) MOSFET outputs
4C 4C 4C 4C 4C | 4 Solid-State (current with optional voltage) MOSFET outputs
4D 4D 4D 4D 4D | 16 contact inputs with Auto-Burnishing
4L 4L 4L 4L 4L | 14 Form-A (no monitoring) Latching outputs
67 67 67 67 67 | 8 Form-A (no monitoring) outputs
6A 6A 6A 6A 6A | 2 Form-A (voltage with optional current) and 2 Fo rm-C outputs, 8 contact inputs
6B 6B 6B 6B 6B | 2 Form-A (voltage with optional current) and 4 Fo rm-C outputs, 4 contact inputs
6C 6C 6C 6C 6C | 8 Form-C outputs
6D 6D 6D 6D 6D | 16 contact inputs
6E 6E 6E 6E 6E | 4 Form-C outputs, 8 contact inputs
6F 6F 6F 6F 6F | 8 Fast Form-C outputs
6G 6G 6G 6G 6G | 4 Form-A (voltage with optional current) outputs, 8 contact inputs
6H 6H 6H 6H 6H | 6 Form-A (voltage with optional current) outputs, 4 contact inputs
6K 6K 6K 6K 6K | 4 Form-C and 4 Fast Form-C outputs
6L 6L 6L 6L 6L | 2 Form-A (current with optional voltage) and 2 Form-C outputs, 8 con tact inputs
6M 6M 6M 6M 6M | 2 Form-A (current with optional voltage) and 4 Form-C outputs, 4 contact inputs
6N 6N 6N 6N 6N | 4 Form-A (current with optional voltage) outputs, 8 contact inputs
6P 6P 6P 6P 6P | 6 Form-A (current with optional voltage) outputs, 4 contact inputs
6R 6R 6R 6R 6R | 2 Form-A (no monitoring) and 2 Form-C outputs, 8 contact inputs
6S 6S 6S 6S 6S | 2 Form-A (no monitoring) and 4 Form-C outpu ts, 4 contact inputs
6T 6T 6T 6T 6T | 4 Form-A (no monitoring) outputs, 8 contact inputs
6U 6U 6U 6U 6U | 6 Form-A (no monitoring) outputs, 4 contact inputs
6V 6V 6V 6V 6V | 2 Form-A outputs, 1 Form-C output, 1 Fo rm-A latching output, 8 contact inputs
5A 5A 5A 5A 5A | 4 DCmA inputs, 4 DCmA outputs (only one 5A module is allowed)
5C 5C 5C 5C 5C | 8 RTD inputs
5D 5D 5D 5D 5D | 4 RTD inputs, 4 DCmA outputs (only one 5D module is allowed)
5E 5E 5E 5E 5E | 4 RTD inputs, 4 DCmA inputs
5F 5F 5F 5F 5F | 8 DCmA inputs
2A C37.94SM, 1300nm single-mode, ELED, 1 channel single-mode
2B C37.94SM, 1300nm single-mode, ELED, 2 channel single-mode
2E Bi-phase, single channel
2F Bi-phase, dual channel
2G IE EE C37.94, 820 nm, 128 kbps, multimode, LED, 1 Channel
2H IEEE C37.94, 820 nm, 128 kbps, multimode, LED, 2 Channels
72 1550 nm, single-mode, LASER, 1 Channel
73 1550 nm, single-mode, LASER, 2 Channel
74 Channel 1 - RS422; Channel 2 - 155 0 nm, single-mode, LASER
75 Channel 1 - G.703; Channel 2 - 1550 nm, Single-mode LASER
76 IEEE C37.94, 820 nm, 64 kbps, multimode, LE D, 1 Channel
77 IEEE C37.94, 820 nm, 64 kbps, multimode, LE D, 2 Channels
7A 820 nm, multi-mode, LED, 1 Channel
7B 1300 nm, multi-mode, LED, 1 Channel
7C 1300 nm, single-mode, ELED, 1 Channel
7D 1300 nm, single-mode, LASER, 1 Channel
7E Channel 1 - G.703; Channel 2 - 820 nm, multi-mode
7F Channel 1 - G.703; Channel 2 - 1300 nm, multi-mode
7G Channel 1 - G.703; Channel 2 - 1300 nm, single-mode ELED
7H 820 nm, multi-mode, LED, 2 Channels
7I 1300 nm, multi-mode, LED, 2 Channels
7J 1300 nm, single-mode, ELED, 2 Channels
7K 1300 nm, single-mode, LASER, 2 Channels
7L Channel 1 - RS422; Channel 2 - 820 nm, multi-mode, LED
7M Channel 1 - RS422; C hannel 2 - 1300 nm, multi-mode, LED
7N Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, ELED
7P Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, LASER
7Q Channel 1 - G.703; Channel 2 - 1300 nm, single-mode LASER
7R G.703, 1 Channel
7S G.703, 2 Channels
7T RS422, 1 Channel
7W RS422, 2 Channels
2-8 B30 Bus Differential System GE Multilin
Page 41

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
The order codes for the reduced size vertical mount units are shown below.
Table 2–5: B30 ORDER CODES (REDUCED SIZE VERTICAL UNITS)
BASE UNIT B30 | | | | | | | | | | Base Unit
CPU T | | | | | | | | | RS485 with 3 100Base-FX Ethernet, multimode, SFP with LC
SOFTWARE 00 | | | | | | | | No software options
MOUNT/COATING V | | | | | | | Vertical (3/4 rack)
FACEPLATE/ DISPLAY F | | | | | | English display
POWER SUPPLY H | | | | | 125 / 250 V AC/DC power supply
ENHANCED DIAGNOSTICS CT/VT DSP
(requires all DSP to be enhanced diagnostic)
CONTACT INPUTS/OUTPUTS XX XX XX | No Module
TRANSDUCER
INPUTS/OUTPUTS
(select a maximum of 3 per unit)
INTER-RELAY
COMMUNICATIONS
(select a maximum of 1 per unit)
B30 - * ** - * * * - F ** - H ** - L ** - N ** - R ** Reduced Size Vertical Mount
U | | | | | | | | | RS485 with 1 100Base-T Ethernet, SFP RJ-45 + 2 100Base-FX Ethernet, multimode, SFP with LC
V | | | | | | | | | RS485 with 3 100Base-T Ethernet, SFP with RJ-45
01 | | | | | | | | Ethernet Global Data (EGD) protocol
03 | | | | | | | | IEC 61850 protocol
04 | | | | | | | | IEC 61850 and Ethernet Global Data (EGD) protocols
A0 | | | | | | | | CyberSentry Lvl 1
A1 | | | | | | | | CyberSentry Lvl 1 and Etherne t Global Data
A3 | | | | | | | | CyberSentry Lvl 1 and IEC 61850
A4 | | | | | | | | CyberSentry Lvl 1, Et hernet Global Data, and IEC 61850
B0 | | | | | | | | IEEE 1588
B1 | | | | | | | | IEEE 1588 and Ethernet Global Data
B3 | | | | | | | | IEEE 1588 and IEC 61850
B4 | | | | | | | | IEEE 1588, Ethernet Global Data, and IEC 61850
C0 | | | | | | | | Parallel Redundancy Protocol (PRP)
C1 | | | | | | | | PRP and Ethernet Global Data
C3 | | | | | | | | PRP and IEC 61850
C4 | | | | | | | | PRP, Ethernet Global Data, and IEC 61850
D0 | | | | | | | | IEEE 1588 and CyberS entry Lvl 1
D1 | | | | | | | | IEEE 1588, CyberS entry Lvl 1, and Ethernet Global Data
D3 | | | | | | | | IEEE 1588, CyberS entry Lvl 1, and IEC 61850
D4 | | | | | | | | IEEE 1588, CyberS entry Lvl 1, Ethernet Global Data, and IEC 61850
E0 | | | | | | | | IEEE 1588 and PRP
E1 | | | | | | | | IEEE 1588, PRP, and Ethernet Global Dada
E3 | | | | | | | | IEEE 1588, PRP, and IEC 61850
E4 | | | | | | | | IEEE 1588, PRP, Ethernet Global Data, and IEC 61850
F0 | | | | | | | | PRP and CyberSentry Lvl1
F1 | | | | | | | | PR P, CyberSentry Lvl1, and Ethernet Global Data
F3 | | | | | | | | PRP, CyberSentry Lvl 1, and IEC 61850
F4 | | | | | | | | PR P, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
G0 | | | | | | | | IEEE 1588, PRP, and CyberSentry Lvl 1
G1 | | | | | | | | IEEE 1588, PRP, CyberSentry Lvl 1, Ethernet Global Data
G3 | | | | | | | | IEEE 1588, PRP, CyberSentry Lvl 1, and IEC 61850
G4 | | | | | | | | IEEE 1588, PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
B | | | | | | | Vertical (3/4 rack) with harsh-environmental coating
K | | | | | | Enhanced front panel with English display
M | | | | | | Enhanced front panel with French display
Q | | | | | | Enhanced front panel with Russian display
U | | | | | | Enhanced front panel with Chinese display
L | | | | | | Enhanced front panel with English display and user-programmable pushbuttons
N | | | | | | Enhanced front panel with French display and user-programmable pushbuttons
T | | | | | | Enhanced front panel with Russian display and user-programmable pushbuttons
V | | | | | | Enhanced front panel with Chinese display and user-progr ammable pushbuttons
W | | | | | | Enhanced front panel with Turkish display
Y | | | | | | Enhanced front panel with Turkish display and user-programmable pushbuttons
L | | | | | 24 to 48 V (DC only) power supply
XX | XX | | None (slots L and S only)
8L | 8L | | Standard 4CT/4VT with enhanced diagnostics
8M | 8M | | Sensitive ground 4CT/4VT with enhanced diagnostics
8N | 8N | | Standard 8CT with enhanced diagnostics
8R | 8R | | Sensitive groun d 8CT with enhanced diagnostics
4A 4A 4A | 4 Solid-State (no monitoring) MOSFET outputs
4B 4B 4B | 4 Solid-State (voltage with optional current) MOSFET outputs
4C 4C 4C | 4 Solid-State (current with optional voltage) MOSFET outputs
4D 4D 4D | 16 contact inputs with Auto-Burnishing
4L 4L 4L | 14 Form-A (no monitoring) Latching outputs
67 67 67 | 8 Form-A (no monitoring) out puts
6A 6A 6A | 2 Form-A (voltage with optional current) and 2 Form-C outputs, 8 contact inputs
6B 6B 6B | 2 Form-A (voltage with optional current) and 4 Form-C outputs, 4 contact inputs
6C 6C 6C | 8 Form-C outputs
6D 6D 6D | 16 contact inputs
6E 6E 6E | 4 Form-C outputs, 8 contact inputs
6F 6F 6F | 8 Fast Form-C outputs
6G 6G 6G | 4 Form-A (voltage with optional current) outputs, 8 contact inputs
6H 6H 6H | 6 Form-A (voltage with optional current) outputs, 4 contact inputs
6K 6K 6K | 4 Form-C and 4 Fast Form-C outputs
6L 6L 6L | 2 Form-A (current with optional voltage) and 2 Form-C outputs, 8 contact inputs
6M 6M 6M | 2 Form-A (current with optional voltage) and 4 Form-C o utputs, 4 contact inputs
6N 6N 6N | 4 Form-A (current with optional voltage) outputs, 8 contact inputs
6P 6P 6P | 6 Form-A (current with optional voltage) outputs, 4 contact inputs
6R 6R 6R | 2 Form-A (no monitoring) and 2 Form-C outputs, 8 contact inputs
6S 6S 6S | 2 Form-A (no monitoring) and 4 Form-C outputs, 4 contact inputs
6T 6T 6T | 4 Form-A (no monitoring) outputs, 8 contact inputs
6U 6U 6U | 6 Form-A (no monitoring) outputs, 4 contact inputs
6V 6V 6V | 2 Form-A outputs, 1 Form-C output, 1 Form-A latching output, 8 contact inputs
5A 5A 5A | 4 DCmA inputs, 4 DCmA outputs (only one 5A module is allowed)
5C 5C 5C | 8 RTD inputs
5D 5D 5D | 4 RTD inputs, 4 DCmA outputs (only one 5D module is allowed)
5E 5E 5E | 4 RTD inputs, 4 DCmA inputs
5F 5F 5F | 8 D CmA inputs
2A C37.94SM, 1300nm single-mode, ELED, 1 channel single-mode
2B C37.94SM, 1300nm single-mode, ELED, 2 channel single-mode
2E Bi-phase, single channel
2F Bi-phase, dual channel
2G IEEE C37.94, 820 nm, 128 kbps, multimode, LED, 1 Channel
2H IEEE C37.94, 820 nm, 128 kbps, multimode, LED, 2 Channels
72 1550 nm, single-mode, LASER, 1 Channel
73 1550 nm, single-mode, LASER, 2 Channel
74 Channel 1 - RS422; Channel 2 - 1550 nm, single-mode, LASER
75 Channel 1 - G.703; Channel 2 - 1550 nm, Single-mode LASER
76 IEEE C37.94, 820 nm, 64 kbps, multimode, LED, 1 Channel
77 IEEE C37.94, 820 nm, 64 kbps, multimode, LED, 2 Channels
7A 820 nm, multi-mode, LED, 1 Channel
7B 1300 nm, multi-mode, LED, 1 Channel
7C 1300 nm, single-mode, ELED, 1 Channel
7D 1300 nm, single-mode, LASER, 1 Channel
7E Channel 1 - G.703; Channel 2 - 820 nm, multi-mode
7F Channel 1 - G.703; Channel 2 - 1300 nm, multi-mode
7G Channel 1 - G.703; Channel 2 - 1300 nm, single-mode ELED
7H 820 nm, multi-mode, LED, 2 Channels
7I 1300 nm, multi-mode, LED, 2 Cha nnels
7J 1300 nm, single-mode, ELED, 2 Channels
7K 1300 nm, single-mode, LASER, 2 Channels
7L Channel 1 - RS422; Channel 2 - 820 nm, multi-mode, LED
7M Channel 1 - RS422; Channel 2 - 1300 nm, multi-mode, LED
7N Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, ELED
7P Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, LASER
7Q Channel 1 - G.703; Channel 2 - 1300 nm, single-mode LASER
7R G.703, 1 Channel
7S G.703, 2 Channels
7T RS422, 1 Channel
7W RS422, 2 Channels
2
GE Multilin B30 Bus Differential System 2-9
Page 42
2.1 INTRODUCTION 2 PRODUCT DESCRIPTION
c) ORDER CODES WITH PROCESS BUS MODULES
The order codes for the horizontal mount units with the process bus module are shown below.
Table 2–6: B30 ORDER CODES (HORIZONTAL UNITS WITH PROCESS BUS)
BASE UNIT B30 | | | | | | | | | | | Base Unit
CPU T | | | | | | | | | | RS485 with 3 100Base-FX Ethernet, multimode, SFP with LC
SOFTWARE 00 | | | | | | | | | No software options
2
MOUNT/COATING H | | | | | | | | Horizontal (19” rack)
FACEPLATE/ DISPLAY C | | | | | | | English display
POWER SUPPLY
(redundant supply must
be same type as main supply)
PROCESS BUS MODULE | 81 | | | | Eight-port digital process bus module
CONTACT INPUTS/OUTPUTS XX XX XX XX XX No Module
INTER-RELAY
COMMUNICATIONS
(select a maximum of 1 per unit)
B30 - * ** - * * * - F ** - H ** - L ** - N ** - S ** - W/X ** Full Size Horizon tal Mount
U | | | | | | | | | | RS485 with 1 100Base-T Ethernet, SFP RJ-45 + 2 100Base-FX Ethernet, multimode, SFP with LC
V | | | | | | | | | | RS485 with 3 100Base-T E thernet, SFP with RJ-45
01 | | | | | | | | | Ethernet Global Data (EGD) protocol
03 | | | | | | | | | IEC 61850 protocol
04 | | | | | | | | | IEC 61850 and Ethernet Global Data (E GD) protocols
A0 | | | | | | | | | CyberSentry Lvl 1
A1 | | | | | | | | | CyberSentry Lvl 1 and Ethernet Global Data
A3 | | | | | | | | | CyberSentry Lvl 1 and IEC 61850
A4 | | | | | | | | | CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
B0 | | | | | | | | | IEEE 1588
B1 | | | | | | | | | IEEE 1588 and Ethernet Global Data
B3 | | | | | | | | | IEEE 1588 and IEC 61850
B4 | | | | | | | | | IEEE 1588, Ethernet Global Data, and IEC 61850
C0 | | | | | | | | | Parallel Redundancy Protocol (PRP)
C1 | | | | | | | | | PRP and Ethernet Global Data
C3 | | | | | | | | | PRP and IEC 61850
C4 | | | | | | | | | PRP, Ethernet Global Data, and IEC 61850
D0 | | | | | | | | | IEEE 1588 and CyberSentry Lvl 1
D1 | | | | | | | | | IEEE 1588, CyberSentry Lvl 1, and Ethernet Global Data
D3 | | | | | | | | | IEEE 1588, CyberSentry Lvl 1, and IEC 61850
D4 | | | | | | | | | IEEE 1588, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
E0 | | | | | | | | | IEEE 1588 and PRP
E1 | | | | | | | | | IEEE 1588, PRP, and Ethernet Global Dada
E3 | | | | | | | | | IEEE 1588, PRP, and IEC 61850
E4 | | | | | | | | | IEEE 1588, PRP, Ethernet Global Data, and IEC 61850
F0 | | | | | | | | | PRP and CyberSentry Lvl1
F1 | | | | | | | | | PRP, CyberSentry Lvl1, and Ethernet Global Data
F3 | | | | | | | | | PRP, CyberSentry Lvl 1, and IEC 61850
F4 | | | | | | | | | PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
G0 | | | | | | | | | IEEE 1588, PRP, and CyberSentry Lvl 1
G1 | | | | | | | | | IEEE 1588, PRP CyberSentry Lvl 1, Ethernet Global Data
G3 | | | | | | | | | IEEE 1588, PRP CyberSentry Lvl 1, and IEC 61850
G4 | | | | | | | | | IEEE 1588 PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
A | | | | | | | | Horizontal (19” rack) with harsh-environmental coating
D | | | | | | | French display
R | | | | | | | Russian display
A | | | | | | | Chinese display
P | | | | | | | English display with 4 small and 12 large programmable pushbuttons
G | | | | | | | French display with 4 small and 12 large programmable pushbuttons
S | | | | | | | Russian display with 4 small and 12 large programmable pushbuttons
B | | | | | | | Chinese display with 4 small and 12 large programmable pushbuttons
K | | | | | | | Enhanced front panel with English display
M | | | | | | | Enhanced front panel with French displa y
Q | | | | | | | Enhanced front panel wi th Russian display
U | | | | | | | Enhanced front panel with Chinese display
L | | | | | | | Enhanced front panel with English display and user-pro grammable pushbuttons
N | | | | | | | Enhanced front panel with French display and user-programmable pushbuttons
T | | | | | | | Enhanced front panel with Russian display and user-programmable pushbuttons
V | | | | | | | Enhanced front panel with Chinese display and user-programmable pushbuttons
W | | | | | | | Enhanced front panel with Turkish display
Y | | | | | | | Enhanced front panel with Turkish display and user-programmable pushbuttons
H | | | | | | 125 / 250 V AC/DC power supply
H | | | | | RH 125 / 250 V AC/DC with redundant 125 / 250 V AC/DC power supply
L | | | | | | 24 to 48 V (DC only) power supply
L | | | | | RL 24 to 48 V (DC only) with redundant 24 to 48 V DC power supply
4A 4A | 4 Solid-State (no monitoring) MOSFET outputs
4B 4B | 4 Solid-State (voltage with optional current) MOSFET outputs
4C 4C | 4 Solid-State (current with optional voltage) MOSFET outputs
4D 4D | 16 contact inputs with Auto-Burnishing
4L 4L | 14 Form-A (no monitoring) L atching outputs
67 67 | 8 Form-A (no monitori ng) outputs
6A 6A | 2 Form-A (voltage with optional current) and 2 Form-C outputs, 8 contact inputs
6B 6B | 2 Form-A (voltage with optional current) and 4 Form-C outputs, 4 contact inputs
6C 6C | 8 Form-C outputs
6D 6D | 16 contact inputs
6E 6E | 4 Form-C outputs, 8 contact inputs
6F 6F | 8 Fast Form-C outputs
6G 6G | 4 Form-A (voltage with opt ional current) outputs, 8 contact inputs
6H 6H | 6 Form-A (voltage with optional current) outputs, 4 contact inputs
6K 6K | 4 Form-C and 4 Fast Form-C outputs
6L 6L | 2 Form-A (current wit h optional voltage) and 2 Form-C outputs, 8 contact inputs
6M 6M | 2 Form-A (current with optional voltage) and 4 For m-C outputs, 4 contact inputs
6N 6N | 4 Form-A (current with optional voltage) outputs, 8 contact inputs
6P 6P | 6 Form-A (current with optional voltage) outputs, 4 contact inputs
6R 6R | 2 Form-A (no monitoring) and 2 Form-C outputs, 8 contact inputs
6S 6S | 2 Form-A (no monitoring) and 4 Form-C outputs, 4 contact inputs
6T 6T | 4 Form-A (no monitoring) outputs, 8 contact inputs
6U 6U | 6 Form-A (no monitoring) outputs, 4 contact inputs
6V 6V | 2 Form-A outputs, 1 Form-C output, 1 Form-A latching output, 8 contact inputs
2A C37.94SM, 1300nm single-mode, ELED, 1 channel single-mode
2B C37.94SM, 1300nm single-mode, ELED, 2 channel single-mode
2E Bi-phase, single channel
2F Bi-phase, dual channel
2G IE EE C37.94, 820 nm, 128 kbps, multimode, LED, 1 Channel
2H IEEE C37.94, 820 nm, 128 kbps, multimode, LED, 2 Channels
72 1550 nm, single-mode, LASER, 1 Cha nnel
73 1550 nm, single-mode, LASER, 2 Cha nnel
74 Channel 1 - RS422; Channel 2 - 1550 nm, single-mode, LASER
75 Channel 1 - G.703; Channel 2 - 1550 nm, Single-mode LASER
76 IEEE C37.94, 820 nm, 64 kbps, multimode, LED, 1 Channel
77 IEEE C37.94, 820 nm, 64 kbps, multimode, LED, 2 Channels
7A 820 nm, multi-mode, LED, 1 Channel
7B 1300 nm, multi-mode, LED, 1 Channel
7C 1300 nm, single-mode, ELED, 1 Channel
7D 1300 nm, single-mode, LASER, 1 Channel
7E Channel 1 - G.703; Channel 2 - 820 nm, multi-mode
7F Channel 1 - G.703; Channel 2 - 1300 nm, multi-mode
7G Channel 1 - G.703; Channel 2 - 1300 nm, single-mode ELED
7H 820 nm, multi-mode, LED, 2 Channels
7I 1300 nm, multi-mode, LED, 2 Channels
7J 1300 nm, single-mode, ELED , 2 Channels
7K 1300 nm, single-mode, LASER, 2 Channels
7L Channel 1 - RS422; Channel 2 - 820 nm, multi-mode, LED
7M Channel 1 - RS422; Channel 2 - 1300 nm, multi-mode, LED
7N Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, ELED
7P Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, LASER
7Q Channel 1 - G.703; Channel 2 - 1300 nm, single-mode LASER
7R G.703, 1 Channel
7S G.703, 2 Channels
7T RS422, 1 Channel
7W RS422, 2 Channels
2-10 B30 Bus Differential System GE Multilin
Page 43

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
The order codes for the reduced size vertical mount units with the process bus module are shown below.
Table 2–7: B30 ORDER CODES (REDUCED SIZE VERTICAL UNITS WITH PROCESS BUS)
BASE UNIT B30 | | | | | | | | | | Base Unit
CPU T | | | | | | | | | RS485 with 3 100Base-FX Ethernet, multimode, SFP with LC
SOFTWARE 00 | | | | | | | | No software options
MOUNT/COATING V | | | | | | | Vertical (3/4 rack)
FACEPLATE/ DISPLAY F | | | | | | English display
POWER SUPPLY H | | | | | 125 / 250 V AC/DC power supply
CT/VT MODULES | 81 | | | Eight-port digital process bus module
CONTACT INPUTS/OUTPUTS XX XX XX | No Module
INTER-RELAY
COMMUNICATIONS
(select a maximum of 1 per unit)
B30 - * ** - * * * - F ** - H ** - L ** - N ** - R ** Reduced Size Vertical Mount
U | | | | | | | | | RS485 with 1 100Base-T Ethernet, SFP RJ-45 + 2 100Base-FX Ethernet, multimode, SFP with LC
V | | | | | | | | | RS485 with 3 100Base-T Ethernet, SFP with RJ-45
01 | | | | | | | | Ethernet Global Data (EGD) protocol
03 | | | | | | | | IEC 61850 protocol
04 | | | | | | | | IEC 61850 and Ethernet Global Data (EGD) protocols
A0 | | | | | | | | CyberSentry Lvl 1
A1 | | | | | | | | CyberSentry Lvl 1 and Ethernet Global Data
A3 | | | | | | | | CyberSentry Lvl 1 and IEC 61850
A4 | | | | | | | | CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
B0 | | | | | | | | IEEE 1588
B1 | | | | | | | | IEEE 1588 and Ethernet Global Data
B3 | | | | | | | | IEEE 1588 and IEC 61850
B4 | | | | | | | | IEEE 1588, Ethernet Global Data, and IEC 61850
C0 | | | | | | | | Parallel Redundancy Protocol (PRP)
C1 | | | | | | | | PRP and Ethernet Global Data
C3 | | | | | | | | PRP and IEC 61850
C4 | | | | | | | | PRP, Ethernet Global Data, and IEC 61850
D0 | | | | | | | | IEEE 1588 and CyberSentry Lvl 1
D1 | | | | | | | | IEEE 1588, CyberSentry Lvl 1, and Ethernet Global Data
D3 | | | | | | | | IEEE 1588, CyberSentry Lvl 1, and IEC 61850
D4 | | | | | | | | IEEE 1588, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
E0 | | | | | | | | IEEE 1588 and PRP
E1 | | | | | | | | IEEE 1588, PRP, and Ethernet Global Dada
E3 | | | | | | | | IEEE 1588, PRP, and IEC 61850
E4 | | | | | | | | IEEE 1588, PRP, Ethernet Global Data, and IEC 61850
F0 | | | | | | | | PRP and CyberSentry Lvl1
F1 | | | | | | | | PRP, CyberSentry Lvl1, and Ethernet Global Data
F3 | | | | | | | | PRP, CyberSentry Lvl 1, and IEC 61850
F4 | | | | | | | | PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
G0 | | | | | | | | IEEE 1588, PRP, and CyberSentry Lvl 1
G1 | | | | | | | | IEEE 1588, PRP CyberSentry Lvl 1, Ethernet Global Data
G3 | | | | | | | | IEEE 1588, PRP CyberSentry Lvl 1, and IEC 61850
G4 | | | | | | | | IEE E 1588 PRP, CyberSentry Lvl 1, Ethernet Global Data, and IEC 61850
B | | | | | | | Vertical (3/4 rack) with harsh environmental coating
K | | | | | | Enhanced front panel with English display
M | | | | | | Enhanced front panel with French display
Q | | | | | | Enhanced front panel with Russian display
U | | | | | | Enhanced front panel with Chinese display
L | | | | | | Enhanced front panel with English display and user-programmable pushbuttons
N | | | | | | Enhanced front panel with French display and user-programmable pushbuttons
T | | | | | | Enhanced front panel with Russian display and user-progr ammable pushbuttons
V | | | | | | Enhanced front panel with Chinese display and user-programmable pushbuttons
W | | | | | | Enhanced front panel with Turkish display
Y | | | | | | Enhanced front panel with Turkish display and user-programmable pushbuttons
L | | | | | 24 to 48 V (DC only) power supply
4A | 4 Solid-State (no monitoring) MOSFET outputs
4B | 4 Solid-State (voltage with optional current) MOSFET outputs
4C | 4 Solid-State (current with optional voltage) MOSFET outputs
4D | 16 contact inputs with Auto-Burnishing
4L | 14 Form-A (no monitoring) Lat ching outputs
67 | 8 Form-A (no monitoring) outputs
6A | 2 Form-A (voltage with optional current) and 2 Form-C outputs, 8 contact inputs
6B | 2 Form-A (voltage with optional current) and 4 Form-C outputs, 4 contact inputs
6C | 8 Form-C outputs
6D | 16 contact inputs
6E | 4 Form-C outputs, 8 contact inputs
6F | 8 Fast Form-C outputs
6G | 4 Form -A (voltage with optional current) outputs, 8 contact inputs
6H | 6 Form-A (voltage with optional current) outputs, 4 contact inputs
6K | 4 Form-C and 4 Fast Form-C outputs
6L | 2 Form-A (current with optional voltage) and 2 Form-C outputs, 8 contact inputs
6M | 2 Form-A (current w ith optional voltage) and 4 Form-C outputs, 4 contact inputs
6N | 4 Form-A (current with optional voltage) outputs, 8 contact inputs
6P | 6 Form-A (current with optional voltage) outputs, 4 contact inputs
6R | 2 Form-A (no monitoring) and 2 Form-C outputs, 8 contact inputs
6S | 2 Form-A (no monitoring) and 4 Form-C outputs, 4 contact inputs
6T | 4 Form-A (no monitoring) outputs, 8 contact inputs
6U | 6 Form-A (no monitoring) outputs, 4 contact inputs
6V | 2 Form-A outputs, 1 Form-C output, 1 Form-A latching output, 8 contact inputs
2A C37.94SM, 1300nm single-mode, ELED, 1 channel single-mode
2B C37.94SM, 1300nm single-mode, ELED, 2 channel single-mode
2E Bi-phase, single channel
2F Bi-phase, dual channel
2G IEE E C37.94, 820 nm, 128 kbps, multimode, LED, 1 Channel
2H IEEE C37.94, 820 nm, 128 kbps, multimode, LED, 2 Channels
72 1550 nm, single-mode, LASER, 1 Channel
73 1550 nm, single-mode, LASER, 2 Channel
74 Channel 1 - RS422; Channel 2 - 1550 nm, single-mode, LASER
75 Channel 1 - G.703; Channel 2 - 1550 nm, Single-mode LASER
76 IEEE C37.94, 820 nm, 64 kbps, multimode, LED , 1 Channel
77 IEEE C37.94, 820 nm, 64 kbps, multimode, LED , 2 Channels
7A 820 nm, multi-mode, LED, 1 Channel
7B 1300 nm, multi-mode, LED, 1 Channel
7C 1300 nm, single-mode, ELED, 1 Channel
7D 1300 nm, single-mode, LASER, 1 Channel
7E Channel 1 - G.703; Channel 2 - 820 nm, multi-mode
7F Channel 1 - G.703; Channel 2 - 1300 nm, multi-mode
7G Channel 1 - G.703; Channel 2 - 1300 nm, single-mode ELED
7H 820 nm, multi-mode, LED, 2 Channels
7I 1300 nm, multi-mode, LED, 2 Channels
7J 1300 nm, single-mode, ELE D, 2 Channels
7K 1300 nm, single-mode, LASER, 2 Channels
7L Channel 1 - RS422; Channel 2 - 820 n m, multi-mode, LED
7M Channel 1 - RS422; Channe l 2 - 1300 nm, multi-mode, LED
7N Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, ELED
7P Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, LASER
7Q Channel 1 - G.703; Channel 2 - 1300 nm, single-mode LASER
7R G.703, 1 Channel
7S G.703, 2 Channels
7T RS422, 1 Channel
7W RS422, 2 Channels
2
GE Multilin B30 Bus Differential System 2-11
Page 44
2.1 INTRODUCTION 2 PRODUCT DESCRIPTION
NOTE
NOTE
2.1.4 REPLACEMENT MODULES
Replacement modules can be ordered separately. When ordering a replacement CPU module or faceplate, provide the
serial number of your existing unit.
Not all replacement modules may be applicable to the B30 relay. Only the modules specified in the order codes are
available as replacement modules.
2
Replacement module codes are subject to change without notice. See the ordering page at
http://www.gedigitalenergy.com/multilin/order.htm
for the latest options.
The replacement module order codes for the horizontal mount units are shown below.
Table 2–8: ORDER CODES FOR REPLACEMENT MODULES, HORIZONTAL UNITS
POWER SUPPLY (redundant supply only available in
horizontal units and must be same type as main
supply) (for redundant supply, must swap both power
supplies when switching from RH to SH)
CPU | T | RS485 with 3 100Base-FX Ethernet, multimode, SFP with LC
FACEPLATE/DISPLAY | 3C | Hor izontal faceplate with keypad and English display
CONTACT INPUTS AND OUTPUTS | 4A | 4 Solid-State (no monitoring) MOSFET outputs
CT/VT MODULES
(NOT AVAILABLE FOR THE C30)
INTER-RELAY COMMUNICATIONS | 2A | C37.94SM, 1300nm single-mode, ELED, 1 channel single-mode
TRANSDUCER
INPUTS/OUTPUTS
UR - ** - *
| SH A | 125 / 300 V AC/DC
| RL H | 24 to 48 V (DC only)
| U | RS485 with 1 100Base-T Ethernet, SFP RJ-45 + 2 100Base-FX Ethernet, multimode, SFP with LC
| V | RS485 with 3 100Base-T Ethernet, SFP with RJ-45
| 3D | Hor izontal faceplate with keypad and French display
| 3R | Horizontal faceplate with keypad and Russian display
| 3A | Horizontal faceplate wit h keypad and Chinese display
| 3P | Horizontal faceplate wit h keypad, user-programmable pushbuttons, and English display
| 3G | Horizontal faceplate with keypad, user-programmable pushbuttons, and French display
| 3S | Horizontal faceplate with keypad, user-programmable pushbuttons, and Russian display
| 3B | Horizontal faceplate wit h keypad, user-programmable pushbuttons, and Chinese display
| 3K | Enhanced fro nt panel with English display
| 3M | Enhanced front panel with French display
| 3Q | Enhanced front panel with Russian display
| 3U | Enhanced front panel with Chinese display
| 3L | Enhanced front panel with Eng lish display and user-programmable pushbuttons
| 3N | Enhanced front panel with French display and user-programmable pushbuttons
| 3T | Enhanced front panel with Russian display and user-programmable pushbuttons
| 3V | Enhanced fro nt panel with Chinese display and user-programmable pushbuttons
| 4B | 4 Solid-State (voltage with optional current) MOSFET outputs
| 4C | 4 Solid-State (current with optional voltage) MOSFET out puts
| 4D | 16 contact inputs with Auto-B urnishing
| 4L | 14 Form-A (no monitoring) Latching outputs
| 67 | 8 Form-A (no monitoring) outputs
| 6A | 2 Form-A (voltage with optional current) and 2 Form-C outputs, 8 contact inputs
| 6B | 2 Form-A (voltage with optional current) and 4 Form-C outputs, 4 contact inputs
| 6C | 8 Form-C outputs
| 6D | 16 contact inputs
| 6E | 4 Form-C outputs, 8 contact inputs
| 6F | 8 Fast Form-C outputs
| 6G | 4 Form -A (voltage with optional current) outputs, 8 contact inputs
| 6H | 6 Form-A (voltage wit h optional current) outputs, 4 contact inputs
| 6K | 4 Form-C and 4 Fast Form-C outputs
| 6L | 2 Form-A (current with optional voltage) and 2 Form-C outputs, 8 contact inputs
| 6M | 2 Form-A (current with optiona l voltage) and 4 Form-C outputs, 4 contact inputs
| 6N | 4 Form-A (current with optional voltage) outputs, 8 contact inputs
| 6P | 6 Form-A (current with optional voltage) outputs, 4 contact inputs
| 6R | 2 Form-A (no monitoring) and 2 Form-C outputs, 8 contact inputs
| 6S | 2 Form-A (no monitoring) and 4 Form-C outputs, 4 contact inputs
| 6T | 4 Form-A (no monitoring ) outputs, 8 contact inputs
| 6U | 6 Form-A (no monitoring) outputs, 4 contact inputs
| 6V | 2 Form-A outputs, 1 Form-C output, 2 Form-A (no monitoring) latching outputs, 8 contact inputs
| 8L | Standard 4CT/4VT with enhanced diagnostics
| 8N | Standard 8CT with enhanced diagnostics
| 8M | Sensitive Ground 4CT/4VT with enhanced diagnostics
| 8R | Sensit ive Ground 8CT with enhanced diagnostics
| 2B | C37.94SM, 1300nm single-mode, ELED, 2 channel single-mode
| 2E | Bi-phase, single channel
| 2F | Bi-phase, dual channel
| 2G | IEEE C 37.94, 820 nm, 128 kbps, multimode, LED, 1 Channel
| 2H | IEEE C37.94 , 820 nm, 128 kbps, multimode, LED, 2 Channels
| 72 | 1550 nm, single-mode, LASER, 1 Channel
| 73 | 1550 nm, single-mode, LASER, 2 Channel
| 74 | Channel 1 - RS422; Channel 2 - 1550 nm, single-mode, LASER
| 75 | Channel 1 - G.703; Channel 2 - 1550 nm, Single-mode LASER
| 76 | IEEE C37.94, 820 nm, multimode, LED, 1 Channel
| 77 | IEEE C37.94, 820 nm, multimode, LED, 2 Channels
| 7A | 820 nm, multi-mode, LED, 1 Channel
| 7B | 1300 nm, multi-mode, LED, 1 Channel
| 7C | 1300 nm, single-mode, EL ED, 1 Channel
| 7D | 1300 nm, single-mode, LA SER, 1 Channel
| 7E | Channel 1 - G.703; Channel 2 - 820 nm, multi-mode
| 7F | Channel 1 - G.703; Channel 2 - 1300 nm, multi-mode
| 7G | Channel 1 - G.703; Channel 2 - 1300 nm, single-mode ELED
| 7H | 820 nm, multi-mode, LED , 2 Channels
| 7I | 1300 nm, multi-mode, LED, 2 Channels
| 7J | 1300 nm, single-mode, ELED, 2 Channels
| 7K | 1300 nm, single-mode, LASER, 2 Channels
| 7L | Channel 1 - RS422; Channel 2 - 820 nm, multi-mode, LED
| 7M | Channel 1 - RS422; Channel 2 - 1300 nm, multi- mode, LED
| 7N | Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, ELED
| 7P | Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, LASER
| 7Q | Channel 1 - G.703; Channel 2 - 1300 nm, single-mode LASER
| 7R | G.703, 1 Channel
| 7S | G.703, 2 Channels
| 7T | RS422, 1 Channel
| 7W | RS 422, 2 Channels
| 5A | 4 DCmA inputs, 4 DCmA ou tputs (only one 5A module is allowed)
| 5C | 8 RTD inputs
| 5D | 4 RTD inputs, 4 DCmA outp uts (only one 5D module is allowed)
| 5E | 4 DCmA inputs, 4 RTD inputs
| 5F | 8 DCmA inputs
2-12 B30 Bus Differential System GE Multilin
Page 45

2 PRODUCT DESCRIPTION 2.1 INTRODUCTION
The replacement module order codes for the reduced-size vertical mount units are shown below.
Table 2–9: ORDER CODES FOR REPLACEMENT MODULES, VERTICAL UNITS
POWER SUPPLY | SH B | 125 / 300 V AC/DC
CPU | T | RS485 with 3 100Base-FX Ethernet, multimode, SFP with LC
FACEPLATE/DISPLAY | 3F | Vertical faceplate with keypad and English display
CONTACT INPUTS/OUTPUTS | 4A | 4 Solid-State (no monitoring) MOSFET o utputs
CT/VT MODULES
(NOT AVAILABLE FOR THE C30)
INTER-RELAY COMMUNICATIONS | 2A | C37.94SM, 1300nm single-mode, ELED, 1 channel single-mode
TRANSDUCER
INPUTS/OUTPUTS
UR - ** - *
| RL V | 24 to 48 V (DC only)
| U | RS485 with 1 100Base-T Ethernet, SFP RJ-45 + 2 100Base-FX Ethernet, multimode, SFP with LC
| V | RS485 with 3 100Base-T Ethernet, SFP with RJ-45
| 3D | Vertical faceplate with keypad and French display
| 3R | Vertical faceplate with keypad and Russian display
| 3K | Vertical faceplate with keypad and Chinese display
| 3K | Enhanced fro nt panel with English display
| 3M | Enhanced front panel with French display
| 3Q | Enhanced front panel with Russian display
| 3U | Enhanced front panel with Chinese display
| 3L | Enhanced front panel with En glish display and user-programmable pushbuttons
| 3N | Enhanced front panel with French display and user-programmable pushbuttons
| 3T | Enhanced front panel with Russian display and user-programmable pushbuttons
| 3V | Enhanced fro nt panel with Chinese display and user-programmable pushbuttons
| 4B | 4 Solid-State (voltage with optional current) MOSFET outputs
| 4C | 4 Solid-State (current with optional voltage) MOSFET out puts
| 4D | 16 contact inputs with Auto -Burnishing
| 4L | 14 Form-A (no monitoring) Latching outputs
| 67 | 8 Form-A (no monitoring) outputs
| 6A | 2 Form-A (voltage with optional current) and 2 Form-C outputs, 8 contact inputs
| 6B | 2 Form-A (voltage with optional current) and 4 Form-C outputs, 4 contact inputs
| 6C | 8 Form-C outputs
| 6D | 16 contact inputs
| 6E | 4 Form-C outputs, 8 contact inputs
| 6F | 8 Fast Form-C outputs
| 6G | 4 Form -A (voltage with optional current) outputs, 8 contact inputs
| 6H | 6 Form-A (voltage wit h optional current) outputs, 4 contact inputs
| 6K | 4 Form-C and 4 Fast Form-C outputs
| 6L | 2 Form-A (current with optional voltage) and 2 Form-C outputs, 8 contact inputs
| 6M | 2 Form-A (current with optiona l voltage) and 4 Form-C outputs, 4 contact inputs
| 6N | 4 Form-A (current with optional voltage) outputs, 8 contact inputs
| 6P | 6 Form-A (current with optional voltage) outputs, 4 contact inputs
| 6R | 2 Form-A (no monitoring) and 2 Form-C outputs, 8 contact inputs
| 6S | 2 Form-A (no monitoring) and 4 Form-C outputs, 4 contact inputs
| 6T | 4 Form-A (no monitoring ) outputs, 8 contact inputs
| 6U | 6 Form-A (no monitoring) outputs, 4 contact inputs
| 6V | 2 Form-A outputs, 1 Form-C output, 2 Form-A (no monitoring) latching outputs, 8 contact inputs
| 8L | Standard 4CT/4VT with enhanced diagnostics
| 8N | Standard 8CT with enhanced diagnostics
| 2B | C37.94SM, 1300nm single-mode, ELED, 2 channel single-mode
| 2E | Bi-phase, single channel
| 2F | Bi-phase, dual channel
| 2G | IEEE C 37.94, 820 nm, 128 kbps, multimode, LED, 1 Channel
| 2H | IEEE C37.94 , 820 nm, 128 kbps, multimode, LED, 2 Channels
| 72 | 1550 nm, single-mode, LASER, 1 Channel
| 73 | 1550 nm, single-mode, LASER, 2 Channel
| 74 | Channel 1 - RS422; Channel 2 - 1550 nm, single-mode, LASER
| 75 | Channel 1 - G.703; Channel 2 - 1550 nm, Single-mode LASER
| 76 | IEEE C37.94, 820 nm, 64 kbps, multimode, LED, 1 Channel
| 77 | IEEE C37.94, 820 nm, 64 kbps, multimode, LED, 2 Channels
| 7A | 820 nm, multi-mode, LED, 1 Channel
| 7B | 1300 nm, multi-mode, LED, 1 Channel
| 7C | 1300 nm, single-mode, EL ED, 1 Channel
| 7D | 1300 nm, single-mode, LA SER, 1 Channel
| 7E | Channel 1 - G.703; Channel 2 - 820 nm, multi-mode
| 7F | Channel 1 - G.703; Channel 2 - 1300 nm, multi-mode
| 7G | Channel 1 - G.703; Channel 2 - 1300 nm, single-mode ELED
| 7H | 820 nm, multi-mode, LE D, 2 Channels
| 7I | 1300 nm, multi-mode, LED, 2 Channels
| 7J | 1300 nm, single-mode, ELED, 2 Channels
| 7K | 1300 nm, single-mode, LASER, 2 Channels
| 7L | Channel 1 - RS422; Channel 2 - 820 nm, multi-mode, LED
| 7M | Channel 1 - RS422; Channel 2 - 1300 nm, multi- mode, LED
| 7N | Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, ELED
| 7P | Channel 1 - RS422; Channel 2 - 1300 nm, single-mode, LASER
| 7Q | Channel 1 - G.703; Channel 2 - 1300 nm, single-mode LASER
| 7R | G.703, 1 Channel
| 7S | G.703, 2 Channels
| 7T | RS422, 1 Channel
| 7W | RS 422, 2 Channels
| 5A | 4 DCmA inputs, 4 DCmA ou tputs (only one 5A module is allowed)
| 5C | 8 RTD inputs
| 5D | 4 RTD inputs, 4 DC mA outputs (only one 5D module is allowed)
| 5E | 4 DCmA inputs, 4 RTD inputs
| 5F | 8 DCmA inputs
2
GE Multilin B30 Bus Differential System 2-13
Page 46
2.2 SPECIFICATIONS 2 PRODUCT DESCRIPTION
NOTE
2.2SPECIFICATIONS
SPECIFICATIONS ARE SUBJECT TO CHANGE WITHOUT NOTICE
The operating times include the activation time of a trip rated form-A output contact unless otherwise indicated.
FlexLogic operands of a given element are 4 ms faster. Take this into account when using FlexLogic to interconnect
2
with other protection or control elements of the relay, building FlexLogic equations, or interfacing with other IEDs or
power system devices via communications or different output contacts. If not specified, operate times are given
here for a 60 Hz system at nominal system frequency. Operate times for a 50 Hz system are 1.2 times longer.
BUS DIFFERENTIAL (87B)
Pickup level: 0.050 to 6.000 pu in steps of 0.001
Low slope: 15 to 100% in steps of 1
High slope: 50 to 100% in steps of 1
Low breakpoint: 1.00 to 30.00 pu in steps of 0.01
High breakpoint: 1.00 to 30.00 pu in steps of 0.01
High set level: 0.10 to 99.99 pu in steps of 0.01
Dropout level: 97 to 98% of pickup
Level accuracy:
0.1 to 2.0 × CT rating: ±0.5% of reading or ±1% of rated (which-
>2.0 × CT rating ±1.5% of reading of the maximum circuit
Operating time: one power system cycle (typical)
Number of zones: 2
ever is greater) for six circuits or less in
the zone
current
CT TROUBLE
Responding to: Differential current
Pickup level: 0.020 to 2.000 pu in steps of 0.001
Pickup delay: 1.0 to 60.0 sec. in steps of 0.1
PHASE/NEUTRAL/GROUND TOC
Current: Phasor or RMS
Pickup level: 0.000 to 30.000 pu in steps of 0.001
Dropout level: 97% to 98% of pickup
Level accuracy:
0.1 to 2.0 × CT: ±0.5% of reading or ±0.4% of rated
> 2.0 × CT: ±1.5% of reading > 2.0 × CT rating
Curve shapes: IEEE Moderately/Very/Extremely
Curve multiplier: Time Dial = 0.00 to 600.00 in steps of
Reset type: Instantaneous/Timed (per IEEE)
Curve timing accuracy
at 1.03 to 20 x pickup: ±3.5% of operate time or ±½ cycle
Voltage restraint: Modifies pickup current for voltage in the
(whichever is greater)
Inverse; IEC (and BS) A/B/C and Short
Inverse; GE IAC Inverse, Short/Very/
Extremely Inverse; I
(programmable); Definite Time (0.01 s
base curve)
0.01
(whichever is greater) from pickup to
operate
range of 0.1<V<0.9 VT Nominal in a
fixed linear relationship
2
t; FlexCurves™
2.2.1 PROTECTION ELEMENTS
PHASE/NEUTRAL/GROUND IOC
Current: Phasor only
Pickup level: 0.000 to 30.000 pu in steps of 0.001
Dropout level: 97 to 98% of pickup
Level accuracy:
0.1 to 2.0 × CT rating: ±0.5% of reading or ±0.4% of rated
(whichever is greater)
> 2.0 × CT rating ±1.5% of reading
Overreach: <2%
Pickup delay: 0.00 to 600.00 s in steps of 0.01
Reset delay: 0.00 to 600.00 s in steps of 0.01
Operate time: <16 ms at 3 × pickup at 60 Hz
(Phase/Ground IOC)
<20 ms at 3 × pickup at 60 Hz
(Neutral IOC)
Timer accuracy: ±3% of operate time or ±1/4 cycle
(whichever is greater)
PHASE UNDERVOLTAGE
Pickup level: 0.000 to 3.000 pu in steps of 0.001
Dropout level: 102 to 103% of pickup
Level accuracy: ±0.5% of reading from 10 to 208 V
Curve shapes: GE IAV Inverse;
Definite Time (0.1s base curve)
Curve multiplier: Time dial = 0.00 to 600.00 in steps of
0.01
Curve timing accuracy
at <0.90 x pickup: ±3.5% of operate time or ±1/2 cycle
(whichever is greater) from pickup to
operate
NEUTRAL OVERVOLTAGE
Pickup level: 0.000 to 3.000 pu in steps of 0.001
Dropout level: 97 to 98% of pickup
Level accuracy: ±0.5% of reading from 10 to 208 V
Pickup delay: 0.00 to 600.00 s in steps of 0.01 (definite
time) or user-defined curve
Reset delay: 0.00 to 600.00 s in steps of 0.01
Curve timing accuracy
at >1.1 x pickup: ±3.5% of operate time or ±1 cycle
(whichever is greater) from pickup to
operate
Operate time: <30 ms at 1.10 × pickup at 60 Hz
2-14 B30 Bus Differential System GE Multilin
Page 47

2 PRODUCT DESCRIPTION 2.2 SPECIFICATIONS
AUXILIARY OVERVOLTAGE
Pickup level: 0.000 to 3.000 pu in steps of 0.001
Dropout level: 97 to 98% of pickup
Level accuracy: ±0.5% of reading from 10 to 208 V
Pickup delay: 0 to 600.00 s in steps of 0.01
Reset delay: 0 to 600.00 s in steps of 0.01
Timer accuracy: ±3% of operate time or ±1/4 cycle
(whichever is greater)
Operate time: <30 ms at 1.10 × pickup at 60 Hz
BREAKER FAILURE
Mode: 1-pole, 3-pole
Current supervision: phase, neutral current
Current supv. pickup: 0.001 to 30.000 pu in steps of 0.001
Current supv. dropout: 97 to 98% of pickup
Current supv. accuracy:
0.1 to 2.0 × CT rating: ±0.75% of reading or ±2% of rated
(whichever is greater)
above 2 × CT rating: ±2.5% of reading
BREAKER FLASHOVER
Operating quantity: phase current, voltage and voltage differ-
ence
Pickup level voltage: 0 to 1.500 pu in steps of 0.001
Dropout level voltage: 97 to 98% of pickup
Pickup level current: 0 to 1.500 pu in steps of 0.001
Dropout level current: 97 to 98% of pickup
Level accuracy: ±0.5% or ±0.1% of rated, whichever is
Pickup delay: 0 to 65.535 s in steps of 0.001
Timer accuracy: ±3% of operate time or ±42 ms, which-
Operate time: <42 ms at 1.10 × pickup at 60 Hz
greater
ever is greater
THERMAL OVERLOAD PROTECTION
Thermal overload curves: IEC 255-8 curve
Base current: 0.20 to 3.00 pu in steps of 0.01
Overload (k) factor: 1.00 to 1.20 pu in steps of 0.05
Trip time constant: 0 to 1000 min. in steps of 1
Reset time constant: 0 to 1000 min. in steps of 1
Minimum reset time: 0 to 1000 min. in steps of 1
Timer accuracy (cold curve): ±100 ms or 2%, whichever is greater
Timer accuracy (hot curve): ±500 ms or 2%, whichever is greater
< 0.9 × k × Ib and I / (k × Ib) > 1.1
for I
p
TRIP BUS (TRIP WITHOUT FLEXLOGIC)
Number of elements: 6
Number of inputs: 16
Operate time: <2 ms at 60 Hz
Timer accuracy: ±3% or 10 ms, whichever is greater
2
FLEXLOGIC
Programming language: Reverse Polish Notation with graphical
visualization (keypad programmable)
Lines of code: 512
Internal variables: 64
Supported operations: NOT, XOR, OR (2 to 16 inputs), AND (2
to 16 inputs), NOR (2 to 16 inputs),
NAND (2 to 16 inputs), latch (reset-domi-
nant), edge detectors, timers
Inputs: any logical variable, contact, or virtual
input
Number of timers: 32
Pickup delay: 0 to 60000 (ms, sec., min.) in steps of 1
Dropout delay: 0 to 60000 (ms, sec., min.) in steps of 1
FLEXCURVES™
Number: 4 (A through D)
Reset points: 40 (0 through 1 of pickup)
Operate points: 80 (1 through 20 of pickup)
Time delay: 0 to 65535 ms in steps of 1
FLEX STATES
Number: up to 256 logical variables grouped
under 16 Modbus addresses
Programmability: any logical variable, contact, or virtual
input
2.2.2 USER-PROGRAMMABLE ELEMENTS
FLEXELEMENTS™
Number of elements: 8
Operating signal: any analog actual value, or two values in
differential mode
Operating signal mode: signed or absolute value
Operating mode: level, delta
Comparator direction: over, under
Pickup Level: –90.000 to 90.000 pu in steps of 0.001
Hysteresis: 0.1 to 50.0% in steps of 0.1
Delta dt: 20 ms to 60 days
Pickup & dropout delay: 0.000 to 65.535 s in steps of 0.001
NON-VOLATILE LATCHES
Type: set-dominant or reset-dominant
Number: 16 (individually programmed)
Output: stored in non-volatile memory
Execution sequence: as input prior to protection, control, and
FlexLogic
USER-PROGRAMMABLE LEDs
Number: 48 plus trip and alarm
Programmability: from any logical variable, contact, or vir-
tual input
Reset mode: self-reset or latched
GE Multilin B30 Bus Differential System 2-15
Page 48

2.2 SPECIFICATIONS 2 PRODUCT DESCRIPTION
LED TEST
Initiation: from any contact input or user-program-
mable condition
Number of tests: 3, interruptible at any time
Duration of full test: approximately 3 minutes
Test sequence 1: all LEDs on
Test sequence 2: all LEDs off, one LED at a time on for 1 s
Test sequence 3: all LEDs on, one LED at a time off for 1 s
2
USER-DEFINABLE DISPLAYS
Number of displays: 16
Lines of display: 2 × 20 alphanumeric characters
Parameters: up to 5, any Modbus register addresses
Invoking and scrolling: keypad, or any user-programmable con-
dition, including pushbuttons
CONTROL PUSHBUTTONS
Number of pushbuttons: 7
Operation: drive FlexLogic operands
USER-PROGRAMMABLE PUSHBUTTONS (OPTIONAL)
Number of pushbuttons: 12 (standard faceplate);
16 (enhanced faceplate)
Mode: self-reset, latched
Display message: 2 lines of 20 characters each
Drop-out timer: 0.00 to 60.00 s in steps of 0.05
Autoreset timer: 0.2 to 600.0 s in steps of 0.1
Hold timer: 0.0 to 10.0 s in steps of 0.1
SELECTOR SWITCH
Number of elements: 2
Upper position limit: 1 to 7 in steps of 1
Selecting mode: time-out or acknowledge
Time-out timer: 3.0 to 60.0 s in steps of 0.1
Control inputs: step-up and 3-bit
Power-up mode: restore from non-volatile memory or syn-
chronize to a 3-bit control input or synch/
restore mode
DIGITAL ELEMENTS
Number of elements: 48
Operating signal: any FlexLogic operand
Pickup delay: 0.000 to 999999.999 s in steps of 0.001
Dropout delay: 0.000 to 999999.999 s in steps of 0.001
Timing accuracy: ±3% or ±4 ms, whichever is greater
2.2.3 MONITORING
OSCILLOGRAPHY
Maximum records: 64
Sampling rate: 64 samples per power cycle
Triggers: any element pickup, dropout, or operate;
contact input change of state; contact
output change of state; FlexLogic equation
Data: AC input channels; element state; con-
tact input state; contact output state
Data storage: in non-volatile memory
RMS CURRENT: PHASE, NEUTRAL, AND GROUND
Accuracy at
0.1 to 2.0 × CT rating: ±0.25% of reading or ±0.1% of rated
(whichever is greater)
> 2.0 × CT rating: ±1.0% of reading
RMS VOLTAGE
Accuracy: ±0.5% of reading from 10 to 208 V
EVENT RECORDER
Capacity: 1024 events
Time-tag: to 1 microsecond
Triggers: any element pickup, dropout, or operate;
Data storage: in non-volatile memory
contact input change of state; contact
output change of state; self-test events
USER-PROGRAMMABLE FAULT REPORT
Number of elements: 2
Pre-fault trigger: any FlexLogic operand
Fault trigger: any FlexLogic operand
Recorder quantities: 32 (any FlexAnalog
TM
value)
2.2.4 METERING
FREQUENCY
Accuracy at
V = 0.8 to 1.2 pu: ±0.01 Hz (when voltage signal is used
I = 0.1 to 0.25 pu: ±0.05 Hz
I > 0.25 pu: ±0.02 Hz (when current signal is used for
for frequency measurement)
frequency measurement)
2-16 B30 Bus Differential System GE Multilin
Page 49

2 PRODUCT DESCRIPTION 2.2 SPECIFICATIONS
2.2.5 INPUTS
AC CURRENT
CT rated primary: 1 to 50000 A
CT rated secondary: 1 A or 5 A by connection
Relay burden: < 0.2 VA at rated secondary
Conversion range:
Standard CT: 0.02 to 46 × CT rating RMS symmetrical
Sensitive Ground CT module:
0.002 to 4.6 × CT rating RMS symmetrical
Current withstand: 20 ms at 250 times rated
1 sec. at 100 times rated
continuous 4xInom
URs equipped with 24 CT inputs have a
maximum operating temperature of 50°C
Short circuit rating: 150000 RMS symmetrical amperes, 250
V maximum (primary current to external
CT)
AC VOLTAGE
VT rated secondary: 50.0 to 240.0 V
VT ratio: 1.00 to 24000.00Relay burden:< 0.25 VA
at 120 V
Conversion range: 1 to 275 V
Voltage withstand: continuous at 260 V to neutral
1 min./hr at 420 V to neutral
FREQUENCY
Nominal frequency setting:25 to 60 Hz
Sampling frequency: 64 samples per power cycle
Tracking frequency range:20 to 70 Hz
CONTACT INPUTS
Dry contacts: 1000 Ω maximum
Wet contacts: 300 V DC maximum
Selectable thresholds: 17 V, 33 V, 84 V, 166 V
Tolerance: ±10%
Contacts per common return: 4
Recognition time: < 1 ms
Debounce time: 0.0 to 16.0 ms in steps of 0.5
Continuous current draw:4 mA (when energized)
CONTACT INPUTS WITH AUTO-BURNISHING
Dry contacts: 1000 Ω maximum
Wet contacts: 300 V DC maximum
Selectable thresholds: 17 V, 33 V, 84 V, 166 V
Tolerance: ±10%
Contacts per common return: 2
Recognition time: < 1 ms
Debounce time: 0.0 to 16.0 ms in steps of 0.5
Continuous current draw:4 mA (when energized)
Auto-burnish impulse current: 50 to 70 mA
Duration of auto-burnish impulse: 25 to 50 ms
DCMA INPUTS
Current input (mA DC): 0 to –1, 0 to +1, –1 to +1, 0 to 5, 0 to 10,
0 to 20, 4 to 20 (programmable)
Input impedance: 379 Ω ±10%
Conversion range: –1 to + 20 mA DC
Accuracy: ±0.2% of full scale
Type: Passive
RTD INPUTS
Types (3-wire): 100 Ω Platinum, 100 & 120 Ω Nickel, 10
Ω Copper
Sensing current: 5 mA
Range: –50 to +250°C
Accuracy: ±2°C
Isolation: 36 V pk-pk
IRIG-B INPUT
Amplitude modulation: 1 to 10 V pk-pk
DC shift: TTL–Compatible
Input impedance: 50 kΩ
Isolation: 2 kV
REMOTE INPUTS (IEC 61850 GSSE/GOOSE)
Input points: 32, configured from 64 incoming bit pairs
Remote devices: 16
Default states on loss of comms.: On, Off, Latest/Off, Latest/On
Remote DPS inputs: 5
DIRECT INPUTS
Input points: 32
Remote devices: 16
Default states on loss of comms.: On, Off, Latest/Off, Latest/On
Ring configuration: Yes, No
Data rate: 64 or 128 kbps
CRC: 32-bit
CRC alarm:
Responding to: Rate of messages failing the CRC
Monitoring message count: 10 to 10000 in steps of 1
Alarm threshold: 1 to 1000 in steps of 1
Unreturned message alarm:
Responding to: Rate of unreturned messages in the ring
configuration
Monitoring message count: 10 to 10000 in steps of 1
Alarm threshold: 1 to 1000 in steps of 1
TELEPROTECTION
Input points: 16
Remote devices: 3
Default states on loss of comms.: On, Off, Latest/Off, Latest/On
Ring configuration: No
Data rate: 64 or 128 kbps
CRC: 32-bit
2
GE Multilin B30 Bus Differential System 2-17
Page 50

2.2 SPECIFICATIONS 2 PRODUCT DESCRIPTION
2.2.6 POWER SUPPLY
LOW RANGE
Nominal DC voltage: 24 to 48 V
Minimum DC voltage: 20 V
Maximum DC voltage: 60 V
Voltage loss hold-up: 20 ms duration at nominal
NOTE: Low range is DC only.
2
HIGH RANGE
Nominal DC voltage: 125 to 250 V
Minimum DC voltage: 88 V
Maximum DC voltage: 300 V
Nominal AC voltage: 100 to 240 V at 50/60 Hz
Minimum AC voltage: 88 V at 25 to 100 Hz
Maximum AC voltage: 265 V at 25 to 100 Hz
Voltage loss hold-up: 200 ms duration at nominal
FORM-A RELAY
Make and carry for 0.2 s: 30 A as per ANSI C37.90
Carry continuous: 6 A
Break (DC inductive, L/R = 40 ms):
VOLTAGE CURRENT
24 V 1 A
48 V 0.5 A
125 V 0.3 A
250 V 0.2 A
Operate time: < 4 ms
Contact material: silver alloy
LATCHING RELAY
Make and carry for 0.2 s: 30 A as per ANSI C37.90
Carry continuous: 6 A as per IEEE C37.90
Break (DC resistive as per IEC61810-1):
VOLTAGE CURRENT
24 V 6 A
48 V 1.6 A
125 V 0.4 A
250 V 0.2 A
Operate time: < 4 ms
Contact material: silver alloy
Control: separate operate and reset inputs
Control mode: operate-dominant or reset-dominant
FORM-A VOLTAGE MONITOR
Applicable voltage: approx. 15 to 250 V DC
Trickle current: approx. 1 to 2.5 mA
ALL RANGES
Volt withstand: 2 × Highest Nominal Voltage for 10 ms
Power consumption: typical = 15 to 20 W/VA
maximum = 50 W/VA
contact factory for exact order code consumption
INTERNAL FUSE
RATINGS
Low range power supply: 8 A / 250 V
High range power supply: 4 A / 250 V
INTERRUPTING CAPACITY
AC: 100 000 A RMS symmetrical
DC: 10 000 A
2.2.7 OUTPUTS
FORM-A CURRENT MONITOR
Threshold current: approx. 80 to 100 mA
FORM-C AND CRITICAL FAILURE RELAY
Make and carry for 0.2 s: 30 A as per ANSI C37.90
Carry continuous: 8 A
Break (DC inductive, L/R = 40 ms):
VOLTAGE CURRENT
24 V 1 A
48 V 0.5 A
125 V 0.3 A
250 V 0.2 A
Operate time: < 8 ms
Contact material: silver alloy
FAST FORM-C RELAY
Make and carry: 0.1 A max. (resistive load)
Minimum load impedance:
INPUT
VOLTAGE
250 V DC 20 KΩ 50 KΩ
120 V DC 5 KΩ 2 KΩ
48 V DC 2 KΩ 2 KΩ
24 V DC 2 KΩ 2 KΩ
Note: values for 24 V and 48 V are the same due to a
required 95% voltage drop across the load impedance.
Operate time: < 0.6 ms
Internal Limiting Resistor: 100 Ω, 2 W
2 W RESISTOR 1 W RESISTOR
IMPEDANCE
2-18 B30 Bus Differential System GE Multilin
Page 51

2 PRODUCT DESCRIPTION 2.2 SPECIFICATIONS
SOLID-STATE OUTPUT RELAY
Operate and release time: <100 μs
Maximum voltage: 265 V DC
Maximum continuous current: 5 A at 45°C; 4 A at 65°C
Make and carry:
for 0.2 s: 30 A as per ANSI C37.90
for 0.03 s 300 A
Breaking capacity:
Operations/
interval
Break
capability
(0 to 250 V
DC)
UL508 Utility
5000 ops /
1s-On, 9s-Off
1000 ops /
0.5 s-On, 0.5 s-Off
3.2 A
L/R = 10 ms
1.6 A
L/R = 20 ms
0.8 A
L/R = 40 ms
application
(autoreclose
scheme)
5ops/
0.2 s-On,
0.2 s-Off
within 1
minute
10 A
L/R = 40 ms
Industrial
application
10000 ops /
0.2 s-On,
30 s-Off
10 A
L/R = 40 ms
CONTROL POWER EXTERNAL OUTPUT
(FOR DRY CONTACT INPUT)
Capacity: 100 mA DC at 48 V DC
Isolation: ±300 Vpk
REMOTE OUTPUTS (IEC 61850 GSSE/GOOSE)
Standard output points: 32
User output points: 32
DIRECT OUTPUTS
Output points: 32
DCMA OUTPUTS
Range: –1 to 1 mA, 0 to 1 mA, 4 to 20 mA
Max. load resistance: 12 kΩ for –1 to 1 mA range
12 kΩ for 0 to 1 mA range
600 Ω for 4 to 20 mA range
Accuracy: ±0.75% of full-scale for 0 to 1 mA range
±0.5% of full-scale for –1 to 1 mA range
±0.75% of full-scale for 0 to 20 mA range
99% Settling time to a step change: 100 ms
Isolation: 1.5 kV
Driving signal: any FlexAnalog quantity
Upper and lower limit for the driving signal: –90 to 90 pu in steps of
0.001
2.2.8 COMMUNICATION PROTOCOLS
2
RS232
Front port: 19.2 kbps, Modbus RTU
RS485
1 rear port: Up to 115 kbps, Modbus RTU, DNP 3
Typical distance: 1200 m
Isolation: 2 kV, isolated together at 36 Vpk
ETHERNET (FIBER)
PARAMETER FIBER TYPE
100MB MULTI-
MODE
Wavelength 1310 nm
Connector LC
Transmit power –20 dBm
Receiver sensitivity –30 dBm
Power budget 10 dB
Maximum input
power
Typical distance 2 km
Duplex full/half
Redundancy yes
–14 dBm
ETHERNET (10/100 MB TWISTED PAIR)
Modes: 10 MB, 10/100 MB (auto-detect)
Connector: RJ45
SIMPLE NETWORK TIME PROTOCOL (SNTP)
clock synchronization error: <10 ms (typical)
PRECISION TIME PROTOCOL (PTP)
PTP IEEE Std 1588 2008 (version 2)
Power Profile (PP) per IEEE Standard PC37.238TM2011
Slave-only ordinary clock
Peer delay measurement mechanism
PARALLEL REDUNDANCY PROTOCOL (PRP)
(IEC 62439-3 CLAUSE 4, 2012)
Ethernet ports used: 2 and 3
Networks supported: 10/100 MB Ethernet
OTHER
TFTP, HTTP, IEC 60870-5-104, Ethernet Global Data (EGD)
GE Multilin B30 Bus Differential System 2-19
Page 52

2.2 SPECIFICATIONS 2 PRODUCT DESCRIPTION
NOTE
NOTE
NOTE
NOTE
2.2.9 INTER-RELAY COMMUNICATIONS
SHIELDED TWISTED-PAIR INTERFACE OPTIONS
INTERFACE TYPE TYPICAL DISTANCE
RS422 1200 m
G.703 100 m
2
RS422 distance is based on transmitter power and
does not take into consideration the clock source
provided by the user.
LINK POWER BUDGET
EMITTER,
FIBER TYPE
820 nm LED,
Multimode
1300 nm LED,
Multimode
1300 nm ELED,
Singlemode
1300 nm Laser,
Singlemode
1550 nm Laser,
Singlemode
TRANSMIT
POWER
–20 dBm –30 dBm 10 dB
–21 dBm –30 dBm 9 dB
–23 dBm –32 dBm 9 dB
–1 dBm –30 dBm 29 dB
+5 dBm –30 dBm 35 dB
RECEIVED
SENSITIVITY
These power budgets are calculated from the manufacturer’s worst-case transmitter power and worst
case receiver sensitivity.
The power budgets for the 1300 nm ELED are calculated from the manufacturer's transmitter power and
receiver sensitivity at ambient temperature. At
extreme temperatures these values deviate based
on component tolerance. On average, the output
power decreases as the temperature is increased by
a factor 1dB / 5°C.
MAXIMUM OPTICAL INPUT POWER
EMITTER, FIBER TYPE MAX. OPTICAL
820 nm LED, Multimode –7.6 dBm
1300 nm LED, Multimode –11 dBm
1300 nm ELED, Singlemode –14 dBm
1300 nm Laser, Singlemode –14 dBm
1550 nm Laser, Singlemode –14 dBm
INPUT POWER
POWER
BUDGET
TYPICAL LINK DISTANCE
EMITTER TYPE CABLE
820 nm LED,
multimode
1300 nm LED,
multimode
1300 nm ELED,
single mode
1300 nm Laser,
single mode
1550 nm Laser,
single-mode
TYPE
62.5/125 μm ST 1.65 km
50/125 μm ST 1.65 km
62.5/125 μmST 4 km
50/125 μmST 4 km
9/125 μm ST 11.4 km
9/125 μm ST 64 km
9/125 μm ST 105 km
CONNECTOR
TYPE
TYPICAL
DISTANCE
Typical distances listed are based on the following assumptions for system loss. As actual losses
vary from one installation to another, the distance
covered by your system may vary.
CONNECTOR LOSSES (TOTAL OF BOTH ENDS)
ST connector 2 dB
FIBER LOSSES
820 nm multimode 3 dB/km
1300 nm multimode 1 dB/km
1300 nm singlemode 0.35 dB/km
1550 nm singlemode 0.25 dB/km
Splice losses: One splice every 2 km,
at 0.05 dB loss per splice.
SYSTEM MARGIN
3 dB additional loss added to calculations to compensate for
all other losses.
Compensated difference in transmitting and receiving (channel
asymmetry) channel delays using GPS satellite clock: 10 ms
2.2.10 ENVIRONMENTAL
AMBIENT TEMPERATURES
Storage temperature: –40 to 85°C
Operating temperature: –40 to 60°C; the LCD contrast can be
impaired at temperatures less than –
20°C
HUMIDITY
Humidity: operating up to 95% (non-condensing) at
55°C (as per IEC60068-2-30 variant 1, 6
days).
OTHER
Altitude: 2000 m (maximum)
Pollution degree: II
Overvoltage category: II
Ingress protection: IP20 front, IP10 back
Noise: 0 dB
2-20 B30 Bus Differential System GE Multilin
Page 53

2 PRODUCT DESCRIPTION 2.2 SPECIFICATIONS
2.2.11 TYPE TESTS
B30 TYPE TESTS
TEST REFERENCE STANDARD TEST LEVEL
Dielectric voltage withstand EN 60255-5 2.2 kV
Impulse voltage withstand EN 60255-5 5 kV
Damped oscillatory IEC 61000-4-18 / IEC 60255-22-1 2.5 kV CM, 1 kV DM
Electrostatic discharge EN 61000-4-2 / IEC 60255-22-2 Level 3
RF immunity EN 61000-4-3 / IEC 60255-22-3 Level 3
Fast transient disturbance EN 61000-4-4 / IEC 60255-22-4 Class A and B
Surge immunity EN 61000-4-5 / IEC 60255-22-5 Level 3 and 4
Conducted RF immunity EN 61000-4-6 / IEC 60255-22-6 Level 3
Power frequency immunity EN 61000-4-7 / IEC 60255-22-7 Class A and B
Voltage interruption and ripple DC IEC 60255-11 12% ripple, 200 ms interrupts
Radiated and conducted emissions CISPR11 / CISPR22 / IEC 60255-25 Class A
Sinusoidal vibration IEC 60255-21-1 Class 1
Shock and bump IEC 60255-21-2 Class 1
Seismic IEC 60255-21-3 Class 1
Power magnetic immunity IEC 61000-4-8 Level 5
Pulse magnetic immunity IEC 61000-4-9 Level 4
Damped magnetic immunity IEC 61000-4-10 Level 4
Voltage dip and interruption IEC 61000-4-11 0, 40, 70, 80% dips; 250 / 300 cycle interrupts
Damped oscillatory IEC 61000-4-12 2.5 kV CM, 1 kV DM
Conducted RF immunity, 0 to 150 kHz IEC 61000-4-16 Level 4
Voltage ripple IEC 61000-4-17 15% ripple
Ingress protection IEC 60529 IP40 front, IP10 back
Cold IEC 60068-2-1 –40°C for 16 hours
Hot IEC 60068-2-2 85°C for 16 hours
Humidity IEC 60068-2-30 6 days, variant 1
Damped oscillatory IEEE/ANSI C37.90.1 2.5 kV, 1 MHz
RF immunity IEEE/ANSI C37.90.2 20 V/m, 80 MHz to 1 GHz
Safety UL 508 e83849 NKCR
Safety UL C22.2-14 e83849 NKCR7
Safety UL 1053 e83849 NKCR
Safety IEC 60255-27 Insulation: class 1, Pollution degree: 2, Over
voltage cat II
2
2.2.12 PRODUCTION TESTS
THERMAL
Products go through an environmental test based upon an
Accepted Quality Level (AQL) sampling process.
GE Multilin B30 Bus Differential System 2-21
Page 54

2.2 SPECIFICATIONS 2 PRODUCT DESCRIPTION
NOTICE
APPROVALS
2
COMPLIANCE APPLICABLE
CE Low voltage directive EN 60255-5
C-UL-US --- UL 508
EAC Machines and
COUNCIL DIRECTIVE
EMC directive EN 60255-26 / EN 50263
Equipment
ACCORDING TO
EN 61000-6-5
UL 1053
C22.2 No. 14
TR CU 010/2011
EAC
The EAC Technical Regulations (TR) for Machines and Equipment
apply to the Customs Union (CU) of the Russian Federation,
Belarus, and Kazakhstan.
ITEM DESCRIPTION
Country of origin Puerto Rico or Canada; see label on
Date of manufacture See label on rear of UR
Declaration of Conformity and/or
Certificate of Conformity
rear of UR
Available upon request
2.2.13 APPROVALS
MOUNTING
Attach mounting brackets using 20 inch-pounds (±2 inch-pounds)
of torque.
2.2.14 MAINTENANCE
CLEANING
Normally, cleaning is not required; but for situations where dust
has accumulated on the faceplate display, a dry cloth can be used.
To avoid deterioration of electrolytic
capacitors, power up units that are stored
in a de-energized state once per year, for
one hour continuously.
2-22 B30 Bus Differential System GE Multilin
Page 55

3 HARDWARE 3.1 DESCRIPTION
17.56”
[446,02 mm]
9.687”
[246,05 mm]
11.016”
[279,81 mm]
7.460
[189,48 mm
6.960”
[176,78 mm]
19.040”
[483,62 mm]
6.995”
[177,67 mm]
842807A1.CDR
3 HARDWARE 3.1DESCRIPTION 3.1.1 PANEL CUTOUT
a) HORIZONTAL UNITS
The B30 Bus Differential System is available as a 19-inch rack horizontal mount unit with a removable faceplate. The faceplate can be specified as either standard or enhanced at the time of ordering. The enhanced faceplate contains additional
user-programmable pushbuttons and LED indicators.
The modular design allows the relay to be easily upgraded or repaired by a qualified service person. The faceplate is
hinged to allow easy access to the removable modules, and is itself removable to allow mounting on doors with limited rear
depth.
The case dimensions are shown below, along with panel cutout details for panel mounting. When planning the location of
your panel cutout, ensure that provision is made for the faceplate to swing open without interference to or from adjacent
equipment.
The relay must be mounted such that the faceplate sits semi-flush with the panel or switchgear door, allowing the operator
access to the keypad and the RS232 communications port. The relay is secured to the panel with the use of four screws
supplied with the relay.
3
Figure 3–1: B30 HORIZONTAL DIMENSIONS (ENHANCED PANEL)
GE Multilin B30 Bus Differential System 3-1
Page 56

3.1 DESCRIPTION 3 HARDWARE
18.370”
[466,60 mm]
842808A1.CDR
0.280”
[7,11 mm]
Typ. x 4
4.000”
[101,60 mm]
17.750”
[450,85 mm]
CUT-OUT
19.00”
(482.6 mm)
7.00”
(177.8 mm)
Horizontal front view
Horizontal top view (19”, 4 RU)
17.52”
(445.0 mm)
Brackets
repositioned for
switchgear
mounting
10.90”
(276.8 mm)
9.80”
(248.9 mm)
8.97”
(227.8 mm)
17.75”
(450.8 mm)
7.13”
(181.1 mm)
Cutout
18.37”
(466.6 mm)
4.00”
(101.6 mm)
1.57”
(39.8 mm)
4 × 0.28”
(7.1 mm)
diameter
17.72”
(450.1 mm)
14.52”
(368.8 mm)
9.52”
(241.8 mm)
8 × 0.156 Ø
5.00”
(127.0 mm)
0.375”
(9.5 mm)
0.375”
(9.5 mm)
Remote mounting, view from the rear of the panel
Bezel
outline
0.375” (9.5)
1.875”
(47.6)
0.375” (9.5)
4.875”
(121.5 mm)
6.96”
(176.8 mm)
827704B4.CDR
3
Figure 3–2: B30 HORIZONTAL MOUNTING (ENHANCED PANEL)
Figure 3–3: B30 HORIZONTAL MOUNTING AND DIMENSIONS (STANDARD PANEL)
b) VERTICAL UNITS
The B30 Bus Differential System is available as a reduced size (¾) vertical mount unit, with a removable faceplate. The
faceplate can be specified as either standard or enhanced at the time of ordering. The enhanced faceplate contains additional user-programmable pushbuttons and LED indicators.
The modular design allows the relay to be easily upgraded or repaired by a qualified service person. The faceplate is
hinged to allow easy access to the removable modules, and is itself removable to allow mounting on doors with limited rear
depth.
The case dimensions are shown below, along with panel cutout details for panel mounting. When planning the location of
your panel cutout, ensure that provision is made for the faceplate to swing open without interference to or from adjacent
equipment.
The relay must be mounted such that the faceplate sits semi-flush with the panel or switchgear door, allowing the operator
access to the keypad and the RS232 communications port. The relay is secured to the panel with the use of four screws
supplied with the relay.
3-2 B30 Bus Differential System GE Multilin
Page 57

3 HARDWARE 3.1 DESCRIPTION
7.48”
(190.0 mm)
15.00”
(381.0 mm)
13.56”
(344.4 mm)
1.38”
(35.2 mm)
9.58”
(243.4 mm)
7.00”
(177.7 mm)
4.00”
(101.6 mm)
7.10”
(180.2 mm)
13.66”
(347.0 mm)
14.03”
(356.2 mm)
0.20”
(5.1 mm)
1.55”
(39.3 mm)
4 Places
0.213” (5.41 mm)
Front of Panel
Mounting Bracket
Vertical Enhanced Front View
Vertical Enhanced Top View
Vertical Enhanced Mounting Panel
CUTOUT
Front of Panel
Reference only
Terminal Blocks
Front
Bezel
Front of Panel
Mounting Bracket
Vertical Enhanced Side View
843809A2.cdr
3
Figure 3–4: B30 VERTICAL DIMENSIONS (ENHANCED PANEL)
GE Multilin B30 Bus Differential System 3-3
Page 58

3
13.72"
(348.5 mm)
7.00"
(177.8 mm)
13.50"
(342.9 mm)
Front of
panel
Front
bezel
Panel
Mounting bracket
1.57”
(39.9 mm)
4.00
(101.6)
7.13”
(181.1 mm)
0.46”
(11.7 mm)
13.65”
(346.7 mm)
14.40”
(365.8 mm)
0.213" (5.4 mm),
4 places
Vertical front view
Vertical side view
843755A4.CDR
Vertical panel mounting
1.85"
(47.0 mm)
9.00"
(228.6 mm)
7.00"
(177.8 mm)
Terminal blocks
Mounting bracket
Panel shown for
reference only
Vertical bottom view
3.1 DESCRIPTION 3 HARDWARE
Figure 3–5: B30 VERTICAL MOUNTING AND DIMENSIONS (STANDARD PANEL)
For side mounting B30 devices with the enhanced front panel, see the following documents available on the UR DVD and
the GE Digital Energy website:
• GEK-113180: UR-Series UR-V Side-Mounting Front Panel Assembly Instructions
• GEK-113181: Connecting a Remote UR-V Enhanced Front Panel to a Vertical UR Device Instruction Sheet
• GEK-113182: Connecting a Remote UR-V Enhanced Front Panel to a Vertically-Mounted Horizontal UR Device
Instruction Sheet
For side mounting B30 devices with the standard front panel, use the following figures.
3-4 B30 Bus Differential System GE Multilin
Page 59

3 HARDWARE 3.1 DESCRIPTION
3
Figure 3–6: B30 VERTICAL SIDE MOUNTING INSTALLATION (STANDARD PANEL)
GE Multilin B30 Bus Differential System 3-5
Page 60
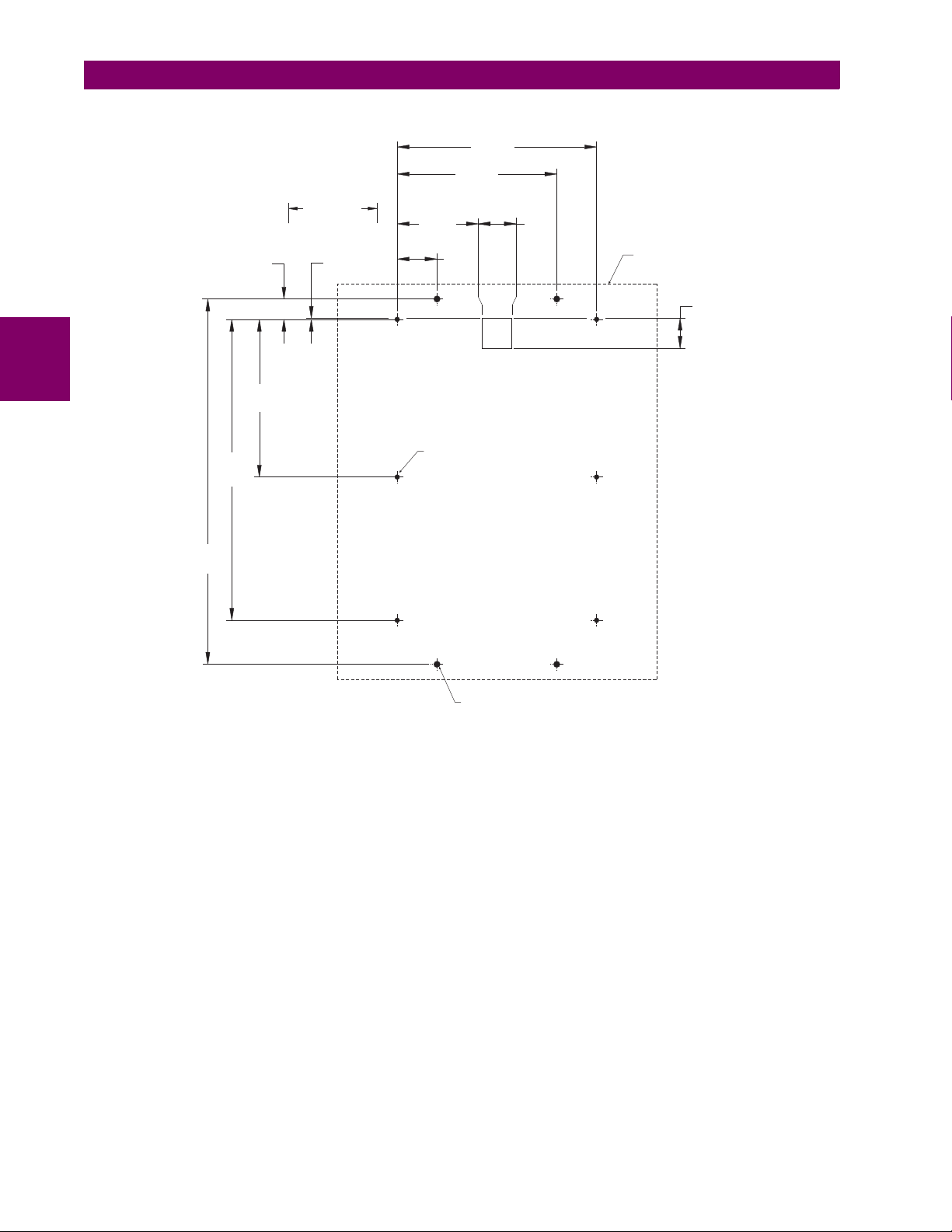
3
CUT-OUT
1.33"
(33.9)
2.83"
(71.9)
6.66"
(169.2)
12.20"
(309.9)
0.159" DIA. (6 PLACES)
(4.0)
0.213" DIA. (5.4)
(4 PLACES)
SEE HOLES MARKED 'X'
INCHES
MILLIMETERS
5.33"
(135.4)
PANEL SHOWN FOR
REFERENCE ONLY
(VIEWED FROM FRONT)
'X''X'
'X''X'
1.00"
(25.4)
1.00"
(25.4)
10.05
(255.3)
"
0.04
(1.0)
"
0.68"
(17.3)
5.27
(133.8)
"
843753A3.cdr
3.1 DESCRIPTION 3 HARDWARE
Figure 3–7: B30 VERTICAL SIDE MOUNTING REAR DIMENSIONS (STANDARD PANEL)
3-6 B30 Bus Differential System GE Multilin
Page 61

3 HARDWARE 3.1 DESCRIPTION
XW V UT S PN ML K J H DGF BR
8
4
7
3
6
2
5
1
b
8
4
7
3
6
2
5
1
a
abc abcabc abcabc
4
3
2
1
4
3
2
1
b
a
IN
ACT3
Tx1
Tx2
Rx1
Rx2
Tx1
Tx2
abc
Optional
direct
input/output
module
Optional
contact
input/output
module
CPU module
(T module shown)
Optional
contact
input/output
module
CT/VT
module
Power
supply
module
836789A1.CDR
Optional
CT/VT or
contact
input/output
module
Optional
contact
input/output
module
Optional
CT/VT or
contact
input/output
module
®
®
Model:
Mods:
Wiring Diagram:
Inst. Manual:
Serial Number:
Firmware:
Mfg. Date:
PO Num:
Item Num:
B30H00HCHF8HH6HM8AP6AU8AW6H
000
See manual
1601-0109
MAZB98000029
D
2012/01/05
600001234.56
Control Power:
Contact Inputs:
Contact Outputs:
88-300V DC @ 35W / 77-265V AC @ 35VA
300V DC Max 10mA
Refer to Instruction Manual
RATINGS:
B30
- M A A B 9 7 0 0 0 0 9 9 -
Bus Differential Relay
GE Multilin
- M A A B 9 7 0 0 0 0 9 9 -
LISTED
52TL
IND.CONT. EQ.
E83849
LK3
ACT2
LK2
ACT1
LK1
WARNING
NOTICE
3.1.2 REAR TERMINAL LAYOUT
3
The relay follows a convention with respect to terminal number assignments which are three characters long assigned in
order by module slot position, row number, and column letter. Two-slot wide modules take their slot designation from the
first slot position (nearest to CPU module) which is indicated by an arrow marker on the terminal block. See the following
figure for an example of rear terminal assignments.
Figure 3–8: REAR TERMINAL VIEW
Do not touch any rear terminals while the relay is energized.
The small form-factor pluggable ports (SFPs) are pluggable transceivers. Do not use non-validated
transceivers or install validated transceivers in the wrong Ethernet slot, else damage can occur.
Figure 3–9: EXAMPLE OF MODULES IN F AND H SLOTS
GE Multilin B30 Bus Differential System 3-7
Page 62

F3
F5
F4
F6
AC or DC
DC
( DC ONLY )
Dry
B30
BUS DIFFERENTIAL RELAY
1
Power
Supply
9
CPU
MODULE ARRANGEMENT
* Optional
JU
MXLW KVBHTD
N
GSP FR
8 CT6
Inputs/
outputs
8
CT
*
6
Inputs/
outputs
*
8
CT
*
6
Inputs/
outputs
*
F1
F2
CRITICAL
FAILURE
48 VDC
OUTPUT
CONTROL
POWER
HI
LO
POWER SUPPLY
1
FILTER
SURGE
B3a
B1b
B8a
B6b
B8b
B6a
B3b
B1a
B2b
B5b
CONTACT INPUT N5a
CONTACT INPUT N7a
CONTACT INPUT N5c
CONTACT INPUT N7c
CONTACT INPUT N6a
CONTACT INPUT N8a
CONTACT INPUT N6c
CONTACT INPUT N8c
COMMON N5b
COMMON N7b
SURGE
N6a
N8a
N5b
N7b
N8b
N5a
N7a
N6c
N8c
N5c
N7c
6A
N1
N2
N3
N4
N1a
N2b
N1c
N1b
N2c
N2a
N4a
N4c
N3b
N3a
N4b
N3c
DIGITAL INPUTS/OUTPUTS
I
V
I
V
DIGITAL INPUTS/OUTPUTS
6H
CONTACT INPUT H7a
CONTACT INPUT H7c
CONTACT INPUT H8a
CONTACT INPUT H8c
COMMON H7b
H8a
H7b
H7a
H8c
H7c
H1b
H2b
H3b
H4b
H5b
H6b
H1a
H2a
H3a
H4a
H5a
H6a
H1c
H2c
H3c
H4c
H5c
H6c
SURGE
H8b
H1
H5
H2
H6
H3
H4
I
V
I
V
I
V
I
V
I
V
I
V
Wet
DIGITAL INPUTS/OUTPUTS
6H
CONTACT INPUT U7a
CONTACT INPUT U7c
CONTACT INPUT U8a
CONTACT INPUT U8c
COMMON U7b
U8a
U7b
U7a
U8c
U7c
U1b
U2b
U3b
U4b
U5b
U6b
U1a
U2a
U3a
U4a
U5a
U6a
U1c
U2c
U3c
U4c
U5c
U6c
SURGE
U8b
U1
U5
U2
U6
U3
U4
I
V
I
V
I
V
I
V
I
V
I
V
836784A2.CDR
GROUND BUS
No. 10AWG
Minimum
MODULES MUST BE
GROUNDED IF
TERMINAL IS
PROVIDED
com
100BaseFX
D1a
D2a
D4b
D3a
D4a
IRIG-B
Input
RS485
COM 2
PORT 1
CPU T
Tx2
Rx2
Tx1
Rx1
BNC
Fibre
Optic
*
Ground at
Remote
Device
Shielded
twisted pairs
Co-axial
F7c
F5c
F5a
F5b
F7b
F3c
F1c
F6a
F2b
F7a
F2a
F6b
F6c
F2c
F1a
F1b
F3a
F3b
CURRENT INPUTS
8H / 8J
IA
IA
IC
IC
IB
IB
IA5
IA5
IC5
IC5
IB5
IB5
IA1
IA1
IC1
IC1
IB1
IB1
7c
5c
5a
5b
7b
3c
1c
6a
2b
7a
2a
6b
6c
2c
1a
S
S
S
S
S
S
S
S
S
S
S
S
S
S
S
S
S
S
1b
3a
3b
IA
IA
IC
IC
IB
IB
IA5
IA5
IC5
IC5
IB5
IB5
IA1
IA1
IC1
IC1
IB1
IB1
L7c
L5c
L5a
L5b
L7b
L3c
L1c
L6a
L2b
L7a
L2a
L6b
L6c
L2c
L1a
L1b
L3a
L3b
CURRENT INPUTS
8H/ 8J
IA
IA
IC
IC
IB
IB
IA5
IA5
IC5
IC5
IB5
IB5
IA1
IA1
IC1
IC1
IB1
IB1
NOTE: This diagram is based on the following order code:
B30-T00-HCL-F8F-H6H-L8H-N6A-S8H-U6H
This diagram provides an example of how the device
is wired, not specifically how to wire the device. Please
refer to the Instruction Manual for additional details on
wiring based on various configurations.
CURRENT INPUTS
8H/ 8J
100BaseFX
100BaseFX
Tx3
Rx3
PORT 2
PORT 3
OPEN DELTA
VT CONNECTION (ABC)
F8c
F8a
F5a
F5c
F7c
F6a
F7a
F6c
VX
VA
VB
VC
VOLTAGE INPUTS
VX
VA
VB
VC
F5a
F5c
F7c
F6a
F7a
F6c
VA
VB
VC
VOLTAGE INPUTS
VA
VB
VC
ABC
3.2 WIRING 3 HARDWARE
3.2WIRING 3.2.1 TYPICAL WIRING
3
3-8 B30 Bus Differential System GE Multilin
Figure 3–10: TYPICAL WIRING DIAGRAM (T MODULE SHOWN FOR CPU)
Page 63

3 HARDWARE 3.2 WIRING
NOTICE
NOTICE
3.2.2 DIELECTRIC STRENGTH
The dielectric strength of the UR-series module hardware is shown in the following table:
Table 3–1: DIELECTRIC STRENGTH OF UR-SERIES MODULE HARDWARE
MODULE
TYPE
1 Power supply High (+); Low (+); (–) Chassis 2000 V AC for 1 minute
1 Power supply 48 V DC (+) and (–) Chassis 2000 V AC for 1 minute
1 Power supply Relay terminals Chassis 2000 V AC for 1 minute
2 Reserved N/A N/A N/A
3 Reserved N/A N/A N/A
4 Reserved N/A N/A N/A
5 Analog inputs/outputs All except 8b Chassis < 50 V DC
6 Digital contact inputs/
7
8 CT/VT All Chassis 2000 V AC for 1 minute
9 CPU All Chassis 2000 V AC for 1 minute
MODULE FUNCTION TERMINALS DIELECTRIC STRENGTH
FROM TO
outputs
G.703 All except 2b, 3a, 7b, 8a Chassis 2000 V AC for 1 minute
RS422 All except 6a, 7b, 8a Chassis < 50 V DC
Filter networks and transient protection clamps are used in the hardware to prevent damage caused
by high peak voltage transients, radio frequency interference (RFI), and electromagnetic interference
(EMI). These protective components can be damaged by application of the ANSI/IEEE C37.90 specified test voltage for a period longer than the specified one minute.
All Chassis 2000 V AC for 1 minute
(AC)
3
3.2.3 CONTROL POWER
Control power supplied to the relay must be connected to the matching power supply range of the
relay. If voltage is applied to the wrong terminals, damage can occur.
The B30 relay, like almost all electronic relays, contains electrolytic capacitors. These capacitors are
well-known to deteriorate over time if voltage is not applied periodically. Deterioration can be avoided
by powering up the relay at least once a year.
The power supply module can be ordered for two possible voltage ranges, and the UR can be ordered with or without a
redundant power supply module option. Each range has a dedicated input connection for proper operation. The ranges are
as shown below (see the Technical specifications section of chapter 2 for additional details):
• Low (LO) range: 24 to 48 V (DC only) nominal
• High (HI) range: 125 to 250 V nominal
The power supply module provides power to the relay and supplies power for dry contact input connections.
The power supply module provides 48 V DC power for dry contact input connections and a critical failure relay (see the
Typical wiring diagram earlier). The critical failure relay is a form-C device that is energized once control power is applied
and the relay has successfully booted up with no critical self-test failures. If on-going self-test diagnostic checks detect a
critical failure (see the Self-test errors section in chapter 7) or control power is lost, the relay is de-energize.
For high reliability systems, the B30 has a redundant option in which two B30 power supplies are placed in parallel on the
bus. If one of the power supplies become faulted, the second power supply assumes the full load of the relay without any
interruptions. Each power supply has a green LED on the front of the module to indicate it is functional. The critical fail relay
of the module also indicates a faulted power supply.
GE Multilin B30 Bus Differential System 3-9
Page 64

3.2 WIRING 3 HARDWARE
AC or DC
NOTE:
14 gauge stranded
wire with suitable
disconnect devices
is recommended.
Heavy copper conductor
or braided wire
Switchgear
ground bus
UR-series
protection system
FILTER
SURGE
–
+
LOW
+
HIGH
B8b B8a B6a B6b B5b
CONTROL
POWER
827247A1.CDR
NOTICE
An LED on the front of the control power module shows the status of the power supply:
LED INDICATION POWER SUPPLY
CONTINUOUS ON OK
ON / OFF CYCLING Failure
OFF Failure
3
Figure 3–11: CONTROL POWER CONNECTION
3.2.4 CT/VT MODULES
A CT/VT module can have voltage or current inputs on channels 1 through 4 inclusive, or channels 5 through 8 inclusive.
Channels 1 and 5 are intended for connection to phase A, and are labeled as such in the relay. Likewise, channels 2 and 6
are intended for connection to phase B, and channels 3 and 7 are intended for connection to phase C.
Channels 4 and 8 are intended for connection to a single-phase source. For voltage inputs, these channel are labelled as
auxiliary voltage (VX). For current inputs, these channels are intended for connection to a CT between system neutral and
ground, and are labelled as ground current (IG).
Verify that the connection made to the relay terminals for nominal current of 1 A or 5 A matches the
secondary rating of the connected CTs. Unmatched CTs can result in equipment damage or inadequate protection.
To connect the module, size 12 American Wire Gauge (AWG) is commonly used; the maximum size is 10 AWG.
CT/VT modules can be ordered with a standard ground current input that is the same as the phase current input. Each AC
current input has an isolating transformer and an automatic shorting mechanism that shorts the input when the module is
withdrawn from the chassis. There are no internal ground connections on the current inputs. Current transformers with 1 to
50000 A primaries and 1 A or 5 A secondaries can be used.
CT/VT modules with a sensitive ground input are also available. The ground CT input of the sensitive ground modules is 10
times more sensitive than the ground CT input of standard CT/VT modules. However, the phase CT inputs and phase VT
inputs are the same as those of regular CT/VT modules.
The above modules have enhanced diagnostics that can automatically detect CT/VT hardware failure and take the relay
out of service.
CT connections for both ABC and ACB phase rotations are identical as shown in the Typical wiring diagram.
The exact placement of a zero-sequence core balance CT to detect ground fault current is shown as follows. Twisted-pair
cabling on the zero-sequence CT is recommended.
3-10 B30 Bus Differential System GE Multilin
Page 65

3 HARDWARE 3.2 WIRING
Ground connection to neutral
must be on the source side
UNSHIELDED CABLE
LOAD
ABCN G
Ground
outside CT
Source
LOAD
SHIELDED CABLE
996630A6.CDR
ABC
Source
To ground;
must be on
load side
Stress cone
shields
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
1a
1b
1c
2a
2b
2c
3a
4a
5a
6a
7a
8a
3b
4b
5c
6c
7c
8c
3c
4c
Current inputs
8F, 8G, 8L, and 8M modules (4 CTs and 4 VTs)
Voltage inputs
VA
VB
VC
VX
VA
VB
VC
VX
IA
IC
IB
IG
IA5
IC5
IB5
IG5
IA1
IC1
IB1
IG1
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
1a
5a
1b
5b
1c
5c
2a
6a
2b
6b
2c
6c
3a
7a
4a
8a
3b
7b
4b
8b
3c
7c
4c
8c
Current inputs
842766A3.CDR
IA
IA
IC
IC
IB
IB
IG
IG
IA5
IA5
IC5
IC5
IB5
IB5
IG5
IG5
IA1
IA1
IC1
IC1
IB1
IB1
IG1
IG1
8H, 8J, 8N, and 8R modules (8 CTs)
Figure 3–12: ZERO-SEQUENCE CORE BALANCE CT INSTALLATION
The phase voltage channels are used for most metering and protection purposes. The auxiliary voltage channel is used as
input for the synchrocheck and volts-per-hertz features.
Substitute the tilde “~” symbol with the slot position of the module in the following figure.
3
Figure 3–13: CT/VT MODULE WIRING
GE Multilin B30 Bus Differential System 3-11
Page 66

3.2 WIRING 3 HARDWARE
3.2.5 PROCESS BUS MODULES
The B30 can be ordered with a process bus interface module. This module is designed to interface with the GE Multilin
HardFiber system, allowing bidirectional IEC 61850 fiber optic communications with up to eight HardFiber merging units,
known as Bricks. The HardFiber system has been designed to integrate seamlessly with the existing UR-series applications, including protection functions, FlexLogic, metering, and communications.
The IEC 61850 process bus system offers the following benefits:
• Reduces labor associated with design, installation, and testing of protection and control applications using the B30 by
reducing the number of individual copper terminations
• Integrates seamlessly with existing B30 applications, since the IEC 61850 process bus interface module replaces the
traditional CT/VT modules
• Communicates using open standard IEC 61850 messaging
3
For additional details on the HardFiber system, see GE publication GEK-113658: HardFiber Process Bus System Instruction Manual.
3.2.6 CONTACT INPUTS AND OUTPUTS
Every contact input/output module has 24 terminal connections. They are arranged as three terminals per row, with eight
rows in total. A given row of three terminals can be used for the outputs of one relay. For example, for form-C relay outputs,
the terminals connect to the normally open (NO), normally closed (NC), and common contacts of the relay. For a form-A
output, there are options of using current or voltage detection for feature supervision, depending on the module ordered.
The terminal configuration for contact inputs is different for the two applications.
The contact inputs are grouped with a common return. The B30 has two versions of grouping: four inputs per common
return and two inputs per common return. When a contact input/output module is ordered, four inputs per common is used.
If the inputs must be isolated per row, then two inputs per common return should be selected (4D module).
The tables and diagrams on the following pages illustrate the module types (6A, etc.) and contact arrangements that can be
ordered for the relay. Since an entire row is used for a single contact output, the name is assigned using the module slot
position and row number. However, since there are two contact inputs per row, these names are assigned by module slot
position, row number, and column position.
Some form-A / solid-state relay outputs include circuits to monitor the DC voltage across the output contact when it is open,
and the DC current through the output contact when it is closed. Each of the monitors contains a level detector whose output is set to logic “On = 1” when the current in the circuit is above the threshold setting. The voltage monitor is set to “On =
1” when there is a voltage across open contact (the detector allows a current of about 1 to 2.5 mA), and the current monitor
is set to “On = 1” when the current flowing through the closed contact exceeds about 80 to 100 mA. The voltage monitor is
intended to check the health of the overall trip circuit, and the current monitor can be used to seal-in the output contact until
an external contact has interrupted current flow. If enabled, the current monitoring can be used as a seal-in signal to ensure
that the form-A contact does not attempt to break the energized inductive coil circuit and weld the output contacts.
Block diagrams are shown as follows for form-A and solid-state relay outputs with optional voltage monitor, optional current
monitor, and with no monitoring. The actual values shown for contact output 1 are the same for all contact outputs. Form-A
contact output with or without a current or voltage monitoring option is not polarity sensitive. The polarity shown in the figure
is required for solid-state contact output connection.
3-12 B30 Bus Differential System GE Multilin
Page 67

3 HARDWARE 3.2 WIRING
Load
I
~#a
~#b
~#c
V
827862A4.CDR
+
+
+
+
+
a) Voltage with optional
current monitoring
Voltage monitoring only
Load
I
V
Both voltage and current monitoring
Load
I
V
b) Current with optional
voltage monitoring
Current monitoring only Both voltage and current monitoring
(external jumper a-b is required)
Load
V
Load
c) No monitoring
~#a
~#b
~#c
~#a
~#b
~#c
~#a
~#b
~#c
~#a
~#b
~#c
I
WARNING
NOTE
NOTE
NOTICE
3
Figure 3–14: FORM-A AND SOLID-STATE CONTACT OUTPUTS WITH VOLTAGE AND CURRENT MONITORING
The operation of voltage and current monitors is reflected with the corresponding FlexLogic operands (CONT OP # VON,
CONT OP # VOFF, and CONT OP # ION) which can be used in protection, control, and alarm logic. The typical application of
the voltage monitor is breaker trip circuit integrity monitoring; a typical application of the current monitor is seal-in of the
control command.
Refer to the Digital elements section of chapter 5 for an example of how form-A and solid-state relay contacts can be
applied for breaker trip circuit integrity monitoring.
Consider relay contacts unsafe to touch when the unit is energized.
USE OF FORM-A AND SOLID-STATE RELAY OUTPUTS IN HIGH IMPEDANCE CIRCUITS
For form-A and solid-state relay output contacts internally equipped with a voltage measuring circuit across the contact, the circuit has an impedance that can cause a problem when used in conjunction with external high input
impedance monitoring equipment such as modern relay test set trigger circuits. These monitoring circuits may continue to read the form-A contact as being closed after it has closed and subsequently opened, when measured as
an impedance.
The solution is to use the voltage measuring trigger input of the relay test set, and connect the form-A contact
through a voltage-dropping resistor to a DC voltage source. If the 48 V DC output of the power supply is used as a
source, a 500 Ω, 10 W resistor is appropriate. In this configuration, the voltage across either the form-A contact or
the resistor can be used to monitor the state of the output.
Wherever a tilde “~” symbol appears, substitute with the slot position of the module; wherever a number sign “#”
appears, substitute the contact number
When current monitoring is used to seal-in the form-A and solid-state relay contact outputs, the FlexLogic operand driving the contact output should be given a reset delay of 10 ms to prevent damage
of the output contact (in situations when the element initiating the contact output is bouncing, at values in the region of the pickup value).
GE Multilin B30 Bus Differential System 3-13
Page 68

3.2 WIRING 3 HARDWARE
Table 3–2: CONTACT INPUT AND OUTPUT MODULE ASSIGNMENTS
~6A MODULE ~6B MODULE ~6C MODULE ~6D MODULE
TERMINAL
ASSIGNMENT
~1 Form-A ~1 Form-A ~1 Form-C ~1a, ~1c 2 Inputs
~2 Form-A ~2 Form-A ~2 Form-C ~2a, ~2c 2 Inputs
~3 Form-C ~3 Form-C ~3 Form-C ~3a, ~3c 2 Inputs
~4 Form-C ~4 Form-C ~4 Form-C ~4a, ~4c 2 Inputs
~5a, ~5c 2 Inputs ~5 Form-C ~5 Form-C ~5a, ~5c 2 Inputs
~6a, ~6c 2 Inputs ~6 Form-C ~6 Form-C ~6a, ~6c 2 Inputs
~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs ~7 Form-C ~7a, ~7c 2 Inputs
~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs ~8 Form-C ~8a, ~8c 2 Inputs
OUTPUT OR
INPUT
TER MINA L
ASSIGNMENT
OUTPUT OR
INPUT
3
~6E MODULE ~6F MODULE ~6G MODULE ~6H MODULE
TERMINAL
ASSIGNMENT
~1Form-C ~1 Fast Form-C ~1Form-A ~1Form-A
~2Form-C ~2 Fast Form-C ~2Form-A ~2Form-A
~3Form-C ~3 Fast Form-C ~3Form-A ~3Form-A
~4Form-C ~4 Fast Form-C ~4Form-A ~4Form-A
~5a, ~5c 2 Inputs ~5 Fast Form-C ~5a, ~5c 2 Inputs ~5 Form-A
~6a, ~6c 2 Inputs ~6 Fast Form-C ~6a, ~6c 2 Inputs ~6 Form-A
~7a, ~7c 2 Inputs ~7 Fast Form-C ~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs
~8a, ~8c 2 Inputs ~8 Fast Form-C ~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs
OUTPUT OR
INPUT
TER MINA L
ASSIGNMENT
OUTPUT TERMINAL
TERMINAL
ASSIGNMENT
ASSIGNMENT
OUTPUT TERMINAL
OUTPUT OR
INPUT
ASSIGNMENT
TER MINA L
ASSIGNMENT
OUTPUT
OUTPUT OR
INPUT
~6K MODULE ~6L MODULE ~6M MODULE ~6N MODULE
TERMINAL
ASSIGNMENT
~1 Form-C ~1Form-A ~1Form-A ~1Form-A
~2 Form-C ~2Form-A ~2Form-A ~2Form-A
~3 Form-C ~3Form-C ~3Form-C ~3Form-A
~4 Form-C ~4Form-C ~4Form-C ~4Form-A
~5 Fast Form-C ~5a, ~5c 2 Inputs ~5Form-C ~5a, ~5c 2 Inputs
~6 Fast Form-C ~6a, ~6c 2 Inputs ~6Form-C ~6a, ~6c 2 Inputs
~7 Fast Form-C ~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs
~8 Fast Form-C ~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs
~6P MODULE ~6R MODULE ~6S MODULE ~6T MODULE
TERMINAL
ASSIGNMENT
~1 Form-A ~1Form-A ~1Form-A ~1Form-A
~2 Form-A ~2Form-A ~2Form-A ~2Form-A
~3 Form-A ~3Form-C ~3Form-C ~3Form-A
~4 Form-A ~4Form-C ~4Form-C ~4Form-A
~5 Form-A ~5a, ~5c 2 Inputs ~5Form-C ~5a, ~5c 2 Inputs
~6 Form-A ~6a, ~6c 2 Inputs ~6Form-C ~6a, ~6c 2 Inputs
~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs
~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs
OUTPUT TERMINAL
OUTPUT OR
INPUT
ASSIGNMENT
TER MINA L
ASSIGNMENT
OUTPUT OR
INPUT
OUTPUT OR
INPUT
TERMINAL
ASSIGNMENT
TERMINAL
ASSIGNMENT
OUTPUT OR
INPUT
OUTPUT OR
INPUT
TER MINA L
ASSIGNMENT
TER MINA L
ASSIGNMENT
OUTPUT OR
INPUT
OUTPUT OR
INPUT
3-14 B30 Bus Differential System GE Multilin
Page 69

3 HARDWARE 3.2 WIRING
~6U MODULE ~6V MODULE ~67 MODULE ~4A MODULE
TERMINAL
ASSIGNMENT
~1 Form-A ~1 Form-A ~1Form-A ~1Not Used
~2 Form-A ~2 Form-A ~2Form-A ~2 Solid-State
~3 Form-A ~3 Form-C ~3Form-A ~3Not Used
~4 Form-A ~4 2 Outputs ~4Form-A ~4 Solid-State
~5 Form-A ~5a, ~5c 2 Inputs ~5Form-A ~5Not Used
~6 Form-A ~6a, ~6c 2 Inputs ~6Form-A ~6 Solid-State
~7a, ~7c 2 Inputs ~7a, ~7c 2 Inputs ~7Form-A ~7Not Used
~8a, ~8c 2 Inputs ~8a, ~8c 2 Inputs ~8Form-A ~8 Solid-State
OUTPUT OR
INPUT
TER MINA L
ASSIGNMENT
OUTPUT OR
INPUT
TERMINAL
ASSIGNMENT
OUTPUT TERMINAL
ASSIGNMENT
OUTPUT
~4B MODULE ~4C MODULE ~4D MODULE ~4L MODULE
TERMINAL
ASSIGNMENT
~1Not Used ~1 Not Used ~1a, ~1c 2 Inputs ~1 2 Outputs
~2 Solid-State ~2 Solid-State ~2a, ~2c 2 Inputs ~2 2 Outputs
~3Not Used ~3 Not Used ~3a, ~3c 2 Inputs ~3 2 Outputs
~4 Solid-State ~4 Solid-State ~4a, ~4c 2 Inputs ~4 2 Outputs
~5Not Used ~5 Not Used ~5a, ~5c 2 Inputs ~5 2 Outputs
~6 Solid-State ~6 Solid-State ~6a, ~6c 2 Inputs ~6 2 Outputs
~7Not Used ~7 Not Used ~7a, ~7c 2 Inputs ~72 Outputs
~8 Solid-State ~8 Solid-State ~8a, ~8c 2 Inputs ~8Not Used
OUTPUT TERMINAL
ASSIGNMENT
OUTPUT TERMINAL
ASSIGNMENT
OUTPUT TERMINAL
ASSIGNMENT
OUTPUT
3
GE Multilin B30 Bus Differential System 3-15
Page 70

3
842762A3.CDR
3.2 WIRING 3 HARDWARE
Figure 3–15: CONTACT INPUT AND OUTPUT MODULE WIRING (1 of 2)
3-16 B30 Bus Differential System GE Multilin
Page 71

3 HARDWARE 3.2 WIRING
DIGITAL I/O
6K
1b
2b
3b
4b
5b
7b
6b
8b
1a
2a
3a
4a
5a
7a
6a
8a
1c
2c
3c
4c
5c
7c
6c
8c
1
5
7
2
6
8
3
4
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
I
V
I
V
I
V
I
V
I
V
I
V
DIGITAL I/O
6P
1b
2b
3b
4b
5b
6b
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
6c
1
5
2
6
3
4
8a
7b
7a
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
CONTACT IN 7a
CONTACT IN 7c
CONTACT IN 8a
CONTACT IN 8c
COMMON 7b
SURGE
8c
7c
8b
DIGITAL I/O
6U
1b
2b
3b
4b
5b
6b
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
6c
1
5
2
6
3
4
8a
7b
7a
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
CONTACT IN 7a
CONTACT IN 7c
CONTACT IN 8a
CONTACT IN 8c
COMMON 7b
SURGE
8c
7c
8b
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
I
V
I
V
DIGITAL I/O
6M
1b
2b
3b
4b
5b
6b
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
6c
1
5
2
6
3
4
8a
7b
7a
CONTACT IN 7a
CONTACT IN 7c
CONTACT IN 8a
CONTACT IN 8c
COMMON 7b
SURGE
8c
7c
8b
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
DIGITAL I/O
6S
1b
2b
3b
4b
5b
6b
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
6c
1
5
2
6
3
4
8a
7b
7a
CONTACT IN 7a
CONTACT IN 7c
CONTACT IN 8a
CONTACT IN 8c
COMMON 7b
SURGE
8c
7c
8b
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
I
V
I
V
I
V
I
V
DIGITAL I/O
6N
1b
2b
3b
4b
6c
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
5b
1
2
3
4
8a
7b
7a
CONTACT IN 7a
CONTACT IN 5a
CONTACT IN 7c
CONTACT IN 5c
CONTACT IN 8a
CONTACT IN 6a
CONTACT IN 8c
CONTACT IN 6c
COMMON 7b
COMMON 5b
SURGE
8c
7c
8b
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
DIGITAL I/O
6T
1b
2b
3b
4b
6c
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
5b
1
2
3
4
8a
7b
7a
CONTACT IN 7a
CONTACT IN 5a
CONTACT IN 7c
CONTACT IN 5c
CONTACT IN 8a
CONTACT IN 6a
CONTACT IN 8c
CONTACT IN 6c
COMMON 7b
COMMON 5b
SURGE
8c
7c
8b
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
I
V
I
V
DIGITAL I/O
6L
1b
2b
3b
4b
6c
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
5b
1
2
3
4
8a
7b
7a
CONTACT IN 7a
CONTACT IN 5a
CONTACT IN 7c
CONTACT IN 5c
CONTACT IN 8a
CONTACT IN 6a
CONTACT IN 8c
CONTACT IN 6c
COMMON 7b
COMMON 5b
SURGE
8c
7c
8b
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
DIGITAL I/O
6R
1b
2b
3b
4b
6c
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
5b
1
2
3
4
8a
7b
7a
CONTACT IN 7a
CONTACT IN 5a
CONTACT IN 7c
CONTACT IN 5c
CONTACT IN 8a
CONTACT IN 6a
CONTACT IN 8c
CONTACT IN 6c
COMMON 7b
COMMON 5b
SURGE
8c
7c
8b
842763A2.CDR
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
~
DIGITAL I/O
6V
1b
2b
3b
4b
6c
1a
2a
3a
4a
5a
6a
1c
2c
3c
4c
5c
5b
1
2
3
4a
8a
7b
7a
CONTACT IN 7a
CONTACT IN 5a
CONTACT IN 7c
CONTACT IN 5c
CONTACT IN 8a
CONTACT IN 6a
CONTACT IN 8c
CONTACT IN 6c
COMMON 7b
COMMON 5b
SURGE
8c
7c
8b
~
4c
I
V
I
V
NOTICE
3
GE Multilin B30 Bus Differential System 3-17
Figure 3–16: CONTACT INPUT AND OUTPUT MODULE WIRING (2 of 2)
For proper functionality, observe the polarity shown in the figures for all contact input and output connections.
Page 72

3.2 WIRING 3 HARDWARE
827741A5.CDR
24 to 250 V
(Wet) (Dry)
Contact input 1
Contact input 2
Contact input 3
Surge
Contact input 4
~7a
Common
~7b
~7c
~8a
~8b
~8c
Contact input 1
Contact input 2
Contact input 3
Surge
Contact input 4
~7a
Common
~7b
~7c
~8a
~8b
~8c
Control power
Surge
B5b
Filter
B8b
B6b
B6a
B8a
Critical failure
B1b
48 V DC output
B3b
B1a
B2b
B3a
HI+
LO+
Power supply module
Terminals from type 6B
contact input/output module
Terminals from type 6B
contact input/output module
CONTACT INPUTS
A dry contact has one side connected to terminal B3b. This is the positive 48 V DC voltage rail supplied by the power supply module. The other side of the dry contact is connected to the required contact input terminal. Each contact input group
has its own common (negative) terminal which must be connected to the DC negative terminal (B3a) of the power supply
module. When a dry contact closes, a current of 1 to 3 mA flows through the associated circuit.
A wet contact has one side connected to the positive terminal of an external DC power supply. The other side of this contact
is connected to the required contact input terminal. If a wet contact is used, then the negative side of the external source
must be connected to the relay common (negative) terminal of each contact group. The maximum external source voltage
for this arrangement is 300 V DC.
The voltage threshold at which each group of four contact inputs detects a closed contact input is programmable as
17 V DC for 24 V sources, 33 V DC for 48 V sources, 84 V DC for 110 to 125 V sources, and 166 V DC for 250 V sources.
3
Figure 3–17: DRY AND WET CONTACT INPUT CONNECTIONS
Wherever a tilde “~” symbol appears, substitute with the slot position of the module.
There is no provision in the relay to detect a DC ground fault on 48 V DC control power external output. We recommend
using an external DC supply.
3-18 B30 Bus Differential System GE Multilin
Page 73

3 HARDWARE 3.2 WIRING
842749A1.CDR
50 to 70 mA
3 mA
25 to 50 ms
current
time
CONTACT INPUT 1 AUTO-BURNISH = OFF
= OFFCONTACT INPUT 2 AUTO-BURNISH
CONTACT INPUT 1 AUTO-BURNISH
CONTACT INPUT 2 AUTO-BURNISH
= ON
= OFF
CONTACT INPUT 1 AUTO-BURNISH
CONTACT INPUT 2 AUTO-BURNISH
= OFF
= ON
CONTACT INPUT 1 AUTO-BURNISH
CONTACT INPUT 2 AUTO-BURNISH
= ON
= ON
842751A1.CDR
USE OF CONTACT INPUTS WITH AUTO-BURNISHING
The contact inputs sense a change of the state of the external device contact based on the measured current. When external devices are located in a harsh industrial environment (either outdoor or indoor), their contacts can be exposed to various types of contamination. Normally, there is a thin film of insulating sulfidation, oxidation, or contaminates on the surface
of the contacts, sometimes making it difficult or impossible to detect a change of the state. This film must be removed to
establish circuit continuity – an impulse of higher than normal current can accomplish this.
The contact inputs with auto-burnish create a high current impulse when the threshold is reached to burn off this oxidation
layer as a maintenance to the contacts. Afterwards the contact input current is reduced to a steady-state current. The
impulse has a 5 second delay after a contact input changes state.
Figure 3–18: CURRENT THROUGH CONTACT INPUTS WITH AUTO-BURNISHING
Regular contact inputs limit current to less than 3 mA to reduce station battery burden. In contrast, contact inputs with autoburnishing allow currents up to 50 to 70 mA at the first instance when the change of state was sensed. Then, within 25 to
50 ms, this current is slowly reduced to 3 mA as indicated above. The 50 to 70 mA peak current burns any film on the contacts, allowing for proper sensing of state changes. If the external device contact is bouncing, the auto-burnishing starts
when external device contact bouncing is over.
Another important difference between the auto-burnishing input module and the regular input modules is that only two contact inputs have common ground, as opposed to four contact inputs sharing one common ground (refer to the Contact Input
and Output Module Wiring diagrams). This is beneficial when connecting contact inputs to separate voltage sources. Consequently, the threshold voltage setting is also defined per group of two contact inputs.
The auto-burnish feature can be disabled or enabled using the DIP switches found on each daughter card. There is a DIP
switch for each contact, for a total of 16 inputs.
3
Figure 3–19: AUTO-BURNISH DIP SWITCHES
GE Multilin B30 Bus Differential System 3-19
Page 74

3
NOTE
3.2 WIRING 3 HARDWARE
The auto-burnish circuitry has an internal fuse for safety purposes. During regular maintenance, check the autoburnish functionality using an oscilloscope.
3-20 B30 Bus Differential System GE Multilin
Page 75

3 HARDWARE 3.2 WIRING
NOTE
842764A1.CDR
3.2.7 TRANSDUCER INPUTS AND OUTPUTS
Transducer input modules can receive input signals from external DCmA output transducers (dcmA In) or resistance temperature detectors (RTDs). Hardware and software are provided to receive signals from these external transducers and
convert these signals into a digital format for use as required.
Transducer output modules provide DC current outputs in several standard DCmA ranges. Software is provided to configure virtually any analog quantity used in the relay to drive the analog outputs.
Every transducer input/output module has a total of 24 terminal connections. These connections are arranged as three terminals per row with a total of eight rows. A given row can be used for either inputs or outputs, with terminals in column "a"
having positive polarity and terminals in column "c" having negative polarity. Since an entire row is used for a single input/
output channel, the name of the channel is assigned using the module slot position and row number.
Each module also requires that a connection from an external ground bus be made to terminal 8b. The current outputs
require a twisted-pair shielded cable, where the shield is grounded at one end only. The following figure illustrates the transducer module types (5A, 5C, 5D, 5E, and 5F) and channel arrangements that can be ordered for the relay.
Wherever a tilde “~” symbol appears, substitute with the slot position of the module.
3
Figure 3–20: TRANSDUCER INPUT/OUTPUT MODULE WIRING
The following figure show how to connect RTDs.
GE Multilin B30 Bus Differential System 3-21
Page 76

3
Three-wire shielded cable
RTD terminals
Maximum total lead resistance:
25 ohms for Platinum RTDs
Route cable in separate conduit from
current carrying conductors
RTD
859736A1.CDR
RTD terminals
RTD
RTD
For RTD
RTD
SURGE
~1
~1 &
~2
~2
~8b
~1a
~1b
~2a
Hot
Hot
Return
Comp
Comp
~2c
~1c
3.2 WIRING 3 HARDWARE
Figure 3–21: RTD CONNECTIONS
3-22 B30 Bus Differential System GE Multilin
Page 77
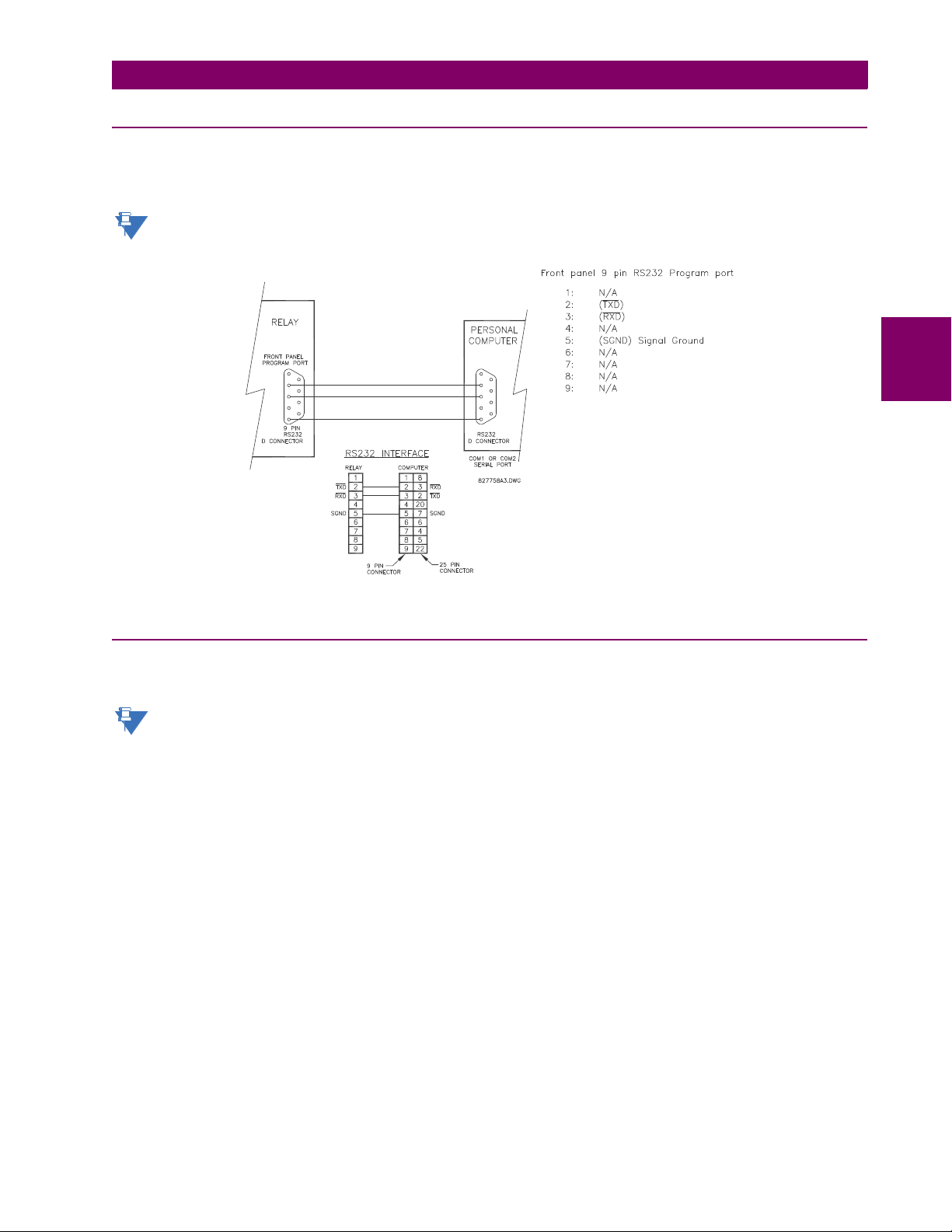
3 HARDWARE 3.2 WIRING
NOTE
NOTE
3.2.8 RS232 FACEPLATE PORT
A 9-pin RS232C serial port is located on the B30 faceplate for programming with a computer. All that is required to use this
interface is a computer running the EnerVista UR Setup software provided with the relay. Cabling for the RS232 port is
shown in the following figure for both 9-pin and 25-pin connectors.
The baud rate for this port is fixed at 19200 bps.
3
Figure 3–22: RS232 FACEPLATE PORT CONNECTION
3.2.9 CPU COMMUNICATION PORTS
a) OVERVIEW
In addition to the faceplate RS232 port, the B30 provides a rear RS485 communication port.
The CPU modules do not require a surge ground connection.
GE Multilin B30 Bus Differential System 3-23
Page 78
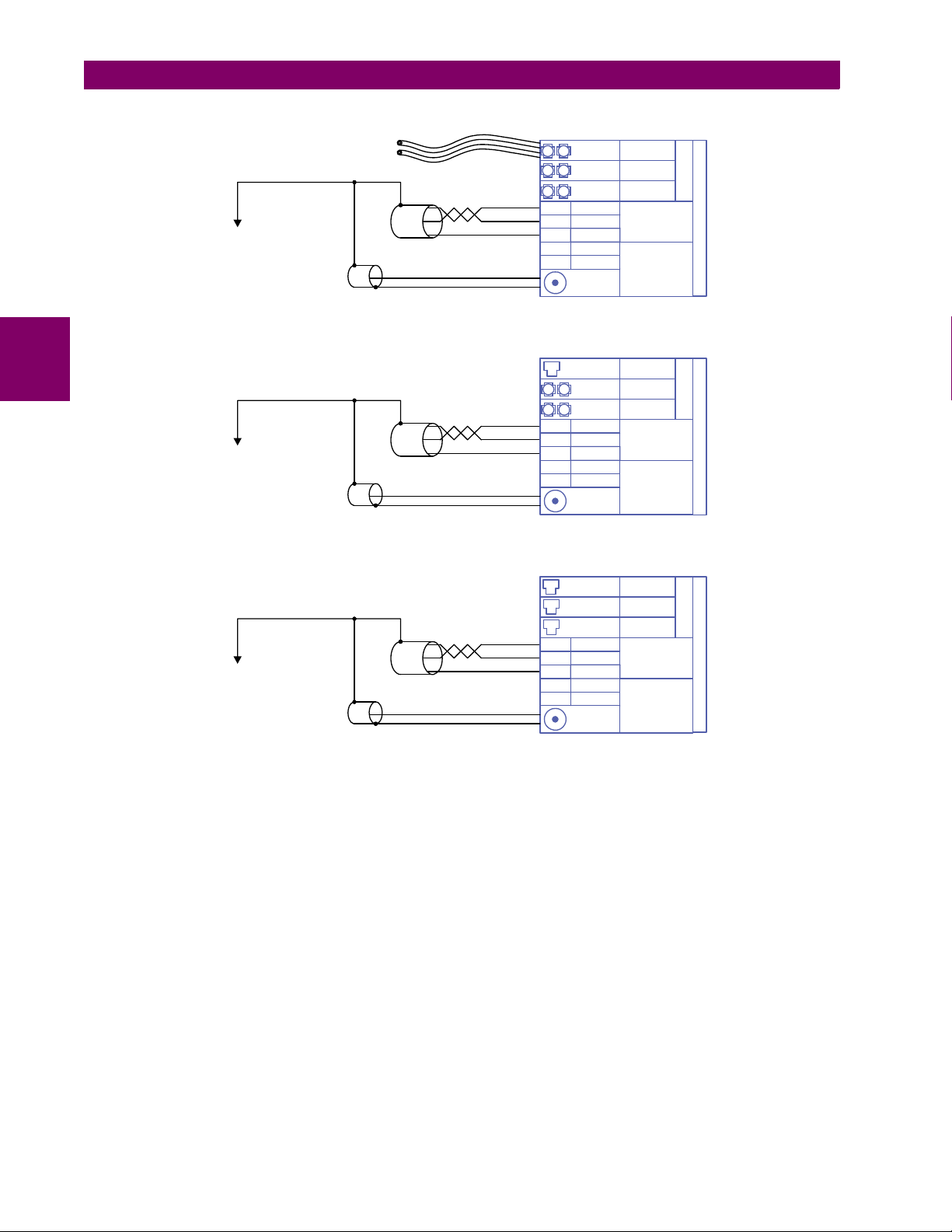
3
842722A3.CDR
100Base-T
COMMON
+
+
—
—
D1a
D2a
D3a
D4b
D4a
BNC
IRIG-B
input
CPU V
Co-axial cable
Shielded
twisted-pairs
Ground at
remote
device
RS485
COM2
100Base-T
100Base-T
COMMON
+
+
—
—
D1a
D2a
D3a
D4b
D4a
BNC
IRIG-B
input
CPUU
Co-axial cable
Shielded
twisted-pairs
Ground at
remote
device
RS485
COM2
100Base-T
100Base-FX
Port 1
Port 2
100Base-FX
Tx1
Rx1
COMMON
+
+
—
—
D1a
D2a
D3a
D4b
D4a
BNC
IRIG-B
input
CPU T
Co-axial cable
Shielded
twisted-pairs
MM fiber-
optic cable
Ground at
remote
device
RS485
COM2
100Base-FX
100Base-FX
Tx2
Rx2
Tx3
Rx3
Tx1
Rx1
Port 3
Port 1
Port 2
Port 3
Port 1
Port 2
Port 3
100Base-FX
Tx1
Rx1
3.2 WIRING 3 HARDWARE
Figure 3–23: CPU MODULE COMMUNICATIONS WIRING
b) RS485 PORT
RS485 data transmission and reception are accomplished over a single twisted pair with transmit and receive data alternating over the same two wires. Through the use of the port, continuous monitoring and control from a remote computer,
SCADA system, or PLC is possible.
To minimize errors from noise, the use of shielded twisted pair wire is recommended. Correct polarity must also be
observed. For instance, the relays must be connected with all RS485 “+” terminals connected together, and all RS485 “–”
terminals connected together. Though data is transmitted over a two-wire twisted pair, all RS485 devices require a shared
reference, or common voltage. This common voltage is implied to be a power supply common. Some systems allow the
shield (drain wire) to be used as common wire and to connect directly to the B30 COM terminal (#3); others function correctly only if the common wire is connected to the B30 COM terminal, but insulated from the shield.
To avoid loop currents, ground the shield at only one point. If other system considerations require the shield to be grounded
at more than one point, install resistors (typically 100 ohms) between the shield and ground at each grounding point. Each
relay needs to be daisy-chained to the next one in the link. A maximum of 32 relays can be connected in this manner without exceeding driver capability. For larger systems, additional serial channels must be added. It is also possible to use commercially available repeaters to have more than 32 relays on a single channel. Avoid star or stub connections entirely.
3-24 B30 Bus Differential System GE Multilin
Page 79

3 HARDWARE 3.2 WIRING
SCADA / PLC / computer
Optocoupler
Data
UR-series device
Shield
827757AA.CDR
Last device
Z (*)
T
Z (*) Terminating impedance at
T
each end (typically 120 Ω and 1 nF)
Twisted pair
RS485 +
RS485 –
COMP 485COM
Relay
Relay
Ground shield at SCADA / PLC /
computer only or at
UR-series device only
Data
Optocoupler
Up to 32 devices,
maximum 4000 feet
(1200 m)
Z (*)
T
RS485 +
RS485 –
COMP 485COM
RS485 +
RS485 –
COMP 485COM
COM
NOTE
Lightning strikes and ground surge currents can cause large momentary voltage differences between remote ends of the
communication link. For this reason, surge protection devices are internally provided at both communication ports. An isolated power supply with an optocoupled data interface also acts to reduce noise coupling. To ensure maximum reliability, all
equipment should have similar transient protection devices installed.
Terminate both ends of the RS485 circuit with an impedance as shown below.
3
c) 100BASE-FX FIBER OPTIC PORTS
Ensure that the dust covers are installed when the fiber is not in use. Dirty or scratched connectors can lead to high
The fiber optic communication ports allow for fast and efficient communications between relays at 100 Mbps. Optical fiber
losses on a fiber link.
can be connected to the relay supporting a wavelength of 1310 nm in multi-mode.
GE Multilin B30 Bus Differential System 3-25
Figure 3–24: RS485 SERIAL CONNECTION
Page 80

3.2 WIRING 3 HARDWARE
UR-series device
BNC (in)
Receiver
RG58/59 coaxial cable
GPS satellite system
GPS connection
IRIG-B (–)
4A
+
827756A8.CDR
IRIG-B
time code generator
(DC-shift or
amplitude modulated
signal can be used)
4B
IRIG-B (+)
UR-series device
BNC (in)
Receiver
Twisted-pair cable
GPS satellite system
GPS connection
IRIG-B (–)
4A
+
IRIG-B
time code generator
(DC-shift or
amplitude modulated
signal can be used)
4B
IRIG-B (+)
NOTE
IRIG-B is a standard time code format that allows stamping of events to be synchronized among connected devices. The
IRIG-B code allows time accuracies of up to 100 ns. Using the IRIG-B input, the B30 operates an internal oscillator with 1
µs resolution and accuracy. The IRIG time code formats are serial, width-modulated codes that can be either DC level
shifted or amplitude modulated (AM). Third party equipment is available for generating the IRIG-B signal; this equipment
can use a GPS satellite system to obtain the time reference so that devices at different geographic locations can be synchronized.
3
3.2.10 IRIG-B
Figure 3–25: OPTIONS FOR THE IRIG-B CONNECTION
Using an amplitude modulated receiver causes errors up to 1 ms in event time-stamping.
3-26 B30 Bus Differential System GE Multilin
Page 81

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
842006A2.CDR
Tx
Tx
Tx
Tx
UR 1
UR 2
UR 3
UR 4
Rx
Rx
Rx
Rx
842007A3.CDR
Tx1
UR 1
Tx2
Rx1
Rx2
Tx1
UR 2
Tx2
Rx1
Rx2
Tx1
UR 3
Tx2
Rx1
Rx2
Tx1
UR 4
Tx2
Rx1
Rx2
3.3DIRECT INPUT AND OUTPUT COMMUNICATIONS 3.3.1 DESCRIPTION
The direct inputs and outputs feature makes use of the type 7 series of communications modules, which allow direct messaging between UR devices. These communications modules are outlined in the table later in this section.
The communications channels are normally connected in a ring configuration as shown in the following figure. The transmitter of one module is connected to the receiver of the next module. The transmitter of this second module is then connected to the receiver of the next module in the ring. This is continued to form a communications ring. The figure illustrates
a ring of four UR-series relays with the following connections: UR1-Tx to UR2-Rx, UR2-Tx to UR3-Rx, UR3-Tx to UR4-Rx,
and UR4-Tx to UR1-Rx. A maximum of 16 UR-series relays can be connected in a single ring
Figure 3–26: DIRECT INPUT AND OUTPUT SINGLE CHANNEL CONNECTION
The interconnection for dual-channel type 7 communications modules is shown as follows. Two channel modules allow for
a redundant ring configuration. That is, two rings can be created to provide an additional independent data path. The
required connections are: UR1-Tx1 to UR2-Rx1, UR2-Tx1 to UR3-Rx1, UR3-Tx1 to UR4-Rx1, and UR4-Tx1 to UR1-Rx1
for the first ring; and UR1-Tx2 to UR4-Rx2, UR4-Tx2 to UR3-Rx2, UR3-Tx2 to UR2-Rx2, and UR2-Tx2 to UR1-Rx2 for the
second ring.
3
Figure 3–27: DIRECT INPUT AND OUTPUT DUAL CHANNEL CONNECTION
The following diagram shows the connection for three UR-series relays using two independent communication channels.
UR1 and UR3 have single type 7 communication modules; UR2 has a dual-channel module. The two communication channels can be of different types, depending on the type 7 modules used. To allow the direct input and output data to cross-
over from channel 1 to channel 2 on UR2, the
DIRECT I/O CHANNEL CROSSOVER setting should be “Enabled” on UR2. This
forces UR2 to forward messages received on Rx1 out Tx2, and messages received on Rx2 out Tx1.
GE Multilin B30 Bus Differential System 3-27
Page 82

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
842013A2.CDR
Channel 1
Channel 2
Tx1
UR 2
Tx2
Rx1
Rx2
Tx
UR 1
Rx
Tx
UR 3
Rx
NOTE
3
Figure 3–28: DIRECT INPUT AND OUTPUT SINGLE/DUAL CHANNEL COMBINATION CONNECTION
The interconnection requirements are described in further detail in this section for each specific variation of type 7 communications module. These modules are listed in the following table. All fiber modules use ST type connectors.
Not all the direct input and output communications modules outlined in the table are applicable to the B30. Use your
order code with the tables in chapter 2 to determine applicable options.
Table 3–3: CHANNEL COMMUNICATION OPTIONS (Sheet 1 of 2)
MODULE SPECIFICATION
2A C37.94SM, 1300 nm, single-mode, ELED, 1 channel single-mode
2B C37.94SM, 1300 nm, single-mode, ELED, 2 channel single-mode
2E Bi-phase, 1 channel
2F Bi-phase, 2 channel
2G IEEE C37.94, 820 nm, 128 kbps, multi-mode, LED, 1 channel
2H IEEE C37.94, 820 nm, 128 kbps, multi-mode, LED, 2 channels
72 1550 nm, single-mode, laser, 1 channel
73 1550 nm, single-mode, laser, 2 channels
74 Channel 1 - RS422; channel 2 - 1550 nm, single-mode, laser
75 Channel 1 - G.703; channel 2 - 1550 nm, single-mode, laser
76 IEEE C37.94, 820 nm, 64 kbps, multi-mode, LED, 1 channel
77 IEEE C37.94, 820 nm, 64 kbps, multi-mode, LED, 2 channels
7A 820 nm, multi-mode, LED, 1 channel
7B 1300 nm, multi-mode, LED, 1 channel
7C 1300 nm, single-mode, ELED, 1 channel
7D 1300 nm, single-mode, laser, 1 channel
7E Channel 1: G.703, Channel 2: 820 nm, multi-mode
7F Channel 1: G.703, Channel 2: 1300 nm, multi-mode
7G Channel 1: G.703, Channel 2: 1300 nm, single-mode ELED
7H 820 nm, multi-mode, LED, 2 channels
7I 1300 nm, multi-mode, LED, 2 channels
7J 1300 nm, single-mode, ELED, 2 channels
7K 1300 nm, single-mode, LASER, 2 channels
7L Channel 1: RS422, channel: 820 nm, multi-mode, LED
7M Channel 1: RS422, channel 2: 1300 nm, multi-mode, LED
7N Channel 1: RS422, channel 2: 1300 nm, single-mode, ELED
7P Channel 1: RS422, channel 2: 1300 nm, single-mode, laser
3-28 B30 Bus Differential System GE Multilin
Page 83

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
7A, 7B, and
7C modules
7H, 7I, and
7J modules
1 channel 2 channels
Rx1
Rx1
Rx2
Tx1 Tx1
Tx2
831719A3.CDR
1 channel 2 channels
Rx1 Rx1
Rx2
Tx1 Tx1
Tx2
831720A5.CDR
72 and 7D
modules
73 and 7K
modules
CAUTION
Table 3–3: CHANNEL COMMUNICATION OPTIONS (Sheet 2 of 2)
MODULE SPECIFICATION
7Q Channel 1: G.703, channel 2: 1300 nm, single-mode, laser
7R G.703, 1 channel
7S G.703, 2 channels
7T RS422, 1 channel
7V RS422, 2 channels, 2 clock inputs
7W RS422, 2 channels
3.3.2 FIBER: LED AND ELED TRANSMITTERS
The following figure shows the configuration for the 7A, 7B, 7C, 7H, 7I, and 7J fiber-only modules.
3
Figure 3–29: LED AND ELED FIBER MODULES
The following figure shows the configuration for the 72, 73, 7D, and 7K fiber-laser module.
Figure 3–30: LASER FIBER MODULES
Observing any fiber transmitter output can injure the eye.
3.3.3 FIBER-LASER TRANSMITTERS
GE Multilin B30 Bus Differential System 3-29
Page 84

3
NOTICE
3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
When using a laser Interface, attenuators can be necessary to ensure that you do not exceed the
maximum optical input power to the receiver.
3-30 B30 Bus Differential System GE Multilin
Page 85

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
842773A3.CDR
~8a
~8b
7S
Rx +
Tx +
Shield
Tx –
Shield
Rx –
Tx –
Rx +
Tx +
Rx –
G.703 communications
~2b
~6a
~7a
~1b
~1a
~3a
~6b
~7b
~2a
~3b
G.703
channel 2
G.703
channel 1
Surge
Surge
X8a
X8b
7S
Rx +
Tx +
Shield
Tx –
Shield
Rx –
Tx –
Rx +
Tx +
Rx –
G.703 communications
X2b
X6a
X7a
X1b
X1a
X3a
X6b
X7b
X2a
X3b
G.703
channel 2
G.703
channel 1
Surge
Surge
831727A5.CDR
X8a
X8b
7S
Rx +
Tx +
Shield
Tx –
Shield
Rx –
Tx –
Rx +
Tx +
Rx –
G.703 communications
X2b
X6a
X7a
X1b
X1a
X3a
X6b
X7b
X2a
X3b
G.703
channel 2
G.703
channel 1
Surge
Surge
NOTE
3.3.4 G.703 INTERFACE
a) DESCRIPTION
The following figure shows the 64K ITU G.703 co-directional interface configuration.
The G.703 module is fixed at 64 kbps. The SETTINGS > PRODUCT SETUP > DIRECT I/O > DIRECT I/O DATA
RATE setting is not applicable to this module.
AWG 24 twisted shielded pair is recommended for external connections, with the shield grounded only at one end. Connecting the shield to pin X1a or X6a grounds the shield since these pins are internally connected to ground. Thus, if pin X1a
or X6a is used to ground the shield at one end, do not ground the shield at the other end. This interface module is protected
by surge suppression devices.
3
Figure 3–31: G.703 INTERFACE CONFIGURATION
The following figure shows the typical pin interconnection between two G.703 interfaces. For the actual physical arrangement of these pins, see the Rear terminal assignments section earlier in this chapter. All pin interconnections are to be
maintained for a connection to a multiplexer.
Figure 3–32: TYPICAL PIN INTERCONNECTION BETWEEN TWO G.703 INTERFACES
Pin nomenclature can differ from one manufacturer to another. Therefore, it is not uncommon to see pinouts numbered TxA, TxB, RxA and RxB. In such cases, it can be assumed that “A” is equivalent to “+” and “B” is equivalent
to “–”.
b) G.703 SELECTION SWITCH PROCEDURES
1. With the power to the relay off, remove the G.703 module (7R or 7S) as follows. Record the original location of the
module to help ensure that the same or replacement module is inserted into the correct slot.
2. Simultaneously pull the ejector/inserter clips located at the top and at the bottom of each module in order to release the
module for removal.
3. Remove the module cover screw.
4. Remove the top cover by sliding it towards the rear and then lift it upwards.
5. Set the timing selection switches (channel 1, channel 2) to the desired timing modes.
GE Multilin B30 Bus Differential System 3-31
Page 86

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
Cover screw
Top cover
Bottom cover
Ejector/inserter clip
Ejector/inserter clip
Timing selection
switches
Channel 1
Channel 2
FRONT
REAR
831774A3.CDR
6. Replace the top cover and the cover screw.
7. Re-insert the G.703 module. Take care to ensure that the correct module type is inserted into the correct slot position.
The ejector/inserter clips located at the top and at the bottom of each module must be in the disengaged position as
the module is smoothly inserted into the slot. Once the clips have cleared the raised edge of the chassis, engage the
clips simultaneously. When the clips have locked into position, the module is fully inserted.
3
Figure 3–33: G.703 TIMING SELECTION SWITCH SETTING
Table 3–4: G.703 TIMING SELECTIONS
SWITCHES FUNCTION
S1 OFF → octet timing disabled
S5 and S6 S5 = OFF and S6 = OFF → loop timing mode
ON → octet timing 8 kHz
S5 = ON and S6 = OFF → internal timing mode
S5 = OFF and S6 = ON → minimum remote loopback mode
S5 = ON and S6 = ON → dual loopback mode
c) G.703 OCTET TIMING
If octet timing is enabled (ON), this 8 kHz signal is asserted during the violation of bit 8 (LSB) necessary for connecting to
higher order systems. When B30s are connected back-to-back, octet timing is disabled (OFF).
d) G.703 TIMING MODES
There are two timing modes for the G.703 module: internal timing mode and loop timing mode (default).
• Internal Timing Mode: The system clock is generated internally. Therefore, the G.703 timing selection should be in
the internal timing mode for back-to-back (UR-to-UR) connections. For back-to-back connections, set for octet timing
(S1 = OFF) and timing mode to internal timing (S5 = ON and S6 = OFF).
• Loop Timing Mode: The system clock is derived from the received line signal. Therefore, the G.703 timing selection
should be in loop timing mode for connections to higher order systems. For connection to a higher order system (UR-
3-32 B30 Bus Differential System GE Multilin
Page 87

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
842752A2.CDR
Internal timing mode
Loop timing mode
(factory default)
DMR
DMX
G7X
G7R
DMR = Differential Manchester Receiver
DMX = Differential Manchester Transmitter
G7X = G.703 Transmitter
G7R = G.703 Receiver
842774A1.CDR
DMR
DMX
G7X
G7R
DMR = Differential Manchester Receiver
DMX = Differential Manchester Transmitter
G7X = G.703 Transmitter
G7R = G.703 Receiver
842775A1.CDR
to-multiplexer, factory defaults), set to octet timing (S1 = ON) and set timing mode to loop timing (S5 = OFF and S6 =
OFF).
The switch settings for the internal and loop timing modes are shown below:
e) G.703 TEST MODES
In minimum remote loopback mode, the multiplexer is enabled to return the data from the external interface without any
processing to assist in diagnosing G.703 line-side problems irrespective of clock rate. Data enters from the G.703 inputs,
passes through the data stabilization latch which also restores the proper signal polarity, passes through the multiplexer
and then returns to the transmitter. The differential received data is processed and passed to the G.703 transmitter module
after which point the data is discarded. The G.703 receiver module is fully functional and continues to process data and
passes it to the differential Manchester transmitter module. Since timing is returned as it is received, the timing source is
expected to be from the G.703 line side of the interface.
Figure 3–34: G.703 MINIMUM REMOTE LOOPBACK MODE
In dual loopback mode, the multiplexers are active and the functions of the circuit are divided into two with each receiver/
transmitter pair linked together to deconstruct and then reconstruct their respective signals. Differential Manchester data
enters the Differential Manchester receiver module and then is returned to the differential Manchester transmitter module.
Likewise, G.703 data enters the G.703 receiver module and is passed through to the G.703 transmitter module to be
returned as G.703 data. Because of the complete split in the communications path and because, in each case, the clocks
are extracted and reconstructed with the outgoing data, in this mode there must be two independent sources of timing. One
source lies on the G.703 line side of the interface while the other lies on the differential Manchester side of the interface.
3
GE Multilin B30 Bus Differential System 3-33
Figure 3–35: G.703 DUAL LOOPBACK MODE
Page 88

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
~
~
~
~
~
~
~
~
~
~
~
~
~
~
Shield
Shield
COM
Tx +
Tx +
Tx –
Tx –
Rx –
Rx –
Rx +
Rx +
3b
5b
2a
4a
6a
7b
8b
Clock
RS422
channel 1
RS422
channel 2
Surge
3a
5a
4b
6b
7a
2b
8a
Inter-relay communications 7W
842776A3.CDR
Dual-channel RS422 module
~
~
~
~
~
Shield
Tx +
Tx –
Rx –
Rx +
3b
2a
6a
RS422
3a
4b
~
~
~
~
COM
8b
Clock
Surge
7a
2b
8a
Inter-relay comms. 7T
Single-channel RS422 module
~ indicates the slot position
831728A5.CDR
W8a
7T
Shield
Tx –
Rx –
Tx +
Rx +
RS422 communications
W4b
W3a
W3b
W6a
W2a
RS422
channel 1
Surge
+
–
W7a
W8b
Clock
Common
W2b
COM
W8a
7T
Shield
Tx –
Rx –
Tx +
Rx +
RS422 communications
W4b
W3a
W3b
W6a
W2a
RS422
channel 1
Surge
+
–
W7a
W8b
Clock
Common
W2b
COM
+
–
64 or 128 kbps
3.3.5 RS422 INTERFACE
a) DESCRIPTION
There are two RS422 inter-relay communications modules available: single-channel RS422 (module 7T) and dual-channel
RS422 (module 7W). The modules can be configured to run at 64 kbps or 128 kbps. AWG 20-24 twisted shielded pair cable
is recommended for external connections. These modules are protected by optically-isolated surge suppression devices.
The shield pins (6a and 7b) are internally connected to the ground pin (8a). Proper shield termination is as follows:
• Site 1: Terminate shield to pins 6a or 7b or both.
• Site 2: Terminate shield to COM pin 2b.
Match the clock terminating impedance with the impedance of the line.
3
The following figure shows the typical pin interconnection between two single-channel RS422 interfaces installed in slot W.
All pin interconnections are to be maintained for a connection to a multiplexer.
b) TWO-CHANNEL APPLICATION VIA MULTIPLEXERS
The RS422 interface can be used for single channel or two channel applications over SONET/SDH or multiplexed systems.
When used in single-channel applications, the RS422 interface links to higher order systems in a typical fashion observing
transmit (Tx), receive (Rx), and send timing (ST) connections. However, when used in two-channel applications, certain criteria must be followed since there is one clock input for the two RS422 channels. The system functions correctly when the
following connections are observed and your data module has a terminal timing feature. Terminal timing is a common feature to most synchronous data units that allows the module to accept timing from an external source. Using the terminal
timing feature, two channel applications can be achieved if these connections are followed: The send timing outputs from
the multiplexer (data module 1), connects to the clock inputs of the UR–RS422 interface in the usual fashion. In addition,
the send timing outputs of data module 1 is also paralleled to the terminal timing inputs of data module 2. By using this configuration, the timing for both data modules and both UR–RS422 channels are derived from a single clock source. As a
result, data sampling for both of the UR–RS422 channels is synchronized via the send timing leads on data module 1 as
shown below. If the terminal timing feature is not available or this type of connection is not desired, the G.703 interface is a
viable option that does not impose timing restrictions.
3-34 B30 Bus Differential System GE Multilin
Figure 3–36: RS422 INTERFACE CONNECTIONS
Figure 3–37: TYPICAL PIN INTERCONNECTION BETWEEN TWO RS422 INTERFACES
Page 89

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
Data module 1
Data module 2
Signal name
Signal name
SD(A) - Send data
TT(A) - Terminal timing
TT(B) - Terminal timing
SD(B) - Send data
RD(A) - Received data
RD(A) - Received data
SD(A) - Send data
SD(B) - Send data
RD(B) - Received data
RD(B) - Received data
RS(A) - Request to send (RTS)
RS(A) - Request to send (RTS)
RT(A) - Receive timing
CS(A) - Clear To send
CS(A) - Clear To send
RT(B) - Receive timing
CS(B) - Clear To send
CS(B) - Clear To send
Local loopback
Local loopback
Remote loopback
Remote loopback
Signal ground
Signal ground
ST(A) - Send timing
ST(A) - Send timing
ST(B) - Send timing
ST(B) - Send timing
RS(B) - Request to send (RTS)
RS(B) - Request to send (RTS)
831022A3.CDR
W
7a
W
2b
W
8a
7W
Shld.
Shld.
Tx1(+)
Tx2(+)
Tx1(-)
Tx2(-)
Rx1(+)
Rx2(+)
+
com
Rx1(-)
Rx2(-)
–
INTER-RELAY COMMUNICATIONS
W
3a
W
5b
W
5a
W
3b
W
2a
W
6a
W
6b
W
7b
W
8b
W
4b
W
4a
RS422
CHANNEL 1
RS422
CHANNEL 2
CLOCK
SURGE
831733A1.CDR
Tx Clock
Tx Data
3
Figure 3–38: TIMING CONFIGURATION FOR RS422 TWO-CHANNEL, THREE-TERMINAL APPLICATION
Data module 1 provides timing to the B30 RS422 interface via the ST(A) and ST(B) outputs. Data module 1 also provides
timing to data module 2 TT(A) and TT(B) inputs via the ST(A) and AT(B) outputs. The data module pin numbers have been
omitted in the figure above since they vary by manufacturer.
c) TRANSMIT TIMING
The RS422 interface accepts one clock input for transmit timing. It is important that the rising edge of the 64 kHz transmit
timing clock of the multiplexer interface is sampling the data in the center of the transmit data window. Therefore, it is important to confirm clock and data transitions to ensure proper system operation. For example, the following figure shows the
positive edge of the Tx clock in the center of the Tx data bit.
GE Multilin B30 Bus Differential System 3-35
Figure 3–39: CLOCK AND DATA TRANSITIONS
Page 90
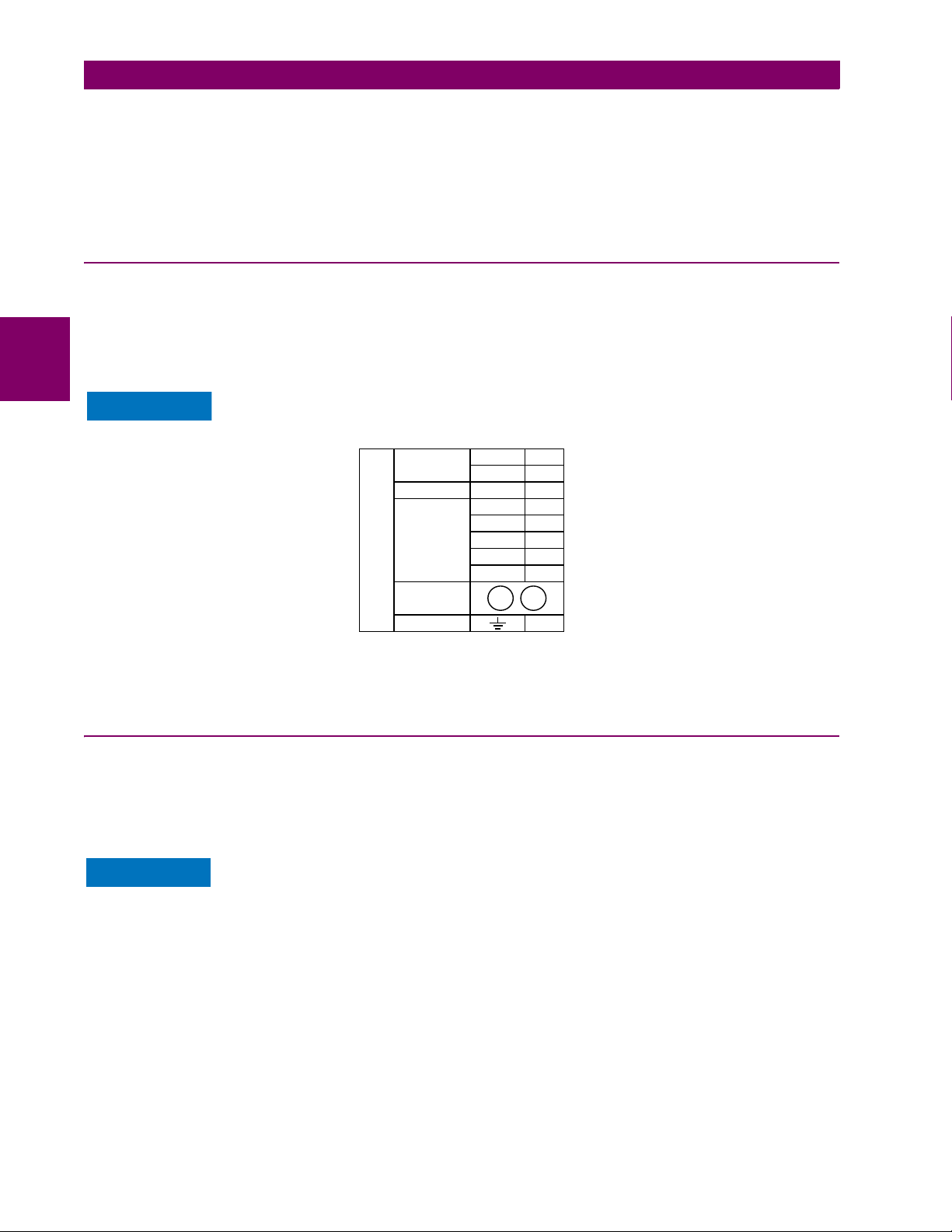
3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
NOTICE
Tx2
Rx2
842777A2.CDR
~8a
7L, 7M, 7N,
7P, and 74
Shield
Tx –
Rx –
Tx +
Rx +
RS422
communications
~4b
~3a
~3b
~6a
~2a
RS422
channel 1
Surge
+
–
~7a
~8b
Clock
channel 1
Common
~2b
COM
Fiber
channel 2
NOTICE
d) RECEIVE TIMING
The RS422 interface utilizes NRZI-MARK modulation code and; therefore, does not rely on an Rx clock to recapture data.
NRZI-MARK is an edge-type, invertible, self-clocking code.
To recover the Rx clock from the data-stream, an integrated DPLL (digital phase lock loop) circuit is utilized. The DPLL is
driven by an internal clock, which is 16-times over-sampled, and uses this clock along with the data-stream to generate a
data clock that can be used as the SCC (serial communication controller) receive clock.
3.3.6 RS422 AND FIBER INTERFACE
The following figure shows the combined RS422 plus fiberoptic interface configuration at 64K baud. The 7L, 7M, 7N, 7P,
and 74 modules are used in two-terminal with a redundant channel or three-terminal configurations where channel 1 is
employed via the RS422 interface (possibly with a multiplexer) and channel 2 via direct fiber.
AWG 20-24 twisted shielded pair is recommended for external RS422 connections and ground the shield only at one end.
3
For the direct fiber channel, address power budget issues properly.
When using a LASER Interface, attenuators can be necessary to ensure that you do not exceed
maximum optical input power to the receiver.
Figure 3–40: RS422 AND FIBER INTERFACE CONNECTION
Connections shown above are for multiplexers configured as DCE (data communications equipment) units.
3.3.7 G.703 AND FIBER INTERFACE
The figure below shows the combined G.703 plus fiberoptic interface configuration at 64 kbps. The 7E, 7F, 7G, 7Q, and 75
modules are used in configurations where channel 1 is employed via the G.703 interface (possibly with a multiplexer) and
channel 2 via direct fiber. AWG 24 twisted shielded pair is recommended for external G.703 connections connecting the
shield to pin 1a at one end only. For the direct fiber channel, address power budget issues properly. See previous sections
for additional details on the G.703 and fiber interfaces.
When using a laser Interface, attenuators can be necessary to ensure that you do not exceed the
maximum optical input power to the receiver.
3-36 B30 Bus Differential System GE Multilin
Page 91

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
Rx2
Tx2
842778A2.CDR
~3b
75, 7E, 7F, 7G,
and 7Q
Rx +
Shield
Tx –
Rx –
Tx +
G.703
communications
~2b
~1b
~1a
~3a
~2a
G.703
channel 1
Surge
Fiber
channel 2
UR-series
device
IEEE C37.94
fiber interface
up to 2 km
842755A2.CDR
Digital
multiplexer,
IEEE C37.94
compliant
Figure 3–41: G.703 AND FIBER INTERFACE CONNECTION
3.3.8 IEEE C37.94 INTERFACE
The UR-series IEEE C37.94 communication modules (modules types 2G, 2H, 76, and 77) are designed to interface with
IEEE C37.94 compliant digital multiplexers or an IEEE C37.94 compliant interface converter for use with direct input and
output applications. The IEEE C37.94 standard defines a point-to-point optical link for synchronous data between a multiplexer and a teleprotection device. This data is typically 64 kbps, but the standard provides for speeds up to 64n kbps,
where n = 1, 2,…, 12. The UR-series C37.94 communication modules are either 64 kbps (with n fixed at 1) for 128 kbps
(with n fixed at 2). The frame is a valid International Telecommunications Union (ITU-T) recommended G.704 pattern from
the standpoint of framing and data rate. The frame is 256 bits and is repeated at a frame rate of 8000 Hz, with a resultant bit
rate of 2048 kbps.
The specifications for the module are as follows:.
• IEEE standard: C37.94 for 1 × 128 kbps optical fiber interface (for 2G and 2H modules) or C37.94 for 2 × 64 kbps opti-
cal fiber interface (for 76 and 77 modules)
• Fiber optic cable type: 50 nm or 62.5 µm core diameter optical fiber
• Fiber optic mode: multi-mode
• Fiber optic cable length: up to 2 km
• Fiber optic connector: type ST
• Wavelength: 820 ±40 nm
• Connection: as per all fiber optic connections, a Tx to Rx connection is required
The UR-series C37.94 communication module can be connected directly to any compliant digital multiplexer that supports
the IEEE C37.94 standard as shown below.
3
GE Multilin B30 Bus Differential System 3-37
Page 92

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
UR-series
device
up to 2 km
IEEE C37.94
converter
RS422
interface
842756A2.CDR
IEEE C37.94
fiber interface
Digital
multiplexer
with EIA-422
interface
842753A2.CDR
Internal timing mode
Loop timing mode
(factory default)
The UR-series C37.94 communication module can be connected to the electrical interface (G.703, RS422, or X.21) of a
non-compliant digital multiplexer via an optical-to-electrical interface converter that supports the IEEE C37.94 standard, as
shown below.
In 2008, GE Digital Energy released revised modules 76 and 77 for C37.94 communication to enable multi-ended fault
location functionality with firmware 5.60 release and higher. All modules 76 and 77 shipped since the change support this
feature and are fully backward compatible with firmware releases below 5.60. For customers using firmware release 5.60
3
and higher, the module can be identified with "Rev D" printed on the module and is to be used on all ends of B30 communication for two and three terminal applications. Failure to use it at all ends results in intermittent communication alarms. For
customers using firmware revisions below 5.60, it is not required to match the revision of the modules installed.
The UR-series C37.94 communication module has six switches that are used to set the clock configuration. The functions
of these control switches are shown below.
For the internal timing mode, the system clock is generated internally. Therefore, the timing switch selection should be
internal timing for relay 1 and loop timed for relay 2. There must be only one timing source configured.
For the looped timing mode, the system clock is derived from the received line signal. Therefore, the timing selection
should be in loop timing mode for connections to higher order systems.
The IEEE C37.94 communications module cover removal procedure is as follows:
1. With power to the relay off, remove the IEEE C37.94 module (type 2G, 2H, 76 or 77 module) as follows. Record the
2. Simultaneously pull the ejector/inserter clips located at the top and at the bottom of each module in order to release the
3. Remove the module cover screw.
4. Remove the top cover by sliding it towards the rear and then lift it upwards.
5. Set the timing selection switches (channel 1, channel 2) to the desired timing modes (see description above).
6. Replace the top cover and the cover screw.
7. Re-insert the IEEE C37.94 module. Take care to ensure that the correct module type is inserted into the correct slot
3-38 B30 Bus Differential System GE Multilin
original location of the module to help ensure that the same or replacement module is inserted into the correct slot.
module for removal.
position. The ejector/inserter clips located at the top and at the bottom of each module must be in the disengaged position as the module is smoothly inserted into the slot. Once the clips have cleared the raised edge of the chassis,
engage the clips simultaneously. When the clips have locked into position, the module is fully inserted.
Page 93

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
Cover screw
Top cover
Bottom cover
Ejector/inserter clip
Ejector/inserter clip
Timing selection
switches
Channel 1
Channel 2
FRONT
REAR
831774A3.CDR
3
Figure 3–42: IEEE C37.94 TIMING SELECTION SWITCH SETTING
GE Multilin B30 Bus Differential System 3-39
Page 94

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
Tx1
Tx2
Rx1
Rx2
Tx1
Tx2
CH1 Link/Activity LED
CH2 Link/Activity LED
COMMS
2B
C37.94SM
1300nm single-mode
ELED
2 channel
Technical support:
Tel: (905)294-6222
Fax: (905)201-2098
(NORTH AMERICA)
1 800 547-8629
Made in Canada
GE Multilin
REV. D
CH1 Clock Configuration LED
CH2 Clock Configuration LED
FRONT VIEW REAR VIEW
842837A1.cdr
Modules shipped since January 2012 have status LEDs that indicate the status of the DIP switches, as shown in the following figure.
3
Figure 3–43: STATUS LEDS
The clock configuration LED status is as follows:
• Flashing green — loop timing mode while receiving a valid data packet
• Flashing yellow — internal mode while receiving a valid data packet
• Solid red — (switch to) internal timing mode while not receiving a valid data packet
The link/activity LED status is as follows:
• Flashing green — FPGA is receiving a valid data packet
• Solid yellow — FPGA is receiving a "yellow bit" and remains yellow for each "yellow bit"
• Solid red — FPGA is not receiving a valid packet or the packet received is invalid
3-40 B30 Bus Differential System GE Multilin
Page 95

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
UR-series
device
C37.94SM
fiber interface
up to 10 km
842757A2.CDR
Digital
multiplexer
C97.94SM
UR-series
device with
C37.94SM
module
C37.94SM
fiber interface
up to 10 km
UR-series
device with
C37.94SM
module
842758A2.CDR
3.3.9 C37.94SM INTERFACE
The UR-series C37.94SM communication modules (2A and 2B) are designed to interface with modified IEEE C37.94 compliant digital multiplexers or IEEE C37.94 compliant interface converters that have been converted from 820 nm multi-mode
fiber optics to 1300 nm ELED single-mode fiber optics. The IEEE C37.94 standard defines a point-to-point optical link for
synchronous data between a multiplexer and a teleprotection device. This data is typically 64 kbps, but the standard provides for speeds up to 64n kbps, where n = 1, 2,…, 12. The UR-series C37.94SM communication module is 64 kbps only
with n fixed at 1. The frame is a valid International Telecommunications Union (ITU-T) recommended G.704 pattern from
the standpoint of framing and data rate. The frame is 256 bits and is repeated at a frame rate of 8000 Hz, with a resultant bit
rate of 2048 kbps.
The specifications for the module are as follows:
• Emulated IEEE standard: emulates C37.94 for 1 × 64 kbps optical fiber interface (modules set to n = 1 or 64 kbps)
• Fiber optic cable type: 9/125 μm core diameter optical fiber
• Fiber optic mode: single-mode, ELED compatible with HP HFBR-1315T transmitter and HP HFBR-2316T receiver
• Fiber optic cable length: up to 11.4 km
• Fiber optic connector: type ST
• Wavelength: 1300 ±40 nm
• Connection: as per all fiber optic connections, a Tx to Rx connection is required
The UR-series C37.94SM communication module can be connected directly to any compliant digital multiplexer that supports C37.94SM as shown below.
3
It can also can be connected directly to any other UR-series relay with a C37.94SM module as shown below.
In 2008, GE Digital Energy released revised modules 2A and 2B for C37.94SM communication to enable multi-ended fault
location functionality with firmware 5.60 release and higher. All modules 2A and 2B shipped since the change support this
feature and are fully backward compatible with firmware releases below 5.60. For customers using firmware release 5.60
and higher, the module can be identified with "Rev D" printed on the module and is to be used on all ends of B30 communication for two and three terminal applications. Failure to use it at all ends results in intermittent communication alarms. For
customers using firmware revisions below 5.60, it is not required to match the revision of the modules installed.
GE Multilin B30 Bus Differential System 3-41
Page 96

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
842753A2.CDR
Internal timing mode
Loop timing mode
(factory default)
The UR-series C37.94SM communication module has six switches that are used to set the clock configuration. The functions of these control switches are shown below.
For the internal timing mode, the system clock is generated internally. Therefore, the timing switch selection should be
internal timing for relay 1 and loop timed for relay 2. There must be only one timing source configured.
3
For the looped timing mode, the system clock is derived from the received line signal. Therefore, the timing selection
should be in loop timing mode for connections to higher order systems.
The C37.94SM communications module cover removal procedure is as follows:
1. With power to the relay off, remove the C37.94SM module (modules 2A or 2B) as follows. Record the original location
of the module to help ensure that the same or replacement module is inserted into the correct slot.
2. Simultaneously pull the ejector/inserter clips located at the top and at the bottom of each module in order to release the
module for removal.
3. Remove the module cover screw.
4. Remove the top cover by sliding it towards the rear and then lift it upwards.
5. Set the timing selection switches (channel 1, channel 2) to the desired timing modes (see description above).
6. Replace the top cover and the cover screw.
7. Re-insert the C37.94SM module. Take care to ensure that the correct module type is inserted into the correct slot
position. The ejector/inserter clips located at the top and at the bottom of each module must be in the disengaged position as the module is smoothly inserted into the slot. Once the clips have cleared the raised edge of the chassis,
engage the clips simultaneously. When the clips have locked into position, the module is fully inserted.
3-42 B30 Bus Differential System GE Multilin
Page 97

3 HARDWARE 3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS
Cover screw
Top cover
Bottom cover
Ejector/inserter clip
Ejector/inserter clip
Timing selection
switches
Channel 1
Channel 2
FRONT
REAR
831774A3.CDR
Tx1
Tx2
Rx1
Rx2
Tx1
Tx2
CH1 Link/Activity LED
CH2 Link/Activity LED
COMMS
2B
C37.94SM
1300nm single-mode
ELED
2 channel
Technical support:
Tel: (905)294-6222
Fax: (905)201-2098
(NORTH AMERICA)
1 800 547-8629
Made in Canada
GE Multilin
REV. D
CH1 Clock Configuration LED
CH2 Clock Configuration LED
FRONT VIEW REAR VIEW
842837A1.cdr
3
Figure 3–44: C37.94SM TIMING SELECTION SWITCH SETTING
Modules shipped since January 2012 have status LEDs that indicate the status of the DIP switches, as shown in the following figure.
The clock configuration LED status is as follows:
Figure 3–45: STATUS LEDS
• Flashing green — loop timing mode while receiving a valid data packet
GE Multilin B30 Bus Differential System 3-43
Page 98

3.3 DIRECT INPUT AND OUTPUT COMMUNICATIONS 3 HARDWARE
• Flashing yellow — internal mode while receiving a valid data packet
• Solid red — (switch to) internal timing mode while not receiving a valid data packet
The link/activity LED status is as follows:
• Flashing green — FPGA is receiving a valid data packet
• Solid yellow — FPGA is receiving a "yellow bit" and remains yellow for each "yellow bit"
• Solid red — FPGA is not receiving a valid packet or the packet received is invalid
3
3-44 B30 Bus Differential System GE Multilin
Page 99

4 HUMAN INTERFACES 4.1 ENERVISTA UR SETUP SOFTWARE INTERFACE
4 HUMAN INTERFACES 4.1ENERVISTA UR SETUP SOFTWARE INTERFACE 4.1.1 INTRODUCTION
The EnerVista UR Setup software provides a graphical user interface (GUI) as one of two human interfaces to a UR device.
The alternate human interface is implemented via the device’s faceplate keypad and display (see the Faceplate interface
section in this chapter).
The EnerVista UR Setup software provides a single facility to configure, monitor, maintain, and troubleshoot the operation
of relay functions, connected over local or wide area communication networks. It can be used while disconnected (offline)
or connected (online) to a UR device. In offline mode, settings files can be created for eventual downloading to the device.
In online mode, you can communicate with the device in real-time.
The EnerVista UR Setup software is provided with every B30 relay and runs on Microsoft
This chapter provides a summary of the basic EnerVista UR Setup software interface features. The EnerVista UR Setup
Help File provides details for getting started and using the EnerVista UR Setup software interface.
To start using the EnerVista UR Setup software, site and device definition are required. See the EnerVista UR Setup Help
File or refer to the Connecting EnerVista UR Setup with the B30 section in Chapter 1 for details.
Windows XP, 7, and Server 2008.
4.1.2 CREATING A SITE LIST
4.1.3 ENERVISTA UR SETUP OVERVIEW
a) ENGAGING A DEVICE
The EnerVista UR Setup software can be used in online mode (relay connected) to directly communicate with the B30
relay. Communicating relays are organized and grouped by communication interfaces and into sites. Sites can contain any
number of relays selected from the UR-series of relays.
b) USING SETTINGS FILES
The EnerVista UR Setup software interface supports three ways of handling changes to relay settings:
• In offline mode (relay disconnected) to create or edit relay settings files for later download to communicating relays
• While connected to a communicating relay to directly modify any relay settings via relay data view windows, and then
save the settings to the relay
• You can create/edit settings files and then write them to the relay while the interface is connected to the relay
Settings files are organized on the basis of file names assigned by the user. A settings file contains data pertaining to the
following types of relay settings:
• Device definition
• Product setup
• System setup
• FlexLogic
• Grouped elements
• Control elements
• Inputs/outputs
• Testing
Factory default values are supplied and can be restored after any changes.
The following communications settings are not transferred to the B30 with settings files.
Modbus Slave Address
Modbus TCP Port Number
RS485 COM2 Baud Rate
RS485 COM2 Parity
COM2 Minimum Response Time
4
GE Multilin B30 Bus Differential System 4-1
Page 100

4.1 ENERVISTA UR SETUP SOFTWARE INTERFACE 4 HUMAN INTERFACES
COM2 Selection
RRTD Slave Address
RRTD Baud Rate
IP Address
IP Subnet Mask
IEC61850 Config GOOSE ConfRev
IP Routing
When a settings file is loaded to a B30 that is in-service, the following sequence occurs:
1. The B30 takes itself out of service.
2. The B30 issues a
3. The B30 closes the critical fail contact.
c) CREATING AND EDITING FLEXLOGIC
You create or edit a FlexLogic equation in order to customize the relay. You can subsequently view the automatically generated logic diagram.
d) VIEWING ACTUAL VALUES
4
You can view real-time relay data such as input/output status and measured parameters.
e) VIEWING TRIGGERED EVENTS
While the interface is in either online or offline mode, you can view and analyze data generated by triggered specified
parameters, via one of the following:
• Event recorder
The event recorder captures contextual data associated with the last 1024 events, listed in chronological order from
most recent to oldest.
• Oscillography
The oscillography waveform traces and digital states are used to provide a visual display of power system and relay
operation data captured during specific triggered events.
UNIT NOT PROGRAMMED major self-test error.
f) FILE SUPPORT
• Execution: Any EnerVista UR Setup file that is opened launches the application or provides focus to the already
opened application. If the file was a settings file (has a URS extension) that had been removed from the Settings List
tree menu, it is added back to the Settings List tree menu.
• Drag and Drop: The Site List and Settings List control bar windows are each mutually a drag source and a drop target
for device-order-code-compatible files or individual menu items. Also, the Settings List control bar window and any
Windows Explorer directory folder are each mutually a file drag source and drop target.
New files that are dropped into the Settings List window are added to the tree, which is automatically sorted alphabetically with respect to settings file names. Files or individual menu items that are dropped in the selected device menu in
the Site List window are automatically sent to the online communicating device.
g) FIRMWARE UPGRADES
The firmware of a B30 device can be upgraded, locally or remotely, via the EnerVista UR Setup software. The corresponding instructions are provided by the EnerVista UR Setup Help file under the topic “Upgrading Firmware”.
If you are upgrading from version 7.0 or 7.1 to 7.2 or later, some CPU modules require a new boot version. Update this first
in EnerVista under Maintenance > Update Firmware.
Before backing up settings and upgrading, set the Settings > Product Setup > Security > Dual Permission Security
Access > Remote Setting Authorized and Local Setting Authorized settings to "ON." Otherwise, the upgrade is blocked
and results in an "Unable to put relay in flash mode" message.
4-2 B30 Bus Differential System GE Multilin
 Loading...
Loading...