

Model 5080
GAUSS / TESLA METER
Instruction Manual
Manual UN-01-231
Rev. F, ECO 13095
Item No. 359926
Sypris Test & Measurement
All rights reserved.
This symbol appears on the instrument and probe. It
refers the operator to additional information
contained in this instruction manual, also identified
by the same symbol.
NOTICE:
See Pages 3-1 and 3-2
for SAFETY
instructions prior to first use !

Table of Contents
SECTION-1 INTRODUCTION
Understanding Flux Density.............................................. 1-1
Measurement of Flux Density............................................ 1-2
Product Description........................................................... 1-5
Applications....................................................................... 1-6
SECTION-2 SPECIFICATIONS
Instrument......................................................................... 2-1
Standard Transverse Probe.............................................. 2-5
Standard Axial Probe........................................................ 2-6
Optional Probe Extension Cable....................................... 2-7
Zero Flux Chamber............................................................ 2-8
SECTION-3 OPERATING INSTRUCTIONS
Operator Safety................................................................. 3-1
Operating Features........................................................... 3-3
Instrument Preparation...................................................... 3-6
Power-Up.......................................................................... 3-8
Power-Up Settings............................................................ 3-9
Low Battery Condition....................................................... 3-10
Overrange Condition......................................................... 3-11
AC or DC Measurement Selection..................................... 3-12
UNITS of Measurement Selection..................................... 3-13
RANGE Selection.............................................................. 3-14
HOLD Mode Selection....................................................... 3-16
MIN / MAX Hold Usage...................................................... 3-17
Peak Hold Usage.............................................................. 3-18
ZERO Function.................................................................. 3-20
Automatic ZERO Function................................................. 3-21
Manual ZERO Function..................................................... 3-23
RELATIVE Mode............................................................... 3-25
Automatic RELATIVE Mode.............................................. 3-28
i

Manual RELATIVE Mode................................................... 3-30
ANALOG OUTPUT Function............................................. 3-31
Analog Output Usage........................................................ 3-33
Sources of Measurement Errors........................................ 3-35
More details on AC Mode Operation................................. 3-38
More details on DC Mode Operation................................. 3-40
SECTION-4 REMOTE OPERATION
RS-232 Interface Parameters............................................
RS-232 Interface Connection............................................ 4-1
Remote Command Standards........................................... 4-3
Command Format.............................................................. 4-4
Message Terminators........................................................ 4-4
Error Buffer........................................................................
Status Registers................................................................ 4-5
Status Byte and Request For Service (RQS).................... 4-6
Standard Event Register................................................... 4-9
Measurement Event Register............................................ 4-10
Operation Event Register.................................................. 4-10
Questionable Event Register............................................. 4-11
“Common” Command Syntax............................................ 4-11
“Common” Commands………........................................... 4-13
SCPI Command Syntax..................................................... 4-16
SCPI Commands............................................................... 4-18
Error Messages and Commands....................................... 4-21
Status Commands............................................................. 4-23
MODE Commands............................................................ 4-25
RANGE Commands.......................................................... 4-26
HOLD Commands............................................................. 4-27
ZERO Command............................................................... 4-28
RELATIVE Commands...................................................... 4-28
MEASUREMENT Command............................................. 4-29
ANALOG OUTPUT Command.......................................... 4-30
Intermixing Common and SCPI commands....................... 4-31
Using Query Commands................................................... 4-31
4-1
4-5
ii

Using the Operation Complete Status............................... 4-32
Example Program.............................................................. 4-33
WARRANTY....................................................................
5-1
List of Tables
Table 4-1 Common Command Summary.................. 4-13
Table 4-2 SCPI Command Summary........................ 4-18
List of Illustrations
Figure 1-1 Flux Lines of a Permanent Magnet............ 1-1
Figure 1-2 Hall Generator............................................
Figure 1-3 Hall Probe Configurations.......................... 1-4
Figure 2-1 Standard Transverse Probe....................... 2-5
Figure 2-2 Standard Axial Probe................................. 2-6
Figure 2-3 Optional Probe Extension Cable................ 2-7
Figure 2-4 Zero Flux Chamber.................................... 2-8
Figure 3-1 Auxiliary Power Connector Warnings.........
Figure 3-2 Probe Electrical Warning........................... 3-2
Figure 3-3 Operating Features.................................... 3-3
Figure 3-4 Battery Installation..................................... 3-6
Figure 3-5 Probe Connection...................................... 3-7
Figure 3-6 Power-Up Display...................................... 3-8
Figure 3-7 Missing Probe Indication............................ 3-9
Figure 3-8 Low Battery Indication................................ 3-11
Figure 3-9 Overrange Indication ................................. 3-11
Figure 3-10 MODE (AC-DC) Function........................... 3-12
Figure 3-11 UNITS Function.......................................... 3-13
Figure 3-12 RANGE Function....................................... 3-15
1-3
3-1
iii

Figure 3-13 HOLD Function.......................................... 3-17
Figure 3-14 Automatic ZERO Function......................... 3-22
Figure 3-15 Manual ZERO Function.............................. 3-24
Figure 3-16 RELATIVE Function................................... 3-28
Figure 3-17 Automatic RELATIVE Function................ 3-29
Figure 3-18 Manual RELATIVE Function...................... 3-31
Figure 3-19 OUTPUT Function...................................... 3-32
Figure 3-20 LO and HI Analog Output Displays............ 3-34
Figure 3-21 Adjusting the DC Offset of the Analog
Output........................................................
3-35
Figure 3-22 Probe Output versus Flux Angle................ 3-36
Figure 3-23 Probe Output versus Distance................... 3-37
Figure 3-24 Flux Density Variations in a Magnet........... 3-37
Figure 3-25 Low AC Signal Indication........................... 3-39
Figure 4-1 9-Pin Interface Connector.......................... 4-2
Figure 4-2 Serial Port Connection Schemes............... 4-3
Figure 4-3 Condition, Event and Enable registers.......
Figure 4-4 Status Byte and Enable registers...............
4-6
4-7
Figure 4-5 Standard Event register............................. 4-9
Figure 4-6 Measurement Event register...................... 4-10
Figure 4-7 Operation Event register............................ 4-10
Figure 4-8 Questionable Event register....................... 4-11
iv
Section 1
Introduction
UNDERSTANDING FLUX DENSITY
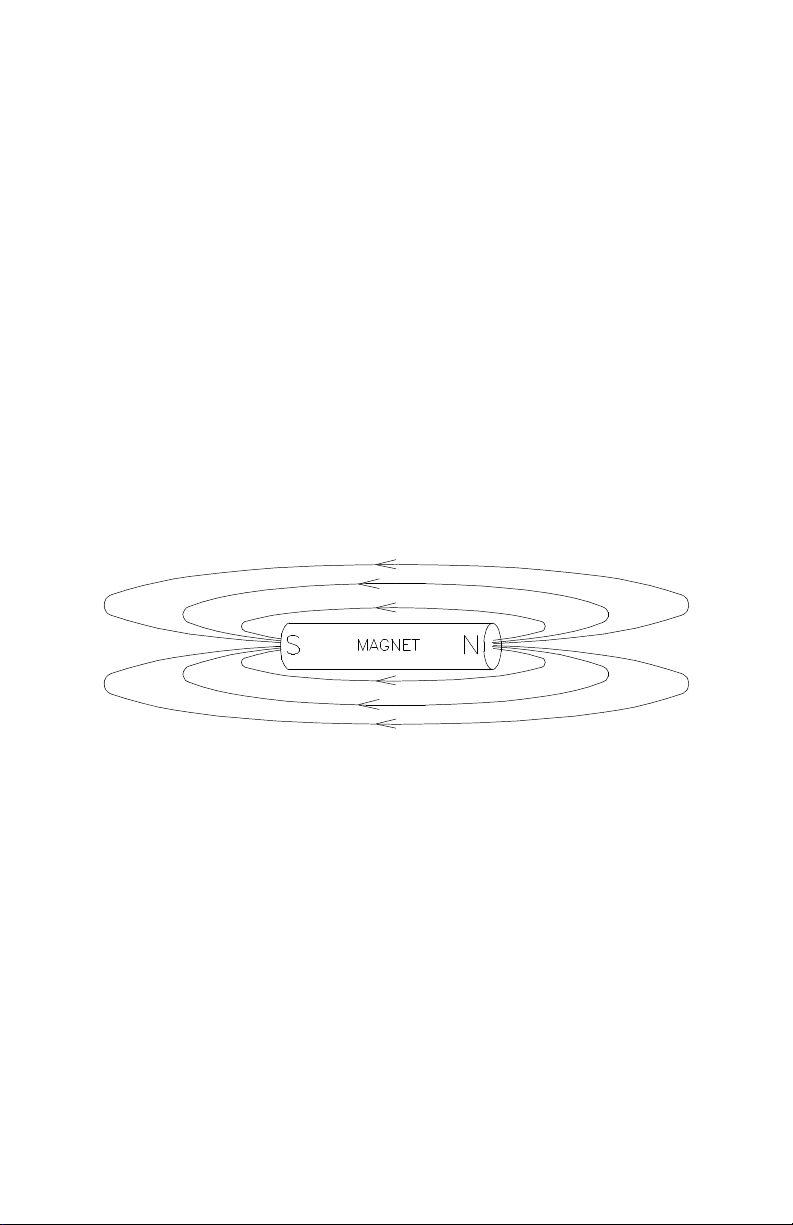
Magnetic fields surrounding permanent magnets or electrical
conductors can be visualized as a collection of magnetic flux
lines; lines of force existing in the material that is being subjected
to a magnetizing influence. Unlike light, which travels away from
its source indefinitely, magnetic flux lines must eventually return
to the source. Thus all magnetic sources are said to have two
poles. Flux lines are said to emanate from the “north” pole and
return to the “south” pole, as depicted in Figure 1-1.
Figure 1-1
Flux Lines of a Permanent Magnet
One line of flux in the CGS measurement system is called a
maxwell (M), but the weber (W), which is 108 lines, is more
commonly used.
Flux density, also called magnetic induction, is the number of flux
lines passing through a given area. It is commonly assigned the
symbol “B” in scientific documents. In the CGS system a gauss
(G) is one line of flux passing through a 1 cm2 area. The more
1-1
INTRODUCTION
commonly used term is the tesla (T), which is 10,000 lines per
cm2 . Thus
1 tesla = 10,000 gauss
1 gauss = 0.0001 tesla
Magnetic field strength is a measure of force produced by an
electric current or a permanent magnet. It is the ability to induce
a magnetic field “B”. It is commonly assigned the symbol “H” in
scientific documents. The unit of “H” in the CGS system is an
oersted (Oe), but the ampere-meter (Am) is more commonly
used. The relationship is
1 oersted = 79.6 ampere-meter
1 ampere-meter = 0.01256 oersted
It is important to know that magnetic field strength and magnetic
flux density are not the same. Magnetic field strength deals with
the physical characteristics of magnetic materials whereas flux
density does not. The only time the two are considered equal is
in free space (air). Only in free space is the following relationship
true:
1 G = 1 Oe = 0.0001 T = 79.6 Am
MEASUREMENT OF FLUX DENSITY
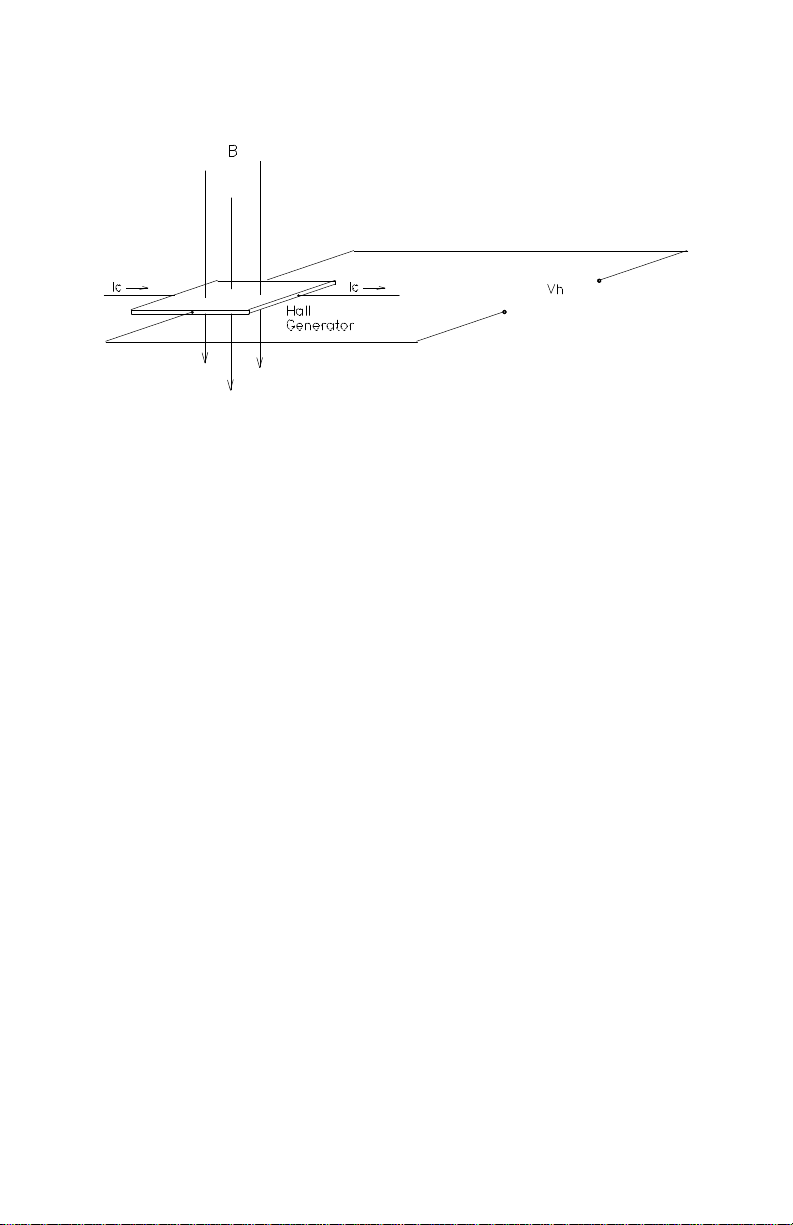
A device commonly used to measure flux density is the Hall
generator. A Hall generator is a thin slice of a semiconductor
material to which four leads are attached at the midpoint of each
edge, as shown in Figure 1-2.
1-2
INTRODUCTION
Figure 1-2
Hall Generator
A constant current (Ic) is forced through the material. In a zero
magnetic field there is no voltage difference between the other
two edges. When flux lines pass through the material the path of
the current bends closer to one edge, creating a voltage
difference known as the Hall voltage (Vh). In an ideal Hall
generator there is a linear relationship between the number of
flux lines passing through the material (flux density) and the Hall
voltage.
The Hall voltage is also a function of the direction in which the
flux lines pass through the material, producing a positive voltage
in one direction and a negative voltage in the other. If the same
number of flux lines pass through the material in either direction,
the net result is zero volts. This sensitivity to flux direction makes
it possible to measure both static (dc) and alternating (ac)
magnetic fields.
The Hall voltage is also a function of the angle at which the flux
lines pass through the material. The greatest Hall voltage occurs
when the flux lines pass perpendicularly through the material.
Otherwise the output is related to the cosine of the difference
between 90° and the actual angle.
1-3

INTRODUCTION
The sensitive area of the Hall generator is generally defined as
the largest circular area within the actual slice of the material.
This active area can range in size from 0.2 mm (0.008”) to 19
mm (0.75”) in diameter. Often the Hall generator assembly is too
fragile to use by itself so it is often mounted in a protective tube
and terminated with a flexible cable and a connector. This
assembly, known as a Hall probe, is generally provided in two
configurations:
Figure 1-3
Hall Probe Configurations
In “transverse” probes the Hall generator is mounted in a thin, flat
stem whereas in “axial” probes the Hall generator is mounted in a
cylindrical stem. The axis of sensitivity is the primary difference,
as shown by “B” in Figure 1-3. Generally transverse probes are
used to make measurements between two magnetic poles such
as those in audio speakers, electric motors and imaging
machines. Axial probes are often used to measure the magnetic
field along the axis of a coil, solenoid or traveling wave tube.
Either probe can be used where there are few physical space
limitations, such as in geomagnetic or electromagnetic
interference surveys.
1-4

INTRODUCTION
Handle the Hall probe with care. Do not bend the stem or
apply pressure to the probe tip as damage may result. Use
the protective cover when the probe is not in use.
PRODUCT DESCRIPTION
The MODEL 5080 GAUSS / TESLAMETER is a portable
instrument that utilizes a Hall probe to measure magnetic flux
density in terms of gauss, tesla or ampere-meter. The
measurement range is from 0.01 mT (0.1 G or 0.01 kAm) to
2.999T (29.99 kG or 2387 kAm). The instrument is capable of
measuring static (dc) magnetic fields and alternating (ac) fields.
The MODEL 5080 consists of a palm-sized meter and various
detachable Hall probes. The meter operates on standard 9 volt
alkaline batteries or can be operated with an external ac-to-dc
power supply. A retractable bail allows the meter to stand upright
on a flat surface. A notch in the bail allows the meter to be wall
mounted when bench space is at a premium. The large display is
visible at considerable distances. The instrument is easily
configured using a single rotary selector and two pushbuttons.
Three measurement ranges can be selected or the meter can
automatically select the best range based on the present flux
density being measured. A “zero” function allows the user to
remove undesirable readings from nearby magnetic fields
(including earth’s) or false readings caused by initial electrical
offsets in the probe and meter. Included is a “zero flux chamber”
which allows the probe to be shielded from external magnetic
fields during this operation. Another feature called “relative
mode” allows large flux readings to be suppressed so that small
variations within the larger field can be observed directly. Both
the “zero” and “relative” adjustments can be made manually or
automatically.
1-5

INTRODUCTION
Other features include three “hold” modes, allowing either the
arithmetic maximum, minimum or true peak values to be held
indefinitely until reset by the user. An analog signal is available
from a standard BNC connector that is representative of the
magnetic flux density signal and is calibrated to ±3 volts full scale
in dc mode or 3 Vrms in ac mode. This output can be connected
to a voltmeter, oscilloscope, recorder or external analog-to-digital
converter.
The meter can be fully configured and flux density readings
acquired from a remote computer or PLC using the RS-232
communications port. This is a standard 9-pin “D” connector
commonly used in personal computers. The commands follow
widely accepted protocols established by the IEEE-488.2 and
SCPI-1991 standards.
The meter, probes and accessories are protected when not in
use by a sturdy carrying case.
APPLICATIONS
• Sorting or performing incoming inspection on permanent
magnets, particularly multi-pole magnets.
• Testing audio speaker magnet assemblies, electric motor
armatures and stators, transformer lamination stacks,
cut toroidal cores, coils and solenoids.
• Determining the location of stray fields around medical
diagnostic equipment.
• Determining sources of electromagnetic interference.
• Locating flaws in welded joints.
• Inspection of ferrous materials.
• 3-dimensional field mapping.
• Inspection of magnetic recording heads.
1-6

Section 2
Specifications
INSTRUMENT
RANGE RESOLUTION
GAUSS TESLA Am GAUSS TESLA Am
300 G 30 mT 23 kAm
3 kG 300 mT 238 kAm
30 kG 3 T 2388 kAm
ACCURACY (reading on display and from RS-232 port,
including probe)
dc mode: ±1 % of reading, ±3 counts
ac mode:
20 - 10,000 Hz: ±2.5 % of reading, ±5 counts
10,000 - 20,000 Hz: ±5 % of reading, ±5 counts
ACCURACY (analog output, including probe)
dc mode: ±1 % of reading, ±5 mV.
ac mode, low range:
20 - 2000 Hz: ±3 % of reading, ±5 mV
7,000 Hz: - 3 dB (typical)
ac mode, mid and high range:
20 - 3500 Hz: ±3 % of reading, ±5 mV
13,000 Hz: - 3 dB (typical)
WARMUP TIME TO RATED
ACCURACY: 15 minutes
0.1 G
1 G
10 G
0.01 mT
0.1 mT
1 mT
0.01 kAm
0.1 kAm
1 kAm
2-1

SPECIFICATIONS
MIN / MAX HOLD ACQUISITION TIME:
dc mode: 180 ms typical
ac mode: 300 ms typical
PEAK HOLD ACQUISITION TIME:
dc mode: 1 ms typical
ac mode: 1 ms typical
ANALOG OUTPUT SCALING:
dc mode: ±3 Vdc
ac mode: 3 Vrms
ANALOG OUTPUT NOISE: 4 mV rms typical
ANALOG OUTPUT LOAD: 10 kohm min., 100 pF max.
ACCURACY CHANGE WITH
TEMPERATURE
(not including probe): ±0.02 % / ºC typical
BATTERY TYPE: 9 Vdc alkaline (NEDA 1640A)
BATTERY LIFE: 8 hours typical (two batteries,
analog output and RS-232 port
not used)
AUXILIARY POWER: 9 Vdc, 300 mA,
AUXILIARY POWER CONNECTOR: Standard 2.5 mm I.D. / 5.5 mm
O.D. connector. Center post is
positive (+) polarity.
ANALOG OUTPUT CONNECTOR: BNC
OPERATING TEMPERATURE: 0 to +50ºC (+32 to +122ºF)
STORAGE TEMPERATURE: -25 to +70ºC (-13 to +158ºF)
2-2

SPECIFICATIONS
METER DIMENSIONS:
Length: 13.2 cm (5.2 in)
Width: 13.5 cm (5.3 in)
Height: 3.8 cm (1.5 in)
WEIGHT:
Meter w/batteries: 400 g (14 oz.)
Shipping: 1.59 kg (3 lb., 8 oz.)
REGULATORY INFORMATION:
Compliance was demonstrated to the following specifications as
listed in the official Journal of the European Communities:
EN 50082-1:1992 Generic Immunity
IEC 801-2:1991 Electrostatic Discharge
Second Edition Immunity
IEC 1000-4-2:1995
ENV 50140:1993 Radiated Electromagnetic
IEC 1000-4-3:1995 Field Immunity
EN 50081-1:1992 Generic Emissions
EN 55011:1991 Radiated and Conducted
Emissions
2-3

SPECIFICATIONS
COMMUNICATIONS PORT:
Format: RS-232C
Lines supported: Transmit, receive, common.
Connector type: 9-pin “D” female
Cable length: 3 m (9.8 ft.) maximum
Receive input resistance: 3 kohm minimum
Receive voltage limit: ±30 V maximum
Transmit output voltage: ±5 V min, ±8 V typical
Baud rate: 2400
Stop bits: 1
Character length: 8
Parity: None
Standards supported: IEEE-1987.2, SCPI-1991
EMC APPLICATION NOTE
Use only high quality, double shielded cables for RS-232
connection. Keep the length of the cables less than
3 meters (9.8 ft.). Long cables (>3m) with insufficient EMI
shielding can cause excessive emissions or may be
susceptible to external interference.
2-4
SPECIFICATIONS
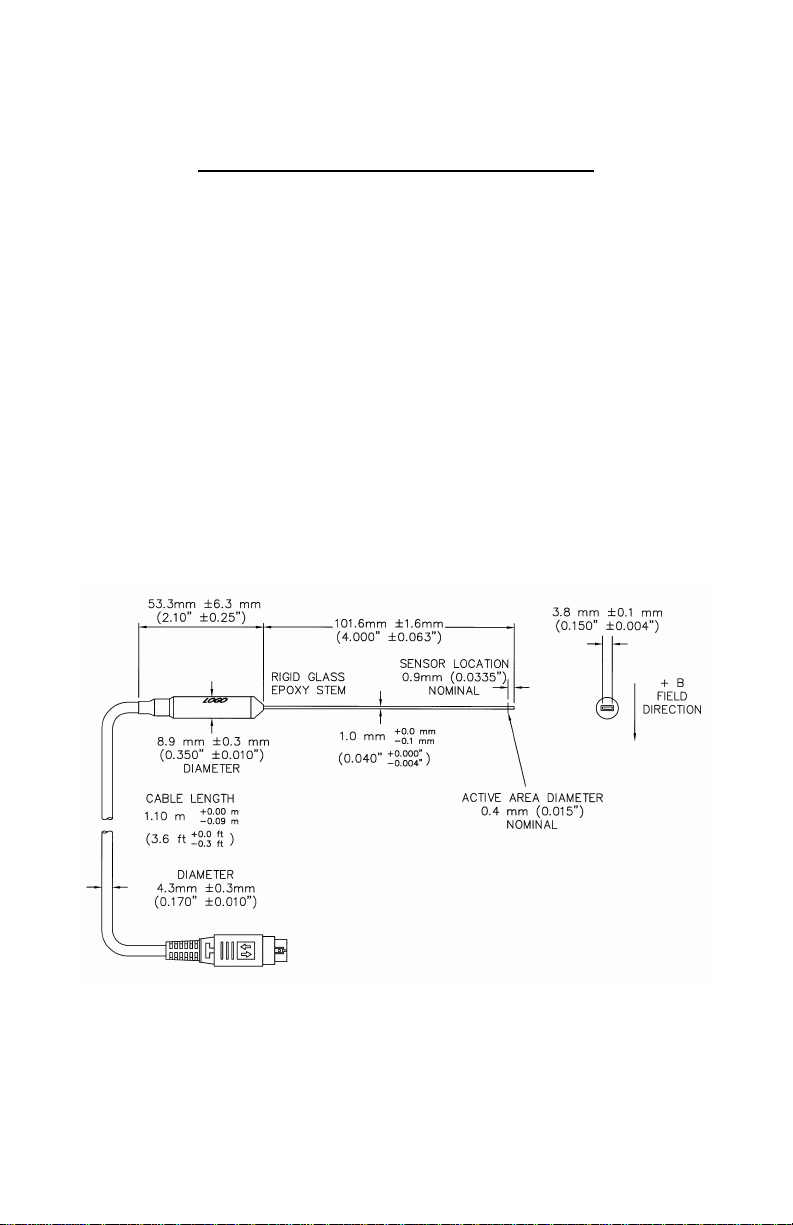
STANDARD TRANSVERSE PROBE
MODEL NUMBER: STD58-0404
FLUX DENSITY RANGE: 0 to ±3 T (0 to ±30 kG)
FREQUENCY BANDWIDTH: 0 - 20 kHz
OFFSET CHANGE WITH
TEMPERATURE: ±30 µT (300 mG) / ºC typical
ACCURACY CHANGE WITH
TEMPERATURE: - 0.05% / ºC typical
OPERATING TEMPERATURE RANGE: 0 to +75ºC (+32 to +167ºF)
STORAGE TEMPERATURE RANGE: -25 to +75ºC (-13 to +167ºF)
2-5
Figure 2-1
Standard Transverse Probe
SPECIFICATIONS
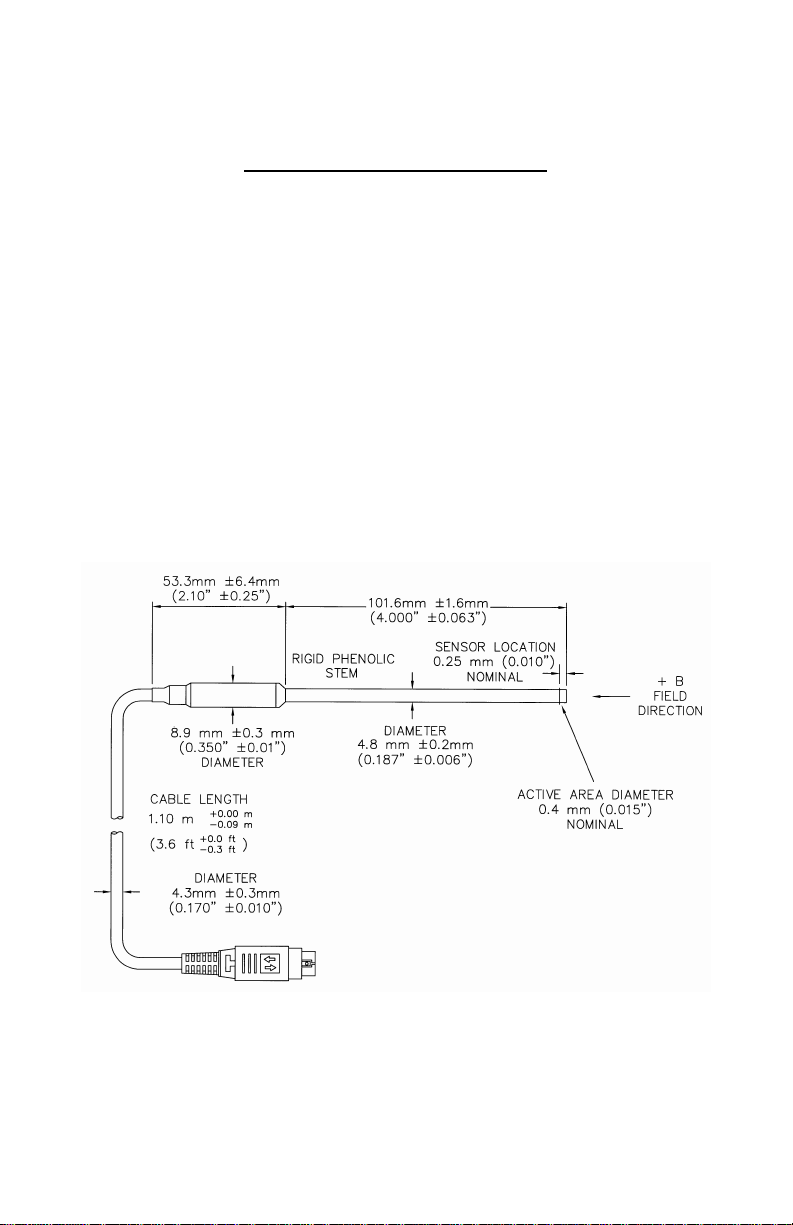
STANDARD AXIAL PROBE
MODEL NUMBER: SAD58-1904
FLUX DENSITY RANGE: 0 to ±3 T (0 to ±30 kG)
FREQUENCY BANDWIDTH: 0 - 20 kHz
OFFSET CHANGE WITH
TEMPERATURE: ±30 µT (300 mG) / ºC typical
ACCURACY CHANGE WITH
TEMPERATURE: - 0.05% / ºC typical
OPERATING TEMPERATURE RANGE: 0 to +75ºC (+32 to +167ºF)
STORAGE TEMPERATURE RANGE: -25 to +75ºC (-13 to +167ºF)
Figure 2-2
Standard Axial Probe
2-6
SPECIFICATIONS
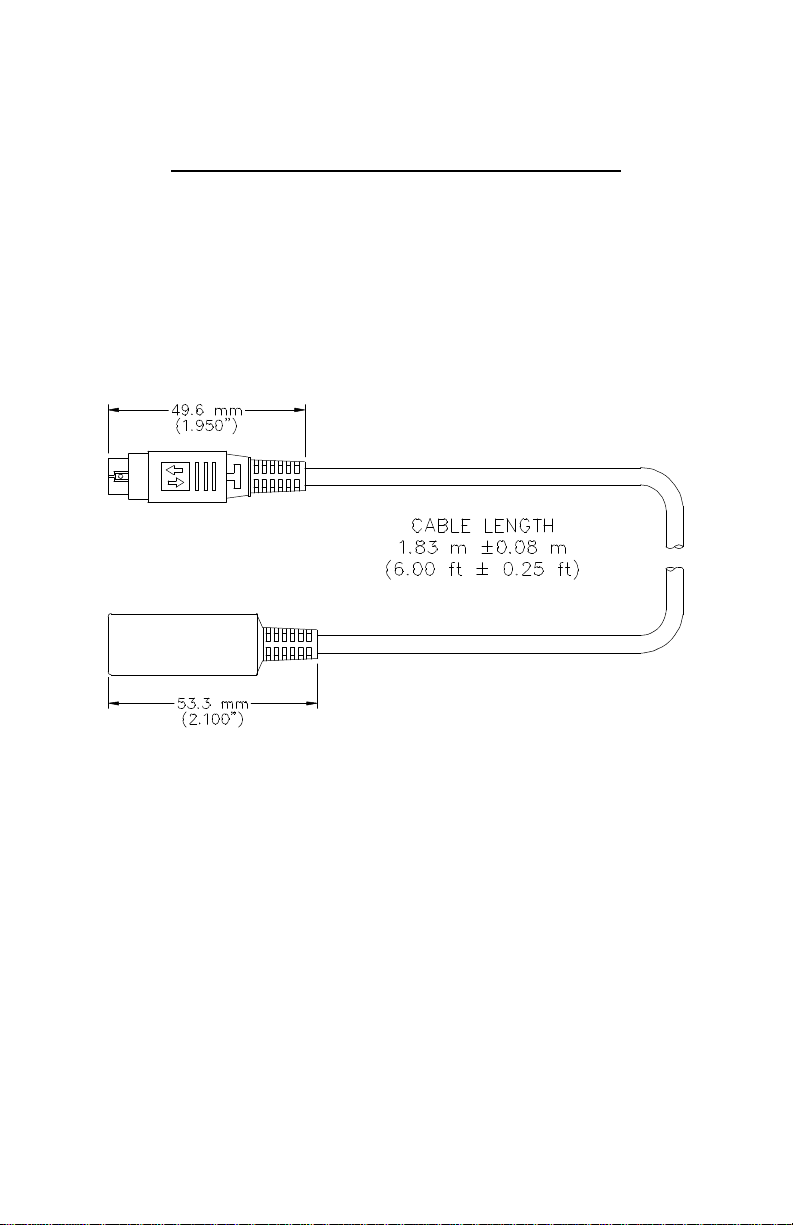
OPTIONAL PROBE EXTENSION CABLE
MODEL NUMBER: X5000-0006
OPERATING TEMPERATURE RANGE: 0 to +75ºC (+32 to +167ºF)
STORAGE TEMPERATURE RANGE: -25 to +75ºC (-13 to +167ºF)
Figure 2-3
Optional Probe Extension Cable
2-7
SPECIFICATIONS
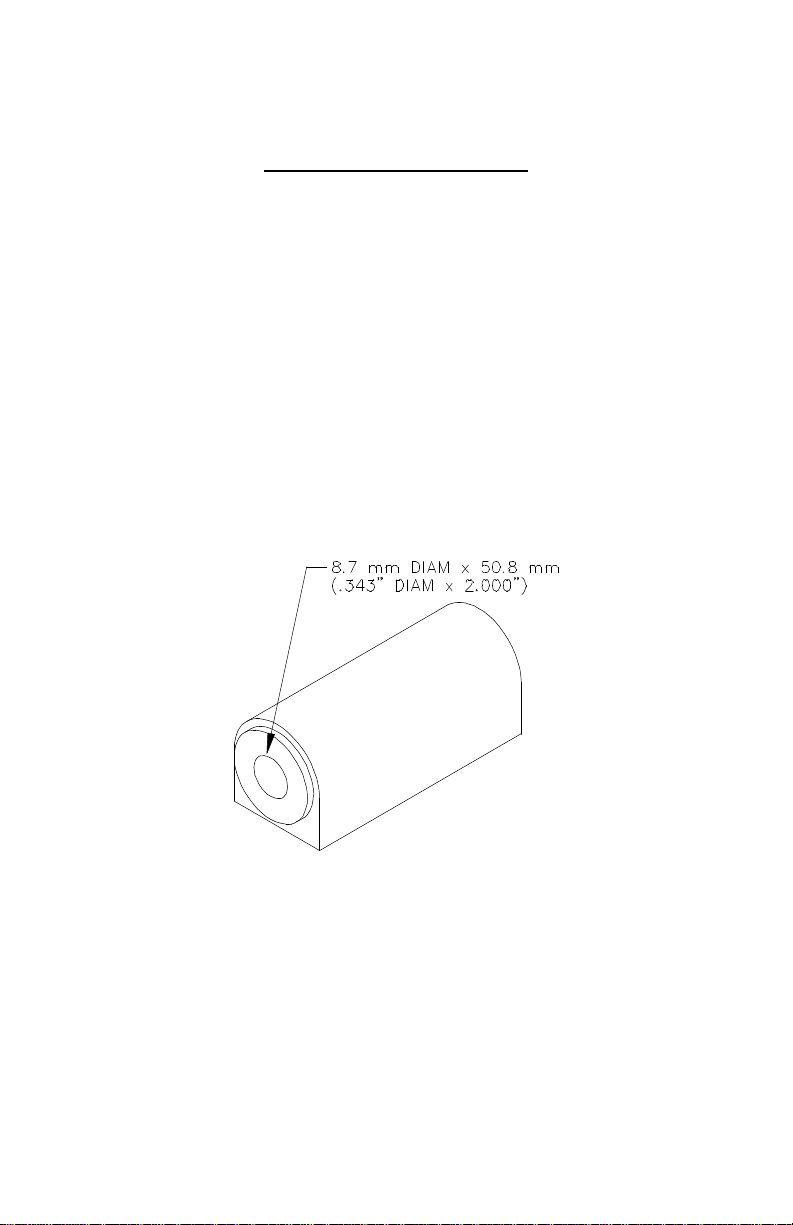
ZERO FLUX CHAMBER
MODEL NUMBER: YA-111
CAVITY DIMENSIONS:
Length: 50.8 mm (2”)
Diameter: 8.7 mm (0.343”)
ATTENUATION: 80 dB to 30 mT (300 G)
PURPOSE: To shield the probe from
external magnetic fields during
the ZERO or RELATIVE
operations.
Figure 2-4
Zero Flux Chamber
2-8
Section 3
Operating Instructions
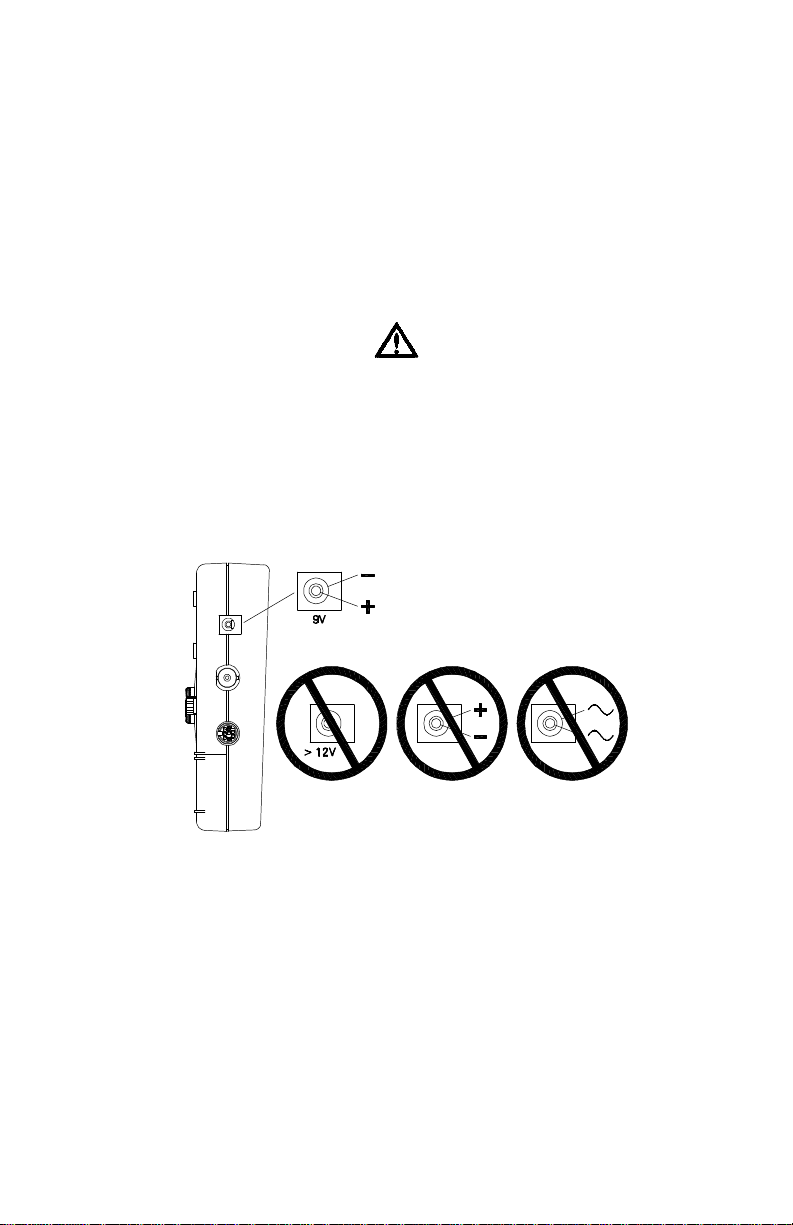
OPERATOR SAFETY
Do not connect the auxiliary power connector to an ac power
source. Do not exceed 15 Vdc regulated or 9 Vdc
unregulated . Do not reverse polarity. Use only a regulated
ac-to-dc power supply certified for country of use.
Figure 3-1
Auxiliary Power Connector Warnings
3-1
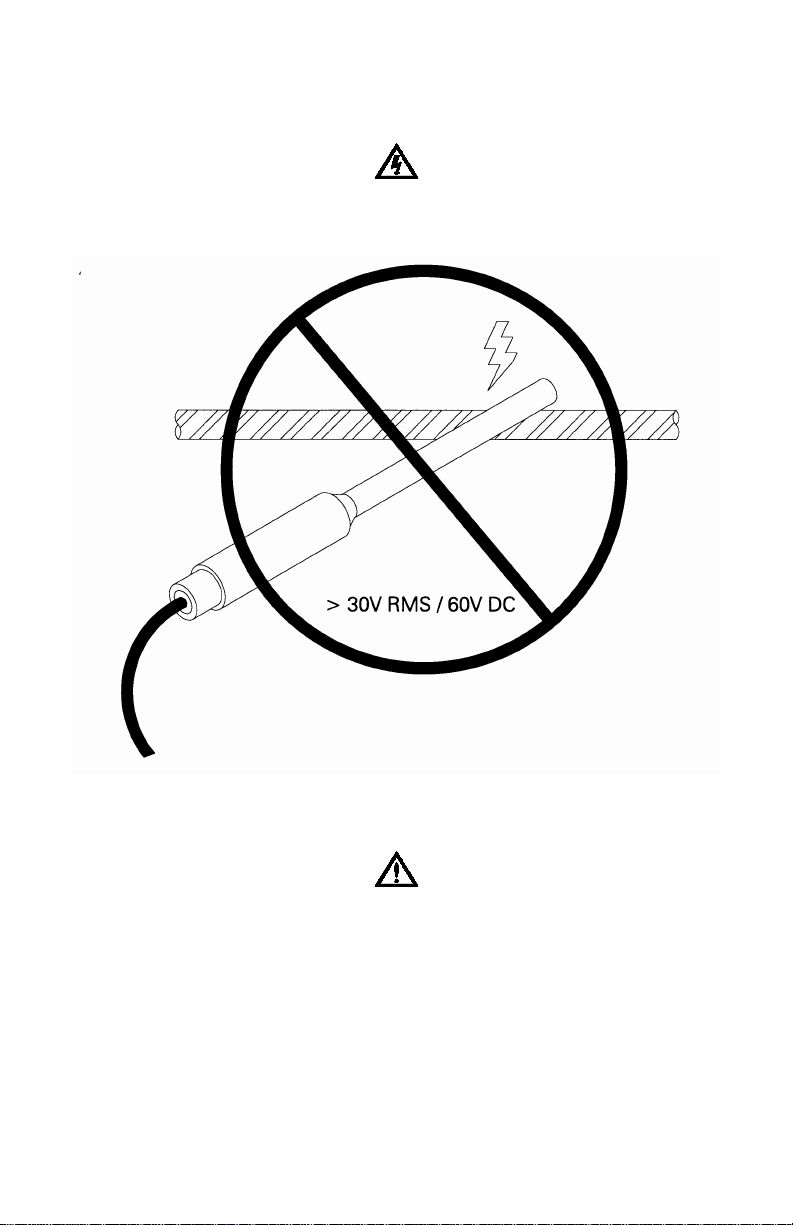
OPERATING INSTRUCTIONS
Do not allow the probe to come in contact with any voltage
source greater than 30 Vrms or 60 Vdc.
Figure 3-2
Probe Electrical Warning
Batteries contain ferrous materials that are attracted to
magnetic fields. Be careful when operating the instrument
near large magnetic fields, as it may move without warning.
Extension cables are available to increase the probe cable
length, so that the instrument can remain in a safe position
with respect to the field being measured with the probe.
3-2
OPERATING INSTRUCTIONS
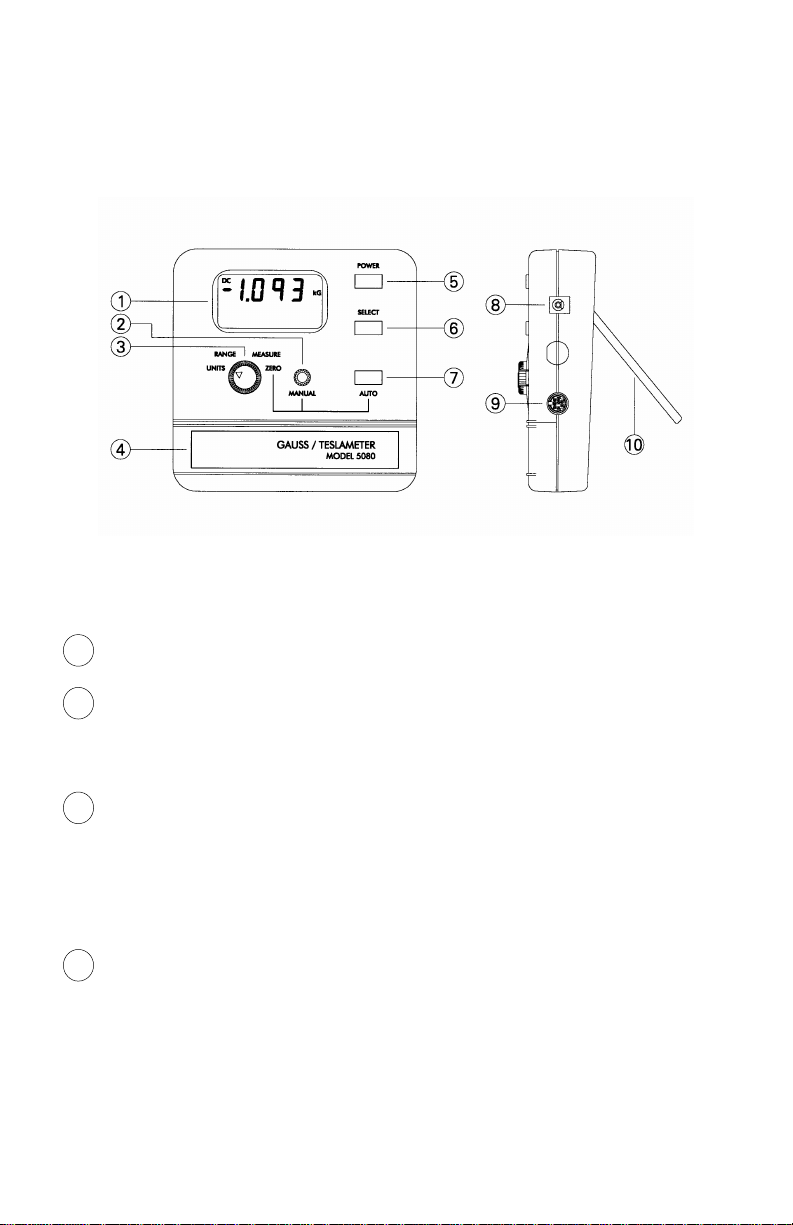
OPERATING FEATURES
Figure 3-3
Operating Features
1 Display. Liquid crystal display (LCD).
2 Manual ZERO / RELATIVE Control. In the ZERO and
RELATIVE modes of operation the user can manually
adjust the zero or relative point using this control.
3 Function Selector. This control allows the operator to
change the meter’s range, units of measure, ac or dc
measurement, hold modes and operation of the analog
output. It also engages the ZERO, RELATIVE and
MEASURE modes of operation.
4 RS-232 Port. Shielded 9-pin “D” connector supporting
RS-232-C serial communications.
3-3
OPERATING INSTRUCTIONS
5 Battery Compartment Cover. This cover slides open to
allow one or two 9 volt batteries to be installed.
6 Power Switch. Push-on / push-off type switch to apply
power to the meter.
7 SELECT Switch. Momentary pushbutton used in
conjunction with the Function Selector 3 to configure
the meter’s range, units of measure, ac or dc
measurement, hold modes and operation of the analog
output.
8 AUTO/HOLD RESET Switch. Momentary pushbutton
used to reset the held reading when one of the HOLD
modes is being used, or to start an automatic ZERO or
RELATIVE operation when in the ZERO or RELATIVE
modes.
9 Auxiliary Power Connector. This is an industry standard
2.5 mm I.D. / 5.5 mm O.D. dc power connector. The
meter will accept a regulated dc voltage in the range of 6 15 Vdc at 300 mA minimum current or unregulated 9 Vdc.
The center pin is positive (+). The internal batteries are
disconnected when using this connector.
Do not connect the auxiliary power connector to an ac power
source. Do not exceed 15 Vdc regulated or 9 Vdc
unregulated. Do not reverse polarity. Use only a regulated
ac-to-dc power supply certified for country of use.
3-4
OPERATING INSTRUCTIONS
10 Analog Output Connector. A voltage signal
representative of the magnetic flux density being
measured is available at this BNC connector. Calibration
is set to ±3.0 V full scale dc or 3.0 Vrms ac, depending
upon the mode of operation . Minimum load is 10 kohm.
The analog output will be active when the ANALOG
ON/OFF function has been turned ON using the Function
Selector 3 .
11 Probe Connector. The Hall probe or probe extension
cable plugs into this connector and locks in place. To
disconnect, pull on the body of the plug, not the cable !
12 Meter Stand. Retractable stand that allows the meter to
stand upright when placed on a flat surface. A notch in
the stand allows the meter to be mounted to a vertical
surface.
3-5
OPERATING INSTRUCTIONS
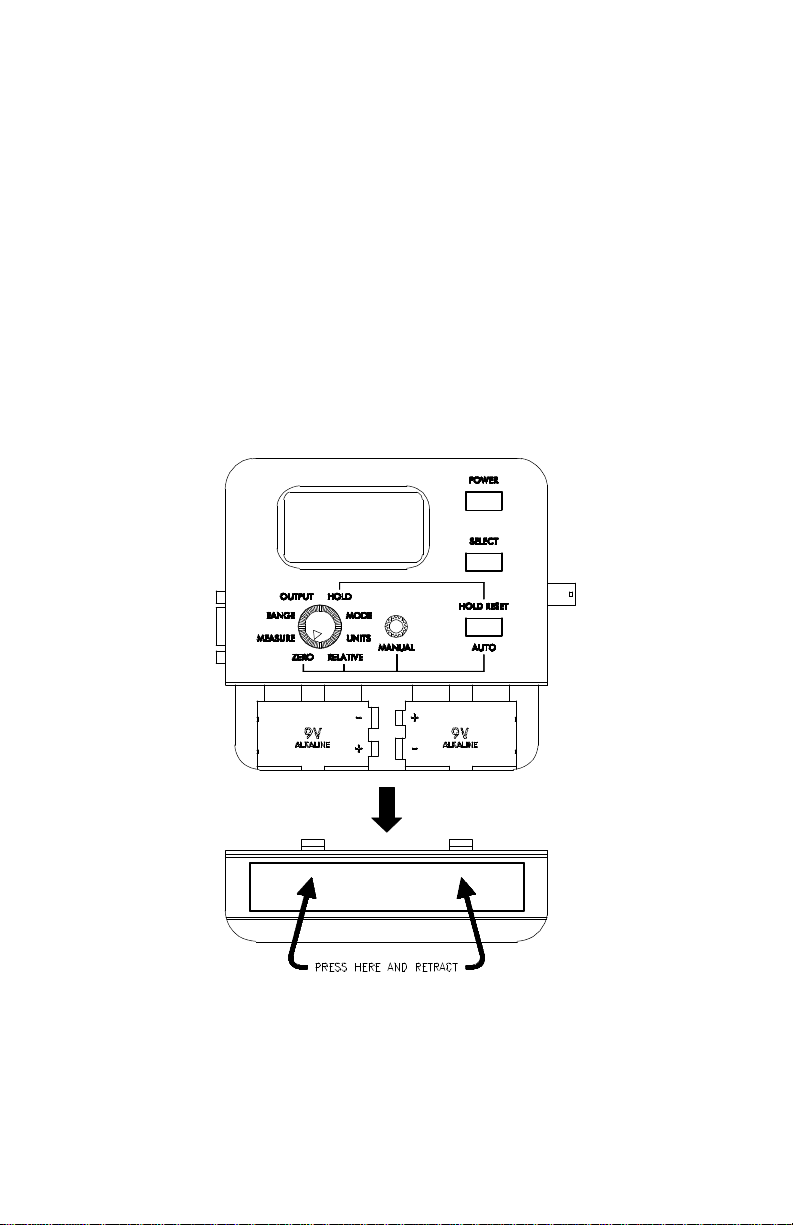
INSTRUMENT PREPARATION
1) With the power switch turned off (POWER pushbutton in the
full up position) apply pressure to the battery compartment cover
at the two points shown in Figure 3-4. Slide the cover open and
remove.
2) Install one or two 9 volt alkaline batteries (two batteries will
provide longer operating life). The battery compartment is
designed so that the battery polarity cannot be reversed.
Reinstall the battery compartment cover.
Figure 3-4
Battery Installation
3-6
OPERATING INSTRUCTIONS
3) If using an ac-to-dc power supply review Figure 3-1 for safety
notes and the SPECIFICATIONS section for voltage and current
ratings. When using a power supply the batteries are
automatically disconnected.
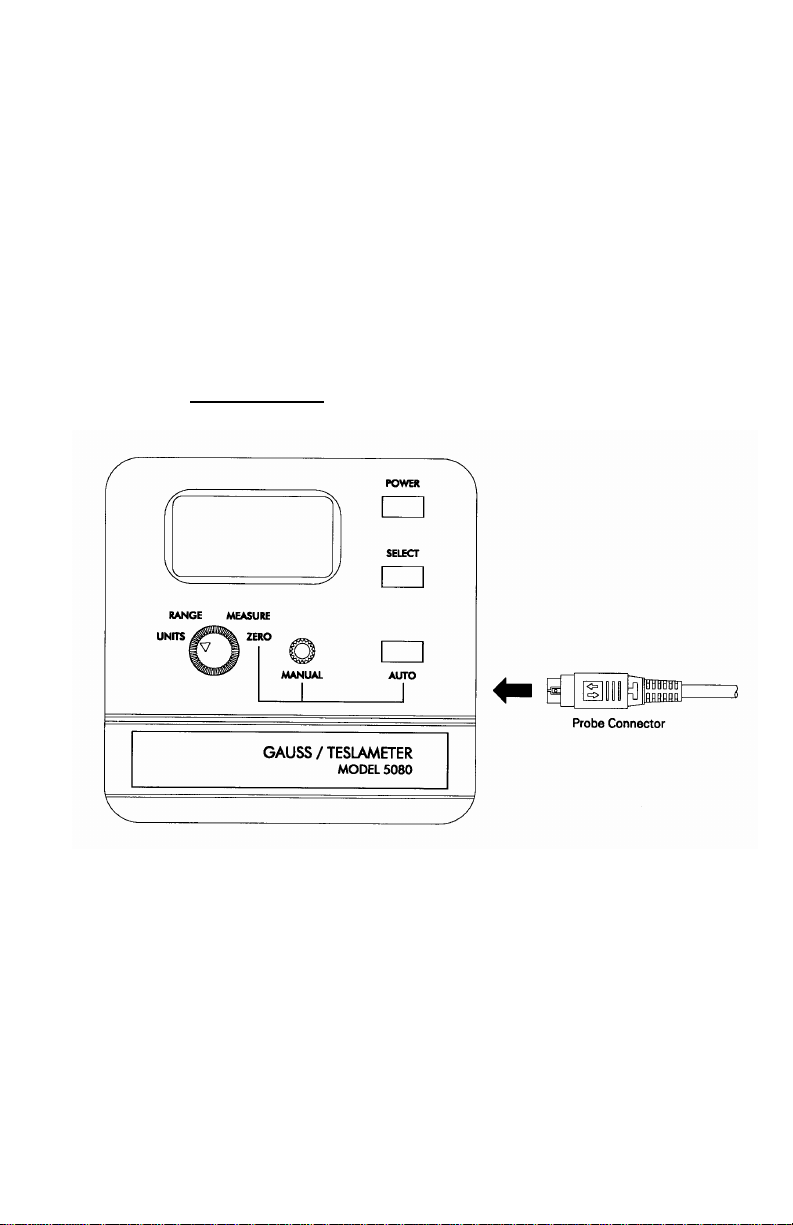
4) Install the probe or probe extension cable by matching the key
way in the connector to that in the mating socket in the meter.
The connector will lock in place. To disconnect, pull on the body
of the plug, not the cable!
Figure 3-5
Probe Connection
3-7
OPERATING INSTRUCTIONS
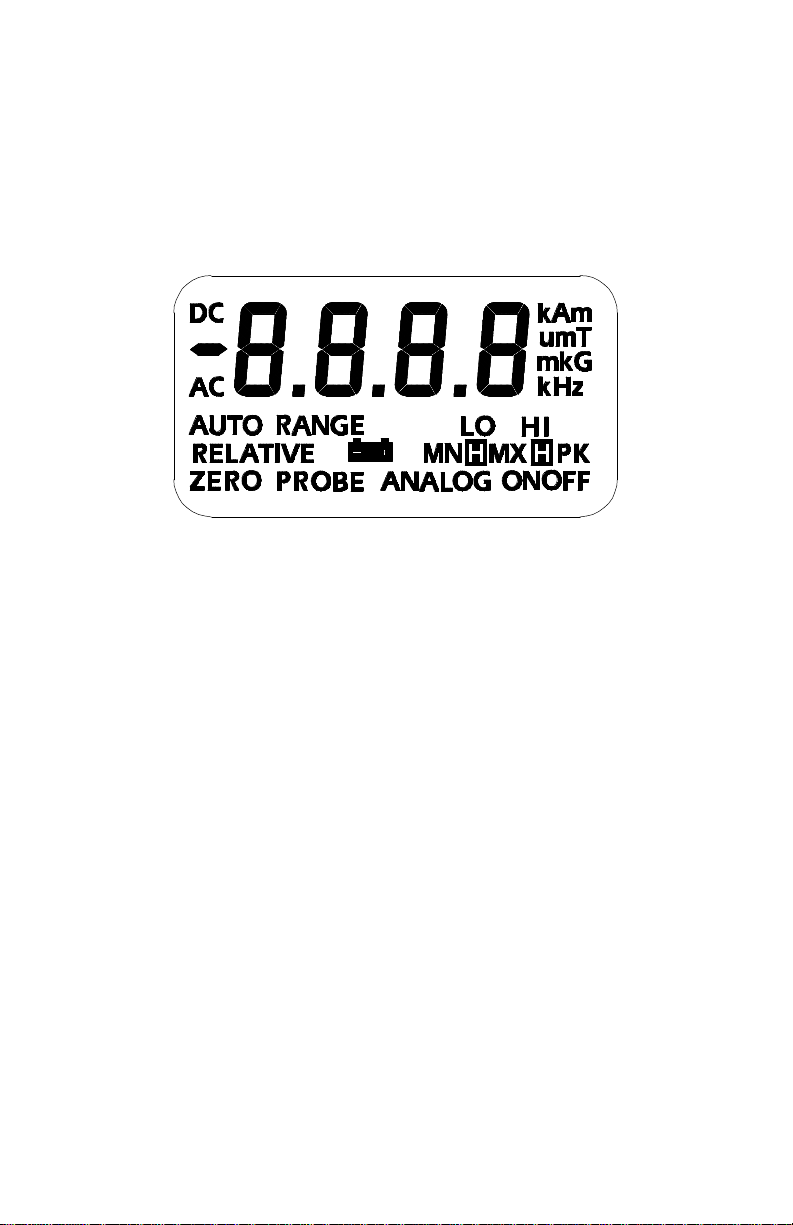
POWER-UP
Depress the POWER switch. There will be a momentary audible
beep and all display segments will appear on the display.
Figure 3-6
Power-Up Display
The instrument will conduct a self test before measurements
begin. If a problem is detected the phrase “Err” will appear on the
display followed by a 3-digit code. The circuitry that failed will be
retested and the error code will appear after each failure. This
process will continue indefinitely or until the circuitry passes the
test. A condition in which a circuit fails and then passes should
not be ignored because it indicates an intermittent problem that
should be corrected.
If the self test is successful the meter will perform a self
calibration. During this phase the meter will display the software
revision number, such as “r 1.0”. Calibration will halt if there is no
Hall probe connected. Until the probe is connected the phrase
“Err” will appear accompanied by a flashing “PROBE” annunciator
as shown in Figure 3-7.
3-8
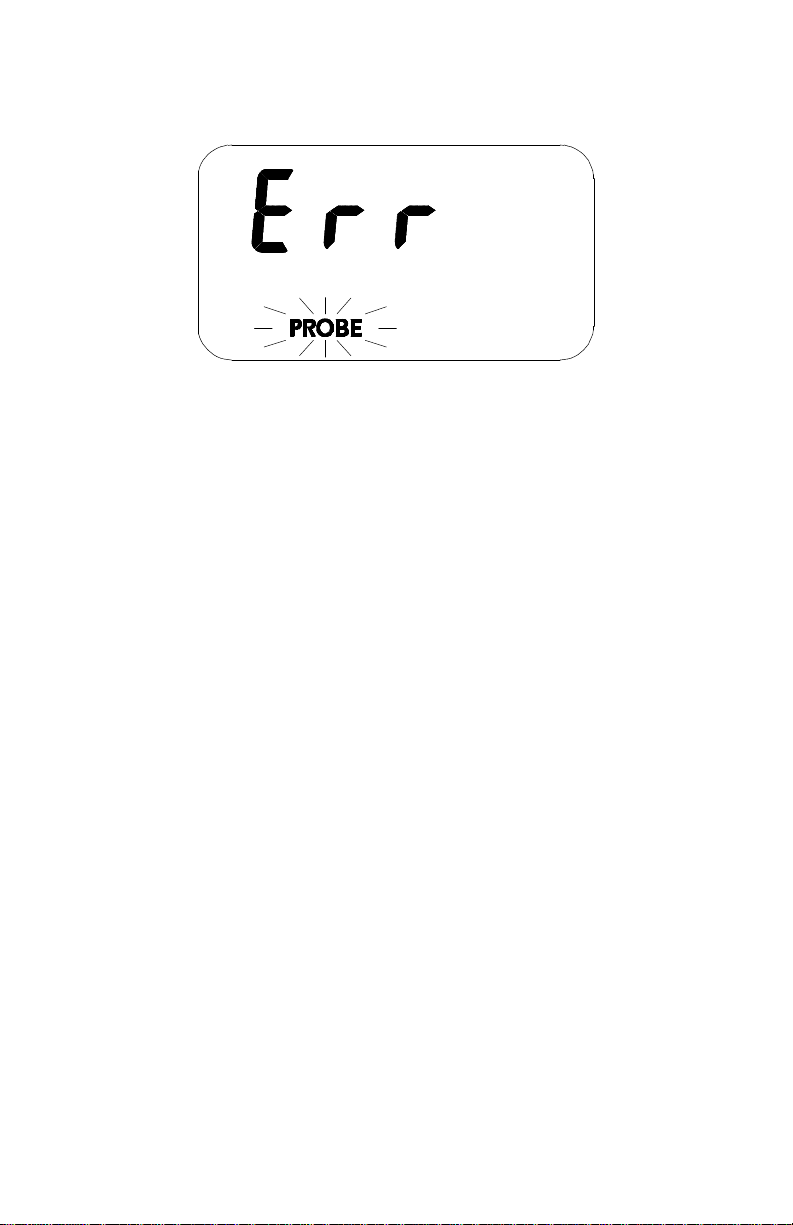
OPERATING INSTRUCTIONS
Figure 3-7
Missing Probe Indication
After power-up the position of the FUNCTION selector switch will
determine what happens next. For instance if the selector is in
the RANGE position the meter will wait for the user to change the
present range. If in the MEASURE position flux density
measurements will begin.
Allow adequate time for the meter and probe to reach a stable
temperature. See the SPECIFICATIONS section for specific
information.
POWER-UP SETTINGS
The meter permanently saves certain aspects of the instrument’s
setup and restores them the next time the meter is turned on.
The conditions that are saved are:
RANGE setting (including AUTO range)
MODE (ac or dc)
UNITS of measure (gauss, tesla or ampere-meter)
HOLD mode (min, max or peak)
3-9
OPERATING INSTRUCTIONS
Other aspects are not saved and default to these conditions:
RELATIVE mode (turned OFF)
RELATIVE value (set to 0)
ZERO mode (inactive)
OUTPUT function (turned OFF and output set to 0 Vdc)
NOTE: The present setup of the instrument is saved only when
the FUNCTION selector is returned to the MEASURE position.
For example assume the meter is in the MEASURE mode on the
30 mT range. The FUNCTION selector is now turned to the
RANGE position and the 300 mT range is selected. The meter is
turned off and on again. The meter will be restored to the 30 mT
range because the FUNCTION selector was never returned to the
MEASURE mode prior to turning it off.
LOW BATTERY CONDITION
The meter is designed to use one or two standard 9V alkaline
batteries (two batteries will provide longer operating life). When
the battery voltage becomes too low the battery symbol on the
display will flash, as shown in Figure 3-8. Replace the batteries
or use an external ac-to-dc power supply.
Instrument specifications are not guaranteed when a low
battery condition exists !
3-10

OPERATING INSTRUCTIONS
Figure 3-8
Low Battery Indication
OVERRANGE CONDITION
If the magnitude of the magnetic flux density exceeds the limit of
the selected range the meter will display a flashing value of
“2999” (gauss or tesla mode) or “2387” (ampere-meter mode).
The next highest range should be selected. If already on the
highest range then the flux density is too great to be measured
with this instrument.
Figure 3-9
Overrange Indication
3-11

OPERATING INSTRUCTIONS
AC OR DC MEASUREMENT SELECTION
The meter is capable of measuring either static (dc) or alternating
(ac) magnetic fields. To choose the desired mode rotate the
function selector to the MODE setting, then press the SELECT
pushbutton to select AC or DC on the display.
The dc and ac modes is discussed in more detail later in this
section.
This setting is saved and will be restored the next time the meter
is turned on.
Figure 3-10
MODE (AC-DC) Function
3-12

OPERATING INSTRUCTIONS
UNITS OF MEASUREMENT SELECTION
The meter is capable of providing flux density measurements in
terms of gauss (G), tesla (T) or ampere-meters (Am). To choose
the desired units, rotate the function selector to the UNITS
position. Press the SELECT pushbutton to select G, T or Am on
the display.
This setting is saved and will be restored the next time the meter
is turned on.
Figure 3-11
UNITS Function
3-13

OPERATING INSTRUCTIONS
RANGE SELECTION
The meter is capable of providing flux density measurements on
one of three fixed ranges, or it can be programmed to
automatically select the best range for the present flux density.
The available ranges are listed in the SPECIFICATIONS section
of this manual. The ranges advance in decade steps. The
lowest range offers the best resolution while the highest range
allows higher flux levels to be measured.
In the AUTO range mode the range is advanced if the reading
reaches the full scale of the present range. This is 2999 if in the
gauss or tesla mode (such as 299.9 G or 299.9 mT), or 2387 if in
the ampere-meter mode (such as 23.87 kAm). The range is
lowered if the present reading falls below 10% of full scale for the
present range. The speed at which the readings are updated
decreases slightly when AUTO ranging is used.
NOTE: The AUTO range selection will be canceled if the
RELATIVE mode is turned on.
To choose the desired range rotate the function selector to the
RANGE position. The “RANGE” legend will flash. Press the
SELECT pushbutton to select the desired range or AUTO
RANGE on the display.
This setting is saved and will be restored the next time the meter
is turned on.
3-14

OPERATING INSTRUCTIONS
Figure 3-12
RANGE Function
3-15

OPERATING INSTRUCTIONS
HOLD MODE SELECTION
In some applications it may be desirable to hold a reading that is
either greater than or less than all previous readings, or which
has the greatest peak value whether positive or negative.
The MAX HOLD function holds the reading that is arithmetically
greater than all previous readings. For instance a reading of
+125.0 is greater than +99.0 or -150.0.
The MIN HOLD function holds the reading that is arithmetically
less than all previous readings. For instance a reading of -125.0
is less than -99.0 or +150.0.
The PEAK HOLD function captures and holds the peak value of
the flux density waveform within the response time capabilities of
the meter. See the SPECIFICATIONS section of this manual for
more information. The peak can be either positive or negative,
whichever has the greatest magnitude. For instance a peak
value of -100.0 is greater than a peak value of +90.0.
To choose the desired hold mode rotate the function selector to
the HOLD position. Press the SELECT pushbutton to select the
desired mode on the display. MAX HOLD is indicated by “MX”.
MIN HOLD is indicated by “MN”. PEAK HOLD is indicated by
“PK”. The “OFF” legend will appear when all HOLD modes are
turned off.
This setting is saved and will be restored the next time the meter
is turned on.
3-16

OPERATING INSTRUCTIONS
Figure 3-13
HOLD Function
MIN / MAX HOLD USAGE
See the SPECIFICATIONS section for response time information.
The MAX HOLD function holds the reading that is arithmetically
greater than all previous readings. The MIN HOLD function holds
the reading that is arithmetically less than all previous readings.
These modes are useful in determining the maximum or minimum
value of magnetic events that occur over a period of time.
The MIN or MAX HOLD operation begins when the function
selector is returned to the MEASURE position. If the reading
exceeds the range limit the meter will hold a flashing value of
3-17

OPERATING INSTRUCTIONS
“2999” (gauss or tesla mode), “2387” (ampere-meter mode) or
the maximum value allowed in the RELATIVE mode.
The held value can be reset by pressing the HOLD RESET
pushbutton. The next value displayed after a reset will be the
present value of flux density. For instance if the held reading is
200.0 G and the present flux density is -100.0 G, the meter will
display -100.0 G after the reset.
If the analog output is being used the output signal will continue
to represent the real time flux density as seen by the probe. It is
not affected by the HOLD function.
PEAK HOLD USAGE
See the SPECIFICATIONS section for response time and
accuracy information.
In the PEAK HOLD mode the input signal is sampled many times
each second. Each sample is compared to all previous samples
and that which has the greatest amplitude (regardless of polarity)
is held on the display. This mode can be used to capture the
peak value of a fast, one-time magnetic event such as a
magnetizing pulse.
The PEAK HOLD operation begins when the function selector is
returned to the MEASURE position. If the reading exceeds the
range limit the meter will hold a flashing value of “2999” (gauss or
tesla mode), “2387” (ampere-meter mode) or the maximum value
allowed in the RELATIVE mode. The held value can be reset by
pressing the HOLD RESET pushbutton.
These are the differences between the PEAK HOLD mode and
the MIN / MAX HOLD modes:
3-18

OPERATING INSTRUCTIONS
- The PEAK HOLD mode considers only the magnitude of
the reading and not the polarity.
- The response time of the PEAK HOLD mode is much
faster but final accuracy is less.
If the analog output is being used the output signal will continue
to represent the real time flux density as seen by the probe. It is
not affected by the HOLD function.
3-19

OPERATING INSTRUCTIONS
ZERO FUNCTION
“Zeroing” the probe and meter is one of the most important steps
to obtaining accurate dc flux density measurements. The ideal
Hall generator produces zero output in the absence of a magnetic
field, but actual devices are subject to variations in materials,
construction and temperature. Therefore most Hall generators
produce some output even in a zero field. This will be interpreted
by the meter as a flux density signal.
Also, the circuits within the meter can produce a signal even
when there is no signal present at the input. This will be
interpreted as a flux density signal. Lastly magnetic sources
close to the actual field being measured, such as those from
electric motors, permanent magnets and the earth (roughly 0.5
gauss or 50 µT), can induce errors in the final reading.
It is vital to remove these sources of error prior to making actual
measurements. The process of “zeroing” removes all of these
errors in one operation. The meter cancels the combined dc
error signal by introducing another signal of equal magnitude with
opposite polarity. After zeroing the only dc signal that remains is
that produced by the probe when exposed to magnetic flux.
NOTE: Zeroing the meter and probe affects only the static (dc)
component of the flux density signal.
NOTE: The process of zeroing also affects the analog signal.
There may be situations when the user prefers to shield the
probe from all external magnetic fields prior to zeroing. Provided
with the meter is a ZERO FLUX CHAMBER which is capable of
shielding against fields as high as 30 mT (300 G or 23.88 kAm).
The probe is simply inserted into the chamber before the zeroing
process begins.
3-20

OPERATING INSTRUCTIONS
Handle the Hall probe with care. Do not bend the stem or
apply pressure to the probe tip as damage may result.
In other situations the user may want the probe to be exposed to
a specific magnetic field during the zeroing process so that all
future readings do not include that reading (such as the earth’s
field). This is possible with the following restrictions:
1) The external field must not exceed 30 mT (300 G or
23.88 kAm).
2) The field must be stable during the zeroing process. It should
not contain alternating (ac) components.
AUTOMATIC ZERO FUNCTION
The meter provides two methods to zero the probe. The first is
completely automatic. Prepare the probe for zeroing, then rotate
the function selector to the ZERO position. The “ZERO” legend
will flash and actual dc flux density readings will appear on the
display. The meter will select the lowest range regardless of
which range was in use prior to using the ZERO function. Recall
that the maximum flux density level that can be zeroed is 30 mT
(300 G or 23.88 kAm). If the existing field is too large consider
using the RELATIVE mode (discussed later in this section). The
meter will switch over to the dc mode of operation during zeroing.
Recall that the zeroing operation affects dc errors only. If you
wish to suppress an ac field consider using the RELATIVE mode.
3-21

OPERATING INSTRUCTIONS
Figure 3-14
Automatic ZERO Function
Press the AUTO pushbutton and the process will begin. The
“AUTO” legend will also flash. Once automatic zeroing begins it
must be allowed to complete. During this time all controls are
disabled except for the POWER switch. The process normally
takes from 5 to 15 seconds.
The meter selects the lowest range and adjusts the nulling signal
until the net result reaches zero. If the existing field is too large
or unstable the meter will sound a double beep and the phrase
“OVER” will appear momentarily on the display. At this point the
automatic process is terminated and the flashing “AUTO” legend
will disappear. The “ZERO” legend will continue to flash to
remind the user that the ZERO mode is still active.
3-22

OPERATING INSTRUCTIONS
If the nulling process is successful, the next highest range is
selected. No further electronic adjustments are made, but at this
stage a reading is acquired which will be mathematically
subtracted from all future readings on this range. This process is
then repeated for the highest range. When finished, the meter
will sound an audible beep and the flashing “AUTO” legend will
disappear. The “ZERO” legend will continue to flash to remind
the user that the ZERO mode is still active. At this point the
automatic process can be repeated or a manual adjustment can
be performed (see “Manual Zeroing”).
The final zero values will remain in effect until the meter and
probe are zeroed again, if the probe is disconnected or if the
meter is turned off and back on again.
NOTE: Zeroing the probe cancels the RELATIVE mode if it was
turned on.
MANUAL ZERO FUNCTION
The second zeroing method is a manual adjustment. This
feature also allows the user to set the “zero” point to something
other than zero, if desired. Position the probe for zeroing, then
rotate the function selector to the ZERO position. The “ZERO”
legend will flash and actual dc flux density readings will appear
on the display. The meter will select the lowest range regardless
of which range was in use prior to selecting the ZERO function.
Recall that the maximum flux density level that can be zeroed is
30 mT (300 G or 23.88 kAm). If the existing field is too large,
consider using the RELATIVE mode (discussed later in this
section). The meter will switch over to the dc mode of operation
during zeroing. Recall that the zeroing operation affects dc errors
only. If you wish to suppress an ac field consider using the
RELATIVE mode.
3-23

OPERATING INSTRUCTIONS
Figure 3-15
Manual ZERO Function
By turning the MANUAL control in either direction the reading will
be altered. Turning the control clockwise adds to the reading,
turning it counterclockwise subtracts from the reading. Turning it
slowly results in a fine adjustment, turning it quickly results in a
coarse adjustment.
NOTE: Making a manual ZERO adjustment not only affects the
lowest range but also the higher ranges, though to a lesser
extent. For example, assume an automatic ZERO has already
been performed, after which all three ranges should read zero.
Now a manual adjustment is made that causes the reading on
the lowest range to be non-zero. The reading on the other
ranges may also be non-zero depending upon the magnitude of
the change. The adjustment has 10 times less effect on the
middle range and 100 times less effect on the highest range.
3-24

OPERATING INSTRUCTIONS
NOTE: Zeroing the probe cancels the RELATIVE mode if it was
turned on.
RELATIVE MODE
The RELATIVE mode allows a specific flux density value to be
subtracted from all future readings. Thus all future readings will
be “relative” to that value. For instance if the relative value is
+100.0 gauss, and the present flux density is +112.0 gauss, the
actual displayed value will be +12.0 gauss. If the flux density
drops to +77.0 gauss, the actual displayed value will be -23.0.
Thus the RELATIVE mode allows for the direct readout of
variations around a given field, whether static (dc) or alternating
(ac).
There are two ways to generate a relative value. In the automatic
mode the meter uses the present flux density reading from the
probe as the relative value. In the manual mode, the user can
specify a value using the MANUAL control. Each mode will be
discussed in more detail.
There are three restrictions when using the RELATIVE mode:
1) The RELATIVE mode can only be used on a fixed range. If the
AUTO range feature is in use and then the RELATIVE mode is
turned on the AUTO range feature is canceled. Conversely, if the
RELATIVE mode is turned on and then the AUTO range feature
is turned on, the RELATIVE mode is canceled.
2) If the RELATIVE mode has been turned ON and the probe is
zeroed via the ZERO function, the RELATIVE mode is canceled.
3) The point at which the meter declares an OVERRANGE
condition changes when using the RELATIVE mode. Normally
3-25

OPERATING INSTRUCTIONS
an overrange occurs when the reading reaches the full scale limit
of ±2999 in the gauss or tesla mode (such as ±299.9 G, ±29.99
mT, etc.) or ±2387 if in the ampere-meter mode (such as 23.87
kAm). At that point the digits will remain at “2999” or “2387” and
will flash to indicate an overrange condition (see Figure 3.9).
In the RELATIVE mode this limit can be exceeded by about 35%
to a maximum value of ±4095 as seen by the probe.
To clarify this, suppose the meter is set to the 300 mT range and
the probe is in a +350.0 mT field. Under normal conditions this
would have resulted in an overrange condition (a flashing reading
of +299.9 mT). Now the RELATIVE mode is turned on with an
initial relative value of 0. In this mode the meter is able to
measure flux density up to ±409.5 mT. A non-flashing reading of
+350.0 mT will now appear on the display.
Now the probe is inserted into the zero flux chamber and a
relative value is set to +200.0 mT. The probe is now inserted
back into the original +350.0 mT field. The displayed value will
now be +150.0 mT (+350.0 - 200.0 = +150.0). The field then
increases to +420.0 mT. This is an overrange condition because
the limit of 409.5 mT (as seen by the probe) has been exceeded.
A flashing reading of +209.5 will appear on the display to indicate
an overrange condition (+409.5 - 200.0 = +209.5).
There may be situations when the user may prefer to shield the
probe from all external magnetic fields prior to performing a
RELATIVE operation. Provided with the meter is a ZERO FLUX
CHAMBER which is capable of shielding against fields as high as
30 mT (300 G or 23.88 kAm). The probe is simply inserted into
the chamber before the RELATIVE operation begins.
3-26

OPERATING INSTRUCTIONS
Handle the Hall probe with care. Do not bend the stem or
apply pressure to the probe tip as damage may result.
To activate or deactivate the RELATIVE mode rotate the function
selector to the RELATIVE position. The RELATIVE legend will
flash and actual flux density readings will appear on the display.
Press the SELECT pushbutton to turn the mode ON or OFF.
Then set the relative point using either the automatic or manual
mode.
NOTE: The RELATIVE mode is canceled if the probe and meter
are zeroed, if the probe is disconnected, if the meter’s range is
changed or if the meter is turned off and back on again.
NOTE: If the analog output is being used the output signal will
continue to represent the flux density as seen by the probe. It is
not affected by the RELATIVE operation.
3-27

OPERATING INSTRUCTIONS
Figure 3-16
RELATIVE Function
AUTOMATIC RELATIVE MODE
In the automatic mode, the present flux density as seen by the
probe is used as the relative value. Prepare the probe and
select an appropriate range and mode (ac or dc) as needed
(AUTO range is deactivated when RELATIVE mode is used).
3-28

OPERATING INSTRUCTIONS
Figure 3-17
Automatic RELATIVE Function
Press the AUTO pushbutton. The “AUTO” legend will flash for a
moment and a reading will be acquired. This now becomes the
new relative value. The meter will sound a single beep and the
“AUTO” legend will disappear. The reading should now be zero.
From this point the relative value will be subtracted from all future
readings. The “RELATIVE” legend will continue to flash to
remind the user that the RELATIVE mode is still active. At this
point, the automatic process can be repeated, or a manual
adjustment can be made (see “Manual Relative Mode”). When
returning to the MEASURE mode, the “RELATIVE” legend will
remain on to remind the user that the displayed value is a relative
value, not an absolute value.
3-29

OPERATING INSTRUCTIONS
MANUAL RELATIVE MODE
The second method by which to set a relative value is a manual
adjustment. In some cases the user will wish to set an absolute
relative value. To do this, insert the probe in the ZERO FLUX
CHAMBER provided with the meter.
Handle the Hall probe with care. Do not bend the stem or
apply pressure to the probe tip as damage may result.
At this point the “RELATIVE” legend will be flashing and actual
flux density readings will be displayed. By turning the MANUAL
control in either direction the reading will be altered. Turning the
control clockwise adds to the reading, turning it counterclockwise
subtracts from the reading. Turning it slowly results in a fine
adjustment. Turning it quickly results in a coarse adjustment.
Once the desired relative value has been reached, the probe can
be removed from the ZERO FLUX CHAMBER and measurements can begin. The final relative value will be subtracted from
all future readings.
In other cases, the probe may be positioned in a stable dc or ac
magnetic field that does not exceed the present range limit (see
the prior discussion on overrange conditions in the RELATIVE
mode). In most cases the reading will be adjusted to zero so that
the value of the reference is subtracted from all future readings.
3-30

OPERATING INSTRUCTIONS
Figure 3-18
Manual RELATIVE Function
ANALOG OUTPUT FUNCTION
The meter is capable of providing an analog voltage signal
proportional to the present flux density level. Calibration is set to
±3.0 V full scale dc or 3.0 Vrms ac, depending upon the mode of
operation. This signal, available at the BNC connector, can be
connected to a voltmeter, oscilloscope, recorder or external
analog-to-digital converter.
Power consumption increases when using the analog output. For
this reason the analog output is set to zero volts upon power-up
and the analog function is turned OFF. To activate or deactivate
the output, rotate the function selector to the OUTPUT position,
then press the SELECT pushbutton to select the desired setting.
3-31

OPERATING INSTRUCTIONS
There are two modes of operation that affect the upper frequency
limit of the output signal (see Figure 3-19). The LO setting has
an upper frequency limit of 1 kHz. When returning to the
MEASURE mode the user will be provided with both an analog
output signal and flux density readings on the display. The use
of the LO mode will reduce the rate at which the display is
updated with new readings.
The HI setting has an upper frequency limit of 20 kHz. When
returning to the MEASURE mode the user will be provided only
with an analog output signal. In this mode the only legends that
will appear will be “ANALOG ON” and “HI” (see Figure 3-20).
Figure 3-19
OUTPUT Function
3-32

OPERATING INSTRUCTIONS
ANALOG OUTPUT USAGE
See the SPECIFICATIONS section for frequency range and
accuracy of the analog output.
The analog output signal is calibrated to ±3 Vdc or 3 Vrms,
depending upon the selected mode. For instance on the 30 mT
range a reading of -12.3 mT relates to a output voltage of -1.23
Vdc whereas on the 3 T range a reading of -1.23 T produces the
same output. The analog output can reach a maximum output of
about ±4.25 Vdc in order to accommodate the peak value of a
3 Vrms ac signal. This means that the analog output can be
used to measure flux density levels that exceed the normal range
of the displayed readings. For instance a level of 36.5 mT on the
30 mT range would normally result in a flashing “29.99” mT
overrange condition, but the output will still be +3.65 Vdc.
There are two modes of operation that affect the upper frequency
limit of the output signal. The LO setting provides the user with
flux density readings on the display or from the communications
port as well as an analog output signal from the output connector.
The use of the LO mode will reduce the rate at which the display
is updated with new readings. The LO setting is usable at
frequencies from 0 - 1 kHz.
In the HI setting the display is disabled, showing only the
“ANALOG ON” and “HI” legends (see Figure 3-20). Only an
analog output signal is available in this mode but the accuracy of
this signal is much better at higher frequencies.
3-33

OPERATING INSTRUCTIONS
Figure 3-20
LO and HI Analog Output Displays
When using the AUTO range and the analog output features
together the following situation can occur. Suppose the present
range is 3 kG and the present reading is +2.8 kG. The analog
output will be +2.8 Vdc. The signal then increases to +3.2 kG,
which would force an automatic change to the 30 kG range
setting. The analog output will now be +0.32 Vdc because of the
range change. This can lead to problems if the analog signal is
being used to make decisions because there is no indication that
a range change has occurred. In these situations it is best to
select a fixed range that covers the expected flux density span.
The analog output will be set to 0 Vdc whenever the FUNCTION
selector is turned to the RANGE, HOLD, MODE, UNITS or
OUTPUT position.
The analog output signal contains both the dc and ac
components of the flux density signal. This means that it will also
contain any initial dc offsets in the probe and the meter’s circuitry.
These offsets can be removed by the ZERO function.
The ZERO function can also be used to introduce a dc offset if
desired. This is useful when observing ac waveforms in which
one portion of the waveform is being clipped because it exceeds
the ±4.25 Vdc limit of the meter. Using the ZERO function the
3-34

OPERATING INSTRUCTIONS
center of the waveform can be moved to reduce or eliminate the
clipping, as depicted in the next figure.
Figure 3-21
Adjusting the DC Offset of the Analog Output
SOURCES OF MEASUREMENT ERRORS
When making flux density measurements there are several
conditions that can introduce errors:
1) Operating the meter while the LOW BATTERY symbol
appears.
Instrument specifications are not guaranteed when a low
battery condition exists !
2) Failure to zero the error signals from the meter, probe and
nearby sources of magnetic interference.
3-35

OPERATING INSTRUCTIONS
3) Subjecting the probe to physical abuse.
Handle the Hall probe with care. Do not bend the stem or
apply pressure to the probe tip as damage may result. Use
the protective cover when the probe is not in use.
4) One of the most common sources of error is the angular
position of the probe with respect to the field being measured.
As mentioned in Section-1, a Hall generator is not only sensitive
to the number of flux lines passing through it but also the angle at
which they pass through it. The Hall generator produces the
greatest signal when the flux lines are perpendicular to the
sensor as shown in Figure 3-22.
Figure 3-22
Probe Output versus Flux Angle
The probe is calibrated and specified with flux lines passing
perpendicularly through the Hall generator.
5) As shown in Figure 3-23 the greater the distance between the
magnetic source and the Hall probe the fewer flux lines will pass
through the probe, causing the probe’s output to decrease.
3-36

OPERATING INSTRUCTIONS
Figure 3-23
Probe Output versus Distance
6) Flux density can vary considerably across the pole face of a
permanent magnet. This can be caused by internal physical
flaws such as hairline cracks or bubbles, or an inconsistent mix of
materials. Generally the sensitive area of a Hall generator is
much smaller than the surface area of the magnet, so the flux
density variations are very apparent. Figure 3-24 illustrates this
situation.
Figure 3-24
Flux Density Variations in a Magnet
3-37

OPERATING INSTRUCTIONS
7) Using more than one extension cable can result in
measurement errors. In some cases the meter may report an
error. Total cable length between the meter and the probe
connector should not exceed 2.1 m (7 ft).
The use of more than one extension cable can result in
measurement errors and increase susceptibility to radio
frequency interference (RFI).
8) The accuracies of the meter and probe are effected by
temperature variations. Refer to the SPECIFICATIONS section
for specific information.
MORE DETAILS ON AC MODE OPERATION
It is possible for the flux density signal to contain both a dc
component and an ac component. In the ac mode the value
displayed is the true rms value of the waveform with its dc
component removed. However if the dc component is too high it
may force the peak value of the waveform to exceed the
electrical limits of the meter, causing the waveform to clip and
introducing errors in the final reading. This can also lead to an
overrange condition on the display and can lead to erratic
behavior if the AUTO range feature is being used. The presence
of a clipped ac signal can be verified by observing the analog
output signal.
As stated in the SPECIFICATIONS section the accuracy of the
true rms reading is only guaranteed for readings greater than
about 3.3% of the full scale range. For example this would be
1mT on the 300 mT range. When the reading falls below 3.3% of
full scale the “AC” legend on the display will flash, as shown in
3-38

OPERATING INSTRUCTIONS
Figure 3-25. This is intended to remind the user that the reading
may not be accurate. Select a lower range if possible to regain
accuracy.
Figure 3-25
Low AC Signal Indication
An ac reading, being a true rms value, has no polarity. However
when using the RELATIVE function in the ac mode readings can
be negative. A negative ac reading means that the present
reading is less than the RELATIVE value. An unsigned value
means the present reading is greater than or equal to the
RELATIVE value. For example if the original RELATIVE value
was 100 mT and the present field is 80 mT the result will be
-20 mT.
When using the MIN HOLD function without the RELATIVE
function turned on the minimum reading will be 0.0. With the
RELATIVE function turned on the minimum reading can reach the
negative full scale limit of the meter.
3-39

OPERATING INSTRUCTIONS
MORE DETAILS ON DC MODE OPERATION
It is possible for the flux density signal to contain both a dc
component and an ac component. In the dc mode this can lead
to instable readings. If the peak value of the ac component
reaches the electrical limits of the meter, even though the
average dc level is within the limits, an overrange condition may
appear on the display. This situation can also lead to erratic
behavior if the AUTO range feature is being used.
The presence of an ac signal can be verified by observing the
analog output signal or by using the ac mode to determine the
magnitude of the ac component.
3-40

Section 4
Remote Operation
RS-232 INTERFACE PARAMETERS
Prior to using the RS-232 serial port several parameters such as
baud rate and character length must be set on the computer or
PLC to match that of the meter. The meter’s parameters cannot
be changed. These are:
BAUD RATE: 2400
CHARACTER LENGTH: 8
PARITY: NONE
STOP BITS: 1
RS-232 INTERFACE CONNECTION
EMC APPLICATION NOTE:
Use only high quality, double shielded cables for RS-232
connection. Keep the length of the cables less than 3 meters.
Long cables (>3m) with insufficient EMI shielding can cause
excessive emissions or may be susceptible to external
interference.
The interface connector is a standard 9-pin “D” type connector
commonly used on personal computers. Five signals are
supported as shown in Figure 4-1. One of these is the common
(ground) connection. Pins-1,4,6 and 9 are not connected.
4-1

REMOTE OPERATION
Figure 4-1
9-Pin Interface Connector
Data is transmitted to the meter on the receive (RX) line. Data is
transmitted from the meter on the transmit (TX) line. This is
known as a “full duplex” link.
In some RS-232 applications two lines called Clear-To-Send
(CTS) and Request-To-Send (RTS) are used to control the flow
of data between devices. This is often referred to as “hardware
handshaking”. However, although these signals are connected
electrically within the meter, the signals are not presently used.
The user’s computer or PLC should be configured to ignore
hardware handshaking lines.
In most cases a straight-through cable can be used between the
meter and a personal computer. In other words Pin-1 on the
meter would attach to Pin-1 on the computer, Pin-2 to Pin-2, etc.
Figure 4-2 depicts two possible connection schemes.
4-2

REMOTE OPERATION
Figure 4-2
Serial Port Connection Schemes
Generally most communications problems are caused by
incorrect wiring or failure to match the characteristics (baud rate,
parity, etc.). Consult the documentation for the computer or PLC
to determine the signal assignments for its communication
connector. Again, the hardware handshake lines RTS and CTS
are not supported and should be ignored.
REMOTE COMMAND STANDARDS
Prior to 1987 most instruments that featured RS-232 communi-
cations interfaces had their own unique commands for
exchanging information. Eventually some manufacturers began
offering models that recognized other manufacturer’s commands
so that customers could easily switch over without making
extensive changes to their programs.
The IEEE-488-1987.2 standard (also called “IEEE-488.2”) was
one step toward creating a universal way to communicate with
any instrument, regardless of the manufacturer or the type of
instrument used. This was later enhanced by the SCPI-1991
4-3

REMOTE OPERATION
standard (Software Commands for Programmable Instruments),
which defined specific commands and responses that covered a
broad range of applications. Though these standards were
targeted for use with the IEEE-488 instrumentation bus they are
commonly used with serial (RS-232) interfaces as well.
The Model 5080 supports many of the IEEE-488-1987.2
“common” commands as well as a subset of the SCPI-1991
commands.
COMMAND FORMAT
All commands consist of ASCII character strings. Some
commands contain numeric parameters that are used to set or
reset individual bits within binary registers. For instance a value
of 45 decimal is the same as binary 101101, thus setting bits 5, 3,
2 and 0 in the register and resetting all others. Sending the value
“00101101” would be interpretted as the number 101,101.
NOTE: No more than 500 characters can be sent in one
command string.
MESSAGE TERMINATORS
When transmitting a string to the instrument the message must
be “terminated” properly to notify the instrument that the message
is complete. This is done by appending an ASCII line feed (LF)
character as the final character in the string, which is a 0A hex or
00001010 binary. Note that 0A hex is equivalent to 10 decimal,
but sending the two ASCII characters “10” will not work. It must
be the single byte representation of the LF control character.
The meter will always send the LF character every time it
transmits a message to the host system.
4-4

REMOTE OPERATION
ERROR BUFFER
Errors are generated by a variety of sources, such as hardware
errors or errors in the command syntax. If an error occurs a
message is stored in an ERROR BUFFER. The message can be
retrieved by a specific command discussed later in this section.
STATUS REGISTERS
There are four register sets that indicate the status of the
instrument, such as errors or the present state of the meter.
These are 8-bit registers, but in many cases not all of the bits are
used. The four register sets are called
MEASUREMENT EVENT
OPERATION EVENT
STANDARD EVENT
QUESTIONABLE EVENT
There is also an 8-bit register that provides a 1-bit summary for
each of the four register sets. This is called the STATUS BYTE.
Each register set consists of three individual registers, as
depicted in Figure 4-3.
1) The CONDITION register is a real time, read-only register that
is constantly updated to reflect current operating conditions.
2) The EVENT register is fed by the CONDITION register, but
operates as a latch. Whenever any bit in the CONDITION
register goes to “1”, a corresponding “1” is latched into the
EVENT register and remains that way until cleared by a specific
command.
4-5

REMOTE OPERATION
3) The ENABLE register is a mask register that is used to
generate the single status bit for the STATUS BYTE. Setting any
bit in the ENABLE register to “1” will allow a corresponding “1” in
the EVENT register to set the summary bit in the STATUS BYTE.
Figure 4-3
Condition, Event and Enable registers
STATUS BYTE AND REQUEST FOR SERVICE (RQS)
A bit in the STATUS BYTE called RQS (request for service) sets
whenever an event occurs that requires the attention of the
computer. The RQS bit can set if any of the summary bits from
the MEASUREMENT EVENT, OPERATION EVENT, STANDARD
EVENT or QUESTIONABLE EVENT registers are set, or if an
error message exists. The STATUS ENABLE register is a mask
register that is used to allow any of these conditions to set the
RQS bit. Setting any bit in the STATUS ENABLE register to “1”
will allow a corresponding “1” in the STATUS BYTE register to set
the RQS bit. These registers are depicted in Figure 4-4.
4-6

Status Byte and Enable registers
OSB -
Operation
Summary Bit:
ESB -
Event
Summary Bit:
QSB -
Questionable
REMOTE OPERATION
Figure 4-4
If any of the bits in the OPERATION
EVENT register set, and their respective
enable bits are set, the Operation
Summary Bit (OSB) will set.
If any of the bits in the STANDARD
EVENT register set, and their respective
enable bits are set, the Event Summary
Bit (ESB) will set.
If any of the bits in the QUESTIONABLE
EVENT register set, and their respective
4-7

REMOTE OPERATION
Summary Bit: enable bits are set, the Questionable
Summary Bit (QSB) will set.
MSB -
Measurement
Summary Bit:
If any of the bits in the MEASUREMENT
EVENT register set, and their respective
enable bits are set, the Measurement
Summary Bit (MSB) will set.
EAV -
Error Available:
This bit sets any time there is an error
message available in the error buffer.
RSQ -
Request For
Service:
If any of the other bits in the STATUS
BYTE are set, and their respective
enable bits are set in the STATUS
ENABLE register, the Request For
Service (RQS) will set.
4-8

REMOTE OPERATION
STANDARD EVENT REGISTER
If any of these bits set, and their respective enable bits are set,
the Event Summary Bit (ESB) will set in the STATUS BYTE.
Figure 4-5
Standard Event register
PON -
Power On:
Indicates that the meter was turned off
and on since the last communication.
CME -
Command Error:
Indicates that there was a syntax or
spelling error in the command, or the
command received is not supported.
EXE -
Execution Error:
Indicates that the meter detected an
error while attempting to execute a
command.
DDE -
Device Dependent
Error:
Indicates that the meter did not operate
properly due to some internal error.
OPC -
Operation Complete:
Indicates that all requested operations
have been completed.
4-9

REMOTE OPERATION
MEASUREMENT EVENT REGISTER
If any of these bits set, and their respective enable bits are set,
the Measurement Summary Bit (MSB) will set in the STATUS
BYTE.
Figure 4-6
Measurement Event register
ROF -
Reading Overflow:
Indicates that the present reading
exceeds the present measurement
range.
RAV -
Reading Available:
Indicates a reading was acquired and
processed.
OPERATION EVENT REGISTER
If any of these bits set, and their respective enable bits are set,
the Operation Summary Bit (OSB) will set in the STATUS BYTE.
Figure 4-7
Operation Event register
MEAS -
Measure mode:
Indicates the meter is in the process of
acquiring and processing a reading.
4-10

REMOTE OPERATION
QUESTIONABLE EVENT REGISTER
If any of these bits set, and their respective enable bits are set,
the Questionable Summary Bit (QSB) will set in the STATUS
BYTE.
Figure 4-8
Questionable Event register
CAL -
Calibration summary:
Indicates that an invalid calibration
constant was detected during power up
or when the probe was installed. The
instrument will instead use a default
parameter. This bit will clear once the
meter and probe have been successfully
calibrated.
NOTE: Meter specifications are not
guaranteed when the CAL bit is set !
“COMMON” COMMAND SYNTAX
The “common” commands are recognized and acted upon in a
similar manner by all instruments that follow the IEEE-488.2
standard, whether a DVM, scope, frequency meter, gaussmeter,
etc. These are the syntax rules:
1) A common command always begins with an asterisk character
(*) followed by a three or four character acronym and possibly
one other parameter. For instance the command to clear the
event registers is *CLS.
4-11

REMOTE OPERATION
2) The commands are not case sensitive. For instance the *CLS,
*cls and *cLS commands are identical.
3) If there is a fourth character in the acronym it will always be a
question mark (?) and indicates that information is being
requested from the instrument. For instance a command to read
the model number and manufacturer of the instrument is *IDN?.
4) If a parameter follows a command it must be separated from
the acronym by one space. The parameter is the ASCII
representation of an integer. For instance if the parameter to be
sent is binary 1100, the actual parameter sent would be the two
ASCII characters 12, since binary 1100 = decimal 12. If you were
to send the four ASCII characters 1100 it would be interpreted as
decimal 1100 (eleven hundred).
5) A number returned from the instrument is an ASCII
representation of a number. For instance if the instrument
returns the ASCII string 345 the number is decimal 345 (three
hundred forty five), which translates to 159 hex.
6) Multiple commands can be sent in one string. The commands
must be separated by semicolons (;). For instance, *CLS;*IDN?
first clears the event registers and then requests model and
manufacturer information. If more than one of the commands in
the string requests information from the instrument, the
instrument’s response will also have semicolons separating the
responses, such as 345;0;10.
4-12

REMOTE OPERATION
“COMMON” COMMANDS
ACRONYM NAME BRIEF DESCRIPTION
*CLS Clear status Clear all event registers
and error buffer.
*ESE <NRf> Program event
enable
Program standard event
enable register.
*ESE? Event enable query Read standard event
enable register.
*ESR? Event status query Read standard event
register and clear it.
*IDN? Identification query Return manufacturer,
model number, software
version number.
*OPC Set operation
complete
Set the Operation
Complete bit in the
standard event register
after all commands have
been executed.
*OPC? Operation complete
query
Returns an ASCII “1” after
all commands have been
executed.
*OPT? Option identification
query
*SRE <NRf> Program Status
enable
Returns information about
the attached Hall probe.
Program STATUS enable
register.
*SRE? Status enable query Read STATUS enable
register.
*STB? Status byte query Read status byte register.
Table 4-1
Common command summary
4-13

REMOTE OPERATION
*CLS -
CLEAR STATUS
*ESE <NRf> PROGRAM
STANDARD EVENT
ENABLE
REGISTER
*ESE? STANDARD EVENT
ENABLE
REGISTER QUERY
*ESR? STANDARD EVENT
REGISTER QUERY
*IDN? IDENTIFICATION
QUERY
*OPC - SET
OPERATION
COMPLETE
Clears the MEASUREMENT EVENT,
OPERATION EVENT, STANDARD
EVENT and QUESTIONABLE EVENT
registers, but not their enable registers. It
also clears the error buffer.
A set bit in the STANDARD EVENT
ENABLE register allows its corresponding
event to set the ESB (event summary bit)
in the STATUS BYTE register. <NRf> is
an ASCII string representing an integer
mask. For instance a value of 45 decimal
is the same as binary 00101101, thus
setting bits 5, 3, 2 and 0 in the enable
register.
Returns the contents of the STANDARD
EVENT ENABLE register.
Returns the contents of the STANDARD
EVENT register.
NOTE: The STANDARD EVENT register
is cleared after an *ESR? command.
Returns the following string: F.W.BELL,
MODEL 5080,Rx.x. The Rx.x string is the
firmware revision level, where x.x is a
decimal number, such as 1.1.
Causes the OPC (operation complete) bit
to set in the STANDARD EVENT register
when all commands have been executed.
4-14

*OPC? OPERATION
COMPLETE
QUERY
*OPT? -
OPTION
IDENTIFICATION
QUERY
*SRE <NRf> PROGRAM
STATUS ENABLE
REGISTER
*SRE? -
STATUS ENABLE
REGISTER QUERY
REMOTE OPERATION
Causes the OPC (operation complete) bit
to set in the STANDARD EVENT register
and returns an ASCII “1” when all
commands have been executed.
Returns a string that identifies the model
number and serial number of the Hall
probe. The model number will always be
12 characters in length including trailing
spaces, such as STD58-0404. Following
the model number will be a comma (,).
Next will be the serial number, which will
always be ten characters in length
including trailing spaces, such as
9623004. If no probe is attached or can’t
be identified the string will default to
“UNDEFINED ,0”.
A set bit in the STATUS ENABLE register
allows its corresponding event to set the
RQS (request for service) in the STATUS
BYTE register. <NRf> is an ASCII string
representing an integer mask. For
instance a value of 45 decimal is the
same as binary 00101101, thus setting
bits 5, 3, 2 and 0 in the enable register.
Returns the contents of the STATUS
ENABLE register.
4-15

REMOTE OPERATION
*STB? -
STATUS BYTE
QUERY
Returns the contents of the STATUS
BYTE register.
NOTE: The STATUS BYTE register is not
cleared after an *STB? command. Other
registers and buffers must be cleared for
the bits in the STATUS BYTE register to
be cleared.
SCPI COMMAND SYNTAX
The SCPI commands go one step farther than IEEE-488.2 and
provide a language protocol and defines a standard set of
commands to program every aspect of the instrument. These are
the syntax rules:
1) The first character of any command string is a colon (:).
2) The commands are not case sensitive. For instance the
:MEASURE, :measure and :MEASure commands are identical.
3) A question mark (?) in a command means that the command is
requesting information from the instrument. This is called a query
command.
4) For any command there is a short and long spelling of the
command. Use the following rules for the short version:
a) If the length of the command is four letters or less,
there is no short version.
4-16

REMOTE OPERATION
b) If the command has more than four letters and the
fourth letter is a vowel, drop it and all letters that follow it. For
instance the command :RESET can be shortened to :RES.
c) If the command has more than four letters and the
fourth letter is a consonant, drop all letters that follow it. For
instance the command :MEASURE can be shortened to :MEAS.
d) If the command contains a question mark (?) or a nonoptional parameter it must be included after the short form
version. For instance a query command of :CONDITION? can be
shortened to :COND?.
e) The use of anything other than the short or long version
of a command is not permitted. For instance both the
:MEASURE and :MEAS commands are acceptable, but :MEASU
is not.
5) If a parameter follows a command it must be separated from
the command by one space.
6) Multiple commands can be sent in one string. The commands
must be separated by semicolons (;). A colon (:) must still
precede each command. If more than one of the commands in
the string requests information from the instrument, the
instrument’s response will also have semicolons separating the
responses, such as 345;0;10.
4-17

REMOTE OPERATION
SCPI COMMANDS
In the following discussion the commands are written such that
the short form of the command is written in UPPER CASE letters
and the remainder of the command is written in lower case
letters. Either form can be used.
If parameters are required they will appear within <> brackets.
An <n> parameter is a single ASCII digit. <NRf> is usually a
multiple digit number.
The meter supports a subset of the available SCPI commands.
However, there are some functions that are not supported with
standard SCPI commands. In these cases these special
commands are patterned after other SCPI commands that are
similar in function.
ERROR MESSAGE COMMANDS DESCRIPTION
:SYSTem:ERRor? Retrieve error
message
:SYSTem:CLEar Clear error message
STATUS REGISTER COMMANDS DESCRIPTION
:STATus:MEASurement:EVENt? Query Measurement
Event reg.
:STATus:OPERation:EVENt? Query Operation Event
reg.
:STATus:QUEStionable:EVENt? Query Questionable
Event reg.
:STATus:MEASurement:ENABle <NRf> Program Measurement
Event Enable reg.
Table 4-2
SCPI Command summary
4-18

REMOTE OPERATION
:STATus:OPERation:ENABle <NRf> Program Operation
Event Enable reg.
:STATus:QUEStionable:ENABle <NRf> Program Questionable
Event Enable reg.
:STATus:MEASurement:ENABle? Query Measurement
Event Enable reg.
:STATus:OPERation:ENABle? Query Operation Event
Enable reg.
:STATus:QUEStionable:ENABle? Query Questionable
Event Enable reg.
:STATus:MEASurement:CONDition? Query Measurement
Condition reg.
:STATus:OPERation:CONDition? Query Operation
Condition reg.
:STATus:QUEStionable:CONDition? Query Questionable
Condition reg.
:STATus:PRESet Clear all event
registers.
MODE COMMANDS DESCRIPTION
:UNIT:FLUX:AC:GAUSs Program ac gauss
mode
:UNIT:FLUX:AC:TESLa Program ac tesla mode
:UNIT:FLUX:AC:AM Program ac amp-meter
mode
:UNIT:FLUX:DC:GAUSs Program dc gauss
mode
:UNIT:FLUX:DC:TESLa Program dc tesla mode
Table 4-2 (cont.)
SCPI Command summary
4-19

REMOTE OPERATION
:UNIT:FLUX:DC:AM Program dc A-M mode
:UNIT:FLUX? Query mode setting
RANGE COMMANDS DESCRIPTION
:SENSe:FLUX:RANGe:AUTO Program auto range
:SENSe:FLUX:RANGe <n> Program fixed range
:SENSe:FLUX:RANGe? Query range setting
HOLD COMMANDS DESCRIPTION
:SENSe:HOLD:STATe <n> Program hold mode
:SENSe:HOLD:STATe? Query hold mode
setting
:SENSe:HOLD:RESet Reset presently held
value
ZERO / RELATIVE COMMANDS DESCRIPTION
:SYSTem:AZERo Initiates an automatic
zero operation
:SYSTem:ARELative:STATe <n> Program relative mode
:SYSTem:ARELative:STATe? Query relative mode
setting
MEASUREMENT COMMANDS DESCRIPTION
:MEASure:FLUX? Obtain flux density
reading.
ANALOG OUTPUT COMMANDS DESCRIPTION
:SYSTem:OUT <n> Enable / disable
analog output.
Table 4-2 (cont.)
SCPI Command summary
4-20

REMOTE OPERATION
ERROR MESSAGES AND COMMANDS
If an error occurs a message is placed in the error buffer. The
message will contain a number, a comma (,) and a brief
description of the error. Negative (-) numbers are used for SCPI
defined messages while positive (+) numbers relate specifically to
the meter.
Each time the buffer is read the error message is removed from
the buffer. If no error exists the message “0, No error” will be
returned. However, if the buffer contains any other message,
and a new error occurs before the old one is read or cleared, the
new message will be lost.
There are certain error status bits that will set in the STANDARD
EVENT register. These bits provide general error indications.
The error message will provide more detailed information about
the errors.
The error buffer can be read and cleared with the following
commands:
:SYSTem:ERRor?
Returns the error message and clears the
error buffer.
:SYSTem:CLEar
Clears the error buffer.
If the meter detects an error in the command string (a spelling
error, a command that is not supported or a numerical value that
is incorrect) the meter will not execute the command. If the error
is detected in the middle of a multiple command string the
command that contains the error and all commands that follow
will not be executed. The user’s program should always check
the STATUS BYTE to determine if an error has occurred.
The possible error messages are:
4-21

REMOTE OPERATION
0, NO ERROR
-201, NOT IN MEASURE MODE
-120, NUMERIC DATA ERROR
-224, ILLEGAL PARAMETER ERROR
-363, INPUT BUFFER OVERRUN
-103, INVALID SEPARATOR
-102, SYNTAX ERROR
-100, COMMAND ERROR
4-22

REMOTE OPERATION
STATUS COMMANDS
The STATUS commands control and query the MEASUREMENT
EVENT, OPERATION EVENT and QUESTIONABLE EVENT
registers.
:STATus:MEASurement:EVENt?
:STATus:OPERation:EVENt?
:STATus:QUEStionable:EVENt?
Returns the contents
of the specified
EVENT register, then
clears the register
contents.
:STATus:MEASurement:ENABle <NRf>
:STATus:OPERation:ENABle <NRf>
:STATus:QUEStionable:ENABle <NRf>
Programs the
specified EVENT
ENABLE register
with the value
<NRf>. <NRf> is an
ASCII string
representing an
integer mask. For
instance a value of
45 decimal is the
same as binary
00101101, thus
setting bits 5, 3, 2
and 0 in the enable
register.
:STATus:MEASurement:ENABle?
:STATus:OPERation:ENABle?
:STATus:QUEStionable:ENABle?
Returns the contents
of the specified
EVENT ENABLE
register.
4-23

REMOTE OPERATION
:STATus:MEASurement:CONDition?
:STATus:OPERation:CONDition?
:STATus:QUEStionable:CONDition?
:STATus:PRESet
Returns the contents
of the specified
EVENT CONDITION
register. The EVENT
CONDITION register
is a real-time register
reflecting the state of
the meter at the time
of the read. Some
conditions could
happen very quickly
and could be missed
by this query. It is
often better to rely on
the contents of the
EVENT register since
it latches the event
until cleared by a
specific command.
Clears all EVENT
ENABLE registers.
4-24

REMOTE OPERATION
MODE COMMANDS
These commands select readings in either GAUSS, TESLA or
AMP-METERS, and flux density readings for either static fields
(dc) or alternating fields (ac). See Section-3 for more information.
NOTE: These commands will not be executed unless the
function selector switch is in the MEASURE position.
:UNIT:FLUX:AC:GAUSs
Specifies ac flux density readings in
gauss.
:UNIT:FLUX:AC:TESLa
Specifies ac flux density readings in
tesla.
:UNIT:FLUX:AC:AM
Specifies ac flux density readings in
amp-meters.
:UNIT:FLUX:DC:GAUSs
Specifies dc flux density readings in
gauss.
:UNIT:FLUX:DC:TESLa
Specifies dc flux density readings in
tesla.
:UNIT:FLUX:DC:AM
Specifies dc flux density readings in
amp-meters.
:UNIT:FLUX?
Returns an ASCII string
representing the present mode
setting for the meter. The ASCII
string can be DC GAUSS, AC
GAUSS, DC TESLA, AC TESLA,
AC AM or DC AM.
4-25

REMOTE OPERATION
RANGE COMMANDS
These commands select either a fixed range or AUTO range. See
Section-3 for more information.
NOTE: These commands will not be executed unless the
function selector switch is in the MEASURE position.
:SENSe:FLUX:RANGe:AUTO
Selects the AUTO RANGE
function.
:SENSe:FLUX:RANGe <n>
Selects a fixed range <n>,
where n =
0 for 300 G / 30 mT / 23.88 kAm
1 for 3 kG / 300 mT / 238.8 kAm
2 for 30 kG / 3 T / 2388 kAm
:SENSe:FLUX:RANGe?
Returns an ASCII digit
representing the present range
setting for the meter, as follows:
0 for 300 G / 30 mT / 23.88 kAm
1 for 3 kG / 300 mT / 238.8 kAm
2 for 30 kG / 3 T / 2388 kAm
4-26

REMOTE OPERATION
HOLD COMMANDS
These commands select one of the HOLD modes or resets the
presently held reading. See Section-3 for more information.
NOTE: These commands will not be executed unless the
function selector switch is in the MEASURE position.
:SENSe:HOLD:STATe <n>
Selects the HOLD function, where
<n> is a single ASCII digit, as
follows:
0 = All HOLD modes turned off.
1 = MIN HOLD on.
2 = MAX HOLD on.
3 = PEAK HOLD on.
:SENSe:HOLD:STATe?
Returns an ASCII digit
representing the present HOLD
mode setting, as follows:
0 = All HOLD modes turned off.
1 = MIN HOLD on.
2 = MAX HOLD on.
3 = PEAK HOLD on.
:SENSe:HOLD:RESet
This command resets the presently
held reading.
4-27

REMOTE OPERATION
ZERO COMMAND
This command initiates an automatic ZERO operation. See
Section-3 for more information.
NOTE: This command will not be executed unless the
function selector switch is in the MEASURE position.
:SYSTem:AZERo
Automatic zeroing is initiated upon receipt
of this command.
RELATIVE COMMANDS
These commands control the RELATIVE function. See
Section-3 for more information.
NOTE: These commands will not be executed unless the
function selector switch is in the MEASURE position.
:SYSTem:ARELative:STATe <n>
The relative function is turned
off when <n> is 0. When
<n> is 1 the relative function
is turned on, using the
previously generated relative
value, if any. When <n> is 2
the relative function is turned
on and an automatic relative
operation is initiated.
:SYSTem:ARELative:STATe?
Returns a single ASCII digit
indicating the on / off state of
the relative function. A 0
4-28

REMOTE OPERATION
indicates the relative function
is turned off. A 1 indicates
the relative function is turned
on.
MEASUREMENT COMMAND
This command acquires a new flux density reading.
NOTE: This command will not be executed unless the
function selector switch is in the MEASURE position.
:MEASure:FLUX?
This command returns the latest flux density
reading. The returned string will contain a
signed real number and a unit indicator (G,
T, or Am). If in the ac mode the reading will
not contain a polarity character (+ or -).
The ranges of possible readings for the
various units of measure are:
0.0G to 29990G
0.00000T to 2.999T
0Am to 2,388,000Am
4-29

REMOTE OPERATION
ANALOG OUTPUT COMMAND
This command enables or disables the ANALOG OUTPUT. See
Section-3 for more information.
NOTE: This command will not be executed unless the
function selector switch is in the MEASURE position.
:SYSTem:OUT <n>
Enables or disables the ANALOG
OUTPUT, where <n> is a single
ASCII digit, as follows:
0 = Analog output turned off.
1 = Analog output turned on, low
frequency mode.
2 = Analog output turned on, high
frequency mode.
4-30

REMOTE OPERATION
INTERMIXING “COMMON” AND SCPI COMMANDS
As mentioned earlier a string sent to the instrument can contain
more than one command as long as the commands are
separated by semicolons(;). “Common” and SCPI commands can
be intermixed. For instance the string
*CLS;:UNIT:FLUX:DC:TESLA;:MEASure:FLUX?
is valid, first clearing the instrument’s event and error registers,
then programming it to supply readings in tesla in the dc mode
and requesting the latest reading. The host system should be
prepared to receive the reading immediately after transmitting this
command string to the meter.
USING QUERY COMMANDS
When any query command is issued the meter will send its
response back immediately. However if a query command is part
of a multiple command string the meter will transmit the response
after all commands within the string have been executed. For
instance here is such a string:
:UNIT:FLUX:DC:GAUSS;:MEAS:FLUX?;:UNIT:FLUX:DC:TESLA;
:MEAS:FLUX? <LF>
In this string the meter is programmed for DC GAUSS mode and
a measurement is requested. Then the meter is programmed for
DC TESLA mode and another measurement is requested. When
the meter has finished executing the entire command string it will
transmit a string similar to this:
+1892G;+0.1892T;<LF>
4-31

REMOTE OPERATION
USING THE OPERATION COMPLETE STATUS
There are several ways to determine if the meter has executed a
command. If the command string contains a query command the
program can simply wait for the meter to transmit its response.
But if the query command contains an error the command may
never be executed. Further, some commands do not require a
response. The best way to handle all situations is to issue the
*OPC? command once prior to sending any other commands.
This will cause the meter to always transmit an ASCII “1” each
time it executes a command string. If the command string
contains one or more query commands, the “1” will be appended
to the end of the response separated by a semicolon (;). For
instance the response to the command string
*OPC?;:UNIT:FLUX:AC:GAUSS <LF>
would be “1;<LF>”, whereas the response to a command string
containing a query
*OPC?;:MEAS:FLUX? <LF>
might be “+221.3G;1;<LF>”.
4-32

REMOTE OPERATION
EXAMPLE PROGRAM
Of the many programming languages available such as C,
Pascal, BASIC, Fortran, etc., BASIC is probably the best known
and understood by the most people. For this reason the following
example program was written in Microsoft MS-DOS Q-BASIC
for 80x86 style personal computers.
The following program is provided as a guide for programmers
who wish to develop their own programs. It was written for clarity
and is not necessarily the most efficient in terms of speed or size.
Not all of the commands are demonstrated, but enough are used
to serve as a general guide for using the other commands.
DECLARE SUB METER.I.O (expect.response%, timeout%)
DIM SHARED METER.CMD$, METER.RESP$, METER.ERROR%
CLS
PRINT "*********************************************************************"
PRINT " RS-232 DEMONSTRATION PROGRAM FOR"
PRINT " F.W.BELL MODEL-5080 GAUSS / TESLA METER"
PRINT "*********************************************************************"
PRINT "This program demonstrates the use of the RS-232 serial port on an"
PRINT " F.W.BELL Model-5080 gauss / tesla meter. This Q-BASIC program"
PRINT " was intended for use on any 80x86 PC using the COM-2 serial port."
PRINT " To use another comm port change the OPEN statement near the start"
PRINT " of the program."
PRINT ""
PRINT "This program can be used to verify the connection between the meter"
PRINT " and computer as well as provide a template for system programmers"
PRINT " who wish to create their own programs. You can use a straight-thru"
PRINT " cable from the meter to the PC. See the user's manual for more"
PRINT " information."
PRINT
PRINT "Turn the meter on and place the function selector to the MEASURE "
PRINT " position. Press any key to continue...";
DO: LOOP UNTIL INKEY$ <> "": CLS
PRINT "Initializing COM2 port..."
OPEN "COM2:2400,N,8,1,CS,DS,CD" FOR RANDOM AS #1
4-33

REMOTE OPERATION
Now that the COM-2 port has been opened an attempt is made to
communicate with the meter. The *OPC? command is sent
which should cause the meter to send back a “1;”. If no response
is received an error message is displayed and the program is
terminated.
ON ERROR GOTO TRY.AGAIN
'============================
'Attempt to communicate with meter.
'============================
PRINT "Verifying interface..."
METER.CMD$ = "*OPC?": CALL METER.I.O(1, 1)
IF METER.ERROR% = 1 THEN
PRINT "Meter did not respond as requested. Please check your"
PRINT " interface cable. Make sure it is connected to the COM2"
PRINT " port on your computer."
END
END IF
Now that the communications link between meter and computer
has been established the I.D. information for the meter and probe
is requested and displayed.
'==========================================
'Request meter / probe I.D. information and display it.
'==========================================
PRINT "Retrieving meter I.D. information...": PRINT
METER.CMD$ = "*IDN?;*OPT?": CALL METER.I.O(1, 1)
POS1% = INSTR(METER.RESP$, ",")
PRINT "Manufacturer = "; LEFT$(METER.RESP$, POS1% - 1);
POS2% = INSTR(POS1% + 1, METER.RESP$, ",")
PRINT " Model = "; MID$(METER.RESP$, POS1%+1, (POS2% - POS1% - 1));
POS1% = INSTR(POS2% + 1, METER.RESP$, ";")
PRINT " Revision = "; MID$(METER.RESP$, POS2%+1, (POS1%-POS2%- 1))
POS2% = INSTR(POS1% + 1, METER.RESP$, ",")
PRINT "Probe Model = ";
PRINT MID$(METER.RESP$, POS1% + 1, (POS2% - POS1% - 1));
4-34

REMOTE OPERATION
POS1% = INSTR(POS2% + 1, METER.RESP$, ";")
PRINT " Probe Serial = ";
PRINT MID$(METER.RESP$, POS2% + 1, (POS1% - POS2% - 1))
PRINT
PRINT "Press any key to continue....."
DO: LOOP UNTIL INKEY$ <> "": CLS
The user is now instructed to insert the probe into the zero flux
chamber or any dc field lower than 30 mT (300G). The meter will
be instructed to perform an automatic zeroing, which will take
several seconds to complete. If the meter reports an error the
error message will be displayed.
'===============================
'Demonstrate the AUTO-ZERO function.
'===============================
PRINT "The automatic zeroing function will now be demonstrated."
PRINT
PRINT "Insert the probe into the zero flux chamber or in any magnetic"
PRINT " field less than 30 mT (300 G)."
PRINT
PRINT "Press any key when ready.....": PRINT
DO: LOOP UNTIL INKEY$ <> ""
PRINT "AUTO ZERO is in process...please wait...."
METER.CMD$ = ":SYSTEM:AZERO"
CALL METER.I.O(1, 15)
METER.CMD$ = ":SYSTEM:ERR?": CALL METER.I.O(1, 1)
POS1% = INSTR(METER.RESP$, ",")
IF VAL(LEFT$(METER.RESP$, POS1% - 1)) <> 0 THEN
CLS:BEEP
PRINT "The meter has reported an error of "; METER.RESP$
PRINT
PRINT "Press any key to continue....."
DO: LOOP UNTIL INKEY$ <> "": CLS
END IF
4-35

REMOTE OPERATION
The meter is now set to the dc tesla mode with a fixed range of
300 mT
.
'=====================================================
'Program meter for DC-TESLA measurement on the 300 mT range.
'=====================================================
CLS
PRINT "Programming meter for DC-TESLA mode, 300 mT range..."
METER.CMD$ = ":SYSTEM:CLEAR": CALL METER.I.O(1, 1)
METER.CMD$ = ":UNIT:FLUX:DC:TESLA;:SENSE:FLUX:RANGE 1"
CALL METER.I.O(1, 2)
Flux density readings are acquired and displayed on a continuous
basis. The user can move the probe in and out of a magnetic
field in order to observe the changes in the flux density readings.
'======================================================
‘Acquire measurements and display them until the user presses a key.
‘======================================================
LOCATE 10, 1
PRINT "Move the probe near a dc magnetic field and observe the
PRINT " change in the present flux density reading."
PRINT
PRINT "Press any key when finished....."
DO
METER.CMD$ = "MEAS:FLUX?": CALL METER.I.O(1, 2)
POS1% = INSTR(METER.RESP$, ";")
LOCATE 15, 15
PRINT "Present flux density = "; LEFT$(METER.RESP$, POS1% - 1)
METER.CMD$ = ":SYSTEM:ERR?": CALL METER.I.O(1, 1)
POS1% = INSTR(METER.RESP$, ",")
IF VAL(LEFT$(METER.RESP$, POS1% - 1)) <> 0 THEN
CLS: BEEP
POS1% = INSTR(METER.RESP$, ";")
PRINT "The meter has reported an error of ";
PRINT LEFT$(METER.RESP$, POS1% - 1)
PRINT
PRINT "Press any key to continue....."
4-36

REMOTE OPERATION
DO: LOOP UNTIL INKEY$ <> ""
EXIT DO
END IF
LOOP UNTIL INKEY$ <> ""
END
TRY.AGAIN:
RESUME NEXT ‘Comm error trap.
This subroutine handles the communications between the meter
and the computer. The header contains specific information.
SUB METER.I.O (expect.response%, timeout%)
'=====================================================
' METER INPUT / OUTPUT SUBROUTINE
'=====================================================
' This subroutine transmits the contents of the global buffer
' <METER.CMD$> to the meter, followed by the line feed terminator.
'
' If the variable <expect.response%> is non-zero, the subroutine will
' wait for a response from the meter and store it in the global buffer
' <METER.RESP$>. The program will wait for <timeout%> seconds for
' a response. If no response is received the command will be issued
' again. If still no response the global variable <METER.ERROR%> will
' be set to 1 and a normal return will be made.
'=====================================================
RETRY = 2: METER.ERROR% = 0 'Clear error flag.
DO UNTIL EOF(1) = -1
METER.RESP$ = INPUT$(LOC(1), #1) 'Remove any residual bytes
LOOP ' from the input buffer.
SEND.COMMAND:
METER.RESP$ = "" 'Null response buffer.
PRINT #1, METER.CMD$ + CHR$(10); 'Send command string
' followed by a line feed.
IF expect.response% = 0 THEN EXIT SUB 'Return if no response
‘ expected.
4-37

REMOTE OPERATION
RESET.TIMER:
START.TIME = TIMER
'Store as many characters as are in the input buffer. If one of them
' is the line feed character return to caller with the response in the
' <METER.RESP$> buffer. If no response is received within ‘<timeout%>
seconds, try again. If still no response, set ‘<METER.ERROR%> to non-zero
and return.
LOOK.FOR.INPUT:
IF EOF(1) = -1 THEN
IF (TIMER - START.TIME) > timeout% THEN
RETRY = RETRY - 1
IF RETRY <> 0 THEN 'Send command one more time.
GOTO SEND.COMMAND
ELSE
METER.ERROR% = 1 'Report an error if no response.
EXIT SUB
END IF
ELSE
GOTO LOOK.FOR.INPUT
END IF
ELSE
METER.RESP$ = METER.RESP$ + INPUT$(LOC(1), #1)
IF (INSTR(METER.RESP$, CHR$(10))) = 0 THEN GOTO
RESET.TIMER
EXIT SUB
END IF
END SUB
4-38

WARRANTY
This instrument is warranted to be free of defects in material and workmanship.
Sypris Test & Measurement’s obligation under this warranty is limited to
servicing or adjusting any instrument returned to the factory for that purpose,
and to replace any defective parts thereof. This warranty covers instruments
which, within one year after delivery to the original purchaser, shall be returned
with transportation charges prepaid by the original purchaser, and which upon
examination shall disclose to Sypris Test & Measurement’s satisfaction to be
defective. If it is determined that the defect has been caused by misuse or
abnormal conditions of operation, repairs will be billed at cost after submitting
an estimate to the purchaser.
Sypris Test & Measurement reserves the right to make changes in design at any
time without incurring any obligation to install same on units previously
purchased.
THE ABOVE WARRANTY IS EXPRESSLY IN LIEU OF ALL OTHER
WARRANTIES EXPRESSED OR IMPLIED AND ALL OTHER OBLIGATIONS
AND LIABILITIES ON THE PART OF SYPRIS TEST & MEASUREMENT, AND
NO PERSON INCLUDING ANY DISTRIBUTOR, AGENT OR
REPRESENTATIVE OF SYPRIS TEST & MEASUREMENT IS AUTHORIZED
TO ASSUME FOR SYPRIS TEST & MEASUREMENT ANY LIABILITY ON ITS
BEHALF OR ITS NAME, EXCEPT TO REFER THE PURCHASER TO THIS
WARRANTY. THE ABOVE EXPRESS WARRANTY IS THE ONLY
WARRANTY MADE BY SYPRIS TEST & MEASUREMENT. SYPRIS TEST &
MEASUREMENT DOES NOT MAKE AND EXPRESSLY DISCLAIMS ANY
OTHER WARRANTIES, EITHER EXPRESSED OR IMPLIED, INCLUDING
WITHOUT LIMITING THE FOREGOING, WARRANTIES OF
MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE OR
ARISING BY STATUE OR OTHERWISE IN LAW OR FROM A COURSE OF
DEALING OR USAGE OR TRADE. THE EXPRESS WARRANTY STATED
ABOVE IS MADE IN LIEU OF ALL LIABILITIES FOR DAMAGES, INCLUDING
BUT NOT LIMITED TO CONSEQUENTIAL DAMAGES, LOST PROFITS OR
THE LIKE ARISING OUT OF OR IN CONNECTION WITH THE SALE,
DELIVERY, USE OR PERFORMANCE OF THE GOODS. IN NO EVENT WILL
SYPRIS TEST & MEASUREMENT BE LIABLE FOR SPECIAL, INDIRECT OR
CONSEQUENTIAL DAMAGES EVEN IF SYPRIS TEST & MEASUREMENT
HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES.
This warranty gives you specific legal rights, and you may also have other rights
that vary from state to state.
5-1

6120 Hanging Moss Road
Orlando, Fl 32807
Phone: 407-678-6900
Fax: 407-677-5765
 Loading...
Loading...