


GAUI
Elektro-Helikopter
Electro Helicopter
Hélicoptère électrique
Elektro-Helikopter
„X5 Lite“
Bausatz / Construction set / Kit / Bouwpakket
Best.-Nr. / Item No. / N° de commande / Bestelnr.: 20 98 38
Basic-Bausatz / Basic Construction set / Kit Basic / Basic-bouwpakket
Best.-Nr. / Item No. / N° de commande / Bestelnr.: 20 98 83
Super-Combo-Bausatz / Super-Combo Construction set /
Kit Super-Combo / Super-combo-bouwpakket
Best.-Nr. / Item No. / N° de commande / Bestelnr.: 20 98 89
Bedienungsanleitung Seite 2 - 29
Operating Instructions Page 30 - 57
Notice d’emploi Page 58 - 85
Gebruiksaanwijzing Pagina 86 - 113
Version 09/11
Inhaltsverzeichnis
Seite
1. Einführung ...................................................................................................................................................... 2
2. Bestimmungsgemäße Verwendung ................................................................................................................... 3
3. Produktbeschreibung ....................................................................................................................................... 3
4. Lieferumfang ................................................................................................................................................... 3
5. Sicherheitshinweise.......................................................................................................................................... 4
a) Allgemein ................................................................................................................................................... 4
b) Vor der Inbetriebnahme .............................................................................................................................. 4
c) Während des Betriebs ................................................................................................................................. 5
6. Batterie- und Akku-Hinweise............................................................................................................................. 6
7. Allgemeine Hinweise zum Aufbau der Mechanik ................................................................................................. 7
8. Aufbau der Mechanik ....................................................................................................................................... 9
9. Wartung und Pflege ....................................................................................................................................... 16
10. Entsorgung ................................................................................................................................................... 16
a) Allgemein ................................................................................................................................................. 16
b) Batterien und Akkus .................................................................................................................................. 16
11. Technische Daten .......................................................................................................................................... 17
12. Heading Lock Gyro „GU 211“ .......................................................................................................................... 18
13. Drehzahlregler „GUEC GE-610“ ....................................................................................................................... 25
1. Einführung
Sehr geehrte Kundin, sehr geehrter Kunde,
wir bedanken uns für den Kauf dieses Produkts.
Dieses Produkt erfüllt die gesetzlichen, nationalen und europäischen Anforderungen.
Um diesen Zustand zu erhalten und einen gefahrlosen Betrieb sicherzustellen, müssen Sie als Anwender diese Bedienungs-
anleitung beachten!
Diese Bedienungsanleitung gehört zu diesem Produkt. Sie enthält wichtige Hinweise zur Inbetriebnahme und
Handhabung. Achten Sie hierauf, auch wenn Sie dieses Produkt an Dritte weitergeben.
Heben Sie deshalb diese Bedienungsanleitung zum Nachlesen auf!
Alle enthaltenen Firmennamen und Produktbezeichnungen sind Warenzeichen der jeweiligen Inhaber. Alle Rechte vorbehalten.
Bei technischen Fragen wenden Sie sich bitte an:
Deutschland: Tel.: 0180/5 31 21 11
Fax: 0180/5 31 21 10
E-Mail: Bitte verwenden Sie unser Formular im Internet: www.conrad.de, unter der Rubrik „Kontakt“.
Mo. bis Fr. 8.00-18.00 Uhr
Österreich: www.conrad.at
www.business.conrad.at
Schweiz: Tel.: 0848/80 12 88
Fax: 0848/80 12 89
E-Mail: support@conrad.ch
Mo. bis Fr. 8.00-12.00, 13.00-17.00 Uhr
2
2. Bestimmungsgemäße Verwendung
Bei diesem Produkt handelt es sich um einen elektrisch angetriebenen Modellhubschrauber, der für den privaten Einsatz im
Modellbaubereich und für die damit verbundenen Betriebszeiten ausgelegt ist. Für die Steuerung des Modells muss eine für
Modellhubschrauber geeignete Fernsteueranlage (nicht mit im Lieferumfang) verwendet werden.
Eine andere Verwendung als zuvor beschrieben, kann zur Beschädigung des Produktes mit den damit verbundenen Gefahren wie z.B. Kurzschluss, Brand, elektrischer Schlag etc. führen. Die Sicherheitshinweise sind unbedingt zu befolgen!
Das Produkt darf nicht feucht oder nass werden.
Das Produkt ist nicht für Kinder unter 14 Jahren geeignet.
Beachten Sie alle Sicherheitshinweise dieser Bedienungsanleitung. Diese enthalten wichtige Informationen zum
Umgang mit dem Produkt.
Sie allein sind für den gefahrlosen Betrieb des Modells verantwortlich!
3. Produktbeschreibung
Der Modellhubschrauber wird als Bausatz in Einzelteilen geliefert und beinhaltet alle Komponenten, die zum Aufbau der
Mechanik erforderlich sind. Je nach Ausführung können der Modellhubschraubermechanik noch weitere Komponenten wie
Antriebsmotor, Regler, Servos und Kreisel beiliegen.
Die Montage der Mechanik sowie der Einbau der erforderlichen Antriebs- und Fernsteuerkomponenten sind vom Anwender
selbst durchzuführen. Aus diesem Grund setzt dieses Modell für die Fertigstellung und den anschließenden Betrieb umfangreiche und fundierte Kenntnisse im Umgang mit Modellhubschraubern voraus.
Für Kinder und Modellbaueinsteiger ist dieser Modellhubschrauber nicht geeignet!
4. Lieferumfang
• Hubschraubermechanik
• Hersteller-Handbuch mit Montageskizzen
• Montageanleitung
3
5. Sicherheitshinweise
Bei Schäden, die durch Nichtbeachtung dieser Bedienungsanleitung verursacht werden, erlischt
die Gewährleistung/Garantie. Für Folgeschäden übernehmen wir keine Haftung!
Bei Sach- oder Personenschäden, die durch unsachgemäße Handhabung oder Nichtbeachten der
Sicherheitshinweise verursacht werden, übernehmen wir keine Haftung! In solchen Fällen erlischt
die Gewährleistung/Garantie.
Von der Garantie und Gewährleistung ausgeschlossen sind ferner normaler Verschleiß bei Betrieb (z.B. abgenutzte Zahnräder oder Servogetriebe) und Unfallschäden (z.B. gebrochene Kufenbügel oder Rotorblätter).
Sehr geehrte Kundin, sehr geehrter Kunde, diese Sicherheitshinweise dienen nicht nur zum Schutz des Produkts,
sondern auch zu Ihrer eigenen Sicherheit und der anderer Personen. Lesen Sie sich deshalb dieses Kapitel sehr
aufmerksam durch, bevor Sie das Produkt in Betrieb nehmen!
a) Allgemein
Achtung, wichtiger Hinweis!
Beim Betrieb des Modells kann es zu Sach- und/oder Personenschäden kommen. Achten Sie deshalb unbedingt
darauf, dass Sie für den Betrieb des Modells ausreichend versichert sind, z.B. über eine Haftpflichtversicherung.
Falls Sie bereits eine Haftpflichtversicherung besitzen, so informieren Sie sich vor Inbetriebnahme des Modells bei
Ihrer Versicherung, ob der Betrieb des Modells mitversichert ist.
Beachten Sie: In verschiedenen Ländern der EU besteht eine Versicherungspflicht für alle Flugmodelle!
• Aus Sicherheits- und Zulassungsgründen (CE) ist das eigenmächtige Umbauen und/oder Verändern des Produkts nicht
gestattet.
• Das Produkt ist kein Spielzeug, es ist nicht für Kinder unter 14 Jahren geeignet.
• Das Produkt darf nicht feucht oder nass werden.
• Sollten Sie noch nicht über ausreichende Kenntnisse über den Umgang mit ferngesteuerten Modellen verfügen, so wen-
den Sie sich bitte an einen erfahrenen Modellsportler oder an einen Modellbau-Club.
• Lassen Sie das Verpackungsmaterial nicht achtlos liegen, dieses könnte für Kinder zu einem gefährlichen Spielzeug
werden.
b) Vor der Inbetriebnahme
• Halten Sie sich bei der Inbetriebnahme der Fernsteueranlage strickt an die vom Hersteller vorgegebene Reihenfolge. Im
Regelfall muss immer zuerst der Sender und anschließend unmittelbar danach den Flugakku des Hubschraubers an den
Drehzahlsteller angeschlossen werden.
Falls Sie das Modell nicht mit einer 2,4 GHz Fernsteueranlage betreiben, achten Sie darauf, dass kein weiterer Sender
zeitgleich auf dem gleichen Fernsteuerkanal betrieben wird.
• Überprüfen Sie die Funktionssicherheit Ihres Modells und der Fernsteueranlage. Achten Sie dabei auf sichtbare Beschädi-
gungen, wie z.B. defekte Steckverbindungen oder beschädigte Kabel. Sämtliche beweglichen Teile am Modell müssen
leichtgängig funktionieren, dürfen jedoch kein Spiel in der Lagerung aufweisen.
• Der zum Betrieb erforderliche Flugakku sowie eventuell im Fernsteuersender eingesetzte Akkus sind entsprechend den
Herstellerangaben aufzuladen.
• Vor jeder Inbetriebnahme müssen die Einstellungen der Trimmung am Sender für die verschiedenen Steuerrichtungen
kontrolliert und ggf. eingestellt werden.
• Wählen Sie ein geeignetes Gelände zum Betrieb Ihres Modellhubschraubers aus.
• Führen Sie vor jeder Inbetriebnahme gemäß den Herstellerangaben einen Reichweitentest der Fernsteueranlage durch.
4

c) Während des Betriebs
• Gehen Sie bei Betrieb des Produkts kein Risiko ein! Ihre eigene Sicherheit und die Ihres Umfeldes hängen alleine von
Ihrem verantwortungsbewussten Umgang mit dem Modell ab.
• Der unsachgemäße Betrieb kann schwerwiegende Personen- und Sachschäden verursachen! Achten Sie deshalb beim
Flugbetrieb auf einen ausreichenden Sicherheitsabstand zur Personen, Tieren und Gegenständen.
• Fliegen Sie nie direkt auf Zuschauer oder auf sich selbst zu.
• Fliegen Sie mit Ihrem Modell nur dann, wenn Ihre Reaktionsfähigkeit uneingeschränkt gegeben ist. Müdigkeit, Alkoholoder Medikamenten-Einfluss können zu Fehlreaktionen führen.
• Sowohl der Motor, der Drehzahlsteller und der Flugakku können sich beim Betrieb erhitzen. Machen Sie aus diesem Grund
eine Pause von 5 - 10 Minuten, bevor Sie den Flugakku wieder laden, bzw. mit einem eventuell vorhandenen Ersatzflugakku weiterfliegen.
• Lassen Sie die Fernsteuerung (Sender) immer eingeschaltet, solange das Modell in Betrieb ist. Schließen Sie nach der
Landung immer zuerst den Flugakku vom Drehzahlsteller ab. Erst danach darf die Fernsteuerung ausgeschaltet werden.
• Schalten Sie während des Betriebs niemals den Sender aus ohne vorher den Flugakku vom Drehzahlsteller zu trennen.
• Bei einem Defekt oder einer Fehlfunktion ist zuerst die Ursache der Störung zu beseitigen, bevor Sie Ihr Modell wieder
starten.
• Setzen Sie Ihr Modell und die Fernsteueranlage nicht über längere Zeit der direkten Sonneneinstrahlung oder großer Hitze
aus.
5
6. Batterie- und Akku-Hinweise
Obwohl der Umgang mit Batterien und Akkus im täglichen Leben heute eine Selbstverständlichkeit ist, bestehen zahlreiche
Gefahren und Probleme. Speziell bei LiPo-/LiIon-Akkus mit ihrem hohen Energieinhalt (im Vergleich zu herkömmlichen NiCdoder NiMH-Akkus) sind diverse Vorschriften unbedingt einzuhalten, da andernfalls Explosions- und Brandgefahr besteht.
Beachten Sie deshalb unbedingt die nachfolgend genannten Informationen und Sicherheitshinweise zum Umgang mit
Batterien und Akkus.
• Batterien/Akkus gehören nicht in Kinderhände.
• Lassen Sie Batterien/Akkus nicht offen herumliegen, es besteht die Gefahr, dass diese von Kindern oder Haustieren
verschluckt werden. Suchen Sie in einem solchen Fall sofort einen Arzt auf!
• Batterien/Akkus dürfen niemals kurzgeschlossen, zerlegt oder ins Feuer geworfen werden. Es besteht Explosionsgefahr!
• Ausgelaufene oder beschädigte Batterien/Akkus können bei Berührung mit der Haut Verätzungen verursachen, benutzen
Sie deshalb in diesem Fall geeignete Schutzhandschuhe.
• Herkömmliche Batterien dürfen nicht aufgeladen werden. Es besteht Brand- und Explosionsgefahr! Laden Sie ausschließlich dafür vorgesehene Akkus; verwenden Sie dazu geeignete Akkuladegeräte. Batterien (1,5V) sind nur für den einmaligen Gebrauch vorgesehen und müssen ordnungsgemäß entsorgt werden, wenn sie leer sind.
• Achten Sie beim Einlegen von Batterien/Akkus bzw. beim Anschluss eines Akkupacks oder eines Ladegerätes auf die
richtige Polung (Plus/+ und Minus/- beachten). Bei Falschpolung werden nicht nur der Sender, das Flugmodell und die
Akkus beschädigt. Es besteht zudem Brand- und Explosionsgefahr.
• Wechseln Sie immer den ganzen Satz Batterien bzw. Akkus aus. Mischen Sie nicht volle mit halbvollen Batterien/Akkus.
Verwenden Sie immer Batterien bzw. Akkus des gleichen Typs und Herstellers.
• Mischen Sie niemals Batterien mit Akkus! Verwenden Sie entweder Batterien oder Akkus.
• Bei längerem Nichtgebrauch (z.B. bei Lagerung) entnehmen Sie die in der Fernsteuerung eingelegten Batterien (bzw.
Akkus), um Schäden durch auslaufende Batterien/Akkus zu vermeiden.
Achtung!
Nach dem Flug ist der Flugakku vom Helikopter zu trennen. Lassen Sie den Flugakku nicht am Helikopter angesteckt, wenn Sie ihn nicht benutzen (z.B. bei Transport oder Lagerung). Andernfalls kann der Flugakku tiefentladen werden, dadurch wird er zerstört/unbrauchbar!
• Laden Sie Akkus etwa alle 3 Monate nach, da es andernfalls durch die Selbstentladung zu einer sog. Tiefentladung
kommen kann, wodurch die Akkus unbrauchbar werden.
• Laden Sie den Flugakku niemals unmittelbar nach dem Gebrauch. Lassen Sie den Flugakku immer erst abkühlen (mind. 510 Minuten).
Laden Sie nur intakte und unbeschädigte Akkus. Sollte die äußere Isolierung des Akkus beschädigt sein bzw. der Akku
verformt bzw. aufgebläht sein, darf er auf keinen Fall aufgeladen werden. In diesem Fall besteht akute Brand und
Explosionsgefahr!
• Beschädigen Sie niemals die Außenhülle des Flugakkus, zerschneiden Sie die Folienumhüllung nicht, stechen Sie nicht mit
scharfen Gegenständen in den Flugakku. Es besteht Brand- und Explosionsgefahr!
• Entnehmen Sie den Flugakku zum Laden aus dem Modell und legen Sie ihn auf einen feuerfesten Untergrund. Halten Sie
Abstand zu brennbaren Gegenständen.
• Laden Sie Akkus immer mit der vom Hersteller angegebenen Stromstärke und achten Sie dabei darauf, dass die zulässigen
Maximalwerte nicht überschritten werden.
• Da sich sowohl das Ladegerät als auch der Flugakku während des Ladevorgangs erwärmen, ist es erforderlich, auf eine
ausreichende Belüftung zu achten. Decken Sie das Ladegerät und den Flugakku niemals ab! Dies gilt selbstverständlich
auch für andere Ladegeräte und andere Akkus.
• Laden Sie Akkus niemals unbeaufsichtigt.
• Trennen Sie den Flugakku vom Ladegerät, wenn dieser vollständig aufgeladen ist.
• Ladegeräte und Akkus dürfen nicht feucht oder nass werden. Es besteht Lebensgefahr durch einen elektrischen Schlag,
außerdem besteht Brand- und Explosionsgefahr durch den Akku!
6

7. Allgemeine Hinweise zum Aufbau der Mechanik
Bevor Sie mit dem Aufbau der Mechanik beginnen, sollten Sie sich über einige wichtige Hinweise informieren:
• Jeder Modellhubschrauber ist nur so gut, wie er montiert wurde. Aus diesem Grund sollten Sie die Montage gewissenhaft
und genau nach Anleitung durchführen. Fehlerhaft oder gar falsch montierte Modellhubschrauber können nicht nur
deutlich schlechter fliegen, sie stellen auch ein erhebliches Sicherheitsrisiko dar.
• Halten Sie sich beim Zusammenbau genau an die Montageskizzen im Hersteller-Handbuch. Beachten Sie dabei auch, dass
bestimmte Bauteile mit speziellem Schraubensicherungslack (nicht im Lieferumfang) fixiert werden müssen. Dazu werden
in den verschiedenen Montageskizzen folgende Symbole verwendet (siehe auch Hersteller-Handbuch Seite 6).
Verschraubung mit Sicherungslack L
L
Sicherheitsverschraubung* mit Sicherungslack L
L
Verschraubung mit Sicherungslack T
T
Sicherheitsverschraubung* mit Sicherungslack T
T
Aufbringen von Sicherungslack T
T
Aufbringen von Sekundenkleber
CA
Aufbringen von Schmiermittel
Achten Sie auf die korrekte Ausführung des Montageabschnittes
!
Achten Sie ganz besonders auf die korrekte Ausführung des Montageabschnittes
!
Die korrekte Einhaltung der Hinweise in den Montageskizzen ist für die Funktion und die Betriebssicherheit des
Modells von maximaler Bedeutung.
!
* Da von diesen Verschraubungen die Betriebssicherheit des Modells abhängig ist, achten Sie besonders auf eine feste
Verbindung/Verschraubung der Bauteile, ohne dabei das Schraubenmaterial oder das Bauteil zu überlasten.
Als Sicherungslack „L“ eignet sich zum Beispiel „Loctite 221“ mit niedriger Festigkeit und als Sicherungslack „T“ eignet sich
„Loctite 243“ mit mittlerer Festigkeit.
In der Praxis hat es sich aber durchaus bewährt, für alle zu sichernden Verschraubungen mittelfesten Sicherungslack zu
verwenden. Um im Servicefall die gesicherten Schraubverbindungen wieder lösen zu können, raten wir von der Verwendung
von hochfestem Sicherungslack ab.
7

• Öffnen Sie die jeweiligen Verpackungsbeutel erst dann, wenn die Bauteile auch wirklich für den jeweiligen Bauabschnitt
benötigt werden. Legen Sie dazu die einzelnen Komponenten in einen separaten Bauteilebehälter (leere Gefrierdose o.ä.).
• Führen Sie die einzelnen Montageschritte erst durch, wenn Sie alle anstehenden Tätigkeiten verstanden haben und genau
wissen, welches Bauteil wo zu befestigen ist.
• Die beiliegenden Schrauben haben unterschiedliche Längen und unterschiedliche Köpfe. Achten Sie darauf, dass Sie
jeweils die richtigen Schrauben montieren. Im Zweifelsfall können Sie die Schrauben jeweils oben links bei den Bildern auf
die Skizzen im Maßstab 1:1 legen und so die richtige Schraubenauswahl kontrollieren.
• Verwenden Sie nur das dem Bausatz beiliegende Material und versuchen Sie nicht das Modell durch zusätzliches und
ungeeignetes Montagematerial zu verändern. Bei einem Defekt tauschen Sie betroffene Teile und Komponenten nur durch
Originalteile aus der Ersatzteilliste aus.
• Verwenden Sie hochwertiges Montagewerkzeug wie z.B. Innensechskantschlüssel mit exakt geschliffenen und gehärteten
Schraubenantrieben. Billiges Werkzeug neigt zum Überdrehen und dadurch werden die Schraubenköpfe beschädigt.
• Montieren Sie den Modellhubschrauber auf einer geeigneten Unterlage (weiches Baumwolltuch o. ä.), um die Mechanik
vor Kratzern und Beschädigungen zu schützen.
8
8. Aufbau der Mechanik
Nehmen Sie das Hersteller-Handbuch mit den Montageskizzen zur Hand und beginnen Sie den Aufbau des Modellhubschraubers
gemäß den Zeichnungen ab Seite 7.
Seite 7
Obere Abbildung:
Montieren Sie zunächst den Halter für das Heckrohr (# B) und verschrauben Sie anschließend die beiden Chassisplatten
entsprechend der Zeichnung. Bitte beachten Sie, dass die beiden Chassisplatten unterschiedlich sind und die Schrauben
verschiedene Längen aufweisen. Verwenden Sie für jede Verschraubung Sicherungslack.
Die beiden M3x18 Schrauben werden erst nach dem Einbau des Heckrohres (siehe Seite 13, untere Abbildung) fest angezogen.
Untere Abbildung:
Montieren Sie das Landegestell entsprechend der Abbildung. Die Kufenbügel müssen dabei in Flugrichtung nach vorne
ausgerichtet sein (siehe auch Seite 9). Verwenden Sie dazu drei Chassisplatten-Verbinder, die in der senkrechten Bohrung
für die Schrauben M3x16 und die Schraube M3x10 lediglich eine Bohrung und kein Gewinde aufweisen.
Die beiden Schrauben M3x16 und die Schraube M3x10 werden erst nach dem Aufsetzen, Ausrichten und Verschrauben des
Chassis mit dem Landegestell (siehe nächste Abbildung) fest angezogen.
Seite 8
Obere Abbildung:
Setzen Sie das Chassis auf das Landegestell und verschrauben Sie die Einheit. Verwenden Sie für jede Verschraubung
Sicherungslack. Die Chassisplatten-Verbinder im vorderen und hinteren Bereich müssen in der Mitte ein Gewinde für die
M3x6 Senkkopf-Schrauben aufweisen. Die vordere und hintere Chassisplatte muss dabei so gedreht werden, dass die
Senkkopfschrauben plan mit der Oberfläche abschließen.
Untere Abbildung:
Setzen Sie das Hauptgetriebe zusammen mit der Distanzscheibe 8x13x2 in die Mechanik ein und schieben Sie die Rotorwelle von oben in die Mechanik. Die Bohrung mit dem geringeren Abstand zum Wellenende muss dabei nach unten zum
Hauptgetriebe zeigen.
Nachdem Sie mit der Schraube M3x16 die Rotorwelle mit dem Hauptgetriebe verbunden haben, schieben Sie den Stellring
von oben auf die Rotorwelle. Sichern Sie den Stellring mit zwei Madenschrauben M3x3. Die Rotorwelle darf kein vertikales
Spiel in der Mechanik aufweisen.
Seite 9
Obere Abbildung:
Montieren Sie mit Hilfe der Schrauben M2,6x10 die drei Taumelscheiben-Servos und das Heck-Servo entsprechend der
Abbildungen 1 bis 3 an die dafür vorgesehenen Stellen.
Wichtig!
Falls Ihr Hubschraubermodell bereits mit Servos geliefert wurde, achten Sie auf die genauen Typenbezeichnungen
der Servos. Für die Taumelscheibe müssen drei gleiche Servos (z.B. GS 501) verwendet werden, wogegen für die
Heckansteuerung ein schnelleres Servo (z.B. GS 502) benötigt wird. Für eine saubere Kabelverlegung besitzt das
Chassis Schlitze, durch die Kabelbinder gezogen werden können.
Untere Abbildung:
Der Heck-Kreisel kann oberhalb der Heckrohrbefestigung montiert werden. Im hinteren Bereich der Chassis-Bodenplatte
kann der Empfänger und im vorderen Bereich der Drehzahlsteller montiert werden.
9
Seite 10
Obere Abbildung:
Setzen Sie den Motorträger auf den Motor auf und drehen die vier Schrauben (2 x M3x6 und 2x M3x10) aber nur so fest,
dass der Motor auf dem Träger noch verschoben werden kann. Montieren Sie anschließend das Motorritzel auf der Motorwelle und fixieren Sie das Ritzel mit zwei Madenschrauben M3x3. Die Position des Ritzels auf der Motorwelle muss so
gewählt werden, dass es später weder oben noch unten über das Hauptzahnrad herausragt.
Untere Abbildung:
Setzen Sie den Motor entsprechend der Skizze in das Chassis ein und schrauben Sie den Motorträger mit sechs Schrauben
M3x6 am Chassis fest. An den beiden Seiten werden jeweils zwei Zylinderkopf-Schrauben und an der Oberseite zwei
Senkkopf-Schrauben verwendet.
Zum Einstellen des Zahnflankenspiels schieben Sie einen schmalen Papierstreifen zwischen Motorritzel und Getriebezahnrad,
drücken den Motor in Richtung Getriebe und schrauben den Motor von unten am Motorträger fest. Anschließend wird der
Papierstreifen wieder entfernt.
Bei korrekter Einstellung greifen die beiden Zahnräder sicher ineinander ohne dabei zu klemmen oder zu viel Spiel aufzuweisen.
Tipp aus der Praxis:
Da im eingebauten Zustand nicht alle vier Motorbefestigungs-Schrauben erreicht werden können, hat es sich
bewährt, den Motorträger samt Motor zunächst nur in der Mechanik zu fixieren.
Nach dem Einstellen des Zahnflankenspiels ist es ausreichend, den Motor nur mit den von unten erreichbaren
Schrauben zu fixieren. Anschließend wird der Motorträger samt Motor wieder ausgebaut und alle vier Motorschrauben fest angezogen. Zum Schluss kann der Motorträger wieder in die Mechanik eingesetzt und fest verschraubt werden.
Die Anschlussleitungen des Motors werden an der Außenseite des Chassis nach unten zum Drehzahlsteller geführt und dort
angeschlossen.
Seite 11
Obere Abbildung:
Schieben Sie zunächst die Taumelscheibe und das Zentralstück mit den beiden Pitchkompensator-Hebeln entsprechend der
Abbildung auf die Rotorwelle. Verbinden Sie die Pitchkompensator-Hebel mit der Taumelscheibe und setzen anschließend
den Rotorkopf auf. Das Paddelstangen-Zentralstück ist bereits werkseitig vormontiert. Die Anlenkkugeln „A“ müssen in den
äußeren Gewindebohrungen befestigt werden.
Der Rotorkopf wurde ab Werk mit weichen Dämpfergummis (schwarz) aufgebaut. Für eine härtere Rotorkopfabstimmung liegen dem Rotorkopf noch rote Dämpfergummis bei.
Untere Abbildung:
Fertigen Sie die beiden Paddelwippen-Anlenkgestänge entsprechend der Zeichnung links unten im Bild an. Nach der Montage der Paddelwippe (siehe auch Seite 12 obere Abbildung) richten Sie die Paddelstange so aus, dass sie auf beiden Seiten
der Wippe gleich weit herausragt (siehe Skizze unten im Bild)
Seite 12
Obere Abbildung:
Drehen Sie die Paddel auf die Paddelstange auf und richten Sie die Paddel exakt aus. Die Paddel müssen jeweils einen
Abstand von 135 mm zur Wippe aufweisen (siehe Skizze unterhalb der Zeichnung) und waagerecht zur Paddelwippe
ausgerichtet sein (siehe Skizze links oben).
Untere Abbildung:
Schieben Sie den Antriebsriemen für den Heckrotor in das Heckrohr und bauen Sie das Heckrotorgehäuse mit der Heckrotorwelle entsprechend der Abbildung zusammen.
Wichtig!
Beachten Sie dabei unbedingt die unterschiedlichen Schraubenlängen.
10
Seite 13
Obere Abbildung:
Der vormontierte Heckrotor wird zusammen mit der Schiebehülse entsprechend der Skizze auf die Heckrotorwelle aufgeschoben und mit zwei Madenschrauben M3x3 befestigt.
Achten Sie dabei darauf, dass die beiden Madenschrauben in die jeweils äußeren Vertiefungen der Heckrotorwelle greifen.
Überprüfen Sie nach der Fertigstellung der Heckrotoreinheit die Funktion der Heckrotor-Anlenkung. Alle Komponenten
müssen leichtgängig arbeiten, dürfen aber kein Spiel in der Lagerung aufweisen.
Wichtig!
Ziehen Sie die Schrauben der Heckrotorblätter nur so fest an, dass sich die Rotorblätter im Flug noch sauber um
180° zueinander ausrichten können.
Untere Abbildung:
Schieben Sie das Heckrohr vorsichtig von hinten in die Mechanik. Achten Sie dabei darauf, dass der Antriebsriemen entsprechend der oberen Skizze gedreht wird.
Nachdem der Riemen auf das vordere Antriebsrad aufgelegt wurde, ziehen Sie das Heckrohr wieder zurück. Achten Sie
dabei auf die korrekte Riemenspannung. Spannen Sie dazu den Riemen nur so stark, dass der ganze Heckrotorantrieb noch
leichtgängig funktioniert.
Wenn das Heckrohr optimal passt und das Seitenleitwerk senkrecht ausgerichtet ist, ziehen Sie die beiden Chassis-Schrauben M3x18 (siehe Seite 7 obere Abbildung) sowie die Schrauben an den beiden Heckrohrstützen fest an. Verbinden Sie das
Heckrotorgestänge mit dem Heckrotor-Servo (siehe auch Seite 17 untere Abbildung).
Seite 14
Obere Abbildung:
Montieren Sie die Rotorkopf- und Taumelscheiben-Anlenkgestänge entsprechend den jeweiligen Skizzen und setzen Sie die
Gestänge ein.
Wichtiger Hinweis!
Da Hochleistungs-Elektroantriebe sehr gefährlich sein können, empfehlen wir Ihnen für Wartungs- und Einstellungsarbeiten immer den Motor vom Regler zu trennen. So kann ein unbeabsichtigtes Anlaufen der Mechanik zuverlässig vermieden werden.
Nachdem Sie die Servohebel montiert haben, rufen Sie an Ihrem Fernsteuersender ein Helikopterprogramm mit einer 3Punkt 120° Taumelscheibenanlenkung (HR-3) auf.
Stellen Sie die korrekte Laufrichtung und die exakte Mittelstellung der Servos ein. Die drei Servohebel der Taumelscheibenservos
müssen dann exakt auf einer Linie waagerecht zueinander ausgerichtet sein (siehe kleine Skizze), wenn sich der PitchSteuerknüppel in der Mittelstellung befindet.
Untere Abbildung:
Die Montage der Taumelscheibenführung und der Rotorblätter schließen den Aufbau der Mechanik ab. Achten Sie bei der
Montage der Taumelscheibenführung darauf, dass die Seite mit der geringeren Höhe des Führungsschlitzes in Flugrichtung
nach vorne montiert wird.
Die Rotorblattschrauben dürfen nur so fest angezogen werden, dass sich die Rotorblätter im Flug noch 180° zueinander
ausrichten können.
11

Seite 15
Überprüfen der Steuerrichtungen:
Obere Abbildung:
Die Abbildung zeigt die Höhen-Steuerung des Modellhubschraubers, wobei die jeweiligen Knüppelbewegungen bei Fernsteueranlagen in Mode I und Mode II dargestellt sind.
Soll der Anstellwinkel der Rotorblätter zum Steigen vergrößert werden, muss die Taumelscheibe auf der Hauptrotorwelle
von den Servos nach oben verschoben werden. Achten Sie dabei darauf, dass die Taumelscheibe bei den vertikalen Bewegungen immer waagerecht bleibt und nicht zur Seite kippt.
Mittlere Abbildung:
Die Abbildung zeigt die Richtungs-Steuerung des Modellhubschraubers. Die Taumelscheibe muss dazu immer in die Richtung kippen, in die auch gesteuert wurde. Achten Sie dabei darauf, dass die Taumelscheibe nach rechts und links den
gleichen Neigungswinkel aufweist. Der Neigungswinkel nach vorne und hinten muss ebenfalls gleich sein.
Untere Abbildung:
Die Abbildung zeigt die Heck-Steuerung des Modellhubschraubers. Wird an der Fernsteuerung nach rechts gelenkt, muss
die Schiebehülse der Heckrotoranlenkung auf der Heckrotorwelle in Richtung Getriebegehäuse verschoben werden. Sollte
dies nicht der Fall sein, ändern Sie am Sender die Laufrichtung des Heckservos.
Überprüfen Sie in diesem Zusammenhang gleich die Wirkrichtung des Kreisels. Wird die Rumpfspitze des Hubschraubers
von oben gesehen entgegen dem Uhrzeigersinn nach links gedreht, muss die Schiebehülse durch den Kreisel ebenfalls in
Richtung Getriebegehäuse verschoben werden. Sollte dies nicht der Fall sein, so ändern Sie am Kreisel die Laufrichtung des
Heckservos. Anschließend stellen Sie am Kreisel noch die maximalen Ausschläge des Heckservos ein.
Seite 16
Obere Abbildung:
Die Abbildung zeigt die schematische Darstellung einer Gas- (Throttle) und einer Pitchkurve für den Normalflug (Normal
Flight) und für den extremen Kunstflug (Freestyle/Aggressive).
Bitte betrachten Sie diese Werte aber lediglich als Anhaltspunkte für Ihre persönlichen Einstellungen, die Sie im praktischen
Flugbetrieb ermitteln müssen.
Untere Abbildung:
Bevor Sie mit einer Pitch-Waage die Blattanstellwinkel messen, überprüfen Sie, ob die Taumelscheibe, die Pitchkompensator-Hebel und die Blatthalter-Anlenkhebel parallel zueinander ausgerichtet sind. Der Rotorblattanstellwinkel muss dabei 0°
betragen.
Wenn Sie den Steuerknüppel für die Pitchfunktion (im Normalflug) ganz nach unten bewegen, sollten Sie einen Anstellwinkel von -2 bis -3 ° an den Rotorblättern messen können. Wird der Steuerknüppel ganz nach oben bewegt, sollten die
Rotorblätter einen Anstellwinkel von 13° erreichen. Der maximale negative Pitchwinkel (beim Kunstflug) beträgt -13°.
Der kollektive Pitchwinkel beträgt max. +/- 13° und der Zyklische Pitchwinkel 10°.
12

Seite 17
Überprüfungen vor dem Start
Obere Abbildung:
Bevor Sie das Modell in Betrieb nehmen, überprüfen Sie folgende Punkte:
1. Überprüfen Sie alle Verschraubungen auf festen Sitz.
2. Überprüfen Sie das Zahnflankenspiel zwischen Motorritzel und Hauptzahnrad. Die Zahnräder müssen sicher ineinander
greifen und trotzdem soll das Getriebe leicht laufen.
3. Überprüfen Sie den Antrieb des Heckrotors. Alle Mechanik-Komponenten des Heckrotorantriebes müssen zuverlässig
und leichtgängig funktionieren.
4. Überprüfen Sie den korrekten und sicheren Sitz der Elektrik-Komponenten und des Antriebsakkus. Achten Sie dabei auf
den erforderlichen Abstand des Antriebsakkus zum Elektromotor. Er sollte 5 bis 10 mm betragen.
5. Achten Sie auf einen sicheren Sitz des Antriebsakkus. Verwenden Sie zusätzlich zu den Akku-Befestigungsschlaufen
noch selbstklebendes Klettband. Das Klettband mit den Haken wird auf die Akkuauflage und das flauschige Teil des
Klettbandes wird an den Akku geklebt.
6. Überprüfen Sie, ob die Rotorblätter korrekt ausgewuchtet sind. Achten Sie zudem während der ersten Flüge auf einen
korrekten Spurlauf und stellen diesen bei Bedarf nach.
7. Überprüfen Sie alle Wellen und Kugellager auf leichtgängigen und korrekten Rundlauf.
8. Überprüfen Sie die komplette Verkabelung. Achten Sie dabei besonders auf die Verbindungen zwischen Drehzahlsteller
und Motor.
Untere Abbildung:
9. Überprüfen Sie die Stellung des Heckservos und des Heckrotors. In der Grundstellung muss der Servohebel im 90°Winkel zur Anlenkung stehen (siehe Bild 1-4). Der Anlenkhebel der Heckrotor-Schiebehülse muss dann ebenfalls im
90°-Winkel zur Heckrotorwelle stehen (siehe Bild 1-5).
10. Überprüfen Sie die Leichtgängigkeit der Heckrotoranlenkung (Bild 1-6 und 1-7).
11. Nach dem Einschalten des Senders und dem Anschließen des Flugakkus überprüfen Sie die korrekte Bewegungsrichtung der Taumelscheibenservos und des Heckrotors. Wenn Sie den Hubschrauber entgegen dem Uhrzeigersinn um
die Rotorwelle drehen, muss der Kreisel die Schiebehülse der Heckrotoranlenkung in Richtung Getriebegehäuse bewegen.
Seite 18
Überprüfungen nach jedem Flug
Unmittelbar nach dem Flug sollten Sie folgende Punkte prüfen:
1. Überprüfen Sie alle Verschraubungen auf festen Sitz (siehe auch Seite 16).
2. Überprüfen Sie das Zahnflankenspiel zwischen Motorritzel und Hauptzahnrad. Achten Sie dabei besonders auf abnormalen Verschleiß oder defekte Zähne.
3. Überprüfen Sie das Antriebsgetriebe des Heckrotors (siehe auch Seite 16).
4. Überprüfen Sie den korrekten und sicheren Sitz der Elektrik-Komponenten (siehe auch Seite 16).
5. Überprüfen Sie alle Wellen und Kugellager auf leichtgängigen und korrekten Rundlauf (siehe auch Seite 16).
6. Überprüfen Sie die Temperatur von Motor, Akku und Drehzahlsteller.
Wichtig!
Lassen Sie den Motor und den Drehzahlsteller erst wieder auf Umgebungstemperatur abkühlen, bevor Sie mit
einem bereits geladenen Ersatz-Flugakku erneut starten.
13
Gründliche Wartung
1. Überprüfen Sie, ob sich Schrauben gelockert haben oder Bauteile nicht mehr fest verschraubt sind.
2. Überprüfen Sie das Zahnflankenspiel zwischen Motorritzel und Hauptzahnrad. Achten Sie dabei besonders darauf, ob
sich der Motor gelockert hat und so die Zähne der beiden Zahnräder nicht mehr sauber ineinandergreifen.
3. Überprüfen Sie das Zahnflankenspiel am Heckrotorantrieb. Die Zahnräder müssen kraftschlüssig ineinander greifen
und müssen trotzdem leichtgängig laufen.
4. Achten Sie auf den sauberen Rundlauf der unterschiedlichen Wellen. Selbst leichte Bodenberührungen der Rotorblätter
können zu erheblichen Verformungen der Wellen führen.
5. Überprüfen Sie alle Kugellager auf sauberen Rundlauf. Lager, die bei der Betätigung von Hand ein „rollendes“ oder
„knirschendes“ Gefühl erzeugen, sind ebenso wie sichtbar beschädigte Kugellager unverzüglich auszutauschen.
6. Überprüfen Sie die Hilfspaddel. Die Paddel müssen immer exakt ausgerichtet sein (siehe Seite 12 obere Abbildung und
die Paddelstange darf nicht verbogen sein).
Seite 19
Obere Abbildung:
Die Abbildung zeigt den Ausbau der Hauptrotorwelle. Die einzelnen Arbeitsschritte sind auf der Zeichnung mit Nummern
versehen.
1. Entfernen Sie die Schrauben der Taumelscheibenführung #208876 und nehmen Sie die Taumelscheibenführung ab.
2. Clipsen Sie die drei Anlenkgestänge für die Taumelscheibe #208401 an den Servohebeln ab.
3. Entfernen Sie die Rotorwellenschraube #208864 am Hauptgetriebe.
4. Lösen Sie die Madenschrauben #208865 am Rotorwellenstellring.
5. Ziehen Sie die Rotorwelle zusammen mit dem Rotorkopf nach oben aus der Mechanik.
6. Entfernen Sie die Rotorkopfschraube #208864 und ziehen Sie den Rotorkopf von der Welle ab.
Untere Abbildung:
Die Abbildung zeigt die Demontage des Hauptgetriebes. Die einzelnen Arbeitsschritte sind auf der Zeichnung mit Nummern
versehen.
1. Bauen Sie zunächst die Hauptrotorwelle aus (siehe oben).
2. Entfernen Sie den Sicherungsring #208368 an der Unterseite des Hauptgetriebes.
3. Entfernen Sie die drei Schrauben #208855 und entnehmen Sie das Mittelstück #208360.
4. Entnehmen Sie die Distanzscheibe #208883.
5. Nach dem Entfernen der Schrauben #208858 kann das Bodenstück #208358 und der Freilauf entnommen werden.
Achtung!
Um den Freilauf später wieder richtig einzusetzen, empfehlen wir Ihnen die untere Seite mit einem Faserstift zu
markieren. Beim Zusammensetzen muss das Mittelstück #208360 entsprechend der Zeichnung geölt werden.
14
Seite 20
Obere Abbildung:
Die Abbildung zeigt den schematischen Aufbau des Rotorkopfes. Mit den Gummiringen #208902 (75°) bzw. #208912 (90°)
kann die Dämpfung des Rotorkopfes (weich oder hart) beeinflusst werden. Die einzelnen Arbeitsschritte zur Demontage
sind auf der Zeichnung mit Nummern versehen.
Wichtig!
Bitte beachten Sie, dass die innere Lagerscheibe des Axialkugellagers im Hauptrotorblatt-Halter eine größere
Bohrung aufweist (siehe Skizze oben rechts).
Untere Abbildung:
Die Abbildung zeigt den schematischen Aufbau des Heckrotors. Die einzelnen Arbeitsschritte zur Demontage sind auf der
Zeichnung mit Nummern versehen.
Seite 21 - 29
Auf den Seiten 21 bis 28 finden Sie die Explosionszeichnungen der einzelnen Baugruppen mit den dazugehörigen Ersatzteilbezeichnungen und Ersatzteilnummern.
Achtung!
Bitte beachten Sie, dass die 6stelligen Nummern im Hersteller-Handbuch keine Conrad-Bestellnummern sind!
Eine aktuelle Liste der Ersatzteile mit den entsprechenden Conrad Electronic-Bestellnummern finden Sie auf
www.conrad.com im Download-Bereich bei den jeweiligen Modellhubschraubern.
15
9. Wartung und Pflege
Um die Betriebssicherheit Ihres Modellhubschraubers zu gewährleisten, sind regelmäßige Kontrollen und Wartungsarbeiten
durchzuführen (siehe Hersteller-Handbuch/Montageanleitung Seite 17 und 18).
Wichtig!
Müssen beschädigte oder verschlissene Teile erneuert werden, so setzen Sie nur Original-Ersatzteile in Ihrem
Helikopter ein.
Die Ersatzteilliste finden Sie auf der Internetseite www.conrad.com im Download-Bereich zum jeweiligen Produkt.
Alternativ können Sie die Ersatzteilliste auch telefonisch anfordern. Die Kontaktdaten finden Sie am Anfang dieser Bedie-
nungsanleitung im Kapitel „Einführung“.
10. Entsorgung
a) Allgemein
Entsorgen Sie das Produkt am Ende seiner Lebensdauer gemäß den geltenden gesetzlichen Vorschriften.
b) Batterien und Akkus
Sie als Endverbraucher sind gesetzlich (Batterieverordnung) zur Rückgabe aller gebrauchten Batterien und Akkus verpflichtet; eine Entsorgung über den Hausmüll ist untersagt!
Schadstoffhaltige Batterien/Akkus sind mit nebenstehendem Symbol gekennzeichnet, das auf das Verbot der
Ihre verbrauchten Batterien/Akkus können Sie unentgeltlich bei den Sammelstellen Ihrer Gemeinde, unseren Filialen oder
überall dort abgeben, wo Batterien/Akkus verkauft werden.
Sie erfüllen damit die gesetzlichen Verpflichtungen und leisten Ihren Beitrag zum Umweltschutz.
Entsorgung über den Hausmüll hinweist. Die Bezeichnungen für das ausschlaggebende Schwermetall sind:
Cd=Cadmium, Hg=Quecksilber, Pb=Blei (Bezeichnung steht auf Batterie/Akku z.B. unter dem links abgebildeten
Mülltonnen-Symbol).
16

11. Technische Daten
Rumpflänge inkl. Kabinenhaube....................... 1020 mm
Hauptrotordurchmesser .................................. 1120 mm
Hauptrotorblattlänge ....................................... 500 – 550 mm
Höhe ............................................................. 343 mm
Breite ............................................................. 165 mm
Heckrotordurchmesser .................................... 230 mm
Heckrotorblattlänge ........................................ 82 mm
Gewicht ohne Flugakku ................................... 1850 g
Empfohlener Elektromotor ............................... 1820 W, 910 KV
Empfohlener Drehzahlsteller ............................ 100 A
Digital-Servo „GU-501“
Abmessungen................................................. 40,0 x 19,5 x 36,5 mm
Gewicht ......................................................... 58,5 g
Stellzeit 4,8 / 6 V ............................................ 0,16 / 0,13 s
Stellmoment 4,8 / 6 V ..................................... 8,0 / 9,5 kg/cm
Haltemoment 4,8 / 6 V ................................... 16,0 / 19,0 kg/cm
Getriebe ......................................................... Teil-Metallgetriebe
Lagerung ....................................................... Doppelt kugelgelagert
Digital-Servo „GU-502“
Abmessungen................................................. 40,0 x 19,5 x 36,5 mm
Gewicht ......................................................... 58,5 g
Stellzeit 4,8 / 6 V ............................................ 0,07 / 0,06 s
Stellmoment 4,8 / 6 V ..................................... 4,0 / 4,5 kg/cm
Haltemoment 4,8 / 6 V ................................... 8,0 / 9,0 kg/cm
Getriebe ......................................................... Teil-Metallgetriebe
Lagerung ....................................................... Doppelt kugelgelagert
17
12. Heading Lock Gyro „GU 211“
Produktbeschreibung:
Bei diesem Kreiselsystem handelt es sich um ein kompaktes Stabilisierungssystem, das mit Hilfe eines MEMS-Sensors
Lageänderungen erkennt. Über eine integrierte Elektronik wird ein nachgeschaltetes Servo angesteuert, um so den Lageänderungen entgegenwirken zu können. Aufgrund der kompakten Bauweise und des geringen Gewichtes ist dieses System
auch ideal für kleinere Modellhubschrauber mit Elektroantrieb geeignet.
Der Kreisel kann wahlweise im Normal-Modus oder im AVCS-Modus (Angular Vector Control System) betrieben werden.
Im Normal-Modus erfolgt eine Korrektur des nachgeschalteten Servos nur solange, wie auch eine Drehbewegung des
Modells vom Kreisel erkannt wird.
Im AVCS-Modus (Head Lock-Modus) erfolgt eine Korrektur des nachgeschalteten Servos solange, bis die ursprüngliche
Ausgangslage (Winkelstellung) des Kreisels wieder erreicht ist.
Die Kreiselwirkung ist einstellbar und kann über den Sender justiert bzw. umgeschaltet werden.
Leistungsmerkmale:
• MEMS- (Micro Electro Mechanical System) Drehratensensor und AVCS- (Angular Vector Control System) Mode
• Eingebaute Temperaturkompensation
• Normal- und Heading Hold- (AVCS) Mode mit externer Empfindlichkeitseinstellung
• Digitale Signalverarbeitung
• Programmierung über „SET“-Taste
• Für Analog- und Digital-Servos geeignet
Achtung, wichtig!
Der Kreisel ist nicht mit den Servos Futaba S9251, S9256, BLS251 und JR-2700G, 8700G, 810G kompatibel.
Falls Sie den Kreisel mit einem Analog-Servo betreiben wollen, schließen Sie das Servo erst dann an, nachdem Sie
im Programmier-Modus den Kreisel auf analoge Servos umgestellt haben. Falls Sie die Umstellung nicht durchfüh-
ren und der Kreisel auf Digital-Servos eingestellt ist, besteht die große Gefahr, dass das analoge Servo in kurzer
Zeit zerstört wird.
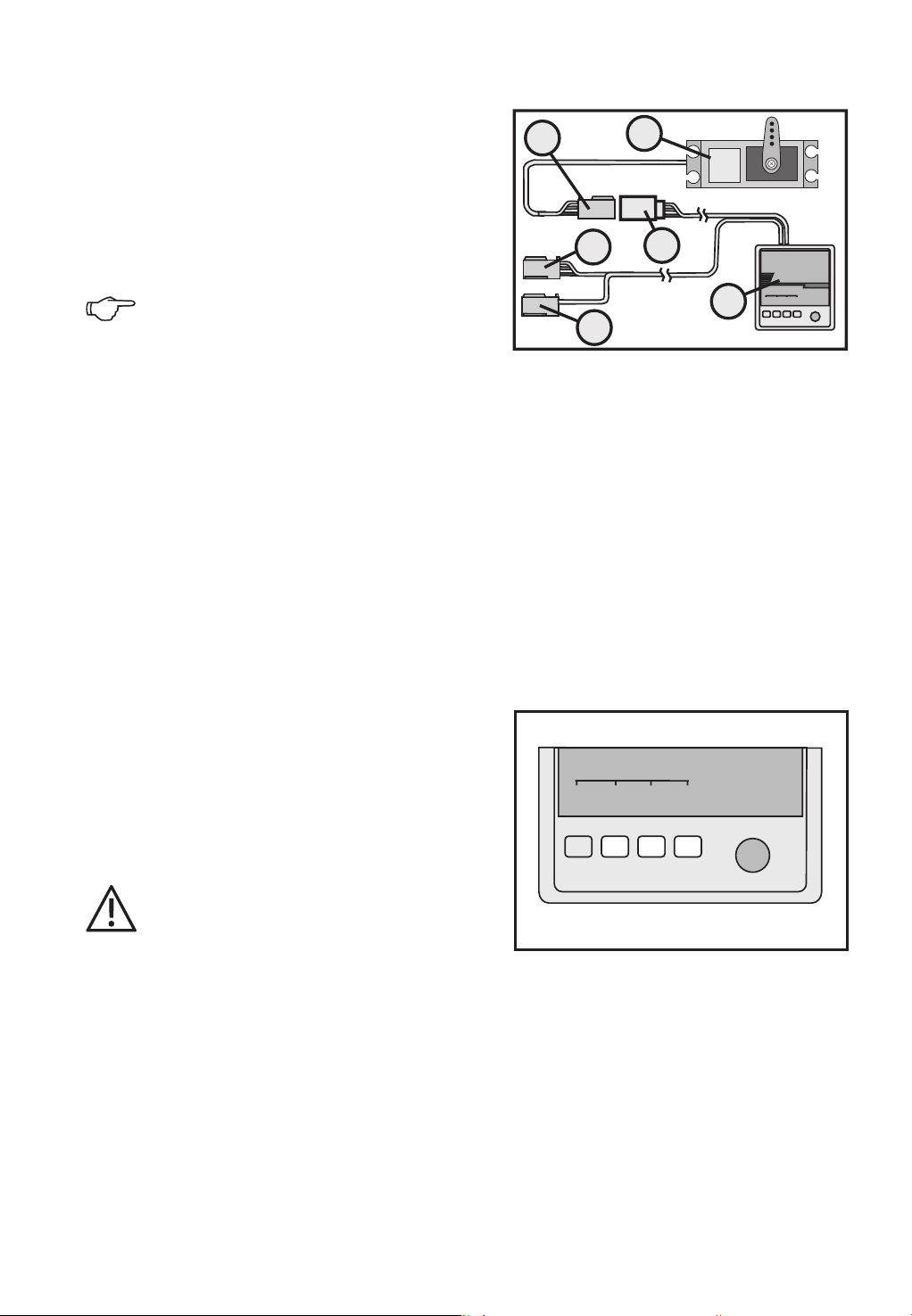
Anschlüsse und Zubehör
Achtung wichtig!
Nehmen Sie den Kreisel erst dann in Betrieb, wenn Sie die folgenden Kapitel komplett durchgelesen haben und
wissen, worauf beim Einbau und beim Betrieb zu achten ist. Nur so lassen sich Fehlfunktionen oder gar Beschä-
digungen vermeiden.
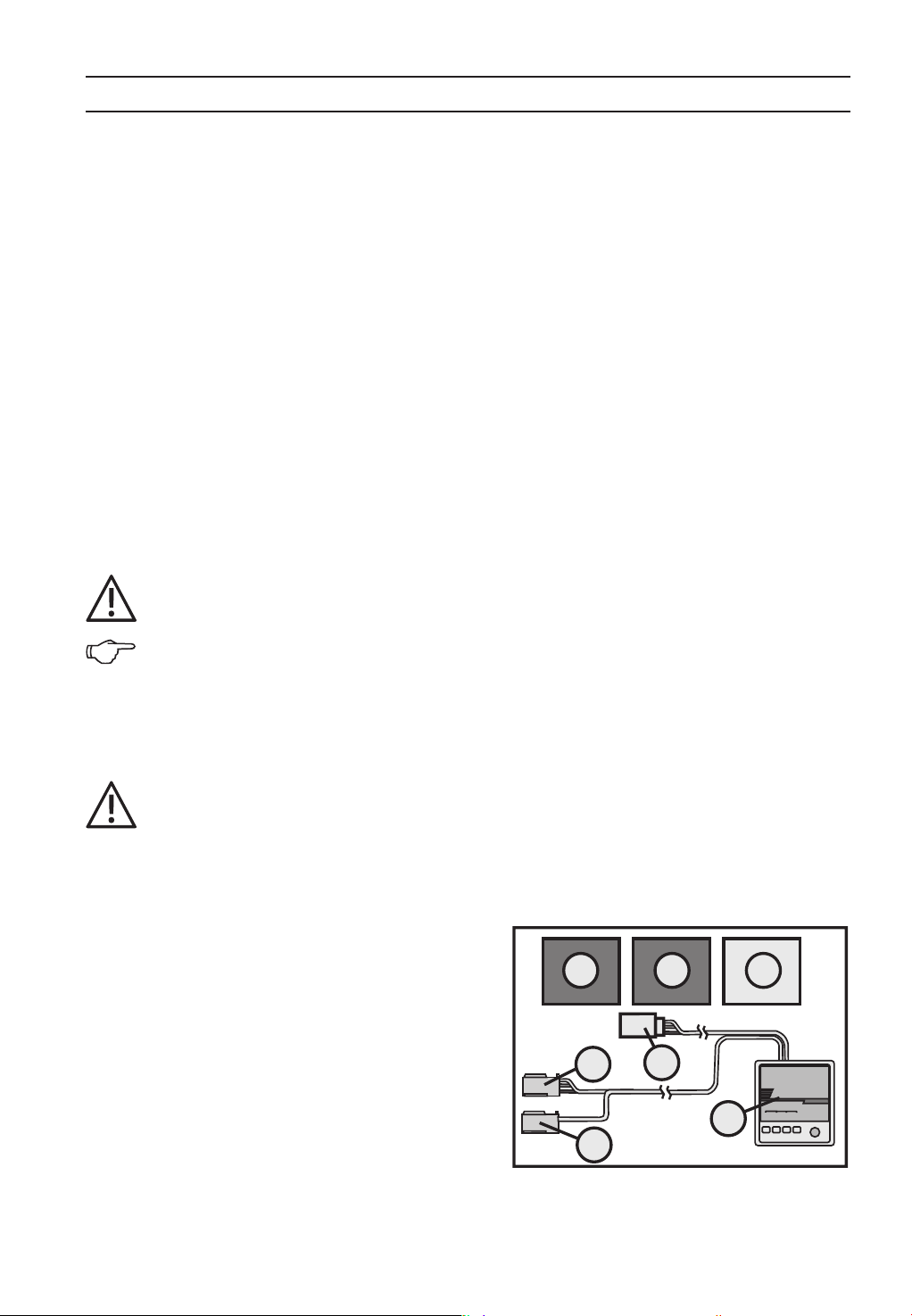
Der Kreisel wird am Empfängerausgang für das Heckservo angeschlossen. Das Heckservo selbst wird wiederum direkt am
Kreiselsystem angesteckt. Somit ist der Kreisel zwischen Empfänger und Heckservo geschaltet. Zusätzlich wird der Kreisel
mit einem weiteren Empfängerausgang verbunden, über den später die Empfindlichkeitsregelung erfolgt.
1. Kreisel
2. Empfänger-Anschluss für die Kreiselempfindlichkeit
3. Empfänger-Anschluss für das Heckservo
4. Anschluss-Stecker für das Heckservo
5. Zwei doppelseitige Klebebänder
6. Metallplatte
5 5
3
4
1
6
QUEC
GU-211
1
S
2
GAUI
GYRO
3
SET
2
18
Bild 1
Einbau des Kreisels
Achten Sie beim Einbau des Kreisels immer darauf, dass Sie einen
Einbauort wählen, an dem der Kreisel gut vor Vibrationen und
Wärmeschwankungen geschützt ist.
In vielen Fällen geben die Hersteller der jeweiligen Modellhubschrauber den exakten Montageort für den Kreisel vor.
Sollte dies an Ihrem Modell nicht der Fall sein, wählen Sie einen
Einbauort, der nahe an der Hauptrotorwelle liegt.
Die Montageplattform, auf der Sie den Kreisel anbringen, muss
dabei im 90°-Winkel zur Hauptrotorwelle stehen.
Verwenden Sie für die Befestigung ausschließlich den beiliegenden, doppelseitig klebenden Schaumstoff (siehe Skizze A).
Die Stabilisierungsachse des Kreisels verläuft bei korrekter Montage parallel zur Hauptrotorwelle.
Achtung:
Sollte der Hubschrauber während des Fluges zur Seite drehen, so kann das an Schwingungen der Mechanik
liegen. Bei hochfrequenten Schwingungen kann es hilfreich sein, beide Schaumstoff-Klebepads zu verwenden und
dabei die Metallplatte dazwischen zu kleben (siehe Bild 2, Skizze B).
Die am Kreisel angeschlossenen Kabel müssen so verlegt werden, dass sie keine mechanischen Erschütterungen
auf den Kreisel übertragen können und auch nicht in drehende Teile der Mechanik gelangen können, bzw. an
scharfen Kanten durchgescheuert werden.
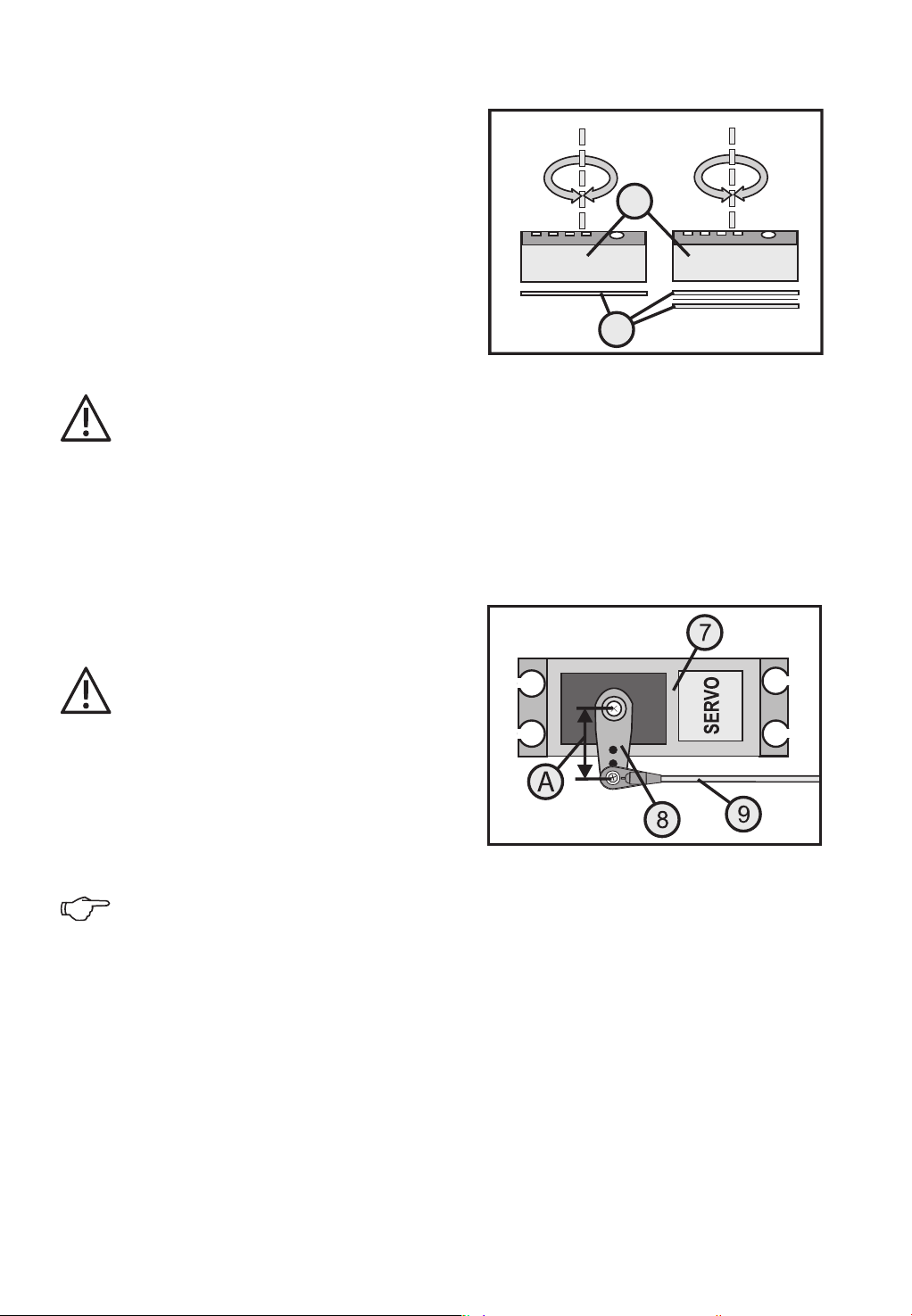
Montage des Heckservos
Die Montage des Heckservos (7), sowie die Einstellung des Heckrotors sind im Regelfall in den Unterlagen des Modellhubschraubers
exakt vorgegeben.
Achtung wichtig!
Um eine optimale Wirkung des Kreisels zu erzielen,
müssen der Servohebel (8) und das Anlenkgestänge (9)
im 90°-Winkel zueinander stehen (Neutralposition).
Der Abstand (A) richtet sich nach der Modellgröße und ist im
Regelfall in den Unterlagen des Modellhubschraubers angegeben.
Falls keine Angaben vorliegen, verwenden Sie bitte folgende Werte:
Bei Standard-Servos: 12 – 17 mm
Bei Mini-/Micro-Servos: 8 – 15 mm
Achten Sie auch auf eine absolut leichtgängige und zugleich spielfreie Anlenkung des Heckrotors.
A
1
B
5
Bild 2
Bild 3
19
Anschließen des Kreisels
Schließen Sie den Kreisel mit dem 3poligen Anschlusskabel (3)
am Empfängerausgang für das Heckservo an.
Schwarz = Minus
Rot = Plus
Weiß = Impuls
Verbinden Sie den 1poligen Regeleingang (Gelb = Impulsleitung)
des Kreisels (2) mit einem freien Kanal des Empfängers, der am
Sender mit einem Schieberegler gesteuert wird.
Welche Ausgänge am Empfänger belegt werden müs-
sen, ist vom Hersteller der Fernsteuerung abhängig und
kann in den Unterlagen der verwendeten Anlage nach-
gelesen werden.
Das Heckrotor-Servo (7) wird direkt am Anschluss-Stecker für das
Heckservo (4) angeschlossen. Achten Sie dabei auf die richtige
Polung des Servo-Steckers (8).
8
7
3
4
SERVO
1
QUEC
GU-211
1
3
S
2
GAUI
GYRO
SET
2
Bild 4
Inbetriebnahme des Kreisels
Bevor Sie den Kreisel in Betrieb nehmen, müssen sämtliche im Sender programmierte Heck-Mischprogramme, wie z.B.
Revolution-Mix oder auch Kreisel-Ausblendmischer, deaktiviert werden.
Der Kreisel verfügt über keinen eigenen Funktionsschalter. Die Stromversorgung erfolgt über den 3poligen Steckanschluss,
der mit dem Empfänger verbunden ist. Sobald die Empfangsanlage eingeschaltet wird, ist auch der Kreisel in Betrieb.
Der Steuerknüppel für die Heckfunktion, sowie der dazugehörige Trimmhebel, müssen immer in der Mittelstellung stehen,
bevor Sie die Empfangsanlage und somit auch den Kreisel in Betrieb nehmen. Der Heckrotor sollte dann so ausgerichtet
sein, dass der Hubschrauber im Schwebeflug keine Tendenz aufweist, zur Seite zu drehen (Werkseinstellung).
Initialisierung des Kreisels
Für eine ordnungsgemäße Funktion muss der Kreisel initialisiert
werden. Dieser interne Abgleich geschieht automatisch unmittelbar nach dem Einschalten der Empfangsanlage und dauert ca.
2 -3 Sekunden. Während dieser Zeit darf das Modell, und somit
auch der Kreisel, nicht bewegt bzw. gedreht werden.
Zum Zeichen der Initialisierung leuchtet die LED S zunächst orange und anschließend je nach eingestelltem Betriebszustand rot
(Normal-Modus) oder grün (AVCS-Modus). Die LEDs 1- 3 leuchten erst rot, dann grün und anschließend gehen sie aus.
Achtung!
Da der Kreisel nur dann ordnungsgemäß arbeitet, wenn
er im AVCS-Modus initialisiert wird, ist es erforderlich,
den Schieberegler für die Kreiselempfindlichkeit noch vor
der Initialisierung in den AVCS-Modus (Heading Hold)
zu stellen.
S
12
3
SET
Bild 5
20
LED-Statusanzeigen
Neben der Initialisierung werden noch weitere Kreisel-Zustände mit Hilfe der LEDs angezeigt.
Die LED S leuchtet grün
Der Kreisel befindet sich im AVCS-Modus. Der Hecksteuerknüppel ist nicht ausgelenkt.
Die LED S blinkt im 2er Rhythmus grün
Der Kreisel arbeitet im AVCS-Modus. Der Hecksteuerknüppel ist ausgelenkt bzw. die Trimmung wurde verstellt.
Die LED S leuchtet rot
Der Kreisel befindet sich im Normal-Modus. Der Hecksteuerknüppel ist nicht ausgelenkt.
Die LED S blinkt im 2er Rhythmus rot
Der Kreisel arbeitet im Normal-Modus. Der Hecksteuerknüppel ist ausgelenkt bzw. die Trimmung wurde verstellt.
Die LED S blinkt kontinuierlich langsam orange
Der Kreisel erhält kein gültiges Empfängersignal mehr.
Die LED S blinkt kontinuierlich langsam orange und die LEDs 1 -3 leuchten grün
Der Kreisel konnte wegen eines fehlenden Empfängersignals keine Initialisierung durchführen.
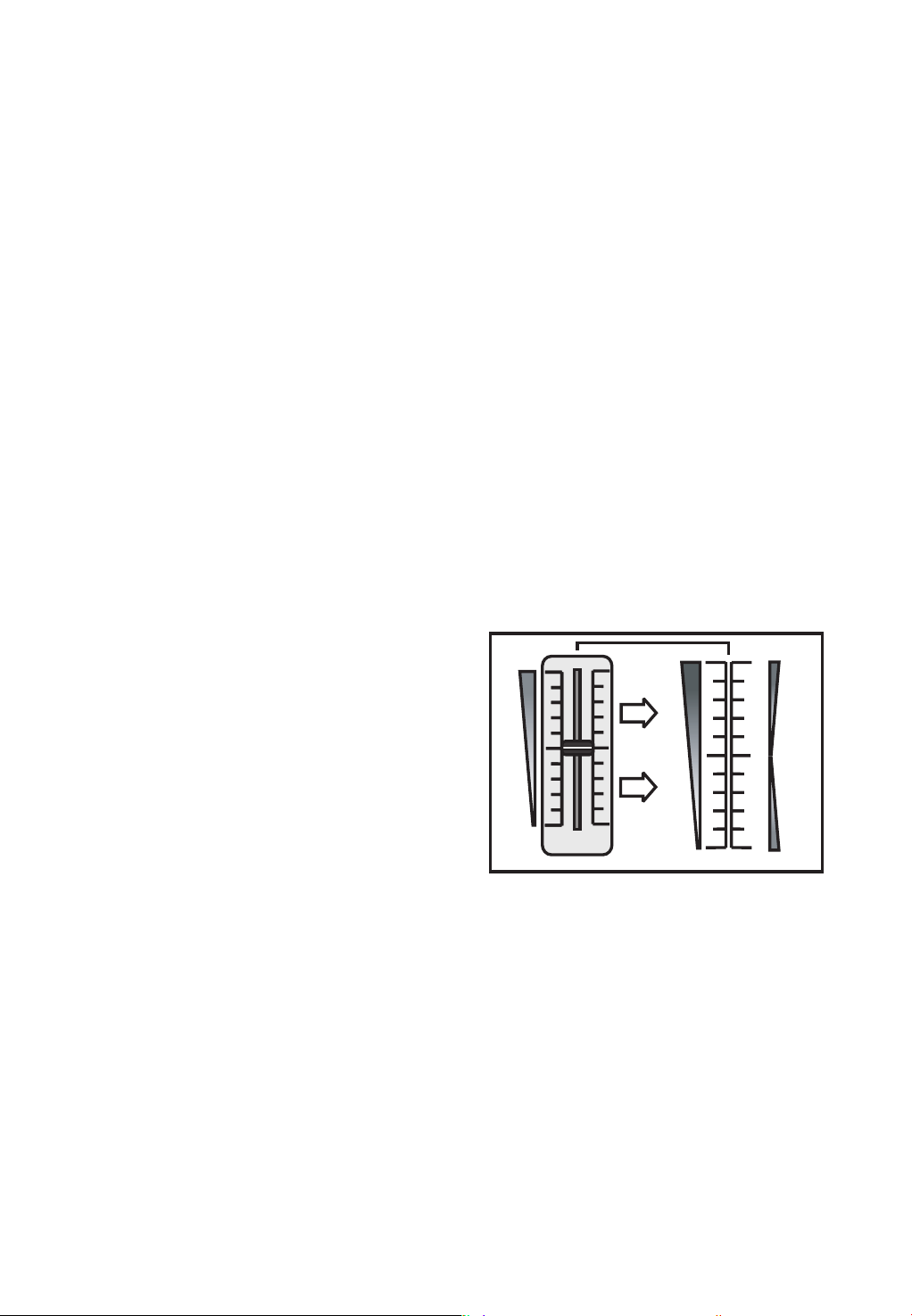
Einstellen der Betriebsart AVCS/Normal und der Kreiselempfindlichkeit
Die Betriebsart sowie die Kreiselempfindlichkeit von 0 – 100% lassen sich am Sender am besten mit einem Schieberegler
(Geber) einstellen.
Bei der Empfindlichkeits-Einstellung von 0% ist die stabilisierende Wirkung des Kreisels abgeschaltet und bei 100% ist die
höchste Kreisel-Empfindlichkeit erreicht. Dann reichen bereits minimale Richtungsänderungen des Kreisels, um große Korrekturausschläge am angeschlossenen Servo zu erzeugen.
Mit Hilfe des Schiebereglers (Geber) am Sender wird nicht nur die
Kreisel-Empfindlichkeit eingestellt, sondern zugleich auch die Betriebsart umgeschaltet. Aus diesem Grund entspricht die Mittelstellung des Schiebereglers (50%-Geberweg) einer Kreiselempfindlichkeit von 0%.
Je nach Steuerrichtung am Geber wird die Empfindlichkeit des
Kreisels im Normal-Modus oder im AVCS-Modus erhöht.
Die beiden Endstellungen des Schiebereglers (0% bzw.100%
Geberweg) entsprechen dann immer der maximalen Kreiselempfindlichkeit von 100%.
Bei einer Gebereinstellung von 0 – 50% arbeitet der Kreisel im
Normal-Modus (die LED S leuchtet rot) und bei einer Gebereinstellung von 50 - 100% arbeitet der Kreisel im AVCS-Modus (die
LED S leuchtet grün).
Anstelle eines Schiebereglers kann auch ein Kippschalter für die Umschaltung der Betriebsart eingesetzt werden. In diesem
Fall sind im Sender die erforderlichen Einstellwerte im ATV-Menü (Wegeinstellung der Steuergeber) zu programmieren.
In Verbindung mit einer Flugzustandsumschaltung kann so für den Schwebeflug, für den Rundflug und für den Kunstflug
eine individuelle Kreiselempfindlichkeit programmiert werden.
100%
50%
0%
LINEAR
100%
50%
0%
100%
50%
AVCS-Modus
0%
50%
Normal-Modus
100%
Bild 6
21
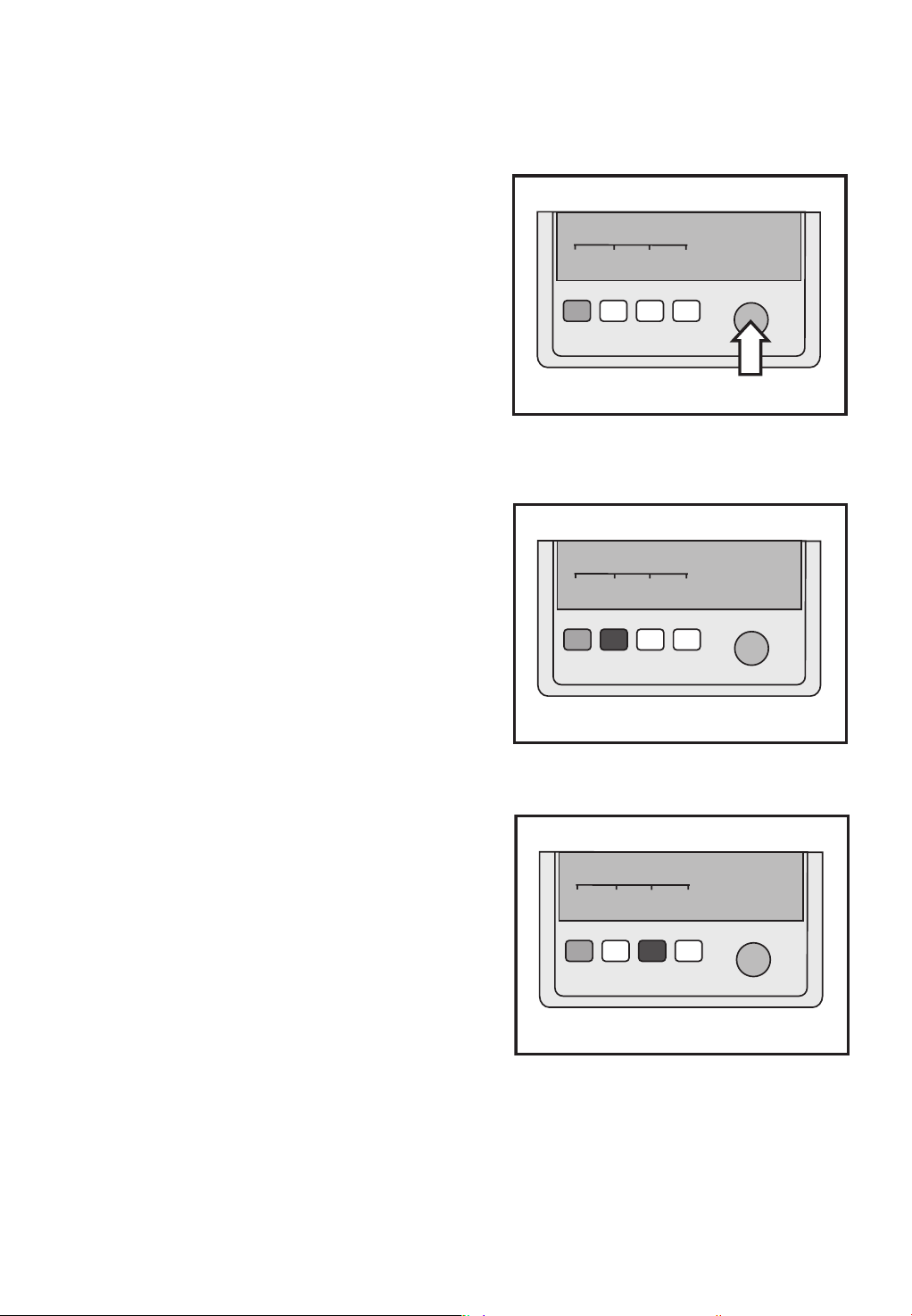
Programmierung des Kreisels
Der Kreisel wird mit Hilfe der SET-Taste und dem Hecksteuerknüppel des Senders programmiert. Machen Sie keine zu
großen Pausen zwischen den einzelnen Programmierschritten, da sonst der Kreisel fehlerhaft reagiert. In diesem Fall schalten Sie die Stromversorgung des Kreisels ab und nehmen ihn nach einigen Sekunden wieder erneut in Betrieb.
• Nehmen Sie dazu den Kreisel im AVCS-Modus in Betrieb, sodass
die LED S grün leuchtet.
• Halten Sie mit einem kleinen Schraubendreher o.ä. die Set-Taste
für ca. 3 Sekunden gedrückt.
• Sobald die LED 1 leuchtet, lassen Sie die SET-Taste los.
• Die LED S wechselt die Farbe von Grün auf Orange und zeigt so
den Programmier-Modus an
S
1
3
2
SET
3 sec.
Bild 7
Auswahl des Servotyps
• Mit Hilfe des Hecksteuerknüppels können Sie nun die Leucht-
farbe der LED 1 umschalten und so den erforderlichen Servotyp
auswählen.
Grün = Digital-Servo
Rot = Analog-Servo
S
12
3
SET
Drehrichtung des Heckservos ändern
• Betätigen Sie erneut die SET-Taste.
• Die LED 1 erlischt und die LED 2 leuchtet.
• Mit Hilfe des Hecksteuerknüppels können Sie nun die Leucht-
farbe der LED 2 umschalten und so die Laufrichtung des Servos
ändern.
Grün = Normale Laufrichtung
Rot = Umgekehrte Laufrichtung
22
S
12
Bild 8
3
SET
Bild 9
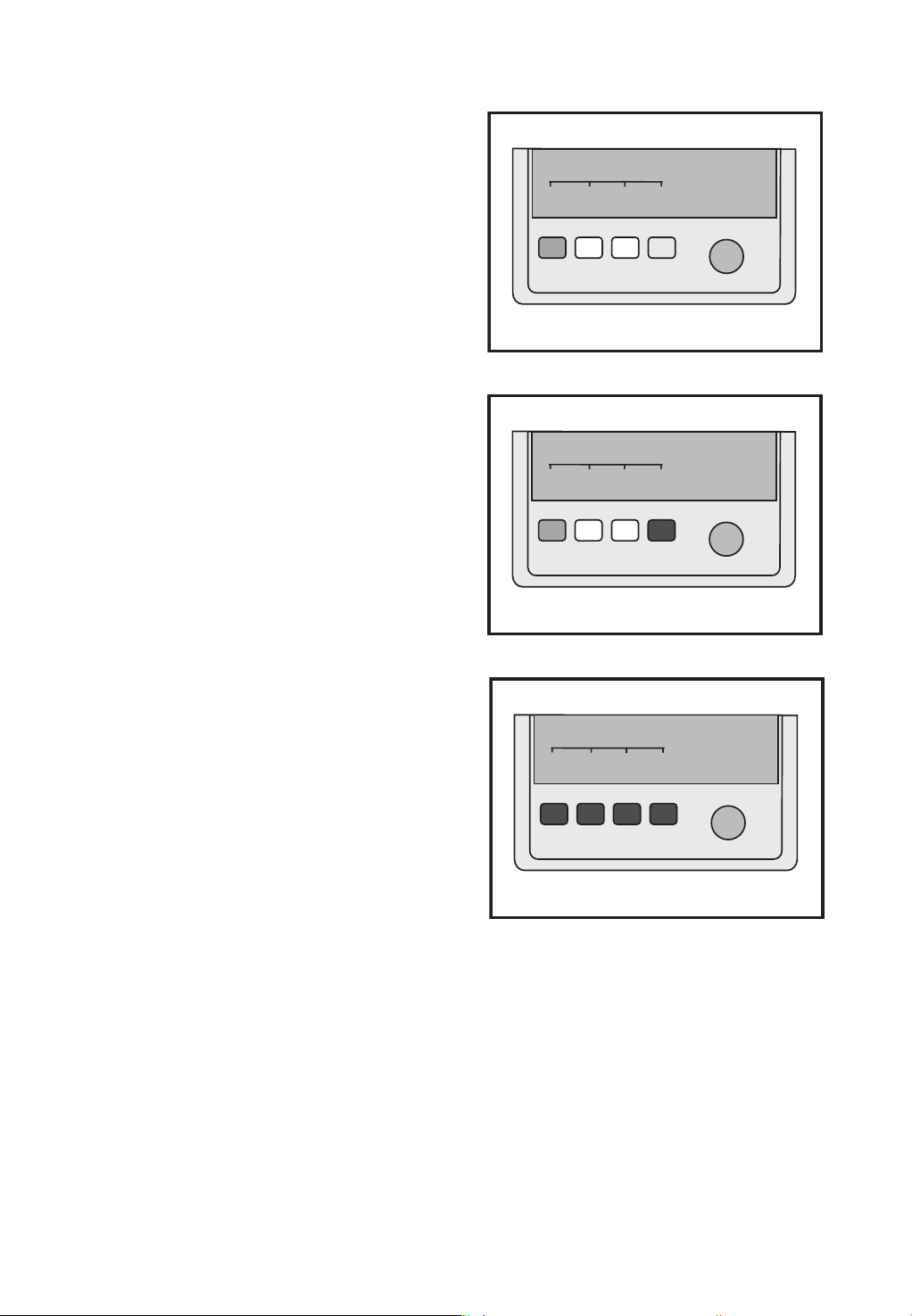
Einstellen des maximalen Servo-Ausschlages
• Betätigen Sie erneut die SET-Taste.
• Die LED 2 erlischt und die LED 3 leuchtet grün und gleichzeitig
läuft der Hebel des Heckservos auf eine Seite in den
Endausschlag.
• Mit Hilfe des Hecksteuerknüppels können Sie nun den maximalen Servo-Ausschlag auf dieser Seite einstellen.
Je nachdem in welche Richtung der Hecksteuerknüppel ausgelenkt wird, vergrößert oder verkleinert sich der Servo-Ausschlag.
• Betätigen Sie erneut die SET-Taste.
• Die LED 3 leuchtet nun rot und der Servohebel läuft auf die
andere Seite in den Endausschlag.
• Mit Hilfe des Hecksteuerknüppels können Sie nun auch auf dieser Seite den maximalen Servo-Ausschlag einstellen.
S
S
12
12
3
3
SET
Bild 10
SET
• Betätigen Sie erneut die SET-Taste.
• Alle vier LEDs leuchten rot und zeigen so an, dass die eingestellten Werte nun gespeichert werden können. Sollte jetzt die
Stromversorgung unterbrochen werden, so wären alle zuvor geänderten Einstellungen unwirksam.
• Betätigen Sie erneut die SET-Taste, um die Einstellungen zu
speichern und den Programmier-Modus wieder zu verlassen.
S
12
Bild 11
3
SET
Bild 12
23
Überprüfen der Kreiselfunktion
• Nehmen Sie den Kreisel im AVCS-Mode in Betrieb. Am Sender dürfen keine Heck-Mischer programmiert sein und der
Steuerknüppel für die Heckfunktion sowie der dazugehörige Trimmschieber müssen sich in der Mittelstellung befinden.
• Stellen Sie im Programmier-Modus am Kreisel den erforderlichen Servotyp (Analog-/Digital-Servo) ein.
• Schließen Sie das Heckservo an und befestigen Sie den Servohebel im 90°-Wiinkel zum Anlenkgestänge.
• Testen Sie die Laufrichtung für die Heck-Steuerung. Falls das Servo die verkehrte Laufrichtung aufweist, so ändern Sie am
Sender die Laufrichtung des Heckservos.
• Stellen Sie am Sender die korrekten Ausschlagswerte für das Heckservo ein. Der maximale Steuerweg am Sender muss
nutzbar sein ohne dass dabei der Servohebel bei Vollausschlag durch die Anlenkung mechanisch begrenzt wird. Am
Kreisel darf dazu der maximale Servoweg nicht begrenzt sein.
• Überprüfen Sie anschließend die Wirkrichtung des Kreisels. Wenn Sie den Hubschrauber von oben gesehen im Uhrzeigersinn um die Hauptrotorwelle drehen, muss der Kreisel das Heckservo in die gleiche Richtung auslenken, als wenn Sie am
Sender nach links gesteuert hätten. Falls das Servo die verkehrte Laufrichtung aufweist, stellen Sie im ProgrammierModus am Kreisel die korrekte Laufrichtung des Heckservos ein.
• Stellen Sie, falls erforderlich, im Programmier-Modus am Kreisel die max. Servo-Ausschläge ein.
Überprüfen der Kreiseleinstellung im Flug
• Nehmen Sie zunächst die Fernsteuerung und anschließend das Modell mit dem Kreisel in Betrieb.
• Stellen Sie eine Kreiselempfindlichkeit von 65 – 70% ein.
Achtung wichtig!
Falls Sie den Hubschrauber vom Vorbereitungsraum zur Startstelle tragen und dabei das Heckrohr in eine andere
Richtung ausrichten, ist eine erneute Initialisierung des Kreisels erforderlich.
Bewegen Sie dazu den Hecksteuerknüppel am Sender 4 x schnell hin und her. Daraufhin wird das Heckservo
wieder in die Mittelstellung laufen. Diese Tätigkeit sollte grundsätzlich vor jedem Start durchgeführt werden.
• Falls bei der Initialisierung z.B. die Trimmung verstellt war, kann die Trimmung wieder in die Mittelstellung gebracht
werden. Anschließend ist der Schieberegler für die Kreiselempfindlichkeit 3 x schnell hin und her zu bewegen wobei er
zum Schluss wieder im AVCS-Mode stehen muss. Dadurch wird die im Moment aktuelle Knüppelstellung (inkl. Trimmung)
als neue Neutralposition gespeichert.
• Lassen Sie den Rotor anlaufen und erhöhen Sie langsam die Drehzahl. Der Hubschrauber darf aber noch nicht abheben.
• Wenn das Modell anfängt „leicht“ zu werden, prüfen Sie die Funktion des Heckrotors.
• Wenn die Steuerung des Heckrotors zufriedenstellend funktioniert, lassen Sie den Hubschrauber abheben und prüfen Sie
die Kreiselwirkung.
Wenn sich das Heck ständig schnell hin und her bewegt, ist die Kreiselempfindlichkeit zu hoch eingestellt. Regeln Sie in
diesem Fall die Kreiselempfindlichkeit zurück oder verringern Sie den Abstand „A“ am Heckservohebel (siehe Bild 3).
Wenn sich das Heck bei schnellen Pitchänderungen wegdreht, ist die Kreiselempfindlichkeit zu gering. Erhöhen Sie in
diesem Fall die Kreiselempfindlichkeit oder vergrößern Sie den Abstand „A“ am Heckservohebel (siehe Bild 3).
Technische Daten
Betriebsspannung ........................................... 4,5 – 6,5 V/DC
Stromaufnahme ca. ........................................ 50 – 100 mA
Stecksystem ................................................... Futaba
Ansteuerung Analog-/Digital-Servos ................. 50/333 Hz
Servo-Mittelstellung ........................................ 1520 µs
Abmessungen................................................. 26 x 24 x 9 mm
Gewicht inkl. Anschlusskabel ........................... 12 g
24

13. Drehzahlregler „GUEC GE-610“
Bevor Sie den Drehzahlregler in Betrieb nehmen, lesen Sie die Hinweise zur Bedienung und Programmierung
sorgfältig durch.
Leistungsmerkmale
• Hochleistungs-Mikroprozessor für max. Motor-Kompatibilität und höchste Effizienz
• Max. Drehzahl 210 000 rpm (bei 2poligen Motoren), 70 000 rpm (6polig), 35 000 rpm (12polig)
• 3 Start-Modi: Normal, weich, sehr weich für Direkt- oder Getriebeantriebe
• Konfigurierbarer Gasbereich für alle auf dem Markt befindlichen Sender
• Geradlinige und schnelle Gasannahme
• Mikroprozessor mit separatem Spannungsregler für beste Störunterdrückung
• Schutzschaltung bei Unterspannung, Überhitzung und RC-Signalverlust
• Umschaltbare BEC-Spannung von 5,25 und 6 V
• Aktiver Drehzahlregler-Mode für Modellhubschrauber (Governor-Mode)
Programmierbare Einstellungen
Achtung wichtig!
Bevor Sie den Drehzahlregler in Betrieb nehmen, ist es in jedem Fall erforderlich, den Regler individuell auf das
von Ihnen eingesetzte Hubschrauber- oder Flugmodell zu programmieren.
1. Bremsfunktion: Aus / weich / hart / sehr hart (Standardeinstellung: Aus)
2. Akkutyp: Lithium (LiIo- oder LiPo-Akkus) / NiMH-Akkus (Standardeinstellung: Lithium)
3. Cutoff-Mode: Weich = schrittweise Verringerung der Ausgangsleistung / hart = sofortiges Abschalten der Ausgangsleistung (Standardeinstellung: Weich)
4. Cutoff-Schaltschwelle: Niedrig / mittel / hoch (Standardeinstellung: Mittel)
Bei Lithium-Akkus entsprechen die Werte 2,85 V / 3,15 V / 3,30 V pro Zelle.
Bei NiMH-Akkus entsprechen die Werte 50% / 62,5% / 75% der Startspannung.
5. Start-Mode: Normal / weich / sehr weich (Standardeinstellung: Sehr weich)
Die Einstellung „Normal“ wird für Flugmodelle mit Direktantrieb empfohlen.
Die Einstellungen „weich“ mit 3 s Hochlaufzeit und „sehr weich“ mit ca. 8 s Hochlaufzeit eignen sich in erster Linie für
Flugmodelle mit Getriebemotoren und Hubschraubermodelle.
Wenn nach dem Start der Motor ausgeschaltet und innerhalb von 3 Sekunden wieder Vollgas gegeben wird, schaltet
der Regler kurzfristig von „weich“ oder „sehr weich“ auf „Normal“ um, damit keine Gefahr besteht, dass das Modell
wegen der verzögerten Gasannahme Schaden nimmt.
6. Timing: 0° / 3,75° / 7,5 / 11,25° / 15° / 18,75° / 22,5° / 26,25° (Standardeinstellung: 15°)
In der Regel sind geringe Timing-Werte für die meisten Motoren ausreichend. Da es aber sehr viele unterschiedliche
Motoren auf dem Markt gibt, sollten Sie den für Ihren Motor besten Timing-Wert ermitteln. Im Regelfall bringen etwas
höhere Timing-Werte auch etwas mehr Leistung, zeitgleich steigen aber der Stromverbrauch und die thermische
Belastung von Motor, Regler und Akku.
7. Governor Mode: Aus / niedrig / hoch (Standardeinstellung: Aus)
Bei aktiviertem Governor Mode versucht der Regler die Drehzahl des Motors trotz unterschiedlicher Belastungen stets
konstant zu halten.
In der Einstellung „niedrig“ beträgt der Drehzahlbereich eines 2poligen Motors 10 000 bis 45 000 rpm. In der Einstel-
lung „hoch“ beträgt der Drehzahlbereich eines 2poligen Motors 46 000 bis 200 000 rpm.
Um die maximale Blattspitzengeschwindigkeit nicht zu überschreiten, sollten Sie in jedem Fall eine Messung der Rotor-
kopfdrehzahl durchführen. Der Governor-Modus wird erst aktiviert, wenn die Stellung des Gasknüppels über 60% liegt.
25

8. Unbenutzter Menüpunkt 1
9. Taktfrequenz: 12 kHz / 8 kHz (Standardeinstellung: 12 kHz)
Die Motoransteuerfrequenz von 8 kHz eignet sich für die meisten Brushless-Motoren. Für Motoren mit einer hohen KV-
Angabe und vielen Polen ermöglicht eine höhere Taktfrequenz einen besseren Motorlauf. Allerdings steigt dadurch
auch die thermische Belastung des Reglers.
10. BEC-Spannung: 5,25 V / 6 V (Standardeinstellung 5,25 V)
11. Unbenutzter Menüpunkt 2
12. LiPo-Zellen: Auto / 2S / 3S / 4S / 5S / 6S (Standardeinstellung: Auto)
Beim Anschließen des Akkus an den Drehzahlregler, gibt dieser entsprechend der Anzahl der erkannten Akkuzellen
mehrere Signaltöne ab. Sollten Sie ältere oder schwächere Akkus einsetzen, kann es zu Fehlern bei der automatischen
Zellenerkennung kommen. In diesem Falle empfehlen wir die manuelle Einstellung der Zellenzahl.
Inbetriebnahme
1. Stellen Sie den Gas-Steuerknüppel an Ihrer Fernsteuerung in die unterste Position (Motor aus).
2. Schließen Sie den Akku an den Drehzahlregler an. Achten Sie dabei in jedem Fall auf die richtige Polung der Anschlusskabel: Rot = Plus (+) und Schwarz = Minus (-).
Der Regler führt nun einen Selbsttest durch und gibt als Zeichen dafür, dass die angelegte Spannung im normalen
Bereich liegt, über den angeschlossenen Motor 3 kurze Töne mit steigender Tonhöhe ab.
Anschließend werden je nach Zellenzahl 2 – 6 kurze Töne ausgegeben.
Zum Schluss signalisiert ein langer Signalton den Abschluss des Selbsttests und die Betriebsbereitschaft des Reglers.
Gleichzeitig werden die Signaltöne durch das synchrone Blinken der eingebauten roten LED optisch unterstützt.
Sollte der angeschlossene Motor keine Signaltöne ausgeben, so überprüfen Sie die korrekte Verkabelung.
Sollte der Regler nach den 3 kurzen Tönen mit steigender Tonhöhe lediglich zwei kurze Töne erzeugen, so wird die
derzeitige Stellung des Gas-Steuerknüppels als Vollgasstellung erkannt. In diesem Fall bringen Sie den Steuerknüppel in die richtige Position oder betätigen für den Gaskanal die Servo-Revers-Funktion am Sender.
Wenn die rote LED 2 x pro Sekunde blinkt, ist die angeschlossene Betriebsspannung des Drehzahlreglers zu
niedrig oder zu hoch. In diesem Fall überprüfen Sie den angeschlossenen Akku.
3. Da jeder Sender leicht unterschiedliche Steuersignale aufweist, ist es erforderlich den tatsächlich vorhandenen Steuerweg im Drehzahlregler zu speichern. Die genaue Vorgehensweise ist im nachfolgenden Abschnitt „Einlernen des GasSteuerweges“ beschrieben.
Alarmtöne
Eingangsspannung außerhalb des zulässigen Bereiches:
Während des Betriebs überprüft der Drehzahlregler die Betriebsspannung. Wenn sich diese nicht im zulässigen Spannungsfenster befindet, gibt der Drehzahlsteller über den angeschlossenen Motor ein Warnsignal aus. Im Abstand von ca. 1
Sekunde ertönen zwei Signaltöne und die rote LED blinkt im selben Rhythmus.
Sendersignal wird nicht erkannt:
Wenn während des Betriebs das Sendersignal nicht erkannt wird, stoppt der Motor und gibt im Abstand von 2 Sekunden
einen kurzen Signalton ab. Die rote LED blinkt im gleichen Rhythmus. Sobald ein gültiges Sendersignal wieder erkannt wird,
schaltet der Drehzahlregler den Motor wieder ein.
Gas-Steuerknüppel in der falschen Stellung:
Falls sich der Gas-Steuerknüppel beim Einschalten nicht in der untersten Position befindet, gibt der am Drehzahlregler
angeschlossene Motor im Abstand von 0,25 Sekunden kurze Signaltöne ab und die rote LED blinkt im selben Rhythmus.
Wird der Steuerknüppel in die unterste Stellung gebracht, werden je nach Zellenzahl 2 – 6 kurze Töne ausgegeben und
anschließend die Betriebsbereitschaft mit einem langen Ton angezeigt.
26

Schutzfunktionen
Probleme beim Motorstart:
Wenn der Motor nicht innerhalb von 2 Sekunden nach dem Gasgeben anläuft, schaltet die Schutzabschaltung des Drehzahlreglers den Motor aus. Für einen erneuten Motorstart nach der Fehlerbeseitigung muss der Steuerknüppel zunächst wieder
in die unterste Stellung (Motor aus) gebracht werden.
Als mögliche Ursache für ein fehlerhaftes Hochlaufen des Motors kommen mechanische Blockaden des Motors oder des
Getriebes, sowie eine fehlerhafte Verbindung zwischen Motor und Drehzahlregler in Frage.
Überhitzungsschutz:
Falls der Drehzahlregler während des Betriebs die max. zulässige Betriebstemperatur überschreitet, wird automatisch die
Ausgangsleistung reduziert.
Sendersignal wird nicht erkannt:
Wenn während des Betriebs für mehr als 0,25 Sekunden das Sendersignal nicht erkannt wird, stoppt der Motor. Sobald ein
gültiges Sendersignal wieder erkannt wird, schaltet der Drehzahlregler den Motor wieder ein.
Einlernen des Gas-Steuerweges
1. Schalten Sie den Sender ein und überprüfen Sie an der Fernsteuerung die Einstellung des Gasweges. Dieser sollte in
beide Richtungen 100% betragen.
2. Bringen Sie den Gas-Steuerknüppel in die Vollgasstellung und schließen Sie den Akku am Drehzahlregler an.
3. Der am Regler angeschlossene Motor gibt 3 kurze Töne mit steigender Tonhöhe und nach 2 Sekunden zwei kurze Töne
ab. Die Vollgasposition wurde gespeichert.
4. Bewegen Sie unverzüglich danach den Steuerknüppel in die unterste Stellung. Der Motor gibt nun entsprechend der
Anzahl der Zellen 2 – 6 kurze Signaltöne und anschließend einen langen Signalton ab.
5. Der Drehzahlregler hat nun den tatsächlichen Steuerweg des Gas-Kanals gespeichert und ist betriebsbereit.
27

Programmieren des Drehzahlreglers
1. Programmiermodus aufrufen
• Schalten Sie den Sender ein und bewegen Sie den Gas-Steuerknüppel in die Vollgasstellung.
• Schließen Sie den Akku am Drehzahlregler an. Der am Regler angeschlossene Motor gibt 3 kurze Töne mit steigender
Tonhöhe und nach zwei Sekunden zwei kurze Töne ab.
• Nach weiteren 5 Sekunden gibt der angeschlossene Motor 5 kurze Töne mit steigender Tonhöhe ab.
• Der Regler befindet sich nun im Programmiermodus.
2. Menüpunkt aufrufen
• Im Programmiermodus hören Sie nun 14 Gruppen unterschiedlicher Signaltöne, die sich in einer Schleife ständig
wiederholen. Die rote LED blinkt im gleichen Rhythmus. Die Zuordnung der jeweiligen Signaltöne zu den Menüpunkten können Sie der nachfolgenden Tabelle entnehmen.
Nr. Tonfolge Menüpunkt bzw. Funktion
1 1 x kurz Bremsfunktion
2 2 x kurz Akkutyp
3 3 x kurz Cutoff-Mode
4 4 x kurz Cutoff-Schaltschwelle
5 1 x lang Start-Mode
6 1 x lang, 1 x kurz Timing
7 1 x lang, 2 x kurz Governor-Mode
8 1 x lang, 3 x kurz Unbenutzter Menüpunkt 1
9 1 x lang, 4 x kurz Taktfrequenz
10 2 x lang BEC-Spannung
11 2 x lang, 1 x kurz Unbenutzter Menüpunkt 2
12 2 x lang, 2 x kurz LiPo-Zellen
13 3 x lang, 1 x kurz Standardeinstellungen aufrufen
14 3 x lang, 2 x kurz Programmiermodus verlassen
• Um einen bestimmten Menüpunkt aufrufen zu können, schieben Sie den Gas-Steuerknüppel innerhalb von 3 Sekunden nach den jeweiligen Tonsignal von der Vollgasstellung in die unterste Stellung (Motor aus).
• Der Drehzahlregler wechselt dadurch in den Einstellmodus des aufgerufenen Menüpunktes.
28
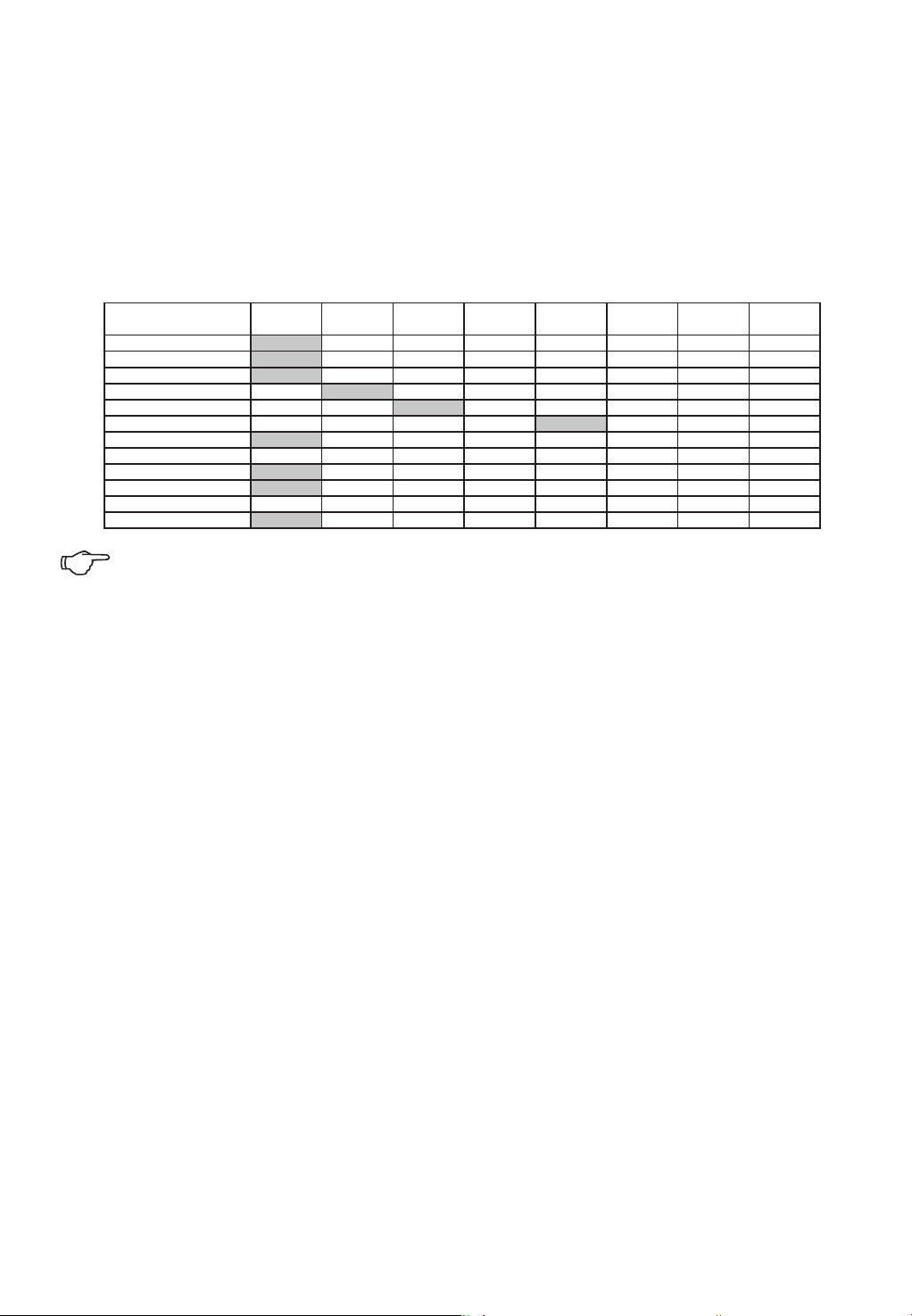
3. Werte verändern
• Im Einstellmodus hören Sie nun ebenfalls unterschiedliche Signaltöne (siehe oberste Zeile in der unten angefügten
Tabelle), die sich in einer Schleife ständig wiederholen. Die rote LED blinkt im gleichen Rhythmus. Ab wann die
Tonfolge erneut beginnt, ist vom aufgerufenen Menüpunkt abhängig, da nur die Töne dargestellt werden, die auch
einen Einstellwert hinterlegt haben.
• Wenn das Tonsignal für den gewünschten Einstellwert zu hören war, schieben Sie den Gas-Steuerknüppel unverzüglich von der untersten Stellung (Motor aus) in die Vollgasstellung.
• Als Bestätigung für den gespeicherten Wert sind 4 Töne zu hören.
• Der Drehzahlregler wechselt zurück in den Programmiermodus, wo Sie bei Bedarf den nächsten Menüpunkt aufrufen
und einstellen können.
1 x kurz 2 x kurz 3 x kurz 4 x kurz 1 x lang 1 x lang 1 x lang 1 x lang
Bremsfunktion Aus weich hart sehr hart
Akkutyp Lithium NiMH
Cutoff-Mode weich hart
Cutoff-Schaltschwelle niedrig mittel hoch
Start-Mode normal weich sehr weich
Timing 0° 3,75° 7,5° 11,25° 15° 18,75° 22,5° 26,25°
Governor-Mode Aus niedrig hoch
Unbenutzter Menüpunkt 1
Taktfrequenz 12 kHz 8 kHz
BEC-Spannung 5,25 V 6 V
Unbenutzter Menüpunkt 2
LiPo-Zellen Auto 2S 3S 4S 5S 6S
1 x kurz 2 x kurz 3 x kurz
Die Standardeinstellungen sind in der Tabelle grau hinterlegt
4. Programmiermodus verlassen
• Wenn sich der Regler im Programmiermodus befindet, warten Sie bis der Menüpunkt 14 akustisch angezeigt wird
und schieben dann den Gas-Steuerknüppel innerhalb von 3 Sekunden nach dem Tonsignal von der Vollgasstellung in
die unterste Stellung (Motor aus). Zunächst sind 5 einzelne Töne zu hören und anschließend gibt der Motor die
Tonfolge für die Inbetriebnahme ab.
• Wenn sich der Regler im Einstellmodus befindet und Sie einen Wert neu abgespeichert haben, ziehen Sie den GasSteuerknüppel unmittelbar nach der Bestätigungs-Tonfolge zurück in die unterste Stellung (Motor aus). Zunächst
sind 5 einzelne Töne zu hören und anschließend gibt der Motor die Tonfolge für die Inbetriebnahme ab.
Technische Daten
Stromversorgung ............................................ 2 – 6 LiPo-Zellen oder 5 – 18 NiMH-Zellen
Dauerstrom .................................................... 100 A
Spitzenstrom .................................................. 150 A
BEC-Ausgangsleistung..................................... 5,25 / 6 V, 4 A
Abmessungen................................................. 75 x 35 x 17 mm
Gewicht ......................................................... 82 g
29

Table of Contents
Page
1. Introduction .................................................................................................................................................. 30
2. Intended Use ................................................................................................................................................ 31
3. Product Description........................................................................................................................................ 31
4. Scope of Delivery ........................................................................................................................................... 31
5. Safety Information ......................................................................................................................................... 32
a) General Information .................................................................................................................................. 32
b) Before Commissioning ............................................................................................................................... 32
c) During Operation ...................................................................................................................................... 33
6. Notes on Batteries and Rechargeable Batteries ................................................................................................ 34
7. General Notes on Mechanics Setup ................................................................................................................. 35
8. Mechanics Setup ............................................................................................................................................ 37
9. Maintenance and Care ................................................................................................................................... 44
10. Disposal ........................................................................................................................................................ 44
a) General Information .................................................................................................................................. 44
b) Batteries and Rechargeable Batteries ......................................................................................................... 44
11. Technical Data ............................................................................................................................................... 45
12. Heading Lock Gyro “GU 211” .......................................................................................................................... 46
13. Speed Controller “GUEC GE-610” .................................................................................................................... 53
1. Introduction
Dear Customer,
Thank you for purchasing this product.
This product complies with the statutory national and European requirements.
To maintain this status and to ensure safe operation, you as the user must observe these operating instructions!
These operating instructions are part of this product. They contain important notes on commissioning and handling. Also consider this if you pass on the product to any third party.
Therefore, retain these operating instructions for reference!
All company names and product names are trademarks of their respective owners. All rights reserved.
If there are any technical questions, contact:
Germany: Tel. no.: +49 9604 / 40 88 80
Fax. no.: +49 9604 / 40 88 48
E-mail: tkb@conrad.de
Mon. to Thur. 8.00am to 4.30pm
Fri. 8.00am to 2.00pm
30

2. Intended Use
This product is an electrically powered model helicopter designed for private use in the model construction area and the
connected operating times. Control of the model requires a remote control system suitable for a model helicopter (not
included).
Any use other than the one described above may damage the product. Moreover, it would involve dangers such as short
circuit, fire, electric shock, etc. Observe the safety information under all circumstances!
The product must not become damp or wet.
The product is not suitable for children under 14 years of age.
Observe all safety information in these operating instructions. They contain important information on handling of
the product.
You alone are responsible for the safe operation of the model!
3. Product Description
The model helicopter is delivered in components as a construction set and contains everything needed to assemble the
mechanics. Depending on design, the model helicopter mechanics may also include other components like drive motor,
controller, servos and gyros.
Assembly of the mechanics and installation of the required drive and remote control components must be performed by the
user. Therefore, this model requires comprehensive and well-founded know-how in using model helicopters for completion
and subsequent operation.
This model helicopter is not suitable for children and model construction newcomers!
4. Scope of Delivery
• Helicopter mechanics
• Manufacturer’s manual with assembly sketches
• Assembly instructions
31

5. Safety Information
In case of damage caused by non-compliance with these operating instructions, the warranty/
guarantee will expire. We do not assume any liability for consequential damage!
We do not assume any liability for damage to property or personal injury caused by improper use or
the failure to observe the safety instructions! In such cases the warranty/guarantee will expire.
Normal wear and tear during operation (e.g. worn-out gear wheels or servo transmission) are excluded from the
guarantee and warrantee, the same applies to accidental damage (e.g. broken bearing retainer or rotor blades).
Dear customer, these safety instructions are not only for the protection of the product but also for your own safety
and that of other people. Therefore, read this chapter very carefully before taking the product into operation!
a) General Information
Caution, important note!
Operating the model may cause damage to property and/or individuals. Therefore, make sure that you are
sufficiently insured when using the model, e.g. by taking out private liability insurance. If you already have private
liability insurance, verify whether or not operation of the model is covered by your insurance before commissioning
your model.
Note: In some EU countries, you are required to have insurance for any flying models!
• The unauthorized conversion and/or modification of the product is prohibited for safety and approval reasons (CE).
• This product is not a toy and not suitable for children under 14 years of age.
• The product must not become damp or wet.
• If you do not have sufficient knowledge yet of how to operate remote-controlled models, please contact an experienced
model sportsman or a model construction club.
• Do not leave packaging material unattended. It may become a dangerous toy for children.
b) Before Commissioning
• Strictly comply with the order indicated by the manufacturer for commissioning of the remote control system. Usually, the
transmitter must be connected to the speed controller first, and then the helicopter’s flight battery.
If the model is not operated with a 2.4 GHz remove control system, observe that no other transmitter must be operated
at the same remote control channel at the same time.
• Check the functional reliability of your model and of the remote control system. Watch out for any visible damage such as
defective plug connections or damaged cables. All moving parts of the model must run smoothly but should not have any
play in their bearings.
• Charge the flight battery, which is necessary for operation, as well as the rechargeable battery that may be inserted in the
remote control according the manufacturer’s instructions.
• Before operation, always control the trim settings of the on the transmitter for the various steering directions and, if
necessary, adjust them.
• Select an appropriate site for the operation of your model helicopter.
• Before every commissioning, perform a range check for your remote control system according to manufacturer informa-
tion.
32

c) During Operation
• Do not take any risks when operating the product! Your own safety and that of your environment depends completely on
your responsible use of the model.
• Improper operation can cause serious damage to people and property! Therefore make sure to keep a sufficiently safe
distance to persons, animals or objects during operation.
• Do not direct your model towards spectators or towards yourself.
• Fly your model only if your ability to respond is unrestricted. The influence of tiredness, alcohol or medication can cause
incorrect responses.
• The motor, speed controller and flight battery can heat during operation. Therefore, take a break of 5 to 10 minutes before
re-charging the flight battery or before flying with a possibly available spare flight battery.
• Never switch off the remote control (transmitter) while the model is in use. After landing, always disconnect the flight
battery from the speed controller first. It is only after this that the remote control may be turned off.
• Never switch off the transmitter during operation before disconnecting the flight battery from the speed controller.
• In case of a defect or a malfunction, remove the problem before using the model again.
• Never expose your model or the remote control to direct sunlight or excessive heat for an extended period of time.
33

6. Notes on Batteries and Rechargeable Batteries
Despite the fact that handling batteries and rechargeable batteries in daily life nowadays is a matter of fact, there are still
numerous dangers and problems involved. For LiPo/Lion rechargeable batteries in particular, various regulations must be
observed under any circumstances due to their high energy content (in comparison to conventional NiCd or NiMH rechargeable batteries), because otherwise there is danger of explosion and fire.
Make sure to observe the following information and safety information when handling batteries or rechargeable batteries.
• Keep batteries/rechargeable batteries out of the reach of children.
• Do not leave any batteries/rechargeable batteries lying around openly. There is a risk of batteries being swallowed by
children or pets. If swallowed, consult a doctor immediately!
• Batteries/rechargeable batteries must never be short-circuited, disassembled or thrown into fire. There is a danger of
explosion!
• Leaking or damaged batteries/rechargeable batteries can cause chemical burns to skin at contact; therefore, use suitable
protective gloves.
• Do not recharge normal batteries. There is a risk of fire and explosion! Only charge rechargeable batteries intended for
this purpose. Use suitable battery chargers. Batteries (1.5V) are meant to be used once only and must be properly
disposed of when empty.
• When inserting batteries/rechargeable batteries or when connecting a battery pack or a charger, observe the correct
polarity (note plus/+ and minus/-). Wrong polarity may not only damage the transmitter, flight model and the rechargeable batteries. There is a risk of fire and explosion.
• Always replace the entire set of batteries or rechargeable batteries. Never mix fully charged batteries/rechargeable
batteries with partially discharged ones. Always use batteries or rechargeable batteries of the same type and manufacturer.
• Never mix batteries and rechargeable batteries! Either use batteries or rechargeable batteries.
• If the device is not used for an extended period of time (e.g. storage), remove the inserted batteries (or rechargeable
batteries) from the remote control to avoid damage from leaking batteries/rechargeable batteries.
Attention!
After the flight, the flight battery must be disconnected from the helicopter. Do not leave the rechargeable flight
battery connected to the helicopter if the latter is not used (e.g. during transport or storage). Otherwise, the flight
battery may be fully discharged and is thus destroyed/unusable!
• Recharge the rechargeable batteries about every 3 months. Otherwise, so-called deep discharge may result, rendering
the rechargeable batteries useless.
• Never charge the enclosed flight battery immediately after use. Always leave the flight rechargeable battery to cool off
first (at least 5-10 minutes).
Only charge intact and undamaged batteries. If the external insulation of the rechargeable battery is damaged or if the
rechargeable battery is deformed or bloated, it must not be charged. In this case, there is immediate danger of fire and
explosion!
• Never damage the flight battery covering, do not cut the foil cover, do not probe the rechargeable battery with sharp
objects. There is a risk of fire and explosion!
• Remove the flight battery that is to be charged from the model and place it on a fire-proof support. Keep a distance to
flammable objects.
• Always charge rechargeable batteries at the current indicated by the manufacturer and observe that the permissible
maximum values are not exceeded.
• As the charger as well as the flight battery heat up during the charging process, it is necessary to ensure sufficient
ventilation. Never cover the charger or the flight battery! Of course, this also applies for all other chargers and rechargeable batteries.
• Never leave batteries unattended while charging them.
• Disconnect the flight battery from the charger when the rechargeable battery is fully charged.
• Charges and rechargeable batteries must not get damp or wet. The charger and the flight battery must not become damp
or wet!
34

7. General Notes on Mechanics Setup
Before starting to set up the mechanics, gather information on some important notes:
• Every model helicopter is only as good as its assembly. Therefore, assemble it carefully and precisely according to
instructions. Incorrectly or wrongly assembled model helicopters will not only fly much worse, they also pose a considerable safety risk.
• Comply with the assembly sketches in the manufacturer’s handbook precisely for assembly. Also observe that some
components must be fastened with special threadlocker varnish (not included). The different assembly sketches use the
following symbols for this (also see manufacturer’s manual, page 6).
Screw connection with threadlocker varnish L
L
Screw connection* with threadlocker varnish L
L
Screw connection with threadlocker varnish T
T
Screw connection* with threadlocker varnish T
T
Application of threadlocker varnish T
T
Application of instant glue
CA
Application of lubricant
Observe correct performance of each assembly section
!
Specifically observe correct performance of the assembly section
!
Correct compliance with the notes in the assembly sketches is of the utmost importance for function and
operational safety of the model.
!
* Because the operational safety of the model depends on these screw connections, pay special attention to firm connec-
tion/screw connection of the components without overloading the screw material or component.
As threadlocker varnish “L”, you can use “Loctite 221” with low hardness; as threadlocker varnish “T”, you can use “Loctite
243” with medium hardness.
In practice, however, it has proven sensible to use medium-hard threadlocker varnish for all screw connections to be
secured. To be able to loosen the screws again for servicing, we advise against using threadlocker varnish with high
hardness.
35

• Open the respective packaging bag only when the components are actually needed for the respective assembly section.
For this, place the individual components in a separate component holder (empty freezer box, etc.).
• Only perform the individual assembly steps after you have understood all the pending activities and know precisely which
component must be attached where.
• The included screws have different lengths and heads. Ensure that you install the right screws in the right places. In
doubt, place the screws against the 1:1 scale sketches at the upper left of the images to verify that you have chosen the
correct screw.
• Only use the material included with the construction set. Do not try to modify the model with additional and unsuitable
assembly material. In case of defect, replace the parts and components concerned only with genuine parts from the spare
parts list.
• Use high-quality assembly tools like a hexagon wrench with precisely ground and hardened screw drives. Cheap tools
tend to overturn and damages the screw heads.
• Only assemble the model helicopter on a suitable basis (soft cotton cloth, etc.) to protect the mechanics from scratches
and damage.
36

8. Mechanics Setup
Take the manufacturer’s manual with the assembly sketches and start assembly of your model helicopter according to the
drawings starting on page 7.
Page 7
Upper figure:
First install the holder for the tail boom (# B), then screw the two chassis plates on according to the drawing. Please observe
that the two chassis plates are different and the screws have different lengths. Use threadlocker varnish for every screw
connection.
The two M3x18 screws are tightened firmly only after installation of the tailboom (see page 13, lower figure).
Lower figure:
Install the landing gear according to the figure. The landing struts must be aligned towards the front in flight direction (also
see page 9). Use three chassis plate connectors with a vertical bore without a thread for the screws M3x16 and the screw
M3x10.
The two screws M3x16 and screw M3x10 are only tightened after attachment, alignment and screwing of the chassis to the
landing gear (see next figure).
Page 8
Upper figure:
Place the chassis on the landing gear and screw on the unit. Use threadlocker varnish for every screw connection. The
chassis plate connectors in the front and rear areas must have a thread for the M3x6 countersunk screws. The front and rear
chassis plate must be turned so that the countersunk screws are flush with the surface.
Lower figure:
Insert the main gear and the spacer disc 8x13x2 in the mechanics and push the rotor shaft into the mechanics from above.
The bore with the lower distance to the shaft end must point down towards the main gear.
After connecting the rotor shaft to the main gear with the screw M3x16, push the collar onto the rotor shaft from above.
Secure the collar with two grub screws M3x3. The rotor shaft must not have any vertical play in the mechanics.
Page 9
Upper figure:
Use the screws M2,6x10 to install the three swash plate servos and the tail servo in the intended positions according to
figures 1 to 3.
Important!
If your helicopter model was delivered with the servos, observe the precise type designation of the servos. For the
swash plate, three servos of the same type (e.g. GS 501) must be used, whereas the tail control requires a faster
servo (e.g. GS 502). The chassis has slots for clean cable placement through which cable ties can be pulled.
Lower figure:
The tail gyro can be installed above the tailboom attachment. The receiver can be installed in the rear area of the chassis
floor plate, the speed controller in the front area.
37

Page 10
Upper figure:
Put the motor carrier on the motor and tighten the four screw (2 x M3x6 and 2x M3x10) so that the motor can still be pushed
back and forth on the carrier. Then install the motor pinion on the motor shaft and fasten the pinion with two grub screws
M3x3. The pinion position on the motor shaft must be selected so that it does not protrude over the main pinion at the top
or bottom later.
Lower figure:
Insert the motor in the chasses according to the sketch and screw the motor carrier to the chassis with six M3x6 screws. Use
two cylinder-head screws on either side and two countersunk screws on the top.
To set the tooth backlash, push a narrow paper strip between the motor pinion and the gear pinion, push the motor towards
the gear and screw the motor to the motor carrier from below. Then remove the paper strip again.
If set correctly, the two pinions will securely interlock without catching or without showing too much play.
Practical advice:
Since it is not possible to reach all four motor attachment screws when the motor is installed, it is practical to only
fasten the motor carrier with the motor in the mechanics as first.
After setting tooth backlash, it is sufficient to fasten the motor using the screws that are accessible from the
bottom. Then the motor carrier and motor can be removed again and all four motor screws can be tightened.
Finally, the motor carrier can be placed in the mechanics again and screwed on tightly.
The motor connection lines are guided downwards to the speed controller on the chassis outside and connected there.
Page 11
Upper figure:
First push the swash plate and the central piece with the two pitch compensation levers onto the rotor shaft as shown in the
figure. Connect the pitch compensator levers to the swash plate and then attach the rotor head. The central paddle rod
piece is already pre-assembled in the factory. The linkage balls “A” must be attached in the outer thread bores.
The rotor head was built with soft buffer rubbers (black) ex works. For harder rotor head reconciliation, the rotor
head includes red buffer rubbers.
Lower figure:
Create the two paddle rocker linkage rods according to the drawing at the lower left of the figure. After assembly of the
paddle rocker (also see page 12, top figure), align the paddle rod so that it protrudes evenly on either side of the rocker (see
sketch at the bottom of the picture)
Page 12
Upper figure:
Turn the paddles onto the paddle rod and align the paddles precisely. The paddles only need to have a distance of 135 mm
to the rocker (see sketch below the drawing) and must be aligned horizontally to the paddle rocker (see sketch at the left
top).
Lower figure:
Slide the drive belt for the tail rotor into the tailboom and assemble the tail rotor casing with the tail rotor shaft according
to the figure.
Important!
Always observe the different screw lengths.
38

Page 13
Upper figure:
The pre-assembled tail rotor is pushed onto the tail rotor shaft with the sliding sleeve according to the sketch and attached
with two grub screws M3x3.
Observe that the two grub screws catch in the respective outer indentations of the tail rotor shaft.
Verify the function of the tail rotor linkage after completion of the tail rotor unit. All components must work smoothly but
must not have any play in their bearings.
Important!
Tighten the screws for the tail rotor blades only enough for the rotor blades to still cleanly align at a 180° to each
other in flight.
Lower figure:
Push the tailboom carefully back into the mechanics. Observe that the derive belt is turned according to the upper sketch.
After placing the belt on the front drive wheel, draw back the tailboom again. Observe correct belt tension. Tension the belt
only enough for the entire tail rotor drive to still work smoothly.
When the tailboom fits perfectly and the rudder unit is aligned vertically, tighten the two chassis screws M3x18 (see page
7 top figure) and the screws at the tow tailboom supports. Connect the tail rotor rods to the tail rotor servo (also see page
17, lower figure).
Page 14
Upper figure:
Install the rotor head and swash plate linkage rod according to the respective sketches and insert the rods.
Important note!
Since high-performance electrical drives can be very dangerous, we recommend disconnecting the motor from the
controller for any maintenance and setting work. This reliably prevents inadvertent start-up of the mechanics.
After installing the servo levers, call a helicopter programme with a 3-point 120° swash disc control (HR-3) in your remote
control transmitter.
Set the correct running direction and the precise centre position of the servos. The three servo levers of the swash plate
sensors must be aligned precisely in a horizontal line with each other (see small sketch) when the pitch control lever is in the
centre position.
Lower figure:
Assembly of the swash plate guide and the rotor blades complete the mechanics setup. When installing the swash plate
guide, ensure that the side with the lower height of the guide slot is installed pointing to the front in flight direction.
The rotor blade screws must only be tightened enough for the rotor blades to align at a 180° angle to each other in flight.
39

Page 15
Verification of the control directions:
Upper figure:
The figure shows the height control of the model helicopter, with the respective lever motions in remove control systems for
mode I and mode II displayed.
If the angle of attack of the rotor blades is to be increased for lifting, the swash plate must be pushed upwards on the main
rotor shaft by the servos. Observe that the swash plate always remains horizontal and never tilts to the side during its
vertical movements.
Centre figure:
The figure shows the directional control of the model helicopter. The swash plate always has to tilt in the direction into which
the steering command is given. Observe that the swash plate has the same inclination angles to the right and left. The
inclination angles to the front and rear also need to match.
Lower figure:
The figure shows the tail control of the model helicopter. If the remote control steers to the right, the sliding sleeve of the
tail rotor linkage must be pushed towards the gear casing on the tail rotor shaft. If this is not the case, change the running
direction of the tail servo at the transmitter.
Also check the effective direction of the gyro in this context. If the fuselage tip of the helicopter is turned to counterclockwise to the left when viewed from above, the sliding sleeve must also be moved towards the gear casing by the gyro.
If this is not the case, change the running direction of the tail servo at the gyro. Then adjust the maximum deflection of the
tail servo at the gyro.
Page 16
Upper figure:
The figure shows a throttle and a pitch curve schematic for normal flight and freestyle/aggressive flight.
Please consider these values merely reference points for your personal settings that you need to determine in practical
flight.
Lower figure:
Before measuring the angles of attack for the blades with a pitch scales, check that the swash plate, the pitch compensation
levers and the blade holder linkage levers are aligned parallel with each other. The angle of attach of the rotor blades must
be 0°.
If you move the control lever for the pitch function (in normal flight) all the way down, you should be able to measure an
angle of attach of -2 to -3 ° at the rotor blades. If the control lever is moved all the way to the top, the rotor blades should
achieve an angle of attack of 13°. The maximum negative pitch angle (for freestyle flight) is -13°.
The collective pitch angle is max. +/- 13° and the cyclic pitch angle 10°.
40

Page 17
Inspections before the start
Upper figure:
Before taking the model into operation, check the following items:
1. Check all screw connections for tight fit.
2. Check the tooth backlash between the motor pinion and the main pinion. The pinions must interlock securely but the
gear should still run smoothly.
3. Check the tail rotor drive. All mechanics components of the tail rotor drive must work reliably and smoothly.
4. Check the correct and secure fit of the electronics components and the drive battery. Observe the required distance
between the drive battery and the electrical motor. It should be 5 to 10 mm.
5. Observe a firm fit of the drive battery. Use self-adhesive hook and loop tape in addition to the battery attachment loops.
The hook part of the hook and loop tape is glued to the battery support, the loop part to the battery.
6. Check that the rotor blades are balanced correctly. During the first flights, also observe correct tracking and adjust if
required.
7. Check all shafts and ball bearings for easy and correct run.
8. Check all cables. Especially observe the connections between the speed controller and the motor.
Lower figure:
9. Check the positions of the tail servo and the tail rotor. In the basic position, the servo lever must be at a 90° angle to
the linkage (see figure 1-4). The linkage rod of the tail rotor slider sleeve then also has to be at a 90° angle to the tail
rotor shaft (see figure 1-5).
10. Check the tail rotor linkage for smooth running (figures 1-6 and 1-7).
11. After switching on the transmitter and connecting the flight battery, check the correct motion direction of the swash
plate servo and the tail rotor. If you turn the helicopter around the rotor shaft counter-clockwise, the gyro has to move
the slider sleeve of the tail rotor linkage towards the gear casing.
Page 18
Verify after every flight
Check the following items right before any flight:
1. Check all screw connections for firm fit (also see page 16).
2. Check the tooth backlash between the motor pinion and the main pinion. Pay special attention to excessive wear or
defective teeth.
3. Check the drive gear of the tail rotor (also see page 16).
4. Check the correct and secure fit of the electronics components (also see page 16).
5. Check all shafts and ball bearings for easy and correct run (also see page 16).
6. Check the temperature of motor, battery and speed controller.
Important!
Let the motor and speed controller cool off to ambience temperature before starting again with a charged spare
flight battery.
41

Thorough maintenance
1. Check if any screws have loosened or components are no longer firmly screwed on.
2. Check the tooth backlash between the motor pinion and the main pinion. Particularly check if the motor has come loose
so that the teeth of the two pinions no longer interlock cleanly.
3. Check the tooth backlash at the tail rotor drive. The pinions must force-interlock but still run smoothly.
4. Observe clean run of the various shafts. Even slight ground contact of the rotor blades may lead to considerable shaft
deformation.
5. Check all ball bearings for clean run. Bearings that issue a “rolling” or “crunching” feel when operated manually must
be replaced as well as any visibly damaged ball bearings.
6. Check the auxiliary paddles. The paddles always have to be aligned precisely (see page 12, top figure), and the paddle
rod must not be deformed.
Page 19
Upper figure:
The figure shows disassembly of the main rotor shaft. The individual work steps are marked with numbers in the drawing.
1. Remove the screws of the swash plate guide #208876 and remove the swash plate guide.
2. Disconnect the three linkage rods for the swash plate #208401 from the servo levers.
3. Remove the rotor shaft screw #208864 from the main gear.
4. Loosen the grub screws #208865 at the rotor shaft collar.
5. Pull the rotor shaft and the rotor head from the mechanics upwards.
6. Remove the rotor head screw #208864 and remove the rotor head from the shaft.
Lower figure:
The figure shows disassembly of the main gear. The individual work steps are marked with numbers in the drawing.
1. Remove the main rotor shaft first (see top).
2. Remove the collar #208368 at the bottom of the main gear.
3. Remove the three screws #208855 and remove the centre piece #208360.
4. Remove the spacer disc #208883.
5. After removing the screws #208858, the bottom piece #208358 and the freewheel can be removed.
Attention!
To insert the freewheel again correctly alter, we recommend marking the lower side with a fibre pen. For assembly,
the centre piece #208360 must be oiled according to the drawing.
42

Page 20
Upper figure:
The figure shows the schematic setup of the rotor head. The rubber rings #208902 (75°) or #208912 (90°) can be used to
influence the rotor head buffering (soft or stiff). The individual work steps for disassembly are marked with numbers in the
drawing.
Important!
Observe that the inner bearing disc of the axial ball bearing in the main rotor blade holder has a large bore (see
top right sketch).
Lower figure:
The figure shows the schematic setup of the rotor head. The individual work steps for disassembly are marked with
numbers in the drawing.
Page 21 - 29
Pages 21 to 28 show the explosion drawings of the individual assemblies with the associated spare parts designations and
spare parts numbers.
Attention!
Please observe that the 6-digit numbers in the manufacturer’s manual are no Conrad order numbers!
For the current list of spare parts with the corresponding Conrad Electronic order numbers, see www.conrad.com
in the download area of the respective model helicopters.
43

9. Maintenance and Care
To warrant operational safety of your model helicopter, regular inspections and maintenance is required (see manufacturer
manual/assembly instructions pages 17 and 18).
Important!
If you have to replace any damaged or worn parts, only use genuine replacement parts in your helicopter.
The spare parts list is located on the website www.conrad.com in the download section for the respective device.
Alternatively, you may also request the spare parts list on the phone. For the contact data, please refer to the top of these
instructions in the chapter “Introduction”.
10. Disposal
a) General Information
At the end of its service life, dispose of the product according to the relevant statutory regulations.
b) Batteries and Rechargeable Batteries
You as the end user are required by law (Battery Ordinance) to return all used batteries/rechargeable batteries. Disposing
of them in the household waste is prohibited!
Batteries and rechargeable batteries containing hazardous substances are marked with adjacent symbol to indi-
You may return used batteries/rechargeable batteries free of charge at the official collection points of your community, in
our stores, or wherever batteries/rechargeable batteries are sold.
You thus fulfil your statutory obligations and contribute to the protection of the environment.
cate that disposal in the household waste is prohibited. The descriptions for the respective heavy metal are:
Cd=cadmium, Hg=mercury, Pb=lead (the names are indicated on the battery/rechargeable battery e.g. below the
rubbish bin symbol shown to the left).
44

11. Technical Data
Fuselage length incl. cabin hood ...................... 1,020 mm
Main rotor diameter ........................................ 1,120 mm
Main rotor blade length ................................... 500 – 550 mm
Height............................................................ 343 mm
Width............................................................. 165 mm
Tail rotor diameter .......................................... 230 mm
Tail rotor blade length ..................................... 82 mm
Weight without flight battery ........................... 1,850 g
Recommended electric motor .......................... 1820 W, 910 KV
Recommended speed controller ....................... 100 A
Digital-Servo “GU-501”
Dimensions .................................................... 40.0 x 19.5 x 36.5 mm
Weight ........................................................... 58.5 g
Controlling time 4.8 / 6 V ................................ 0.16 / 0.13 s
Controlling torque 4.8 / 6 V ............................. 8.0 / 9.5 kg/cm
Retention torque 4.8 / 6 V............................... 16.0 / 19.0 kg/cm
Gear .............................................................. Partial metal gear
Bearing .......................................................... Double ball-bearing
Digital-Servo “GU-502”
Dimensions .................................................... 40.0 x 19.5 x 36.5 mm
Weight ........................................................... 58.5 g
Adjustment time 4.8 / 6 V ............................... 0.07 / 0.06 s
Controlling torque 4.8 / 6 V ............................. 4.0 / 4.5 kg/cm
Retention torque 4.8 / 6 V............................... 8.0 / 9.0 kg/cm
Gear .............................................................. Partial metal gear
Bearing .......................................................... Double ball-bearing
45

12. Heading Lock Gyro “GU 211”
Product Description:
This gyro is a compact stabilising system that detects position changes with an MEMS sensor. Integrated electronics control
a subsequent servo to counter position changes. Due to the compact construction and the low weight, this system is also
ideal for smaller model helicopters with electric drive.
The gyro can be operated in normal mode or AVCS mode (Angular Vector Control System).
In normal mode, correction of the subsequent servo is only performed as long as the model’s rotary motion is also recognised
by the gyro.
In the AVCS mode (Head Lock-Modus), the subsequent servo is only corrected until the original position (angle) of the gyro
is reached again.
The gyro effect can be set and adjusted or switched via the transmitter.
Performance characteristics:
• MEMS- (Micro Electro Mechanical System) rotting rate sensor and (Angular Vector Control System) mode
• Integrated temperature compensation
• Normal and heading hold (AVCS) mode with external sensitivity setting
• Digital signal processing
• Programming via the “SET” button
• Suitable for analogue and digital servos
Caution, important!
The gyro is not compatible with the servos Futaba S9251, S9256, BLS251 and JR-2700G, 8700G, 810G.
If you want to operate the gyro with an analogue servo, connect the servo only after switched it to analogue
servos in programming mode. If you do not perform the change and the gyro is set to digital servos, there is a
great danger of quickly destroying the analogue servo.
Connections and Accessories
Attention, important!
Do not launch your gyro before you have read the following sections in full and know what must be observed
during installation and operation. This is the only way to prevent malfunction or even damage.
The gyro is connected to the receiving output for the tail servo. The tail servo in turn is connected directly to the gyro
system. This means that the gyro is switched between the receiver and the tail servo. Additionally, the gyro is connected to
another receiver output that is later used for sensitivity control.
1. Gyro
2. Receiver connection for gyro sensitivity
3. Receiver connection for the tail servo
4. Connection plug for the tail servo
5. Two double-sided adhesive tapes
6. Metal plate
5 5
3
4
1
6
QUEC
GU-211
1
S
2
GAUI
GYRO
3
SET
2
Figure 1
46

Installation of the Gyro
When installing the gyro, make sure to select a place of installation where the gyro is well-protected from vibrations and heat
fluctuations.
In many cases, the manufacturers of the respective model helicopter indicate the precise installation site for the gyro.
If this is not the case for your model, select an installation site
close to the main rotor shaft.
The installation platform where you fit the gyro must be in a 90
degree angle to the main rotor shaft.
Only use the supplied double-sided adhesive foam pad (see
sketch A) for attachment.
The stabilisation axle of the gyro runs in parallel to the main rotor
shaft if installed correctly.
Caution:
If the helicopter turns sideways in mid-flight, this may be due to mechanical vibrations. For high-frequency
vibrations, it may be helpful to use both foam adhesive pads and to glue the metal plate in between (see figure 2,
sketch B).
The cables connected to the gyro must be placed so that they cannot transmit any mechanical vibrations to the
gyro and so that they cannot get into any rotating parts of the mechanics or be worn through at sharp edges.
Tail Servo Installation
The tail servo (7) installation and the setting of the tail rotor is
usually precisely indicated in the model helicopter’s documents.
Attention, important!
To achieve the best gyro effect, the servo lever (8) and
the linkage rods (9) must be at a 90° angle to each
other (neutral position).
The distance (A) is according to model size and usually indicated
in the model helicopter’s documents.
If you have no information on this, use the following values:
For standard servos: 12 – 17 mm
For mini-/micro-servos: 8 – 15 mm
Always observe perfectly smooth and play-free linkage of the tail rotor.
A
1
B
5
Figure 2
Figure 3
47

Connecting the Gyro
Connect the gyro to the receiver output for the tail servo with the
3-pin connection cable (3).
Black = minus
Red = plus
White = Impulse
Connect the 1-pin control input (yellow = impulse line) of the
gyro (2) to a free channel of the receiver that is controlled with a
slider at the transmitter.
The connections on the receiver that have to be assigned depend on the manufacturer of the remote control and can be read up in the documents on the respective remote control.
The tail rotor servo (7) is connected directly to the connection
plug for the tail servo (4). Ensure correct polarity of the servo
plug (8).
8
7
3
4
SERVO
1
QUEC
GU-211
1
3
S
2
GAUI
GYRO
SET
2
Figure 4
Launching the Gyro
Before taking the gyro into operation, all tail mixing programmes programmed in the transmitter, such as revolution mix or
gyro fadeout mix, must be deactivated.
The gyro has no function switch of its own. The power supply is provided via the 3-pin plug connection which is connected
to the receiver. Once the receiving system is switched on, the gyro is in operation.
The steering lever for the tail function and the associated trim lever must always be in their centre positions before you
operate the receiver system and thus also the gyro. The tail rotor should then be aligned so that the helicopter has no
tendency to turn to the side (factory settings) in hovering flight.
Gyro Initialisation
The gyro must be initialised for correct function. This internal
coordination is carried out automatically after switching on the
receiving system and lasts approx. 2 - 3 seconds. During this time
the model and the gyro must not be moved or turned.
To indicate initialisation, the LED S is lit orange first and then red
(normal mode) or green (AVCS mode), depending on the operating mode selected. The LEDs 1- 3 light up red first, then green,
then they go out.
Attention!
Since the gyro only works properly if it is initialised in
AVCS mode, the slider for gyro sensitivity must be set to
AVCS mode (heading hold) before initialisation.
S
12
3
SET
Figure 5
48

LED Status Displays
The LED displays other gyro conditions in addition to initialisation.
The LED S is lit green
The gyro is in AVCS mode. The tail control lever is not deflected.
The LED S flashes green in twos
The gyro is in AVCS mode. The tail control lever is deflected or the trimming was adjusted.
The LED S is lit red
The gyro is in normal mode. The tail control lever is not deflected.
The LED S flashes red in twos
The gyro is in normal mode. The tail control lever is deflected or the trimming was adjusted.
The LED S continually flashes slowly in orange
The gyro no longer receives any valid receiver signal.
The LED S continually flashes slowly in orange and LEDs 1 -3 are lit green
The gyro could not perform initialisation due to a missing receiver signal.
Setting the Operating Mode AVCS/Normal and Gyro Sensitivity
The operating mode and gyro sensitivity of 0 – 100% can be best set at the transmitter when using a slider (encoder).
A sensitivity setting of 0% means that the stabilising effect of the gyro is deactivated; 100% means that the highest gyro
sensitivity is reached. In this case, even very small direction changes of the gyro are sufficient to cause large correction
deflections at the connected servo.
The slider (encoder) at the transmitter not only sets the gyro
sensitivity, but also switches the operating mode. Therefore, the
centre position of the slider (50% encoder path) corresponds to a
gyro sensitivity to 0%.
Depending on control direction at the encoder, gyro sensitivity is
increased in normal or AVCS mode.
The two slider end positions (0% or100% encoder path) then
always correspond to the maximum gyro sensitivity of 100%.
For an encoder position of 0 – 50%, the gyro is acting in normal
mode (the LED S is lit red) and for an encoder position of 50 100%, the gyro is acting in AVCS mode (the LED S is lit green).
The slider can also be replaced by a rocker switch for switching
operating modes. In this case, the adjustment values required
must be programmed in the transmitter’s ATV menu (path setting
of the control encoders).
In connection with a flight condition switch, this makes it possible to programme separate gyro sensitivities for hover flight,
round flight and freestyle flight.
100%
50%
0%
LINEAR
100%
50%
0%
100%
50%
AVCS-Modus
0%
50%
Normal-Modus
100%
Figure 6
49

Programming the Gyro
The gyro is programmed with the SET button and the tail control lever of the transmitter. Do not leave too long of a break
between the individual programming steps; otherwise, the gyro will react incorrectly. In this case, switch off the gyro’s
power supply and take it into operation again after a few seconds.
• For this, take the gyro into operation in AVCS mode so that the
LED S lights up green.
• Keep the Set button pressed for approx. 3 seconds with a small
screwdriver.
• Release the SET button when LED 1 is lit.
• LED S changes colour from green to orange to indicate pro-
gramming mode
S
1
3
2
SET
3 sec.
Figure 7
Servo Type Selection
• Use the tail control lever to switch the light colour of LED 1 and
to thus select the required servo type.
Green = digital servo
Red = analogue servo
S
12
3
SET
Changing the Rotating Direction of the Tail Servo
• Press button SET again.
• LED 1 goes out and LED 2 lights up.
• Use the tail control lever to switch the light colour of LED 2 and
to thus select the servo direction.
Green = normal direction
Red = reverse direction
50
S
12
Figure 8
3
SET
Figure 9

Setting the Maximum Servo Deflection
• Press button SET again.
• LED 2 goes out and LED 3 lights up green. At the same time,
the tail server lever on one side moves to the end stop.
• Now you can set the maximum servo deflection on this side
with the tail control lever.
Depending on the direction in which the tail control lever is
deflected, the servo deflection increases or reduces.
• Press button SET again.
• LED 3 is now lit red and the servo lever on the other side moves
to the end stop.
• Now you can set the maximum servo deflection on this side
with the tail control lever as well.
S
S
12
12
3
3
SET
Figure 10
SET
• Press button SET again.
• All four LEDs are lit red to show that the values set can now be
stored. If the power supply is now interrupted, all previously
made settings are rendered ineffective.
• Confirm with the SET button again to store the settings and to
leave programming mode again.
S
12
Figure 11
3
SET
Figure 12
51

Verification of the Gyro Function
• Take the gyro into operation in AVCS mode. No tail mixers may be programmed at the transmitter and the control lever for
the tail function and the associated trim slider must be in the centre positions.
• Set the required servo type (analogue/digital servo) at the gyro in the programming mode.
• Connect the tail servo and attach the servo lever at a 90° angle to the linkage rods.
• Test the running direction for the tail control. If the servo runs in the wrong direction, change the tails servo running
direction at the transmitter.
• Set the correct deflection values at the transmitter for the tail servo. The maximum control path at the transmitter must
be available without causing mechanical stop of the servo lever by the linkage in case of full deflection. The maximum
servo path at the gyro must not be limited.
• Then check the effective direction of the gyro. Turning the helicopter counterclockwise around the main rotor shaft when
viewed from above, the gyro must deflect the tail servo in the same direction as if you had steered to the left at the
transmitter. If the servo runs in the wrong direction, set the correct tail servo running direction and the gyro in programming mode.
• If required, set the max. servo deflections at the gyro in programming mode.
Checking the Gyro Function in Flight
• First start the remote control, then the model with the gyro.
• Set gyro sensitivity to 65 – 70%.
Attention, important!
If you carry the helicopter from the preparation room to the starting site and align the tailboom in a different
direction, in the process, you have to initialise the gyro again.
For this, move the tail control lever at the transmitter back and forth quickly 4 x. Then the tail servo will return to
the middle position. This should generally be done before any start.
• If, for example, the trimming was misadjusted during initialisation, the trimming can be returned to the centre position.
Then move the slider for gyro sensitivity back and forth quickly 3 x. It has to be in the AVCS mode in the end. This saves
the current lever position (incl. trimming) as new neutral position.
• Let the rotor start up and slowly increase the speed. The helicopter must not lift off yet.
• If the model starts growing “light”, check the tail rotor function.
• If the tail rotor control works properly, let the helicopter lift off and check the gyro function.
If the tail moves back and forth quickly all the time, the gyro sensitivity is set too high. In this case, reduce the gyro
sensitivity or reduce the distance “A” at the tail servo lever (see figure 3).
If the tail turns away in fast pitch changes, the gyro sensitivity is too low. In this case, increase the gyro sensitivity or
increase the distance “A” at the tail servo lever (see figure 3).
Technical Data
Operating voltage ........................................... 4.5 – 6.5 V/DC
Power intake approx. ...................................... 50 – 100 mA
Connector system ........................................... Futaba
Control for the analogue/digital servos ............. 50/333 Hz
Servo centre position ...................................... 1520 µs
Dimensions .................................................... 26 x 24 x 9 mm
Weight incl. connection cable .......................... 12 g
52

13. Speed Controller “GUEC GE-610”
Before taking the speed controller into operating, read the notes on operation and programming carefully.
Performance Characteristics
• High-performance micro-processor for max. motor compatibility and highest efficiency
• Max. speed 210,000 rpm (for 2-pin motors), 70,000 rpm (6-pin), 35,000 rpm (12-pin)
• 3 start modes: Normal, soft, very soft for direct or gear drives
• Configurable throttle range for all transmitters on the market
• Straight-lined and quick throttle acceptance
• Microprocessor with separate voltage controller for best interference suppression
• Protective switching for undervoltage, overheating and RC signal loss
• Switchable BEC-voltage of 5.25 and 6 V
• Active speed controller mode for model helicopter (governor mode)
Programmable Settings
Attention, important!
Before taking the speed controller into operation, you always have to programme the controller individually to the
helicopter or plane model used by you.
1. Braking: Off / soft / hard / very hard (standard setting: off)
2. Battery type: Lithium (LiIo- or LiPo-batteries) / NiMH-batteries (standard setting: Lithium)
3. Cut-off mode: Soft = step-by-step decrease of the output performance / hard = immediate switch-off of the output
performance (default setting: soft)
4. Cut-off switching threshold: Low / medium / high (default settings: medium)
For Lithium batteries, the values correspond to 2.85 V / 3.15 V / 3.30 V per cell.
For NiMH batteries, the values correspond to 50% / 62.5% / 75% of the starting voltage.
5. Start mode: Normal / soft / very soft (default setting: very soft)
The setting “normal” is recommended for flight models with direct drive.
The settings “soft” with 3 s start-up time and “very soft” with approx. 8 s start-up time are mainly suitable for flight
models with gear motors and helicopter models.
If the motor is switched off after starting and full throttle is activated again within 3 seconds, the controller briefly
switches from “soft” or “very soft” to “normal” to prevent danger of damage to the model from the delayed throttle
acceptance.
6. Timing: 0° / 3.75° / 7.5 / 11.25° / 15° / 18.75° / 22.5° / 26.25° (default setting: 15°)
Usually, low timing values are sufficient for most motors. Since there is a great many different motors on the market,
you should determine the best timing value for your own. Usually, slightly higher timing values will also provide slightly
more power; at the same time, however, it increases power consumption and thermal load of the motor, controller and
battery.
7. Governor mode: off / low / high (default setting: off)
If the governor mode is active, the controller tries to keep the motor speed constant at all times in spite of different
loads.
In the setting “low”, the speed area of a 2-pin motor is 10,000 to 45,000 rpm. In the setting “high”, the speed area of
a 2-pin motor is 46,000 to 200,000 rpm.
To prevent exceeding of the maximum blade tip speed, you should always measure the rotor head speed. The governor
mode is only active if the throttle lever position exceeds 60%.
53

8. Unused menu item 1
9. Clock frequency: 12 kHz / 8 kHz (default setting: 12 kHz)
The motor control frequency of 8 kHz is suitable for most brushless motors. For motors with a high KV indication and
many poles, higher clock frequencies enable better motor run. However, this increases the thermal load on the controller.
10. BEC voltage: 5.25 V / 6 V (default setting 5.25 V)
11. Unused menu item 2
12. LiPo cells: Auto / 2S / 3S / 4S / 5S / 6S (default settings: Auto)
When connecting the rechargeable battery to the speed controller, it emits several sound signals according to the
number of the battery cells recognised. If older or weaker batteries are used, there may be errors in automatic cell
recognition. In this case, we recommend manually setting the cell number.
Commissioning
1. Set the throttle control lever of your remote control in the lowest position (motor off).
2. Connect the rechargeable battery to the speed controller. Always observe correct polarity of the connection cables:
Red = plus (+) and black = minus (-).
The controller now performs a self-test and emits 3 short sounds with increasing pitch via the applied voltage to
indicate that the applied voltage is in the normal range.
Then 2 – 6 short sounds are emitted depending on number of cells.
Finally, a long signal sound indicates the end of the self-test and readiness of the controller for operation. At the same
time, the signal sounds are visually supported by synchronous flashing of the installed red LED.
If the connected motor does not emit any signals, check correct wiring.
If the controller only emits two short sounds after the 3 short tones with increasing pitch, the correct position of
the throttle control lever is recognised as full throttle position. In this case, put the control lever in the correct
position or press the servo reverse function at the transmitter for the throttle channel.
If the red LED flashes 2 x per second, the connected operating voltage of the speed controller is too low or too
high. In this case, check the connected rechargeable battery.
3. Because every transmitter has slightly different control signals, the actually present control path must be stored in the
speed controller. The precise procedure is described in the following section “Teaching the Throttle Control Path”.
Alarm Sounds
Input voltage outside of the permissible area:
During operation, the sped controller checks the operating voltage. If it is outside of the permissible voltage range, the
speed controller emits a warning signal via the connected motor. Two signal sounds are emitted at a distance of approx. 1
second and the red LED flashes at the same rhythm.
Transmitter signal is not recognised:
If the transmitter signal is not recognised during operation, the motor stops and emits a brief signal sound at an interval of
2 seconds. The red LED flashes at the same rhythm. Once a valid transmitter signal is recognised again, the speed controller
switches on the motor again.
Throttle control lever in the wrong position:
If the throttle control lever is not in the bottom-most position, the motor connected to the speed controller emits short
signals at an interval of 0.25 seconds and the red LED flashes at the same rhythm. If the control lever is put in the bottommost position, 2 – 6 short sounds are emitted depending on number of cells, and readiness for operation is then put in the
bottom-most position. Then operational readiness is indicated with a long sound.
54

Protective Functions
Problems at motor start-up:
If the motor does not start up within 2 seconds of activating the throttle, the protective switch of the speed controller
switches off the motor. For repeated motor start-up after removal of the problem, the control lever first has to be returned
to the bottom-most position (motor off).
A possible cause for incorrect motor start-up can be mechanical blocks of the motor or gear, as well as incorrect connection
between the motor and speed controller.
Overheating protection:
If the speed controller exceeds the max. permissible operating temperature during operation, the output power is automatically reduced.
Transmitter signal is not recognised:
If the transmitter signal is not recognised for more than 0.25 seconds during operation, the motor stops. Once a valid
transmitter signal is recognised again, the speed controller switches on the motor again.
Teaching in the Throttle Control Path
1. Switch on the transmitter and verify the settings for the throttle path at the remote control. It should be 100% in either
direction.
2. Put the throttle control lever in the full throttle position and connect the rechargeable battery to the speed controller.
3. The motor connected to the controller emits 3 brief sounds with increasing pitch and two brief sounds after 2 seconds.
The full throttle position is saved.
4. Then move the control lever to the bottom-most position at once. The motor now emits the 2 – 6 brief signal sounds
depending on the number of cells, then one long signal.
5. The speed controller now has stored the actual control path of the throttle channel and is ready for operation.
55

Programming the Speed Controller
1. Call programming mode
• Switch on the transmitter and move the throttle control lever to the full throttle position.
• Connect the rechargeable battery to the speed controller. The motor connected to the controller emits 3 brief sounds
with increasing pitch and two brief sounds after two seconds.
• After another 5 seconds, the connected motor emits 5 brief sounds with increasing pitch.
• The controller is now in programming mode.
2. Call menu item
• In programming mode, you will now hear 14 groups of different signals that are continually repeated in a loop. The
red LED flashes at the same rhythm. Assignment of the respective signal sounds to the menu items can be taken
from the following table.
No. Sound sequence Menu item or function
1 1 x brief Braking
2 2 x brief Battery type
3 3 x brief Cut-off mode
4 4 x brief Cut-off switching threshold
5 1 x long Start mode
6 1 x long, 1 x brief Timing
7 1 x long, 2 x brief Governor mode
8 1 x long, 3 x brief Unused menu item 1
9 1 x long, 4 x brief Clock signal
10 2 x long BEC voltage
11 2 x long, 1 x brief Unused menu item 2
12 2 x long, 2 x brief LiPo cells
13 3 x long, 1 x brief Call default settings
14 3 x long, 2 x brief Exit programming mode
• To call a specific menu item, slide the throttle control lever to the bottom-most position (motor off) within 3 seconds
of the respective sound signal.
• The speed controller thus switches to setting mode for the menu item called.
56

3. Adjusting values
• In the setting mode, you will now also hear different signals (see top line of the following table), which repeat in a
continuous loop. The red LED flashes at the same rhythm. The point where the sequence starts again depends on the
menu item set, since only those sounds are emitted for which a value is set and stored as well.
• After the sound signal for the desired value, slide the throttle control lever from the bottom-most position (motor off)
to the full throttle position at once.
• 4 sounds are emitted as confirmation for the stored value.
• The speed controller returns to the programming mode, where you can call and set the next menu item if required.
1 x brief 2 x brief 3 x brief 4 x brief 1 x long 1 x long 1 x long 1 x long
Braking Off soft hard very hard
Battery type Lithium NiMH
Cut-off mode soft hard
Cut-off switching threshold low medium high
Start mode normal soft very soft
Timing 0° 3,75° 7,5° 11,25° 15° 18,75° 22,5° 26,25°
Governor mode Off low high
Unused menu item 1
Clock signal 12 kHz 8 kHz
BEC voltage 5.25 V 6 V
Unused menu item 2
LiPo cells Auto 2S 3S 4S 5S 6S
1 x brief 2 x brief 3 x brief
The standard settings are displayed on a grey background in the table
4. Leaving the programming mode
• If the controller is in programming mode, wait until menu item 14 is acoustically displayed. Then slide the throttle
control lever from the full throttle position to the bottom-most position (motor off) within 3 seconds of the sound
signal. First, you will hear 5 separate sounds, then the motor emits the sequence for commissioning.
• Once the controller is in setting mode and you have stored a new value, pull the throttle control lever back to the
bottom position (motor off) right after the confirmation sound sequence. First, you will hear 5 separate sounds, then
the motor emits the sequence for commissioning.
Technical Data
Power supply.................................................. 2 – 6 LiPo-cells or 5 – 18 NiMH-cells
Continuous current ......................................... 100 A
Peak current................................................... 150 A
BEC output power .......................................... 5.25 / 6 V, 4 A
Dimensions .................................................... 75 x 35 x 17 mm
Weight ........................................................... 82 g
57

Table des matières
Page
1. Introduction .................................................................................................................................................. 58
2. Utilisation conforme ....................................................................................................................................... 59
3. Description du produit .................................................................................................................................... 59
4. Étendue de la livraison ................................................................................................................................... 59
5. Consignes de sécurité .................................................................................................................................... 60
a) Généralités ............................................................................................................................................... 60
b) Avant la mise en service ............................................................................................................................ 60
c) Durant le fonctionnement .......................................................................................................................... 61
6. Remarques spécifiques aux piles et batteries ................................................................................................... 62
7. Remarques générales à propos du montage du mécanisme .............................................................................. 63
8. Montage du mécanisme ................................................................................................................................. 65
9. Maintenance et entretien ................................................................................................................................ 72
10. Élimination .................................................................................................................................................... 72
a) Généralités ............................................................................................................................................... 72
b) Piles et batteries ....................................................................................................................................... 72
11. Caractéristiques techniques ............................................................................................................................ 73
12. Heading Lock Gyro « GU 211 » ....................................................................................................................... 74
13. Régulateur de vitesse « GUEC GE-610 » ......................................................................................................... 81
1. Introduction
Chère cliente, cher client,
Nous vous remercions pour l’achat du présent produit.
Ce produit est conforme aux exigences légales, nationales et européennes.
Afin de maintenir l’appareil en bon état et d’en assurer un fonctionnement sans risque, l’utilisateur doit impérativement
respecter le présent mode d’emploi !
Le présent mode d’emploi fait partie intégrante du produit. Il contient des remarques importantes pour la mise en
service et la manipulation du produit. Tenez compte de ces remarques, même en cas de cession de ce produit à
un tiers.
Conservez le présent mode d’emploi afin de pouvoir le consulter à tout moment !
Tous les noms d’entreprises et appellations de produits contenus dans ce mode d’emploi sont des marques déposées des
propriétaires correspondants. Tous droits réservés.
Pour toute question technique, veuillez vous adresser à :
France : Tél. : 0892 897 777
Fax : 0892 896 002
e-mail : support@conrad.fr
Du lundi au vendredi de 8h00 à 18h00, le samedi de 8h00 à 12h00
Suisse : Tél. : 0848/80 12 88
Fax : 0848/80 12 89
e-mail : support@conrad.ch
Du lundi au vendredi de 8h00 à 12h00 et de 13h00 à 17h00
58

2. Utilisation conforme
Ce produit est un modèle réduit d’hélicoptère à entraînement électrique conçu pour une utilisation privée dans le domaine
du modélisme et pour les durées de fonctionnement inhérentes. Une télécommande compatible est requise pour le pilotage
du modèle réduit d’hélicoptère (non fournie).
Toute utilisation autre que celle stipulée ci-dessus provoque l’endommagement du présent produit, ainsi que des risques de
courts-circuits, d’incendie, d’électrocution, etc. Impérativement respecter les consignes de sécurité !
Le produit ne doit ni prendre l’humidité ni être mouillé.
Ce produit n’est pas approprié aux enfants âgés de moins de 14 ans.
Observer toutes les consignes de sécurité stipulées dans le présent mode d’emploi. Celles-ci contiennent des
informations importantes relatives à l’utilisation du produit.
Vous êtes seul responsable de l’utilisation sans danger du modèle réduit !
3. Description du produit
Le modèle réduit d’hélicoptère est livré en kit de pièces détachées et contient tous les composants requis pour le montage
du mécanisme. En fonction du modèle, le mécanisme du modèle réduit d’hélicoptère est fourni avec d’autres composants
tels que moteur d’entraînement, régulateurs, servos et gyroscope.
Le montage du mécanisme ainsi que l’assemblage des composants d’entraînement et de commande à distance sont à la
charge de l’utilisateur. La finalisation et l’utilisation de ce modèle réduit impliquent donc des connaissances solides et
détaillées en rapport avec les modèles réduit d’hélicoptère.
Ce modèle réduit d’hélicoptère ne convient pas pour les enfants et les débutants dans le domaine du modélisme !
4. Contenu de la livraison
• Mécanisme de l’hélicoptère
• Manuel du fabricant avec croquis de montage
• Notice de montage
59

5. Consignes de sécurité
Tout dommage résultant du non-respect du présent mode d’emploi entraîne l’annulation de la garantie légale/du fabricant. Nous déclinons toute responsabilité pour les dommages consécutifs !
De même, nous n’assumons aucune responsabilité en cas de dommages matériels ou corporels
résultant d’une utilisation de l’appareil non conforme aux spécifications ou du non-respect des
présentes consignes de sécurité ! De tels cas entraînent l’annulation de la garantie.
La garantie ne couvre pas les traces d’usure normales résultant de l’utilisation (par ex. roues dentées ou engrenages servos usés) et les dommages causés par un accident (par ex. plaque de retenue de roulement ou pales de
rotor cassées).
Chère cliente, cher client, ces mesures de sécurité servent non seulement à la protection du produit mais également à assurer votre propre sécurité et celle d’autres personnes. Veuillez donc très attentivement lire ce chapitre
avant la mise en service du produit !
a) Généralités
Attention, remarque importante !
L’utilisation du modèle réduit peut occasionner des dommages matériels et/ou corporels. Veillez donc impérativement à ce que l’utilisation du modèle réduit soit couverte par votre assurance, par ex. par une assurance responsabilité civile. Si vous avez déjà souscrit une assurance responsabilité civile, veuillez vous renseigner auprès de
votre compagnie d’assurance si l’utilisation du modèle réduit est bien couverte par cette assurance avant la mise
en service du modèle réduit.
Veuillez noter : Une assurance est obligatoire pour tous les modèles réduits d’avion dans divers pays de l’Union
européenne !
• Pour des raisons de sécurité et d’homologation (CE), il est interdit de modifier la construction et/ou de transformer le
produit soi-même.
• Ce produit n’est pas un jouet et ne convient pas aux enfants de moins de 14 ans.
• Le produit ne doit ni prendre l’humidité ni être mouillé.
• Au cas où vous n’auriez pas de connaissances suffisantes concernant l’utilisation de modèles réduits télécommandés,
veuillez vous adresser à un modéliste expérimenté ou à un club de modélisme.
• Ne laissez pas traîner le matériel d’emballage. Il pourrait devenir un jouet dangereux pour les enfants.
b) Avant la mise en service
• Lors de la mise en service de la télécommande, respectez scrupuleusement l’ordre indiqué par le fabricant. En règle
générale, il faut toujours d’abord raccorder l’émetteur puis la batterie de propulsion de l’hélicoptère au régulateur de
vitesse.
Dans la mesure où vous n’utilisez pas le modèle réduit avec une télécommande 2,4 GHz, veillez à ne pas simultanément
utiliser un autre émetteur sur le même canal de commande à distance.
• Assurez-vous de la sécurité de fonctionnement de votre modèle réduit et de la télécommande. Assurez-vous de l’absence
de dommages visibles comme par ex. des connexions défectueuses ou des câbles endommagés. Toutes les pièces
mobiles doivent être facilement manœuvrables, mais ne doivent pas avoir de jeu dans le logement.
• La batterie de propulsion requise pour le fonctionnement et celles éventuellement utilisées dans la télécommande doivent
être rechargées conformément aux instructions du fabricant.
• Avant chaque mise en service, il faut contrôler et éventuellement ajuster les réglages de le la compensation sur l’émetteur
pour les différentes directions de marche.
• Choisissez un terrain approprié pour l’utilisation de votre modèle réduit d’hélicoptère.
• Avant chaque mise en service, effectuez un test de portée de la télécommande conformément aux instructions du
fabricant.
60

c) Durant le fonctionnement
• Ne prenez pas de risques durant l’utilisation du produit ! Votre sécurité personnelle et celle de votre entourage dépendent
exclusivement de votre comportement responsable lors de la manipulation du modèle réduit.
• Un maniement incorrect peut provoquer de graves dommages matériels et des dommages corporels ! Pour cette raison,
veillez lors de la mise en service à maintenir une distance suffisante par rapport aux personnes, animaux et objets.
• Ne pilotez jamais le modèle réduit directement vers les spectateurs ou vers vous-même.
• Pilotez uniquement votre modèle réduit lorsque vous êtes en pleine possession de vos moyens. La fatigue, l’alcool et les
médicaments peuvent fausser vos réactions.
• Le moteur, le régulateur de vitesse et la batterie de propulsion peuvent chauffer pendant l’utilisation. Pour cette raison,
effectuez une pause de 5 à 10 minutes avant de recharger la batterie de propulsion ou de poursuivre le vol avec une
batterie de propulsion de rechange le cas échéant.
• Laissez toujours la télécommande (émetteur) allumée tant que le modèle réduit est en service. Après l’atterrissage,
déconnectez toujours d’abord la batterie de propulsion du régulateur de vol. Vous pouvez ensuite éteindre la télécommande.
• N’éteignez jamais l’émetteur pendant le fonctionnement sans déconnecter auparavant la batterie de propulsion du régulateur de vitesse.
• En présence d’un défaut ou d’un dysfonctionnement, d’abord éliminer la cause de la panne avant de redémarrer le modèle
réduit.
• N’exposez pas votre modèle réduit et la télécommande à un rayonnement solaire direct ou à une chaleur trop élevée
pendant une durée prolongée.
61

6. Remarques spécifiques aux piles et batteries
Bien que le maniement de piles et de batteries dans la vie quotidienne fasse partie de la normalité de la vie, ceci présente
toutefois de nombreux problèmes et dangers. En particulier avec les batteries LiPo/LiIon et leur contenu énergétique élevé
(en comparaison aux batteries traditionnelles NiCd ou NiMH), différentes consignes doivent impérativement être observées,
sans quoi il y a risque d’explosion et d’incendie.
Pour cette raison, observez impérativement les informations et consignes de sécurité indiquées ci-dessous relatives au
maniement de piles et de batteries.
• Maintenez les piles et batteries hors de la portée des enfants.
• Ne laissez pas traîner les piles et batteries, les enfants ou les animaux domestiques risqueraient de les avaler. En tel cas,
consultez immédiatement un médecin !
• Ne court-circuitez ni ne démontez jamais les piles et batteries et ne les jetez jamais dans le feu. Il y a risque d’explosion !
• En cas de contact avec la peau, les piles / batteries qui fuient ou sont endommagées peuvent entraîner des brûlures à
l’acide. En tel cas, veuillez donc utiliser des gants de protection appropriés.
• Les piles conventionnelles ne sont pas rechargeables. Il y a risque d’incendie et d’explosion ! Ne rechargez que les
batteries prévues à cet effet ; n’utilisez que des chargeurs de batteries appropriés. Les piles (1,5 V) ne sont conçues que
pour un usage unique. Une fois vides, elles doivent être éliminées selon les prescriptions.
• Insérez les piles ou les batteries ou raccordez le pack de batteries ou un chargeur en respectant la polarité correcte (ne
pas inverser plus/+ et moins/-). L’inversion de la polarité endommage non seulement l’émetteur mais aussi le modèle
réduit et les batteries. Il y a également risque d’incendie et d’explosion.
• Remplacez toujours le jeu entier de piles ou de batteries. Ne mélangez pas les piles / batteries pleines avec des piles /
batteries à moitié pleines. N’utilisez que des piles ou batteries du même type et du même fabricant.
• Ne mélangez jamais piles et batteries ! Utilisez soit des piles soit des batteries.
• Si vous n’utilisez pas l’appareil pendant une durée prolongée (par ex. lors d’un stockage), retirez les piles (ou les batteries)
de la télécommande car elles risqueraient de corroder et ainsi d’endommager l’appareil.
Attention !
Après le vol, déconnectez la batterie de propulsion de l’hélicoptère. Débranchez la batterie de propulsion de
l’hélicoptère lorsque vous ne l’utilisez pas (par ex. lors du transport ou du stockage). Le cas échéant, la batterie de
propulsion pourrait être totalement déchargée ce qui risquerait de la détruire ou de la rendre inutilisable !
• Rechargez les batteries environ tous les 3 mois, car l’autodécharge peut provoquer une décharge dite profonde, ce qui
rend les batteries inutilisables.
• Ne rechargez jamais la batterie de propulsion immédiatement après son utilisation. Attendez toujours d’abord que la
batterie de propulsion LiPo ait refroidi (pendant au moins 5 à 10 minutes).
Ne rechargez que les batteries intactes et non endommagées. Si l’isolation externe de la batterie devait être endommagée
ou la batterie déformée ou gonflée, il est absolument interdit de la charger. En tel cas, il y a un risque élevé d’incendie et
d’explosion !
• N’endommagez jamais l’enveloppe extérieure de la batterie de propulsion, ne pas découper le film de protection ni percer
la batterie de propulsion au moyen d’objets tranchants. Il y a risque d’incendie et d’explosion !
• Retirez la batterie de propulsion à charger du modèle réduit et placez-la sur une surface réfractaire. Observez une
distance minimale de sécurité par rapport aux objets inflammables.
• Rechargez uniquement les batteries avec l’intensité de courant indiquée par le fabricant et veillez alors à ne pas dépasser
les valeurs maximales autorisées.
• Le chargeur et la batterie de propulsion s’échauffant pendant la procédure de charge, il est nécessaire d’assurer une
ventilation suffisante. Ne recouvrez jamais le chargeur ni la batterie de propulsion. Ceci vaut naturellement également
pour d’autres chargeurs et batteries.
• Ne rechargez jamais les batteries sans surveillance.
• Débranchez la batterie de propulsion du chargeur dès qu’elle est complètement rechargée.
• Il faut impérativement veiller à ce que les chargeurs et les batteries ne prennent pas l’humidité et ne soient pas mouillés.
Il y a un risque d’électrocution mortelle. De plus, un risque d’incendie et d’explosion émane de la batterie !
62

7. Remarques générales à propos du montage du
mécanisme
Avant de commencer le montage du mécanisme, vous devez prendre connaissances de plusieurs remarques importantes :
• Les performances du modèle réduit d’hélicoptère dépendent de la qualité de son montage. Le montage doit donc
minutieusement être effectué en respectant à la lettre les instructions fournies dans le manuel. Les modèles réduits
d’hélicoptère montés de manière incorrecte ne volent pas seulement plus mal, ils comportent également des risques
élevés en matière de sécurité.
• Lors de l’assemblage, respectez à la lettre les croquis de montage fournis dans le manuel du fabricant. Tenez alors
également compte du fait que certains composants doivent être fixés à l’aide d’un vernis de blocage liquide (non fourni).
À cet effet, les symboles suivants sont employés dans les différents croquis de montage (voir également manuel du
fabricant, page 6).
Raccord vissé avec vernis de blocage L
L
Raccord vissé de sécurité* avec vernis de blocage L
L
Raccord vissé avec vernis de blocage T
T
Raccord vissé de sécurité* avec vernis de blocage T
T
Application de vernis de blocage T
T
Application de colle instantanée
CA
Application de lubrifiant
Veillez à l’exécution correcte de l’étape de montage
!
Veillez particulièrement à l’exécution correcte de l’étape de montage
!
Le respect des indications sur les croquis de montage est absolument primordial pour le fonctionnement et la
sécurité de fonctionnement du modèle réduit.
!
* Comme la sécurité de fonctionnement du modèle réduit dépend de ces raccords vissés, veillez particulièrement à une
jonction / assemblage par vis correct des composants sans pour autant surcharger les vis ou le composant.
63

Vous pouvez par exemple employer du « LOCTITE 221 » à faible adhérence comme vernis de blocage « L » et du
« LOCTITE 243 » à adhérence moyenne comme vernis de blocage « T ».
L’application de vernis de blocage à adhérence moyenne sur tous les raccords vissés a également fait ses preuves dans la
pratique. Afin de pouvoir desserrer les raccords vissés pour l’entretien, nous vous déconseillons d’utiliser des vernis de
blocage à adhérence élevée.
• N’ouvrez le sachet d’emballage correspondant qu’au dernier moment avant le montage des composants correspondants.
À cet effet, placez les différents composants dans une boîte distincte (boîte de glace vide ou similaire).
• N’effectuez les différentes étapes de montage qu’après avoir compris toutes les opérations à effectuer et lorsque vous
savez exactement où fixer le composant correspondant.
• Les vis fournies ont différentes longueurs et différentes têtes. Veiller à employer les vis adéquates. En cas de doute, vous
pouvez poser les vis à l’échelle 1:1 en haut à gauche sur les croquis et ainsi vous assurez qu’il s’agisse bien de la vis
appropriée.
• Employez uniquement le matériel fourni avec le kit et n’essayez pas de modifier le modèle réduit à l’aide de matériel de
montage étranger ou non approprié. En présence d’un défaut, remplacez les pièces et composants concernés par des
pièces d’origine figurant dans la liste des pièces détachées.
• Employez des outils de montage de qualité supérieure comme par ex. une clé à six pans creux avec des empreintes
proprement rectifiées et durcies. Les outils bon marché ont tendance à se déformer et peuvent ainsi endommager les
têtes des vis.
• Montez le modèle réduit d’hélicoptère sur une surface appropriée (chiffon en coton doux ou similaire) afin de ne pas rayer
ni endommager le mécanisme.
64

8. Montage du mécanisme
Consultez le manuel du fabricant avec les croquis de montage et commencez le montage du modèle réduit d’hélicoptère
conformément aux illustrations à partir de la page 7.
Page 7
Illustration du haut :
Montez d’abord le support pour le tube de queue (# B) puis vissez les deux plaques du châssis de la manière indiquée sur
l’illustration. Veuillez noter que les deux plaques du châssis ne sont pas identiques et qu’elles impliquent l’utilisation de vis
de différentes longueurs. Employez du vernis de blocage pour raccord vissé.
Les deux vis M3x18 ne doivent être serrées à fond qu’après le montage du tube de queue (voir page 13, illustration du bas).
Illustration du bas :
Montez le train d’atterrissage de la manière indiquée sur l’illustration. Les étriers des patins doivent alors pointer vers l’avant
dans le sens de vol (voir également page 9). À cet effet, utilisez trois raccords pour plaques de châssis qui comportent
uniquement un perçage sans filetage dans l’alésage vertical pour les vis M3x16 et la vis M3x10.
Les deux vis M3x16 et la vis M3x10 ne doivent être serrées à fond qu’après avoir assemblé, aligné et vissé le châssis avec
le train d’atterrissage (voir figure suivante).
Page 8
Illustration du haut :
Positionnez le châssis sur le train d’atterrissage puis vissez cet ensemble. Employez du vernis de blocage pour chaque
raccord vissé. Les raccords pour plaques de châssis à l’avant et à l’arrière doivent comporter, au centre, un filetage pour les
vis à tête fraisée M3x6. Les plaques de châssis avant et arrière doivent être tournées de manière à ce que les vis à tête
fraisée soient à fleur de la surface.
Illustration du bas :
Introduisez la transmission principale avec la rondelle d’écartement 8x13x2 dans le mécanisme puis glissez l’arbre du rotor
par le haut dans le mécanisme. L’alésage le plus proche de l’extrémité de l’arbre doit alors pointer vers le bas en direction
de la transmission principale.
Après avoir assemblé l’arbre du rotor avec la transmission principale à l’aide de la vis M3x16, glissez la bague de réglage par
le haut sur l’arbre du rotor. Bloquez la bague de réglage à l’aide de deux vis sans tête M3x3. L’arbre du rotor ne doit pas
présenter de jeu vertical dans le mécanisme.
Page 9
Illustration du haut :
À l’aide des vis M2,6x10, montez les trois servos des plateaux oscillants et le servo arrière aux emplacements prévus à cet
effet de la manière indiquée sur les illustrations 1 à 3.
Important !
Dans la mesure où votre modèle réduit d’hélicoptère est fourni avec les servos, observez les désignations exactes
des servos. Pour le plateau oscillant, vous devez utiliser trois servos identiques (par ex. GS 501). La commande de
queue nécessite cependant un servo plus rapide (par ex. GS 502). Pour la pose propre des câbles, le châssis est
muni à l’arrière de fentes qui permettent de tirer les serre-câbles.
Illustration du bas :
Le gyroscope arrière peut être monté au-dessus de la fixation du tube de queue. Le récepteur se monte à l’arrière du fond
du châssis et le régulateur de vitesse à l’avant.
65

Page 10
Illustration du haut :
Positionnez le support moteur sur le moteur puis serrez les quatre vis (2 vis M3x6 et 2 vis M3x10) en veillant à pouvoir
encore glisser le moteur sur le support. Montez ensuite le pignon moteur sur l’arbre moteur puis fixez le pignon à l’aide de
vis sans tête M3x3. Le pignon doit être positionné sur l’arbre moteur de manière à ne dépasser par la suite ni par le bas ni
par le haut de la roue dentée principale.
Illustration du bas :
Installez le moteur dans le châssis de la manière indiquée sur le croquis puis vissez à fond le support moteur à l’aide de six
vis M3x6 sur le châssis. Respectivement employer deux vis à tête cylindrique sur les côtés et deux vis à tête fraisée sur le
haut.
Pour régler le jeu des flancs des dents, insérez une fine bande de papier entre le pignon moteur et la roue dentée de la
transmission, poussez le moteur vers la transmission puis vissez le moteur par le bas sur le support moteur. Retirez ensuite
la bande de papier.
Après le réglage correct, les deux roues dentées s’engrènent correctement sans se coincer et sans jeu trop important.
Conseil pratique :
Comme les quatre vis de fixation du moteur ne sont plus accessibles après le montage, ne d’abord fixer le support
moteur avec le moteur que dans le mécanisme.
Après le réglage du jeu des flancs des dents, il suffit de fixer le moteur à l’aide des vis accessibles par le bas. Le
support moteur avec le moteur doit ensuite redémonté pour serrer à fond toutes les quatre vis. Le support moteur
doit ensuite être réinséré dans le mécanisme puis serré à fond.
Les câbles de raccordement du moteur doivent être posés sur la face extérieure du châssis vers le bas en direction du
régulateur de vitesse et être raccordés à ce dernier.
Page 11
Illustration du haut :
Glissez d’abord le plateau oscillant et la pièce centrale avec les leviers du compensateur de pas sur l’arbre du rotor de la
manière indiquée sur l’illustration. Reliez les leviers du compensateur de pas avec le plateau oscillant puis installez la tête de
rotor. La pièce centrale à barres de Bell est déjà prémontée en usine. Les billes d’asservissement « A » doivent être fixées
dans les alésages extérieurs.
La tête de rotor est montée en usine avec des caoutchoucs amortisseurs souples (noirs). Pour un ajustage plus
rigide de la tête du rotor, des caoutchoucs amortisseurs rouges sont également fournis avec la tête de rotor.
Illustration du bas :
Assemblez les deux tringles d’asservissement des balancier de barre de Bell de la manière indiquée sur l’illustration en bas
à gauche. Après le montage du balancier de barre de Bell (voir également page 12, illustration du haut), orientez la barre
de Bell de manière à ce que les deux extrémités du balancier dépassent de la même longueur (voir croquis sur le bas de la
figure).
Page 12
Illustration du haut :
Desserrer puis alignez avec précision la barre sur la barre de Bell. Les palettes doivent respectivement se trouver à une
distance de 135 mm du balancier (voir croquis sous l’illustration) et être alignées à l’horizontale par rapport au balancier de
barre de Bell (voir croquis en bas à gauche).
Illustration du bas :
Glissez la courroie d’entraînement pour le rotor arrière dans le tube de queue et assemblez le boîtier du rotor de queue avec
l’arbre du rotor de queue de la manière indiquée sur l’illustration.
Important !
Veillez tenir compte du fait que les vis requises ont différentes longueurs.
66

Page 13
Illustration du haut :
Le rotor de queue prémonté se glisse avec le manchon coulissant sur l’arbre du rotor de queue de la manière indiquée sur
le croquis et se fixe à l’aide de deux vis sans tête M3x3.
Veillez alors à ce que les deux vis sans tête s’engrènent respectivement dans les évidements extérieurs de l’arbre du rotor
de queue.
Après avoir terminé les travaux sur le rotor de queue, contrôlez le fonctionnement de la commande du rotor de queue. Tous
les composants doivent se déplacer facilement mais ne doivent pas présenter de jeu au niveau du logement.
Important !
Serrez uniquement les vis des pales du rotor de queue de manière à ce que les pales du rotor puisse encore
proprement s’aligner en vol de 180° les unes par rapport aux autres.
Illustration du bas :
Glissez avec précaution le tube de queue par l’arrière dans le mécanisme. Veillez alors à tourner la courroie d’entraînement
de la manière indiquée sur le croquis.
Après avoir installé la courroie sur la roue motrice avant, reculez à nouveau le tube de queue. Veillez alors à ce que la
courroie soit correctement tendue. Pour ce faire, ne tendez la courroie que de manière à ce que l’entraînement complet du
rotor de queue puisse encore facilement fonctionner.
Lorsque la position du tube de queue est optimale et que l’empennage latéral est aligné à la verticale, serrez à fond les deux
vis M3x18 du châssis (voir page 7, illustration du haut) ainsi que les vis des deux supports du tube de queue. Reliez la
tringle du rotor de queue avec le servo du rotor de queue (voir également page 17, illustration du bas).
Page 14
Illustration du haut :
Montez les tringles d’asservissement de la tête de rotor et des plateaux oscillants de la manière indiquée sur les croquis
correspondants puis mettez en place les tringles.
Remarque importante !
Comme les entraînements électriques haute capacité peuvent être très dangereux, nous vous conseillons de
toujours débrancher le moteur du régulateur durant les travaux de maintenance et de réglage. Ceci permet
d’éviter de manière fiable un démarrage accidentel du mécanisme.
Après le montage des leviers du servo, lancez un programme hélicoptère avec une commande 120° à 3 points du plateau
oscillant (HR-3) sur l’émetteur de votre télécommande.
Réglez le sens de fonctionnement correct et la position médiane exacte des servos. Les trois leviers des servos du plateau
oscillant doivent alors parfaitement être alignés les uns par rapport aux autres (voir petit croquis) à l’horizontale lorsque le
levier de commande du pas se trouve en position médiane.
Illustration du bas :
Après le montage du guide de plateau oscillant et des pales du rotor, le montage du mécanisme est achevé. Lors du
montage du guide de plateau oscillant, veillez à ce que le côté avec la hauteur inférieure de la rainure de guidage soit monté
à l’avant dans le sens de vol.
Les vis des pales du rotor doivent uniquement être serrées de manière à ce que les pales du rotor puissent encore être
orientées en vol de 180° les unes par rapport aux autres.
67

Page 15
Contrôle des directions de pilotage :
Illustration du haut :
L’illustration montre la commande d’altitude du modèle réduit d’hélicoptère, il montre les déplacements respectifs du levier
sur les télécommandes en mode I et en mode II.
Pour augmenter l’angle d’incidence des pales du rotor afin de prendre de l’altitude, le plateau oscillant sur l’arbre du rotor
principal doit être éloigné des servos en le déplaçant vers le haut. Veillez alors à ce que le plateau oscillant reste toujours à
l’horizontale durant les déplacements verticaux et à ce qu’il ne renverse pas sur le côté.
Illustration du milieu :
L’illustration montre la commande directionnelle du modèle réduit d’hélicoptère. À cet effet, le plateau oscillant doit toujours
basculer dans le sens de commande. Veillez alors à ce que le plateau oscillant présente le même angle d’inclinaison à droite
et à gauche. L’angle d’inclinaison vers l’avant et l’arrière doit également être identique.
Illustration du bas :
L’illustration montre la commande de la queue du modèle réduit d’hélicoptère. En cas de commande vers la droite sur la
télécommande, le manchon coulissant de la commande du rotor de queue doit se déplacer en direction du boîtier de la
transmission sur l’arbre du rotor de queue. Le cas contraire, inversez le sens de marche du servo arrière sur l’émetteur.
En tel cas, contrôlez également la direction de l’effet du gyroscope. Lorsque la pointe du fuselage de l’hélicoptère est
tournée vers la gauche, dans le sens antihoraire (vu du haut), le manchon coulissant doit également être déplacée par le
gyroscope vers le boîtier de la transmission. Le cas contraire, inversez le sens de marche du servo arrière sur le gyroscope.
Pour finir, ajustez également les débattements max. du servo arrière sur le gyroscope.
Page 16
Illustration du haut :
L’illustration montre le déroulement schématique d’une courbe de gaz (Throttle) et d’une courbe de pas pour le vol normal
(Normal Flight) et pour le vol acrobatique extrême (Freestyle / Aggressive).
Veuillez cependant considérer ces valeurs comme des valeurs approximatives pour vos réglages personnels qui vous devrez
définir dans la pratique, durant le vol.
Illustration du bas :
Avant de mesure l’angle d’incidence des pales à l’aide d’un gabarit de pas, assurez-vous que le plateau oscillant, les leviers
du compensateur de pas et les leviers articulés du porte-pales soient parallèles. L’angle d’incidence des pales du rotor doit
alors être égal à 0°.
Lorsque vous déplacez le levier de commande pour la fonction de pas (en vol normal) complètement vers le bas, vous
devriez pouvoir mesurer un angle d’incidence compris entre -2 et -3 ° sur les pales du rotor. Lorsque vous déplacez le levier
de commande complètement vers le haut, les pales du rotor devraient atteindre un angle d’incidence de 13°. L’angle de pas
négatif maximal (durant les vols acrobatiques) s’élève à -13°.
L’angle de pas collectif s’élève au maximum à +/- 13° et l’angle de pas cyclique à 10°.
68

Page 17
Contrôles avant le décollage
Illustration du haut :
Avant de mettre en marche le modèle réduit, contrôlez les points suivants :
1. Assurez-vous que tous les raccords vissés soient solidement fixés.
2. Contrôlez le jeu des flancs des dents entre le pignon moteur et la roue dentée principale. Toutes les roues dentées
doivent correctement s’engrener et la transmission doit tout de même se déplacer en souplesse.
3. Contrôlez l’entraînement du rotor de queue. Tous les composants mécaniques de l’entraînement du rotor de queue
doivent fonctionner de manière fiable et souple.
4. Assurez-vous que les composants électriques et la batterie d’entraînement soient correctement fixés. Assurez-vous
alors du respect de la distance entre la batterie d’entraînement et le moteur électrique. La distance doit être comprise
entre 5 et 10 mm.
5. Veuillez à une fixation sûre de la batterie d’entraînement. Utilisez une bande auto-agrippante en plus des sangles de
fixation de la batterie. La bande auto-agrippante avec le crochet se colle sur le support de la batterie et la partie épaisse
de la bande auto-agrippante sur la batterie.
6. Assurez-vous que les pales du rotor soient correctement équilibrées. Durant le premier vol, veillez également à un
alignement correct et ajustez-le le cas échéant.
7. Assurez-vous que tous les arbres et roulements à billes tournent correctement et de manière souple.
8. Contrôlez l’intégralité du câblage. Contrôlez alors notamment les raccords entre le régulateur de vitesse et le moteur.
Illustration du bas :
9. Contrôlez la position du servo arrière et du rotor de queue. En position initiale, le levier du servo doit être perpendiculaire
à la commande (voir figure 1-4). Le levier articulé du manchon coulissant du rotor de queue doit alors également être
perpendiculaire à l’arbre du rotor de queue (voir figure 1-5).
10. Assurez-vous de la souplesse de la commande du rotor de queue (figures 1-6 et 1-7).
11. Après la mise en marche de l’émetteur et le raccordement de la batterie de propulsion, assurez-vous que les servos du
plateau oscillant et le rotor de queue se déplacent dans le bon sens. Lorsque vous tournez l’hélicoptère dans le sens
antihoraire autour de l’arbre du rotor, le gyroscope doit déplacer le manchon coulissant de la commande du rotor de
queue vers le boîtier de la transmission.
Page 18
Contrôles après chaque vol
Directement après le vol, il est recommandé de contrôler les points suivants :
1. Assurez-vous que tous les raccords vissés soient solidement fixés (voir également page 16).
2. Contrôlez le jeu des flancs des dents entre le pignon moteur et la roue dentée principale. Assurez-vous de l’absence
d’usure anormale et de dents cassées.
3. Contrôlez la transmission de l’entraînement du rotor de queue (voir également page 16).
4. Assurez-vous que les composants électriques soient correctement fixés (voir également page 16).
5. Assurez-vous que tous les arbres et roulements à billes tournent correctement et de manière souple (voir également
page 16).
6. Contrôlez la température du moteur, de la batterie et du régulateur de vitesse.
Important !
Attendez que le moteur et le régulateur de vitesse aient refroidi à température ambiante avant de décoller avec
une batterie de propulsion de rechange déjà chargée.
69

Maintenance minutieuse
1. Assurez-vous que les vis ne se soient pas desserrées et que les composants soient toujours solidement vissés.
2. Contrôlez le jeu des flancs des dents entre le pignon moteur et la roue dentée principale. Assurez-vous notamment que
le moteur ne se soit pas desserré et que les dents des deux roues dentées s’engrènent toujours correctement.
3. Contrôlez le jeu des flancs des dents sur l’entraînement du rotor de queue. Toutes les roues dentées doivent correctement
s’engrener et tout de même se déplacer en souplesse.
4. Assurez-vous que les différents arbres tournent correctement. Le moindre contact avec le sol des pales du rotor peut
considérablement déformer les arbres.
5. Assurez-vous que tous les roulements à billes tournent correctement. Les paliers qui, en cas d’actionnement à la main,
produisent un bruit de « roulement » ou de « grincement », doivent immédiatement être remplacés, au même titre que
les roulements à billes visiblement endommagés.
6. Contrôlez les palettes auxiliaires. Les palettes doivent toujours être alignées avec précision (voir page 12, illustration
du haut et la barre de Bell ne doit pas être déformée).
Page 19
Illustration du haut :
L’illustration montre le démontage de l’arbre du rotor principal. Les différentes étapes de travail comportent des numéros
sur l’illustration.
1. Retirez les vis du guide de plateau oscillant #208876 et retirez le guide de plateau oscillant.
2. Clipsez les trois tringles d’asservissement pour le plateau oscillant #208401 sur les leviers des servos.
3. Retirez la vis de l’arbre du rotor #208864 de la transmission principale.
4. Desserrez les vis sans tête #208865 de la bague de réglage des arbres du rotor.
5. Tirez l’arbre du rotor avec la tête de rotor par le haut hors du mécanisme.
6. Retirez la vis de la tête de rotor #208864 et retirez la tête de rotor de l’arbre.
Illustration du bas :
L’illustration montre le démontage de la transmission principale. Les différentes étapes de travail comportent des numéros
sur l’illustration.
1. Démontez d’abord l’arbre du rotor principal (voir ci-dessus).
2. Retirez le circlip #208368 au-dessous de la transmission principale.
3. Retirez les trois vis #208855 et retirez la pièce médiane #208360.
4. Retirez la rondelle d’écartement #208883.
5. Après avoir retiré les vis #208858, la pièce du fond #208358 et la course libre peuvent être retirées.
Attention !
Pour pouvoir correctement remettre en place la course libre par la suite, nous recommandons de le marquer d’un
côté à l’aide d’un crayon feutre. Lors de l’assemblage, la pièce médiane #208360 doit être huilée de la manière
indiquée sur l’illustration.
70

Page 20
Illustration du haut :
L’illustration montre le déroulement schématique du montage de la tête de rotor. Les bagues en caoutchouc #208902 (75°)
ou #208912 (90°) permettent d’ajuster l’amortissement de la tête de rotor (doux ou dur). Les différentes étapes de travail
pour le démontage comportent des numéros sur l’illustration.
Important !
Veuillez noter que la rondelle de palier intérieure de la butée à billes dans le porte-pales du rotor principal
comporte un alésage de plus grande taille (voir croquis en haut à droite).
Illustration du bas :
L’illustration montre le déroulement schématique du montage du rotor de queue. Les différentes étapes de travail pour le
démontage comportent des numéros sur l’illustration.
Pages 21 à 29
Les désignations et numéros correspondants des pièces détachées sont fournis sur les vues éclatées des différents modules
en pages 21 à 28.
Attention !
Veuillez noter que le numéro à 6 chiffres dans le manuel du fabricant ne correspond pas à la référence Conrad !
Une liste actuelle des pièces détachées avec les références Conrad Electronic correspondantes est disponible sur
www.conrad.com dans la rubrique Téléchargement du modèle réduit d’hélicoptère correspondant.
71

9. Maintenance et entretien
Afin de garantir la sécurité de fonctionnement de votre modèle réduit d’hélicoptère, des contrôles et des opérations de
maintenance doivent régulièrement être effectués (voir manuel du fabricant / notice de montage, pages 17 et 18).
Important !
Si vous devez renouveler des pièces endommagées ou usées, n’utilisez que des pièces de rechange d’origine pour
votre hélicoptère.
La liste des pièces détachées est disponible sur notre site web www.conrad.com dans la rubrique Téléchargement du
produit correspondant.
Vous pouvez également demander la liste de pièces de rechange par téléphone. Nos coordonnées sont indiquées au début
de ce mode d’emploi, dans le chapitre « Introduction ».
10. Élimination
a) Généralités
En fin de vie, éliminez le produit conformément aux consignes légales en vigueur.
b) Piles et batteries
Le consommateur final est légalement tenu (ordonnance relative à l’élimination des piles usagées) de rapporter toutes les
piles et batteries usagées, il est interdit de les jeter dans les ordures ménagères !
Les piles et batteries qui contiennent des substances toxiques sont identifiées à l’aide des symboles ci-contre qui
Vous pouvez rapporter gratuitement vos piles et batteries usagées aux centres de récupération de votre commune, à nos
succursales ou à tous les points de vente de piles et de batteries.
Vous répondez ainsi aux exigences légales et contribuez à la protection de l’environnement.
indiquent l’interdiction de les jeter dans les ordures ménagères. Les désignations pour le métal lourd prépondérant
sont : Cd = cadmium, Hg = mercure, Pb = plomb (vous trouverez la désignation sur la pile/batterie, par ex. audessous des symboles de poubelles figurant à gauche).
72

11. Caractéristiques techniques
Longueur du fuselage, y compris verrière de la cabine ... 1 020 mm
Diamètre du rotor principal........................................... 1 120 mm
Longueur du rotor principal .......................................... 500 à 550 mm
Hauteur ...................................................................... 343 mm
Largeur ....................................................................... 165 mm
Diamètre du rotor de queue ......................................... 230 mm
Diamètre du rotor de queue ......................................... 82 mm
Poids sans batterie de propulsion.................................. 1 850 g
Moteur électrique recommandé .................................... 1 820 W, 910 KV
Régulateur de vitesse recommandé .............................. 100 A
Servo numérique « GU-501 »
Dimensions ................................................................. 40,0 x 19,5 x 36,5 mm
Poids .......................................................................... 58,5 g
Temps de réglage 4,8 / 6 V .......................................... 0,16 / 0,13 s
Couple de commande 4,8 / 6 V .................................... 8,0 / 9,5 kg/cm
Couple d’arrêt 4,8 / 6 V ............................................... 16,0 / 19,0 kg/cm
Transmission ............................................................... Transmission partielle en métal
Palier .......................................................................... Double roulement à billes
Servo numérique « GU-502 »
Dimensions ................................................................. 40,0 x 19,5 x 36,5 mm
Poids .......................................................................... 58,5 g
Temps de réglage 4,8 / 6 V .......................................... 0,07 / 0,06 s
Couple de commande 4,8 / 6 V .................................... 4,0 / 4,5 kg/cm
Couple d’arrêt 4,8 / 6 V ............................................... 8,0 / 9,0 kg/cm
Transmission ............................................................... Transmission partielle en métal
Palier .......................................................................... Double roulement à billes
73

12. Heading Lock Gyro « GU 211 »
Description du produit :
Ce système gyroscopique est un système de stabilisation compacte reconnaissant à l’aide d’un capteur MEMS tout changement
de position. Une électronique intégrée permet de commander un servo connecté en aval afin de pouvoir compenser ainsi
tout changement de position. De par sa construction compacte et son poids léger, le système est idéal aussi pour les
modèles d’hélicoptère plus petits équipés d’un moteur électrique.
Vous pouvez utiliser le gyroscope ou bien en mode normal ou en mode AVCS (Angular Velocity Control System = contrôle
actif de la vitesse angulaire).
En mode normal, la correction de position par le servo connecté en aval est effectué aussi longtemps que le gyroscope
reconnaît un mouvement rotatif du modèle réduit.
En mode AVCS (mode Head Lock), la correction de position par le servo connecté en aval est effectuée jusqu’à ce que la
position initiale (position angulaire) du gyroscope soit rétablie.
L’effet du gyroscope est réglable et peut être ajusté ou commuté par l’émetteur.
Caractéristiques :
• Capteur de taux de rotation MEMS (microsystème électromécanique) et mode AVCS (système de contrôle vecteur angulaire)
• Équilibrage intégré de la température
• Modes normal et AVCS (Heading Hold) avec réglage externe de la sensibilité
• Traitement numérique des signaux
• Programmation à l’aide de la touche « SET »
• Convient pour les servos analogiques et numériques
Attention, important !
Le gyroscope n’est pas compatible avec les servos Futaba S9251, S9256, BLS251 et JR-2700G, 8700G, 810G.
Si vous souhaitez utiliser le gyroscope avec un servo analogique, ne raccordez le servo qu’après avoir commuté le
gyroscope pour les servos analogiques en mode de programmation. Si vous ne commutez pas le gyroscope et qu’il
est réglé pour les servos numériques, vous risqueriez de rapidement détruire le servo analogique.
Raccordements et accessoires
Attention, important !
Ne mettez en marche votre gyroscope qu’après avoir lu l’intégralité des chapitres suivants et lorsque vous savez
à quoi veiller pendant le montage et le service. C’est seulement ainsi que vous pouvez éviter tout dysfonctionnement
ou dommage.
Le gyroscope est raccordé à la sortie du récepteur pour le servo arrière. Le servo arrière même est connecté directement au
système gyroscopique. Ainsi, le gyroscope est intercalé entre le récepteur et le servo arrière. De plus, le gyroscope est relié
à une autre sortie du récepteur par le biais duquel s’effectuera ultérieurement le réglage de la sensibilité.
1. Gyroscope
2. Connexion du récepteur pour la sensibilité du gyroscope
3. Connexion du récepteur pour le servo arrière
4. Connecteur pour le servo arrière
5. Deux rubans adhésifs double face
6. Plaque en métal
5 5
3
4
1
6
QUEC
GU-211
1
S
2
GAUI
GYRO
3
SET
2
74
Figure 1

Montage du gyroscope
Lors du montage du gyroscope, veillez toujours à choisir un
emplacement de montage protégeant le gyroscope des vibrations
et des variations de température.
Souvent, les fabricants des différents modèles réduits d’hélicoptère
spécifient l’endroit de montage exact du gyroscope.
Si cela n’est pas le cas pour votre modèle réduit, choisissez un
emplacement de montage à proximité de l’arbre de rotor principal.
La plaque de montage sur laquelle vous fixez le gyroscope doit se
trouver à 90° par rapport à l’arbre de rotor principal.
Pour la fixation, utilisez uniquement la mousse adhésive double
face fournie avec l’appareil (voir croquis A).
Lorsqu’il a correctement été monté, l’axe de stabilisation du
gyroscope est parallèle à l’arbre du rotor principal.
Attention :
Lorsque l’hélicoptère dérive sur le côté pendant le vol, ceci peut être lié à des vibrations du mécanisme. En
présence de vibrations à haute fréquences, il peut s’avérer utile d’utiliser les deux pastilles autocollantes en
mousse et d’y intercaler la plaque en métal (voir figure 2, croquis B).
Les câbles raccordés au gyroscope doivent être posés de manière à ne pas pouvoir transmettre les vibrations
mécaniques sur le gyroscope et ce qu’ils ne puissent pas non plus pénétrer dans les pièces rotatives du mécanisme
ou être détruits par des arêtes tranchantes.
Montage du servo arrière
Le montage du servo arrière (7) ainsi que le réglage du rotor
arrière sont normalement précisément définis dans la
documentation du modèle réduit d’hélicoptère.
Attention, important !
Afin d’obtenir un effet optimal du gyroscope, le levier du
servo (8) et la tringle d’asservissement (9) doivent être
positionnés perpendiculairement l’un par rapport à l’autre
(position neutre).
La distance (A) dépend de la taille du modèle réduit, elle est
normalement indiquée dans la documentation fourni avec le modèle
réduit d’hélicoptère.
En l’absence d’indications, veuillez employer les valeurs suivantes :
Pour les servos standards : 12 – 17 mm
Pour les mini ou micro servos : 8 – 15 mm
Veillez également à ce que la commande du rotor arrière soit absolument souple mais sans jeu.
A
1
B
5
Figure 2
Figure 3
75

Branchement du gyroscope
Raccordez le gyroscope à la sortie du récepteur pour le servo
arrière en utilisant le câble de liaison à trois broches (3).
Noir = négatif
Rouge = positif
Blanc = impulsion
Raccordez l’entrée de réglage à 1 broche (jaune = ligne
d’impulsions) du gyroscope (2) à un canal libre du récepteur qui
se règle à l’aide d’un curseur de réglage sur l’émetteur.
L’affectation des sorties à effectuer sur le récepteur
dépend du fabricant de la télécommande, elle est
indiquée dans la documentation fournie avec l’installation
correspondante.
Le servo du rotor arrière (7) se branche directement sur le
connecteur du servo arrière (4). Veillez à la polarité correcte de la
prise servo (8).
8
7
3
4
SERVO
1
QUEC
GU-211
1
3
S
2
GAUI
GYRO
SET
2
Figure 4
Mise en marche du gyroscope
Avant la mise en marche du gyroscope, il est indispensable de désactiver toutes les fonctions de mixage anti-couple
programmées comme par ex. « Revolution-Mixing » ou un mixage à discrimination de gyroscope.
Le gyroscope ne dispose pas de son propre interrupteur de fonctionnement. L’alimentation se fait par la prise à trois broches
qui est reliée au récepteur. Dès que l’installation de réception est mise en marche, le gyroscope est activé.
Le levier de commande pour la fonction arrière tout comme le levier de compensation correspondant doivent toujours se
trouver en position médiane avant de mettre en marche l’installation de réception et le gyroscope. Le rotor arrière doit être
orienté de manière à ce que l’hélicoptère n’ait pas tendance à dériver dans une direction particulière en vol stationnaire
(réglage en usine).
Initialisation du gyroscope
Pour fonctionner correctement, le gyroscope doit être initialisé.
Cet ajustement interne se fait automatiquement après la mise en
marche de l’installation émettrice et dure env. 2 à 3 secondes.
Pendant ce temps, le modèle réduit, et donc aussi le gyroscope,
ne doivent pas être déplacés ou tournés.
Afin de signaliser l’initialisation, la DEL S s’allume d’abord en orange
puis en rouge (mode normal) ou en vert (mode AVCS) en fonction
de l’état de fonctionnement sélectionné. Les DEL 1 à 3 s’allument
d’abord en rouge puis en vert avant de finalement s’éteindre.
Attention !
Comme le gyroscope ne fonctionne correctement que
s’il a préalablement été initialisé en mode AVCS, il est
indispensable de déplacer le curseur de réglage pour la
sensibilité du gyroscope en mode AVCS (Heading Hold)
avant l’initialisation.
S
12
3
SET
Figure 5
76

Indicateurs d’état à DEL
Outre l’initialisation, les DEL signalisent également d’autres états du gyroscope.
La DEL S est allumée en vert
Le gyroscope fonctionne en mode AVCS. Le levier de commande arrière n’est pas actionné.
La DEL S clignote constamment 2 fois de suite en vert
Le gyroscope fonctionne en mode AVCS. Le levier de commande arrière est actionné ou le compensateur a été
déréglé.
La DEL S est allumée en rouge
Le gyroscope fonctionne en mode normal. Le levier de commande arrière n’est pas actionné.
La DEL S clignote constamment 2 fois de suite en rouge
Le gyroscope fonctionne en mode normal. Le levier de commande arrière est actionné ou le compensateur a été
déréglé.
La DEL S clignote constamment lentement en orange
Le gyroscope ne reçoit plus de signaux valides du récepteur.
La DEL S clignote constamment lentement en orange et les DEL 1 à 3 sont allumées en vert
En raison de l’absence du signal du récepteur, le gyroscope n’a pas pu être initialisé.
Réglage du mode de fonctionnement AVCS ou normal et de la sensibilité du
gyroscope
Le mode de fonctionnement ainsi que la sensibilité du gyroscope se règlent à partir de l’émetteur dans la plage comprise de
0 à 100 % de préférence à l’aide d’un curseur de réglage (capteur).
Un réglage de sensibilité de 0% signifie que l’effet stabilisateur du gyroscope est éteint, une valeur de 100% indiquant la
sensibilité gyroscopique la plus élevée. Puis Il suffit ensuite de modifier minimalement la direction du gyroscope pour
corriger amplement les angles de braquage sur le servo raccordé.
A l’aide de l’interrupteur à coulisse (transmetteur) sur l’émetteur
vous ne pouvez pas seulement régler la sensibilité du gyroscope
mais aussi commuter entre les modes de service. Pour cette raison,
la position médiane de l’interrupteur à coulisse (50% de la course
du transmetteur) correspond à une sensibilité gyroscopique de
0%.
En fonction du sens de commande du transmetteur, la sensibilité
du gyroscope est élevée en mode normal ou en mode AVCS.
Les deux positions de fin de course de l’interrupteur à coulisse (à
0% ou 100% de la course du transmetteur) correspondent toujours
à la sensibilité maximale du gyroscope de 100%.
En cas de réglage du capteur entre 0 et 50 %, le gyroscope
fonctionne en mode normal (la DEL S est allumée en rouge) et, en
cas de réglage du capteur entre 50 et 100 %, le gyroscope
fonctionne en mode AVCS (la DEL S est allumée en vert).
Au lieu d’un interrupteur à coulisse vous pouvez également utiliser un interrupteur à bascule pour commuter entre les
différents modes de service. Dans ce cas, vous devez programmer dans l’émetteur les valeurs de réglage nécessaires dans
le menu ATV (réglage de la course des émetteurs de commande).
En liaison avec une commutation de l’état de vol vous pouvez ainsi programmer des valeurs différentes pour la sensibilité du
gyroscope pendant le vol stationnaire, le vol de plaisance et le vol artistique.
100%
50%
0%
LINEAR
100%
50%
0%
100%
50%
AVCS-Modus
0%
50%
Normal-Modus
100%
Figure 6
77

Programmation du gyroscope
Le gyroscope se programme à l’aide de la touche SET et du levier de commande arrière de l’émetteur. Ne faites pas de
longue pause entre les différentes étapes de programmation, le gyroscope risquerait sinon de réagir de manière incorrecte.
En tel cas, débranchez l’alimentation électrique du gyroscope puis remettez-le en service au bout de quelques secondes.
• Pour ce faire, mettez le gyroscope en marche de manière à ce
que la DEL S s’allume en vert.
• Maintenez la touche SET enfoncée pendant env. 3 secondes à
l’aide d’un petit tournevis ou d’un objet similaire.
• Dès que la DEL 1 s’allume, relâchez la touche SET.
• La DEL S passe du vert à l’orange et signalise ainsi le mode de
programmation.
S
1
3
2
SET
3 sec.
Figure 7
Sélection du type de servo
• Le levier de commande arrière permet de commuter la couleur
de la DEL 1 et ainsi de sélectionner le type de servo requis.
Vert = Servo numérique
Rouge = Servo analogique
S
12
3
SET
Modification du sens de rotation du servo arrière
• Appuyez encore une fois sur la touche SET.
• La DEL 1 s’éteint et la DEL 2 s’allume.
• Le levier de commande arrière permet maintenant de commuter
la couleur de la DEL 2 et ainsi de modifier le sens de marche du
servo.
Vert = Sens de marche normal
Rouge = Sens de marche inversé
78
S
12
Figure 8
3
SET
Figure 9

Réglage du débattement maxi du servo
• Appuyez encore une fois sur la touche SET.
• La DEL 2 s’éteint et la DEL 3 s’allume en vert et le levier du
servo arrière se déplace simultanément d’un côté en position
finale.
• Le levier de commande arrière permet maintenant de régler le
débattement maximal du servo de ce côté.
En fonction du sens d’actionnement du levier de commande
arrière, le débattement du servo est augmenté ou réduit.
• Appuyez encore une fois sur la touche SET.
• La DEL 3 s’allume maintenant en rouge et le levier du servo se
déplace de l’autre côté en position finale.
• Le levier de commande arrière permet maintenant de régler le
débattement maximal du servo de ce côté.
S
S
12
12
3
3
SET
Figure 10
SET
• Appuyez encore une fois sur la touche SET.
• Toutes les quatre DEL s’allument en rouge et signalisent ainsi
que les valeurs réglées peuvent maintenant être enregistrées.
En cas d’interruption de l’alimentation électrique, tous les
réglages modifiés préalablement sont effacés.
• Appuyez encore une fois sur la touche SET pour enregistrer les
réglages puis quitter le mode de programmation.
S
12
Figure 11
3
SET
Figure 12
79

Contrôle de la fonction du gyroscope
• Mettez le gyroscope en marche en mode AVCS. Aucun mélangeur arrière ne doit être programmé sur l’émetteur et le
levier de commande pour la fonction arrière ainsi que l’interrupteur coulissant de compensation correspondant doivent se
trouver en position médiane.
• En mode de programmation, réglez le type de servo requis (analogique / numérique) sur le gyroscope.
• Raccordez le servo arrière et fixez le levier du servo perpendiculairement à la tringle d’asservissement.
• Testez le sens de marche pour la commande de la queue. Si le servo fonctionne dans le sens incorrect, inversez le sens de
marche du servo sur l’émetteur.
• Réglez les valeurs de débattement correctes pour le servo arrière sur l’émetteur. La course maximale de commande sur
l’émetteur doit pouvoir être utilisée sans que le levier du servo ne soit limité du point de vue mécanique par la commande
en position maximale. La course maximale du servo ne doit pas alors pas être limitée sur le gyroscope.
• Contrôlez ensuite la direction de l’effet du gyroscope. Lorsque vous tournez l’hélicoptère dans le sens horaire (vu d’en
haut), le gyroscope doit actionner le servo arrière dans la même direction que si vous aviez piloté vers la gauche sur
l’émetteur. Si le servo fonctionne dans le sens incorrect, inversez le sens de marche du servo dans le mode de programmation
du gyroscope.
• Le cas échéant, réglez les débattements max. du servo en mode de programmation sur le gyroscope.
Contrôle du réglage du gyroscope en vol
• Allumez d’abord la télécommande puis le modèle réduit avec le gyroscope.
• Réglez une sensibilité du gyroscope comprise entre 65 et 70 %.
Attention, important !
Si vous portez l’hélicoptère du local de préparation à la zone de décollage et que vous tenez le tube de queue dans
un autre sens, le gyroscope devra impérativement être réinitialisé.
À cet effet, effectuez 4 fois de suite un mouvement rapide de va-et-vient avec le levier de commande arrière sur
l’émetteur. Le servo arrière retourne ensuite en position médiane. Cette opération doit systématiquement être
effectuée avant chaque décollage.
• Lorsque le compensateur était par ex. déréglé lors de l’initialisation, il peut alors à nouveau être déplacé en position
médiane. Effectuer ensuite 3 fois de suite un mouvement rapide de va-et-vient avec le curseur de réglage pour la
sensibilité du gyroscope. Il doit ensuite à nouveau être commuté en mode AVCS. Ceci permet d’enregistrer la position
actuelle du levier (y compris compensateur) comme nouvelle position neutre.
• Démarrez le rotor et augmentez lentement la vitesse de rotation. L’hélicoptère ne doit toutefois pas encore quitter le sol.
• Lorsque le modèle réduit commence à devenir « léger », contrôlez le fonctionnement du rotor de queue.
• Lorsque la commande du rotor de queue fonctionne de manière satisfaisante, laissez l’hélicoptère décoller et contrôlez
l’effet du gyroscope.
Lorsque la queue effectue constamment un mouvement de va-et-vient, le réglage de la sensibilité du gyroscope est trop
élevé. En tel cas, réduisez la sensibilité du gyroscope ou réduisez la distance « A » sur le levier du servo arrière (voir
figure 3).
Lorsque la queue s’éloigne en cas de modifications rapides du pas, la sensibilité du gyroscope est trop faible. En tel cas,
augmentez la sensibilité du gyroscope ou augmentez la distance « A » sur le levier du servo arrière (voir figure 3).
Caractéristiques techniques
Tension de service ............................................... 4,5 - 6,5 V/CC
Consommation de courant env. .............................50 - 100 mA
Connecteurs ........................................................Futaba
Commande analogique / numérique des servos .....50/333 Hz
Position médiane du servo.................................... 1 520 µs
Dimensions ......................................................... 26 x 24 x 9 mm
Poids avec câble de raccordement ........................12 g
80

13. Régulateur de vitesse « GUEC GE-610 »
Avant de mettre en marche le régulateur de la vitesse de rotation, lisez attentivement les remarques pour l’utilisation
et la programmation.
Caractéristiques
• Microprocesseur haute capacité pour une compatibilité et une efficience maximales du moteur
• Vitesse de rotation max. 210 000 tr/min (avec les moteurs bipolaires), 70 000 tr/min (6 pôles), 35 000 tr/min (12 pôles)
• 3 modes de démarrage : normal, souple, très souple pour les entraînements directs ou à transmission
• Plage de gaz pouvant être configurée pour tous les émetteurs disponibles sur le marché
• Admission linéaire et rapide de gaz
• Microprocesseur avec régulateur de tension séparé pour une meilleure suppression des interférences
• Circuit de protection en cas de sous-tension, surchauffe ou perte du signal RC
• Tension BEC commutable de 5,25 et 6 V
• Mode de régulateur de la vitesse de rotation activé pour le modèle réduit d’hélicoptère (mode Governor)
Réglages programmables
Attention, important !
Avant de mettre en marche le régulateur de vitesse, il est toujours indispensable de programmer individuellement
le régulateur en fonction du modèle d’hélicoptère ou d’avion que vous utilisez.
1. Fonction de freinage : arrêt / doux / dur / très dur (réglage standard : arrêt)
2. Type de batterie : lithium (batteries Lilo ou LiPo) / batteries NiMH (réglage standard : lithium)
3. Mode Cutoff : doux = réduction progressive de la puissance de sortie / dur = arrêt immédiat de la puissance de sortie
(réglage standard : doux)
4. Seuil de commutation Cutoff : bas / moyen / élevé (réglage standard : moyen)
Avec les batteries au lithium, les valeurs correspondent à 2,85 V / 3,15 V / 3,30 V par cellule.
Avec les batteries NiMH, les valeurs correspondent à 50 % / 62,5 % / 75 % de la tension de démarrage.
5. Mode de démarrage : normal / doux / très doux (réglage standard : très doux)
Le réglage « Normal » est recommandé pour les modèles réduits d’avion à entraînement direct.
Les réglages « doux » avec un temps de montée en régime de 3 s et « très doux » avec un temps de montée en régime
de 8 s conviennent principalement pour les modèles réduits d’avion avec moteurs à transmission et les modèles réduits
d’hélicoptère.
Lorsque le moteur est éteint après le décollage et que le plein régime est rétabli en l’espace de 3 secondes, le
régulateur commute brièvement de « doux » ou « très doux » sur « normal » afin d’éviter d’endommager le modèle
réduit suite au retardement de l’admission du gaz.
6. Synchronisation : 0° / 3,75° / 7,5 / 11,25° / 15° / 18,75° / 22,5° / 26,25° (réglage standard : 15°)
En général, les valeurs de synchronisation faibles sont suffisantes pour la plupart des moteurs. Étant donné qu’un très
grand nombre de moteurs est disponible sur le marché, il est recommandé de déterminer individuellement la valeur de
synchronisation la mieux adaptée à votre moteur. En général, les valeurs de synchronisation légèrement plus élevées
permettent également d’obtenir une puissance légèrement plus élevée, la consommation de courant et la sollicitation
thermique du moteur, du régulateur et de la batterie sont alors également plus élevées.
7. Mode Governor : arrêt / bas / élevé (réglage standard : arrêt)
Lorsque le mode Governor est activé, le régulateur tente de réguler la vitesse de rotation du moteur à un niveau
constant malgré les sollicitations variées.
Avec le réglage « bas », la plage de vitesse de rotation d’un moteur bipolaire est comprise entre 10 000 et 45 000 tr/
min. Avec le réglage « élevé », la plage de vitesse de rotation d’un moteur bipolaire est comprise entre 46 000 et
200 000 tr/min.
81

Afin de ne pas dépasser la vitesse maximale de l’extrémité des pales, il est recommandé de mesurer la vitesse de
rotation au niveau de la tête de rotor. Le mode Governor est uniquement activé lorsque la position du levier des gaz est
supérieure à 60%.
8. Rubrique 1 non affectée du menu :
9. Fréquence de base : 12 kHz / 8 kHz (réglage standard : 12 kHz)
La fréquence de commande du moteur de 8 kHz convient pour la plupart des moteurs Brushless. Pour les moteurs avec
des spécifications KV élevées et de nombreux pôles, une fréquence de base supérieure permet de garantir un meilleur
fonctionnement. Ceci augmente toutefois également la sollicitation thermique du régulateur.
10. Tension BEC : 5,25 V / 6 V (réglage standard : 5,25 V)
11. Rubrique 2 non affectée du menu :
12. Cellules LiPo : auto / 2S / 3S / 4S / 5S / 6S (réglage standard : auto)
Lors du raccordement de la batterie sur le régulateur de vitesse, plusieurs tonalités retentissent et indiquent ainsi le
nombre de cellules reconnu pour la batterie. En cas d’utilisation de batteries plus anciennes ou plus de plus faible
capacité, des erreurs peuvent survenir lors de la reconnaissance automatique des cellules. En tel cas, nous recommandons
de régler manuellement le nombre de cellules.
Mise en service
1. Réglez le levier de commande des gaz en position basse (arrêt moteur) sur votre télécommande.
2. Raccordez la batterie au régulateur de vitesse. Respectez alors impérativement la polarité des câbles de raccordement :
Rouge = plus (+) et noir = moins (-).
Le régulateur effectue maintenant un test automatique et trois tonalités brèves toujours plus aiguës retentissent afin
de signaliser que la tension disponible se situe dans la plage normale par le biais du moteur raccordé.
2 à 6 tonalités brèves retentissent ensuite en fonction du nombre de cellules.
Pour finir, une tonalité longue signalise la fin du test automatique et l’état de marche du régulateur. Les tonalités sont
accompagnées par le clignotement synchrone des DEL rouge intégrées.
Si le moteur raccordé n’émet aucune tonalité, assurez-vous que le câblage soit correct.
Si le régulateur émet seulement deux tonalités brèves après les 3 tonalités brèves toujours plus aiguës, la position
actuelle du levier de commande des gaz est reconnue comme position plein régime. En tel cas, déplacez le levier
de commande en position correcte ou activez la fonction d’inversion du servo pour le canal des gaz sur l’émetteur.
Lorsque la DEL rouge clignote 2 fois par seconde, la tension de service raccordée du régulateur de vitesse est trop
basse ou trop élevée. En tel cas, contrôlez la batterie raccordée.
3. Comme chaque émetteur comporte des signaux de commande pouvant légèrement varier, il est indispensable d’enregistrer
la course de commande réelle dans le régulateur de vitesse. La procédure exacte est décrite dans la section suivante
« Apprentissage de la course de commande des gaz ».
Tonalités d’alarme
Tension d’entrée hors de la plage admissible :
Durant la marche, le régulateur de vitesse contrôle la tension de service. Lorsque la tension ne se situe pas dans la plage de
tension admissible, le régulateur de vitesse émet un signal d’avertissement par le biais du moteur raccordé. Deux tonalités
retentissent en l’espace d’env. 1 seconde et la DEL rouge clignote au même rythme.
Le signal de l’émetteur n’est pas reconnu :
Lorsque le signal de l’émetteur n’est reconnu durant le fonctionnement, le moteur s’arrête et émet une tonalité brève toutes
les 2 secondes. La DEL rouge clignote au même rythme. Dès qu’un signal valide de l’émetteur est à nouveau reconnu, le
régulateur de vitesse remet en marche le moteur.
Levier de commande des gaz en position incorrecte :
Lorsque le levier de commande des gaz ne se trouve pas en position basse lors de la mise en marche, le moteur raccordé
au régulateur de vitesse émet des tonalités brèves toutes les 0,25 secondes et la DEL rouge clignote au même rythme.
Lorsque le levier de commande est déplacé en position basse, 2 à 6 tonalités brèves sont émises en fonction du nombre de
cellules et l’état de marche est finalement signalisé par une tonalité longue.
82

Fonctions de protection
Problèmes lors du démarrage du moteur :
Lorsque le moteur ne démarre pas en l’espace de 2 secondes après l’accélération, la coupure de protection du régulateur de
vitesse déconnecte le moteur. Pour redémarrer le moteur après le dépannage, le levier de commande doit d’abord être
déplacé en position basse (arrêt moteur).
Une cause possible pour une montée en régime incorrecte du moteur peut être un blocage mécanique du moteur ou de la
transmission ainsi qu’un raccord défectueux entre le moteur et le régulateur de vitesse.
Protection contre la surchauffe :
Si le régulateur de vitesse dépasse la température de service maximale admissible, la puissance de sortie est automatiquement
réduite.
Le signal de l’émetteur n’est pas reconnu :
Lorsque le signal de l’émetteur n’est pas reconnu pendant plus de 0,25 secondes pendant la marche, le moteur s’arrête. Dès
qu’un signal valide de l’émetteur est à nouveau reconnu, le régulateur de vitesse remet en marche le moteur.
Apprentissage de la course de commande des gaz
1. Allumez l’émetteur et contrôlez le réglage de la course des gaz sur la télécommande. La course devrait être égale à
100% dans les deux sens.
2. Déplacez le levier de commande des gaz en position Plein régime puis raccordez la batterie sur le régulateur de vitesse.
3. Le moteur raccordé au régulateur émet 3 tonalités brèves toujours plus aiguës puis deux tonalités brèves au bout de
2 secondes. La position Plein régime a été enregistrée.
4. Déplacez ensuite immédiatement le levier de commande en position basse. En fonction du nombre de cellules, le
moteur émet maintenant 2 à 6 tonalités brèves puis une tonalité longue.
5. Le régulateur de vitesse a maintenant enregistré la course de commande du canal des gaz et est en ordre de marche.
83

Programmation du régulateur de vitesse
1. Activation du mode de programmation
• Allumez l’émetteur puis déplacez le levier de commande des gaz en position Plein régime.
• Raccordez la batterie au régulateur de vitesse. Le moteur raccordé au régulateur émet 3 tonalités brèves toujours
plus aiguës puis deux tonalités brèves au bout de deux secondes.
• Après 5 secondes supplémentaires, le moteur raccordé émet 5 tonalités brèves toujours plus aiguës.
• Le régulateur se trouve maintenant en mode de programmation.
2. Sélection d’une rubrique du menu
• En mode de programmation, vous entendez maintenant 14 groupes de différentes tonalités qui se répètent
constamment en boucle. La DEL rouge clignote au même rythme. L’affectation des tonalités respectives aux différentes
rubriques du menu est indiquée dans le tableau ci-dessous.
N° Séquence Rubrique ou fonction du menu
1 1 brève Fonction de freinage
2 2 brèves Type de batterie
3 3 brèves Mode Cutoff
4 4 brèves Seuil de commutation Cutoff
5 1 longue Mode de démarrage
6 1 longue, 1 brève Synchronisation
7 1 longue, 2 brèves Mode Governor
8 1 longue, 3 brèves Rubrique 1 non affectée du menu
9 1 longue, 4 brèves Fréquence de base
10 2 longues Tension BEC
11 2 longues, 1 brève Rubrique 2 non affectée du menu
12 2 longues, 2 brèves Cellules LiPo
13 3 longues, 1 brève Chargement des réglages standards
14 3 longues, 2 brèves Quitter le mode de programmation
• Pour sélectionner une rubrique précise du menu, déplacez le levier de commande des gaz de la position Plein régime
en position basse (arrêt moteur) dans les 3 secondes qui suivent la séquence correspondante.
• Le régulateur de vitesse bascule ainsi en mode de réglage de la rubrique du menu sélectionnée.
84

3. Modification des valeurs
• En mode de réglage, vous entendez également différentes tonalités (voir ligne du haut dans le tableau ci-dessous)
qui se répètent constamment en boucle. La DEL rouge clignote au même rythme. Le début de la séquence dépend
de la rubrique du menu sélectionnée étant donné que seules les tonalités qui correspondent à une valeur enregistrée
sont émises.
• Après avoir entendu la tonalité pour le réglage souhaité, déplacez immédiatement le levier de commande des gaz de
la position basse (arrêt moteur) en position Plein régime.
• 4 tonalités confirment alors la valeur enregistrée.
• Le régulateur de vitesse retourne en mode de programmation qui permet alors, le cas échéant, de sélectionner et de
régler la rubrique suivante du menu.
1 brève 2 brèves 3 brèves 4 brèves 1 longue 1 longue 1 longue 1 longue
Fonction de freinage Arrêt doux dur très dur
Type de batterie Lithium NiMH
Mode Cutoff doux dur
Seuil de commutation Cutoff bas moyen élevé
Mode de démarrage normal doux très doux
Synchronisation 0° 3,75° 7,5° 11,25° 15° 18,75° 22,5° 26,25°
Mode Governor Arrêt bas élevé
Rubrique 1 non affectée du menu
Fréquence de base 12 kHz 8 kHz
Tension BEC 5,25 V 6 V
Rubrique 2 non affectée du menu
Cellules LiPo Auto 2S 3S 4S 5S 6S
1 brève 2 brèves 3 brèves
Les réglages standards apparaissent sur fond gris dans le tableau
4. Quitter le mode de programmation
• Lorsque le régulateur se trouve en mode de programmation, attendez que la rubrique 14 du menu soit signalisée par
la tonalité correspondante puis déplacez le levier de commande des gaz de la position Plein régime en position basse
(arrêt moteur) dans les 3 secondes qui suivent la tonalité. Vous entendez d’abord 5 tonalités individuelles, le moteur
émet ensuite la séquence pour la mise en service.
• Lorsque le régulateur se trouve en mode de réglage et que vous avez enregistré une nouvelle valeur, tirez à nouveau
le levier de commande des gaz en position basse (arrêt moteur) immédiatement après la séquence de confirmation.
Vous entendez d’abord 5 tonalités individuelles, le moteur émet ensuite la séquence pour la mise en service.
Caractéristiques techniques
Alimentation électrique ................................... 2 à 6 cellules LiPo ou 5 à 18 cellules NiMH
Courant continu .............................................. 100 A
Courant maximal ............................................ 150 A
Puissance de sortie BEC .................................. 5,25 / 6 V, 4 A
Dimensions .................................................... 75 x 35 x 17 mm
Poids ............................................................. 82 g
85

Inhoudsopgave
Pagina
1. Inleiding........................................................................................................................................................ 86
2. Voorgeschreven gebruik ................................................................................................................................. 87
3. Productbeschrijving ....................................................................................................................................... 87
4. Leveringsomvang........................................................................................................................................... 87
5. Veiligheidsvoorschriften.................................................................................................................................. 88
a) Algemeen ................................................................................................................................................. 88
b) Voor de ingebruikname ............................................................................................................................. 88
c) Tijdens het gebruik ................................................................................................................................... 89
6. Voorschriften voor batterijen en accu´s........................................................................................................... 90
7. Algemene voorschriften bij de montage van de mechaniek ............................................................................... 91
8. Montage van de mechaniek ............................................................................................................................ 93
9. Onderhoud en verzorging .............................................................................................................................. 100
10. Afvoer ..........................................................................................................................................................100
a) Algemeen ................................................................................................................................................100
b) Batterijen en accu´s.................................................................................................................................100
11. Technische gegevens ....................................................................................................................................101
12. Heading Lock Gyro „GU 211“ ......................................................................................................................... 102
13. Toerentalregelaar „GUEC GE-610“..................................................................................................................109
1. Inleiding
Geachte klant,
Hartelijk dank voor de aanschaf van dit product.
Dit product voldoet aan de voorwaarden van de nationale en Europese wetgeving.
Volg de instructies van de gebruiksaanwijzing op om deze status van het apparaat te handhaven en een ongevaarlijke
werking te garanderen!
Deze gebruiksaanwijzing hoort bij dit product. Deze bevat belangrijke instructies voor de ingebruikname en
bediening. Let hierop, ook wanneer u dit product aan derden doorgeeft.
Bewaar deze handleiding om haar achteraf te raadplegen!
Alle vermelde bedrijfs- en productnamen zijn handelsmerken van de respectievelijke eigenaren. Alle rechten voorbehouden.
Bij technische vragen kunt u zich wenden tot onze helpdesk.
Voor meer informatie kunt u kijken op www.conrad.nl of www.conrad.be.
86

2. Voorgeschreven gebruik
Bij dit product gaat het om een elektrisch aangedreven modelhelikopter die voor privaat gebruik als modelbouwtoestel en
de daarmee verbonden bedrijfstijden is ontworpen. Voor de besturing van het model moet een voor een modelhelikopter
geschikte afstandsbediening (niet meegeleverd) worden gebruikt.
Een ander gebruik dan hier beschreven kan de beschadiging van het product en de hiermee verbonden gevaren zoals bv.
kortsluiting, brand, elektrische schokken, enz. tot gevolg hebben. de veiligheidsaanwijzingen moeten absoluut worden
opgevolgd!
Het product mag niet vochtig of nat worden.
Het product is niet geschikt voor kinderen onder 14 jaar.
Volg alle veiligheidsinstructies in deze gebruiksaanwijzing op. Deze bevat belangrijke informatie voor het gebruik
van het product.
U alleen bent verantwoordelijk voor een veilige werking van het model!
3. Productbeschrijving
De modelhelikopter wordt als bouwpakket in afzonderlijke onderdelen geleverd en bevat alle onderdelen die voor de
montage van de mechaniek nodig zijn. Naargelang de uitvoering kan de modelhelikoptermechaniek nog verdere onderdelen, zoals aandrijfmotor, regelaar, servo’s en gyroscoop bevatten.
De montage van de mechaniek en het inbouwen van de nodige aandrijf- en afstandsbedieningsonderdelen moeten door de
gebruiker zelf worden uitgevoerd. Daarom vereist dit model voor de ingebruikstelling en het aansluitend gebruik omvangrijke en fundamentele kennis in de omgang met modelhelikopters.
Deze modelhelikopter is niet geschikt voor kinderen en beginners in de modelbouw!
4. Leveringsomvang
• Helikoptermechaniek
• Handboek van de fabrikant met montageschetsen
• Montagehandleiding
87

5. Veiligheidsvoorschriften
Bij beschadigingen veroorzaakt door het niet opvolgen van deze gebruiksaanwijzing vervalt ieder
recht op garantie! Voor vervolgschade die hieruit ontstaat, zijn wij niet aansprakelijk!
Voor materiële schade of persoonlijk letsel, veroorzaakt door ondeskundig gebruik of het niet opvolgen van de veiligheidsaanwijzingen, aanvaarden wij geen aansprakelijkheid! In zulke gevallen
vervalt de garantie.
Gewone slijtage bij het gebruik (vb. versleten tandwielen of servoaandrijvingen) en schade door ongevallen (vb.
gebroken skids of rotorbladen) vallen niet onder de garantie.
Geachte klant: deze veiligheidsvoorschriften hebben niet enkel de bescherming van het product, maar ook de
bescherming van uw gezondheid en die van andere personen tot doel. Lees daarom dit hoofdstuk zeer aandachtig
door voordat u het product gebruikt!
a) Algemeen
Let op, belangrijk!
Bij gebruik van het model kan het tot materiële schade of lichamelijke letsels komen. Houd rekening met het feit
dat u voor het gebruik van het model voldoende verzekerd bent, bijv. via een aansprakelijkheidsverzekering.
Informeer indien u reeds beschikt over een aansprakelijkheidsverzekering voor u het model in bedrijf neemt bij uw
verzekering of het gebruik van het model mee verzekerd is.
Let op: In sommige landen van de EU bestaat een verzekeringsplicht voor alle vliegmodellen.
• Om veiligheids- en keuringsredenen (CE) is het eigenhandig ombouwen en/of wijzigen van het product niet toegestaan.
• Het product is geen speelgoed. Het is niet geschikt voor kinderen onder de 14 jaar.
• Het product mag niet vochtig of nat worden.
• Wend u zich tot een ervaren modelsporter of een modelbouwclub als u nog niet genoeg kennis heeft voor het gebruik van
op afstand bediende modellen.
• U mag het verpakkingsmateriaal niet zomaar laten rondslingeren. Dit is gevaarlijk speelgoed voor kinderen.
b) Voor de ingebruikname
• Houdt u zich bij de ingebruikname van de afstandsbediening strikt aan de door de fabrikant opgegeven volgorde. In regel
moet altijd eerst de zender en aansluitend onmiddellijk daarna de vliegaccu van de helikopter aan de toerentalteller
worden aangesloten.
Als u het model niet met een 2,4 GHz afstandsbediening gebruikt, dient u op te letten dat geen andere zender tegelijk op
hetzelfde afstandsbedieningskanaal wordt gebruikt.
• Controleer de technische veiligheid van uw model en het afstandsbedieningssysteem. Let hierbij op zichtbare beschadi-
gingen, zoals defecte steekverbindingen of beschadigde kabels. Alle bewegende onderdelen van het model moeten
soepel werken en de lagers mogen geen speling vertonen.
• De vliegaccu die voor de werking nodig is en de accu´s die eventueel in de zender geplaatst zijn, moeten volgens de
aanwijzingen van de fabrikant opgeladen worden.
• Vóór elk gebruik moeten de instellingen van de trimming van de zender voor de verschillende stuurrichtingen gecontro-
leerd en indien nodig aangepast worden.
• Kies een deugdelijk terrein voor het gebruik van uw modelhelikopter.
• Voer voor elke ingebruikname in overeenstemming met de fabrikantengegevens een bereiktest van de afstandsbediening
uit.
88

c) Tijdens het gebruik
• Neem geen risico bij het gebruik van het model. Uw eigen veiligheid en die van uw omgeving is afhankelijk van uw
verantwoord gebruik van het model.
• Een verkeerd gebruik van het product kan zware letsels en beschadigingen tot gevolg hebben! Let daarom bij het vliegen
op voldoende veiligheidsafstand t.o.v. personen, dieren en voorwerpen.
• Vlieg nooit rechtstreeks op toeschouwers of op uzelf af.
• U mag het model alleen besturen als uw reactievermogen niet verminderd is. Vermoeidheid of beïnvloeding door alcohol
of medicijnen kunnen verkeerde reacties tot gevolg hebben.
• Zowel de motor, de toerentalregelaar als de vliegaccu kunnen bij gebruik heet worden. Pauzeer daarom 5-10 minuten
vooraleer u de vliegaccu opnieuw oplaadt of met een reserve vliegaccu verder vliegt.
• Laat de afstandsbediening (zender) steeds ingeschakeld zolang het model in gebruik is. Koppel na de landing steeds eerst
de vliegaccu van de toerentalregelaar los. Pas daarna mag de afstandsbediening worden uitgeschakeld.
• Schakel tijdens het gebruik de zender nooit uit zonder vooraf de vliegaccu van de toerentalregelaar te ontkoppelen.
• In geval van een defect of een verkeerde werking moet eerst de oorzaak van de storing verholpen worden voordat u het
model weer start.
• Stel het model en de afstandsbediening niet gedurende langere tijd bloot aan direct zonlicht of grote hitte.
89

6. Voorschriften voor batterijen en accu´s
Het gebruik van batterijen en accu´s is vandaag de dag weliswaar vanzelfsprekend, maar er bestaan toch tal van gevaren
en problemen. Vooral bij LiPo en Li-ion accu´s met hun hoge energie-inhoud (in vergelijking met gewone NiCd of NiMH
accu´s) moeten er diverse voorschriften in acht genomen worden aangezien er anders explosie- en brandgevaar bestaat.
Neem altijd de volgende informatie en veiligheidsvoorschriften in acht bij het gebruik van batterijen en accu´s.
• Houd batterijen/accu´s buiten het bereik van kinderen!
• U mag batterijen/accu´s niet zomaar laten rondslingeren wegens het gevaar dat kinderen of huisdieren ze inslikken. In dit
geval dient u onmiddellijk een arts te raadplegen!
• Zorg dat batterijen/accu´s niet worden kortgesloten, doorboord of in vuur worden geworpen. Er is explosiegevaar!
• Lekkende of beschadigde batterijen/accu´s kunnen bij huidcontact bijtende wonden veroorzaken; draag in dit geval
veiligheidshandschoenen.
• Gewone batterijen mogen niet opgeladen worden. Er bestaat brand- en explosiegevaar! U mag alleen accu´s opladen die
hiervoor geschikt zijn. Gebruik geschikte opladers. Batterijen (1.5V) zijn bestemd voor eenmalig gebruik. Lege batterijen
moeten volgens de geldende wettelijke voorschriften worden ingeleverd.
• Let bij het plaatsen van de batterijen/accu´s resp. bij de aansluiting van een accupack of een laadapparaat op de juiste
polariteit (plus/+ en min/-). Bij een omgekeerde polariteit worden niet alleen de zender, maar ook het vliegmodel en de
accu’s beschadigd. Er bestaat brand- en explosiegevaar!
• Vervang steeds de volledige set batterijen of accu’s. U mag geen volle en halfvolle batterijen of accu´s door elkaar
gebruiken. Gebruik steeds batterijen of accu´s van hetzelfde type en dezelfde fabrikant.
• U mag nooit batterijen en accu´s door elkaar gebruiken! Gebruik ofwel batterijen ofwel accu’s.
• Als u het product langere tijd niet gebruikt (bijv. als u het opbergt), moet u de batterijen (of accu´s) uit de afstandsbediening nemen om beschadigingen door lekkende batterijen/accu´s te voorkomen.
Let op!
Na het vliegen moet u de vliegaccu van de helikopter loskoppelen. Laat de vliegaccu niet op de helikopter aangesloten als u deze niet gebruikt (vb. bij het transport of de opslag). Anders kan de vliegaccu diepontladen worden.
Hierdoor gaat deze kapot en wordt onbruikbaar.
• Laad de accu´s ongeveer om de 3 maanden op, aangezien anders door zelfontlading een zogeheten diepontlading kan
optreden waardoor de accu´s onbruikbaar worden.
• U mag de vliegaccu nooit direct na het gebruik opladen. Laat de accu steeds eerst afkoelen (ten minste 5-10 minuten).
U mag enkel intacte accu´s opladen die niet beschadigd zijn. Als de uitwendige isolatie van de accu beschadigd is of als
deze een andere vorm heeft of bol staat, mag de accu in geen geval opgeladen worden. In dit geval bestaat er een acuut
gevaar voor brand en explosies!
• U mag de omhulling van de vliegaccu nooit beschadigen, de folie niet doorknippen of met scherpe voorwerpen in de accu
prikken. Er bestaat brand- en explosiegevaar!
• Neem de accu voor het opladen uit het model en leg deze op een vuurvaste ondergrond. Zorg voor voldoende afstand
t.o.v. brandbare voorwerpen.
• Laad accu’s altijd met de door de fabrikant aangegeven stroomsterkte op en let daarbij op dat u de toegelaten maximale
waarden niet overschrijdt.
• Omdat zowel het laadapparaat als de accupack warm worden tijdens het opladen, moet er voor voldoende ventilatie
gezorgd worden. Dek het oplaadtoestel en de vliegaccu nooit af! Dit geldt vanzelfsprekend ook voor andere laadapparaten
en andere accu’s.
• U mag accu’s nooit onbewaakt laten tijdens het opladen.
• Koppel de vliegaccu los van het laadapparaat als de accu volledig opgeladen is.
• Laadapparaten en accu’s mogen niet vochtig of nat worden. Er bestaat levensgevaar door een elektrische schok en
bovendien brand- of explosiegevaar door de accu!
90

7. Algemene voorschriften bij de montage van de
mechaniek
Voor u met de montage van de mechaniek begint, moet u zich over enkele belangrijke voorschriften informeren:
• Elke modelhelikopter is slechts zo goed als hij werd gemonteerd. Daarom moet u de montage correct en nauwkeurig
volgens de handleiding uitvoeren. Foutieve of verkeerd gemonteerde modelhelikopters kunnen niet alleen duidelijk slechter
vliegen, maar zijn ook een aanzienlijk veiligheidsrisico.
• Houdt u zich daarom bij de montage nauwkeurig aan de montageschetsen in het handboek van de fabrikant. Let daarbij
ook op dat bepaalde onderdelen met speciale borglak (niet meegeleverd) moeten worden vastgemaakt. Daarom worden
in de verschillende montageschetsen de volgende symbolen gebruikt (zie ook het handboek van de fabrikant pagina 6).
Schroefverbinding met borglak L
L
Veiligheidsschroefverbinding* met borglak L
L
Schroefverbinding met borglak T
T
Veiligheidsschroefverbinding* met borglak T
T
Opbrengen van borglak T
T
Opbrengen van secondenlijm
CA
Opbrengen van smeermiddel
Let op de correcte uitvoering van de montagestap
!
Let in het bijzonder op de correcte uitvoering van de montagestap
!
Het correct opvolgen van de voorschriften in de montageschetsen is van uiterst groot belang voor de werking
en bedrijfszekerheid van het model.
!
* Aangezien de bedrijfszekerheid van deze schroefverbindingen afhankelijk is, dient u in het bijzonder op een vaste
verbinding/schroefverbinding van de bouwonderdelen te letten, zonder daarbij het schroefmateriaal of het bouwonderdeel
te overbelasten.
Als borglak „L“ is bijvoorbeeld „Loctite 221“ van lage sterkte geschikt en als borglak „T“ is „Loctite 243“ van middelmatige
sterkte geschikt.
De praktijk heeft echter altijd al uitgewezen dat het voor alle vast te maken schroefverbindingen nuttig is om een borglak
van middelmatige sterkte te gebruiken. Om in geval van onderhoud met borglak vastgemaakte schroefverbindingen opnieuw
te kunnen losmaken, raden wij het gebruik van vaste borglak af.
91

• Open telkens de verpakking pas wanneer u de onderdelen ook werkelijk voor de overeenkomstige bouwfase nodig hebt.
Leg de afzonderlijke onderdelen daarom in een afzonderlijke onderdeelcontainer (lege vriesdoos, etc.).
• Voer de afzonderlijke montagestappen pas uit wanneer u alle handelingen hebt begrepen en precies weet, waar welk
onderdeel moet worden bevestigd.
• De meegeleverde schroeven hebben verschillende lengtes en koppen. Let op dat u telkens de juiste schroeven monteert.
In geval van twijfel kunt u de schroeven telkens linksboven bij de afbeeldingen op de schetsen op schaal 1:1 leggen en zo
controleren of u de juiste schroeven hebt gekozen.
• Gebruik alleen het in het bouwpakket meegeleverde materiaal en probeer niet om het model met aanvullend en ongeschikt
montagemateriaal te wijzigen. Bij een defect vervangt u de betrokken onderdelen alleen door originele onderdelen uit de
vervangonderdelenlijst.
• Gebruik hoogwaardig montagegereedschap, zoals vb. inbussleutels met nauwkeurig geslepen en geharde
schroefaandrijvingen. Goedkoop gereedschap heeft de neiging om te overdraaien waardoor de schroefkoppen worden
beschadigd.
• Monteer de modelhelikopter op een geschikte ondergrond (zachte wollen doek, etc.) om de mechaniek tegen krassen en
beschadigingen te beschermen.
92

8. Montage van de mechaniek
Neem het handboek van de fabrikant met de montageschetsen en begin met de montage van de modelhelikopter in
overeenstemming met de tekeningen vanaf pagina 7.
Pagina 7
Bovenste afbeelding:
Monteer eerst de houder voor het staartroer (# B) en schroef aansluitend de beide chassisplaten overeenkomstig de
tekening. Houd rekening met het feit dat beide chassisplaten verschillend zijn en de schroeven van verschillende lengte zijn.
Gebruik bij elke schroefverbinding borglak.
Beide M3x18 schroeven worden pas na de inbouw van het staartroer (zie pagina 13, onderste afbeelding) vast aangespannen.
Onderste afbeelding:
Monteer het landingsgestel in overeenstemming met de afbeelding. De skids moeten daarbij in de vliegrichting naar voro
zijn afgesteld (zie ook pagina 9). Gebruik daartoe drie chassisplatenverbinders die in de verticale boring voor de schroeven
M3x16 en de schroef M3x10 maar een boring en geen schroefverbinding tonen.
Beide schroeven M3x16 en de schroef M3x10 worden pas na het plaatsen, afstellen en vastschroeven van het chassis met
het landingsgestel (zie volgende afbeelding) vast aangespannen.
Pagina 8
Bovenste afbeelding:
Plaats het chassis op het landingsgestel en schroef de eenheid vast. Gebruik bij elke schroefverbinding borglak. De
chassisplatenverbinders vooraan en achteraan moeten in het midden een schroefverbinding voor de M3x6 schroeven met
verzonken kop vertonen. De voorste en achterste chassisplaat moet daarbij zodanig worden gedraaid dat de schroeven met
verzonken kop op de oppervlakte aansluiten.
Onderste afbeelding:
Plaats de hoofdaandrijving samen met de afstandsschijf 8x13x2 in de mechaniek en schuif de rotoras van bovenaf in de
mechaniek. De boring met de kleine afstand tot het asuiteinde moet daarbij naar beneden naar de hoofdaandrijving wijzen.
Nadat u met de schroef M3x16 de rotoras met de hoofdaandrijving hebt verbonden, schuift u de klemschroef van bovenaf
op de rotoras. Maak de klemschroef met twee stifttappen M3x3 vast. De rotoras mag geen verticale speling in de mechaniek
vertonen.
Pagina 9
Bovenste afbeelding:
Monteer met behulp van de schroeven M2,6x10 de drie tuimelschijfservo’s en de staartservo overeenkomstig afbeeldingen
1 tot 3 op de daarvoor voorziene plaatsen.
Belangrijk!
Als uw modelhelikopter al met servo’s werd geleverd, moet u letten op de precieze typebeschrijvingen van de
servo’s. Voor de tuimelschijf moeten drie gelijke servo’s (vb. GS 501) worden gebruikt, waarbij voor de staartaansturing een snellere servo (vb. GS 502) nodig is. Om de kabels op een schone manier te leggen beschikt het
chassis over gleuven waardoor kabelbinders kunnen worden getrokken.
Onderste afbeelding:
De staartgyroscoop kan boven de staartroerbevestiging worden gemonteerd. Achteraan de chassisbodemplaat kunnen de
ontvanger en vooraan de toerentalregelaar worden gemonteerd.
93

Pagina 10
Bovenste afbeelding:
Plaats de motordrager op de motor en draai de vier schroeven (2 x M3x6 en 2x M3x10) maar zodanig vast dat de motor op
de drager nog kan worden verschoven. Monteer aansluitend het motorrondsel op de motoras en maak het rondsel met twee
stifttappen M3x3 vast. De positie van het rondsel op de motoras moet zodanig worden gekozen dat het later noch bovenaan
noch onderaan het hoofdtandwiel uitsteekt.
Onderste afbeelding:
Plaats de motor in overeenstemming met de schets in het chassis en schroef de motordrager met zes schroeven M3x6 aan
het chassis vast. Aan beide zijden worden telkens twee cilinderkopschroeven en aan de bovenzijde twee schroeven met
verzonken kop gebruikt.
Om de tandflankspeling in te stellen, schuift u een smal strookje papier tussen het motorrondsel en het aandrijvingstandwiel
en drukt u de motor in de richting van de aandrijving en schroeft u hem van onderaf aan de motordrager vast. Aansluitend
wordt het strookje papier opnieuw verwijderd.
Bij een correcte instelling grijpen beide tandwielen vast in elkaar zonder daarbij vast te klemmen of teveel speling te
vertonen.
Tip uit de praktijk:
Aangezien niet alle vier motorbevestigingsschroeven in de ingebouwde toestand kunnen worden bereikt, is het
aangewezen om de motordrager met de motor slechts in de mechaniek vast te maken.
Na het instellen van de tandflankspeling volstaat het om de motor alleen met de van onderaf bereikbare schroeven
vast te maken. Aansluitend wordt de motordrager met de motor opnieuw verwijderd en worden alle vier de
motorschroeven vast aangespannen. Tot slot kan de motordrager opnieuw in de mechaniek worden geplaatst en
worden vastgeschroefd.
De aansluitleidingen van de motor worden aan de buitenzijde van het chassis naar onder tot de toerentalteller gevoerd en
daar aangesloten.
Pagina 11
Bovenste afbeelding:
Schuif eerst de tuimelschijf en het centrale stuk met beide pitchcompensatorhendels overeenkomstig de afbeelding op de
rotoras. Verbind de pitchcompensatorhendels met de tuimelschijf en plaats aansluitend de rotorkop. Het centrale stuk van
de peddelstangen is reeds af fabriek voorgemonteerd. De verbindingsbouten “A” moeten in de buitenste
schroefverbindingsboringen worden bevestigd.
De rotorkop werd af fabriek van zachte demperrubbers (zwart) voorzien. Voor een hardere rotorkopafstelling
werden nog rode dempergummi’s met de rotorkop meegeleverd.
Onderste afbeelding:
Maak beide stabilisatorstang-koppelingsstangen overeenkomstig de tekening linksonder in de afbeelding klaar. Na de montage van de stabilisatorstang (zie ook pagina 12 bovenste afbeelding) stelt u de stabilisatorstang zo af dat ze aan beide
zijden van de stang evenver uitsteekt (zie schets onderaan de afbeelding)
Pagina 12
Bovenste afbeelding:
Draai de peddel op de peddelstang en stel de peddel nauwkeurig af. De peddels moeten zich telkens op een afstand van
135 mm t.o.v. de stabilisatorstang bevinden (zie schets onderaan de tekening) en horizontaal t.o.v. van de stabilisatorstang
zijn afgesteld (zie schets linksboven).
Onderste afbeelding:
Schuif de aandrijfriemen voor de staartrotor in het staartroer en monteer de staartrotorbehuizing met de staartrotoras
overeenkomstig de afbeelding.
Belangrijk!
Let absoluut op de verschillende schroeflengtes.
94

Pagina 13
Bovenste afbeelding:
De voorgemonteerde staartrotor wordt samen met de schuifhuls overeenkomstig de schets op de staartrotoras geschoven
en met twee stifttappen M3x3 bevestigd.
Let daarbij op dat beide stifttappen telkens in de buitenste verdiepingen van de staartrotoras grijpen.
Controleer de werking van de staartrotoraansturing nadat de staartrotoreenheid is voltooid. Alle onderdelen moeten vlot
werken, maar er mag geen speling in de houder zijn.
Belangrijk!
Trek de schroeven van de staartrotorbladen slechts zodanig aan dat de rotorbladen zich tijdens het vliegen nog
180° tegenover elkaar kunnen afstellen.
Onderste afbeelding:
Schuif het staartroer voorzichtig van achter op de mechaniek. Let daarbij op dat de aandrijfriem overeenkomstig de bovenste schets wordt gedraaid.
Nadat de riem op het voorste aandrijfwiel werd gelegd, trekt u het staartroer opnieuw terug. Let hierbij op de correcte
riemspanning. Span daarom de riem maar zodanig aan dat de hele staartrotoraandrijving nog vlot werkt.
Wanneer het staartroer optimaal past en het verticaal staatvlak verticaal is afgesteld, spant u beide chassisschroeven
M3x18 (zie pagina 7 bovenste afbeelding) en de schroeven aan beide staartrotorsteunen vast aan. Verbind de staartrotorstang
met de staartrotorservo (zie ook pagina 17 onderste afbeelding).
Pagina 14
Bovenste afbeelding:
Monteer de rotorkop- en tuimelschijfaansturingen in overeenstemming met de schetsen en plaats de stang.
Belangrijke aanwijzing!
Aangezien elektrische aandrijvingen met hoog vermogen heel gevaarlijk kunnen zijn, raden wij u aan de motor
altijd van de regelaar te ontkoppelen tijdens onderhouds- en afstelwerkzaamheden. Zo kan een ongewild aanlopen van de mechaniek worden vermeden.
Nadat u de servohendel hebt gemonteerd, roept u op de afstandsbedieningszender een helikopterprogramma op met een
3-punts 120° tuimelschijfaansturing (HR -3).
Stel de juiste looprichting en middelste stand van de servo in. De drie servohendels van de tuimelschijvenservo’s moeten
dan precies op één lijn horizontaal tegenover elkaar zijn afgesteld (zie kleine schets) wanneer de pitch-stuurknuppel zich in
de middelste stand bevindt.
Onderste afbeelding:
De montage van de tuimelschijfvoering en de rotorbladen sluiten de montage van de mechaniek af. Let bij de montage van
de tuimelschijfvoering op dat de zijde met de geringe hoogte van de voeringsgleuven in de vliegrichting naar voor wordt
gemonteerd.
De rotorbladschroeven mogen slechts zodanig worden aangespannen dat de rotorbladen tijdens het vliegen nog 180°
tegenover elkaar kunnen worden afgesteld.
95

Pagina 15
Controleren van de stuurrichtingen:
Bovenste afbeelding:
De afbeelding toont de hoogtesturing van de modelhelikopter, waarbij de knuppelbewegingen bij afstandsbedieningen
telkens in mode I en mode II zijn weergegeven.
Als de hellingshoek van de rotorbladen voor het stijgen moet worden vergroot, moet de tuimelschijf op de hoofdrotoras van
de servo’s naar boven worden verschoven. Let daarbij op dat de tuimelschijf bij de verticale bewegingen altijd horizontaal
blijft en niet opzij kantelt.
Middelste afbeelding:
De afbeelding toont de richtingssturing van de modelhelikopter. De tuimelschijf moet daartoe altijd in de richting kantelen
waarin werd gestuurd. Let daarbij op dat de tuimelschijf naar rechts en links dezelfde hellingshoek vertoont. De hellingshoek naar voor en achter moet eveneens gelijk zijn.
Onderste afbeelding:
De afbeelding toont de staartsturing van de modelhelikopter. Als de afstandsbediening naar rechts wordt gestuurd, moet de
schuifhuls van de staartrotoraansturing op de staartrotoras in de richting van de aandrijfbehuizing worden geschoven. Als
dit niet het geval is, wijzigt u de looprichting van de staartservo op de zender.
Controleer in dit verband ook de bedrijfsrichting van de gyroscoop. Als de romptip van de helikopter van bovenaf gezien
tegen de richting van de wijzers van de klok naar links wordt gedraaid, moet de schuifhuls door de gyroscoop ook in de
richting van de aandrijfsbehuizing worden geschoven. Als dit niet het geval is, wijzigt u de looprichting van de staartservo
op de gyroscoop. Aansluitend stelt u op de gyroscoop nog de maximale uitslagen van de staartservo in.
Pagina 16
Bovenste afbeelding:
De afbeelding toont de schematische weergave van een gas- (throttle) en pitchcurve voor een normale vlucht (Normal
Flight) en voor een extreme acrobatische vlucht (Freestyle/Aggressive).
Let op dat u deze waarden alleen als ondersteuning voor uw persoonlijke instellingen beschouwt, die u tijdens de vluchten
moet bepalen.
Onderste afbeelding:
Voor u met een pitch-schaal de bladhellingshoek meet, controleert u of de tuimelschijf, pitchcompensatorhendel en bladhouder-koppelingsstang parallel ten opzichte van elkaar zijn afgesteld. De rotorhellingshoek moet daarbij 0° bedragen.
Wanneer u de stuurknuppel voor de pitchfunctie (bij een normale vlucht) helemaal naar beneden beweegt, moet u een
hellingshoek van -2° tot -3° aan de rotorbladen kunnen meten. Als de stuurknuppel helemaal naar boven beweegt, moeten
de rotorbladen een hellingshoek van 13° bereiken. De maximale negatieve pitchhoek (bij het acrobatisch vliegen) bedraagt
-13°.
De collectieve pitchhoek bedraagt max. +/- 13° en de cyclische pitchhoek 10°.
96

Pagina 17
Controles voor de start
Bovenste afbeelding:
Voor u het model in gebruik neemt, controleert u de volgende punten:
1. Controleer alle schroefverbindingen op hun vaste zitting.
2. Controleer de tandflankspeling tussen het motorrondsel en het hoofdtandwiel. De tandwielen moeten vast in elkaar
grijpen en de transmissie moet toch vlot lopen.
3. Controleer de aandrijving van de staartrotor. Alle mechanische onderdelen van de staartrotoraandrijving moeten
betrouwbaar en vlot werken.
4. Controleer de correcte en zekere zitting van de elektrische onderdelen en de aandrijfaccu. Let daarbij op de nodige
afstand van de aandrijfaccu tot de elektromotor. Deze moet 5 tot 10 mm bedragen.
5. Zorg dat de aandrijfaccu stevig op vast zit. Gebruik bovenop de accubevestigingslussen nog zelfklevende klittenband.
De klittenband met de haakjes op de accu en het wolachtige deel van de klittenband op de accu kleven.
6. Controleer of de rotorbladen correct zijn gebalanceerd. Let bovendien tijdens de eerste vluchten op een correct
spoorloop en stel deze indien nodig af.
7. Controleer alle assen en kogellagers op hun vlotte en correcte loop.
8. Controleer de volledige bekabeling. Let daarbij in het bijzonder op de verbindingen tussen toerentalteller en motor.
Onderste afbeelding:
9. Controleer de positie van de staartservo en -rotor. In de basispositie moet de servohendel zich in een hoek van 90°
t.o.v. de koppeling bevinden (zie afbeelding 1-4). De koppelingsstang van de staartrotorschuifhuls moet zich dan
eveneens in een hoek van 90° tegenover de staartrotoras bevinden (zie afbeelding 1-5).
10. Controleer of de staartrotorkoppeling vlot functioneert (afbeelding 1-6 en 1-7).
11. Nadat u de zender hebt ingeschakeld en de vliegaccu aangesloten, controleert u de correcte bewegingsrichting van de
tuimelschijvenservo’s en de staartrotor. Wanneer u de helikopter tegen de richting van de wijzers van de klok rond de
rotoras draait, moet de gyroscoop de schuifhuls van de staartrotorkoppeling in de richting van de transmissiebehuizing
bewegen.
Pagina 18
Controles na elke vlucht
Onmiddellijk na de vlucht moeten de volgende punten worden gecontroleerd:
1. Controleer alle schroefverbindingen op hun vaste zitting (zie ook pagina 16).
2. Controleer de tandflankspeling tussen het motorrondsel en het hoofdtandwiel. Let daarbij in het bijzonder op abnormale slijtage of defecte tanden.
3. Controleer de aandrijftransmissie van de staartrotor (zie ook pagina 16).
4. Controleer de correcte en zekere zitting van de elektrische onderdelen (zie ook pagina 16).
5. Controleer alle assen en kogellagers op hun vlotte en correcte loop (zie ook pagina 16).
6. Controleer de temperatuur van motor, accu en toerentalregelaar.
Belangrijk!
Laat de motor en toerentalregelaar eerst opnieuw tot de omgevingstemperatuur afkoelen voor u met een reeds
opgeladen reservevliegaccu opnieuw start.
97

Grondig onderhoud
1. Controleer of schroeven zijn losgekomen of bouwonderdelen niet meer zijn vastgeschroefd.
2. Controleer de tandflankspeling tussen het motorrondsel en het hoofdtandwiel. Let daarbij in het bijzonder of de motor
is losgekomen en zo de tanden van beide tandwielen niet meer goed in elkaar grijpen.
3. Controleer de tandflankspeling op de staartrotoraandrijving. De tandwielen moeten stevig in elkaar grijpen en toch vlot
lopen.
4. Let daarbij op dat de verschillende assen zuiver lopen. Zelfs wanneer de rotorbladen maar licht in aanraking met de
grond komen, kan dit tot aanzienlijke vervormingen van de assen leiden.
5. Controleer alle kogellagers op hun zuivere loop. Lagers, die bij het manipuleren met de hand een „rollend“ of „knarsend“
gevoel geven, moeten net zoals zichtbaar beschadigde kogellagers onmiddellijk worden vervangen.
6. Controleer de hulppeddel. De peddels moeten altijd nauwkeurig zijn afgesteld (zie pagina 12 bovenste afbeelding en
de stabilisatorstang mag niet zijn gebogen).
Pagina 19
Bovenste afbeelding:
De afbeelding toont de uitbouw van de hoofdrotoras. De afzonderlijke arbeidsstappen zijn op de tekening van nummers
voorzien.
1. Verwijder de schroeven van de tuimelschijfvoering #208876 en neem de tuimelschijfvoering af.
2. Klik de drie koppelingsstangen voor de tuimelschijf #208401 aan de servohendels.
3. Verwijder de rotorasschroef #208864 op de hoofdaandrijving.
4. Maak de stifttap #208865 aan de rotorasklemschroef los.
5. Trek de rotoras samen met de rotorkop naar boven uit de mechaniek.
6. Verwijder rotorkopschroef #208864 en trek de rotorkop van de as af.
Onderste afbeelding:
De afbeelding toont de demontage van de hoofdaandrijving. De afzonderlijke arbeidsstappen zijn op de tekening van
nummers voorzien.
1. Verwijder eerst de hoofdrotoras (zie boven).
2. Verwijder de borgring #208368 aan de onderkant van de hoofdaandrijving.
3. Verwijder de drie schroeven #208855 en verwijder het middelste stuk #208360.
4. Verwijder de afstandsschijf #208883.
5. Na het verwijderen van de schroeven #208858 kan het bodemstuk #208358 en de vrijloop worden verwijderd.
Let op!
Om de vrijloop later opnieuw correct te kunnen terugplaatsen, raden wij u aan de onderste zijde met een viltstift
te markeren. Bij het monteren moet het middelste stuk #208360 overeenkomstig de tekening worden geolied.
98

Pagina 20
Bovenste afbeelding:
De afbeelding toont de schematische opbouw van de rotorkop. Met de rubberen ringen #208902 (75°) of #208912 (90°)
kan de demping van de rotorkop (zacht of hard) worden beïnvloed. De afzonderlijke arbeidsstappen voor het demonteren
zijn op de tekening van nummers voorzien.
Belangrijk!
Let op dat de binnenste lagerschijf van de axiale kogellager in de hoofdrotorbladhouder een grotere boring heeft
(zie schets rechtsboven).
Onderste afbeelding:
De afbeelding toont de schematische opbouw van de staartrotor. De afzonderlijke arbeidsstappen voor het demonteren zijn
op de tekening van nummers voorzien.
Pagina 21 - 29
Op pagina’s 21 tot 28 vindt u de explosietekeningen van de afzonderlijke bouwcomponenten met de daarbij horende
vervangonderdeelomschrijvingen en -nummers.
Let op!
Denk eraan dat de 6-cijferige nummers in het handboek van de fabrikant geen Conrad-bestelnummers zijn!
Een actuele lijst met vervangonderdelen met de overeenkomstige Conrad Electronic-bestelnummers vindt u telkens
bij de overeenkomstige modelhelikopter in het download-bereik op www.conrad.com.
99

9. Onderhoud en verzorging
Om de bedrijfszekerheid van uw modelhelikopter te waarborgen, moeten regelmatige controles en onderhoudswerken
worden uitgevoerd (zie handboek van de fabrikant/montagehandleiding pagina’s 17 en 18).
Belangrijk!
Indien u beschadigde of versleten onderdelen moet vernieuwen, gebruik dan voor uw helikopter alleen originele
vervangonderdelen.
De reserveonderdelenlijst vindt u op de internetpagina www.conrad.com in het downloadgedeelte van het betreffende
product.
U kunt de reserveonderdelenlijst ook telefonisch aanvragen. De contactgegevens vindt u aan het begin van deze
gebruiksaanwijzing in het hoofdstuk „Inleiding“.
10. Afvoer
a) Algemeen
Verwijder het onbruikbaar geworden product volgens de geldende wettelijke voorschriften.
b) Batterijen en accu´s
U bent als eindverbruiker volgens de KCA-voorschriften wettelijk verplicht alle lege batterijen en accu’s in te leveren;
verwijdering via het huisvuil is niet toegestaan!
Batterijen/accu´s die schadelijke stoffen bevatten, zijn gemarkeerd met nevenstaand symbool. Deze mogen niet
Lege batterijen en niet meer oplaadbare accu´s kunt u gratis inleveren bij de verzamelplaatsen van uw gemeente, onze
filialen of andere verkooppunten van batterijen en accu´s.
Zo voldoet u aan de wettelijke verplichtingen voor afvalscheiding en draagt u bij aan de bescherming van het milieu.
via het huisvuil worden afgevoerd. De aanduidingen voor irriterend werkende, zware metalen zijn: Cd=cadmium,
Hg=kwik, Pb=lood (betekenis staat op de batterij/accu, bijv. onder de hiernaast afgebeelde containersymbolen).
100
 Loading...
Loading...