

Page 1

Operating
Instructions
RI FB PRO/i TWIN Controller
Bedienungsanleitung
DE
42,0426,0299,DE 006-09022023
Page 2

Page 3

Inhaltsverzeichnis
Allgemeines 4
Sicherheit 4
Lieferumfang 4
Umgebungsbedingungen 5
Technische Daten 5
Anschlüsse und Anzeigen am Roboter-Interface 6
Allgemeines 6
Anschlüsse für die Stromquelle und Systemkomponenten 6
Anschlüsse für die Roboter-Steuerung 7
Anzeigen am Roboter-Interface 8
Systemübersicht 9
Systemübersicht 9
Busmodul in das Interface einsetzen und an die Robotersteuerung anschließen 10
Busmodul in das Roboter-Interface einsetzen und an die Roboter-Steuerung anschließen 10
Roboter-Interface montieren und an die Systemkomponenten anschließen 11
Sicherheit 11
Roboter-Interface montieren 11
Prozesslinie 1 an das Interface anschließen 12
Prozesslinie 2 an das Interface anschließen 13
DIP-Schalter 14
Allgemeines 14
Beispiel: Knotenadresse / IP-Adresse einstellen 14
Hinweise zur Spannungsversorgung des Roboter-Interfaces 15
Hinweise zur Spannungsversorgung des Interfaces 15
Fehlerdiagnose 16
Sicherheit 16
LEDs am Print des Roboter-Interfaces 16
DE
3
Page 4

Allgemeines
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen
▶
nur von technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses
▶
Gerätes und aller Systemkomponenten lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Personen- und Sachschäden können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und vom Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
WARNUNG!
Gefahr durch unplanmäßige Signalübertragung.
Schwere Personen- und Sachschäden können die Folge sein.
Über das Interface keine sicherheitsrelevanten Signale übertragen.
▶
Lieferumfang
4
Page 5

Umgebungsbedingungen
VORSICHT!
Gefahr durch unzulässige Umgebungsbedingungen.
Schwere Geräteschäden können die Folge sein.
Das Gerät nur bei den nachfolgend angegebenen Umgebungsbedingungen
▶
lagern und betreiben.
Temperaturbereich der Umgebungsluft:
beim Betrieb: -10 °C bis +40 °C (14 °F bis 104 °F)
-
bei Transport und Lagerung: -20 °C bis +55 °C (-4 °F bis 131 °F)
-
Relative Luftfeuchtigkeit:
bis 50 % bei 40 °C (104 °F)
-
bis 90 % bei 20 °C (68 °F)
-
Umgebungsluft: frei von Staub, Säuren, korrosiven Gasen oder Substanzen,
usw.
Höhenlage über dem Meeresspiegel: bis 2000 m (6500 ft).
DE
Technische Daten
Spannungsversorgung intern (24 V)
Schutzart IP 20
5
Page 6

Anschlüsse und Anzeigen am Roboter-Interface
Allgemeines Auf Grund von kundenspezifischen Anforderungen können Anschlüsse an Ihrem
Gerät verfügbar sein, die in dieser Bedienungsanleitung nicht beschrieben sind
oder umgekehrt.
Auf die Grundfunktionen des Gerätes hat dies jedoch keinen Einfluss.
Anschlüsse für
die Stromquelle
und Systemkomponenten
(1) Anschluss SpeedNet
zur Verbindung mit der 1.
Stromquelle.
Verbindung mittels SpeedNetVerbindungskabel.
(2) Anschluss SpeedNet
zur Verbindung mit weiteren
Systemkomponenten, wie etwa
dem 1. Drahtvorschub.
Verbindung mittels SpeedNetKabel vom VerbindungsSchlauchpaket .
(3) Anschluss SpeedNet
zur Verbindung mit der 2. Stromquelle.
Verbindung mittels SpeedNet-Verbindungskabel.
(4) Anschluss SpeedNet
zur Verbindung mit weiteren Systemkomponenten, wie etwa dem 2. Drahtvorschub.
Verbindung mittels SpeedNet-Kabel vom Verbindungs-Schlauchpaket .
6
Page 7

Anschlüsse für
(1)
(2)
die RoboterSteuerung
Je nach Anforderung, wird das Roboter-Interface mit einer der nachfolgend angeführten Anschlusskonfigurationen ausgeliefert.
Beispiel Konfiguration Basic:
(1) Zugentlastung
Der Kabelbaum der RoboterSteuerung ist durch die Zugentlastung in den Innenraum des
Roboter-Interfaces zu führen,
und direkt am Busmodul anzuschließen.
Beispiel Konfiguration ProfiNet IO, Ethernet/IP-2P, ...:
DE
(2) Anschlüsse des jeweiligen Bus-
moduls
Die Anschlüsse des Busmoduls
werden werksseitig zur Außenseite des Roboter-Interfaces
geführt. Der Kabelbaum der
Roboter-Steuerung kann direkt
an der Außenseite des RoboterInterfaces angeschlossen werden.
7
Page 8

Anzeigen am Ro-
(1)
(2)
(3)
(4)
boter-Interface
(1) LED Heartbeat
Aus:
Offline; keine Versorgungsspannung
Blinkt grün:
Das Betriebssystem des Print
läuft ordnungsgemäß
(2) LED Synchronisation
leuchtet grün:
Stromquellen sind synchronisiert
leuchtet rot:
Stromquellen sind nicht synchronisiert
(3) siehe Beschreibung des jeweiligen Busmoduls
(4) siehe Beschreibung des jeweiligen Busmoduls
8
Page 9

Systemübersicht
(1)
(2)
(3)
(4)
(1)
(2)
(3)
(4)
Systemübersicht
DE
(1) Anschluss / Verbindung Stromquelle 1
(2) Anschluss / Verbindung Drahtvorschub 1
(3) Anschluss / Verbindung Stromquelle 2
(4) Anschluss / Verbindung Drahtvorschub 2
9
Page 10

Busmodul in das Interface einsetzen und an die
Robotersteuerung anschließen
Busmodul in das
Roboter-Interface einsetzen
und an die Roboter-Steuerung
anschließen
1 2
3 4
10
Page 11

Roboter-Interface montieren und an die Systemkomponenten anschließen
Sicherheit
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
▶
▶
▶
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
▶
WARNUNG!
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und vom Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstellen, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen sind.
WARNUNG!
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl verwenden.
DE
Roboter-Interface montieren
1 2
11
Page 12
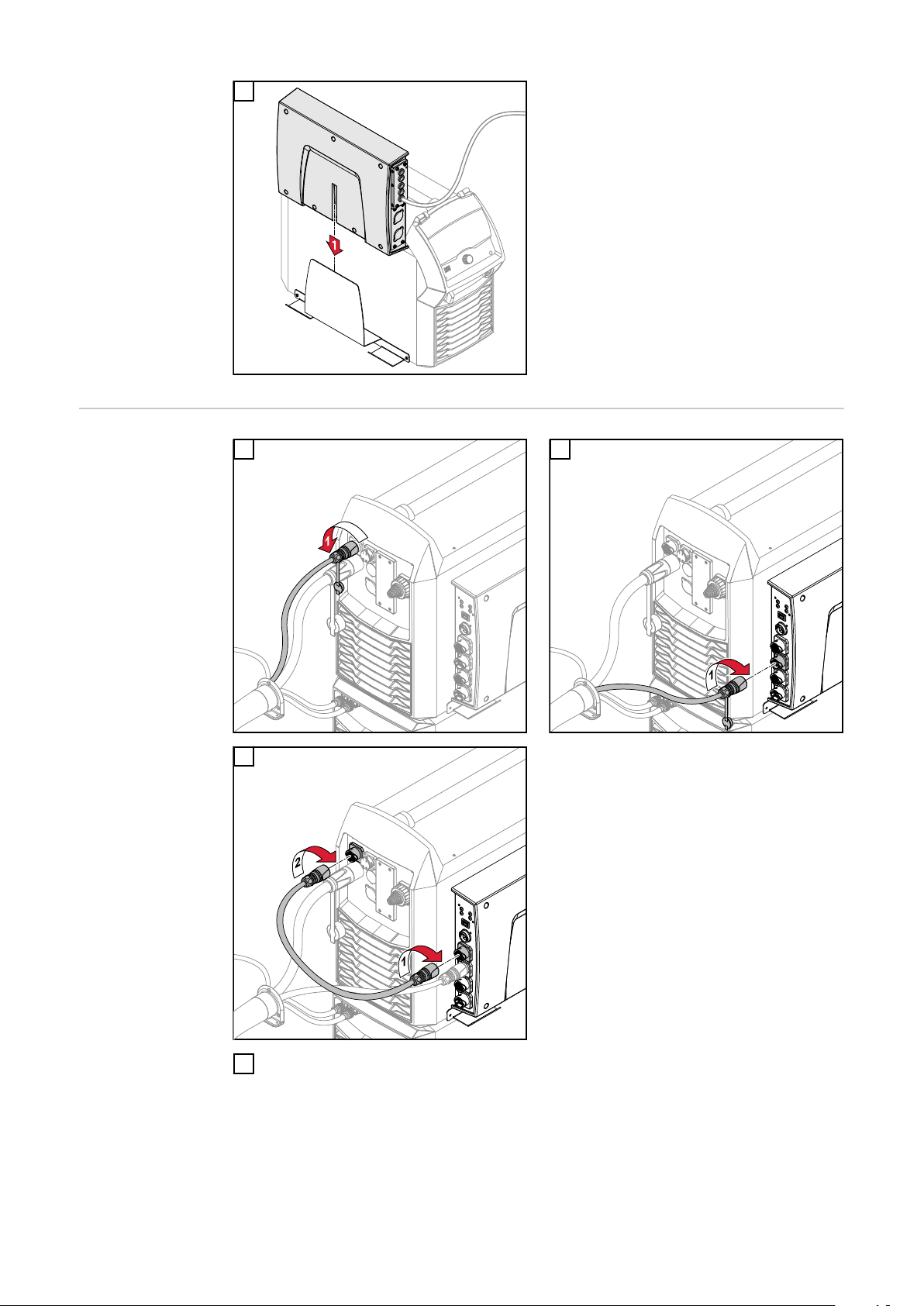
3
Prozesslinie 1 an
das Interface
anschließen
1 2
3
12
Die Systemkomponenten der Prozesslinie 1 mit den mitgelieferten Aufkle-
4
bern markieren
Page 13

Prozesslinie 2 an
das Interface
anschließen
1 2
3
DE
Die Systemkomponenten der Prozesslinie 2 mit den mitgelieferten Aufkle-
4
bern markieren
13
Page 14

DIP-Schalter
Allgemeines Abhängig vom verwendeten Busmodul,
kann der DIP-Schalter im Innenraum
des Roboter-Interfaces zum Einstellen
der Knotenadresse / IP-Adresse verwendet werden.
Beispiel: Knotenadresse / IPAdresse einstellen
DIP-Schalter
8 7 6 5 4 3 2 1 Knotenadresse
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
Die Knotenadresse IP-Adresse wird mit den Positionen 1 bis 6 des DIP-Schalters
eingestellt.
Die Einstellung erfolgt im Binärformat. Das ergibt einen Einstellbereich von 1 bis
63 im Dezimalformat
14
Page 15

Hinweise zur Spannungsversorgung des Roboter-
(1)
(2)
(3)
Interfaces
Hinweise zur
Spannungsversorgung des Interfaces
Werksseitig wird das Interface über den Stecker X19 (1) mit +24 V DC ver-
-
sorgt
Verfügt das Interface über Anschlüsse zur externen Spannungsversorgung,
-
sind diese Anschlüsse mit dem Stecker X20 (2) oder X27 (3) verbunden,
worüber das Interface mit +24 V DC versorgt wird
Das Interface kann parallel über die Stecker X19, X20 und X27 mit Span-
-
nung versorgt werden. Ist dies der Fall, funktioniert das Interface weiter,
auch wenn eine Spannungsversorgung getrennt wird
Soll das Interface über eine externe Spannungsversorgung ein-/ und ausge-
-
schaltet werden, muss die Verbindung des Interfaces zum Stecker X19 getrennt werden
DE
15
Page 16

Fehlerdiagnose
(1)
(2) (3)
(4)
(5)
(6)
(7)
(10)
(8)
(9)
X3 X5X6 X7 X8
(16)
(15)
(14)
(13)
(12)
(11)
Sicherheit
LEDs am Print
des Roboter-Interfaces
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und vom Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes si-
▶
cherstellen, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen sind.
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl ver-
▶
wenden.
16
Page 17

LEDs zur Diagnose der Netzwerkverbindung:
(1) LED LINK
leuchtet orange:
Übertragungsgeschwindigkeit 100 MegaBit
aus:
Übertragungsgeschwindigkeit 10 MegaBit
(2) LED LINK
leuchtet orange:
Übertragungsgeschwindigkeit 100 MegaBit
aus:
Übertragungsgeschwindigkeit 10 MegaBit
(3) LED LINK
leuchtet orange:
Übertragungsgeschwindigkeit 100 MegaBit
aus:
Übertragungsgeschwindigkeit 10 MegaBit
(4) LED LINK
leuchtet orange:
Übertragungsgeschwindigkeit 100 MegaBit
DE
aus:
Übertragungsgeschwindigkeit 10 MegaBit
(5) LED ACTIVITY
leuchtet orange:
ein Kabel ist am Stecker X7 angesteckt
leuchtet/blinkt grün:
Datenübertragung aktiv
(6) LED ACTIVITY
leuchtet orange:
ein Kabel ist am Stecker X8 angesteckt
leuchtet/blinkt grün:
Datenübertragung aktiv
(7) LED ACTIVITY
leuchtet orange:
ein Kabel ist am Stecker X3 angesteckt
leuchtet/blinkt grün:
Datenübertragung aktiv
(8) LED ACTIVITY
leuchtet orange:
ein Kabel ist am Stecker X5 angesteckt
17
Page 18

leuchtet/blinkt grün:
Datenübertragung aktiv
(9) LED ACTIVITY
leuchtet/blinkt grün:
Datenübertragung aktiv
(10) LED SPEED
leuchtet grün:
ein Kabel ist am Stecker X6 angesteckt
(11) LED LINK
nicht belegt
(12) LED LINK
nicht belegt
(13) LED LINK
nicht belegt
(14) LED USER3
leuchtet/blinkt grün:
zur Fehleranalyse
(15) LED USER4
blinkt grün:
das Betriebssystem des Print läuft ordnungsgemäß
LEDs zur Diagnose der Spannungsversorgung:
(16) LED +5V
leuchtet grün:
5 V Betriebsspannung vorhanden
aus:
keine Betriebsspannung vorhanden
18
Page 19

DE
19
Page 20

 Loading...
Loading...