


/ Perfect Charging / Perfect Welding / Solar Energy
Profinet Robacta TX
Profinet Robacta TX 10i
Bedienungsanleitung
DE
Roboter-Option
42,0426,0092,DE 006-30122014

0

Sehr geehrter Leser
Einleitung Wir danken Ihnen für Ihr entgegengebrachtes Vertrauen und gratulieren Ihnen zu Ihrem
technisch hochwertigen Fronius Produkt. Die vorliegende Anleitung hilft Ihnen, sich mit
diesem vertraut zu machen. Indem Sie die Anleitung sorgfältig lesen, lernen Sie die vielfältigen Möglichkeiten Ihres Fronius-Produktes kennen. Nur so können Sie seine Vorteile
bestmöglich nutzen.
Bitte beachten Sie auch die Sicherheitsvorschriften und sorgen Sie so für mehr Sicherheit
am Einsatzort des Produktes. Sorgfältiger Umgang mit Ihrem Produkt unterstützt dessen
langlebige Qualität und Zuverlässigkeit. Das sind wesentliche Voraussetzungen für hervorragende Ergebnisse.
DE
1

2

Inhaltsverzeichnis
Allgemeines ............................................................................................................................................... 5
Grundlagen Profinet.............................................................................................................................. 5
Anwendungsbeispiel............................................................................................................................. 5
Anschlussbereich Roboter-Steuerung an der Rohrbogen-Wechselstation........................................... 6
Anordnung der Feldbus-Klemmen........................................................................................................ 6
Geräte-Stammdatei für Feldbuskoppler BK9103.................................................................................. 6
Adresseinstellungen am Feldbus-Koppler mittels DIP-Schalter ........................................................... 6
Eigenschaften der Datenübertragung ........................................................................................................ 7
Eigenschaften der Datenübertragung................................................................................................... 7
Konfigurationsparameter....................................................................................................................... 7
Steckerbelegung für Anschluss Profinet RJ 45 AIDA ........................................................................... 7
Steckerbelegung für Anschluss Versorgung +24 V AIDA 1 und 2........................................................ 7
Spannungsversorgung herstellen .............................................................................................................. 9
Sicherheit.............................................................................................................................................. 9
Möglichkeiten für die Spannungsversorgung........................................................................................ 9
Spannungsversorgung über den Anschluss Versorgung +24 V AIDA mit 2 Spannungskreisen herstel-
len ........................................................................................................................................................
Spannungsversorgung über den Anschluss Versorgung +24 V AIDA mit 1 Spannungskreis herstellen 10
Spannungsversorgung über den Anschluss externe Spannungsversorgung „A“ herstellen (nur Rob-
acta TX) ................................................................................................................................................
Roboter-Steuerung an Rohrbogen-Wechselstation anschließen............................................................... 14
Sicherheit.............................................................................................................................................. 14
Datenkabel der Roboter-Steuerung an Rohrbogen-Wechselstation anschließen ................................ 14
Ein- und Ausgangssignale Robacta TX ..................................................................................................... 15
Eingangssignale (von der Rohrbogen-Wechselstation zum Roboter) .................................................. 15
Ausgangssignale (vom Roboter zur Rohrbogen-Wechselstation) ........................................................ 15
Ein- und Ausgangssignale Robacta TX 10i .............................................................................................. 17
Eingangssignale (von der Rohrbogen-Wechselstation zum Roboter) .................................................. 17
Ausgangssignale (vom Roboter zur Rohrbogen-Wechselstation) ........................................................ 17
Signalbeschreibungen Robacta TX ........................................................................................................... 19
Signalbeschreibung Eingangssignale (von der Rohrbogen-Wechselstation zum Roboter).................. 19
Signalbeschreibung Ausgangssignale (vom Roboter zur Rohrbogen-Wechselstation)....................... 20
Signalbeschreibungen Robacta TX 10i...................................................................................................... 22
Signalbeschreibung Eingangssignale (von der Rohrbogen-Wechselstation zum Roboter).................. 22
Signalbeschreibung Ausgangssignale (vom Roboter zur Rohrbogen-Wechselstation)....................... 23
Fehlerdiagnose, Fehlerbehebung .............................................................................................................. 25
Sicherheit.............................................................................................................................................. 25
Allgemeines .......................................................................................................................................... 25
Feldbus-Status LEDs............................................................................................................................ 26
Betriebszustand LEDs .......................................................................................................................... 27
Versorgungsanzeige LEDs ................................................................................................................... 28
Diagnose Ethernet/Switch LEDs........................................................................................................... 28
Technische Daten ...................................................................................................................................... 29
BK9103 ................................................................................................................................................. 29
DE
9
11
3

4

Allgemeines
DE
Grundlagen Profinet
Anwendungsbeispiel
Profinet ist ein vom Hersteller unabhängiger, offener Feldbus-Standard für vielfältige Anwendungen in der Fertigungs-, Prozess- und Gebäudeautomation. Profinet ist sowohl für
schnelle, zeitkritische Datenübertragungen, als auch für umfangreiche und komplexe
Kommunikationsaufgaben geeignet.
(3)
(2)
(1)
(13)
(1) Kühlgerät
(2) Stromquelle
(3) Interface Stromquelle
(4) Verbindungs-Schlauchpaket
(5) Drahtvorschub
(6) Schweißbrenner
(7) Roboter
(8) Fass-Spule
(9) Rohrbogen-Wechselstation
(10) Interface Profinet
(11) Datenkabel Profinet
(12) Roboter-Steuerung
(13) Datenkabel Profinet
(4)
(11)(12) (10) (8) (7)
(9)
(5)
(6)
5

Anschlussbereich RoboterSteuerung an der
RohrbogenWechselstation
(1)
(2)
(3)
(4)
(1) Anschluss Versorgung +24 V AIDA
1
(2) Anschluss Profinet RJ 45 AIDA
(3) Anschluss Profinet RJ 45 AIDA
(4) Anschluss Versorgung +24 V AIDA
2
Anordnung der
Feldbus-Klemmen
Geräte-Stammdatei für Feldbuskoppler BK9103
Folgend die werksseitige Anordnung der Feldbus-Klemmen:
BK 9103
Es besteht die Möglichkeit, weitere Feldbus-Klemmen in ein Roboterinterface einzubauen.
Die Anzahl ist jedoch durch die Gehäusegröße limitiert.
HINWEIS! Beim Einbau weiterer Feldbus-Klemmen ändert sich das Prozessdatenbild.
Jedem Teilnehmer in einem Profinet-Netzwerk ist eine Geräte-Stammdatei zugeordnet.
Die Geräte-Stammdatei enthält alle Informationen über den Teilnehmer. Die GeräteStammdatei ist für die Netzwerk-Konfiguration erforderlich und ist im Download-Bereich
der folgenden Internet-Adresse verfügbar: http://www.beckhoff.at/
KL1408
KL1408
KL1408
KL2408
KL2612
KL9010
Adresseinstellungen am FeldbusKoppler mittels
DIP-Schalter
6
Die DIP-Schalter am Feldbus-Koppler dienen zur Auswahl von verschiedenen Adressierungsmöglichkeiten und des Profinet-Namens. Profinet-konform verhält sich das Gerät,
wenn
- die DIP-Schalter 1-8 in Stellung - OFF - geschaltet sind
- die DIP-Schalter 9 und 10 in Stellung - ON - geschaltet sind
Alle anderen Modi sind als Option möglich.
HINWEIS! Um sicherzustellen, dass der Feldbus-Koppler nach einer Änderung
die Adresseinstellungen übernimmt, den Feldbus-Koppler neu starten.

Eigenschaften der Datenübertragung
DE
Eigenschaften
der Datenübertragung
Konfigurationsparameter
Übertragungstechnik Ethernet
Netzwerk Topologie Stern, Linie
Medium Twisted-Pair-Kabel
Übertragungsrate 100 Mbit/s, Full-Duplex-Mode
Busanschluss Profinet RJ 45 AIDA
Prozessdaten-Breite 40 Bit (Standardkonfiguration)
Prozessdaten-Format Intel
Bei einigen Robotersteuerungen kann es erforderlich sein die hier beschriebenen Konfigurationsparameter anzugeben, damit das Busmodul mit dem Roboter kommunizieren
kann.
Parameter Wert
Vendor ID 01B0
Device ID 0201
Station Type fronius-tx-4-100-707
hex
hex
Steckerbelegung
für Anschluss
Profinet RJ 45
AIDA
Steckerbelegung
für Anschluss
Versorgung +24 V
AIDA 1 und 2
18
Pin Signal
1 TD+
2 TD3 RD+
456 RD78-
12345
Pin Anmerkung
1 +24 V Spannungsversorgung für Feldbus-Koppler (US1)
2 0 V Spannungsversorgung für Feldbus-Koppler (US1)
3 +24 V Spannungsversorgung für Sensoren/Aktoren - über Not-Aus-Schalter
geschaltet (US2)
7

Pin Anmerkung
4 0 V Spannungsversorgung für Sensoren/Aktoren - über Not-Aus-Schalter
geschaltet (US2)
5-
8

Spannungsversorgung herstellen
DE
Sicherheit
WARNUNG! Fehlbedienung und fehlerhaft durchgeführte Arbeiten können
schwerwiegende Personen- und Sachschäden verursachen. Alle in dieser Bedienungsanleitung angeführten Arbeiten dürfen nur von geschultem Fachpersonal
durchgeführt werden. Alle in dieser Bedienungsanleitung beschriebenen Funktionen dürfen nur von geschultem Fachpersonal angewendet werden. Alle beschriebenen Arbeiten erst durchführen und alle beschriebenen Funktionen erst
anwenden wenn folgende Dokumente vollständig gelesen und verstanden wurden:
- diese Bedienungsanleitung
- sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere
Sicherheitsvorschriften
WARNUNG! Automatisch anlaufende Maschinen können schwerwiegende Personen- und Sachschäden verursachen. Ergänzend zu dieser Bedienungsanleitung sind die Sicherheitsvorschriften des Roboter- und SchweißsystemHerstellers zu beachten. Überzeugen Sie sich zu Ihrer persönlichen Sicherheit,
dass alle Schutzmaßnahmen im Arbeitsbereich des Roboters getroffen sind und
für die Dauer Ihres Aufenthaltes in diesem Bereich auch bestehen bleiben.
WARNUNG! Ein elektrischer Schlag kann tödlich sein. Vor Beginn der Arbeiten
alle beteiligten Geräte und Komponenten
- ausschalten
- vom Stromnetz trennen
- gegen Wiedereinschalten sichern
Möglichkeiten für
die Spannungsversorgung
Spannungsversorgung über den
Anschluss Versorgung +24 V
AIDA mit 2 Spannungskreisen
herstellen
Für die Spannungsversorgung stehen folgende Möglichkeiten zur Verfügung:
Art der Spannungsversorgung Beschreibung
über Anschluss Versorgung + 24
V AIDA mit 2 Spannungskreisen
über Anschluss Versorgung + 24
V AIDA mit 1 Spannungskreis
über Anschluss externe Spannungsversorgung „A“ (nur Robacta TX)
Für die Versorgung des Interfaces über den Anschluss Versorgung +24 V AIDA mit 2
Spannungskreisen wie folgt vorgehen:
Feldbus-Koppler und Feldbus-Klemmen werden getrennt voneinander mit Spannung versorgt
Feldbus-Koppler und Feldbus-Klemmen werden gemeinsam mit nur einem Spannungskreis versorgt
Feldbus-Koppler und Feldbus-Klemmen werden gemeinsam mit nur einem Spannungskreis versorgt
9

(1)
Spannungsversorgung an Anschluss
1
Versorgung +24 V AIDA (1) anschließen
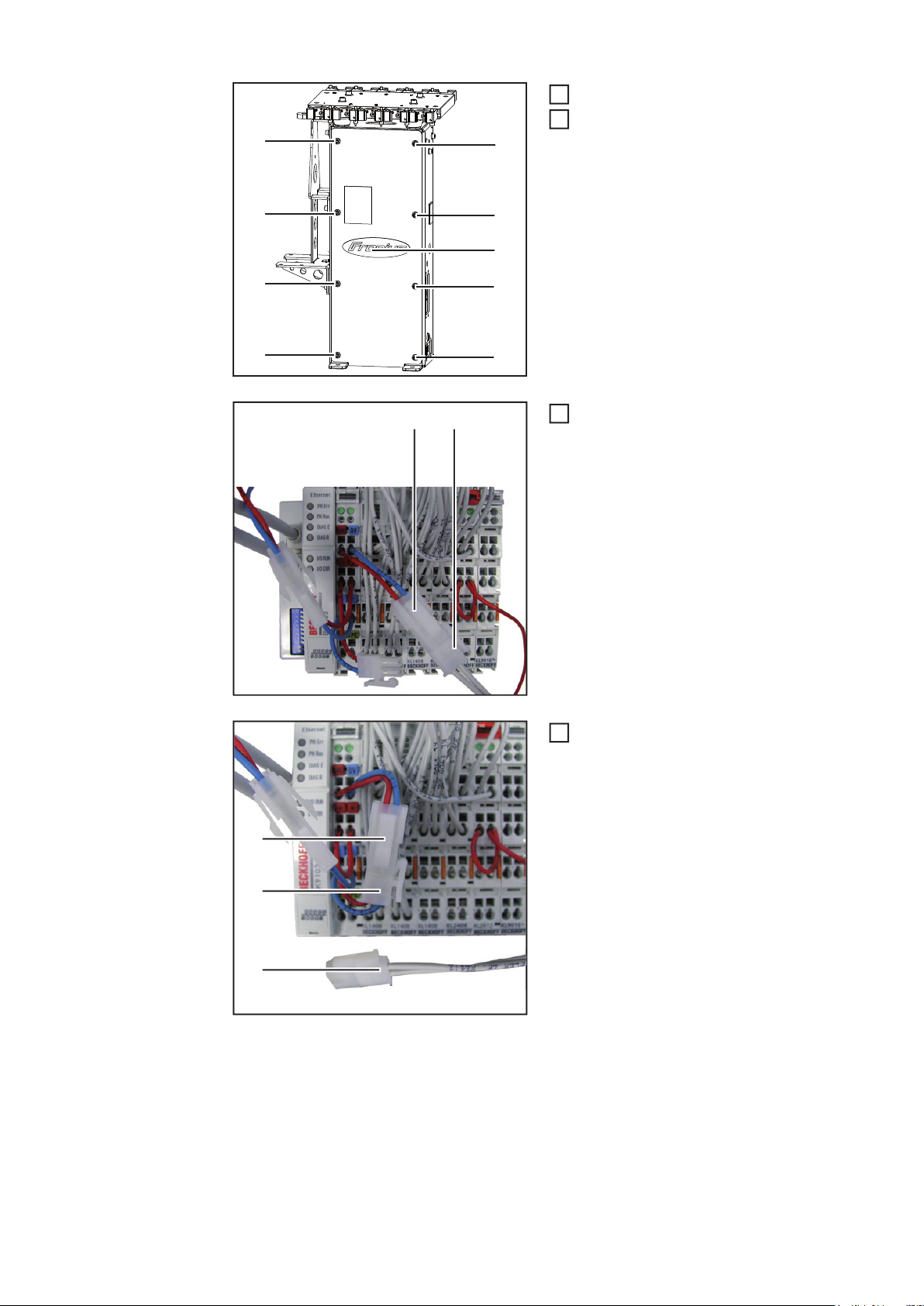
Spannungsversorgung über den
Anschluss Versorgung +24 V
AIDA mit 1 Spannungskreis herstellen
Für die Versorgung des Interfaces über den Anschluss Versorgung +24 V AIDA mit 1
Spannungskreis wie folgt vorgehen:
8 Schrauben (1) lösen
1
Deckel (2) abnehmen
2
(1)
(1)
(1)
(1)
(4)
(3)
(1)
(1)
(2)
(1)
(1)
Stecker (3) von Stecker (4) trennen
3
10

(4)
(5)
(3)
(6)
Stecker (5) an Stecker (4) anstecken
4
- Stecker (3) bleibt lose
Spannungsversorgung an den An-
5
schluss Versorgung +24 V AIDA (6)
anschließen
DE
Spannungsversorgung über den
Anschluss externe Spannungsversorgung „A“
herstellen (nur
Robacta TX)
Deckel (2) auf die Rohrbogen-Wech-
6
selstation aufsetzen
8 Schrauben (1) festschrauben
(1)
(1)
(1)
(1)
(1)
(1)
(2)
(1)
(1)
7
Für die Versorgung des Interfaces über den Anschluss externe Spannungsversorgung „A“
wie folgt vorgehen:
HINWEIS! Feldbus-Koppler und Feldbus-Klemmen werden über den Anschluss
externe Spannungsversorgung „A“ gemeinsam mit nur einem Spannungskreis
versorgt.
11
(1)
(1)
8 Schrauben (1) lösen
1
Deckel (2) abnehmen
2
(1)
(1)
(1)
(4)
(3)
(1)
(2)
(1)
(1)
Stecker (3) von Stecker (4) trennen
3
(4)
(5)
(3)
Stecker (5) an Stecker (4) anstecken
4
- Stecker (3) bleibt lose
12

(1)
(6)
(1)
Spannungsversorgung an Anschluss
5
externe Spannungsversorgung „A“ (6)
anschließen
Deckel (2) auf die Rohrbogen-Wech-
6
selstation aufsetzen
8 Schrauben (1) festschrauben
7
DE
(1)
(1)
(1)
(1)
(2)
(1)
(1)
13

Roboter-Steuerung an Rohrbogen-Wechselstation
anschließen
Sicherheit
WARNUNG! Fehlbedienung und fehlerhaft durchgeführte Arbeiten können
schwerwiegende Personen- und Sachschäden verursachen. Alle in dieser Bedienungsanleitung angeführten Arbeiten dürfen nur von geschultem Fachpersonal
durchgeführt werden. Alle in dieser Bedienungsanleitung beschriebenen Funktionen dürfen nur von geschultem Fachpersonal angewendet werden. Alle beschriebenen Arbeiten erst durchführen und alle beschriebenen Funktionen erst
anwenden wenn folgende Dokumente vollständig gelesen und verstanden wurden:
- diese Bedienungsanleitung
- sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere
Sicherheitsvorschriften
WARNUNG! Automatisch anlaufende Maschinen können schwerwiegende Personen- und Sachschäden verursachen. Ergänzend zu dieser Bedienungsanleitung sind die Sicherheitsvorschriften des Roboter- und SchweißsystemHerstellers zu beachten. Überzeugen Sie sich zu Ihrer persönlichen Sicherheit,
dass alle Schutzmaßnahmen im Arbeitsbereich des Roboters getroffen sind und
für die Dauer Ihres Aufenthaltes in diesem Bereich auch bestehen bleiben.
WARNUNG! Ein elektrischer Schlag kann tödlich sein. Vor Beginn der Arbeiten
alle beteiligten Geräte und Komponenten
- ausschalten
- vom Stromnetz trennen
- gegen Wiedereinschalten sichern
Datenkabel der
Roboter-Steuerung an RohrbogenWechselstation
anschließen
(1)
(2)
Datenkabel an Anschluss Profinet RJ
1
45 AIDA (1) anschließen
Falls vorhanden, weiteren Netz-
2
werkteilnehmer mittels Datenkabel an
Anschluss Profinet RJ 45 AIDA (2) anschließen
14

Ein- und Ausgangssignale Robacta TX
DE
Eingangssignale
(von der Rohrbogen-Wechselstation zum Roboter)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E01 Rohrbogen-Sensor 1 - High
E02 Rohrbogen-Sensor 2 - High
E03 Rohrbogen-Sensor 3 - High
E04 Rohrbogen-Sensor 4 - High
E05 Rohrbogen-Sensor 5 - High
E06 Rohrbogen-Sensor 6 - High
E07 Rohrbogen-Sensor 7 - High
E08 Rohrbogen-Sensor 8 - High
E09 Rohrbogen-Sensor 9 - High
E10 Rohrbogen-Sensor 10 - High
E11 Signal Drahtsensor - High
E12 Signal Druckschalter - High
E13 Gasdüse frei / ‘TC Ready‘ - High
E14 Gasdüse frei / Reinigungsmotor unten - High
E15 Reinigungsmotor dreht - High
E16 Trennmittel Füllstand in Ordnung - High
E17 Reinigungsmotor unten / ‘Cleaning Error‘ - High
E18 Reinigungsmotor oben - High
E19 Drahtabschneider geschlossen - High
E20 Drahtabschneider offen - High
E21 Sensor Rutsche Robacta TX - High
E22 ‘C-Sens. 4‘ Signal 1 - High
E23 Sensor 1 Abdeckung Robacta TX - High
E24 Sensor 2 Abdeckung Robacta TX - High
Ausgangssignale
(vom Roboter zur
RohrbogenWechselstation)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A01 Gasdüse spannen und Reinigungsmotor ein
/ Reinigung starten
A02 Trennmittel einsprühen - High
A03 Reinigungsmotor auf - High
A04 Drahtelektrode abschneiden - High
A05 Ventil 1 Abdeckung Robacta TX - High
A06 Ventil 2 Abdeckung Robacta TX - High
A07 ‘C-Act. 3‘ Signal 1 - High
A08 Nicht verwendet - A09 Ventil 1 Rohrbogen wechseln - High
A10 Reserve Relais OUT - A11 Nicht verwendet - A12 Nicht verwendet - A13 Nicht verwendet - -
- High
15

Lfd. Nr. Signalbezeichnung Bereich Aktivität
A14 Nicht verwendet - A15 Nicht verwendet - A16 Nicht verwendet - -
16

Ein- und Ausgangssignale Robacta TX 10i
DE
Eingangssignale
(von der Rohrbogen-Wechselstation zum Roboter)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E01 Rohrbogen-Sensor 1 - High
E02 Rohrbogen-Sensor 2 - High
E03 Rohrbogen-Sensor 3 - High
E04 Rohrbogen-Sensor 4 - High
E05 Rohrbogen-Sensor 5 - High
E06 Rohrbogen-Sensor 6 - High
E07 Rohrbogen-Sensor 7 - High
E08 Rohrbogen-Sensor 8 - High
E09 Rohrbogen-Sensor 9 - High
E10 Rohrbogen-Sensor 10 - High
E11 Signal Drahtsensor - High
E12 Nicht verwendet - E13 Gasdüse frei / ‘TC Ready‘ - High
E14 Gasdüse frei / Reinigungsmotor unten - High
E15 Reinigungsmotor dreht - High
E16 Trennmittel Füllstand in Ordnung - High
E17 Reinigungsmotor unten / ‘Cleaning Error‘ - High
E18 Reinigungsmotor oben - High
E19 Drahtabschneider geschlossen - High
E20 Drahtabschneider offen - High
E21 Sensor Rutsche - High
E22 ‘C-Sens. 4‘ Signal 1 - High
E23 Sensor 1 Abdeckung - High
E24 Sensor 2 Abdeckung - High
Ausgangssignale
(vom Roboter zur
RohrbogenWechselstation)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A01 Gasdüse spannen und Reinigungsmotor ein
/ Reinigung starten
A02 Trennmittel einsprühen - High
A03 Reinigungsmotor auf - High
A04 Drahtelektrode abschneiden - High
A05 Ventil 1 Abdeckung - High
A06 Ventil 2 Abdeckung - High
A07 ‘C-Act. 3‘ Signal 1 - High
A08 Nicht verwendet - A09 Nicht verwendet - A10 Reserve Relais OUT - A11 Nicht verwendet - A12 Nicht verwendet - A13 Nicht verwendet - -
- High
17

Lfd. Nr. Signalbezeichnung Bereich Aktivität
A14 Nicht verwendet - A15 Nicht verwendet - A16 Nicht verwendet - -
18

Signalbeschreibungen Robacta TX
DE
Signalbeschreibung Eingangssignale (von der
RohrbogenWechselstation
zum Roboter)
Lfd. Nr. Signalbezeichnung Signalbeschreibung
E01 Rohrbogen-Sensor 1 Der jeweilige Rohrbogen ist in der entspreE02 Rohrbogen-Sensor 2
E03 Rohrbogen-Sensor 3
E04 Rohrbogen-Sensor 4
E05 Rohrbogen-Sensor 5
E06 Rohrbogen-Sensor 6
E07 Rohrbogen-Sensor 7
E08 Rohrbogen-Sensor 8
E09 Rohrbogen-Sensor 9
E10 Rohrbogen-Sensor 10
E11 Signal Drahtsensor Kontrolle, ob die Drahtelektrode nach einem
E12 Signal Druckschalter Druckluft-Versorgung der Rohrbogen-Wech-
E13 Gasdüse frei / ‘TC Ready‘ Signal steht nur optional zur Verfügung.
chenden Rohrbogen-Ablage abgelegt
erfolgreichen Rohrbogen-Wechsel aus dem
Rohrbogen ragt.
selstation ist in Ordnung.
Das Signal wird ab einem Bereich von 12,5 13 bar ausgegeben.
Signal „Gasdüse frei“ nur bei Robacta Reamer
V:
- Spannvorrichtung Gasdüse des Schweißbrenner-Reinigungsgerätes hält keine
Gasdüse fest
Signal ‘TC Ready‘ nur bei Robacta TC Geräten:
- Schweißbrenner-Reinigungsgerät ist bereit
E14 Gasdüse frei / Reinigungs-
motor unten
E15 Reinigungsmotor dreht Signal steht nur optional zur Verfügung.
Signal steht nur optional zur Verfügung.
Signal „Gasdüse frei“ nur bei Robacta Reamer
V Easy:
- Spannvorrichtung Gasdüse des Schweißbrenner-Reinigungsgerätes hält keine
Gasdüse fest
Signal „Reinigungsmotor unten“ nur bei Robacta Reamer Bürstenkopf Alu:
- Reinigungsmotor ist unten
Signal „Reinigungsmotor dreht“ nur bei Robacta Reamer V:
- Reinigungsmotor dreht sich und gibt konstant Impulse aus
19

Lfd. Nr. Signalbezeichnung Signalbeschreibung
E16 Trennmittel Füllstand in
Ordnung
E17 Reinigungsmotor unten /
‘Cleaning Error‘
E18 Reinigungsmotor oben Signal steht nur optional zur Verfügung.
E19 Drahtabschneider ge-
schlossen
E20 Drahtabschneider offen Signal steht nur optional zur Verfügung.
E21 Sensor Rutsche Robacta
TX
E22 ‘C-Sens. 4‘ Signal 1 Reservesignal für Sensor
E23 Sensor 1 Abdeckung Rob-
acta TX
E24 Sensor 2 Abdeckung Rob-
acta TX
Signal steht nur optional zur Verfügung.
Signal „Trennmittel Füllstand in Ordnung“ nur
bei Robacta Reamer V:
- Trennmittel befindet sich im TrennmittelBehälter
Signal steht nur optional zur Verfügung.
Signal „Reinigungsmotor unten“ nur bei Robacta Reamer V und bei Robacta Reamer Bürstenkopf Alu:
- Reinigungsmotor ist unten
Signal ‘Cleaning Error‘ nur bei Robacta TC Geräten:
- Fehler bei der Reinigung
Signal „Reinigungsmotor oben“ nur bei Robacta Reamer V:
- Reinigungsmotor ist oben
Signal steht nur optional zur Verfügung.
- Drahtabschneider ist geschlossen
- Drahtabschneider ist offen
Signal steht nur optional zur Verfügung.
- Rohrbogen wurde in der Rutsche Robacta
TX abgelegt
Signal steht nur optional zur Verfügung.
- Abdeckung Robacta TX 1 ist offen
Signal steht nur optional zur Verfügung.
- Abdeckung Robacta TX 2 ist offen
Signalbeschreibung Ausgangssignale (vom
Roboter zur Rohrbogen-Wechselstation)
20
Lfd. Nr. Signalbezeichnung Signalbeschreibung
A01 Gasdüse spannen und Rei-
nigungsmotor ein / Reinigung starten
A02 Trennmittel einsprühen Signal steht nur optional zur Verfügung.
Signal steht nur optional zur Verfügung.
Signal „Gasdüse spannen und Reinigungsmotor ein“ nur bei Robacta Reamer V:
- Aktiviert die Spannvorrichtung Gasdüse
und den Reinigungsmotor
Signal „Reinigung starten“ bei Robacta Reamer Geräten (ausgenommen Robacta Reamer V), Robacta TC Geräten:
- Aktiviert den Reinigungsvorgang
Signal „Trennmittel einsprühen“ nur bei Robacta Reamer V:
- aktiviert das Einsprühen des Trennmittels

Lfd. Nr. Signalbezeichnung Signalbeschreibung
A03 Reinigungsmotor auf Signal steht nur optional zur Verfügung.
Signal „Reinigungsmotor auf “ nur bei Robacta
Reamer V:
- aktiviert die Aufwärtsbewegung des Reinigungsmotors
A04 Drahtelektrode abschnei-
den
A05 Ventil 1 Abdeckung Robac-
ta TX
A06 Ventil 2 Abdeckung Robac-
ta TX
A07 ‘C-Act. 3‘ Signal 1 Reservesignal für Aktor
A08 Nicht verwendet A09 Ventil 1 Rohrbogen wech-
seln
A10 Reserve Relais OUT Reservesignal für Aktor (Relaiskontakt)
A11 Nicht verwendet A12 Nicht verwendet A13 Nicht verwendet A14 Nicht verwendet A15 Nicht verwendet A16 Nicht verwendet -
Signal steht nur optional zur Verfügung.
- aktiviert den Drahtabschneider
Signal steht nur optional zur Verfügung.
- öffnet und schließt eine Abdeckung Robacta TX
Signal steht nur optional zur Verfügung.
- öffnet und schließt eine Abdeckung Robacta TX
Aktiviert den Rohrbogen-Wechsel
DE
21

Signalbeschreibungen Robacta TX 10i
Signalbeschreibung Eingangssignale (von der
RohrbogenWechselstation
zum Roboter)
Lfd. Nr. Signalbezeichnung Signalbeschreibung
E01 Rohrbogen-Sensor 1 Der jeweilige Rohrbogen ist in der entspreE02 Rohrbogen-Sensor 2
E03 Rohrbogen-Sensor 3
E04 Rohrbogen-Sensor 4
E05 Rohrbogen-Sensor 5
E06 Rohrbogen-Sensor 6
E07 Rohrbogen-Sensor 7
E08 Rohrbogen-Sensor 8
E09 Rohrbogen-Sensor 9
E10 Rohrbogen-Sensor 10
E11 Signal Drahtsensor Kontrolle, ob die Drahtelektrode nach einem
E12 Nicht verwendet E13 Gasdüse frei / ‘TC Ready‘ Signal steht nur optional zur Verfügung.
chenden Rohrbogen-Ablage abgelegt
erfolgreichen Rohrbogen-Wechsel aus dem
Rohrbogen ragt.
Signal „Gasdüse frei“ nur bei Robacta Reamer
V:
- Spannvorrichtung Gasdüse des Schweißbrenner-Reinigungsgerätes hält keine
Gasdüse fest
Signal ‘TC Ready‘ nur bei Robacta TC Geräten:
- Schweißbrenner-Reinigungsgerät ist bereit
E14 Gasdüse frei / Reinigungs-
motor unten
E15 Reinigungsmotor dreht Signal steht nur optional zur Verfügung.
E16 Trennmittel Füllstand in
Ordnung
Signal steht nur optional zur Verfügung.
Signal „Gasdüse frei“ nur bei Robacta Reamer
V Easy:
- Spannvorrichtung Gasdüse des Schweißbrenner-Reinigungsgerätes hält keine
Gasdüse fest
Signal „Reinigungsmotor unten“ nur bei Robacta Reamer Bürstenkopf Alu:
- Reinigungsmotor ist unten
Signal „Reinigungsmotor dreht“ nur bei Robacta Reamer V:
- Reinigungsmotor dreht sich und gibt konstant Impulse aus
Signal steht nur optional zur Verfügung.
Signal „Trennmittel Füllstand in Ordnung“ nur
bei Robacta Reamer V:
- Trennmittel befindet sich im TrennmittelBehälter
22

Lfd. Nr. Signalbezeichnung Signalbeschreibung
E17 Reinigungsmotor unten /
‘Cleaning Error‘
E18 Reinigungsmotor oben Signal steht nur optional zur Verfügung.
E19 Drahtabschneider ge-
schlossen
E20 Drahtabschneider offen Signal steht nur optional zur Verfügung.
E21 Sensor Rutsche Signal steht nur optional zur Verfügung.
E22 ‘C-Sens. 4‘ Signal 1 Reservesignal für Sensor
E23 Sensor 1 Abdeckung Signal steht nur optional zur Verfügung.
E24 Sensor 2 Abdeckung Signal steht nur optional zur Verfügung.
Signal steht nur optional zur Verfügung.
Signal „Reinigungsmotor unten“ nur bei Robacta Reamer V und bei Robacta Reamer Bürstenkopf Alu:
- Reinigungsmotor ist unten
Signal ‘Cleaning Error‘ nur bei Robacta TC Geräten:
- Fehler bei der Reinigung
Signal „Reinigungsmotor oben“ nur bei Robacta Reamer V:
- Reinigungsmotor ist oben
Signal steht nur optional zur Verfügung.
- Drahtabschneider ist geschlossen
- Drahtabschneider ist offen
- Rohrbogen wurde in der Rutsche abgelegt
- Abdeckung 1 ist offen
- Abdeckung 2 ist offen
DE
Signalbeschreibung Ausgangssignale (vom
Roboter zur Rohrbogen-Wechselstation)
Lfd. Nr. Signalbezeichnung Signalbeschreibung
A01 Gasdüse spannen und Rei-
nigungsmotor ein / Reinigung starten
A02 Trennmittel einsprühen Signal steht nur optional zur Verfügung.
A03 Reinigungsmotor auf Signal steht nur optional zur Verfügung.
A04 Drahtelektrode abschnei-
den
Signal steht nur optional zur Verfügung.
Signal „Gasdüse spannen und Reinigungsmotor ein“ nur bei Robacta Reamer V:
- Aktiviert die Spannvorrichtung Gasdüse
und den Reinigungsmotor
Signal „Reinigung starten“ bei Robacta Reamer Geräten (ausgenommen Robacta Reamer V), Robacta TC Geräten:
- Aktiviert den Reinigungsvorgang
Signal „Trennmittel einsprühen“ nur bei Robacta Reamer V:
- aktiviert das Einsprühen des Trennmittels
Signal „Reinigungsmotor auf “ nur bei Robacta
Reamer V:
- aktiviert die Aufwärtsbewegung des Reinigungsmotors
Signal steht nur optional zur Verfügung.
- aktiviert den Drahtabschneider
23

Lfd. Nr. Signalbezeichnung Signalbeschreibung
A05 Ventil 1 Abdeckung Signal steht nur optional zur Verfügung.
- öffnet und schließt eine Abdeckung
A06 Ventil 2 Abdeckung Signal steht nur optional zur Verfügung.
- öffnet und schließt eine Abdeckung
A07 ‘C-Act. 3‘ Signal 1 Reservesignal für Aktor
A08 Nicht verwendet A09 Nicht verwendet A10 Reserve Relais OUT Reservesignal für Aktor (Relaiskontakt)
A11 Nicht verwendet A12 Nicht verwendet A13 Nicht verwendet A14 Nicht verwendet A15 Nicht verwendet A16 Nicht verwendet -
24

Fehlerdiagnose, Fehlerbehebung
DE
Sicherheit
WARNUNG! Fehlbedienung und fehlerhaft durchgeführte Arbeiten können
schwerwiegende Personen- und Sachschäden verursachen. Alle in dieser Bedienungsanleitung angeführten Arbeiten dürfen nur von geschultem Fachpersonal
durchgeführt werden. Alle in dieser Bedienungsanleitung beschriebenen Funktionen dürfen nur von geschultem Fachpersonal angewendet werden. Alle beschriebenen Arbeiten erst durchführen und alle beschriebenen Funktionen erst
anwenden wenn folgende Dokumente vollständig gelesen und verstanden wurden:
- diese Bedienungsanleitung
- sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere
Sicherheitsvorschriften
WARNUNG! Automatisch anlaufende Maschinen können schwerwiegende Personen- und Sachschäden verursachen. Ergänzend zu dieser Bedienungsanleitung sind die Sicherheitsvorschriften des Roboter- und SchweißsystemHerstellers zu beachten. Überzeugen Sie sich zu Ihrer persönlichen Sicherheit,
dass alle Schutzmaßnahmen im Arbeitsbereich des Roboters getroffen sind und
für die Dauer Ihres Aufenthaltes in diesem Bereich auch bestehen bleiben.
WARNUNG! Ein elektrischer Schlag kann tödlich sein. Vor Beginn der Arbeiten
alle beteiligten Geräte und Komponenten
- ausschalten
- vom Stromnetz trennen
- gegen Wiedereinschalten sichern
Allgemeines
VORSICHT! Gefahr von Sachschaden beim Trennen oder Herstellen der Bus-
klemmen-Verbindungen unter Spannung. Vor dem Trennen oder Herstellen der
Busklemmen-Verbindungen, Netzverbindung trennen.
(4)
(5)
Feldbus-Koppler BK9103
HINWEIS! Nach der Fehlerbeseitigung beendet der Feldbus-Koppler in manchen
Fällen die Blinksequenz nicht. Durch Aus- und Einschalten der Versorgungsspannung oder durch einen Software Reset den Feldbus-Koppler neu starten.
(3)
(2)
(1)
(1) Betriebszustand LEDs
(2) Feldbus-Status LEDs
(3) Versorgungsanzeige LEDs
- die linke LED zeigt die Versorgung
des Feldbus-Kopplers an
- die rechte LED zeigt die Versorgung der Power-Kontakte an
(4) Diagnose Ethernet/Switch LEDs
Tritt ein Fehler auf, signalisieren die Betriebszustand LEDs oder die Felbusstatus
LEDs die Art des Fehlers und die Fehlerstelle.
(5) DIP-Schalter
25

Feldbus-Status
LEDs
Diagnose EtherNet/IP
IP Adresse OK aus 0,5 s aus aus
Keine gültige IP
Adresse (DipSchalter 9 und 10
auf ‘On‘ geschaltet)
Online aus an aus aus
Offline PLC stopp aus 0,1 s aus aus
Timeout 0,5 s aus aus aus
Konfigurationsfeh-
ler IP Adresse
Blinken abwech-
selnd (ausgelöst
durch ein Profinet
Tool)
PN Err (rot) PN Run (grün) DIAG E (rot) DIAG R (grün)
0,1 s aus aus aus
an aus aus aus
0,5 s 0,5 s aus aus
Diagnose Konfiguration
OK aus aus aus an
Falsches Modul aus aus Slot Nummer 1 mal
Fehlendes Modul
(physikalisch)
Fehlendes Modul
(in der Konfiguration)
Kein ProfinetName vergeben
Substitut* aus aus Slot Nummer 5 mal
* Substitut wird bei Modulen gesetzt die falsch konfiguriert, aber trotzdem lauffähig sind
(Beispiel: KL22xx2 konfiguriert, an dem Slot steckt aber eine KL2xx4)
HINWEIS! Treten mehrere Fehler auf, wird immer das letzte fehlerhafte Modul
gezeigt.
Beispiel für die Anzeige eines Fehlers
Eine KL2xx4 Klemme ist für den fünften Steckplatz konfiguriert, es sind aber nur 4 Module
gesteckt. Der Fehler wird wie folgt angezeigt:
1. LED DIAG E flackert schnell, LED DIAG R ist aus
2. LED DIAG E ist an, LED DIAG R zeigt den Fehler-Code - 2 mal 0,5 Sekunden blinken
3. LED DIAG E und LED DIAG R sind aus
4. LED DIAG E zeigt das Fehlerargument - 5 mal 0,5 Sekunden (hier Slot-Nummer) blinken, LED DIAG R ist aus
PN Err (rot) PN Run (grün) DIAG E (rot) DIAG R (grün)
aus aus Slot Nummer 2 mal
aus aus Slot Nummer 3 mal
aus aus aus 4 mal
26

/('',$*(
/('',$*5
DE
Betriebszustand
LEDs
Anzeige eines Fehlers
FehlerCode
ständiges,
Fehlerargument
- EMV-Probleme - Spannungsversorgung
konstantes
blinken
)HKOHU&RGH
Ursache Behebung
)HKOHUDUJXPHQW
auf Unter- oder Überspannungsspitzen überprüfen
- EMV-Maßnahmen ergreifen
- Bei einem K-Bus-Fehler,
den Fehler durch Ausund Einschalten des Buskopplers lokalisieren
1 Impuls 0 Impulse EPROM-Prüfsummenfehler Herstellereinstellung mit der
Konfigurationssoftware
KS2000 setzen
1 Impuls Überlauf im Code Buffer Weniger Busklemmen ste-
cken. Bei der programmierten
Konfiguration sind zu viele
Einträge in der Tabelle
2 Impulse Unbekannter Datentyp Software-Update des Bus-
kopplers
2 Impulse 0 Impulse Programmierte Konfiguration,
falscher Tabelleneintrag
n Impulse
(n>0)
Tabellenvergleich (Busklemme n)
Programmierte Konfiguration
auf Richtigkeit überprüfen
Falscher Tabelleneintrag
3 Impulse 0 Impulse K-Bus-Kommandofehler - Keine Busklemme ge-
steckt
- Eine der Busklemmen ist
defekt, angehängte Busklemmen halbieren und
prüfen, ob der Fehler bei
den übrigen Busklemmen
noch vorhanden ist. Vorgang wiederholen, bis die
defekte Busklemme lokalisiert ist.
27

FehlerCode
4 Impulse 0 Impulse K-Bus-Datenfehler, Bruchstel-
Fehlerargument
Ursache Behebung
Prüfen, ob die n+1 Busklemme
le hinter dem Buskoppler
richtig gesteckt ist, gegebenenfalls tauschen
n Impulse Bruchstelle hinter Busklemme nPrüfen, ob die Busklemme
9010 gesteckt ist
5 Impulse n Impulse K-Bus-Fehler bei Register-
n-te Busklemme tauschen
Kommunikation mit Bussklemme n
6 Impulse 0 Impulse Fehler bei der Initialisierung Buskoppler tauschen
1 Impulse Interner Datenfehler Buskoppler aus- und einschal-
ten
4 Impulse DIP-Schalter für BootP falsch 1-8 in Stellung -Off- stellen
8 Impulse Interner Datenfehler Buskoppler aus- und einschal-
ten
16 Impulse Fehler beim IP-Socket Buskoppler aus- und einschal-
ten
14 Impulse n Impulse n-te Busklemme hat das fal-
sche Format
Buskoppler erneut starten.
Falls der Fehler erneut auftritt,
die Busklemme tauschen.
15 Impulse n Impulse Anzahl der Busklemmen
stimmt nicht mehr
Buskoppler erneut starten.
Falls der Fehler erneut auftritt,
Herstellereinstellung mit der
Konfigurationssoftware
KS2000 setzen.
16 Impulse n Impulse Länge der K-Bus-Daten
stimmt nicht mehr
Buskoppler erneut starten.
Falls der Fehler erneut auftritt,
Herstellereinstellung mit der
Konfigurationssoftware
KS2000 setzen.
Versorgungsanzeige LEDs
Diagnose Ethernet/Switch LEDs
LED Bedeutung
Linke LED aus Buskoppler hat keine Spannung
Rechte LED aus Keine Versorgungsspannung + 24 V
an den Powerkontakten an-
DC
geschlossen
LED ein blinkt aus
Link/Act Physikalische Ver-
bindung vorhanden
Kommunikation
vorhanden
Keine physikalische Verbindung vorhanden
10 / 100 MBaud 100 MBaud - 100 MBaud
28

Technische Daten
DE
BK9103
Anzahl der Busklemmen 64 (255 mit K-Bus Erweiterung)
Digitale Peripheriesignale 256 Ein-/Ausgänge
Analoge Peripheriesignale 128 Ein-/Ausgänge
Protokolle Profinet RT (TCP-ADS für den Zu-
griff über Ethernet mit KS2000
Konfigurationssoftware)
Konfigurationsmöglichkeit über die Konfigurationsdatei
KS2000 oder die Steuerung
maximale Byteanzahl 512 Byte Eingangsdaten und 512
Byte Ausgangsdaten
Spannungsversorgung 24 VDC (-15%/+20%)
Eingangsstrom 70 mA + (ges. K-Bus Strom)/4
Einschaltstrom ca. 2,5 x Dauerstrom
K-Bus-Stromversorgung bis 1750 mA
Spannung Powerkontakt maximal 24 V
Stromlast Powerkontakt maximal 10 A
Spannungsfestigkeit 500 Veff (Powerkontakt/Versor-
gungsspannung/Feldbus)
Empfindlichkeit Vorsicherung <= 10 A
Gewicht ca. 170 g
Relative Feuchte 95 % ohne Betauung
Vibrations-/Schockfestigkeit gemäß EN 60068-2-6 / EN 60068-
2-27, EN 60068-2-29
EMV-Festigkeit/Aussendung gemäß EN 61000-6-2 / EN 61000-
6-4
Einbaulage beliebig
Schutzart IP20
DC
29

FRONIUS INTERNATIONAL GMBH
Froniusplatz 1, A-4600 Wels, Austria
Tel: +43 (0)7242 241-0, Fax: +43 (0)7242 241-3940
E-Mail: sales@fronius.com
www.fronius.com
www.fronius.com/addresses
Under http://www.fronius.com/addresses you will find all addresses
of our Sales & service partners and Locations
 Loading...
Loading...