

Page 1
Operating
Instructions
Sistema de pruebas /i
Sistema de enderezamiento /i
Uređaj za ispitivanje /i
Uređaj za podešavanje /i
Equipamento de verificação /i
Equipamento de configuração /i
Test düzeneği /i
Ayar düzeneği /i
ES-MX
HR
PT-BR
TR
Manual de instrucciones
Upute za upotrebu
Manual de instruções
Kullanım kılavuzu
42,0410,2375 008-15062022
Page 2

Page 3
Contenido
Información general 5
General 7
Seguridad 7
General 7
Calibración del sistema de pruebas 7
Herramientas necesarias 8
Notas para pruebas y configuración 8
Opciones 8
Alcance del suministro 9
Sistema de pruebas/enderezamiento /i 9
Ámbito de entrega, sistema de pruebas /i G/W System 9
Ámbito de entrega, sistema de pruebas /i G/W V 10
Conjunto de fijación /i G/W TX 10
Sistema de enderezamiento /i 11
Compruebe la antorcha de robot MTB R 13
Compruebe la antorcha de robot MTB R con el sistema de pruebas/enderezamiento /i 15
Preparar la unidad de pruebas 15
Preparar el cuello de antorcha para pruebas 16
Comprobar el cuello de antorcha 17
Compruebe los sistemas completos de la antorcha de robot MTB R con el sistema de pruebas /i G/W System
General 18
Preparar el sistema de pruebas /i G/W System y el cuello de antorcha del sistema com-
pleto
Calibrar el sistema de pruebas /i G/W System 19
Verificar el sistema completo 20
Compruebe la antorcha de robot específica del cliente con el sistema de pruebas /i G/W 23
General 23
Preparar el sistema de pruebas /i G/W V y el cuello de antorcha 23
Calibrar el sistema de pruebas /i G/W V 25
Comprobar antorchas de robot de clientes específicos 26
Comprobar antorchas de robot TX con sistema de fijación /i G/W TX 27
General 27
Preparar la unidad de pruebas y el cuello de antorcha 27
Montar el conjunto de fijación /i G/W TX y la antorcha de robot TX en el sujetador del
cuello de antorcha
18
18
27
ES-MX
Configurar la antorcha de robot MTB R 29
Configurar la antorcha de robot 31
Preparar el cuello de antorcha para configuración 31
Configurar el cuello de antorcha 32
Tareas finales 34
Configure la antorcha de robot específica del cliente con el sistema de pruebas /i G/W V 35
General 35
Preparar el cuello de antorcha para configuración 35
Preparar el sistema de pruebas /i G/W V 36
Montar el sujetador del cuello de antorcha 36
Montar la unidad de pruebas 37
Configurar antorchas de robot de clientes específicos 37
3
Page 4

4
Page 5

Información general
5
Page 6

6
Page 7

General
ES-MX
Seguridad
Peligro por fallos del sistema y el trabajo que no es realizado de forma adecuada.
Puede resultar en lesiones graves y daños a la propiedad.
▶
▶
▶
General Sistema de pruebas /i
El sistema de pruebas /i es usado para comprobar las antorchas de robot MTB R
en busca de desviaciones dimensionales.
El sistema de pruebas /i está disponible en las siguientes configuraciones:
¡PELIGRO!
Todo el trabajo y las funciones que se describen en este documento deben
realizarse únicamente por personal calificado y capacitado.
Lea y entienda este documento.
Lea y entienda todo el Manual de instrucciones para los componentes del sistema, especialmente las normas de seguridad.
Sistema de pruebas/enderezamiento
44,0360,0073
para comprobar las antorchas de robot MTB R de gas y enfriadas con agua
Sistema de pruebas /i sistema G/W
44,0360,0090
para comprobar los sistemas completos de antorcha de robot (por ejemplo,
antorcha de soldadura con paquete de mangueras de robot, brida y caja de
apagado)
Calibración del
sistema de pruebas
Sistema de pruebas /i G/W V
44,0360,0012
para comprobar antorchas de robot específicas del cliente de gas y enfriadas
con agua y modelos especiales
Sistema de enderezamiento /i
44,0350,5241
Con el sistema de enderezamiento /i, las desviaciones dimensionales pueden ser
corregidas en las antorchas de robot MTB R.
¡IMPORTANTE! Para las desviaciones dimensionales > 5 mm, ya no debe configurar el cuello de antorcha por su propia cuenta. Envíe el cuello de antorcha a
Fronius para su reparación.
¡IMPORTANTE! Para obtener resultados óptimos con el sistema de pruebas /i, se
recomienda que el sistema sea calibrado por Fronius una vez al año.
7
Page 8

Herramientas
necesarias
Llave Allen de 6 mm
-
Llave para tubos de contacto
-
42,0410,0570 ... M6
42,0410,0138 ... M8x1.5
Llave plana de antorcha
-
45,0200,1261
Llave plana
-
42,0435,0090
Notas para pruebas y configuración
Opciones
¡OBSERVACIÓN!
Si es posible, use dos placas base diferentes para comprobar y configurar los
cuerpos de antorcha, por ejemplo:
Comprobando con el sistema de pruebas /i
▶
Configuración en placa base "profesional" de acero
▶
Placa base "profesional" de acero (42,0201,2064)
-
por ejemplo, para trabajo frecuente de pruebas y enderezamiento (sólo montaje en fábrica)
Eje de prueba (xx,xxxx,xxxx)
-
para comprobar el sistema de pruebas /i
Conjunto de fijación /i G/W TX (44,0350,5242)
-
para comprobar las antorchas de robot TX de gas y enfriadas con agua
8
Page 9
Alcance del suministro
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(10)
(8)
(9)
(14)
(13)
(12)
(11)
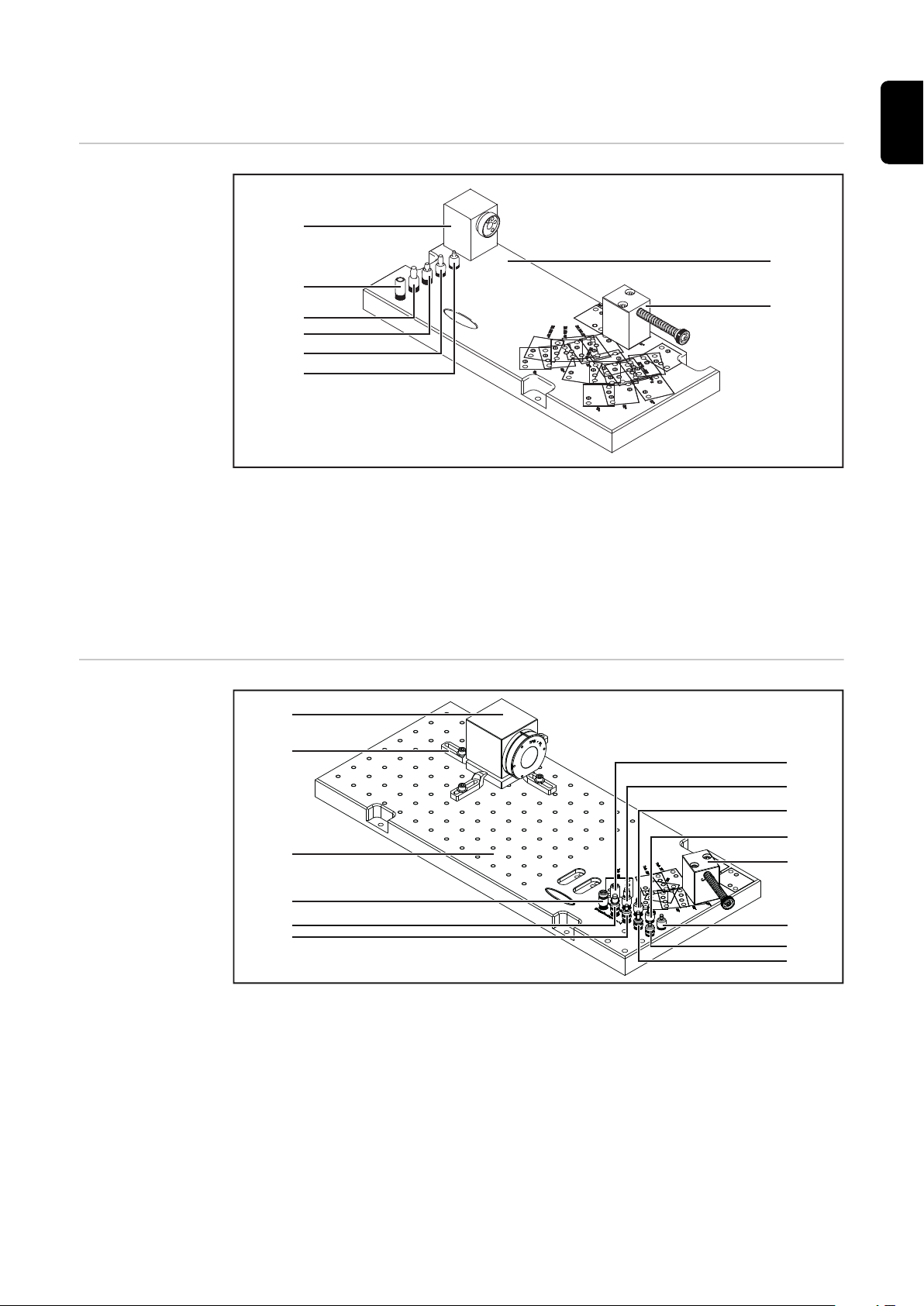
Sistema de pruebas/enderezamiento /i
ES-MX
Ámbito de entrega, sistema de
pruebas /i G/W
System
(1) Sujetador del cuello de antor-
cha
(2) Manga de centrado M6
(3) Manga de centrado M8
(4) Manga de centrado M8x1.5
(5) Manga de centrado M10x1.25
(6) Manga de centrado M10x1.25
Contec
(7) Aluminio de placa base
(8) Unidad de pruebas
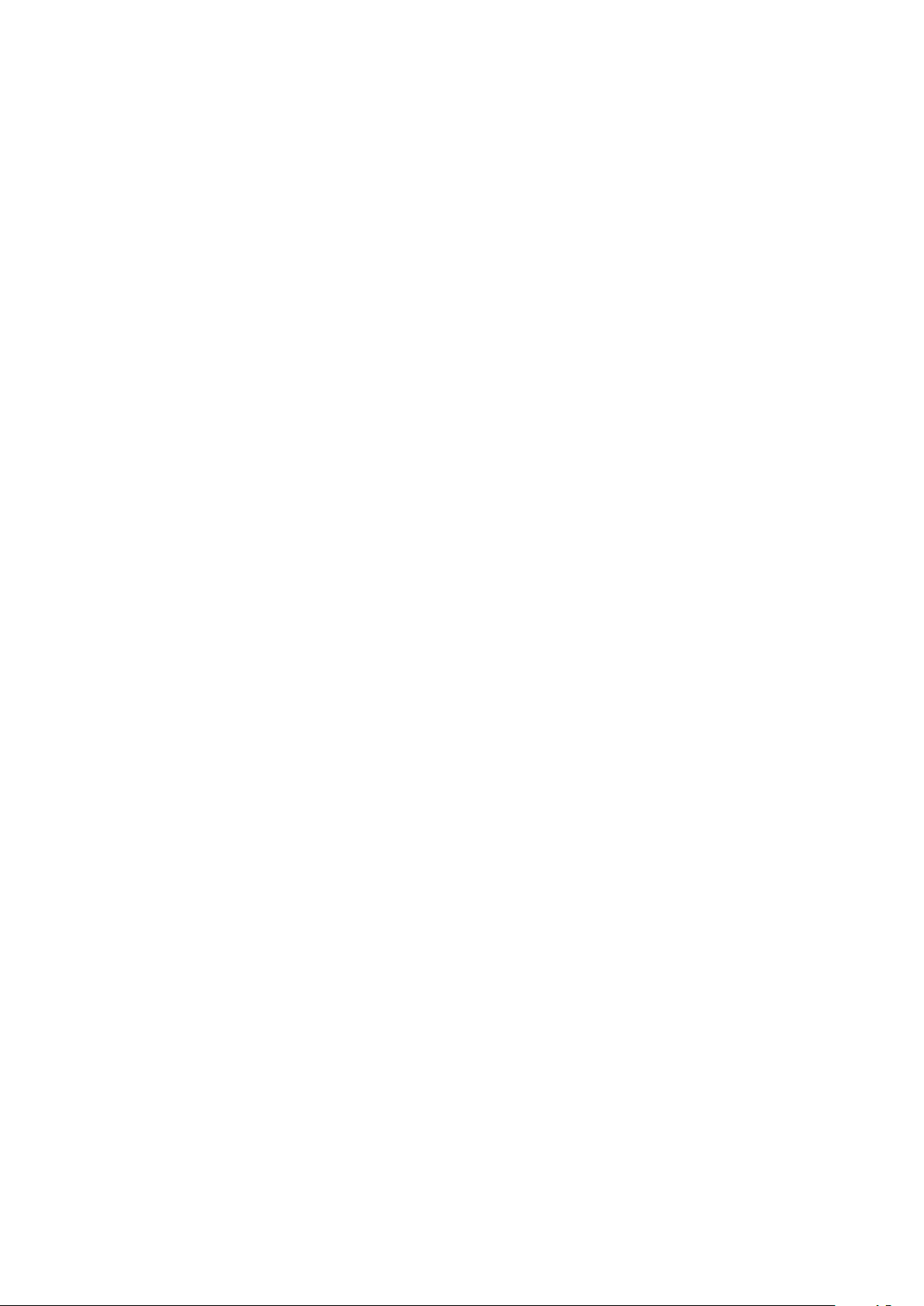
(1) Bloque de montaje
(2) 4 tornillos de brida
(3) Aluminio de placa base
(4) Manga de ajuste M10x1.25
Contec
(5) Manga de ajuste M10x1.25
(6) Manga de ajuste M8x1.5
(7) Manga de ajuste M8
(8) Manga de ajuste M6
(9) Manga de centrado M6
(10) Unidad de pruebas
(11) Manga de centrado M8
(12) Manga de centrado M8x1.5
(13) Manga de centrado M10x1.25
(14) Manga de centrado M10x1.25
Contec
9
Page 10

Ámbito de entre-
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(14)
(13)
(12)
(11)
(10)
(8)
(9)
(1) (2)(3)
(2)
*
**
ga, sistema de
pruebas /i G/W V
Conjunto de fijación /i G/W TX
(1) Sujetador del cuello de antor-
cha
(2) 4 tornillos de brida
(3) Aluminio de placa base
(4) Manga de ajuste M10x1.25
Contec
(5) Manga de ajuste M10x1.25
(6) Manga de ajuste M8x1.5
(7) Manga de ajuste M8
(8) Manga de ajuste M6
(9) Manga de centrado M6
(10) Unidad de pruebas
(11) Manga de centrado M8
(12) Manga de centrado M8x1.5
(13) Manga de centrado M10x1.25
(14) Manga de centrado M10x1.25
Contec
(1) Cojinete de brida
(2) 2 pernos de hombro 6h8
M5 x 20 mm
(3) Brida
* Cuello de antorcha
** Sujetador del cuello de antor-
cha
(incluido en el ámbito de entrega del sistema de pruebas)
10
Page 11

Sistema de end-
(1)
(2)
(3)
(4)
(5)
erezamiento /i
Sistema de enderezamiento /i - 44,0350,5241
(1) Palanca de enderezamiento
(2) Llave plana de torsión
(3) Tuerca de unión
(4) Llave plana de antorcha
(5) Copa de enderezamiento ø
16 mm
Copa de enderezamiento ø
18 mm
ES-MX
11
Page 12

12
Page 13

Compruebe la antorcha de robot
MTB R
13
Page 14
14
Page 15

Compruebe la antorcha de robot MTB R con el sistema de pruebas/enderezamiento /i
Preparar la unidad de pruebas
Nombre Longitud
(mm)
Longitud
(pulgadas)
La placa base del sistema de pruebas /i
contiene diversas posiciones para
montar la unidad de pruebas.
La unidad de pruebas está montada
previamente en la posición de montaje
de 0° al ser entregada.
Para cualquier otro cuello de antorcha
de 0°, la unidad de pruebas debe ser
montada en la placa base de acuerdo
con el cuello de antorcha de 0° de la
antorcha de soldadura que será probada:
Altura
(mm)
Altura
(pulgadas)
ES-MX
Ángulo
A 0° 250 9.842 0 0 0°
A 22° 241 9.488 50 1.969 22°
A 36° 224 8.819 86 3.386 36°
A 45° 209 8.228 107 4.213 45°
A1 0° 187.5 7.382 0 0 0°
A2 22° 246 9.685 27 1.063 22°
A2 45° 228.5 8.996 56.5 2.224 45°
A2 60° 212 8.346 71 2.795 60°
A3 36° 236 9.291 44.5 1.752 36°
B 0° 335 13.189 0 0 0°
B 22° 331 13.032 27 1.063 22°
B 45° 313.5 12.342 56.5 2.224 45°
B 60° 297 11.692 71 2.795 60°
B1 22° 291 11.457 50 1.969 22°
B2 22° 325 12.795 50 1.969 22°
B3 36° 338 13.307 0 0 36°
B4 36° 321 12.638 44.5 1.752 36°
C 22° 383 15.079 50 1.969 22°
C 36° 366 14.409 86 3.386 36°
C 45° 351 13.819 105 4.134 45°
15
Page 16

1
2
1
2
1
2
1
(1)
(2)
(3)
(4)
(5)
1
1
2
2
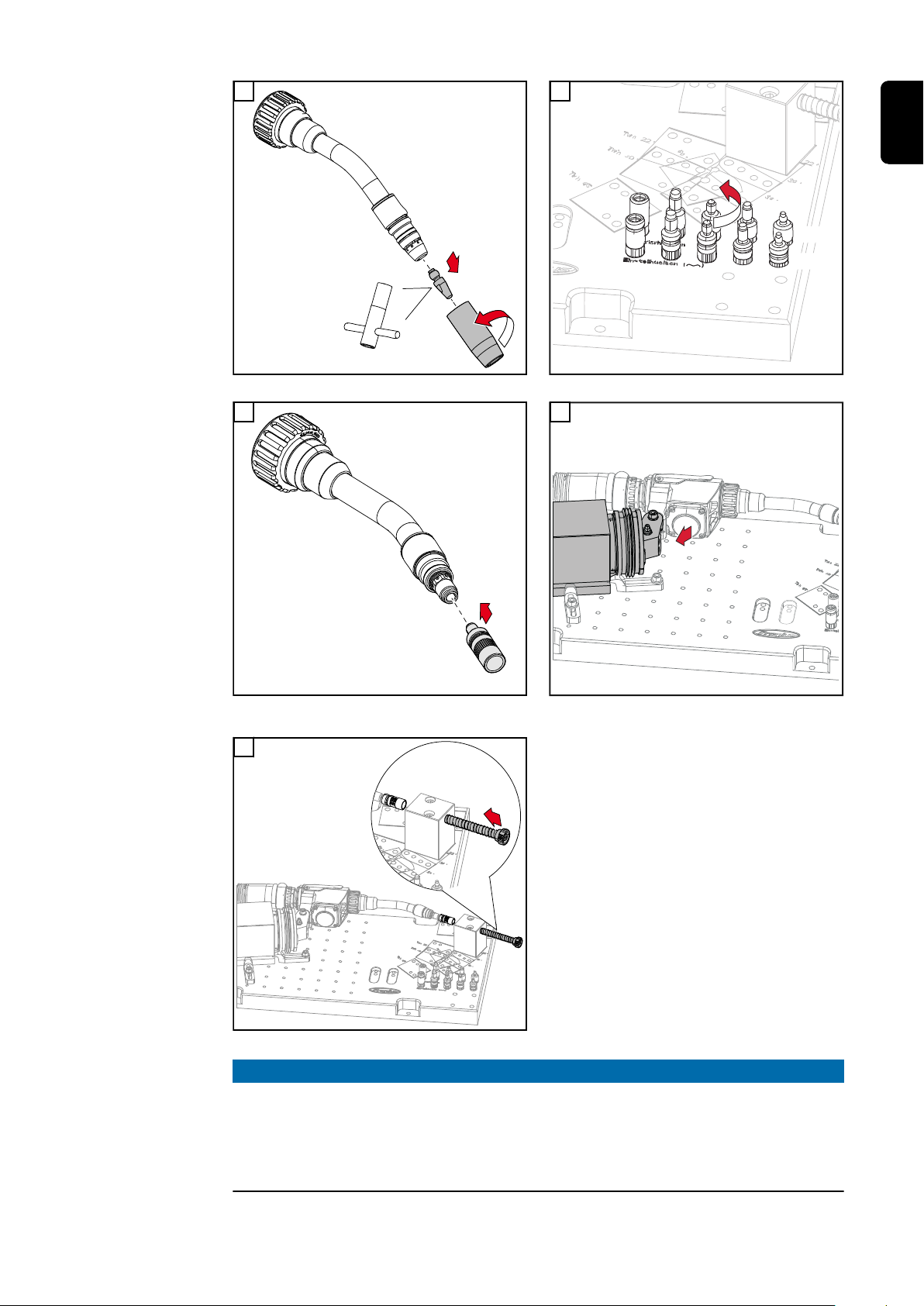
Preparar el cuello de antorcha
para pruebas
1
3
2
(1) ... M6 (2) ... M8 (3) ... M8x1.5 (4) ... M10x1.25
(5) ... M10x1.25 Contec
16
Page 17

Comprobar el
1
2
1
cuello de antorcha
1
¡OBSERVACIÓN!
El cuello de antorcha está bien si
El pasador se desliza completamente en la manga de centrado con facilidad
▶
El pasador se desliza fuera de la manga de centrado con facilidad después
▶
de que el resorte es liberado por la fuerza del resorte
2
ES-MX
Si el pasador no puede moverse con facilidad dentro o fuera de la manga de centrado, configure el cuello de antorcha de acuerdo con el capítulo "Configuración
de la antorcha de robot MTB R" (en la página 29).
¡IMPORTANTE! Para las desviaciones dimensionales > 5 mm, ya no debe configurar el cuello de antorcha por su propia cuenta. Envíe el cuello de antorcha a
Fronius para su reparación.
17
Page 18

Compruebe los sistemas completos de la antor-
1
2
2
1
cha de robot MTB R con el sistema de pruebas /i
G/W System
General Con el sistema de pruebas /i G/W System, puede comprobar sistemas completos
de antorcha de robot desde el cuello de antorcha hasta el anticolisión en busca
de desviaciones dimensionales.
El usuario es responsable de la configuración y el ajuste inicial.
Hay diversas posibilidades disponibles para pruebas, por ejemplo:
Cuello de antorcha
-
Cuello de antorcha + juego de cables
-
Cuello de antorcha + juego de cables + brida
-
Cuello de antorcha + juego de cables + brida + anticolisión
-
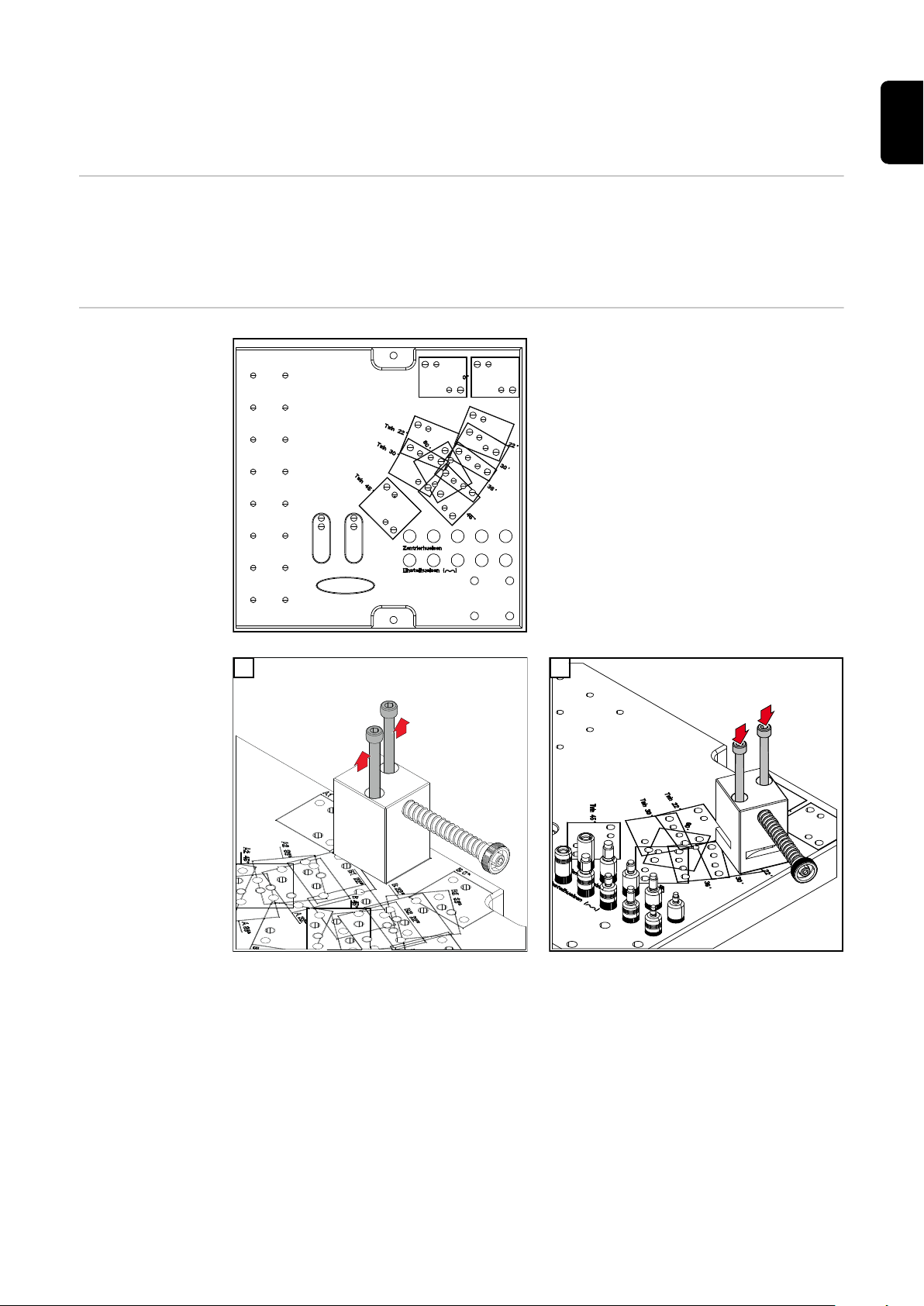
Preparar el sistema de pruebas /i G/W System y el cuello
de antorcha del
sistema completo
Compruebe el cuello de antorcha del sistema completo usando un sistema
1
de pruebas adecuado
La placa base del sistema de pruebas /i G/W contiene una amplia gama de posiciones para montar la unidad de pruebas.
La unidad de pruebas está montada previamente en la posición de montaje de 0°
al ser entregada.
Para cualquier otra curvatura del cuello de la antorcha, la unidad de pruebas debe ser montada en la placa base de acuerdo con la curvatura del cuello antorcha
de la antorcha de soldadura que será probada:
2
3
18
¡OBSERVACIÓN!
Para distinguir entre la manga de centrado (2) y la manga de ajuste (1), las mangas de ajuste están equipadas con dos ranuras cruzadas adicionales.
Page 19

(1)
(2)
1
4
1
1
min 15mm
min 0.59inch
1
1
1
1
2
1
Destornille la manga de ajuste
5
El bloque de montaje está diseñado para montar diversas cajas de apagado del
robot.
6
ES-MX
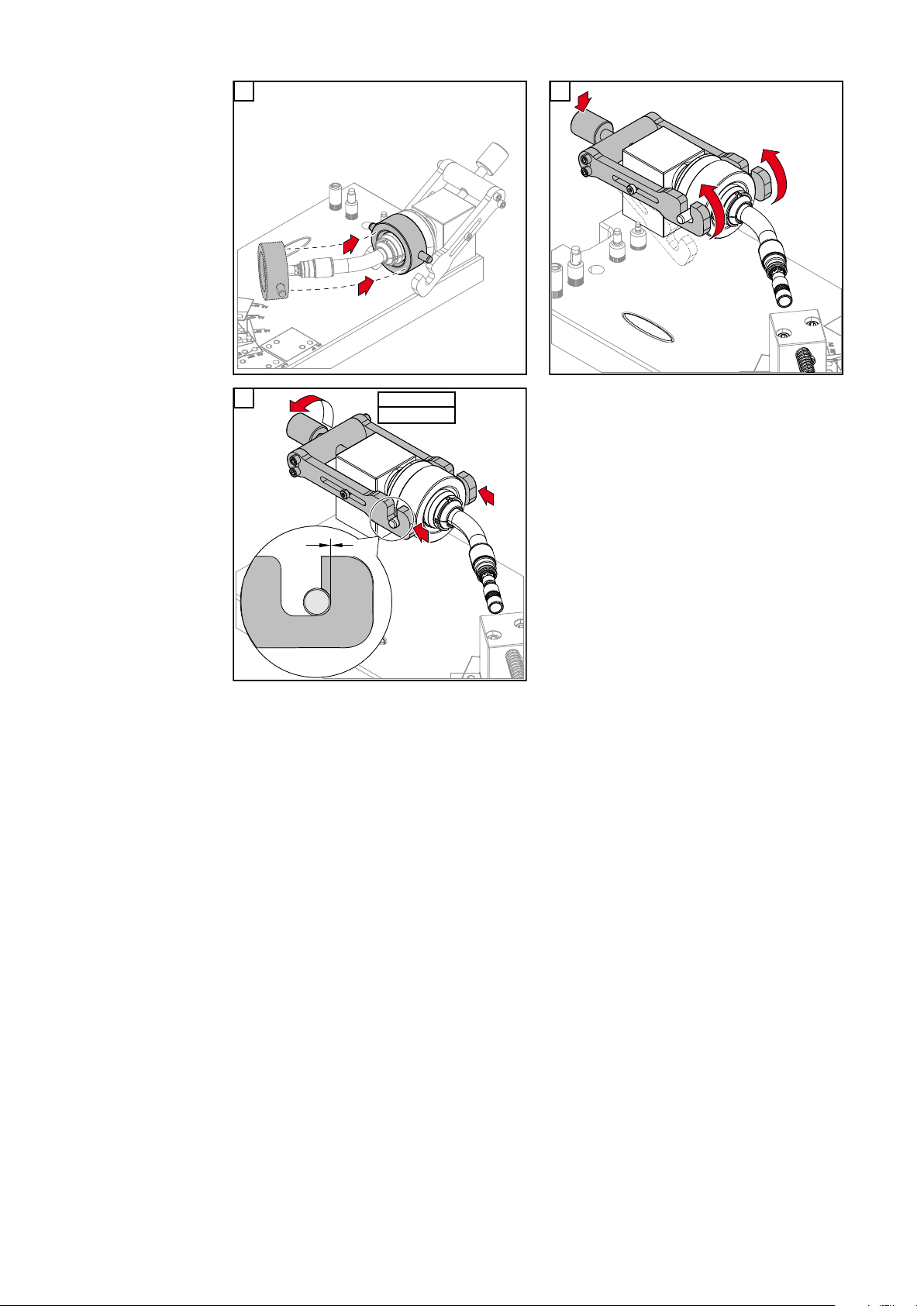
Calibrar el sistema de pruebas /i
G/W System
Monte el sistema completo en el bloque de montaje
1
2
19
Page 20

1
3
1
1
3
2
2
1
El pasador debe deslizarse completamente dentro de la manga de ajuste
con facilidad.
El pasador debe deslizarse fuera de la
manga de ajuste con facilidad después
de que el resorte es liberado por la fuerza del resorte.
Si el pasador no se desliza dentro de la
manga de ajuste o si lo hace con dificultad, el sistema completo con bloque de montaje debe ser reajustado.
Verificar el sistema completo
4
5
Si el pasador no se desliza dentro de la manga de ajuste o si lo hace con dificultad, el sistema completo con bloque de montaje debe ser reajustado.
¡OBSERVACIÓN!
El juego de cables debe ser liberado durante la comprobación.
Si el juego de cables no es liberado, la caja de apagado del robot puede estar mal
alineada.
¡OBSERVACIÓN!
Para distinguir entre la manga de centrado (2) y la manga de ajuste (1), las mangas de ajuste están equipadas con dos ranuras cruzadas adicionales.
20
Page 21
2
1
1
(1)
(2)
1
1
1
1
2
ES-MX
Destornille la manga de centrado.
3
4
Monte el sistema completo en el bloque de montaje
5
¡OBSERVACIÓN!
El sistema completo está bien si
el pasador se desliza completamente en la manga de centrado con facilidad
▶
y
el pasador se desliza fuera de la manga de centrado con facilidad después de
▶
que el resorte es liberado por la fuerza del resorte.
21
Page 22

Si el pasador no se desliza con facilidad dentro o fuera de la manga de centrado,
el sistema completo debe ser ajustado (por ejemplo, en la brida).
22
Page 23
Compruebe la antorcha de robot específica del
1
2
2
1
cliente con el sistema de pruebas /i G/W
General Con el sistema de pruebas /i G/W V, puede comprobar sistemas de antorcha de
robot de clientes específicos y modelos especiales en busca de desviaciones dimensionales.
El usuario es responsable de la configuración y el ajuste inicial.
Preparar el sistema de pruebas /i G/W V y el
cuello de antorcha
La placa base del sistema de pruebas /i
G/W V contiene diversas posiciones
para montar la unidad de pruebas.
La unidad de pruebas está montada
previamente en la posición de montaje
de 0° al ser entregada.
Para cualquier otro cuello de antorcha
de 0°, la unidad de pruebas debe ser
montada en la placa base de acuerdo
con el cuello de antorcha de 0° de la
antorcha de soldadura que será probada:
ES-MX
1
2
23
Page 24

2
1
3
(1)
(2)
1
1
1
2
¡OBSERVACIÓN!
Para distinguir entre la manga de centrado (2) y la manga de ajuste (1), las mangas de ajuste están equipadas con dos canales cruzados adicionales.
4
Destornille la manga de ajuste
6
5
24
Page 25

Calibrar el siste-
min 15mm
min 0.59inch
1
1
1
1
1
3
2
3
1
1
3
2
2
3
ma de pruebas /i
G/W V
1
2
ES-MX
3
El pasador debe deslizarse completamente dentro de la manga de ajuste
con facilidad.
El pasador debe deslizarse fuera de la
manga de ajuste con facilidad después
de que el resorte es liberado por la fuerza del resorte.
Si el pasador no se desliza dentro de la
manga de ajuste o si lo hace con dificultad, el sujetador del cuello de
antorcha con el cuello de antorcha debe ser reajustado.
4
5
Si el pasador no se desliza dentro de la manga de ajuste o si lo hace con dificultad, el sujetador del cuello de antorcha con el cuello de antorcha debe ser reajustado.
25
Page 26

Comprobar
2
1
(1)
(2)
1
1
antorchas de robot de clientes
específicos
1
¡OBSERVACIÓN!
Para distinguir entre la manga de centrado (2) y la manga de ajuste (1), las mangas de ajuste están equipadas con dos ranuras cruzadas adicionales.
2
Destornille la manga de centrado.
3
26
Page 27

Comprobar antorchas de robot TX con sistema de
1
2
1
fijación /i G/W TX
General El conjunto de fijación /i G/W TX es un complemento para comprobar las antor-
chas de robot TX y se usa en conjunto con los siguientes sistemas de pruebas:
Sistema de pruebas/enderezamiento /i (44,0360,0073)
-
Sistema de pruebas /i G/W V (44,0360,0012)
-
Las unidades de pruebas son ensambladas como se describe.
Después, el conjunto de fijación /i G/W TX y la antorcha de robot TX son montados en el sujetador del cuello de antorcha.
El proceso de pruebas después es llevado a cabo de acuerdo con el sistema de
pruebas respectivo.
Preparar la unidad de pruebas y
el cuello de
antorcha
Sistema de pruebas/enderezamiento /i
44,0360,0073
vea la página 15
vea la página 16
Sistema de pruebas /i G/W V
44,0360,0012
vea la página 23
ES-MX
Montar el conjunto de fijación /i G/W TX y
la antorcha de
robot TX en el
sujetador del
cuello de antorcha
1
2
27
Page 28
1
1
3
1
1
1
1
0
18
13.3
+
2Nm
-
1.5 ft·lb
+
-
4
5
¡Use la llave plana de torsión!
28
Page 29

Configurar la antorcha de robot
MTB R
29
Page 30

30
Page 31

Configurar la antorcha de robot
2
1
1
2
3
(1)
(2)
(3)
1
2
3
4
(1)
(2)
(3)
(4)
(5)
1
1
2
ES-MX
Preparar el cuello de antorcha
para configuración
1
3
2
4
Atornille el repuesto de porta tubos y la manga
de enderezamiento
5
Atornille la manga de centrado
Destornille la manga de centrado
(1) ... M6 (2) ... M8 (3) ... M8x1.5 (4) ... M10x1.25
(5) ... M10x1.25 Contec
31
Page 32

Configurar el
1
2
2
1
1
*
1
1
cuello de antorcha
Preparación:
1
3
2
* Las copas de enderezamiento sólo son necesarias para la configuración en el tubo exterior.
4
32
Para configurar el tubo exterior, empuje la palanca de enderezamiento sobre las copas de
enderezamiento
Coloque la palanca de enderezamiento sobre la
manga de enderezamiento
Configure el cuello de antorcha de manera horizontal y/o vertical:
5
Configuración horizontal
6
Configuración vertical
Page 33

2
1
7
1
8
ES-MX
Afloje la tuerca de unión y apriétela de nuevo
¡OBSERVACIÓN!
El cuello de antorcha está bien si
El pasador se desliza completamente en la manga de centrado con facilidad
▶
El pasador se desliza fuera de la manga de centrado con facilidad después
▶
de que el resorte es liberado por la fuerza del resorte
Si el pasador no se desliza con facilidad dentro o fuera de la manga de centrado,
el cuello de antorcha debe ser reajustado.
¡IMPORTANTE! Para las desviaciones dimensionales > 5 mm, ya no debe configurar el cuello de antorcha por su propia cuenta. Envíe el cuello de antorcha a
Fronius para su reparación.
Compruebe el cuello de antorcha
33
Page 34

Tareas finales Si el cuello de antorcha está bien:
Remueva la palanca de enderezamiento
1
Afloje la tuerca de unión
2
Remueva el cuello de antorcha del sistema de pruebas
3
Destornille la manga de enderezamiento del cuello de antorcha
4
Destornille la manga de centrado del cuello de antorcha
5
Remueva el repuesto de porta tubos
6
Monte las piezas de desgaste en el cuello de antorcha de acuerdo con el ma-
7
nual de instrucciones del cuello de antorcha
34
Page 35

Configure la antorcha de robot específica del cli-
2
1
1
2
3
(1)
(2)
(3)
1
2
3
4
1
*
ente con el sistema de pruebas /i G/W V
General El sistema de pruebas /i G/W V también está diseñado para configurar antorchas
de soldadura de clientes específicos.
Preparar el cuello de antorcha
para configuración
1
2
ES-MX
3
Atornille el repuesto de porta tubos y la manga
de enderezamiento
4
Destornille la manga de centrado
* Sujetador del cuello de antorcha no mostrado
35
Page 36

1
2
5
4
1
1
2
4
4
3
3
3
5
180°
1
3
2
2
2
2
4x
Atornille la manga de centrado
Preparar el sistema de pruebas /i G/W V
Montar el sujetador del cuello de
antorcha
1
1
36
Page 37

Montar la unidad
2
3
min 15mm
min 0.59inch
1
1
1
1
1
3
5
4
6
2
1
1
de pruebas
1
2
ES-MX
Configurar
antorchas de robot de clientes
específicos
Alinee la unidad de pruebas con el cuello antorcha y fíjela ligeramente con una brida
3
Fije la unidad de pruebas con las abrazaderas
de sujeción restantes
Compruebe el cuello de antorcha
4
Compruebe el cuello de antorcha
¡OBSERVACIÓN!
Para la configuración del cuello de antorcha
el sujetador del cuello de antorcha debe ser montado con cuatro tornillos en
▶
las mangas de ajuste/centrado en el sistema de pruebas /i G/W V,
la antorcha de soldadura debe estar montada en el sujetador del cuello de
▶
antorcha.
Configurar la antorcha de soldadura
1
La configuración de la antorcha de soldadura se describe en "Configurar el
cuello de antorcha" en la página32:
Configuración en el tubo exterior con las copas de enderezamiento
-
Configuración en el cuello de antorcha con la manga de enderezamiento
-
Configuración horizontal/vertical
-
Realice las tareas finales de acuerdo con lo indicado en la página 34
2
37
Page 38

38
Page 39

Sadržaj
Opće informacije 41
Općenito 43
Sigurnost 43
Općenito 43
Kalibriranje uređaja za ispitivanje 43
Potreban alat 44
Napomena za ispitivanje i podešavanje 44
Opcije 44
Opseg isporuke 45
Uređaj za ispitivanje / podešavanje /i 45
Opseg isporuke uređaja za ispitivanje /i sustava G/W 45
Opseg isporuke uređaja za ispitivanje /i G/W V 46
Komplet za učvršćivanje /i G/W TX 47
Uređaj za podešavanje /i 47
Ispitivanje robotskog gorionika za zavarivanje MTB R 49
HR
Ispitivanje robotskog gorionika za zavarivanje MTB R s pomoću uređaja za ispitivanje / podešavanje /i
Priprema jedinice za ispitivanje 51
Priprema tijela gorionika za ispitivanje 52
Ispitivanje tijela gorionika 53
Ispitivanje cjelokupnih sustava robotskih gorionika za zavarivanje MTB R s pomoću uređaja za
ispitivanje /i sustava G/W
Općenito 54
Priprema uređaj za ispitivanje /i sustava G/W i tijela gorionika cjelokupnog sustava 54
Namještanje uređaja za ispitivanje /i sustava G/W 55
Ispitivanje cjelokupnog sustava 56
Ispitivanje robotskih gorionika za zavarivanje prilagođenih korisniku s pomoću uređaja za ispitivanje /i G/W V
Općenito 58
Priprema uređaja za ispitivanje /i G/W V i tijela gorionika 58
Namještanje uređaja za ispitivanje /i G/W V 60
Ispitivanje robotskih gorionika za zavarivanje prilagođenih korisniku 61
Ispitivanje robotskih gorionika za zavarivanje TX s kompletom za učvršćivanje /i G/W TX 62
Općenito 62
Priprema jedinice za ispitivanje i tijela gorionika 62
Montaža kompleta za učvršćivanje /i G/W TX i robotskog gorionika za zavarivanje TX na
prihvat za tijelo gorionika
Podešavanje robotskog gorionika za zavarivanje MTB R 65
Podešavanje robotskog gorionika za zavarivanje 67
Priprema tijela gorionika za podešavanje 67
Podešavanje tijela gorionika 68
Završne radnje 70
Podešavanje robotskih gorionika za zavarivanje prilagođenih korisniku s pomoću uređaja za
ispitivanje /i G/W V
Općenito 71
Priprema tijela gorionika za podešavanje 71
Pripremanje uređaja za ispitivanje /i G/W V 72
Montaža prihvatnika za tijelo gorionika 72
Montaža jedinice za ispitivanje 73
Podešavanje robotskih gorionika za zavarivanje prilagođenih korisniku 73
51
54
58
62
71
39
Page 40

40
Page 41

Opće informacije
41
Page 42

42
Page 43

Općenito
Sigurnost
Opasnost uslijed nepravilnog rukovanja i neispravno izvedenih radova.
Posljedica mogu biti teške ozljede i materijalna šteta.
▶
▶
▶
Općenito Uređaj za ispitivanje /i
Uređaj za ispitivanje /i služi za ispitivanje odstupanja robotskog gorionika za zavarivanje MTB R.
Uređaj za ispitivanje /i dostupan je u sljedećim izvedbama:
UPOZORENJE!
Sve radove i funkcije opisane u ovom dokumentu smije obavljati samo educirano stručno osoblje.
S razumijevanjem pročitajte ovaj dokument.
S razumijevanjem pročitajte ove upute za upotrebu komponenti sustava, a
posebno sigurnosne propise.
Uređaj za ispitivanje/podešavanje /i
44,0360,0073
za ispitivanje robotskih gorionika za zavarivanje MTB R hlađenih plinom i vodom
Uređaj za ispitivanje /i sustava G/W
44,0360,0090
za ispitivanje cjelokupnih sustava robotskih gorionika za zavarivanje (npr.: gorionik za zavarivanje s paketom crijeva za robota, kliješta za pridržavanje i sklopka)
HR
Kalibriranje
uređaja za ispitivanje
Uređaj za ispitivanje /i G/W V
44,0360,0012
za ispitivanje robotskih gorionika za zavarivanje hlađenih plinom i vodom prilagođenih korisniku i posebnih izrada
Uređaj za podešavanje /i
44,0350,5241
S pomoću uređaja za podešavanje /i mogu se ispraviti odstupanja na robotskim
gorionicima za zavarivanje MTB R.
VAŽNO! U slučaju odstupanja > 5 mm tijelo gorionika nemojte sami namještati!
Pošaljite tijelo gorionika na popravak u tvrtku Fronius.
VAŽNO! Kako bi se postigli optimalni rezultati ispitivanja s pomoću uređaja za
ispitivanje /i, preporučuje se kalibriranje uređaja za ispitivanje /i jednom godišnje
u tvrtki Fronius.
43
Page 44

Potreban alat
ključ za šesterokutnu glavu vijka SW 6 mm
-
ključ kontaktne cijevi
-
42,0410,0570... M6
42,0410,0138... M8x1,5
ključ gorionika za zavarivanje
-
45,0200,1261
moment ključ
-
42,0435,0090.
Napomena za
ispitivanje i podešavanje
Opcije
NAPOMENA!
Za ispitivanje i podešavanje tijela gorionika upotrebljavajte dvije različite temeljne ploče, ako je moguće, primjerice:
ispitivanje s uređajem za ispitivanje /i
▶
podešavanje na temeljnoj čeličnoj ploči „Professional”.
▶
temeljna čelična ploča „Professional” (42,0201,2064)
-
npr. za česta ispitivanja i podešavanja (samo instalacija u tvornici)
ispitno vratilo (xx,xxxx,xxxx)
-
za ispitivanje uređaja za ispitivanje /i
komplet za učvršćivanje /i G/W TX (44,0350,5242)
-
za ispitivanje robotskih gorionika za zavarivanje TX hlađenih plinom i vodom
44
Page 45

Opseg isporuke
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(10)
(8)
(9)
(14)
(13)
(12)
(11)
Uređaj za ispitivanje / podešavanje /i
HR
Opseg isporuke
uređaja za ispitivanje /i sustava
G/W
(1) Prihvat za tijelo gorionika
(2) Čahura za centriranje M6
(3) Čahura za centriranje M8
(4) Čahura za centriranje M8x1,5
(5) Čahura za centriranje
M10x1,25
(6) Čahura za centriranje
M10x1,25 Contec
(7) Aluminijska temeljna ploča
(8) Jedinica za ispitivanje
45
Page 46

Opseg isporuke
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(14)
(13)
(12)
(11)
(10)
(8)
(9)
uređaja za ispitivanje /i G/W V
(1) Prihvatni blok
(2) 4 stezaljke s vijcima
(3) Aluminijska temeljna ploča
(4) Čahura za podešavanje
M10x1,25 Contec
(5) Čahura za podešavanje
M10x1,25
(6) Čahura za podešavanje
M8x1,5
(7) Čahura za podešavanje M8
(8) Čahura za podešavanje M6
(9) Čahura za centriranje M6
(10) Jedinica za ispitivanje
(11) Čahura za centriranje M8
(12) Čahura za centriranje M8x1,5
(13) Čahura za centriranje
M10x1,25
(14) Čahura za centriranje
M10x1,25 Contec
(1) Prihvat za tijelo gorionika
(2) 4 stezaljke s vijcima
(3) Aluminijska temeljna ploča
(4) Čahura za podešavanje
M10x1,25 Contec
(5) Čahura za podešavanje
M10x1,25
(6) Čahura za podešavanje
M8x1,5
(7) Čahura za podešavanje M8
(8) Čahura za podešavanje M6
(9) Čahura za centriranje M6
(10) Jedinica za ispitivanje
(11) Čahura za centriranje M8
(12) Čahura za centriranje M8x1,5
(13) Čahura za centriranje
M10x1,25
(14) Čahura za centriranje
M10x1,25 Contec
46
Page 47

Komplet za
(1) (2)(3)
(2)
*
**
(1)
(2)
(3)
(4)
(5)
učvršćivanje /i
G/W TX
(1) Električni utikač
(2) 2 montažna ramenska vijka 6h8
M5 x 20 mm
(3) Zatezni luk
Uređaj za podešavanje /i
* Tijelo gorionika
** Prihvat za tijelo gorionika
(u opsegu isporuke obuhvaćen
je uređaj za ispitivanje)
(1) Poluga za podešavanje
(2) Moment ključ
(3) Pokrivna matica
(4) Ključ gorionika za zavarivanje
(5) Obujmica za podešavanje ø
16 mm
Obujmica za podešavanje ø
18 mm
HR
Uređaj za podešavanje /i – 44,0350,5241
47
Page 48

48
Page 49

Ispitivanje robotskog gorionika za
zavarivanje MTB R
49
Page 50

50
Page 51

Ispitivanje robotskog gorionika za zavarivanje
MTB R s pomoću uređaja za ispitivanje / podešavanje /i
HR
Priprema jedinice za ispitivanje
Na temeljnoj ploči uređaja za ispitivanje /i nalaze se različiti položaji za montažu jedinice za ispitivanje.
U stanju isporuke jedinica za ispitivanje
unaprijed je montirana na položaj za
montažu 0°.
Za svaku drugu zakrivljenost tijela gorionika montirajte jedinicu za ispitivanje na temeljnu ploču u skladu sa zakrivljenošću tijela gorionika za zavarivanje koji se ispituje:
Opis Duljina
(mm)
A 0° 250 9.842 0 0 0°
A 22° 241 9.488 50 1.969 22°
A 36° 224 8.819 86 3.386 36°
Duljina (inč) Visina
(mm)
Visina (inč) Kut
A 45° 209 8.228 107 4.213 45°
A1 0° 187,5 7.382 0 0 0°
A2 22° 246 9.685 27 1.063 22°
A2 45° 228,5 8.996 56,5 2.224 45°
A2 60° 212 8.346 71 2.795 60°
A3 36° 236 9.291 44,5 1.752 36°
B 0° 335 13.189 0 0 0°
B 22° 331 13.032 27 1.063 22°
B 45° 313,5 12.342 56,5 2.224 45°
B 60° 297 11.692 71 2.795 60°
B1 22° 291 11.457 50 1.969 22°
B2 22° 325 12.795 50 1.969 22°
B3 36° 338 13.307 0 0 36°
B4 36° 321 12.638 44,5 1.752 36°
C 22° 383 15.079 50 1.969 22°
C 36° 366 14.409 86 3.386 36°
C 45° 351 13.819 105 4.134 45°
51
Page 52

1
2
1
2
1
2
1
(1)
(2)
(3)
(4)
(5)
1
1
2
2
Priprema tijela
gorionika za ispitivanje
1
3
2
(1)... M6 (2)... M8 (3)... M8 x 1,5 (4)... M10 x 1,25
(5)... M10 x 1,25 Contec
52
Page 53

Ispitivanje tijela
1
2
1
gorionika
1
NAPOMENA!
Tijelo gorionika je u redu ako
montažna igla nesmetano i u potpunosti prolazi u čahuru za centriranje i
▶
nakon otpuštanja opruge zbog opružne sile montažna igla opet nesmetano
▶
izlazi iz čahure za centriranje.
2
HR
Ako montažna igla ne ulazi nesmetano u čahuru za centriranje ili izlazi iz nje, podesite tijelo gorionika u skladu s uputama u poglavlju „Podešavanje robotskog gorionika za zavarivanje MTB R” (od stranice 65).
VAŽNO! U slučaju odstupanja > 5 mm tijelo gorionika nemojte sami namještati!
Pošaljite tijelo gorionika na popravak u tvrtku Fronius.
53
Page 54

Ispitivanje cjelokupnih sustava robotskih gorioni-
1
2
2
1
ka za zavarivanje MTB R s pomoću uređaja za ispitivanje /i sustava G/W
Općenito S pomoću uređaja za ispitivanje /i sustava G/W mogu se ispitati odstupanja cjelo-
kupnih sustava robotskih gorionika za zavarivanje od tijela gorionika do CrashBox.
Za montažu i prvo precizno podešavanje odgovoran je korisnik.
Za provjeru na raspolaganju su različite mogućnosti, npr.:
tijelo gorionika
-
tijelo gorionika + paket crijeva
-
tijelo gorionika + paket crijeva + kliješta za pridržavanje
-
tijelo gorionika + paket crijeva + kliješta za pridržavanje + CrashBox.
-
Priprema uređaj
za ispitivanje /i
sustava G/W i tijela gorionika
cjelokupnog
sustava
Ispitajte tijelo gorionika cjelokupnog sustava s pomoću odgovarajućeg uređaja
1
za ispitivanje.
Na temeljnoj ploči uređaja za ispitivanje /i sustava G/W nalaze se različiti položaji
za montažu jedinice za ispitivanje.
U stanju isporuke jedinica za ispitivanje unaprijed je montirana na položaj za montažu 0°.
Za svaku drugu zakrivljenost tijela gorionika montirajte jedinicu za ispitivanje na
temeljnu ploču u skladu sa zakrivljenošću tijela gorionika za zavarivanje koji se
ispituje:
2
3
54
NAPOMENA!
Kako biste razlikovali čahure za centriranje (2) i čahure za podešavanje (1), čahure za podešavanje imaju dva dodatna poprečna utora.
Page 55

(1)
(2)
1
4
1
1
min 15mm
min 0.59inch
1
1
1
1
2
1
Odvrnite čahuru za podešavanje
5
Prihvatni blok namijenjen je montaži različitih sklopki za robota.
6
HR
Namještanje
uređaja za ispitivanje /i sustava
G/W
Montirajte cjelokupni sustav na prihvatni blok
1
2
55
Page 56

1
3
1
1
3
2
2
1
Montažna igla mora nesmetano i u potpunosti prolaziti u čahuru za podešavanje.
Nakon otpuštanja opruge zbog
opružne sile montažna igla mora ponovno nesmetano izaći iz čahure za podešavanje.
Ako se montažna igla ne može uvući u
čahuru za podešavanje ili se teško uvlači, ponovno precizno podesite cjelokupni sustav s prihvatnim blokom.
Ispitivanje cjelokupnog sustava
4
5
Ako se montažna igla ne može uvući u čahuru za podešavanje ili se teško uvlači,
ponovno precizno podesite cjelokupni sustav s prihvatnim blokom.
NAPOMENA!
Paket crijeva ne smije biti pod opterećenjem tijekom ispitivanja.
Ako je paket crijeva pod opterećenjem, može doći do kvara na sklopci robota.
NAPOMENA!
Kako biste razlikovali čahure za centriranje (2) i čahure za podešavanje (1), čahure za podešavanje imaju dva dodatna poprečna utora.
56
Page 57

2
1
1
(1)
(2)
1
1
1
1
2
HR
Odvrnite čahuru za centriranje
3
4
Montirajte cjelokupni sustav na prihvatni blok
5
NAPOMENA!
Cijeli sustav je u redu ako:
montažna igla nesmetano i u potpunosti prolazi u čahuru za centriranje i
▶
nakon otpuštanja opruge zbog opružne sile montažna igla opet nesmetano
▶
izlazi iz čahure za centriranje.
Ako montažna igla ne ulazi nesmetano u čahuru za centriranje ili izlazi iz nje, podesite cijeli sustav (npr. na kliještima za pridržavanje).
57
Page 58

Ispitivanje robotskih gorionika za zavarivanje pril-
1
2
2
1
agođenih korisniku s pomoću uređaja za ispitivanje /i G/W V
Općenito S pomoću uređaja za ispitivanje /i G/W V mogu se ispitati odstupanja robotskih
gorionika za zavarivanje prilagođenih korisniku i posebnih izrada.
Za montažu i prvo precizno podešavanje odgovoran je korisnik.
Priprema
uređaja za ispitivanje /i G/W V i
tijela gorionika
Na temeljnoj ploči uređaja za ispitivanje /i G/W V nalaze se različiti položaji
za montažu jedinice za ispitivanje.
U stanju isporuke jedinica za ispitivanje
unaprijed je montirana na položaj za
montažu 0°.
Za svaku drugu zakrivljenost tijela gorionika montirajte jedinicu za ispitivanje na temeljnu ploču u skladu sa zakrivljenošću tijela gorionika za zavarivanje koji se ispituje:
1
2
58
Page 59

2
1
3
(1)
(2)
1
1
1
2
NAPOMENA!
Kako biste razlikovali čahure za centriranje (2) i čahure za podešavanje (1), čahure za podešavanje imaju dva dodatna poprečna utora.
HR
4
Odvrnite čahuru za podešavanje
6
5
59
Page 60

Namještanje
min 15mm
min 0.59inch
1
1
1
1
1
3
2
3
1
1
3
2
2
3
uređaja za ispitivanje /i G/W V
1
2
3
Montažna igla mora nesmetano i u potpunosti prolaziti u čahuru za podešavanje.
Nakon otpuštanja opruge zbog
opružne sile montažna igla mora ponovno nesmetano izaći iz čahure za podešavanje.
Ako se montažna igla ne može uvući u
čahuru za podešavanje ili se teško uvlači, ponovno precizno podesite prihvat
za tijelo gorionika s tijelom gorionika.
4
5
60
Ako se montažna igla ne može uvući u čahuru za podešavanje ili se teško uvlači,
ponovno precizno podesite prihvat za tijelo gorionika s tijelom gorionika.
Page 61

Ispitivanje ro-
2
1
(1)
(2)
1
1
botskih gorionika za zavarivanje
prilagođenih korisniku
1
HR
NAPOMENA!
Kako biste razlikovali čahure za centriranje (2) i čahure za podešavanje (1), čahure za podešavanje imaju dva dodatna poprečna utora.
2
Odvrnite čahuru za centriranje
3
61
Page 62

Ispitivanje robotskih gorionika za zavarivanje TX s
1
2
1
kompletom za učvršćivanje /i G/W TX
Općenito Komplet za učvršćivanje /i G/W TX je proširenje za ispitivanje robotskih gorionika
za zavarivanje TX i primjenjuje se u kombinaciji sa sljedećim uređajima za ispitivanje:
uređaj za ispitivanje/podešavanje /i (44,0360,0073)
-
uređaj za ispitivanje /i G/W V (44,0360,0012).
-
Jedinice za ispitivanje montiraju se kao što je opisano.
Nakon toga se montira komplet za učvršćivanje /i G/W TX i robotski gorionik za
zavarivanje TX na prihvat za tijelo gorionika.
Postupak ispitivanja zatim se provodi u skladu s odgovarajućim uređajem za ispitivanje.
Priprema jedinice za ispitivanje i
tijela gorionika
Montaža kompleta za
učvršćivanje /i
G/W TX i robotskog gorionika za
zavarivanje TX
na prihvat za tijelo gorionika
Uređaj za ispitivanje/podešavanje /i
44,0360,0073
pogledajte stranicu 51
pogledajte stranicu 52
1
Uređaj za ispitivanje /i G/W V
44,0360,0012
pogledajte stranicu 58
2
62
Page 63

1
1
3
1
1
1
1
0
18
13.3
+
2Nm
-
1.5 ft·lb
+
-
4
HR
5
Upotrijebite moment ključ!
63
Page 64

64
Page 65

Podešavanje robotskog gorionika za
zavarivanje MTB R
65
Page 66

66
Page 67

Podešavanje robotskog gorionika za zavarivanje
2
1
1
2
3
(1)
(2)
(3)
1
2
3
4
(1)
(2)
(3)
(4)
(5)
1
1
2
Priprema tijela
gorionika za podešavanje
1
2
HR
3
4
Zavrnite zamjenu za kontaktnu provodnicu i
čahuru za podešavanje
5
Zavrnite čahuru za centriranje
Odvrnite čahuru za centriranje
(1)... M6 (2)... M8 (3)... M8x1,5 (4)... M10x1,25
(5)... M10x1,25 Contec
67
Page 68

Podešavanje tije-
1
2
2
1
1
*
1
1
la gorionika
Priprema:
1
3
2
* Obujmice za podešavanje potrebne su samo za
podešavanje na vanjsku cijev.
4
68
Za podešavanje na vanjskoj cijevi gurnite polugu
za podešavanje preko obujmica za podešavanje
Pozicionirajte polugu za podešavanje iznad
čahure za podešavanje
Podesite tijelo gorionika vodoravno i/ili okomito:
5
vodoravno podešavanje
6
okomito podešavanje
Page 69

2
1
7
1
8
HR
Otpustite pokrivne matice i ponovno ih čvrsto
zategnite
NAPOMENA!
Tijelo gorionika je u redu ako
montažna igla nesmetano i u potpunosti prolazi u čahuru za centriranje i
▶
nakon otpuštanja opruge zbog opružne sile montažna igla opet nesmetano
▶
izlazi iz čahure za centriranje.
Ako montažna igla ne ulazi nesmetano u čahuru za centriranje ili izlazi iz nje, ponovno podesite tijelo gorionika.
VAŽNO! U slučaju odstupanja > 5 mm tijelo gorionika nemojte sami namještati!
Pošaljite tijelo gorionika na popravak u tvrtku Fronius.
Ispitivanje tijela gorionika
69
Page 70

Završne radnje Ako je tijelo gorionika u redu:
uklonite polugu za podešavanje
1
otpustite pokrivnu maticu
2
uklonite tijelo gorionika s uređaja za ispitivanje
3
odvrnite čahuru za podešavanje s tijela gorionika
4
odvrnite čahuru za centriranje s tijela gorionika
5
uklonite zamjenu za kontaktnu provodnicu
6
montirajte potrošne dijelove na tijelo gorionika u skladu s uputama za upotre-
7
bu gorionika za zavarivanje
70
Page 71

Podešavanje robotskih gorionika za zavarivanje
2
1
1
2
3
(1)
(2)
(3)
1
2
3
4
1
*
prilagođenih korisniku s pomoću uređaja za ispitivanje /i G/W V
Općenito Uređaj za ispitivanje /i G/W V osmišljen je i za podešavanje gorionika za zavari-
vanje prilagođenih korisniku.
HR
Priprema tijela
gorionika za podešavanje
1
3
2
4
Zavrnite zamjenu za kontaktnu provodnicu i
čahuru za podešavanje
Odvrnite čahuru za centriranje
* Prihvat za tijelo gorionika je skriven
71
Page 72

1
2
5
4
1
1
2
4
4
3
3
3
5
180°
1
3
2
2
2
2
4x
Zavrnite čahuru za centriranje
Pripremanje
uređaja za ispitivanje /i G/W V
Montaža prihvatnika za tijelo gorionika
1
1
72
Page 73

Montaža jedinice
2
3
min 15mm
min 0.59inch
1
1
1
1
1
3
5
4
6
2
1
1
za ispitivanje
1
2
HR
Podešavanje robotskih gorionika za zavarivanje
prilagođenih korisniku
Poravnajte jedinicu za ispitivanje s tijelom gorionika i lagano učvrstite s pomoću stezaljki.
3
Pričvrstite jedinicu za ispitivanje s pomoću preostalih stezaljki
Ispitajte tijelo gorionika
4
Ispitajte tijelo gorionika
NAPOMENA!
Za podešavanje gorionika za zavarivanje:
prihvat za tijelo gorionika mora biti montiran na uređaj za ispitivanje /i G/W V
▶
s pomoću 4 vijka u području čahura za podešavanje/centriranje,
gorionik za zavarivanje mora biti montiran na prihvat za tijelo gorionika.
▶
Podesite robotski gorionik za zavarivanje
1
Podešavanje gorionika za zavarivanje funkcionira kao što je opisano u poglavlju „Podešavanje tijela gorionika” od stranice 68:
podesite na vanjskoj cijevi s pomoću obujmice za podešavanje
-
podesite na završetak tijela gorionika s pomoću čahure za podešavanje
-
podesite vodoravno/okomito.
-
Izvršite završne radnje u skladu sa stranicom 70.
2
73
Page 74

74
Page 75

Índice
Informações gerais 77
Informações gerais 79
Segurança 79
Informações gerais 79
Calibrar o equipamento de verificação 79
Ferramentas necessárias 80
Nota sobre a verificação e a configuração 80
Opções 80
Escopo de fornecimento 81
Equipamento de verificação/configuração /i 81
Escopo de fornecimento do equipamento de verificação /i – sistema G/W 81
Escopo de fornecimento do equipamento de verificação /i – G/W V 82
Set de fixação /i – G/W TX 83
Equipamento de configuração /i 83
Verificar a tocha-robô MTB R 85
Verificar a tocha-robô MTB R com equipamento de verificação/configuração /i 87
Preparar unidade de verificação 87
Preparar o corpo da tocha de solda para a verificação 88
Verificar o corpo da tocha de solda 89
Verificar todo o sistema da tocha-robô MTB R com o equipamento de verificação /i – sistema
G/W
Informações gerais 90
Preparar o equipamento de verificação /i – sistema G/W e corpo da tocha de solda de to-
do o sistema
Ajustar o equipamento de verificação /i – sistema G/W 91
Verificar todo o sistema 92
Verificar a tocha-robô personalizada com o equipamento de verificação /i – G/W V 95
Informações gerais 95
Preparar o equipamento de verificação /i – G/W V e corpo da tocha de solda 95
Ajustar o equipamento de verificação /i – G/W V 97
Verificar a tocha-robô personalizada 98
Verificar a tocha-robô TX com o set de fixação /i – G/W TX 99
Informações gerais 99
Preparar a unidade de verificação e o corpo da tocha de solda 99
Montar o conjunto de fixação /i – G/W TX e a tocha-robô TX no registro do corpo da tocha
de solda
90
90
99
PT-BR
Configurar a tocha-robô MTB R 101
Configurar a tocha-robô 103
Preparar o corpo da tocha de solda para a configuração 103
Configurar o corpo da tocha de solda 104
Atividades concluídas 106
Configurar a tocha-robô personalizada com o equipamento de verificação /i – G/W V 107
Informações gerais 107
Preparar o corpo da tocha de solda para a configuração 107
Preparar o equipamento de verificação /i – G/W V 108
Montar o registro do corpo da tocha de solda 108
Montar a unidade de verificação 109
Configurar a tocha-robô personalizada 109
75
Page 76

76
Page 77

Informações gerais
77
Page 78

78
Page 79

Informações gerais
Segurança
Informações gerais
PERIGO!
Perigo devido a manuseio e trabalhos realizados incorretamente.
Podem ocorrer danos pessoais e materiais graves.
Todos os trabalhos e funções descritos neste documento só podem ser rea-
▶
lizados por pessoal especializado e treinado.
Este documento deve ser lido e entendido.
▶
Todos os manuais de instruções dos componentes do sistema, especialmente
▶
as diretrizes de segurança, devem ser lidos e compreendidos.
Equipamento de verificação /i
O equipamento de verificação /i serve para verificar tochas-robô MTB R quanto
aos desvios de nível.
O equipamento de verificação /i está disponível nas seguintes versões:
Equipamento de verificação/configuração /i
44,0360,0073
para verificar tochas-robô MTB R refrigeradas a gás e a água
Equipamento de verificação /i – sistema G/W
44,0360,0090
para verificar todos os sistemas de tocha-robô (por exemplo: tocha de solda
com jogo de mangueira do robô, clipe de retenção e caixa de desativação)
PT-BR
Calibrar o equipamento de verificação
Equipamento de verificação /i – G/W V
44,0360,0012
para verificar tochas-robô e produções especiais personalizadas refrigeradas a
gás e a água
Equipamento de configuração /i
44,0350,5241
Com a ajuda do equipamento de configuração /i, desvios de nível em tochas-robô
MTB R podem ser corrigidos.
IMPORTANTE! Em desvios de nível > 5 mm, não ajustar mais o corpo da tocha de
solda! Enviar o corpo da tocha de solda para a Fronius, para fins de reparação.
IMPORTANTE! Para obter os melhores resultados de verificação com o equipamento de verificação /i, recomenda-se que ele seja anualmente calibrado pela
Fronius.
79
Page 80

Ferramentas necessárias
Chave Allen SW 6 mm
-
Chave para tubos de contato
-
42,0410,0570 ... M6
42,0410,0138 ... M8x1,5
Chave da tocha
-
45,0200,1261
Chave de torque
-
42,0435,0090
Nota sobre a verificação e a configuração
Opções
AVISO!
Utilizar, na medida do possível, duas placas de base diferentes para a verificação e a configuração dos corpos da tocha de solda, por exemplo:
Verificação com o equipamento de verificação /i
▶
Configuração sobre a placa de base de aço „Profissional“
▶
Placa de base de aço „Profissional“ (42,0201,2064)
-
por exemplo para trabalhos comuns de verificação e configuração (apenas
para instalação na fábrica)
Eixo de configuração (xx,xxxx,xxxx)
-
para verificar o equipamento de verificação /i
Set de fixação /i – G/W TX (44,0350,5242)
-
para verificar tochas-robô TX refrigeradas a gás e a água
80
Page 81

Escopo de fornecimento
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(10)
(8)
(9)
(14)
(13)
(12)
(11)
Equipamento de
verificação/
configuração /i
PT-BR
Escopo de fornecimento do equipamento de verificação /i – sistema G/W
(1) Registro do corpo da tocha de
solda
(2) Bucha de centragem M6
(3) Bucha de centragem M8
(4) Bucha de centragem M8x1,5
(5) Bucha de centragem
M10x1,25
(6) Bucha de centragem
M10x1,25 Contec
(7) Placa de base de alumínio
(8) Unidade de verificação
81
Page 82

Escopo de forne-
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(14)
(13)
(12)
(11)
(10)
(8)
(9)
cimento do equipamento de verificação /i – G/W
V
(1) Bloco do alojamento
(2) 4 fixadores com parafusos
(3) Placa de base de alumínio
(4) Bucha de ajuste M10x1,25
Contec
(5) Bucha de ajuste M10x1,25
(6) Bucha de ajuste M8x1,5
(7) Bucha de ajuste M8
(8) Bucha de ajuste M6
(9) Bucha de centragem M6
(10) Unidade de verificação
(11) Bucha de centragem M8
(12) Bucha de centragem M8x1,5
(13) Bucha de centragem
M10x1,25
(14) Bucha de centragem
M10x1,25 Contec
(1) Registro do corpo da tocha de
solda
(2) 4 fixadores com parafusos
(3) Placa de base de alumínio
(4) Bucha de ajuste M10x1,25
Contec
(5) Bucha de ajuste M10x1,25
(6) Bucha de ajuste M8x1,5
(7) Bucha de ajuste M8
(8) Bucha de ajuste M6
(9) Bucha de centragem M6
(10) Unidade de verificação
(11) Bucha de centragem M8
(12) Bucha de centragem M8x1,5
(13) Bucha de centragem
M10x1,25
(14) Bucha de centragem
M10x1,25 Contec
82
Page 83

Set de fixação /i
(1) (2)(3)
(2)
*
**
(1)
(2)
(3)
(4)
(5)
– G/W TX
(1) Bucha de fixação
(2) 2 Parafusos de ajuste de cabeça
cilíndrica 6h8
M5 x 20 mm
(3) Braçadeira de fixação
* Corpo da tocha de solda
** Registro do corpo da tocha de
solda
(incluso no escopo de fornecimento do equipamento de verificação)
PT-BR
Equipamento de
configuração /i
(1) Alavanca de ajuste
(2) Chave de torque
(3) Porca da bucha
(4) Chave da tocha
(5) Concha de ajuste ø 16 mm
Concha de ajuste ø 18 mm
Equipamento de configuração /i – 44,0350,5241
83
Page 84

84
Page 85

Verificar a tocha-robô MTB R
85
Page 86

86
Page 87

Verificar a tocha-robô MTB R com equipamento
de verificação/configuração /i
Preparar unidade de verificação
Na placa de base do equipamento de
verificação /i existem diversas posições
para montar a unidade de verificação.
Na condição de remessa, a unidade de
verificação é pré-montada na posição
de montagem 0°.
Para qualquer outra curvatura do tubo
curvado, montar a unidade de verificação na placa base de acordo com a
curvatura do tubo curvado da tocha de
solda a ser verificada:
Denominação
A 0° 250 9.842 0 0 0°
A 22° 241 9.488 50 1.969 22°
A 36° 224 8.819 86 3.386 36°
Comprimento
(mm)
Comprimento (inch)
Altura
(mm)
Altura
(inch)
Cotovelo
PT-BR
A 45° 209 8.228 107 4.213 45°
A1 0° 187,5 7.382 0 0 0°
A2 22° 246 9.685 27 1.063 22°
A2 45° 228,5 8.996 56,5 2.224 45°
A2 60° 212 8.346 71 2.795 60°
A3 36° 236 9.291 44,5 1.752 36°
B 0° 335 13.189 0 0 0°
B 22° 331 13.032 27 1.063 22°
B 45° 313,5 12.342 56,5 2.224 45°
B 60° 297 11.692 71 2.795 60°
B1 22° 291 11.457 50 1.969 22°
B2 22° 325 12.795 50 1.969 22°
B3 36° 338 13.307 0 0 36°
B4 36° 321 12.638 44,5 1.752 36°
C 22° 383 15.079 50 1.969 22°
C 36° 366 14.409 86 3.386 36°
C 45° 351 13.819 105 4.134 45°
87
Page 88

1
2
1
2
1
2
1
(1)
(2)
(3)
(4)
(5)
1
1
2
2
Preparar o corpo
da tocha de solda para a verificação
1
3
2
(1) ... M6 (2) ... M8 (3) ... M8x1,5 (4) ... M10x1,25
(5) ... M10x1,25 Contec
88
Page 89

Verificar o corpo
1
2
1
da tocha de solda
1
AVISO!
O corpo da tocha de solda estará em ordem se
o pino de ajuste desliza suave e completamente para dentro da bucha de
▶
centragem e
o pino de ajuste, após a liberação da mola, desliza outra vez suavemente para
▶
fora da bucha de centragem, devido à força da mola.
2
PT-BR
Se o pino de ajuste não se mover suavemente para dentro ou para fora da bucha
de centragem, configurar o corpo da tocha de solda de acordo com o capítulo
„Configurar a tocha-robô do tubo curvado MIG/MAG R“ (a partir da página 101).
IMPORTANTE! Em desvios de nível > 5 mm, não ajustar mais o corpo da tocha de
solda! Enviar o corpo da tocha de solda para a Fronius, para fins de reparação.
89
Page 90

Verificar todo o sistema da tocha-robô MTB R
1
2
2
1
com o equipamento de verificação /i – sistema
G/W
Informações gerais
Preparar o equipamento de verificação /i – sistema G/W e corpo
da tocha de solda de todo o sistema
Com a ajuda do equipamento de verificação /i – sistema G/W, os sistemas completos da tocha-robô podem ser verificados quanto aos desvios de nível, do corpo
da tocha de solda até a crashbox.
O usuário é responsável pela instalação e ajuste inicial.
Existem diversas opções disponíveis para a verificação, por exemplo:
Corpo da tocha de solda
-
Corpo da tocha de solda + Jogo de mangueira
-
Corpo da tocha de solda + Jogo de mangueira + Clipe de retenção
-
Corpo da tocha de solda + Jogo de mangueira + Clipe de retenção + Crash-
-
Box
Verificar o corpo da tocha de solda de todo o sistema usando o equipamento
1
de verificação mais apropriado
Na placa de base do equipamento de verificação /i – sistema G/W existem diversas posições para montar a unidade de verificação.
Na condição de remessa, a unidade de verificação é pré-montada na posição de
montagem 0°.
Para qualquer outra curvatura do corpo da tocha de solda, montar a unidade de
verificação na placa base de acordo com a curvatura do corpo da tocha de solda
a ser verificada:
2
AVISO!
Para distinguir entre buchas de centragem (2) e buchas de ajuste (1), as buchas
de ajuste são equipadas com duas ranhuras transversais adicionais.
3
90
Page 91

(1)
(2)
1
4
1
1
min 15mm
min 0.59inch
1
1
1
1
2
1
Soltar a bucha de ajuste
5
O bloco de registro foi concebido para a montagem de diferentes caixas de desligamento do robô.
6
PT-BR
Ajustar o equipamento de verificação /i – sistema G/W
Montar todo o sistema no bloco de registro
1
2
91
Page 92

1
3
1
1
3
2
2
1
O pino de ajuste deve deslizar suave e
completamente para dentro da bucha
de ajuste.
O pino de ajuste, após a liberação da
mola, deve deslizar outra vez suavemente para fora da bucha de ajuste,
devido à força da mola.
Se o pino de ajuste não entrar ou apresentar dificuldade de entrar na bucha
de ajuste, reajustar todo o sistema com
o bloco de registro.
Verificar todo o
sistema
4
5
Se o pino de ajuste não entrar ou apresentar dificuldade de entrar na bucha de
ajuste, reajustar todo o sistema com o bloco de registro.
AVISO!
O jogo de mangueira deve estar descarregado durante a verificação.
Se o jogo de mangueira não estiver descarregado, pode ocorrer um mau funcionamento da caixa de desligamento do robô.
AVISO!
Para distinguir entre buchas de centragem (2) e buchas de ajuste (1), as buchas
de ajuste são equipadas com duas ranhuras transversais adicionais.
92
Page 93

2
1
1
(1)
(2)
1
1
1
1
2
PT-BR
Soltar a bucha de centragem
3
4
Montar todo o sistema no bloco de registro
5
AVISO!
Todo o sistema estará em ordem se
o pino de ajuste desliza suave e completamente para dentro da bucha de
▶
centragem e
o pino de ajuste, após a liberação da mola, desliza outra vez suavemente para
▶
fora da bucha de centragem, devido à força da mola.
93
Page 94

Se o pino de ajuste não se mover suavemente para dentro ou para fora da bucha
de centragem, configurar todo o sistema (por exemplo, no clipe de retenção).
94
Page 95

Verificar a tocha-robô personalizada com o equi-
1
2
2
1
pamento de verificação /i – G/W V
Informações gerais
Preparar o equipamento de verificação /i – G/W
V e corpo da tocha de solda
Com a ajuda do equipamento de verificação /i – G/W V, a tocha-robô e as produções especiais personalizadas podem ser verificadas quanto aos desvios de
nível.
O usuário é responsável pela instalação e ajuste inicial.
PT-BR
Na placa de base do equipamento de
verificação /i – G/W V existem diversas
posições para montar a unidade de verificação.
Na condição de remessa, a unidade de
verificação é pré-montada na posição
de montagem 0°.
Para qualquer outra curvatura do tubo
curvado, montar a unidade de verificação na placa base de acordo com a
curvatura do tubo curvado da tocha de
solda a ser verificada:
1
2
95
Page 96

2
1
3
(1)
(2)
1
1
1
2
AVISO!
Para distinguir entre buchas de centragem (2) e buchas de ajuste (1), as buchas
de ajuste são equipadas com duas ranhuras transversais adicionais.
4
Desparafusar a bucha de ajuste
6
5
96
Page 97

Ajustar o equipa-
min 15mm
min 0.59inch
1
1
1
1
1
3
2
3
1
1
3
2
2
3
mento de verificação /i – G/W V
1
2
PT-BR
3
O pino de ajuste deve deslizar suave e
completamente para dentro da bucha
de ajuste.
O pino de ajuste, após a liberação da
mola, deve deslizar outra vez suavemente para fora da bucha de ajuste,
devido à força da mola.
Se o pino de ajuste não entrar ou apresentar dificuldade de entrar na bucha
de ajuste, reajustar o registro do corpo
da tocha de solda com o corpo da tocha de solda.
4
5
Se o pino de ajuste não entrar ou apresentar dificuldade de entrar na bucha de
ajuste, reajustar o registro do corpo da tocha de solda com o corpo da tocha de
solda.
97
Page 98

Verificar a to-
2
1
(1)
(2)
1
1
cha-robô personalizada
1
AVISO!
Para distinguir entre buchas de centragem (2) e buchas de ajuste (1), as buchas
de ajuste são equipadas com duas ranhuras transversais adicionais.
2
Soltar a bucha de centragem
3
98
Page 99

Verificar a tocha-robô TX com o set de fixação /i –
1
2
1
G/W TX
Informações gerais
Preparar a unidade de verificação e o corpo
da tocha de solda
O set de fixação /i – G/W TX é uma extensão para a verificação de tochas-robô
TX e é utilizado em conjunto com os seguintes equipamentos de verificação:
Equipamento de verificação/configuração /i (44,0360,0073)
-
Equipamento de verificação /i – G/W V (44,0360,0012)
-
As unidades de verificação são estabelecidas conforme descrito.
Em seguida, o set de fixação /i – G/W TX e a tocha-robô TX são montados no registro do corpo da tocha de solda.
O procedimento de verificação, então, ocorre de acordo com o respectivo equipamento de verificação.
Equipamento de verificação/configuração /i
44,0360,0073
vide página 87
vide página 88
Equipamento de verificação /i – G/W
V
44,0360,0012
vide página 95
PT-BR
Montar o conjunto de fixação /i –
G/W TX e a tocha-robô TX no
registro do corpo
da tocha de solda
1
2
99
Page 100

1
1
3
1
1
1
1
0
18
13.3
+
2Nm
-
1.5 ft·lb
+
-
4
5
Usar a chave de torque!
100
 Loading...
Loading...