

Page 1

Operating
Instructions
RI FB/i IGM V1.0
RI MOD/i CC EtherCAT
RI MOD/i CC DeviceNet
Bedienungsanleitung
DE
42,0426,0236,DE 022-13092022
Page 2

Page 3

Inhaltsverzeichnis
Allgemeines 5
Sicherheit 5
Gerätekonzept 5
Blockschaltbild 6
Lieferumfang 6
Erforderliche Werkzeuge und Hilfsmittel 6
Montagebestimmungen 6
Anschlüsse und Anzeigen am Roboter-Interface 7
Anschlüsse am Roboter-Interface 7
LEDs am Print des Roboter-Interfaces 7
LEDs zur Diagnose der Spannugsversorgung 8
LEDs zur Diagnose der Netzwerk-Verbindung 9
Anschlüsse und Anzeigen am Busmodul - EtherCAT 10
Anschlüsse und Anzeigen 10
Anschlüsse und Anzeigen am Busmodul - DeviceNet 12
Anschlüsse und Anzeigen 12
Technische Daten EtherCAT 13
Umgebungsbedingungen 13
Technische Daten Roboter-Interface 13
Eigenschaften der Datenübertragung 13
Konfigurationsparameter 13
Technische Daten DeviceNet 15
Umgebungsbedingungen 15
Technische Daten Roboter-Interface 15
Eigenschaften der Datenübertragung 15
Konfigurationsparameter 15
Roboter-Interface konfigurieren - EtherCAT 17
Funktion des DIP-Schalters am Interface 17
Prozessdaten-Breite einstellen 17
Vergabe der EtherCat-Adresse 18
Roboter-Interface konfigurieren - DeviceNet 19
Funktion des DIP-Schalters am Interface 19
Prozessdaten-Breite einstellen 19
Knotenadresse einstellen mit DIP-Schalter(Beispiel) 20
Knotenadresse einstellen 21
Die Webseite der Stromquelle 21
SmartManager der Stromquelle aufrufen und anmelden 21
Roboter-Interface einbauen 22
Sicherheit 22
Vorbereitung 22
Datenkabel verlegen 23
Roboter-Interface einbauen 24
Abschließende Tätigkeiten 24
Busmodul einbauen 25
Sicherheit 25
Busmodul einbauen 25
Ein- und Ausgangssignale Standard Image IGM V1.0 - EtherCat 26
Datentypen 26
Verfügbarkeit der Eingangssignale 26
Eingangssignale (vom Roboter zur Stromquelle) 26
Wertebereich Working mode 33
Wertebereich TWIN mode 34
Wertebereich Documentation mode 34
Wertebereich Process controlled correction 34
Wertebereich Cooling unit operating mode 34
Wertebereich Process controlled correction 2 35
Verfügbarkeit der Ausgangssignale 36
Ausgangssignale (von der Stromquelle zum Roboter) 36
Zuordnung Sensorstatus 1-4 41
Wertebereich Function status 41
DE
3
Page 4

Wertebereich Safety status 42
Wertebereich Process Bit 42
Ein- und Ausgangssignale - DeviceNet 43
Datentypen 43
Verfügbarkeit der Eingangssignale 43
Eingangssignale (vom Roboter zur Stromquelle) 43
Wertebereich Working mode 48
Wertebereich Processline selection 48
Wertebereich TWIN mode 49
Wertebereich Documentation mode 49
Wertebereich Process controlled correction 49
Verfügbarkeit der Ausgangssignale 50
Ausgangssignale (von der Stromquelle zum Roboter) 50
Zuordnung Sensorstatus 1-4 53
Wertebereich Safety status 53
Wertebereich Process Bit 54
4
Page 5

Allgemeines
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
DE
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen
▶
nur von technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses
▶
Gerätes und aller Systemkomponenten lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Personen- und Sachschäden können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und vom Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
WARNUNG!
Gefahr durch unplanmäßige Signalübertragung.
Schwere Personen- und Sachschäden können die Folge sein.
Über das Interface keine sicherheitsrelevanten Signale übertragen.
▶
Gerätekonzept Das Roboter-Interface dient als Schnittstelle zwischen der Stromquelle und
standardisierten Busmodulen für verschiedenste Kommunikationsprotokolle.
Der Einbau des Roboter-Interface in die Stromquelle kann entweder bereits
werkseitig durch Fronius oder nachträglich durch entsprechend geschultes Fachpersonal erfolgen.
(1) Roboter-Steuerung
(2) Datenkabel SpeedNet
(3) Roboter-Interface
5
Page 6

Blockschaltbild
Spider NT241
RI FB/i IGM V1.0
Data
24 V
Module
(1)
(2)
(3)
(4) Stromquelle
(5) Kühlgerät
(6) Verbindungs-Schlauchpaket
(7) Drahtvorschub
(8) Roboter
Lieferumfang
Erforderliche
Werkzeuge und
Hilfsmittel
Schraubendreher TX8
-
Schraubendreher TX20
-
Schraubendreher TX25
-
Seitenschneider
-
(1) RI FB/i IGM V1.0
(2) Datenkabel
4-polig
(3) Kabelbinder
(4) Diese Bedienungsanleitung
(ohne Abbildung)
Montagebestimmungen
Das Roboter-Interface darf nur in die dafür vorgesehene Öffnung an der Rückseite der Stromquelle eingebaut werden.
6
Page 7

Anschlüsse und Anzeigen am Roboter-Interface
(2) (3)
(1)
(14)
(13)
(12)
(11)
(2)
(1)
(9)
(10)
(8)
(7)
(3) (4)
(5) (6)
DE
Anschlüsse am
Roboter-Interface
LEDs am Print
des Roboter-Interfaces
(1) Anschluss Stromversorgung
2-polig
(2) Anschluss Datenkabel Speed-
Net
4-polig
(3) Anschluss Busmodul
(1) LED ETH1 grün Zur Diagnose der Netzwerk-Verbin-
dung.
(2) LED ETH2 orange
Datails siehe nachfolgender Abschnitt
"LEDs zur Diagnose der Netzwerk-Verbindung“
7
Page 8

(3) LED 3 grün
(4) LED 4 grün
(5) LED 5 grün
(6) LED 6 rot
(7) LED +3V3 grün Zur Diagnose der Spannungsversor-
(8) LED +24V grün
keine Funktion
blinkt mit 4 Hz = keine Verbindung
-
zum SpeedNet
blinkt mit 20 Hz = Verbindung
-
zum SpeedNet wird hergestellt
blinkt mit 1 Hz = Verbindung zum
-
SpeedNet hergestellt
leuchtet bei internem Fehler.
Fehlerbehebung: Roboter-Interface
neu starten. Bringt dies keine Besserung, den Servicedienst verständigen.
gung.
Datails siehe nachfolgender Abschnitt
"LEDs zur Diagnose der Spannugsversorgung“
LEDs zur Diagnose der Spannugsversorgung
(9) LED DIG OUT 2 grün
(10) LED DIG OUT 1 grün
(11) LED 11 grün
(12) LED 12 grün
(13) LED 13 grün
(14) LED 14 grün
LED Anzeige Bedeutung Ursache
Aus
+24V
Leuchtet
Keine Versorgungsspannung
für das Interface vorhanden
24 VDC Versorgungsspannung am Roboter-Interface
vorhanden
Digitaler Ausgang 2. LED leuchtet,
wenn aktiv
Digitaler Ausgang 1. LED leuchtet,
wenn aktiv
keine Funktion
Stromversorgung für
-
das Roboter-Interface
nicht hergestellt
Stromversorgungs-Ka-
-
bel defekt
24 VDC Versorgungs-
-
Keine Betriebsspannung am
Aus
+3V3
Leuchtet
8
Roboter-Interface vorhanden
3 VDC Betriebsspannung
am Roboter-Interface vorhanden
spannung nicht vorhanden
Netzteil am Roboter-In-
-
terface defekt
Page 9

LEDs zur Diagnose der Netzwerk-Verbindung
LED Anzeige Bedeutung Ursache
Netzwerkverbindung
-
ETH1
Aus
Leuchtet
blinkt Datenübertragung aktiv
Keine Netzwerk-Verbindung
vorhanden
Netzwerk-Verbindung vorhanden
für das Interface nicht
hergestellt
Netzwerk-Kabel defekt
-
DE
ETH2
Aus
Leuchtet
Übertragungsgeschwindigkeit 10 Mbit/s
Übertragungsgeschwindigkeit 100 Mbit/s
9
Page 10

Anschlüsse und Anzeigen am Busmodul - Ether-
(12)(11)(10)
(14)(13)
(9)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
CAT
Anschlüsse und
Anzeigen
(1) TX+
(2) TX-
(3) RX+
(6) RX-
(4),
Normalerweise nicht verwen-
(5)
det; um die Signalvollständigkeit sicherzustellen, sind diese
Pins miteinander verbunden
und enden über einen Filterkreis am Schutzleiter (PE).
(7),
Normalerweise nicht verwen-
(8)
det; um die Signalvollständigkeit sicherzustellen, sind diese
Pins miteinander verbunden
und enden über einen Filterkreis am Schutzleiter (PE).
(9) LED Verbindung / Aktivität - EtherCAT-Ausgang
(10) LED ERR (Fehler)
(11) EtherCAT-Ausgang
(12) EtherCAT-Eingang
(13) LED Verbindung / Aktivität - EtherCAT-Eingang
(14) LED RUN (Betrieb)
LED RUN (Betrieb)
Diese Anzeige gibt den Status der CoE Kommunikation wieder.
(CoE = CANopen over EtherCAT)
Status Bedeutung
Aus EtherCAT Gerät im Status ‘init’ (oder keine Versor-
gungsspannung)
Leuchtet grün EtherCAT Gerät im Status ‘operational’
Blinkt grün EtherCAT Gerät im Status ‘pre-operational’
Blinkt grün (kurz) EtherCAT Gerät im Status ‘safe-operational’
Leuchtet rot Wenn die LED Run und die LED Error rot leuchten zeigt
LED ERR (Fehler)
das ein schwerwiegendes Ereignis an, welches das Interface in einen Ausnahmezustand bringt. Ser-
vicedienst kontaktieren
10
Status Bedeutung
Aus keine Fehler (oder keine Versorgungsspannung)
Page 11

LED ERR (Fehler)
Status Bedeutung
Blinkt rot falsche Konfiguartion
Vom Master empfangener Statuswechsel ist nicht
möglich wegen ungültiger Register- oder Objekteinstellungen.
Blinkt rot (doppelt) Application watchdog timeout
Sync manager watchdog timeout
Leuchtet rot Application controller failure
Anybus Modul in EXCEPTION
LED Verbindung / Aktivität
Status Meaning
Aus Keine Verbindung (oder keine Versorgungsspannung)
Leuchtet grün Verbindung erkannt, keine Aktivität vorhanden
Flackert grün Verbindung erkannt, Aktivität vorhanden
DE
11
Page 12

Anschlüsse und Anzeigen am Busmodul - Device-
(1)
(2)
(3)
(4)
(5)
(6)
(7)
Net
Anschlüsse und
Anzeigen
Pin Signal Beschreibung
(1) V - Versorgungsspannung
(2) CAN_LCAN low bus line
(3) SHIELDKabel-Abschirmung
(4) CAN_HCAN high bus line
(5) V + Versorgungsspannung
Anzeigen
(6) LED MS (Modulstatus)
(7) LED NS (Netzwerkstatus)
LED MS (Modulstatus)
Status Bedeutung
Aus Keine Versorgungsspannung
Leuchtet grün Normalbetrieb
Blinkt grün Fehlende oder unvollständige Konfiguration, Inbetrieb-
nahme erforderlich
Leuchtet rot nicht behebbarer Fehler
Blinkt rot behebbarer Fehler
Abwechselnd rot /
grün
LED NS (Netzwerkstatus)
Status Bedeutung
Aus Nicht online oder keine Versorgungsspannung
Leuchtet grün Online, eine oder mehrere Verbindungen hergestellt
Blinkt grün Online, keine Verbindungen hergestellt
Leuchtet rot kritischer Verbindungsfehler
Blinkt rot Zeitüberlauf bei einer oder mehreren Verbindungen
Abwechselnd rot /
grün
Selbsttest läuft
Selbsttest läuft
12
Page 13

Technische Daten EtherCAT
DE
Umgebungsbedingungen
Technische Daten Roboter-Interface
VORSICHT!
Gefahr durch unzulässige Umgebungsbedingungen.
Schwere Geräteschäden können die Folge sein.
Das Gerät nur bei den nachfolgend angegebenen Umgebungsbedingungen
▶
lagern und betreiben.
Temperaturbereich der Umgebungsluft:
beim Betrieb: -10 °C bis +40 °C (14 °F bis 104 °F)
-
bei Transport und Lagerung: -20 °C bis +55 °C (-4 °F bis 131 °F)
-
Relative Luftfeuchtigkeit:
bis 50 % bei 40 °C (104 °F)
-
bis 90 % bei 20 °C (68 °F)
-
Umgebungsluft: frei von Staub, Säuren, korrosiven Gasen oder Substanzen,
usw.
Höhenlage über dem Meeresspiegel: bis 2000 m (6500 ft).
Spannungsversorgung intern (24 V)
Schutzart IP 23
Eigenschaften
der Datenübertragung
Konfigurationsparameter
Übertragungstechnik:
EtherCAT
Medium:
Bei der Auswahl der Kabel, Stecker und Abschluss-Widerstände ist die
IEC 61784‑5‑12 für die Planung und Installation von EtherCAT Systemen zu
beachten.
Seitens Hersteller wurden die EMV-Tests mit einem original Beckhoff-Kabel
(ZK1090-9191-xxxx) durchgeführt.
Übertragungs-Geschwindigkeit:
100 Mbit/s
Busanschluss:
RJ-45 Ethernet
Application Layer:
CANopen
Bei einigen Robotersteuerungen kann es erforderlich sein die hier beschriebenen
Konfigurationsparameter anzugeben, damit das Busmodul mit dem Roboter
kommunizieren kann.
13
Page 14

Parameter Wert Beschreibung
Vendor ID 0000 02C1
Product Code 0001 0341
(66369
dez
)
hex
hex
(705
dez
Device Name Fronius FB-IGM-1-0-
EtherCAT
) Fronius International GmbH
Standard Image
Fronius-FB-Inside-EtherCAT
14
Page 15

Technische Daten DeviceNet
DE
Umgebungsbedingungen
Technische Daten Roboter-Interface
VORSICHT!
Gefahr durch unzulässige Umgebungsbedingungen.
Schwere Geräteschäden können die Folge sein.
Das Gerät nur bei den nachfolgend angegebenen Umgebungsbedingungen
▶
lagern und betreiben.
Temperaturbereich der Umgebungsluft:
beim Betrieb: -10 °C bis +40 °C (14 °F bis 104 °F)
-
bei Transport und Lagerung: -20 °C bis +55 °C (-4 °F bis 131 °F)
-
Relative Luftfeuchtigkeit:
bis 50 % bei 40 °C (104 °F)
-
bis 90 % bei 20 °C (68 °F)
-
Umgebungsluft: frei von Staub, Säuren, korrosiven Gasen oder Substanzen,
usw.
Höhenlage über dem Meeresspiegel: bis 2000 m (6500 ft).
Spannungsversorgung intern (24 V)
Schutzart IP 23
Eigenschaften
der Datenübertragung
Konfigurationsparameter
Netzwerk Topologie
Linearer Bus, Busabschluss an beiden Enden (121 Ohm), Stichleitungen sind
möglich
Medium und maximale Buslänge
Bei der Auswahl der Kabel, Stecker und Abschluss-Widerstände ist die ODVA
Empfehlung für die Planung und Installation von DeviceNet Systemen zu beachten
Anzahl der Stationen
max. 64 Teilnehmer
Übertragungs-Geschwindigkeit
500 kBit/s, 250 kBit/s, 125 kBit/s
Prozessdaten-Breite
konfigurierbar am Roboter-Interface
siehe nachfolgenden Abschnitt „Roboter-Interface konfigurieren“
Bei einigen Robotersteuerungen kann es erforderlich sein die hier beschriebenen
Konfigurationsparameter anzugeben, damit das Busmodul mit dem Roboter
kommunizieren kann.
15
Page 16

Parameter Wert Beschreibung
Vendor ID 0534
Device Type 000C
Product Code 0440
hex
hex
hex
(1332
(12
dez
(1088
) Fronius International GmbH
dez
) Communication adapter
) Fronius FB IGM 1.0 DeviceNet
dez
Product Name Fronius FB-IGM-1-0-DeviceNet
16
Page 17

Roboter-Interface konfigurieren - EtherCAT
(1)
(2)
DE
Funktion des
DIP-Schalters
am Interface
Der DIP‑Schalter am Roboter-Inter-
face dient zur Einstellung des Prozess-Image (Standard-Image).
Werkseitige Einstellung des ProzessImage:
Position 7 und 8 des DIP-Schalters
in der Stellung OFF (1) = StandardImage = IGM V1.0
HINWEIS!
Riskio durch unwirksame DIP-Schalter-Einstellungen.
Funktionsstörungen können die Folge sein.
Nach jeder Änderung der DIP-Schalter-Einstellungen einen Neustart des In-
▶
terfaces durchführen. Nur dadurch werden die Einstellungen wirksam.
Neustart des Interfaces = Unterbrechen und Wiederherstellen der Span-
▶
nungsversorgung oder Ausführen der entsprechenden Funktion auf der
Webseite der Stromquelle (SmartManager).
ProzessdatenBreite einstellen
DIP-Schalter
8 7 6 5 4 3 2 1 Konfiguration
OFF OFF
OFF ON
ON OFF
ON ON
Über die Prozessdaten-Breite wird der Umfang der übertragenen Datenmenge
definiert.
Welche Datenmenge übertragen werden kann ist abhängig von
der Roboter-Steuerung
-
der Anzahl der Stromquellen
-
der Art der Stromquellen
-
-
-
- - - - - - IGM Image
832 Bit
- - - - - - Fronius Standard Image
320 Bit
- - - - - - Nicht verwendet
- - - - - - Nicht verwendet
„Intelligent Revolution“
„Digital Revolution“ (Retro Fit)
17
Page 18

Vergabe der
EtherCat-Adresse
Die EtherCat-Adresse wird vom Master vergeben.
18
Page 19

Roboter-Interface konfigurieren - DeviceNet
(1)
(2)
DE
Funktion des
DIP-Schalters
am Interface
Der DIP‑Schalter am Roboter-Interface dient zur Einstellung:
der Prozessdaten-Breite
-
der Knoteadresse
-
HINWEIS!
Riskio durch unwirksame DIP-Schalter-Einstellungen.
Funktionsstörungen können die Folge sein.
Nach jeder Änderung der DIP-Schalter-Einstellungen einen Neustart des In-
▶
terfaces durchführen. Nur dadurch werden die Einstellungen wirksam.
Neustart des Interfaces = Unterbrechen und Wiederherstellen der Span-
▶
nungsversorgung oder Ausführen der entsprechenden Funktion auf der
Webseite der Stromquelle (SmartManager).
ProzessdatenBreite einstellen
DIP-Schalter
8 7 6 5 4 3 2 1 Konfiguration
OFF OFF
OFF ON
ON OFF
ON ON
Über die Prozessdaten-Breite wird der Umfang der übertragenen Datenmenge
definiert.
Welche Datenmenge übertragen werden kann ist abhängig von
der Roboter-Steuerung
-
der Anzahl der Stromquellen
-
der Art der Stromquellen
-
-
-
- - - - - - Nicht verwendet
- - - - - - Fronius Standard Image
320 Bit
- - - - - - Nicht verwendet
- - - - - - Fronius Retro Fit Image
96 Bit
„Intelligent Revolution“
„Digital Revolution“ (Retro Fit)
19
Page 20

Knotenadresse
einstellen mit
DIP-Schalter
(Beispiel)
DIP-Schalter
8 7 6 5 4 3 2 1 Knotenadresse
- -
OFF OFF OFF OFF OFF ON
1
- -
- -
- -
- -
OFF OFF OFF OFF ON OFF
OFF OFF OFF OFF ON ON
ON ON ON ON ON OFF
ON ON ON ON ON ON
2
3
62
63
Die Knotenadresse wird mit den Positionen 1 bis 6 des DIP-Schalters eingestellt.
Die Einstellung erfolgt im Binärformat. Das ergibt einen Einstellbereich von 1 bis
63 im Dezimalformat.
20
Page 21

Knotenadresse
3
2
1
4
xx.x.xxx.x
1.9.0-16501.9508
einstellen
Bei Auslieferung ist die Knotenadresse 0 eingestellt.
Die Knotenadresse kann auf 2 Arten eingestellt werden:
Knotenadressen im Bereich von 1 bis 63 können mit dem DIP-Schalter einge-
-
stellt werden. In diesem Fall wird eine zuvor von einem Konfigurations-Tool
eingestellte Knotenadresse überschrieben.
Für nähere Infos zum DIP-Schalter siehe Funktion des DIP-Schalters
-
am Interface auf Seite 19.
Wurden bereits Einstellungen vorgenommen gibt es 2 Arten um alle NetzwerkEinstellungen auf Auslieferungszustand zurückzusetzen:
Alle DIP-Schalter wieder auf 0 setzen und Interface neu starten
-
oder
Mit dem Button Restore factory settings auf der Webseite der Stromquelle
-
(SmartManager)
DE
Die Webseite der
Stromquelle
SmartManager
der Stromquelle
aufrufen und anmelden
Die Stromquelle verfügt über eine eigene Webseite, den SmartManager.
Sobald die Stromquelle in einem Netzwerk integriert ist, kann der SmartManager
über die IP-Adresse der Stromquelle aufgerufen werden.
Abhängig von Anlagenkonfiguration und Software-Erweiterungen enthält der
SmartManager folgende Einträge:
Übersicht
-
Update
-
Screenshot
-
Sichern & Wiederherstellen
-
Funktionspakete
-
Job-Daten
-
Kennlinienübersicht
-
RI FB INSIDE/i
-
Voreinstellungen / System / Information ==> IP-Adresse der Stromquelle no-
1
tieren
IP-Adresse im Suchfeld des Browsers eingeben
2
Benutzername und Kennwort eingeben
3
Werkseinstellung:
Benutzername = admin
Kennwort = admin
Angezeigten Hinweis bestätigen
4
Der SmartManager der Stromquelle wird angezeigt.
21
Page 22

Roboter-Interface einbauen
Sicherheit
Vorbereitung
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und vom Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes si-
▶
cherstellen, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen sind.
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl ver-
▶
wenden.
1 2
22
3 4
Page 23

5
DE
Datenkabel verlegen
1 2
3
23
Page 24

Roboter-Interface einbauen
1 2
Abschließende
Tätigkeiten
1 2
24
Page 25

Busmodul einbauen
DE
Sicherheit
Busmodul einbauen
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen oder Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
WARNUNG!
Gefahr durch elektrischen Strom wegen unzureichender Schutzleiter-Verbindung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Immer die originalen Gehäuse-Schrauben in der ursprünglichen Anzahl ver-
▶
wenden.
1 2
3
25
Page 26
Ein- und Ausgangssignale Standard Image IGM
V1.0 - EtherCat
Datentypen Folgende Datentypen werden verwendet:
UINT16 (Unsigned Integer)
-
Ganzzahl im Bereich von 0 bis 65535
SINT16 (Signed Integer)
-
Ganzzahl im Bereich von -32768 bis 32767
Umrechnungsbeispiele:
für positiven Wert (SINT16)
-
z.B. gewünschter Drahtvorschub x Faktor
12.3 m/min x 100 = 1230
für negativen Wert (SINT16)
-
z.B. gewünschte Lichtbogen-Korrektur x Faktor
-6.4 x 10 = -64
= FFC0
dez
= 04CE
dez
hex
hex
Verfügbarkeit
der Eingangssignale
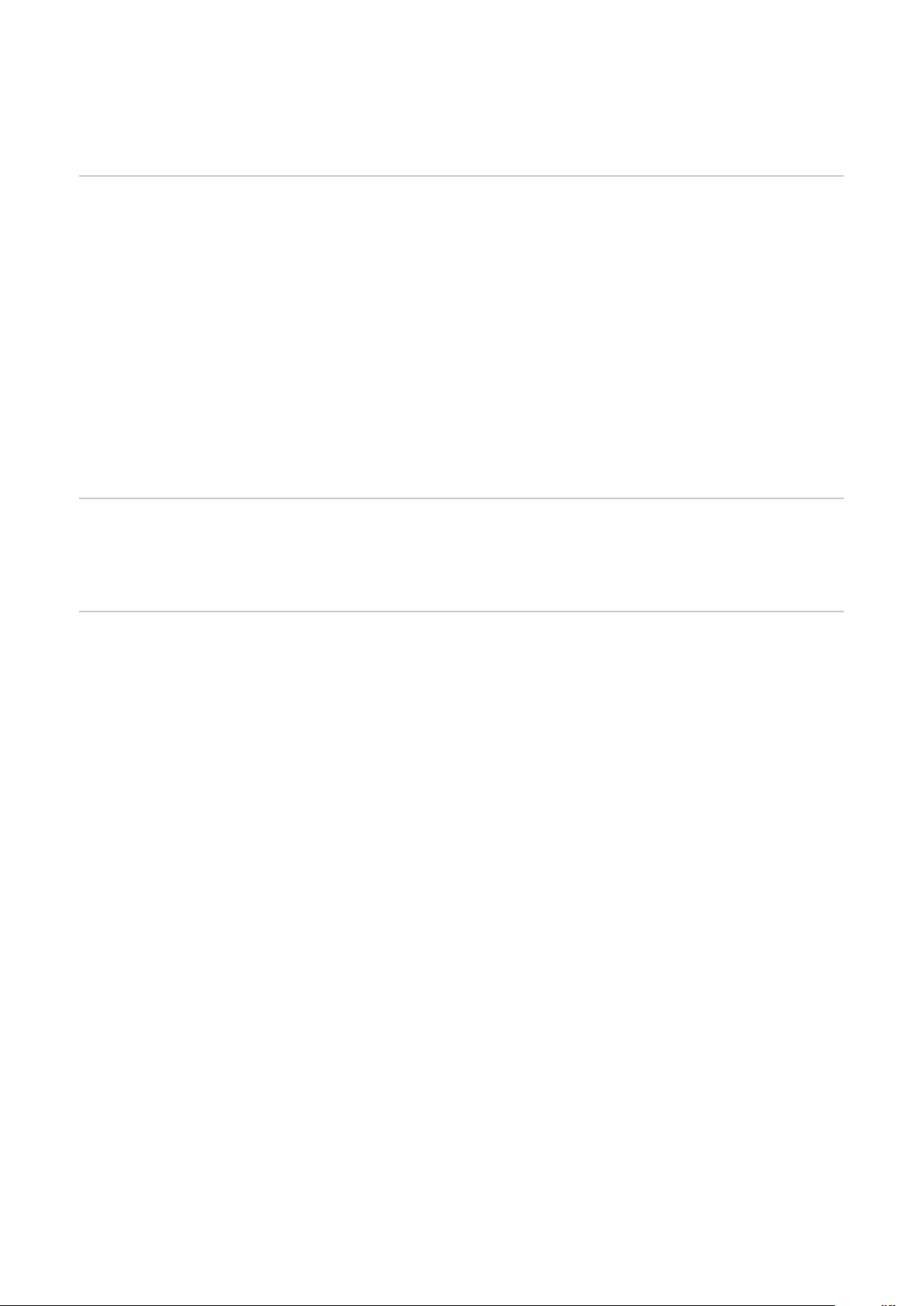
Eingangssignale
(vom Roboter
zur Stromquelle)
Die nachfolgend angeführten Eingangssignale sind ab Firmware V3.2.30 der
TPS/i-Stromquelle verfügbar.
26
Page 27

Adresse
relativ absolut
WORD
BYTE
0
0
1
BIT
0 0 Welding Start steigend
1 1 Robot ready High
2 2 Working mode Bit 0 High
3 3 Working mode Bit 1 High
4 4 Working mode Bit 2 High
5 5 Working mode Bit 3 High
6 6 Working mode Bit 4 High
7 7 —
0 8 Gas on steigend
1 9 Wire forward steigend
2 10 Wire backward steigend
3 11 Error quit steigend
4 12 Touch sensing High
BIT
Signal
Akti-
vität /
Datentyp Bereich
Siehe Tabelle Wertebe-
reich Working mode
auf Seite 33
DE
Faktor
5 13 Torch blow out steigend
6 14 Processline selection Bit 0 High
7 15 Processline selection Bit 1 High
0 16 Welding Simulation High
1 17 Synchro pulse on High
2 18 SFI on High
2
1
3
3 19 —
4 20 —
5 21 —
6 22 Wire brake on High
7 23 Torchbody Xchange High
0 24 —
1 25 Teach mode High
2 26 —
3 27 —
4 28 —
5 29 Wire sense start steigend
6 30 Wire sense break steigend
7 31 —
27
Page 28

Adresse
relativ absolut
BIT
WORD
BYTE
BIT
0 32 TWIN mode Bit 0 High Siehe Tabelle Wertebe-
1 33 TWIN mode Bit 1 High
2 34 —
3 35 —
Signal
Akti-
vität /
Datentyp Bereich
reich TWIN mode auf
Seite 34
Faktor
4
2
5
4 36 —
Siehe Tabelle Wertebe-
5 37 Documentation mode High
6 38 —
7 39 —
0 40 —
1 41 —
2 42 —
3 43 —
4 44 —
5 45 —
6 46 —
7 47
0 48 —
1 49 —
2 50 —
Disable process controlled correction
High
reich Documentation
mode auf Seite 34
6
3
7
8 0-7 64-71
4
9 0-7 72-79
3 51 —
4 52 —
5 53 —
6 54 —
7 55 —
0 56 ExtInput1 => OPT_Output 1 High
1 57 ExtInput2 => OPT_Output 2 High
2 58 ExtInput3 => OPT_Output 3 High
3 59 ExtInput4 => OPT_Output 4 High
4 60 ExtInput5 => OPT_Output 5 High
5 61 ExtInput6 => OPT_Output 6 High
6 62 ExtInput7 => OPT_Output 7 High
7 63 ExtInput8 => OPT_Output 8 High
Welding characteristic- / Job
number
UINT16 0 bis 1000 1
28
Page 29

Adresse
relativ absolut
WORD
BYTE
10,
5
11
BIT
0-7 80-95
BIT
Signal
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG Standard-Manuell,
MIG/MAG PMC,
MIG/MAG LSC,
CMT, ConstantWire:
Wire feed speed command value
Beim Job-Betrieb:
Power correction
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Akti-
vität /
Datentyp Bereich
-327,68 bis
SINT16
SINT16
SINT16
327,67
[m/min]
-20,00 bis 20,00
[%]
-10,0 bis 10,0
[Schritte]
DE
Faktor
100
100
10
Arclength correction
12,
6
14,
7
0-7 96-111
13
0-7 112-127
15
Beim Schweißverfahren
MIG/MAG Standard-Manuell:
Welding voltage
Beim Job-Betrieb:
Arclength correction
Beim Schweißverfahren ConstantWire:
Hotwire current
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Pulse-/dynamic correction
Beim Schweißverfahren
MIG/MAG Standard-Manuell:
Dynamic
UINT16
SINT16
UINT16
SINT16
UINT16
0,0 bis 6553,5
[V]
-10,0 bis 10,0
[Schritte]
0,0 bis 6553,5
[A]
-10,0 bis 10,0
[Schritte]
0,0 bis 10,0
[Schritte]
10
10
10
10
10
16 0-7 128-135
8
17 0-7 136-143
18 0-7 144-151
9
19 0-7 152-159
Wire retract correction UINT16 0,0 bis 10,0 10
Welding speed UINT 16
0 bis 1000
[cm/min]
10
29
Page 30
Adresse
relativ absolut
WORD
BYTE
20 0-7 160-167
10
21 0-7 168-175
22 0-7 176-183
11
23 0-7 184-191
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
BIT
BIT
Akti-
vität /
Signal
Process controlled correction
—
—
—
—
Datentyp Bereich
Siehe Tabelle Wertebe-
reich Process controlled correction auf Sei-
te 34
Faktor
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
OFF / 1 bis
Wire forward / backward length UINT16
Wire sense edge detection UINT16
—
—
Seam number UINT16 0 bis 65535 1
65535
[mm]
OFF / 0,5 bis 20
[mm]
10
1
30
Page 31

Adresse
relativ absolut
WORD
BYTE
40
20
41
BIT
0 320 Disable Start-End-Parameter High
1 321 Disable SFI-Parameter High
2 322 Disable SP-Parameter High
3 323 Disable Process-Mix-Parameter High
4 324 Disable gas-settings High
5 325 Disable delaytime flowsensor High
6 326 Disable inching value High
7 327
0 328 Enable TWIN-Parameter High
1 329 —
2 330 —
3 331 —
4 332 —
BIT
Signal
Disable process controlled correction 2
Akti-
vität /
Datentyp Bereich
High
DE
Faktor
21
42
43
5 333 —
6 334 —
7 335 —
0 336 Enable resistance overwrite High
1 337 Set resistance value High
2 338 Enable inductance overwrite High
3 339 Set inductance value High
4 340 —
5 341 —
6 342 —
7 343 —
0 344
1 345
2 346
3 347
Cooling unit operating mode
Bit 0
Cooling unit operating mode
Bit 1
Cooling unit operating mode
Bit 2
Pulse synchronization ratio Bit
0
High
Siehe Tabelle Wertebe-
High
High
High
reich Cooling unit ope-
rating mode auf Seite
34
4 348
5 349 —
6 350 —
7 351 —
Pulse synchronization ratio Bit
1
High
31
Page 32

Adresse
relativ absolut
WORD
BYTE
44 0-7 352-359
22
45 0-7 360-367
BIT
BIT
Akti-
vität /
Signal
Gas preflow UINT 16
Datentyp Bereich
0 bis 9,9
[s]
Faktor
10
46 0-7 368-375
23
47 0-7 376-383
48 0-7 384-391
24
49 0-7 392-399
50 0-7 400-407
25
51 0-7 408-415
52 0-7 416-423
26
53 0-7 424-431
54 0-7 432-439
27
55 0-7 440-447
56 0-7 448-455
28
57 0-7 456-463
58 0-7 464-471
29
59 0-7 472-479
60 0-7 480-487
30
61 0-7 488-495
Gas postflow UINT 16
Inching Value SINT 16
Delay time flow sensor UINT 16
Gas Command Value UINT 16
Gas factor UINT 16
Ignition time out UINT 16
S2T-Starting current UINT 16
S2T-Starting current time UINT 16
0 bis 60,0
[s]
0,5 bis 25
[m/min]
5 bis 25
[5er Schritte]
0,5 bis 30,0
[l/min]
0,9 bis 20,0
[l/min]
5 bis 100
[Schritte]
0 bis 200
[%]
Off (0,0) /
0,1 bis 10,0
[s]
10
100
1
10
100
1
1
10
62 0-7 496-503
31
63 0-7 504-511
64 0-7 512-519
32
65 0-7 520-527
66 0-7 528-535
33
67 0-7 536-543
68 0-7 544-551
34
69 0-7 552-559
70 0-7 560-567
35
71 0-7 568-575
72 0-7 576-583
36
73 0-7 584-591
74 0-7 592-599
37
75 0-7 600-607
76 0-7 608-615
38
77 0-7 616-623
S2T Slope 1 UINT 16
S2T Slope 2 UINT 16
S2T End current UINT 16
S2T End current time UINT 16
S2T Start Arclength correction SINT 16 -10 bis +10 10
S2T End Arclength correction SINT 16 -10 bis +10 10
SFI Hotstart UINT 16
SP Delta wire feed UINT 16 0,1 bis 6 10
0 bis 9,9
[s]
0 bis 9,9
[s]
0 bis 200
[%]
Off (0,0) /
0,1 bis 10,0
[s]
Off (0,0) /
0,01 bis 2,00
[s]
10
10
1
10
100
32
Page 33
Adresse
relativ absolut
WORD
BYTE
78 0-7 624-631
39
79 0-7 632-639
80 0-7 640-647
40
81 0-7 648-655
82 0-7 656-663
41
83 0-7 664-671
84 0-7 672-679
42
85 0-7 680-687
86 0-7 688-695
43
87 0-7 696-703
88 0-7 704-711
44
89 0-7 712-719
90 0-7 720-727
45
91 0-7 728-735
BIT
BIT
Akti-
vität /
Signal
SP Frequency UINT 16 0,5 bis 3 10
SP Duty Cycle UINT 16 10 bis 90 1
SP Arc length correction high SINT 16 -10 bis +10 10
SP Arc length correction low SINT 16 -10 bis +10 10
Process-Mix High power time
correction
Process-Mix Low power time
correction
Process-Mix Low power correction
Datentyp Bereich
SINT 16 -10 bis +10 10
SINT 16 -10 bis +10 10
SINT 16 -10 bis +10 10
DE
Faktor
92 0-7 736-743
46
93 0-7 744-751
94 0-7 752-759 Phase shift Lead/Trail UINT 8
47
95 0-7 760-767 Ignition delay Trail UINT 8
96 0-7 768-775
48
97 0-7 776-783
98 0-7 784-791
49
99 0-7 792-799
100 0-7 800-807
50
101 0-7 808-815
102 0-7 816-823
51
103 0-7 824-831
Process controlled correction 2
—
—
Resistance UINT 16
Inductance UINT 16
Siehe Tabelle Wertebe-
reich Process control-
led correction 2 auf
Seite 35
Auto / 0 bis 95
[%]
Auto / Off /
0,00 bis 2,00 [s]
0 bis +400
[mOhm]
0 bis +250
[Mikrohenry]
10
10
Wertebereich
Working mode
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 Parameteranwahl intern
0 0 0 0 1 Kennlinien Betrieb Sonder 2-Takt
0 0 0 1 0 Job Betrieb
0 1 0 0 0 Kennlinien Betrieb 2-Takt
33
Page 34

Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
1 1 0 0 0 R/L-Messung
1 1 0 0 1 R/L-Abgleich
Wertebereich Betriebsart
Wertebereich
TWIN mode
Wertebereich
Documentation
mode
Wertebereich
Process controlled correction
Bit 1 Bit 0 Beschreibung
0 0 TWIN Single mode
0 1 TWIN Lead mode
1 0 TWIN Trail mode
1 1 Reserve
Wertebereich TWIN-Betriebsart
Bit 0 Beschreibung
0 Nahtnummer von Stromquelle (intern)
1 Nahtnummer von Roboter (Word 19)
Wertebereich Dokumentationsmodus
Prozess
Signal
Aktivität /
Datentyp
PMC Arc length stabilizer SINT16
Wertebereich prozessabhängige Korrektur
Wertebereich
Einstellbereich
Einheit
-3276,8 bis +3276,7
0,0 bis +5,0 Volt 10
Faktor
Wertebereich
Cooling unit
operating mode
34
Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 auto
0 0 1 eco
0 1 0 on
0 0 0 of
Wertebereich Betriebsart Kühlgerät
Page 35

Wertebereich
Process controlled correction 2
Prozess
Signal
PMC Penetration stabilizer SINT16
Wertebereich prozessabhängige Korrektur 2
Aktivität /
Datentyp
Wertebereich
Einstellbereich
Einheit
-3276,8 bis
+3276,7
0,0 bis +10,0 m/min 10
DE
Faktor
35
Page 36

Verfügbarkeit
der Ausgangssignale
Ausgangssignale
(von der Stromquelle zum Roboter)
Adresse
relativ absolut
WORD
BYTE
BIT
0 0 Heartbeat Powersource
1 1 Power source ready High
2 2 Warning High
Die nachfolgend angeführten Ausgangssignale sind ab Firmware V3.2.30 der
TPS/i-Stromquelle verfügbar.
Akti-
BIT
Signal
vität /
Datentyp Bereich
High /
Low
1 Hz
Faktor
0
0
1
3 3 Process active High
4 4 Current flow High
5 5 Arc stable- / touch signal High
6 6 Main current signal High
7 7 Touch signal High
0 = Kollision
0 8 Collisionbox active Low
1 9 Robot Motion Release High
2 10 Wire stick workpiece High
3 11 —
4 12 Short circuit contact tip High
5 13 Parameter selection internally High
6 14 Characteristic number valid High
7 15 Torch body gripped High
oder Kabel-
bruch
36
Page 37
Adresse
relativ absolut
WORD
BYTE
2
1
3
BIT
0 16 Command value out of range High
1 17 Correction out of range High
2 18 —
3 19 Limit Signal High
4 20 —
5 21 —
6 22 Main supply status Low
7 23 —
0 24 Sensor status 1 High
1 25 Sensor status 2 High
2 26 Sensor status 3 High
3 27 Sensor status 4 High
4 28 —
BIT
Signal
Akti-
vität /
Datentyp Bereich
Siehe Tabelle Zuord-
nung Sensorstatus 1-4
auf Seite 41
DE
Faktor
5 29 —
6 30 —
7 31 —
0 32 Function status Bit 0 High Siehe Tabelle Wertebe-
1 33 Function status Bit 1 High
2 34 —
4
2
5
3 35 Safety status Bit 0 High Siehe Tabelle Wertebe-
4 36 Safety status Bit 1 High
5 37 —
6 38 Notification High
7 39 System not ready High
0 40 —
1 41 —
2 42 —
3 43 —
4 44 —
reich Function status
auf Seite 41
reich Safety status auf
Seite 42
5 45 —
6 46 —
7 47 —
37
Page 38

Adresse
relativ absolut
BIT
WORD
BYTE
BIT
0 48 Process Bit 0 High
Signal
Akti-
vität /
Datentyp Bereich
Faktor
6
3
7
8 0-7 64-71
4
9 0-7 72-79
1 49 Process Bit 1 High
2 50 Process Bit 2 High
3 51 Process Bit 3 High
4 52 Process Bit 4 High
5 53 —
6 54 Gas nozzle touched High
7 55 TWIN synchronisation active High
0 56 ExtOutput1 <= OPT_Input1 High
1 57 ExtOutput2 <= OPT_Input2 High
2 58 ExtOutput3 <= OPT_Input3 High
3 59 ExtOutput4 <= OPT_Input4 High
4 60 ExtOutput5 <= OPT_Input5 High
5 61 ExtOutput6 <= OPT_Input6 High
6 62 ExtOutput7 <= OPT_Input7 High
7 63 ExtOutput8 <= OPT_Input8 High
Welding voltage UINT16
Siehe Tabelle Wertebe-
reich Process Bit auf
Seite 42
0,0 bis 655,35
[V]
100
10 0-7 80-87
5
11 0-7 88-95
12 0-7 96-103
6
13 0-7 104-111
14 0-7 112-119
7
15 0-7 120-127
16 0-7 128-135
8
17 0-7 136-143
18 0-7 144-151
9
19 0-7 152-159
20 0-7 160-167
10
21 0-7 168-175
22 0-7 176-183
11
23 0-7 184-191
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
Welding current UINT16
Wire feed speed SINT16
Actual real value for seam
tracking
Error number UINT16 0 bis 65535 1
Warning number UINT16 0 bis 65535 1
Motor current M1 SINT16
Motor current M2 SINT16
Motor current M3 SINT16
—
UINT16 0 bis 6,5535
0,0 bis 6553,5
[A]
-327,68 bis
327,67 [m/min]
-327,68 bis
327,67 [A]
-327,68 bis
327,67 [A]
-327,68 bis
327,67 [A]
10
100
1000
100
100
100
0
38
Page 39

Adresse
relativ absolut
WORD
BYTE
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
BIT
0 320 Gas process line 1 pushed High
BIT
Akti-
vität /
Signal
—
—
Wire position SINT16
—
—
—
Datentyp Bereich
-327,68 bis
327,67 [A]
100
DE
Faktor
1 321 —
2 322 Wire feeder 1 available High
3 323 Wire feeder 2 available High
40
4 324 Wire feeder 3 available High
5 325 Gas controller available High
6 326 —
7 327 —
20
0 328 OPT/i Safety Stop available High
1 329 —
2 330 —
3 331 —
41
4 332 —
5 333 —
6 334 —
7 335 —
42 0-7 336-343
21
43 0-7 344-351
—
44 0-7 352-359
22
45 0-7 360-367
46 0-7 368-375
23
47 0-7 376-383
48 0-7 384-391
24
49 0-7 392-399
Cooler temperature SINT16
Cooler flow rate SINT16
Real energy actual value UINT16
-100 bis +200
[°C]
-100 bis +100
[l/min]
0 bis 6553,5
[kJ]
10
100
10
39
Page 40

Adresse
relativ absolut
WORD
BYTE
50 0-7 400-407
25
51 0-7 408-415
52 0-7 416-423
26
53 0-7 424-431
54 0-7 432-439
27
55 0-7 440-447
56 0-7 448-455
28
57 0-7 456-463
58 0-7 464-471
29
59 0-7 472-479
60 0-7 480-487
30
61 0-7 488-495
BIT
BIT
Akti-
vität /
Signal
Power value UINT16
Hour meter power on UINT32
Hour meter current flow UINT32
—
Datentyp Bereich
0 bis 6553,5
[kW]
0 bis 100000
[h]
0 bis 100000
[h]
10
10
10
Faktor
62 0-7 496-503
31
63 0-7 504-511
64 0-7 512-519
32
65 0-7 520-527
66 0-7 528-535
33
67 0-7 536-543
68 0-7 544-551
34
69 0-7 552-559
70 0-7 560-567
35
71 0-7 568-575
72 0-7 576-583
36
73 0-7 584-591
74 0-7 592-599
37
75 0-7 600-607
76 0-7 608-615
38
77 0-7 616-623
78 0-7 624-631
39
79 0-7 632-639
—
Real value welding voltage UINT16
Real value welding current UINT16
Real value wire feed speed SINT16
MIG gas real value UINT16 0,0 bis 100,0 10
Feeder inching speed SINT16
—
—
—
0,0 bis 655,35
[V]
0,0 bis 6553,5
[A]
-327,68 bis
327,67 [m/min]
-327,68 bis
327,67
100
10
100
100
40
80 0-7 640-647
40
81 0-7 648-655
82 0-7 656-663
41
83 0-7 664-671
84 0-7 672-679
42
85 0-7 680-687
—
—
—
Page 41

Adresse
relativ absolut
WORD
BYTE
BIT
86 0-7 688-695
43
87 0-7 696-703
88 0-7 704-711
44
89 0-7 712-719
90 0-7 720-727
45
91 0-7 728-735
92 0-7 736-743
46
93 0-7 744-751
94 0-7 752-759
47
95 0-7 760-767
96 0-7 768-775
48
97 0-7 776-783
98 0-7 784-791
49
99 0-7 792-799
BIT
Akti-
vität /
Signal
Datentyp Bereich
—
—
—
—
—
—
—
DE
Faktor
100 0-7 800-807
50
101 0-7 808-815
102 0-7 816-823
51
103 0-7 824-831
Zuordnung Sensorstatus 1-4
Wertebereich
Function status
Resistance UINT 16
Inductance UINT 16
0 bis +400
[mOhm]
0 bis +250
[Mikrohenry]
Signal Beschreibung
Sensor status 1 OPT/i WF R Drahtende (4,100,869)
Sensor status 2 OPT/i WF R Drahtfass (4,100,879)
Sensor status 3 OPT/i WF R Ringsensor (4,100,878)
Sensor status 4 Drahtpufferset CMT TPS/i (4,001,763)
Bit 1 Bit 0 Beschreibung
0 0 inactive
10
10
0 1 idle
1 0 finished
1 1 Error
Wertebereich Funktionsstatus
41
Page 42

Wertebereich
Safety status
Bit 1 Bit 0 Beschreibung
0 0 Reserve
0 1 Halt
1 0 Stopp
1 1 Nicht eingebaut / aktiv
Wertebereich
Process Bit
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 kein Prozess oder Parameteranwahl
intern
0 0 0 0 1 MIG/MAG Puls-Synerigc
0 0 0 1 0 MIG/MAG Standard-Synergic
0 0 0 1 1 MIG/MAG PMC
0 0 1 0 0 MIG/MAG LSC
0 0 1 0 1 MIG/MAG Standard-Manuell
0 0 1 1 0 Elektrode
0 0 1 1 1 WIG
0 1 0 0 0 CMT
0 1 0 0 1 ConstantWire
42
Page 43

Ein- und Ausgangssignale - DeviceNet
Datentypen Folgende Datentypen werden verwendet:
UINT16 (Unsigned Integer)
-
Ganzzahl im Bereich von 0 bis 65535
SINT16 (Signed Integer)
-
Ganzzahl im Bereich von -32768 bis 32767
Umrechnungsbeispiele:
für positiven Wert (SINT16)
-
z.B. gewünschter Drahtvorschub x Faktor
12.3 m/min x 100 = 1230
für negativen Wert (SINT16)
-
z.B. gewünschte Lichtbogen-Korrektur x Faktor
-6.4 x 10 = -64
= FFC0
dez
= 04CE
dez
hex
hex
DE
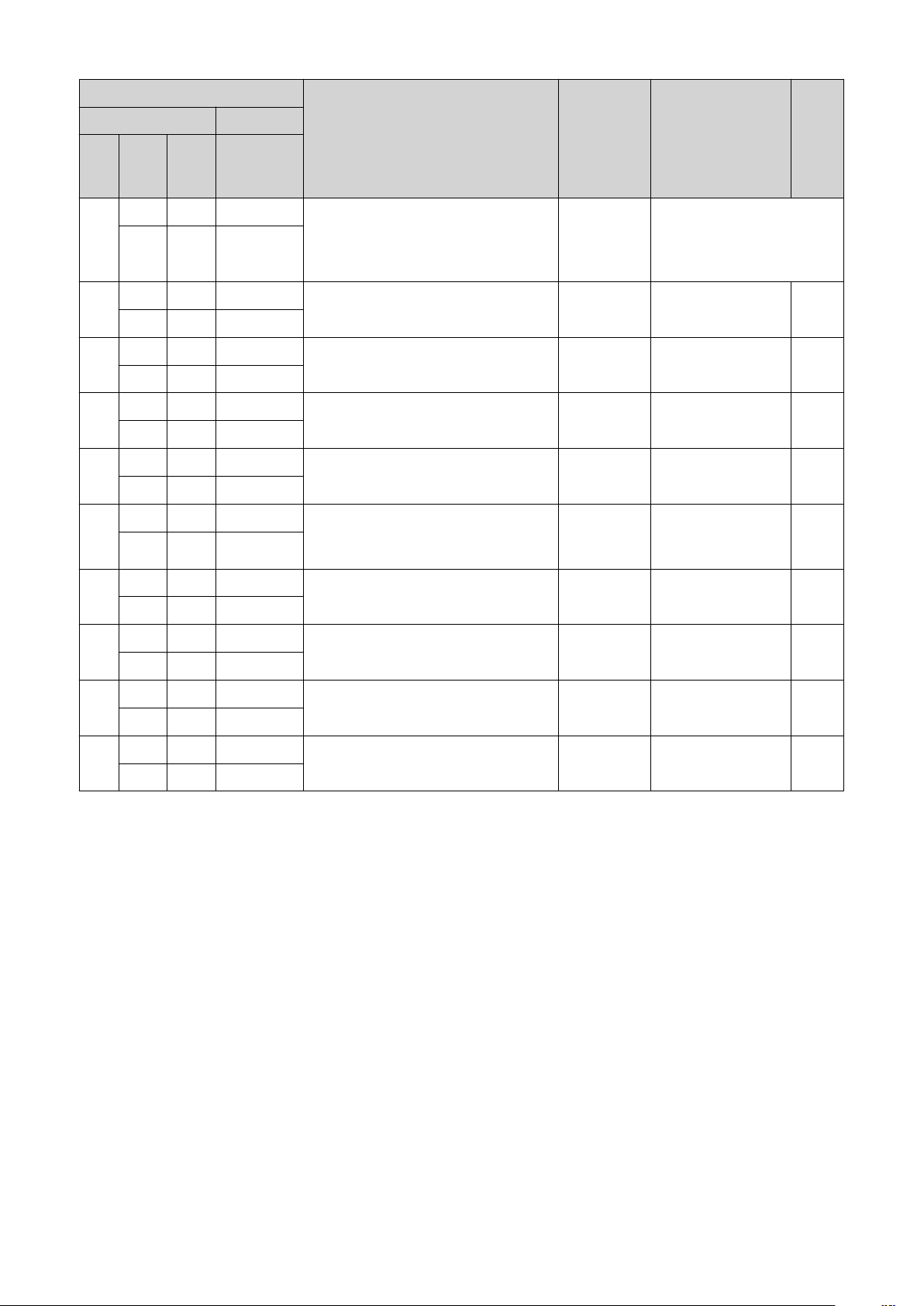
Verfügbarkeit
der Eingangssignale
Eingangssignale
(vom Roboter
zur Stromquelle)
Die nachfolgend angeführten Eingangssignale sind ab Firmware V3.2.30 der
TPS/i-Stromquelle verfügbar.
43
Page 44

Adresse
relativ absolut
Prozess-
Image
WORD
0
BIT
BIT
BYTE
0 0 Welding Start steigend
1 1 Robot ready High
2 2 Working mode Bit 0 High
3 3 Working mode Bit 1 High
0
4 4 Working mode Bit 2 High
5 5 Working mode Bit 3 High
6 6 Working mode Bit 4 High
7 7 —
0 8 Gas on steigend
1 9 Wire forward steigend
2 10 Wire backward steigend
3 11 Error quit steigend
4 12 Touch sensing High
1
5 13 Torch blow out steigend
6 14 Processline selection Bit 0 High Siehe Tabelle
7 15 Processline selection Bit 1 High
Signal
Aktivität /
Bereich
Datentyp
Wertebereich
Working mode
Wertebereich
Siehe Tabelle
auf Seite 48
Processline
selection auf
Seite 48
Faktor
Standard
ü ü
Economy
0 16 Welding Simulation High
1 17 Synchro pulse on High
2 18 —
3 19 —
2
4 20 —
5 21 —
6 22 Wire brake on High
1
7 23 Torchbody Xchange High
ü ü
0 24 —
1 25 Teach mode High
2 26 —
3 27 —
3
4 28 —
5 29 Wire sense start steigend
6 30 Wire sense break steigend
7 31 —
44
Page 45

Adresse
relativ absolut
Prozess-
Image
DE
WORD
2
BIT
BIT
BYTE
0 32 TWIN mode Bit 0 High Siehe Tabelle
1 33 TWIN mode Bit 1 High
2 34 —
3 35 —
4 36 —
4
5 37 Documentation mode High
6 38 —
7 39 —
0 40 —
1 41 —
2 42 —
3 43 —
5
4 44 —
Signal
Aktivität /
Bereich
Datentyp
Wertebereich
TWIN mode auf
Wertebereich
Documentation
mode auf Seite
Seite 49
Siehe Tabelle
49
Faktor
Standard
ü ü
Economy
5 45 —
6 46 —
7 47
Disable process controlled
correction
High
45
Page 46

Adresse
relativ absolut
Prozess-
Image
WORD
3
BIT
BIT
BYTE
0 48 —
1 49 —
2 50 —
3 51 —
6
4 52 —
5 53 —
6 54 —
7 55 —
0 56 ExtInput1 => OPT_Output 1 High
1 57 ExtInput2 => OPT_Output 2 High
2 58 ExtInput3 => OPT_Output 3 High
3 59 ExtInput4 => OPT_Output 4 High
7
4 60 ExtInput5 => OPT_Output 5 High
5 61 ExtInput6 => OPT_Output 6 High
6 62 ExtInput7 => OPT_Output 7 High
7 63 ExtInput8 => OPT_Output 8 High
Signal
Aktivität /
Datentyp
Bereich
Faktor
Standard
ü ü
Economy
8 0-7 64-71
4
9 0-7 72-79
10,
5
0-7 80-95
11
Welding characteristic- / Job
number
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG Standard-Manuell,
MIG/MAG PMC,
MIG/MAG LSC,
CMT, ConstantWire:
Wire feed speed command value
Beim Job-Betrieb:
Power correction
UINT16 0 bis 1000 1
-327,68
SINT16
SINT16
bis 327,67
[m/min]
-20,00 bis
20,00
[%]
100
100
ü ü
ü ü
46
Page 47

Adresse
relativ absolut
Prozess-
Image
DE
WORD
6
7
BYTE
12,
0-7 96-111
13
14,
0-7 112-127
15
BIT
BIT
Signal
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Arclength correction
Beim Schweißverfahren
MIG/MAG Standard-Manuell:
Welding voltage
Beim Job-Betrieb:
Arclength correction
Beim Schweißverfahren ConstantWire:
Hotwire current
Beim Schweißverfahren
MIG/MAG Puls-Synergic,
MIG/MAG Standard-Synergic,
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Pulse-/dynamic correction
Aktivität /
Datentyp
SINT16
UINT16
SINT16
UINT16
SINT16
Bereich
-10,0 bis
10,0
[Schritte]
0,0 bis
6553,5
[V]
-10,0 bis
10,0
[Schritte]
0,0 bis
6553,5
[A]
-10,0 bis
10,0
[Schritte]
10
10
10
10
10
Faktor
Standard
ü ü
ü ü
Economy
16 0-7 128-135
8
17 0-7 136-143
18 0-7 144-151
9
19 0-7 152-159
20 0-7 160-167
10
21 0-7 168-175
22 0-7 176-183
11
23 0-7 184-191
Beim Schweißverfahren
MIG/MAG Standard-Manuell:
Dynamic
Wire retract correction UINT16
Welding speed UINT16
Process controlled correction
—
UINT16
0,0 bis
10,0
[Schritte]
0,0 bis
10,0
[Schritte]
0,0 bis
1000,0
[cm/min]
Siehe Tabelle
Wertebereich
Process control-
led correction
auf Seite 49
10
10
10
ü
ü
ü
ü
47
Page 48
Adresse
relativ absolut
Prozess-
Image
WORD
BYTE
BIT
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
BIT
Signal
Aktivität /
Datentyp
Bereich
—
—
—
Wire forward / backward
length
UINT16
OFF / 1
bis 65535
[mm]
OFF / 0,5
Wire sense edge detection UINT16
bis 20,0
10
[mm]
—
—
Seam number UINT16
0 bis
65535
Faktor
Standard
Economy
ü
ü
ü
1
ü
ü
ü
ü
1
ü
Wertebereich
Working mode
Wertebereich
Processline
selection
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 Parameteranwahl intern
0 0 0 0 1 Kennlinien Betrieb Sonder 2-Takt
0 0 0 1 0 Job-Betrieb
0 1 0 0 0 Kennlinien Betrieb 2-Takt
0 1 0 0 1 MIG/MAG Standard-Manuell 2-Takt
1 0 0 0 1 Kühlmittel-Pumpe stoppen
Wertebereich Betriebsart
Bit 1 Bit 0 Beschreibung
0 0 Prozesslinie 1 (default)
0 1 Prozesslinie 2
1 0 Prozesslinie 3
1 1 Reserviert
Wertebereich Prozesslinien-Auswahl
48
Page 49

Wertebereich
TWIN mode
Bit 1 Bit 0 Beschreibung
0 0 TWIN Single mode
0 1 TWIN Lead mode
1 0 TWIN Trail mode
1 1 Reserve
Wertebereich TWIN-Betriebsart
DE
Wertebereich
Documentation
mode
Wertebereich
Process controlled correction
Bit 0 Beschreibung
0 Nahtnummer von Stromquelle (intern)
1 Nahtnummer von Roboter (Word 19)
Wertebereich Dokumentationsmodus
Prozess
Signal
Aktivität /
PMC Arc length stabilizer SINT16
Wertebereich prozessabhängige Korrektur
Wertebereich
Datentyp
Einstellbereich
-327,8 bis +327,7
0,0 bis +5,0 Volt 10
Einheit
Faktor
49
Page 50

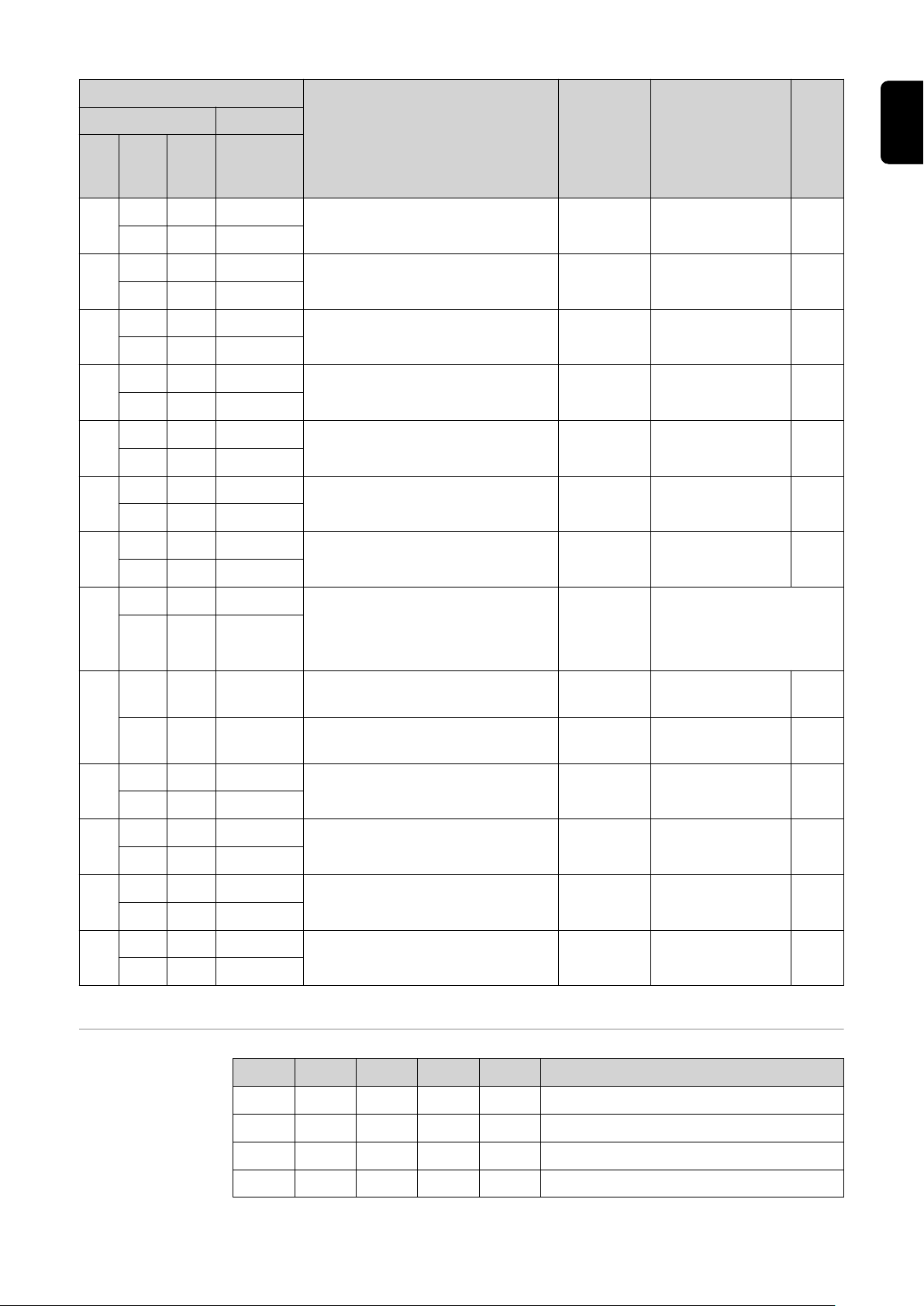
Verfügbarkeit
der Ausgangssignale
Ausgangssignale
(von der Stromquelle zum Roboter)
Adresse
relativ absolut
Die nachfolgend angeführten Ausgangssignale sind ab Firmware V3.2.30 der
TPS/i-Stromquelle verfügbar.
Prozess-
Image
WORD
0
BYTE
BIT
0 0 Heartbeat Powersource High/Low 1 Hz
1 1 Power source ready High
2 2 Warning High
3 3 Process active High
0
4 4 Current flow High
5 5 Arc stable- / touch signal High
6 6 Main current signal High
7 7 Touch signal High
0 8 Collisionbox active Low
1 9 Robot Motion Release High
2 10 Wire stick workpiece High
3 11 —
1
4 12 Short circuit contact tip High
5 13
BIT
Signal
Parameter selection internally
Aktivität /
Datentyp
High
Bereich
0 = Kollisi-
on oder
Kabel-
bruch
Standard
Faktor
ü ü
Economy
50
6 14
7 15 Torch body gripped High
Characteristic number
valid
High
Page 51

Adresse
relativ absolut
Prozess-
Image
DE
WORD
1
BYTE
BIT
0 16
1 17 Correction out of range High
2 18 —
3 19 Limitsignal High
2
4 20 —
5 21 —
6 22 Main supply status Low
7 23 —
0 24 Sensor status 1 High
1 25 Sensor status 2 High
2 26 Sensor status 3 High
3 27 Sensor status 4 High
3
4 28 —
5 29 —
6 30 —
BIT
Signal
Command value out of
range
Aktivität /
Datentyp
High
Bereich
Siehe Tabelle Zu-
ordnung Sensorsta-
tus 1-4 auf Seite
53
Faktor
Standard
ü ü
Economy
7 31 —
0 32 —
1 33 —
2 34 —
3 35 Safety status Bit 0 High Siehe Tabelle Wer-
4
4 36 Safety status Bit 1 High
5 37 —
6 38 Notification High
2
7 39 System not ready High
0 40 —
1 41 —
2 42 —
3 43 —
5
4 44 —
5 45 —
6 46 —
tebereich Safety
status auf Seite 53
ü ü
7 47 —
51
Page 52

Adresse
relativ absolut
Prozess-
Image
WORD
3
BYTE
BIT
0 48 Process Bit 0 High
1 49 Process Bit 1 High
2 50 Process Bit 2 High
3 51 Process Bit 3 High
6
4 52 Process Bit 4 High
5 53 —
6 54 Touch signal gas nozzle High
7 55
0 56
1 57
2 58
3 59
7
4 60
BIT
Signal
TWIN synchronization
active
ExtOutput1 <= OPT_Input1
ExtOutput2 <= OPT_Input2
ExtOutput3 <= OPT_Input3
ExtOutput4 <= OPT_Input4
ExtOutput5 <= OPT_Input5
Aktivität /
Datentyp
High
High
High
High
High
High
Bereich
Siehe Tabelle Wer-
tebereich Process
Bit auf Seite 54
Faktor
Standard
ü ü
Economy
5 61
6 62
7 63
8 0-7 64-71
4
9 0-7 72-79
10 0-7 80-87
5
11 0-7 88-95
12 0-7 96-103
6
13 0-7 104-111
14 0-7 112-119
7
15 0-7 120-127
16 0-7 128-135
8
17 0-7 136-143
18 0-7 144-151
9
19 0-7 152-159
ExtOutput6 <= OPT_Input6
ExtOutput7 <= OPT_Input7
ExtOutput8 <= OPT_Input8
Welding voltage UINT16
Welding current UINT16
Wire feed speed SINT16
Actual real value for
seam tracking
Error number UINT16
Warning number UINT16
High
High
High
UINT16
0,0 bis
655,35 [V]
0,0 bis
6553,5 [A]
-327,68
bis 327,67
[m/min]
0 bis
6,5535
0 bis
65535
0 bis
65535
100
10
100
10000
1
1
ü ü
ü ü
ü ü
ü ü
ü
ü
52
Page 53

Adresse
relativ absolut
Prozess-
Image
DE
WORD
BYTE
BIT
20 0-7 160-167
10
21 0-7 168-175
22 0-7 176-183
11
23 0-7 184-191
24 0-7 192-199
12
25 0-7 200-207
26 0-7 208-215
13
27 0-7 216-223
28 0-7 224-231
14
29 0-7 232-239
30 0-7 240-247
15
31 0-7 248-255
32 0-7 256-263
16
33 0-7 264-271
BIT
Signal
Motor current M1 SINT16
Motor current M2 SINT16
Motor current M3 SINT16
—
—
—
Wire position SINT16
Aktivität /
Datentyp
Bereich
-327,68
bis 327,67
[A]
-327,68
bis 327,67
[A]
-327,68
bis 327,67
[A]
-327,68
bis 327,67
[mm]
100
100
100
100
Faktor
Standard
Economy
ü
ü
ü
ü
ü
ü
ü
34 0-7 272-279
17
35 0-7 280-287
36 0-7 288-295
18
37 0-7 296-303
38 0-7 304-311
19
39 0-7 312-319
Zuordnung Sensorstatus 1-4
Wertebereich
Safety status
—
—
—
Signal Beschreibung
Sensor status 1 OPT/i WF R Drahtende (4,100,869)
Sensor status 2 OPT/i WF R Drahtfass (4,100,879)
Sensor status 3 OPT/i WF R Ringsensor (4,100,878)
Sensor status 4 Drahtpufferset CMT TPS/i (4,001,763)
Bit 1 Bit 0 Beschreibung
0 0 Reserve
ü
ü
ü
0 1 Halt
1 0 Stopp
53
Page 54

Bit 1 Bit 0 Beschreibung
1 1 Nicht eingebaut / aktiv
Wertebereich
Process Bit
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 kein Prozess oder Parameteranwahl
intern
0 0 0 0 1 MIG/MAG Puls-Synerigc
0 0 0 1 0 MIG/MAG Standard-Synergic
0 0 0 1 1 MIG/MAG PMC
0 0 1 0 0 MIG/MAG LSC
0 0 1 0 1 MIG/MAG Standard-Manuell
0 0 1 1 0 Elektrode
0 0 1 1 1 WIG
0 1 0 0 0 CMT
0 1 0 0 1 ConstantWire
54
Page 55

DE
55
Page 56

 Loading...
Loading...