


Operating
instructions
WF 25i LaserHybrid 10 kW
SB 360i LaserHybrid
ZH
操作说明书
42,0426,0279,ZH 017-06042022


目录
安全规范 6
安全标志说明 6
概要 6
预期用途 7
环境条件 7
运营公司的义务 7
人员的义务 7
个人保护装置 7
由有害气体和蒸汽造成的危险 8
逸出的保护气体产生的危险 8
火花飞溅带来的危险 8
焊接电流引起的危险 9
杂散焊接电流 9
EMC 措施 9
特殊危险区域 9
日常安全措施 10
安装位置的安全措施 11
正常操作中的安全措施 11
安全检查 11
改造 12
备件和易损件 12
校准电源 12
CE 标识 12
版权 12
ZH
一般信息 13
概述 15
概要 15
预期用途 15
应用领域 15
供货范围 15
可选组件 17
气体喷嘴交叉射流 17
要求 18
机械要求 18
机器人要求 18
接地 18
对准 19
系统概览 20
系统概览 20
其他 LaserHybrid 系统 21
设置变体 23
操作元件和接口 25
设备描述 27
产品描述 WF 25i LaserHybrid 10 kW 27
Crossjet 版本 29
产品描述 SB 360i LaserHybrid 29
碰撞保护 31
概要 31
安全 31
碰撞后检查参考点 31
信号分析 31
连接规格 32
连接规格 32
压缩空气图示 34
SplitBox SB 360i LaserHybrid 中的压力监控 35
3

调试 37
概述 39
安全 39
安装规定 39
电源连接 39
设置激光焊接系统 40
在机器人上安装激光焊接机头 41
机器人上的连接选项 41
将激光焊接机头安装在机器人上 42
安装和连接 SplitBox SB 360i LaserHybrid 43
将 SplitBox SB 360i LaserHybrid 安装至墙壁 43
连接 SplitBox SB 360i LaserHybrid 44
连接 Crossjet 47
连接 CrossJet 47
将 LaserHybrid 中继线连接到激光焊接机头 49
将 LaserHybrid 中继线连接到激光焊接机头 49
在激光焊接机头上连接/更换送丝管 50
安装/更换送丝轮 51
安装/更换送丝轮 51
连接 IPG 激光光学系统和附加抽排系统 52
连接 IPG 激光光学系统 52
连接 IPG 附加抽排系统 55
连接其他激光光学系统和附加抽排系统 57
连接其他激光光学系统 57
连接附加抽排系统 60
准备焊枪 63
可用焊枪 63
装备 MTB 500 LH 焊枪 63
装备 LH 360 焊枪 65
在机器人上安装中继线 67
在机器人上放置中继线 67
穿入填充焊丝 69
穿入焊丝 69
设置激光焊接机头 70
干伸长 70
可调轴 71
激光焊接机头上的调节设备 72
调节 x 轴 73
调节 y 轴 74
调节 z 轴 75
创建参考程序 76
安全 76
概要 76
创建参考程序 76
激光焊接的信号序列 78
安全 78
激光焊接的信号序列 78
开始焊接前的措施 80
开始焊接前的措施 80
激光焊接系统操作建议 81
激光焊接系统操作建议 81
压缩空气供应规范 81
维修 83
激光光学系统概述 85
IPG 激光光学系统 85
Trumpf、Precitec 和 Highyag 激光光学系统 86
更换焊枪和焊枪易损件 87
安全 87
焊枪备件 87
4

更换 MTB 500 LH 焊枪 88
更换 LH 360 焊枪 89
焊枪磨损件更换 90
更换防溅罩板和附加抽排 92
更换 IPG 防溅罩板 92
更换 IPG 附加抽排系统 92
更换其他激光光学系统的防溅罩板 93
更换其他激光光学系统的附加抽排系统 93
更换 IPG 激光光学系统 94
安全 94
准备工作 94
卸下 IPG 激光光学系统 96
安装 IPG 激光光学系统 97
检查/设置 IPG 激光光学系统的焦点 100
固定激光光学系统 103
最终任务 103
更换其他激光光学系统 105
安全 105
更换 Trumpf 激光光学系统 105
准备工作 105
卸下激光光学系统 108
插入激光光学系统 110
检查/设置激光光学系统的焦点 112
固定激光光学系统 114
最终任务 115
检查焊丝相对于激光焦点的位置 118
安全 118
概要 118
检查焊丝相对于激光焦点的位置 118
示例:焊枪更换后参考程序的应用 119
减少光学污染的措施 120
减少光学污染的措施 120
ZH
附录 121
技术数据 123
WF 25i LaserHybrid 10 kW(激光焊接机头) 123
LaserHybrid 中继线 MHP 360i LH 123
SB 360i LH 124
MTB 500i LH /W 124
5

安全规范
安全标志说明
警告!
表示存在直接危险。
若不予以避免,将导致死亡或严重的人身伤害。
▶
危险!
表示存在潜在危险的情况。
若不予以避免,可能会导致死亡或严重的人身伤害。
▶
小心!
表示可能导致财产损失或人身伤害的情况。
若不予以避免,可能会导致轻微的人身伤害和/或财产损失。
▶
注意!
表示可能会导致不良后果及设备损坏。
概要 激光复合焊接系统核心部件采用尖端技术制造而成,符合公认安全标准。任何方式的操作
或使用不当,均可能导致
-
操作人员/第三方受伤或死亡,
-
激光复合焊接系统核心部件损坏以及运营公司的其它物资损失,
-
激光复合焊接系统核心部件的运行效率低下。
所有调试、操作、维修和保养激光复合焊接系统核心部件的人员必须
-
具备适当的资格,
-
掌握焊接知识且
-
已认真阅读并遵守这些操作说明书和以下系统组件的操作说明书:
激光
激光光学系统
电源和相关的送丝机
机器人及其控制器
无论何时使用激光复合焊接系统核心部件,均须随身携带操作说明书。除此之外,还必须
遵守与事故预防和环境保护相关的所有适用的当地规则和法规。
激光复合焊接系统核心部件上的所有安全提示和警告标志必须:
-
清晰可读
-
完好无损/无标记
-
不得被移除
-
不得被覆盖、粘贴或刷涂。
有关激光复合焊接系统核心部件上安全和危险警告牌的位置,请参阅设备操作说明书中标
题为“概要”的章节。
启动激光复合焊接系统核心部件前,请排除可能降低安全性的所有故障。
这关乎您的人身安全!
6

预期用途 激光复合焊接系统核心部件只能用于其预期用途。
激光复合焊接系统核心部件仅用于铝、CrNi 和钢材的 激光焊接,
任何其他用途均属不当用途。
对于不当使用所导致的任何损失,制造商概不负责。
正当使用的要求还包括:
-
完整阅读并遵守操作说明书中的所有说明
-
完整阅读并遵守所有安全提示及危险标识
-
执行所有指定的检查和保养作业。
切勿使用激光复合焊接系统核心部件或电源来解冻管道。
激光复合焊接系统核心部件专为工业及商业领域而设计。对于在居住区中使用而造成的任
何损失,制造商概不负责。
对于使用错误或使用不当造成的后果,制造商也不承担任何责任。
环境条件 在规定区域之外操作或储存激光复合焊接系统核心部件属于违反指定用途行为。对于不当
使用所导致的任何损失,制造商概不负责。
环境空气温度范围:
-
操作期间:-10°C 至 +40°C(14°F 至 104°F)
-
运输和储存期间:-25°C 至 +55°C(-13°F 至 131°F)
相对湿度:
-
40°C (104°F) 时最高 50%
-
20°C (68°F) 时最高 90%
ZH
环境空气:不存在灰尘、酸性物质、腐蚀气体或物质等
海拔高度:最高 2000 m (6561 ft. 8.16 in.)
运营公司的义务 运营公司只能允许以下人员使用激光复合焊接系统核心部件
-
熟悉基本的职业安全和事故防范规定,并接受过激光复合焊接系统核心部件操作培训
-
已阅读并理解本操作说明书,尤其是“安全规程”部分,并已签字确认
-
根据作业结果的要求接受过培训。
必须定期检查人员的安全作业意识。
人员的义务 开始作业之前,所有被指定操作激光复合焊接系统核心部件的人员都必须做到以下几点:
-
遵守事故预防和安全规程的基本规定
-
阅读这些操作说明书,尤其是“安全规程”部分,并签字确认他们已完全理解并将遵
守这些规定
在离开工作场所之前,请确保在无人值守的情况下不会造成人身伤害或财产损失。
个人保护装置 为了您的人身安全,请采取以下预防措施:
在密闭环境中使用 激光焊接工艺焊接的人员必须
7

-
穿着硬质防湿鞋
-
佩戴适当的手套(具有电气绝缘和热保护功能)保护双手
-
佩戴符合法规要求的激光防护眼镜,以保护眼部免受激光束伤害。为保护脸部和眼部
免受紫外线伤害,还必须在激光防护眼镜和人脸前面使用防护面罩进一步防护,面罩
需配有符合规定的 4 级激光防护滤镜。即使配有符合规定的 4 级激光防护滤镜,也不
要直视激光束。
-
身上仅穿着合适的(阻燃)服装
-
穿戴为交叉喷气噪音 (120 dbA) 设计的听力保护装置
如果有人在密闭环境中使用 激光焊接工艺作业,
-
告知他们操作过程中可能产生的所有危险(例如,对健康有害的潜在气体累积、由于
可呼吸空气中氧气不足而造成窒息的危险、激光造成的危害等)
-
提供个人保护装置
-
建造防护墙或安装防护帘。
由有害气体和蒸汽
造成的危险
焊接期间产生的烟尘含有有害气体和蒸汽。
焊接烟尘包含在某些情况下可能导致先天缺陷和癌症的物质。
让您的头部远离焊接烟尘和气体。
针对烟尘和有害气体采取以下预防措施:
-
切勿吸入烟尘和有害气体。
-
使用适当的装置将烟尘和有害气体从工作区域中排出。
确保通入充足的新鲜空气。
如果通风不足,应使用通气设备进行空气供给。
如果未进行焊接操作,请关闭保护气体气瓶阀或主供气源。
如果对抽吸功率是否足够存有任何疑问,应将测得的有害物质排放值与允许的极限值进行
比较。
以下组成部分是确定焊接烟尘毒性的主要因素:
-
用于工件的金属
-
电极
-
药皮
-
清洁剂、脱脂剂等
有关上面列出的组成部分,请查阅相应材料安全数据表和制造商说明书。
将易燃蒸汽(例如溶剂蒸气)置于激光和电弧辐射范围之外。
逸
出的保护气体产
生的危险
火花飞溅带来的危险火花飞溅会引起火灾和爆炸。
8
保护气体不受控制的逸出所产生的窒息风险
保护气体无色无味,泄漏时可使周围环境缺少氧气。
-
确保至少按照 20 立方米/小时的通风量供应充足的新鲜空气。
-
遵守保护气体气瓶或主供气源上的安全和维修提示。
-
如果未进行焊接操作,请关闭保护气体气瓶阀或主供气源。
-
每次启动前都应检查保护气体气瓶或主供气源是否存在不受控制的气体泄漏。
切勿在易燃材料附近进行焊接。
易燃材料必须与 激光焊接作业地点至少保持 11 m (35 ft) 的距离,或使用经认证的防护罩
进行保护。

现场必须备有适当且经过测试的灭火器。
火花和热金属部件也可能通过小裂缝和开口落入周围区域。采取适当措施以确保不存在人
身伤害或火灾危险。
请勿在存在火灾和爆炸危险的区域进行焊接,也不要在不符合相应国家/地区及国际标准的
密封罐、滚筒或管道上进行焊接。
请勿在储存有气体、燃料、矿物油及类似物的容器上进行焊接。残留物存在爆炸危险。
焊接电流引起的危险电击可能致命。每次电击都有死亡危险。
所有焊接用输电线必须可靠固定,无破损且绝缘。立即更换松动的连接和烧焦的电缆。
杂散焊接电流 如果未遵循以下说明,则可能会产生杂散焊接电流,进而导致保护接地线、所用电源、激
光复合焊接系统核心部件和其他电气设备损坏。
确保工件连接端子牢固连接至工件。如果地板具有传导性,则电源需安放在尽可能使其绝
缘的位置。
EMC 措施 警告!电磁场! 电磁场可能会引起未知的健康问题。
ZH
操作员负责确保电气和电子设备不会受到电磁干扰。
如果发现电磁干扰,则操作员须采取适当措施来整顿这种局面。
根据国家及国际规定,检查和评估附近装置可能存在的问题及其抗干扰度:
-
安全装置
-
输电线、信号线和数据传输线
-
EMC 及电信装置
-
测量及校准设备
-
心脏起搏器使用者、助听器使用者等在靠近设备时会对健康产生不良影响
心脏起搏器使用者在靠近焊接作业区前必须征求医生的意见。
避免 EMC 问题的支持性措施:
a)电网电源
-
若在电源连接符合相关规定的情况下仍发生了电磁干扰,则应采取一些附加措施
(例如使用适当的电网滤波器)。
b)焊接用输电线
-
使用尽可能短的控制线
-
布设时应使控制线彼此靠近(这样做还可同时避免 EMC 问题)
-
布设时应使控制线远离其他类型的线路
c)电位均衡
d)工件接地
-
如有必要,可使用合适的电容器建立接地连接
e)可根据需要采取屏蔽措施
-
屏蔽附近的其他设备
-
遮蔽整个焊接装置
特殊
危险区域 激光束有伤及眼部的危险。除了将防护罩与符合规定的紫外线滤光镜搭配使用外,还应使
用符合规定的激光防护眼镜保护眼部免受激光束伤害。但仍须确保相关人员不会意外看到
激光束。
9

如果工件表面特别明亮或具有高反射率,则反射的激光散射辐射会带来进一步的风险。采
取适当的预防措施,以使在场人员得到充分保护,免受激光散射辐射的影响。
请保持手、头发、宽松衣物和工具远离运转中的装备组件,例如:
-
通风装置
-
齿轮
-
滚轮
-
轴
-
焊丝盘和焊丝
请勿将身体部位伸入旋转中的送丝驱动器齿轮或驱动部件中。
防护罩和侧面零件只有在保养和维修作业期间才能开启/拆下。
操作期间:
-
请确保关闭所有防护罩且已安装好所有侧面部件。
-
使所有防护罩和侧面零件保持关闭状态。
从焊枪中伸出的焊丝极有可能造成人身伤害(划伤手部、面部、眼部等)。
因此,请务必使焊枪(带有送丝机的设备)远离身体并佩戴合适的护目镜。
焊接期间或焊接完成后,请勿触摸工件 - 存在灼伤风险。
焊渣可能从正在冷却的工件上飞出。为此,即使在重新处理工件时,也请务必佩戴符合规
定的保护装置,并确保不会对他人造成危险。
在操作焊枪和其他工作温度较高的装备组件前,需进行冷却。
对于存在火灾或爆炸危险的区域,应采用特殊规程
- 遵守相关的国家/地区及国际规定。
存在较大电气危险性空间(例如锅炉房)配备的电源必须标有(安全)标志。但电源不应
放置于此类空间。
冷却剂泄漏时存在烫伤风险。在断开冷却剂供应接口软管的连接或回流连接之前,请关闭
冷却器。
在处理冷却剂时,请观察冷却剂安全数据表上的信息。冷却剂安全数据表可通过服务中心
或制造商网站获取。
通过起重机运输这些装置时,只能使用制造商提供的合适承载装置。
-
将链条或绳索连接到合适承载装置上的所有指定悬挂点。
-
链条或绳索必须尽可能接近垂直。
-
拆除气瓶和送丝机(MIG/MAG 和 TIG 设备)。
始终使用起重机上合适的绝缘送丝机悬挂设备来吊装送丝机(MIG/MAG 和 TIG 设备)。
如果设备配备了输送带或手柄,则该设备将专用于手动输送。输送带不适用于起重机、平
衡重叉车或其他机械起重工具的输送。
必须定期检查与设备或其部件连接的所有起重装备(如皮带、带子、链条等)的情况(例
如,是否存在机械损坏、腐蚀,或由其他环境影响引起的变化)。
测试间隔与测试范围必须至少符合各自适用的国家标准和准则。
如果保护气体接口采用了转接头,则无色、无味的保护气体可能会在不知不觉中泄漏。安
装前请使用合适的铁氟龙胶带密封设备保护气体接口转接头上的螺纹。
日常
安全措施 无论何时使用激光复合焊接系统核心部件,均须随身携带操作说明书。
除此之外,还必须公示和遵守与事故预防和环境保护相关的所有适用的当地规则和法规。
激光复合焊接系统核心部件上的所有安全和危险提示必须保持清晰易读。
10

安装位置的安全措施激光焊接工艺的操作间必须满足以下要求:
-
相对于周围房间要防光
-
至少用 1 mm 的钢板和/或经核准的激光保护玻璃屏蔽,以抵御紫外线和激光束危害
-
操作间打开后,激光焊接工艺和电弧焊接工艺必须立即自动停止。
设备倾翻可致人死亡!将设备牢固地安置在平坦的坚硬表面上
-
倾角不能超过 10°
对存在火灾或爆炸危险的区域适用的特殊规定
-
遵守相应的国家和国际法规。
按照公司内部说明和检查流程确保工作场所附近区域始终保持清洁有序。
只能安装和操作防护等级符合功率铭牌所示要求的设备。
安装设备时,应确保留有 0.5 m (1 ft. 7.69 in.) 的周围间距,以保证冷却空气的自由流通。
在运输设备时,请务必遵守适用的国家及地区准则以及事故防范规定,尤其是与运输和装
运期间所涉危险相关的准则。
运输设备前,请务必完全排空冷却剂并拆下以下部件:
-
送丝机
-
焊丝盘
-
保护气体气瓶
在运输之后但尚未调试之前,必须对设备进行目视检查,以确定其损坏情况。在调试设备
之前,必须由经培训的技术服务人员对所有损坏部位进行维修。
ZH
正常
操作中的安全
措施
安全检查 每次改装、安装或改造以及所有维修和保养之后,至少每 12 个月,操作员必须让电工对
仅当所有防护和安全装置功能完备时才能操作激光复合焊接系统核心部件。如果有任何安
全装置无法正常工作,则将产生以下风险
-
操作人员/第三方受伤或死亡,
-
设备损坏以及运营公司的其它物资损失,
-
设备工作效率低下。
在启动设备之前,必须先对无法正常运行的安全装置进行维修。
切勿略过或禁用安全装置。
启动激光复合焊接系统核心部件之前,需确保不会对他人造成危险。
激光复合焊接系统核心部件必须至少每周检查一次,确定安全装置是否存在可从外部检测
到的损坏以及功能是否正常。
激光复合焊接系统核心部件进行测试,以确保其正常工作。
规定 标题
IEC (EN) 60 974-1 电弧焊设备第 1 部分:焊接电流源
BGV A2 第 5 节 电气装置和设备
BGV D1 第 33/49 节 焊接、切割及相关工作方法
VDE 0701-1 维修、改造和测试电气设备;
常规要求
VDE 0702-1 重复测试电气设备
11

改造 未经制造商允许,切勿擅自改装、安装或改造激光复合焊接系统核心部件。
必须立即更换状况不佳的零件。
备件和易损件 只能使用原装备件和易损件(此要求同样适用于标准件)。
无法保证外购件在设计和制造上均符合对其所提出的要求,也无法保证其能够符合安全要
求。
订购时,请根据备件清单指定设备的准确名称、部件编号以及序列号。
校准电源 需根据国际标准定期校准电源。制造商建议校准间隔为 12 个月。如需更多详细信息,请
联系您的服务中心。
CE 标识 激光复合焊接系统核心部件满足低电压和电磁兼容性指令的基本要求,因此具有 CE 标
识。
版权 该操作说明书的版权归制造商所有。
文字和插图在操作说明书付印时符合当时的技术水平。生产商保留更改权。本操作说明书
的内容不构成顾客的任何权利。我们非常欢迎有关操作说明书的改进建议以及对其中错误
的提示。
12

一般信息
13

14

概述
概要 激光焊接机头将激光束的优点与 MIG/MAG
焊接工艺的优点相结合。
对于 激光焊接工艺,这意味着高熔深、狭
窄的热影响区、填充金属和出色的间隙桥接
能力。
激光焊接机头的其他优点:
-
焊接速度快,性价比高
-
过程稳定性好,同时废品率和返工率低
-
优质焊缝
-
热输入低,变形小
-
焊接系统可用性高,易损件使用寿命长
-
使用灵活
-
间隙公差大
-
适用于光纤、磁盘和二极管激光器。
ZH
预期用
途 WF 25i LaserHybrid 10 kW 专为与伏能士系统组件相关的自动 MIG/MAG 焊接工艺而设
计。
任何其他用途均属不当用途。
对于不当使用所导致的任何损失,制造商概不负责。
正当使用的要求还包括:
-
遵守这些操作说明书中有关各个组件的所有说明
-
执行所有指定的检查和保养作业
在这些操作说明书的其余部分,WF 25i LaserHybrid 10 kW 将被称为“激光焊接机头”。
应用领域 WF 25i LaserHybrid 10 kW 焊接机头用于以下场合:
-
在汽车行业的车轴和车身制造中,制造厚度为 1-4 mm 的薄板
-
在铁路车辆制造业中,用于焊接长焊缝和搭接接头
-
在造船业中,用于对接焊缝
-
在汽车制造业中,用于焊接搭接接头和轮辋
-
在金属容器制造中,用于焊接搭接接头、环焊缝和对接焊缝
-
用于起重机上的角接头
供货范围 激光焊接机头的供货范围包括以下部件:
15

-
1 个激光焊接机头 WF 25i LaserHybrid 10 kW(整装)
-
1 条 LaserHybrid 中继线
-
1 个干伸长测量量具
-
1 个量程高达 25 l/min 的流量计
-
1 本操作说明书
-
工具和送丝机附件,具体取决于配置
工具和送丝机附件:
数量 名称
1 定位销的拉拔工具
44,0450,1223
1 用于确定焦点位置的测量量具
42,0201,1216
1 干伸长测量量具
42,0201,1742
1 内六角扳手尺寸 6 mm(用于调整支撑单元上的位置)
42,0435,0001
1 内六角扳手尺寸 5 mm(用于调整支撑单元上的位置)
42,0410,0014
1 内六角扳手尺寸 4 mm(用于调整支撑单元上的位置)
42,0410,0013
1 内六角扳手尺寸 3 mm(用于固定抽排软管)
42,0410,0012
1 内六角扳手尺寸 2.5mm(用于调节激光光学系统)
42,0435,0002
1 用于导丝管的修整工具
42,0001,4936
1 用于焊枪接头和中继线接头的叉形扳手
45,0200,1404
1 扁平叉形扳手尺寸 12 mm
42,0410,0007
1 扁平叉形扳手尺寸 8/10 mm
42,0410,0004
1 驱动轮扳手
42,0200,9344
16

可选组件 可用的激光光学系统:
-
IPG FLW-D50-S-V
-
TrumpfBEO D70
-
Precitec YW52
-
Highyag BIMO
WF 25i LaserHybrid 10kW 激光焊接机头可选配以下组件:
-
焦点监控器
-
温度传感器
-
Crossjet 压力传感器
-
吸入软管组
-
安装板 17.5 mm
-
Crossjet 气体喷嘴
-
焊枪 MTB 500 LH / W / 0°/ L228
-
焊枪 MTB 500 LH/W/0°/L284
气体喷嘴交叉射流 在焊接期间,根据能量密度和材料,激光会触发高度可变的等离子体光斑,从而吸收激
光。
在恒定的激光输出下,会产生不同的熔深。
为了确保尽管有等离子体光斑,仍能保持恒定的熔深,可以使用气体喷嘴交叉射流。
气体喷嘴交叉射流使用压缩空气来产生细微的气流,该气流会在特定高度切断等离子体光
斑。
ZH
重要!
-
由于气体喷嘴交叉射流非常靠近气体出口的开口,因此会导致气体回旋,进而导致细
孔。
-
此外,如果气流遇到阻力,则可能导致形成尖锐细孔。
-
等离子体光斑包含焊接飞溅物和焊接烟尘。如果吹出等离子体光斑,则周围区域将受
到严重污染。
适用范围:
-
用于容易吹到的部件
-
用于至少 4 kW 的激光输出
-
主要用于具有完全熔深打底焊道或要求精确焊接熔深的对接焊缝
17

要求
-
-
机械要求 为确保稳定且具有可重复性的 激光焊接工艺,必须满足以下机械要求:
-
对机器人或专用机器(例如纵向行走机构)的精确焊枪导向
-
精确的焊缝制备
-
低部件公差
-
精确、快速且偏差极小的焊缝管理系统
机器人要求 激光焊接机头重约 19 kg。光学元件重约 3 kg。装有光学元件和中继线的完整激光焊接机
头的总重量应约为 30 kg,
因此机器人轴必须能够在指定的加速度下安全地移动 30 kg 的重量。
重要!根据激光光学系统的用途,激光焊接机头的最大允许加速度在 5–150 Hz 时为 3g。
接地
带双线绕组的接地电缆
接地电缆盘绕
18

对准
y
5°
示例:焊枪倾角前倾 5°
小心!
直接反射到激光光学系统中的激光辐射有严
重损坏的危险!
这可能会严重损坏光纤。
对准激光复合焊接系统核心部件时,始
▶
终避免与工件表面成 90°角。
ZH
19

系统概览
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(11)
(10)
(8)
(9)
(12)
系统概览 在机器人上安装有 SplitBox SB 360i LaserHybrid 的 LaserHybrid 系统
(1) 焊丝卷筒*
(2) 退绕送丝机:
WF 25i REEL 4R
+ OPT/i WF 焊丝矫直机 (4,100,880,CK)
+ WF 安装卷筒
(3) 退绕送丝机控制线
(4) 遥控器
(5) 电源 TPS 500i
+机器人接口**
+冷却器 CU 1400i Pro MC 或 CU 2000i MC Single
+立式支架(已拧紧)
(6) 送丝管
(7) 中继线
(8) 机器人
(9) SplitBox SB 360i LaserHybrid
(10) LaserHybrid 中继线
(11) WF 25i LaserHybrid 10 kW
(12) LaserHybrid 清洁站
20
* 作为焊丝卷筒的替代方案,也可通过焊丝盘进行送丝。
为此需要以下组件:
退绕送丝机 WF 25i REEL 4R
+ OPT/i WF 卷取设备行走机构 D300
** 例如:RI FB Inside/i 或 RI FB Pro/i

其他 LaserHybrid
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(11)
(10)
(8)
(9)
(12)
系统
在壁上安装有 SplitBox SB 360i LaserHybrid 的 LaserHybrid 系统
(1) 焊丝卷筒
(2) 退绕送丝机:
WF 25i REEL 4R
+ OPT / i WF 焊丝矫直机 (4,100,880,CK)
+ WF 安装壁
(3) 退绕送丝机控制线
(4) 遥控器
(5) 电源 TPS 500i
+ 机器人接口
+ 冷却器 CU 1400i Pro MC 或 CU 2000i MC Single
+ 立式支架(已拧紧)
(6) 送丝管
(7) 中继线
(8) 机器人
(9) SplitBox SB 360i LaserHybrid
(10) LaserHybrid 中继线
(11) WF 25i LaserHybrid 10 kW
(12) LaserHybrid 清洁站
ZH
21

电源上安装有 SplitBox SB 360i LaserHybrid 的 LaserHybrid 系统
(5)
(6)
(2)
(1)
(3)
(8)
(10)
(7)
(9)
(4)
(11)
(1) 遥控器
(2) 退绕送丝机控制线
(3) 电源 TPS 500i
+ 机器人接口
+ 冷却器 CU 1400i Pro MC 或 CU 2000i MC Single
+ 立式支架(拧紧)
+ 中继线
(4) SplitBox SB 360i LaserHybrid
(5) D300 焊丝盘
(6) 退绕送丝机:
WF 25i REEL 4R
+ OPT/i WF 卷取设备行走机构 D300
(7) LaserHybrid 中继线
(8) 送丝管
(9) 机器人
(10) WF 25i LaserHybrid 10 kW
(11) LaserHybrid 清洁站
22

设置变体
电源位于焊接室 (I)
-
TPS 500i – 电源
-
HP 95i CON W / 1.2 m / 95 mm² – 中继线
-
SB 360i LaserHybrid – SplitBox,安装在电源上
-
MHP 360i LH/W/FSC/FW 7.5m – LaserHybrid 中继线
-
焊丝卷筒
-
WF 25i REEL 4R – 送丝机卷取设备
-
WF 安装卷筒
-
送丝管 L = 10 m
-
激光焊接机头
应用领域:
机器人仅进行较小的补偿运动。
机器人轴 7 和 8 执行大部分的焊接进给运动。
示例:
锅炉、车轴等的环焊缝
电源位于焊接室 (II)
-
TPS 500i – 电源
-
HP 95i CON W / 1.2 m / 95 mm² – 中继线
-
SB 360i LaserHybrid – SplitBox,安装在电源上
-
MHP 360i LH/W/FSC/FW 7.5m – LaserHybrid 中继线
-
焊丝盘
-
WF 25i REEL 4R – 送丝机卷取设备
-
WF 卷取设备行走机构 D300
-
送丝管 L = 10 m
-
激光焊接机头
ZH
应用领域:
仅用于测试系统(批量生产中没有焊丝盘)
电源不在焊接室 (I)
-
TPS 500i – 电源
-
HP 95i CON W / 10 m / 95 mm² – 中继线
-
SB 360i LaserHybrid – SplitBox,安装在机器人或墙壁上
-
MHP 360i LH/W/FSC/FW 4.2m – LaserHybrid 中继线
-
焊丝卷筒
-
WF 25i REEL 4R – 送丝机卷取设备
-
WF 安装卷筒
-
送丝管 L = 20 m
-
激光焊接机头
应用领域:
机器人轴 1-6 进行焊接进给运动。
示例:
锅炉、蓄电池托盘等的长焊缝
23

电源不在焊接室中 (II)
-
TPS 500i – 电源
-
HP 95i CON W / 10 m / 95 mm² – 中继线
-
SB 360i LaserHybrid – SplitBox,安装在墙上
-
MHP 360i LH/W/FSC/FW 7.5m – LaserHybrid 中继线
-
焊丝卷筒
-
WF 25i REEL 4R – 送丝机卷取设备
-
WF 安装卷筒
-
送丝管 L = 20 m
-
激光焊接机头
应用领域:
机器人轴 1-6 进行焊接进给运动。
示例:
锅炉、蓄电池托盘等的长焊缝
电源在龙门架上并可移动
-
TPS 500i – 电源
-
HP 95i CON W / 10 m / 95 mm² – 中继线
-
SB 360i LaserHybrid – SplitBox,安装在龙门上
-
MHP 360i LH/W/FSC/FW 4.2 m 或 7.5m – LaserHybrid 中继线
-
焊丝卷筒
-
WF 25i REEL 4R – 送丝机卷取设备
-
WF 安装卷筒
-
送丝管 L = 20 m
-
激光焊接机头
应用领域:
机器人轴 1–8 进行焊接进给运动。
示例:
轨道车辆建造、大型基架(例如折弯机)中的长焊缝等
24

操作元件和接口
25

26

设备描述
(1)
(2)
(13)
(4)
(7)
(10)
(8)
(9)
(12)
(11)
(2)
(3)
(3)
(6)
(5)
(21)
(20)
(19)
(18)
(17)
(16)
(15)
(14)
产品描述 WF 25i
LaserHybrid 10
kW
ZH
项目 名称
(1) Crossjet 废气
(必须连接到抽排系统)
(2) Crossjet 供应
(3) 用于可选压力监控的连接
对于可选的压力监控,需要带有附加数据线的 LaserHybrid 中继线。
在 SplitBox SB 360i LaserHybrid 中进行激光焊接机头和 LaserHybrid 中继线的
压力监控(参见第 35 页)。
(4) 径向气流供应
(5) Crossjet 气体喷嘴供应
(6) 光纤电缆
(7) LaserHybrid 中继线连接
(8) 控制箱
(9) 驱动装置盖
27

(10) 气体检测键
回丝键 *
穿丝键 *
*
回丝键和穿丝键位于激光焊接机头的另一侧。
(11) 安装板
厚度 21mm 或 17.5mm,视应用而定
(12) LaserHybrid 焊枪
(13) Crossjet 气体喷嘴(可选)
(14) 气体喷嘴
(15) 机器人支座
(16) 机器人连接支架
(17) 激光光学系统
(18) 附加抽排系统
(19) 激光光学系统水冷连接
(20) 径向气流连接
(21) Crossjet
28

Crossjet 版本 Crossjet 有 2 个版本:
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(14)
(13)
(12)
(11)
(9)
(8)
(10)
方形设计 圆形设计
两种版本的功能和组装都相同。
产品描述 SB 360i
LaserHybrid
ZH
背面
项目 名称
(1) (+) 带有细牙螺纹的电流插口
用于连接中继线内的电力电缆
(2) 保护气体接口
(3) SpeedNet 接口
用于连接中继线内的 SpeedNet 电缆
(4) SpeedNet 接口
用于连接系统附加组件 - 如遥控器
(5) 气体吹扫接口
(6) 焊枪冷却接口 - 冷却剂回流接口 (红色)
(7) 焊枪冷却接口 - 冷却剂供应接口(蓝色)
用于连接中继线内的冷却剂回流软管
用于连接中继线内的冷却剂供应软管
正面
29

(8) SplitBox SB 360i LaserHybrid 固定架
(9) 焊枪接口 (FSC)
用于连接 LaserHybrid 中继线
(10) Crossjet OUT 接口
(11) Crossjet OUT 接口
(12) Crossjet IN 接口
(13) 将中继线敷设至电源
最初不包含在 SB 300i LaserHybrid 中;在将中继线安装到 SB 300i LaserHybrid
中时使用。
(14) 焊枪冷却终端连接器
用于将焊枪冷却系统连接到 LaserHybrid 中继线
30

碰撞保护
概要 激光焊接机头配有碰撞保护装置,以保护 LaserHybrid 焊枪和整个激光焊接机头。
碰撞保护基于浮动接触原理。将焊枪移动一定距离会断开机器人控制单元的两个输入之间
的电路(环线)。
环形干线从激光焊接机头穿过 LaserHybrid 中继线,一直到 SplitBox SB 360i
LaserHybrid,再从那里一直到电源上使用的机器人接口的连接。
ZH
安全
碰撞保护及其数字分析不能替代机电急停保护装置。
▶
碰撞后检查参考点 重要!碰撞后,请按照以下步骤检查参考点:
详细信息请参见第 118 页。
信号分析 碰撞保护发出的信号通过机器人接口发送到机器人控制单元。
如果发生碰撞,环形干线将断开,信号级别将下降。机器人控制单元必须执行以下程序序
列:
-
-
危险!
就像碰撞保护一样,急停保护装置也必须关闭电弧焊接作业和激光作业。
根据应用和设计,在 LaserHybrid 焊枪上设置 14/20mm 的干伸长
1
移至参考点
2
使用测量量具检查焊丝在 x/y/z 方向上相对于焦点的位置
3
立即停止激光和电弧焊接工艺
立即停止机器人运动
31

连接规格
(1)
(2)
(7)
(3)
(6)
(2)
(5)
(4)
(10)
(9)
(8)
连接规格
项目号 名称
(1) Crossjet 抽排系统连接
用于根据以下数据连接软管:
-
内径 Di = 51 mm
-
外径 Do = 57 mm
-
最大长度 = 10 m
(2) Crossjet 供应
用于根据以下数据连接软管:
-
内径 Di = 12 mm
-
外径 Do = 14 mm
-
p = 6 bar
-
所需填注功率 = 6 bar - 1500 l/min
-
所需抽吸功率 280 m³/h
(3) 径向供气
用于根据以下数据连接软管:
-
外径 Do = 6 mm
软管连接了径向供气 (3) 与径向空气接口 (10)。
32

(4) Crossjet 气体喷嘴供应
用于根据以下数据连接软管:
-
外径 Do = 4 mm
软管连接了 Crossjet 气体喷嘴供应 (4) 与 Crossjet 气体喷嘴 (7)。
(5) 激光光缆
弯曲半径 > 200 mm
(6) LaserHybrid 中继线连接
MHP 360i LH/W/FSC/4.2 m
MHP 360i LH/W/FSC/7.5 m
(7) Crossjet 气体喷嘴
(8) 附加抽排系统连接
用于根据以下数据连接软管:
-
内径 Di = 41 mm
-
最大长度 = 10 m
-
推荐抽排系统装置:
最小风扇功率 = 100 m³/h
最小负压 = 20,000 Pa
(9) 激光光学水冷接口
ZH
(10) 径向气流连接
注意!
焊枪和气体喷嘴也经过电源冷却器冷却。
光学冷却由激光冷却器执行冷却。
在任何情况下都不应使用电源冷却器冷却激光光学系统。
▶
33

压缩空气图示 MHP LH = LaserHybrid 中继线
WF 25i LaserHybrid 10 kWSB 360i LaserHybrid
MHP LH
(1)
(2)
(3) (4)
(5)
(6)
(7)
(8)
(5)
(4)
(6)
(9)
(7)
(8)
(7)
(4)
项目 名称
(1) 压缩空气供应已中断
最小值 6 bar
(2) 电磁阀
(3) 内压测量
(4) 压力测量选项
(5) 径向气流分支
(6) Crossjet 气体喷嘴分支
(7) Crossjet 空气供应管线连接
(8) Crossjet 废气
(9) 抽排
注意!
用于控制电磁阀 (2) 的“ VALVE On”(开阀)信号在位 26(远离 0)上传输。
34

SplitBox SB 360i
LaserHybrid 中的
压力监控
在电磁阀之后测量压力。
如果压力低于 4.5 bar 超过 2 秒钟,则撤消 Powersource Ready(电源就绪)位,并输出
警告代码 16835(激光 Crossjet 气压供应低)。
从电源软件版本 2.4.0 起:
如果压力低于 4.5 bar 超过 2 秒钟,则会设置“Warning-Bit”(警告位),并输出故障代
码 16835(激光 Crossjet 气压供应不足)。
当前的 Crossjet 压力显示在 SmartManager(电源网站)的“实际系统数据”下。
ZH
35

36

调试
37

38

概述
ZH
安全
工作不当可能会造成严重的人身伤害和财产损失。
▶
▶
安装规定 电源已根据防护等级 IP 23 进行了测试。这表示:
-
-
该焊接系统可依据 IP 23 防护等级的规定在户外安装和操作。但是,必须避免直接受潮
(例如雨水)。
设备坠落或倾翻可致人死亡。
▶
电源的通风通道是重要的安全装置。在选择安装位置时,请确保冷却空气能够畅通无阻地
流入和流出设备前后的通风口。系统内不得直接吸入任何导电粉尘(例如来自金刚砂作
业)。
危险!
此安装工作必须由接受过培训且有资质人员执行。
遵守 OI 中的安全规程,尤其是“安全检查”部分。
可防止直径超过 12 mm (0.47 in.) 的坚硬异物侵入
防止产生任何倾斜角度高达 60° 的喷水
危险!
请将设备牢固安装在坚实平整的表面上。
电源连接 本设备根据功率铭牌上指定的电源电压而设计。“技术数据”部分包含了针对电源引线规
定的熔断保护信息。如果设备规格中不包含电源线或电源插头的相关信息,请按照您所在
国家/地区的标准配备合适的电源线或电源插头。
小心!
进行尺寸过小的电气安装会造成严重损害。
电源引线及其熔断保护功能应根据现有的电源进行设计。
▶
应遵照功率铭牌上的技术数据。
▶
39

设置激光焊接系统
危险!
如果电源在安装过程中连接至电网,则存在造成严重人身伤害和财产损失的危险。
首次投入使用之前,请阅读电源使用说明书中“安全规程”一章中的信息。仅在以下情况
下执行所有准备步骤
将电源上的电源开关切换到 - O -,
▶
电源线已从电网断开。
▶
初始状态:
存在机器人和机器人控件已就位并做好运行准备
设置焊接系统:
安装立式支架
1
将冷却器安装在立式支架上
2
将电源连接到冷却器
3
安装焊丝卷筒
4
在焊丝卷筒上安装 WF 卷筒固定件
5
设置并连接送丝机卷取设备
6
将电源连接到机器人控件
7
连接遥控器
8
设置激光焊接机头:
在机器人上安装激光焊接机头
9
安装和连接 SplitBox SB 360i LaserHybrid
10
连接 Crossjet
11
将 LaserHybrid 中继线连接到激光焊接机头
12
在激光焊接机头上连接/更换送丝管
13
安装/更换送丝轮
14
连接激光光学系统和附加抽排系统
15
准备焊枪
16
在机器人上安装 LaserHybrid 中继线
17
穿入焊丝
18
启动之前的其他活动:
设置激光焊接机头
19
创建参考程序
20
激光焊接的信号序列
21
开始焊接前的措施
22
在工件和电源之间建立接地连接
23
40

在机器人上安装激光焊接机头
90 mm
406,5 mm
机器人上的连接选
项
ZH
示例:带 Trumpf 激光光学系统的激光焊接机头
注意!
IPG 激光光学系统只能安装在较低位置且无法调整。
41

将激光焊接机头安
1
装在机器人上
根据机器人制造商的规范将激光焊接机
1
头安装到机器人上。
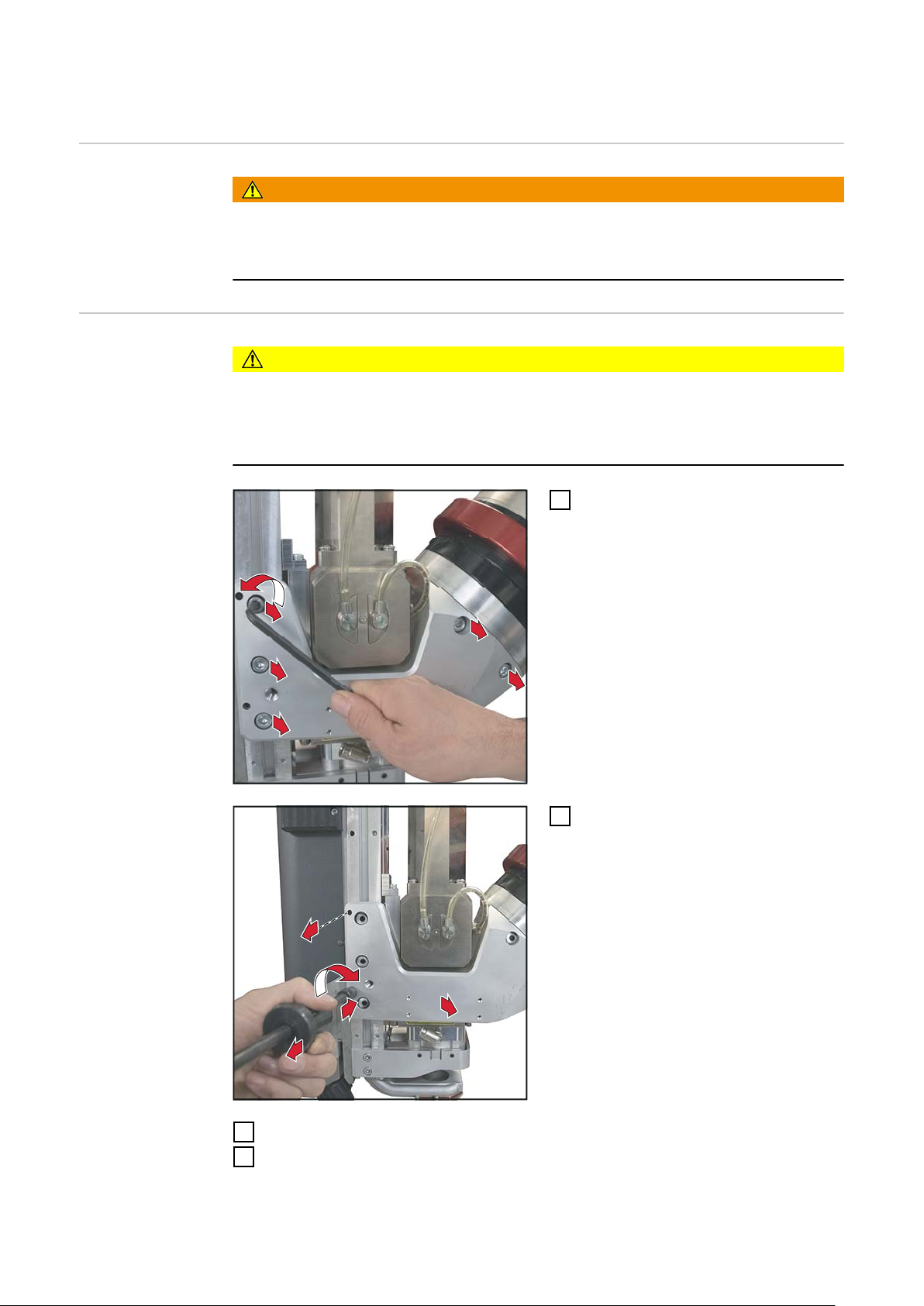
42

安装和连接 SplitBox SB 360i LaserHybrid
3
3
3
3
4
5
7
6
5
ZH
将 SplitBox SB
360i LaserHybrid
安装至墙壁
断开 SplitBox SB 360i LaserHybrid 和 SplitBox 支架的连接
1
根据机器人的不同,在机器人上为 SplitBox 支架安装适当的支撑!
2
重要!请遵守机器人制造商的安装说明书。
使用 4 个 6mm 的内六角螺钉将
3
SplitBox 安装在支架上
拧紧力矩 = 24 Nm
将中继线的应变消除装置插入开口并向
4
前推动
使用 2 个 4 mm 内六角螺钉固定中继线
5
的应变消除装置
开口固定卡夹 (x2)
6
将中继线安装到固定卡夹中
7
43

8
8
闭合固定卡夹
9
10
10
10
10
10
10
a
*
b
c
d
e
f
8
按照图示将 SplitBox SB 360i
9
LaserHybrid 插入 SplitBox 安装底座
上方使用 3 个 TX25 螺钉,下方使用 3
10
个 TX25 螺钉,将 SplitBox 固定到
SplitBox 安装底座中
拧紧力矩 = 3.5Nm
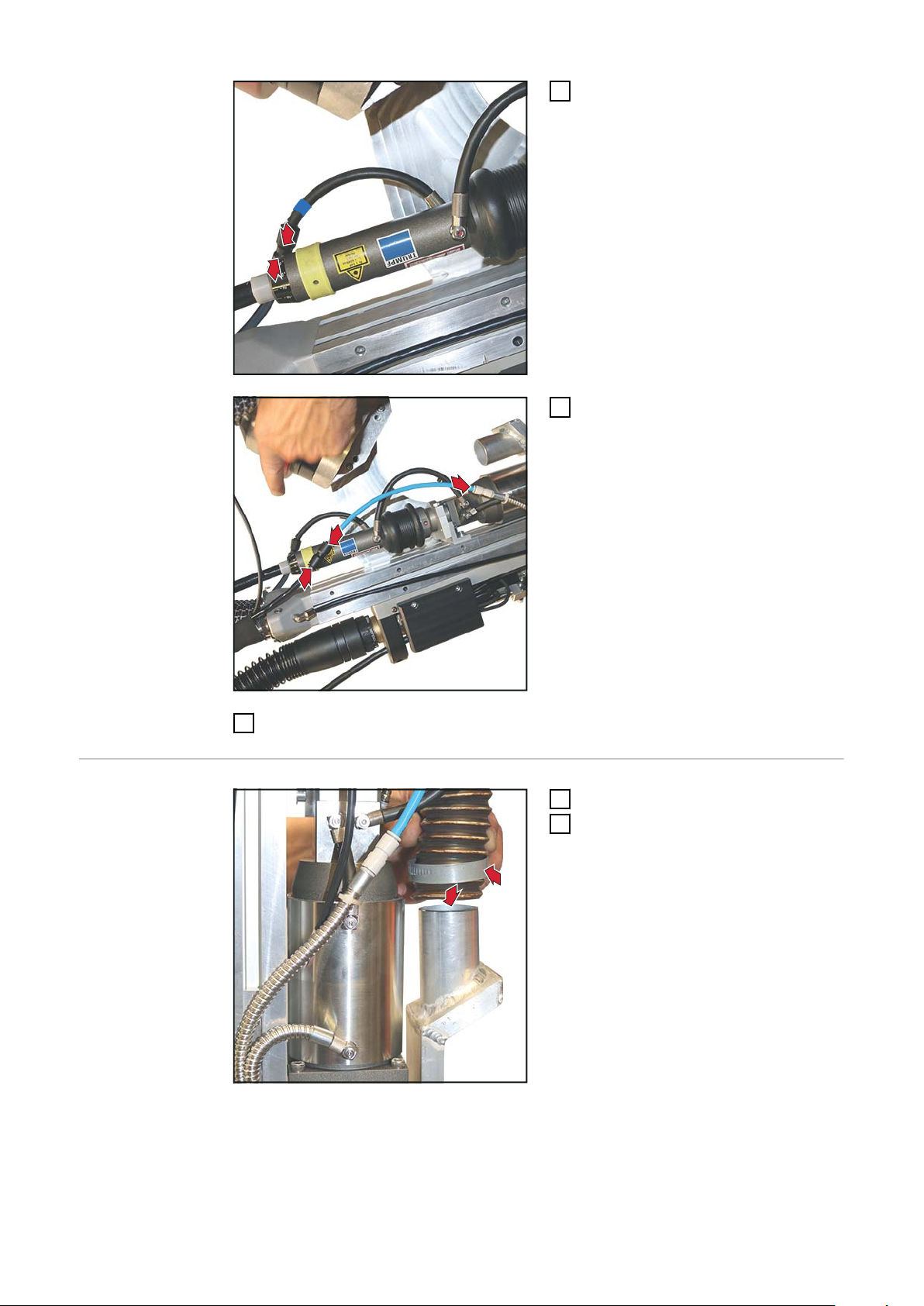
连接 SplitBox SB
360i LaserHybrid
将中继线连接到 SplitBox:
1
a)电力电缆
b)焊枪冷却回流(红色)
c)焊枪冷却供应管线(蓝色)
d)保护气体
e)SpeedNet(连接中继线)
f)SpeedNet(遥控器)
* 气体吹扫接口
44

3
2
4
将 LaserHybrid 中继线连接到焊枪接口
6
5
7
8
7
8
2
(FSC)
夹紧环杆
3
打开 LaserHybrid 中继线上的盖子
4
将用于焊枪冷却的终端连接器连接到
5
LaserHybrid 中继线
连接 Crossjet 进气口
6
ZH
重要!连接 Crossjet 出气口软管时,请确
保切割环已就位!
连接 Crossjet 出气口 (x 2)
7
使用尺寸为 24 mm 的六角螺母将软管
8
固定在终端连接器上
拧紧力矩 = 50 Nm
重要!将六角螺母固定在接口上时,使用
22 mm 的叉形扳手将物品固定到位
45

9
9
9
9
将中继线连接到电源
(1)
10
选件:
连接用于光学系统冷却的软管(插入
9
式)
蓝色标记 = 冷却剂供应管线
(1) 数据线 3 x 0.5mm²
(例如,用于分析附加的压力监
控)
46

连接 Crossjet
2
1
3
3
4
6
5
ZH
连接 CrossJet
将 CrossJet 排气软管插入开口
1
固定板的位置应使其在 CrossJet 排气
2
软管的凹槽
中(x2 - 也在相反侧)
用 2 个 3mm 内六角螺钉固定
3
(x2 - 也在相反侧)
根据机器人的运动,确定所需的空气软
4
管长度,并根据尺寸切割空气软管
撤回保护软管
5
重要!连接 CrossJet 出气口软管时,
请确保切割环已就位!
连接 CrossJet 出气口
6
使用六角螺母 (24mm) 将软管固定到连
7
接处
拧紧力矩 = 50 Nm
重要!将六角螺母固定到 22mm 连接
插座时,使用 22mm 叉形扳手。
在另一侧重复该过程
8
47

8
8
将保护软管拉到终端连接器上
9
48

将 LaserHybrid 中继线连接到激光焊接机头
1
2
45,0200,1404
4
3
3
4
5
ZH
将 LaserHybrid 中
继线连接到激光焊
接机头
重要!连接 LaserHybrid 中继线时,确保接口上的销和连接没有弯曲或损坏。
LaserHybrid 中继线尽可能走直线。
连接 LaserHybrid 中继线
1
固定 LaserHybridHybrid 中继线:
2
使用焊枪叉形扳手和扭矩叉形扳手拧紧
管接螺母
拧紧力矩 = 11 Nm
卸下 2 个尺寸 2.5 mm 的内六角螺钉
3
卸下另一侧的 2 个 2.5mm 内六角螺钉
4
取下驱动装置盖
5
49

7
6
6
连接 CrashBox 电缆
1
3
2
4
5
6
将电缆放入凹槽
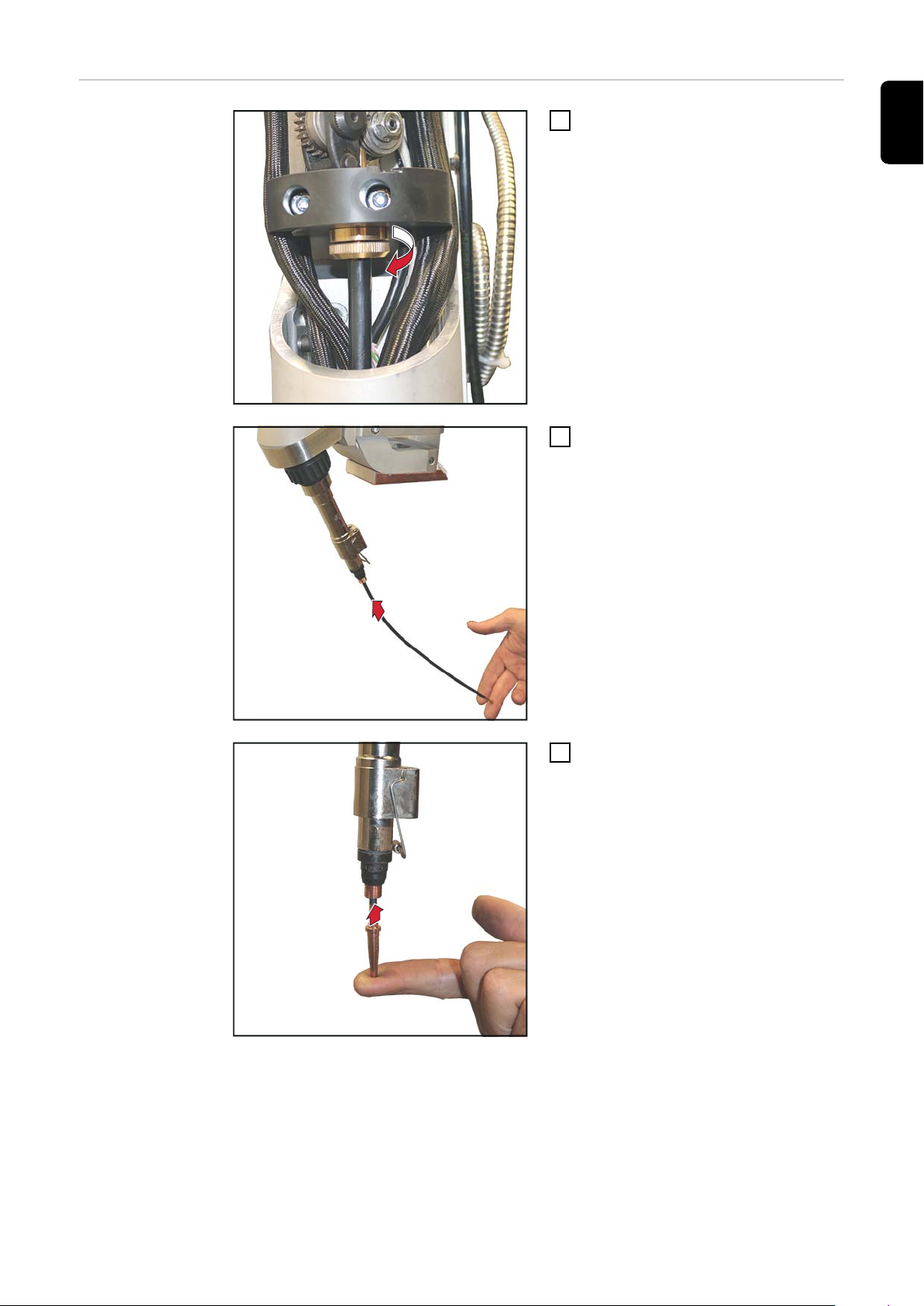
7
在激光焊接机头上
连接/更换送丝管
将送丝管插入激光焊接机头中
1
按住锁定按钮
2
将送丝管尽可能深地插入锁定装置中,
3
以释放锁定按钮
松开锁定键
4
继续推动送丝管,直到锁定装置锁定到
5
位并且锁定按钮弹出
50
去除:
按住锁定按钮
1
将送丝管从锁定装置中拉出
2

安装/更换送丝轮
3
2
4
5
6
1
安装/更换送丝轮 重要!必须拉出焊丝才能更换送丝轮。
注意!
断开外部送丝管
1
将夹紧卡箍打开
2
卸下带螺纹的轴
3
拆下送丝轮
4
卸下尺寸为 10mm 的六角螺母 - 使用
5
激光焊接机头附带的驱动轮钥匙将其固
定在送丝轮上
拆下送丝轮
6
安装顺序相反
ZH
请勿用其他型号替换附带的送丝机部件。
特别是未使用指定的 V 型凹槽辊时,可能在送丝过程中引起问题。
51

连接 IPG 激光光学系统和附加抽排系统
1
1
5x
1
1
1
1
a
c
b
a
b
连接 IPG 激光光学
系统
小心!
来自上方的污染会损坏激光焊接机头。
遵守激光光学系统制造商的操作说明书、规范和安全提示
▶
请在连接前放置激光焊接机头以使其纵轴位于水平方向之外 (> 90°)。这样可确保灰尘
▶
无法从上方进入激光光学系统。
卸下 5 个尺寸为 6 mm 的内六角螺钉
1
安装时请注意:
3 个较短螺钉一个位于另一个下方;2 个较
长螺钉彼此相对。
卸下 2 个定位销:
2
a)安装并拧紧定位销的拉拔工具
b)向后敲击拉拔工具的撞击锤,以便
取下定位销
c)卸下机器人连接支架
52

放置激光焊接机头以使其纵轴位于水平
4
4
6
5
b
a
3
方向之外 (> 90°)
重要!切勿使用压缩空气清洁连接区域!
请用抹布清洁连接区域。
4
卸下光缆接头的保护盖板
5
卸下光缆接口的保护盖板
6
ZH
重要!连接光缆时,请注意接头上定位销的
位置!
连接光缆:
7
a)按下按钮
b)连接光缆接头
53

8
重要!密封光缆时只需使用去除后不会留下
9
9
1
0
10
任何残留物的胶带便可,例如德莎 4172。
用胶带在光缆接头和接口附近的区域缠
8
绕几次并对其进行清洁密封
连接光学冷却系统,拧紧管接螺母
9
连接光学系统冷却供应管线(蓝色标
10
记)
54

11
11
垂直放置激光焊接机头
3
1
2
5
5
4
6
12
连接光学系统冷却回流
11
ZH
连接 IPG 附加抽排
系统
安装机器人连接支架
1
向上推动凹槽螺母,使槽螺母的顶孔位
2
于机器人连接支架顶孔的下方。
使用 6mm 短内六角螺钉轻轻固定凹槽
3
螺母和机器人连接支架
插入定位销 (x2)
4
安装并拧紧定位销的拉拔工具
5
向前敲击拉拔工具的撞击锤,以便定位
6
销就位
55

5x
7
8
7
7
7
安装时请注意:
9
10
10
11
14
12
13
3 个较短螺钉一个位于另一个下方;2 个较
长螺钉彼此相对。
插入剩余的 4 个内六角螺钉,尺寸为 6
7
mm
使用 5 个 6mm 内六角螺钉将机器人连
8
接支架固定到位
拧紧力矩 = 24 Nm
将固定卡夹的一半连接到机器人连接支
9
架上
用两颗 2.5 mm 内六角螺钉固定半个固
10
定卡夹
用半个固定卡夹定位附加抽排系统
11
安装另外半个固定卡夹
12
用固定卡夹和 4 个 2.5 mm 内六角螺钉
13
将附加抽排系统固定到位
连接抽排软管并用软管固定卡夹固定
14
56

连接其他激光光学系统和附加抽排系统
1
1
5x
1
1
1
b
a
a
b
c
ZH
连接其他激光光学
系统
小心!
来自上方的污染会损坏激光焊接机头。
遵守激光光学系统制造商的操作说明书、规范和安全提示
▶
请在连接前放置激光焊接机头以使其纵轴位于水平方向之外 (> 90°)。这样可确保灰尘
▶
无法从上方进入激光光学系统。
卸下 5 个尺寸为 6 mm 的内六角螺钉
1
安装时请注意:
3 个较短螺钉一个位于另一个下方;2 个较
长螺钉彼此相对。
卸下 2 个定位销:
2
a)安装并拧紧定位销的拉拔工具
b)向后敲击拉拔工具的撞击锤,以便
取下定位销
c)卸下机器人连接支架
57

放置激光焊接机头以使其纵轴位于水平
4
5
7
6
3
方向之外 (> 90°)
使用压缩空气清洁连接区域
4
卸下光缆接口的保护盖板
5
用压缩空气清洁光缆接头
6
卸下光缆接头的保护盖板
7
58

b
a
b
c
重要!连接光缆时,请注意接头上定位销的
10
10
位置!
连接光缆:
8
a)按下按钮
b)向光学系统方向拉回橡胶套
c)连接光缆接头
检查光缆接头周围的橡胶套是否已清洁
9
密封
重要!对面的图片为错误定位的橡胶
套!
图中所示的橡胶套在箭头所指区域存在
扭结,因此不属于完全密封。
ZH
橡胶套位置不正确!
橡胶套无法完全密封。
使用 2.5mm 内六角螺钉连接光学系统
10
冷却器
拧紧力矩 = 4 Nm
59
11
11
连接光学系统冷却供应管线(蓝色标
12
12
12
2
1
11
记)
连接光学系统冷却回流
12
连接附加抽排系统
垂直放置激光焊接机头
13
将软管推过连接
1
用软管夹将软管固定到位
2
60

3
4
用于机器人连接的定位支架
5
5
6
7
7
8
3
向上推动凹槽螺母,以使凹槽螺母的顶
4
孔位于机器人连接支架的顶孔下方。
使用 6mm 的内六角短螺钉固定,但不
5
完全拧紧用于连接机器人的凹槽螺母和
支架
ZH
插入 2 个定位销
6
定位并连接用于定位销的拉拔工具
7
向前敲击拉拔工具上的振动块,然后放
8
置定位销
61

5x
10
9
9
9
组装时注意:
3 个较短的螺钉一个挨一个位于下方; 2 个
较长的螺钉彼此相对。
插入剩下的 4 x 6mm 内六角螺钉
9
使用 5 个 6mm 内六角螺钉将机器人连
10
接支架固定到位
拧紧力矩 = 24 Nm
62

准备焊枪
(1) (2) (3)
1
3
2
可用焊枪 激光焊接机头可使用以下焊枪:
ZH
(1) MTB 500 LH/W/0°/L284
IPG 激光光学系统用标准焊枪,焦
距 F400
(2) MTB 500 LH/W/0°/L228
Trumpf、Precitec 和 Highyag 激
光光学系统用标准焊枪,焦距 F300
(3) LH 360A 0°
Trumpf、Precitec 和 Highyag 激
光光学系统用可选焊枪,焦距 F300
装备 MTB 500 LH
焊枪
打开滚花高螺母
1
卸下气体喷嘴
2
拆下导电嘴
3
63

4
从底部将导丝管安装到焊枪内
5
6
9
4
使用导电嘴将导丝管完全安装到焊枪内
5
应用气体喷嘴
6
拧紧滚花高螺母
7
64
装备 LH 360 焊枪
1
2
3
打开滚花高螺母
1
从底部将导丝管安装到焊枪内
2
ZH
使用导电嘴将导丝管完全安装到焊枪内
3
65

4
5
通过导电嘴定位管接螺母
8
6
7
9
4
拧紧管接螺母
5
尺寸 12 mm
拧紧力矩 = 3 Nm
应用气体喷嘴
6
使用 4mm 内六角螺钉固定气体喷嘴
7
向下折叠支架
8
拧紧滚花高螺母
9
66

在机器人上安装中继线
(1)
(2)
(4)
44,0360,0099
10 x 5 Nm
2,9 Nm
2,9 Nm
8 Nm
27 Nm
(11)
42,1000,0112
44,0350,0254
(11)
(12)
(14)
M10 / 45 Nm
(3a)
(3)
(4)
(6)
(7)
(8)
(7)
(10)
(5)
(9)
(6)
(11)
(13)
ZH
在机器人上放置中
继线
重要!激光焊接机头的供货范围不包括可选的 LaserHybrid 中继线支架。
(1) 安装 HP LH xx
安装板取决于机器人型号
(2) 物品型材 10 50 x 50 mm, 2 m
(42,1000,0112)
(3) 可选的延长臂
(44,0350,0254)
(3a)
CMT 焊丝缓冲器的安装板
(45,1200,0247)
(4) 凹槽螺母
(5) 下钣金部件
(6) 送丝管的开口
(7) 光缆开口
(8) 抽吸装置软管的开口
(配有转接件)
(9) LaserHybrid 中继线的开口
(10) 抽吸装置软管的开口
(11) 六角螺钉
M4 x 60 mm
(12) 六角螺钉
M8 x 20 mm
(13) 抽吸装置软管套件的转接件,直径
(14) 六角螺钉
41/51 mm
(42,0411,9036)
M6 x 25 mm
67

安装
根据机器人制造商的说明将安装板 (1) 安装到机器人臂上
1
将型材 10 50 x 50 mm (2) 切割成机器人臂的长度
2
使用凹槽螺母和 4 个 17mm 的六角螺钉,将型材 10 50 x 50 mm (2) 安装到安装板 (1)
3
拧紧力矩 = 10 Nm
拆下 3 mm 的六角螺钉 (11),然后拆卸 LaserHybrid 中继线支架的下钣金部件 (5)
4
松开下钣金部件 (5) 和凹槽螺母 (4) 之间的 2 个 6 mm 的六角螺钉 (12),以便凹槽螺母
5
(4) 可以推入型材 10 50 x 50 mm (2) 的顶部凹槽中
将凹槽螺母 (4) 和下钣金部件 (5) 推入型材 10 50 x 50 mm (2) 上的顶部凹槽
6
拧紧 2 个 6 mm 的六角螺钉 (12),并使用凹槽螺母 (4) 将下钣金部件 (5) 固定到型材
7
10 50 x 50 mm (2) 上
拧紧力矩 = 27 Nm
对所有 LaserHybrid 中继线支架重复步骤 4 - 7
8
使用 3 mm 的六角螺钉 (11),将 LaserHybrid 中继线支架的工件装回下钣金部件 (5)
9
拧紧力矩 = 2.9 Nm
仅适用于 CMT LaserHybrid 焊接系统:
10
将焊丝缓冲器和安装板 (3a) 安装在延长臂 (3) 上
对于所有 LaserHybrid 中继线支架,移除顶部和底部的塑料部件
11
10 个 5 mm 的六角螺钉 (14)
将软管、电缆和 LaserHybrid 中继线放入 LaserHybrid 中继线支架的开口中
12
对于所有 LaserHybrid 中继线支架,安装塑料部件并加以固定
13
10 个 5 mm 的六角螺钉 (14),拧紧力矩 = 4 Nm
68

穿入填充焊丝
2
1
3
3
穿入焊丝 重要!穿丝之前,仔细清理焊丝端头的毛刺。
要求:
-
送丝管已连接
-
焊丝已穿入送丝机中
-
激光焊接机头中的送丝轮和入口喷嘴已就位
关闭夹紧卡箍
1
按下穿丝按钮,直到焊丝从焊枪中出来
2
ZH
设置压紧力
3
69

设置激光焊接机头
干伸长 带 Trumpf 激光光学系统的激光焊接机头有两种不同的安装板,具体取决于应用:
-
不得将 TCP 放在激光焦点上。
-
为实现高性能
-
使用相同的调整路径,确保激光焦点和
焊丝尖端之间的距离更大
安装板 21 mm
-
根据应用情况,TCP 可能位于激光焦
点上。
70
安装板 17.5 mm

(1)
(2) (3)
注意!
y
z
x
调节焊枪的空间位置时,请注意相应的干伸
长,具体取决于所使用的安装板。
(1) 焊枪
(2) 导电嘴
(3) 干伸长
安装板 17.5 mm:
干伸长 = 14mm
安装板 21 mm:
干伸长 = 20 mm
所有其他激光光学系统的干伸长 = 20 mm。
可调轴 电弧法相对于激光束的空间位置可以在三个笛卡尔坐标轴中进行调整:
ZH
小心!
激光焊接机头垂直于工件表面会损坏光纤。
如果激光光学系统与工件表面成 90°,则激光束会直接反射到激光光学系统中。这可能会
严重损坏光纤。
始终引导激光焊接机头进入主站或从站!
▶
71

激光焊接机头上的
(1)
(2)
(3)
(4)
(5)
(6)
调节设备
激光焊接机头配有调节设备,可在 x、y 和 z 坐标轴上精确定位:
(1) Z 轴的刻度
(2) 带有 y 轴刻度的调节螺钉
调节范围 +/- 4.5 mm
内六角螺钉尺寸 5 mm
¼ 圈对应 0.25mm 的调节路径
(3) 带有 X 轴刻度的调节螺钉
调节范围:+7/-2 mm
内六角螺钉尺寸 5mm
¼ 圈对应 0.25mm 的调节路径
使用游标刻度尺 0.1mm 的读取精度
(4) X 轴刻度
(5) Z 轴上进行附加调整的刻度
调节范围:0/+10 mm
Trumpf 光学支撑的底座位置 = 0
要在 z 轴上进行附加调整,请拧松尺寸 5mm 的两个内六角螺钉并移动光学系统支
架。
内六角螺钉的拧紧力矩 = 10 Nm
(6) 带有 Z 轴刻度的调节螺钉
调节范围:+12/-7 mm
内六角螺钉尺寸 5mm
¼ 圈对应 0.25mm 的调节路径
使用游标刻度尺 0.1mm 的读取精度
72

调节 x 轴
(1)(1)
1
1
2
2
注意!
在卸下驱动装置盖的情况下调整 x 和 y 轴。
调节之后,重新安装驱动装置盖。
▶
拧松 2 个尺寸 5mm 的内六角螺钉 (1)
1
使用调节螺钉和尺寸 5mm 的内六角扳
2
手调节 x 轴:
1 圈对应 1.0mm
ZH
调节 x 轴后,重新拧紧 2 个尺寸 5mm 的内六角螺钉 (1)
3
73

调节 y 轴
(1)
(1)
1
1
2
2
注意!
在卸下驱动装置盖的情况下调整 x 和 y 轴。
调节之后,重新安装驱动装置盖。
▶
拧松 2 个尺寸 5mm 的内六角螺钉 (1)
1
使用调节螺钉和尺寸 5mm 的内六角扳
2
手调节 y 轴:
1 圈对应 1.0mm
74
调节 y 轴后,重新拧紧 2 个尺寸 5mm 的内六角螺钉 (1)
3

调节 z 轴
(1)
(1)
(2)
(2)
1
1
2
2
3
3
注意!
在卸下驱动装置盖和控制箱的情况下调节 z 轴。
调节之后,重新安装控制箱和驱动装置盖。
▶
拧松 2 个尺寸 5mm 的内六角螺钉 (1)
1
拧松 2 个尺寸 5mm 的内六角螺钉 (2)
2
使用调节螺钉和尺寸 5mm 的内六角扳
3
手调节 z 轴:
1 圈对应 1.0 mm
ZH
调节 z 轴后,重新拧紧 4 个尺寸 5 mm 的内六角螺钉 (1)和 (2):
4
螺钉 (1) 的拧紧力矩 = 6.5 Nm
螺钉 (2) 的拧紧力矩 = 10 Nm
75

创建参考程序
安全
工作不当可能会造成严重的人身伤害和财产损失。
▶
▶
概要 所描述的调节工作需要低功率的先导激光。
还需要创建一个参考程序:
-
-
创建参考程序 激光焊接机头附带一个可相对于激光焦点精确调整焊丝位置的金属测量量具。
该测量量具安装在机器人的工作范围内,可用于创建设备系列部件的参考程序。
在焊接第一个设备系列部件之前创建参考程序
要求:
-
-
-
危险!
此安装工作必须由接受过培训且有资质人员执行。
遵守 OI 中的安全规程,尤其是“安全检查”部分。
首次安装激光焊接机头后
对新部件进行编程时,如果调整单位上的 x、y 和 z 值已更改。
必须安装并全面连接激光焊接机头。
必须穿入焊丝。
必须根据激光光学系统以 mm 为单位设置相应的焊丝干伸长:
Trumpf 激光光学系统:
安装板 21 mm ...干伸长 = 20 mm
安装板 17.5 mm...干伸长 = 14 mm
其他所有激光光学系统:
干伸长 = 20 mm
-
遵守激光光学系统的焦点宽度规范
在机器人工作区域安装测量量具 (1)
1
开启先导激光
2
通过机器人定位激光焊接机头,使激光光学系统与测量量具成 90° 角
3
76

y
x
r
z
(1)
(1)
y
待焊接工件参数查找的默认设置:
通过机器人接近测量量具,使激光焦点
4
位于测量量具的十字线内
通过机器人降低激光焊接机头,直至焊
5
丝与测量量具相接触
使用激光焊接机头上的 x 和 y 调整装置
6
来相对于激光焦点定位焊丝
标准值:
r = 3 mm
根据测量量具上的刻度记录焊丝和激光焦点在 x 轴和 y 轴上的距离
7
将机器人中的设置保存为参考程序
8
进行试焊
9
将最佳焊接结果用作参考程序的基准。
如果由于试焊而需要更改机械 x/y 设置,则请覆盖最初创建的参考程序
10
ZH
77

激光焊接的信号序列
安全
工作不当可能会造成严重的人身伤害和财产损失。
▶
▶
焊接期间,激光焊接机头垂直于工件表面会损坏光纤。
如果激光光学系统与工件表面成 90°,则激光束会直接反射到激光光学系统中。这可能会
严重损坏光纤。
▶
连续焊接许多短焊缝时,仅在整个过程结束时关闭 CrossJet 流和外部抽排系统。
这样可以避免保护玻璃受到焊接烟尘的污染。
激光焊接的信号序列机器人初始位置:
危险!
只能由受过培训的人员对焊接工艺进行编程。
遵守 OI 中的安全规程,尤其是“安全检查”部分
小心!
始终引导激光焊接机头进入主站或从站!
注意!
设置信号“抽排打开”
1
设置信号“Crossjet 打开”
2
注意!
用于控制 SplitBox SB 360i LaserHybrid 电磁阀的“开阀”信号会发送到位 26(从 0 开始
计数)。
如果不需要预热,则从“激光焊接初始位置”继续。
预热初始位置:
要求:激光必须为光束释放做好准备。
设置信号“气体测试”
1
设置信号“激光打开”
2
以下因素决定了预热温度:
焊接速度
激光输出
到工件表面的距离
预热终点位置:
78
重置信号“激光打开”
1
重置信号“气体测试”
2
激光焊接初始位置:
要求:激光必须为光束释放做好准备。

设置信号“电弧打开”
1
等待当前的电流信号(“电弧级别”)
2
设置信号“激光打开”
3
设置信号“启动机器人”
4
激光焊接终点位置:
停止机器人移动
1
重置信号“激光打开”
2
重置信号“焊接启动”
3
等到当前电流信号 = 零
4
机器人终点位置:
重要!机械人的终点位置不是焊缝的终点。
重置信号“Crossjet 打开”
1
重置信号“抽排打开”
2
ZH
79

开始焊接前的措施
开始焊接前的措施
检查激光光学冷却系统上的冷却剂流量
1
检查焊枪冷却系统上的冷却剂流量
2
(目检冷却器的冷却剂罐)
检查激光光学系统中是否存在保护玻璃
3
检查所有盖板是否正确安装在激光焊接机头上
4
测试 CrossJet
5
测试抽排
6
测试保护气体
7
80

激光焊接系统操作建议
ZH
激光焊接系统操作
建议
为了使操作平稳,在使用激光焊接系统时,以下各项物品应始终在附近可供使用:
LaserHybrid 服务站
配有 6 巴压力的压缩空气喷枪
装有以下工具和备件的移动工具车:
-
每个直径 20 个导电嘴
-
10 个气体分配器
-
4 个气体喷嘴
-
4 个焊枪导丝管(已按长度切割)
-
一套送丝轮(含带轴的压缩杆)
-
内六角扳手套组
-
斜口钳
-
喷雾器
-
各光学制造商提供的光学清洁套件
-
1 个保护玻璃托盘,防尘包装(备用)
-
最少 10 个防护眼镜,防尘包装
重要!存货始终备有备用激光焊接机头!
-
新激光焊接机头的交货时间: 最短 8 个星期!
-
激光光学系统的交货时间: 最短 8 个星期!
-
激光光学的维修: 最短 8 个星期!
重要!在激光焊接机头的所有维修过程中,必须打开外部抽排系统。
压缩
空气供应规范 为确保正常工作,必须遵守以下压缩空气供应规范:
-
压缩空气供应至少达到 5 bar 恒定压力
-
压缩空气不含油脂
-
压缩空气不含水分
-
压缩空气不含灰尘 - 无大于 5µm 的污染物
81

82

维修
83

84

激光光学系统概述
2x M5 x 20 mm
8 mm
2x M5 x 20 mm
4 mm
4x M6 x 12 mm
4 mm
IPG
+ 4,101,310 *
IPG Wobble
+ 4,101,349 *
IPG 激光光学系统
ZH
* 光学系统支架、光学系统夹持器、机器人连接托架和安装材料
注意!
IPG Wobble 光学系统仅可从 IPG 购买。
IPG Wobble 光学系统的光学系统支架、光学系统夹持器、机器人连接托架和安装材料在
伏能士的项目编号 4,101,349 下提供。
85

Trumpf、Precitec
PRECITEC HIGHYAGTRUMPF
4x M5 x 16 mm
2x M5 x 25 mm
4x M5 x 12 mm
2x M5 x 16 mm
2x M4 x 12 mm
4x M5 x 12 mm
4x M5 x 16 mm
4x M5 x 16 mm
+ 4,101,078 * + 4,100,714 * + 4,101,068 *
**
和 Highyag 激光光
学系统
* 光学系统支架
** 未显示第二个机器人连接支架
86

更换焊枪和焊枪易损件
6x
2x
2x
ZH
安全
在操作过程中,由于焊枪被剧烈加热,因此有烧伤的危险。
▶
焊枪备件 MTB 500 LH/W/0°/L228 和 MTB 500 LH/W/0°/L284
小心!
待焊枪冷却后,才能对其进行清洁并检查其组件。
LH 360A 0°
87

更换 MTB 500 LH
2
1
1
2
3
1
6
5
45,0200,1404
焊枪
注意:
图中箭头的编号可能与工作步骤不同。
卸下 2 个尺寸为 2.5 mm 的内六角螺钉
1
卸下另一侧的 2 个 2.5mm 内六角螺钉
2
取下驱动装置盖
3
打开滚花高螺母
4
88
使用焊枪叉形扳手拧松管接螺母
5
向下取下焊枪
6
注意!
仅使用焊枪接口和扭力扳手装配焊枪,拧紧力矩 = 18 +/- 2 Nm

更换 LH 360 焊枪 注意:
2
1
1
2
3
1
图中箭头的编号可能与工作步骤不同。
卸下 2 个尺寸为 2.5 mm 的内六角螺钉
1
卸下另一侧的 2 个 2.5mm 内六角螺钉
2
取下驱动装置盖
3
ZH
打开滚花高螺母
4
89

5
6
45,0200,1404
使用焊枪叉形扳手拧松管接螺母
4
5
1
2
3
6
7
8
6x
2x
2x
5
向下取下焊枪
6
注意!
仅使用焊枪接口和扭力扳手装配焊枪,拧紧力矩 = 18 +/- 2 Nm
焊枪磨损件更换 MTB 500 LH/W/0°/L228 和 MTB 500 LH/W/0°/L284:
1
90

LH 360A 0°:
1
4
2
3
2
1
1
1
3
2
ZH
重要!组装前,清洁气体分配器、管接螺母的螺纹和枪颈。
91

更换防溅罩板和附加抽排
1
2
3
更换 IPG 防溅罩板
更换 IPG 附加抽排
系统
卸下 4 个尺寸为 2.5 mm
1
的内六角螺钉
卸下防溅罩板
2
以相反顺序执行上述步骤以进行安装。
卸下 4 个尺寸为 2.5 mm 的内六角螺钉
1
卸下另外半个固定卡夹
2
从半个固定卡夹中卸下附加抽排系统
3
以相反顺序执行上述步骤以进行安装
92

更换其他激光光学
11
10
10
13
12
12
系统的防溅罩板
注意:
图中箭头的编号可能与工作步骤不同。
卸下 2 个尺寸 2.5 mm
1
的内六角螺钉
卸下防溅罩板
2
以相反顺序执行上述步骤以进行安装
ZH
更换其他激光光学
系统的附加抽排系
统
注意:
图中箭头的编号可能与工作步骤不同。
按上一节所述拆卸防溅罩板
1
卸下 2 个尺寸 2.5 mm
2
的内六角螺钉
卸下附加抽排
3
以相反顺序执行上述步骤以进行安装
93
更换 IPG 激光光学系统
1
1
5x
1
1
1
1
a
c
b
a
b
安全
准备工作
危险!
工作不当可能会造成严重的人身伤害和财产损失。
此组装工作必须由接受过培训且有资质人员执行。
▶
遵守 OI 中的安全规程,尤其是“安全检查”部分。
▶
小心!
来自上方的污染会损坏激光焊接机头。
遵守激光光学系统制造商的操作说明书、规范和安全提示
▶
拆卸之前,将激光光学系统放在激光焊接机头的前面,使激光焊接机头的纵轴位于水
▶
平方向 (> 90°) 之外。这样可确保灰尘无法从上方进入激光光学系统。
卸下 5 个尺寸为 6 mm 的内六角螺钉
1
卸下 2 个定位销:
2
a)安装并拧紧定位销的拉拔工具
b)向后敲击拉拔工具的撞击锤,以便
取下定位销
c)卸下机器人连接支架
94
放置激光焊接机头以使其纵轴位于水平方向之外 (> 90°)
3
断开连接附加抽排的软管
4

5
5
重要!仅断开激光光学系统末端的冷却剂软
9
管,切勿断开光纤电缆。
拧松管接螺母并将冷却软管从激光光学
5
系统上断开。
以与连接相反的顺序断开光缆与激光光学系统的连接,请参见第 52 页的工作步骤 8:
撕下防尘用绝缘胶带
6
按下按钮并断开光缆
7
为光缆接头和光缆接口安装保护盖板
8
断开径向气流
9
ZH
卸下附加抽排系统(若有)(请参见第
10
92 页)
卸下 4 个尺寸为 2.5 mm
11
的内六角螺钉
卸下防溅罩板
12
95

重要!确保卸下 Crossjet 时 O 形圈未丢失。
13
13
13
13
14
1
1
1
1
1
2x
2
2
2
2
3
A
B
4
A
B
Crossjet 上的 O 形圈
卸下 4 个尺寸为 3 mm
13
的内六角螺钉
卸下 Crossjet
14
卸下 IPG 激光光学
系统
拧松 6 颗 2.5mm 内六角平头螺钉
1
切勿拆卸
卸下 4 个尺寸为 4 mm
2
的内六角螺钉
拧松 2 颗 8 mm
3
内六角螺钉
卸下 2 个尺寸为 4 mm
4
的内六角螺钉
96

5
B
A
将型材中带有六角螺钉和凹槽螺母的安
7
6
6
6
6
6
7
10
8
11
9
A
5
装支架 “B” 推离安装支架 “A”
小心!
激光光学系统如果掉落可能会损坏到无法使
用的程度。
小心地卸下并处理激光光学系统。
▶
将激光光学系统从导轨和支架中推出
6
卸下激光光学系统
7
ZH
安装 IPG 激光光学
系统
从激光光学系统上拆下安装支架 “A”
8
卸下 4 颗螺钉
9
从激光光学系统上拆下径向气流供应
10
请确保插在下面的弹簧未丢失。
11
安装时还需用到弹簧。
重要!更换激光光学系统时,确保激光光学系统和焊枪在焦距上相互匹配。
97

4
A
3
1
2
将径向气流供应安装至激光光学系统
5
5
1
用 4 颗螺钉安装径向气流供应
2
将支架 “A” 安装至激光光学系统
3
确保弹簧已插入底部
4
小心!
激光光学系统如果掉落可能会损坏到无法使用的程度。
小心插入并处理激光光学系统。
▶
重要!在装入新的激光光学系统时,请注意
正确的安装位置:
-
光缆、冷却剂软管和保护玻璃托盘的插
头必须全部可触及
-
按钮必须位于顶部
装入激光光学系统,使下方弹簧位于凹
5
槽中
98

7
6
7a
向下按压激光光学系统后端
B
A
8
A
B
A
B
9
10
6
将激光光学系统尽可能地推入支架和导
7
轨 (7a)
将型材中带有六角螺钉和凹槽螺母的安
8
装支架 “B” 尽可能地推向安装支架
“A”
ZH
用 2 颗 4 mm 内六角螺钉将安装支架
9
"B" 轻轻固定到安装支架 "A" 上
手动拧紧两颗 8mm 六角螺钉
10
99

11
11
11
11
12
插入 4 颗内六角螺钉
13
90°
15
14
11
轻轻拧紧 4 mm
12
内六角螺钉
将光缆连接至激光光学系统
13
请参见第 52 页工作步骤 4
检查/设置 IPG 激光
光学系统的焦点
通过机器人定位激光焊接机头,使激光
14
光学系统与参考测量量具成 90° 角
连接径向气流
15
根据以下章节检查/设置激光光学系统
16
的焦点
更换 IPG 激光光学系统后,如有必要,必须检查并调整焦点,以便拥有均匀的光学公差。
所描述的调整工作需要低功率的先导激光。
检查激光光学系统的焦点
设置焊丝的干伸长:
1
20 mm
100
 Loading...
Loading...