

Page 1

Fronius prints on elemental chlorine free paper (ECF) sourced from certified sustainable forests (FSC).
/ Perfect Charging / Perfect Welding / Solar Energy
Externes Startsignal VR 5000
Externes Startsignal VR 5000 Case
D300
VR 5000 external start signal
VR 5000 Case D300 external start
signal
Signal de démarrage externe VR
5000
Signal de démarrage externe
VR 5000 Case D300
Installationsanleitung
DE
Systemerweiterung
Installation instructions
EN
System upgrade
Instructions d'installation
FR
Extension de système
42,0410,1767 010-27082021
Page 2

Page 3

Inhaltsverzeichnis
VR 5000 4
Sicherheit 4
Vorgaben für den Roboter-Ausgang 4
Lieferumfang 5
Benötigtes Werkzeug 5
Vorbereitungen 5
Option „Externes Startsignal“ einbauen 6
Abschließende Tätigkeiten 8
VR 5000 Case D300 9
Sicherheit 9
Vorgaben für den Roboter-Ausgang 9
Lieferumfang 10
Benötigtes Werkzeug 10
Vorbereitungen 10
Option „Externes Startsignal“ einbauen 10
Abschließende Tätigkeiten 15
DE
3
Page 4

VR 5000
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen nur von
▶
geschultem Fachpersonal ausgeführt werden.
Dieses Dokument lesen und verstehen.
▶
Sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere Sicher-
▶
heitsvorschriften lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Netzschalter der Stromquelle in Stellung - O - schalten und die Stromquelle vom
▶
Netz trennen
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstel-
▶
len, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen
sind.
WARNUNG!
Vorgaben für den
Roboter-Ausgang
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl verwenden.
▶
VORSICHT!
Verletzungsgefahr durch heiße Systemkomponenten.
Vor Beginn der Arbeiten alle heißen Systemkomponenten auf Zimmertemperatur (+25
°C, +77 °F) abkühlen lassen, beispielsweise:
Kühlmittel
▶
wassergekühlte Systemkomponenten
▶
Antriebsmotor des Drahtvorschubes
▶
VORSICHT!
Gefahr durch Überspannung am Drahtvorschub.
Schwerwiegende Sachschäden können die Folge sein.
Der Roboter-Ausgang für die Option „Externes Startsignal VR 5000“ muss ein
▶
potentialfreier Ausgang sein.
4
Page 5

Lieferumfang
(2)
(3)
(4)
(5)
(6)
(7)
(1)
(1) (2)
(1)
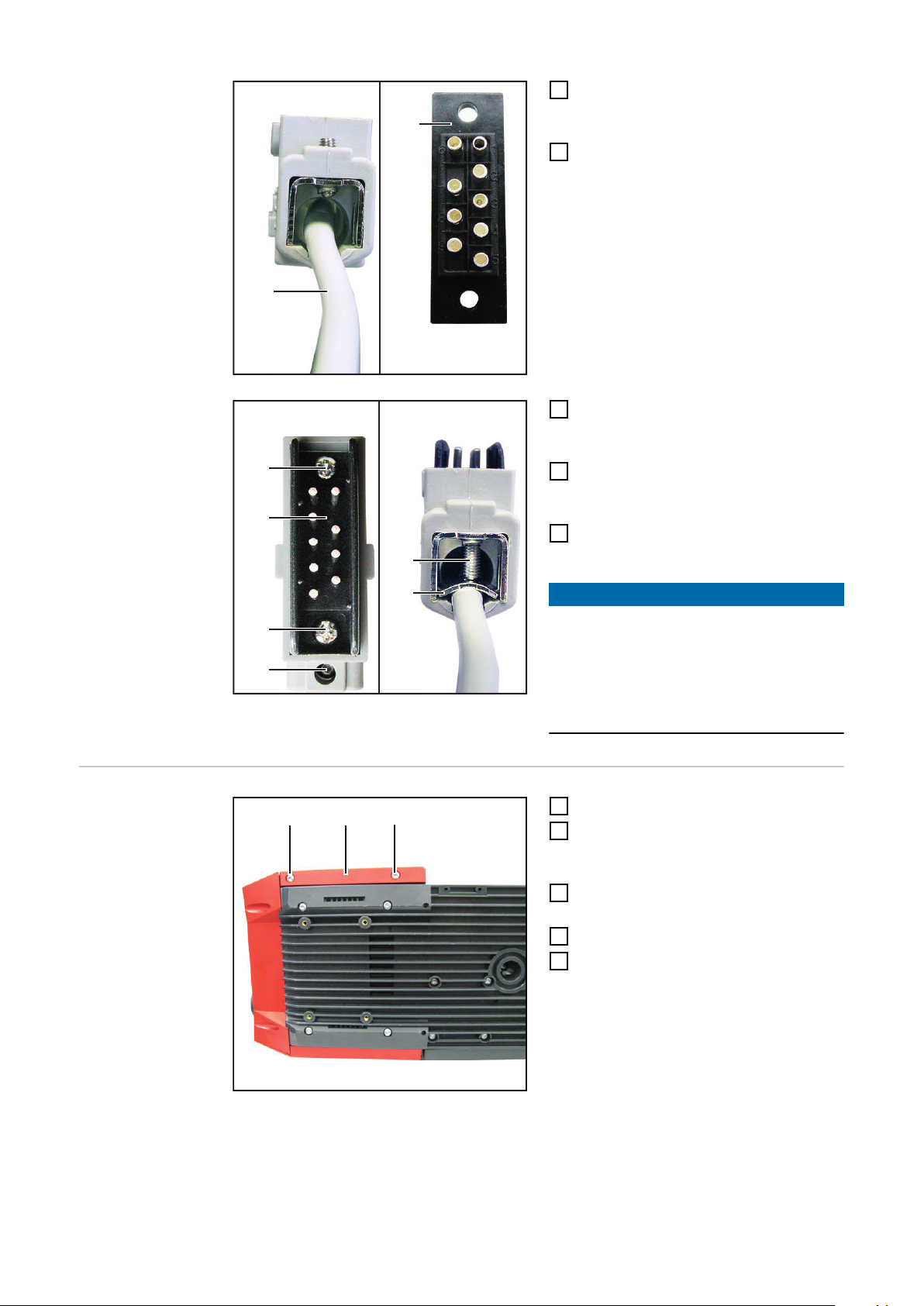
(1) Anschluss-Stecker
(2) Steckereinfassung mit Blindstecker
(3) 2 x Mutter M4
(4) 2 x Scheibe M4
(5) 2 x Fächerscheibe M4
(6) 2 x Schrauben (2,9 mm x 16 mm)
(7) Kabelbaum mit Sockel
nicht abgebildet:
- dieses Dokument
DE
Benötigtes Werkzeug
Vorbereitungen
- Kreuz-Schraubendreher PH1
- Torx-Schraubendreher TX 25
- Steckschlüssel SW 7
Sämtliche Verbindungen des Draht-
1
vorschubes von allen anderen Systemkomponenten trennen
Draht- oder Korbspule dem Drahtvor-
2
schub entnehmen
Drahtvorschub auf einer geeigneten
3
Unterlage ablegen
2 Schrauben TX 25 (1) lösen
4
Seitenteil rechts (2) entfernen
5
5
Page 6

Option „Externes
(1)
(2)
(7)
(3)
(6)
(4)
(5)
(7)
(6)
(5)
Startsignal“ einbauen
Blindabdeckung (1) herausdrücken
1
Steckereinfassung (2) wie auf der
2
Abbildung einsetzen
Den Bereich (3) links und rechts im
3
Gehäuse des Drahtvorschubes so
weit ausfeilen, bis die Bohrungen (4)
der Steckereinfassung (2) nicht mehr
vom Gehäuse des Drahtvorschubes
verdeckt werden
Steckereinfassung (2) wie abgebildet
4
mit den mitgelieferten Scheiben (5),
Fächerscheiben (6) und Muttern (7)
festschrauben
6
Page 7

(8)
(10)
(11) (9) (11)
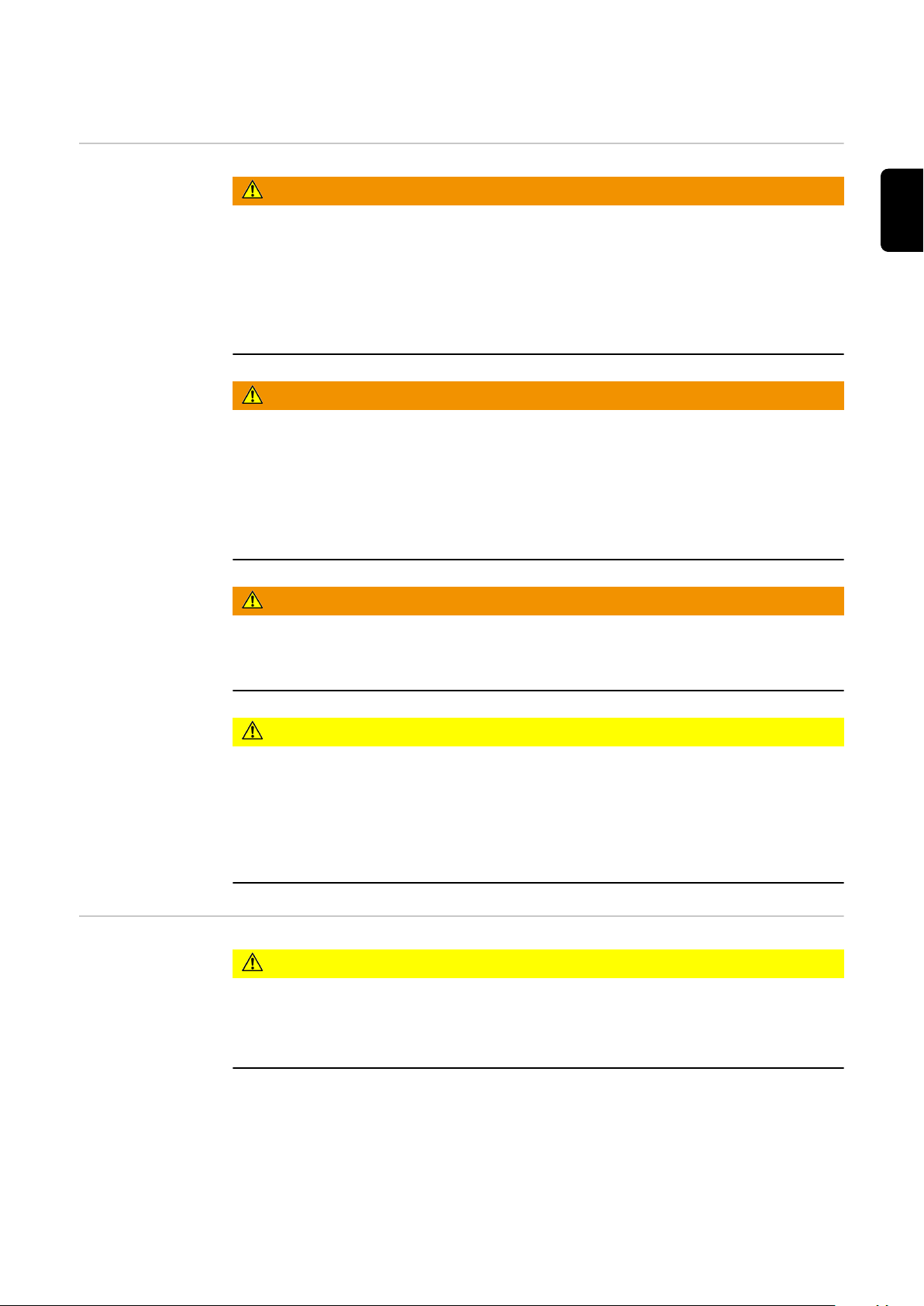
Kabelbaum (8) einfädeln
(14)
(14)
(13)
(13)
(12)
(15)(17) (16) (15)
(17)
(18)
5
Sockel (9) so einsetzen, dass sich die
6
beiden Kontakte (10) links befinden von der Rückseite des Drahtvorschubes aus betrachtet (siehe Abbildung)
Sockel (9) mit den mitgelieferten
7
Schrauben 2,9 mm x 16 mm (11) festschrauben
VORSICHT!
Gefahr durch Überspannung am Drahtvorschub.
Schwerwiegende Sachschäden können die Folge sein.
Der Roboter-Ausgang für die Option „Externes Startsignal VR 5000“ muss ein
▶
potentialfreier Ausgang sein.
DE
Stecker X3 (12) vom Print SRVT im
8
Drahtvorschub abstecken
Kabel X3:1 (13) vom Kabelbaum (8)
9
am Stecker X3 des Prints SRVT
anschließen (laut Abbildung)
- Signal ‘Gun Trigger‘
Kabel X3:6 (14) vom Kabelbaum (8)
10
am Stecker X3 des Prints SRVT
anschließen (laut Abbildung)
- Signal ‘GND‘
Stecker (12) an der ursprünglichen
11
Position am Print SRVT anstecken
Schrauben (15) des mitgelieferten
12
Anschluss-Steckers lösen und Steckereinsatz (16) dem Steckergehäuse
entnehmen
Schraube (17) lösen und Zugentlas-
13
tung (18) dem Steckergehäuse entnehmen
7
Page 8

7
8
9
5
4
3
2
1
6
(19)
(16)
Kabel (19) der kundenseitigen Steue-
(15)
(16)
(15)
(17)
(18)
(17)
(1) (2)
(1)
14
rung durch das Steckergehäuse
durchführen
Die Drähte des Kabels (19) am Pin 9
15
und 5 des Steckereinsatzes (16)
anlöten (siehe auch Schaltplan des
Drahtvorschubes)
Steckereinsatz (16) in das Stecker-
16
gehäuse einsetzen und mit zwei
Schrauben (15) festschrauben
Zugentlastung (18) in das Stecker-
17
gehäuse einsetzen und mittels
Schraube (17) festschrauben
Den Anschluss-Stecker an Sockel (9)
18
anschließen
Abschließende
Tätigkeiten
HINWEIS!
Falls der mitgelieferte Anschluss-Stecker nicht an den Sockel (9) angeschlossen wird, den Blindstecker der
Steckereinfassung (2) auf den Sockel
(9) stecken - nur dadurch wird der IPSchutzgrad des Gerätes erreicht.
Seitenteil (2) einsetzen
1
2 Schrauben 5 x 14 mm (1) mittels
2
Schraubendreher TX 25 festschrauben
- Anzugsmoment = 2,5 Nm
Drahtvorschub wieder in seine Aus-
3
gangsposition bringen
Draht- oder Korbspule einsetzen
4
Verbindungen mit anderen System-
5
komponenten wieder herstellen
8
Page 9

VR 5000 Case D300
DE
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen nur von
▶
geschultem Fachpersonal ausgeführt werden.
Dieses Dokument lesen und verstehen.
▶
Sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere Sicher-
▶
heitsvorschriften lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Netzschalter der Stromquelle in Stellung - O - schalten und die Stromquelle vom
▶
Netz trennen
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstel-
▶
len, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen
sind.
WARNUNG!
Vorgaben für den
Roboter-Ausgang
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl verwenden.
▶
VORSICHT!
Verletzungsgefahr durch heiße Systemkomponenten.
Vor Beginn der Arbeiten alle heißen Systemkomponenten auf Zimmertemperatur (+25
°C, +77 °F) abkühlen lassen, beispielsweise:
Kühlmittel
▶
wassergekühlte Systemkomponenten
▶
Antriebsmotor des Drahtvorschubes
▶
VORSICHT!
Gefahr durch Überspannung am Drahtvorschub.
Schwerwiegende Sachschäden können die Folge sein.
Der Roboter-Ausgang für die Option „Externes Startsignal VR 5000“ muss ein
▶
potentialfreier Ausgang sein.
9
Page 10

Lieferumfang
(2)
(3)
(4)
(6)
(7)
(1)
(5)
(2)(1)
(1) Anschluss-Stecker
(2) 2 x Mutter M4
(3) 2 x Scheibe M4
(4) 2 x Fächerscheibe M4
(5) Blindstecker
(6) 2 x Schrauben (2,9 mm x 16 mm)
(7) Kabelbaum mit Sockel
nicht abgebildet:
- dieses Dokument
Benötigtes Werkzeug
Vorbereitungen
Option „Externes
Startsignal“ einbauen
- Kreuz-Schraubendreher PH1
- Torx-Schraubendreher TX 25
Sämtliche Verbindungen des Drahtvorschubes von allen anderen Systemkomponen-
1
ten trennen
Draht- oder Korbspule dem Drahtvorschub entnehmen
2
Drahtvorschub auf einer geeigneten Unterlage ablegen
3
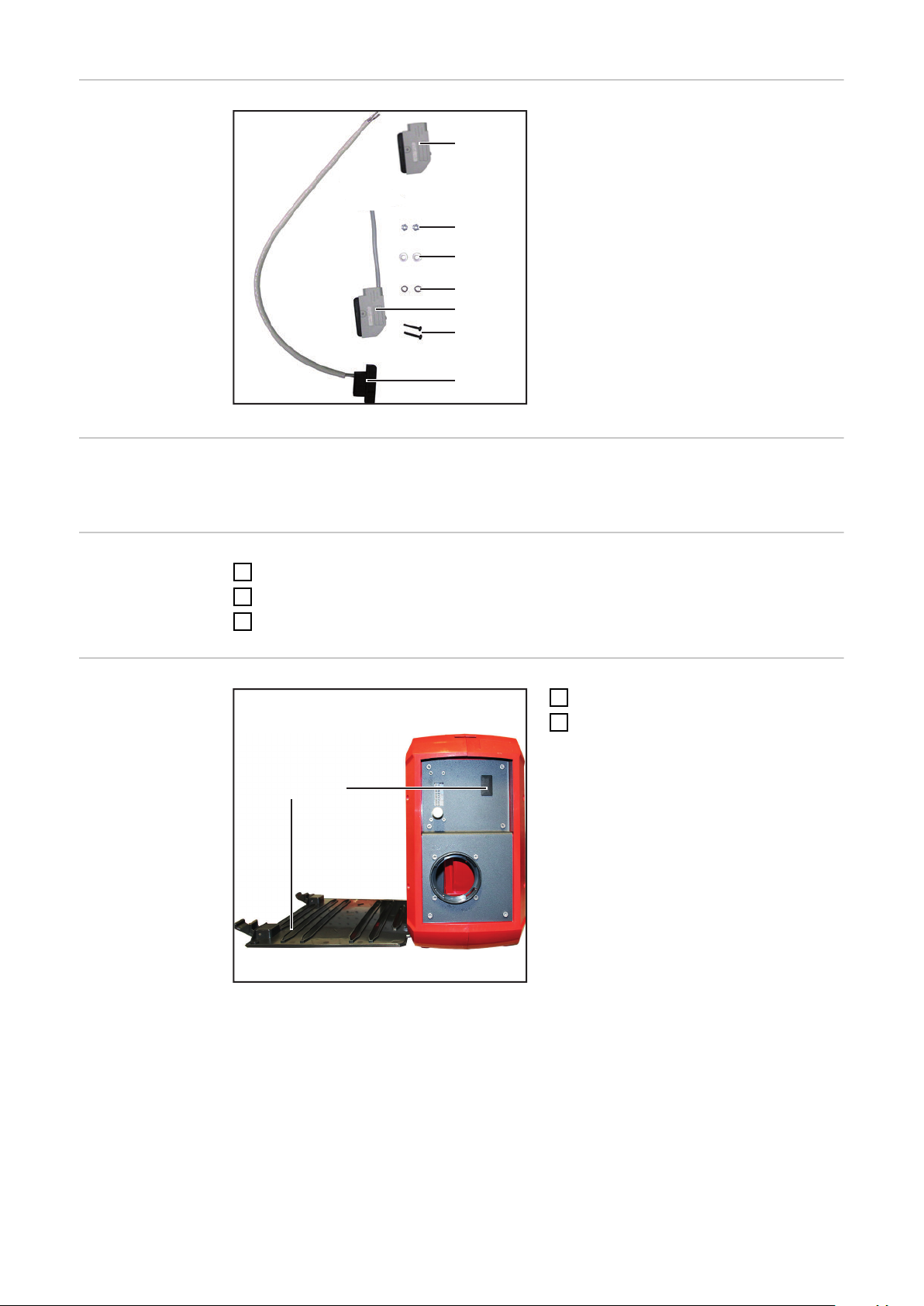
Abdeckung (1) öffnen
1
Blindabdeckung (2) entfernen
2
10
Page 11

(3)
Steckereinfassung (3) wie auf der
9
5
4
3
2
(4)
8
(5)
(4)
(4)
(3)
9
5
4
3
2
(4)
8
(7)
(7)
(4)
3
Abbildung einsetzen
Sockel (4) so einsetzen, dass sich die
4
beiden Kontakte (5) unten befinden
(siehe Abbildung)
- den Kabelbaum des Sockels
dabei in den Geräteinnenraum
führen
Das Kabel (6) vom mitgelieferten
5
Blindstecker wie abgebildet zwischen
Steckereinfassung (3) und Sockel (4)
positionieren
DE
Sockel (4) mit den mitgelieferten
6
Schrauben 2,9 mm x 16 mm (7) festschrauben
VORSICHT!
Gefahr durch Überspannung am Drahtvorschub.
Schwerwiegende Sachschäden können die Folge sein.
Der Roboter-Ausgang für die Option „Externes Startsignal VR 5000“ muss ein
▶
potentialfreier Ausgang sein.
11
Page 12

(8) (8)(9) (8)(8)
Schrauben (8) TX 25 lösen
1
(10)
1
(10)
1
(11)
(13)
(12)
(12)
(12)
7
Abdeckung (9) entfernen
8
Schrauben (10) TX 25 lösen
9
Display (11) aus dem Gehäuserahmen
10
heben
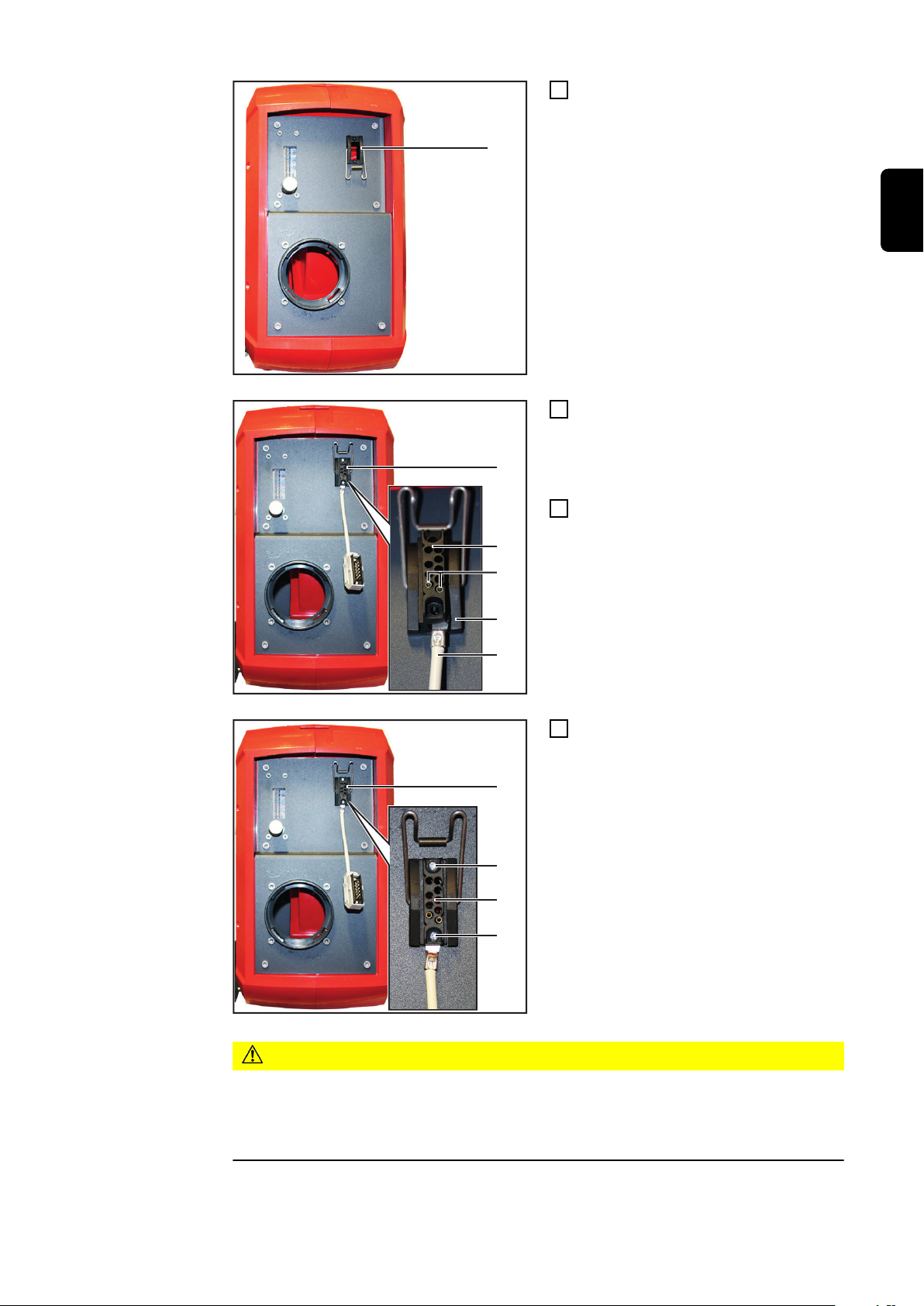
Kabelbaum (12) des Sockels (4) wie abgebildet zum Stecker X3 (13) führen
11
12
Page 13

(13)
Stecker X3 (13) vom Print SRVT im
(15) (14)
(16)(18) (17) (16)
(18)
(19)
12
Drahtvorschub abstecken
Kabel X3:1 (14) vom Kabelbaum (12)
13
am Stecker X3 des Prints SRVT
anschließen (laut Abbildung)
- Signal ‘Gun Trigger‘
Kabel X3:6 (15) vom Kabelbaum (12)
14
am Stecker X3 des Prints SRVT
anschließen (laut Abbildung)
- Signal ‘GND‘
Stecker X3 (13) an der ursprünglichen
15
Position am Print SRVT anstecken
DE
Schrauben (16) des mitgelieferten
16
Anschluss-Steckers lösen und Steckereinsatz (17) dem Steckergehäuse
entnehmen
Schraube (18) lösen und Zugentlas-
17
tung (19) dem Steckergehäuse entnehmen
13
Page 14

7
8
9
5
4
3
2
1
6
(20)
(17)
Kabel (20) der kundenseitigen Steue-
(16)
(17)
(16)
(18)
(19)
(18)
(8) (8)(9) (8)(8)
18
rung durch das Steckergehäuse
durchführen
Die Drähte des Kabels (20) am Pin 9
19
und 5 des Steckereinsatzes (17)
anlöten (siehe auch Schaltplan des
Drahtvorschubes)
Steckereinsatz (17) in das Stecker-
20
gehäuse einsetzen und mit zwei
Schrauben (16) festschrauben
Zugentlastung (19) in das Stecker-
21
gehäuse einsetzen und mittels
Schraube (18) festschrauben
Den Anschluss-Stecker an Sockel (4)
22
anschließen
HINWEIS!
Falls der mitgelieferte Anschluss-Stecker nicht an den Sockel (4) angeschlossen wird, den mitgelieferten
Blindstecker auf den Sockel (4) stecken
- nur dadurch wird der IP-Schutzgrad
des Gerätes erreicht.
Abdeckung (9) in das Gerät einsetzen
23
Schrauben (8) TX 25 festschrauben
24
- Anzugsmoment = 2,5 Nm
14
Page 15

1
(10)
1
(10)
1
(11)
Display (11) in das Gerät einsetzen
(1)
25
Schrauben (10) TX 25 festschrauben
26
- Anzugsmoment = 2,5 Nm
DE
Abschließende
Tätigkeiten
Abdeckung (1) schließen
1
Drahtvorschub wieder in seine Aus-
2
gangsposition bringen
Draht- oder Korbspule einsetzen
3
Verbindungen mit anderen System-
4
komponenten wieder herstellen
15
Page 16

16
Page 17

Contents
VR 5000 18
Safety 18
Specifications for the robot output 18
Scope of supply 19
Tools required 19
Preparatory work 19
Installing the "External start signal" option 20
And finally... 22
VR 5000 Case D300 23
Safety 23
Specifications for the robot output 23
Scope of supply 24
Tools required 24
Preparatory work 24
Installing the "External start signal" option 24
And finally... 29
EN
17
Page 18

VR 5000
Safety
WARNING!
Danger due to incorrect operation and incorrectly performed work.
This can result in serious injury and damage to property.
All the work and functions described in this document must only be carried out by
▶
trained and qualified personnel.
Read and understand this document.
▶
Read and understand all the Operating Instructions for the system components,
▶
especially the safety rules.
WARNING!
Electrical current hazard.
This can result in serious injuries or death.
Turn the mains switch of the power source to the "O" position and disconnect the
▶
power source from the mains supply.
Secure all the devices and components involved to prevent unintentional restarting.
▶
After opening the device, use a suitable measuring instrument to check that electri-
▶
cally charged components (such as capacitors) have been discharged.
WARNING!
Specifications for
the robot output
Electrical current hazard caused by an inadequate ground conductor connection.
This can result in serious injury and damage to property.
Always use the original housing screws in the original quantity.
▶
CAUTION!
Risk of scalding from hot system components.
Before starting work, allow all hot system components to cool down to room temperature
(+25 °C, +77 °F). For example:
Coolant
▶
water-cooled system components
▶
wirefeeder drive motor
▶
CAUTION!
Risk of overvoltage on the wire-feeder.
This can result in serious injury.
The robot output for the "VR 5000 external start signal" option must be a floating
▶
output.
18
Page 19

Scope of supply
(2)
(3)
(4)
(5)
(6)
(7)
(1)
(1) (2)
(1)
Tools required - PH1 Cross-head screwdriver
- TX 25 Torx screwdriver
- Socket wrench size 7
(1) Connecting plug
(2) Connector receptacle with dummy
connector
(3) 2 x M4 nuts
(4) 2 x M4 washers
(5) 2 x M4 serrated washers
(6) 2 x screws (2.9 mm x 16 mm)
(7) Cable harness with socket
Not shown:
- this document
EN
Preparatory work
Disconnect all connections on the
1
wire-feed unit from all other system
components
Take wirespool or basket-type spool
2
off the wire-feed unit
Place the wire-feed unit on a suitable
3
base
Undo two TX 25 screws (1)
4
Remove the right side panel (2)
5
19
Page 20

Installing the
(1)
(2)
(7)
(3)
(6)
(4)
(5)
(7)
(6)
(5)
"External start
signal" option
Push out the blanking cover (1)
1
Insert the connector receptacle (2) as
2
shown
File the area (3) to the left and right in
3
the wirefeeder housing until the holes
(4) of the connector receptacle (2) are
no longer concealed by the wirefeeder
housing
Fasten the connector receptacle (2)
4
using the washers (5), serrated washers (6) and nuts (7) supplied as
shown
20
Page 21

(8)
(10)
(11) (9) (11)
Thread in the cable harness (8)
(14)
(14)
(13)
(13)
(12)
(15)(17) (16) (15)
(17)
(18)
5
Position the socket (9) so that both
6
contacts (10) are on the left when
viewed from the rear of the wirefeeder
(see picture)
Fasten the socket (9) using the 2.9
7
mm x 16 mm screws (11) provided
CAUTION!
Risk of overvoltage on the wirefeeder.
This can result in serious injury.
The robot output for the "VR 5000 external start signal" option must be a floating
▶
output.
EN
Unplug the X3 plug (12) from the
8
SRVT PC board in the wirefeeder
Connect cable X3:1 (13) from the
9
cable harness (8) to the X3 plug of the
SRVT PC board (see picture)
- 'Gun Trigger' signal
Connect cable X3:6 (14) from the
10
cable harness (8) to the X3 plug of the
SRVT PC board (see picture)
- 'GND' signal
Connect the plug (12) into the original
11
position on the SRVT PC board
Undo the screws (15) of the connec-
12
ting plug provided and remove the
plug insert (16) from the plug housing
Undo the screw (17) and remove the
13
strain-relief device (18) from the plug
housing
21
Page 22
7
8
9
5
4
3
2
1
6
(19)
(16)
Guide the cable (19) of the customer-
(15)
(16)
(15)
(17)
(18)
(17)
(1) (2)
(1)
14
provided controller through the plug
housing
Solder the wires of the cable (19) on
15
pin 9 and 5 of the plug insert (16) (see
wirefeeder Circuit Diagram)
Insert the plug insert (16) into the plug
16
housing and secure with two screws
(15)
Insert the strain-relief device (18) into
17
the plug housing and secure with a
screw (17)
Connect the connecting plug to the
18
socket (9)
And finally...
NOTE!
If the connecting plug provided is not
connected to the socket (9), insert the
dummy connector of the connector
receptacle (2) into the socket (9) otherwise the device will not have the
IP protection.
Fit the side panel (2)
1
Tighten two 5 x 14 mm screws (1)
2
using TX 25 screwdriver
- Tightening torque = 2.5 Nm
Return wire-feed unit to its original
3
position
Insert wirespool or basket-type spool
4
Restore connections to other system
5
components
22
Page 23
VR 5000 Case D300
Safety
WARNING!
Danger due to incorrect operation and incorrectly performed work.
This can result in serious injury and damage to property.
All the work and functions described in this document must only be carried out by
▶
trained and qualified personnel.
Read and understand this document.
▶
Read and understand all the Operating Instructions for the system components,
▶
especially the safety rules.
WARNING!
Electrical current hazard.
This can result in serious injuries or death.
Turn the mains switch of the power source to the "O" position and disconnect the
▶
power source from the mains supply.
Secure all the devices and components involved to prevent unintentional restarting.
▶
After opening the device, use a suitable measuring instrument to check that electri-
▶
cally charged components (such as capacitors) have been discharged.
WARNING!
EN
Specifications for
the robot output
Electrical current hazard caused by an inadequate ground conductor connection.
This can result in serious injury and damage to property.
Always use the original housing screws in the original quantity.
▶
CAUTION!
Risk of scalding from hot system components.
Before starting work, allow all hot system components to cool down to room temperature
(+25 °C, +77 °F). For example:
Coolant
▶
water-cooled system components
▶
wirefeeder drive motor
▶
CAUTION!
Risk of overvoltage on the wire-feeder.
This can result in serious injury.
The robot output for the "VR 5000 external start signal" option must be a floating
▶
output.
23
Page 24
Scope of supply
(2)
(3)
(4)
(6)
(7)
(1)
(5)
(2)(1)
Tools required - Philips screwdriver (PH1)
- TX 25 Torx screwdriver
(1) Connecting plug
(2) 2 x M4 nuts
(3) 2 x M4 washers
(4) 2 x M4 serrated washers
(5) Dummy connector
(6) 2 x screws (2.9 mm x 16 mm)
(7) Cable harness with socket
Not shown:
- this document
Preparatory work
Installing the
"External start
signal" option
Disconnect all connections on the wirefeeder from all other system components
1
Take wirespool or basket-type spool off the wirefeeder
2
Place the wirefeeder on a suitable base
3
Open the cover (1)
1
Remove the blanking cover (2)
2
24
Page 25
(3)
Insert the connector receptacle (3) as
9
5
4
3
2
(4)
8
(5)
(4)
(4)
(3)
9
5
4
3
2
(4)
8
(7)
(7)
(4)
3
shown
Position the socket (4) so that both
4
contacts (5) are at the bottom (see
picture)
- Feed the cable harness of the
socket into the device
Position the cable (6) of the dummy
5
connector provided between the connector receptacle (3) and the socket
(4) as shown
EN
Fasten the socket (4) using the 2.9
6
mm x 16 mm screws (7) provided
CAUTION!
Risk of overvoltage on the wirefeeder.
This can result in serious injury.
The robot output for the "VR 5000 external start signal" option must be a floating
▶
output.
25
Page 26

(8) (8)(9) (8)(8)
Undo the TX 25 screws (8)
1
(10)
1
(10)
1
(11)
(13)
(12)
(12)
(12)
7
Remove the cover (9)
8
Undo the TX 25 screws (10)
9
Lift the display (11) out of the housing
10
frame
Guide the cable harness (12) of the socket (4) to the X3 plug (13) as shown
11
26
Page 27

(13)
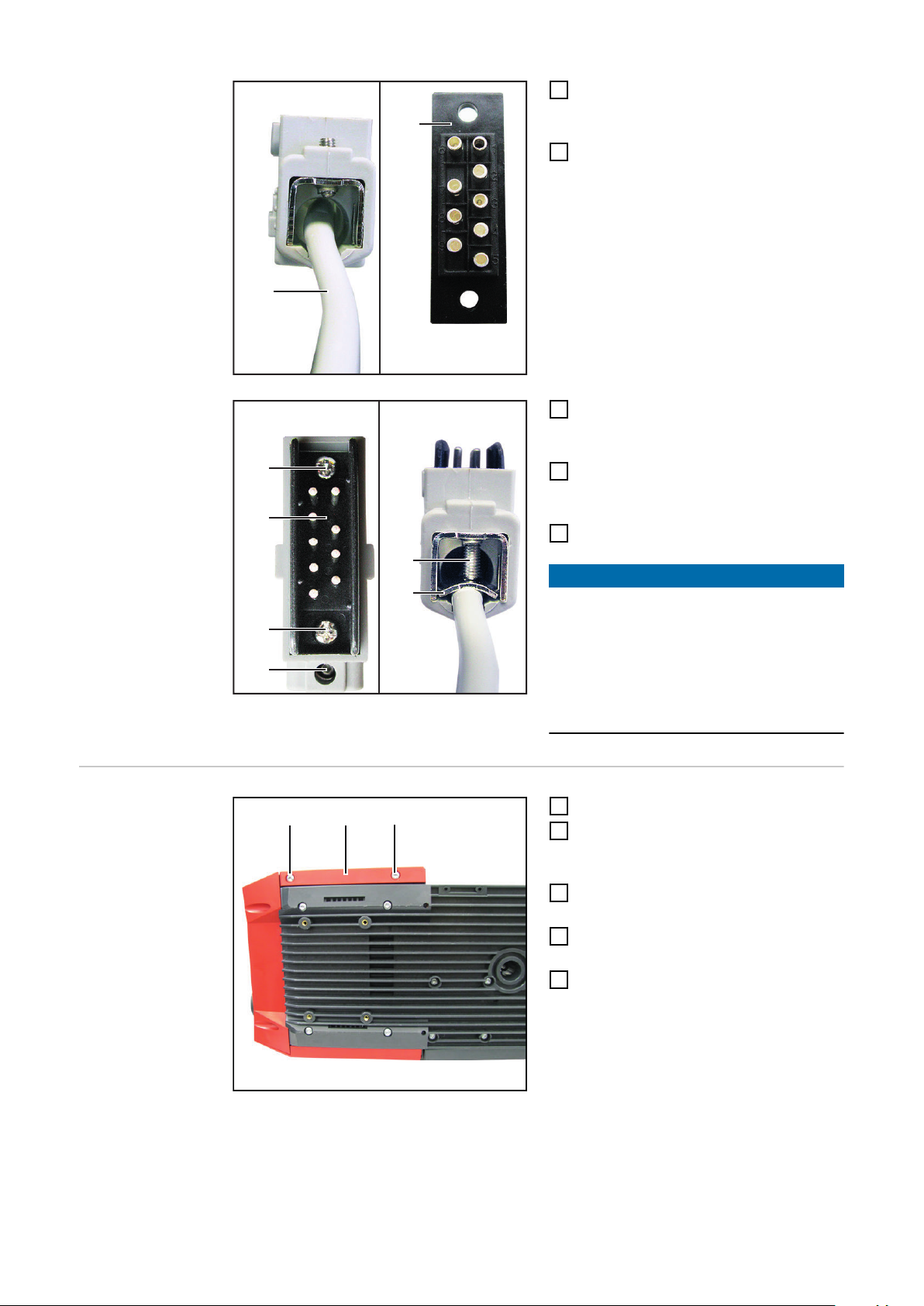
Unplug the X3 plug (13) from the
(15) (14)
(16)(18) (17) (16)
(18)
(19)
12
SRVT PC board in the wirefeeder
Connect cable X3:1 (14) from the
13
cable harness (12) to the X3 plug of
the SRVT PC board (see picture)
- 'Gun Trigger' signal
Connect cable X3:6 (15) from the
14
cable harness (12) to the X3 plug of
the SRVT PC board (see picture)
- 'GND' signal
Connect the X3 plug (13) into the ori-
15
ginal position on the SRVT PC board
EN
Undo the screws (16) of the connec-
16
ting plug provided and remove the
plug insert (17) from the plug housing
Undo the screw (18) and remove the
17
strain-relief device (19) from the plug
housing
27
Page 28

7
8
9
5
4
3
2
1
6
(20)
(17)
Guide the cable (20) of the customer-
(16)
(17)
(16)
(18)
(19)
(18)
(8) (8)(9) (8)(8)
18
provided controller through the plug
housing
Solder the wires of the cable (20) on
19
pin 9 and 5 of the plug insert (17) (see
wirefeeder Circuit Diagram)
Insert the plug insert (17) into the plug
20
housing and secure with two screws
(16)
Insert the strain-relief device (19) into
21
the plug housing and secure with a
screw (18)
Connect the connecting plug to the
22
socket (4)
NOTE!
If the connecting plug provided is not
connected to the socket (4), insert the
dummy connector provided into the
socket (4) - otherwise the device will
not have the IP protection.
Insert the cover (9) into the device
23
Secure the TX 25 screws (8)
24
- Tightening torque = 2.5 Nm
28
Page 29

1
(10)
1
(10)
1
(11)
Insert the display (11) into the device
(1)
25
Secure the TX 25 screws (10)
26
- Tightening torque = 2.5 Nm
EN
And finally...
Close the cover (1)
1
Return wirefeeder to its original posi-
2
tion
Insert wirespool or basket-type spool
3
Restore connections to other system
4
components
29
Page 30

30
Page 31

Sommaire
VR 5000 32
Sécurité 32
Prescriptions pour la sortie du robot 32
Contenu de la livraison 33
Outillage nécessaire 33
Travaux de préparation 33
Installer l'option « Signal de démarrage externe » 34
Étapes finales 36
VR 5000 Case D300 37
Sécurité 37
Prescriptions pour la sortie du robot 37
Contenu de la livraison 38
Outillage nécessaire 38
Travaux de préparation 38
Installer l'option « Signal de démarrage externe » 38
Étapes finales 43
FR
31
Page 32

VR 5000
Sécurité
AVERTISSEMENT!
Risque en cas d'erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document doivent
▶
uniquement être exécutés par du personnel qualifié.
Le présent document doit être lu et compris.
▶
Toutes les instructions de service des composants périphériques, en particulier les
▶
consignes de sécurité, doivent être lues et comprises.
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner la mort ou des blessures graves.
Placer l'interrupteur secteur de la source de courant en position - O - et débrancher
▶
la source de courant du réseau.
S'assurer que tous les appareils et composants concernés ne peuvent pas être
▶
remis en marche.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure approprié,
▶
que les composants à charge électrique (condensateurs, par ex.) sont déchargés.
AVERTISSEMENT!
Prescriptions
pour la sortie du
robot
Risque d'électrocution en cas de connexion de conducteur de terre insuffisante.
Cela peut entraîner des dommages corporels et matériels graves.
Toujours utiliser le nombre initial de vis originales du boîtier.
▶
ATTENTION!
Risque de blessure dû aux composants périphériques chauds.
Avant de débuter les travaux, laisser les composants périphériques refroidir à
température ambiante (+25 °C, +77 °F) notamment :
le réfrigérant ;
▶
les composants périphériques refroidis à l'eau ;
▶
le moteur entraînant le dévidoir.
▶
ATTENTION!
Risque au niveau du dévidoir en cas de surtension.
Cela peut entraîner des dommages matériels graves.
La sortie du robot pour l'option « signal de démarrage externe VR 5000 » doit être
▶
sans potentiel.
32
Page 33

Contenu de la liv-
(2)
(3)
(4)
(5)
(6)
(7)
(1)
(1) (2)
(1)
raison
(1) Connecteur
(2) Connexion avec prise borgne
(3) 2 x écrous M4
(4) 2 x rondelles M4
(5) 2 x rondelles en éventail M4
(6) 2 x vis (2,9 mm x 16 mm)
(7) Faisceau de câbles avec socle
Outillage nécessaire
Travaux de
préparation
- Tournevis cruciforme PH1
- Tournevis Torx TX 25
- Clé à douille de 7
Non représenté :
- le présent document
Débrancher toutes les connexions du
1
dévidoir vers les autres composants
périphériques
Retirer la bobine de fil ou la bobine
2
type panier du dévidoir
Placer le dévidoir sur un support
3
adapté
Desserrer les 2 vis TX 25 (1)
4
Retirer la partie latérale droite (2)
5
FR
33
Page 34

Installer
(1)
(2)
(7)
(3)
(6)
(4)
(5)
(7)
(6)
(5)
l'option « Signal
de démarrage
externe »
Dégager la fausse prise (1)
1
Mettre la connexion (2) en place
2
comme indiqué sur l'illustration
Limer les zones (3) à droite et à gau-
3
che du boîtier du dévidoir jusqu'à ce
que les perçages (4) de la connexion
(2) ne soient plus couverts par le
boîtier du dévidoir
Visser la connexion (2) comme
4
indiqué sur l'illustration à l'aide des
rondelles (5), des rondelles en éventail (6) et des écrous (7) fournis
34
Page 35

(8)
(10)
(11) (9) (11)
Insérer le faisceau de câbles (8)
(14)
(14)
(13)
(13)
(12)
(15)(17) (16) (15)
(17)
(18)
5
Mettre le socle (9) en place de
6
manière à ce que les deux contacts
(10) se trouvent à gauche - depuis la
vue arrière du dévidoir (voir illustration)
Visser le socle (9) à l'aide des vis four-
7
nies 2,9 mm x 16 mm (11)
ATTENTION!
Risque au niveau du dévidoir en cas de surtension.
Cela peut entraîner des dommages matériels graves.
La sortie du robot pour l'option « Signal de démarrage externe VR 5000 » doit être
▶
sans potentiel.
FR
Fixer le connecteur X3 (12) du circuit
8
imprimé SRVT dans le dévidoir
Raccorder le câble X3:1 (13) du fais-
9
ceau de câbles (8) au connecteur X3
du circuit imprimé SRVT (selon l'illustration)
- Signal « Gun Trigger »
Raccorder le câble X3:6 (14) du fais-
10
ceau de câbles (8) au connecteur X3
du circuit imprimé SRVT (selon l'illustration)
- Signal « GND »
Brancher le connecteur (12) à sa posi-
11
tion d'origine sur le circuit imprimé
SRVT
Desserrer les vis (15) du connecteur
12
fourni et retirer l'insert de connecteur
(16) du boîtier connecteur
Desserrer la vis (17) et retirer l'anti-
13
traction (18) du boîtier connecteur
35
Page 36
7
8
9
5
4
3
2
1
6
(19)
(16)
Faire passer le câble (19) de la com-
(15)
(16)
(15)
(17)
(18)
(17)
(1) (2)
(1)
14
mande fournie par le client à travers le
boîtier connecteur
Souder par brasage les fils du câble
15
(19) aux broches 9 et 5 de l'insert de
connecteur (16) (voir également le
schéma de connexions du dévidoir)
Mettre l'insert de connecteur (16) en
16
place dans le boîtier connecteur et le
visser avec deux vis (15)
Mettre l'anti-traction (18) en place
17
dans le boîtier connecteur et le visser
à l'aide d'une vis (17)
Raccorder le connecteur au socle (9)
18
Étapes finales
REMARQUE!
Si le connecteur fourni n'est pas raccordé au socle (9), brancher la prise
borgne de la connexion (2) sur le socle
(9).
C'est la seule manière de garantir que
l'indice de protection IP de l'appareil soit
atteint.
Mettre en place la partie latérale (2)
1
Visser les 2 vis 5 x 14 mm (1) à l'aide
2
du tournevis TX 25
- Couple de serrage = 2,5 Nm
Replacer le dévidoir dans sa position
3
initiale
Mettre en place la bobine de fil ou la
4
bobine type panier
Rétablir la connexion avec les autres
5
composants périphériques
36
Page 37

VR 5000 Case D300
Sécurité
AVERTISSEMENT!
Risque en cas d'erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document doivent
▶
uniquement être exécutés par du personnel qualifié.
Le présent document doit être lu et compris.
▶
Toutes les instructions de service des composants périphériques, en particulier les
▶
consignes de sécurité, doivent être lues et comprises.
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner la mort ou des blessures graves.
Placer l'interrupteur secteur de la source de courant en position - O - et débrancher
▶
la source de courant du réseau.
S'assurer que tous les appareils et composants concernés ne peuvent pas être
▶
remis en marche.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure approprié,
▶
que les composants à charge électrique (condensateurs, par ex.) sont déchargés.
AVERTISSEMENT!
FR
Prescriptions
pour la sortie du
robot
Risque d'électrocution en cas de connexion de conducteur de terre insuffisante.
Cela peut entraîner des dommages corporels et matériels graves.
Toujours utiliser le nombre initial de vis originales du boîtier.
▶
ATTENTION!
Risque de blessure dû aux composants périphériques chauds.
Avant de débuter les travaux, laisser les composants périphériques refroidir à
température ambiante (+25 °C, +77 °F) notamment :
le réfrigérant ;
▶
les composants périphériques refroidis à l'eau ;
▶
le moteur entraînant le dévidoir.
▶
ATTENTION!
Risque au niveau du dévidoir en cas de surtension.
Cela peut entraîner des dommages matériels graves.
La sortie du robot pour l'option « signal de démarrage externe VR 5000 » doit être
▶
sans potentiel.
37
Page 38

Contenu de la liv-
(2)
(3)
(4)
(6)
(7)
(1)
(5)
(2)(1)
raison
(1) Connecteur
(2) 2 x écrous M4
(3) 2 x rondelles M4
(4) 2 x rondelles en éventail M4
(5) Prise borgne
(6) 2 x vis (2,9 mm x 16 mm)
(7) Faisceau de câbles avec socle
Non représenté :
- le présent document
Outillage nécessaire
Travaux de
préparation
Installer
l'option « Signal
de démarrage
externe »
- Tournevis cruciforme PH1
- Tournevis Torx TX 25
Débrancher toutes les connexions du dévidoir vers les autres composants
1
périphériques
Retirer la bobine de fil ou la bobine type panier du dévidoir
2
Placer le dévidoir sur un support adapté
3
Ouvrir le capot (1)
1
Retirer la fausse prise (2)
2
38
Page 39

(3)
Mettre la connexion (3) en place
9
5
4
3
2
(4)
8
(5)
(4)
(4)
(3)
9
5
4
3
2
(4)
8
(7)
(7)
(4)
3
comme indiqué sur l'illustration
Mettre le socle (4) en place de
4
manière à ce que les deux contacts
(5) se trouvent en bas (voir illustration)
- Faire passer le faisceau de
câbles du socle à l'intérieur de
l'appareil
Positionner le câble (6) de la prise
5
borgne fournie entre la connexion (3)
et le socle (4) comme illustré
FR
Visser le socle (4) à l'aide des vis four-
6
nies 2,9 mm x 16 mm (7)
ATTENTION!
Risque au niveau du dévidoir en cas de surtension.
Cela peut entraîner des dommages matériels graves.
La sortie du robot pour l'option « Signal de démarrage externe VR 5000 » doit être
▶
sans potentiel.
39
Page 40

(8) (8)(9) (8)(8)
Desserrer les vis (8) TX 25
1
(10)
1
(10)
1
(11)
(13)
(12)
(12)
(12)
7
Retirer le cache (9)
8
Desserrer les vis (10) TX 25
9
Retirer l'écran (11) du cadre du boîtier
10
Insérer le faisceau de câbles (12) du socle (4) jusqu'au connecteur X3 (13) comme
11
illustré
40
Page 41

(13)
Débrancher le connecteur X3 (13) du
(15) (14)
(16)(18) (17) (16)
(18)
(19)
12
circuit imprimé SRVT dans le dévidoir
Raccorder le câble X3:1 (14) du fais-
13
ceau de câbles (12) au connecteur X3
du circuit imprimé SRVT (selon l'illustration)
- Signal « Gun Trigger »
Raccorder le câble X3:6 (15) du fais-
14
ceau de câbles (12) au connecteur X3
du circuit imprimé SRVT (selon l'illustration)
- Signal « GND »
Brancher le connecteur X3 (13) à sa
15
position d'origine sur le circuit imprimé
SRVT
FR
Desserrer les vis (16) du connecteur
16
fourni et retirer l'insert de connecteur
(17) du boîtier connecteur
Desserrer la vis (18) et retirer l'anti-
17
traction (19) du boîtier connecteur
41
Page 42

7
8
9
5
4
3
2
1
6
(20)
(17)
Faire passer le câble (20) de la com-
(16)
(17)
(16)
(18)
(19)
(18)
(8) (8)(9) (8)(8)
18
mande fournie par le client à travers le
boîtier connecteur
Souder par brasage les fils du câble
19
(20) aux broches 9 et 5 de l'insert de
connecteur (17) (voir également le
schéma de connexions du dévidoir)
Mettre l'insert de connecteur (17) en
20
place dans le boîtier connecteur et le
visser avec deux vis (16)
Mettre l'anti-traction (19) en place
21
dans le boîtier connecteur et le visser
à l'aide d'une vis (18)
Raccorder le connecteur au socle (4)
22
REMARQUE!
Si le connecteur fourni n'est pas raccordé au socle (4), brancher la prise
borgne fournie sur le socle (4).
C'est la seule manière de garantir que
l'indice de protection IP de l'appareil soit
atteint.
Installer le cache (9) dans l'appareil
23
Visser les vis (8) TX 25
24
- Couple de serrage = 2,5 Nm
42
Page 43

1
(10)
1
(10)
1
(11)
Installer l'écran (11) dans l'appareil
(1)
25
Visser les vis (10) TX 25
26
- Couple de serrage = 2,5 Nm
FR
Étapes finales
Fermer le cache (1)
1
Replacer le dévidoir dans sa position
2
initiale
Mettre en place la bobine de fil ou la
3
bobine type panier
Rétablir la connexion avec les autres
4
composants périphériques
43
Page 44

FRONIUS INTERNATIONAL GMBH
Froniusstraße 1
A-4643 Pettenbach
AUSTRIA
contact@fronius.com
www.fronius.com
Under www.fronius.com/contact you will find the addresses
of all Fronius Sales & Service Partners and locations
 Loading...
Loading...