

Page 1

Operating
Instructions
RI FB PRO/i
RI MOD/i CC Ethernet/IP-2P
DE
EN-US
Bedienungsanleitung
Operating instructions
42,0410,2198 017-08022023
Page 2

Page 3
Inhaltsverzeichnis
Allgemeines 4
Sicherheit 4
Anschlüsse und Anzeigen 4
Eigenschaften der Datenübertragung 5
Konfigurationsparameter 5
IP-Adresse des Busmoduls einstellen 7
IP-Adresse des Busmoduls einstellen 7
Ein- und Ausgangssignale 9
Datentypen 9
Verfügbarkeit der Eingangssignale 9
Eingangssignale (vom Roboter zur Stromquelle) 9
Wertebereich Working mode 14
Wertebereich Documentation mode 14
Wertebereich Process controlled correction 15
Wertebereich Processline selection 15
Wertebereich TWIN mode 15
Verfügbarkeit der Ausgangssignale 16
Ausgangssignale (von der Stromquelle zum Roboter) 16
Zuordnung Sensorstatus 1-4 19
Wertebereich Safety status 19
Wertebereich Process Bit 20
DE
3
Page 4

Allgemeines
1234567
8
Sicherheit
Anschlüsse und
Anzeigen
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen
▶
nur von technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses
▶
Gerätes und aller Systemkomponenten lesen und verstehen.
1 TX+
2 TX-
3 RX+
6 RX-
4,5,7,8Normalerweise nicht ver-
wendet; um die Signalvollständigkeit sicherzustellen, sind diese Pins miteinander verbunden und enden
über einen Filterkreis am
Schutzleiter (PE).
Pin-Belegung RJ 45 ProfiNet Anschluss
(1) LED MS - Modulstatus
Aus:
keine Versorgungsspannung
Leuchtet grün:
gesteuert durch einen Master
Blinkt grün (einmal):
Master nicht konfiguriert oder im
Ruhezustand
Leuchtet rot:
Hauptfehler (Ausnahmezustand,
schwerer Fehler, ...)
Blinkt rot:
behebbarer Fehler
4
Page 5
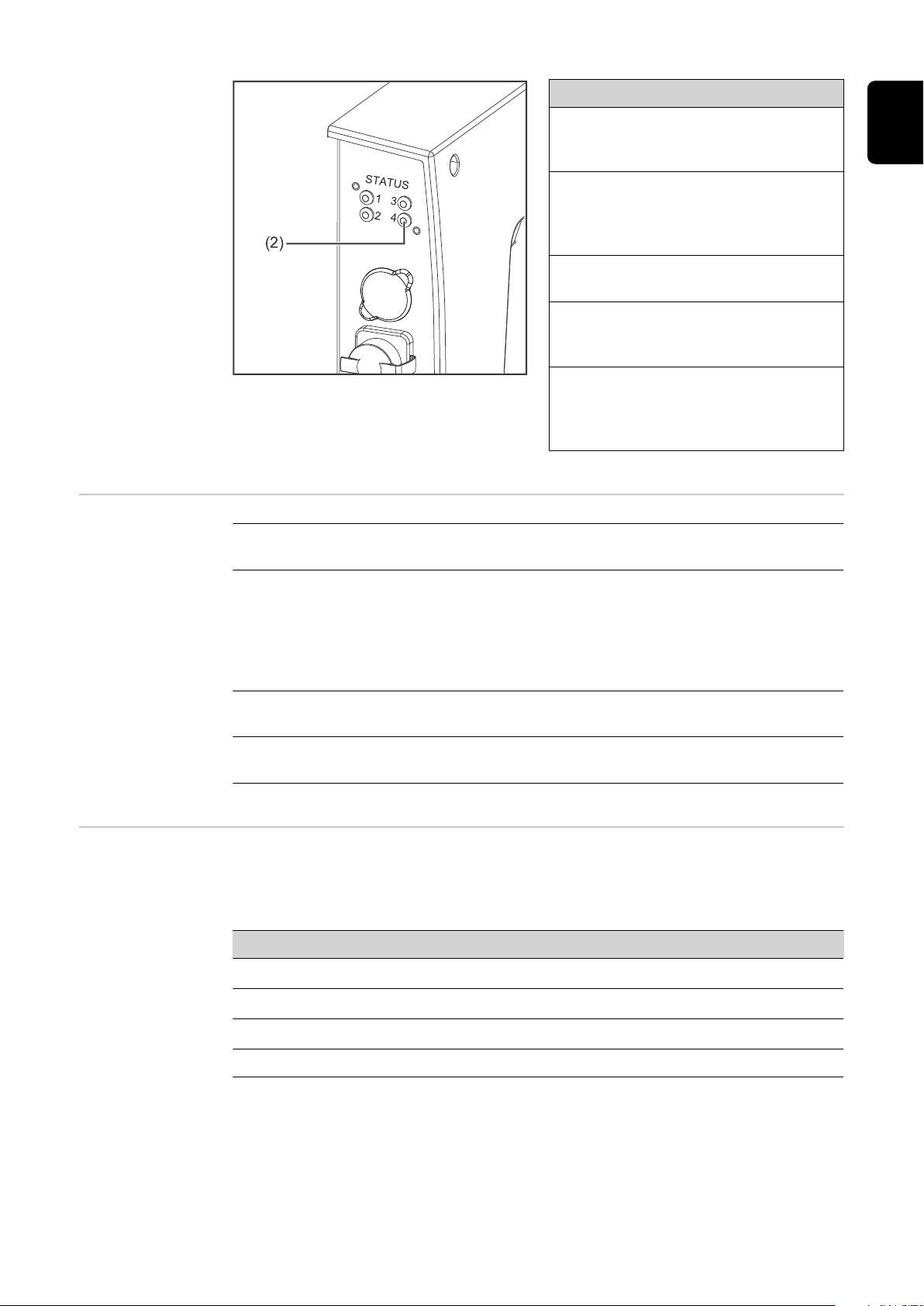
(2) LED NS - Netzwerkstatus
Eigenschaften
der Datenübertragung
Aus:
keine Versorgungsspannung oder
keine IP-Adresse
Leuchtet grün:
Online; eine oder mehrere Verbindungen hergestellt (CIP Kategorie 1
oder 3)
Blinkt grün:
Online; keine Verbindung hergestellt
Leuchtet rot:
doppelte IP-Adresse, schwerer Fehler
Blinkt rot:
Zeitüberlauf bei einer oder mehreren Verbindungen (CIP Kategorie 1
oder 3)
Übertragungstechnik
Ethernet
Medium
Bei der Auswahl der Kabel und Stecker ist die ODVA Empfehlung für die Planung und Installation vonEtherNet/IP Systemen zu beachten.
DE
Konfigurationsparameter
Seitens Hersteller wurden die EMV-Tests mit dem Kabel IE-C5ES8VG0030M40M40-F durchgeführt.
Übertragungs-Geschwindigkeit
10 Mbit/s or 100 Mbit/s
Busanschluss
RJ-45 Ethernet / M12
Bei einigen Robotersteuerungen kann es erforderlich sein die hier beschriebenen
Konfigurationsparameter anzugeben, damit das Busmodul mit dem Roboter
kommunizieren kann.
Parameter Wert Beschreibung
Vendor ID 0534
Device Type 000C
Product Code 0320
hex
hex
hex
(1332
(12
dez
(800
) Fronius International GmbH
dez
) Communication adapter
) Fronius FB Pro Ethernet/IP-2-Port
dez
Product Name Fronius-FB-Pro-EtherNetIP(TM)
5
Page 6

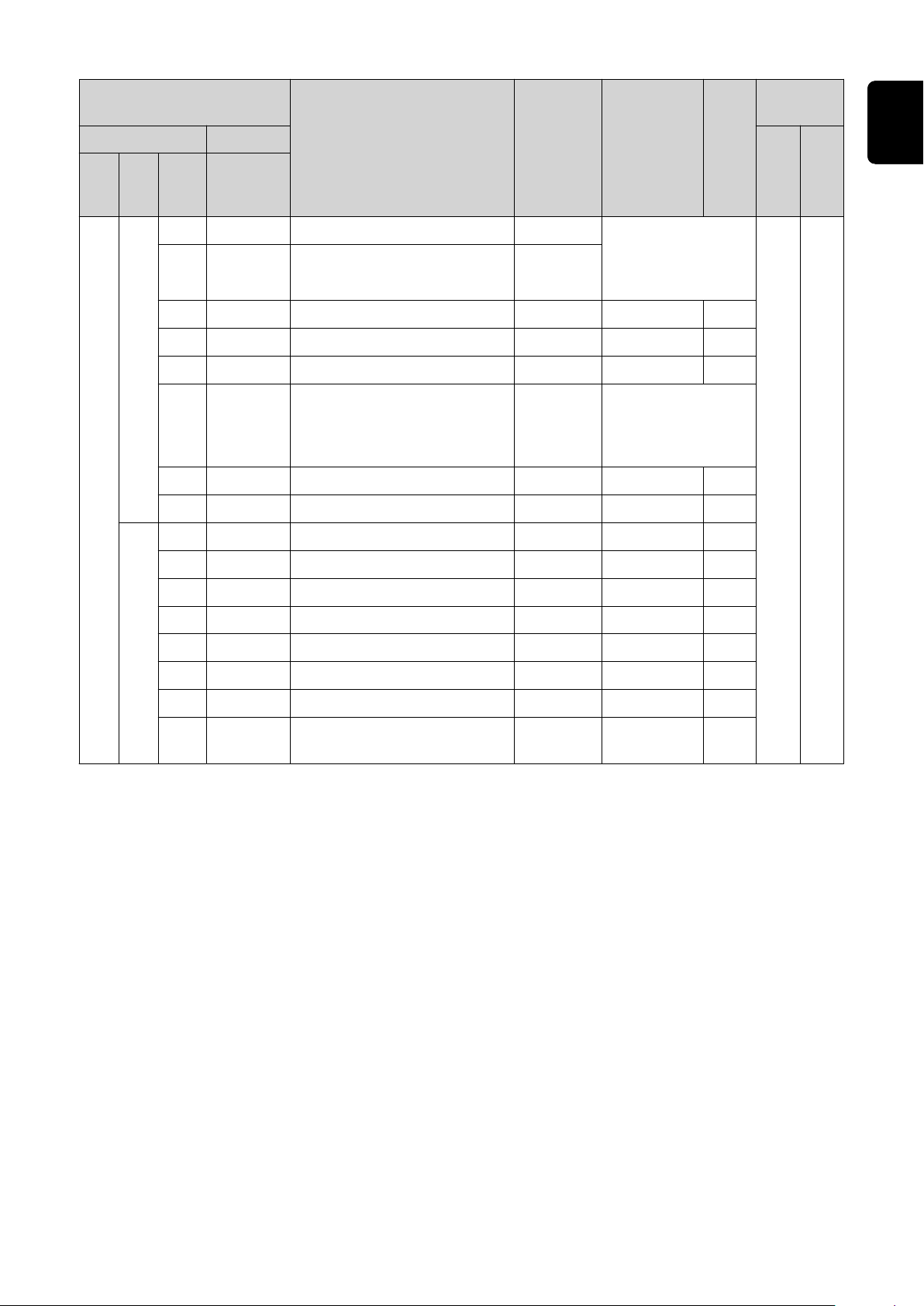
Image Type
Instance
Type
Instance
Name
Instance
Description
Instance
Number
Size
[Byt
e]
Standard
Image
Con-
Economy
Image
Con-
Produ-
cing In-
stance
suming
Instance
Produ-
cing In-
stance
suming
Instance
Input Da-
ta Stan-
dard
Output
Data
Standard
Input Da-
ta Stan-
dard
Output
Data
Standard
Data from power
source to robot
Data from robot
to power source
Data from power
source to robot
Data from robot
to power source
100 40
150 40
101 16
151 16
6
Page 7

IP-Adresse des Busmoduls einstellen
DE
IP-Adresse des
Busmoduls einstellen
Die IP-Adresse des Busmoduls kann
eingestellt werden:
mit dem DIP-Schalter im Interface
1.
im Bereich 192.168.0.xx
(xx = DIP-Schalterstellung = 1 bis
63)
Werksseitig sind alle Positio-
-
nen in Stellung OFF geschaltet. In diesem Fall muss die
IP-Adresse auf der Website
der Stromquelle eingestellt
werden
auf der Website der Stromquelle
2.
(wenn alle Positionen des DIPSchalters in Stellung OFF geschaltet sind)
Die IP-Adresse wird mit den Positionen 1 bis 6 des DIP-Schalters eingestellt. Die
Einstellung erfolgt im Binärformat. Das ergibt einen Einstellbereich von 1 bis 63
im Dezimalformat.
Beispiel für das Einstellen der IP-Adresse des Busmoduls mit dem DIPSchalter im Interface:
DIP-Schalter
8 7 6 5 4 3 2 1 IP-Adresse
- -
- -
- -
- -
- -
OFF OFF OFF OFF OFF ON
OFF OFF OFF OFF ON OFF
OFF OFF OFF OFF ON ON
ON ON ON ON ON OFF
ON ON ON ON ON ON
1
2
3
62
63
Anleitung für das Einstellen der IP-Adresse auf der Website der Stromquelle:
IP-Adresse der verwendeten Stromquelle notieren:
Am Bedienpanel der Stromquelle „Voreinstellungen“ auswählen
1
Am Bedienpanel der Stromquelle „System“ auswählen
2
Am Bedienpanel der Stromquelle „Information“ auswählen
3
Angezeigte IP-Adresse notieren (Beispiel: 10.5.72.13)
4
Website der Stromquelle im Internetbrowser aufrufen:
Computer mit dem Netzwerk der Stromquelle verbinden
5
IP-Adresse der Stromquelle in die Suchleiste des Internetbrowsers eingeben
6
und bestätigen
Standard-Benutzernamen (admin) und Passwort (admin) eingeben
7
Website der Stromquelle wird angezeigt
-
IP-Adresse des Busmoduls einstellen:
Auf der Website der Stromquelle den Reiter „RI FB PRO/i“ auswählen
8
7
Page 8

Bei Punkt „Feldbus Konfiguration“ die gewünschte IP-Adresse für das Inter-
9
face eingeben
Beispielsweise: 192.168.0.12
„Konfiguration setzen“ auswählen
10
„Feldbus-Modul neu starten“ auswählen
11
die eingestellte IP-Adresse wird übernommen
-
8
Page 9
Ein- und Ausgangssignale
Datentypen Folgende Datentypen werden verwendet:
UINT16 (Unsigned Integer)
-
Ganzzahl im Bereich von 0 bis 65535
SINT16 (Signed Integer)
-
Ganzzahl im Bereich von -32768 bis 32767
Umrechnungsbeispiele:
für positiven Wert (SINT16)
-
z.B. gewünschter Drahtvorschub x Faktor
12.3 m/min x 100 = 1230
für negativen Wert (SINT16)
-
z.B. gewünschte Lichtbogen-Korrektur x Faktor
-6.4 x 10 = -64
= FFC0
dez
= 04CE
dez
hex
DE
hex
Verfügbarkeit
der Eingangssignale
Eingangssignale
(vom Roboter
zur Stromquelle)
Die nachfolgend angeführten Eingangssignale sind ab Firmware V1.7.0 des RI FB
PRO/i verfügbar.
9
Page 10

Adresse
relativ absolut
Prozess-
Image
WORD
0
BYTE
BIT
0 0 Welding Start steigend
1 1 Robot ready High
2 2 Working mode Bit 0 High
3 3 Working mode Bit 1 High
0
4 4 Working mode Bit 2 High
5 5 Working mode Bit 3 High
6 6 Working mode Bit 4 High
7 7 —
0 8 Gas on steigend
1 9 Wire forward steigend
2 10 Wire backward steigend
3 11 Error quit steigend
4 12 Touch sensing High
1
5 13 Torch blow out steigend
6 14 Processline selection Bit 0 High Siehe Tabelle
7 15 Processline selection Bit 1 High
BIT
Signal
Aktivität /
Datentyp
Bereich
Siehe Tabelle
Wertebereich
Working mode
Wertebereich
selection auf Sei-
auf Seite 14
Processline
te 15
Faktor
Standard
ü ü
Economy
0 16 Welding Simulation High
1 17 Synchro pulse on High
2 18 —
3 19 —
2
4 20 —
5 21 —
6 22 Wire brake on High
1
7 23 Torchbody Xchange High
ü ü
0 24 —
1 25 Teach mode High
2 26 —
3 27 —
3
4 28 —
5 29 Wire sense start steigend
6 30 Wire sense break steigend
7 31 —
10
Page 11
Adresse
relativ absolut
Prozess-
Image
DE
WORD
2
BYTE
BIT
0 32 TWIN mode Bit 0 High Siehe Tabelle
1 33 TWIN mode Bit 1 High
2 34 —
3 35 —
4
4 36 —
5 37 Documentation mode High
6 38 —
7 39 —
0 40 —
1 41 —
2 42 —
3 43 —
5
4 44 —
BIT
Signal
Aktivität /
Datentyp
Bereich
Wertebereich
TWIN mode auf
Siehe Tabelle
Wertebereich Do-
cumentation mo-
de auf Seite 14
Seite 15
Faktor
Standard
ü ü
Economy
5 45 —
6 46 —
7 47
Disable process controlled
correction
High
11
Page 12

Adresse
relativ absolut
Prozess-
Image
WORD
3
BYTE
BIT
0 48 —
1 49 —
2 50 —
3 51 —
6
4 52 —
5 53 —
6 54 —
7 55 —
0 56
1 57
2 58
3 59
7
4 60
BIT
Signal
ExtInput1 => OPT_Output
1
ExtInput2 => OPT_Output
2
ExtInput3 => OPT_Output
3
ExtInput4 => OPT_Output
4
ExtInput5 => OPT_Output
5
Aktivität /
Datentyp
High
High
High
High
High
Bereich
Faktor
Standard
ü ü
Economy
5 61
6 62
7 63
8 0-7 64-71
4
9 0-7 72-79
10,
5
0-7 80-95
11
ExtInput6 => OPT_Output
6
ExtInput7 => OPT_Output
7
ExtInput8 => OPT_Output
8
Welding characteristic- /
Job number
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG Standard-Manuell,
MIG/MAG PMC,
MIG/MAG LSC,
CMT,
ConstantWire:
Wire feed speed command
value
Beim Job-Betrieb:
Power correction
High
High
High
UINT16 0 bis 1000 1
-327,68 bis
SINT16
SINT16
327,67
[m/min]
-20,00 bis
20,00
[%]
100
100
ü ü
ü ü
12
Page 13

Adresse
relativ absolut
Prozess-
Image
DE
WORD
6
BYTE
12,
0-7 96-111
13
BIT
BIT
Signal
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Arclength correction
Beim Schweißverfahren
MIG/MAG Standard-Manuell:
Welding voltage
Beim Job-Betrieb:
Arclength correction
Beim Schweißverfahren
ConstantWire:
Hotwire current
Aktivität /
Datentyp
SINT16
UINT16
SINT16
UINT16
Bereich
-10,0 bis
10,0
[Schritte]
0,0 bis
6553,5
[V]
-10,0 bis
10,0
[Schritte]
0,0 bis
6553,5
[A]
10
10
10
10
Faktor
Standard
ü ü
Economy
14,
7
8
9
10
0-7 112-127
15
16 0-7 128-135
17 0-7 136-143
18 0-7 144-151
19 0-7 152-159
20 0-7 160-167
21 0-7 168-175
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Pulse-/dynamic correction
Beim Schweißverfahren
MIG/MAG Standard-Manuell:
Dynamic
Wire retract correction UINT16
Welding speed UINT16
Process controlled correction
SINT16
UINT16
-10,0 bis
10,0
[Schritte]
0,0 bis
10,0
[Schritte]
0,0 bis
10,0
[Schritte]
0,0 bis
1000,0
[cm/min]
Siehe Tabelle
Wertebereich
Process control-
led correction auf
Seite 15
10
10
10
10
ü ü
ü
ü
ü
13
Page 14

Adresse
relativ absolut
Prozess-
Image
WORD
BYTE
BIT
22 0-7 176-183
11
23 0-7 184-191
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
BIT
Signal
Aktivität /
Datentyp
Bereich
—
—
—
—
Wire forward / backward
length
UINT16
OFF / 1 bis
65535
[mm]
OFF / 0,5
Wire sense edge detection UINT16
bis 20,0
[mm]
—
—
1
10
Faktor
Standard
Economy
ü
ü
ü
ü
ü
ü
ü
ü
38 0-7 304-311
19
39 0-7 312-319
Wertebereich
Working mode
Wertebereich
Documentation
mode
Seam number UINT16
0 bis
65535
1
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 Parameteranwahl intern
0 0 0 0 1 Kennlinien Betrieb Sonder 2-Takt
0 0 0 1 0 Job-Betrieb
0 1 0 0 0 Kennlinien Betrieb 2-Takt
0 1 0 0 1 MIG/MAG Standard-Manuell 2-Takt
1 0 0 0 1 Kühlmittel-Pumpe stoppen
Wertebereich Betriebsart
Bit 0 Beschreibung
0 Nahtnummer von Stromquelle (intern)
1 Nahtnummer von Roboter (Word 19)
Wertebereich Dokumentationsmodus
ü
14
Page 15

Wertebereich
Process controlled correction
Prozess
Signal
PMC Arc length stabilizer SINT16
Wertebereich prozessabhängige Korrektur
Aktivität /
Wertebereich
Datentyp
Einstellbereich
-327,8 bis +327,7
0,0 bis +5,0 Volt 10
Einheit
DE
Faktor
Wertebereich
Processline
selection
Wertebereich
TWIN mode
Bit 1 Bit 0 Beschreibung
0 0 Prozesslinie 1 (default)
0 1 Prozesslinie 2
1 0 Prozesslinie 3
1 1 Reserviert
Wertebereich Prozesslinien-Auswahl
Bit 1 Bit 0 Beschreibung
0 0 TWIN Single mode
0 1 TWIN Lead mode
1 0 TWIN Trail mode
1 1 Reserve
Wertebereich TWIN-Betriebsart
15
Page 16

Verfügbarkeit
der Ausgangssignale
Ausgangssignale
(von der Stromquelle zum Roboter)
Adresse
relativ absolut
Die nachfolgend angeführten Ausgangssignale sind ab Firmware V1.7.0 des RI
FB PRO/i verfügbar.
Prozess-
Image
WORD
0
BYTE
BIT
0 0 Heartbeat Powersource High/Low 1 Hz
1 1 Power source ready High
2 2 Warning High
3 3 Process active High
0
4 4 Current flow High
5 5 Arc stable- / touch signal High
6 6 Main current signal High
7 7 Touch signal High
0 8 Collisionbox active Low
1 9 Robot Motion Release High
2 10 Wire stick workpiece High
3 11 —
1
4 12 Short circuit contact tip High
5 13
BIT
Signal
Parameter selection internally
Aktivität /
Datentyp
High
Bereich
0 = Kollisi-
on oder
Kabel-
bruch
Standard
Faktor
ü ü
Economy
16
6 14
7 15 Torch body gripped High
Characteristic number
valid
High
Page 17

Adresse
relativ absolut
Prozess-
Image
DE
WORD
1
BYTE
BIT
0 16
1 17 Correction out of range High
2 18 —
3 19 Limitsignal High
2
4 20 —
5 21 —
6 22 Main supply status Low
7 23 —
0 24 Sensor status 1 High
1 25 Sensor status 2 High
2 26 Sensor status 3 High
3 27 Sensor status 4 High
3
4 28 —
5 29 —
6 30 —
BIT
Signal
Command value out of
range
Aktivität /
Datentyp
High
Bereich
Siehe Tabelle Zu-
ordnung Sensorsta-
tus 1-4 auf Seite
19
Faktor
Standard
ü ü
Economy
7 31 —
0 32 —
1 33 —
2 34 —
3 35 Safety status Bit 0 High Siehe Tabelle Wer-
4
4 36 Safety status Bit 1 High
5 37 —
6 38 Notification High
2
7 39 System not ready High
0 40 —
1 41 —
2 42 —
3 43 —
5
4 44 —
5 45 —
6 46 —
tebereich Safety
status auf Seite 19
ü ü
7 47 —
17
Page 18

Adresse
relativ absolut
Prozess-
Image
WORD
3
BYTE
BIT
0 48 Process Bit 0 High
1 49 Process Bit 1 High
2 50 Process Bit 2 High
3 51 Process Bit 3 High
6
4 52 Process Bit 4 High
5 53 —
6 54 Touch signal gas nozzle High
7 55
0 56
1 57
2 58
3 59
7
4 60
BIT
Signal
TWIN synchronization
active
ExtOutput1 <= OPT_Input1
ExtOutput2 <= OPT_Input2
ExtOutput3 <= OPT_Input3
ExtOutput4 <= OPT_Input4
ExtOutput5 <= OPT_Input5
Aktivität /
Datentyp
High
High
High
High
High
High
Bereich
Siehe Tabelle Wer-
tebereich Process
Bit auf Seite 20
Faktor
Standard
ü ü
Economy
5 61
6 62
7 63
8 0-7 64-71
4
9 0-7 72-79
10 0-7 80-87
5
11 0-7 88-95
12 0-7 96-103
6
13 0-7 104-111
14 0-7 112-119
7
15 0-7 120-127
16 0-7 128-135
8
17 0-7 136-143
18 0-7 144-151
9
19 0-7 152-159
ExtOutput6 <= OPT_Input6
ExtOutput7 <= OPT_Input7
ExtOutput8 <= OPT_Input8
Welding voltage UINT16
Welding current UINT16
Wire feed speed SINT16
Actual real value for
seam tracking
Error number UINT16
Warning number UINT16
High
High
High
UINT16
0,0 bis
655,35 [V]
0,0 bis
6553,5 [A]
-327,68
bis 327,67
[m/min]
0 bis
6,5535
0 bis
65535
0 bis
65535
100
10
100
10000
1
1
ü ü
ü ü
ü ü
ü ü
ü
ü
18
Page 19

Adresse
relativ absolut
Prozess-
Image
DE
WORD
BYTE
BIT
20 0-7 160-167
10
21 0-7 168-175
22 0-7 176-183
11
23 0-7 184-191
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
BIT
Signal
Motor current M1 SINT16
Motor current M2 SINT16
Motor current M3 SINT16
—
—
—
Wire position SINT16
Aktivität /
Datentyp
Bereich
-327,68
bis 327,67
[A]
-327,68
bis 327,67
[A]
-327,68
bis 327,67
[A]
-327,68
bis 327,67
[mm]
100
100
100
100
Faktor
Standard
Economy
ü
ü
ü
ü
ü
ü
ü
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
Zuordnung Sensorstatus 1-4
Wertebereich
Safety status
—
—
—
Signal Beschreibung
Sensor status 1 OPT/i WF R Drahtende (4,100,869)
Sensor status 2 OPT/i WF R Drahtfass (4,100,879)
Sensor status 3 OPT/i WF R Ringsensor (4,100,878)
Sensor status 4 Drahtpufferset CMT TPS/i (4,001,763)
Bit 1 Bit 0 Beschreibung
0 0 Reserve
ü
ü
ü
0 1 Halt
1 0 Stopp
19
Page 20

Bit 1 Bit 0 Beschreibung
1 1 Nicht eingebaut / aktiv
Wertebereich
Process Bit
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 kein Prozess oder Parameteranwahl
intern
0 0 0 0 1 MIG/MAG Puls-Synerigc
0 0 0 1 0 MIG/MAG Standard-Synergic
0 0 0 1 1 MIG/MAG PMC
0 0 1 0 0 MIG/MAG LSC
0 0 1 0 1 MIG/MAG Standard-Manuell
0 0 1 1 0 Elektrode
0 0 1 1 1 WIG
0 1 0 0 0 CMT
0 1 0 0 1 ConstantWire
20
Page 21

Table of contents
General 22
Safety 22
Connections and Displays 22
Data Transfer Properties 23
Configuration Parameters 23
Setting the Bus Module IP Address 25
Setting the Bus Module IP Address 25
Input and output signals 27
Data types 27
Availability of Input Signals 27
Input Signals (From Robot to Power Source) 27
Value Range for Working Mode 33
Value Range for Documentation Mode 33
Value range for Process controlled correction 34
Value range Process line selection 34
Value Range for TWIN Mode 34
Availability of Output Signals 35
Output Signals (from Power Source to Robot) 35
Assignment of Sensor Statuses 1–4 38
Value range Safety status 38
Value Range for Process Bit 39
EN-US
21
Page 22

General
1234567
8
Safety
Connections and
Displays
WARNING!
Danger from incorrect operation and work that is not carried out properly.
This can result in serious personal injury and damage to property.
All the work and functions described in this document must only be carried
▶
out by technically trained and qualified personnel.
Read and understand this document in full.
▶
Read and understand all safety rules and user documentation for this equip-
▶
ment and all system components.
1 TX+
2 TX-
3 RX+
6 RX-
4,5,7,8Not normally used; to ensu-
re signal completeness, these pins must be interconnected and, after passing
through a filter circuit, must
terminate at the ground
conductor (PE).
RJ45 connection
(1) LED MS - Module status
Off:
No supply voltage
Lights up green:
Controlled by a master
Flashes green (once):
Master not configured or master idle
Lights up red:
Major error (exception state, serious
fault, ...)
Flashes red:
Correctable error
22
Page 23

(2) LED NS - Network status
Off:
No supply voltage or no IP address
Lights up green:
Online, one or more connections established (CIP category 1 or 3)
Data Transfer
Properties
Flashes green:
Online, no connection established
Lights up red:
Double IP address, serious error
Flashes red:
Overrun of time for one or more
connections (CIP category 1 or 3)
Transfer technology
Ethernet
Medium
When selecting the cables and plugs, the ODVA recommendation for the planning and installation of EtherNet/IP systems must be observed.
The EMC tests were carried out by the manufacturer with the cable IEC5ES8VG0030M40M40-F.
Transmission speed
10 Mbit/s or 100 Mbit/s
Bus connection
RJ-45 Ethernet / M12
EN-US
Configuration
Parameters
In some robot control systems, it may be necessary to state the configuration parameters described here so that the bus module can communicate with the robot.
Parameter Value Description
Vendor ID 0534
Device Type 000C
Product Code 0320
hex
hex
hex
(1332
(12
dec
(800
) Fronius International GmbH
dec
) Communication adapter
) Fronius FB Pro Ethernet/IP-2-Port
dec
Product Name Fronius-FB-Pro-EtherNetIP(TM)
Size
Image Type
Standard
Image
Instance
Type
Produ-
cing In-
stance
Instance
Name
Input Da-
ta Stan-
dard
Instance
Description
Data from power
source to robot
Instance
Number
100 40
[Byt
e]
23
Page 24

Image Type
Instance
Type
Instance
Name
Instance
Description
Instance
Number
Size
[Byt
e]
Con-
suming
Instance
Economy
Image
Con-
Produ-
cing In-
stance
suming
Instance
Output
Data
Standard
Input Da-
ta Stan-
dard
Output
Data
Standard
Data from robot
to power source
Data from power
source to robot
Data from robot
to power source
150 40
101 16
151 16
24
Page 25

Setting the Bus Module IP Address
Setting the Bus
Module IP Address
You can set the bus module IP address
as follows:
Using the DIP switch in the inter-
1.
face within the range defined by
192.168.0.xx
(xx = DIP switch setting = 1 to 63)
All positions are set to the
-
OFF position at the factory. In
this case, the IP address must
be set on the website of the
power source
On the website of the power
2.
source (if all positions of the DIP
switch are set to the OFF position)
The IP address is set using DIP switch positions 1 to 6. The configuration is carried out in binary format. This results in a configuration range of 1 to 63 in decimal
format.
Example for setting the IP address of the bus module using the DIP switch in
the interface:
Dip switch
EN-US
8 7 6 5 4 3 2 1 IP address
- -
- -
- -
- -
- -
OFF OFF OFF OFF OFF ON
OFF OFF OFF OFF ON OFF
OFF OFF OFF OFF ON ON
ON ON ON ON ON OFF
ON ON ON ON ON ON
1
2
3
62
63
Instructions for setting the IP address on the website of the power source:
Note down the IP address of the power source used:
On the power source control panel, select "Defaults"
1
On the power source control panel, select "System"
2
On the power source control panel, select "Information"
3
Note down the displayed IP address (example: 10.5.72.13)
4
Access website of the power source in the internet browser:
Connect the computer to the network of the power source
5
Enter the IP address of the power source in the search bar of the internet
6
browser and confirm
Enter the standard user name (admin) and password (admin)
7
The website of the power source is displayed
-
Set the bus module IP address:
On the power source website, select the "RI FB PRO/i" tab
8
25
Page 26

Enter the desired IP address for the interface under "Module configuration".
9
For example: 192.168.0.12
Select "Set configuration"
10
Select "Restart module"
11
The set IP address is applied
-
26
Page 27

Input and output signals
Data types The following data types are used:
UINT16 (Unsigned Integer)
-
Whole number in the range from 0 to 65535
SINT16 (Signed Integer)
-
Whole number in the range from -32768 to 32767
Conversion examples:
for a positive value (SINT16)
-
e.g. desired wire speed x factor
12.3 m/min x 100 = 1230
for a negative value (SINT16)
-
e.g. arc correction x factor
-6.4 x 10 = -64
= FFC0
dec
= 04CE
dec
hex
EN-US
hex
Availability of
Input Signals
Input Signals
(From Robot to
Power Source)
The input signals listed below are available as of firmware V1.7.0 of the RI FB
PRO/i.
27
Page 28

Address
relative absolute
Process
image
WORD
0
BYTE
BIT
0 0 Welding Start
1 1 Robot ready High
2 2 Working mode Bit 0 High
3 3 Working mode Bit 1 High
0
4 4 Working mode Bit 2 High
5 5 Working mode Bit 3 High
6 6 Working mode Bit 4 High
7 7 —
0 8 Gas on
1 9 Wire forward
2 10 Wire backward
3 11 Error quit
1
BIT
Signal
Activity /
data type
Increa-
sing
Increa-
sing
Increa-
sing
Increa-
sing
Increa-
sing
Range
See table Value
Working Mode on
Range for
page 33
Factor
Standard
ü ü
Economy
4 12 Touch sensing High
5 13 Torch blow out
6 14 Process line selection Bit 0 High See table Value
7 15 Process line selection Bit 1 High
Increa-
sing
range Process li-
ne selection on
page 34
28
Page 29

Address
relative absolute
Process
image
WORD
1
BYTE
BIT
0 16 Welding Simulation High
1 17 Synchro pulse on High
2 18 —
3 19 —
2
4 20 —
5 21 —
6 22 Wire brake on High
7 23 Torchbody Xchange High
0 24 —
1 25 Teach mode High
2 26 —
3 27 —
4 28 —
3
5 29 Wire sense start
6 30 Wire sense break
BIT
Signal
Activity /
data type
Increa-
sing
Increa-
sing
Range
Factor
Standard
ü ü
Economy
EN-US
7 31 —
29
Page 30

Address
relative absolute
Process
image
WORD
2
BYTE
BIT
0 32 TWIN mode Bit 0 High See table Value
1 33 TWIN mode Bit 1 High
2 34 —
3 35 —
4
4 36 —
5 37 Documentation mode High
6 38 —
7 39 —
0 40 —
1 41 —
2 42 —
3 43 —
5
4 44 —
BIT
Signal
Activity /
data type
Range
Range for TWIN
Mode on page
See table Value
Range for Documentation Mode
on page 33
34
Factor
Standard
ü ü
Economy
5 45 —
6 46 —
7 47
Disable process controlled
correction
High
30
Page 31

Address
relative absolute
Process
image
WORD
3
BYTE
BIT
0 48 —
1 49 —
2 50 —
3 51 —
6
4 52 —
5 53 —
6 54 —
7 55 —
0 56
1 57
2 58
3 59
7
4 60
BIT
Signal
ExtInput1 => OPT_Output
1
ExtInput2 => OPT_Output
2
ExtInput3 => OPT_Output
3
ExtInput4 => OPT_Output
4
ExtInput5 => OPT_Output
5
Activity /
data type
High
High
High
High
High
Range
Factor
Standard
ü ü
Economy
EN-US
5 61
6 62
7 63
8 0-7 64-71
4
9 0-7 72-79
10,
5
0-7 80-95
11
ExtInput6 => OPT_Output
6
ExtInput7 => OPT_Output
7
ExtInput8 => OPT_Output
8
Welding characteristic- /
Job number
With the welding process
MIG/MAG pulse synergic,
MIG/MAG standard synergic,
MIG/MAG standard manual,
MIG/MAG PMC,
MIG/MAG LSC,
CMT,
ConstantWire:
Wire feed speed command
value
With the Job mode:
Power correction
High
High
High
UINT16 0 to 1000 1
-327.68 to
SINT16
SINT16
327.67
[m/min]
-20.00 to
20.00
[%]
100
100
ü ü
ü ü
31
Page 32

Address
relative absolute
Process
image
WORD
6
BYTE
12,
0-7 96-111
13
BIT
BIT
Signal
With the welding process
MIG/MAG pulse synergic,
MIG/MAG standard synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Arclength correction
With the welding process
MIG/MAG standard manual:
Welding voltage
With the Job mode:
Arclength correction
With the welding process
ConstantWire:
Hotwire current
Activity /
data type
SINT16
UINT16
SINT16
UINT16
Range
-10.0 to
10.0
[Steps]
0.0 to
6553.5 [V]
-10.0 to
10.0
[Steps]
0.0 to
6553.5 [A]
10
10
10
10
Factor
Standard
ü ü
Economy
14,
7
8
9
10
0-7 112-127
15
16 0-7 128-135
17 0-7 136-143
18 0-7 144-151
19 0-7 152-159
20 0-7 160-167
21 0-7 168-175
With the welding process
MIG/MAG pulse synergic,
MIG/MAG standard synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Pulse-/dynamic correction
With the welding process
MIG/MAG standard manual:
Dynamic
Wire retract correction UINT16
Welding speed UINT16
Process controlled correction
SINT16
UINT16
-10.0 to
10.0
[Steps]
0.0 to 10.0
[Steps]
0.0 to 10.0
[Steps]
0.0 to
1000.0
[cm/min]
See table Value
range for Pro-
cess controlled
correction on pa-
ge 34
10
10
10
10
ü ü
ü
ü
ü
32
22 0-7 176-183
11
23 0-7 184-191
—
ü
Page 33

Address
relative absolute
Process
image
WORD
BYTE
BIT
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
BIT
Signal
Activity /
data type
Range
—
—
—
Wire forward / backward
length
UINT16
OFF / 1 to
65535
[mm]
OFF / 0.5
Wire sense edge detection UINT16
to 20.0
10
[mm]
—
—
Seam number UINT16 0 to 65535 1
Factor
Standard
Economy
EN-US
ü
ü
ü
1
ü
ü
ü
ü
ü
Value Range for
Working Mode
Value Range for
Documentation
Mode
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Description
0 0 0 0 0 Internal parameter selection
0 0 0 0 1 Special 2-step mode characteristics
0 0 0 1 0 Job mode
0 1 0 0 0 2-step mode characteristics
0 1 0 0 1 2-step MIG/MAG standard manual
1 0 0 0 1 Stop coolant pump
Value range for operating mode
Bit 0 Description
0 Seam number of power source (internal)
1 Seam number of robot (Word 19)
Value range for documentation mode
33
Page 34

Value range for
Process controlled correction
Process
Signal
PMC Arc length stabilizer SINT16
Value range for process-dependent correction
Activity /
Value range
configuration
data type
-327.8 to +327.7
0.0 to +5.0 Volts 10
range
Unit
Factor
Value range Process line selection
Value Range for
TWIN Mode
Bit 1 Bit 0 Description
0 0 Process line 1 (default)
0 1 Process line 2
1 0 Process line 3
1 1 Reserved
Value range for process line selection
Bit 1 Bit 0 Description
0 0 TWIN Single mode
0 1 TWIN Lead mode
1 0 TWIN Trail mode
1 1 Reserved
Value range for TWIN mode
34
Page 35

Availability of
Output Signals
Output Signals
(from Power
Source to Robot)
Address
relative absolute
The output signals listed below are available as of firmware V1.7.0 of the RI FB
PRO/i.
EN-US
Process
image
WORD
0
BYTE
BIT
0 0 Heartbeat Powersource High/Low 1 Hz
1 1 Power source ready High
2 2 Warning High
3 3 Process active High
0
4 4 Current flow High
5 5 Arc stable- / touch signal High
6 6 Main current signal High
7 7 Touch signal High
0 8 Collisionbox active Low
1 9 Robot Motion Release High
2 10 Wire stick workpiece High
3 11 —
1
4 12 Short circuit contact tip High
5 13
BIT
Signal
Parameter selection internally
Activity /
data type
High
Range
0 = collisi-
on or cable break
Standard
Factor
ü ü
Economy
6 14
7 15 Torch body gripped High
Characteristic number
valid
High
35
Page 36

Address
relative absolute
Process
image
WORD
1
BYTE
BIT
0 16
1 17 Correction out of range High
2 18 —
3 19 Limitsignal High
2
4 20 —
5 21 —
6 22 Main supply status Low
7 23 —
0 24 Sensor status 1 High
1 25 Sensor status 2 High
2 26 Sensor status 3 High
3 27 Sensor status 4 High
3
4 28 —
5 29 —
6 30 —
BIT
Signal
Command value out of
range
Activity /
data type
High
Range
See table Assign-
ment of Sensor Sta-
tuses 1–4 on page
38
Factor
Standard
ü ü
Economy
7 31 —
0 32 —
1 33 —
2 34 —
3 35 Safety status Bit 0 High See table Value ran-
4
4 36 Safety status Bit 1 High
5 37 —
6 38 Notification High
2
7 39 System not ready High
0 40 —
1 41 —
2 42 —
3 43 —
5
4 44 —
5 45 —
6 46 —
ge Safety status on
page 38
ü ü
36
7 47 —
Page 37

Address
relative absolute
Process
image
WORD
3
BYTE
BIT
0 48 Process Bit 0 High
1 49 Process Bit 1 High
2 50 Process Bit 2 High
3 51 Process Bit 3 High
6
4 52 Process Bit 4 High
5 53 —
6 54 Touch signal gas nozzle High
7 55
0 56
1 57
2 58
3 59
7
4 60
BIT
Signal
TWIN synchronization
active
ExtOutput1 <= OPT_Input1
ExtOutput2 <= OPT_Input2
ExtOutput3 <= OPT_Input3
ExtOutput4 <= OPT_Input4
ExtOutput5 <= OPT_Input5
Activity /
data type
High
High
High
High
High
High
Range
See table Value
Range for Process
Bit on page 39
Factor
Standard
ü ü
Economy
EN-US
5 61
6 62
7 63
8 0-7 64-71
4
9 0-7 72-79
10 0-7 80-87
5
11 0-7 88-95
12 0-7 96-103
6
13 0-7 104-111
14 0-7 112-119
7
15 0-7 120-127
16 0-7 128-135
8
17 0-7 136-143
18 0-7 144-151
9
19 0-7 152-159
ExtOutput6 <= OPT_Input6
ExtOutput7 <= OPT_Input7
ExtOutput8 <= OPT_Input8
Welding voltage UINT16
Welding current UINT16
Wire feed speed SINT16
Actual real value for
seam tracking
Error number UINT16
Warning number UINT16
High
High
High
UINT16
0.0 to
655.35 [V]
0.0 to
6553.5 [A]
-327.68 to
327.67 [m/
min]
0 to
6.5535
0 to
65535
0 to
65535
100
10
100
10000
1
1
ü ü
ü ü
ü ü
ü ü
ü
ü
37
Page 38

Address
relative absolute
Process
image
WORD
BYTE
BIT
20 0-7 160-167
10
21 0-7 168-175
22 0-7 176-183
11
23 0-7 184-191
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
34 0-7 272-279
17
35 0-7 280-287
BIT
Signal
Motor current M1 SINT16
Motor current M2 SINT16
Motor current M3 SINT16
—
—
—
Wire position SINT16
—
Activity /
data type
Range
-327.68 to
327.67 [A]
-327.68 to
327.67 [A]
-327.68 to
327.67 [A]
-327.68 to
327.67
[mm]
100
100
100
100
Factor
Standard
Economy
ü
ü
ü
ü
ü
ü
ü
ü
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
Assignment of
Sensor Statuses
1–4
Value range
Safety status
—
—
Signal Description
Sensor status 1 OPT/i WF R wire end (4,100,869)
Sensor status 2 OPT/i WF R wire drum (4,100,879)
Sensor status 3 OPT/i WF R ring sensor (4,100,878)
Sensor status 4 Wire buffer set CMT TPS/i (4,001,763)
Bit 1 Bit 0 Description
0 0 Reserve
ü
ü
38
0 1 Hold
1 0 Stop
1 1 Not installed / active
Page 39

Value Range for
Process Bit
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Description
0 0 0 0 0 No internal parameter selection or
process
0 0 0 0 1 MIG/MAG pulse synergic
0 0 0 1 0 MIG/MAG standard synergic
0 0 0 1 1 MIG/MAG PMC
0 0 1 0 0 MIG/MAG LSC
0 0 1 0 1 MIG/MAG standard manual
0 0 1 1 0 Electrode
0 0 1 1 1 TIG
0 1 0 0 0 CMT
0 1 0 0 1 ConstantWire
EN-US
39
Page 40

 Loading...
Loading...