


Operating
Instructions
RI FB/i FANUC 1.0
RI MOD/i CC-M40 Ethernet/IP - 2P
JA
操作手順
42,0426,0223,JA 023-06092022


目次
一般事項 4
安全上の注意 4
装置のコンセプト 4
ブロック図 5
同梱物 5
必要な道具と材料 5
設置要件 5
接続と指示 6
ロボットインターフェース上の接続 6
ロボットインターフェース PCB の LED 6
電源診断用 LED 7
ネットワーク接続診断の LED 8
RJ 45 モジュールの接続とインジケータ 9
技術データ 11
環境状況 11
ロボットインターフェースの技術データ 11
データ伝送の特性 11
設定パラメータ 11
ロボットインターフェースの設定 13
一般事項 13
プロセスイメージの設定 13
IP アドレスの設定 13
ロボットインターフェースの設定 14
ロボットインターフェースの設置 15
安全記号 15
準備 15
データケーブルの配線 16
ロボットインターフェースの設置 17
最終作業 17
バスモジュールの設置 18
安全に関する注意 18
バスモジュールの設置 18
入力および出力信号標準イメージ FANUC 1.0 19
データタイプ 19
入力信号の利用可能性 19
入力信号(ロボットから電源へ) 19
Working mode の値範囲 28
値の範囲 Process line selection 29
TWIN モードの値の範囲 29
Documentation mode の値の範囲 29
値の範囲 Process controlled correction 29
Command value selection の値の範囲 29
値の範囲 Process controlled correction 2 30
出力信号の利用可能性 31
出力信号(電源からロボットへ) 31
センサーステータスの割り当て 1~4 39
値範囲 Safety status 39
Function status の値の範囲 39
Process Bit の値範囲 39
入力信号の TAG の表 40
Cooling unit mode の値の範囲 41
値の表 41
出力信号の TAG 表 43
JA
3

一般事項
(3)(1) (2) (5)(4)
Robot
Control
(6) (7) (8)
安全上の注意
誤操作を不適切に行うと危険です。
重度の傷害や物体への損傷が発生するおそれがあります。
▶
▶
▶
計画外の信号伝送を行うと危険です。
重度の傷害や物体への損傷が発生するおそれがあります。
▶
装置のコンセプト ロボットインターフェースは、溶接電源と標準のバスモジュールのインタフェースとし
て機能し、幅広い通信プロトコルに対応しています。
Fronius は、溶接電源にロボットインターフェースを工場で装着する場合がありますが、
適切なトレーニングを受けた有資格者によりレトロフィットすることも可能です。
警告!
本書に記載されているすべての操作と機能は、トレーニングを受けた有資格者のみ
が実行してください。
この文書を読み、理解してください。
システム部品のすべての操作手順(特に安全規則)を読み、理解してください。
警告!
インターフェースを介して安全信号を伝送しないでください。
4
(1) ロボット制御システム
(2) SpeedNet データケーブル
(3) ロボットインターフェース
(4) 溶接電源
(5) 冷却ユニット
(6) 連結ホース
(7) ワイヤ送給装置
(8) ロボット

ブロック図
Spider NT241
RI FB/i FANUC 1.0
Data
24 V
Module
(1)
(2)
(3)
JA
同梱物
必要な道具と材料
-
ネジ回し TX8
-
ネジ回し TX20
-
ネジ回し TX25
-
ペンチ
(1) RI FB/i FANUC 1.0
(2) データケーブル
4 ピン
(3) つのケーブルタイ
(4) 操作手順
(画像なし)
設置要件 ロボットインターフェースは、溶接電源の後部の指定された開口部にのみ設置すること
ができます。
5

接続と指示
(2) (3)
(1)
(14)
(13)
(12)
(11)
(2)
(1)
(9)
(10)
(8)
(7)
(3) (4)
(5) (6)
ロボットインター
フェース上の接続
ロボットインター
フェース PCB の
LED
(1) 電源接続接続
2 ピン
(2) SpeedNet データケーブル接続、4
ピン
(3) バスモジュール接続
6
(1) ETH1 LED 緑色
(2) ETH2 LED
オレン
ジ
ネットワーク接続の診断用。
詳細は、以下の「ネットワーク接続診断用
LED」セクションを参照してください

(3) LED 3 緑色
(4) LED 4 緑色
(5) LED 5 緑色
(6) LED 6 赤色
(7) +3V3 LED 緑色 電源の診断用。
(8) +24V LED 緑色
機能なし
-
4 Hz でフラッシュ = SpeedNet 接続
なし
-
20 Hz でフラッシュ = SpeedNet との
接続を確立中
-
1 Hz でフラッシュ = SpeedNet 接続
を確立済み
内部エラーが発生すると点灯します。
解決策: ロボットインターフェースを再起
動してください。問題が解決しない場合
は、サービスチームに連絡して下さい。
詳細は、以下の「電源診断用 LED」セクシ
ョンを参照してください
JA
電源診断用 LED
(9) DIG OUT 2 LED 緑色
(10) DIG OUT 1 LED 緑色
(11) LED 11 緑色
(12) LED 12 緑色
(13) LED 13 緑色
(14) LED 14 緑色
LED インジケ
ータ
オフ
+24V
点灯
意味 原因
インターフェース用に使用可
能な電源電圧がありません
24 VDC 電源電圧がロボットイ
ンターフェースに通電してい
ます
デジタル出力 2。アクティブ時に LED が
点灯します
デジタル出力 1。アクティブ時に LED が
点灯します
機能なし
-
ロボットインターフェー
スの電源が確立されてい
ません
-
電源ケーブルの故障
+3V3
オフ
点灯
動作電圧がロボットインター
フェースに通電していません
3 VDC 動作電圧がロボットイ
ンターフェースに通電してい
ます
-
24 VDC 電源電圧が通電し
ていません
-
ロボットインターフェー
スの電源ユニットが故障
しています
7

ネットワーク接続
診断の LED
LED 表示器 意味 原因
-
オフ ネットワーク接続なし
ETH1
点灯 ネットワーク接続確立済み
点滅 データ伝送中
-
インターフェースのネッ
トワーク接続未確立
ネットワークケーブル異
常
ETH2
オフ 伝送速度 10 メガビット / 秒
点灯 伝送速度 100 メガビット/秒
8

RJ 45 モジュール
(12)(11)(10)
(14)(13)
(9)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
の接続とインジケ
ータ
(1) TX+
(2) TX-
(3) RX+
JA
(4),
(5)
(6) RX-
(7),
(8)
(9) 接続 2 の接続/アクティビティを 示す LED
(10) MS LED(モジュールステータス)
(11) RJ-45 イーサネット接続 2
(12) RJ-45 イーサネット接続 1
(13) 接続 1 の接続/アクティビティを 示す LED
(14) NS LED(ネットワークステータス)
通常は使用しません。信号の完
全性を保証するために、これら
のピンは相互接続しなければな
らい。また、フィルタ回路通過
後に、接地線(PE)で終端しな
ければならい。
通常は使用しません。信号の完
全性を保証するために、これら
のピンは相互接続しなければな
らい。また、フィルタ回路通過
後に、接地線(PE)で終端しな
ければならい。
NS LED(ネットワークステータス)
ステータス 意味
オフ 電源電圧または IP アドレスなし
緑色に点灯 オンライン、確立された接続が一つ以上あり
(CIP カテゴリ 1 または 3)
緑色に点滅 オンライン、確立された接続なし
赤色に点灯 二重 IP アドレス、重大なエラー
赤色に点滅 一つ以上の接続にてタイムアウト
(CIP カテゴリ 1 または 3)
MS LED(モジュールステータス)
ステータス 意味
オフ 電源電圧なし
緑色に点灯 「実行」状態のスキャナーにより制御。CIP Sync が有効なと
き、時間はグランドマスタークロックに同期されます
緑色に点滅 未構成、アイドル状態のスキャナー。CIP Sync が有効なと
き、時間はグランドマスタークロックに同期されます
赤色に点灯 重大なエラー - 例外状況、重大な障害など
赤色に点滅 修正可能なエラー - モジュールは設定されていますが、保存
されているパラメータと使用されるパラメータ(設定プロセ
スイメージ、IP アドレス)に違いがあります
9

接続/動作 LED
ステータス 意味
オフ 接続なし、アクティビティなし
緑色に点灯 接続済み(100 Mbit/秒)
緑色の明滅 アクティビティ(100 Mbit/秒)
黄色に点灯 接続済み(10 Mbit/秒)
黄色の明滅 アクティビティ(10 Mbit/秒)
10

技術データ
JA
環境状況
ロボットインター
フェースの技術デ
ータ
注意!
禁止の環境条件によりリスクが発生します。
これは機器に重大な損傷を与える可能性があります。
次の環境状況下でのみ装置を保管および操作してください。
▶
周囲空気の温度範囲:
-
作動中:-10 °C~+40 °C(14 °F~104 °F)
-
輸送時および保管時:-20 °C~+55 °C(-4 °F~131 °F)
相対湿度:
-
最大 50%、40°C(104°F)
-
最大 90%、20 °C(68 °F)
周囲空気:埃、酸、腐食性ガスや物質などがない。
海抜高度:最高 2000 メートル(6500 フィート)まで。
電源 内部(24 V)
保護等級 IP 23
データ伝送の特性
設定パラメータ いくつかのロボット制御システムでは、バスモジュールがロボットと通信できるように、
RJ-45 接続
伝送技術:
Ethernet
中 (4 x 2 ツイストペアケーブル:
カテゴリ 3(10 メガビット / 秒)
カテゴリ 5(100 メガビット / 秒)
ケーブル、プラグ、終端抵抗を選択する場合は、イーサネット/IP システムの計画と設
置に関する ODVA の推奨事項を守ってください。
EMC 試験は、IE-C5ES8VG0030M40M40-F ケーブルを使用してメーカーが実施します。
伝送速度:
10 または 100 メガビット/秒
バス接続:
RJ-45 イーサネット
ここで説明する設定パラメータを宣言する必要があります。
パラメータ 値
ベンダー ID 534
hex
(1332
dec
)
11

パラメータ 値
装置の種類 C
hex
製品コード 340
(12
hex
dec
(832
)
dec
)
12

ロボットインターフェースの設定
(1)
(2)
JA
一般事項
プロセスイメージ
の設定
ロボットインターフェースのディップ ・ス
イッチは、以下を設定するために使用され
ます。
-
プロセスイメージ(標準イメージ)
-
IP アドレス
プロセスイメージのデフォルト設定:
OFF に設定されたディップ・スイッチの位
置 7 と 8(1)= 標準イメージ = RI FB/i
FANUC 1.0
IP アドレスのデフォルト設定 =
192.168.0.2:
-
OFF(1)に設定されたディップ・スイ
ッチの 6、5、4、3、1 の位置
-
ON(2)に設定されたディップ・スイ
ッチの位置 2
ディップ・スイッチ
8 7 6 5 4 3 2 1 設定
オフ オフ
オフ オン
オン オフ
オン オン
- - - - - -
- - - - - -
- - - - - -
- - - - - -
標準イメージ
(FANUC 1.0)
未使用
未使用
未使用
プロセスイメージは転送されたデータ量とシステム互換性を定義します。
IP アドレスの設定 IP アドレスは以下のように設定できます。
-
ディップ・スイッチにより 192.168.0.xxx
(xx = ディップ・スイッチ設定 = 0~63)で定義された範囲内
ディップ・スイッチによるアドレス設定:
ディップ・スイッチ
8 7 6 5 4 3 2 1
オフ オフ オフ オフ オフ オン
オフ オフ オフ オフ オン オフ
オン オン オフ オン オン オフ
オン オン オフ オン オン オン
- -
- -
- -
- -
IP アドレスはディップ・スイッチの 1~6 の位置で設定できます。
設定はバイナリ形式で実行されます。10 進数形式では、設定範囲は 0~63 です。
IP アドレス
192.168.0.1
192.168.0.2
:
192.168.0.54
192.168.0.55
13

次の IP アドレスが納品時にディップ・スイッチで設定されています。
-
IP アドレス 192.168.0.2
-
サブネットマスク:255.255.255.0
-
デフォルトゲートウェイ:0.0.0.0
ロボットインター
フェースの設定
目的の構成に従ってディップ・スイッチを設定します
1
注記!
DIP スイッチ設定が無効だとリスクが発生します。
リスクは故障の原因となります。
ディップ・スイッチの設定を変更したときは必ずインターフェースを再起動する必
▶
要があります。これが変更を有効にする唯一の方法です。
インターフェースの再起動 = 電源を遮断してから復旧するか、溶接電源の Web サ
▶
イトで関連する機能を実行します(SmartManager)。
14
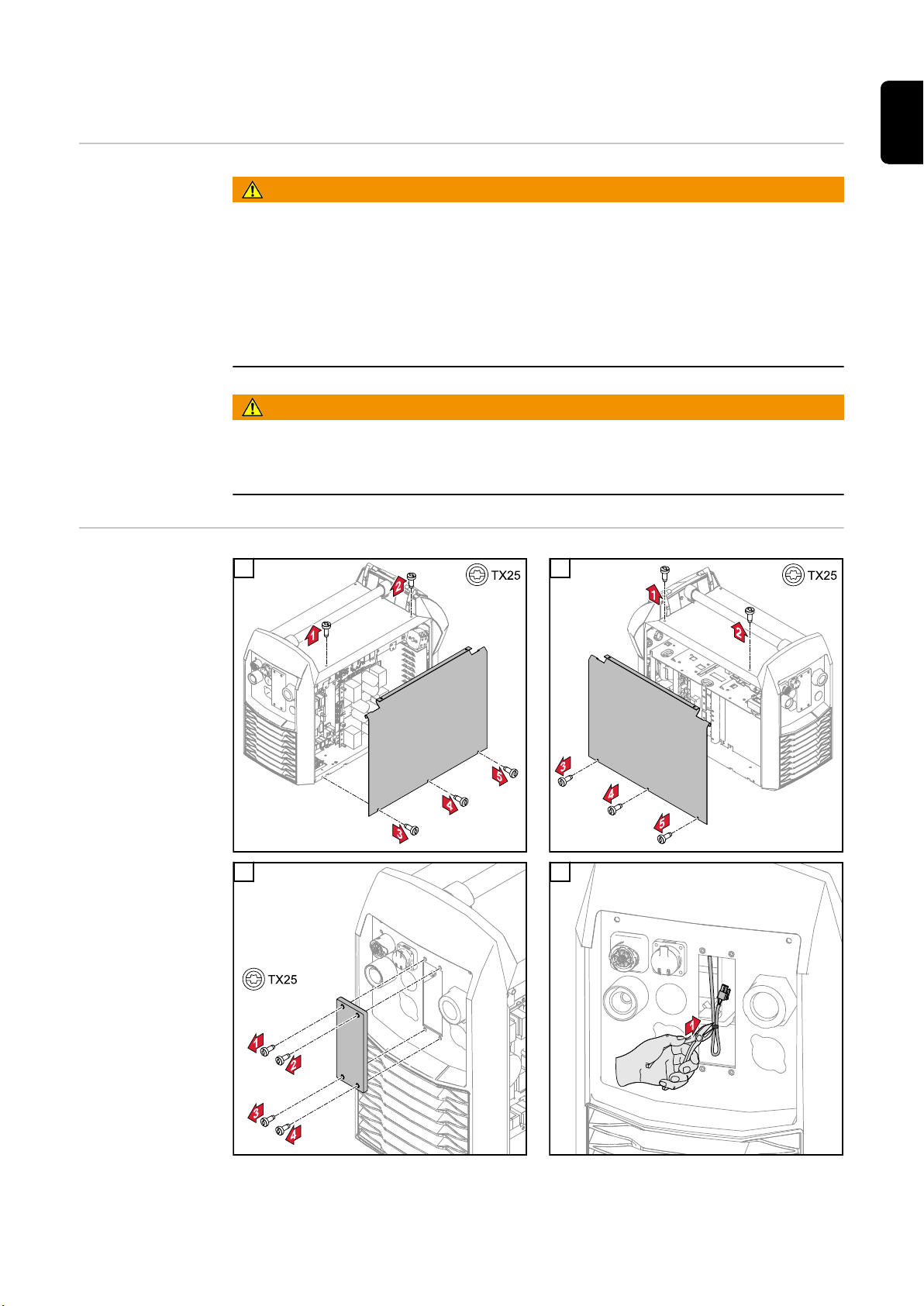
ロボットインターフェースの設置
JA
安全記号
準備
警告!
感電する危険があります。
これは重傷または死亡につながる可能性があります。
作業を始める前に、関係するすべての装置とコンポーネントの電源を切り、それら
▶
をグリッドから切り離してください。
意図せず再起動しないために、関連するすべての装置とコンポーネントを固定して
▶
ください。
装置を開いたら、適切な計測装置を使用して電荷を帯びた部品(コンデンサーなど)
▶
が放電されていることを確認します。
警告!
接地線の不適切接続によって生じる電流障害。
重傷を負ったり、物的損害を負う可能性があります。
純正の指定個数のハウジングねじを使用してください。
▶
1 2
3 4
15

5
データケーブルの
配線
1 2
3
16
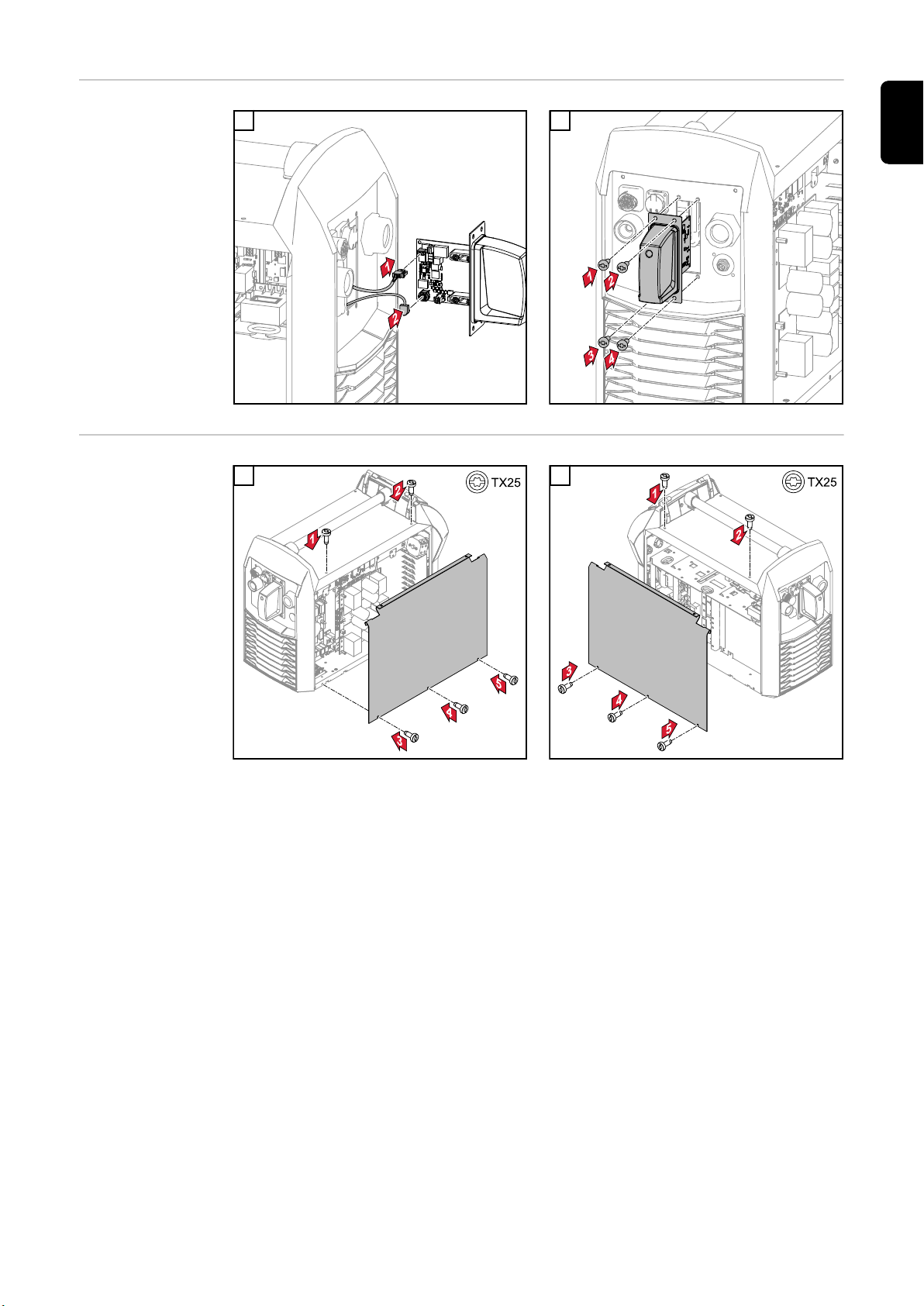
ロボットインター
フェースの設置
1 2
JA
最終作業
1 2
17
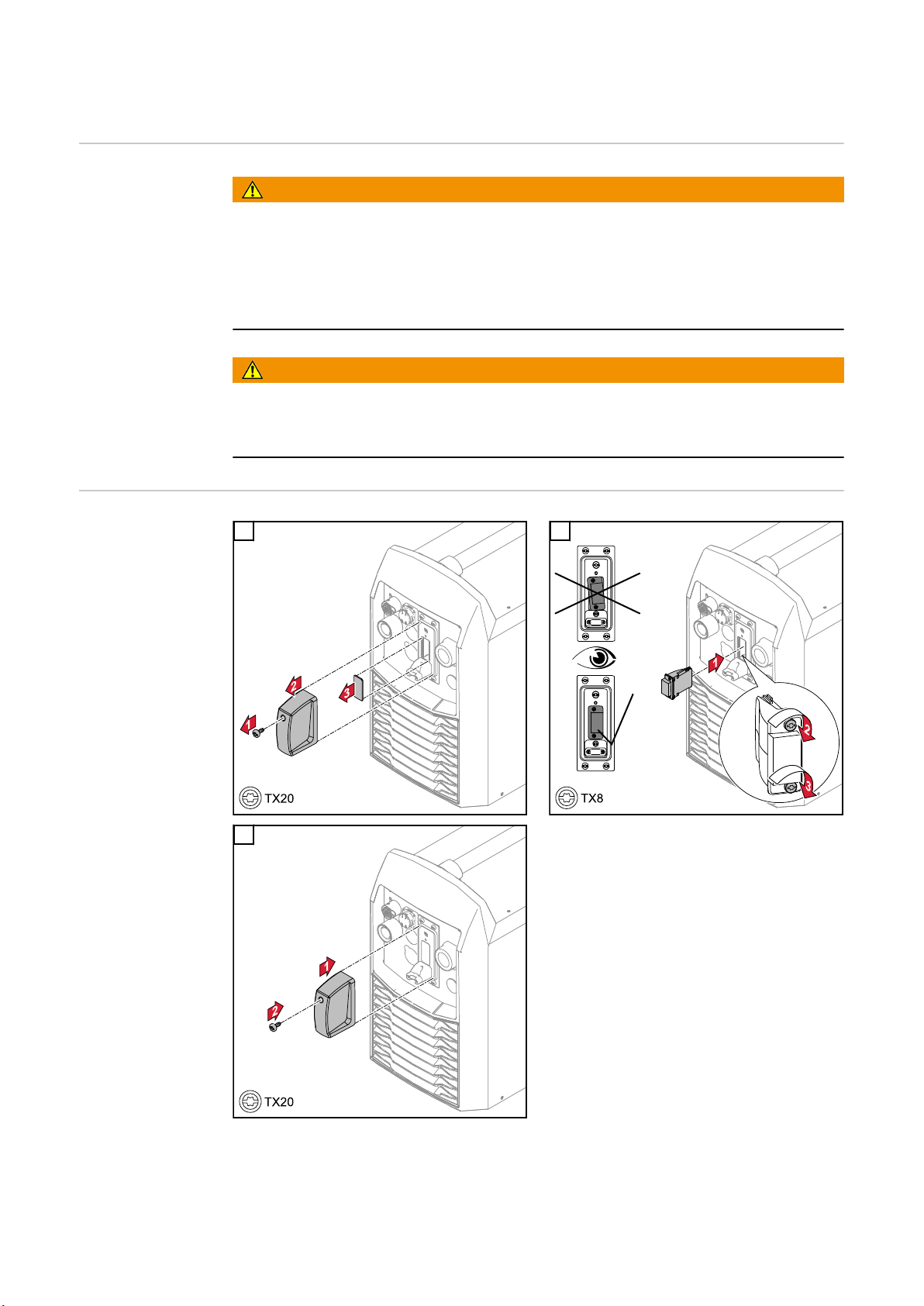
バスモジュールの設置
安全に関する注意
バスモジュールの
設置
警告!
感電の危険があります。
感電は重傷や死亡につながる恐れがあります。
作業を始める前に、関係するすべての装置とコンポーネントの電源を切り、それら
▶
をグリッドから切り離してください。
関係するすべての装置とコンポーネントのスイッチが再度オンにならないように固
▶
定してください。
警告!
接地線の接続が不十分だと、感電する危険があります。
感電は重大な人身事故や物的損害が発生する恐れがあります。
純正の指定個数のハウジングねじを使用してください。
▶
1 2
18
3

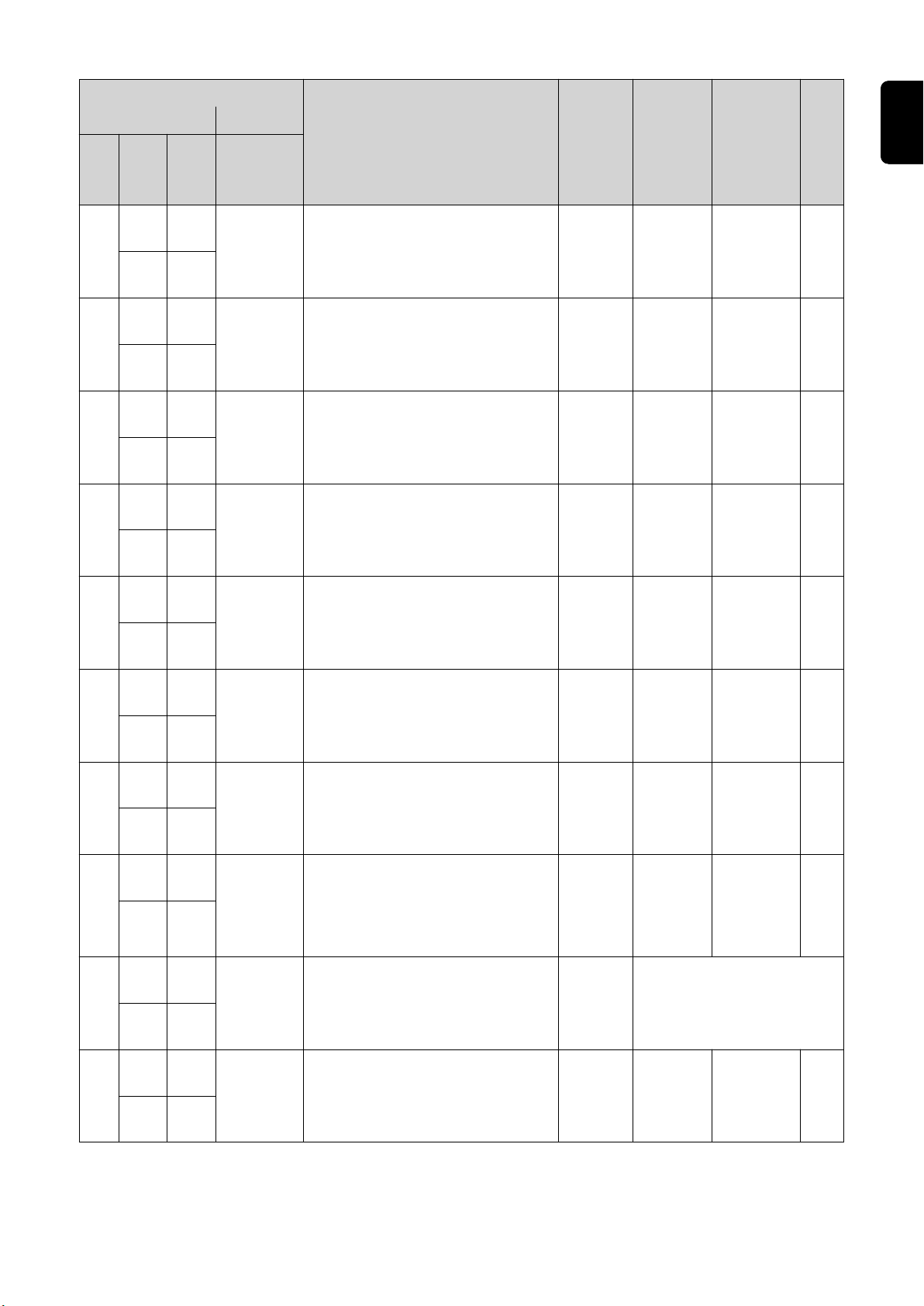
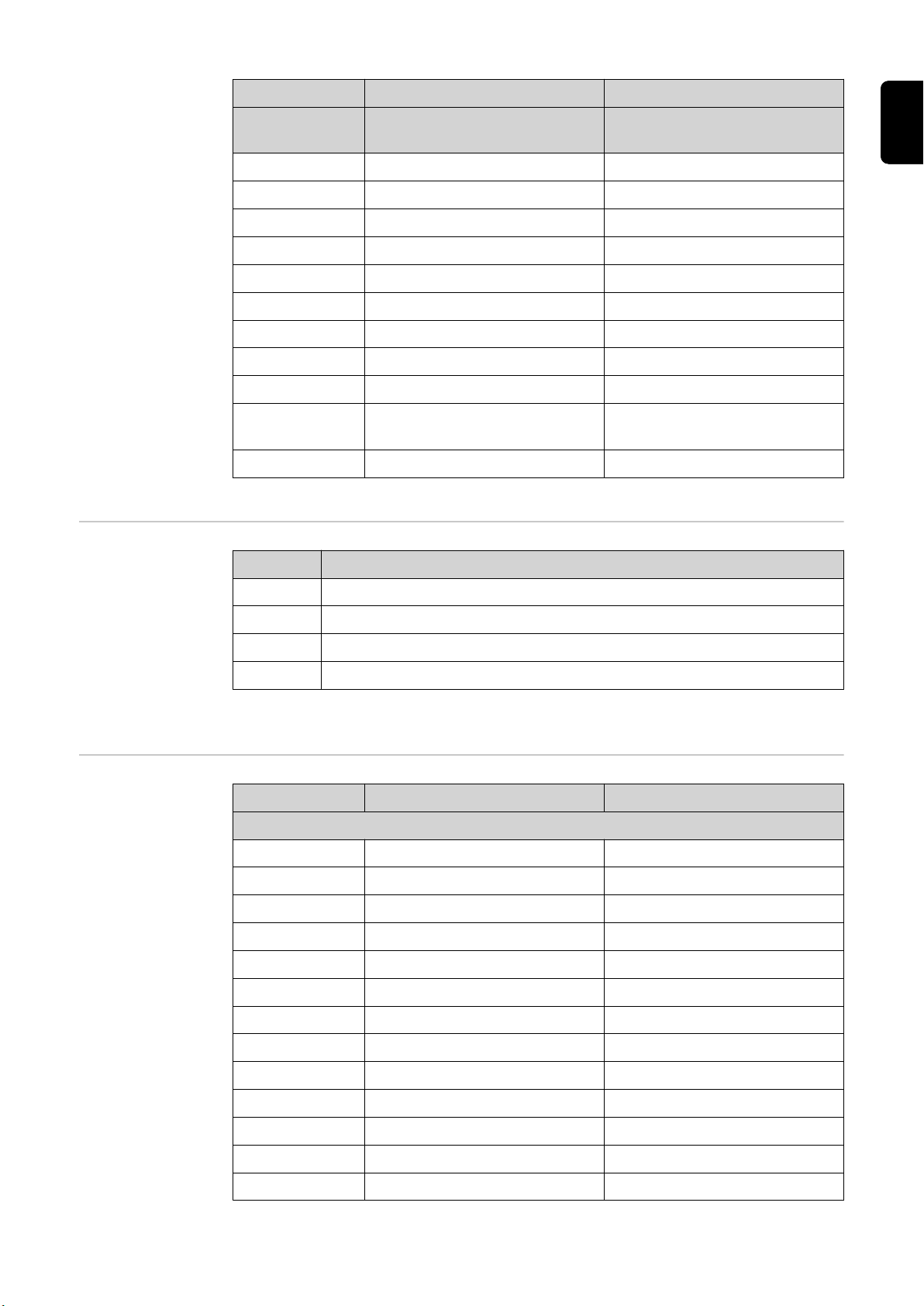
入力および出力信号標準イメージ FANUC 1.0
データタイプ 次のデータ型が使用されます。
-
UINT16(符号なし整数)
0~65535 の整数
-
SINT16(符号付き整数)
-32768~32767 の整数
変換例:
-
正の値(SINT16)の場合
例、必要なワイヤ供給速度 x 係数
12.3 m/分 x 100 =1230
-
負の値(SINT16)の場合
例、アーク補正 x 係数
-6.4 x 10 = -64
dec
=FFC0
dec
hex
=04CE
hex
JA
入力信号の利用可
能性
入力信号(ロボット
から電源へ)
下記の入力信号は、TPS/i 電源のファームウェア V3.2.30 から使用可能です。
19

アドレス
相対 絶対
ワード
0
バイト
0
1
ビット
ビット
0 1 Welding Start 増加
1 2 Robot ready 高
2 3 Working mode Bit 0 高
3 4 Working mode Bit 1 高
4 5 Working mode Bit 2 高
5 6 Working mode Bit 3 高
6 7 Working mode Bit 4 高
7 8 —
0 9 Gas on 増加
1 10 Wire forward 増加
2 11 Wire backward 増加
3 12 Error quit 増加
4 13 Touch sensing 増加
5 14 Torch blow out 増加
6 15 Processline selection Bit 0 高 29 ページの表
7 16 Processline selection Bit 1 高
信号
説明
アクティビティ/
データタイプ
28 ページの表
Working mode
の値範囲を参照
selection を参
範囲
値の範囲
Process line
照
係数
0 17 Welding Simulation 高
1 18 Synchro pulse on 高
2 19 SFI on 高
2
1
3
3 20 —
4 21 —
5 22 —
6 23 Wire brake on 高
7 24 Torchbody Xchange 高
0 25 —
1 26 Teach mode 高
2 27 —
3 28 —
4 29 —
5 30 Wire sense start 増加
6 31 Wire sense break 増加
7 32 —
20

アドレス
相対 絶対
ワード
バイト
0 33 TWIN mode Bit 0 高 29 ページの表
1 34 TWIN mode Bit 1 高
2 35 —
3 36 —
4
2
4 37 —
5 38 Documentation mode 高
6 39 —
7 40 —
0 41 —
1 42 —
2 43 —
ビット
ビット
信号
説明
アクティビティ/
データタイプ
TWIN モードの
値の範囲を参照
29 ページの表
Documentation
mode の値の範
範囲
囲を参照
JA
係数
3 44 —
5
6
3
4 45 —
5 46 —
6 47 —
7 48
0 49 —
1 50 —
2 51 —
3 52 —
4 53 —
5 54 —
6 55 —
7 56 —
0 57 ExtInput1 => OPT_Output 1 高
1 58 ExtInput2 => OPT_Output 2 高
2 59 ExtInput3 => OPT_Output 3 高
Disable process controlled
correction
高
7
3 60 ExtInput4 => OPT_Output 4 高
4 61 ExtInput5 => OPT_Output 5 高
5 62 ExtInput6 => OPT_Output 6 高
6 63 ExtInput7 => OPT_Output 7 高
7 64 ExtInput8 => OPT_Output 8 高
21

アドレス
相対 絶対
ワード
4
5
バイト
0~
8
9
10、110~
7
0~
7
7
ビット
ビット
65~80
81~96
信号
Welding characteristic- / Job
number
溶接プロセスの場合
MIG/MAG パルスシナジー、
MIG/MAG 標準シナジー、
MIG/MAG 標準手溶接、
MIG/MAG PMC,
MIG/MAG LSC,
CMT,
ConstantWire:
Wire feed speed command value
ジョブ操作の場合:
出力電源補正
溶接プロセス
MIG/MAG パルスシナジー、
MIG/MAG 標準シナジー、
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
説明
グルー
プ 3
グルー
プ 3
アクティビティ/
データタイプ
UINT16 0~1000 1
SINT16
SINT16
SINT16
範囲
-327.68~
327.67
[m/分]
-20.00~
20.00
[%]
-10.0~
100.0
[m/分]
100
10
係数
6
7
12、130~
7
14、150~
7
97~112
113~128
Arclength correction
溶接プロセスの場合
MIG/MAG 標準手溶接:
Welding voltage
ジョブ操作の場合:
Arclength correction
溶接プロセス中の ConstantWire:
Hotwire current
溶接プロセスの場合
MIG/MAG パルスシナジー、
MIG/MAG 標準シナジー、
MIG/MAG PMC,
MIG/MAG LSC,
CMT:
Pulse-/dynamic correction
溶接プロセスの場合
MIG/MAG 標準手溶接:
Dynamic
グルー
プ 3
グルー
プ 3
UINT16
SINT16
UINT16
SINT16
UINT16
0.0~
6553.5
[V]
-10.0~
10.0
[ステッ
プ]
0.0~
6553.5
[A]
-10.0~
10.0
[ステッ
プ]
0.0~10.0
[ステッ
プ]
10
10
10
10
10
22

アドレス
相対 絶対
ワード
バイト
16
8
17
18
9
19
20
10
21
22
11
23
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
129~144 Wire retract correction
145~160 Welding speed
161~176 Process controlled correction
177~192 —
信号
説明
グルー
プ 2
グルー
プ 3
グルー
プ 2
アクティビティ/
データタイプ
UINT16 0~10 10
UINT16
29 ページの表値の範囲
Process controlled
correction を参照
0~1000
[cm/分]
範囲
JA
係数
10
12
13
14
15
16
24
25
26
27
28
29
30
31
32
33
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
193~208 —
209~224 —
225~240 —
オフ/1~
241~256 Wire forward / backward length UINT16
257~272 Wire sense edge detection
グルー
プ 2
UINT16
65535
[mm]
オフ/0.5
~20
[mm]
1
10
17
34
35
0~
7
273~288 —
0~
7
23

アドレス
相対 絶対
ワード
18
19
バイト
36
37
38
39
40
ビット
ビット
0~
7
0~
0~
0~
289~304 —
7
7
305~320 Seam number UINT 16 0~65535 1
7
0 321
1 322 Disable SFI-Parameter (Image) 高
2 323 Disable SP-Parameter (Image) 高
3 324
4 325 Disable gas-settings (Image) 高
5 326 Disable components setup (TAG) 高
6 327
信号
Disable Start-End-Parameter
(Image)
Disable Process-Mix-Parameter
(Image)
Disable language/units/
standards (TAG)
説明
アクティビティ/
データタイプ
高
高
高
範囲
係数
20
41
7 328
0 329
1 330 —
2 331 —
3 332 —
4 333 —
5 334 —
6 335 —
7 336 —
Disable process controlled
correction 2 (Image)
Enable arc break monitoring /
arc loss
高
高
24

アドレス
相対 絶対
ワード
バイト
42
21
43
ビット
ビット
0 337 Enable resistance overwrite High
1 338 Set resistance value High
2 339 Enable inductance overwrite High
3 340 Set inductance value High
4 341 —
5 342 —
6 343 —
7 344 —
0 345 —
1 346 —
2 347 —
3 348 —
4 349 —
5 350 —
信号
説明
アクティビティ/
データタイプ
範囲
JA
係数
22
23
24
25
44
45
46
47
48
49
50
51
6 351 Command value selection Bit 0 High 29 ページの表
Command
7 352
0~
7
353~368 TAG Start address UINT 16 0~65535 1
0~
7
0~
7
369~384 TAG value 1
0~
7
0~
7
385~400 TAG value 2
0~
7
0~
7
401~416 TAG value 3
0~
7
Reserve (Command value
selection Bit 1)
グルー
プ 1
グルー
プ 1
グルー
プ 1
UINT 16 1
UINT 16 1
UINT 16 1
value selection
の値の範囲を参
照
26
52
53
0~
7
0~
7
417~432 TAG value 4
グルー
プ 1
UINT 16 1
25
アドレス
相対 絶対
ワード
27
28
29
30
バイト
54
55
56
57
58
59
60
61
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
433~448 TAG value 5
449~456 TAG Quantity UINT 8 0~8 1
457~464 TAG Command
465~480 Gas preow
481~496 Gas postow
信号
説明
グルー
プ 1
0x0001
= TAG
読み込
み |
0x0002
= TAG
書き込
み
グルー
プ 2
グルー
プ 2
アクティビティ/
データタイプ
UINT 16 1
UINT 8 0~2 1
UINT 16
UINT 16
0~9.9
[秒]
0~60
[秒]
範囲
係数
10
10
31
32
33
34
35
62
63
64
65
66
67
68
69
70
71
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
497~512 Inching Value
513~528 S2T Starting current
529~544 S2T Starting current time
545~560 S2T Slope 1
561~576 S2T Slope 2
グルー
プ 2
グルー
プ 2
グルー
プ 2
グルー
プ 2
グルー
プ 2
SINT 16
UINT 16
UINT 16
UINT 16
UINT 16
0.5~25
[m/分]
0~200
[%]
オフ (0) /
0.1~10
[秒]
0~9.9
[秒]
0~9.9
[秒]
100
1
10
10
10
26
アドレス
相対 絶対
ワード
バイト
72
36
73
74
37
75
76
38
77
78
39
79
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
577~592 S2T End current
593~608 S2T End current time
609~624 S2T Start Arclength correction
625~640 S2T End Arclength correction
信号
説明
グルー
プ 2
グルー
プ 2
グルー
プ 2
グルー
プ 2
アクティビティ/
データタイプ
UINT 16
UINT 16
SINT 16 -10~+10 10
SINT 16 -10~+10 10
範囲
0~200
[%]
オフ (0) /
0.1~10
[秒]
10
JA
係数
1
40
41
42
43
44
80
81
82
83
84
85
86
87
88
89
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
641~656
657~672
673~688
689~704 SFI Hotstart
705~720 Process controlled correction 2
Process-Mix High power time
correction
Process-Mix Low power time
correction
Process-Mix Low power
correction
グルー
プ 3
グルー
プ 3
グルー
プ 3
グルー
プ 2
グルー
プ 2
SINT 16 -10~+10 10
SINT 16 -10~+10 10
SINT 16 -10~+10 10
オフ
(0.0) /
UINT 16
30 ページの表値の範囲
Process controlled
correction 2 を参照
0.01~
2.00
[秒]
100
45
90
91
0~
7
0~
7
721~736 SP Delta wire feed
グルー
プ 2
SINT 16 -10~+10 10
27

アドレス
相対 絶対
ワード
46
47
48
49
50
92
93
94
95
96
97
98
99
100
101
バイト
0~
0~
0~
0~
0~
0~
0~
0~
0~
0~
ビット
ビット
信号
7
737~752 SP Frequency
7
7
753~768 SP Duty Cycle
7
7
769~784 SP Arclength correction high
7
7
785~800 SP Arclength correction low
7
7
801~816 Resistance
7
説明
グルー
プ 2
グルー
プ 2
グルー
プ 2
グルー
プ 2
グルー
プ 2
アクティビティ/
データタイプ
範囲
SINT 16 -10~+10 10
SINT 16
-100~
+100
SINT 16 -10~+10 10
SINT 16 -10~+10 10
UINT 16
0 ~ +400
[mOhm]
10
係数
1
102
0~
7
51
103
0~
7
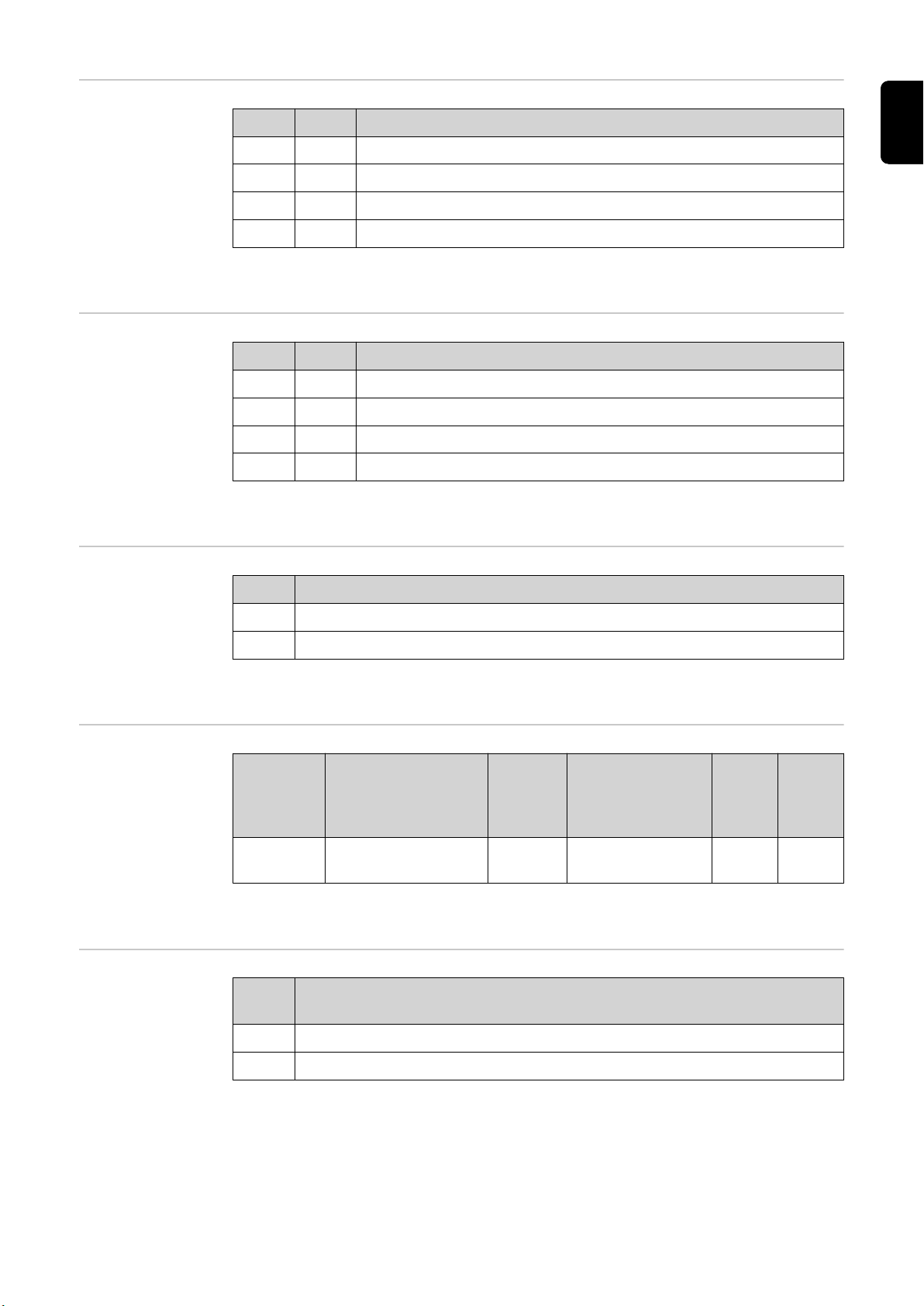
Working mode の
値範囲
説明
グルー
プ 2
UINT 16
817~832 Inductance
ビッ
ト 4
ビッ
ト 3
ビッ
ト 2
ビッ
ト 1
ビッ
ト 0
0 0 0 0 0 内部パラメータ選択内容
0 0 0 0 1 特別な 2 ステップモードの特性
0 0 0 1 0 ジョブモード
0 1 0 0 0 2 ステップモードの特性
0 1 0 0 1 MIG/MAG 標準手溶接、2 ステップ
1 1 0 0 0 R/L 測定
1 1 0 0 1 R/L 調整
操作モードの値範囲
0 ~ +250
[マイクロ
ヘンリー]
10
28
値の範囲 Process
line selection
Bit 1 Bit 0 説明
0 0 加工ライン 1(default)
0 1 加工ライン 2
1 0 加工ライン 3
1 1 予備
加工ライン選択の値の範囲
JA
TWIN モードの値
の範囲
Documentation
mode の値の範囲
値の範囲 Process
controlled
correction
Bit 1 Bit 0 説明
0 0 TWIN Single mode
0 1 TWIN Lead mode
1 0 TWIN Trail mode
1 1 予備
TWIN モードの値の範囲
Bit 0 説明
0 溶接電源の溶接シーム番号(内部)
1 ロボットのシーム溶接番号
文書モードの値の範囲
プロセス 信号
アクティ
ビティ
データタ
イプ
値の範囲
設定範囲 単位 係数
Command value
selection の値の範
囲
PMC アーク長安定材 SINT16
プロセス依存修正の値範囲
Bit
説明
351
0 ワイヤ送給装置設定値
1 溶接電流設定値
設定値の値範囲
-3276.8~+3276.7
0.0~+5.0 ボルト 10
29
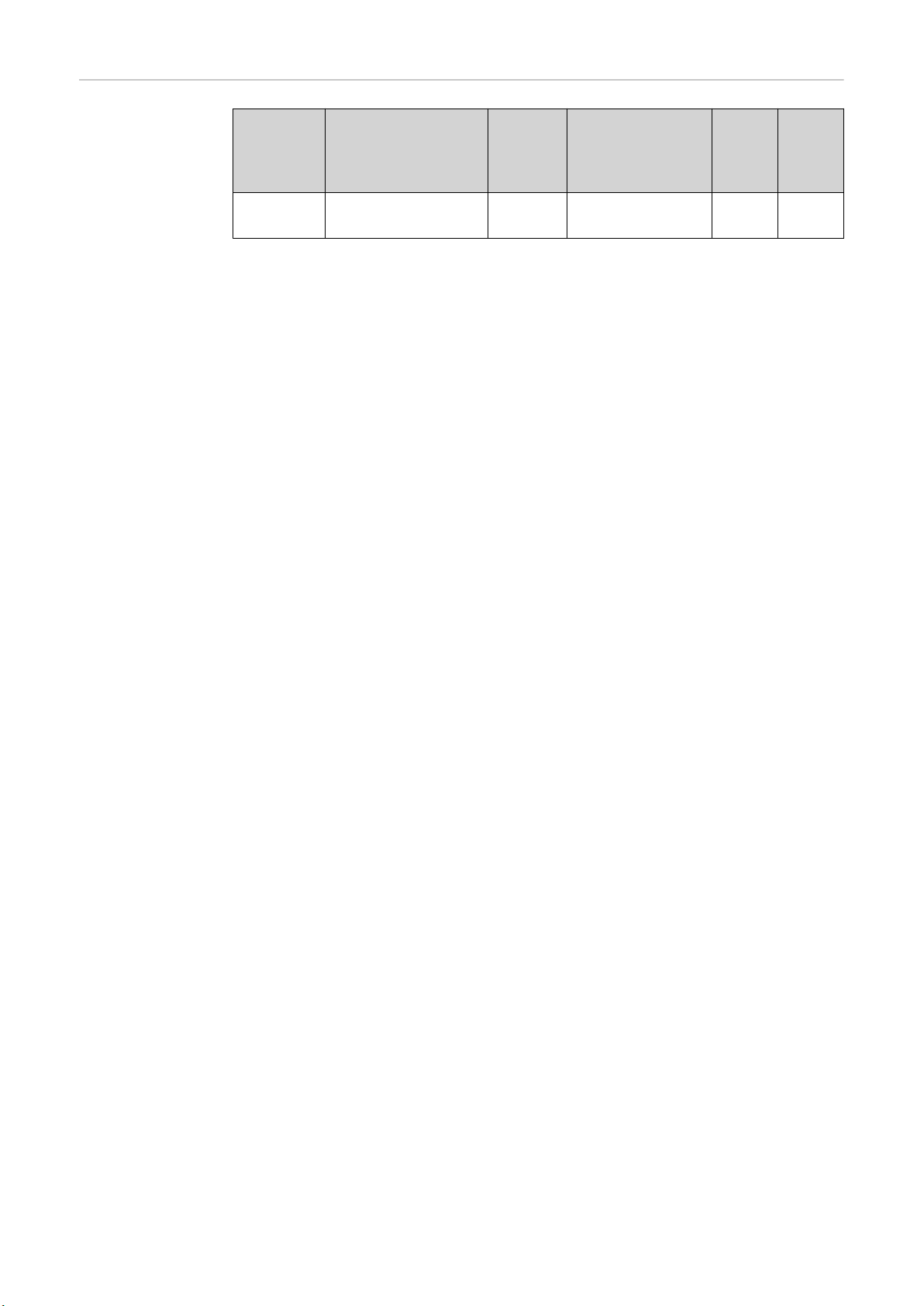
値の範囲 Process
controlled
correction 2
プロセス 信号
アクティ
ビティ
データタ
イプ
値の範囲
設定範囲 単位 係数
Penetration
PMC、LSC
プロセス依存修正の値範囲 2
stabilizer SINT16
-3276.8~+3276.7
0.0~+10.0 m/ 分 10
30
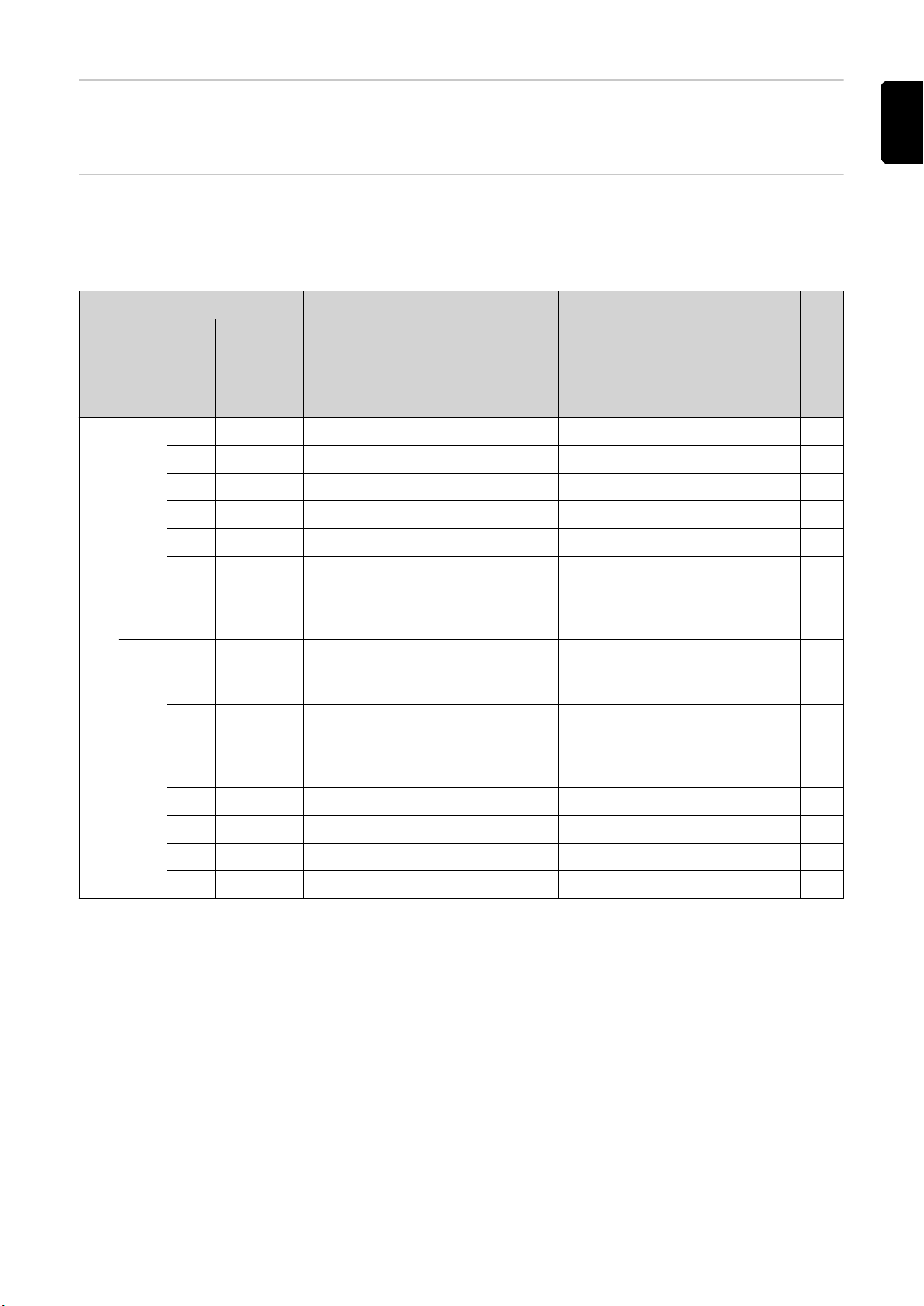
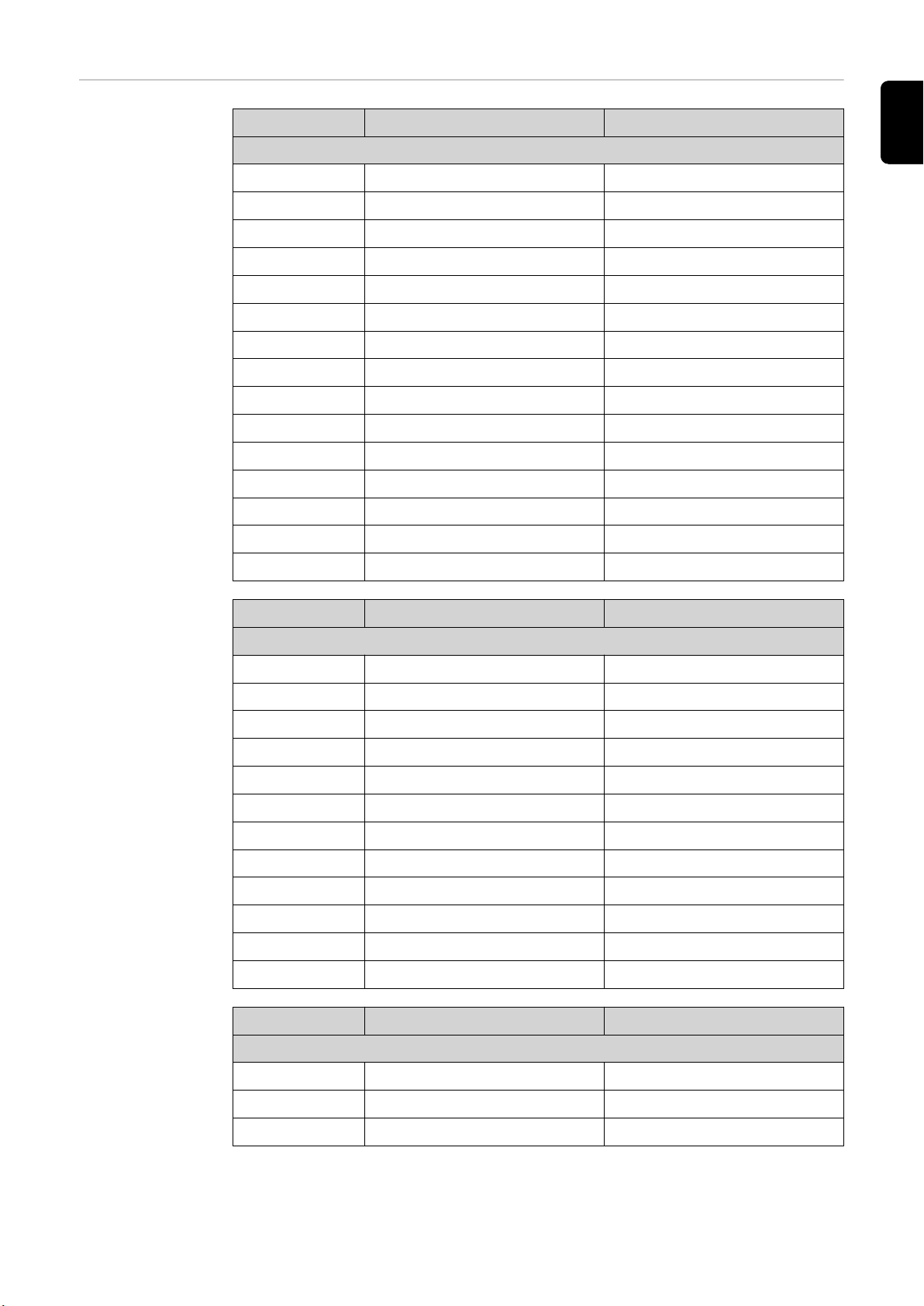
出力信号の利用可
能性
出力信号(電源から
ロボットへ)
アドレス
相対 絶対
下記の出力信号は、TPS/i 電源のファームウェア V3.2.30 から使用可能です。
JA
ワード
0
バイト
0
1
ビット
ビット
0 1 Heartbeat Powersource 1 Hz
1 2 Power source ready High
2 3 Warning High
3 4 Process active High
4 5 Current ow High
5 6 Arc stable- / touch signal High
6 7 Main current signal High
7 8 Touch signal High
0 9 Collisionbox active Low
1 10 Robot Motion Release High
2 11 Wire stick workpiece High
3 12 —
4 13 Short circuit contact tip High
5 14 Parameter selection internally High
信号
説明
アクティビティ/
データタイプ
0 = 衝突ま
たはケー
ブル断線
範囲
係数
6 15 Characteristic number valid High
7 16 Torch body gripped High
31

アドレス
相対 絶対
ワード
1
バイト
2
3
ビット
ビット
0 17 Command value out of range High
1 18 Correction out of range High
2 19 —
3 20 Limitsignal High
4 21 —
5 22 —
6 23 Main supply status Low
7 24 —
0 25 Sensor status 1 High
1 26 Sensor status 2 High
2 27 Sensor status 3 High
3 28 Sensor status 4 High
4 29 —
5 30 —
6 31 —
7 32 —
信号
説明
アクティビティ/
データタイプ
39 ページの表
センサーステー
タスの割り当て
範囲
1~4 を参照
係数
0 33 Function status Bit 0 High 39 ページの表
Function status
1 34 Function status Bit 1 High
2 35 —
4
2
5
3 36 Safety status Bit 0 High 39 ページの表
4 37 Safety status Bit 1 High
5 38 —
6 39 Notication High
7 40 System not ready High
0 41 —
1 42 —
2 43 —
3 44 —
4 45 —
5 46 —
6 47 —
の値の範囲を参
照
値範囲 Safety
status を参照
32
7 48 —

アドレス
相対 絶対
ワード
バイト
0 49 Process Bit 0 High
1 50 Process Bit 1 High
2 51 Process Bit 2 High
6
3
7
3 52 Process Bit 3 High
4 53 Process Bit 4 High
5 54 —
6 55 Gas nozzle touched High
7 56 TWIN synchronisation active High
0 57 ExtOutput1 <= OPT_Input1 High
1 58 ExtOutput2 <= OPT_Input2 High
2 59 ExtOutput3 <= OPT_Input3 High
3 60 ExtOutput4 <= OPT_Input4 High
4 61 ExtOutput5 <= OPT_Input5 High
ビット
ビット
信号
説明
アクティビティ/
データタイプ
39 ページの表
Process Bit の値
範囲
範囲を参照
JA
係数
5 62 ExtOutput6 <= OPT_Input6 High
6 63 ExtOutput7 <= OPT_Input7 High
7 64 ExtOutput8 <= OPT_Input8 High
0~
8
4
9
10
5
11
12
6
13
14
7
15
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
65~80 Real value welding voltage
81~96 Real value welding current
97~112 Real value wire feed speed
113~128
Actual real value for seam
tracking
グルー
プ 3 ア
ナログ
メータ
ー
グルー
プ 3 ア
ナログ
メータ
ー
アナロ
グメー
ター
UINT16 0~65535
UINT16
UINT16
SINT16
327.67 [V]
327.67 [A]
-327.68~
327.67
[m/分]
0.0~
0.0~
100
10
100
100
00
0~
16
8
17
7
129~144 Error number UINT16 0~65535 1
0~
7
33

アドレス
相対 絶対
ワード
9
10
11
12
13
バイト
18
19
20
21
22
23
24
25
26
27
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
145~160 Warning number UINT16 0~65535 1
161~176 Motor current M1 SINT16
177~192 Motor current M2 SINT16
193~208 Motor current M3 SINT16
209~224 —
信号
説明
アクティビティ/
データタイプ
-327.68~
327.67 [A]
-327.68~
327.67 [A]
-327.68~
327.67 [A]
範囲
係数
100
100
100
14
15
16
17
18
28
29
30
31
32
33
34
35
36
37
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
225~240 —
241~256 —
-327.68~
257~272 Wire position SINT16
273~288 —
289~304 —
327.67
[mm]
100
34

アドレス
相対 絶対
ワード
バイト
38
19
39
40
20
ビット
ビット
0~
7
0~
305~320 —
7
0 321 WebJobEditor enable High
1 322 —
2 323 —
3 324 —
4 325 —
5 326 —
6 327 —
7 328 —
0 329 —
1 330 —
信号
説明
アクティビティ/
データタイプ
範囲
JA
係数
21
2 331 —
3 332 —
41
4 333 —
5 334 —
6 335 —
7 336 —
0 337 — High
1 338 —
2 339 —
3 340 —
42
4 341 —
5 342 —
6 343 —
7 344 —
0 345 —
1 346 —
2 347 —
43
3 348 —
4 349 —
5 350 —
6 351 —
7 352 —
35

アドレス
相対 絶対
ワード
22
23
24
25
26
バイト
44
45
46
47
48
49
50
51
52
53
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
353~368 TAG Start adress UINT16 0~65535 1
369~384 TAG value 1 UINT16
385~400 TAG value 2 UINT16 1
401~416 TAG value 3 UINT16 1
417~432 TAG value 4 UINT16 1
信号
説明
アクティビティ/
データタイプ
範囲
係数
27
28
29
30
54
55
56
57
58
59
60
61
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
433~448 TAG value 5 UINT16 1
449~456 TAG Quantity UINT8 0~5 1
0x0001
= TAG
読み込
457~464 TAG Command
465~480 Cooler temperature SINT16
481~496 Cooler ow rate SINT16
み |
0x0002
= TAG
書き込
み
UINT8 0~2 1
-100~
+200 [°C]
-100~
+100 [L/分]100
10
36

アドレス
相対 絶対
ワード
バイト
62
31
63
64
32
65
66
33
67
68
34
69
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
497~512 Real energy actual value UINT16
513~528 Power value UINT16
529~560 Hour meter power on UINT32
信号
説明
アクティビティ/
データタイプ
0~6553.5
100000
範囲
[kJ]
0 ~
6553.5
[kW]
0~
[時間]
JA
係数
10
10
10
35
36
37
38
39
70
71
72
73
74
75
76
77
78
79
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
561~576
Arc on time UINT32
577~592
593~608 Gaspreow UINT16
609~624 Gaspostow UINT16
625~640 S2T Starting current time UINT16
0~
100000
[時間]
0.0~9.9
[秒]
0.0~60.0
[秒]
オフ (0) /
0.1~10.0
[秒]
10
10
10
10
40
80
81
0~
7
0~
7
641~656 S2T Slope 1 UINT16
0.0~9.9
[秒]
10
37

アドレス
相対 絶対
ワード
41
42
43
44
45
バイト
82
83
84
85
86
87
88
89
90
91
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
ビット
ビット
657~672 S2T Slope 2 UINT16
673~688 S2T End current time UINT16
689~704 —
705~720 —
721~736 —
信号
説明
アクティビティ/
データタイプ
0.0~9.9
オフ (0) /
0.1~10
[秒]
[秒]
範囲
係数
10
10
46
47
48
49
50
92
93
94
95
96
97
98
99
100
101
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
0~
7
737~752 —
753~768 —
769~784 —
785~800 —
801~816 Resistance
グルー
プ 2
UINT16
0 ~ +400
[mOhm]
10
38

アドレス
相対 絶対
ワード
バイト
102
0~
7
51
103
0~
7
センサーステータ
スの割り当て 1~4
ビット
ビット
817~832 Inductance
信号
説明
グルー
プ 2
信号 説明
Sensor status 1 OPT/i WF R ワイヤ端 (4,100,869)
Sensor status 2 OPT/i WF R ワイヤドラム (4,100,879)
Sensor status 3 OPT/i WF R リングセンサー (4,100,878)
Sensor status 4 ワイヤバッファセット CMT TPS/i (4,001,763)
アクティビティ/データタイプ
0 ~ +250
UINT16
[マイクロ
ヘンリー]
範囲
JA
係数
10
値範囲 Safety
status
Function status の
値の範囲
ビッ
ト 1
ビッ
ト 0
説明
0 0 予備
0 1 保持
1 0 停止
1 1 未インストール / アクティブ
Bit 1 Bit 0 説明
0 0 inactive
0 1 idle
1 0 nished
1 1 Error
機能ステータスの値の範囲
Process Bit の値範
囲
ビッ
ト 4
ビッ
ト 3
ビッ
ト 2
ビッ
ト 1
ビッ
ト 0
説明
0 0 0 0 0 内部パラメータ選択内容またはプロセス
はありません
0 0 0 0 1 MIG/MAG パルスシナジー
0 0 0 1 0 MIG/MAG 溶接用標準シナジー
0 0 0 1 1 MIG/MAG PMC
39

ビッ
ト 4
0 0 1 0 0 MIG/MAG LSC
0 0 1 0 1 MIG/MAG 標準手溶接
0 0 1 1 0 電極
0 0 1 1 1 TIG
0 1 0 0 0 CMT
0 1 0 0 1 ConstantWire
ビッ
ト 3
ビッ
ト 2
ビッ
ト 1
ビッ
ト 0
説明
入力信号の TAG の
表
アドレス TAG 値
BIT 325 Disable Gas settings:
TAG 30 MIG Gasvalue
TAG 31 MIG Gasfactor
TAG 32 —
TAG 33 —
TAG 34 —
TAG 35 —
TAG 36 —
TAG 37 —
TAG 38 —
TAG 39 —
アドレス TAG 値
BIT 326 Disable components setup:
TAG 40 Cooling unit mode 表 Cooling unit mode の値の範
囲ページ)参照 41
40
TAG 41 Delay time ow sensor
TAG 42 Touch sensing sensitivity
TAG 43 Ignition time out
TAG 44 —
TAG 45 —
TAG 46 —
TAG 47 —
TAG 48 —
TAG 49 —
アドレス TAG 値
BIT 327 Disable language/units/
standards:
TAG 50 Language 値の表ページ)参照 41
アドレス TAG 値
Cooling unit
mode の値の範囲
BIT 327 Disable language/units/
standards:
TAG 51 Unit (metric/imperial)
TAG 52 Welding standard (AWS/EU)
TAG 53 —
TAG 54 —
TAG 55 —
TAG 56 —
TAG 57 —
TAG 58 —
TAG 59 —
TAG 60 Arc break lter time / arc loss
error time
TAG 61 Arc break monitoring reaction
TAG 40 説明
1 eco
JA
値の表
2 auto
3 on
4 o
Cooling unit mode の値の範囲
アドレス 説明 値
言語:
0 —
1 English
2 German
3 Japanese
4 Chinese
5 Spanish
6 French
7 Czech
8 Hungarian
9 Italian
10 Norwegian
11 Polish
12 Portuguese
41

アドレス 説明 値
言語:
13 Slovakian
14 Turkish
15 Russian
16 Swedish
17 Estonian
18 Finnish
19 Lithuanian
20 Latvian
21 Dutch
22 Slovenian
23 Romanian
24 Croatian
25 Ukrainian
26 Korean
27 Icelandic
28 Vietnamese
29 Thai
30 Indonesian
31 Serbian
32 Hindi
33 Tamil
34 Danish
35 Bulgarian
アドレス 説明 値
単位(ヤード・ポンド法 / メートル法):
0 —
1 ヤード・ポンド法
2 メートル法
アドレス 説明 値
溶接標準(AWS/EU):
42
0 —
1 AWS
2 CEN
出力信号の TAG 表
アドレス 説明 値
溶接関連の値:
TAG 10001 Welding voltage
TAG 10002 Welding current
TAG 10003 Wire feed speed
TAG 10004 Real value power
TAG 10005 Ignitiondistance
TAG 10006 —
TAG 10007 —
TAG 10008 —
TAG 10009 —
TAG 10010 —
TAG 10011 —
TAG 10012 —
TAG 10013 —
TAG 10014 —
TAG 10015 —
JA
アドレス 説明 値
溶接システム関連の値:
TAG 10100 Vd max. processline
TAG 10101 Max. current weldingsystem
TAG 10102 —
TAG 10103 Safety status
TAG 10104 —
TAG 10105 —
TAG 10106 —
TAG 10107 —
TAG 10108 —
TAG 10109 —
TAG 10110 —
TAG 10111 —
アドレス 説明 値
ドキュメント関連の値:
TAG 10200 Welding time
TAG 10201 Section time
TAG 10202 —
43

 Loading...
Loading...