

Page 1

Operating Manual
FUTEK Rotary Torque Sensors
TRD/ TRH/ TRS 600/605/705 Series
Page 2
Table of Content
1. IMPORTANT INFORMATION.............................................................................................................. 3
1.1 D
2. APPLICATION AND KEY FEATURES................................................................................................ 4
3. DESCRIPTION OF THE MEASURING SYSTEM .............................................................................. 5
3.1. M
3.2. E
3.2.1. E
3.3. R
3.4. A
4. ELECTRICAL CONNECTION ............................................................................................................ 10
4.1. I
4.2. P
4.2.1. I
4.3. C
4.3.1. C
5. MECHANICAL APPLICATION .......................................................................................................... 15
5.1. TRD/TRH 600/605
5.2. T
5.3. P
ISPOSAL INSTRUCTIONS FOR ELECTRICAL AND ELECTRONIC EQUIPMENT
ECHANICAL DESIGN
LECTRICAL BLOCK DIAGRAM
XAMPLES OF APPLICATION
OTATION ANGLE MEASURING SYSTEM
NGLE-PULSE OUTPUT
NSTRUCTION FOR ELECTRICAL INSTALLATION
LUG CONNECTION
NSTALLING THE SIGNAL LEAD
ONNECTING CABLE
ABLE DIAGRAM, PLUG (SENSOR), OPEN ENDS, MODEL
ORQUE MEASURING SHAFT (MODEL
OSSIBLE INSTALLATION OF MODEL
......................................................................................................................... 5
(TRD/TRH/TRS 605
............................................................................................................... 7
(TRD/TRH/TRS/605/705) ................................................. 8
(TRD/TRH/TRS/605/705) ........................................................................... 9
(12
PIN
) ............................................................................................................. 12
......................................................................................................... 12
......................................................................................................................... 13
MODELS
............................................................................................................. 15
TRS600/605/705) ................................................................ 16
TRS600/605/705 ..................................................................... 16
MODEL
)........................................................... 6
................................................................................ 11
ZCC911 .................................................. 14
........................................ 3
6. MAINTENANCE .................................................................................................................................... 17
7. REPAIRS ................................................................................................................................................. 17
2 EM1005
Page 3

1. Important Information
1.1 Disposal Instructions for Electrical and Electronic
Equipment
Do not discard old electronic instruments in
trash. For disposal at end of life, please return
to an authorized local electronic waste
contact the nearest Futek Instrument s
i
nstructions.
disposal
ales
municipal
this
product
service or
office for return
3 EM1005
Page 4
2. Application and Key Features
Torque sensor with strain gages measuring
Wear-resistant transmission of the measuring
integrated
Measurement of
Torque
Integrated
(TRD/TRH/TRS 605 models only)
Application in the laboratory,
quality control
Ideal for use with power tools (
models only) and
model only
11 t o 26 V
Suitable for low
Fig. 1: Rotary Torque Sensor
amplifier
constant
measurement
system for rotation angle
)
and high speed
and variable
on the rotating
test stand
system
signal,
torques
shaft
measurement
manufacture
TRD/TRH 605
construction (TRS605
ranges
and
Torque
Rotation
Measuring
Strain
measuring
Angle
Gage
shaft
electronics
4 EM1005
Page 5
3. Description of the Measuring System
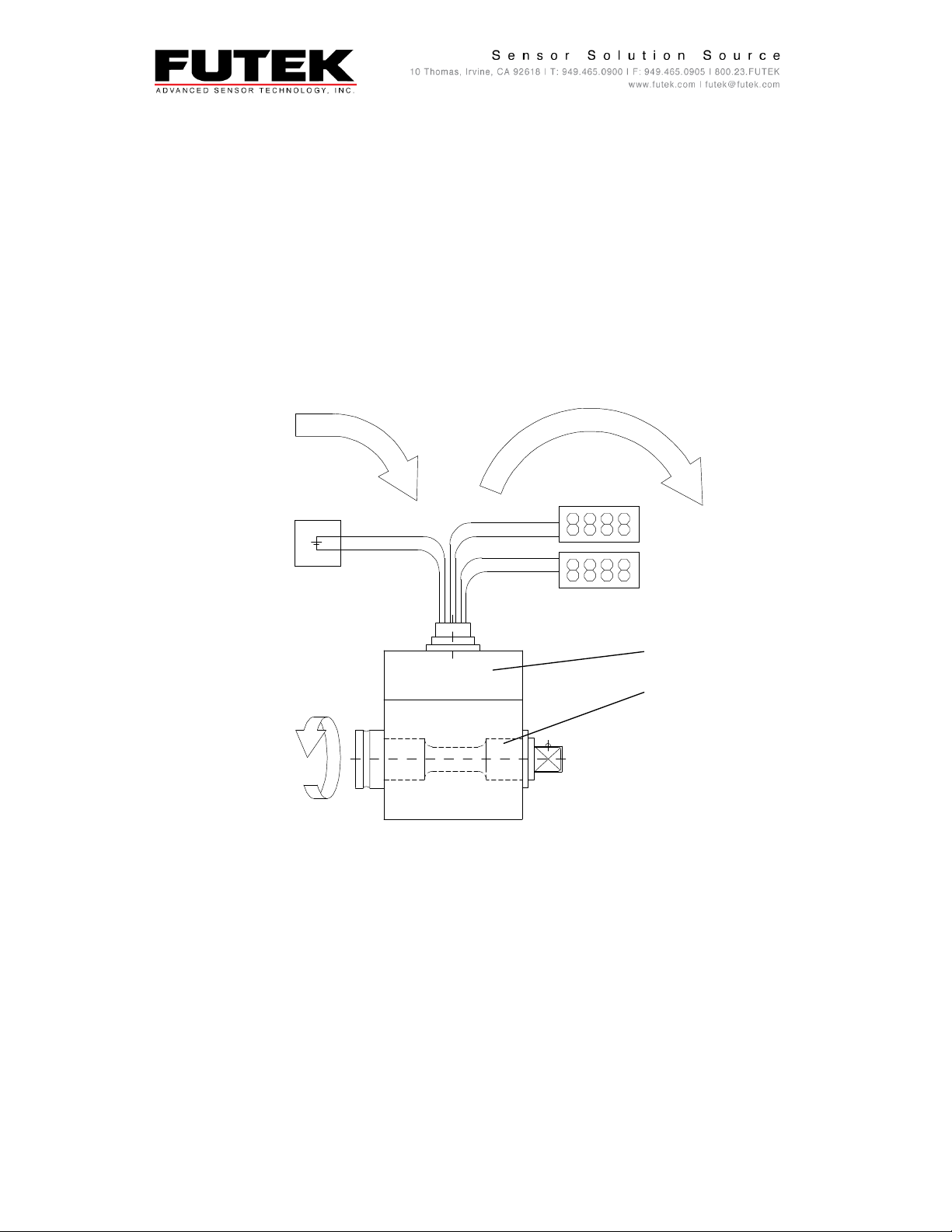
3.1. Mechanical Design
Torque Sensors consist of a base body
standard square
with
strain gauges and a signal
contains the
Sensor (TRD/TRH/TRS605 model )
Square Socket (TRD600/605) Square End (TRD600/605) or
or Hexagon Socket (TRH600/605) Hexagon End (TRH600/605)
or round shaft (TRS600/605) or round shaft (TRS600/605)
connections
stationary electronics for the signal
Shaft
Rotating Electronics
Bearing Strain Gages
or
Fig. 2: Mechanical Design Non-contact Torque
which
contains the measuring shaft. The shaft ends
stand
ard
hexagon
amplifier with
Cable/Connector
Rotation Angle Measuring System
ends.
On the measuring shaft there is a torsion distance
A/D transformer.
formation.
The connection box of the base body
Bearing
Sensor
are
performed
as
5 EM1005
Page 6
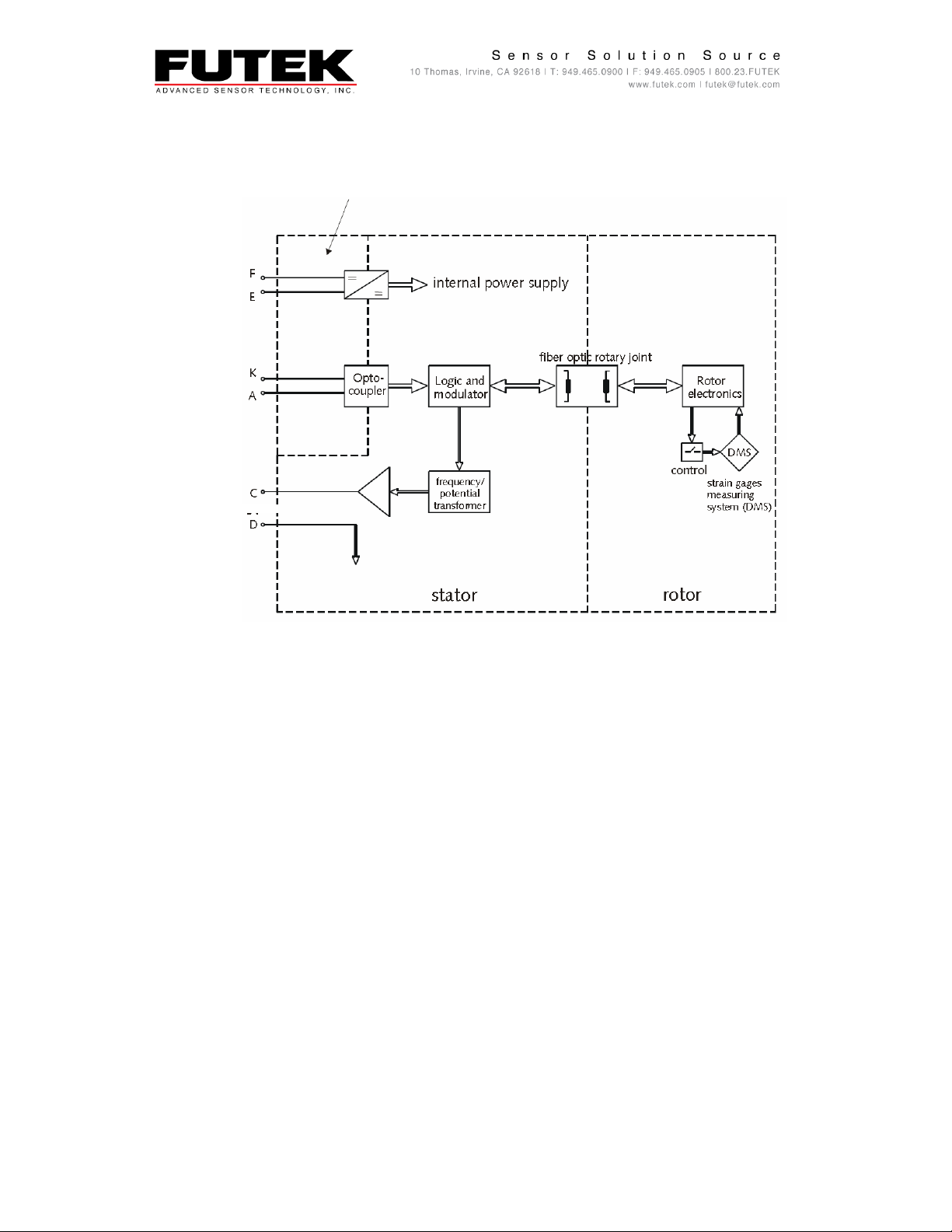
3.2. Electrical Block Diagram (TRD/TRH/TRS 605 model)
Feed and inspection input
measuring
Supply
11 to 26 VDC
1 Watt
Shunt
Calibration
Supply
4.5 to
30 VDC
Output
± 5 VDC
equipment is
Fig. 3: Electrical block diagram
of
electronic
electrically
isolated
6 EM1005
Page 7

Shield
Shield
Shunt Cal.
Power
Power
Torque
Power
DAQ/
Supply
Evaluation
Shunt Cal.
Torque
3.2.1. Examples of Application
Example of
electrical isolation for supply and s ignal
measurement.
Example of combining the power supply and signal measurement in the Evaluation Electronic.
Supply
Supply
Input
Signal
Output
Fig. 4: Separate Encoder and Torque Measuring Power Supply Diagram
Instrument
Input
Input
Signal
Output
Fig. 5: Power and measuring supply in the
Instruments containing Power Supply & Signal Device (IHH500 & IPM650)
evaluation
electronic
Device
Electronic
combined,
7 EM1005
Page 8

3
0 V
2
1
3
4
G B H E
+5 V
0 V
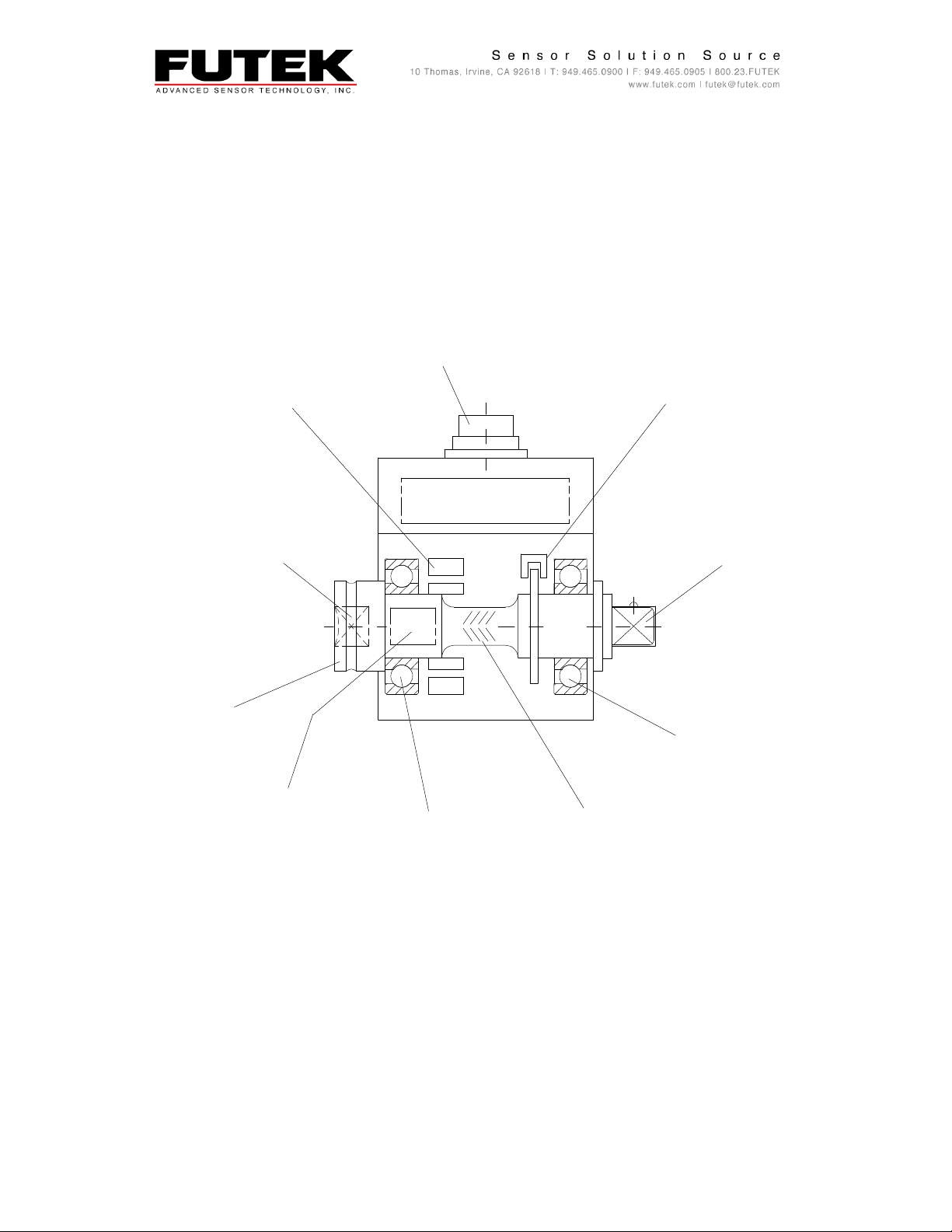
3.3. Rotation Angle Measuring System (TRD/TRH/TRS/605/705)
Fig. 6: Diagram showing the design of the
1. Rotating Torque
2. Pulse Disk
3. Forked Light Barrier with
4. Operation Amplifier
Shaft
LED
rotation
and Photo
angle measuring
Diode
system
Features:
360 light-dark stripes on the pulse disk
Two forked light
Pulse number
barriers shifted by phase angle
proportional
to the rotation
angle
90°
8 EM1005
Page 9

Rotation
Rotation
Rotation
3.4. Angle-Pulse Output (TRD/TRH/TRS/605/705)
Output
Output
A 1
Drive
(TRD605 models)
Pin B
Pin G
With drive on square socket or hexagon end direction
View A 1:
Side
of
rotation CW
Direction
of
A 2
Drive
Side
(TRH605 models)
A 3
Drive
Side
(TRS605/705 models)
Fig. 7:
View A 2:
View A 3:
Angle-pulse
output
Direction
Direction
of
of
9 EM1005
Page 10

4. Electrical Connection
Shielded Cable
Mating
Connector
Fig. 8: Electrical
Connections
Use Futek ZCC911 cable
To power supply unit and
Torque Sensor (all models)
disp
lay
10 EM1005
Page 11

min.
Ø
0.025 in²
Connector
Plug
Stator
Stator Support
Load
ing Torque Device
Sensor
Max. length 164 ft.
Sensor
4.1. Instruction for Electrical Installation
Housing
Ø0.980
Fig. 9: Electrical Instal
lation
Unit
11 EM1005
Page 12

4.2. Plug Connection (12 pin)
Function
Torque
Torque
Torque
Torque
Angle
Angle
Angle 1/ Speed
Angle 2 (90° shifted to Angle 2)
Shunt Calibration
Shunt Calibration
Shield
Not Connected
Not Connected
* Torque and Angle share the same pin for Ground.
, Power Supply
, Power Supply, Ground
, Signal Output
, Signal Output, Ground D
, Power Supply H
, Power Supply, Ground *E
, Inside the sensor to housing
, Signal Output B
, Signal Output
, Power Supply
, Power Supply, Ground
Pin
F
*E
C
G
K
A
M
J
L
Top View Built-In Plug
4.2.1. Installing the Signal Lead
Do not run the lead parallel to power cables or
Do not place the lead
transformers,
the lead inside
Make a loop in the lead
vibration.
used for the torque signal
torq ue outp ut
welders,
earthed steel
If supply and evaluation unit are galvanically
sign
contactors,
al.
close to
equipment producing
electric
conduit.
when affixing it at the
to
prevent the voltage drop on the power su p p l y ground affecting the
motors,
12 EM1005
control
etc.
torque
circuits.
strong
If such situations cannot be avoided, run
connected, a differential input must be
electromagnetic
sensor so that it is not
fields, such as,
damaged
by
Page 13

Cable Length
12 Pin Plug
12 Pin Binder
Flexible Cable
4.3. Connecting Cable
Cable Diagram with Plugs on Both Sides, Model ZCC914
Plug
Fig. 10: Cable diagram with plugs on both sides
Binder Pin Out
F
Torque
*E
C
D
H
*E
B
G
K
A
M
J
L
* Torque and Angle share the same pin for Ground.
Function
, Power Supply
Torque
, Power Supply, Ground
Torque
, Signal Output
Torque
, Signal Output, Ground
Angle
, Power Supply
Angle
, Power Supply, Ground
Angle 1/ Speed
Angle 2 (90° shifted to Angle 2)
Output
Shunt Calibration
Shunt Calibration
Shield
, Inside the sensor to housing
Not Connected
Not Connected
, Signal Output
, Power Supply
, Power Supply, Ground
, Signal
13 EM1005
Page 14

12 Pin Binder
Flexible Cable
Cable Length
Pigtail
Tinned End
4.3.1. Cable Diagram, Plug (Sensor), Open Ends, Model ZCC911
Binder Pin Out Function
F
*E
C
D
H
*E
B
G
K
A
M
J
L
Plug
Fig. 11: Cable Diagram, Plug (Sensor), Open
Torque
, Power Supply
Torque
, Power Supply, Ground
Torque
, Signal Output
Torque
, Signal Output, Ground
Angle
, Power Supply
Angle
, Power Supply, Ground
Angle 1/ Speed
Angle 2 (90° shifted to Angle 2)
Output
Shunt Calibration
Shunt Calibration
Shield
, Inside the sensor to housing
Not Connected
Not Connected
, Signal Output
, Signal
, Power Supply
, Power Supply, Ground
Ends
Wiring Code
Red
Black
Green
White
Orange
Black
Blue
Brown
Purple
Yellow
-
-
-
14 EM1005
Page 15

Motor/
Lead
Torque Sensor
Lead
Socket Spanner/bit
5. Mechanical Application
5.1. TRD/TRH 600/605 models
Torque sensor series TRD600/605 have square
3121.
Torque sensor series TRH600/605 have
The torque sensor is attached to a drive spi
Connector
TRD600/605 TRH600/605
Fig. 12: Application examples models TRD600/605 &
hexagon
ndle
Application examples:
connections
connections
as shown
Electric or
Pneumatic
Wrench
Connector
for plug-in tools according to DIN
according to DIN 3126, form E/F.
below
TRH600/605
15 EM1005
Page 16

Specimen with
Full Coupling
Full Coupling
Specimen
Drive brake with
Firm stator
5.2. Torque Measuring Shaft (Model TRS600/605/705)
The signal lead should not exceed a length
shunt cal.
circuits. The pin connection is explained in
On each side of the torque measuring shaft there is a high quality bearing installed, and it contains an
i
ntegrat
ed
housing base. The installation can have any
applied
measuring
to
balance geometrical false
shaft.
adjustments
Radial, Axial, Diagonal and Angular errors can be
Multi-disk Couplings
Diaphragm
Claw
Coupling
Coupling
s
of 100 ft. Do not run the lead parallel to power cables or
chapter 4.2 of this
position,
and like that
compen
however offset couplings must always be
keep
sated by the use of:
manual.
false loads
away from the torque
5.3. Possible Installation of Model TRS600/605/705
fixed bearing
Full coupling on both sides
Fixed bearing on both sides
Retaining Angle
fixed bearing
Fig. 13: Application example TRS705
Installation and operational Tips:
The Keys on the shaft are removable, may require to be removed before installing the couplings.
The sensor is only part of the complete drive shaft and depending on the speed the alignment
must be made in a proper way. Each type of coupling can compensate certain misalignment (of
radial, axial and angular character). Customer is responsible for damage to the shaft due to
misalignment and overloading on the shaft.
Radial and torsional vibrations can severely impact the performance of the torque sensor. For
this reason speeds at or near the torque sensor’s natural frequency should be avoided.
For coupling recommendation, see link on website under support/futek manuals/
TRD/TRH/TRS-Series.
16 EM1005
Page 17

Shaft stiff to turn
Bearing failure due to:
d) Bent shaft
Return to factory
Solution
Zero shift less than 2%
Torsional vibration
The zero reading may be
Zero shift between approx.
Zero shift more than 5%
Torque sensor has been
Torque sensor overloaded by
The zero reading may be
Torque sensor overloaded by
Hysteresis between
6. Maintenance
TRD/TRH/TRS Series sensors are almost
replaced by factory after its life time.
Durability of bearings in compensated temperature range is approx. 20,000 hours.
Durability of bearings in operating temperature range is approx. 10,000 hours.
For Precision applications: Calibration of the sensor should be done at FUTEK or with adequate
calibration equipment.
Calibration: Yearly calibration is recommended but it depends on the criticality of the application &
requirement and may require smaller calibration intervals.
Inspect torque sensor cable and mating connector for damage on a monthly basis.
maintenance-
free where the bearing needs to be
7. Repairs
2 and 5% of full scale
Fault
Possible Causes
a) Torsional or flexural
vibration
b) High axial or radial loads
c) Worn bearings
Torsional Shock
overloaded
Torsional vibration
Torsional shock
high alternating loads or
torsional vibration
re-adjusted at display
re-adjusted at the
display
Return to factory
clockwise and counterclockwise torque
Return to factory
high alternating loads or
torsional vibration
17 EM1005
 Loading...
Loading...