

Page 1
Page 2
9-52 Ashihara-cho,9-52 Ashihara-cho,
A
A
*00080797601**00080797601*
*00080797601**00080797601*
*OME72440C00**OME72440C00*
Nishinomiya, JapanNishinomiya, Japan
Telephone :Telephone : 0798-65-21110798-65-2111
Telefax :Telefax : 0798-65-42000798-65-4200
Your Local Agent/DealerYour Local Agent/Dealer
ll rights reserved.
ll rights reserved.
PUB.No.PUB.No. OME-72440OME-72440
(( TATATATA ))
CI-35/35HCI-35/35H
Printed in JapanPrinted in Japan
FIRST EDITION :FIRST EDITION : FEB.FEB. 19971997
C :C : MAY.MAY. 13,200213,2002
* 0 0 0 8 0 7 9 7 6 0 1 ** 0 0 0 8 0 7 9 7 6 0 1 *
*OME72440C00**OME72440C00*
* O M E 7 2 4 4 0 C 0 0 ** O M E 7 2 4 4 0 C 0 0 *
Page 3
SAFETY INSTRUCTIONS
"DANGER", "W ARNING" and "CAUTION" notices appear throughout this manual. It is the
responsibility of the operator of the equipment to read, understand and follow these notices. If you have any questions regarding these safety instructions, please contact a
FURUNO agent or dealer.
This notice indicates a potentially
hazardous situation which, if not
DANGER
WARNING
avoided, will result in death or
serious injury.
This notice indicates a potentially
hazardous situation which, if not
avoided, could result in death or
serious injury.
CAUTION
This notice indicates a potentially
hazardous situation which, if not
avoided, could result in minor or
moderate injury, or property damage.
iiiiiiiiiiiii
i
Page 4
WARNING
CAUTION
Do not open the cover of
the equipment.
This equipment uses high
voltage electricity which can
shock, burn, or cause death.
Only qualified personnel
should work inside the
equipment.
Do not disassemble or modify the
equipment.
Fire, electrical shock or serious injury can
result.
Immediately turn off the power at the
ship’s mains switchboard if water or
foreign object falls into the equipment
or the equipment is emitting smoke or
fire.
Continued use of the equipment can cause
fire, electrical shock or serious injury.
Do not place liquid-filled containers on
the top of the equipment.
Fire or electrical shock can result if a liquid
spills into the equipment.
Do not place heater near the equipment.
Heat can melt the power cord, which can
result in fire or electrical shock.
Do not operate the unit with wet hands.
Electrical shock can result.
Use the correct fuse.
Use of the wrong fuse can cause fire or
equipment damage.
A warning label is attached to the equipment. Do not remove the label. If the
label is missing or damaged, contact
a FURUNO agent or dealer about
replacement.
WARNING
To avoid electrical shock, do not
remove cover. No user-serviceable
parts inside.
Name: Warning Label (1)
Type: 86-003-1011-0
Code No.: 100-236-230
ii
Page 5

CONTENTS
SAFETY INSTRUCTIONS ________________________________ i to ii
TABLES FOR RECORDING USER PRESETS _______________ v to x
CHAPTER 1. GENERAL_______________________________1-1 to 1-8
1. FEATURES ..................................................................................... 1-1
2. PRINCIPLE OF MEASUREMENT .................................................. 1-2
3. TIDE, NA V-TIDE & TIDE DIFFERENTIAL....................................... 1-5
CHAPTER 2. OPERATION _____________________________2-1 to 2-4
1. CONTROL PANEL LAYOUT ........................................................... 2-1
2. FUNCTION OF KEYS AND CONTROLS........................................ 2-2
3. OPERATING PROCEDURE ........................................................... 2-4
CHAPTER 3. DISPLAY _______________________________3-1 to 3-18
1. DISPLAY SAMPLES ....................................................................... 3-1
2. HOW TO READ THE DISPLAY ...................................................... 3-2
FUNDAMENTAL DATA SECTION .....................................................3-3 to 3-8
SHIP’S SPEED/COURSE Display...................................................... 3-3
TRACKING MODE Display ................................................................ 3-4
ERROR Status Display....................................................................... 3-5
TIDE SPEED/DIRECTION Display..................................................... 3-6
PRESENT TIME Display .................................................................... 3-8
TRIP TIME/DISTANCE Display .......................................................... 3-8
DRIFT/TIDE DIF SECTION ..................................................................... 3-9
SET & DRIFT Display......................................................................... 3-9
TIDE DIFFERENTIAL Display ............................................................ 3-9
iii
Page 6

TIDE VECTOR/COURSE PLOT SECTION.....................................3-10 to 3-15
TIDE VECTOR Display...................................................................... 3-10
TIDE HISTORY Display......................................................................3-11
COURSE PLOT Display .................................................................... 3-12
TIDE EFFECT Display....................................................................... 3-13
DRIFT Display ................................................................................... 3-15
HEAD-UP/NORTH-UP Presentation ................................................. 3-15
RANGE CURSOR ............................................................................. 3-15
ECHO LEVEL SECTION........................................................................ 3-16
ECHO LEVEL Display ....................................................................... 3-16
MISCELLANEOUS DATA...............................................................3-17 to 3-18
WATER TEMPERATURE Display ..................................................... 3-17
MISCELLANEOUS DATA Display ..................................................... 3-18
CHAPTER 4. SETTING OPERATING CONDITIONS ________4-1 to 4-16
1. BASIC MENU.................................................................................. 4-1
MENU 1 .............................................................................................. 4-2
MENU 2 .............................................................................................. 4-4
MENU 3 .............................................................................................. 4-6
MENU 4 .............................................................................................. 4-8
2. RANGE SET MENU....................................................................... 4-10
3. ALARM SET MENU ....................................................................... 4-11
CHAPTER 5. TROUBLESHOOTING _____________________5-1 to 5-4
1. SELF-CHECK ................................................................................. 5-1
2. ERROR INDICATION...................................................................... 5-4
3. INTERNAL BATTERY ..................................................................... 5-5
SPECIFICATION ___________________________________AP-1 to AP-5
iv
Page 7
TABLES FOR RECORDING USER
ITEM
USER PRESET : selected
REF TIDE DIF
TIDE AVERAGE
TIDE HISTORY
LAYER1
LAYER2
LAYER3
TIDE DIF DSP
DRIFT DSP
TEMP DSP
ECHO LEV DSP
BACKGROUND
*
LAYER1
LAYER2
LAYER3
0 min
15 sec
1 min
1 min
2 min
5 min
3 min
10 min
4 min
30 min
5 min
1 hour
ON
ON
ON
ON
DRIFT
ON
COLOR
NORMAL
OFF
OFF
OFF
OFF
SPEED
OFF
GRAPH
1
OFF
2
3
FAC. SETTING
LAYER1
2 min (**)
15 sec
ON
ON
ON
ON
DRIFT
ON
COLOR
NORMAL
(**) “2 min” or longer averaging time is desirable to obtain stable and
smooth response of tide/tide differential display.
ITEM USER PRESET : selected
REF DEPTH
MENU SELECT
*
OFF
LOCK
E/S
UNLOCK
FAC. SETTING
OFF
LOCK
ITEM
USER PRESET : selected
SHIP SPD AVE
DRAFT
WT SPD DEPTH
HEEL ANGLE
TRIM ANGLE
GT SPD CALIB
WT SPD CALIB
BEARING CALIB
EXT KP1 DIST
EXT KP2 DIST
BTM TIDE TRK
*
15 sec
[ ] m
[ ] m
[ ] °
[ ] °
[ ] %
[ ] %
[ ] °
[ ] m
[ ] m
OFF
30 sec
60 sec
0.0 to 25.6 m
0.0 to 25.6 m
-12.8 to +12.7°
-12.8 to +12.7°
-12.8 to +12.7%
-12.8 to +12.7%
-12.8 to +12.7°
0.0 to 25.6 m
0.0 to 25.6 m
ON
FAC. SETTING
15 sec
0.0 m
2.0 m
0.0°
0.0°
0.0%
0.0%
0.0°
0.0 m
0.0 m
OFF
*
*
*
*
*
*
*
*
*
90 sec
PRESETS
The CI-30/35H provides menus to preset, various measuring and display conditions to customize
the equipment precisely for your operating conditions.
The form below is provided to record user presets, so they can be restored in the event of loss by
misoperation or by maintenance/service work.
1) BASIC MENU (Display/measuring conditions)
[MENU 1]
[MENU 2]
[MENU 3]
v
Page 8
ITEM
TIME DATA
*
WT SPEED
NAV FORMAT
*
*
NAV AID
NAV DATA
*
TIME INT
*
CRS CAL MODE
*
CRS CAL EXEC
*
TIDE OUT INT
*
INT
T/D
CIF
GPS
L/L
[ ] min
GT
START
15 sec
USER PRESET : selected
EXT
NAV-TIDE
NMEA
LORAN-C
SPD
1 to 10 min (in 1 min steps)
NAV
To start calibration, select START and press EVENT key.
30 sec
DECCA
MAN
1 min
2) RANGE MENU (Speed/distance/depth ranges)
DR
2 min
LORAN-A
5 min
ALL
10 min
FAC. SETTING
INT
T/D
CIF
ALL
SPD
1 min
MAN
- 15 sec
ITEM
SPEED RANGE
DIST RANGE
ECHO DEPTH
ECHO SHIFT
[ ] kt
[ ] NM
[ ] m
[ ]
3) RANGE MENU
ITEM
1ST LAYER
2ND LAYER
3RD LAYER
SHALLOW T/D
DEEP T/D
SHIP SPEED
TRIP
Marks on the ALARM MENU
Filled star ( ) : alarm active Hollow star ( ) : alarm inactive
Active speaker ( ) : speaker enabled Inactive speaker ( ) : speaker disabled
SPD
DIR
SPD
DIR
SPD
DIR
SPD
DIR
SPD
DIR
SPD
CRS
DIST
TIME
1.0 to 30.0 kt
0.1 to 5.0 NM
50 to 700 m
1 to 36
SET ON/OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
USER PRESET
MIN
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] NM
[ ]
MAX
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] kt
[ ]°
[ ] NM
[ ]
SP ON/OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
ON OFF
FAC. SETTING
2.0 kt
1.0 NM
50 m
1
FAC. SETTING
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
SET OFF / SP ON
Note: 1. Descriptions of menu items and the procedures for presetting them begin on page 4-1.
2. To clear user presets and automatically restore factory settings, select “FACTORY” on
the BASIC MENU2- “MENU SET”. (Note that the user presets for “TEMP DSP” and
“ECHO LEV DSP” in MENU1 are not cleared by this operation.)
3. Items marked with “
” are user changeable.
Items marked with “*” should not be changed needlessly once they are set at installation. Needless change can degrade the accuracy of measurements.
vi
Page 9
[READ THIS FIRST!!]
IMPORTANT NOTICE ON TIDE MEASUREMENTS
(In nav-aided mode, tide accuracy depends heavily on gyro accuracy.)
SETTING SHIP’S HEADING
The CI-35/35H has the nav-aided mode to measure absolute tides even in deep waters where ground
tracking is unattainable. To achieve reliable measurements, however, you must supply accurate
heading (gyro) information and ship’s position (or speed/course) data to the CI-35/35H.
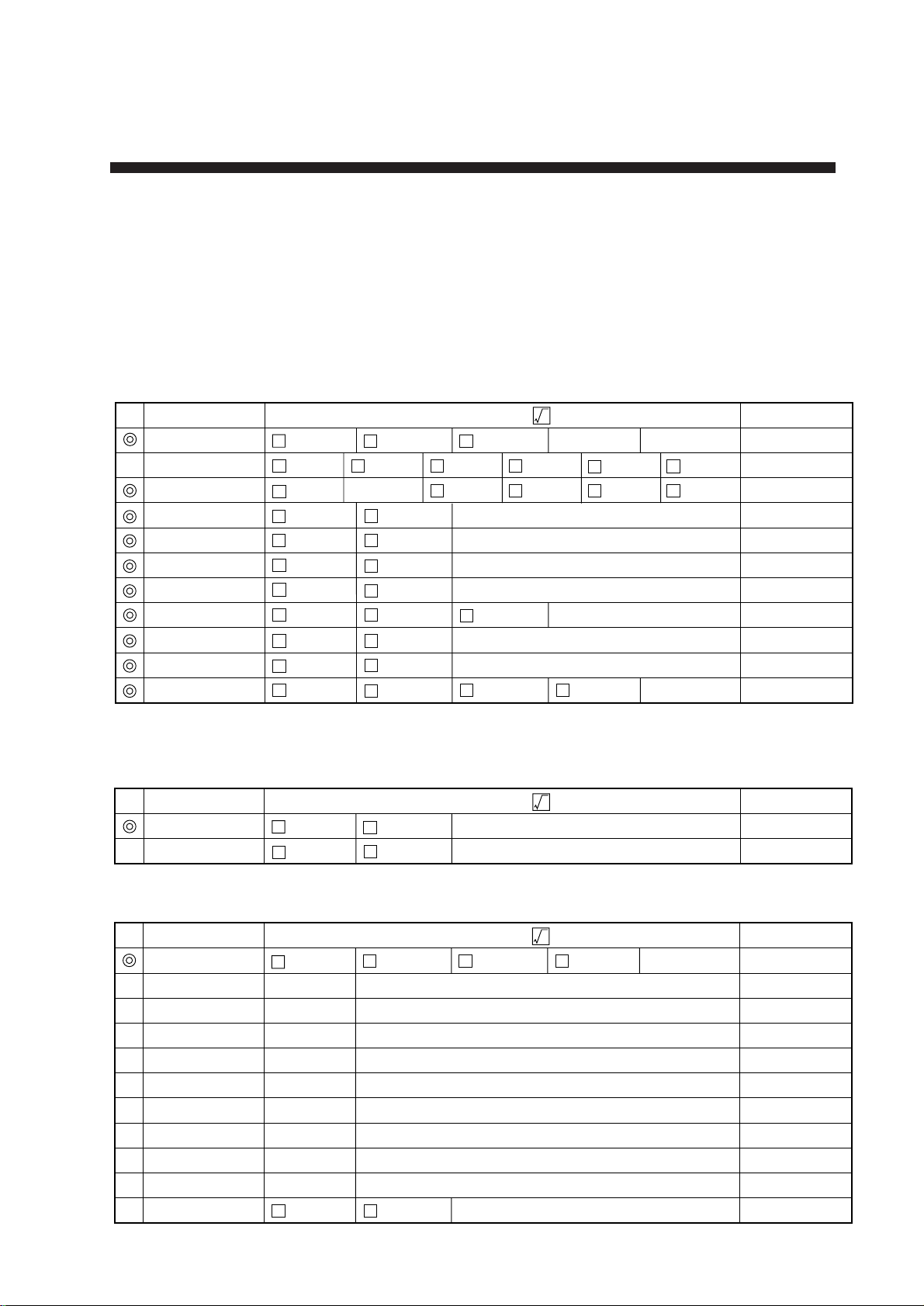
If you are going to use nav-aided mode, set the reading of the AD converter (gyro interface) exactly
with that of master gyrocompass.
Procedure
1. Confirm that the gyrocompass has settled and all the necessary compensations (latitude compensation, weather compensation, etc.) are made correctly.
2. Manipulate the AD converter to obtain the same reading as you read on the master gyrocompass. (Do not make adjustment while the ship is turning.)
Master
Gyrocompass
AD Converter
(Gyro Interface)
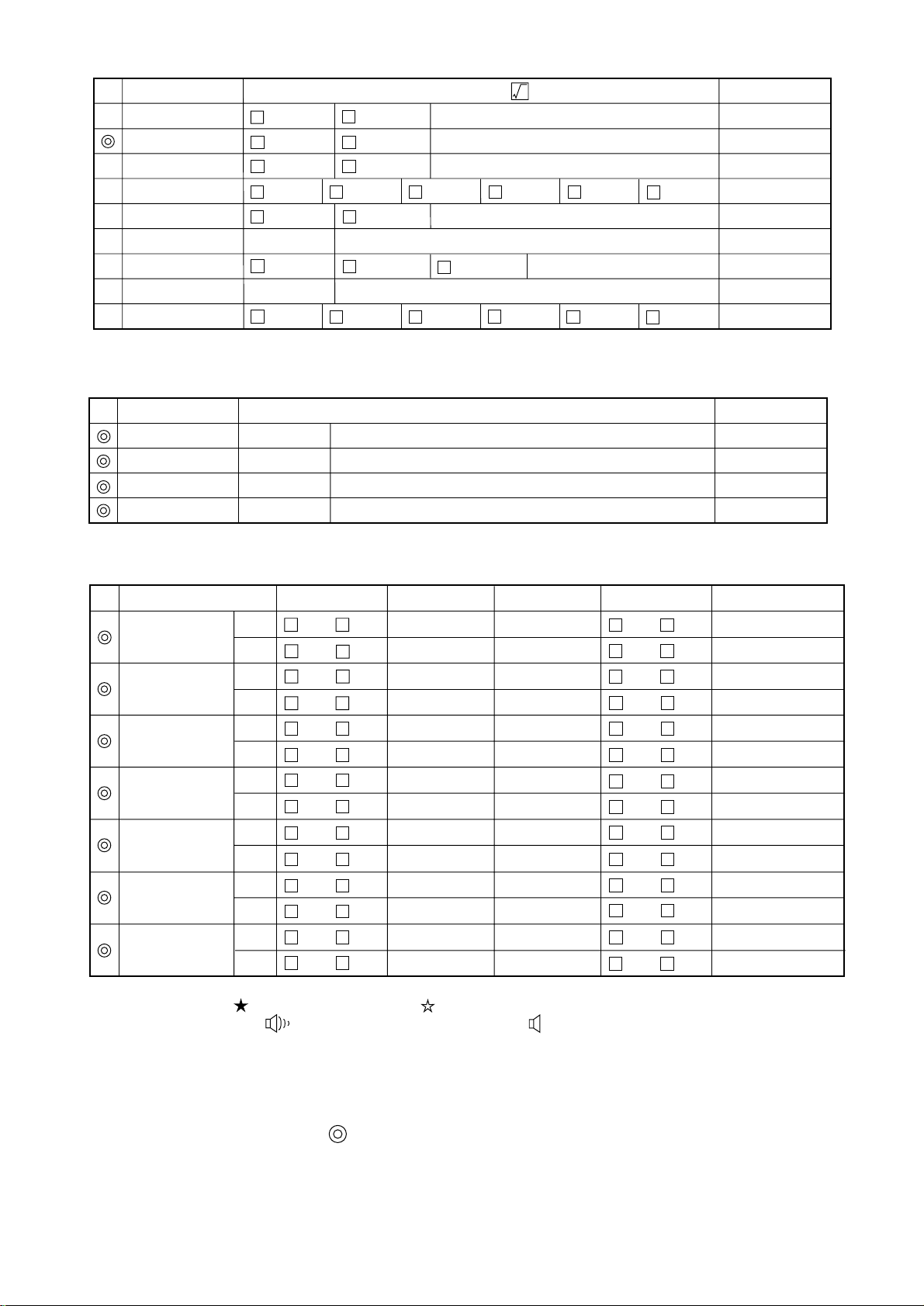
If the gyro reading is accurate enough, the CI-35/35H should provide accurate tide information. If
the gyro data contains some error, however, you may see the following symptoms.
¡ Set/drift information on nav-aided mode differs from that on ground-tracking mode.
¡ Tide/tide differential information on nav-aided mode differs from that on ground-tracking
mode.
20
10
GT Mode
0
1°
0.2
10
20
kt
20
0
10
-3°
0.5
NAV Mode
10
20
kt
GT Mode NAV Mode
If you encounter with such symptoms, perform the calibration following the procedure on the next
page.
vii
Page 10
CALIBRATING COURSE OFFSET (Automatic)
A. When ground-tracking is attainable:
1. Make sure the navaid (GPS) is working correctly and accurately.
2. On CI-35/35H, select ground tracking mode. (Press the TRACKING MODE key to see the
“GT” mode indication on the display.)
3. In Menu 4, set ‘CRS CAL MODE’ to “GT”.
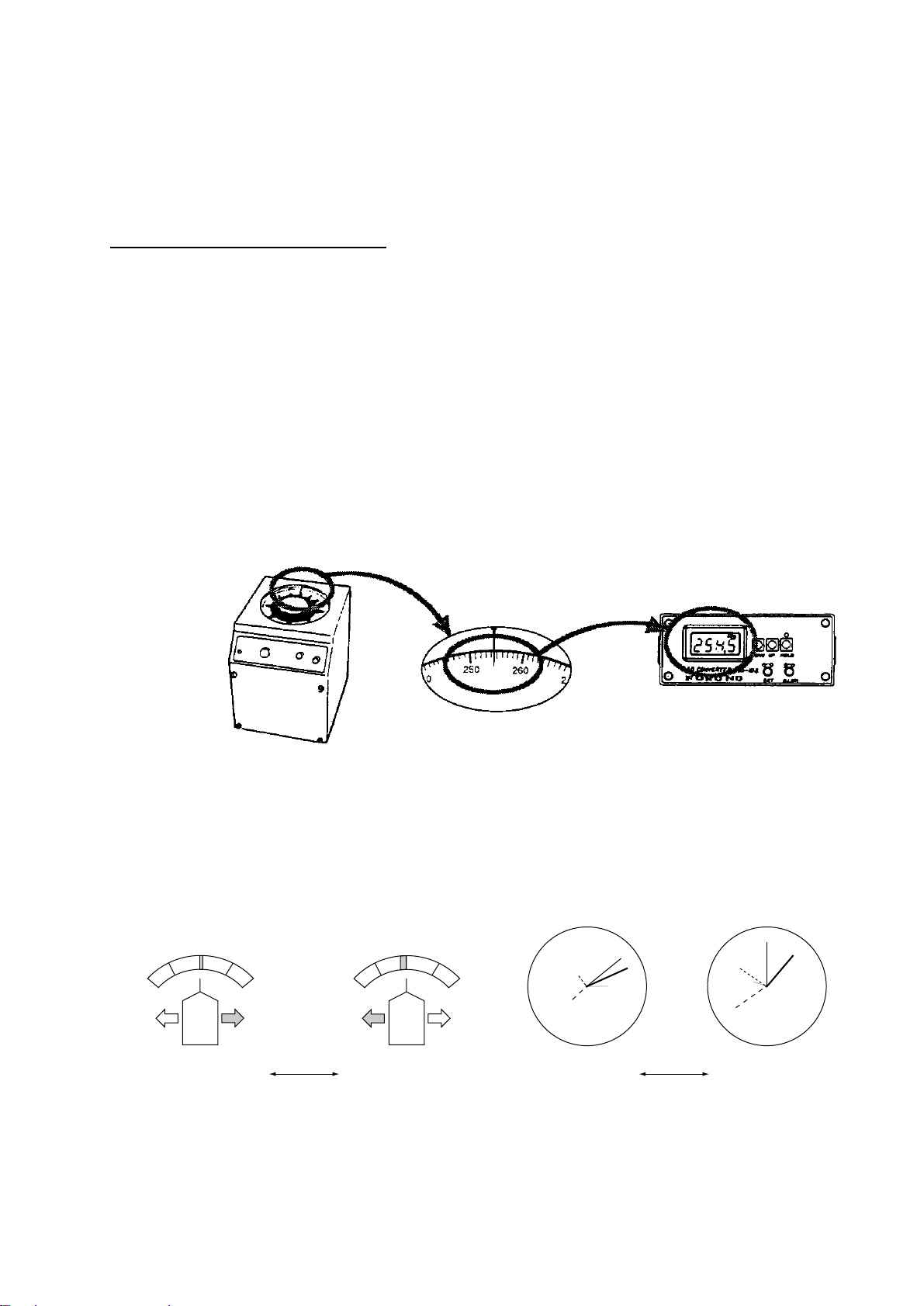
4. Run your boat at a speed about 10 kts, keeping the same direction. T o minimize the effect of
gyro speed error, it is desirable to run along parallels (i.e., eastward or westward).
5. In Menu 4, place the cursor on “START” (‘CRS CAL EXEC’) and then press the EVENT
key . As soon as you press the EVENT, “0.0” should appear in reverse text at the upper-right
part of the display. After 2 mile-run, the display will show the course calibration angle
(result of calculation) in normal text.
Course made good
by CI-35/35H plus Gyro
Start Point
EVENT
pressed
2 n.m. (approx)
Lead run
Course made good
by ext. navaid (GPS)
Course calib. angle
calibrated to fit these
two courses made good
B. When ground-tracking is unattainable:
1. Make sure the navaid (GPS) is working correctly and accurately.
2. On CI-35/35H, select nav-aided mode. (Press the TRACKING MODE key to see the “NA V”
mode indication on the display.)
3. In Menu 4, set ‘CRS CAL MODE’ to “NAV”.
4. Run your boat at a speed about 10 kts, keeping the same direction. T o minimize the effect of
gyro speed error, it is desirable to run along parallels (i.e., eastward or westward).
5. In Menu 4, place the cursor on “START” (‘CRS CAL EXEC’) and then press the EVENT
key . As soon as you press the EVENT, “0.0” should appear in reverse text at the upper-right
part of the display.
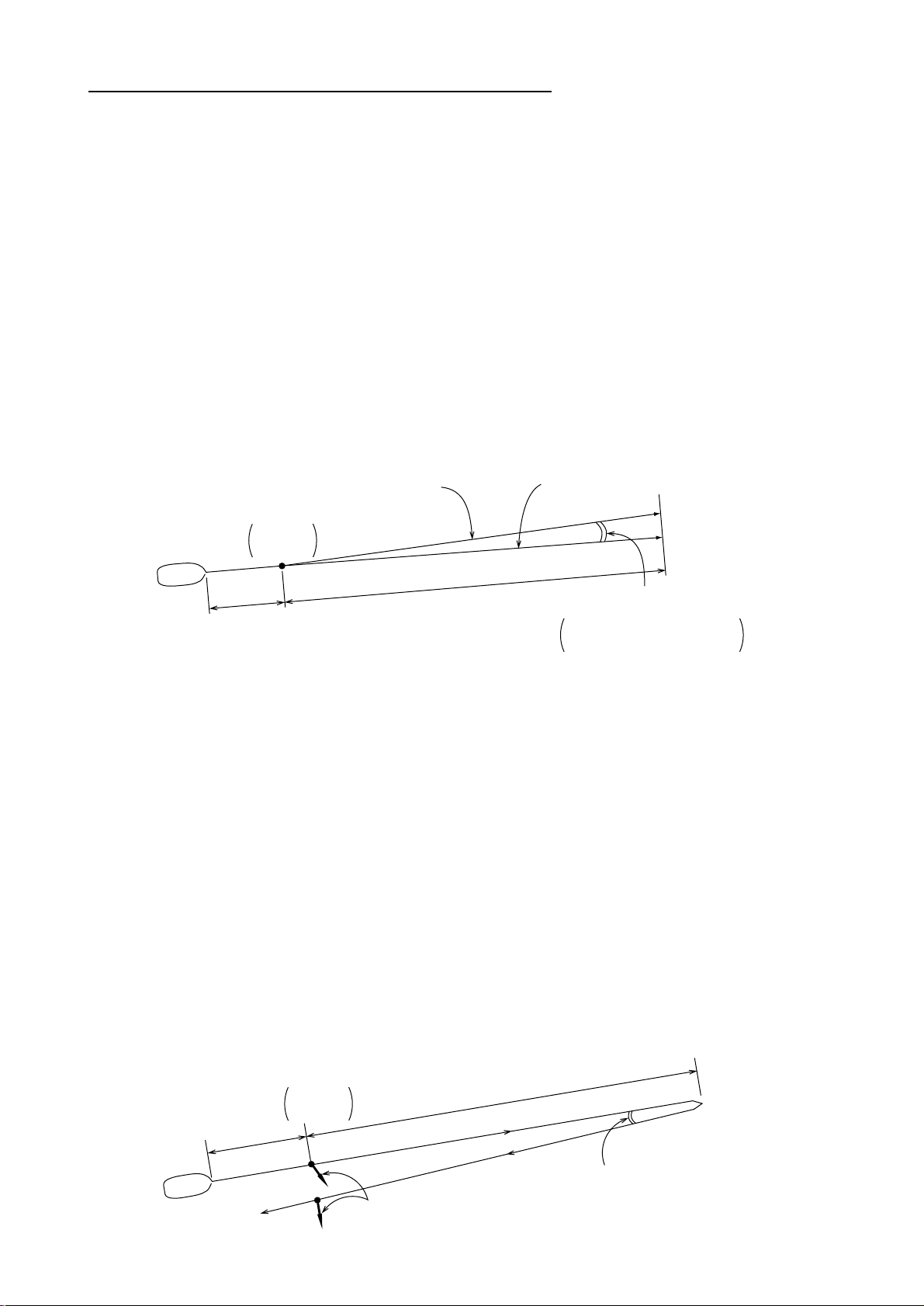
6. When the boat has run for 5 minutes, turn your heading almost 180˚ and steer back to the
start point. After 10 minute-run, the display will show the course calibration angle (result of
calculation) in normal text.
Start Point
EVENT
pressed
Lead run
calibrated to equalize
these tides
5 minutes
(half way)
off the track by 5 to
10° not to get on
own wake
viii
Page 11
WHY IS GYRO DATA IMPORTANT IN NAV-AIDED MODE?
If you consider the difference of tide vector calculations is ground-tracking mode and in nav-aided
mode, you will realize how important the gyro (heading) information is.
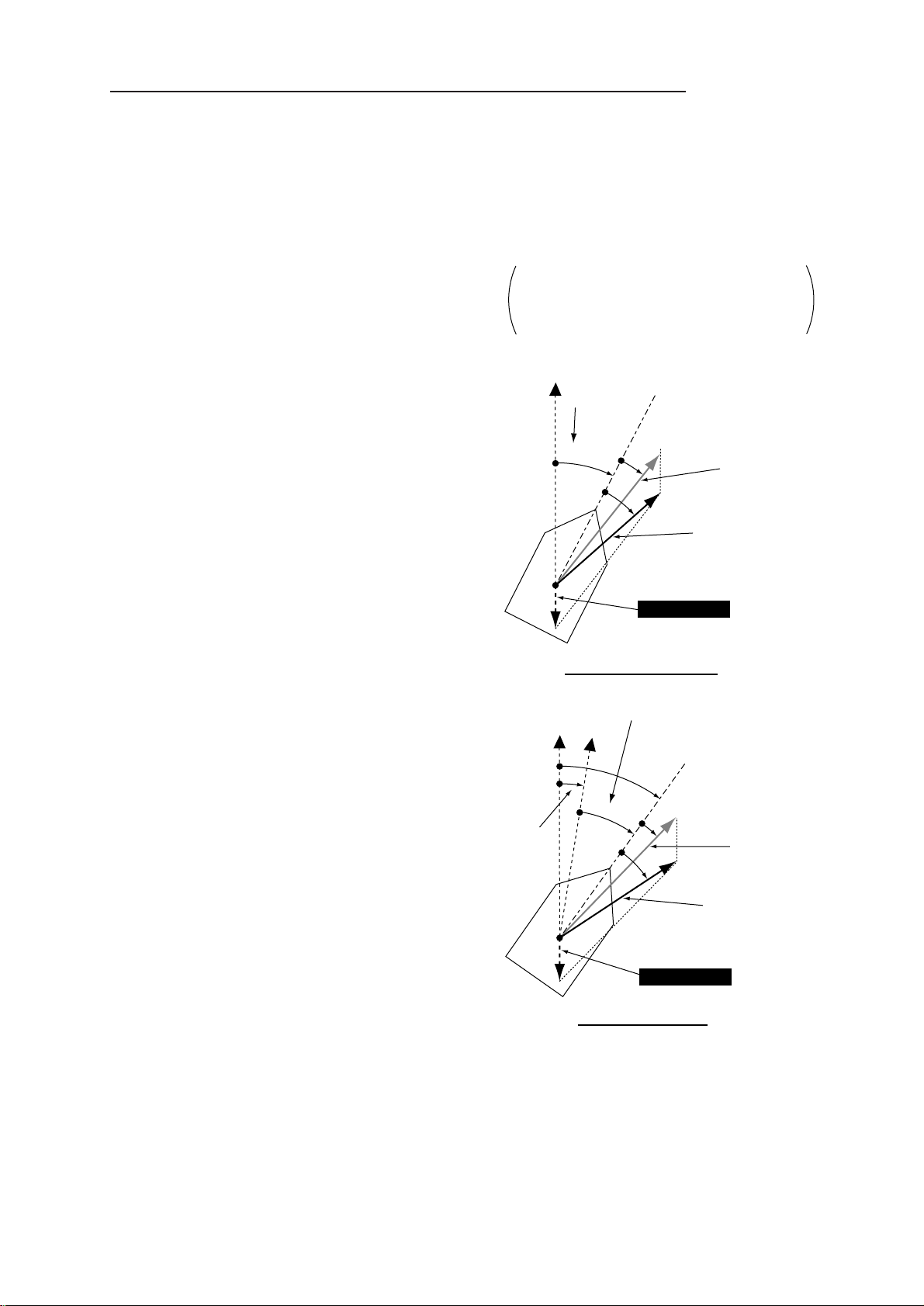
Tide Calculation in Ground-Tracking Mode
In ground-tracking mode, the CI-35/35H derives
tide information from the following data.
(1) Ship’s speed/course based on ground
(ground speed)
(2) Ship’s speed/course based on target layer
(water speed)
(3) Bearing of ship’s bow
(Heading by gyro)
Both ground speed (1) and water speed (2) are
sensed by the common transducers mounted on the
hull. Thus, they are the speed vectors with respect
to the ship’s bow. No matter what the true bearing
of ship’ s heading be, the relative angle of these two
vectors does not change. The tide vector is simply
given as the difference of these two speed vectors.
: True bearing of ship’s bow (ref. north)
A
θ
H
θ
: Gyro reading
G
θ
: Direction of ground speed (ref. bow)
W
θ
: Direction of water speed (ref. bow)
True north
Ship’s bow
eGyro
reading
H
=
A
θ
θ
W
θ
wWater speed
vector
G
θ
qGround speed
vector
Tide Vector
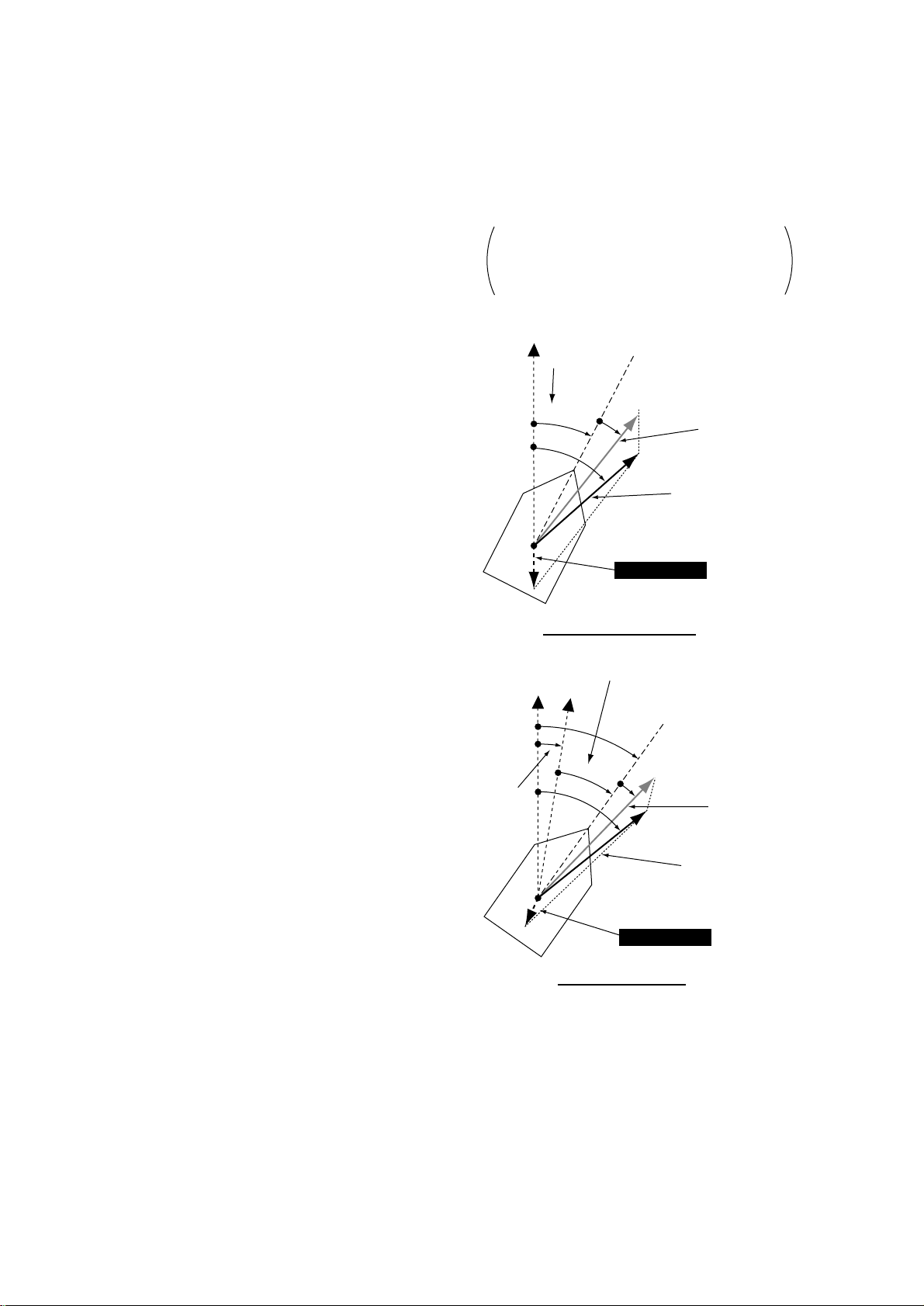
The heading data by gyro (3) is used after the tide
vector calculation just to express the vector directions in true bearings (north referenced).
Even if the gyro data contains error, the sizes and
relative angles of vectors do not change. The gyro
error only affects the bearing indication of each vector .
Without gyro error
True north
Gyro
error
eGyro
reading
A
θ
H
θ
Ship’s bow
W
θ
G
θ
qGround speed
vector
Tide Vector
wWater speed
vector
With gyro error
True bearing of each speed vector contains
fixed error. But, their sizes and relative angles
are maintained despite the gyro error.
ix
Page 12
Tide Calculation in Nav-Aided Mode
In nav-aided mode, the CI-35/35H derives tide information from the following data.
(1) Ship’s speed/course sensed by the external navigator (GPS)
(nav speed = pseudo ground speed)
(2) Ship’s speed/course based on target layer
(water speed)
(3) Bearing of ship’s bow
(Heading by gyro)
Here, nav speed (1) is the ship’ s speed vector sensed
by the external navigator, and the moving direction is expressed with respect to true north.
While the water speed (2) is the ship’s speed vector measured by CI-35/35H using the Doppler shifts
against the measuring layer, and accordingly its direction is expressed with respect to the ship’s bow.
As the directional reference of these two vectors
are different (north vs ship’ s bow), we can not simply calculate the difference of vectors to obtain the
tide vector in question.
So the direction of water speed vector (2) is converted to true bearing (north reference) by using
the gyro data, and then the tide vector is calculated.
If the gyro data contains some error, the true bearing of the water speed vector changes (rotates) accordingly . While the bearing of the nav speed vector
does not change with the gyro error. (The relative
angle of these two changes.)
In other words the tide vector, given as a difference of these two speed vectors, changes in size
(speed) and bearing by the gyro error . (Error in size
and bearing mean the tide vector is unreliable and
useless.)
A
θ
: True bearing of ship’s bow (ref. north)
H
θ
: Gyro reading
N
θ
: True bearing of nav speed (ref. north)
W
θ
: Direction of water speed (ref. bow)
True north
eGyro
reading
HθA
θ
θ
=
N
Ship’s bow
W
θ
Tide Vector
wWater speed
vector
qNav speed
vector
Without gyro error
True north
Gyro
error
eGyro
reading
A
θ
H
θ
N
θ
Ship’s bow
W
θ
wWater speed
vector
qNav speed
vector
You may now realize that the gyro data in nav-aided
mode is very important and it has to be accurate
enough for reliable tide data.
Relative angle of water speed vector and
To obtain dependable tide/tide differential data, it
is desirable to reduce the gyro error below 1 degree.
nav speed vector changes with gyro error.
Accordingly, the size (speed) and direction
of tide vector change.
Note: The depth must be at least 40 m in order to calculate tide.
x
Tide Vector
With gyro error
Page 13

CHAPTER 1. GENERAL
1. FEATURES
¡ The functions of CI-35 and CI-35H are same. CI-35H is type approved by MOT (Ministory of
Transportation).
¡ Even in deep waters where ground (bottom) reference is not available acoustically, the CI-35/
35H can provide absolute movements of measuring layers by receiving position (or speed) data
from GPS navigator and heading data from gyro compass. It may be used on deep sea fishing
boats or on ocean research vessels.
¡ The CI-35/35H consists of three major units; display unit; transceiver unit and hull unit (trans-
ducer), each compact enough to permit installation even on a small boat.
¡ Triple-beam system for automatic error compensation against pitching and rolling of vessel.
Single-mold transducer makes installation easy while maintaining mechanical beaming accuracy.
¡ Sounding frequency of 130 kHz provides high interference immunity from other acoustic equip-
ments. Intelligent digital signal processing technique adds tracking stability and measuring accuracy.
¡ Echo level display always on screen. Permits constant monitoring of signal conditions of three
sounding beams.
¡ Tide effect display plots movements of tides beneath the vessel’s course track. Helpful in esti-
mating three-dimensional deformation of cast net.
¡ Tide history display presents change of tide over last 24 sample points (24 hours maximum)
¡ Raw data output port provided for collecting and analyzing current data on a separate computer .
Note: When transmitting with the external transmission pulse (KP) taken from an external device
(echosounder, sonar , etc.), the repetition rate of the KP should be more than 500 ms. The repetition
rate may become shorter than 500 ms when the range setting on the external device is less than 100
m. Therefore, set the range on the external device to more than 100 m.
1-1
Page 14
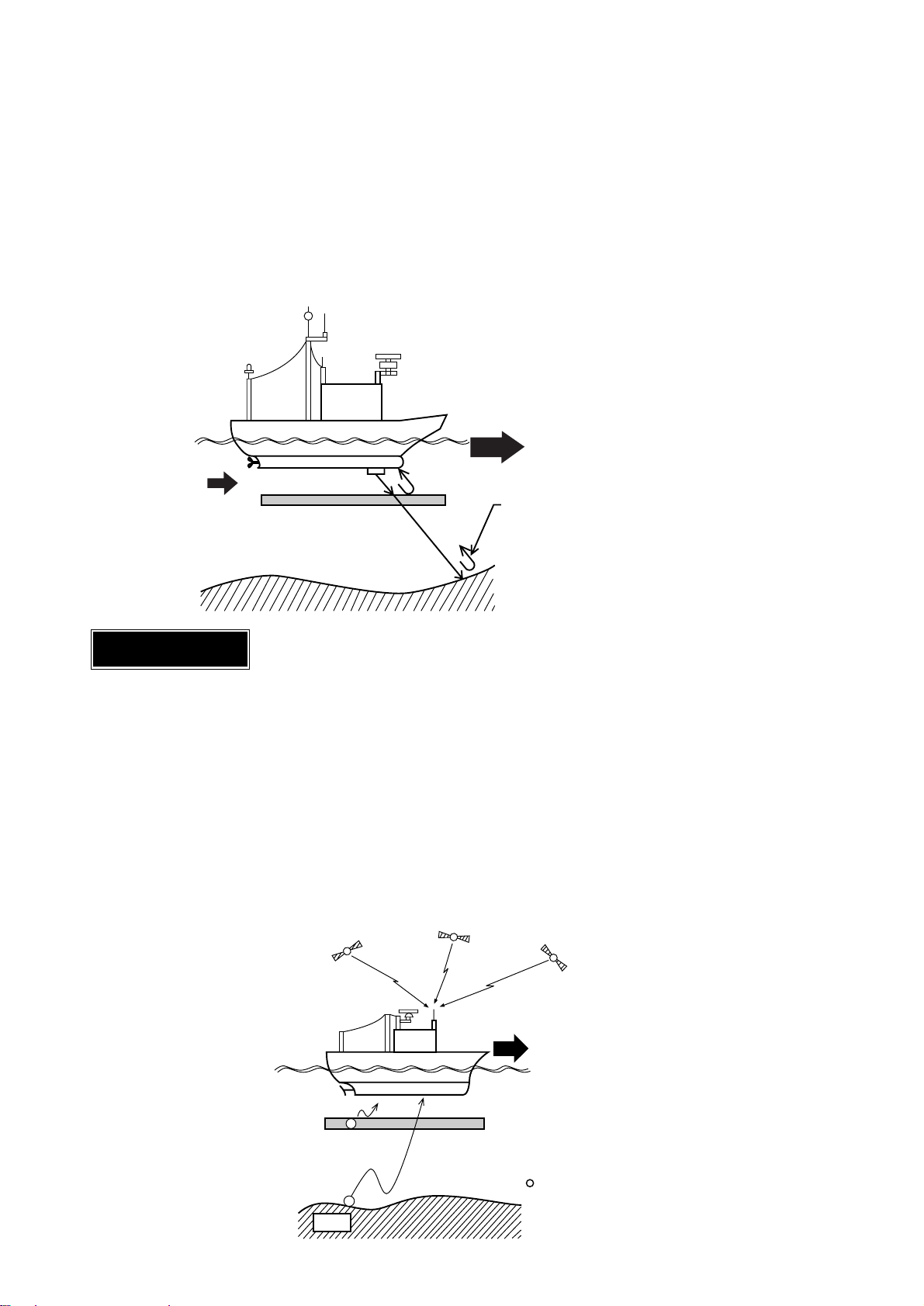
2. PRINCIPLE OF MEASUREMENT
When a moving vessel emits an acoustical pulse into the water at an angle, a portion of emitted
energy is reflected from the seabed and other microscopic objects in the sound path, such as plankton or air bubbles. The frequency of the received signal is shifted from the transmitted frequency in
proportion to relative velocity between the vessel and underwater reflecting objects. This is called
Doppler Effect.
The CI-35/35H calculates and displays movements of ship and currents at specific depths by measuring Doppler shifts obtained from three separate directions.
Planktonic layer
Seabed
Ship’s Speed
(Here, speed is a vector value including velocity and direction.)
Frequency of reflected signal is
shifted in proportion to relative speed
between the vessel and reflecting
objects.
Depending on the base of measurement, ship’s speed is expressed in two ways:
Ground tracking speed: Ship’s speed and course relative to seabed (fixed base)
(Absolute speed)
Water tracking speed: Ship’s speed and course relative to water layer just below the
(Relative speed)
vessel (floating base)
Nav-aided speed: Ship’s speed and course obtained by external navigation
(Absolute speed)
equipment (GPS)
1-2
GPS satellites
Water tracking speed
Ground tracking speed
Fixed
Nav-aided speed
(Pseudo ground tracking speed)
Near-surface layer
:Base of measurement
Page 15
Tide
Tide is movement of watermass at a particular depth.
To know absolute tide (speed on ground), the following two data are required:
1 Ship’s speed and course based on ground
2 Ship’s speed and course based on measuring layer (A)
Absolute tide is, then, given as a difference of these two speed vectors.
Absolute Tide = 1 - 2
w
Layer (A)
q
Fixed
:Base of
measurement
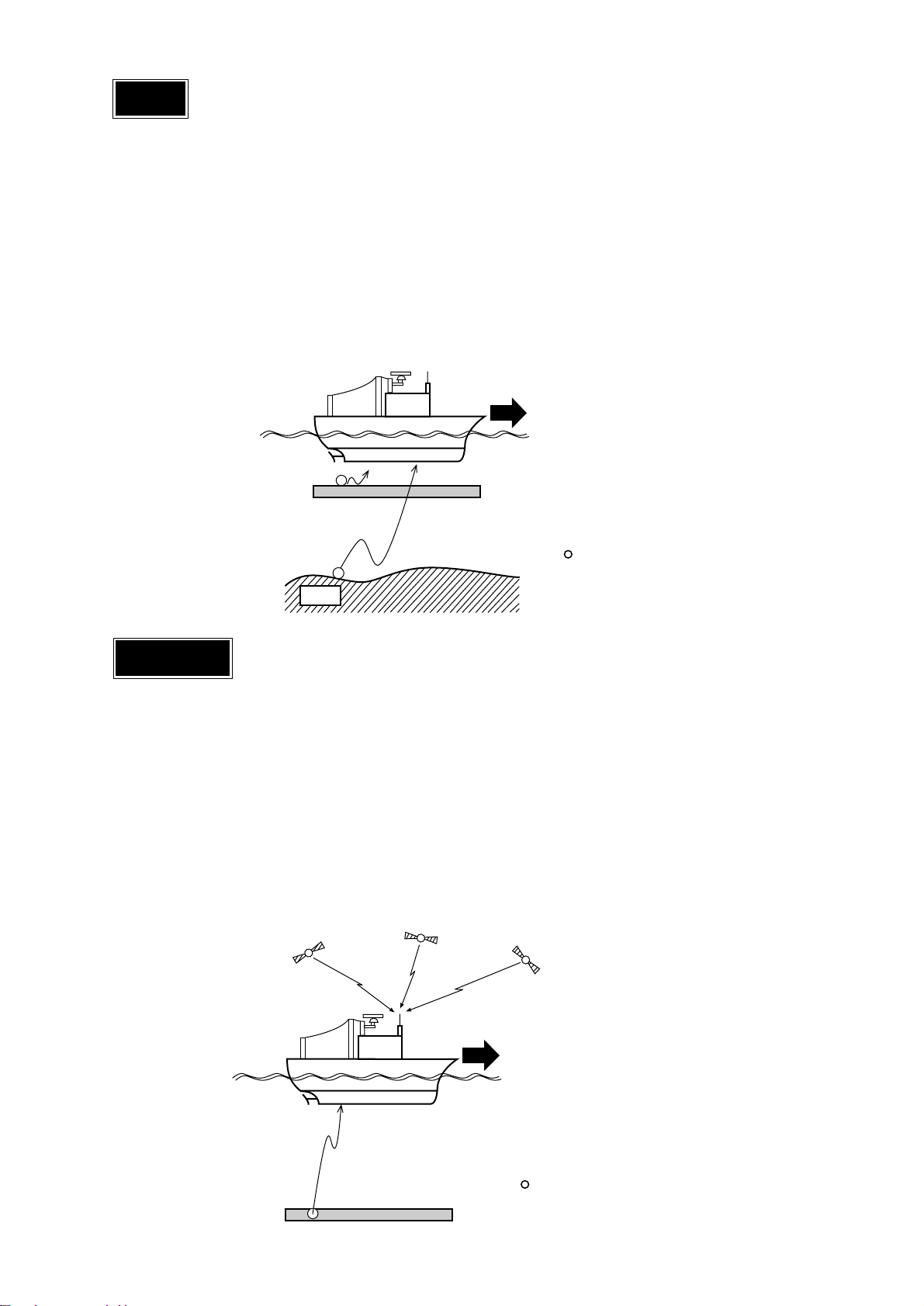
Nav-Tide
Nav-Tide is an absolute movement of watermass at a particular depth, taking speed information
from the external navigator (GPS) as a pseudo ground tracking speed.
To calculate Nav-tide, the following two data are required:
1 Ship’s speed and course obtained by external navigation equipment (GPS)
2 Ship’s speed and course based on measuring layer (A)
Nav-tide is, then, given as a difference of these two speed vectors.
Absolute Tide = 1 - 2
GPS satellites
q Nav-aided speed
(Pseudo ground tracking speed)
w Water tracking
speed
:Base of measurement
Layer (A)
1-3
Page 16
Tide Differential
Tide differential is a relative movement of tides at different depths, layer (A) and layer (B).
To calculate tide differential, the following two data are used:
1 Ship’s speed and course based on layer (A)
2 Ship’s speed and course based on layer (B)
Tide differential between two layers is, then, given as a difference of these two speed vectors.
Tide Difference = 1 - 2 (Movement of layer B based on layer A)
or
= 2 - 1 (Movement of layer A based on layer B)
q
Layer (A)
w
Layer (B)
:Base of measurement
1-4
Page 17
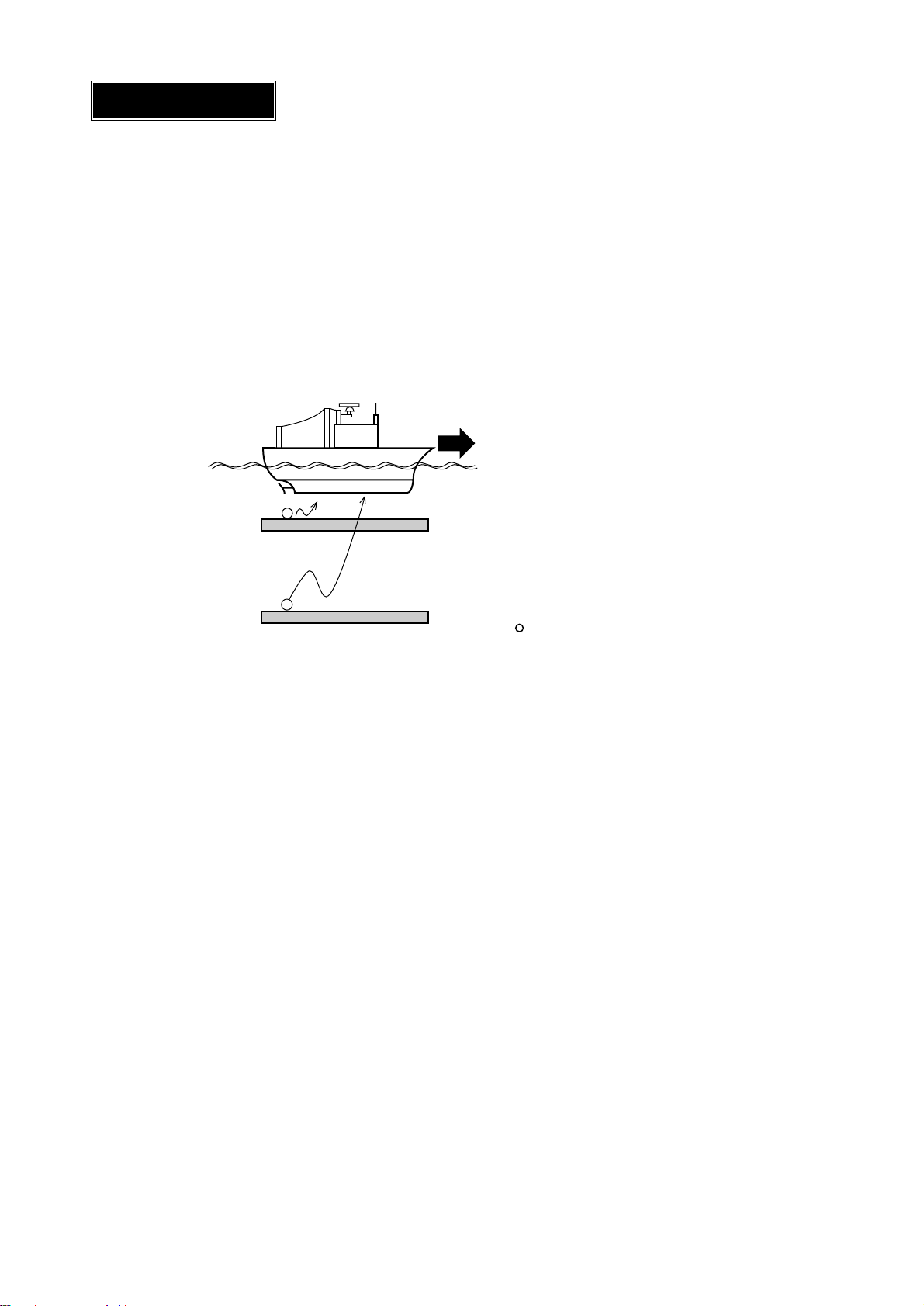
3. TIDE, NAV -TIDE & TIDE DIFFERENTIAL
Tide
(Absolute tide)
Absolute tide can be measured in the ground tracking mode.
10 NM (1 hour trip)
Start of
trip
Layer A
(Moving at 10 kt on ground)
q
(Moving at 3 kt on ground)
w
Fixed
End of
trip
:Base of
measurement
Assume that the ship and layer A are moving in the same direction, and ship’s speeds based on
ground (Vg) and on layer A (Vwa) are measured as;
Vg = 10 kt (Ship’s speed based on ground)
Vwa = 7 kt (Ship’s speed based on layer A).
Speed of layer A based on ground (C1) can be calculated as follows:
C1 = Vg - Vwa
= 10 - 7
= 3 (kt)
Nav-Tide
(Absolute tide)
Absolute tide can be measured in the nav-aided mode.
Nav-aided ship’s speed (Vn) is equivalent to ship’s ground tracking speed in the ideal conditions.
That is, the nav-tide can be calculated by simply replacing Vg with Vn in the above equation.
1-5
Page 18
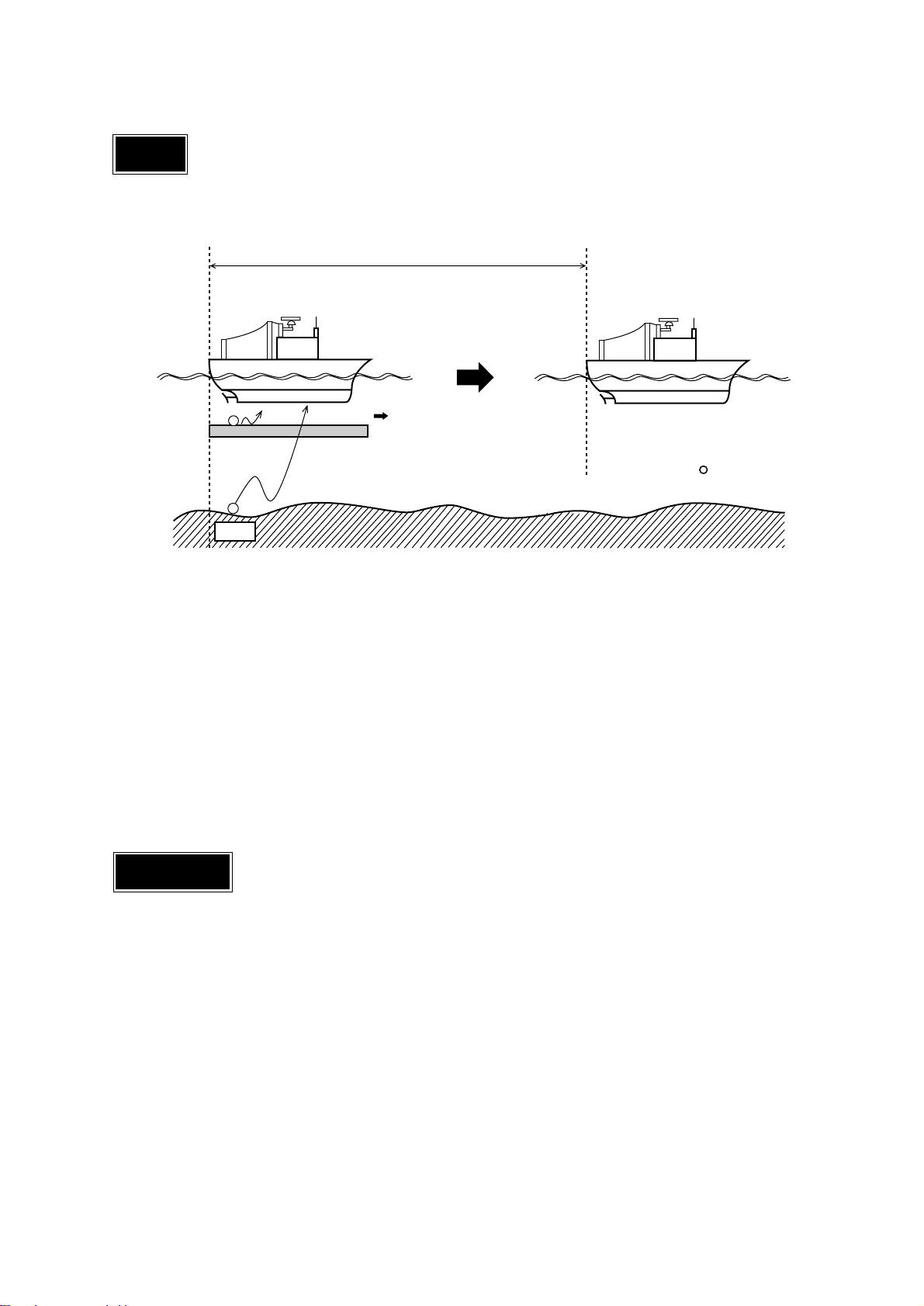
Tide Differential
Tide differential is a relative movement of tides at different depths.
It can be measured in the ground tracking, water tracking and nav-aided modes.
10 NM (1 hour trip)
Start of
trip
Layer A
Layer B
w
(Moving)
(Moving)
2 kt
e
:Base of measurement
5 kt
End of
trip
Assuming that the ship, layer A and layer B are moving in the same direction, and ship’s speeds
based on layer A (Vwa) and on layer B (Vwb) are measured as;
Vwa = 8 kt (Ship’s speed based on layer A)
Vwb= 5 kt (Ship’s speed based on layer B)
Tide differential calculations in ground tracking mode
As an absolute ship’s speed (Vg) is available in the ground tracking mode, tide speeds of layer A
(C1) and layer B (C2) based on ground are calculated as follows:
C1 = Vg - Vwa (Speed of layer A based on ground)
C2 = Vg - Vwb (Speed of layer B based on ground)
Thus, the tide differential (Cd) between layer A and layer B is;
Cd = C2 - C1
= (Vg - Vwb) - (Vg - Vwa)
= Vwa - Vwb
= 8 - 5
= 3 (kt)
or
Tide differential based on layer A
Speed of layer B viewed from
layer A
1-6
Page 19
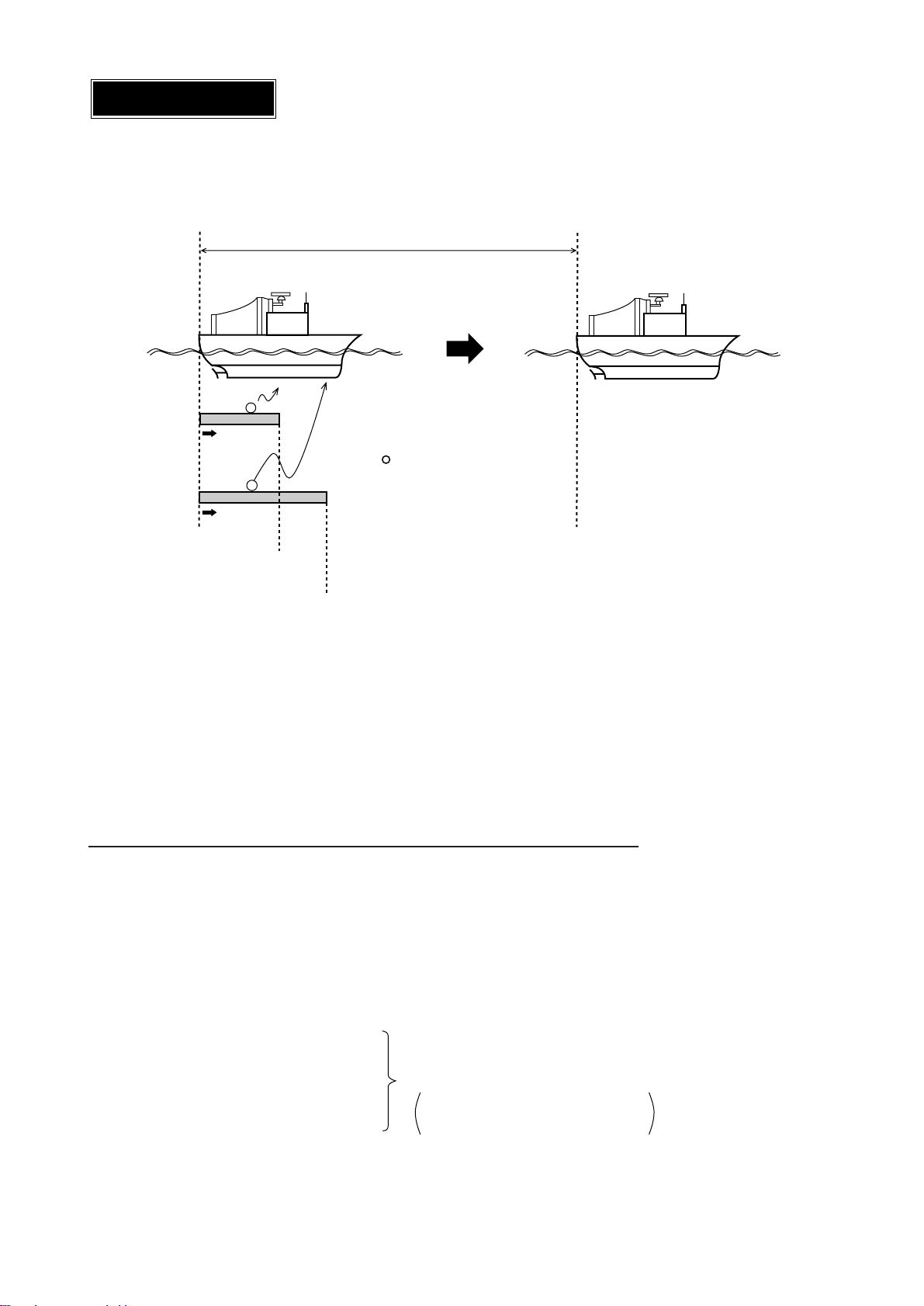
Cd = C1 - C2
= (Vg - Vwa) - (Vg - Vwb)
= Vwb - Vwa
= 5 - 8
= -3 (kt)
Tide differential based on layer B
Speed of layer A viewed from
layer B
In the water tracking mode, watermass just below the transducer (near-surface layer) is taken as the
base of all measurements (virtual ground). Therefore, the ship and tide speeds in the water tracking
mode are not absolute but relative to this near-surface layer.
Vw = 9 kt (Ship’s speed based on near-surface layer)
Vwa = 8 kt (Ship’s speed based on layer A)
Vwb= 5 kt (Ship’s speed based on layer B)
Start of
trip
Nearsurface
layer
Layer A
Layer B
1 kt
q
2 kt
10 NM (1 hour trip)
w
e
5 kt
End of
trip
:Base of measurement
Assume that the ship and all measuring layers
are moving in the same direciton, but at different
speeds.
1-7
Page 20
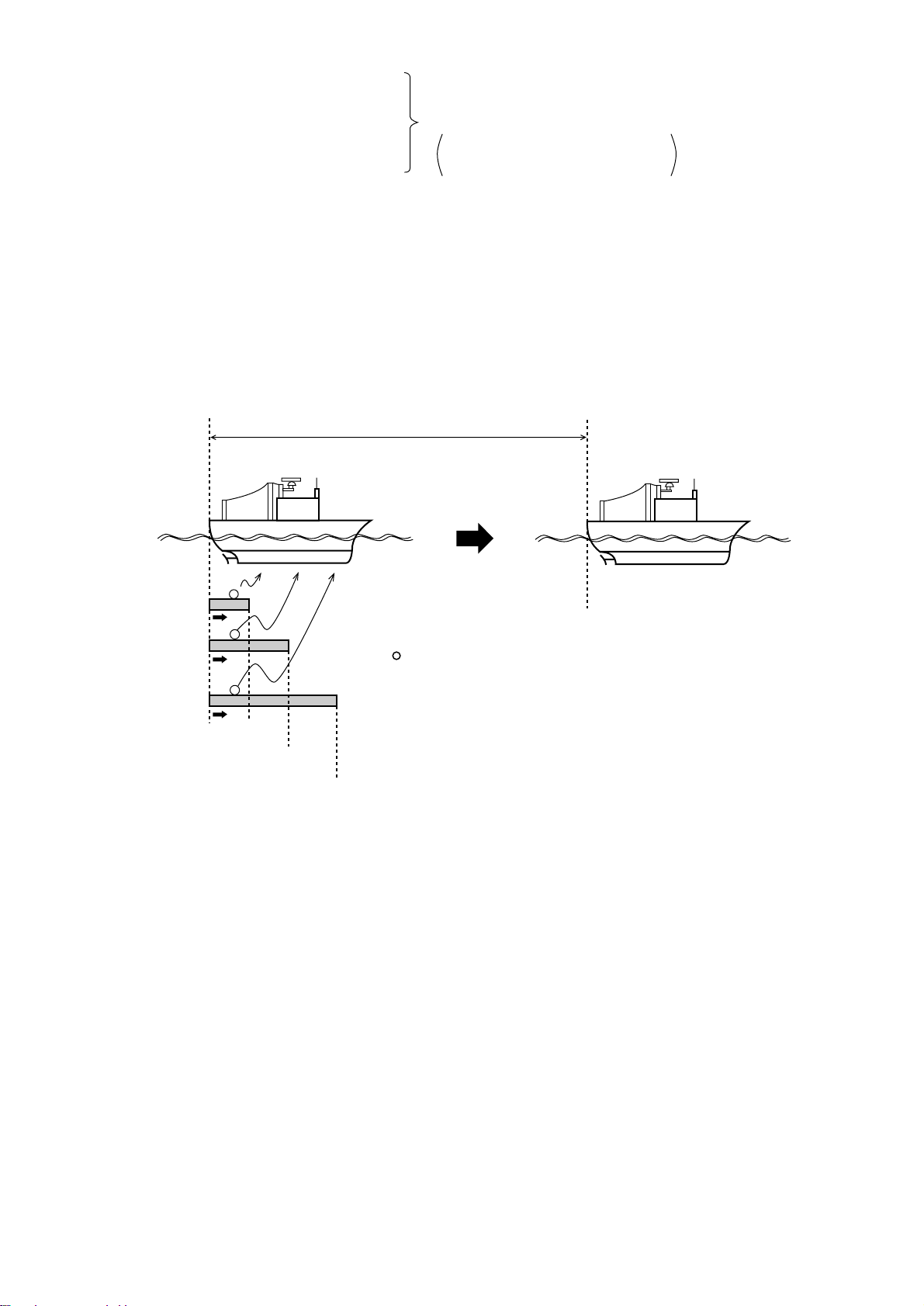
Tide differential calculations in water tracking mode
Tide speeds of layer A (C1) and layer B (C2) relative to near-surface layer (Vw) are calculated as
follows:
D1 = Vw - Vwa (Speed of layer A based on near-surface layer)
D2 = Vw - Vwb (Speed of layer B based on near-surface layer)
The tide differential (Dd) between layers A and layer B is;
Dd = D2 - D1
= (Vw - Vwb) - (Vw - Vwa)
= Vwa - Vwb
= 8 - 5
= 3 (kt)
or
Dd = D1 - D2
= (Vw - Vwa) - (Vw - Vwb)
= Vwa - Vwb
= 5 - 8
= -3 (kt)
Tide differential based on layer A
Speed of layer B viewed from
layer A
Tide differential based on layer B
Speed of layer A viewed from
layer B
If you compare the results of calculations on this page with the ones on preceding pages, you will
find the tide differential of two layers is identical irrespective of tracking mode.
1-8
Page 21
CHAPTER 2. OPERATION
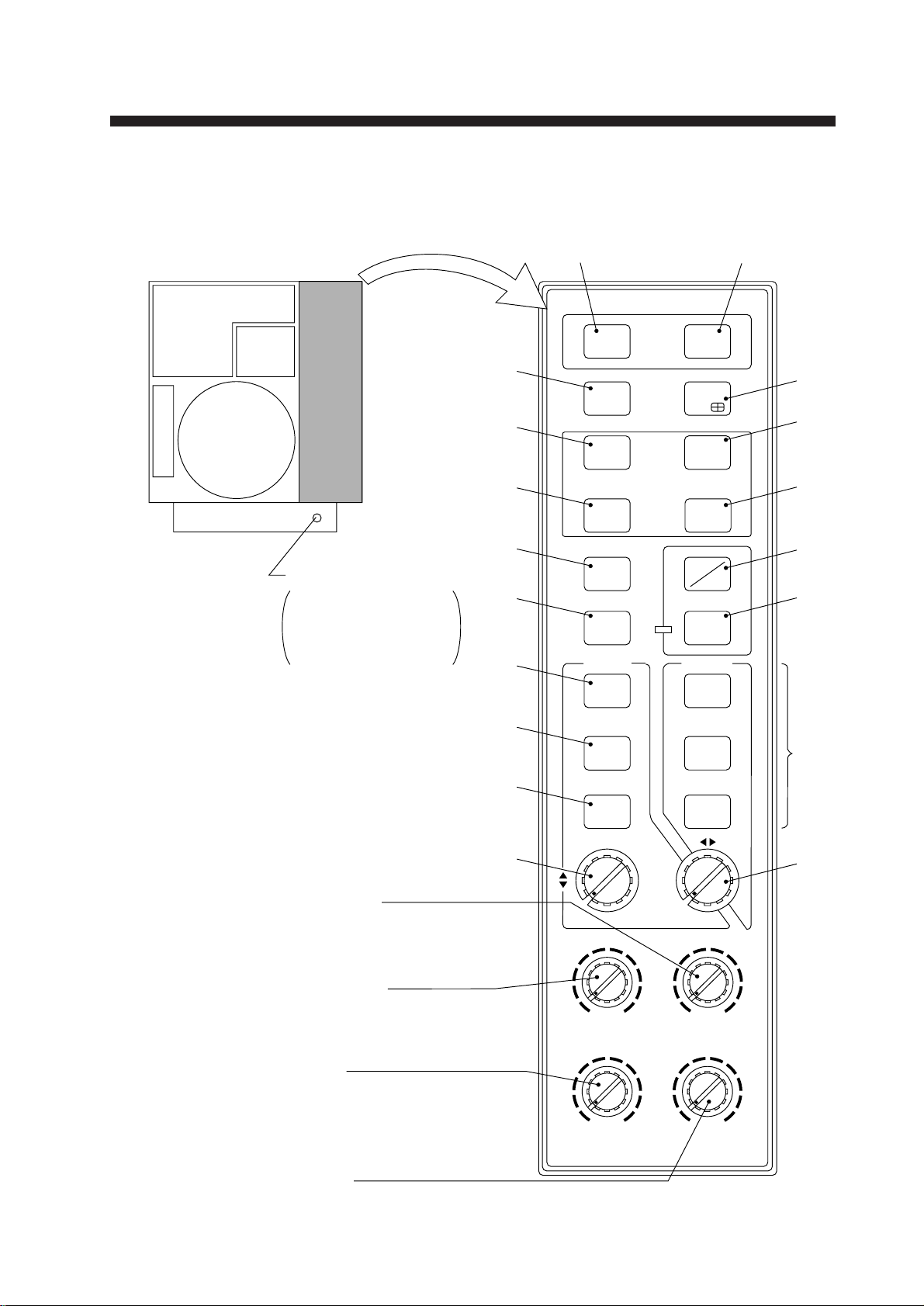
1. CONTROL PANEL LAYOUT
Control panel
1
2
DEGAUSS button
Press this button when
picture is distorted or
coloration is unbalanced
due to magnetization.
4
6
7
!0
!1
!4
!5
!6
PWR
TIDE
EFFECT
DRIFT
TIDE
DIF
TRIP
TRACK
MODE
ALARM
RANGE
MENU
OFF
EVENT
COURSE
PLOT
HISTORY
HU
NU
MANUAL
TRACK
LAYERMENU
LYR
1
LYR
2
LYR
3
3
5
8
9
!2
!3
CONTRAST control
!9
Adjusts display color contrast.
BRILLIANCE control
@0
Adjusts display brightness.
DIMMER control
@1
Adjusts illumination brightness of
control panel and manual tracking
indication lamp.
VOLUME control
@2
Adjusts volume of key beep and
audible alarm.
!8
64
28
0
10
BRILLIANCE
28
0
10 0
DIMMER
28
0
CONTRAST
64
28
VOLUME
!7
64
10
64
10
2-1
Page 22

2. FUNCTION OF KEYS AND CONTROLS
KEY FUNCTION/OPERATION REMARKS
1
2
3
4
5
6
7
PWR
OFF
EVENT
TIDE
EFFECT
COURCE
PLOT
DRIFT
TIDE
DIF
POWER ON :
POWER OFF: +
Plots event mark “+” at ship’s present position.
Event mark moves relatively as ship runs.
Functions as “ENTER” key or “EXECUTE” key when menu window
is open.
Starts tide effect plotting. (A cast mark “ ” is plotted at the start
point.)
Tide effect plotting shows movements of layers beneath ship’s
course track.
To stop plotting and to clear traces, press this key again.
(Once cleared, previous traces can not be recalled.)
Switches on and off the course plot display.
(Even while the plot display is off, positions are sampled internally,
and ship’s course made of last 200 sampled points is called up
instantly.)
Presents set/drift information at upper-right section of the display.
Presents tide difference information at upper-right section of the
display.
PWR
PWR OFF
16 event marks
maximum
Alternative
selection
8
9
!0
!1
HISTORY
HU
NU
TRIP
TRACK
MODE
Pressing this key presents a tide history of last 24 sample points.
(Only the histories of active layers appear.)
History display is automatically cleared upon completion of a
presentation sequence.
Switches presentation mode of vector/course plot display between
north-up and head-up.
Heading line (white broken radial) appears when north-up mode is
selected.
Clears and starts trip time or trip distance count.
Changes tracking mode cyclically.
MENU 4-WT SPEED: “T/D”
GT
(*2)WT(*1)
MENU 4-WT SPEED: “NAV-TIDE”
GT
NAV
(*2)
(*1)
AUTO
(*3)
AUTO
(*3)
*1: Select “T/D” or “NAV-TIDE” in MENU 4- “WT SPEED”
to switch between “WT” and “NAV” mode.
*2: “MAN” appears when tracking ground manually.
*3: “EXT” appears when taking external depth data as
reference.
Sampling time
interval of tide
history can be
selected at
MENU 1.
North-up modes
requires
external
heading data.
To select trip
time or trip
distance
display, set
alarm distance
limit or time limit
at the ALARM
menu.
2-2
Page 23

KEY FUNCTION/OPERATION REMARKS
!2
!3
MANUAL
TRACK
LYR
1
LYR
2
LYR
3
Enables manual bottom acquisition in ground tracking mode.
PREPARATION
1. In MENU 2, set “REF DEPTH” to “OFF.”
2. Select ground tracking mode.
MANUAL BOTTOM ACQUISITION
3. Press and hold key until LED lamp on the left of the key
MANUAL
TRACK
lights.
(Mode display should change from “GT” to “MAN”.)
4. Turn knob to place manual acquisition cursor ( ) on
the bottom echo in the echo level display.
5. Press key again when bottom echo is acquired.
MANUAL
TRACK
Selects tide measuring depth for the layer.
LYR
1
LYR
2
LYR
3
Set desired depth.
Color of depth
appears in value
green.
Press any key to
store the depth.
!4
!5
!6
!7
!8
ALARM
RANGE
MENU
NOTE: If “BTM TIDE TRK” is set to “ON” in MENU 3, the depth of
layer 3 is automatically adjusted to near-bottom depth.
(“BTM” appears instead of depth value.)
Calls ALARM menu to set alarm conditions for various items.
¡Tide speed/direction
¡Ship speed/bearing
¡Tide dif. speed/direction
¡Trip time/distance
Calls RANGE menu to set range scales for various items.
¡Vector speed range
¡Echo level depth range
¡Course plot depth range
¡Echo strength gradation range
Calls basic MENU for various fundamental settings.
(Sub-menus, MENU 1 thru MENU 4, are available.)
¡Sets value or specifies mode option for a selected item in menu
window. (Related to keys !2 to !6.)
¡Used to set ship’s heading manually, when external heading data
is not available.
¡Selects an item in a menu window.
(Related to keys !4 to !6)
¡Adjusts radius of range cursor (variable range marker) on the
vector display. Distance to the ring appears at the upper-left part
of the vector display.
See page 4-11.
See page 4-10.
See page 4-1.
2-3
Page 24

3. OPERATING PROCEDURE
SUBJECT/PURPOSE OPERATON (ACTION)
Power-on ¡Press key.
1
Display brilliance adjustment ¡Turn BRILLIANCE control. (CW : Bright, CCW : Dark)
2
3
Setting measuring depth
¡Press and turn knob to set depth. After setting, press
PWR
LYR
n
any key.
4
Selecting tracking mode
¡Tap key to select tracking mode.
TRACK
MODE
GT/WT/AUTO or GT/NAV/AUTO.
*Use ground tracking mode if water depth is shallower than 200m.
*Select “T/D” or “NAV-TIDE” in MENU 4 - “WT SPEED” to switch
between WT and NAV mode.
5
Reacquiring of temporarily
lost ground echo
(Manual bottom acquisition)
¡Press and hold key until “MAN” appears instead of “GT”.
(LED to the left of this key lights.)
¡While watching echo level display, turn knob to place
MANUAL
TRACK
acquisition cursor on the bottom echo.
MANUAL
TRACK
HU
NU
RANGE
RANGE
6
Changing presentation mode
for vector graph display
7
Setting ranges
¡Speed range for tide
vector display
¡Press key when bottom acquisition is completed.
¡Press key to alternate “Head-up” mode and “North-up”
mode.
¡Press key to call range menu.
¡Set desired range by and knobs.
¡Press key again to store the setting.
¡Distance range for course
plot display
¡Depth range for echo level
display
¡Color gradation level for
echo level display
10
11
12
13
2-4
8
Setting conditions for
measurements and displays
9
Setting alarm limits
¡Ships speed/course
¡Tide speed/direction
¡Tide dif. speed/direction
¡Trip time/distance
Plotting event mark
(Storing present position)
Starting and stopping tide
effect plotting
Switching course plot
display on and off
Power-off
¡Press key.
¡Set desired condition by / knobs and key.
¡Press key again to store the settings.
¡Press key to call alarm menu.
¡Set desired alarm conditions by / knobs and key.
¡Press key again to store the settings.
¡Press key.
¡Press key.
¡Press key.
¡While pressing and holding down key, press key.
MENU
MENU
ALARM
ALARM
EVENT
TIDE
EFECT
COURSE
PLOT
EVENT
EVENT
PWR OFF
Page 25

1. DISPLAY SAMPLES
CHAPTER 3. DISPLAY
Sample 1
Ground Tracking Mode
(Ground echo available: GRN)
Tide Differential Display
(Based on layer 1)
Tide Vector Display
(North-up mode)
Ship’s speed vector: GRN
Layer 1 tide vector: YEL
Layer 2 tide vector: PPL
Layer 1 tide vector: L-BLU
Tide dif. vector (1 2): YEL/PPL
Tide dif. vector (1 3): YEL/L-BLU
Fixed Range Ring (s): WHT ring
Range Cursor (VRM): GRN ring
Sample 2
Auto-Tracking Mode
Ground tracking : GRN
Nav-aided (GPS): BLU
Drift Display
Set : Deviation of true course
from ship’s heading
Drift : Lateral speed
Tide Vector/Course Plot/Tide Effect
Display (Head-up mode)
Ship’s course track:
WHT line
Tide effect traces:
Colored dotted lines
Event mark ( + )
Cast mark ( ) *
Start of tide effect
plotting
3-1
Page 26

2. HOW TO READ THE DISPLAY
The display screen of the CI-35/35H is roughly divided into five sections as shown below . What is
displayed in each section and how to use it is described on the following pages.
FUNDAMENTAL DATA
display section (Text)
ECHO
LEVEL
display
section
(Graphic)
DRIFT & TIDE
DIFFERENTIAL
display section
(Text & Graphic)
TIDE VECTOR/
COURSE PLOT
display section
(Graphic)
MISCELLANEOUS
3-2
DATA display section
Page 27

FUNDAMENTAL DATA SECTION
0
10
20
10
20
3°
0.4
kt
SPEED
8.0
kt
W
273
°
COURSE MODE COMPASS
GT
270.0
1.2
17 : 41 : 00
3.0
kt
2.0
kt
4.0
kt
NE
45
°
SE
135
°
SW
225
°
DEP
TIDE
DIRECTION
TRIP
0.00 NM
RANGE
10.0kt
0.5
NM
AVERAGE
15sec
DIST
0.5
NM
NW
N
NE
-1-2 1 2
1
25
2
50
3
75
Ship’s speed and course (true)
Ship’s heading
Course calibration angle
(Displayed in NAV mode)
Calib. by GT : GRN
Calib. by WT : L-BLU
Manual calib. : WHT
SHIP’S SPEED/COURSE Display
Note: The CI-35/35H updates ship’s speed and course display in every 3 seconds with an averag-
ing time selected in MENU 1. (See page 3-5 for averaging time setting.)
True course
N
The course display appears in degrees and 32-point notation. If desired their locations can be swapped
by changing the setting of an internal DIP switch. (See installation manual.)
Heading
(Compass bearing)
Speed toward true course
Ground speed, water speed or
Navigator speed depending on
the tracking mode.
3-3
Page 28

TRACKING MODE Display
FUNDAMENTAL DATA SECTION
SPEED
8.0
DEP
1
Displays nav data source
when NAV mode is selected.
¡GPS: GPS navigator
¡LC : Loran-C navigator
¡DC : Decca navigator
¡DR : Dead-reckoning
¡LA : Loran-A
Tracking mode and echo
availability for last 2 minutes.
Flows leftward every 3
seconds.
Right most segment shows
latest status.
TIDE
G TGPS
kt
W
NE
COURSE MODE COMPASS
GT
¡
273
DIRECTION
¡
45
¡If NENU2- WT SPEED is
set to T/D ;
GT NAV AUTO
¡If NENU2- WT SPEED is
set to NAV-TIDE ;
GT NAV AUTO
Color represents tracking mode
Green : Ground tracking mode
Blue : Water tracking mode
Blue : Nav-aided mode
Blank section: Reference echo lost
270.0
17 : 41 : 00
TRIP
0.00 NM
TRACK
MODE
changes tracking
mode cyclically.
key
Ground Tracking Mode: Shows absolute ship and tide movements based on ground.
(*1)
(Bottom echo required.)
Water Tracking Mode : Shows movements of ship and tide relative to near-surface water.
Nav-aided Mode : Shows ship’ s movement measured by the external navigation equip-
ment, and the tide movements based on the nav speed data.
Auto Tracking Mode : Uses ground tracking mode when bottom echo is available. Switches
(*2)
to water tracking mode (or nav-aided mode) when bottom echo is
lost. Bottom echo is continuously searched for, and if re-acquired
the ground tracking mode is restored.
(*1) Manual bottom acquisition is possible to disable unexpected bottom search when bottom
echo is interrupted for a short period by air bubbles, or to avoid tracking on bottom fish.
(See page 2-2 to enable manual ground tracking.)
(*2) For efficient and reliable bottom search in the auto tracking mode, depth data from an echo
sounder can be used as a reference. In this case, “EXT” appears as a tracking mode identifier. (See page 4-4 to enable external depth input.)
3-4
Page 29

FUNDAMENTAL DATA SECTION
ERROR Status display
When a source data for calculation and display seems to be abnormal, the following error indication appears on the display. This is to alert the operator not to rely on the related data.
No data from the Transceiver Unit.
(Red block mark above kt )
SPEED
12.3
DEP
1
5
2
18
3
30
4
Invalid depth setting
(depth indication in red)
TIDE
1.2
0.8
0.5
1
kt
kt
kt
kt
AVERAGE
2
SE
N
NW
NE
3
No reference data for ship s speed.
( kt in red box)
COURSE MODE COMPASS
GT
¡
135
DIRECTION
¡
0
20
¡
320
¡
45
N
No echo from the layer.
( kt in red box)
270.0
0.00 NM
10
17 : 41 : 00
TRIP
0
10
3¡
0.4
kt
20
1 If data is not received from the Transceiver Unit, a red square mark appears above “kt” in the
SPEED display frame. As display data are not updated, do not rely on any data.
2 If the reference data for ship’s speed measurement is missing, the “kt” in the SPEED frame is
enclosed in a red box. That is, no ground echo in the ground tracking mode, no reference water
echo in the water tracking mode or no speed (position) data in the nav-aided mode. Do not rely
on the ship’s speed/course and all tide speed/direction display.
3 If echo from a particular layer is too weak the unit denotes it by circumscribing “kt” in the TIDE
frame in red. Do not rely on the tide speed/direction of the layer.
4 If an invalid measuring depth (*) is set, the depth value for the layer appears in red.
(*) Measuring depth of shallower than 13 meters or deeper than 3/4 of seabed depth is regarded
as invalid depths.
3-5
Page 30

FUNDAMENTAL DATA SECTION
TIDE SPEED/DIRECTION Display (text)
Tide speeds/directions of three layers are displayed below the ship’s speed/course.
Depending on the tracking mode in use, the meaning of speed/direction changes as follows
` In the ground tracking mode, speed/direction values represent movement of the layer rela-
tive to ground. [Ground-based tide = Absolute tide]
` In the water tracking mode, speed/direction values represent movement of the layer relative
to near-surface water . Strictly speaking, they do not represent tide but tide differential. [Sur face-based tide = Relative tide]
` In the nav-aided mode, speed/direction values represent movement of the layer relative to
pseudo ground. [Ground-based tide = Absolute tide]
(Note that accurate ship’s speed/course and heading information must be applied to CI-35/
35H to obtain reliable tide data.)
To set measuring depth of tide;
Select layer by key, and turn knob to see desired depth.
Depth value of the
selected layer
appears is green.
Press the same
key again when
desired depth is
set. The depth
value will return to
white.
Layer 1 (Yellow)
Layer 2 (Purple)
Layer 3 (Lightblue)
LYR
1
LYR
2
LYR
3
12.3
DEP
1
15
2
18
3
30
SPEED
TIDE
1.2
0.8
0.5
kt
kt
kt
kt
AVERAGE
COURSE MODE COMPASS
NE
DIRECTION
ENE
N
NE
Tide speed in knots.
Tide direction in degree and in
32-point notation.
Locations of degree and 32-point
notation can be swapped.
(See page 5-1.)
45°
68
0
45
N
GT
°
20
°
°
270.0
0.00 NM
10
17 : 41 : 00
TRIP
0
3°
0.4
10
20
kt
Measuring depth of the layer
Note: Tide speed/direction display is updated every 3 seconds. The display is not raw data for
every 3 seconds, but averaged for specified averaging time. (See page 4-2 to set averaging
time for tide display.)
3-6
Page 31

FUNDAMENTAL DATA SECTION
Ground Tracking Mode Water Tracking Mode
Ship’s movement
based on ground
Direction
N
Layer 1
Measuring
depth
Tide movement
of layer 1
Speed
Layer 2
Layer 3
Seabed
Tide movement
of layer 2
Tide movement
of layer 3
Layer 1
Tide movement of
layer 1 relative to
surface water.
Layer 2
Layer 3
Tide movement of
layer 2 relative to
surface water.
Tide movement of
layer 3 relative to
surface water.
Ship’s movement
relative to surface
water.
Surface Layer
(Reference layer)
Nav-aided Mode
Layer 1
Tide movement
of layer 1
Layer 2
Layer 3
Tide movement
of layer 2
Tide movement
of layer 3
GPS Satellies
Ship's movement
measured by
using satellies
(Base on ground)
3-7
Page 32

PRESENT TIME Display
ALARM
FUNDAMENTAL DATA SECTION
SPEED
12.3
DEP TIDE DIRECTION TRIP
1
1.2
15
2
0.8
18
3
0.5
30
` Refer to page 4-4 to set date/time of the internal clock. (MENU 2 - “DATE/TIME”)
` It is possible to display time data received from the external navigation equipment, instead of
the internal clock. However, the time display may not increment every one second since the
time update depends on the incoming data interval. Refer to page 4-8 to use the external clock.
(Set MENU 4 - “TIME DATA” to “EXT”.)
` Date is not displayed in the standard screen, but on top line in the MENU window.
AVERAGE
kt
kt
kt
kt
SE
N
NW
NE
COURSE MODE COMPASS
GT 270.0
135
0
320
45
N
°
°
20
°
°
0.00 NM
10
17 : 41 : 00
0
3°
0.4
Present time
10
20
Trip time
(or Trip distance)
kt
TRIP TIME/DISTANCE Display
The TRIP function is used to measure distance-run in a certain time or time-elapsed to run a certain
distance. It is also possible to cause audible and visible alarm when a certain time limit or distance
limit is reached.
T o set time limit or distance limit, call ALARM menu by the
in the “TRIP” option. (See page 4-15.)
Note that the time limit setting provides trip distance on the TRIP window, and the distance limit
setting provides trip time display. (Time and distance are interlocked.)
To start trip count, press the
The count increments as vessel moves or as
time elapses.
When time limit or distance limit is reached,
counting is stopped, the distance or time count
in the TRIP window turns red, and the audible
alarm, if enabled, sounds.
TRIP
key.
Distance limit set to “1 nm”
TRIP
Count start
key and enter desired values
TRIP
1 nm
00 : 05 : 32
Time-elapsed
to run 1 nm
(5 min 32 sec)
3-8
Page 33

SET & DRIFT Display
DRIFT/TIDE DIF SECTION
Press the
DRIFT
COMPASS
MODE
GT
20
270.0
0.00 NM
10
17 : 41 : 00
TRIP
0
10¡
0.4
NE
12
key to call the set and drift display.
1Set angle (Leeway angle)
(20¡ port to 20¡ starboard)
Deviation of true course from ship s
heading.
10
20
kt
2Drift speed (lateral speed)
(9.9 kt port to 9.9 kt starboard)
Filled arrow shows drifting direction.
True course
(Leeway)
1
N
2
TIDE DIFFERENTIAL Display
Press the
(∗)
TIDE
MODE COMPASS
GT
TIDE DIF 3
key to call the tide differential display.
DIF
270.0
17 : 41 : 00
TRIP
0.00 NM
1
0.5kt S/E
2
0.7kt SW
NE
12
1Reference layer number
See page 3-3 to set reference layer.
2Tide differential
between reference
layer and shallower
of the other two
layers.
3Tide differential
between reference
layer and deeper of
the other two layers.
(Ex.) Ref layer = #3
Shallower
layer (#1)
Deeper
layer (#2)
Tide dif.
(3 1)
Tide dif.
(3 2)
(∗) Colors in bar correspond to layers used for
tide differential measurement.
Ref layer (#3)
3-9
Page 34

TIDE VECTOR/COURSE PLOT SECTION
TIDE VECTOR Display
` Each tide vector can be switched on and off independently by MENU 1 - “LAYER n” setting.
(Refer to page 4-2.)
` Tide differential vectors can be switched on and off by MENU 1 - “TIDE DIF DISP” setting.
(Refer to page 4-2.)
` Each vector bar indicates “flowing to” own ship direction with the standard factory setting. It is
possible to reverse the pointing direction to “flowing from.”
1
Tide vectors
N
4
WE
2
3
Heading line
Tide differential
vectors.
5
S
Presented in North-up
mode only.
Note: If vector bars of two or more layers point in the same direction, only the vector bar and the
direction mark of the shallowest layer appear.
1
(YEL)
2
(PPL)
3
(L-BLU)
Ground Tracking Mode
(See page 3-6)
Absolute tide movement
of layer 1
Absolute tide movement
of layer 2
Absolute tide movement
of layer 3
Water Tracking Mode
(See page 3-6)
Relative tide movement of
layer 1 based on surface
layer.
Relative tide movement of
layer 2 based on surface
layer.
Relative tide movement of
layer 3 based on surface
layer.
Nav-aided Mode
(See page 3-6)
Absolute tide movement of
layer 1 (nav-tide)
Absolute tide movement of
layer 2 (nav-tide)
Absolute tide movement of
layer 3 (nav-tide)
3-10
4
5
Tide differentials between a specified reference layer and the other two layers.
(Ex. Ref. Layer = #2)
PPL
YEL
PPL
LBLU
Measuring layer
(Right half)
2 1
2 3
. . . . . . .
. . . . . . .
PPL YEL PPL YEL
PPL
LBLU PPL LBLU
Ref. layer
(Left half)
Page 35

TIDE VECTOR/COURSE PLOT SECTION
TIDE HISTORY Display
The CI-35/35H can hold last 24 tide samples collected at a time interval of 15 sec, 1 min, 5 min, 10
min, 30 min or 1 hour . The tide history presents variation of these tide information with a string of
round marks. That is, distance from the graphic center to a mark represents tide speed at the sample
time, and the direction from the center to a mark represents tide direction.
The figure below can be interpreted that the tide has changed from SW to NE (opposite) direction.
` To call the tide history display, press the
HISTORY
key. The tide history of layers activated in
MENU 1 - “LAYER n” are displayed. (The figure below shows history of only one layer.)
` To restore normal tide vector display, press the
HISTORY
key again.
Tide history of layer 1
(last 24 samples)
N
NW
W
Present tide vector for layer 1
NE
E
SW
You can select sampling time interval
of tide history in MENU 1.
(See page 4-2.)
Interval
S
SE
Note: The CI-35/35H preserves the tide history data stored in the memory when the power is off.
3-11
Page 36

TIDE VECTOR/COURSE PLOT SECTION
RANGE
COURSE PLOT Display
The course plot display provides ship’s track of last 20 minutes (200 points, one point sampled
every 6 seconds). Event positions, stored by the
` Press the
COURCE
PLOT
key to call course plot display, and press the same key again to restore
previous display.
N
NW
W
EVENT
NE
key, are also plotted with “+” marks.
Present position
E
Event marks
Positions memorized by
EVENT
the key.
SW
S
Ship’s track
(200 points max.)
` To change display range (distance range) of course plot, press the
SE
key and set desired
‘DIST RANGE’ in the RANGE menu. (See page 4-10.)
` To clear event memory (marks), select ‘ERASE’ in MENU 1 - “EVENT” and then press the
EVENT
key.
Note: ` Capacity of ship’ s position memory (for course plotting) is limited to 200 points. When
the position memory is fully occupied, the oldest position is erased as new one comes in.
` Position memory will erased when the power is turned off.
` Sampling interval of ship’s position is fixed to 6 seconds, and it can not be changed.
3-12
Page 37

TIDE VECTOR/COURSE PLOT SECTION
Virtual
buoys
Layer 1 (YEL)
Layer 2 (PPL)
Layer 3 (L-BLU)
Layer 1
Layer 2
Layer 3
Virtual
buoys
Interval
(6 sec)
100 points max.
( = 10 minutes)
TIDE EFFECT Display
The tide effect display is useful for estimating three-dimensional deformation of cast net by the
effect of tides at different depths. Notice that display merely shows movements of layers; it does
not show true net shape in the water.
Assume that you put drifting marks (virtual
buoys) on the net at each layer below the vessel at an interval of six seconds.
As the marks move with the tides keeping the
same speeds and directions, a series of marks
makes a brief section shape of the net at the
layer.
In practice, a net does not sink immediately,
because of various tensions and stresses placed
on it. Thus, use the tide effect information only
as a reference.
Cast mark
(Start of tide effect plot)
Buoy track of layer 1 (YEL)
Buoy track of layer 2 (PPL)
Buoy track of layer 3 (L-BLU)
Ship’s course track (WHT)
` To start “tide effect plotting”, press the
` To stop plotting and to clear traces, press the
TIDE
EFFECT
key.
TIDE
EFFECT
key again.
3-13
Page 38

TIDE VECTOR/COURSE PLOT SECTION
Current Ship's
position always at
screen center.
Buoy track of layer 1
Buoy track of layer 2
Example of tide effect plotting Display (Head-up)
b
Buoy track
of layer 1
Buoy track
of layer 2
Tide of layer 2
Tide of layer 1
a
d
c
d1
c1
Casting the first virtual
buoys at point “a”, vessel
made 1/4 of a circle and
reached point “b”.
Assume that each buoy
moves on each layer keeping the same speed and direction as at time of
measurement.
As time passes, the first
buoys should move as lows:
` c → c1 → c2 → c3:
(Layer 1)
` d → d1 → d2 → d3:
(Layer 2)
c2
c3
d2
If the above situation is presented in the head-up mode,
the display will change as
shown right.
If there is no tidal movement, the ship’s course and
the buoy tracks will coincide.
If all layers are moving at
the same speed and direction, buoy tracks of all layers should coincide.
d3
3-14
Page 39

DRIFT Display
TIDE VECTOR/COURSE PLOT SECTION
Switched on and off
in MENU 1
W
NW
SW
N
NE
-1-2 1 2 -1-2 1 2
SE
S
North-up Head-up
Lateral speed (drift)
True course
(Leeway)
E
Heading line
SW
SN
SE
HEAD-UP/NORTH-UP Presentation
HU
The
key switches between “HEAD-UP” mode and “NORTH-UP” mode.
NU
W
NW
NE
E
W
SW
S
SE
E
Head-up North-up
NW
NE
Screen top is always
ship’s heading direction
(No heading line.)
Heading line
N
(Bow mark)
NW
WE
SW
RANGE CURSOR (Variable Range Marker)
DIST
2.8 NM
Range cursor (green ring)
N
NE
SE
S
Distance from ship
to range cursor.
` The knob adjusts the radius of the
range cursor.
3-15
Page 40

ECHO LEVEL SECTION
Display mode
ECHO LEVEL Display
Two presentation modes are available for echo level display.
` The “COLOR” mode provides narrow echograms for three directions, presenting echo strengths
in color gradation. (Color sounder mode)
` The “GRAPH” mode presents echo strengths of three beams with amplitude varying with depth.
(A-scope mode)
Echogram of beam 3 (port)
Echogram of beam 1 (fore)
Echogram of beam 2 (starboard)
selectable in MENU 1
History for last 5 minutes
Depth mark of layer 1
Depth mark of layer 2
Depth
Depth mark of layer 3
Cursor for manual bottom
acquisition (See procedure
below.)
Bottom echo
Depth range
Range selectable at
RANGE menu
m
Echo strength
Transmission pulse
Echo strength
(Layers 1, 2 and 3)
Bottom echo
150
COLOR GRADATION mode
(Echo history for 5 minutes)
AMPLITUDE GRAPH mode
(Realtime A-scope)
` When bottom echo is lost for a short while due to air bubbles, or the equipment tends to track on
false bottom, try to acquire it manually.
1. Set “REF DEPTH” to OFF in MENU 2.
2. Select ground tracking mode by the
3. Press the
MANUAL
TRACK
key for more than 1 second. LED indicator aside the key lights and the
manual tracking cursor appears in the echo level display.
4. Turn
knob to place the cursor on the bottom echo.
5. When bottom echo is acquired, press the
tracking mode. (Do not leave the equipment in the manual tracking mode.)
Manual tracking cursor
3-16
TRACK
MODE
key.
MANUAL
TRACK
key to return to the automatic ground
Bottom echo
Page 41

MISCELLANEOUS DATA
WATER TEMPERATURE Display
(Temperature data from external equipment required.)
` You can switch the temperature display on and off in MENU 1.
Time scale (Span: 17 min 30 sec)
51015
20.0
15.0
14
11
TEMP
17.2
Temperature range
Present water temperature
Range width is fixed for 5˚C. It is
shifted automatically to bring
present temperature near center of
the scale.
3-17
Page 42

MISCELLANEOUS DATA
MISCELLANEOUS DATA Display
(Tide Averaging Time/Total Mileage/Display Range)
` You can change the unit of distance/range to km by an internal DIP switch.
(Refer to installation manual.)
Speed range
Display limit of tide
vector bars.
Tide data averaging
time.
Averaging time
selectable in MENU1
See page 4-2.
AVERAGE
15sec
DIST
0.5
NM
N
NW NE
Distance range
Distance from center to
range cursor (green)
Range ring (s)
(Number of rings changes with range.)
Total mileage count
(0.01 NM steps)
To reset count (zero),
See page 4-4.
Distance from center to
outermost ring
RANGE
10.0kt
5.0
NM
NM
99999.99
Range
selectable in
RANGE
menu (See
page 4-10.)
3-18
Page 43

CHAPTER 4. SETTING OPERATING
MENU
LYR
3
General Rules for Menu Selection
Main item selection: Turn knob.
¡CW to move cursor upward
¡CCW to move cursor downward
** MENU 1 **
KNOB ITEM
MENU MODE
REF TIDE DIF
: MENU1
: LAYER1
: 2min
MENU2
LAYER2
Mode option selection: Turn Knob.
Value setting: Turn Knob.
Validating settings and terminating menu: Press key.
¡CW to move cursor right
¡CCW to move cursor left
¡CW to increment Value
¡CCW to decrement value
MENU
Jan/15/1997
CONDITIONS
The CI-35/35H has three menus which you can preset various conditions for measurements and
presentations; basic menu range menu and alarm menu.
1. BASIC MENU
Pressing the
four pages of menus called “MENU 1”, “MENU 2”, “MENU 3” and “MENU 4”.
Important items in the menus appear in red to show that they are “locked” (protected) to prevent
accidental change of settings.
To select another menu page in the basic menu, place cursor on “MENU MODE” - ‘MENU n’ by
using
and knobs.
MENU
key calls the basic menu window on the display. The basic menu contains
** MENU 1 **
Jan/15/1997
MENU MODE
Item cursor
: MENU1
Option cursor
KNOB ITEM
MENU2
KNOB SETUP
END : MENU KEY
MENU3 MENU4
4-1
Page 44

MENU 1
(Note 1)
(Note 2)
(Note 3)
(Note 4)
* MENU 1 *
Jan/15/1997
MENU MODE
REF TIDE DIF
TIDE AVERAGE
TIDE HISTORY
LAYER1
LAYER2
LAYER3
TIDE DIF DSP
DRIFT DSP
EVENT
TEMP DSP
ECHO LEV DSP
BACKGROUND
KNOB ITEM
KNOB SETUP
END : MENU KEY
: MENU1
: LAYER1
MENU2
LAYER2 LAYER3
MENU3
MENU4
: 2 min
: 15 sec
: ON OFF
: ON OFF
: ON OFF
: ON OFF
: DRIFT SPEED OFF
: ERASE (0)
: ON OFF
: COLOR GRAPH
: NORMAL 1 2 3
1
2
3
4
5
6
7
8
9
!0
Knob
1Press key to store the settings and to erase the menu window.
2Reference layer for tide differential measurements
3Averaging time for tide display (0 to 5 min in 1 min steps)
4Tide history sampling time interval (15 sec, 1 min, 5 min, 10 min, 30 min or 1 hour)
Tide data of last 24 samples are kept in memory.
5Tide vector display on/off switch for each layer
6Tide differential vector display on/off switch
7On/Off switches for drift scale display and ship’s speed vector display in the vector graph
section
8To clear all event points (and marks), place cursor on “ERASE” and press key.
(Number in parentheses indicates number of event points stored.)
9Presentation mode of echo level display
“COLOR”: Color sounder mode (echo strengths in color gradation)
“GRAPH”: A-scope mode (echo strength in amplitude varying with depth)
MENU
Knob
EVENT
!0Background color (Select according to local lighting conditions.)
“NORMAL”: Darkgreen “1”: Darkblue “2”: Gray “3”: Darkgray
4-2
Page 45

NOTE 1
* Raw tide data is obtainable every 3 sec.
Tide averaging time of “1 min” means that averaged data for last one minute is displayed.
1 min
3 sec.
The oldest data is
discarded.
After
3 sec.
1 min : Average data for this
period is displayed.
latest raw
data
(Note) Averaging time of “0 min” does not mean immediate display of raw data but average of 15
seconds.
NOTE 2
If tide vector display of a layer is switched off, the colored block circumscribing that layer number (in the
fundamental data section) extinguishies.
NOTE 3
ECHO Level Presentation Mode.
Beam 1
(Fore)
Beam 3
(Port-aft)
Beam 2
(Stbd-aft)
Depth
Echo strength
Echo strength
with depth.
Different
color for
each
beam.
TX
pulse
bottom
echo
COLOR GRADATION
(Color sounder)
AMPLITUDE GRAPH
(A-scope)
NOTE 4
Menu items displayed in red (e.g., BACKGROUND) indicate they are protected against accidental
change of setting.
If a setting absolutely must be changed follow the procedure below. Be ware, however, that needless
change may seriously affect performance.
1. Place vertical cursor on a locked (protected) item by knob.
2. Turn knob clockwise by one step. The following message appears.
MENU SELECT IS LOCKED SET TO UNLOCK
UNLOCKED NO YES
PRESS EVEN KEY TO ENTER
3. Turn knob clockwise by one click to select “YES”, and then press the key.
4. Place horizontal cursor on desired option by knob.
You can unlock all protected items. For details see the next page.
EVENT
4-3
Page 46

MENU 2
(NOTE 1)
* MENU *
KNOB ITEM
Jan/15/1997
MENU MODE
(Note 2)
REF DEPTH
BEAM TEST
SELF CHECK
(Note 3)
(Note 1)
(Note 1)
(Note 1)
(Note 1)
1Press key to store the settings and to close the menu window.
DEMO DATA
TRIP RESET
DATE/TIME
MENU SELECT
MENU SET
Knob
MENU
: MENU1
: OFF
MENU2
E/S
: OFF
: SINGLE
CONT1 PANEL ECHO
: OFF DP3. 4 LOG10
: RESET (0. 00)
: TIME DATE
: LOCK UNLOCK
: FACTORY
KNOB SETUP
END : MENU KEY
MENU3
Knob
1
MENU4
2
3
4
5
6
7
8
9
2Selection of reference depth data source for bottom search in ground tracking mode
“OFF”: internal “E/S”: depth data from external echo sounder
3Shows beam number(s) being tested.
“OFF”: Test off (normal operation) “F1”: Testing beam 1
“F12”: Testing beams 1 and 2 “F13”: Testing beams 1 and 3
“F23”: Testing beams 2 and 3
4Test method and test item selection switch (See page 4-2.)
5Simulation data selection for demonstration
“OFF” for normal operation (See note 3 below.)
6Clear (zero) the total mileage count. (Value in parentheses shows total mileage.)
7Calls time set or date set sub-window.
8Lock/unlock switch for all the protected preset items shown in red letters.
9Restore factory settings.
4-4
Page 47

NOTE 1
Menu items shown in red are protected (or locked) to prevent accidental change of setting.
To change the setting of a protected item, follow the procedure below.
1. Place the vertical cursor on the item by using knob, and then turn knob clockwise by one step.
The following message appears.
MENU SELECT IS LOCKED SET TO UNLOCK
UNLOCKED NO YES
PRESS EVENT KEY TO ENTER
2. Turn knob clockwise by one step to select “YES”, and then press the key.
EVENT
EVENT
key.
3. Place the horizontal cursor on desired position, and press the key. There is no option item for
“TRIP PRESET” and “MENU SET”. Do not turn knob, but press the key immediately.
To unlock all protected items, place the cursor on MENU SELECT UNLOCK. Change of any
protected item setting must be done with the greatest if caution, otherwise measuring
accuracy may be degraded.
DATE/TIME settings
1. By using knob, place the vertical cursor onto “DATE/TIME”, and then turn knob clockwise by
one step. When you see the alert message window, turn knob clockwise by one step again to
select “YES”. Press key to proceed to data/time setting sequence.
2. Place the horizontal cursor onto “TIME”, and then hit the
The “TIME SET” sub-window should appear as shown below.
*TIME SET*
PRESS EVENT KEY TO ENTER
EVENT
KNOB ITEM
HOUR : 18
MINUTE : 0
SECOND : 0
KNOB SETUP
EVENT
EVENT
3. Select HOUR, MINUTE and SECOND by knob, and at each, turn knob to set correct value.
(Set a time 10 to 30 seconds ahead of actual time so you can press the key at the tone of a
time signal.)
4. Place the horizontal cursor to “DATE”, and the press the key. The “DATE SET” sub-window
appears. Set “YEAR”, “MONTH” and “DAY” with the arrow knobs.
NOTE 2
Used to select reference depth data source for
searching bottom echo in ground tracking mode.
“OFF”: Bottom search by its own sounding
(internal)
“E/S”: Bottom search by using depth data from
external echo sounder as a reference.
Tracking mode ID will be “EXT” instead of
“GT”.
If external depth data is not available, despite the
selection of “E/S”, an alert message appear on the
bottom part of the display. (Error number 103)
REF DEPTH selection
NOTE 3
Used to check the equipment or to enable the
demonstration by simulation signals generated
internally. Bearings depend on heading input.
EVENT
“DP3.4” .....
1
2
3
“LOG10” .....
EVENT
DEMO DATA selection
3.4 kt
3.4 kt
3.4 kt
3.4 kt
10.0 kt
N/E 10°
N/E 10°
N/E 10°
N/E 10°
N 0°
4-5
Page 48

MENU 3
(NOTE 1)
(Note 2)
(Note 3)
(Note 4)
(Note 6)
(Note 5)
* MENU 3 *
Jan/15/1997
MENU MODE
SHIP SPD AVR
DRAFT
WT SPD DEPTH
HEEL ANGLE
TRIM ANGLE
GT SPD CALIB
WT SPD CALIB
BEARNG CALIB
COURSE CALIB
EXT KP1 DIST
EXT KP2 DIST
BTM TIDE TRK
: MENU1
: 15sec
: 0.0 m
: 2.0 m
: 0.0 °
: 0.0 °
: 0.0 %
: 0.0 %
: 0.0 °
: 0.0 ° (GT 0. 0 ° ) (NAV 0. 0 ° )
: 0.0 m
: 0.0 m
: OFF ON
KNOB ITEM
MENU2
KNOB SETUP
END : MENU KEY
MENU3
MENU4
1
2
3
4
5
6
7
8
9
!0
!1
!2
!3
Knob
1Press key to store (validate) the settings and to close the menu window.
2Averaging time for ship speed/course display......(15/30/60/90 sec)
3Draft level; i.e., depth of transducer from sea surface......(0.0 to 25.6m)
4Reference depth to measure ship’s speed in water tracking mode......(2.0 to 25.6 m)
5Lateral (port-starboard) inclination angle (-12.8 to +12.7°)
“-”: starboard-high “+”: port-high
6Fore-aft inclination angle (-12.8 to +12.7°)
“-”: aft-high “+”: fore-high
7Ship speed offset in ground tracking mode
8Ship speed offset in water tracking mode
9Bearing offset angle of transducer (-12.8 to +12.7°)
“-”: transducer’s fore-aft axis deviated to port
“+”: transducer’s fore-aft axis deviated to starboard
!0Offset angle to align course by CI-35/35H and course by external naviator [GPS] (-12.8 to
+12.7°)
(GTx.x and NAVx.x are offset angles calculated by “CRS CALIB EXEC” operation in MENU 4.)
!1Distance between transducers of CI-35/35H and other sounding device which is connected to
the CI-35/35H as interfering source 1. (KP1)
!2Distance between transducers of CI-35/35H and other sounding device which is connected as
interfering source 2. (KP2)
MENU
Knob
!3Used to select depth setting of layer 3.
“OFF”: Manual setting
“ON”: Automatic tracking on near-bottom tide
4-6
Page 49

NOTE 1
NOTE 4
BEARING CALIB
All the items in MENU 3, except “MENU MODE”,
appear in red to show that they protected (or
“LOCKED”) items.
To unlock an item;
1. First, place the vertical cursor on the desired
item by knob, and then rotate knob
clockwise by one step. The following appears
on the display.
MENU SELECT LOCKED SET TO UNLOCK
UNLOCKED NO YES
PRESS EVENT KEY TO ENTER
2. Turn knob clockwise by one step to select
“YES”, and hit the key.
3. Protected item is now unlocked. Turn knob
to set desired value or option. Press the
EVENT
key to store new setting(s).
As noted previously you can unlock all protected items. Beware, however, that change
of setting may adversely affect equipment
performance. Caution before changing any
setting.
NOTE 2
Enter minus value if the boat (and transducer face)
is inclined to port side.
Port
+θ
EVENT
HEEL ANGLE
Stbd
Enter minus value if transducer’s fore-aft axis is
oriented to port side of ship’s bow.
NOTE 5
In the ON position, messuring depth of layer 3
changes automatically with the bottom depth to
track on near-bottom tide.
If it is “OFF”, normal selection of measuring depth
is attainable for the layer 3.
NOTE 6
If course indication by ground tracking mode differs
from that of navigator (GPS) even with a correct
bearing calibration, enter the course calibration
angle.
* Course calibration angle entered here will be in
effect only when “CRS CAL MODE” is set to MAN
in MENU 4.
* The way to automatically calculate and enter
calibration angle is provided in MENU4. (See
“CRS CAL EXEC” on the next page.
Bow
+θ
Transducer
BOTTOM TIDE TRACKING
COURSE CALIB
NOTE 3
Enter minus value if the boat (and transducer face)
is inclined to fore side.
TRIM ANGLE
+θ
Course by GT
mode of CI-35/35H
+θ
Course by external
navigator (GPS)
-θ
If course indication by
CI-35/35H is deviated to
clockwise direction,
enter calibration angle
with minus sign.
4-7
Page 50

MENU 4
(Note 1)
(Note 2)
(Note 3)
(Note 4)
(Note 5)
(Note 6)
(Note 7)
(Note 8)
* MENU 4 *
Jan/15/1997
MENU MODE
TIME DATA
WT SPEED
NAV FORMAT
NAV AID
: MENU1
: INT
: T/D
: CIF
: GPS
: LORAN-A
NAV DATA
TIME INT
CRS CAL MODE
CRS CAL EXEC
TIDE OUT INT
Knob
: L/L
: 1min
: GT
: START
: 15sec
KNOB ITEM
MENU2
EXT
NAV-TIDE
NMEA
LORAN-C
ALL
SPD
NAV
KNOB SETUP
END : MENU KEY
MENU3
DECCA
MENU4
DR
MAN
Knob
1
2
3
4
5
6
7
8
9
!0
1Press key to store (validate) the settings and to close the menu window.
2Selection of date/time display by internal clock (CI-35/35H) or external navigator’s clock
(GPS)
3Selection of tracking mode when ground tracking unattainable (water tracking or nav-aided)
4Selection of communication data format with external navigator (Furuno CIF or NMEA0183)
5Selection of source navigator to receive spd/pos data
6Selection of source data for ship’s speed/direction display in nav-aided mode
7Averaging time for converting position change into speed/data(1 to 10 min in 1 min steps,
effective only when selected “L/L” as NAV DATA above)
8Selection of method for automatic cource calibration calculation and calibration mode to use
“GT”: Calculates course calibration angle to equalize ground tracking course to that of
“NAV”: Calculates course calibration angle to equalize tides before and after 10 minute
“MAN”: Calculates course by using value entered manually in MENU 3-COURSE CALIB.
9Used to calculate course calibration angle if “or” is selected in CRS CAL MODE adove.
(Press EVENT key to start.)
MENU
external navigator after 2 mile run.
period.
!0Selection of data output interval (15sec, 30sec,1min, 2min, 5min or 10min)
4-8
Page 51

NOTE 1
TIME DATA
NOTE 5
NAV DATA
“INT”: Displays date/time of internal clock in CI-
35/35H. Time setting must be done
manually in MENU 2-DATE/TIME. Time
increments in every one second.
“EXT”: Displays date/time received from external
navigator. Generally, time is more accurate
than internal clock, but it may not increment
in one every second.
NOTE 2
“T/D”: Displays ship’s speed, tide and tide
“NAV-TIDE”: Displays ship’s speed, tide and tide
WT SPEED
dif. by using data obtained by CI35/35H alone. With “T/D” selected,
pressing TRACK MODE key
changes GT/WT/AUTO.
dif. by referring to the data from
external navigator. With “NAV-TIDE”
selected, pressing TRACK MODE
key changes GT/NAV/AUTO.
Selects sourse data for pseudo ground tracking
speed.
“L/L”: Calculates speed/course internally from
position data change. (Averaging time
interval can be set in TIME INT.)
“SPD”: Takes speed/course data from external
navigator as they are. (Select “SPD” if
connected with GPS.)
NOTE 6
If “L/L” is selected as NAV DATA, specify
averaging time interval in TIME INT.
(1 to 10 min in 1 min steps)
Longer interval eliminates display fluctuation of
speed and tide, but the response becomes slower.
1 min will be suitable to work with GPS.
NOTE 7
Automatic Course Calibration Procedures
TIME INT
CRS CAL MODE / CRS CAL EXEC
NOTE 3
“CIF”: Furuno CIF format. It is desirable to use
this format to get most accurate nav-tide.
“NMEA”: World standard format. Select this format
only when CIF is not available. (This may
not provide accurate nav-tide because of
its longer update interval.)
NOTE 4
Selects a data source (talker) if multiple nav aids
are connected.
¡Select “GPS” if available. (Degraded
performance with the other nav aids.)
¡With NAV DTA set to “ALL”, CI-35/35H
automatically selects a highest priority talker
available.
Priority: GPS>Loran-C>Decca>DR(Satnav)>
Loran-A
NAV FORMAT
NAV AID
¡“GT” mode (if ground tracking attainable)
1. Select GT mode by TRACK MODE key.
2. Set CRS MODE to “GT”.
3. Run at around 10 kt keeping same direction.
4. Set cursor on CRS CAL EXEC - “START”,
and press EVENT key. (calibration start)
Course calibration will be completed after you
run 2 n.m.
¡“NAV” mode (if ground tracking unattainable)
1. Select NAV mode by TRACK MODE key.
2. Set CRS CAL MODE to “NAV”.
3. Run at around 10 kt keeping same direction.
4. Set cursor to CRS CAL EXEC - “START”,
and press EVENT key. (calibration start)
5. When you have run for 5 minutes, turn your
head by 180° and return to the start point.
Course calibration will be completed after you
run 10 minutes. (to go and return)
NOTE 8
Specify data output interval if a data logging device
is connected to AUX port of the transceiver.
(Note that the CIF and NMEA data output intervals
are not affected by this setting.)
TIDE OUT INT
4-9
Page 52

2. RANGE SET MENU
2 Distance range
For course plot
display
RANGE
2.0kt
5.0
NM
1 Speed range
For speed vector
graph
4 Color gradation range
For echo level display
in color mode
100m
3 Depth range
For echo level
display
1. To change one of the above ranges, call the RANGE SET menu by pressing the
1Max. speed range
*RANGE SET*
KNOB ITEM
KNOB SETUP
END : RANGE
(Note 1)
SPEED RANGE
DIST RANGE
ECHO DEPTH
ECHO SHIFT
Knob
(Note 1) Changes the threshold levels for coloring echoes
with different strengths. (The higher the value, the
lower the thresholds, and vice versa.)
A gradation factor of 1 to 7 is recommended. The
higher (lower) the value, the greater the amount of
red (blue) in echoes.
: 10.0 kt
: 1.0 NM
: 150 m
: 1
Knob
2Distance from center
(ship’s position) to
outermost ring (for
course plot display)
3Max. depth range for
“echo level” display
4Color gradation factor
(1 to 36)
RANGE
of tide/tide
differential vector
display
1.0 to 20.0 kt in
0.1 kt steps
0.5 to 5.0 nm in
0.5 nm steps
50 to 700 meters in
50 meter steps
for “echo level” display
( * )
key.
Notice that the threshold shift dose not change the
receiver gain nor performance of the equipment,
although it changes echo color.
2. When desired range is set, press the
4-10
RANGE
key again.
Page 53

3. ALARM SET MENU
The ALARM menu permits selection of alarm sources and alarm parameters.
ALARM FOR TIDE/TIDE DIFFERENTIAL/SHIP’S MOVEMENT
This alarm is for alerting you to change in speed and direction of tide/tide dif./ship’s movement.
: Alarm range not set. (factory default)
: Alarm range (zone) is preset, but alarm function is inactive.
: Alarm function is active.
: Audible alarm is disabled. (Speaker OFF)
: Audible alarm is enabled. (Speaker ON)
**ALARM SET**
: ON
: OFF
1ST LAYER
2ND LAYER
3RD LAYER
(Note 1)
SHALLOW T/D
DEEP T/D
SHIP SPEED
TRIP
knob
(Note 1)
SHALLOW T/D: Tide difference between base layer and the shallower of the other two lay-
ers.
DEEP T/D : Tide difference between base layer and the deeper of the other two layers.
KNOB ITEM
EXEC : EVENT
: SPD
: SPD
: SPD
: SPD
: SPD
: SPD
: DIST
KNOB SETUP
END : ALARM
DIR
DIR
DIR
DIR
DIR
CRS
TIME
knob
REF.
LAYER
1
2
3
SHALLOW T/D
1 2
2 1
3 1
DEEP T/D
1 3
2 3
3 2
4-11
Page 54

ALARM setting procedure
1. Call “ALARM SET” menu by pressing the
ALARM
key.
2. By the knob, place the vertical cursor an the desired item; then select an option item by the
knob.
3. Press the
1) When the horizontal cursor is on a speaker mark, the
EVENT
key. The subsequent action depends on the location of the horizontal cursor.
EVENT
key functions to turn the
audible alarm OFF “ ” or ON “ ”.
Note that the audible alarm sounds for the items
with a filled star mark “
” beside them.
Audible Alarm
“ON”
EVENT
Audible Alarm
“OFF”
2) When the horizontal cursor is on an item which has the hollow star “ ” aside it or no star
mark, the range set display appears.
Ex. Selected “LAYER1” - “SPD
MAX
MIN
SET
1. 2kt
280°
LYR1 SPD
MIN 0.5kt
MAX 1.0kt
LYR1 DIR
MIN 0
MAX 0
”
Present tide
vector for layer 1.
MAX
MIN
Alarm range (zone)
As necessary , change alarm range (zone) by knob (MAX) and knob (MIN), and then press
EVENT
the
key . The hollow star “ ” changes to the filled star “ ” to indicate the alarm setting
is valid (or active).
4-12
Page 55

3) When the horizontal cursor is on an item which has the filled star mark “ ”, beside it, the
following sub-menu appears.
ALARM/ALARM ZONE SETTING KNOB SETUP
SELECT : SET ZONE STOP ALM
PRESS EVENT KEY TO ENTER
To make alarm setting valid;
1 Place the horizontal cursor on “SET ZONE” by knob, and press the
EVENT
alarm zone setting display appears.
EX. Selected “1ST LAYER” - “DIR
MAX
MIN
SET
1. 2kt
280°
LYR1 SPD
MIN 0.5kt
MAX 1.0kt
LYR1 DIR
MIN 45°
MAX 90°
”
MIN
MAX
2 As necessary, change alarm zone by (MAX) and (MIN), and then press the
key.
key . The
ENTER
To make alarm setting invalid;
1 In the alert message window, select “STOP ALM” by knob, and press the
key. The filled star “ ” aside the option item changes to the hollow star “ ” to show the
alarm setting is now invalid. (Alarm zone settings are preserved, but they do not trip the
alarm.)
4. After entering the alarm/alarm zone, press the
ALARM
key to store the settings and to close the
alarm menu window.
5. When the conditions of an alarm are breached, with ship’s movement or tide movement, the
alarm message starts blinking at the bottom part of the display. If the audible alarm is enabled
for that item, the alarm sounds.
¡ To cease the audible alarm, call the alarm menu and disable (OFF) the audible alarm
(
→ ), or make the alarm setting invalid (“ ” → “ ”.)
¡ To mute the audible alarm temporarily, turn the VOLUME control counter-clockwise.
EVENT
4-13
Page 56

Alarm Priority
Alarm priority is in the order as listed the Alarm menu.
ALARM SET
1ST LAYER
2ND LAYER
:
:
SHIP SPEED
TRIP
Highest priority
Lowest priority
If multiple alarm conditions are violated, alarm having the highest priority is presented as a visual
alarm at the bottom of the display.
There is no priority for the audible alarm; the alarm is released whenever an alarm parameter is
violated.
ALARM FOR TRIP DISTANCE AND TRIP TIME
Two basic functions are included in the alarm facility:
¡ Generates the alarm when preset trip time or trip distance is reached.
¡ Measures distance-run for a certain preset period, or to count time-elapsed to run a certain
preset distance.
Procedure
1. In the alarm menu, select “TRIP” item by the Knob.
A. To set a distance limit, turn
key. The following sub-window appears.
DISTANCE RUN ALARM
TRIP DIST
: 0. 1 NM
knob for “DIST ( )” option, and then hit the
KNOB ITEM
KNOB SETUP
EXEC : EVENT
EVENT
4-14
Page 57

Turn knob to set a distance-run, and then hit the
A filled star mark “
” appears aside “DIST” to show the distance alarm setting valid.
EVENT
key.
To start counting distance, press the
TRIP
key. Note that the alarm distance counting is
perfomed internally but not shown on the display . When the preset alarm distance is reached,
time-elapsed display becomes red and the counting is stopped. If the audible alarm is en-
abled (“
B. To set a trip alarm, turn
”), it is released.
knob for “TIME ” options and hit the
EVENT
key. The
following sub-window appears.
DISTANCE RUN ALARM
KNOB ITEM
KNOB SETUP
EXEC : EVENT
TRIP TIME
After selecting hour , minute and second by the knob, set your desired trip time (alarm limit) by
the
“TIME” to show the trip time alarm setting is valid.
knob. Then, press the
: 0
: 15
: 0
EVENT
HOUR
MINUTE
SECOND
key to store the setting. A filled star “ ” appears aside
To start counting trip time, press the
TRIP
key. Note that the trip time counting is preformed
internally , but not shown on the display. Instead, distance-run in the TRIP display frame counts up.
When the preset trip time is reached, the distance-run display becomes red and the counting is
shopped. If the audible alarm is enabled (“
”), it is released.
4-15
Page 58

Example A. Trip distance : 1 NM
Ship’s Movement
1 nm
(Alarm limit)
TRIP
Example B. Trip time : 1 hour
Ship’s Movement
Trip Time display
Trip
00 : 05 : 40
Trip time (time-elapsed) to run 1 nm
(Indication turns red and freezes.)
Trip
00 : 00 : 00
key pressed here.
Trip Distance display
1 hour
(Alarm limit)
TRIP
Trip
012NM
Distance-run taking 1 hour
(Indication turns red and freezes.)
Trip
000NM
key pressed here.
4-16
Page 59

CHAPTER 5. TROUBLESHOOTING
1. SELF-CHECK
The CI-35/35H has a self-test facility for general diagnosis of its major circuits. If an unusual
symptom is encountered during operation of the equipment, perform the self-check. If the self
check reveals equipment fault, shown by the error code, report the results to the service technician
when calling for service. (The user should not attempt further check inside the equipment.)
WARNING
Do not open the cover of
the equipment.
This equipment uses high
voltage electricity which can
shock, burn, or cause death.
Only qualified personnel
should work inside the
equipment.
Procedure
1. Call menu window by the pressing the
2. Select “MENU MODE” - “MENU 2” by the and knobs.
* MENU 2 *
Jan/15/1997
MENU MODE
REF DEPTH
BEAM TEST
SELF CHECK
DEMO DATA
TRIP RESET
DATE/TIME
MENU SELECT
: MENU1
: OFF
: OFF
: SINGLE
: OFF DP3. 4 LOG10
: RESET (0. 00)
: TIME DATE
: LOCK UNLOCK
MENU
key.
KNOB ITEM
MENU2
E/S
CONT1 PANEL ECHO
KNOB SETUP
END : MENU KEY
MENU3
MENU4
MENU SET
: FACTORY
5-1
Page 60

3. Place the item cursor on “SELF CHECK” by the knob, and then press the
MENU
this item is protected (locked), the following alert appears.
MENU SELECT IS LOCKED SET TO UNLOCK
UNLOCKED NO YES
PRESS EVENT KEY TO ENTER
EVENT
key. As
4. Select ‘YES’ by the knob and press the
EVENT
key . The color of “SELF CHECK” turns
green to show the item is unlocked.
5. Select a check option, SINGLE, CONTI, PANEL or ECHO by the
EVENT
key to start the self check.
key , and then press the
SINGLE (single cycle)
The SINGLE test executes the system check for one cycle displaying the test result for each item
checked. Items checked are ROM/RAM and P.C. boards for the Display unit and the Transceiver
unit. Echo strengths from three transducers are also displayed in the ECHO LEVEL frame.
ERROR
No. 002
104
SYSTEM CHECK
CI-3500
CI-3510
If abnormal, some error
number should remain.
See the table on
page 4-5 to identify
the cause of error.
CONTI (continuous: repeat)
The CONTI test executes the system check repeatedly. To escape, press the
key.
5-2
Page 61

PANEL
The PANEL test checks the front panel keys and controls for proper operation.
Press and release each key to see if it is making (1) and breaking (0) correctly. Also, turn
knobs to see if the step count changes from 0 to 63. (CW: count up, CCW: count down)
To terminate the PANEL test press the
MENU
key.
PANEL TEST
TIDE EFT
DRIFT
TIDE DIF
TRIP
MODE
ALARM
RANGE
MENU
0
0
0
0
0
0
0
0
EVENT
0
CRS PLOT
0
HISTORY
0
HU/NU
0
MAN TRK
0
LAYER 1
0
LAYER 2
0
LAYER 3
0
KNOB [ ] KNOB [ ]
and
04
END: MENU KEY
ECHO
The ECHO test displays echograms for three transducer beams. This lets the service technician
check the transmitter/receiver for proper operation.
The following key and knobs function to change receiving conditions.
KEY/KNOB FUNCTION
TRACK
MODE
To terminate the ‘ECHO’ check, press the
TVG setting ON/OFF
Depth range selection
Echo strength
(receiver gain)
MENU
key.
(The CI-35/35H restarts in the same condition as if it is switched on.)
5-3
Page 62

2. ERROR INDICATION
If the unit detects abnormal operation in the transceiver unit it displays a (blinking) message and a
three-digit error code and releases the audible alarm. (Error indication will not interrupt the operation of the equipment.)
The error codes and the corresponding status are tabulated below. If multiple items are in error;
only the latest error code appears.
EDOCRORRE)METIKCEHC(SUTATSRORRE
000
100
200
300
400
500
600
700
800
001
101
201
recudsnartdetaehrevO
.4UNEMniTXE
.egatlovtupnis’niamlamronbA
)B+(egatlovhgihXTlamronbA
1maebrofegatlovXTlamronbA
2maebrofegatlovXTlamronbA
3maebrofegatlovXTlamronbA
1maebroftnerrucXTlamronbA
2maebroftnerrucXTlamronbA
3maebroftnerrucXTlamronbA
-VANsi”DEEPSTW“etipsedgnissimsiatadnoitisoplanretxE
.4UNEMniL/Lsi”ATADVAN“dnaEDIT
-VANsi”DEEPSTW“etipsedgnissimsiataddeepslanretxE
.4UNEMniDPSsi”ATADVAN“dnaEDIT
ottessi”ATADEMIT“etipsedgnissimsiatademitlanretxE
5-4
301
401
501
601
002
102
202
302
.2UNEMni
.gnissimatadgnidaehlanretxE
.˚5nahterom
gnissimataderutarepmetretawlanretxE
ralugerrieslupgniyeklanretxE
tupnirosneserutarepmetlamronbA
retemonilcnimorflangis”llor“lamronbA
retemonilcnimorflangis”hctip“lamronbA
S/Eottessi”HTPEDFER“etipsedgnissimatadhtpedlanretxE
ybgniraebetulosbalanretnisreffidatad)esruoc(gniraeblanretxE
Page 63

3. Internal Battery
A battery fitted inside the display unit preserves data when the equipment is turned off, and its is
life is about five years. When its voltage is low no clock may display, etc. Contact your dealer to
request replacement of the battery.
emaNstraPepyT.oNedoC
yrettabmuihtiLK6RE199-021-000
5-5
Page 64

This page is intentionally left blank.
Page 65

SPECIFICATIONS
1. MEASURING RANGE
1) SHIP'S SPEED/COURSE
Speed: [Fore-aft] -10.0kts to +30.0kts
[Port-stbd] -9.9kts to +9.9kts
Direction: All directions in one degree steps (0° to 359°)
(relative and true bearing)
Speed Measurement Depth
(Ground tracking mode): 3 m to 500 m beneath the keel (depending on sea condition)
(Water tracking mode): 2 m to 25.6 m beneath the keel
(The measuring accuracy will drop for the depth shallower
than 40 m)70 m or deeper (with wide pulse)
2) TIDE SPEED/DIRECTION
Speed: 0.0 to 9.9 kts
Direction: All directions in one degree steps (0° to 359°)
(relative and true bearing)
No. of measuring layers: CI-35: 3 layers fixed
CI-35H: Maximum 11 layers (10 at constant interval between
maximum and minimum preset depths, and a layer
preset manually)
Tide measurement depth: 2 m to 200 m beneath the keel (depending on sea condition)
Clearance of more than 15m required for Ground Tracking
Mode, 40m required for Water Tracking Mode
Measuring Interval 0, 1, 3, 4 and 5 minutes
2. MEASUREMENTMODE
1) AUTOMATIC preset to Ground Tracking mode in measurable depth range,
and switched to Water Tracking mode out of measurable
range for Ground Tracking.
2) GROUND TRACKING fixed to Ground Tracking mode irrespective of depth
3) WATER TRACKING fixed to Water Tracking mode irrespective of depth
3. DISPLAY
1) DISPLAY DEVICE 12" high-resolution color CRT
AP-1
Page 66

2) TEXT DISPLAY ITEM (in table form)
Ship's real speed: xx.x(kt)
Ship's course: xxx(°) or 32-point notation
Tide speed: x.x(kt) (for 3 layers)
Tide direction: xxx (°) or 32-point notation (for 3 layers)
Depth of tide layer: xxx (m) (for 3 layers)
Total mileage: xxxxx. xxx (nm)
Present time: xx (h) xx (m) xx (s)
Ship's heading: xxx. x (°) (external data)
Optional text display (display on/off switchable)
Tide differential speed: x. x(Kt)
Tide differential
Direction: xxx (°) or 32- point notation
Lateral speed: xx. x(Kt)
Drift angle (leeway angle) xx(°)
Trip distance: xxxx. xx (nm) (one at a time)
Trip time: xx(h)xx(m)xx(s) (one at a time)
Water tracking speed: xx. x(kt)
Water tracking course: xxx(°) or 32-point notation
Optional text display (available when external data source is connected)
Water temperature: xx. x(°C)(Needs external temperature data)
3) GRAPHIC DISPLAY
Tide vector: Tide speed and direction for each layer are presented by
length and orientation of a radial vecor bar. Color of vector
bar represents layer. (North-up presentation selectable if
external heading input is available.)
Tide differential vector: Speed and direction of tide differential are presented by
length and orientation of a radial bar. Colors of vector bar
represent the layers involved.
Echo level: Variation of echo strength with depth is presented either in
color sounder mode or in A-scope mode.
(simultaneously for the three sounding beams)
Optional graphic display (display on/off switchable)
Course track plot: Ship's course track display consisting of the last 200 sam-
pling points is presented in ship-centered format. (Display
switchable on/off)
Tide history: Tide vectors recorded at last 24 sampling points are presented
on one screen. (24 hours max.)
Tide effect: Simulated movements of tide layers along the ship's track.
(Display switchable on/off)
Optional text display (available when external data source is connected.)
Water temperature: Water temperature graph covering the 17.5 minutes is dis-
played. (External temperature data input required.)
AP-2
Page 67

4. ACCURACY
1) SHIP SPEED ±1 % or ± 0.1 kt
2) TIDE SPEED ±2 % or ± 0.2 kt
3) DIRECTION ±3.5 °(depending on sea condition)
5. TRACKING SPEED
1) SHIP SPEED Less than 40 sec.
2) TIDE SPEED Less than 60 sec.
6. SOUNDING FREQUENCY
130kHz approx.
7. DATA INPUT
1) HEADING DATA Clocked-serial (AD100)..................................................1ch
2) KEYING PULSE (for interference rejection) Current loop signal ...............................2ch
3) MISCELLANEOUSSerial (IEC1162, equivallent to NMEA0183)..............................1ch
Heading; ($--HDT/HDM/HCD/HCC)
Depth; ($--DBS/DBT/DBK)
W-temp; ($--MTW)
Date/time; ($--ZDA/ZLZ/ZZU) --:any talker
8. DATA OUTPUT
1) LOG SIGNAL
200 pulses/nm Contact signal, forward only...........................................2ch
(contact rating 0.2A/30V max.)
400 pulses/nm TTL level, forward only..................................................1ch
2) EXTERNAL ALARM Contact rating 0.2A/30V)
Speaker output ................................................................1ch
(800mW into 4 to 8 ohms)
3) MISCELLANEOUS Serial (IEC1162, equivallent to NMEA0183).................1ch
Speed/course($VDVTG/VBW/VHW)
Set & drift ($VDVDR)
Tide spd/dir ($VDVCD)
Current ($VDCUR)
Serial (Furuno CI-7000 format) for data recording ........1ch
(Date/time,ship's speed/course, tide speeds/directions,water
AP-3
Page 68

4) ANALOG SHIP SPEED Current signal for Analog Display.
-3.33mA to 10.0mA/-10kt to 30kt
(Maximum load 400 ohms)
5) TRUE BEARING DATA Clocked-serial (Furuno AD-100 format) ........................1ch
9. MISCELLANEOUS FUNCTIONS
Self-check function,
Simple demonstration function
10. NAV-AIDED TIDE MEASUREMENT
Even where ground tracking is unattainable, absolute tide movements (tide on ground) can
be calculated by applying accurate position and heading data to CI-35/35H. This function
may be extremely useful for deep sea purse seining or oceanographic survey.
Note:1. Depths are measured below transducer surface.
2. The CI-35/35H uses an acoustic wave for speed measurements. Aeration due
to rapid accelera tion/deceleration, heavy engine/propeller vibration or
interference from other sounding equipments can degrade performance of
this equipment.
3. Tide speed measuremants are made by detecting echoes from underwater
microscopic objects like plankton. If density of microscopic objects
is too high or too low, depending on season or operating areas,
CI-35/35H may not provide normal measuring performance.
11. ENVIRONMENTAL CONDITIONS
1) Temperature: 0 to 45°C
2) Humidity: 80%RH (without condensation)
12. POWER SUPPLY
Main's input: 100/110/1 15/220/230VAC,50/60Hz,1ø
Power consumption: 100 - 240 VDC : 3.0 - 1.25 A
13. COATING COLOR
Display unit: Front panel; Munsell N1.5 Newtone NO.5 (not changed)
Cover plate; Munsell 2.5GY5/1.5(standard) or 2.5G7/2
Transceiver Unit: Munsell 2.5GY5/1.5(standard)or 2.5G7/2
Junction Box: Munsell 2.5G7/2 (not changed)
AP-4
Page 69

14. DISTRIBUTION BOX DS-370
1) Input Signal (TTL level)
Digital speed signal
Log signal (400p/nm)
Alarm signal
Power on/off signal
2) Output Signal
The following output boards are selective.
(7 boards max.)
(1) OTX board Serial Signal for DS-350/351 Digital Indicator
(2) ODD board BCD serial signal for MF11D (LCD spec. only),MF-22D,
DS-720/DS-370/DS-377 digital display.
(3) OAD board Analog current signal for Analog Display. (1 port /1 board),
-2.5mA to 10.0mA/-10kt to 40kt or -3.33mA to 10.0mA/-10kt
to 30kt
(4) OLG board For Distance Indicator (1 port /1 board) and 200/400 p/nm ,
signal, 30V/0.2A or RS-422 current loop signal)
(5) OAC board Ship's speed current voltage signal (1 port /1 board). Current
signal (4.0mA to 20.0mA/-10kt to max. speed, max. impedance: 250 ohms)
(6) OAV board Ship's speed voltage signal (1 port / 1 board). Voltage signal
(-2.50V to 10.0V/-10kt to 40kt, -3.33V to 10.0V/-10kt to
30kt, -4.00V to 10.0V/-10kt to 25kt, -5.00V to 10.0V/-10kt to
20kt, max. impedance: 1 kohm) + Fore aft status signal(RS422 current loop)
3) Power Supply and Power Consumption
100/110/115/220/230 VAC, 1ø, 50/60 Hz, 50 VA max.
AP-5
 Loading...
Loading...