


Operating
Instructions
RI FB PRO/i
JA
操作手順
42,0426,0217,JA 012-08022023


目次
一般事項 4
安全記号 4
装置のコンセプト 4
供給範囲 5
環境状況 5
技術データ 5
ロボットインターフェース上の接続ソケットとインジケータ 6
一般事項 6
溶接電源とシステム構成品のための接続ソケット 6
ロボット制御のための接続ソケット 7
インターフェース上のインジケータ 8
設置バリエーション 1:バスモジュールの設置、ロボットインターフェースの設置 9
安全記号 9
ロボットインターフェースへのバスモジュールの 挿入、そしてそれのロボット制御への接続 9
ロボットインターフェースの取り付け、そしてそれの溶接電源への接続 10
設置バリエーション 2:統合バスモジュールによるロボットインターフェースの 設置 11
安全記号 11
ロボットインターフェースの設置 11
ディップ・スイッチ 13
一般的な注意事項 13
例:ノードアドレス/IP アドレスの設定 13
ロボットインターフェースの電源に関する注意 14
インターフェースの電源に関する注意 14
故障診断 15
安全 15
ロボットインターフェース PCB 上の LED 15
JA
3

一般事項
(1) (2) (5)(3)
Robot
Control
(4)
(6)
(7) (8)
(9) (10)
安全記号
警告!
誤操作、不適切な作業を行うと危険です。
人身傷害または製品に深刻なダメージが発生する可能性があります。
本書に記載されているすべての操作と機能は、技術トレーニングを受けた有資格者
▶
のみが実行してください。
この文書をすべて読み、理解してください。
▶
この装置とすべてのシステム部品のすべての安全規則とユーザー文書を読み、理解
▶
してください。
警告!
感電の危険があります。
人身傷害または製品に深刻な損傷が発生する可能性があります。
作業を始める前に、関係するすべてのデバイスとコンポーネントの電源を切り、そ
▶
れらをグリッドから切り離してください。
関係するすべてのデバイスとコンポーネントのスイッチが再度オンにならないよう
▶
に固定してください。
警告!
計画外の信号伝送が行われると危険です。
人身傷害または製品に深刻なダメージが発生する可能性があります。
インターフェース経由で安全信号を伝送しないでください。
▶
装置のコンセプト RI FB PRO/i ロボットインターフェースは、溶接電源やさまざまな通信プロトコル(例:
Probus、ProNet IO、DeviceNet、CANopen)に対応した標準バスモジュール間のイ
ンターフェースとして機能します。
ロボットインターフェースは、出荷時に製造メーカーによる取り付け、または適切なト
レーニングを受けた有資格者による後付けが可能です。
(1) ロボット制御 (6) SpeedNet 接続ケーブル
(2) ロボット制御のデータケーブル (7) 連結ホースパックからの
SpeedNet ケーブル
4

(3) 溶接電源 (8) 連結ホースパック
供給範囲
(4) RI FB PRO/i ロボットインターフ
ェース
(5) 冷却ユニット (10) ロボット
(9) ワイヤ送給装置
JA
環境状況
技術データ
注意!
禁止の環境条件によりリスクが発生します。
これは機器に重大な損傷を与える可能性があります。
次の環境状況下でのみ装置を保管および操作してください。
▶
周囲空気の温度範囲:
-
作動中:-10 °C~+40 °C(14 °F~104 °F)
-
輸送時および保管時:-20 °C~+55 °C(-4 °F~131 °F)
相対湿度:
-
最大 50%、40°C(104°F)
-
最大 90%、20 °C(68 °F)
周囲空気:埃、酸、腐食性ガスや物質などがない。
海抜高度:最高 2000 メートル(6500 フィート)まで。
電源 内部(24 V)
保護クラス IP 20
5

ロボットインターフェース上の接続ソケットとインジ
(1)
(2)
ケータ
一般事項 各ユーザのニーズに応じた装置により、操作説明書に記載がない接続ソケットがデバイ
スにあったり、なかったりする可能性があります。
しかし、これはデバイスの基本的機能に影響を及ぼしません。
溶接電源とシステ
ム構成品のための
接続ソケット
(1) SpeedNet 接続
SpeedNet 接続ケーブルを接続 溶接電源をロボットインターフェ
ースに接続します。
(2) SpeedNet 接続
連結ホースパックから SpeedNet
ケーブルを接続 - ワイヤ送給装置
など、他のシステム部品に接続しま
す。
6
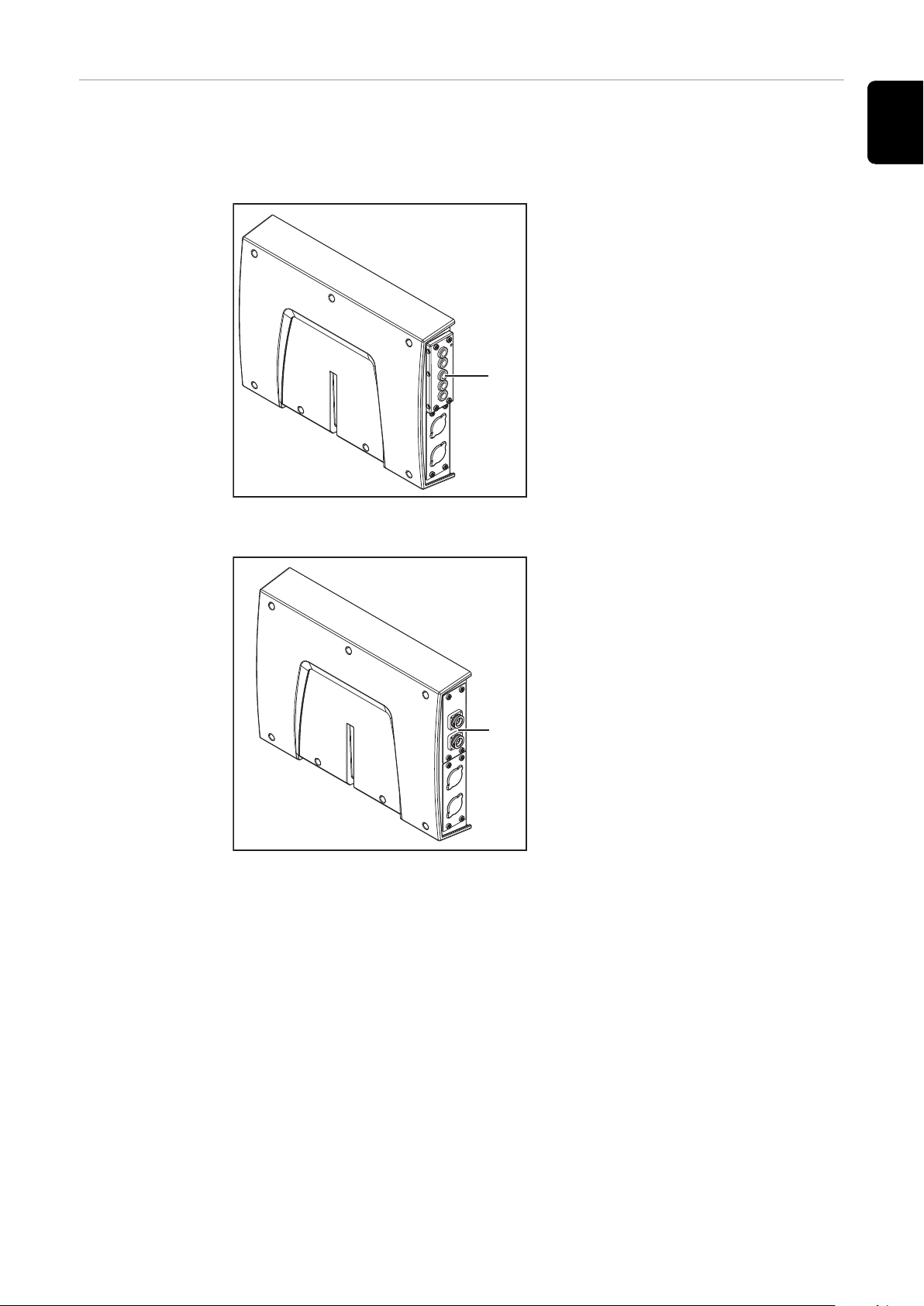
ロボット制御のた
(1)
(2)
めの接続ソケット
ロボットインターフェースは、ニーズに応じて、次の接続設定のいずれかで提供されま
す。
基本的な設定例:
(1) 歪開放装置
ロボット制御ケーブルハーネスは、
ロボットインターフェースの歪開
放装置を通して配線し、バスモジュ
ールに直接接続する必要がありま
す。
ProNet IO、Ethernet/IP 2P などの設定例:
JA
(2)
関連バスモジュールの接続ソケッ
ト
バスモジュールの接続ソケットは、
工場出荷時に、ロボットインターフ
ェースの外に配線されます。ロボ
ット制御ケーブルハーネスはロボ
ットインターフェースの外へ直接
接続できます。
7

インターフェース
(4)
(2)
(3)
(1)
上のインジケータ
(1) ハートビート LED
ハートビート LED のステー
タス
オフ オフライン、電圧供給なし
緑色に点滅 PC ボードのオペレーティングシステムが
(2) 機能しない -
(3) + (4) 各バスモジュールの説明を
参照
ハートビート LED の意味
きちんと機能しています
-
8
設置バリエーション 1:バスモジュールの設置、ロボット
インターフェースの設置
JA
安全記号
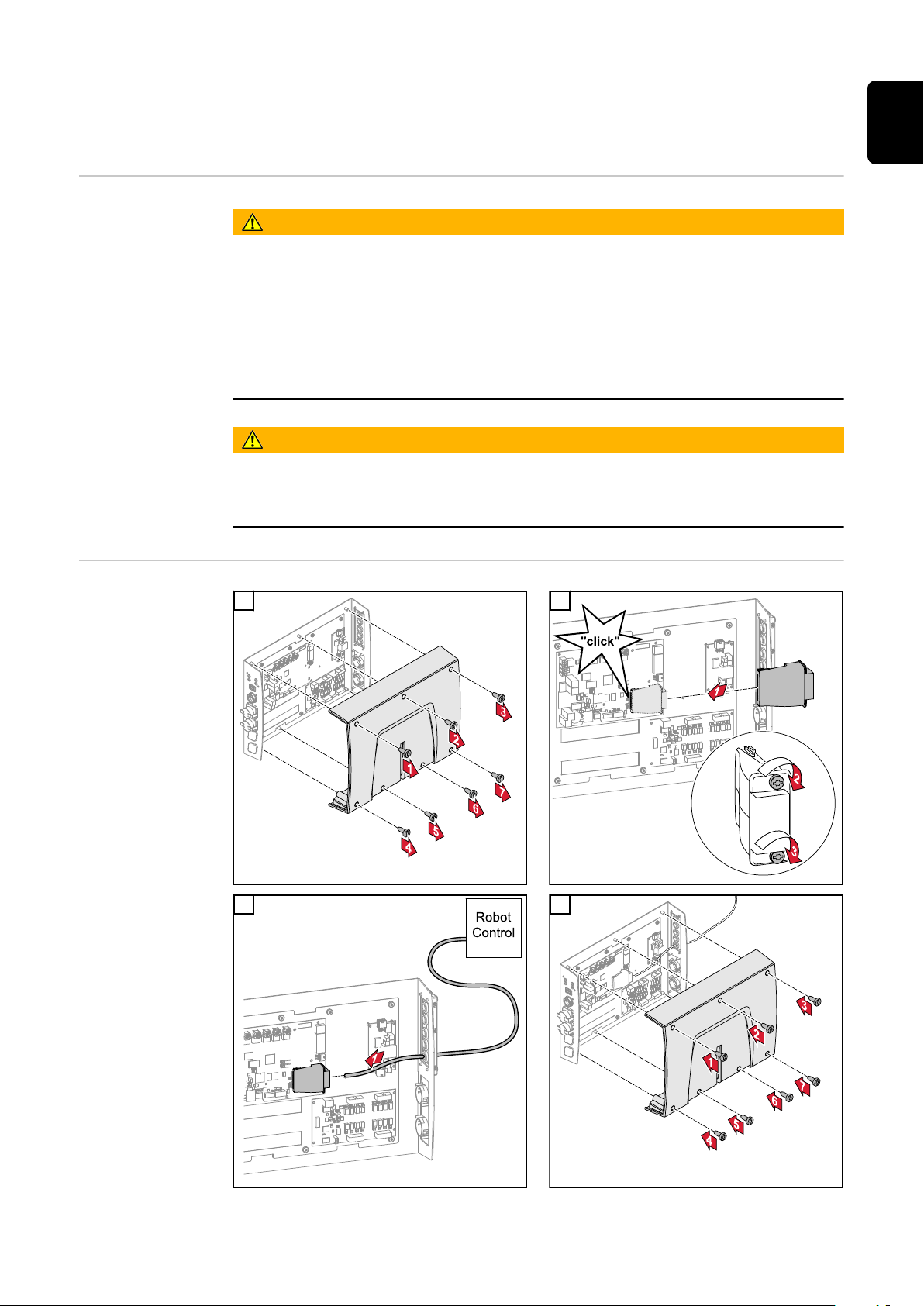
ロボットインター
フェースへのバス
モジュールの挿入、
そしてそれのロボ
ット制御への接続
警告!
感電する危険があります。
これは重傷または死亡につながる可能性があります。
作業を始める前に、関係するすべての装置とコンポーネントの電源を切り、それら
▶
をグリッドから切り離してください。
意図せず再起動しないために、関連するすべての装置とコンポーネントを固定して
▶
ください。
装置を開いたら、適切な計測装置を使用して電荷を帯びた部品(コンデンサーなど)
▶
が放電されていることを確認します。
警告!
接地線の不適切接続によって生じる電流障害。
重傷を負ったり、物的損害を負う可能性があります。
純正の指定個数のハウジングねじを使用してください。
▶
1 2
3 4
9

ロボットインター
フェースの取り付
け、そしてそれの溶
接電源への接続
1 2
3 4
5 6
10

設置バリエーション 2:統合バスモジュールによるロボ
ットインターフェースの設置
JA
安全記号
ロボットインター
フェースの設置
警告!
感電する危険があります。
これは重傷または死亡につながる可能性があります。
作業を始める前に、関係するすべての装置とコンポーネントの電源を切り、それら
▶
をグリッドから切り離してください。
意図せず再起動しないために、関連するすべての装置とコンポーネントを固定して
▶
ください。
装置を開いたら、適切な計測装置を使用して電荷を帯びた部品(コンデンサーなど)
▶
が放電されていることを確認します。
警告!
接地線の不適切接続によって生じる電流障害。
重傷を負ったり、物的損害を負う可能性があります。
純正の指定個数のハウジングねじを使用してください。
▶
1 2
3 4
11

5 6
7
12

ディップ・スイッチ
一般的な注意事項 使用のバスモジュールに応じて、ロボット
インターフェース内のディップ・スイッチ
を使用し、ノードアドレス/IP アドレスを
設定できます。
JA
例:ノードアドレ
ス/IP アドレスの
設定
ディップスイッチ
8 7 6 5 4 3 2 1 ノードアドレス
- - OFF OFF OFF OFF OFF オン 1
- - OFF OFF OFF OFF オン OFF 2
- - OFF OFF OFF OFF オン オン 3
- - オン オン オン オン オン OFF 62
- - オン オン オン オン オン オン 63
ノードアドレス/IP アドレスは、ディップスイッチの位置 1~6 を使用して設定されます。
設定はバイナリ形式です。これは、10 進数表記の 1~63 の設定範囲になります。
13

ロボットインターフェースの電源に関する注意
X19
X20
X27
(1)
(2)
(3)
インターフェース
の電源に関する注
意
-
デフォルトでは、インターフェースは、コネクター X19 (1)を介して+24 V DC で供給
されます。
-
インターフェースに外部電源用の接続ソケットがある場合、これらのソケットはコ
ネクター X20 (2)または X27 (3)に接続する必要があります。これを通じて、インター
フェースには+24 V DC の電力が供給されます。
-
インターフェースには、並列接続されたコネクター X19、X20、X27 を通じ電力を供
給できます。この場合、電源ラインの 1 つが切断されても、インターフェースは機
能し続けます。
-
インターフェースを外部電源によりオン/オフにする場合、インターフェースとコネ
クター X19 の間の接続は解除する必要があります。
14

故障診断
(8)
(4)
(7)
(3)
(6)
(2)
(5)
(1)
)9( )01(
(16)
(13)
(12)
(11)
(14)
(15)
(X6)
(X7) (X8) (X3) (X5)
JA
安全
ロボットインター
フェース PCB 上の
LED
警告!
感電の危険があります。
これは重傷および死亡につながる可能性があります。
作業を始める前に、関係するすべての装置とコンポーネントの電源を切り、それら
▶
をグリッドから切り離してください。
関係するすべての装置とコンポーネントのスイッチが再度オンにならないように固
▶
定してください。
装置を開いたら、適切な計測装置を使用して電荷を帯びた部品(コンデンサーなど)
▶
が放電されていることを確認します。
警告!
接地線の接続が不十分だと、感電する危険があります。
重大な怪我や物的損害につながる可能性があります。
ハウジングのネジは、接地導体接続が保証されない他のネジで置き換えないでくだ
▶
さい。
ネットワーク接続診断の LED:
15
LED ディスプレイ 意味
(1) LED リンク オレンジに点灯 伝送速度 100Mbps
オフ 伝送速度 10Mbps
(2) LED リンク オレンジに点灯 伝送速度 100Mbps
オフ 伝送速度 10Mbps
(3) LED リンク オレンジに点灯 伝送速度 100Mbps
オフ 伝送速度 10Mbps
(4) LED リンク オレンジに点灯 伝送速度 100Mbps
オフ 伝送速度 10Mbps
(5) LED アクティビティオレンジに点灯
緑色に点灯/点滅 データ転送中
(6) LED アクティビティオレンジに点灯
緑色に点灯/点滅 データ転送中
(7) LED アクティビティオレンジに点灯
緑色に点灯/点滅 データ転送中
(8) LED アクティビティオレンジに点灯
緑色に点灯/点滅 データ転送中
(9) LED アクティビティ緑色に点灯/点滅
(10) LED 速度 緑色に点灯 ケーブルが X6 コネクターに接続されています
(11) LED リンク 割り当てない -
(12) LED リンク 割り当てない -
(13) LED リンク 割り当てない -
ケーブルが X7 コネクターに接続されています
ケーブルが X8 コネクターに接続されています
ケーブルが X3 コネクターに接続されています
ケーブルが X5 コネクターに接続されています
データ転送中
(14) LED ユーザー 3 緑色に点灯/点滅 障害分析用
(15) LED ユーザー 4 緑色に点滅 PC ボードのオペレーティングシステムが正常に機能
しています
電源診断の LED:
LED ディスプレイ 意味
(16) +5V LED 緑色に点灯 5V の作動電圧あり
オフ 作動電圧なし
16

JA
17

18

JA
19

 Loading...
Loading...