

Operating
Instructions
Robacta Reamer V Twin
ZH
操作说明书
42,0426,0142,ZH 025-30012023

目录
安全规范 6
安全标志说明 6
概要 6
预期用途 6
环境条件 7
运营商的责任 7
操作人员的责任 7
特殊危害 7
保护您自己和他人 8
EMC 设备分级 8
EMC 措施 8
EMF 措施 9
安装位置和运输期间的安全措施 9
正常操作中的安全措施 9
调试、维护和维修 10
安全检查 10
处置 10
安全标识 10
版权 10
概述 11
概述 13
原理 13
设备设计方案 13
应用领域 13
供货范围 14
可用选件 14
切丝机的工作原理/最大焊丝直径 14
设备上的警告标志 15
运输 17
运输设备 17
包装上的运输说明 17
ZH
操作元件、接口和机械组件 19
安全 21
安全 21
Robacta Reamer V Twin 控制元件、接口和机械部件 22
控制元件、接口和机械部件 22
机器人控件的标准 I/O 连接插头 (X1) 引脚分配 24
概要 24
标准 I/O (X1) 终端连接器引脚分配 24
安装和调试 25
安全 27
安全 27
确保清洁设备已减压 28
调试之前 29
预期用途 29
操作人员,维修人员 29
安装规定 29
压缩空气供应规范 29
在操作人员未经培训的情况下确保设备安全运行的措施 29
通过螺钉将清洗设备固定于固体表面 30
将清洁设备和安装台架用螺钉拧到底面上 30
将清洁设备用螺钉拧到底面上 30
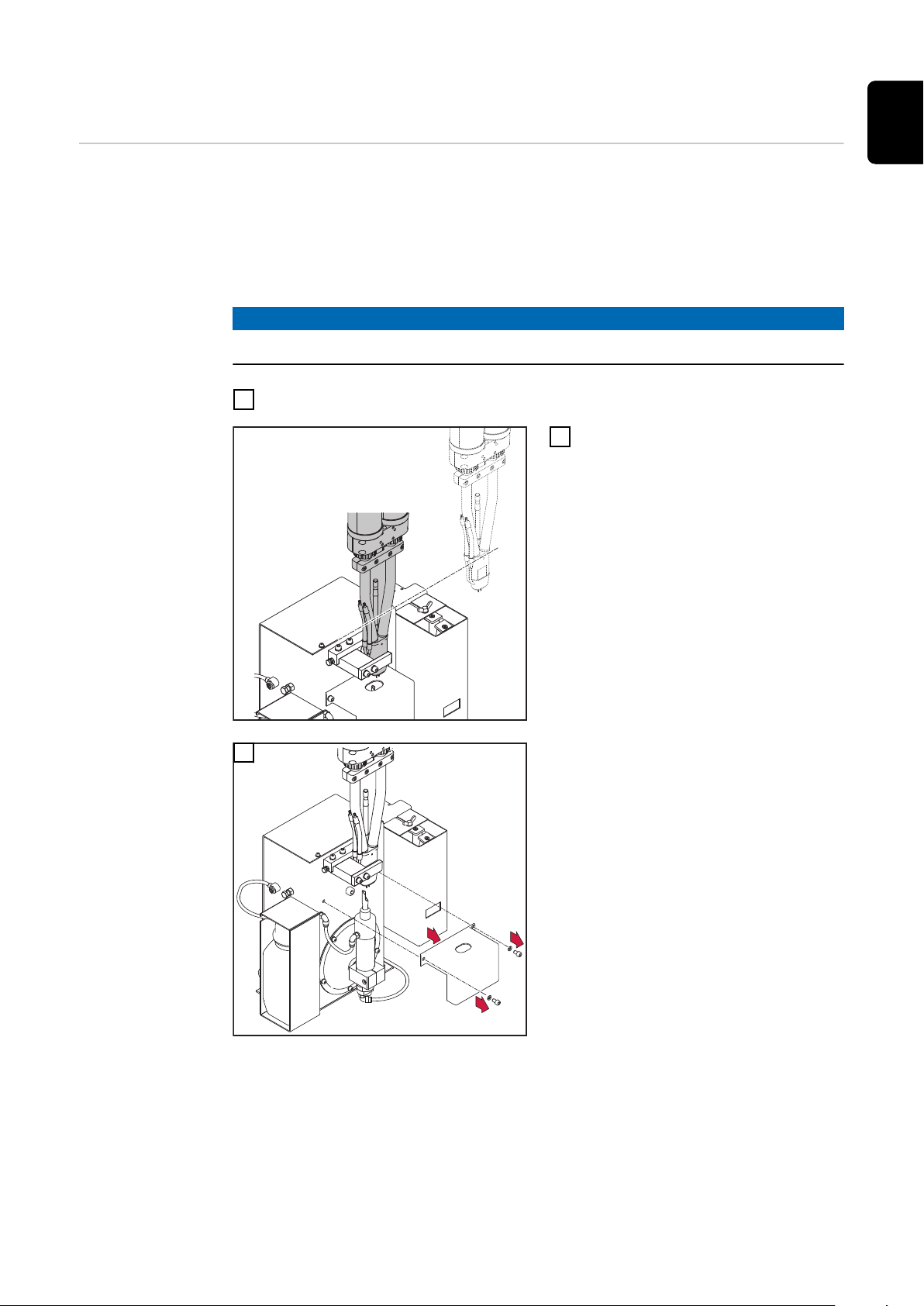
安装清洁刀具 32
安装清洁刀具 32
焊枪清洁位置 33
3
外置冷却剂管线焊枪的清洁位置 33
内置冷却剂管线焊枪的清洁位置 33
安装内置冷却剂管线焊枪的夹紧系统 34
所需工具 34
拆下现有夹紧系统 34
安装 Twin 夹紧系统 35
调整提升设备 37
调整提升设备 37
安装压缩空气供应 39
借助压缩空气安全阀功能建立清洁设备的压缩空气供应 39
启动分离剂雾化器 40
填灌分离剂容器(1 升),并连接到清洁设备 40
将分离剂容器(10 升)连接到清洁设备 41
调整分离剂雾化器喷射量 42
使用液位控制传感器 43
可选的液位控制传感器 43
传感器上的控件及指示灯 43
安装适配器钻孔尺寸 43
安装液位控制传感器 44
校准空状态 45
校准满状态 45
锁定/解锁液位控制传感器 46
电气连接 46
手动检查清洁设备功能: 47
安全标识 47
手动检查功能 47
启动清洗设备 49
启动先决条件 49
调试 49
清洗程序顺序 50
安全标识 50
清洁程序顺序 - 概述 51
1.切丝机 52
2.“分离剂液位”查询(选项) 53
3.“清洁电机已调低”查询 54
4.“气体喷嘴自由”查询 55
5.清洗 56
清洁信号波形 61
信号输入 61
信号输出 61
未使用时间定义的信号 61
信号波形:切丝机(输入与输出) 62
维护、保养和废料处理 63
安全 65
安全 65
维护、保养和废料处理 66
概要 66
每次启动前 66
每日 66
每周 66
每 6 个月 66
按需: 66
废料处理 66
调整旋转机构止动角度 67
概要 67
准备工作 67
调整旋转机构止动角度 68
最后...... 69
错误诊断和错误排除 71
4

安全 73
安全 73
错误诊断和错误排除 74
程序顺序错误 74
技术数据 77
技术数据 79
Robacta Reamer V Twin 79
附录 81
电路图 Robacta Reamer V Twin 83
Robacta Reamer V Twin 气动图 84
一致性声明 85
ZH
5
安全规范
安全标志说明
警告!
表示存在直接危险。
若不予以避免,将导致死亡或严重的人身伤害。
▶
危险!
表示存在潜在危险的情况。
若不予以避免,可能会导致死亡或严重的人身伤害。
▶
小心!
表示可能导致财产损失或人身伤害的情况。
若不予以避免,可能会导致轻微的人身伤害和/或财产损失。
▶
注意!
表示可能会导致不良后果及设备损坏。
概要 本设备采用尖端技术制造而成,符合公认安全标准。任何方式的操作或使用不当,均可能
导致:
-
操作人员或第三方伤亡;A
-
设备损坏以及运营公司的其它物资损失;
-
设备工作效率低下。
所有调试、操作、维修和维护设备的人员必须:
-
具备适当的资格;
-
掌握足够的自动焊接知识,且
-
仔细阅读并遵守这些操作说明以及所有系统部件的操作说明书。
无论何时使用设备,均须随身携带操作说明书。除此之外,还须特别注意与事故预防和环
境保护相关的所有一般通用法规和当地法规。
设备上的所有安全和危险警告牌
-
必须清晰可读;
-
必须完好无损;
-
不得擅自移位;
-
不得被覆盖、粘贴或刷涂。
有关设备上安全和危险警告牌的位置,请参阅设备操作说明书中标题为“概要”的章节。
操作设备前,请排除可能降低安全性的所有故障。
这关乎您的人身安全!
预期用
6
途 本设备只能用于其预期用途。
本设备仅用于在自动模式下对伏能士机器人焊枪进行机械清洗。
将本设备用于任何其他目的或采用任何其他方式使用本设备,都将被视为“不符合指定用
途的操作”。对于不当使用所导致的任何损失,制造商概不负责。
正当使用的要求还包括
-
完整阅读所有操作说明书
-
遵守操作说明书中的所有指示及安全规程
-
执行所有指定的检查和保养作业
本设备专为工业及商业领域而设计。对于因在住宅区使用本设备所导致的任何损失,制造
商概不负责。
对于错误或不正确的作业结果,制造商也概不负责。
环境条件 在规定范围之外操作或储存设备将被视为不符合指定用途的操作。对于不当使用所导致的
任何损失,制造商概不负责。
环境空气温度范围:
-
操作期间:0°C 至 + 40°C(32°F 至 104°F)
-
运输和储存期间:-25°C 至 +55°C(-13°F 至 131°F)
相对湿度:
-
40°C (104°F) 时最高 50%
-
20°C (68°F) 时最高 90%
环境空气:无灰尘、酸性物质、腐蚀性气体或其他有害物质等。
海拔高度:高达 2000 m (6500 ft.)
ZH
运营商的责任 运营商需保证只由下列专人使用设备:
-
熟悉操作安全和事故防范基本规定并接受过设备操作指导
-
阅读、理解该操作说明书中内容,尤其是“安全规程”一章,并签字确认
-
接受过焊接效果要求的相关培训。
必须定期检查该操作人员是否具备安全操作意识。
操作人员的责任 所有被授权开展与该设备相关工作的人员,都有责任在开始工作之前
-
了解操作安全和事故防范基本规定
-
阅读该操作说明书中内容,尤其是“安全规程”一章,并签字确认本人已充分理解并
将确实遵守。
离开工作场所前确保即使在无人值守的状况下也不会出现人员伤亡和财产损失。
特殊危害 需远离机器人工作区域。
须将本设备并入安全区域内更高级别的安全系统中。
若在进行设置和保养作业时必须进入此区域,则请确保
-
在此区域工作期间关闭整个系统
-
并且防止它(例如由于控制故障而)意外启动。
如果未接受过培训的操作员使用设备,则必须在工作期间按照“性能等级 d”(ISO
13849-1 标准)断开压缩空气供应。
除了上述操作说明书外,还必须遵守机器人制造商所制定的安全规程。
7

使您的身体(特别是您的手部、脸部和头发)、衣物和所有工具远离运转中的装备组件,
如:
-
正在旋转的清洁刀具
-
上行/下行清洁电机
-
正在延伸/回抽的气体喷嘴夹紧设备
-
切丝机
使用后不要立即触摸清洁刀具 - 否则存在灼伤风险。遵守操作说明书中的特殊安全规程来
处理清洁刀具。
保护手部、面部和眼部免受飞散物(刨花等)和从分离剂喷嘴逸出的压缩空气/分离剂混合
物的伤害。
只有在保养、安装或维修工作期间,方可打开/取下盖板。
操作期间
-
请确保所有盖板均处于闭合状态,并且均已安装到位
-
使所有盖板均保持闭合状态
保护您自己和他人 操作设备的人员可能面临诸多危险。除了这些操作说明书之外,还必须遵守焊接系统制造
商所制定的所有安全规程。
任何设备运行过程中或进行焊接时,应使所有人员(特别是儿童)远离工作区域。但是,
如果附近有人,应当:
-
使他们意识到所有危险和健康风险(机械动力零件造成的碾压、清洁刀具造成的伤
害、飞散刨花和类似物质、逸出的压缩空气/分离剂混合物、飞溅的火花、刺眼的电
弧、吸入有害焊接烟尘、噪音、来自电源或焊接电流的潜在危险等)
-
提供合适的保护装置
-
或者,布设适当的安全网/安全幕
EMC 设备分级 放射等级 A 的设备:
-
规定仅用于工业区
-
如果应用于其他区域,可能引发线路连接和放射故障。
放射等级 B 的设备:
-
满足居民区和工业区的放射要求。也适用于使用公用低压线路供电的居民区。
根据功率铭牌或技术数据对 EMC 设备进行分级。
EMC 措施 在某些情况下,即使某一设备符合标准的排放限值,它仍可能影响到其设计应用区域(例
如,当同一位置存在敏感性装置或设备的安装地点附近设有无线电或电视接收机时)。
此时,运营公司必须采取适当措施来整顿这种局面。
根据国家及国际规定,检查和评估附近装置可能存在的问题及其抗干扰度:
-
安全装置
-
输电线、信号线和数据传输线
-
EMC 及电信装置
-
测量及校准设备
8
避免 EMC 问题的支持性措施:
1.电网电源
-
若在电源连接符合相关规定的情况下仍发生了电磁干扰,则应采取一些附加措施
(例如使用适当的电网滤波器)。
2.控制线
-
使用尽可能短的控制线
-
布设时应使控制线彼此靠近(这样做还可同时避免 EMF 问题)
-
布设时应使控制线远离其他类型的线路
3.电位均衡
4.可根据需要采取屏蔽措施
-
屏蔽附近的其他设备
-
遮蔽整个焊接装置
EMF 措施 电磁场可能会引起未知的健康问题:
-
心脏起搏器使用者、助听器使用者等在靠近设备时会对健康产生不良影响
-
心脏起搏器使用者在靠近设备和焊接作业区前必须征求医生的意见
-
为了安全起见,应使焊接用输电线与焊工头部/躯干之间的距离尽可能的远
-
切勿将焊接用输电线和中继线扛在肩上或缠绕在整个身体或某些身体部位上
ZH
安装位置和运输期
间的安全措施
正常操作中的安全
措施
设备倾翻可致人死亡!将设备水平安装并可靠固定于平坦、牢固且不受振动干扰的表面
上,并对其采取防倾翻措施。
对存在火灾或爆炸危险的区域适用的特殊规定
-
遵守适用的国家及国际规定。
按照公司内部说明和检查流程确保工作场所附近区域始终保持清洁有序。
在运输设备时,请务必遵守适用的国家及地区准则以及事故防范规定,尤其是与运输和装
运期间所涉危险相关的准则。
在运输之后但尚未调试之前,必须对设备进行目视检查,以确定其损坏情况。在启动设备
之前,必须由经培训的技术服务人员对所有损坏部位进行维修。
仅当所有安全装置功能完备时才能操作本设备。如果有任何安全装置无法正常工作,则将
产生以下风险
-
操作人员/第三方受伤或死亡,
-
设备损坏以及操作员的其它物资损失,
-
设备工作效率低下。
启动设备之前,必须对所有不能正常工作的安全装置进行维修。
切勿略过或禁用安全装置。
启动设备之前,需确保不会对他人造成危险。
至少每周对设备进行一次检查,主要检查有无明显的损坏以及安全装置的功能是否正常。
-
仅使用制造商提供的适用原装分离剂。
-
遵守分离剂安全数据表中的信息来处理分离剂。分离剂安全数据表可从服务中心处获
取或从制造商的网站下载。
-
不要将制造商提供的分离剂与其他分离剂相混合。
-
如果损坏是由于使用不同的分离剂造成的,则制造商概不负责。此外,也不会受理任
何保修索赔。
-
使用过的分离剂必须根据相关国家和国际法规进行合理处置。
9

调试、维护和维修 无法保证外购件在设计和制造上都符合对其所提要求,或者无法保证其符合安全要求。
-
只能使用原厂备用件和磨损件(此要求同样适用于标准零件)。
-
不要在未经生产商同意的情况下对设备进行任何改造、变更等。
-
必须立即更换状况不佳的工件。
-
订购时,请指定设备的准确名称和部件编号(如备件清单所示),以及序列号。
可使用压紧螺钉实现保护接地线的连接,以使壳体部件接地。
仅使用编号正确的原装压紧螺钉,并使用规定的扭矩拧紧。
安全检查 生产商建议,至少每 12 个月对设备进行一次安全检查。
建议于以下时间段由一名持证电工进行安全检查:
-
更换设备后
-
设备改型后
-
设备经维修、保养和维护后
-
至少每 12 个月进行一次安全检查。
安全检查时请遵循相应的国家与国际标准及技术规范。
有关安全检查及校准的详细信息,请咨询您所在地的服务中心。服务中心将根据您的要求
向您提供所需的必要文件。
处置 废弃的电气和电子设备必须单独收集,并按照欧洲指令和国家相关法律法规以无害于环境
的方式回收。使用过的设备必须归还经销商或送入当地授权的收集和处理系统。对使用过
的设备进行适当处理可促进材料资源的可持续循环利用。否则可能会导致潜在的健康/环境
影响。
包装材料
单独收集。检查您所在城市的规定。减小包装盒容积。
安全标识 带有 CE 认证标志的设备符合相关指令的基本要求(例如低电压、电磁兼容性和机械指
令)。
带有 CSA 测试标志的设备符合加拿大和美国相关标准的要求。
版权 该操作说明书的版权归制造商所有。
文字和插图在操作说明书付印时符合当时的技术水平。生产商保留更改权。本操作说明书
的内容不构成顾客的任何权利。我们非常欢迎有关操作说明书的改进建议以及对其中错误
的提示。
10

概述
11

12

概述
原理 Robacta Reamer V Twin 用于自动清洁
MIG/MAG 焊枪。可通过 Robacta Reamer
V Twin 来清洁各类焊枪形状所配备气体喷
嘴的内部与前部。其成果是显著提高了易损
件的使用寿命。同时,均匀涂抹分离剂可防
止污垢堆积。
设备设计方案 Robacta Reamer V Twin 正面的夹紧设备可于清洁期间将气体喷嘴夹持在适当位置。清洁
刀具用于清洁喷嘴。清洁过程结束后,通过安装在清洁电机中间的喷嘴,在气体喷嘴的内
部和前部涂上分离剂。
ZH
Robacta Reamer V Twin 标配有切丝机。在清洁过程中,Robacta Reamer V Twin 将两
根焊丝缩短到规定的长度,为下一个焊接工艺做好准备。
坚固的装配底座可用于 Robacta Reamer V Twin 的安装。
应用领域 清洁设备专用于机器人及其他自动化应用,可用于各种材料。
主要应用领域包括:
-
汽车及零部件供应行业
-
装备建设
-
化工设备建造
-
机器与履带式车辆的制造
-
施工机械与特种车辆
注意!
使用 Robacta Reamer V Twin 无法清洁导电嘴倾角为 4° 的 TWIN 焊枪!
其他选择:
Robacta Reamer Single/Twin
▶
或
Robacta TC 2000 Twin
▶
13

供货范围
(1)
(2)
(3)
(4)
图中未显示部分包括:
(5) 不带电缆的标准 I/O 终端连接器 (X1)
(6) 操作说明书
(7) 用于组装清洁设备的配件:
-
4 颗螺钉
-
4 个垫圈
-
4 个锁紧垫圈
-
4 个螺母
注意!
供货范围不包括“Robacta Reamer”分离
剂(项目编号 42,0411,8042)和清洁刀
具。
(1) 带切丝机的 Robacta Reamer V
Twin 清洁装置
(2) 飞溅托盘
(3) 清洁电机的紧固扳手
(4) 压缩空气安全阀
可用选件
切丝机的工作原理/
最大焊丝直径
清洁设备提供下列选件:
-
安装台架
-
清洁刀具辅助设备
-
液位传感器
当有来自机器人控件的激活信号时,切丝机打开和关闭。
可使用清洁设备切丝机同时切割直径长达 1.6 mm (0.063 in.) 的两根焊丝。
注意!
如果换用新的焊枪,必须重置切丝机!
14

设备上的警告标志 Robacta Reamer V Twin 上附有警告标志和功率铭牌。不得移除或涂盖警告标志和功率铭
Type
Art.No.
Chargen No.
U1
I1
Wels - Austria
p
max
24 V
6 bar (87psi.)
牌。
ZH
Robacta Reamer V Twin 上附有警告标志
警
告!以下原因会带来严重的人身伤害风险:
-
机械动力装备组件
-
从分离剂喷嘴逸出的压缩空气/分离剂混合物
-
飞散物(刨花等)
在保养和维修期间保持设备无电流和无压力。
使用所述的功能前要仔细阅读并充分理解下列文档:
-
本操作说明书
-
系统组件的所有操作说明书,尤其是安全规程
仅供室内使用
佩戴护目用具
15

设备的自动启动警告标志
16
运输
运输设备 将通过以下设备运输该设备:
-
放于托盘上通过叉车运输
-
放于托盘上通过自动装卸车运输
-
手动模式
危险!
机器和物体坠落时存在危险。
此时可能导致严重的人身伤害和财产损失。
在叉车或自动装卸车上运输时,请固定好设备以防止其翻倒。
▶
避免突然改变方向、制动或加速。
▶
ZH
包装上的运输说明
小心!
运输不当时存在危险。
此时可能导致财产损失。
因此在运输本设备时请遵守设备包装上的运输说明。
▶
17

18

操作元件、接口和机械组件
19

20
安全
安全 使用“控制元件、接口和机械部件”部分中描述的所有功能时,请遵守以下安全规程。
危险!
误操作时存在危险!
此时可能导致严重的人身伤害和财产损失。
仅接受过培训且有资质人员方可使用所述的功能。
▶
在使用此处所介绍的功能前,请务必完整阅读并充分理解以下文件:
▶
这些操作说明书
系统组件的所有操作说明书,尤其是安全规程
ZH
21

Robacta Reamer V Twin 控制元件、接口和机械部件
(7)
(6)
(1)
(2)
(3)
(4)
(5)
(8)
(13)
(9)
(12)
(10)
(11)
控制元件、接口和
机械部件
侧视图
(1) 标准 I/O 接口 (X1)
用于 + 24 V DC 电源
小心!
过电流时存在危险。
此时可能会损坏标准 I/O (X1) 接口电源。
使用 500 mA 慢断保险丝确保电源不受过电流影响。
▶
(2) 压缩空气接口
用于 6 bar (86.99 psi) 的压缩空气供应
压缩空气接口螺纹标识:G ¼"
(3) “夹紧气体喷嘴/清洁电机开”螺钉
用于手动检查气体喷嘴夹紧设备和清洁电机(气体喷嘴夹紧设备延伸/回抽,清洁
电机关闭/开启)
(4) “提升设备上/下”螺钉
用于手动检查提升设备(提升设备向上/向下移动)
(5) “喷射分离剂”螺钉
用于手动检查喷射设备(压缩空气或压缩空气/分离剂混合物从分离剂喷嘴处喷
出)
主视图
22
(6) 分离剂调节器
用于设定分离剂的用量
(7) 分离剂容器
(8) 提升装置
在清洁气体喷嘴内部时,抬起清洁电机和清洁刀具
(9) 带内部分离剂喷嘴的清洁开口
清洁电机驱动清洁刀具
(10) 防护盖板

(11) 清洁刀具
(14)
(15)
带有用于分离剂喷嘴的内部通孔
(12) 气体喷嘴夹紧装置
在清洁期间将气体喷嘴夹持在适当位置
(13) 切丝机
侧视图
ZH
(14) 切丝机选件的压缩空气和电气接口
(15) 分离剂喷嘴
将分离剂涂抹在气体喷嘴的内部和前部
23
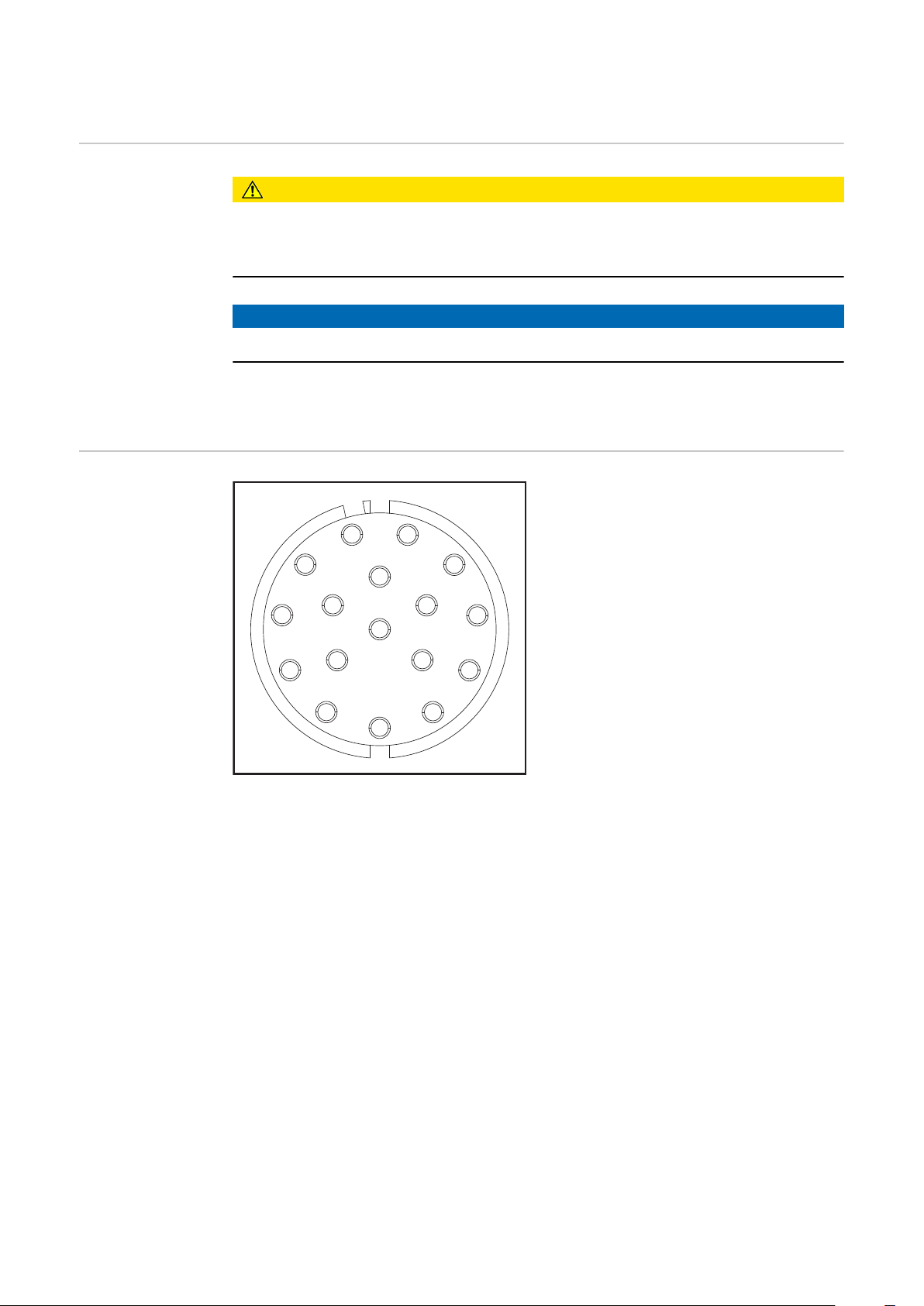
机器人控件的标准 I/O 连接插头 (X1) 引脚分配
1
2
11
10
9
8
7
6
5
4
3
12
13
14
15
16
17
概要
标准 I/O (X1) 终端
连接器引脚分配
小心!
过电流时存在危险。
此时可能会损坏标准 I/O (X1) 接口电源。
为清洁设备电源安装 500 mA 慢断保险丝以防止过电流。
▶
注意!
为了避免功能故障,清洁设备与机器人控件之间应使用尽可能短的电缆。
用于将清洁设备连接到机器人控件的标准 I/O (X1) 终端连接器是供货范围的一部分。电缆
束必须适应机器人控件的连接技术。
Robacta Reamer Braze+ 的输入和输出信
号:
1.夹紧气体喷嘴/清洁电机开(清洁刀具
转动)输入信号 + 24 V DC
2.综合接地
3.清洁电机向上输入信号(清洁刀具移至
清洁位置)+ 24 V DC
4.喷射分离剂输入信号 + 24 V DC
5.+ 24 V DC 电源
6.气体喷嘴自由输出信号
24
标准 I/O (X1) 终端连接器引脚分配 - 电缆端视图
7.气体喷嘴夹紧输出信号
8.未分配
9.分离剂液位正常输出信号
10.清洁电机已调低输出信号(清洁刀具位于初始位置)
11.清洁电机上升输出信号(清洁刀具位于清洁位置)
12.切割焊丝输入信号 + 24 V DC
13.旋转机构向左输出信号
14.旋转机构向右输出信号
15.向左移动旋转机构输入信号
16.向右移动旋转机构输入信号
17.未分配

安装和调试
25

26

安全
安全 对于“安装和调试”部分中描述的所有工作,请遵守以下安全规程。
危险!
误操作及工作不当时存在危险。
此时可能导致严重的人身伤害和财产损失。
仅接受过培训且有资质人员方可执行本操作说明书中所述的全部操作。
▶
仅接受过培训且有资质人员方可使用本操作说明书中所述的全部功能。
▶
在您完整阅读并充分理解以下文档前,请勿进行任何相关工作或使用任何相关功能:
▶
这些操作说明书和
系统组件的所有操作说明书,特别是安全规程。
危险!
机器自动启动时存在风险!
此时可能导致严重的人身伤害和财产损失。
除了本操作说明书外,还必须遵守机器人和焊接系统制造商所制定的安全规程。
▶
请确保在进入机器人工作区域时采取所有的有效防护措施。
▶
ZH
危险!
机械部件、飞散物(刨花等)以及从分离剂喷嘴逸出的压缩空气/分离剂混合物存在危险。
此时可能导致严重的人身伤害。
在清洁设备或连接的系统组件上进行任何工作前,请从清洁设备和连接的系统组件上
▶
断开客户的压缩空气供应和电源,并确保其在工作完成之前均保持断开状态。
重要!请遵守以下“确保清洁设备已减压”部分。
危险!
清洁设备电源和/或压缩空气供应存在危险!
以下情况可能导致严重的人身伤害:
清洁刀具正在旋转
提升设备正在上下移动
气体喷嘴夹紧设备正在延伸/回抽
切丝机已启动
飞散物(刨花等)
从分离剂喷嘴逸出的压缩空气/分离剂混合物
如果必须在为清洁设备提供电压和/或压缩空气的情况下对其进行操作:
使您的身体(特别是您的手部、脸部和头发)、任何物体和所有衣物均远离清洁刀
▶
具、提升设备、气体喷嘴夹紧设备、切丝机和分离剂喷嘴
佩戴耳部护具
▶
佩戴带侧面保护的护目镜
▶
27

确保清洁设备已减压尝试在没有任何压缩空气供应的情况下短暂激活清洁设备,以检查清洁设备是否已减压。
操作方法如下:
采取保护措施:
1
-
清洁刀具、提升设备、气体喷嘴夹紧设备、切丝机和分离剂喷嘴均可启动。因
此,使您的身体(特别是您的手部、脸部和头发)、任何物体和所有衣物均远离
上述装备组件
-
佩戴耳部护具
-
佩戴带侧面保护的护目镜
确保断开清洁设备的压缩空气供应
2
将 Robacta Reamer V Twin 上的“提升设备上/下”螺钉短暂地向右转动 90°,然后
3
直接将其转动回原始位置。
-
如果清洁设备不响应螺钉的转动,则说明清洁设备已减压
-
如果清洁设备响应螺钉的转动,则说明清洁设备仍连接有压缩空气供应。如果是这种
情况,则您必须断开清洁设备与压缩空气供应的连接,并在开始工作之前再次检查清
洁设备是否已减压
28

调试之前
预期用途 本清洗设备仅用于在技术数据的限制范围内于自动模式下对伏能士机器人焊枪进行机械清
洗,尤用于清洗气体喷嘴及气体喷嘴的内部空间。除此之外的任何其他用途均视为不当使
用。对于因此类不当使用所导致的任何损失,制造商概不负责。
正当使用的要求还包括
-
完整阅读所有操作说明书
-
遵守操作说明书中的所有指示及安全规程
-
执行所有指定的检查和保养作业
ZH
操作人员,维修人
员
机器自动启动时存在危险。
此时可能导致严重的人身伤害和财产损失。
▶
▶
安装规定 经测试本清洁设备防护等级为 IP 21,这表示:
-
-
不得于室外安装并操作本设备。必须防止内置的电气部件直接受潮。
机器翻倒或掉落时存在危险。
此时可能导致严重的人身伤害和财产损失。
▶
危险!
设备只能由一人操作/维修。
确保在设备工作时,操作区内只有一人从事相关作业。
可防止直径超过 12.5 mm (0.49 in.) 的坚硬异物侵入
不防水
危险!
始终将清洁设备固定到底面上。
压缩空气供应规范 为确保清洗设备正常运行,应满足以下压缩空气供应规范:
-
借助压力安全阀和压缩空气过滤器建立压缩空气供应
-
根据 ISO 8573-1:2001 标准,等级 7、4、3 仪表空气,保证压缩空气质量
3
3
在操作人员未经培
训的情况下确保设
备安全运行的措施
-
固体颗粒浓度 £ 10 mg/m
-
蒸汽压力露点 £ + 3 °C
-
含油浓度 £ 1 mg/m
若未经培训的操作人员使用本设备,则必须在设备使用期间根据 ISO 13849-1 标准的“性
能等级 d”断开设备的压缩空气供应。
我们推荐使用 FESTO 的 MS6-SV 软启动和快速排气阀,以便根据需要中断压缩空气供
应。
29

通过螺钉将清洗设备固定于固体表面
4 x
将清洁设备和安装
台架用螺钉拧到底
面上
危险!
机器翻倒或掉落时存在危险。
此时可能导致严重的人身伤害和财产损失。
根据底面(地基)类型的不同,可能需要不同的配件来安装安装台架。
▶
因此,配件不包括在安装台架的供货范围内。安装人员负责选择合适类型的配件。
▶
将可选的安装台架放置在水平、坚固且无振动的表面(基底)上
1
-
放置安装台架,使机器人行进到安装台架上清洁设备的距离尽可能短
使用适当的配件将安装台架拧到底面(地基)上
2
将清洁设备放在安装台架上
3
如图所示,将飞溅托盘放置在清洁设备
4
上
如图所示,将清洁设备和飞溅托盘牢固
5
地拧到安装台架上。使用清洁设备附带
的配件
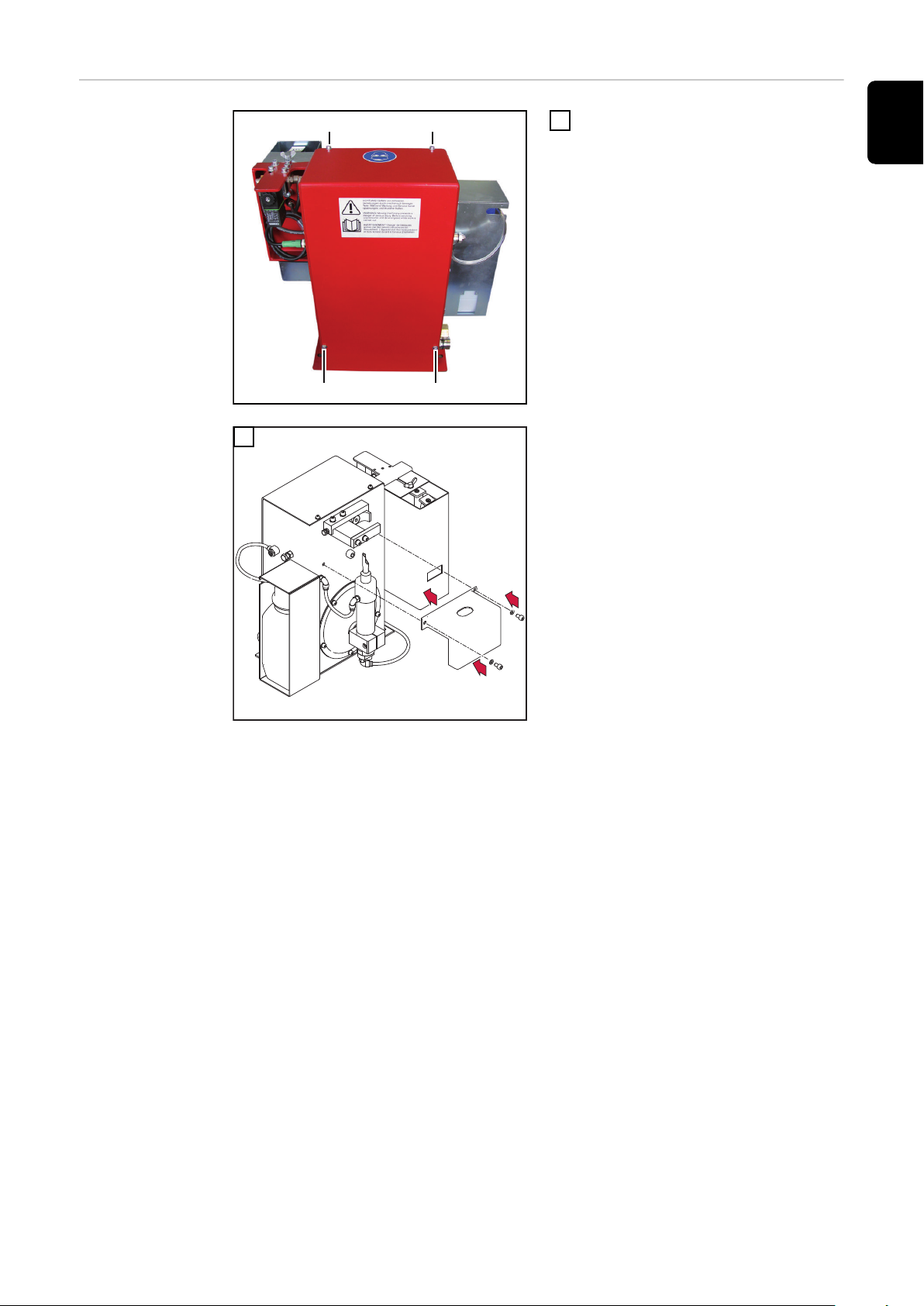
将清洁设备用螺钉
拧到底面上
危险!
机器翻倒或掉落时存在危险。
此时可能导致严重的人身伤害和财产损失。
根据底面(地基)类型的不同,可能需要不同的配件来安装设备。
▶
所提供的配件只能用于厚度小于等于 5 mm (0.197 in.) 的底面(地基)上。
▶
切勿使用所提供的配件在厚度超过 5 mm (0.197 in.) 的底面(地基)上安装设备。在
▶
这种情况下,安装人员负责选择合适类型的配件。
将清洁设备放置在水平、坚固且无振动的表面(地基)上
1
-
放置清洁设备,使机器人行进到清洁位置的距离尽可能短
30

4 x
如图所示,将飞溅托盘放置在清洁设备
2
上
对于厚度小于 5 mm (0.197 in.) 的底面(地
基):
如图所示,使用所提供的配件,将清洁
3
设备和飞溅托盘牢固地拧到底面(地
基)上
对于厚度大于 5 mm (0.197 in.) 的底面(地基),或与上图所示不同的安装:
使用所选的适当配件将清洁设备和飞溅托盘牢固地拧到底面(地基)上
3
ZH
31
安装清洁刀具
安装清洁刀具
小心!
清洁刀具在使用期间温度上升时存在危险。
此时可能导致严重烧伤。
在处理清洁刀具前,请先将其冷却至室温(+25 °C,+77 °F)。
▶
小心!
不兼容易损件可能会带来危险。
此时可能导致财产损失和功能故障。
只能使用制造商提供的导电嘴、气体喷嘴和清洁刀具。对于因使用第三方制造商的导
▶
电嘴、气体喷嘴或清洁刀具所造成的损坏,伏能士概不负责。
供货范围不包括清洁刀具。在备件清单中为所用焊枪查找合适的清洁刀具: https://
spareparts.fronius.com/
从清洁设备上拆下防护盖板
1
2
32
将防护盖板安装于清洁设备上以使其再次返回初始位置
3
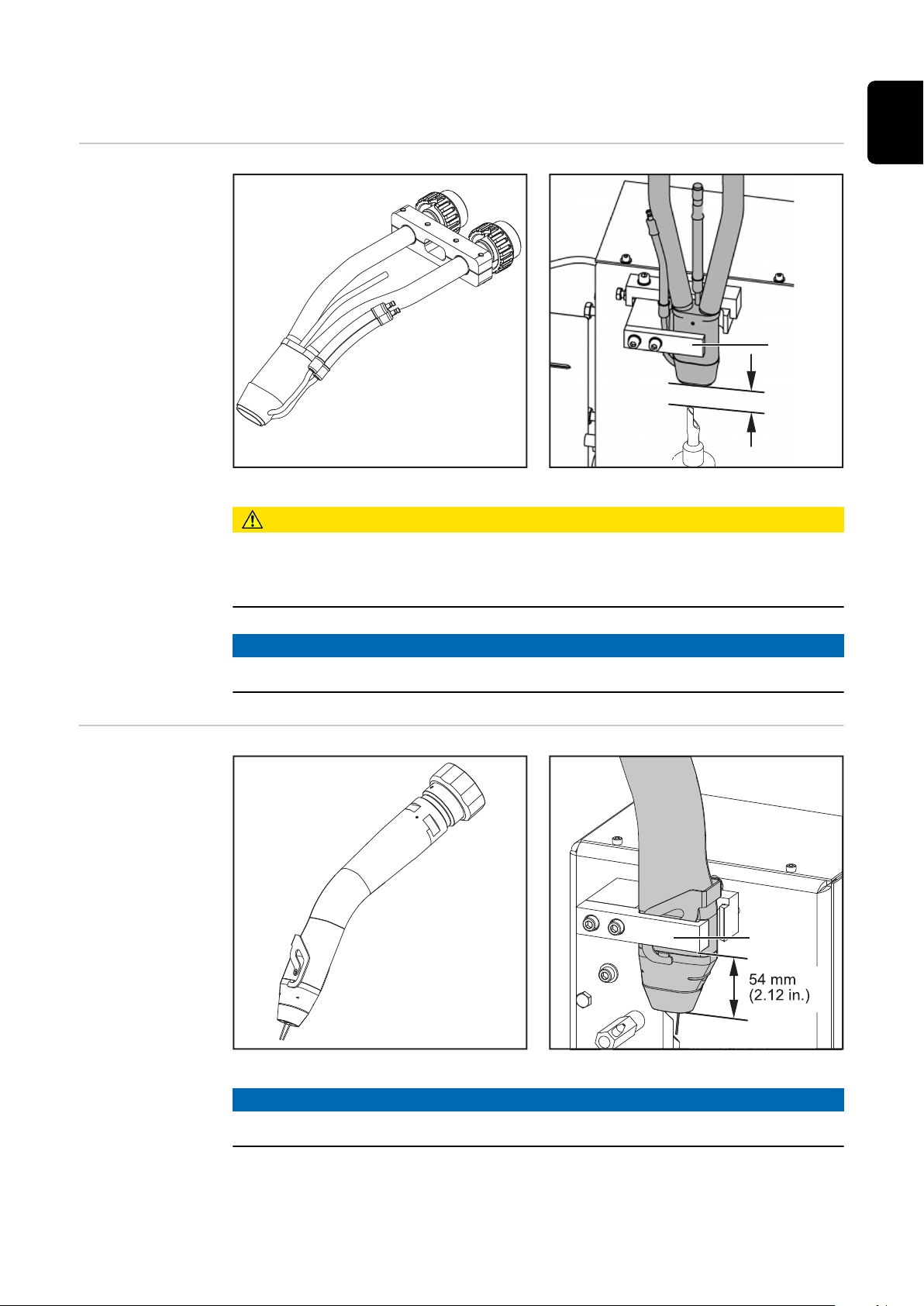
焊枪清洁位置
10 mm
(0.39 in.)
(1)
(1)
外置冷却剂管线焊
枪的清洁位置
ZH
内置冷却剂管线焊
枪的清洁位置
外置冷却剂管线焊枪
小心!
焊枪位置不正确时存在危险!
这可能会损坏焊枪上的冷却剂管线。
确保气体喷嘴上的冷却剂管线不会在将焊枪插入或拔出气体喷嘴夹紧设备时被损坏。
▶
注意!
气体喷嘴须位于支架 (1) 的内部。
清洁位置
内置冷却剂管线焊枪
注意!
气体喷嘴须位于支架 (1) 的内部。
清洁位置
33

安装内置冷却剂管线焊枪的夹紧系统
2
1
1
1
1
1
3
3
4
6
5
所需工具
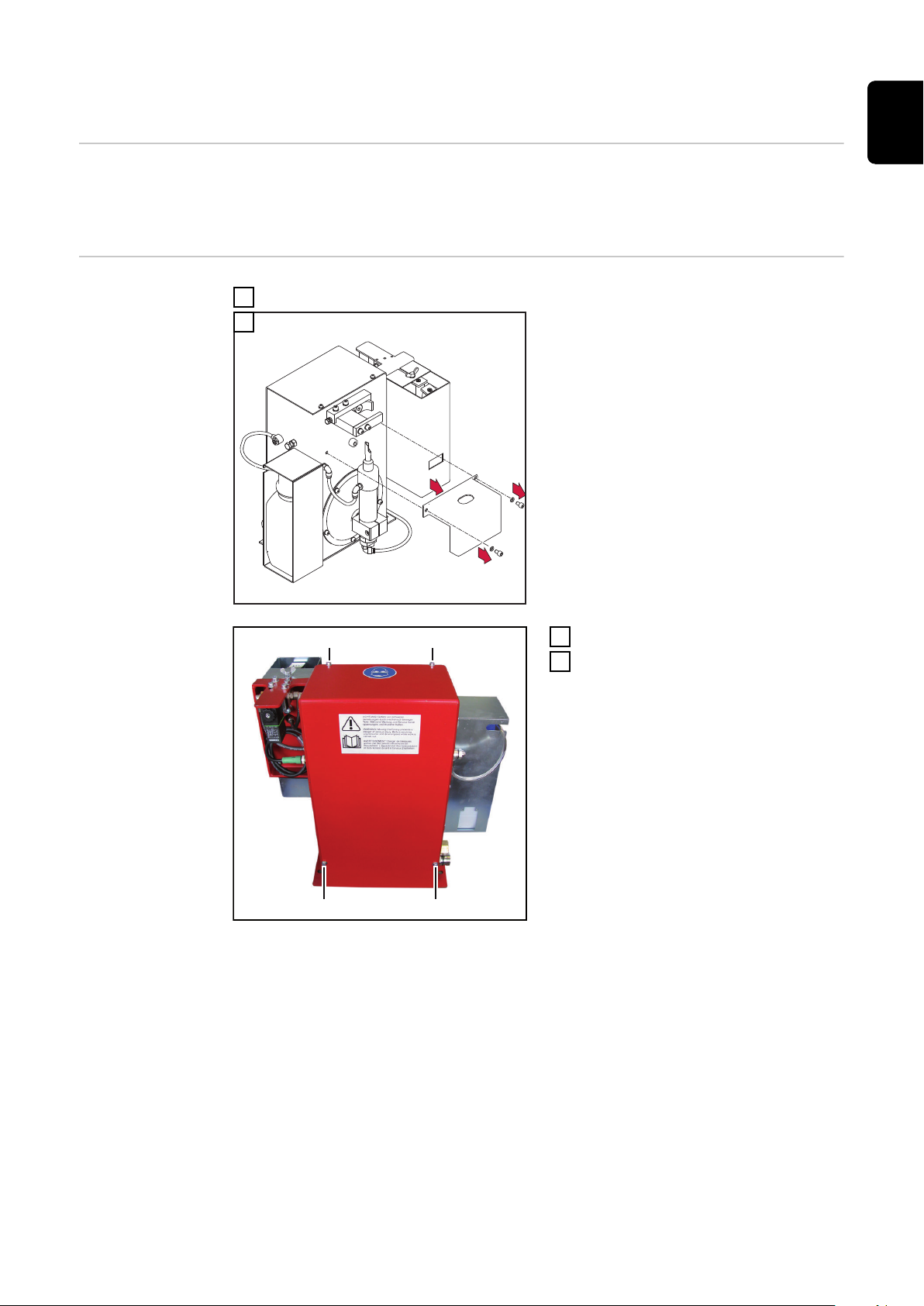
拆下现有夹紧系统
-
内六星改锥,TX25
-
3 mm & 5 mm 内六角扳手
松开 5 个内六角螺钉
1
螺钉尺寸为 3 mm
拆下外壳盖
2
松开 2 个内六角螺钉
3
螺钉尺寸为 5 mm
拆下 3 件式夹紧设备元件
4
拆下内六角埋头螺钉
5
螺钉尺寸为 5 mm
拆下夹紧设备元件
6
34
安装 Twin 夹紧系
1
2
2
3
3
4
4
统
使用 M8 x 25 mm 内六角埋头螺钉固定
1
夹紧设备元件
螺钉尺寸为 5 mm
插入两个 3 x 12 mm 销钉
2
ZH
组装夹紧设备元件
3
使用两个垫圈和两个 M6 x 25 mm 内六
4
角螺钉将夹紧设备元件拧在一起
螺钉尺寸为 5 mm
35

5
5
5
使用两个 M6 x 16 mm 内六角螺钉安装
0
,5 mm
8
7
8
8
8
8
5
夹紧设备元件
螺钉尺寸为 5 mm
确保夹紧设备元件之间有大约 0.5 mm
6
的间隙。
安装外壳盖
7
使用五个 M4 x 8 mm 内六角螺钉固定
8
外壳盖
螺钉尺寸为 3 mm
36
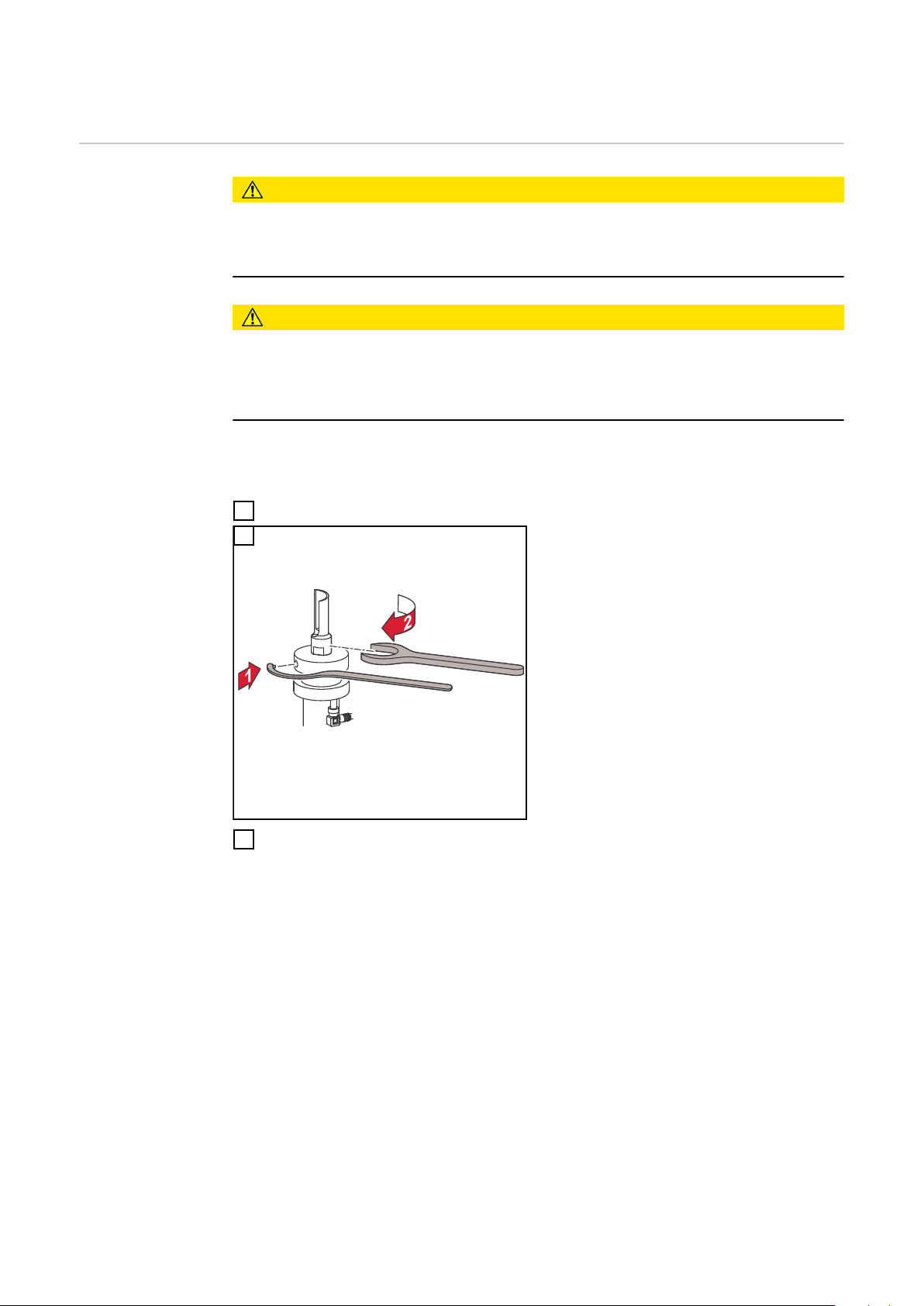
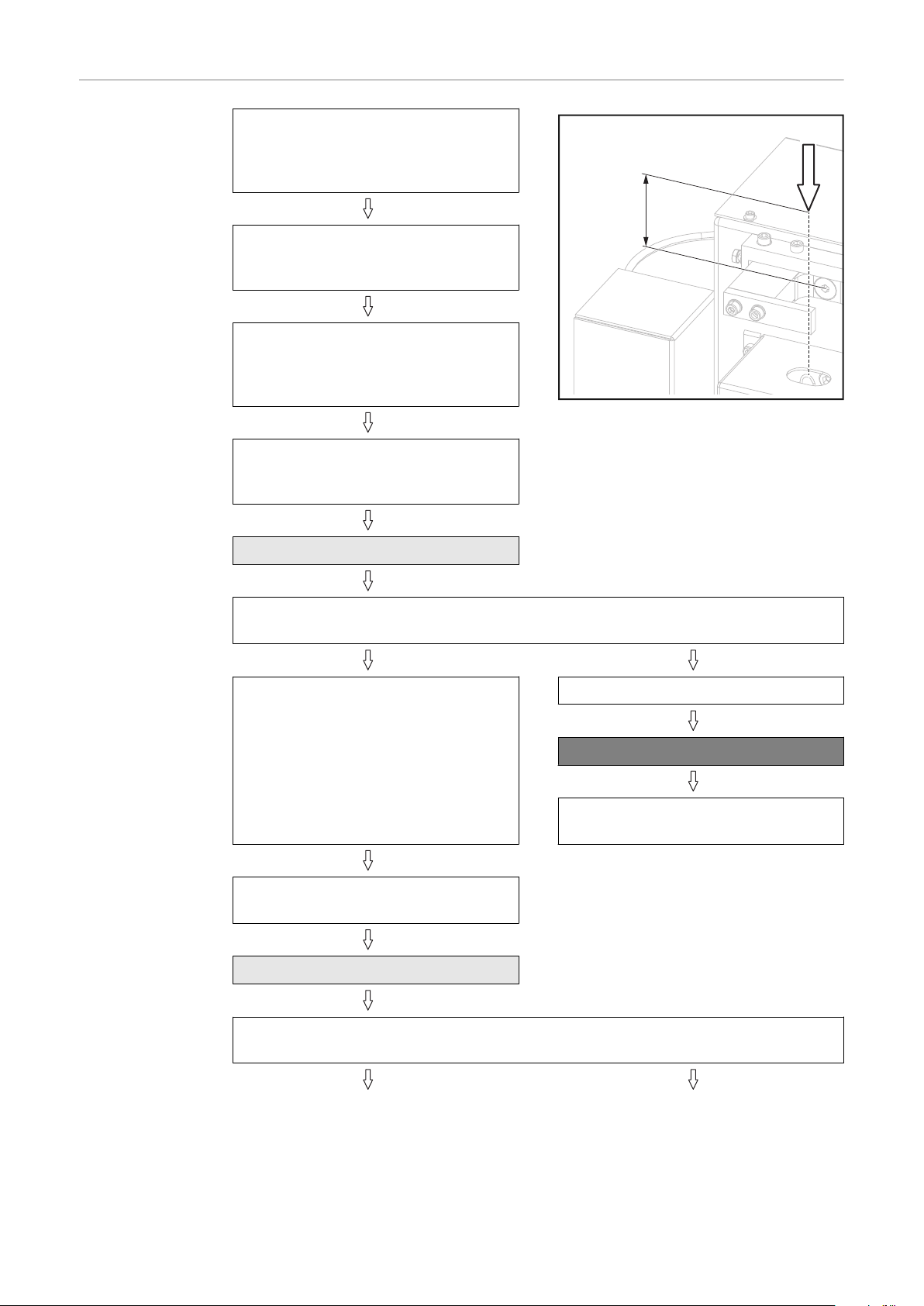
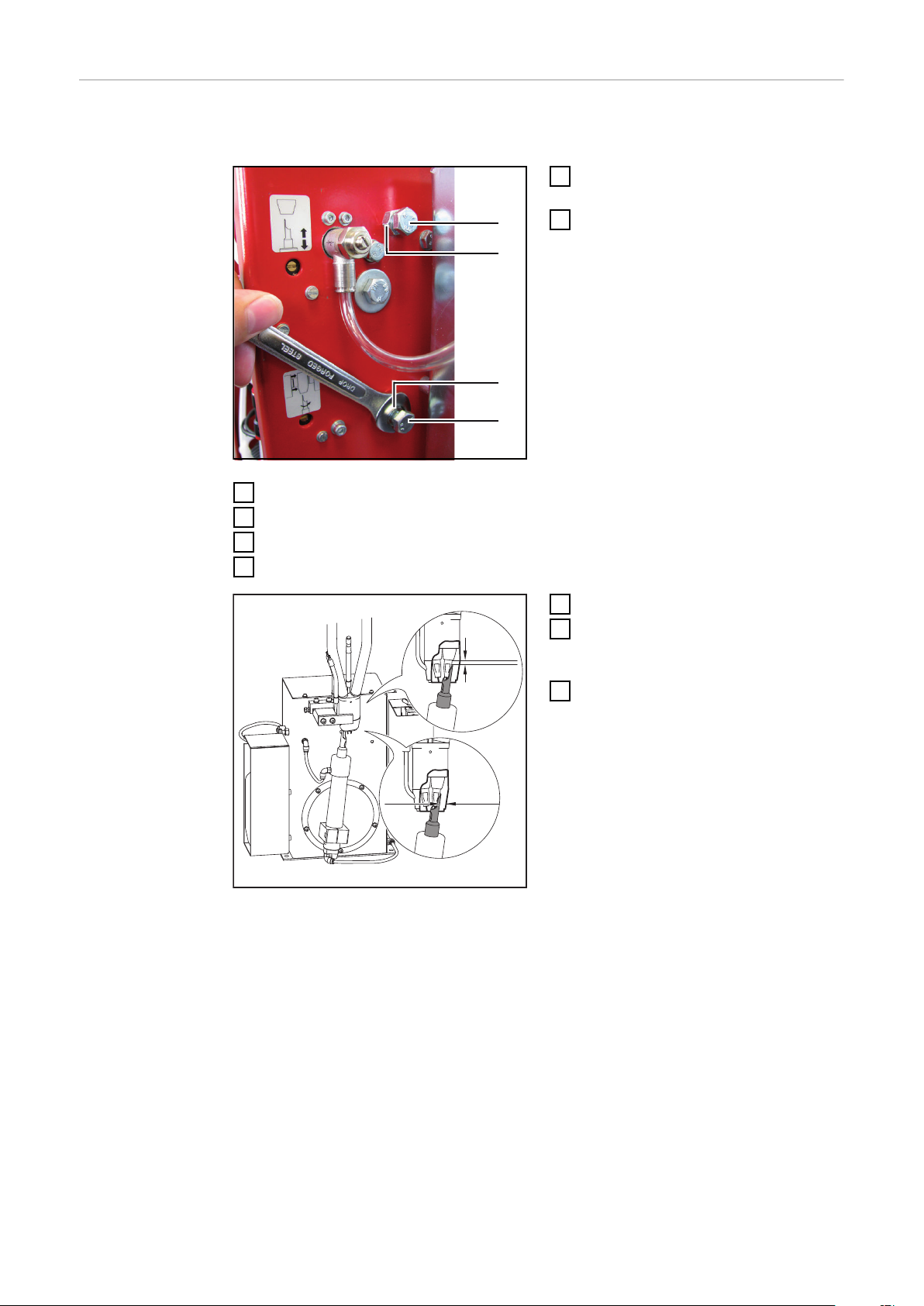
调整提升设备
1
2
1
调整提升设备 为了更容易地调整提升设备,建议将以下调整辅助设备之一安装在枪颈上:
-
Robacta Twin 500 调整辅助设备,项目编号 42,0001,5559
-
Robacta Twin 900 调整辅助设备,项目编号 42,0001,5560
因为焊枪夹在气体喷嘴上方,在气体喷嘴打开时,不需要使用调整辅助设备。可以事先拆
下气体喷嘴。支架必须回到初始位置。安装气体喷嘴时,必须关闭支架。
注意!
确保气体喷嘴上的冷却剂管线不会被正在延伸/回抽的气体喷嘴夹紧设备所损坏。
确保提升设备处于其最低提升位置
1
将焊枪移至清洁位置
2
ZH
3
37

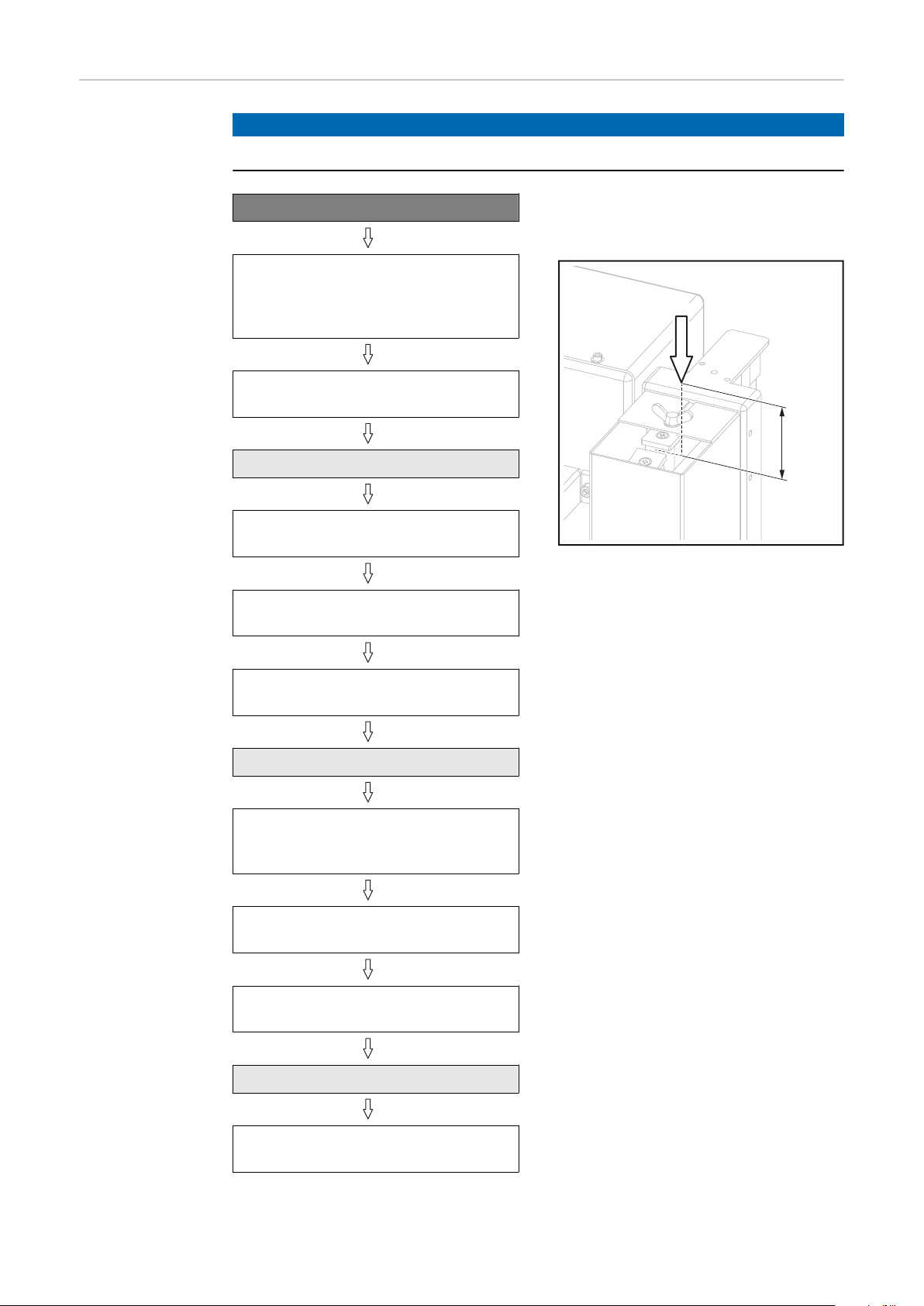
(3)
(2)(4)
(5)
0,5-1mm
.02-.04in.
拧松提升设备上的内六角螺钉 (2)
1
2
2
4
用手将提升设备 (3) 推至其最高提升位
5
置并固定到位
用手将清洁电机 (4) 和清洁刀具推至清
6
洁位置 (5)
注意!
清洁刀具不得接触任何焊枪部件。
在提升设备 (3) 中的此位置固定清洁电
7
机 (4) - 紧固提升设备上的内六角螺钉
(2)
8
38

安装压缩空气供应
ZH
借助压缩空气安全
阀功能建立清洁设
备的压缩空气供应
建立压缩空气供应:
断开清洁设备的压缩空气供应,并确保在清洁设备上执行下述任务时压缩空气供应保
1
持断开状态
将所提供的压缩空气安全阀固定于清洁设备上的压缩空气接口处
2
将压缩空气供应连接至压缩空气安全阀
3
可通过来回移动压缩空气安全阀来中断和恢复清洁设备的压缩空气供应 - 请参见以下说
明。
下图显示的是压缩空气安全阀关闭时的情形,此时清洁设备的压缩空气供应中断:
压缩空气安全阀关闭
下图显示的是压缩空气安全阀开启时的情形,此时清洁设备的压缩空气供应恢复:
压缩空气安全阀打开
39

启动分离剂雾化器
填灌分离剂容器
(1 升),并连接
到清洁设备
注意!
仅使用制造商提供的“Robacta Reamer”分离剂(项目编号 42,0411,8042)。
制造商分离剂的成分专门针对清洁设备而设计。如果使用其他制造商的产品,则无法保证
无故障操作。
1 2
3
40
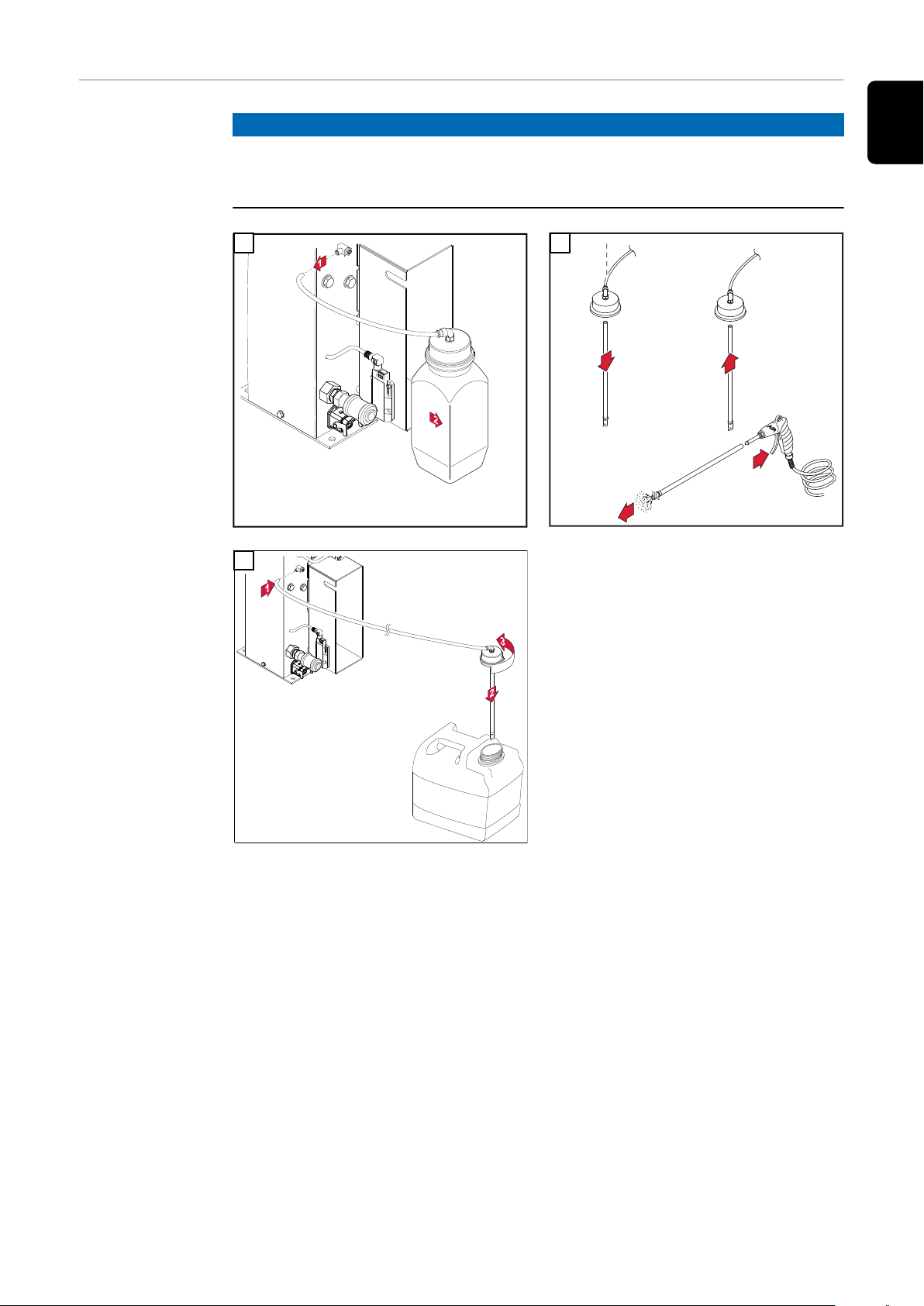
将分离剂容器(10
222222222
*
2
3
4
1
22
33
11
升)连接到清洁设
备
注意!
仅使用制造商提供的“Robacta Reamer”分离剂(项目编号 42,0411,8042)。
该分离剂的成分专门针对清洁设备而设计。如果使用其他制造商的产品,则无法保证无故
障操作。
ZH
1
3
2
*选件(长分离剂软管)
41

调整分离剂雾化器
1
-
+
喷射量
注意!
为确保正确调整喷射量,焊枪须处于清洁位置。
为清洁设备提供压缩空气
1
将清洁设备连接至机器人控件
2
使用机器人控件开始喷射过程,并检查是否有足够的喷射量
3
如果喷射量不足,则根据需要增加喷射量
4
-
通过使用机器人控件来调整喷射时间 - 建议使用 0.7 秒左右的喷射时间 (仅适用于
Robacta Reamer V)
-
或使用分离剂调节器来调整喷射时间 - 请参阅下图
在分离剂调节器上微调喷射量
42

使用液位控制传感器
(1)
(2)
(3)
57
15 3,2
4,2
28
36
13
24
3,2
mm
2.24
0.59 0.13
0.17
1.10
1.42
0.51
0.94
0.13
inch
ZH
可选的液位控制传
感器
传感器上的控件及
指示灯
注意!
液位控制传感器仅作为选件提供。
一旦分离剂容器中的冷却剂液位降至指定液位以下,液位控制传感器就会发出信号。
(1) “OUT OFF(输出关闭)”按钮
用于为传感器编程
(2) “OUT ON(输出开启)”按钮
用于为传感器编程
(3) LED
显示传感器运行状态
-
LED 点亮/闪烁:传感器已激活
-
LED 点亮/未闪烁:传感器未激
活
安装适配器钻孔尺
寸
43

安装液位控制传感
(3)
(1)
(2)
(1)
(2)
1
2
**
1
2
****
1
1
1
1
器
1
注意!
首先将传感器的上部压入安装适配器,如图
所示 - 安装适配器上的接口 (1) 须纳入传感
器的凹槽 (2) 中。
当传感器的上部在安装适配器中正确对齐
时,将传感器完全压入安装适配器 - 安装适
配器上的闩锁 (3) 须弹回并扣住传感器(可
闻传感器啮合之声)。
2
3
* 使用传感器随附的紧固件。
将安装适配器和传感器拧到分离剂容器外壳
上
** 紧固件不在传感器/安装适配器的供
货范围内。安装人员负责选择合适
类型的紧固件。
注意!
确保紧固件不会损坏分离剂容器。
44

校准空状态
20 mm (0.79 in.)
2 - 6 s
> 6 s
排空分离剂容器,直到分离剂液位至少
1
低于传感器 20 mm (0.787 in.)
为传感器提供电源
2
按下“OUT OFF(输出关闭)”按钮 2
3
至 6 秒钟
-
传感器上的 LED 灯缓慢闪烁
-
松开“OUT OFF(输出关闭)”按
钮后,LED 灯熄灭 - 传感器检测到
液位较低
ZH
校准满状态
以分离剂填灌分离剂容器
1
按住“OUT OFF(输出关闭)”按钮至
2
少 6 秒
-
传感器 LED 灯起初缓慢闪烁,6 秒
后闪速更快
-
松开“OUT OFF(输出关闭)”按
钮后,LED 灯熄灭 - 传感器检测到
液位较高
45

锁定/解锁液位控制
10 s
10 s
1
1
2
3
3
4
4
1
3
4
L-
L+
L-
L+
传感器
注意!
可锁定液位控制传感器,以防意外调整。
锁定液位控制传感器:
同时按下“OUT OFF(输出关闭)”和“OUT ON(输出开启)”按钮至少 10 秒
1
-
LED 灯的状态将暂时改变
-
如果锁定时 LED 灯亮起,则锁定后将暂时熄灭
-
如果锁定时 LED 灯未亮起,则锁定后将暂时亮起
解锁液位控制传感器:
同时按下“OUT OFF(输出关闭)”和“OUT ON(输出开启)”按钮至少 10 秒
1
-
LED 灯的状态将暂时改变
-
如果解锁时 LED 灯亮起,则解锁后将暂时熄灭
-
如果解锁时 LED 灯未亮起,则解锁后将暂时亮起
电气连接
焊丝颜色:
1. 棕色
3. 蓝色
4. 黑色
46

手动检查清洁设备功能:
0
1
2
1
1
ZH
安全标识
手动检查功能
危险!
为完成以下任务,必须为清洁设备提供压缩空气。在这种情况下,旋转的清洁刀具、清洁
电机上下移动、气体喷嘴夹紧装置移入/移出、处于激活状态的切丝机、飞散物(刨花
等)、从分离剂喷嘴逸出的压缩空气/分离剂混合物可能会带来危险。
此时可能导致严重的人身伤害和财产损失。
使您的身体(特别是手部、脸部和头发)、任何物体和所有衣物均远离清洁刀具、清
▶
洁电机、提升装置、气体喷嘴夹紧装置、切丝机和分离剂喷嘴。
佩戴听力防护用品。
▶
佩戴带侧面保护的护目镜。
▶
注意!
当“提升设备上/下”、“喷射分离剂”和“夹紧气体喷嘴/清洁电机开启”螺钉的凹槽处
于水平位置时,功能将停用。
从机器人控件上断开清洁设备
1
为清洁设备提供压缩空气
2
执行功能时,须检查以下各项:
-
气体喷嘴夹紧设备的功能(气体喷嘴夹紧设备延伸/回抽)
-
清洁电机的功能(清洁电机 OFF/ON(关闭/打开))
3
夹紧气体喷嘴/清洁电机开启
执行该功能时,须检查以下各项:
-
清洁刀具插入气体喷嘴的距离(提升设备向上/向下移动)
4
禁用这些功能
47

0
1
2
1
5
1
0
1
2
1
1
6
提升设备上/下
执行该功能时,须检查以下各项:
-
分离剂出口(喷入分离剂)
7
喷入分离剂
禁用该功能
8
禁用该功能
48

启动清洗设备
启动先决条件 在启动清洁设备之前,必须满足以下要求:
-
已用螺栓将清洁设备固定到底面上
-
安装清洁刀具
-
调整提升设备
-
启动分离剂雾化器
-
建立压缩空气供应
-
已手动检查功能
-
清洁设备已连接到机器人控件
调试 清洗设备的启动需借助于源自机器人控制器的激活信号。
ZH
49

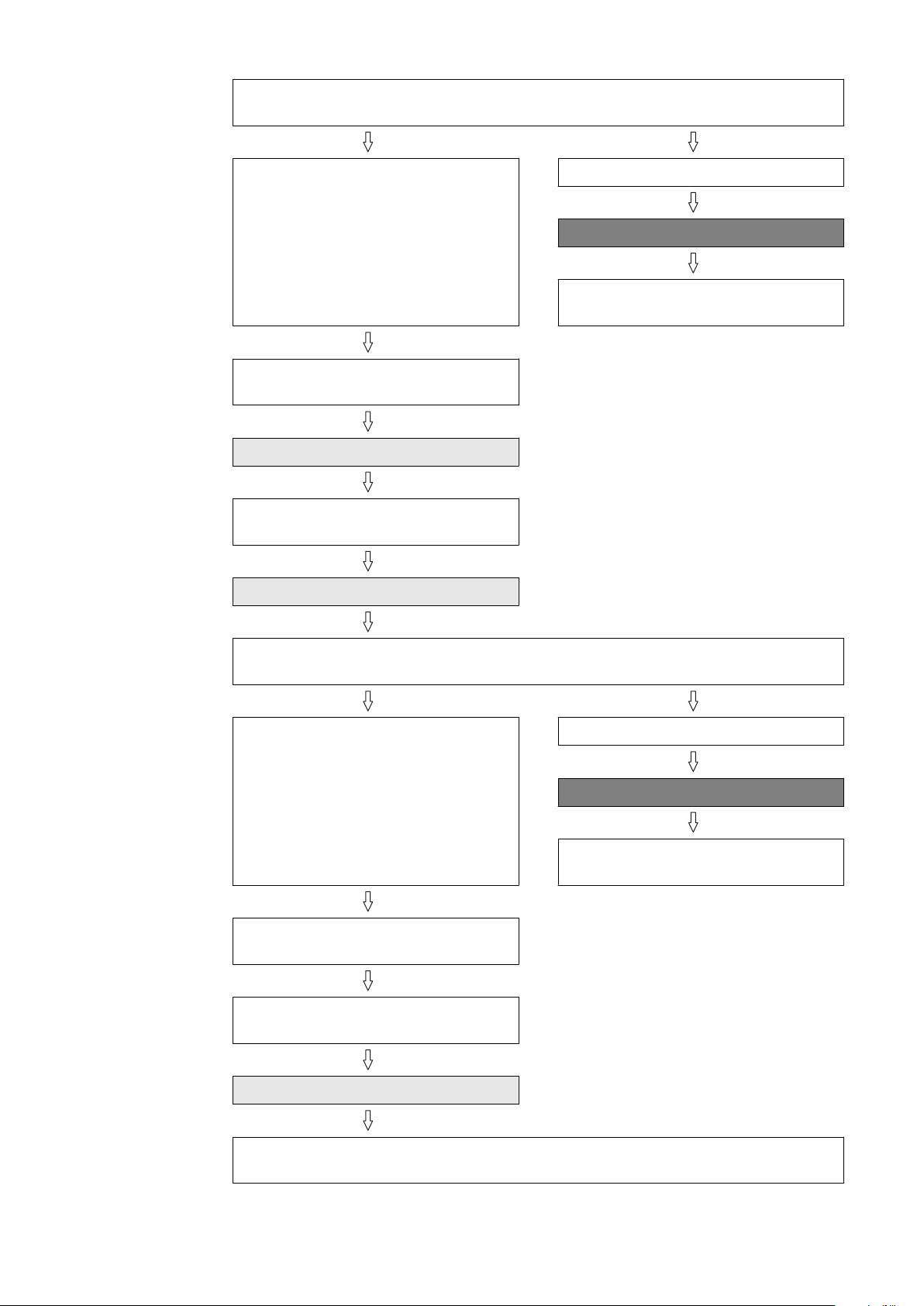
清洗程序顺序
安全标识
小心!
安装及调试不当时存在危险。
此时可能导致财产损失。
在启动自动操作前,必须手动检查清洁设备的各项功能。
▶
仅当正确安装并调试好清洁设备后才允许启动自动模式。
▶
注意!
如果尚未在焊枪内部涂抹润湿剂,则在焊接开始后可能会给焊枪造成永久性污染。
在开始自动模式前,务必先使用制造商提供的分离剂湿润焊枪内部。
▶
50

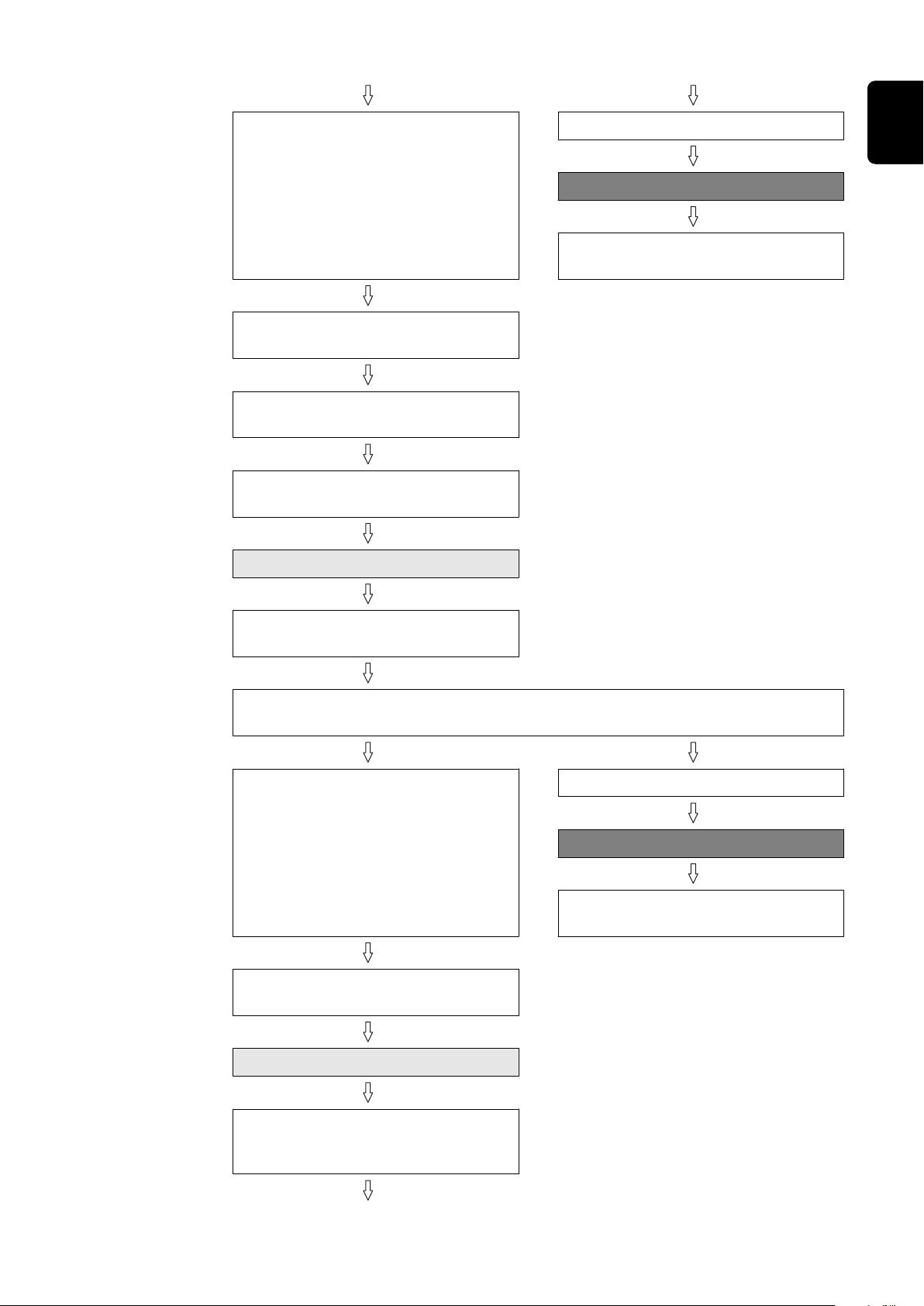
清洁程序顺序 - 概
A
B
50 mm
1.97 in.
50 mm
1.97 in.
述
注意!
每次开始焊接时都要完成完整的清洁程序。
清洁程序顺序由以下子流程组成:
1.切丝机 - 位置 A
2.“分离剂液位”查询(选项)
3.“清洁电机已调低”查询
4.“气体喷嘴自由”查询
5.清洁 - 位置 B
ZH
位置 A = 切丝机,位置 B = 清洁
51
1.切丝机
A
50 mm
1.97 in.
注意!
每次开始焊接时都要执行完整的清洁周期。
开始
从位置 A 开始
切丝机上方约 50 mm / 1.97 in.(刀片
和金属盖之间)
速度:高速模式
设置
电源信号“开始送丝”
等待约 0.5 秒
重置
电源信号“开始送丝”
将焊丝插入切丝机刀片
速度: 50 cm/min / 19.69 ipm
设置
外部信号“切割焊丝”
等待 0.5 秒
垂直向上移动
切丝机刀片上方约 50 mm / 1.97 in.
速度:50 cm/min / 19.69 ipm
重置
外部信号“切割焊丝”
设置
电源信号“回抽焊丝”
等待约 2 - 3 秒
52
重置
电源信号“回抽焊丝”

下一个程序步骤:
2.“分离剂液位”查询(选项)
ZH
2.“分离剂液位”
查询(选项)
“分离剂液位正常”查询:
低或高
“分离剂液位正常”查询 = 高
下一个程序步骤:
3.“清洁电机已调低”查询
“分离剂液位正常”查询 = 低
故障信息:
重新注入分离剂
53

3.“清洁电机已调
低”查询
“清洁电机已调低”查询:
低或高
“清洁电机已调低”查询 = 低
设置
外部信号“清洁电机向上”
“清洁电机已调低”查询 = 高
下一个程序步骤:
4.“气体喷嘴自由”查询
重置
外部信号“清洁电机向上”
“清洁电机已调低”查询:
低或高
“清洁电机已调低”查询 = 低
故障信息:
清洁电机未调低
等待 0.5 秒
停止
54
4.“气体喷嘴自
由”查询
“气体喷嘴自由”查询:
低或高
“气体喷嘴自由”查询 = 低
设置
外部信号“夹紧气体喷嘴,清洁电机开
启”
ZH
“气体喷嘴自由”查询 = 高
下一个程序步骤:
5.清洗
重置
外部信号“夹紧气体喷嘴,清洁电机开
启”
“气体喷嘴自由”查询:
低或高
“气体喷嘴自由”查询 = 低
故障信息:
气体喷嘴已夹紧
等待 0.5 秒
停止
55
5.清洗
B
50 mm
1.97 in.
从位置 B 开始
气体喷嘴夹紧设备上方约 50 mm / 1.97
in.
速度:高速模式
移入气体喷嘴夹紧设备
详情见第 33 页。
速度: 10 cm/s (236.22 ipm)
将焊枪放入夹紧设备:
气体喷嘴须位于支架的内部。
设置
外部信号“夹紧气体喷嘴,清洁电机开
启”
等待 0.5 秒
“气体喷嘴已夹紧”查询:
低或高
“气体喷嘴已夹紧”查询 = 高
设置
外部信号“向右旋转”
等待 0.5 秒
“旋转机构向右”查询:
低或高
“气体喷嘴已夹紧”查询 = 低
故障信息:
气体喷嘴未夹紧
停止
56

“旋转机构向右”查询 = 低
“旋转机构向右”查询 = 高
设置
电源信号“通过焊枪吹压缩空气”
设置
外部信号“清洁电机向上”
(= 开始清洁)
等待 3 秒
“清洁电机上升”查询:
低或高
故障信息:
旋转机构未向右
ZH
停止
“清洁电机上升”查询 = 高
重置
外部信号“清洁电机向上”
重置
电源信号“通过焊枪吹压缩空气”
设置
外部信号“喷射分离剂”
等待 0.5–0.7 秒
“清洁电机上升”查询 = 低
故障信息:
清洁电机未完全上升
停止
重置
外部信号“喷射分离剂”
57
“清洁电机已调低”查询:
低或高
“清洁电机已调低”查询 = 低
“清洁电机已调低”查询 = 高
重置
外部信号“向右旋转”
等待 0.5 秒
设置
外部信号“向左旋转”
等待 0.5 秒
“旋转机构向左”查询:
低或高
故障信息:
清洁电机未完全调低
停止
“旋转机构向左”查询 = 高
设置
电源信号“通过焊枪吹压缩空气”
设置
外部信号“清洁电机向上”
等待 3 秒
“清洁电机上升”查询:
低或高
“旋转机构向左”查询 = 低
故障信息:
旋转机构未向左
停止
58
“清洁电机上升”查询 = 低
ZH
“清洁电机上升”查询 = 高
重置
外部信号“清洁电机向上”
重置
电源信号“通过焊枪吹压缩空气”
设置
外部信号“喷射分离剂”
等待 0.5–0.7 秒
重置
外部信号“喷射分离剂”
故障信息:
清洁电机未完全上升
停止
“清洁电机已调低”查询
低或高
“清洁电机已调低”查询 = 高
重置
外部信号“向左旋转”
等待 0.5 秒
“清洁电机已调低”查询 = 低
故障信息:
清洁电机未完全调低
停止
重置
外部信号“夹紧气体喷嘴,清洁电机开
启”
59

等待 0.5 秒
“气体喷嘴自由”查询:
低或高
“气体喷嘴自由”查询 = 低
“气体喷嘴自由”查询 = 高
移出气体喷嘴夹紧设备
速度:10 cm/s (236.22 ipm)
结束
故障信息:
气体喷嘴已夹紧
停止
60

清洁信号波形
0,5 s
2,0 s
ca. 3 s
ca. 3 s
1,5 s
2,0 s
0,7 s
0,7 s
0,5 s
1.
2.
3.
4.
5.
信号输入
1. 气体喷嘴已夹紧:
2. 向右移动旋转机构:
3. 向左移动旋转机构:
4. 洁电机向上:
5. 喷射分离剂:
ZH
信号输出
气体喷嘴自由:
气体喷嘴已夹紧:
清洗电机已调低:
清洁电机已上升:
旋转机构向右:
旋转机构向左:
未使用时间定义的
信号
分离剂液位正常:
61

信号波形:切丝机
(输入与输出)
切割焊丝输入信号:
62

维护、保养和废料处理
63

64

安全
安全 对于“维护、保养和处置”部分中描述的所有工作,请遵守以下安全规程。
危险!
误操作及工作不当时存在危险。
此时可能导致严重的人身伤害和财产损失。
仅接受过培训且有资质人员方可执行本操作说明书中所述的全部操作。
▶
仅接受过培训且有资质人员方可使用本操作说明书中所述的全部功能。
▶
在您完整阅读并充分理解以下文档前,请勿进行任何相关工作或使用任何相关功能:
▶
这些操作说明书和
系统组件的所有操作说明书,特别是安全规程。
危险!
机器自动启动时存在风险!
此时可能导致严重的人身伤害和财产损失。
除了本操作说明书外,还必须遵守机器人和焊接系统制造商所制定的安全规程。
▶
请确保在进入机器人工作区域时采取所有的有效防护措施。
▶
ZH
危险!
机械部件、飞散物(刨花等)以及从分离剂喷嘴逸出的压缩空气/分离剂混合物存在危险。
此时可能导致严重的人身伤害。
在清洁设备或连接的系统组件上进行任何工作前,请从清洁设备和连接的系统组件上
▶
断开客户的压缩空气供应和电源,并确保其在工作完成之前均保持断开状态。
重要!请遵守“确保清洁设备已减压”部分 - 见第 28 页。
危险!
清洁设备电源和/或压缩空气供应存在危险!
以下情况可能导致严重的人身伤害:
清洁刀具正在旋转
提升设备正在上下移动
气体喷嘴夹紧设备正在延伸/回抽
切丝机已启动
飞散物(刨花等)
从分离剂喷嘴逸出的压缩空气/分离剂混合物
如果必须在为清洁设备提供电压和/或压缩空气的情况下对其进行操作:
使您的身体(特别是您的手部、脸部和头发)、任何物体和所有衣物均远离清洁刀
▶
具、提升设备、气体喷嘴夹紧设备、切丝机和分离剂喷嘴
佩戴耳部护具
▶
佩戴带侧面保护的护目镜
▶
小心!
清洁刀具在使用后所带有的高温存在危险。
此时可能导致灼伤。
在处理清洁刀具前,请将清洁刀具冷却至室温(+25 °C,+77 °F)。
▶
65
维护、保养和废料处理
概要 本清洗设备通常不需要维护。然而,为了确保清洗设备能够始终处于正常运转状态,我们
仍需要进行一些保养和维护工作:
每次启动前
每日
每周
-
检查分离剂容器中的填充液位,必要时予以加满
-
检查分离剂收集容器中的填充液位,必要时予以排空
-
检查清洁刀具是否磨损,必要时予以更换
-
排空清洁设备的收集容器
-
排空切丝机的收集容器(若有)
-
一般情况下,您应该对清洁设备进行目检,并确保任何损坏均能够立即得到修复(在
调试之前)
小心!
含有溶剂的清洁剂可能会带来危险。
此时可能导致财产损失。
仅使用不含溶剂的清洁产品清洗清洁设备。
▶
清除设备上沉积的分离剂和污染物。
1
小心!
含有溶剂的清洁剂可能会带来危险。
此时可能导致财产损失。
仅使用不含溶剂的清洁产品清洁分离剂容器。
▶
检查分离剂容器是否存在污染并根据需要予以清洁。
1
使用进气软管并借助压缩空气从内向外吹扫分离剂容器中的进气过滤器(有关详细信
2
息,请参阅第 40 页的 启动分离剂雾化器 部分)。
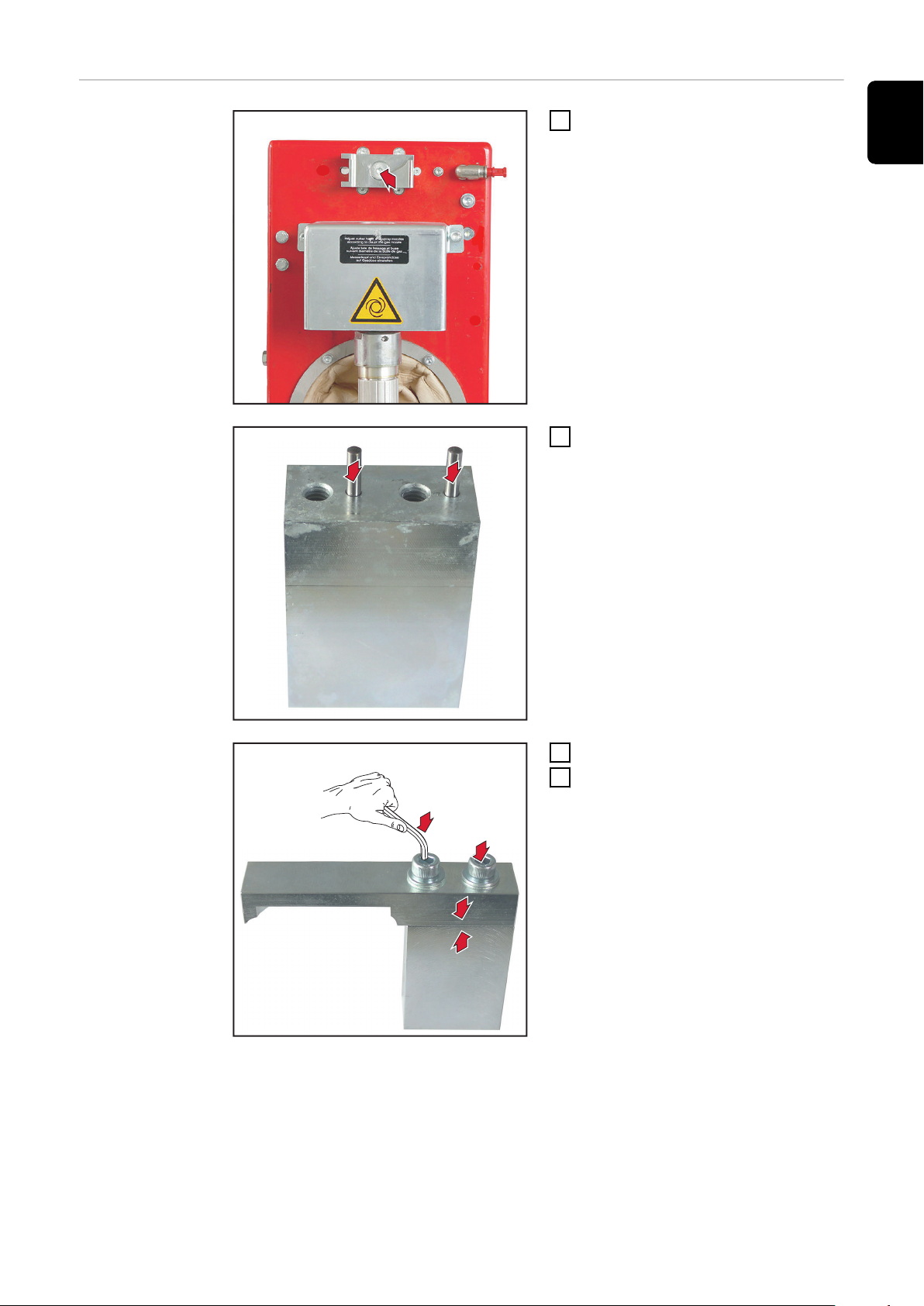
每 6 个月
按需: 打开设备并
废料处理 按照国家和地区的现行法规对废料进行处理。
打开设备并检查气动阀以确保:
1
-
无泄漏现象
-
所有螺钉均拧紧到位
-
所有螺钉接头均可靠固定于气动阀上。
用干燥且经过降压的压缩空气将设备内部吹干净
1
为提升设备提升缸上的导杆涂少许润滑油
2
恢复设备的运行状态。
3
66
调整旋转机构止动角度
1
2
1
(1) (1)
(1)
(1)
概要 为了更容易调整止动角度,建议将下列调整辅助设备之一安装到枪颈上:
-
Robacta Twin 500 调整辅助设备,项目编号 42,0001,5559
-
Robacta Twin 900 调整辅助设备,项目编号 42,0001,5560
ZH
准备工作
将焊枪移动到清洁位置
1
2
松开四个内六角螺钉 (1)
3
拆下清洁设备外壳盖
4
67
调整旋转机构止动
(2)
(3)
(5)
(4)
2-3mm
0.08-0.12in
0,5-1mm
0.02-0.004in
角度
-
止动螺钉 (4) 调整左止动角
-
止动螺钉 (5) 调整右止动角
根据要调整的止动角度,松开螺母 (2)
1
或 (3)
根据要调整的止动角度,松开止动螺钉
2
(4) 或 (5),直到清洁电机可以移动到最
高位置,位于该位置的清洁电机不与焊
枪装备组件接触
手动将清洁电机倾斜到需要调整的一侧并移动到最高位置
3
调整相应的止动螺钉,使清洁刀具不会碰触导电嘴或气体喷嘴
4
使清洁电机返回至最低位置
5
使用之前松开的螺母 (2) 或 (3) 固定止动螺钉
6
手动将清洁电机移至最高位置
7
以手动方式向左和向右倾斜清洁电机
8
-
清洁刀具不得碰触导电嘴或气体喷
嘴
如果清洁刀具接触焊枪部件,则需调整
9
提升设备
68
最后......
(1) (1)
(1)
(1)
1
2
2
使用四个原装螺钉和垫圈 (1) 将清洁设
1
备外壳盖拧紧
1
ZH
69

70

错误诊断和错误排除
71

72

安全
安全 对于“故障排除”部分中描述的所有工作,请遵守以下安全规程。
危险!
误操作及工作不当时存在危险。
此时可能导致严重的人身伤害和财产损失。
仅接受过培训且有资质人员方可执行本操作说明书中所述的全部操作。
▶
仅接受过培训且有资质人员方可使用本操作说明书中所述的全部功能。
▶
在您完整阅读并充分理解以下文档前,请勿进行任何相关工作或使用任何相关功能:
▶
这些操作说明书和
系统组件的所有操作说明书,特别是安全规程。
危险!
机器自动启动时存在风险!
此时可能导致严重的人身伤害和财产损失。
除了本操作说明书外,还必须遵守机器人和焊接系统制造商所制定的安全规程。
▶
请确保在进入机器人工作区域时采取所有的有效防护措施。
▶
ZH
危险!
机械部件、飞散物(刨花等)以及从分离剂喷嘴逸出的压缩空气/分离剂混合物存在危险。
此时可能导致严重的人身伤害。
在清洁设备或连接的系统组件上进行任何工作前,请从清洁设备和连接的系统组件上
▶
断开客户的压缩空气供应和电源,并确保其在工作完成之前均保持断开状态。
重要!请遵守“确保清洁设备已减压”部分 - 见第 28 页。
危险!
清洁设备电源和/或压缩空气供应存在危险!
以下情况可能导致严重的人身伤害:
清洁刀具正在旋转
提升设备正在上下移动
气体喷嘴夹紧设备正在延伸/回抽
切丝机已启动
飞散物(刨花等)
从分离剂喷嘴逸出的压缩空气/分离剂混合物
如果必须在为清洁设备提供电压和/或压缩空气的情况下对其进行操作:
使您的身体(特别是您的手部、脸部和头发)、任何物体和所有衣物均远离清洁刀
▶
具、提升设备、气体喷嘴夹紧设备、切丝机和分离剂喷嘴
佩戴耳部护具
▶
佩戴带侧面保护的护目镜
▶
小心!
清洁刀具在使用后所带有的高温存在危险。
此时可能导致灼伤。
在处理清洁刀具前,请将清洁刀具冷却至室温(+25 °C,+77 °F)。
▶
73

错误诊断和错误排除
程序顺序错误
无法注入分离剂
分离剂容器已满
原因
:
解决方法:
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
注入量过低。
延长注入时间。
分离剂容器内分离剂软管的进气过滤器遭到污染。
使用压缩空气清洁分离剂软管的吸滤器(有关详细信息,请参阅第 40 页的
启动分离剂雾化器 部分)。
机器人无信号。
检查机器人程序。
分离剂喷嘴堵塞。
清洁分离剂喷嘴。
通知服务团队(更换分离剂喷嘴)。
真空泵故障。
联系服务团队(更换真空泵)。
电磁阀存在机械故障。
联系服务团队(更换电磁阀)。
焊枪清洁不佳或损坏严重
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
清洁刀具与导电嘴或气体喷嘴发生碰触
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
提升设备调整不正确
调整提升设备
不适用于焊枪形状的清洁刀具
安装正确的清洁刀具
清洁刀具磨损
更换清洁刀具
提升设备调整不正确
调整提升设备
不适用于焊枪形状的清洁刀具
安装正确的清洁刀具
清洁刀具磨损
更换清洁刀具
旋转机构止动角度不正确
调整旋转机构止动角度
74

提升设备无法上下移动
原因:
解决方法:
压缩空气供应中断。
建立压缩空气供应。
ZH
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
清洁电机无法正常工作
原因:
解决方法:
原因:
解决方法:
原因:
解决方法:
机器人无信号。
检查机器人程序。
电磁阀存在机械故障。
联系服务团队(更换电磁阀)。
节流阀无法调节或存在故障。
联系服务团队(更换节流阀)。
提升缸密封不良。
联系服务团队(更换提升缸)。
压缩空气供应中断。
建立压缩空气供应。
机器人无信号。
检查机器人程序。
清洁电机存在机械故障。
联系服务团队(更换清洁电机)。
原因:
解决方法:
电磁阀存在机械故障。
联系服务团队(更换电磁阀)。
75

76

技术数据
77

78

技术数据
ZH
Robacta Reamer
V Twin
电源电压 + 24 V DC
额定功率 14.4 W
额定压力 6 bar
86.99 psi
空气消耗量 440 l/min
465 qt./min
压缩空气接口螺纹标识 G ¼"
标准 I/O (X1) 输入:+ 24 V DC / 最大 300 mA
输出:+ 24 V DC / 最大 30 mA
清洁时间 7.0 - 7.5 s
总周期时间 8.5 - 10 s
分离剂容器容量 1 l
.0.26 gal. (US)
防护等级 IP 21
合格标记 CE,CSA
安全标识 S
“性能等级” c
最大噪声排放 (LWA) 82 dB (A)
尺寸(长 × 宽 × 高) 225 × 400 × 380 mm
8.86 × 15.75 × 14.96 in.
重量
(不含分离剂)
17 kg
37.48 lb.
79

80

附录
81

82
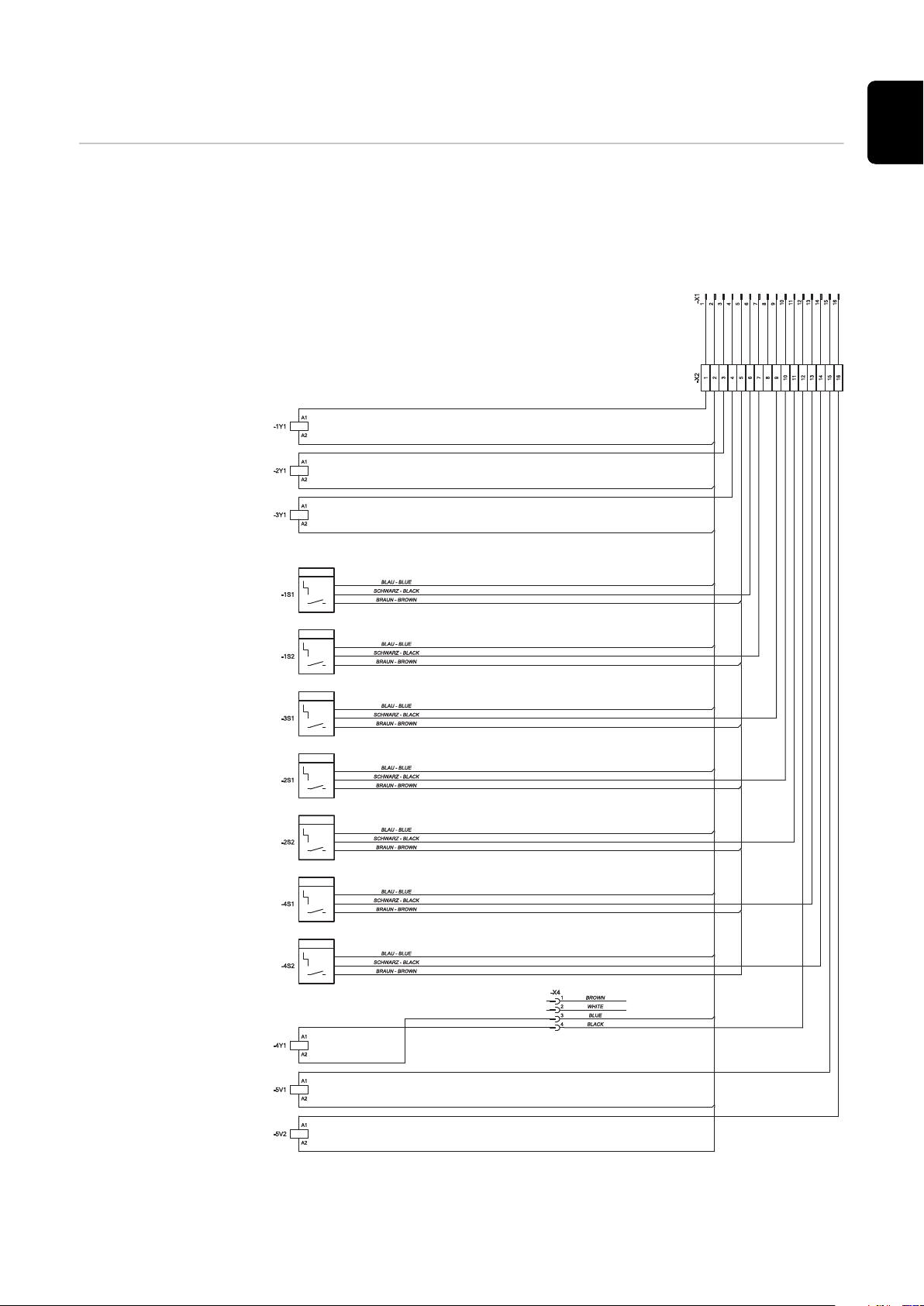
电路图 Robacta Reamer V Twin
GASDÜSE SPANNEN UND REINIGUNGSMOTOR EIN
CLAMP GAS NOZZLE AND CLEANING MOTOR ON
SCHWENKVORRICHTUNG NACH LINKS
MOVE SWIVEL MECHANISM TO THE LEFT
SCHWENKVORRICHTUNG NACH RECHTS
MOVE SWIVEL MECHANISM TO THE RIGHT
SCHWENKVORRICHTUNG LINKS
SWIVEL MECHANISM LEFT
SCHWENKVORRICHTUNG RECHTS
SWIVEL MECHANISM RIGHT
REINIGUNGSMOTOR OBEN
CLEANING MOTOR RAISED
REINIGUNGSMOTOR UNTEN
NICHT BELEGT
NOT ASSIGNED
CLEANING MOTOR LOWERED
REINIGUNGSMOTOR AUF
CLEANING MOTOR UP
Gasdüse spannen und Reinigungsmotor ein
Clamp gas nozzle and Cleaning motor on
Reinigungsmotor auf
Cleaning motor up
Trennmittel einsprühen
Spray parting agent
Reinigungsmotor unten
Cleaning motor lowered
Trennmittel-Stand I.O
Parting agent level OK
Gasdüse gespannt
Gas nozzle clamped
Gasdüse frei
Gas nozzle free
Reinigungsmotor oben
Cleaning motor raised
Schwenkvorrichtung nach rechts
Move swivel mechanism to the right
Schwenkvorrichtung nach links
Move swivel mechanism to the left
Drahtelektrode abschneiden
Cut wire
Schwenkvorrichtung rechts
Swivel mechanism right
Schwenkvorrichtung links
Swivel mechanism left
GND (ALLGEMEIN)
GND (GENERAL)
+24 V DC
TRENNMITTEL EINSPRÜHEN
SPRAY PARTING AGENT
GASDÜSE FREI
GAS NOZZLE FREE
GASDÜSE GESPANNT
GAS NOZZLE CLAMPED
TRENNMITTEL-STAND I.O.
PARTING AGENT LEVEL OK
DRAHTELEKTRODE ABSCHNEIDEN
CUT WIRE
ZH
83

Robacta Reamer V Twin 气动图
GASDÜSE SPANNEN UND REINIGUNGSMOTOR EIN
CLAMP GAS NOZZLE AND CLEANING MOTOR ON
REINIGUNGSMOTOR AUF
CLEANING MOTOR UP
TRENNMITTEL EINSPRÜHEN
SPRAY PARTING AGENT
DRAHTELEKTRODE ABSCHNEIDEN
CUT WIRE
SCHWENKVORRICHTUNG
NACH LINKS / RECHTS
MOVE SWIVEL MECHANISM
TO THE LEFT / RIGHT
6 bar (86.99 psi) GEFILTERTE DRUCKLUFT
6 bar (86.99 psi) FILTERED COMPRESSED AIR
Anschluss Druckluft 1/4 inch
Druckluft-Entlastungsventil 3/2
compressed air relief valve 3/2
solenoid valve 3/2
gas nozzle clamping device
cleaning motor
solenoid valve 5/2
choke check valve
solenoid valve 3/2
choke valve
check valve
wire cutter
solenoid valve 3/2
swivel mechanism for cleaning motor
solenoid valve 5/2
Magnetventil 3/2
Spannvorrichtung Gasdüse
Reinigungsmotor
Magnetventil 5/2
Drosselrückschlagventil
Magnetventil 3/2
Drosselventil
Rückschlagventil
Filter
Vakuumpumpen-Düse Ø 0,8 mm (0.031 inch)
Magnetventil 3/2
Schwenkvorrichtung für Reinigungsmotor
Magnetventil 5/2
Trennmittel-Einsprühdüse Ø 1,6 mm (0.063 inch)
vacuum pump choke Ø 0,8 mm (0.031 inch)
filter
parting agent injection nozzle Ø 1,6 mm (0.063 inch)
Drahtabschneider
Hubvorrichtung mit Motorhalterung
lifting device with motor bracket
compressed air connection 1/4 inch
84

一致性声明
DE German Deutsch EN English English FR French Française
EU-KONFORMITÄTSERKLÄRUNG 2016
EU-DECLARATION OF CONFORMITY 2016
DÉCLARATION UE DE CONFORMITÉ, 2016
Wels-Thalheim, 2016-07-07
eingapmoc aLrerutcafunaMamriF eiD
FRONIUS INTERNATIONAL GMBH
Froniusstaße 1, A-4643 Pettenbach
erklärt in alleiniger Verantwortung,
dass folgendes Produkt:
Robacta Reamer V Twin
Gasdüsenreinigungsgerät
auf das sich diese Erklärung
bezieht, mit folgenden Richtlinien
bzw. Normen übereinstimmt:
Richtlinie 2014/30/EU
Elektromag. Verträglichkeit
Richtlinie 2006/42/EG
Maschinenrichtlinie
Europäische Normen inklusive
zutreffende Änderungen
EN ISO 12100:2010
EN 61000-6-2:2005+AC:2005
EN 61000-6-4:2007+A1:2011
Die oben genannte Firma hält
Dokumentationen als Nachweis der
Erfüllung der Sicherheitsziele und
die wesentlichen Schutzanforderungen zur Einsicht bereit.
Dokumentationsverantwortlicher:
(technische Dokumentation)
Ing. Josef Fe
ichtinger
Günter Fronius Straße 1
A - 4600 Wels-Thalheim
Hereby certifies on its sole
responsibility that the following
product:
Robacta Reamer V Twin
Gas nozzle cleaner
which is explicitly referred to by this
Declaration meet the following
directives and standard(s):
Directive 2014/30/EU
Electromag. compatibility
Directive 2006/42/EC
Machinery Directive
European Standards including
relevant amendments
EN ISO 12100:2010
EN 61000-6-2:2005+AC:2005
EN 61000-6-4:2007+A1:2011
Documentation evidencing
conformity with the requirements of
the Directives is kept available for
inspection at the above
Manufacturer.
person responsible for documents:
(technical documents)
Ing. Josef Feichtinger
Günter Fronius Straße 1
A - 4600 Wels-Thalheim
se déclare seule responsable du fait
que le produit suivant:
Robacta Reamer V Twin
Appareil de nettoyage de buses gaz
qui est l’objet de la présente
déclaration correspondent aux
suivantes directives et normes:
Directive 2014/30/UE
Électromag. Compatibilité
Directive 2006/42/CE
Directive aux machines
Normes européennes avec
amendements correspondants
EN ISO 12100:2010
EN 61000-6-2:2005+AC:2005
EN 61000-6-4:2007+A1:2011
En tant que preuve de la satisfactio
n
des demandes de sécurité la
documentation peut être consultée
chez la compagnie susmentionnée.
responsable documentation:
(technique documentation)
Ing. Josef Feichtinger
Günter Fronius Straße 1
A - 4600 Wels-Thalheim
2016 ppa. Mag.Ing.H.Hackl
Member of Board
Chief Technology Officer
ZH
85

86

ZH
87

 Loading...
Loading...