


Operating
Instructions
RI FB PRO/i
Operating Instructions
EN
42,0426,0217,EN 012-13022023


Contents
General 4
Safety 4
Device concept 4
Scope of supply 5
Environmental conditions 5
Technical data 5
Connection sockets and indicators on the robot interface 6
General 6
Connections for the power source and system components 6
Connection sockets for the robot control 7
Indicators on the interface 8
Installation variant 1: installing the bus module, installing the robot interface 9
Safety 9
Inserting the bus module in the robot interface and connecting it to the robot control 9
Fitting the robot interface and connecting it to the power source 10
Installation variant 2: installing the robot interface with integrated bus module 11
Safety 11
Installing the robot interface 11
DIP switch 13
General remarks 13
Example: setting the node address/IP address 13
Notes on the robot interface power supply 14
Notes on the interface power supply 14
Fault diagnosis 15
Safety 15
LEDs on the robot interface PC board 15
EN
3

General
(1) (2) (5)(3)
Robot
Control
(4)
(6)
(7) (8)
(9) (10)
Safety
WARNING!
Danger from incorrect operation and work that is not carried out properly.
This can result in serious personal injury and damage to property.
All the work and functions described in this document must only be carried
▶
out by technically trained and qualified personnel.
Read and understand this document in full.
▶
Read and understand all safety rules and user documentation for this device
▶
and all system components.
WARNING!
Danger from electric current.
This can result in serious personal injury and damage to property.
Before starting work, switch off all the devices and components involved and
▶
disconnect them from the grid.
Secure all the devices and components involved to prevent unintentional re-
▶
starting.
WARNING!
Danger from unplanned signal transmission.
This can result in serious personal injury and damage to property.
Do not transfer safety signals via the interface.
▶
Device concept The RI FB PRO/i robot interface serves as the interface between the power
source and standardised bus modules for a wide range of communication protocols (e.g. Profibus, ProfiNet IO, DeviceNet, CANopen, etc.).
The robot interface can either be fitted to the power source at the factory by
Fronius or at a later time by suitably trained technicians.
(1) Robot control (6) SpeedNet connection cable
(2) Robot control data cable (7) SpeedNet cable from inter-
connecting hosepack
4

(3) Power source (8) Interconnecting hosepack
Scope of supply
(4) RI FB PRO/i robot interface (9) Wirefeeder
(5) Cooling unit (10) Robot
EN
Environmental
conditions
Technical data
CAUTION!
Danger due to unacceptable environmental conditions.
This can result in severe damage to the device.
The device must only be stored and operated in the following environmental
▶
conditions.
Ambient air temperature range:
During operation: -10 °C to +40 °C (14 °F to 104 °F)
-
During transport and storage: -20 °C to +55 °C (-4 °F to 131 °F)
-
Relative humidity:
Up to 50% at 40 °C (104 °F)
-
Up to 90% at 20 °C (68 °F)
-
Keep ambient air free from dust, acids, corrosive gases and substances, etc.
Can be used at altitudes of up to 2000 m (6500 ft).
Power supply internal (24 V)
Protection class IP 20
5

Connection sockets and indicators on the robot
(1)
(2)
interface
General As a result of customer-specific requirements, you may find that your device has
certain connection sockets that are not described in these Operating Instructions, or vice versa.
However, this does not affect the basic functions of the device.
Connections for
the power source
and system components
(1) SpeedNet connection
For connecting the SpeedNet
connection cable - to connect
the power source to the robot
interface
(2) SpeedNet connection
For connecting the SpeedNet
cable from the interconnecting
hosepack - to connect to other
system components, e.g. the
wirefeeder
6

Connection
(1)
(2)
sockets for the
robot control
The robot interface is supplied with one of the following connection configurations depending on the requirement.
Basic configuration example:
(1) Strain-relief device
The robot control cable harness
must be guided through the
strain-relief device inside the
robot interface and connected
directly to the bus module.
ProfiNet IO, Ethernet/IP 2P, etc. configuration example:
EN
(2) Connection sockets for the rel-
evant bus module
The connections for the bus
module are routed to the outside of the robot interface at
the factory. The robot control
cable harness can be connected
directly to the outside of the robot interface.
7

Indicators on the
(4)
(2)
(3)
(1)
interface
(1) Heartbeat LED
Heartbeat status LED Heartbeat meaning LED
Off Offline; no supply voltage
Flashing green The PC board operating system is
working properly
(2) No function -
(3) + (4) see description of the re-
spective bus module
-
8

Installation variant 1: installing the bus module,
installing the robot interface
Safety
Danger from electric current.
This can result in serious injury or death.
▶
▶
▶
Electrical current hazard caused by an inadequate ground conductor connection.
This can result in serious injury and damage to property.
▶
WARNING!
Before starting work, switch off all the devices and components involved and
disconnect them from the grid.
Secure all the devices and components involved to prevent unintentional restarting.
After opening the device, use a suitable measuring instrument to check that
electrically charged components (such as capacitors) have been discharged.
WARNING!
Always use the original housing screws in the original quantity.
EN
Inserting the bus
module in the robot interface and
connecting it to
the robot control
1 2
3 4
9

Fitting the robot
interface and
connecting it to
the power source
1 2
3 4
5 6
10

Installation variant 2: installing the robot interface with integrated bus module
Safety
Danger from electric current.
This can result in serious injury or death.
▶
▶
▶
Electrical current hazard caused by an inadequate ground conductor connection.
This can result in serious injury and damage to property.
▶
WARNING!
Before starting work, switch off all the devices and components involved and
disconnect them from the grid.
Secure all the devices and components involved to prevent unintentional restarting.
After opening the device, use a suitable measuring instrument to check that
electrically charged components (such as capacitors) have been discharged.
WARNING!
Always use the original housing screws in the original quantity.
EN
Installing the robot interface
1 2
3 4
11

5 6
7
12

DIP switch
General remarks Depending on the bus module being
used, the DIP switch inside the robot
interface can be used to set the node
address/IP address.
EN
Example: setting
the node address/IP address
DIP switch
8 7 6 5 4 3 2 1 Node address
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
The node address/IP address is set using DIP switch positions 1 to 6.
The setting is in binary format. This provides a setting range from 1 to 63 in
decimal format.
13
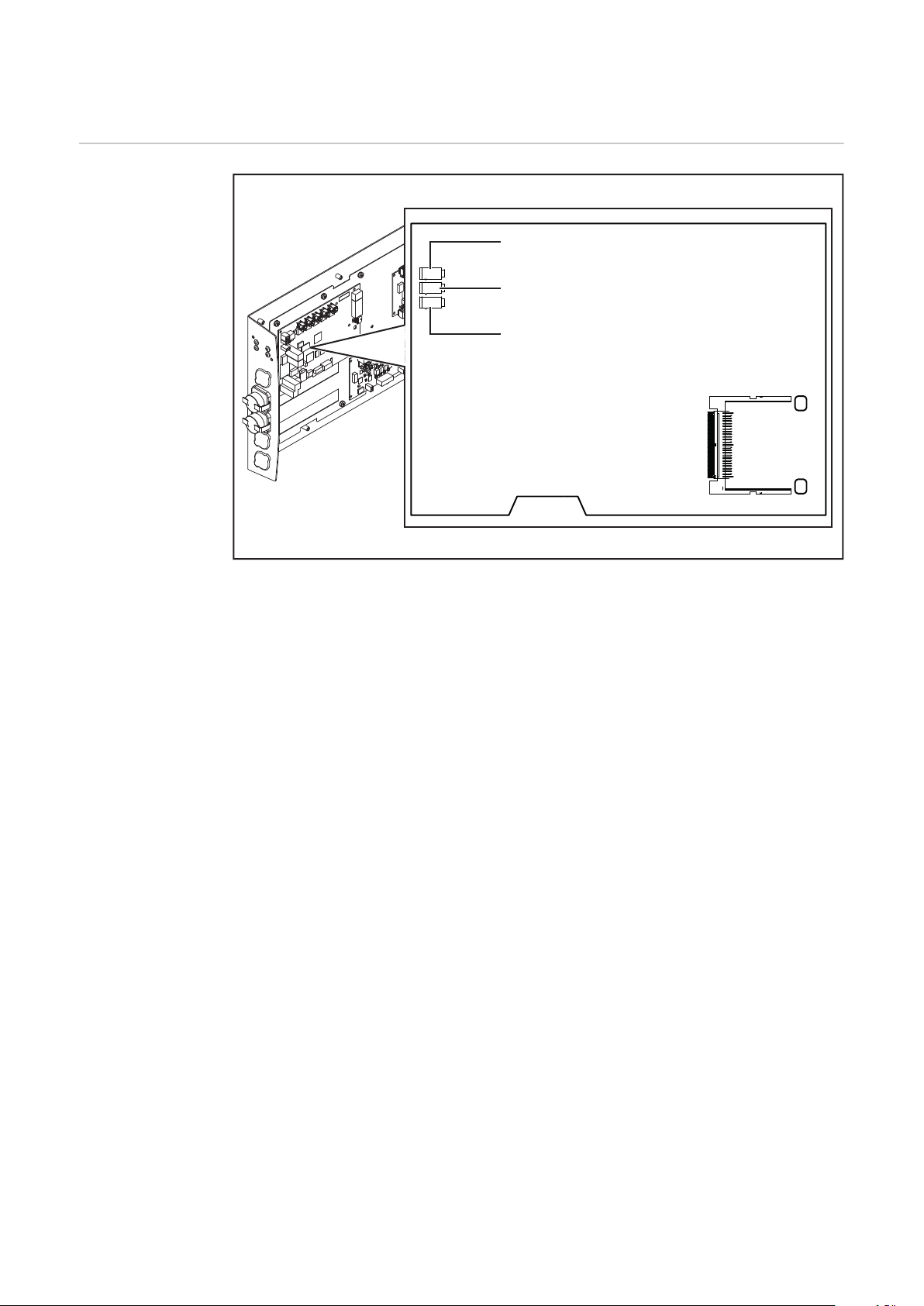
Notes on the robot interface power supply
X19
X20
X27
(1)
(2)
(3)
Notes on the interface power
supply
By default the interface is supplied with +24 V DC via connector X19 (1)
-
If the interface has connection sockets for an external power supply, these
-
sockets must be connected to connector X20 (2) or X27 (3), through which
the interface is supplied with +24 V DC
The interface can be supplied with power though connectors X19, X20 and
-
X27 in parallel. If this is the case, the interface will continue to function even
if one of the power supply lines is disconnected
If the interface is to be switched on and off via an external power supply, the
-
connection between the interface and connector X19 must be broken
14
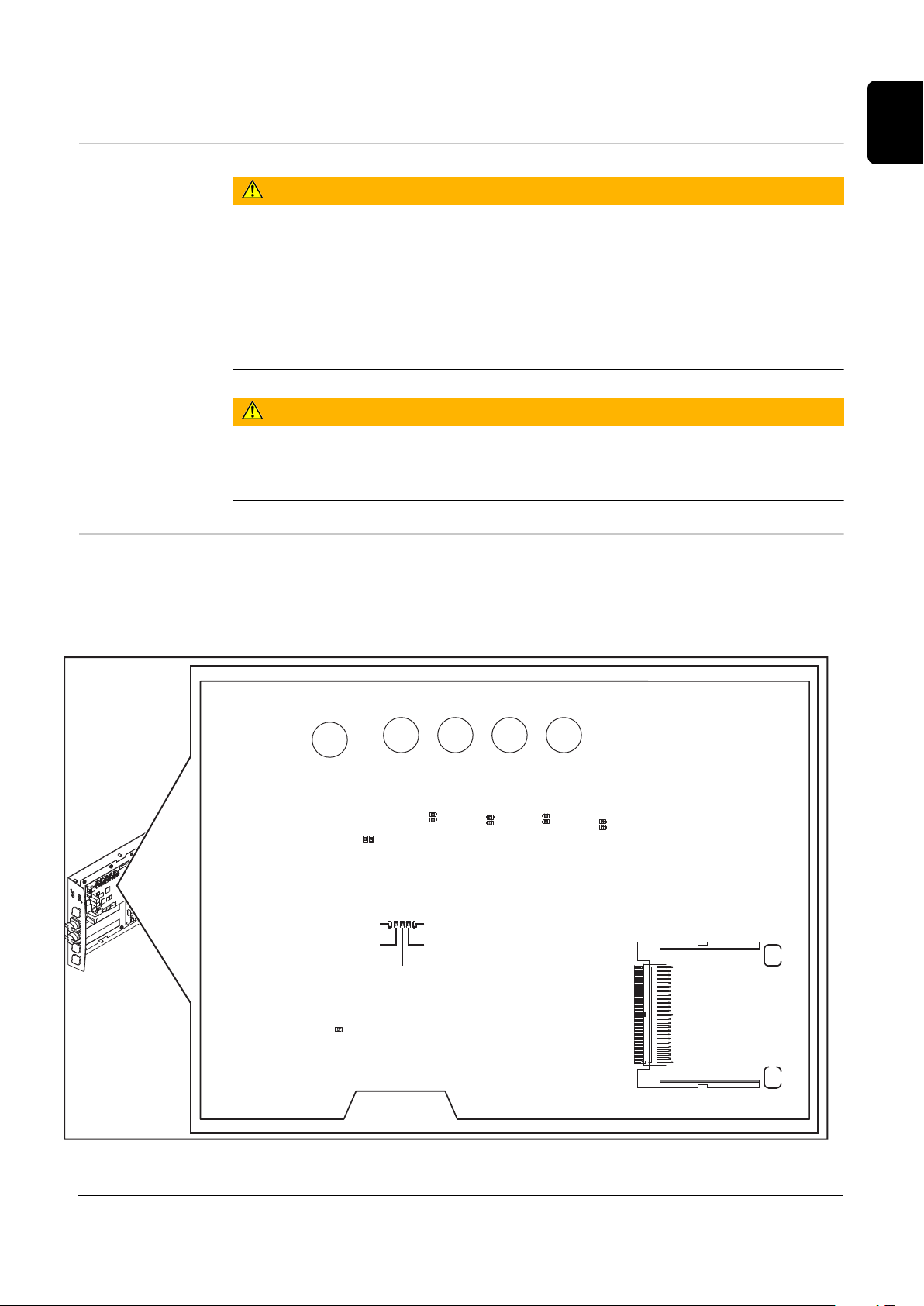
Fault diagnosis
(8)
(4)
(7)
(3)
(6)
(2)
(5)
(1)
)9( )01(
(16)
(13)
(12)
(11)
(14)
(15)
(X6)
(X7) (X8) (X3) (X5)
EN
Safety
LEDs on the robot interface PC
board
WARNING!
Danger from electric current.
This can result in serious injuries and death.
Before starting work, switch off all the devices and components involved and
▶
disconnect them from the grid.
Secure all the devices and components involved to prevent unintentional re-
▶
starting.
After opening the device, use a suitable measuring instrument to check that
▶
electrically charged components (such as capacitors) have been discharged.
WARNING!
Danger from electrical current due to inadequate ground conductor connection.
This can result in serious injury and damage to property.
Always use the original housing screws in the original quantity.
▶
LEDs for network connection diagnosis:
15

LED Display Meaning
(1) LED LINK Lights up orange Transmission speed 100 Mbps
Off Transmission speed 10 Mbps
(2) LED LINK Lights up orange Transmission speed 100 Mbps
Off Transmission speed 10 Mbps
(3) LED LINK Lights up orange Transmission speed 100 Mbps
Off Transmission speed 10 Mbps
(4) LED LINK Lights up orange Transmission speed 100 Mbps
Off Transmission speed 10 Mbps
(5) LED ACTIVITY Lights up orange A cable is connected to the X7 connector
Lights up/flashes
green
(6) LED ACTIVITY Lights up orange A cable is connected to the X8 connector
Lights up/flashes
green
(7) LED ACTIVITY Lights up orange A cable is connected to the X3 connector
Lights up/flashes
green
(8) LED ACTIVITY Lights up orange A cable is connected to the X5 connector
Lights up/flashes
green
(9) LED ACTIVITY Lights up/flashes
green
(10) LED SPEED Lights up green A cable is connected to the X6 connector
(11) LED LINK Not assigned -
(12) LED LINK Not assigned -
(13) LED LINK Not assigned -
(14) LED USER3 Lights up/flashes
green
Data transfer active
Data transfer active
Data transfer active
Data transfer active
Data transfer active
For fault analysis
(15) LED USER4 Flashing green The PC board operating system is working prop-
erly
LEDs for power supply diagnosis:
LED Display Meaning
(16) LED +5V Lights up green 5V operating voltage available
Off No working voltage available
16

EN
17

18

EN
19

 Loading...
Loading...