

Page 1

Operating
Instructions
RI FB/i Yaskawa WeldCom 2.0
RI MOD/i CC Modbus TCP-2P
Bedienungsanleitung
DE
42,0426,0218,DE 029-15072022
Page 2

Page 3

Inhaltsverzeichnis
Allgemeines 5
Sicherheit 5
Gerätekonzept 5
Blockschaltbild 6
Lieferumfang 6
Erforderliche Werkzeuge und Hilfsmittel 6
Montagebestimmungen 6
Anschlüsse und Anzeigen 7
Anschlüsse am Roboter-Interface 7
Belegung des Anschlusses M12 7
LEDs am Print des Roboter-Interfaces 8
LEDs zur Diagnose der Spannugsversorgung 9
LEDs zur Diagnose der Netzwerk-Verbindung 9
Anschlüsse und Anzeigen am RJ 45 Modul 10
Beispiele für die Verwendung des Anschlusses M12 12
Beispiele für die Verwendung des Anschlusses M12 12
Technische Daten 13
Umgebungsbedingungen 13
Technische Daten Roboter-Interface 13
Eigenschaften der Datenübertragung 13
Konfigurationsparameter 14
Roboter-Interface konfigurieren 15
Allgemeines 15
Konfiguration des Prozess-Image 15
IP-Adresse einstellen 15
Roboter-Interface konfigurieren 16
Roboter-Interface einbauen 17
Sicherheit 17
Vorbereitung 17
Anschluss M12 einbauen 18
Datenkabel verlegen 19
Roboter-Interface einbauen 20
Abschließende Tätigkeiten 20
Busmodul einbauen 21
Sicherheit 21
Busmodul einbauen 21
Ein- und Ausgangssignale 22
Datentypen 22
Eingangssignale 22
Wertebereich Processline selection 25
Wertebereich TWIN mode 25
Wertebereich Documentation mode 26
Wertebereich Working mode 26
Wertebereich Command value selection 26
Ausgangssignale 27
Wertebereich Schweißverfahren und Prozess-Image 30
Zuordnung Sensorstatus 1-3 30
Wertebereich Safety status 31
TAG-Tabelle 31
Ein- und Ausgangssignale Retrofit-Image 34
Eingangssignale 34
Wertebereich Betriebsart 35
Ausgangssignale 37
TAG-Tabelle 38
Modbus - Allgemeine Informationen 40
Protokollbeschreibung 40
Datencodierung 40
Application Data Unit (ADU) 41
Modbus - Funktionen 42
03 (03) Read Holding Register 42
DE
3
Page 4

06 (06) Write Single Register 43
16 (10) Write Multiple Register 45
23 (17) Read/Write Multiple Register 47
103 (67) Read Holding Register Float 48
104 (68) Write Single Register Float 49
4
Page 5

Allgemeines
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
DE
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen
▶
nur von technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses
▶
Gerätes und aller Systemkomponenten lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Personen- und Sachschäden können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
WARNUNG!
Gefahr durch unplanmäßige Signalübertragung.
Schwere Personen- und Sachschäden können die Folge sein.
Über das Interface keine sicherheitsrelevanten Signale übertragen.
▶
Gerätekonzept Das Roboter-Interface dient als Schnittstelle zwischen der Stromquelle und
standardisierten Busmodulen für verschiedenste Kommunikationsprotokolle.
Der Einbau des Roboter-Interface in die Stromquelle kann entweder bereits
werkseitig durch Fronius oder nachträglich durch entsprechend geschultes Fachpersonal erfolgen.
(1) Roboter-Steuerung
(2) Datenkabel SpeedNet
(3) Roboter-Interface
5
Page 6

Blockschaltbild
Spider NT241
RI FB/i Yaskawa
WeldCom 2.0
Data
24 V
Module
(1)
(2)
(4)
(5)
(3)
(4) Stromquelle
(5) Kühlgerät
(6) Verbindungs-Schlauchpaket
(7) Drahtvorschub
(8) Roboter
Lieferumfang
Erforderliche
Werkzeuge und
Hilfsmittel
Schraubendreher TX8
-
Schraubendreher TX20
-
Schraubendreher TX25
-
Seitenschneider
-
(1) RI FB/i Yaskawa WeldCom 2.0
(2) Datenkabel
4-polig
(3) Anschluss M12 (5-polig)
mit Verbindungskabel
(4) Kabelbinder
(5) 2 Schrauben für Anschluss M12
(6) Diese Bedienungsanleitung
(ohne Abbildung)
Montagebestimmungen
Das Roboter-Interface darf nur in die dafür vorgesehene Öffnung an der Rückseite der Stromquelle eingebaut werden.
6
Page 7

Anschlüsse und Anzeigen
(2) (3)
(1)
(1) (2)
(3)(4)
(5)
DE
Anschlüsse am
Roboter-Interface
Belegung des
Anschlusses
M12
(1) Anschluss Stromversorgung
2-polig
(2) Anschluss Datenkabel Speed-
Net
4-polig
(3) Anschluss Busmodul
WeldCom 2.0 Retrofit
(1) CAT-Signal CAT-Signal
(2) Touched Arc Stable
(3) CAT-Signal GND CAT-Signal GND
(4) Touched GND Arc Stable GND
(5) n.c (not connected)
7
Page 8

LEDs am Print
(14)
(13)
(12)
(11)
(2)
(1)
(9)
(10)
(8)
(7)
(3) (4)
(5) (6)
des Roboter-Interfaces
(1) LED ETH1 grün Zur Diagnose der Netzwerk-Verbin-
dung.
Datails siehe nachfolgender Abschnitt
(2) LED ETH2 orange
"LEDs zur Diagnose der Netzwerk-Verbindung“
(3) LED 3 grün
keine Funktion
(4) LED 4 grün
blinkt mit 4 Hz = keine Verbindung
-
zum SpeedNet
blinkt mit 20 Hz = Verbindung
(5) LED 5 grün
-
zum SpeedNet wird hergestellt
blinkt mit 1 Hz = Verbindung zum
-
SpeedNet hergestellt
leuchtet bei internem Fehler.
(6) LED 6 rot
Fehlerbehebung: Roboter-Interface
neu starten. Bringt dies keine Besserung, den Servicedienst verständigen.
(7) LED +3V3 grün Zur Diagnose der Spannungsversor-
gung.
Datails siehe nachfolgender Abschnitt
(8) LED +24V grün
"LEDs zur Diagnose der Spannugsversorgung“
(9) LED DIG OUT 2 grün
Digitaler Ausgang 2. LED leuchtet,
wenn aktiv
8
Page 9

(10) LED DIG OUT 1 grün
(11) LED 11 grün
Digitaler Ausgang 1. LED leuchtet,
wenn aktiv
DE
LEDs zur Diagnose der Spannugsversorgung
(12) LED 12 grün
(13) LED 13 grün
(14) LED 14 grün
LED Anzeige Bedeutung Ursache
Aus
+24V
Leuchtet
Aus
+3V3
Keine Versorgungsspannung
für das Interface vorhanden
24 VDC Versorgungsspannung am Roboter-Interface
vorhanden
Keine Betriebsspannung am
Roboter-Interface vorhanden
keine Funktion
-
-
-
-
Stromversorgung für
das Roboter-Interface
nicht hergestellt
Stromversorgungs-Kabel defekt
24 VDC Versorgungsspannung nicht vorhanden
Netzteil am Roboter-Interface defekt
LEDs zur Diagnose der Netzwerk-Verbindung
3 VDC Betriebsspannung
Leuchtet
LED Anzeige Bedeutung Ursache
Aus
ETH1
Leuchtet
blinkt Datenübertragung aktiv
Aus
ETH2
Leuchtet
am Roboter-Interface vorhanden
Keine Netzwerk-Verbindung
vorhanden
Netzwerk-Verbindung vorhanden
Übertragungsgeschwindigkeit 10 Mbit/s
Übertragungsgeschwindigkeit 100 Mbit/s
Netzwerkverbindung
-
für das Interface nicht
hergestellt
Netzwerk-Kabel defekt
-
9
Page 10

Anschlüsse und
(12)(11)(10)
(14)(13)
(9)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
Anzeigen am RJ
45 Modul
(11) RJ 45 Ethernet Anschluss 2
(12) RJ 45 Ethernet Anschluss 1
(13) LED Verbindung/Aktivität 1
(14) LED Netzwerkstatus
(1) TX+
(2) TX-
(3) RX+
(6) RX-
(4) Normalerweise nicht verwen-
(5)
(7)
(8)
det; um die Signalvollständigkeit sicherzustellen, sind diese Pins miteinander verbunden und enden über einen Filterkreis am Schutzleiter (PE).
(9) LED Verbindung/Aktivität 2
(10) LED Modulstatus
LED Netzwerkstatus:
Status Bedeutung
Aus keine IP-Adresse oder Ausnahmezustand
Leuchtet grün mindestens eine Modbus-Nachricht erhalten
Blinkt grün wartet auf die erste Modbus-Nachricht
Leuchtet rot IP-Adressen-Konflikt, schwerer Fehler
Blinkt rot Verbindungs-Timeout. Innerhalb des definierten Zeit-
raumes „Prozess aktiv Timeout“ wurde keine ModbusNachricht erhalten
LED Modulstatus:
Status Bedeutung
Aus keine Versorgungsspannung
Leuchtet grün normaler Betrieb
Leuchtet rot Hauptfehler (Ausnahmezustand, schwerer Fehler, ....)
Blinkt rot Kleinere Fehler
Abwechselnd rot/
Firmware-Update läuft
grün
LED Verbindung/Aktivität:
Status Bedeutung
Aus Keine Verbindung, keine Aktivität
10
Leuchtet grün Verbindung hergestellt (100 Mbit/s)
Flackert grün Aktivität (100 Mbit/s)
Leuchtet gelb Verbindung hergestellt (10 Mbit/s)
Page 11

LED Verbindung/Aktivität:
Status Bedeutung
Flackert gelb Aktivität (10 Mbit/s)
DE
11
Page 12
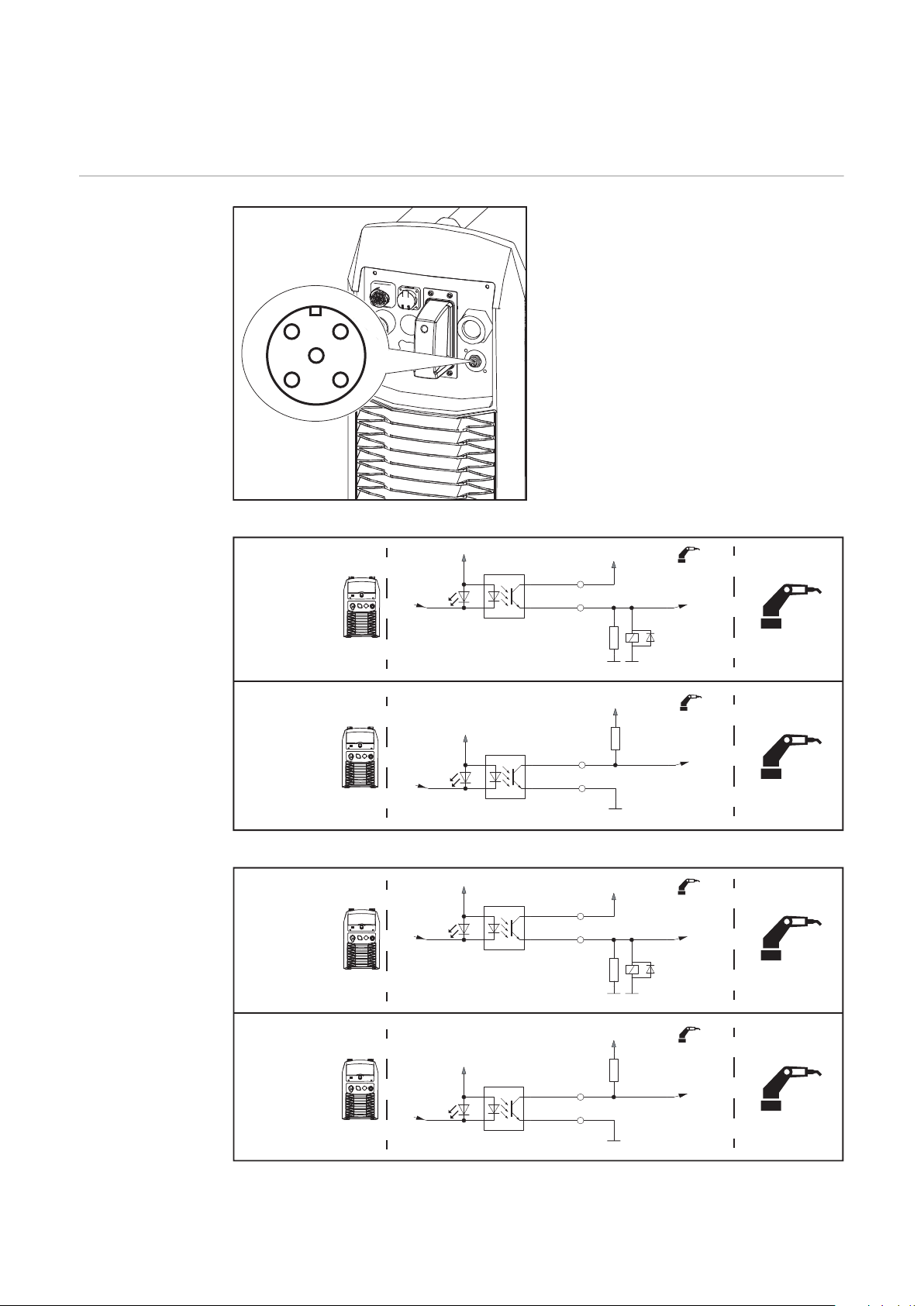
Beispiele für die Verwendung des Anschlusses
1 2
34
5
Pin 1 / M12
Pin 3 / M12
Pin 3 / M12
Pin 1 / M12
High-active =
Low-active =
+ 24 V from
+ 24 V from
+ 24 V
DC
/ 20 mA
+ 24 V
DC
/ 20 mA
uP
uP
max. 100 V
LED (10)
V
CC
V
CC
LED (10)
max. 100 V
Pin 2 / M12
Pin 4 / M12
Pin 4 / M12
Pin 2 / M12
High-active =
Low-active =
+ 24 V from
+ 24 V from
+ 24 V
DC
/ 20 mA
+ 24 V
DC
/ 20 mA
uP
uP
max. 100 V
max. 100 V
LED (9)
LED (9)
V
CC
V
CC
M12
Beispiele für die
Verwendung des
Anschlusses
M12
Anschluss M12 an der Stromquelle
12
CAT-Signal (DIG OUT1):
WeldCom 2.0 = Touched, Retrofit = Arc Stable (DIG OUT 2)
Page 13
Technische Daten
DE
Umgebungsbedingungen
Technische Daten Roboter-Interface
VORSICHT!
Gefahr durch unzulässige Umgebungsbedingungen.
Schwere Geräteschäden können die Folge sein.
Das Gerät nur bei den nachfolgend angegebenen Umgebungsbedingungen
▶
lagern und betreiben.
Temperaturbereich der Umgebungsluft:
beim Betrieb: -10 °C bis +40 °C (14 °F bis 104 °F)
-
bei Transport und Lagerung: -20 °C bis +55 °C (-4 °F bis 131 °F)
-
Relative Luftfeuchtigkeit:
bis 50 % bei 40 °C (104 °F)
-
bis 90 % bei 20 °C (68 °F)
-
Umgebungsluft: frei von Staub, Säuren, korrosiven Gasen oder Substanzen,
usw.
Höhenlage über dem Meeresspiegel: bis 2000 m (6500 ft).
Spannungsversorgung intern (24 V)
Schutzart IP 23
Eigenschaften
der Datenübertragung
Anschluss RJ45
Übertragungstechnik:
Ethernet
Medium (4 x 2 Twisted-Pair-Kupferkabel):
ab Kategorie 5 (100 Mbit/s)
Übertragungs-Geschwindigkeit:
10 Mbit/s oder 100 Mbit/s
Busanschluss:
Ethernet RJ 45
Anschluss M12
Spannung:
24 V
Strombelastung pro Ausgang:
max. 20 mA
13
Page 14
Konfigurationsparameter
Bei einigen Roboter-Steuerungen kann es erforderlich sein die hier beschriebenen Konfigurationsparameter anzugeben, damit das Busmodul mit dem Roboter kommunizieren kann.
Parameter Wert
Vendor Name Fronius International GmbH
Product Code 0340
hex
(832
dec
)
Major / Minor Revisi-onV1.00
Vendor URL www.fronius.com
Product Name yaskawa-weldcom2-0-modbus-tcp
Model Name yaskawa-weldcom2-0
User Application Na-meFronius welding controller for the series TPS/i Weld-
Com2.0 (ModbusTCP)
14
Page 15

Roboter-Interface konfigurieren
(1)
(2)
DE
Allgemeines
Konfiguration
des ProzessImage
Der DIP‑Schalter am Roboter-Interface dient zur Einstellung:
des Prozess-Image (Standard-
-
Image, Retrofit-Image)
der IP-Adresse
-
Werkseitige Einstellung des ProzessImage:
Position 7 und 8 des DIP-Schalters in
der Stellung OFF (1) = StandardImage = Weldcom V2.0
Werkseitige Einstellung der IP-Adresse
= 192.168.255.210:
Position 6, 5, 3, 1 des DIP-Schal-
-
ters in der Stellung OFF (1)
Position 2 und 4 des DIP-Schalters
-
in der Stellung ON (2)
DIP-Schalter
8 7 6 5 4 3 2 1 Konfiguration
OFF OFF
OFF ON
- - - - - -
- - - - - -
Standard-Image
(Weldcom V2.0)
Nicht verwendet
IP-Adresse einstellen
ON OFF
ON ON
- - - - - -
- - - - - -
Retrofit-Image
(Weldcom TPS-Serie)
Nicht verwendet
Über das Prozess-Image wird der Umfang der übertragenen Datenmenge und die
Systemkompatibilität definiert.
Die IP-Adresse kann folgendermaßen eingestellt werden:
über die DIP-Schalter im Bereich 192.168.255.2xx
-
(xx = DIP-Schalterstellung = 01 bis 55)
Einstellung über die DIP-Schalter:
DIP-Schalter
IP-Adresse
8 7 6 5 4 3 2 1
- -
- -
OFF OFF OFF OFF OFF ON
OFF OFF OFF OFF ON OFF
192.168.255.201
192.168.255.202
:
- -
ON ON OFF ON ON OFF
192.168.255.254
- -
ON ON OFF ON ON ON
192.168.255.255
15
Page 16

Die IP-Adresse kann mit den Positionen 1 bis 6 des DIP-Schalters eingestellt
werden.
Die Einstellung erfolgt im Binärformat. Der Einstellbereich beträgt 01 bis 55 im
Dezimalformat.
Bei Auslieferung ist über die DIP-Schalter folgende IP-Adresse eingestellt:
IP-Adresse: 192.168.255.210
-
Subnet-Mask: 255.255.255.0
-
Default-Gateway: 0.0.0.0
-
Roboter-Interface konfigurieren
DIP‑Schalter entsprechend der gewünschten Konfiguration einstellen
1
HINWEIS!
Riskio durch unwirksame DIP-Schalter-Einstellungen.
Funktionsstörungen können die Folge sein.
Nach jeder Änderung der DIP-Schalter-Einstellungen einen Neustart des In-
▶
terfaces durchführen. Nur dadurch werden die Einstellungen wirksam.
Neustart des Interfaces = Unterbrechen und Wiederherstellen der Span-
▶
nungsversorgung oder Ausführen der entsprechenden Funktion auf der
Webseite der Stromquelle (SmartManager).
16
Page 17

Roboter-Interface einbauen
DE
Sicherheit
Vorbereitung
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und vom Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes si-
▶
cherstellen, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen sind.
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl ver-
▶
wenden.
1 2
3 4
17
Page 18

5
Anschluss M12
einbauen
1 2
3 4
18
Page 19

5 6
DE
Datenkabel verlegen
1 2
3
19
Page 20

Roboter-Interface einbauen
1 2
Abschließende
Tätigkeiten
1 2
20
Page 21

Busmodul einbauen
DE
Sicherheit
Busmodul einbauen
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl ver-
▶
wenden.
1 2
3
21
Page 22

Ein- und Ausgangssignale
Datentypen Folgende Datentypen werden verwendet:
UINT16 (Unsigned Integer)
-
Ganzzahl im Bereich von 0 bis 65535
SINT16 (Signed Integer)
-
Ganzzahl im Bereich von -32768 bis 32767
Umrechnungsbeispiele:
für positiven Wert (SINT16)
-
z.B. gewünschter Drahtvorschub x Faktor
12.3 m/min x 100 = 1230
für negativen Wert (SINT16)
-
z.B. gewünschte Lichtbogen-Korrektur x Faktor
-6.4 x 10 = -64
Eingangssignale vom Roboter zur Stromquelle
gültig ab Firmware V2.3.0
= FFC0
dez
= 04CE
dez
hex
hex
HEX
Adres
s Signal Type
F000 Control Flag Group 1
Bit 0 to 7 Process active timeout Byte ms 10
F001
Bit 8 to
15
Control Flag Group 2
Bit 0 Welding start Boolean
Bit 1 Robot ready Boolean
Bit 2 Source error reset Boolean
Bit 3 Gas on Boolean
Bit 4 Wire inching Boolean
Bit 5 Wire retract Boolean
Bit 6 Torch blow out Boolean
Bit 7 Welding simulation Boolean
Bit 8 Touch sensing Boolean
Bit 9 Reserved
Bit 10 SFI ON Boolean
Reserved
Range /
Unit
Factor
22
Bit 11 Synchro pulse on Boolean
Bit 12 WireBrake Boolean
Bit 13 Torch XChange Boolean
Bit 14 TeachMode Boolean
Bit 15 Reserved
Page 23

HEX
Adres
s Signal Type
F002 Control Flag Group 3
Range /
Unit
Factor
DE
Bit 0 Process line selection
Bit 0
Bit 1 Process line selection
Bit 1
Bit 2 TWIN mode Bit 0 Boolean
Bit 3 TWIN mode Bit 1
Bit 4-9 Reserved
Bit 10 Active heat control Boolean
Bit 11 Wire sense start Boolean
Bit 12 Wire sense break Boolean
Bit 13-15 Reserved Boolean
F003 Control Flag Group 4
Boolean
Siehe Wer-
tebereich
Processli-
Boolean
Boolean
ne selec-
tion auf
Seite 25
Siehe Wer-
tebereich
TWIN mo-
de auf Sei-
te 25
Bit 0 Documentation mode Boolean Siehe Wer-
tebereich
Documentation mo-
de auf Sei-
te 26
Bit 1-15 Reserved
F004 Control Flag Group 5
Bit 0 to
15
F005 Control Flag Group 6
Bit 0 to
15
F006 Control Flag Group 7
Bit 0 to
15
Reserved
Reserved
Reserved
23
Page 24

HEX
Adres
s Signal Type
F007 Control Flag Group 8
Range /
Unit
Factor
F008
Bit 0 ExtInput1 =>
OPT_Output 1
Bit 1 ExtInput2 =>
OPT_Output 2
Bit 2 ExtInput3 =>
OPT_Output 3
Bit 3 ExtInput4 =>
OPT_Output 4
Bit 4 ExtInput5 =>
OPT_Output 5
Bit 5 ExtInput6 =>
OPT_Output 6
Bit 6 ExtInput7 =>
OPT_Output 7
Bit 7 ExtInput8 =>
OPT_Output 8
Bit 8 to
15
Working mode
Bit 0 Working Mode Bit 0
Bit 1 Working Mode Bit 1
Bit 2 Working Mode Bit 2
Bit 3 Working Mode Bit 3
Reserved
Boolean
Boolean
Boolean
Boolean
Boolean
Boolean
Boolean
Boolean
Siehe Wer-
tebereich
Working
mode auf
Seite 26
Bit 4 Working Mode Bit 4
Bit 5 to
13
Bit 14 Command value selec-
Bit 15 Reserved
F009 Job number UINT16 0 bis 1000
F00A Program number (xml-file) UINT16 0 bis 65535
F00B Feeder command Value SINT16 -327,68 bis
F00C Arc length correction SINT16 -10 bis +10 10
F00D Puls/Dynamik correction SINT16 -10 bis +10 10
F00E Wire retract SINT16 0 bis +10 10
Reserved
Boolean Siehe Wer-
tion
tebereich
Command
value
selection
auf Seite
26
100
327,67
m/min
24
Page 25

HEX
Adres
s Signal Type
Range /
Unit
F00F Welding speed UINT16 0 bis 65535
(0 bis
6553,5
10
m/min)
F010 Penetration stabilizer SINT16 0 bis +10 10
F011 Arc length stabilizer UINT16 0 bis +10 10
F012 Reserved
F013 Reserved
F014 Reserved
F015 Reserved
F016 Reserved
F017 Reserved
F018 Reserved
F019 Reserved
Factor
DE
Wertebereich
Processline
selection
F01A Wire forward / backward length UINT16 OFF / 1 bis
65535 mm
F01B Wire sense edge detection UINT16 OFF / 0,5
bis 20,0
mm
F01C Reserved
F01D Seam number UINT16 0 bis 65535 1
Bit 1 Bit 0 Beschreibung
0 0 Prozesslinie 1 (default)
0 1 Prozesslinie 2
1 0 Prozesslinie 3
1 1 Reserviert
Wertebereich Prozesslinien-Auswahl
1
10
Wertebereich
TWIN mode
Bit 1 Bit 0 Beschreibung
0 0 TWIN Single mode
0 1 TWIN Lead mode
1 0 TWIN Trail mode
1 1 Reserve
Wertebereich TWIN-Betriebsart
25
Page 26

Wertebereich
Documentation
mode
Bit 0 Beschreibung
0 Nahtnummer von Stromquelle (intern)
1 Nahtnummer von Roboter
Wertebereich Dokumentationsmodus
Wertebereich
Working mode
Wertebereich
Command value
selection
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 Parameteranwahl intern
0 0 0 0 1 Kennlinien Betrieb Sonder 2-Takt
0 0 0 1 0 Job Betrieb
0 1 0 0 0 Kennlinien Betrieb 2-Takt
Wertebereich Betriebsart
Bit14Beschreibung
0 Sollwert Drahtvorschub
1 Sollwert Schweißstrom
Wertebereich Sollwert
26
Page 27

Ausgangssignale von der Stromquelle zum Roboter
gültig ab Firmware V2.3.0
HEX
Adres
s Signal Type
F100 Status Flag Group 1
Bit 0 - 15 Reserved
Range /
Unit
DE
Factor
F101
Status Flag Group 2
Bit 0 Heartbeat Powersour-ceBoolean 1
Hz
Bit 1 Power source ready Boolean
Bit 2 Arc stable Boolean
Bit 3 Current flow Boolean
Bit 4 Main current signal Boolean
Bit 5 Torch collision protec-
tion
Bit 6 Reserved
Bit 7 Reserved
Bit 8 Touched Boolean
Bit 9 Torchbody connected Boolean
Bit 10 Command value out of
range
Bit 11 Correction out of range Boolean
Bit 12 Process active Boolean
Bit 13 RobotMotionRelease Boolean
Boolean
Boolean
F102
Bit 14 Wire stick workpiece Boolean
Bit 15 Reserved
Status Flag Group 3
Bit 0 Welding Mode Bit 0 Boolean Siehe Wer-
Bit 1 Welding Mode Bit 1 Boolean
Bit 2 Welding Mode Bit 2 Boolean
Bit 3 Welding Mode Bit 3 Boolean
Bit 4 Welding Mode Bit 4 Boolean
Bit 5 - 7 Reserved
Bit 8 Parameter selection in-
ternally
Bit 9 Characteristic number
valid
Bit 10 13
Bit 14 Process image Bit 0 Boolean
Bit 15 Process image Bit 1 Boolean
Reserved
Boolean
Boolean
tebereich
Schweißver
fahren und
Prozess-
Image auf
Seite 30
27
Page 28

HEX
Adres
s Signal Type
F103 Status Flag Group 4
Bit 0 Penetration stabilizier Boolean
Bit 1 Arclength stabilizier Boolean
Bit 2 - 15 Reserved
F104 Status Flag Group 5
Range /
Unit
Factor
Bit 0 Sensor status 1 High Boolean Siehe Zu-
Bit 1 Sensor status 2 High Boolean
Bit 2 Sensor status 3 High Boolean
Bit 3 - 10 Reserved
Bit 11 Safety status Bit 0 Boolean Siehe Wer-
Bit 12 Safety status Bit 1 Boolean
Bit 13 Reserved
Bit 14 Notification Boolean
Bit 15 System not ready Boolean
F105 Status Flag Group 6
Bit 0 Limit Signal Boolean
Bit 1 - 7 Reserved
Bit 8 Reserved
Bit 9 TWIN synchronization
active
Boolean
ordnung
Sensorstatus 1-3 auf
Seite 30
tebereich
Safety sta-
tus auf Sei-
te 31
Bit 10 Main supply status Boolean
Bits 11 -13Reserved
Bit 14 Warning Boolean
Bit 15 Reserved
F106 Status Flag Group 7
Bit 0 - 15 Reserved Boolean
28
Page 29

HEX
Adres
s Signal Type
F107 Status Flag Group 8
Range /
Unit
Factor
DE
Bit 0 ExtOutput1 <=
OPT_Input1
Bit 1 ExtOutput2 <=
OPT_Input2
Bit 2 ExtOutput3 <=
OPT_Input3
Bit 3 ExtOutput4 <=
OPT_Input4
Bit 4 ExtOutput5 <=
OPT_Input5
Bit 5 ExtOutput6 <=
OPT_Input6
Bit 6 ExtOutput7 <=
OPT_Input7
Bit 7 ExtOutput8 <=
OPT_Input8
Bit 8 - 15 Reserved Boolean
F108 Main error number UINT16 0 bis 65535
F109 Warning number UINT16 0 bis 65535 1
Boolean
Boolean
Boolean
Boolean
Boolean
Boolean
Boolean
Boolean
F10A Welding voltage actual value UINT16 0,0 bis
327,67 Volt
F10B Welding current actual value UINT16 0,0 bis
3276,7 Am-
pere
F10C Motor current actual value M1 SINT16 -327,68 bis
327,67 Am-
pere
F10D Motor current actual value M2 SINT16 -327,68 bis
327,67 Am-
pere
F10E Motor current actual value M3 SINT16 -327,68 bis
327,67 Am-
pere
F10F Reserved
F110 Wire speed actual value SINT16 -327,68 bis
327,67
m/min
F111 Seam tracking actual value UINT16 0 bis
6,5535
F112 Real energy actual value UINT16 0 bis
6553,5 Kilo
Joule
100
100
100
100
100
10000
10
10
F113 Wire position SINT16 -327,68 bis
327,67 mm
100
29
Page 30

HEX
Adres
s Signal Type
Range /
Unit
F114 Reserved
F115 Reserved
F116 Reserved
F117 Reserved
F118 Reserved
F119 Reserved
F11A Reserved
F11B Reserved
F11C Reserved
F11D Reserved
Factor
Wertebereich
Schweißverfahren und ProzessImage
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 Betriebsanwahl intern
0 0 0 0 1 MIG/MAG Puls-Synergic
0 0 0 1 0 MIG/MAG Standard-Synergic
0 0 0 1 1 MIG/MAG PMC
0 0 1 0 0 MIG/MAG LSC
0 0 1 0 1 MIG/MAG Standard-Manuell
0 0 1 1 0 Elektrode
0 0 1 1 1 WIG
0 1 0 0 0 CMT
Wertebereich Schweißverfahren
Bit 15 Bit 14 Bit
Beschreibung
0-13
0 0 - Standard-Image (Weldcom V2.0)
1 0 - Retrofit-Image (Weldcom TPS-Serie)
Wertebereich Prozess-Image
Zuordnung Sensorstatus 1-3
30
Bit 2 Bit 1 Bit 0 Beschreibung
0 0 1 OPT/i WF R Drahtende
0 1 0 OPT/i WF R DE Drahtfass
1 0 0 OPT/i WF R DE Ringsensor
Page 31

Wertebereich
Bit 1 Bit 0 Beschreibung
Safety status
0 0 Reserve
0 1 Halt
1 0 Stopp
1 1 Nicht eingebaut / aktiv
TAG-Tabelle
Zum Lesen der nachfolgenden TAGs, die Modus-Funktion 03dec (03hex) verwenden - siehe Ab-
-
schnitt 03
Zum Bearbeiten der nachfolgenden TAGs, die Modus-Funktion 06dec (06hex) verwenden - sie-
-
he Abschnitt 06
dec
(03
) Read Holding Register ab Seite 42
hex
dec
(06
) Write Single Register ab Seite 43
hex
HEX
Adresse Beschreibung Lesen / Schreiben Einheit Typ Schrittgröße
DE
E064 Gas preflow [Gpr] Lesen & Schreiben s Word 0,1
E065 Gas postflow [Gpo] Lesen & Schreiben s Word 0,1
E098 Error number Nur lesen Word 1
E062 Min. feeder value Nur lesen m/min Word 0,1
E063 Max. feeder value Nur lesen m/min Word 0,1
E0A3 Inching speed [Fdi] Lesen & Schreiben m/min Word 0,1
E032 SynchroPulse DeltaWireFeed Lesen & Schreiben m/min Word
E031 SynchroPulse Frequency Lesen & Schreiben Hz Word 0,1
E033 SynchroPulse DutyCycle Lesen & Schreiben % Word 1
E034 SynchroPulse
Lesen & Schreiben Word 0,1
ArcLength Correction High
E035 SynchroPulse
Lesen & Schreiben Word 0,1
ArcLength Correction Low
E06A Starting current [I-S] Lesen & Schreiben % Word 1
E06B Slope 1 Lesen & Schreiben s Word 0,1
E06C Slope 2 Lesen & Schreiben s Word 0,1
E06D End current [I-E] Lesen & Schreiben % Word 1
E056 Starting Current Time [t-S] Lesen & Schreiben s Word 0,1
OFF=12e34
E057 End Current Time [t-e] Lesen & Schreiben s Word 0,1
OFF=12e34
E02E SFI HotStart Lesen & Schreiben s Word 0,01
31
Page 32

HEX
Adresse Beschreibung Lesen / Schreiben Einheit Typ Schrittgröße
E06F Language Lesen & Schreiben Con-
Name: Language
Constant: English (8e34)
Constant: German (9e34)
Constant: Chinese (10e34)
Constant: Spanish (23e34)
Constant: French (24e34)
Constant: Czech (25e34)
Constant: Hungarian (26e34)
Constant: Italian (27e34)
Constant: Norwegian (28e34)
Constant: Polish (29e34)
Constant: Portuguese (30e34)
Constant: Slovak (31e34)
Constant: Turkish (32e34)
Constant: Russian (33e34)
Constant: Swedish (34e34)
stant
Float
Constant: Estonian (35e34)
Constant: Finnish (36e34)
Constant: Lithuanian (39e34)
Constant: Latvian (40e34)
Constant: Dutch (41e34)
Constant: Slovenian (42e34)
Constant: Romanian (43e34)
Constant: Croatian (44e34)
Constant: Japanese (58e34)
Constant: Ukrainian (59e34)
Constant: Korean (61e34)
Constant: Icelandic (66e34)
Constant: Vietnamese (67e34)
Constant: Thai (70e34)
Constant: Indonesian (71e34)
Constant: Serbian (75e34)
Constant: Hindi (76e34)
Constant: Tamil (130e34)
Constant: Danish (151e34)
Constant: Bulgarian (156e34)
E0A6 Hourmeter Current flow Nur lesen h Float 0,1
E0A7 Hourmeter Power on Nur lesen h Float 0,1
32
Page 33

HEX
Adresse Beschreibung Lesen / Schreiben Einheit Typ Schrittgröße
E0AA Power value Nur lesen kW Float 0,1
E0AB Real energy value Nur lesen kJ Float 0,1
E0BB Coolertemperature Nur lesen C Float 0,1
E0BC Coolerflow Nur lesen l/min Float 0,01
DE
33
Page 34

Ein- und Ausgangssignale Retrofit-Image
Eingangssignale vom Roboter zur Stromquelle
gültig ab Firmware V1.9.0
HEX
Adresse Signal Typ Bereich / Einheit
F000
F001
Control Flag Group 1
Bit 0 to 7 Process active timeout Byte [ms] 10
Bit 8 to 15 Reserved
Control Flag Group 2
Bit 0 Welding start Boolean
Bit 1 Robot ready Boolean
Bit 2 Source error reset Boolean
Bit 3 Gas test Boolean
Bit 4 Wire inching Boolean
Bit 5 Wire retract Boolean
Bit 6 Torch blow out Boolean
Bit 7 Welding simulation Boolean
Bit 8 Touch sensing Boolean
Bit 9 Reserved
Bit 10 SFI on Boolean
Faktor
Bit 11 Synchro pulse on Boolean
Bit 12 to
13
Bit 14 Power full range Boolean
Bit 15 Reserved
F002 Control Flag Group 3
Bit 0 to 15 Reserved
F003 Control Flag Group 4
Bit 0 to 15 Reserved
F004 Control Flag Group 5
Bit 0 to 15 Reserved
F005 Control Flag Group 6
Bit 0 to 15 Reserved
F006 Control Flag Group 7
Bit 0 to 15 Reserved
F007 Control Flag Group 8
Bit 0 to 15 Reserved
Reserved
34
Page 35

HEX
Adresse Signal Typ Bereich / Einheit
F008
Operating mode
Faktor
DE
F009 Job number Byte 0 bis 255
F00A Program number Byte 0 bis 127
F00B Power Word 0 bis 65535
F00C Arc length correction Word 0 bis 65535
F00D Pulse-/dynamic correction Byte 0 bis 255
F00E Reserved
F00F Reserved
F010 Reserved
F011 Reserved
F012 Reserved
Bit 0 Operating mode 0 Boolean
Bit 1 Operating mode 1 Boolean
Bit 2 Operating mode 2 Boolean
Bit 3 Operating mode 3 Boolean
Bit 4-15 Reserved Boolean
Siehe Tabelle
Wertebereich
Betriebsart auf
Seite 35
(0 bis 100%)
(-10 bis +10%)
(-5 bis +5%)
F013 Reserved
F014 Reserved
F015 Reserved
F016 Reserved
F017 Reserved
F018 Reserved
F019 Reserved
F01A Reserved
F01B Reserved
F01C Reserved
F01D Reserved
F01E Reserved
Wertebereich
Betriebsart
Bit
4-15
Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
- 0 0 0 0 MIG Standard
- 0 0 0 1 MIG Puls
- 0 0 1 0 Job Betrieb
- 0 0 1 1
Parameteranwahl intern/Sonder 2Takt
35
Page 36

Bit
4-15
- 0 1 0 0 Synergic Betrieb/Sonder 2-Takt
- 0 1 0 1 Synergic Betrieb/Sonder 2-Takt
- 0 1 1 0 MIG Standard manuell
- 0 1 1 1 Synergic Betrieb/Sonder 2-Takt
- 1 0 0 0 MIG LSC
- 1 0 0 1 MIG PMC
Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
36
Page 37

Ausgangssignale von der Stromquelle zum Roboter
gültig ab Firmware V1.9.0
HEX
Adres
s Signal Type
F100 Status Flag Group 1
Range /
Unit
DE
Factor
F101
Bit 0 to
15
Status Flag Group 2
Bit 0 Communication ready Boolean
Bit 1 Power source ready Boolean
Bit 2 Arc stable Boolean
Bit 3 Process active Boolean
Bit 4 Main current signal Boolean
Bit 5 Torch collision protection Boolean
Bit 6 Wire stick control Boolean
Bit 7 Wire available Boolean
Bit 8 Short circuit timeout Boolean
Bit 9 Power out of Range Boolean
Bit 10 to11- Boolean
Bit 12 Limit signal High Boolean
Bit 13 to15- Boolean
Reserved Boolean
F102 Status Flag Group 3
Bit 0 to
13
Bit 14 Process image Bit 0 Boolean
Bit 15 Process image Bit 1 Boolean
F103 Status Flag Group 4
Bit 0 to
15
F104 Status Flag Group 5
Bit 0 to
15
F105 Status Flag Group 6
Bit 0 to
15
F106 Status Flag Group 7
Bit 0 to
15
Reserved
Reserved
Reserved
Reserved
Reserved
37
Page 38

HEX
Adres
s Signal Type
Range /
Unit
F107 Status Flag Group 8
Factor
Bit 0 to
Reserved
15
F108 Main error number Word
F109 Reserved
F10A Welding voltage actual value Word 0 bis 65535
(0 bis 100
V)
F10B Welding current actual value Word 0 bis 65535
(0 bis 1000
A)
F10C Motor current actual value Byte 0 bis 255
(0 to 5 A)
F10D Reserved
F10E Reserved
F10F Reserved
F110 Wire speed actual value Word 0 bis vD-
100
max
F111 Reserved
F112 Reserved
TAG-Tabelle
Zum Lesen der nachfolgenden TAGs, die Modus-Funktion 03dec (03hex) verwenden - siehe Ab-
-
schnitt 03
Zum Bearbeiten der nachfolgenden TAGs, die Modus-Funktion 06dec (06hex) oder 16
-
(10
) verwenden - siehe Abschnitt 06
hex
schnitt 16
dec
dec
(03
(10
) Read Holding Register ab Seite 42
hex
(06
dec
) Write Multiple Register ab Seite 43
hex
) Write Single Register ab Seite 43 / Ab-
hex
dec
HEX
Adresse Beschreibung Lesen / Schreiben Einheit Typ Schrittgröße
E011 Gas preflow [Gpr] Lesen / Schreiben s Word 0,001
E012 Gas postflow [Gpo] Lesen / Schreiben s Word 0,001
E000 Error number Nur lesen Word 1
E072 Min. feeder value Nur lesen m/min Word 0,01
E073 Max. feeder value Nur lesen m/min Word 0,01
E013 Inching speed [Fdi] Lesen / Schreiben m/min Word 0,01
E015 Power offset [dFd] Lesen / Schreiben m/min Word 0,01
E016 SynchroPulse Frequency Lesen / Schreiben Hz Word 0,1
38
Page 39

HEX
Adresse Beschreibung Lesen / Schreiben Einheit Typ Schrittgröße
E01D Starting current [I-S] Lesen / Schreiben % Word 0,1
E01F Slope 1 + Slope 2 Lesen / Schreiben s Word 0,001
E020 End current [I-E] Lesen / Schreiben % Word 0,1
E01E Starting Current Time [t-S] Lesen / Schreiben s Word OFF = 0.0
E021 End Current Time [t-e] Lesen / Schreiben s Word
E007 Arc length correction 2 (Al2) Lesen / Schreiben % Word 0,1
and 0,1
DE
39
Page 40

Modbus - Allgemeine Informationen
Protokollbeschreibung
Die MODBUS-ADU wird vom Client aufgebaut, der die MODBUS-Transaktion initiiert. Über die Funktion erfährt der Server, welche Aktion auszuführen ist. Das
MODBUS-Anwendungsprotokoll legt das Format der von einem Client initiierten
Anforderung fest.
Das Funktionscode-Feld einer MODBUS-Dateneinheit ist auf einem Byte codiert.
Gültige Codes liegen im Dezimalbereich von 1... 255 (128-255 sind für Ausnahmeantworten reserviert). Wenn das Servergerät eine Nachricht von einem Client
erhält, gibt das Funktionscode-Feld dem Server an, welche Aktion auszuführen
ist.
Wenn mehrere Aktionen auszuführen sind, werden einige Funktionscodes um
Sub‑Funktionscodes ergänzt. Im Datenfeld von Nachrichten, die von einem Client an Servergeräte gesendet werden, sind zusätzliche Informationen enthalten,
anhand derer der Server die im Funktionscode definierte Aktion ausführt. Das
können Elemente wie diskrete Adressen, Register-Adressen, die zu handhabende
Menge oder die Anzahl der tatsächlichen Datenbytes im Feld sein.
Bei bestimmten Anforderungsarten kann kein Datenfeld (Länge Null) vorhanden
sein. In diesem Fall benötigt der Server keine weiteren Informationen, da der
Funktionscode allein die Aktion spezifiziert.
Wenn in einer ordnungsgemäß empfangenen MODBUS ADU in Verbindung mit
der angeforderten MODBUS-Funktion kein Fehler auftritt, enthält das Datenfeld
einer Antwort von einem Server an einen Client die angeforderten Daten. Wenn
in Verbindung mit der angeforderten MODBUS-Funktion ein Fehler auftritt,
enthält das Feld einen Ausnahmecode, anhand dessen die Serveranwendung die
nächste auszuführende Aktion bestimmen kann.
So kann beispielsweise ein Client die Status ON/OFF einer Gruppe diskreter Einoder Ausgänge lesen oder er kann die Dateninhalte einer Registergruppe lesen/
schreiben.
In der Antwort an den Client gibt der Server im Funktionscode-Feld entweder eine normale (fehlerfreie) Antwort an oder er teilt mit, dass ein Fehler vorliegt (eine solche Antwort wird als Ausnahmeantwort bezeichnet). Bei einer normalen
Antwort wiederholt der Server einfach den ursprünglichen Funktionscode.
Datencodierung MODBUS verwendet für Adressen und Datenelemente eine Big-Endian-Darstel-
lung. Das bedeutet, wenn eine numerische Anzahl übertragen wird, die größer als
ein einzelnes Byte ist, wird das bedeutendste Byte zuerst gesendet.
Registergröße Wert
16 Bit 1234
hex
das erste gesendete Byte ist 12
, dann 34
hex
hex
40
Page 41

Application Data
Unit (ADU)
In diesem Abschnitt wird beschrieben, wie eine MODBUS-Anforderung oder Antwort bei der Übertragung in einem MODBUS TCP-Netzwerk gekapselt wird.
MPAP Header Funktionscode Daten
Beschreibung MPAP-Header:
Transaction Identifier
Dieser wird für die Transaktionszuordnung verwendet. Der MODBUS-Server
kopiert den Transaction Identifier der Anforderung in die Antwort.
Länge: 2 Byte
Beschreibung: Identifizierung einer MODBUS-Anforderungs-/
Antworttransaktion
Client: Vom Client initialisiert
Server: Vom Server aus der empfangenen Anforderung zurück-
kopiert
Protocol Identifier
Dieser wird für Multiplexing innerhalb des Systems verwendet. Das MODBUSProtokoll wird durch den Wert 0 identifiziert.
Länge: 2 Byte
Beschreibung: 0 = Modbus-Protokoll
DE
Client: Vom Client initialisiert
Server: Vom Server aus der empfangenen Anforderung zurück-
kopiert
Length
In diesem Feld wird die Byteanzahl des folgenden Felds angegeben, einschließlich Unit Identifier, Funktionscode und Datenfeld.
Länge: 2 Byte
Beschreibung: Anzahl der folgenden Bytes
Client: Vom Client initialisiert
Server: -
Unit Identifier
Dieses Feld wird für Routing-Zwecke innerhalb des Systems verwendet. Es wird
in der Regel für die Kommunikation mit einem seriell verbundenen MODBUSoder MODBUS+-Slave über ein Gateway zwischen einem Ethernet-Netzwerk
und einer seriellen MODBUS-Leitung verwendet. Der Wert im Feld wird vom
MODBUS-Client in der Anforderung eingestellt und muss genau so in der Antwort des Servers zurückgegeben werden.
Länge: 1 Byte
Beschreibung: Identifizierung eines Remote Slave, der über eine seri-
elle Leitung oder über andere Busse verbunden ist.
Client: Vom Client initialisiert
Server: Vom Server aus der empfangenen Anforderung zurück-
kopiert
Sämtliche MODBUS/TCP ADU werden über TCP am registrierten Port 502 gesendet.
41
Page 42

Modbus - Funktionen
03
(03
dec
Read Holding
Register
hex
)
Mit diesem Code wird der Inhalt eines fortlaufenden Blocks von Holding Registern in einem Remote-Gerät gelesen. Die Anforderungs-PDU bestimmt die Startregister-Adresse und die Anzahl der Register.
In der PDU werden Register beginnend mit Null adressiert. So werden Register,
die mit 1-16 nummeriert sind, mit 0-15 adressiert.
Die Registerdaten in der Antwort-Nachricht sind als zwei Byte pro Register gepackt, wobei der Binärinhalt in jedem Byte genau abgestimmt ist. In den einzelnen Registern enthält das erste Byte die höherwertigen Bits und das zweite Byte
die niedrigerwertigen Bits.
Anforderung
Funktionscode 1 Byte 03
Startadresse 2 Byte 0000
Anzahl der Register 2 Byte 1 bis 125 (7D
hex
bis FFFF
hex
hex
hex
)
Antwort
Funktionscode 1 Byte 03
hex
Anzahl Byte 2 Byte 2 x N*
Registerwert N* x 2 Bytes -
N* = Anzahl Register
Fehler
Fehlercode 1 Byte 83
hex
Ausnahmecode 1 Byte 01 oder 02 oder 03 oder 04
Beispiel
Beispiel einer Leseanforderung für Register F009 (Jobnummer).
Anforderung Antwort
Feldname Hex Feldname Hex
42
Transaction Identifier Hi 00 Transaction Identifier Hi 00
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Protocol Identifier Hi 00 Protocol Identifier Hi 00
Protocol Identifier Lo 00 Protocol Identifier Lo 00
Length Hi 00 Length Hi 00
Length Lo 06 Length Lo 05
Unit Identifier 00 Unit Identifier 00
Function code 03 Function code 03
Starting Address Hi F0 Byte Count 02
Starting Address Lo F9 Register value Hi (108) 02
No. of Registers Hi 00 Register value Lo (108) 37
Page 43

06
dec
(06
hex
)
Write Single Register
Beispiel
Beispiel einer Leseanforderung für Register F009 (Jobnummer).
Anforderung Antwort
Feldname Hex Feldname Hex
No. of Registers Lo 01
Der Inhalt von Register F009 (Jobnummer) wird in Form der Zwei-Byte-Werte
237
oder 567
hex
angezeigt.
dec
Dieser Funktionscode wird zum Schreiben eines Single Holding Register in einem
Remote-Gerät verwendet. Die Anforderungs-PDU gibt die Adresse des zu schreibenden Registers an. Register werden mit Null beginnend adressiert. So wird das
Register, das mit 1 nummeriert ist, mit 0 adressiert.
Die normale Antwort ist ein Echo der Anforderung und wird nach Schreiben des
Registerinhalts zurückgegeben.
Anforderung
DE
Funktionscode 1 Byte 06
Registeradresse 2 Byte 0000
Registerwert 2 Byte 0000
hex
hex
hex
bis FFFF
hex
oder FFFF
hex
Antwort
Funktionscode 1 Byte 06
Registeradresse 2 Byte 0000
Registerwert 2 Byte 0000
hex
hex
hex
bis FFFF
hex
oder FFFF
hex
Fehler
Fehlercode 1 Byte 86
hex
Ausnahmecode 1 Byte 01 oder 02 oder 03 oder 04
Beispiel
Beispiel einer Anforderung zum Schreiben des Werts 237
hex
(567
) in Regis-
dec
ter F009 (Jobnummer).
Anforderung Antwort
Feldname Hex Feldname Hex
Transaction Identifier Hi 00 Transaction Identifier Hi 00
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Protocol Identifier Hi 00 Protocol Identifier Hi 00
Protocol Identifier Lo 00 Protocol Identifier Lo 00
Length Hi 00 Length Hi 00
Length Lo 06 Length Lo 05
Unit Identifier 00 Unit Identifier 00
Function code 03 Function code 03
Register Address Hi F0 Register Address Hi 02
43
Page 44

Beispiel
Beispiel einer Anforderung zum Schreiben des Werts 237
hex
(567
) in Regis-
dec
ter F009 (Jobnummer).
Anforderung Antwort
Feldname Hex Feldname Hex
Register Address Lo F9 Register Address Lo 02
Register Value Hi 00 Register Value Hi 37
Register Value Lo 01 Register Value Lo
44
Page 45

16
dec
(10
hex
)
Write Multiple
Register
Dieser Funktionscode wird zum Schreiben eines Blocks von fortlaufenden Registern in einem Remote-Gerät verwendet. Die angeforderten geschriebenen Werte
werden im Anforderungsdatenfeld angegeben. Die Daten werden in zwei Byte pro
Register gepackt. Die normale Antwort gibt den Funktionscode, die Startadresse
und die Anzahl der geschriebenen Register zurück.
Anforderung
DE
Funktionscode 1 Byte 10
Startadresse 2 Byte 0000
Anzahl Register 2 Byte 0001
hex
hex
hex
bis FFFF
oder 0078
hex
hex
Anzahl Byte 1 Byte 2 x N*
Registerwerte N* x 2 Bytes Wert
N* = Anzahl der zu schreibenden Register
Antwort
Funktionscode 1 Byte 10
Startadresse 2 Byte 0000
Anzahl der Register 2 Byte 1 bis 123 (7B
hex
bis FFFF
hex
hex
hex
)
Fehler
Fehlercode 1 Byte 90
hex
Ausnahmecode 1 Byte 01 oder 02 oder 03 oder 04
Beispiel
Beispiel einer Anforderung zum Schreiben von zwei Registern (F00B
F00C
hex
).
hex
-
Anforderung Antwort
Feldname Hex Feldname Hex
Transaction Identifier Hi 00 Transaction Identifier Hi 00
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Protocol Identifier Hi 00 Protocol Identifier Hi 00
Protocol Identifier Lo 00 Protocol Identifier Lo 00
Length Hi 00 Length Hi 00
Length Lo 11 Length Lo 11
Unit Identifier 00 Unit Identifier 00
Function code 10 Function code 10
Starting Address Hi F0 Starting Address Hi F0
Starting Address Lo 0B Starting Address Lo 0B
Quantity of Registers Hi 00 Quantity of Registers Hi 00
Quantity of Registers Lo 02 Quantity of Registers Lo 02
Byte Count 04
Register Value Hi 04
45
Page 46

Beispiel
Beispiel einer Anforderung zum Schreiben von zwei Registern (F00B
F00C
hex
).
hex
-
Anforderung Antwort
Feldname Hex Feldname Hex
Register Value Lo CE
Register Value Hi FF
Register Value Lo C0
46
Page 47

23
dec
(17
hex
)
Read/Write Multiple Register
Dieser Funktionscode führt eine Kombination aus einer Lese- und einer Schreiboperation in einer MODBUS-Transaktion aus. Dabei wird zuerst die Schreib- und
dann die Leseoperation durchgeführt.
Holding Register werden mit Null beginnend adressiert. So werden die Holding
Register 1-16 in der PDU mit 0-15 adressiert.
Die Anforderungs-PDU gibt an:
die Startadresse und die Anzahl der zu lesenden Holding Register
-
die Startadresse, die Anzahl der Holding Register und die Daten für den
-
Schreibvorgang.
Im Feld mit der Anzahl der Bytes wird die Anzahl der Bytes angegeben, die im
Daten-schreiben-Feld folgen müssen.
Die normale Antwort enthält die Daten aus der Gruppe der gelesenen Register.
Im Feld mit der Anzahl der Bytes wird die Anzahl der Bytes angegeben, die im
Daten-lesen-Feld folgen müssen.
Anforderung
DE
Funktionscode 1 Byte 17
hex
Lese-Startadresse 2 Byte 0000
Anzahl Register zu
2 Byte 0001
lesen
Schreib-Startadres-se2 Byte 0000
Anzahl Register zu
2 Byte 0001
schreiben
Anzahl Byte schrei-
1 Byte 2 x N*
ben
Registerwerte
N* x 2 Bytes
schreiben
N* = Anzahl der zu schreibenden Register
Antwort
Funktionscode 1 Byte 17
hex
Anzahl Byte 1 Byte 2 x N*
Registerwerte
N* x 2 Bytes
schreiben
bis FFFF
hex
bis ca. 0076
hex
bis FFFF
hex
bis ca. 0076
hex
hex
hex
hex
hex
N* = Anzahl der zu lesenden Register
Fehler
Fehlercode 1 Byte 97
hex
Ausnahmecode 1 Byte 01 oder 02 oder 03 oder 04
47
Page 48

Beispiel
Beispiel einer Anforderung zum Lesen von 2 Registern und zum Schreiben von
2 Registern.
Anforderung Antwort
Feldname Hex Feldname Hex
Transaction Identifier Hi 00 Transaction Identifier Hi 00
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Transaction Identifier Hi 00 Transaction Identifier Hi 00
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Protocol Identifier Hi 00 Protocol Identifier Hi 00
Protocol Identifier Lo 00 Protocol Identifier Lo 00
Length Hi 00 Length Hi 00
Length Lo 11 Length Lo 7
Unit Identifier 00 Unit Identifier 00
Function code 17 Function code 17
Read Starting Address Hi F1 Byte Count 2
Read Starting Address Lo 0A Read Registers Value Hi 04
103
dec
(67
hex
Read Holding
Register Float
Quantity to Read Hi 00 Read Registers Value Lo 08
Quantity to Read Lo 2 Read Registers Value Hi 0A
Write Starting Address Hi F0 Read Registers Value Lo C8
Write Starting Address Lo 0B
Quantity to Write Hi 00
Quantity to Write Lo 04
Write Byte Count 2
Write Registers Value Hi 04
Write Registers Value Lo CE
Write Registers Value Hi FF
Write Registers Value Lo C0
)
Mit dieser Funktion wird der Inhalt eines fortlaufenden Blocks von Registern der
in diesem Dokument enthaltenen TAG-Tabellen gelesen. Das Format des Registers ist Float (32 Bit). Die Anforderungs-PDU bestimmt die Startregister-Adresse
und die Anzahl der Register.
In der PDU werden Register beginnend mit Null adressiert. So werden Register,
die mit 1-16 nummeriert sind, mit 0-15 adressiert.
48
Die Registerdaten in der Antwort-Nachricht sind als zwei Byte pro Register gepackt, wobei der Binärinhalt in jedem Byte genau abgestimmt ist. In den einzelnen Registern enthält das erste Byte die höherwertigen Bits und das zweite Byte
die niedrigerwertigen Bits.
Anforderung
Funktionscode 1 Byte xx
hex
Page 49

Anforderung
Startadresse 2 Byte xxxx
Anzahl der Register 2 Byte 1 bis 125 (7D
bis xxxx
hex
hex
hex
)
Antwort
Funktionscode 1 Byte 03
hex
Anzahl Byte 2 Byte 2 x N*
Registerwert N* x 2 Bytes -
N* = Anzahl Register
Fehler
Fehlercode 1 Byte 83
hex
Ausnahmecode 1 Byte 01 oder 02 oder 03 oder 04
Beispiel
Beispiel einer Leseanforderung für Register E064
(Gasvorströmung).
hex
Anforderung Antwort
Feldname Hex Feldname Hex
Transaction Identifier Hi 00 Transaction Identifier Hi 00
DE
104
dec
(68
hex
)
Write Single Register Float
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Protocol Identifier Hi 00 Protocol Identifier Hi 00
Protocol Identifier Lo 00 Protocol Identifier Lo 00
Length Hi 00 Length Hi 00
Length Lo 06 Length Lo 05
Unit Identifier 00 Unit Identifier 00
Function code 67 Function code 67
Starting Address Hi E0 Byte Count 02
Starting Address Lo 64 Register Value High Hi 3F
No. of Registers Hi 00 Register Value High Lo C0
No. of Registers Lo 01 Register Value Low Hi 00
Register Value Low Lo 00
Der Inhalt von Register E064
Werte 3FC00000 oder 1,5
(Gasvorströmung) wird in Form der Zwei-Byte-
hex
angezeigt.
dec
Mit dieser Funktion dient zum Bearbeiten von Registern der in diesem Dokument
enthaltenen TAG-Tabellen. Das Format des Registers ist Float (32 Bit). Die Anforderungs-PDU gibt die Adresse des zu schreibenden Registers an. Register werden mit Null beginnend adressiert. So wird das Register, das mit 1 nummeriert
ist, mit 0 adressiert.
Die normale Antwort ist ein Echo der Anforderung und wird nach Schreiben des
Registerinhalts zurückgegeben.
49
Page 50

Anforderung
Funktionscode 1 Byte 68
Registeradresse 2 Byte E000
Registerwert 2 Byte 0000
hex
bis Exxx
hex
oder FFFFFFFF
hex
hex
hex
Antwort
Funktionscode 1 Byte 68
Registeradresse 2 Byte E000
Registerwert 2 Byte 0000
hex
bis Exxx
hex
oder FFFFFFFF
hex
hex
hex
Fehler
Fehlercode 1 Byte E8
hex
Ausnahmecode 1 Byte 01 oder 02 oder 03
Beispiel
Beispiel einer Anforderung zum Schreiben des Werts 3FC00000
Register E064
(Gasvorströmung).
hex
hex
(1,5
dec
Anforderung Antwort
Feldname Hex Feldname Hex
) in
Transaction Identifier Hi 00 Transaction Identifier Hi 00
Transaction Identifier Lo 01 Transaction Identifier Lo 01
Protocol Identifier Hi 00 Protocol Identifier Hi 00
Protocol Identifier Lo 00 Protocol Identifier Lo 00
Length Hi 00 Length Hi 00
Length Lo 08 Length Lo 08
Unit Identifier 00 Unit Identifier 00
Function code 68 Function code 68
Register Address Hi E0 Register Address Hi E0
Register Address Lo 64 Register Address Lo 64
Register Value High Hi 3F Register Value Hi 45
Register Value High Lo C0 Register Value Lo 09
Register Value Low Hi 00 Register Value Hi 80
Register Value Low Lo 00 Register Value Lo 00
50
Page 51

DE
51
Page 52

Fronius International GmbH
Froniusstraße 1
4643 Pettenbach
Austria
contact@fronius.com
www.fronius.com
Under www.fronius.com/contact you will find the adresses
of all Fronius Sales & Service Partners and locations.
spareparts.fronius.com
SPAREPARTS
ONLINE
 Loading...
Loading...