

Page 1

Fronius prints on elemental chlorine free paper (ECF) sourced from certified sustainable forests (FSC).
/ Perfect Charging / Perfect Welding / Solar Energy
Robacta W/CB-PAP
Installationsanleitung
DE
Installation instructions
EN
Instructions d'installation
FR
42,0410,1355 014-07022022
Page 2

Page 3

Inhaltsverzeichnis
Allgemeines 4
Allgemeines 4
Farbe einzelner Schlauchpaket-Komponenten 4
Lieferumfang 4
Anschlüsse 4
Aufbau-Übersicht 5
Maximale Achsrotation PAP 6
Optionen und Erweiterungen 6
Schlauchpaket Robacta W/CB-PAP montieren 7
Sicherheit 7
Vorbereitung 7
Anschluss Draht-Förderschlauch am VR 1500-PAP montieren 7
Roboter-Schlauchpaket Robacta W/CBPAP montieren 8
Halteschellen der Option Nahtsuchen montieren 9
Draht-Förderschlauch des Roboter-Schlauchpaketes am VR 1500-PAP anschließen 10
Übrige Komponenten des Roboter-Schlauchpaketes am VR 1500-PAP anschließen 11
Übrige Komponenten des Roboter-Schlauchpaketes an der Anschlusseinheit anschließen 11
Draht-Führungsseele montieren / wechseln 12
Sicherheit 12
Vorbereitung 12
Draht-Führungsseele montieren 13
Roboter-Schlauchpaket montieren 14
Abschließende Tätigkeiten 15
Position des VR 1500-PAP überprüfen 15
Technische Daten 16
Rohrbögen 16
Schlauchpakete 18
DE
3
Page 4

Allgemeines
(a)
(b)
(c)
(e)
(f)
(d)
(f)
(1) (2) (3) (4)
(5)(6)
Allgemeines Das Roboter-Schlauchpaket Robacta W/CB-PAP ist speziell für wassergekühlte Roboter-
Anwendungen konzipiert.
Das Schlauchpaket Robacta W/CB-PAP verbindet den Roboter-Drahtvorschub VR 1500PAP/W mit den wassergekühlten Roboter-Schweißbrennern der Serie Robacta und
verläuft im Roboterarm.
Farbe einzelner
SchlauchpaketKomponenten
Lieferumfang
WICHTIG! Die Farbe der einzelnen Schlauchpaket-Komponenten kann bei Auslieferung
von den Abbildungen in dieser Montageanleitung abweichen.
a) 1 x Stahl Draht-Führungsseele, blank,
1,2 mm
b) 1 x Roboter-Schlauchpaket Robacta
W/CB-PAP, wassergekühlt
c) 1 x Anschluss Draht-Förderschlauch
d) 1 x Spannstück 1,2 mm
e) 1 x Montageschlüssel
f) 1 x Drahtdüse, 1,2 mm, SW 10 mm
g) 2 x Halteschellen und 2 x Schrauben
der Option Nahtsuchen (werden nur
mit der Option Nahtsuchen mitgelie-
fert)
Lieferumfang Schlauchpaket Robacta W/ CB-PAP,
wassergekühlt
Anschlüsse
Anschlüsse am Schlauchpaket Robacta W/CB-PAP
(1) Wasser-Rücklauf (Schlauch mit
Steckanschluss)
(2) Schutzgas (Schlauch ohne Steck-
anschluss)
(3) Draht-Förderschlauch
(4) Kupplung für Robacta Rohrbogen
(5) Steuerleitung CrashBox
(6) Strom/Wasser-Vorlauf
4
Page 5

Aufbau-Übersicht
(1)
(9)
(8)
(7)
(6)
(5)
(4)(3)
(2)
(*)
(10)
DE
Aufbau-Übersicht
(1) Kühlgerät (z.B. FK 4000-R mit Option Strömungswächter)
(2) Stromquelle (z.B. TransPuls Synergic 5000) mit eingebauter Option VR-Control
intern
(3) Verbindungs-Schlauchpaket (Stromquelle - Kuppelstelle Roboter)
(4) Verlängerungs-Schlauchpaket mit Anschlusseinheit (Kuppelstelle Roboter -
VR1500-PAP)
(5) Aufnahme Drahtvorschub
(6) Roboter-Drahtvorschub VR 1500-PAP
(7) Roboter-Schlauchpaket Robacta W/CB-PAP
(8) CrashBox Robacta-PAP
(9) Roboter-Schweißbrenner Robacta
(10) Roboter
(*) Kuppelstelle Roboter
5
Page 6

Maximale Achsrotation PAP
Optionen und Erweiterungen
- Stahl Draht-Führungsseele, blank, für Draht Ø 0,8, 1,0 und 1,6 mm
- Drahtdüse für Draht Ø 0,8, 1,0 und 1,6 mm
- Kontaktrohr M8 für Draht Ø 0,8, 1,0, 1,4 und 1,6 mm
- Kontaktrohr M10 für Draht Ø 0,8 1,0, 1,4 und 1,6 mm
- Spannstück Ø 0,8 1,0 und 1,6 mm
6
Page 7

Schlauchpaket Robacta W/CB-PAP montieren
(1)(2)
DE
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen nur von
▶
technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses Gerätes
▶
und aller Systemkomponenten lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Personen- und Sachschäden können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und
▶
von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstel-
▶
len, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen
sind.
Vorbereitung
Anschluss DrahtFörderschlauch
am VR 1500-PAP
montieren
Roboter-Drahtvorschub VR 1500-PAP am Roboter montieren
1
WICHTIG! Zum nachträglichen Einrichten des Roboter-Drahtvorschubes die entspre-
chenden Schrauben noch nicht fest anziehen. Der VR 1500-PAP muss noch verschiebbar sein.
Anschlusseinheit des Verlängerungs-Schlauchpaketes am Roboter montieren
2
Roboterflansch und CrashBox Robacta-PAP am Roboter montieren
3
Überwurfmutter der CrashBox Robacta-PAP abschrauben
4
Detaillierte Arbeitsschritte zur Montage von Roboter-Drahtvorschub, Anschlusseinheit
des Verlängerungs-Schlauchpaketes und CrashBox finden Sie in den jeweiligen Bedienungs- oder Montageanleitungen.
1. Drahtdüse vom Anschluss DrahtFörderschlauch abschrauben
2. Anschluss Draht-Förderschlauch (1)
leicht in Roboter-Drahtvorschub VR
1500-PAP (2) einschrauben
Anschluss Draht-Förderschlauch in VR 1500-PAP
einschrauben
7
Page 8

Roboter-
(3)
(5)
(4)
)5()8(
(7) (6)
(9)
(9)(10)
Schlauchpaket
Robacta W/
CBPAP montieren
Schlauchpaket W/CB-PAP einfädeln
Schlauchpaket Robacta W/CB-PAP
1
(5) bei gerader 5. Roboterachse
einfädeln:
a) das Wasser/Strom-Kabel (3)
b) Schlauch Wasser-Rücklauf, rot
(4)
c) alle anderen Schlauchpaket-Kom-
ponenten
Roboter-Schlauchpaket Robacta
2
W/CB-PAP (5) so einrichten, dass die
Passfeder (6) in der vorgesehenen
Ausnehmung (7) am Gewinde der
CrashBox (8) positioniert ist
Nur bei Verwendung der Option Nahtsuchen:
WICHTIG! Bei der Montage des
Schlauchpakets darauf achten, dass
das Kabel der Option Nahtsuchen
nicht beschädigt wird.
Roboter-Schlauchpaket einrichten
Isolierring abschrauben
Überwurfmutter und Isolierring aufschrauben
Isolierring (9) vom Schlauchpaket ab-
3
schrauben
Überwurfmutter (10) der CrashBox
4
und Isolierring (9) aufschrauben
8
Page 9

Überwurfmutter festziehen
(1)
(2)
Überwurfmutter der CrashBox mittels
5
Montageschlüssel festziehen
DE
Halteschellen der
Option Nahtsuchen montieren
Stecker der Option Nahtsuchen (1)
1
wie abgebildet bündig in die Halteschelle reindrücken
Kabel der Option Nahtsuchen in die
2
dafür vorgesehene Nut in der Halteschelle (2) drücken
Halteschellen von beiden Seiten auf
3
die CrashBox aufsetzen
9
Page 10

(3)
(3)
Halteschellen mittels Schrauben (3)
(11)
(12)
(1)
~ 1 - 5 mm
(1)
(12)
4
festschrauben
Draht-Förderschlauch des Roboter-Schlauchpaketes am VR
1500-PAP anschließen
VR 1500-PAP einrichten
VR 1500-PAP nach vorne schieben,
1
bis der Abstand zwischen Anschlag
(11) des Anschluss Draht-Förderschlauch (1) und der Draht-Förderschlauch des Roboter-Schlauchpaketes (12) ca. 1 - 5 mm beträgt
VR 1500-PAP fixieren: Schrauben für
2
die Drahtvorschub-Montage festziehen
Draht-Förderschlauch (12) am An-
3
schluss Draht-Förderschlauch (1) aufschrauben
WICHTIG! Den Draht-Förderschlauch (12)
mittels Gabelschlüssel SW 10 mm fixieren
und den Anschluss Draht-Förderschlauch
(1) drehen.
10
VR 1500-PAP einrichten
Draht-Förderschlauch (12) und An-
4
schluss Draht-Förderschlauch (1) mittels 2 Gabelschlüsseln SW 10 mm fest
bis Anschlag zusammenschrauben
Page 11

Übrige Kompo-
(14)
(13)
(15)
(16)
(17)
(16)
nenten des Roboter-Schlauchpaketes am VR
1500-PAP anschließen
Gasschlauch und CrashBox-Steuerleitung anschließen
Schutzgas-Schlauch (ohne Steckan-
1
schluss) des Roboter-Schlauchpaketes (13) am VR 1500-PAP anstecken
Steuerleitung der CrashBox (14) am
2
VR 1500-PAP anschließen
DE
Übrige Komponenten des Roboter-Schlauchpaketes an der Anschlusseinheit
anschließen
Kabel für Strom/Wasser-Vorlauf anschließen
Kabel für Strom/Wasser-Vorlauf (15)
1
an der Anschlusseinheit des Verlängerungs-Schlauchpaketes (16) anschließen
Kabel für Strom/Wasser-Vorlauf (15)
2
mittels Rohrzange festziehen
Schlauch für Wasser-Rücklauf (mit
3
Steckanschluss) (17) an der Anschlusseinheit des VerlängerungsSchlauchpaketes (16) anschließen
Schlauch für Wasser-Rücklauf anschließen
11
Page 12

Draht-Führungsseele montieren / wechseln
(1)(2)
(3)
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen nur von
▶
technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses Gerätes
▶
und aller Systemkomponenten lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Personen- und Sachschäden können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und
▶
von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstel-
▶
len, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen
sind.
Vorbereitung
Überwurfmutter und Isolierring abschrauben
Rohrbogen montieren
Isolierring (1) abschrauben
1
Überwurfmutter (2) der CrashBox ab-
2
schrauben
Robacta Rohrbogen (3) ohne
3
Gasdüse und Kontaktrohr montieren
12
Page 13

(4)
Überwurfmutter lösen
(5)
(6)
(7)
(8)
Roboter-Schlauchpaket nach vorne ziehen
Überwurfmutter (4) am Anschluss
4
Draht-Förderschlauch lösen
Roboter-Schlauchpaket nach vorne
5
herausziehen, bis der Anschluss
Draht-Förderschlauch (5) aus dem VR
1500-PAP (6) kommt.
DE
Draht-Führungsseele montieren
Draht-Führungsseele einführen
Draht-Führungsseele (7) von vorne in
1
das Roboter-Schlauchpaket einführen
Draht-Führungsseele mit dem Kon-
2
taktrohr (8) nach hinten schieben
Kontaktrohr (8) aufschrauben
3
Kontaktrohr (8) mittels Montage-
4
schlüssel festziehen
Kontaktrohr montieren
13
Page 14
(7)
~ 2 mm
(5)
Draht-Führungsseele ablängen
(5)(9) (5a)
(6) (5)
)01()31( (12) (11)
Draht-Führungsseele ca. 2 mm nach
5
dem Anschluss Draht-Förderschlauch
(5) ablängen
Sicherstellen, dass sich auf der ab-
6
gelängten Draht-Führungsseele kein
Grat befindet
Draht-Führungsseele fixieren:
7
Drahtdüse (9) mittels 2 Gabelschlüssel SW 10 mm auf das
Spannstück (5a) aufschrauben. Das
Spannstück (5a) ist bei Auslieferung
am Anschluss Draht-Förderschlauch
(5) montiert.
RoboterSchlauchpaket
montieren
Drahtdüse aufschrauben
Anschluss Draht-Förderschlauch in VR 1500-PAP/W
einführen
Roboter-Schlauchpaket so weit nach
1
vorne ziehen, dass der Anschluss
Draht-Förderschlauch (5) wieder in
den VR 1500-PAP (6) eingeführt werden kann.
Draht-Förderschlauch (5) in den VR
2
1500-PAP (6) einführen
Roboter-Schlauchpaket Robacta
3
W/CB-PAP (10) so einrichten, dass die
Passfeder (11) in der vorgesehenen
Ausnehmung (12) am Gewinde der
CrashBox (13) positioniert ist
14
Roboter-Schlauchpaket einrichten
Page 15

(4) (5)(6)
Überwurfmutter festziehen
(1)(2)
(3) (14)
Überwurfmutter (4) des Anschluss
4
Draht-Förderschlauch (5) mittels Montageschlüssel am VR 1500-PAP (6)
festziehen
DE
Abschließende
Tätigkeiten
Überwurfmutter und Isolierring aufschrauben
Rohrbogen und Gasdüse montieren
Robacta Rohrbogen abmontieren
1
Überwurfmutter (2) der CrashBox und
2
Isolierring (1) aufschrauben
Überwurfmutter (2) der CrashBox mit-
3
tels Montageschlüssel festziehen
Robacta Rohrbogen (3) montieren
4
Gasdüse (14) montieren
5
Position des VR
1500-PAP
überprüfen
WICHTIG! Vor Inbetriebnahme die Montage-Position des Roboter-Drahtvorschubes VR
1500-PAP überprüfen:
- bei angeschlossenem Roboter-Schlauchpaket Robacta W/CB-PAP und
- bei Bewegung des Roboters.
Der VR 1500-PAP muss bei jeder Roboterachsen-Bewegung fest montiert sein und darf
keinerlei Bewegungen durchführen.
Bewegt sich der VR 1500-PAP bei Roboterachsen-Bewegungen mit, die Montageposition des VR 1500-PAP nachjustieren.
Wipp-Bewegungen z.B. sind ein Anzeichen dafür, dass der VR 1500-PAP zu weit hinten
montiert wurde. In diesem Fall die Montageposition des VR 1500-PAP nach vorne in
Richtung CrashBox korrigieren.
15
Page 16

Technische Daten
Ø
Ø
Ø
Rohrbögen Symbolerklärung:
wassergekühlt
X Einschaltdauer in %
ED* Einschaltdauer
X / I
M21 (EN 439)
X / I
C1 (EN 439)
(10 min / 40°C)
max
(10 min / 40°C)
max
I
max
(M6) mit Kontaktrohr M6
(M8) mit Kontaktrohr M8
Spannungsbemessung (V-Peak):
- für maschinellgeführte Schweißbrenner: 141 V
Das Produkt entspricht den Anforderungen laut Norm IEC 60974-7.
Robacta 160 Robacta 280 Robacta 300 Robacta 400
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
max. Schweißstrom in A
Elektrodendurchmesser
-
100 / 160
-
100 / 160
-
100 / 280
-
100 / 280
-
100 / 350
-
100 / 350
-
100 / 250 (M6);
400 (M8)
-
100 / 250 (M6);
400 (M8)
X / I
M21 (EN 439)
X / I
C1 (EN 439)
(10 min / 40°C)
max
(10 min / 40°C)
max
[mm]
[in.]
Robacta 500 Robacta 700 Robacta 700
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
0,8 - 1,2
.031 - .047
-
100 / 500
-
100 / 500
0,8 - 1,6
.031 - .063
0,8 - 1,2
.031 -. 047
-
100 / 700
-
100 / 700
1,0 - 1,6
.039 - .063
0,8 - 1,2
.031 - .047
TIME
-
100 / 700
-
100 / 700
1,0 - 1,6
.039 - .063
0,8 - 1,2
.031-.047
Robacta 2500
-
100 / 250
-
100 / 250
0,8 - 1,2
.031-.047
16
Page 17

Ø
Ø
Ø
Ø
X / I
(10 min / 40°C)
max
M21 (EN 439)
Robacta 5000 Robacta 7000 Rob. 500-M
(Con-Drive)
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 500
-
100 / 700
-
100 / 500
Laser HD/W
-
100 / 250
DE
X / I
(10 min / 40°C)
max
C1 (EN 439)
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
M21 (EN 439)
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 500
0,8 - 1,6
.031 - .063
Robacta Twin
Single 300
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 300
0,8 - 1,6
.031 - .063
Robacta Twin
900 Compact
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 900
(2x450)
-
100 / 700
1,0 - 1,6
.039 - .063
Robacta Twin
500
-
100 / 500
(2x250)
1,0 - 1,6
.039 - .063
Robacta Twin
Compact PRO
-
100 / 900
(2x450)
-
100 / 500
0,8 - 1,6
.031 - .063
Robacta Twin
600
-
100 / 600
(2x300)
0,8 - 1,6
.031 - .063
-
100 / 250
1,0 - 1,6
.039 - .063
Robacta Twin
900
-
100 / 900
(2x450)
1,0 - 1,6
.039 - .063
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
C1 (EN 439)
[mm]
[in.]
1,0 - 1,6
.039 - .063
1,0 - 1,6
.039 - .063
MTB 500i W/R MTB 330i W/R MTB 500d W/R MTB 330d W/R
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / ED* 500
-
100 / ED* 500
1,0 - 1,6
.039 - .063
-
100 / ED* 330
-
100 / ED* 330
0,8 - 1,6
.032 -. 063
-
100 / ED* 500
-
100 / ED* 500
1,0 - 1,6
.039 - .063
-
100 / ED* 330
-
100 / ED* 330
0,8 - 1,6
.031-.063
17
Page 18

Schlauchpakete Symbolerklärung:
Ø
Ø
wassergekühlt
Schlauchpaket-Länge
X Einschaltdauer in %
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
C1 (EN 439)
I
max
max. Schweißstrom in A
Elektrodendurchmesser
* geringste Kühlleistung laut Norm IEC 60974-2,
abhängig von der Schlauchpaket-Länge
Spannungsbemessung (V-Peak): 141 V
Das Produkt entspricht den Anforderungen laut Norm IEC 60974-7.
Robacta Robacta W/CB-PAP
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 700
-
100 / 700
0,8 - 1,6
.031 - .063
-
100 / 500
-
100 / 500
0,8 - 1,6
.031 - .063
[m] ([W])
[m] ([W])
P
*
min
[m] ([W])
[m] ([W])
[m] ([W])
[m] ([W])
1,20 (1100) / 1,50 (1300) /
1,75 (1400) / 2,50 (1400) /
3,5 (1700) / 4,5 (2100)
1,19 (550) / 1,30 (550) / 1,33 (550) /
1,38 (550) / 1,39 (600) / 1,41 (600) /
1,43 (600) / 1,44 (600) / 1,46 (600) /
1,48 (600) / 1,51 (600) / 1,59 (650) /
1,60 (650) / 1,65 (650) / 1,67 (650) /
1,68 (650) / 1,72 (650) / 1,80 (700)
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
Q
min
[L/min]
[gal./min]1.26 [US]
P
min
[bar]
[psi.]
Q
min
[bar]
[psi.]
3.90 (1100) / 4.92 (1300) /
5.74 (1400) / 8.20 (1400) /
11.4 (1700) / 14.7 (2100)
3
43
5,5
79.74
3.9 (550) / 4.2 (550) / 4.3 (550) /
4.5 (550) / 4.5 (600) / 4.6 (600) /
4.7 (600) / 4.7 (600) / 4.7 (600) /
4.8 (600) / 4.9 (600) / 5.2 (650) /
5.2 (650) / 5.4 (650) / 5.4 (650) /
5.5 (650) / 5.6 (650) / 5.9 (700)
1
.26 [US]
3
43
5,5
79.74
18
Page 19

Robacta Twin Robacta Twin Robacta Twin
Ø
Compact / Complete
X / I
M21 (EN 439)
(10 min / 40°C)
max
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 900 (2x450)
-
100 / 720 (2x360)
-
100 / 900 (2x450)
DE
P
Q
P
P
min
min
min
max
[mm]
[in.]
[m] ([W])
[m] ([W])
*
[ft.] ([W])
[ft.] ([W])
[L/min]
[gal./min]1.26 [US]
[bar]
[psi.]
[bar]
[psi.]
0,8 - 1,2
.031 - .047
1,6 (1400) /
2,6 (1900)
5.25 (1400) /
8.53 (1900)
3
43
5,5
79.74
0,8 - 1,2
.031 - .047
4,5 (2000)
14.76 (2000)
1
1.26 [US]
3
43
5,5
79.74
0,8 - 1,6
.031 - .063
1,6 (1400) / 2,6 (1900)
3,6 (2400)
5.25 (1400) / 8.53 (1900)
11.81 (2400)
1
1.26 [US]
3
43
5,5
79.74
19
Page 20

20
Page 21

Contents
General 22
General remarks 22
Colours of individual hosepack components 22
Scope of supply 22
Connections 22
Overview 23
Maximum PAP axis rotation 24
Options and addons 24
Installing the Robacta W/CB-PAP hosepack 25
Safety 25
Preparations 25
Fitting the wire- (2) (1) feeding hose connection to the VR 1500-PAP 25
Installing the Robacta W/CBPAP robot hosepack 26
Fitting the clamps for the weld-seam locator option 27
Connecting the robot hosepack wirefeeding hose to the VR 1500-PAP 28
Connecting the remaining components of the robot hosepack to the VR 1500-PAP 29
Connecting the remaining components of the robot hosepack to the connecting unit 29
Fitting/replacing the inner liner 30
Safety 30
Preparations 30
Fitting the inner liner 31
Fitting the robot hosepack 32
Finally... 33
Checking the position of the VR 1500-PAP 33
Technical data 34
Torch necks 34
Hosepacks 36
EN
21
Page 22

General
(a)
(b)
(c)
(e)
(f)
(d)
(f)
(1) (2) (3) (4)
(5)(6)
General remarks The Robacta W/CB-PAP robot hosepack is designed specifically for robot water-cooled
applications.
The Robacta W/CB-PAP hosepack connects the VR 1500-PAP/W robot wirefeeder with
the water-cooled robot welding torches in the Robacta series, and runs inside the robot
arm.
Colours of individual hosepack
components
Scope of supply
IMPORTANT! The colours of individual hose pack components may deviate from those
shown on the illustrations in these installation instructions.
a) 1 x bare steel inner liner, 1.2 mm
b) 1 x Robacta W/CB-PAP robot ho-
sepack, water-cooled
c) 1 x wirefeeding hose connection
d) 1 x clamping element 1.2 mm
e) 1 x fitting wrench
f) 1 x wire nozzle, 1.2 mm, width across
10 mm
g) Two clamps and two screws for the
weld-seam locator option (these are
only supplied together with the weldseam locator)
Robacta W/CB-PAP hosepack (watercooled) scope
of supply
Connections
Connections on the W/CB-PAP Robacta hosepack
(1) Water return (hose with plug con-
nector)
(2) Shielding gas (hose with no plug
connector)
(3) Wirefeeding hose
(4) Coupling for Robacta torch neck
(5) CrashBox control line
(6) Current/water flow
22
Page 23

Overview
(1)
(9)
(8)
(7)
(6)
(5)
(4)(3)
(2)
(*)
(10)
EN
Overview
(1) Cooling unit (e.g. FK 4000-R with optional flow watchdog)
(2) Power source (e.g. TransPuls Synergic 5000) with optional internal VR control in-
stalled
(3) Interconnecting hosepack (power source - robot interface)
(4) Hosepack extension with connecting unit (robot interface - VR 1500-PAP)
(5) Wirefeeder mount
(6) Robot wirefeeder VR 1500-PAP
(7) Robacta W/CB-PAP robot hosepack
(8) Robacta-PAP CrashBox
(9) Robacta robot welding torch
(10) Robot
(*) Robacta robot welding torch
23
Page 24

Maximum PAP
axis rotation
Options and addons
- Bare steel inner liner, for wire Ø 0.8, 1.0 and 1.6 mm
- Wire nozzle for wire Ø 0.8, 1.0 and 1.6 mm
- M8 contact tube for wire Ø 0.8, 1.0, 1.4 and 1.6 mm
- M10 contact tube for wire Ø 0.8, 1.0, 1.4 and 1.6 mm
- Clamping element Ø 0.8, 1.0 and 1.6 mm
24
Page 25

Installing the Robacta W/CB-PAP hosepack
(1)(2)
Safety
Preparations
WARNING!
Danger from incorrect operation and work that is not carried out properly.
This can result in serious personal injury and damage to property.
All the work and functions described in this document must only be carried out by
▶
technically trained and qualified personnel.
Read and understand this document in full.
▶
Read and understand all safety rules and user documentation for this device and all
▶
system components.
WARNING!
Danger from electrical current.
This can result in serious personal injury and damage to property.
Before starting work, switch off all devices and components involved and disconnect
▶
them from the grid.
Secure all devices and components involved so they cannot be switched back on.
▶
After opening the device, use a suitable measuring instrument to check that electri-
▶
cally charged components (such as capacitors) have been discharged.
Fit the VR 1500-PAP robot wirefeeder to the robot
1
EN
Fitting the wire(2) (1) feeding hose connection to
the VR 1500-PAP
IMPORTANT! Do not tighten the M8 x 16 mm Allen screws yet; the robot wirefeeder may
still need to be adjusted. The VR 1500-PAP must still be movable.
Fit hosepack extension connecting unit to the robot
2
Fit the robot flange and the Robacta-PAP CrashBox to the robot
3
Unscrew union nut from Robacta-PAP CrashBox
4
Detailed steps for installing the robot wirefeeder, hosepack extension connecting unit
and CrashBox can be found in the corresponding operating instructions or in the installation instructions.
1. Unscrew wire nozzle from wirefeeding
hose connection
2. Lightly screw wirefeeding hose connection (1) into robot wirefeeder VR
1500-PAP (2)
Screwing the wirefeeding hose connection into the
VR 1500-PAP
25
Page 26

Installing the Ro-
(3)
(5)
(4)
)5()8(
(7) (6)
(9)
(9)(10)
bacta W/CBPAP
robot hosepack
Feeding in the W/CB-PAP hosepack
Feed in the Robacta W/CB-PAP ho-
1
sepack (5) on the 5th straight robot
axis:
a) the water/current cable (3)
b) water return hose, red (4)
c) all other hosepack components
Arrange the Robacta W/CB-PAP robot
2
hosepack (5) in such a way that the
spline (6) is positioned in the appropriate recess (7) on the Crash-Box
thread (8)
Only when using the weld-seam locator option:
IMPORTANT! Ensure that the weldseam locator cable is not damaged
when fitting the hosepack.
Adjusting the robot hosepack
Unscrewing the insulation ring
Screwing on the union nut and insulation ring
Unscrew insulation ring (9) from ho-
3
sepack
Screw on crash box union nut (10)
4
and insulation ring (9)
26
Page 27

Tightening the union nut
(1)
(2)
Tighten crash box union nut using fit-
5
ting wrench
EN
Fitting the
clamps for the
weld-seam locator option
Press the weld-seam locator plug (1)
1
into the clamp as shown so that it is
completely flush
Press the weld-seam locator cable in-
2
to the corresponding slot in the clamp
(2)
Place the clamps onto the CrashBox
3
from both sides
27
Page 28

(3)
(3)
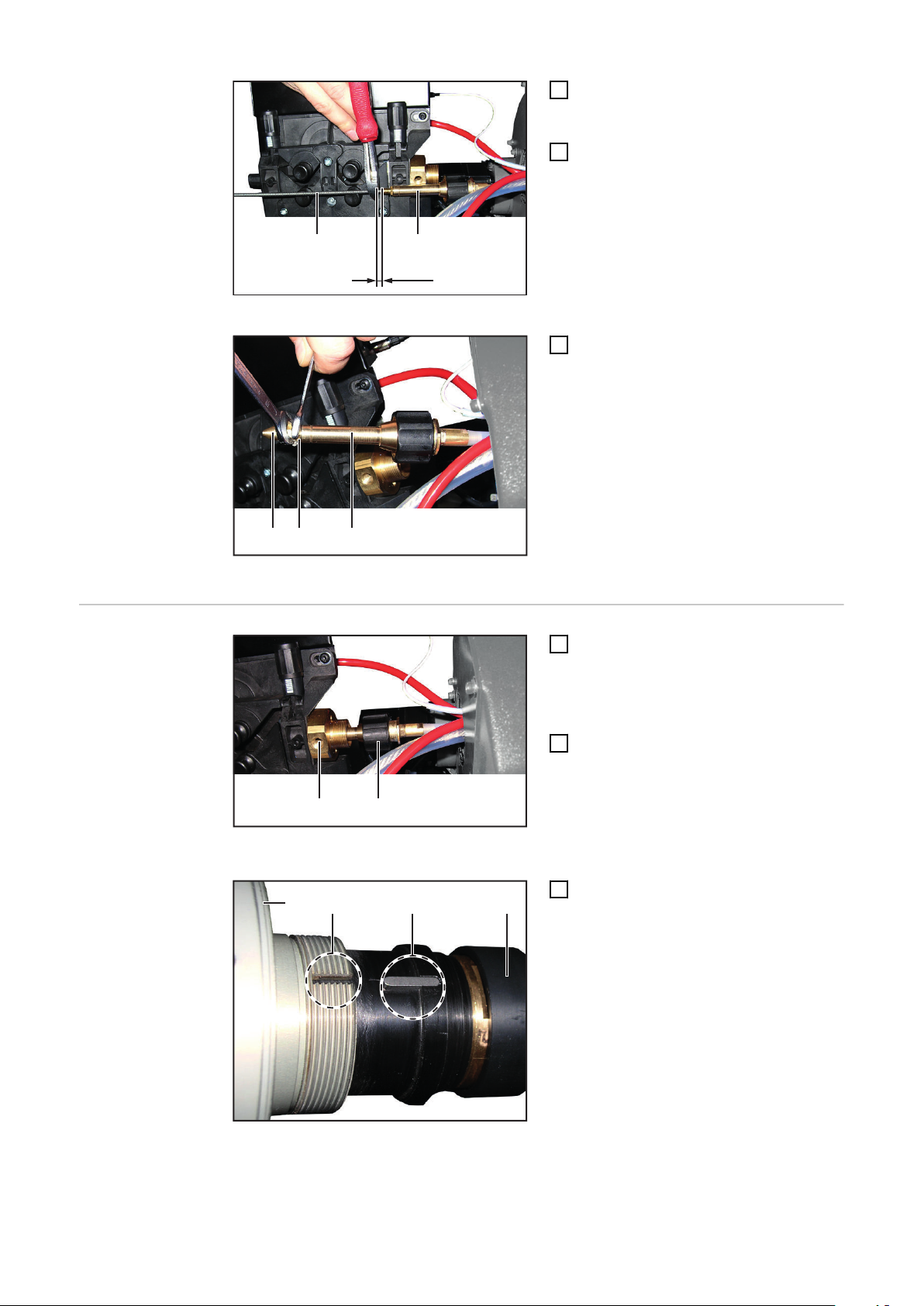
Screw (3) the clamps in place
(11)
(12)
(1)
~ 1 - 5 mm
(1)
(12)
4
Connecting the
robot hosepack
wirefeeding hose
to the VR 1500PAP
Adjusting the VR 1500-PAP
Push VR 1500-PAP forwards until the
1
distance between the stop position
(11) of the wirefeeding hose connection (1) and the robot hosepack wirefeeding hose (12) is approx. 1 - 5 mm
Fix the VR 1500-PAP in place: Tighten
2
screws for fitting the wirefeeder
Screw wirefeeding hose (12) onto
3
wirefeeding hose connection (1)
IMPORTANT! Fix the wirefeeding hose
(12) in place using flat spanner (width
across 10 mm) and turn the wirefeeding
hose connection (1).
28
Adjusting the VR 1500-PAP
Screw wirefeeding hose (12) and wire-
4
feeding hose connection (1) together
as far as they will go using 2 flat spanners (width across 10 mm)
Page 29

Connecting the
(14)
(13)
(15)
(16)
(17)
(16)
remaining components of the robot hosepack to
the VR 1500-PAP
Connecting the gas hose and CrashBox control line
Connect shielding gas hose (with no
1
plug connector) of the robot hosepack
(13) to the VR 1500-PAP
Connect CrashBox control line (14) to
2
the VR 1500-PAP
EN
Connecting the
remaining components of the robot hosepack to
the connecting
unit
Connecting the cable for current/water flow
Connect the cable for current/water
1
flow (15) to the hosepack extension
connecting unit (16)
Tighten cable for current/water flow
2
(15) using gaspipe pliers
Connect the water return hose (with
3
plug connector) (17) to the hosepack
extension connecting unit (16)
Connecting the water return hose
29
Page 30

Fitting/replacing the inner liner
(1)(2)
(3)
(4)
Safety
Preparations
WARNING!
Danger from incorrect operation and work that is not carried out properly.
This can result in serious personal injury and damage to property.
All the work and functions described in this document must only be carried out by
▶
technically trained and qualified personnel.
Read and understand this document in full.
▶
Read and understand all safety rules and user documentation for this device and all
▶
system components.
WARNING!
Danger from electrical current.
This can result in serious personal injury and damage to property.
Before starting work, switch off all devices and components involved and disconnect
▶
them from the grid.
Secure all devices and components involved so they cannot be switched back on.
▶
After opening the device, use a suitable measuring instrument to check that electri-
▶
cally charged components (such as capacitors) have been discharged.
Unscrew the insulation ring (1)
1
Unscrew the CrashBox union nut (2)
2
30
Unscrewing the union nut and insulation ring
Fitting the torch neck
Loosening the union nut
Fit Robacta torch neck (3) without gas
3
nozzle and contact tube
Loosen union nut (4) on the wirefee-
4
ding hose connection
Page 31

(5)
(6)
Pulling the robot hosepack forwards
(7)
(8)
(7)
~ 2 mm
(5)
Draw robot hosepack forwards until
5
the wirefeeding hose connection (5)
comes out of the VR 1500-PAP (6).
EN
Fitting the inner
liner
Feeding in the inner liner
Feed inner liner (7) from the front into
1
the robot hosepack
Push inner liner with contact tube (8)
2
towards the back
Screw on contact tube (8)
3
Tighten contact tube (8) using fitting
4
wrench
Fitting the contact tube
Cutting the inner liner to length
Cut inner liner approx. 2 mm after the
5
wirefeeding hose connection (5)
Ensure that there are no burrs on the
6
cut inner liner
31
Page 32

(5)(9) (5a)
Screwing on the wire nozzle
(6) (5)
)01()31( (12) (11)
(4) (5)(6)
Fix the inner liner in place:
7
Screw wire nozzle (9) onto the clamping element (5a) using 2 flat spanners (width across 10 mm). In its delivered state, the clamping element (5a)
is fitted to the wirefeeding hose connection (5).
Fitting the robot
hosepack
Feeding the wirefeeding hose connection into the VR
1500-PAP
Draw robot hosepack forwards until it
1
reaches a point where the wirefeeding
hose connection (5) can be fed back
into the VR 1500-PAP (6).
Feed wirefeeding hose (5) into the VR
2
1500-PAP (6)
Arrange the Robacta W/CB-PAP robot
3
hosepack (10) in such a way that the
spline (11) is positioned in the appropriate recess (12) on the Crash-Box
thread (13)
32
Adjusting the robot hosepack
Tighten union nut (4) on the wirefee-
4
ding hose connection (5) onto VR
1500-PAP (6) using fitting wrench
Tightening the union nut
Page 33

Finally...
(1)(2)
(3) (14)
Screwing on the union nut and insulation ring
Fitting the torch neck and gas nozzle
Disconnect the Robacta torch neck
1
Screw on crash box union nut (2) and
2
insulation ring (1)
Tighten crash box union nut (2) using
3
fitting wrench
Fit Robacta torch neck (3)
4
Fit the gas nozzle (14)
5
EN
Checking the position of the VR
1500-PAP
IMPORTANT! Before commissioning, check the installation position of the robot wirefee-
der VR 1500-PAP
- when the Robacta W/CB-PAP robot hosepack is connected and
- when the robot is moving.
The VR 1500-PAP must remain firmly in place during every movement of the robot axis
and must not make any kind of movement.
If the VR 1500-PAP moves along with the robot axis, adjust the installation position of the
VR 1500-PAP.
Rocking movements, for example, indicate that the VR 1500-PAP has been installed too
far back. If this is the case, correct the installation position of the VR 1500-PAP by bringing it forwards towards the CrashBox.
33
Page 34

Technical data
Ø
Ø
Ø
Torch necks Explanation of symbols:
water-cooled
X Duty cycle in %
ED* Duty cycle
X / I
M21 (EN 439)
X / I
C1 (EN 439)
(10 min / 40°C)
max
(10 min / 40°C)
max
I
max
(M6) with contact tube M6
(M8) with contact tube M8
Voltage measurement (V-Peak):
- for mechanically driven welding torches: 141 V
This product conforms to the requirements of IEC 60974-7.
Robacta 160 Robacta 280 Robacta 300 Robacta 400
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
max. welding current in A
Electrode diameter
-
100 / 160
-
100 / 160
-
100 / 280
-
100 / 280
-
100 / 350
-
100 / 350
-
100 / 250 (M6);
400 (M8)
-
100 / 250 (M6);
400 (M8)
X / I
M21 (EN 439)
X / I
C1 (EN 439)
(10 min / 40°C)
max
(10 min / 40°C)
max
[mm]
[in.]
Robacta 500 Robacta 700 Robacta 700
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
0,8 - 1,2
.031 - .047
-
100 / 500
-
100 / 500
0,8 - 1,6
.031 - .063
0,8 - 1,2
.031 -. 047
-
100 / 700
-
100 / 700
1,0 - 1,6
.039 - .063
0,8 - 1,2
.031 - .047
TIME
-
100 / 700
-
100 / 700
1,0 - 1,6
.039 - .063
0,8 - 1,2
.031-.047
Robacta 2500
-
100 / 250
-
100 / 250
0,8 - 1,2
.031-.047
34
Page 35

Ø
Ø
Ø
Ø
X / I
(10 min / 40°C)
max
M21 (EN 439)
Robacta 5000 Robacta 7000 Rob. 500-M
(Con-Drive)
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 500
-
100 / 700
-
100 / 500
Laser HD/W
-
100 / 250
X / I
(10 min / 40°C)
max
C1 (EN 439)
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
M21 (EN 439)
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 500
0,8 - 1,6
.031 - .063
Robacta Twin
Single 300
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 300
0,8 - 1,6
.031 - .063
Robacta Twin
900 Compact
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 900
(2x450)
-
100 / 700
1,0 - 1,6
.039 - .063
Robacta Twin
500
-
100 / 500
(2x250)
1,0 - 1,6
.039 - .063
Robacta Twin
Compact PRO
-
100 / 900
(2x450)
-
100 / 500
0,8 - 1,6
.031 - .063
Robacta Twin
600
-
100 / 600
(2x300)
0,8 - 1,6
.031 - .063
-
100 / 250
1,0 - 1,6
.039 - .063
Robacta Twin
900
-
100 / 900
(2x450)
1,0 - 1,6
.039 - .063
EN
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
C1 (EN 439)
[mm]
[in.]
1,0 - 1,6
.039 - .063
1,0 - 1,6
.039 - .063
MTB 500i W/R MTB 330i W/R MTB 500d W/R MTB 330d W/R
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / ED* 500
-
100 / ED* 500
1,0 - 1,6
.039 - .063
-
100 / ED* 330
-
100 / ED* 330
0,8 - 1,6
.032 -. 063
-
100 / ED* 500
-
100 / ED* 500
1,0 - 1,6
.039 - .063
-
100 / ED* 330
-
100 / ED* 330
0,8 - 1,6
.031-.063
35
Page 36

Hosepacks Explanation of symbols:
Ø
Ø
water cooling
Length of the hosepack
X Duty cycle in %
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
C1 (EN 439)
I
max
max. welding current in A
Electrode diameter
* Lowest cooling power as per IEC 60974-2,
depends on the length of the hosepack
Voltage measurement (V-Peak): 141 V
This product conforms to the requirements of IEC 60974-7.
Robacta Robacta W/CB-PAP
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 700
-
100 / 700
0,8 - 1,6
.031 - .063
-
100 / 500
-
100 / 500
0,8 - 1,6
.031 - .063
[m] ([W])
[m] ([W])
P
*
min
[m] ([W])
[m] ([W])
[m] ([W])
[m] ([W])
1,20 (1100) / 1,50 (1300) /
1,75 (1400) / 2,50 (1400) /
3,5 (1700) / 4,5 (2100)
1,19 (550) / 1,30 (550) / 1,33 (550) /
1,38 (550) / 1,39 (600) / 1,41 (600) /
1,43 (600) / 1,44 (600) / 1,46 (600) /
1,48 (600) / 1,51 (600) / 1,59 (650) /
1,60 (650) / 1,65 (650) / 1,67 (650) /
1,68 (650) / 1,72 (650) / 1,80 (700)
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
Q
min
[L/min]
[gal./min]1.26 [US]
P
min
[bar]
[psi.]
Q
min
[bar]
[psi.]
3.90 (1100) / 4.92 (1300) /
5.74 (1400) / 8.20 (1400) /
11.4 (1700) / 14.7 (2100)
3
43
5,5
79.74
3.9 (550) / 4.2 (550) / 4.3 (550) /
4.5 (550) / 4.5 (600) / 4.6 (600) /
4.7 (600) / 4.7 (600) / 4.7 (600) /
4.8 (600) / 4.9 (600) / 5.2 (650) /
5.2 (650) / 5.4 (650) / 5.4 (650) /
5.5 (650) / 5.6 (650) / 5.9 (700)
1
.26 [US]
3
43
5,5
79.74
36
Page 37

Robacta Twin Robacta Twin Robacta Twin
Ø
Compact / Complete
X / I
(10 min / 40°C)
max
M21 (EN 439)
P
*
min
Q
min
P
min
P
max
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
[m] ([W])
[m] ([W])
[ft.] ([W])
[ft.] ([W])
[L/min]
[gal./min]1.26 [US]
[bar]
[psi.]
[bar]
[psi.]
-
100 / 900 (2x450)
0,8 - 1,2
.031 - .047
1,6 (1400) /
2,6 (1900)
5.25 (1400) /
8.53 (1900)
3
43
5,5
79.74
-
100 / 720 (2x360)
0,8 - 1,2
.031 - .047
4,5 (2000)
14.76 (2000)
1
1.26 [US]
3
43
5,5
79.74
-
100 / 900 (2x450)
0,8 - 1,6
.031 - .063
1,6 (1400) / 2,6 (1900)
3,6 (2400)
5.25 (1400) / 8.53 (1900)
11.81 (2400)
1
1.26 [US]
3
43
5,5
79.74
EN
37
Page 38

38
Page 39

Sommaire
Généralités 40
Généralités 40
Couleurs des différents composants du faisceau de liaison 40
Livraison 40
Connexions 40
Aperçu de l’installation 41
Rotation maximale de l’axe PAP 42
Options et extensions 42
Monter le faisceau de liaison Robacta W/CB-PAP 43
Sécurité 43
Préparation 43
Monter le raccord (2) (1) de la gaine de dévidoir du VR 1500-PAP 43
Monter le faisceau de liaison du robot Robacta W/CBPAP 44
Monter les colliers de fixation de l’option Recherche de cordon 45
Raccorder la gaine de dévidoir du faisceau de liaison du robot au VR 1500-PAP 46
Raccorder les autres composants du faisceau de liaison du robot au VR 1500-PAP 47
Raccorder les autres composants du faisceau de liaison à l’unité de raccordement 47
Monter / Changer l’âme de guidage du fil 48
Sécurité 48
Préparation 48
Monter l’âme de guidage du fil 49
Monter le faisceau de liaison du robot 50
Étapes finales 51
Vérifier la position du VR 1500-PAP 51
Caractéristiques techniques 52
Coudes 52
Faisceaux de câbles 54
FR
39
Page 40

Généralités
(a)
(b)
(c)
(e)
(f)
(d)
(f)
(1) (2) (3) (4)
(5)(6)
Généralités Le faisceau de liaison du robot Robacta W/CB-PAP est conçu tout spécialement pour les
applications du robot à refroidissement par eau.
Le faisceau de liaison Robacta W/CB-PAP relie le dévidoir du robot VR 1500-PAP à la
torche de soudage robot refroidie par eau de la série Robacta et est installé dans le bras
du robot.
Couleurs des
différents composants du faisceau
de liaison
Livraison
IMPORTANT! Les couleurs des différents composants du faisceau de liaison peuvent
différer de l’illustration présenté dans les présentes instructions de montage.
a) 1 x Âme de guidage du fil en acier,
nue, 1,2 mm
b) 1 x Faisceau de liaison du robot Ro-
bacta W/CB-PAP à refroidissement
par eau
c) 1 x Raccord de la gaine de dévidoir
d) 1 x Tendeur 1,2 mm
e) 1 x Clé de montage
f) 1 x Buse d’entrée du fil, 1,2 mm, SW
10 mm
g) 2 colliers de fixation et 2 vis de l’opti-
on Recherche de cordon (ne sont livrés qu’avec la fonction Recherche de
cordon)
Livraison du faisceau de liaison Robacta W/ CB-PAP
à refroidissement par eau
Connexions
Connexions du faisceau de liaison Robacta W/CBPAP
(1) Retour d’eau (tuyau avec raccord
enfichable)
(2) Gaz protecteur (tuyau sans rac-
cord enfichable)
(3) Gaine de dévidoir
(4) Raccord pour coude Robacta
(5) Câble de commande CrashBox
(6) Courant / Arrivée d’eau
40
Page 41

Aperçu de l’in-
(1)
(9)
(8)
(7)
(6)
(5)
(4)(3)
(2)
(*)
(10)
stallation
FR
Aperçu de l’installation
(1) Refroidisseur (par ex. FK 4000-R avec option contrôleur d’écoulement)
(2) Source de courant (par ex TransPuls Synergic 5000) avec option intégrée VR-
Control interne
(3) Faisceau de liaison (source de courant – dispositif d’accouplement du robot)
(4) Rallonge de faisceau de liaison avec unité de raccordement (dispositif d’accou-
plement du robot – VR 1500-PAP)
(5) Support pour dévidoir
(6) Dévidoir pour robot VR 1500-PAP
(7) Faisceau de liaison du robot Robacta W/CB-PAP
(8) CrashBox Robacta-PAP
(9) Torche de soudage pour robot Robacta
(10) Robot
(*) Dispositif d’accouplement du robot
41
Page 42

Rotation maximale de l’axe PAP
Options et extensions
- Âme de guidage du fil en acier, nue, pour des fils Ø 0,8, 1,0 et 1,6 mm
- Buse d’entrée pour des fils Ø 0,8, 1,0 et 1,6 mm
- Tube de contact M8 pour des fils Ø 0,8, 1,0, 1,4 et 1,6 mm
- Tube de contact M10 pour des fils Ø 0,8, 1,0, 1,4 et 1,6 mm
- Tendeur Ø 0,8, 1,0 et 1,6 mm
42
Page 43

Monter le faisceau de liaison Robacta W/CB-PAP
(1)(2)
Sécurité
AVERTISSEMENT!
Danger dû à une erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document doivent
▶
uniquement être exécutés par du personnel techniquement qualifié.
Ce document doit être lu et compris dans son intégralité.
▶
Lire et comprendre toutes les consignes de sécurité et la documentation utilisateur
▶
de cet appareil et de tous les composants périphériques.
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner des dommages corporels et matériels graves.
Avant d'entamer les travaux, déconnecter tous les appareils et composants con-
▶
cernés et les débrancher du réseau électrique.
S'assurer que tous les appareils et composants concernés ne peuvent pas être re-
▶
mis en marche.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure approprié,
▶
que les composants à charge électrique (condensateurs, par ex.) sont déchargés.
FR
Préparation
Monter le raccord
(2) (1) de la gaine
de dévidoir du VR
1500-PAP
Monter le dévidoir pour robot VR 1500-PAP sur le robot
1
IMPORTANT! Pour pouvoir ensuite mettre en place le dévidoir du robot, ne pas visser à
fond tout de suite les vis correspondants. Le VR 1500-PAP doit encore pouvoir être
déplacé.
Monter l’unité de raccordement de la rallonge du faisceau de liaison au robot
2
Monter la bride robot et la CrashBox Robacta-PAP sur le robot
3
Dévisser l’écrou-raccord de la CrashBox Robacta-PAP
4
Les étapes détaillées du montage du dévidoir pour robot, de l’unité de raccordement de
la rallonge du faisceau de liaison et de la CrashBox figurent dans le mode d’emploi et
dans les instructions de montage correspondants.
1. Dévisser la buse d’entrée du fil du
raccord de la gaine de dévidoir
2. Visser légèrement le raccord de la
gaine de dévidoir (1) dans le dévidoir
du robot VR 1500-PAP (2)
Visser le raccord de la gaine de dévidoir dans le VR
1500-PAP
43
Page 44

Monter le fais-
(3)
(5)
(4)
)5()8(
(7) (6)
(9)
(9)(10)
ceau de liaison
du robot Robacta
W/CBPAP
Insertion du faisceau de liaison W/CB-PAP
Insérer le faisceau de liaison de Ro-
1
bacta W/CB-PAP (5) dans le 5e arbre
droit du robot :
a) câble eau / courant (3)
b) tuyau de retour d’eau, rouge (4))
c) tous les autres composants du
faisceau de liaison
Positionner le faisceau de liaison du
2
robot Robacta W/CB-PAP (5) de telle
sorte que la clavette (6) s’adapte dans
l’encoche prévue (7) sur le filetage de
la CrashBox (8)
Uniquement en cas d’utilisation de
l’option Recherche de cordon :
IMPORTANT! Lors du montage du
faisceau de liaison, veiller à ce que le
câble de l’option Recherche de cordon
ne soit pas endommagé.
Positionner le faisceau de liaison du robot
Dévisser la bague d’isolation
Visser l’écrou-raccord et la bague d’isolation
Dévisser la bague d’isolation (9) du
3
faisceau de liaison
Visser l’écrou-raccord (10) de la
4
CrashBox et la bague d’isolation (9)
44
Page 45

Serrer l’écrou-raccord
(1)
(2)
Serrer l’écrou-raccord de la Crash-Box
5
au moyen de la clé de montage
FR
Monter les colliers de fixation
de l’option Recherche de cordon
Enfoncer la fiche de l’option Recher-
1
che de cordon (1), dans le collier de
fixation conformément à l’illustration,
affleurant avec celui-ci
Enfoncer le câble de l’option Recher-
2
che de cordon dans la rainure du collier de fixation (2) prévue à cet effet.
Placer les colliers de fixation de cha-
3
que côté de la CrashBox
45
Page 46

(3)
(3)
Visser les colliers de fixation avec les
(11)
(12)
(1)
~ 1 - 5 mm
(1)
(12)
4
vis (3)
Raccorder la gaine de dévidoir du
faisceau de liaison du robot au
VR 1500-PAP
Positionner le VR 1500-PAP
Glisser le VR 1500-PAP vers l’avant,
1
jusqu’à ce que la distance entre la
butée (11) du raccord de la gaine de
dévidoir (1) et la gaine de dévidoir du
faisceau de liaison du robot (12) soit
d’environ 1 - 5 mm
Fixer le VR 1500-PAP : serrer les vis
2
pour le montage du dévidoir
Visser la gaine de dévidoir (12) au rac-
3
cord de la gaine de dévidoir (1)
IMPORTANT! Fixer la gaine de dévidoir
(12) au moyen de la clé à fourche SW 10
et tourner le raccord de la gaine de dévidoir (1).
46
Positionner le VR 1500-PAP
Visser ensemble la gaine de dévidoir
4
(12) et le raccord de la gaine de dévidoir (1) au moyen de 2 clés à fourche
SW 10 mm à fond jusqu’à la butée
Page 47

Raccorder les au-
(14)
(13)
(15)
(16)
(17)
(16)
tres composants
du faisceau de liaison du robot au
VR 1500-PAP
Raccorder le tuyau de gaz et le câble de commande
de la CrashBox
Brancher le tuyau de gaz protecteur
1
(sans raccord enfichable) du faisceau
de liaison du robot (13) au VR 1500PAP
Raccorder le câble de commande de
2
la CrashBox (14) au VR 1500-PAP
FR
Raccorder les autres composants
du faisceau de liaison à l’unité de
raccordement
Raccorder le câble pour le courant / l’arrivée d’eau
Raccorder le câble pour le courant /
1
l’arrivée d’eau (15) à l’unité de raccordement de la rallonge du faisceau de
liaison (16)
Serrer le câble pour le courant / l’ar-
2
rivée d’eau (15) à l’aide d’une pince
réglable
Raccorder le tuyau pour le retour
3
d’eau (avec raccord enfichable) (17) à
l’unité de raccordement de la rallonge
du faisceau de liaison (16)
Raccorder le tuyau pour le retour d’eau
47
Page 48

Monter / Changer l’âme de guidage du fil
(1)(2)
(3)
Sécurité
AVERTISSEMENT!
Danger dû à une erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document doivent
▶
uniquement être exécutés par du personnel techniquement qualifié.
Ce document doit être lu et compris dans son intégralité.
▶
Lire et comprendre toutes les consignes de sécurité et la documentation utilisateur
▶
de cet appareil et de tous les composants périphériques.
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner des dommages corporels et matériels graves.
Avant d'entamer les travaux, déconnecter tous les appareils et composants con-
▶
cernés et les débrancher du réseau électrique.
S'assurer que tous les appareils et composants concernés ne peuvent pas être re-
▶
mis en marche.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure approprié,
▶
que les composants à charge électrique (condensateurs, par ex.) sont déchargés.
Préparation
Dévisser l’écrou-raccord et la bague d’isolation
Monter le coude
Dévisser la bague d’isolation (1)
1
Dévisser l’écrou-raccord (2) de la
2
CrashBox
Monter le coude Robacta (3) sans bu-
3
se gaz ni tube de contact
48
Page 49

(4)
Desserrer l’écrou-raccord
(5)
(6)
(7)
(8)
Tirer le faisceau de liaison du robot vers l’avant
Desserrer l’écrou-raccord (4) au ni-
4
veau du raccord de la gaine de dévidoir
Tirer le faisceau de liaison du robot
5
vers l’avant, jusqu’à ce que le raccord
de la gaine de dévidoir (5) sorte du VR
1500-PAP (6)
FR
Monter l’âme de
guidage du fil
Insertion de l’âme de guidage du fil
Insérer l’âme de guidage du fil (7) de-
1
puis l’avant dans le faisceau de liaison
du robot
Repousser l’âme de guidage du fil
2
vers l’arrière avec le tube de contact
Visser le tube de contact (8)
3
Serrer le tube de contact (8) avec la
4
clé de montage
Montage du tube de contact
49
Page 50

(7)
~ 2 mm
(5)
Égalisation de la longueur de l’âme de guidage du fil
(5)(9) (5a)
(6) (5)
)01()31( (12) (11)
Égaliser la longueur de l’âme de gui-
5
dage du fil à environ 2 mm après le
raccord de la gaine de dévidoir (5)
S’assurer de l’absence d’arête sur
6
l’âme de guidage du fil ainsi égalisée
Fixer l’âme de guidage du fil :
7
visser la buse d’entrée du fil (9) au
moyen de 2 clés à fourche SW 10 mm
sur le tendeur (5a). Le tendeur (5a)
est monté sur le raccord de la gaine
de dévidoir (5) à la livraison.
Monter le faisceau de liaison
du robot
Visser la buse d’entrée du fil
Insérer le raccord de la gaine de dévidoir dans le VR
1500-PAP
Tirer le faisceau de liaison du robot
1
vers l’avant, jusqu’à ce que le raccord
de la gaine de dévidoir (5) puisse à
nouveau être introduit dans le VR
1500-PAP (6)
Insérer la gaine de dévidoir (5) dans le
2
VR 1500-PAP (6)
Positionner le faisceau de liaison du
3
robot Robacta W/CB-PAP (10) de telle
sorte que la clavette (11) s’adapte
dans l’encoche prévue (12) sur le filetage de la CrashBox (13)
50
Positionner le faisceau de liaison du robot
Page 51

(4) (5)(6)
Serrer l’écrou-raccord
(1)(2)
(3) (14)
Serrer l’écrou-raccord (4) du raccord
4
de la gaine de dévidoir (5) au niveau
du VR 1500-PAP (6) au moyen de la
clé de montage
FR
Étapes finales
Visser l’écrou-raccord et la bague d’isolation
Monter le coude et la buse gaz
Démonter le coude Robacta
1
Visser l’écrou-raccord (2) de la Crash-
2
Box et la bague d’isolation (1)
Serrer l’écrou-raccord (2) de la Crash-
3
Box au moyen de la clé de montage
Monter le coude Robacta (3)
4
Monter la buse gaz (14)
5
Vérifier la position du VR 1500PAP
IMPORTANT! Vérifier la position de montage du dévidoir pour robot VR 1500-PAP avant
sa mise en service :
- avec le faisceau de liaison du robot Robacta W/CB-PAP raccordé et
- lorsque le robot bouge.
Le VR 1500-PAP doit être solidement fixé pour chaque mouvement des arbres du robot
et ne doit subir aucun déplacement.
Si le VR 1500-PAP se déplace avec les mouvements des arbres du robot, ajuster la position de montage du VR 1500-PAP.
Des mouvements de basculement sont par exemple un signe que le VR 1500-PAP a été
monté trop en arrière. Dans ce cas, corriger la position de montage du VR 1500-PAP
vers l’avant dans la direction de la CrashBox.
51
Page 52

Caractéristiques techniques
Ø
Ø
Ø
Coudes Explication des symboles :
refroidissement par eau
X Facteur de marche en %
ED* Facteur de marche
X / I
M21 (EN 439)
X / I
C1 (EN 439)
(10 min / 40°C)
max
(10 min / 40°C)
max
I
max
(M6) avec tube de contact M6
(M8) avec tube de contact M8
Mesure de la tension (V-Peak) :
- pour torches de soudage à guidage mécanique: 141 V
Ce produit satisfait aux exigences de la norme IEC 60974-4.
Robacta 160 Robacta 280 Robacta 300 Robacta 400
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
Courant de soudage max. en A
Diamètre de l’électrode
-
100 / 160
-
100 / 160
-
100 / 280
-
100 / 280
-
100 / 350
-
100 / 350
-
100 / 250 (M6);
400 (M8)
-
100 / 250 (M6);
400 (M8)
X / I
M21 (EN 439)
X / I
C1 (EN 439)
(10 min / 40°C)
max
(10 min / 40°C)
max
[mm]
[in.]
Robacta 500 Robacta 700 Robacta 700
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
0,8 - 1,2
.031 - .047
-
100 / 500
-
100 / 500
0,8 - 1,6
.031 - .063
0,8 - 1,2
.031 -. 047
-
100 / 700
-
100 / 700
1,0 - 1,6
.039 - .063
0,8 - 1,2
.031 - .047
TIME
-
100 / 700
-
100 / 700
1,0 - 1,6
.039 - .063
0,8 - 1,2
.031-.047
Robacta 2500
-
100 / 250
-
100 / 250
0,8 - 1,2
.031-.047
52
Page 53

Ø
Ø
Ø
Ø
X / I
(10 min / 40°C)
max
M21 (EN 439)
Robacta 5000 Robacta 7000 Rob. 500-M
(Con-Drive)
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 500
-
100 / 700
-
100 / 500
Laser HD/W
-
100 / 250
X / I
(10 min / 40°C)
max
C1 (EN 439)
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
M21 (EN 439)
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 500
0,8 - 1,6
.031 - .063
Robacta Twin
Single 300
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 300
0,8 - 1,6
.031 - .063
Robacta Twin
900 Compact
[%] / [A]
[%] / [A]
[%] / [A]
-
100 / 900
(2x450)
-
100 / 700
1,0 - 1,6
.039 - .063
Robacta Twin
500
-
100 / 500
(2x250)
1,0 - 1,6
.039 - .063
Robacta Twin
Compact PRO
-
100 / 900
(2x450)
-
100 / 500
0,8 - 1,6
.031 - .063
Robacta Twin
600
-
100 / 600
(2x300)
0,8 - 1,6
.031 - .063
-
100 / 250
1,0 - 1,6
.039 - .063
FR
Robacta Twin
900
-
100 / 900
(2x450)
1,0 - 1,6
.039 - .063
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
C1 (EN 439)
[mm]
[in.]
1,0 - 1,6
.039 - .063
1,0 - 1,6
.039 - .063
MTB 500i W/R MTB 330i W/R MTB 500d W/R MTB 330d W/R
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / ED* 500
-
100 / ED* 500
1,0 - 1,6
.039 - .063
-
100 / ED* 330
-
100 / ED* 330
0,8 - 1,6
.032 -. 063
-
100 / ED* 500
-
100 / ED* 500
1,0 - 1,6
.039 - .063
-
100 / ED* 330
-
100 / ED* 330
0,8 - 1,6
.031-.063
53
Page 54

Faisceaux de
Ø
Ø
câbles
Explication des symboles :
Refroidissement par eau
Longueur du faisceau de liaison
X Facteur de marche en %
X / I
(10 min / 40°C)
max
M21 (EN 439)
X / I
(10 min / 40°C)
max
C1 (EN 439)
I
max
Courant de soudage max. en A
Diamètre de l’électrode
* Puissance de refroidissement minimale conformément à la norme IEC
60974-2, dépend de la longueur du faisceau de liaison
Mesure de la tension (V-Peak) : 141 V
Ce produit satisfait aux exigences de la norme IEC 60974-4.
Robacta Robacta W/CB-PAP
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
-
100 / 700
-
100 / 700
0,8 - 1,6
.031 - .063
-
100 / 500
-
100 / 500
0,8 - 1,6
.031 - .063
[m] ([W])
[m] ([W])
P
*
min
[m] ([W])
[m] ([W])
[m] ([W])
[m] ([W])
1,20 (1100) / 1,50 (1300) /
1,75 (1400) / 2,50 (1400) /
3,5 (1700) / 4,5 (2100)
1,19 (550) / 1,30 (550) / 1,33 (550) /
1,38 (550) / 1,39 (600) / 1,41 (600) /
1,43 (600) / 1,44 (600) / 1,46 (600) /
1,48 (600) / 1,51 (600) / 1,59 (650) /
1,60 (650) / 1,65 (650) / 1,67 (650) /
1,68 (650) / 1,72 (650) / 1,80 (700)
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
[ft.] ([W])
Q
min
[L/min]
[gal./min]1.26 [US]
P
min
[bar]
[psi.]
Q
min
[bar]
[psi.]
3.90 (1100) / 4.92 (1300) /
5.74 (1400) / 8.20 (1400) /
11.4 (1700) / 14.7 (2100)
3
43
5,5
79.74
3.9 (550) / 4.2 (550) / 4.3 (550) /
4.5 (550) / 4.5 (600) / 4.6 (600) /
4.7 (600) / 4.7 (600) / 4.7 (600) /
4.8 (600) / 4.9 (600) / 5.2 (650) /
5.2 (650) / 5.4 (650) / 5.4 (650) /
5.5 (650) / 5.6 (650) / 5.9 (700)
1
.26 [US]
3
43
5,5
79.74
54
Page 55

Robacta Twin Robacta Twin Robacta Twin
Ø
Compact / Complete
X / I
(10 min / 40°C)
max
M21 (EN 439)
P
*
min
Q
min
P
min
P
max
[%] / [A]
[%] / [A]
[%] / [A]
[mm]
[in.]
[m] ([W])
[m] ([W])
[ft.] ([W])
[ft.] ([W])
[L/min]
[gal./min]1.26 [US]
[bar]
[psi.]
[bar]
[psi.]
-
100 / 900 (2x450)
0,8 - 1,2
.031 - .047
1,6 (1400) /
2,6 (1900)
5.25 (1400) /
8.53 (1900)
3
43
5,5
79.74
-
100 / 720 (2x360)
0,8 - 1,2
.031 - .047
4,5 (2000)
14.76 (2000)
1
1.26 [US]
3
43
5,5
79.74
-
100 / 900 (2x450)
0,8 - 1,6
.031 - .063
1,6 (1400) / 2,6 (1900)
3,6 (2400)
5.25 (1400) / 8.53 (1900)
11.81 (2400)
1
1.26 [US]
3
43
5,5
79.74
FR
55
Page 56

Fronius International GmbH
Froniusstraße 1
4643 Pettenbach
Austria
contact@fronius.com
www.fronius.com
Under www.fronius.com/contact you will find the adresses
of all Fronius Sales & Service Partners and locations.
spareparts.fronius.com
SPAREPARTS
ONLINE
 Loading...
Loading...