

Page 1
Fronius prints on elemental chlorine free paper (ECF) sourced from certified sustainable forests (FSC).
/ Perfect Charging / Perfect Welding / Solar Energy
RI FB Inside/i
Bedienungsanleitung
DE
Roboter-Option
Operating instructions
Robot option
EN-US
Manual de instrucciones
Opción de robot
ES-MX
Instructions de service
FR
Option robot
Návod k obsluze
CS
Výbava robota
Návod na obsluhu
SK
Opcia robota
42,0410,1912 012-21012021
Page 2

Page 3
Inhaltsverzeichnis
Allgemeines 4
Gerätekonzept 4
Lieferumfang 4
Umgebungsbedingungen 5
Technische Daten 5
Sicherheit 5
Anschlüsse und Anzeigen am Roboter-Interface 6
Anschlüsse am Roboter-Interface 6
LEDs am Print des Roboter-Interfaces 7
LEDs zur Diagnose der Spannugsversorgung 8
LEDs zur Diagnose der Netzwerk-Verbindung 8
Roboter-Interface konfigurieren 9
Funktion des DIP-Schalters am Interface 9
Konfiguration der Prozessdaten-Breite 9
Knotenadresse einstellen mit DIP-Schalter(Beispiel) 10
Roboter-Interface einbauen 11
Sicherheit 11
Vorbereitung 11
Busmodul in das Roboter-Interface einbauen 14
Sicherheit 14
Busmodul einbauen 14
Roboter-Interface ausbauen 15
Sicherheit 15
Vorbereitung 15
Roboter-Interface ausbauen 16
Abschließende Tätigkeiten 16
Busmodul ausbauen 17
Busmodul ausbauen 17
DE
3
Page 4
Allgemeines
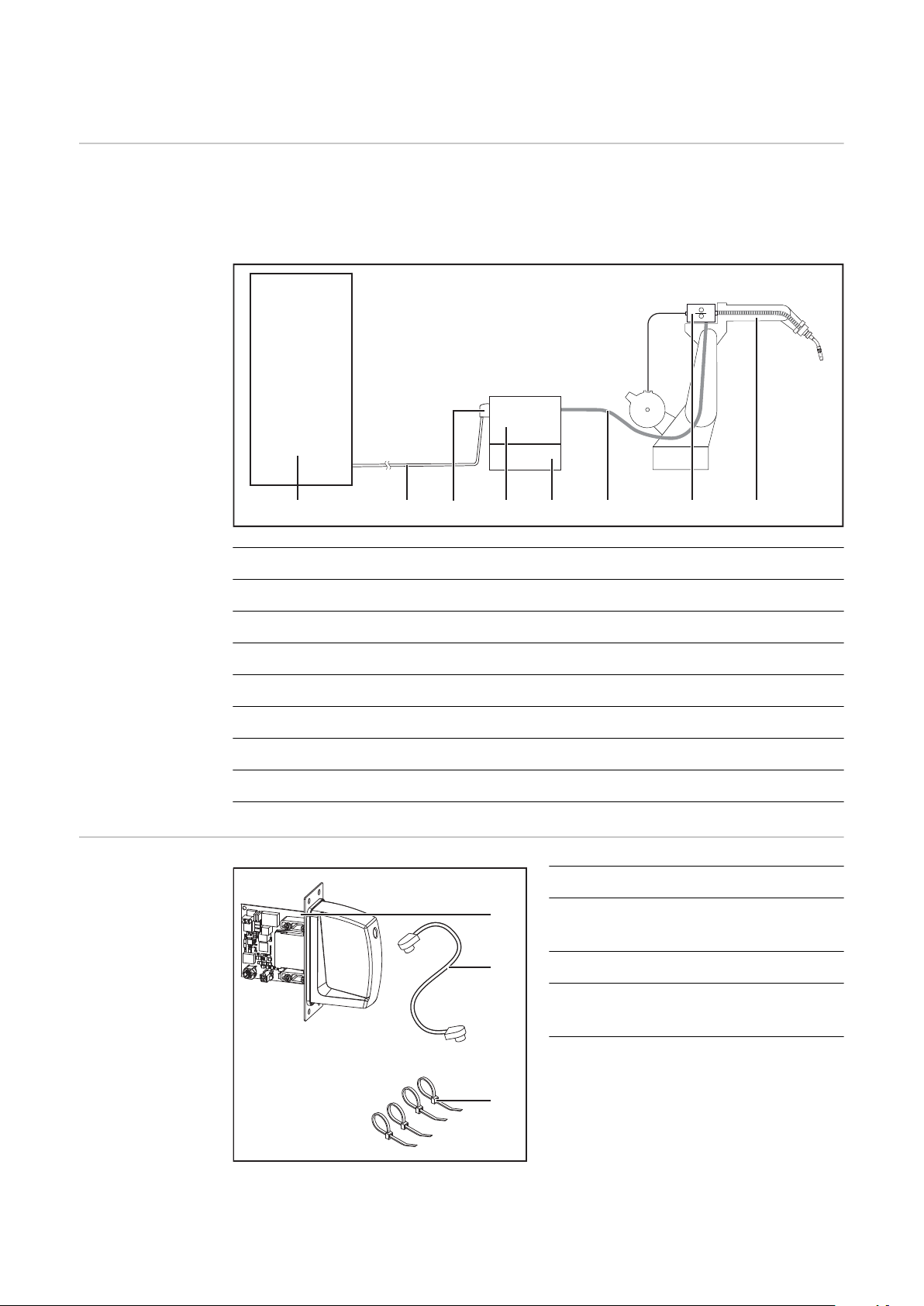
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
(1)
(2)
(3)
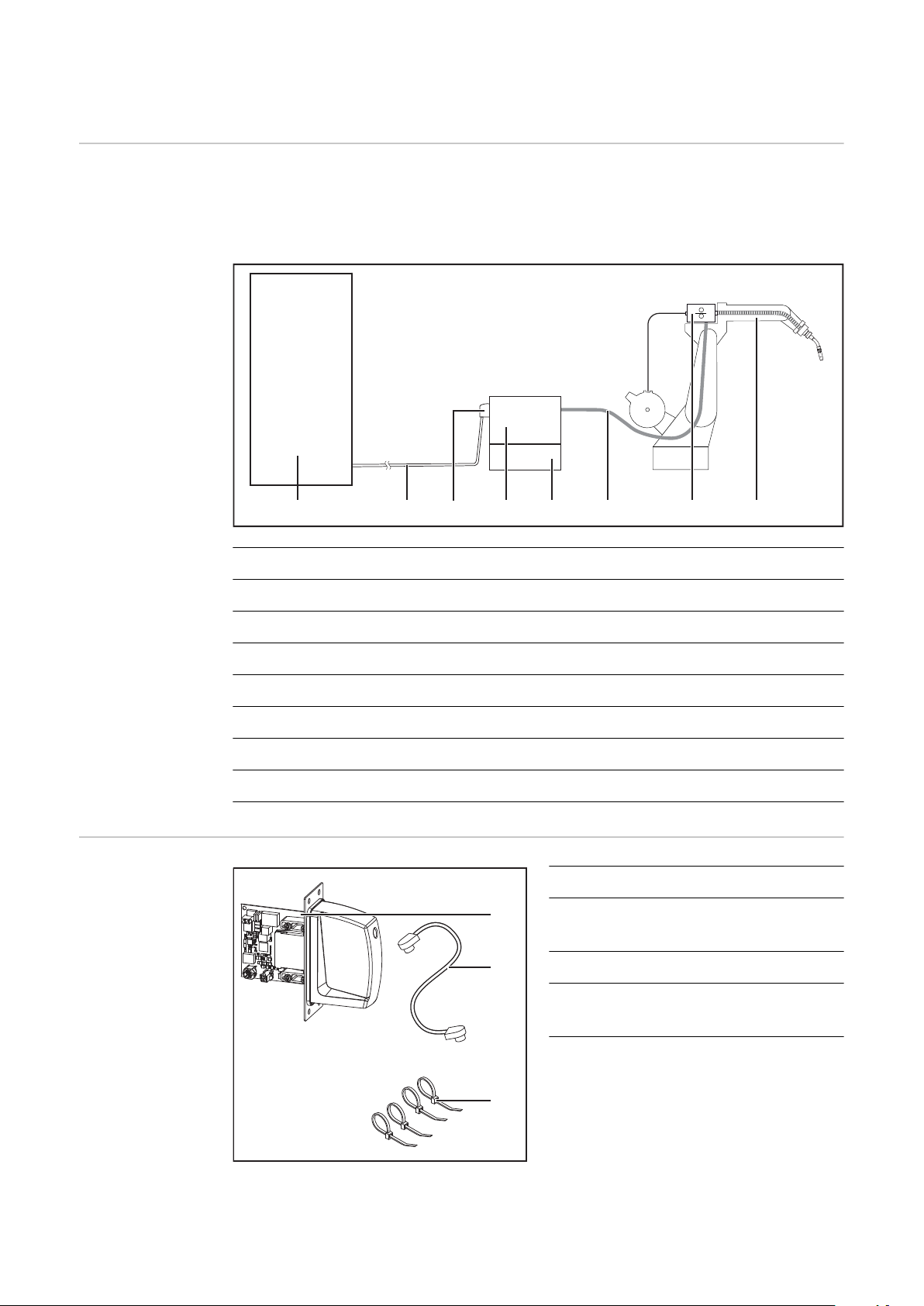
Gerätekonzept Das Roboter-Interface dient als Schnittstelle zwischen der Stromquelle und standardi-
sierten Busmodulen für verschiedenste Kommunikationsprotokolle.
Der Einbau des Roboter-Interface in die Stromquelle kann entweder bereits werkseitig
durch Fronius oder nachträglich durch entsprechend geschultes Fachpersonal erfolgen.
Lieferumfang
(1) Roboter-Steuerung
(2) Datenkabel SpeedNet
(3) Roboter-Interface
(4) Stromquelle
(5) Kühlgerät
(6) Verbindungs-Schlauchpaket
(7) Drahtvorschub
(8) Roboter
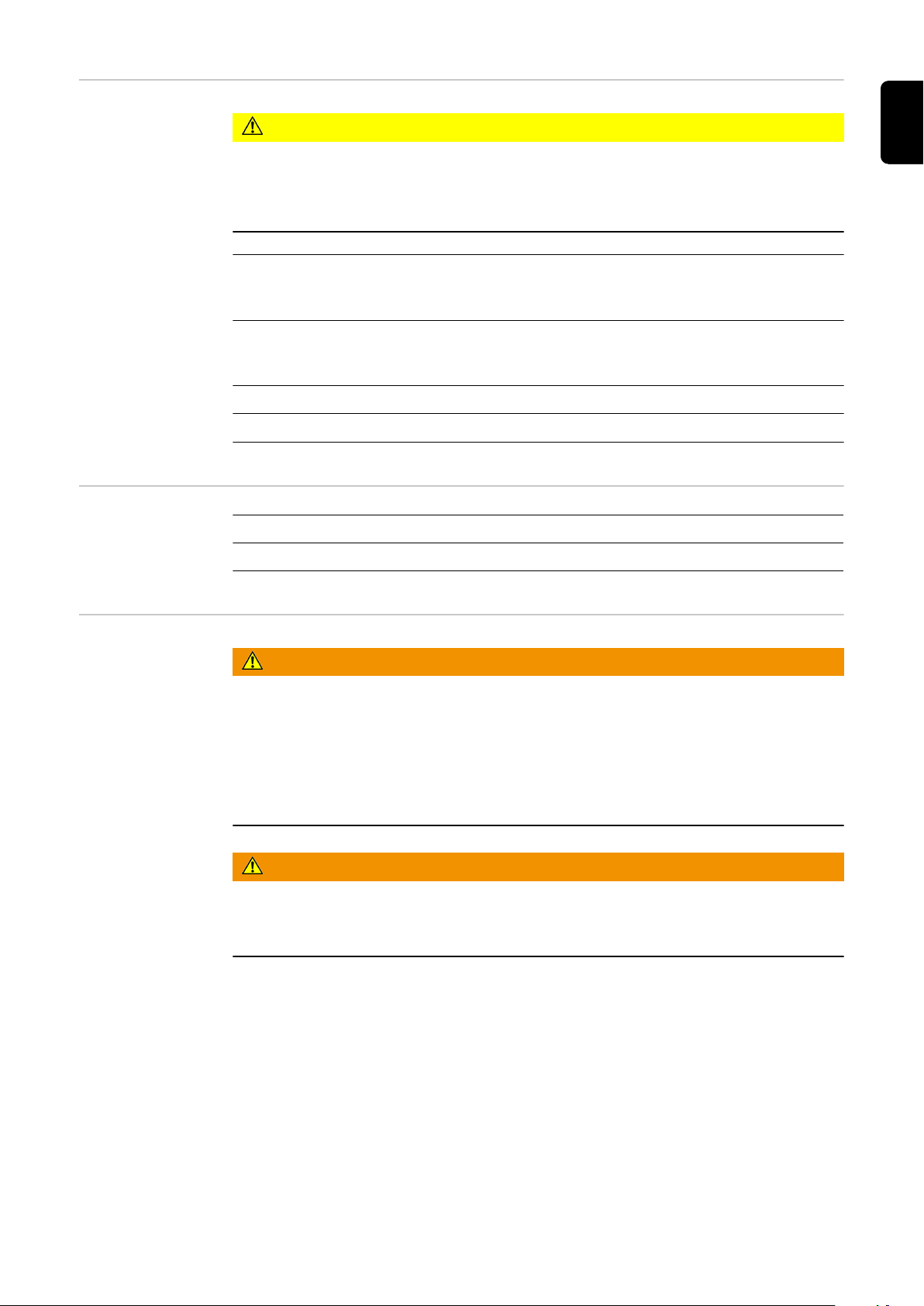
(1) RI FB Inside/i
(2) Datenkabel
4-polig
(3) 4 Kabelbinder
(4) Diese Bedienungsanleitung
(ohne Abbildung)
4
Page 5
Umgebungsbedingungen
VORSICHT!
Gefahr durch unzulässige Umgebungsbedingungen.
Schwere Geräteschäden können die Folge sein.
Das Gerät nur bei den nachfolgend angegebenen Umgebungsbedingungen lagern
▶
und betreiben.
Temperaturbereich der Umgebungsluft:
- beim Betrieb: -10 °C bis +40 °C (14 °F bis 104 °F)
- bei Transport und Lagerung: -20 °C bis +55 °C (-4 °F bis 131 °F)
Relative Luftfeuchtigkeit:
- bis 50 % bei 40 °C (104 °F)
- bis 90 % bei 20 °C (68 °F)
Umgebungsluft: frei von Staub, Säuren, korrosiven Gasen oder Substanzen, usw.
Höhenlage über dem Meeresspiegel: bis 2000 m (6500 ft).
DE
Technische Daten
Sicherheit
Spannungsversorgung intern (24 V)
Schutzart IP 23
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen nur von
▶
geschultem Fachpersonal ausgeführt werden.
Dieses Dokument lesen und verstehen.
▶
Sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere Sicher-
▶
heitsvorschriften lesen und verstehen.
WARNUNG!
Gefahr durch unplanmäßige Signalübertragung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Über das Interface keine sicherheitsrelevanten Signale übertragen.
▶
5
Page 6

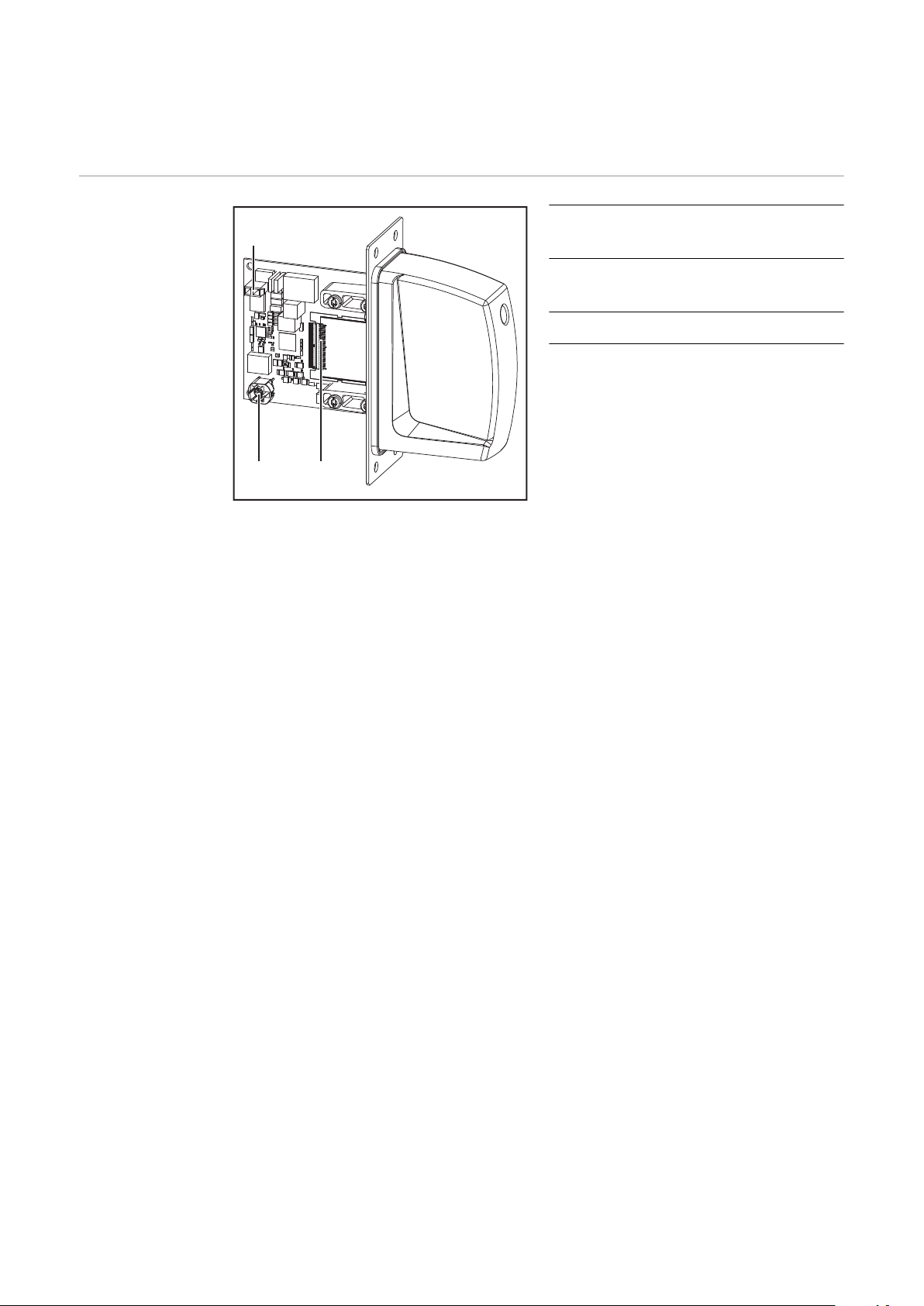
Anschlüsse und Anzeigen am Roboter-Interface
(2) (3)
(1)
Anschlüsse am
Roboter-Interface
(1) Anschluss Stromversorgung
2-polig
(2) Anschluss Datenkabel SpeedNet
4-polig
(3) Anschluss Busmodul
6
Page 7

LEDs am Print
(2)
(1)
(7)
(4)
(3)
(5)
(6)
(8)
des RoboterInterfaces
DE
(1) LED ETH1 grün Zur Diagnose der Netzwerk-Verbindung.
Datails siehe nachfolgender Abschnitt
(2) LED ETH2 orange
"LEDs zur Diagnose der Netzwerk-Verbindung“
(3) LED 3 grün
keine Funktion
(4) LED 4 grün
- blinkt mit 4 Hz = keine Verbindung
zum SpeedNet
(5) LED 5 grün
- blinkt mit 20 Hz = Verbindung zum
SpeedNet wird hergestellt
- blinkt mit 1 Hz = Verbindung zum
SpeedNet hergestellt
leuchtet bei internem Fehler.
(6) LED 6 rot
Fehlerbehebung: Roboter-Interface neu
starten. Bringt dies keine Besserung, den
Servicedienst verständigen.
(7) LED +3V3 grün Zur Diagnose der Spannungsversorgung.
Datails siehe nachfolgender Abschnitt
(8) LED +24V grün
"LEDs zur Diagnose der Spannugsversorgung“
7
Page 8

LEDs zur Diagnose der Spannugsversorgung
LED Anzeige Bedeutung Ursache
- Stromversorgung für das
Roboter-Interface nicht
hergestellt
- Stromversorgungs-Kabel
defekt
- 24 VDC Versorgungsspannung nicht vorhanden
- Netzteil am Roboter-Interface defekt
+24V
+3V3
Aus
Leuchtet
Aus
Keine Versorgungsspannung
für das Interface vorhanden
24 VDC Versorgungsspannung am Roboter-Interface
vorhanden
Keine Betriebsspannung am
Roboter-Interface vorhanden
LEDs zur Diagnose der Netzwerk-Verbindung
Leuchtet
LED Anzeige Bedeutung Ursache
Aus
ETH1
Leuchtet
blinkt Datenübertragung aktiv
Aus
ETH2
Leuchtet
3 VDC Betriebsspannung am
Roboter-Interface vorhanden
Keine Netzwerk-Verbindung
vorhanden
Netzwerk-Verbindung vorhanden
Übertragungsgeschwindigkeit
10 Mbit/s
Übertragungsgeschwindigkeit
100 Mbit/s
- Netzwerkverbindung für
das Interface nicht hergestellt
- Netzwerk-Kabel defekt
8
Page 9

Roboter-Interface konfigurieren
DE
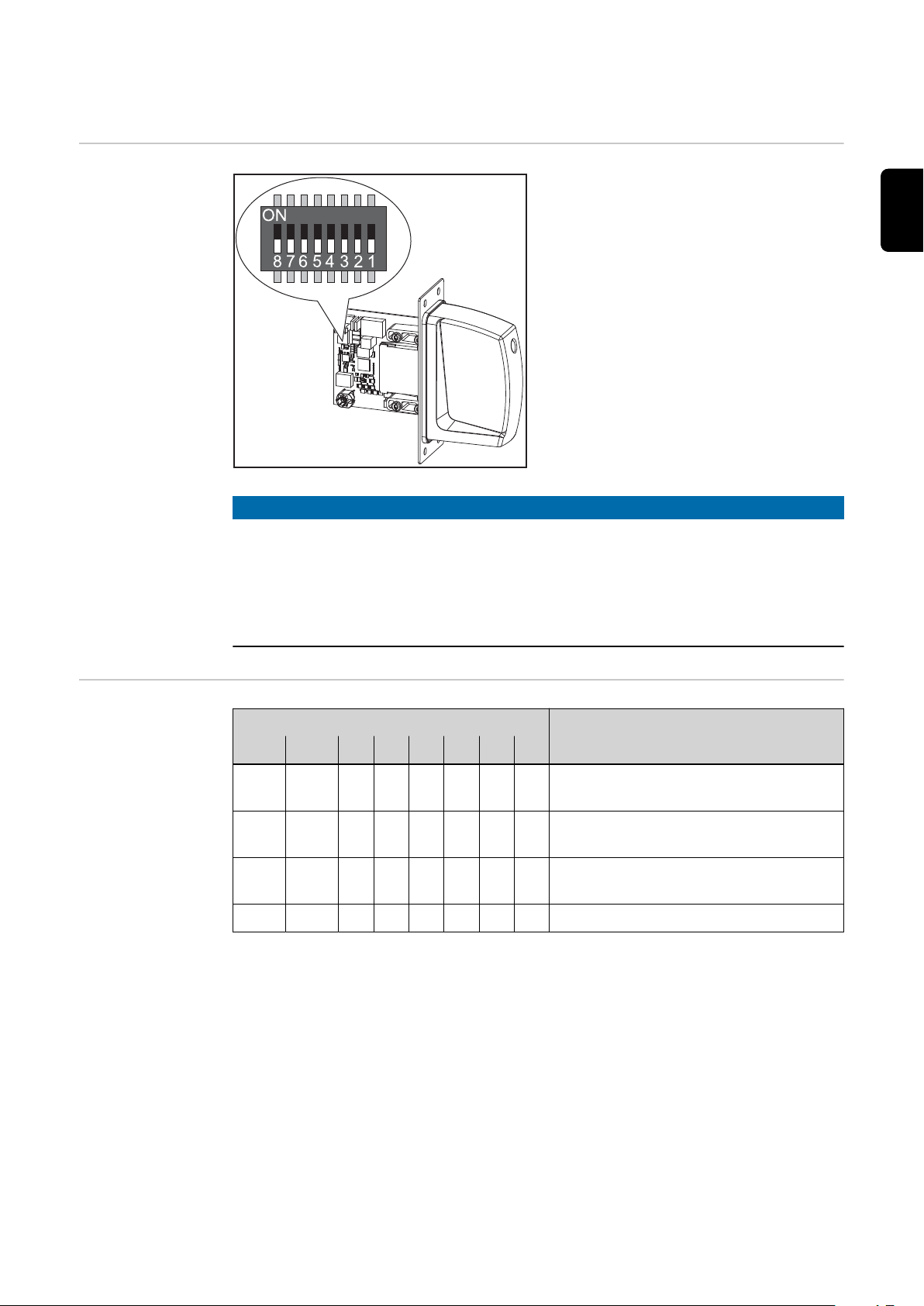
Funktion des DIPSchalters am
Interface
Der DIP‑Schalter am Roboter-Interface
dient zur Einstellung:
- der Prozessdaten-Breite
- der Knoteadresse / IP-Adresse
Werksseitig sind alle Positionen des DIPSchalters in der Stellung OFF. Dies entspricht dem binären Wert 0.
HINWEIS!
Riskio durch unwirksame DIP-Schalter-Einstellungen.
Funktionsstörungen können die Folge sein.
Nach jeder Änderung der DIP-Schalter-Einstellungen einen Neustart des Interfaces
▶
durchführen. Nur dadurch werden die Einstellungen wirksam.
Neustart des Interfaces = Unterbrechen und Wiederherstellen der Spannungsver-
▶
sorgung oder Ausführen der entsprechenden Funktion auf der Webseite der Stromquelle (SmartManager).
Konfiguration der
ProzessdatenBreite
DIP-Schalter
8 7 6 5 4 3 2 1 Konfiguration
OFF OFF - - - - - -
OFF ON - - - - - -
ON OFF - - - - - -
ON ON - - - - - - Nicht verwendet
Über die Prozessdaten-Breite wird der Umfang der übertragenen Datenmenge definiert.
Welche Datenmenge übertragen werden kann ist abhängig von
- der Roboter-Steuerung
- der Anzahl der Stromquellen
- der Art der Stromquellen
• „Intelligent Revolution“
• „Digital Revolution“ (Retro Fit)
Umfang abhängig von Busmodul
Standard Image
320 Bit
Economy Image
128 Bit
Retro Fit
9
Page 10
Knotenadresse
einstellen mit
DIP-Schalter
(Beispiel)
DIP-Schalter
8 7 6 5 4 3 2 1 Knotenadresse
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
Die Knotenadresse wird mit den Positionen 1 bis 6 des DIP-Schalters eingestellt.
Die Einstellung erfolgt im Binärformat. Das ergibt einen Einstellbereich von 1 bis 63 im
Dezimalformat
HINWEIS!
Nach jeder Änderung der DIP-Schalter Einstellungen ist ein Neustart des Interface
durchzuführen damit die Änderungen wirksam werden.
(Neustart = Unterbrechen und Wiederherstellen der Spannungsversorgung
oder Ausführen der entsprechenden Funktion auf der Webseite der Stromquelle)
10
Page 11
Roboter-Interface einbauen
DE
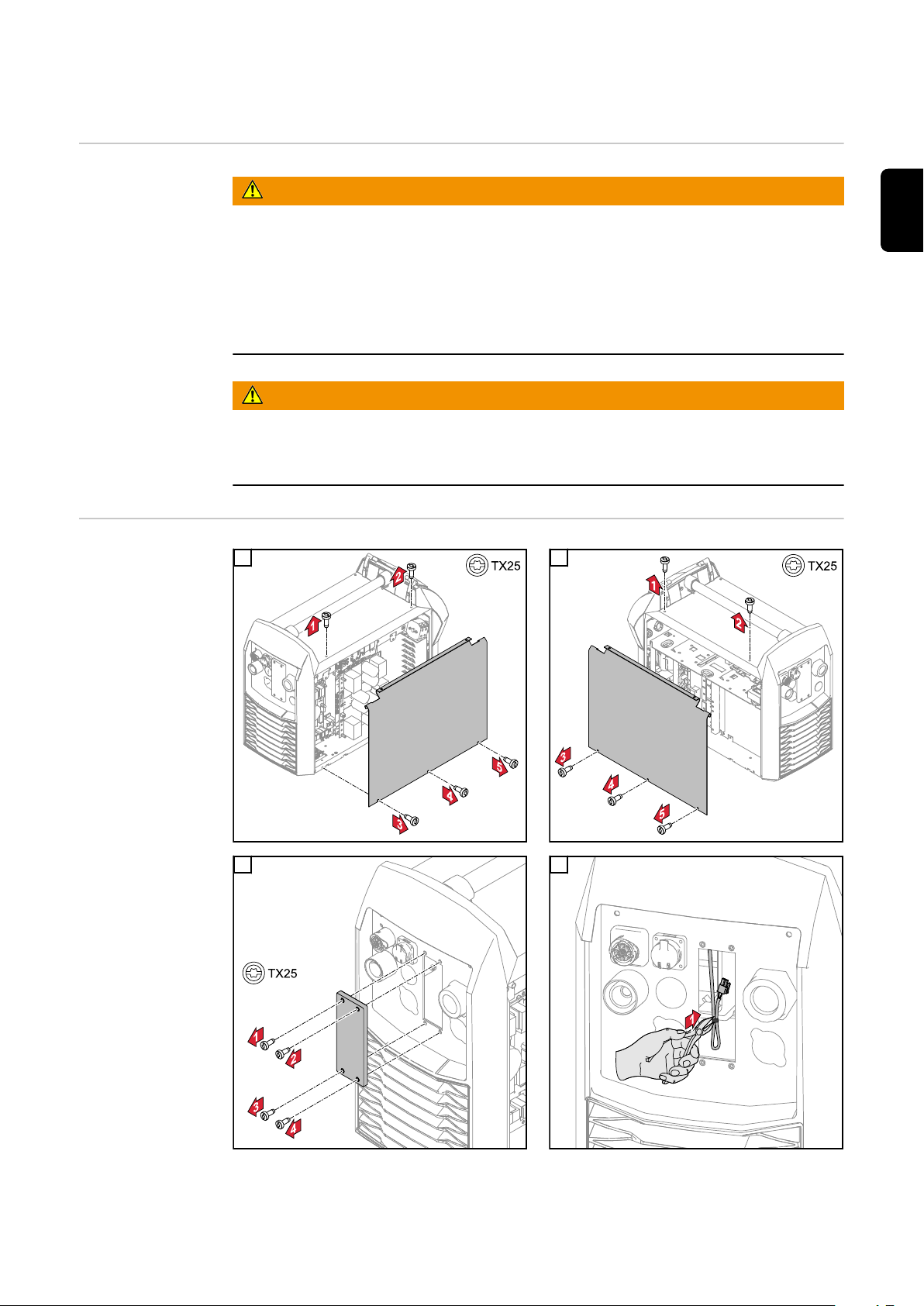
Sicherheit
Vorbereitung
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen und Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und
▶
von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstel-
▶
len, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen
sind.
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl verwenden.
▶
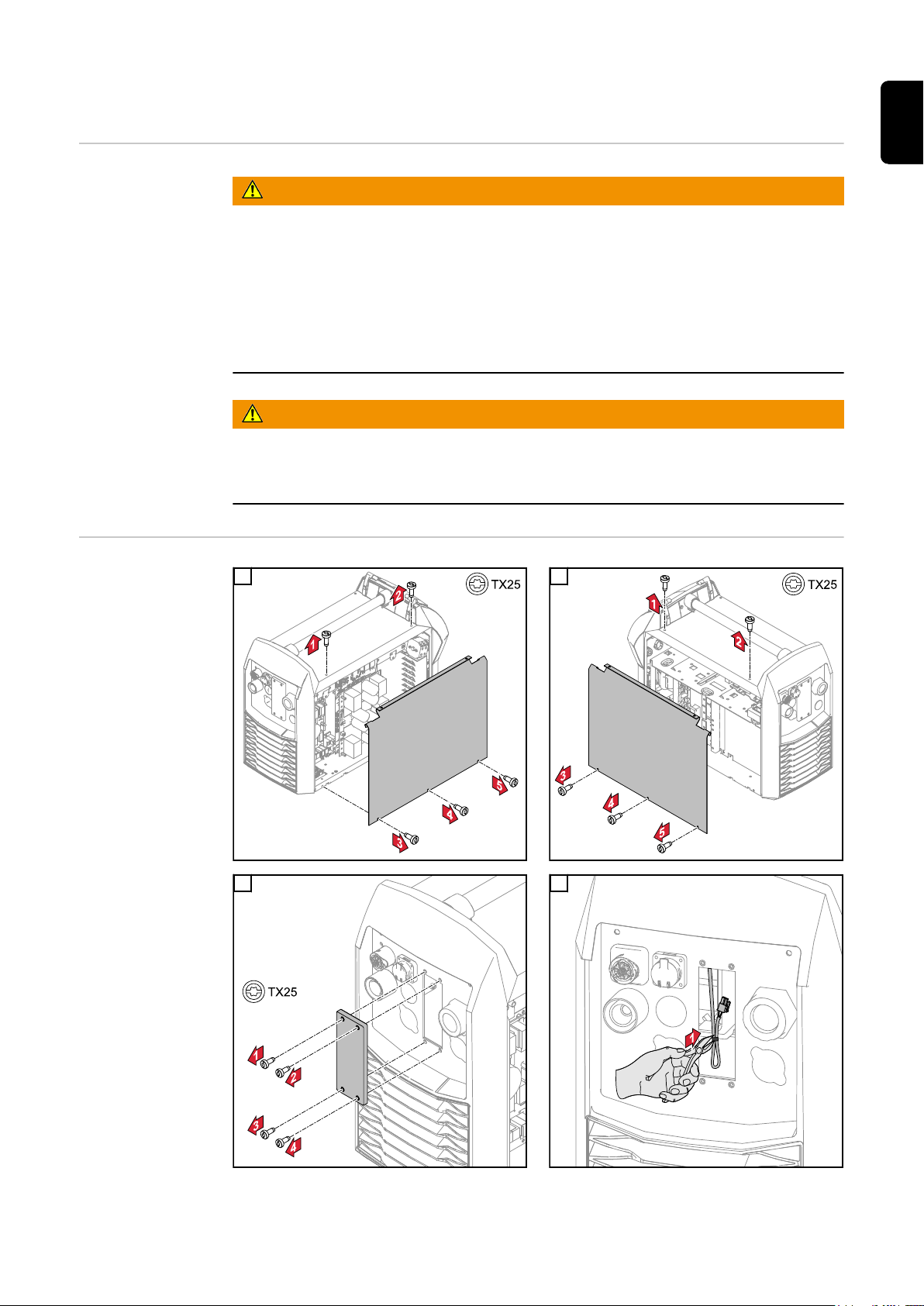
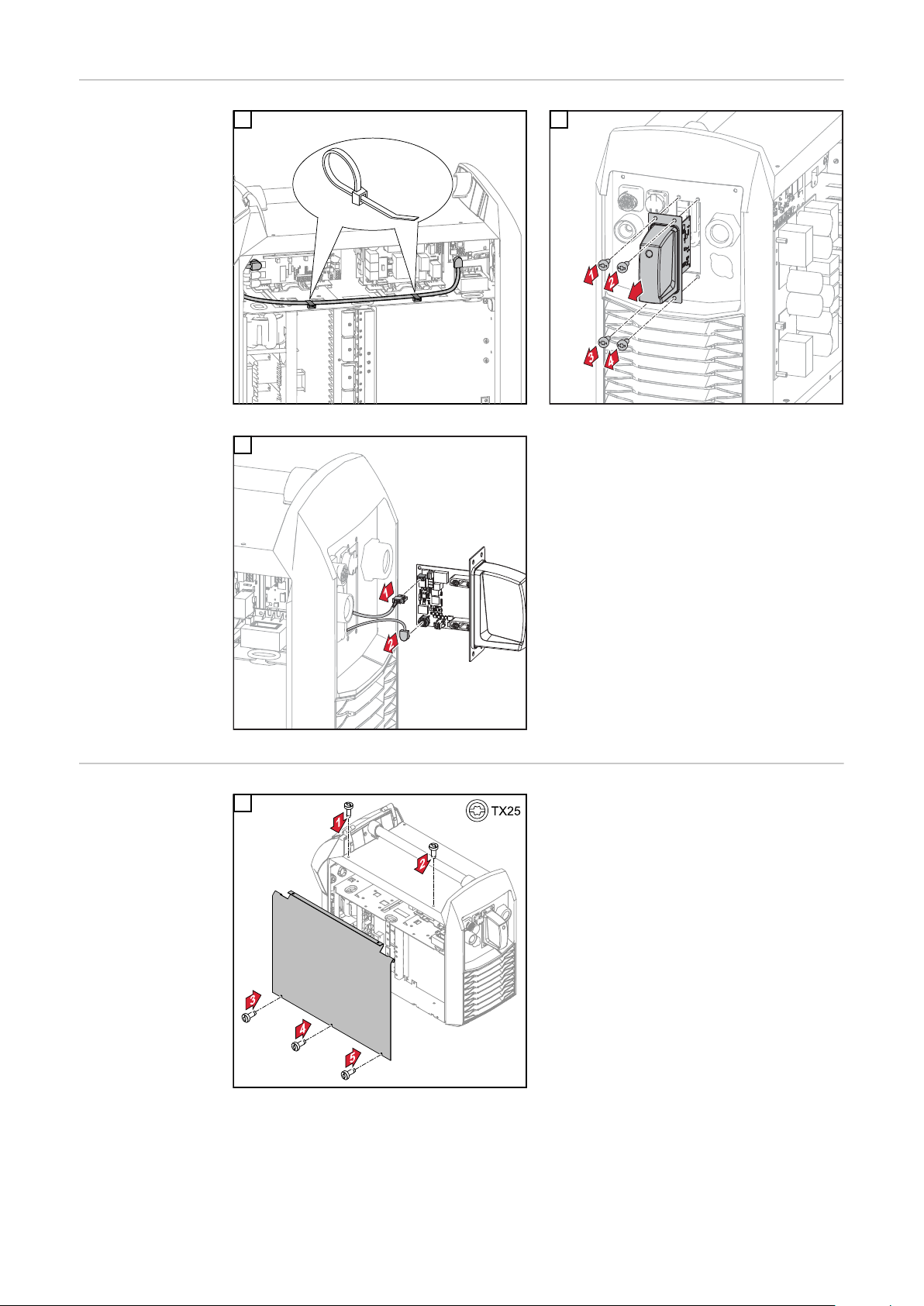
1 2
3
4
Kabelbinder vom Kabel für die Spannungsversorgung
entfernen
11
Page 12

5
6
Kabel für die Spannungsversorgung aus der Strom-
quelle führen
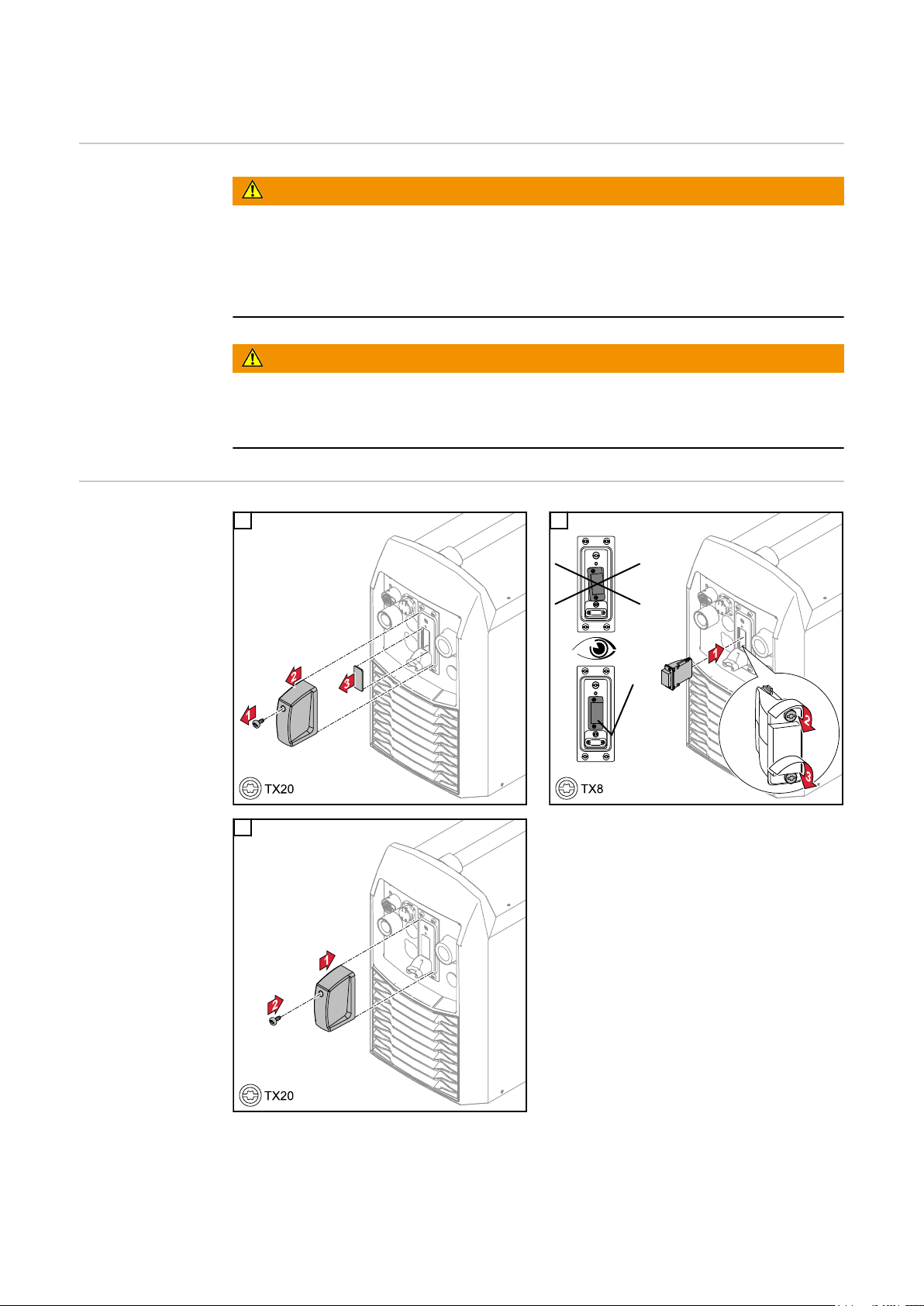
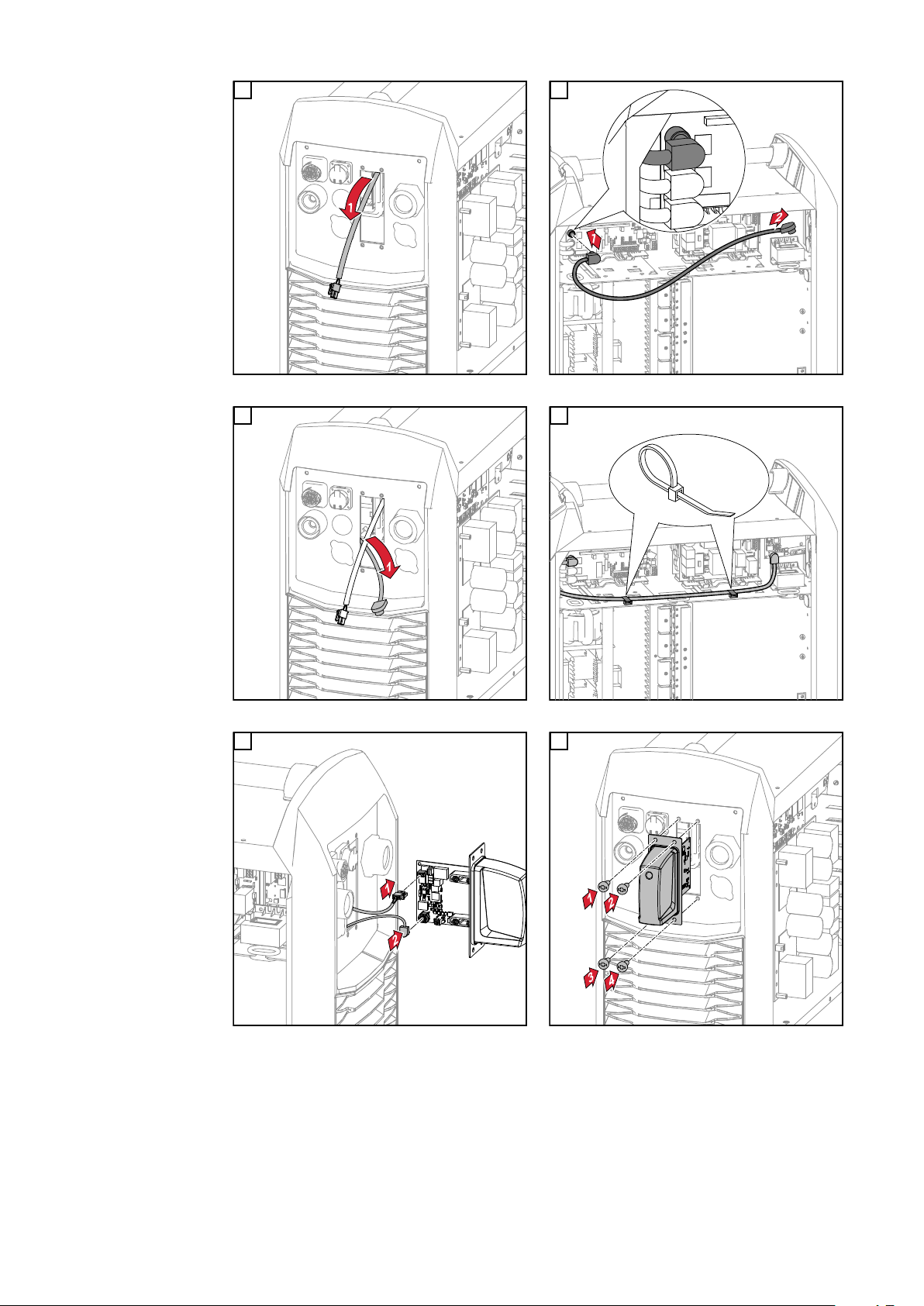
7
Datenkabel aus der Stromquelle führen
9 10
Datenkabel anschließen und verlegen
8
Datenkabel mit Kabelbindern sichern
12
Page 13

11 12
DE
13
Page 14
Busmodul in das Roboter-Interface einbauen
Sicherheit
Busmodul einbauen
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und
▶
von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl verwenden.
▶
1 2
14
3
Page 15
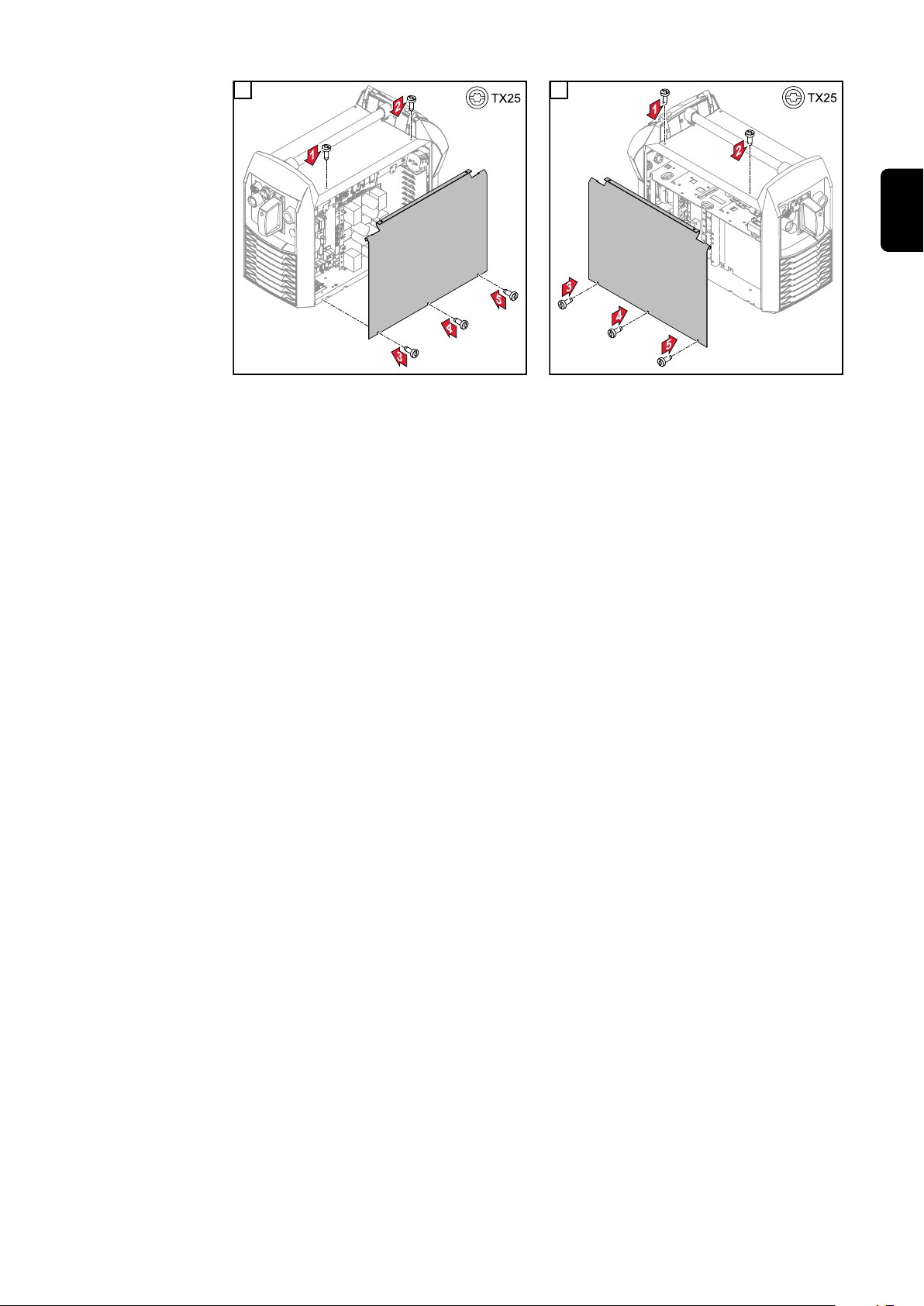
Roboter-Interface ausbauen
DE
Sicherheit
Vorbereitung
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen und Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und
▶
von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes sicherstel-
▶
len, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen
sind.
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl verwenden.
▶
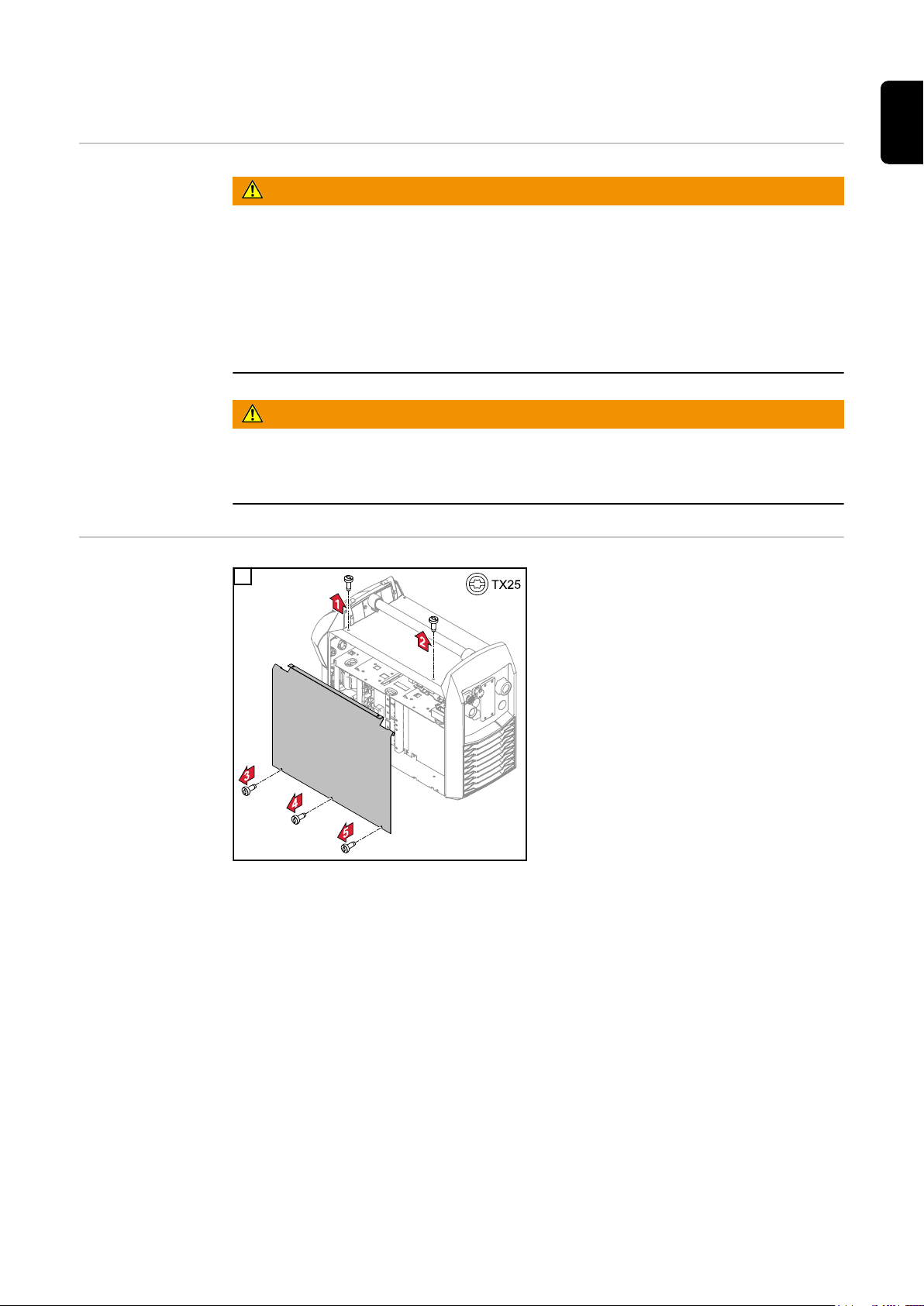
1
15
Page 16
Roboter-Interface
5
ausbauen
1
Kabelbinder lösen
3
2
Abschließende
Tätigkeiten
1
16
Page 17
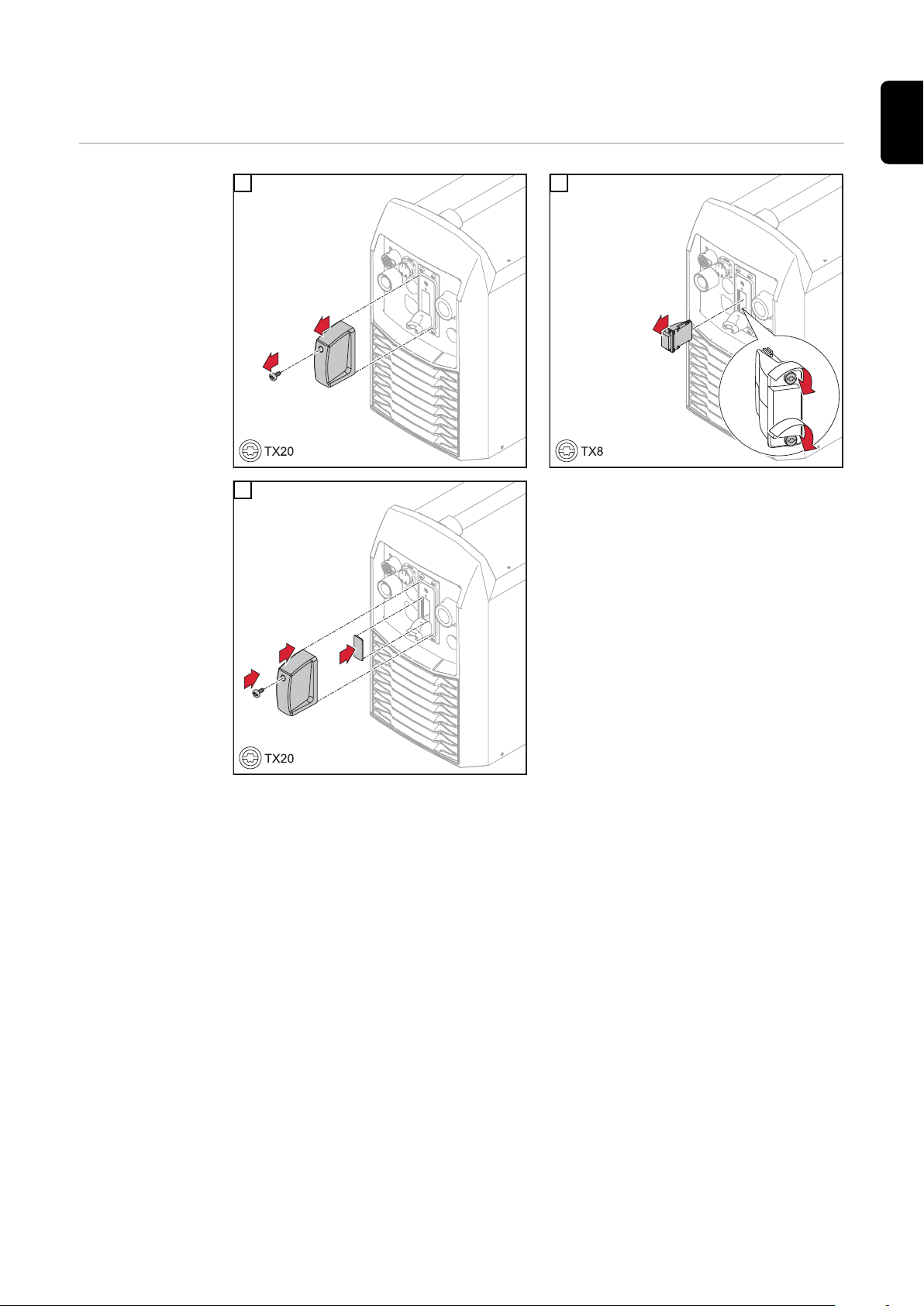
Busmodul ausbauen
1
2
1
2
3
3
1
2
DE
Busmodul ausbauen
1
3
2
17
Page 18

18
Page 19
Table of contents
General 20
Device Concept 20
Scope of supply 20
Environmental Conditions 21
Technical data 21
Safety 21
Connection Sockets and Indicators on the Robot Interface 22
Connections on the robot interface 22
LEDs on robot interface PCB 23
LEDs for power supply diagnosis 23
LEDs for Network Connection Diagnosis 24
Configuration of robot interface 25
Function of the DIP switch on the interface 25
Configuration of the process data width 25
Set node address with dip switch(example) 26
Installing the Robot Interface 27
Safety 27
Preparation 27
Installing the bus module in the robot interface 30
Safety 30
Installing the Bus Module 30
Removing the robot interface 31
Safety 31
Preparation 31
Removing the robot interface 31
Final tasks 32
Removing the bus module 33
Removing the bus module 33
EN-US
19
Page 20
General
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
(1)
(2)
(3)
Device Concept The robot interface serves as an interface between the power source and standardized
bus modules supporting a wide range of communication protocols.
Fronius may factory-fit the robot interface in the power source but it can also be retrofitted by appropriately trained and qualified personnel.
Scope of supply
(1) Robot control system
(2) SpeedNet data cable
(3) Robot interface
(4) Power source
(5) Cooling unit
(6) Interconnecting hosepack
(7) Wirefeeder
(8) Robot
(1) RI FB Inside/i
(2) Data cable
4-pin
(3) 4 cable ties
(4) These Operating Instructions
(not pictured)
20
Page 21
Environmental
Conditions
CAUTION!
A risk is posed by prohibited environmental conditions.
This can result in severe damage to equipment.
Only store and operate the device under the following environmental conditions.
▶
Temperature range of ambient air:
- During operation: -10 °C to +40 °C (14 °F to 104 °F)
- During transport and storage: -20 °C to +55 °C (-4 °F to 131 °F)
Relative humidity:
- Up to 50% at 40 °C (104 °F)
- Up to 90% at 20 °C (68 °F)
Ambient air: free of dust, acids, corrosive gases or substances, etc.
Altitude above sea level: up to 2000 m (6500 ft).
EN-US
Technical data
Safety
Power supply Internal (24 V)
Protection class IP 23
WARNING!
Danger from incorrect operation and work that is not carried out properly.
Serious injury and damage to property may result.
All the work and functions described in this document must only be carried out by
▶
trained and qualified personnel.
Read and understand this document.
▶
Read and understand all the Operating Instructions for the system components,
▶
especially the safety rules.
WARNING!
Danger from unplanned signal transmission.
Serious injury and damage to property may result.
Do not transfer safety signals via the interface.
▶
21
Page 22
Connection Sockets and Indicators on the Robot
(2) (3)
(1)
Interface
Connections on
the robot interface
(1) Power supply connection
2-pin
(2) SpeedNet data cable connection
4-pin
(3) Bus module connection
22
Page 23
LEDs on robot
(2)
(1)
(7)
(4)
(3)
(5)
(6)
(8)
interface PCB
EN-US
(1) ETH1 LED Green For diagnosing the network connection.
For details, see section below titled "LEDs
(2) ETH2 LED Orange
for network connection diagnosis"
(3) LED 3 Green
No function
(4) LED 4 Green
- Flashes at 4 Hz = No SpeedNet connection
(5) LED 5 Green
- Flashes at 20 Hz = Establishing
SpeedNet connection
- Flashes at 1 Hz = SpeedNet connection established
Lights up when an internal error occurs.
(6) LED 6 Red
Remedy: Restart the robot interface. If this
does not resolve the issue, inform the service team.
(7) +3V3 LED Green For diagnosing the power supply.
For details, see section below titled "LEDs
(8) +24V LED Green
for power supply diagnosis"
LEDs for power
supply diagnosis
LED Display Meaning Cause
- Robot interface power
supply not established
- Power supply cable faulty
+24V
Off
Lights up
No supply voltage available for
interface
24 VDC supply voltage
present on robot interface
23
Page 24
LED Display Meaning Cause
- 24 VDC supply voltage
+3V3
Off
No operating voltage present
on robot interface
not present
- Robot interface power
supply unit is faulty
LEDs for Network
Connection Diagnosis
Lights up
LED Indicator Meaning Cause
Off No network connection
ETH1
Lights up
Flashes Data transfer in progress
Off Transmission speed 10 Mbit/s
ETH2
Lights up
3 VDC operating voltage
present on robot interface
Network connection established
Transmission speed
100 Mbit/s
- No network connection
established for interface
- Network cable faulty
24
Page 25
Configuration of robot interface
Function of the
DIP switch on the
interface
The DIP switch on the robot interface is
used to configure:
- the process data width
- the node address/IP address
Factory default: all positions of the DIP
switch are in the OFF position. This corresponds to the binary value 0.
NOTE!
Risk due to invalid DIP switch settings.
This may result in malfunctions.
Every time you change the DIP switch settings, re-start the interface afterwards.
▶
This is essential for the changes to take effect.
Interface re-start = disconnect and reconnect the power supply or execute the corre-
▶
sponding function on the power source website (SmartManager).
EN-US
Configuration of
the process data
width
Dip switch
8 7 6 5 4 3 2 1 Configuration
OFF OFF - - - - - -
OFF ON - - - - - -
ON OFF - - - - - -
ON ON - - - - - - Not used
The process data width defines the scope of the transferred data volume.
The kind of data volume that can be transferred depends on
- the robot controls
- the number of power sources
- the type of power sources
• "Intelligent Revolution"
• "Digital Revolution" (Retro Fit)
Scope dependent on bus module
Standard image
320 Bit
Economy image
128 Bit
Retro Fit
25
Page 26
Set node address
with dip switch
(example)
Dip switch
8 7 6 5 4 3 2 1 Node address
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
The node address is set with positions 1 to 6 of the dip switch.
The configuration is carried out in binary format. This results in a configuration range of 1
to 63 in decimal format
NOTE!
After every change of the configurations of the dip switch settings, the interface
needs to be restarted so that the changes will take effect.
(Restart = interrupting and restoring the power supply
or executing the relevant function on the website of the power source)
26
Page 27
Installing the Robot Interface
Safety
Preparation
WARNING!
Danger from electric current.
This can result in serious injuries and death.
Before starting work, switch off all the devices and components involved and discon-
▶
nect them from the grid.
Secure all devices and components involved so they cannot be switched back on.
▶
After opening the device, use a suitable measuring instrument to check that electri-
▶
cally charged components (such as capacitors) have been discharged.
WARNING!
Danger from electrical current due to inadequate ground conductor connection.
This can result in serious injury and damage to property.
Always use the original housing screws in the original quantity.
▶
1 2
EN-US
3
4
Remove cable tie from power supply cable
27
Page 28
6
Lead the power supply cable out of the power source5Connect and install data cable
7
8
Lead the data cable out of the power source
9 10
Secure the data cable with cable ties
28
Page 29
11 12
EN-US
29
Page 30

Installing the bus module in the robot interface
Safety
Installing the Bus
Module
WARNING!
Danger from electrical current.
Serious injuries or death may result.
Before starting work, switch off all devices and components involved, and discon-
▶
nect them from the grid.
Secure all devices and components involved so that they cannot be switched back
▶
on.
WARNING!
Danger from electrical current due to inadequate ground conductor connection.
Serious personal injury and property damage may result.
Always use the original housing screws in the quantity initially supplied.
▶
1 2
30
3
Page 31

Removing the robot interface
5
Safety
Preparation
WARNING!
Danger from electric current.
This can result in serious injuries and death.
Before starting work, switch off all the devices and components involved and discon-
▶
nect them from the grid.
Secure all devices and components involved so they cannot be switched back on.
▶
After opening the device, use a suitable measuring instrument to check that electri-
▶
cally charged components (such as capacitors) have been discharged.
WARNING!
Danger from electrical current due to inadequate ground conductor connection.
This can result in serious injury and damage to property.
Always use the original housing screws in the original quantity.
▶
1
EN-US
Removing the
robot interface
1
Loosen the cable ties
2
31
Page 32

3
Final tasks
1
32
Page 33

Removing the bus module
1
2
1
2
3
3
1
2
Removing the
bus module
1
2
EN-US
3
33
Page 34

34
Page 35

Contenido
General 36
Concepto del sistema 36
Alcance del suministro 36
Condiciones ambientales 37
Datos técnicos 37
Seguridad 37
Bornas de conexión e indicadores en la interfaz de robot 38
Bornas de conexión en la interfaz de robot 38
Luces LED en el circuito impreso de la interfaz de robot 39
Luces LED para diagnósticos de la alimentación principal 40
Luces LED para diagnósticos de conexión de red 40
Configuración de la interfaz de robot 41
Función del interruptor DIP en la interfaz 41
Configuración del ancho de datos del proceso 41
Configure la dirección del nodo con interruptor DIP(ejemplo) 42
Instalar la interfaz de robot 43
Seguridad 43
Preparación 43
Instalar el módulo de bus en la interfaz de robot 46
Seguridad 46
Instalar el módulo de bus 46
Remover la interfaz de robot 47
Seguridad 47
Preparación 47
Remover la interfaz de robot 48
Tareas finales 48
Remover el módulo de bus 49
Remover el módulo de bus 49
ES-MX
35
Page 36

General
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
(1)
(2)
(3)
Concepto del sistema
La interfaz de robot sirve como la interfaz entre la fuente de poder y los módulos de bus
estandarizados soportando una amplia variedad de protocolos de comunicación.
Fronius puede ajustar de fábrica la interfaz de robot en la fuente de poder, pero también
puede ser readaptada por personal debidamente formado y calificado.
(1) Sistema de control de robot
(2) Cable de datos de SpeedNet
(3) Interfaz de robot
Alcance del suministro
(4) Fuente de poder
(5) Unidad de enfriamiento
(6) Juego de cables de interconexión
(7) Alimentador de alambre
(8) Robot
(1) RI FB dentro/i
(2) Cable de datos
4 pines
(3) 4 sujeciones de cables
(4) Este manual de instrucciones
(sin ilustraciones)
36
Page 37

Condiciones
ambientales
¡PRECAUCIÓN!
Las condiciones ambientales prohibidas representan un riesgo.
Esto puede resultar en daños graves al equipo.
Sólo almacene y opere el equipo en las siguientes condiciones ambientales.
▶
Rango de temperatura del aire ambiental:
- Durante la operación: -10 °C a +40 °C (14 °F a 104 °F)
- Durante el transporte y almacenamiento: -20 °C a +55 °C (-4 °F a 131 °F)
Datos técnicos
Seguridad
Humedad relativa:
- Hasta 50 % a 40 °C (104 °F)
- Hasta 90 % a 20 °C (68 °F)
Aire ambiente: libre de polvo, ácidos, gases o sustancias corrosivas, etc.
Altitud sobre el nivel del mar: hasta 2000 m (6500 ft).
Alimentación principal Interno (24 V)
Grado de protección IP23
¡PELIGRO!
Peligro por fallos del sistema y el trabajo que no es realizado de forma adecuada.
Puede resultar en lesiones graves y daños a la propiedad.
Todo el trabajo y las funciones que se describen en este documento deben realiz-
▶
arse únicamente por personal calificado y capacitado.
Lea y entienda este documento.
▶
Lea y entienda todo el Manual de instrucciones para los componentes del sistema,
▶
especialmente las normas de seguridad.
ES-MX
¡PELIGRO!
Peligro por transmisión de señal no planificada.
Puede resultar en lesiones graves y daños a la propiedad.
No transfiera las señales de seguridad a través de la interface.
▶
37
Page 38

Bornas de conexión e indicadores en la interfaz de
(2) (3)
(1)
robot
Bornas de conexión en la interfaz de robot
(1) Borna de conexión de la alimen-
tación principal
2 pines
(2) Borna de conexión de cable de
datos de SpeedNet
4 pines
(3) Borna de conexión de módulo
de bus
38
Page 39

Luces LED en el
(2)
(1)
(7)
(4)
(3)
(5)
(6)
(8)
circuito impreso
de la interfaz de
robot
ES-MX
(1) LED ETH1 Verde Para diagnosticar la conexión de red.
Para obtener más información, consulte la
sección a continuación titulada “Luces
(2) LED ETH2 Naranja
LED para diagnósticos de conexión de
red”
(3) LED 3 Verde
Sin función
(4) LED 4 Verde
- Destello a 4 Hz = Sin conexión de
SpeedNet
(5) LED 5 Verde
- Destello a 20 Hz = Estableciendo
conexión de SpeedNet
- Destello a 1 Hz = Conexión de
SpeedNet establecida
Se ilumina cuando ocurre un error interno.
(6) LED 6 Rojo
Solución: Reinicie la interfaz de robot. Si
esto no soluciona el problema, informe al
equipo de servicio.
(7) LED +3V3 Verde Para diagnosticar la alimentación princi-
pal.
Para obtener más información, consulte la
(8) LED +24V Verde
sección a continuación titulada “Luces
LED para diagnósticos de la alimentación
principal”
39
Page 40

Luces LED para
diagnósticos de
la alimentación
principal
LED Pantalla Significado Causa
- Alimentación principal de
la interfaz de robot no
establecida
- Cable de alimentación
principal defectuoso
+24V
Apagado
Sin tensión de alimentación
disponible para la interfaz
Luces LED para
diagnósticos de
conexión de red
Luces
encendidas
Apagado
+3V3
Luces
encendidas
LED Indicador Significado Causa
Apagado Sin conexión de red
ETH1
Luces
encendidas
Tensión de alimentación de
24 VDC presente en la interfaz
de robot
Sin voltaje de funcionamiento
presente en la interfaz de
robot
Voltaje de funcionamiento de
3 VDC presente en la interfaz
de robot
Conexión de red establecida
- Tensión de alimentación
de 24 VDC no presente
- La unidad de alimentación
principal de la interfaz de
robot está defectuosa
- Sin conexión de red establecida para la interfaz
- Cable de red defectuoso
ETH2
Destello
Apagado
Luces
encendidas
Transmisión de datos en progreso
Velocidad de transmisión de
10 Mbit/s
Velocidad de transmisión de
100 Mbit/s
40
Page 41

Configuración de la interfaz de robot
Función del interruptor DIP en la
interfaz
El interruptor DIP en la interfaz de robot se
utiliza para configurar lo siguiente:
- el ancho de datos del proceso
- la dirección del nodo/dirección IP
Configuración predeterminada de fábrica:
todos los interruptores DIP están en la
posición APAGADO. Esto corresponde al
valor binario 0.
¡OBSERVACIÓN!
Riesgo debido a configuración inválida del interruptor DIP.
Esto puede resultar en fallos.
Cada vez que cambie la configuración del interruptor DIP, reinicie la interfaz
▶
después. Esto es esencial para que los cambios se apliquen.
Reinicio de la interfaz = desconecte y reconecte la alimentación principal o ejecute
▶
la función correspondiente en el sitio web de la fuente de poder (SmartManager).
ES-MX
Configuración del
ancho de datos
del proceso
Interruptor DIP
8 7 6 5 4 3 2 1 Configuración
APAGAD
APAGAD
ENC
END
IDO
ENC
END
IDO
El ancho de datos del proceso define el ámbito del volumen de datos transferidos.
El tipo de volumen de datos que pueden ser transferidos depende de
- los controles de robot
- el número de fuentes de poder
- el tipo de fuentes de poder
APAGADO- - - - - -
O
ENC
END
O
IDO
APAGADO- - - - - -
ENC
END
IDO
• “Revolución inteligente”
• “Revolución digital” (readaptación)
- - - - - -
- - - - - - No usado
Imagen estándar
320 Bit
Imagen de economía
128 Bit
Readaptación
Ámbito dependiente del módulo de bus
41
Page 42

Configure la
dirección del
nodo con interruptor DIP
(ejemplo)
Interruptor DIP
8 7 6 5 4 3 2 1 Dirección del nodo
- - APAGAD
APAGAD
O
APAGAD
O
APAGAD
O
APAGAD
O
ENC
END
O
IDO
1
- - APAGAD
- - APAGAD
- - ENC
END
IDO
- - ENC
END
IDO
La dirección del nodo se configura con las posiciones del 1 al 6 del interruptor DIP.
La configuración se lleva a cabo en formato binario. Esto resulta en un rango de configuración del 1 al 63 en formato decimal
¡OBSERVACIÓN!
En cada cambio de las configuraciones del interruptor DIP, la interfaz debe ser reiniciada para que los cambios se apliquen.
(Reinicio = interrumpir y restaurar la alimentación principal
o ejecutar la función relevante en el sitio web de la fuente de poder)
APAGAD
O
APAGAD
O
ENC
END
IDO
ENC
END
IDO
APAGAD
O
APAGAD
O
ENC
END
IDO
ENC
END
IDO
APAGAD
O
APAGAD
O
ENC
END
IDO
ENC
END
IDO
ENC
END
O
IDO
ENC
END
O
IDO
ENC
END
IDO
ENC
END
IDO
APAGAD
O
ENC
END
IDO
APAGAD
O
ENC
END
IDO
2
3
62
63
42
Page 43

Instalar la interfaz de robot
Seguridad
Preparación
¡PELIGRO!
Peligro por corriente eléctrica.
Esto puede resultar en lesiones graves y la muerte.
Antes de empezar a trabajar, apague todos los dispositivos y componentes involuc-
▶
rados y desconéctelos de la red de corriente.
Asegure todos los equipos y componentes involucrados para que no puedan ser
▶
encendidos de nuevo.
Después de abrir el equipo, use un instrumento de medición adecuado para verificar
▶
que los componentes cargados eléctricamente (por ejemplo, condensadores) se
han descargado.
¡PELIGRO!
Peligro por corriente eléctrica debido a una conexión de conductor protector inadecuada.
Esto puede resultar en lesiones graves y daños a la propiedad.
Siempre use los tornillos originales de la carcasa en la cantidad original.
▶
1 2
ES-MX
43
Page 44

3
5
4
Remueva la sujeción de cables del cable de alimen-
tación principal
6
Saque el cable de alimentación principal de la fuente
de poder
7
Saque el cable de datos de la fuente de poder
Conecte e instale el cable de datos
8
Asegure el cable de datos con sujeciones de cables
44
Page 45

9 10
11 12
ES-MX
45
Page 46

Instalar el módulo de bus en la interfaz de robot
Seguridad
Instalar el
módulo de bus
¡PELIGRO!
Peligro por corriente eléctrica.
Se pueden ocasionar lesiones graves o incluso la muerte.
Antes de empezar a trabajar, apague todos los dispositivos y componentes involuc-
▶
rados y desconéctelos de la red de corriente.
Asegure todos los equipos y componentes involucrados para que no puedan ser
▶
encendidos de nuevo.
¡PELIGRO!
Peligro por corriente eléctrica debido a una conexión de conductor protector inadecuada.
Puede resultar en lesiones personales graves y daños a la propiedad.
Siempre use los tornillos originales de la carcasa en la cantidad suministrada ini-
▶
cialmente.
1 2
46
3
Page 47

Remover la interfaz de robot
Seguridad
Preparación
¡PELIGRO!
Peligro por corriente eléctrica.
Esto puede resultar en lesiones graves y la muerte.
Antes de empezar a trabajar, apague todos los dispositivos y componentes involuc-
▶
rados y desconéctelos de la red de corriente.
Asegure todos los equipos y componentes involucrados para que no puedan ser
▶
encendidos de nuevo.
Después de abrir el equipo, use un instrumento de medición adecuado para verificar
▶
que los componentes cargados eléctricamente (por ejemplo, condensadores) se
han descargado.
¡PELIGRO!
Peligro por corriente eléctrica debido a una conexión de conductor protector inadecuada.
Esto puede resultar en lesiones graves y daños a la propiedad.
Siempre use los tornillos originales de la carcasa en la cantidad original.
▶
1
ES-MX
47
Page 48

Remover la inter-
5
faz de robot
1
Aflojar las sujeciones de cables
3
2
Tareas finales
1
48
Page 49

Remover el módulo de bus
1
2
1
2
3
3
1
2
Remover el
módulo de bus
1
2
ES-MX
3
49
Page 50

50
Page 51

Sommaire
Généralités 52
Concept d'appareil 52
Contenu de la livraison 52
Conditions environnementales 53
Caractéristiques techniques 53
Sécurité 53
Connecteurs et voyants sur l'interface robot 54
Connecteurs sur l'interface robot 54
LED sur le circuit imprimé de l'interface robot 55
LED pour le diagnostic de l'alimentation électrique 56
DEL pour le diagnostic de la connexion réseau 56
Configurer l'interface robot 57
Fonction du commutateur DIP sur l'interface 57
Configuration de la bande passante des données de processus 57
Régler l'adresse de nœud avec le commutateur DIP(exemple) 58
Installer l’interface robot 59
Sécurité 59
Préparation 59
Monter le module de bus dans l'interface robot 62
Sécurité 62
Monter le module de bus 62
Démonter l'interface robot 63
Sécurité 63
Préparation 63
Démonter l'interface robot 64
Étapes finales 64
Démonter le module bus 65
Démonter le module de bus 65
FR
51
Page 52

Généralités
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
(1)
(2)
(3)
Concept d'appareil
L'interface robot sert d'interface entre la source de courant et les modules de bus standardisés pour différents protocoles de communication.
L'installation de l'interface robot dans la source de courant peut être effectuée en usine
par Fronius ou plus tard par un personnel qualifié formé en conséquence.
(1) Commande robot
(2) Câble de données SpeedNet
(3) Interface robot
Contenu de la livraison
(4) Source de courant
(5) Refroidisseur
(6) Faisceau de liaison
(7) Dévidoir
(8) Robot
(1) RI FB Inside/i
(2) Câble de données
4-pôles
(3) 4 attache-câbles
(4) Les présentes instructions de
service
(non illustrées)
52
Page 53

Conditions environnementales
ATTENTION!
Danger en cas de conditions environnementales non autorisées.
Cela peut entraîner de graves dommages matériels.
Stocker et utiliser l'appareil uniquement dans les conditions environnementales
▶
indiquées ci-après.
Plage de température pour l'air ambiant :
- en fonctionnement : -10 °C à +40 °C (14 °F à 104 °F)
- lors du transport et du stockage : -20 °C à +55 °C (-4 °F à 131 °F)
Humidité relative de l'air :
- jusqu'à 50 % à 40 °C (104 °F)
- jusqu'à 90 % à 20 °C (68 °F)
Air ambiant : absence de poussières, acides, substances ou dégagements gazeux
corrosifs, etc.
Altitude au-dessus du niveau de la mer : jusqu'à 2 000 m (6500 ft).
FR
Caractéristiques
techniques
Sécurité
Alimentation électrique interne (24 V)
Indice de protection IP 23
AVERTISSEMENT!
Danger en cas d'erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document doivent
▶
uniquement être exécutés par du personnel qualifié.
Le présent document doit être lu et compris.
▶
Toutes les instructions de service des composants périphériques, en particulier les
▶
consignes de sécurité, doivent être lues et comprises.
AVERTISSEMENT!
Danger en cas de transmission de signal imprévue.
Cela peut entraîner des dommages corporels et matériels graves.
Ne pas transmettre de signaux relatifs à la sécurité via l'interface.
▶
53
Page 54

Connecteurs et voyants sur l'interface robot
(2) (3)
(1)
Connecteurs sur
l'interface robot
(1) Connecteur de l'alimentation
électrique
2 pôles
(2) Connecteur du câble de
données SpeedNet
4 pôles
(3) Connecteur du module de bus
54
Page 55

LED sur le circuit
(2)
(1)
(7)
(4)
(3)
(5)
(6)
(8)
imprimé de
l'interface robot
FR
(1) LED ETH1 Verte Pour le diagnostic de la connexion
réseau.
Pour plus de détails, voir la section suiv-
(2) LED ETH2 Orange
ante « LED pour le diagnostic de la connexion réseau »
(3) LED 3 Verte
Pas de fonction
(4) LED 4 Verte
- Clignote à 4 Hz = pas de connexion à
SpeedNet
(5) LED 5 Verte
- Clignote à 20Hz = la connexion à
SpeedNet est en cours
- Clignote à 1 Hz = connexion à
SpeedNet établie
S'allume en cas d'erreur interne.
Élimination des erreurs : redémarrer
(6) LED 6 Rouge
l'interface robot. Si aucune amélioration
n'est visible, contacter le service aprèsvente.
(7) LED +3V3 Verte Pour le diagnostic de l'alimentation électri-
que.
Pour plus de détails, voir la section suiv-
(8) LED +24V Verte
ante « LED pour le diagnostic de l'alimentation électrique »
55
Page 56

LED pour le diagnostic de l'alimentation électrique
LED Affichage Signification Cause
- Pas d'alimentation électrique active pour l'interface
robot
- Câble d'alimentation
défectueux
+24V
Off
Aucune tension d'alimentation
disponible pour l'interface
DEL pour le diagnostic de la connexion réseau
Allumée
Off
+3V3
Allumée
DEL Affichage Signification Cause
Off
ETH1
Allumée Connexion réseau disponible
Clignote Transfert de données actif
Off
ETH2
Allumée
Tension d'alimentation 24 VDC
disponible sur l'interface robot
Pas de tension électrique sur
l'interface robot
Tension de service 3 VDC disponible sur l'interface robot
Aucune connexion réseau disponible
Vitesse de transmission
10 Mbit/s
Vitesse de transmission
100 Mbit/s
- Tension d'alimentation
24 VDC non disponible
sur l'interface
- Bloc d'alimentation sur
l'interface robot défectueux
- Pas de connexion réseau
active pour l'interface
- Câble réseau défectueux
56
Page 57

Configurer l'interface robot
Fonction du commutateur DIP sur
l'interface
Le commutateur‑DIP sur l'interface robot
sert au réglage :
- de la bande passante de données de
process
- de l'adresse de nœud/l'adresse IP
Par défaut, toutes les positions du commutateur DIP sont en position OFF. Cela correspond à la valeur binaire 0.
REMARQUE!
Risque dû à des réglages inefficaces du commutateur DIP.
Cela peut entraîner des dysfonctionnements.
Redémarrer l'interface après chaque modification des réglages du commutateur DIP.
▶
C'est la seule façon de rendre les réglages efficaces.
Redémarrage de l'interface = interruption et rétablissement de l'alimentation électri-
▶
que ou exécution de la fonction correspondante sur la page web de la source de
courant (SmartManager).
FR
Configuration de
la bande passante des
données de processus
Commutateur DIP
8 7 6 5 4 3 2 1 Configuration
OFF OFF - - - - - -
OFF ON - - - - - -
ON OFF - - - - - -
ON ON - - - - - - Non utilisé
Le volume de données transmises est défini par la bande passante des données de processus.
Le volume de données pouvant être transmises dépend des critères suivants :
- la commande robot
- le nombre de sources de courant
- le type de sources de courant
• « Intelligent Revolution » (« Révolution intelligente »)
• « Digital Revolution » (« Révolution numérique ») (Retro Fit)
Volume dépendant du module de bus
Image Standard
320 bits
Image Economy
128 bits
Retro Fit
57
Page 58

Régler l'adresse
de nœud avec le
commutateur DIP
(exemple)
Commutateur DIP
8 7 6 5 4 3 2 1 Adresse de nœud
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
L'adresse de nœud est réglée avec les positions 1 à 6 du commutateur DIP.
Le réglage se fait au format binaire. Cela équivaut à une plage de réglage de 1 à 63 au
format décimal.
REMARQUE!
Après chaque réglage du commutateur DIP, il est nécessaire de redémarrer l'interface afin que les modifications soient appliquées.
(Redémarrage = interruption puis rétablissement de l'alimentation en tension
ou exécution de la fonction correspondante sur le site Web de la source de courant)
58
Page 59

Installer l’interface robot
Sécurité
Préparation
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner la mort et des blessures graves.
Avant d'entamer les travaux, déconnecter tous les appareils et composants con-
▶
cernés et les débrancher du réseau électrique.
S'assurer que tous les appareils et composants concernés ne peuvent pas être
▶
reconnectés.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure approprié,
▶
que les composants à charge électrique (condensateurs, par ex.) sont déchargés.
AVERTISSEMENT!
Risque d'électrocution en cas de connexion de conducteur de terre insuffisante.
Cela peut entraîner des dommages corporels et matériels graves.
Toujours utiliser le nombre initial de vis originales du boîtier.
▶
1 2
FR
3
4
Enlever l'attache-câbles du câble pour l'alimentation
électrique
59
Page 60

6
Sortir le câble d'alimentation de la source de courant5Connecter et poser un câble de données
7
8
Sortir le câble de données de la source de courant
9 10
Sécuriser le câble de données avec des attache-
câbles
60
Page 61

11 12
FR
61
Page 62

Monter le module de bus dans l'interface robot
Sécurité
Monter le module
de bus
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner la mort ou des blessures graves.
Avant d'entamer les travaux, déconnecter tous les appareils et composants con-
▶
cernés et les débrancher du réseau électrique.
S'assurer que tous les appareils et composants concernés ne peuvent pas être
▶
remis en marche.
AVERTISSEMENT!
Risque d'électrocution en cas de connexion de conducteur de terre insuffisante.
Cela peut entraîner des dommages corporels et matériels graves.
Toujours utiliser le nombre initial de vis originales du boîtier.
▶
1 2
62
3
Page 63

Démonter l'interface robot
Sécurité
Préparation
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner la mort et des blessures graves.
Avant d'entamer les travaux, déconnecter tous les appareils et composants con-
▶
cernés et les débrancher du réseau électrique.
S'assurer que tous les appareils et composants concernés ne peuvent pas être
▶
reconnectés.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure approprié,
▶
que les composants à charge électrique (condensateurs, par ex.) sont déchargés.
AVERTISSEMENT!
Risque d'électrocution en cas de connexion de conducteur de terre insuffisante.
Cela peut entraîner des dommages corporels et matériels graves.
Toujours utiliser le nombre initial de vis originales du boîtier.
▶
1
FR
63
Page 64

Démonter l'inter-
5
face robot
1
Desserrer les attache-câbles
3
2
Étapes finales
1
64
Page 65

Démonter le module bus
1
2
1
2
3
3
1
2
Démonter le
module de bus
1
2
FR
3
65
Page 66

66
Page 67

Obsah
Všeobecné informace 68
Koncepce přístroje 68
Obsah balení 68
Okolní podmínky 69
Technické údaje 69
Bezpečnost 69
Přípojky a indikace na rozhraní robota 70
Přípojky na rozhraní robota 70
Kontrolky LED na PC-Boardu rozhraní robota 71
Kontrolky LED pro diagnostiku napájení 72
Kontrolky LED pro diagnostiku síťového připojení 72
Konfigurace rozhraní robota 73
Funkce přepínače DIP na rozhraní 73
Konfigurace šířky procesních dat 73
Nastavení adresy uzlu pomocí přepínače DIP(příklad) 74
Instalace rozhraní robota 75
Bezpečnost 75
Příprava 75
Instalace sběrnicového modulu do rozhraní robota 78
Bezpečnost 78
Instalace sběrnicového modulu 78
Odinstalace rozhraní robota 79
Bezpečnost 79
Příprava 79
Odinstalace rozhraní robota 80
Závěrečné úkony 80
Odinstalace sběrnicového modulu 81
Odinstalace sběrnicového modulu 81
CS
67
Page 68

Všeobecné informace
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
(1)
(2)
(3)
Koncepce
přístroje
Rozhraní robota slouží jako rozhraní mezi svařovacím zdrojem a standardizovanými
sběrnicovými moduly pro nejrůznější komunikační protokoly.
Vestavba rozhraní robota do svařovacího zdroje může být provedena buď standardně
společností Fronius nebo dodatečně, a to adekvátně proškoleným odborným pracovníkem.
(1) Řízení robota
(2) Datový kabel SpeedNet
Obsah balení
(3) Rozhraní robota
(4) Svařovací zdroj
(5) Chladicí modul
(6) Propojovací hadicové vedení
(7) Podavač drátu
(8) Robot
(1) RI FB Inside/i
(2) Datový kabel
4pólový
(3) 4 kabelové příchytky
(4) Tento návod k obsluze
(bez zobrazení)
68
Page 69

Okolní podmínky
POZOR!
Nebezpečí v důsledku nepřípustných okolních podmínek.
Může dojít k vážnému poškození přístroje.
Přístroj skladujte a provozujte jen za níže uvedených okolních podmínek.
▶
Teplotní rozmezí okolního vzduchu:
- při provozu: -10 °C až +40 °C (14 °F až 104 °F)
- při přepravě a skladování: -20 °C až +55 °C (-4 °F až 131 °F)
Relativní vlhkost vzduchu:
- do 50 % při 40 °C (104 °F)
- do 90 % při 20 °C (68 °F)
Okolní vzduch: nesmí obsahovat prach, kyseliny, korozivní plyny či látky apod.
Nadmořská výška: do 2000 m (6500 ft).
CS
Technické údaje
Bezpečnost
Zdroj napětí interní (24 V)
Krytí IP 23
VAROVÁNÍ!
Nebezpečí v důsledku nesprávné obsluhy a nesprávně provedených prací.
Následkem mohou být těžká poranění a materiální škody.
Veškeré práce popsané v tomto dokumentu smějí provádět jen odborně vyškolené
▶
osoby.
Tento dokument je nutné přečíst a porozumět mu.
▶
Všechny návody k obsluze systémových komponent, zejména bezpečnostní
▶
předpisy, je nutné přečíst a porozumět jim.
VAROVÁNÍ!
Nebezpečí v důsledku neplánovaného přenosu signálu.
Následkem mohou být těžká poranění a materiální škody.
Přes toto rozhraní se nesmí přenášet žádné bezpečností signály.
▶
69
Page 70

Přípojky a indikace na rozhraní robota
(2) (3)
(1)
Přípojky na
rozhraní robota
(1) Přípojka napájení
2pólová
(2) Přípojka datového kabelu
SpeedNet
4pólová
(3) Přípojka sběrnicového modulu
70
Page 71

Kontrolky LED na
(2)
(1)
(7)
(4)
(3)
(5)
(6)
(8)
PC-Boardu
rozhraní robota
CS
(1) LED ETH1 zelená Pro diagnostiku síťového spojení.
podrobnosti viz následující oddíl „Kon-
(2) LED ETH2
oranžov
á
trolky LED pro diagnostiku síťového spojení“
(3) LED 3 zelená
Bez funkce
(4) LED 4 zelená
- Bliká se 4 Hz = bez připojení
k SpeedNet
(5) LED 5 zelená
- Bliká s 20 Hz = připojení k SpeedNet
se vytváří
- Bliká s 1 Hz = připojení k SpeedNet je
vytvořené
Svítí při interní chybě.
(6) LED 6 červená
Odstranění chyby: Restartujte rozhraní
robota. Pokud nedojde ke zlepšení, kontaktujte servisní službu.
(7) LED +3V3 zelená Pro diagnostiku napájení.
podrobnosti viz následující oddíl „Kon-
(8) LED +24V zelená
trolky LED pro diagnostiku napájení“
71
Page 72

Kontrolky LED
pro diagnostiku
napájení
LED Zobra-
zení
Vyp.
+24V
Význam Příčina
- Nebylo vytvořeno
Napájecí napětí pro rozhraní
není k dispozici
napájení pro rozhraní
robota
- Vadný napájecí kabel
Kontrolky LED
pro diagnostiku
síťového připojení
Svítí
Vyp.
+3V3
Svítí
LED Indikace Význam Příčina
Nesvítí Chybí síťové připojení
ETH1
Svítí Síťové připojení je k dispozici
Bliká Aktivní přenos dat
Nesvítí Přenosová rychlost 10 Mbit/s
ETH2
Svítí Přenosová rychlost 100 Mbit/s
Napájecí napětí 24 V DC na
rozhraní robota je k dispozici
Provozní napětí na rozhraní
robota není k dispozici
Provozní napětí 3 V DC na
rozhraní robota je k dispozici
- Napájecí napětí 24 V DC
na rozhraní není k dispozici
- Vadný síťový zdroj
rozhraní robota
- Nebylo vytvořeno síťové
připojení pro rozhraní
- Vadný síťový kabel
72
Page 73

Konfigurace rozhraní robota
Funkce přepínače
DIP na rozhraní
Přepínač‑DIP na rozhraní robota slouží k
nastavení:
- šířky procesních dat
- adresy uzlu / IP adresy
Standardně jsou všechny polohy
přepínače DIP v poloze OFF. To odpovídá
binární hodnotě 0.
UPOZORNĚNĹ!
Nebezpečí v důsledku neúčinných nastavení přepínače DIP.
Následkem mohou být poruchy funkce.
Po každé změně nastavení přepínače DIP restartujte rozhraní. Jen tak budou nast-
▶
avení účinná.
Restart rozhraní = přerušení nebo obnovení napájení nebo provedení příslušné
▶
funkce na webové stránce svařovacího zdroje (SmartManager).
CS
Konfigurace šířky
procesních dat
Přepínač DIP
8 7 6 5 4 3 2 1 Konfigurace
OFF OFF - - - - - -
OFF ON - - - - - -
ON OFF - - - - - -
ON ON - - - - - - Nepoužito
Prostřednictvím šířky procesních dat je definován objem přenášeného souboru dat.
Jaký objem dat může být přenášen, závisí
- na řízení robota
- na počtu svařovacích zdrojů
- na typu svařovacích zdrojů
• „Inteligentní revoluce“
• „Digitální revoluce“ (Retro Fit)
Objem závisí na sběrnicovém modulu
Standardní bitový obraz
320 bitů
Ekonomický bitový obraz
128 bitů
Retro Fit
73
Page 74

Nastavení adresy
uzlu pomocí
přepínače DIP
(příklad)
Přepínač DIP
8 7 6 5 4 3 2 1 Adresa uzlu
- - OFF OFF OFF OFF OFF ON 1
- - OFF OFF OFF OFF ON OFF 2
- - OFF OFF OFF OFF ON ON 3
- - ON ON ON ON ON OFF 62
- - ON ON ON ON ON ON 63
Adresa uzlu se nastavuje pomocí poloh přepínače DIP 1 až 6.
Nastavení probíhá v binárním formátu. Z toho vyplývá rozsah nastavení od 1 do 63 v
desítkovém formátu.
UPOZORNĚNĹ!
Po každé změně nastavení přepínače DIP je třeba znovu spustit rozhraní, aby
změny byly účinné.
(Nové spuštění = přerušení a obnovení napájecího napětí
nebo provedení odpovídající funkce na webové stránce svařovacího zdroje)
74
Page 75

Instalace rozhraní robota
Bezpečnost
Příprava
VAROVÁNÍ!
Nebezpečí zásahu elektrickým proudem.
Následkem mohou být těžká zranění a smrt.
Před zahájením prací vypněte všechny začleněné přístroje a komponenty a odpojte
▶
je od elektrické sítě.
Zajistěte všechny začleněné přístroje a komponenty proti opětovnému zapnutí.
▶
Po otevření přístroje se pomocí vhodného měřicího přístroje ujistěte, že součásti,
▶
které mohou mít elektrický náboj (např. kondenzátory), jsou vybité.
VAROVÁNÍ!
Nebezpečí zásahu elektrickým proudem v důsledku nedostatečného propojení s
ochranným vodičem.
Následkem mohou být těžká poranění a materiální škody.
Vždy používejte originální šrouby pláště v původním počtu.
▶
1 2
CS
3
4
Odstraňte kabelovou příchytku z kabelu pro napájení
75
Page 76

5
6
Vyveďte kabel pro napájení ze svařovacího zdroje
7
Vyveďte datový kabel ze svařovacího zdroje
9 10
Připojte a položte datový kabel
8
Zajistěte datový kabel kabelovými příchytkami
76
Page 77

11 12
CS
77
Page 78

Instalace sběrnicového modulu do rozhraní robota
Bezpečnost
Instalace sběrnicového modulu
VAROVÁNÍ!
Nebezpečí zásahu elektrickým proudem.
Následkem mohou být těžká zranění nebo smrt.
Před zahájením prací vypněte všechny začleněné přístroje a komponenty a odpojte
▶
je od elektrické sítě.
Zajistěte všechny začleněné přístroje a komponenty proti opětovnému zapnutí.
▶
VAROVÁNÍ!
Nebezpečí zásahu elektrickým proudem v důsledku nedostatečného propojení s
ochranným vodičem.
Následkem mohou být těžká poranění a materiální škody.
Vždy používejte originální šrouby pláště v původním počtu.
▶
1 2
78
3
Page 79

Odinstalace rozhraní robota
Bezpečnost
Příprava
VAROVÁNÍ!
Nebezpečí zásahu elektrickým proudem.
Následkem mohou být těžká zranění a smrt.
Před zahájením prací vypněte všechny začleněné přístroje a komponenty a odpojte
▶
je od elektrické sítě.
Zajistěte všechny začleněné přístroje a komponenty proti opětovnému zapnutí.
▶
Po otevření přístroje se pomocí vhodného měřicího přístroje ujistěte, že součásti,
▶
které mohou mít elektrický náboj (např. kondenzátory), jsou vybité.
VAROVÁNÍ!
Nebezpečí zásahu elektrickým proudem v důsledku nedostatečného propojení s
ochranným vodičem.
Následkem mohou být těžká poranění a materiální škody.
Vždy používejte originální šrouby pláště v původním počtu.
▶
1
CS
79
Page 80

Odinstalace
5
rozhraní robota
1
Uvolněte kabelové příchytky
3
2
Závěrečné úkony
1
80
Page 81

Odinstalace sběrnicového modulu
1
2
1
2
3
3
1
2
Odinstalace
sběrnicového
modulu
1
3
2
CS
81
Page 82

82
Page 83

Obsah
Všeobecné informácie 84
Koncepcia zariadenia 84
Rozsah dodávky 84
Okolité podmienky 85
Technické údaje 85
Bezpečnosť 85
Prípojky a zobrazenia na rozhraní robota 86
Prípojky na rozhraní robota 86
LED diódy na doske rozhrania robota 87
LED diódy na diagnostiku napájania napätím 88
LED na diagnostiku sieťového spojenia 88
Konfigurácia rozhrania robota 89
Funkcia prepínača DIP na rozhraní robota 89
Konfigurácia šírky procesných údajov 89
Nastavenie uzlovej adresy pomocou prepínača DIP(príklad) 90
Montáž rozhrania robota 91
Bezpečnosť 91
Príprava 91
Montáž zbernicového modulu do rozhrania robota 94
Bezpečnosť 94
Montáž zbernicového modulu 94
Demontáž rozhrania robota 95
Bezpečnosť 95
Príprava 95
Demontáž rozhrania robota 96
Záverečné činnosti 96
Demontáž zbernicového modulu 97
Demontáž zbernicového modulu 97
SK
83
Page 84

Všeobecné informácie
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
(1)
(2)
(3)
Koncepcia zariadenia
Rozhranie robota slúži ako rozhranie robota medzi prúdovým zdrojom a štandardizovanými zbernicovými modulmi pre rôzne komunikačné protokoly. (napr. Profibus, ProfiNet, DeviceNet, CANopen atď.)
Montáž rozhrania robota do prúdového zdroja sa môže vykonať buď z výroby firmou Fronius alebo dodatočne príslušne vyškoleným odborným personálom.
(1) Riadenie robota
(2) Dátový kábel SpeedNet
Rozsah dodávky
(3) Rozhranie robota
(4) Prúdový zdroj
(5) Chladiace zariadenie
(6) Spojovacie hadicové vedenie
(7) Podávač drôtu
(8) Robot
(1) RI FB Inside/i
(2) Dátový kábel
, 4-pólový
(3) 4 sťahovacie pásky
(4) Tento návod na obsluhu
(bez ilustrácie)
84
Page 85

Okolité podmienky
POZOR!
Nebezpečenstvo v dôsledku nedovolených okolitých podmienok.
Následkom môžu byť vážne poškodenia zariadení.
Zariadenie skladujte a prevádzkujte len za okolitých podmienok uvedených ďalej.
▶
Teplotný rozsah okolitého vzduchu:
- pri prevádzke: -10 °C bis +40 °C (14 °F do 104 °F)
- pri preprave a skladovaní: -20 °C bis +55 °C (-4 °F bis 131 °F)
Relatívna vlhkosť vzduchu:
- do 50 % pri 40 °C (104 °F)
- do 90 % pri 20 °C (68 °F)
Okolitý vzduch: bez prachu, kyselín, koróznych plynov alebo substancií atď.
Nadmorská výška: do 2 000 m (6 500 ft).
Technické údaje
Bezpečnosť
Napájanie napätím interné (24 V)
Stupeň krytia IP 23
NEBEZPEČENSTVO!
Nebezpečenstvo v dôsledku nesprávneho ovládania a nesprávne vykonaných
prác.
Následkom môžu byť vážne poranenia osôb alebo materiálne škody.
Všetky práce a funkcie opísané v tomto dokumente smie vykonávať iba odborne
▶
vyškolený personál.
Prečítajte si tento dokument tak, aby ste mu porozumeli.
▶
Prečítajte si všetky návody na obsluhu systémových komponentov, najmä
▶
bezpečnostné predpisy, tak, aby ste im porozumeli.
NEBEZPEČENSTVO!
Nebezpečenstvo v dôsledku neplánovaného prenosu signálu.
Následkom môžu byť vážne poranenia osôb alebo materiálne škody.
Neprenášajte prostredníctvom rozhrania žiadne signály, od ktorých závisí
▶
bezpečnosť.
SK
85
Page 86

Prípojky a zobrazenia na rozhraní robota
(2) (3)
(1)
Prípojky na
rozhraní robota
(1) Prípojka prúdového napájania
, 2-pólová
(2) Prípojka dátového kábla Speed-
Net
, 4-pólového
(3) Prípojka zbernicového modulu
86
Page 87

LED diódy na
(2)
(1)
(7)
(4)
(3)
(5)
(6)
(8)
doske rozhrania
robota
(1) LED ETH1 zelená Na diagnostiku sieťového pripojenia.
Podrobnosti nájdete v nasledujúcej časti
(2) LED ETH2
oranžov
á
„LED diódy na diagnostiku sieťového pripojenia“
SK
(3) LED 3 zelená
žiadna funkcia
(4) LED 4 zelená
- bliká frekvenciou 4 Hz = žiadne pripojenie k SpeedNet
(5) LED 5 zelená
- bliká frekvenciou 20 Hz = nadväzuje
sa pripojenie k SpeedNet
- bliká frekvenciou 1 Hz = pripojenie
k SpeedNet je vytvorené
svieti pri internej chybe.
(6) LED 6 červená
Odstránenie chyby: Reštartujte rozhranie
robota. Ak to neprinesie zlepšenie, upovedomte servisnú službu.
(7) LED +3V3 zelená Na diagnostiku napájania napätím.
Podrobnosti nájdete v nasledujúcej časti
(8) LED +24V zelená
„LED diódy na diagnostiku napájania
napätím“
87
Page 88

LED diódy na diagnostiku
napájania
napätím
LED Zobraze-
nie
Vyp.
+24 V
Význam Príčina
- Neexistuje prúdové
Pre rozhranie nie je k dispozícii napájacie napätie
napájanie pre rozhranie
robota
- Chybný kábel prúdového
napájania
LED na diagnostiku sieťového
spojenia
Svieti
Vyp.
+3V3
Svieti
LED Zobraze-
nie
VYP Chýba sieťové spojenie
ETH1
Svieti Sieťové spojenie k dispozícii
Bliká Prenos dát aktívny
VYP Prenosová rýchlosť 10 Mbit/s
ETH2
Svieti Prenosová rýchlosť 100 Mbit/s
Napájacie napätie na rozhraní
robota je 24 VDC
Na rozhraní robota nie je
žiadne prevádzkové napätie
Napájacie napätie na rozhraní
robota je 3 VDC
Význam Príčina
- Napájacie napätie 24
VDC nie je k dispozícii
- Chybný napájací zdroj
na rozhraní robota
- Sieťové spojenie pre
rozhranie nevytvorené
- Chybný sieťový kábel
88
Page 89

Konfigurácia rozhrania robota
Funkcia
prepínača DIP na
rozhraní robota
Prepínač‑DIP na rozhraní robota slúži na
nastavenie:
- šírky procesných dát
- adresy uzla/IP adresy
Z výroby sú všetky pozície prepínača DIP
v polohe OFF (VYP). To zodpovedá
binárnej hodnote 0.
UPOZORNENIE!
Riziko v dôsledku neplatných nastavení prepínača DIP.
Následkom môžu byť poruchy funkčnosti.
Po každej zmene nastavení prepínača DIP reštartujte rozhranie. Len vtedy budú
▶
nastavenia platné.
Reštartovanie rozhrania = prerušenie a obnovenie napájania alebo vykonanie
▶
príslušnej funkcie na webovej stránke prúdového zdroja (SmartManager).
SK
Konfigurácia
šírky procesných
údajov
Prepínač DIP
8 7 6 5 4 3 2 1 Konfigurácia
OFF OFF – – – – – –
OFF ON – – – – – –
ON OFF – – – – – –
ON ON – – – – – – Nie je použité
Šírkou procesných údajov sa definuje rozsah prenášaného množstva údajov.
To, aké veľké množstvo sa dá preniesť, závisí od:
- riadiacej jednotky robota,
- počtu prúdových zdrojov,
- druhu prúdových zdrojov,
• „inteligentná revolúcia“,
• „Digital Revolution“ (Retro Fit).
rozsah závislý od zbernicového modulu
Standard Image
320 bit
Economy Image
128 bit
Retro Fit
89
Page 90

Nastavenie
uzlovej adresy
pomocou
prepínača DIP
(príklad)
Prepínač DIP
8 7 6 5 4 3 2 1 Uzlová adresa
- - VYP VYP VYP VYP VYP ZAP 1
- - VYP VYP VYP VYP ZAP VYP 2
- - VYP VYP VYP VYP ZAP ZAP 3
- - ZAP ZAP ZAP ZAP ZAP VYP 62
- - ZAP ZAP ZAP ZAP ZAP ZAP 63
Uzlová adresa sa nastavuje pozíciami 1 až 6 prepínača DIP.
Nastavenie sa vykonáva v dvojkovom formáte. Vyplýva z toho nastavovací rozsah od 1
do 63 v desiatkovom formáte.
UPOZORNENIE!
Po každej zmene nastavení prepínača DIP sa musí vykonať reštart rozhrania, aby
boli zmeny
účinné.
(reštart = prerušenie a opätovné obnovenie napájania napätím)
alebo vykonanie zodpovedajúcej funkcie na webovej lokalite prúdového zdroja)
90
Page 91

Montáž rozhrania robota
Bezpečnosť
Príprava
NEBEZPEČENSTVO!
Nebezpečenstvo zásahu elektrickým prúdom.
Následkom môžu byť vážne poranenia a smrť.
Pred začiatkom prác vypnite všetky používané zariadenia a komponenty a odpojte
▶
ich od elektrickej siete.
Všetky používané zariadenia a komponenty zaistite proti opätovnému zapnutiu.
▶
Po otvorení zariadenia pomocou vhodného meracieho prístroja sa uistite, že elektri-
▶
cky nabité konštrukčné diely (napr. kondenzátory) sú vybité.
NEBEZPEČENSTVO!
Nebezpečenstvo zásahu elektrickým prúdom v dôsledku nedostatočného pripojenia ochranného vodiča.
Následkom môžu byť vážne poranenia osôb alebo materiálne škody.
Používajte vždy originálne skrutky od krytu, v pôvodnom počte.
▶
1 2
SK
3
4
Odstráňte sťahovaciu pásku z kábla napájania
91
Page 92

5
6
Vyveďte kábel napájania z prúdového zdroja
7
Vyveďte dátový kábel z prúdového zdroja
9 10
Pripojte a položte dátový kábel
8
Zaistite dátový kábel sťahovacími páskami
92
Page 93

11 12
SK
93
Page 94

Montáž zbernicového modulu do rozhrania robota
Bezpečnosť
Montáž zbernicového modulu
NEBEZPEČENSTVO!
Nebezpečenstvo zásahu elektrickým prúdom.
Následkom môžu byť vážne poranenia alebo smrť.
Pred začiatkom prác vypnite všetky používané zariadenia a komponenty a odpojte
▶
ich od elektrickej siete.
Všetky používané zariadenia a komponenty zaistite proti opätovnému zapnutiu.
▶
NEBEZPEČENSTVO!
Nebezpečenstvo zásahu elektrickým prúdom v dôsledku nedostatočného pripojenia ochranného vodiča.
Následkom môžu byť vážne poranenia osôb alebo materiálne škody.
Používajte vždy originálne skrutky od krytu, v pôvodnom počte.
▶
1 2
94
3
Page 95

Demontáž rozhrania robota
Bezpečnosť
Príprava
NEBEZPEČENSTVO!
Nebezpečenstvo zásahu elektrickým prúdom.
Následkom môžu byť vážne poranenia a smrť.
Pred začiatkom prác vypnite všetky používané zariadenia a komponenty a odpojte
▶
ich od elektrickej siete.
Všetky používané zariadenia a komponenty zaistite proti opätovnému zapnutiu.
▶
Po otvorení zariadenia pomocou vhodného meracieho prístroja sa uistite, že elektri-
▶
cky nabité konštrukčné diely (napr. kondenzátory) sú vybité.
NEBEZPEČENSTVO!
Nebezpečenstvo zásahu elektrickým prúdom v dôsledku nedostatočného pripojenia ochranného vodiča.
Následkom môžu byť vážne poranenia osôb alebo materiálne škody.
Používajte vždy originálne skrutky od krytu, v pôvodnom počte.
▶
1
SK
95
Page 96

Demontáž rozhra-
5
nia robota
1
Uvoľnite sťahovacie pásky
3
2
Záverečné
činnosti
1
96
Page 97

Demontáž zbernicového modulu
1
2
1
2
3
3
1
2
Demontáž zbernicového modulu
1
3
2
SK
97
Page 98

98
Page 99

SK
99
Page 100

FRONIUS INTERNATIONAL GMBH
Froniusstraße 1
A-4643 Pettenbach
AUSTRIA
contact@fronius.com
www.fronius.com
Under www.fronius.com/contact you will find the addresses
of all Fronius Sales & Service Partners and locations
 Loading...
Loading...