


Fronius prints on elemental chlorine free paper (ECF) sourced from certified sustainable forests (FSC).
/ Perfect Charging / Perfect Welding / Solar Energy
OPT/i RI IO TWIN RET
Bedienungsanleitung
DE
Roboter-Option
42,0426,0380,DE 002-17122020


Inhaltsverzeichnis
Allgemeines 4
Gerätekonzept 4
Systemübersicht 5
Systemvoraussetzungen 5
Lieferumfang 5
Sicherheit 5
Technische Daten und Umgebungsbedingungen 7
Technische Daten 7
Umgebungsbedingungen 7
EtherCat-Informationen 8
Eigenschaften der Datenübertragung 8
Vergabe der EtherCAT-Adresse 8
LED-Beschreibungen 9
LEDs am BK1250 9
LEDs an EK1122 12
LEDs an CX8190 13
Interface umbauen und installieren 17
Sicherheit 17
Interface umbauen 17
Interface installieren 19
Ein- und Ausgangssignale OPT/i RI IO TWIN RET Job 21
Eingangssignale (vom Roboter zur Stromquelle) 21
Wertebereich Config Bit 22
Wertebereich Working mode 22
Wertebereich Operating mode TWIN System 22
Ausgangssignale (von der Stromquelle zum Roboter) 22
Ein- und Ausgangssignale OPT/i RI IO TWIN RET Synergic / Job 24
Eingangssignale (vom Roboter zur Stromquelle) 24
Wertebereich Config Bit 25
Wertebereich Working mode 25
Wertebereich Operating mode TWIN System 25
Ausgangssignale (von der Stromquelle zum Roboter) 26
DE
3
Allgemeines
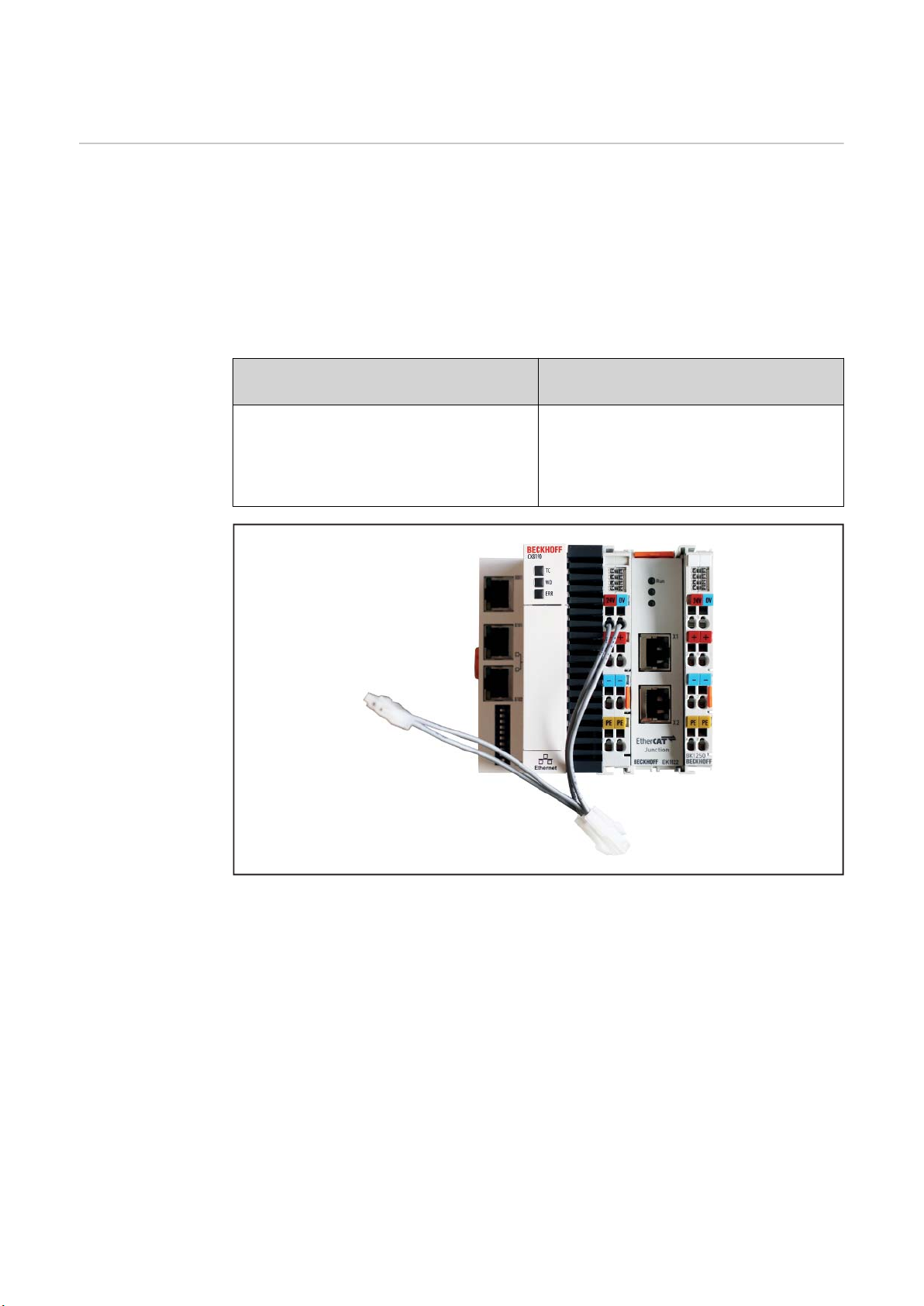
Gerätekonzept Mit dem Roboterinface OPT/i RI IO TWIN RET können die Interfaces 4,100,397 und
4,100,398 für den Betrieb mit einer TPS/i-Stromquelle umgebaut werden.
Das Roboterinface OPT/i RI IO TWIN RET setzt digitale und analoge Eingänge und
Ausgänge auf EtherCAT um.
Dadurch können Roboter-Steuerungen mit digitalen und analogen Eingängen und
Ausgängen an ein TPS/i TWIN-Schweißsystem angeschlossen werden.
Das Interface ist in den nachfolgend angeführten Ausführungen verfügbar.
4,044,054
OPT/i RI IO TWIN RET Job
dient zum Umbau von 4,100,397
für internen Betrieb und Jobbetrieb
4,044,055
OPT/i RI IO TWIN RET Synergic/Job
dient zum Umbau von 4,100,398
für internen Betrieb, Jobbetrieb und Kenn-
linienanwahl mit Vorgabe von Sollwerten
und Korrekturen möglich
4,044,054 und 4,044,055
4

Systemübersicht
(6)(5)(2) (3)(1) (4)
DE
(1) Roboter-Steuerung
(2) OPT/i RI IO TWIN RET
(3) EtherCat-Kabel zwischen RI FB PRO/i TWIN Controller und OPT/i RI IO
TWIN RET
(4) RI FB PRO/i TWIN Controller
(5) SpeedNet-Kabel zwischen RI FB PRO/i TWIN Controller und Stromquelle 1
(6) SpeedNet-Kabel zwischen RI FB PRO/i TWIN Controller und Stromquelle 2
Systemvoraussetzungen
Lieferumfang Der Lieferumfang setzt sich aus folgenden Bestandteilen zusammen:
Sicherheit
Um das Interface betreiben zu können, müssen im TPS/i-Schweißsystem folgende Komponenten vorhanden sein:
- RI FB PRO/i TWIN Controller
- RI MOD/i CC EtherCat (im RI FB PRO/i TWIN Controller verbaut)
- Interface OPT/i RI IO TWIN RET (in unterschiedlichen Ausführungen)
- EtherCat-Kabel, zur Verbidnung mit dem Twin Controller
- Dieses Dokument
- Hutschiene, zur Montage des Interfaces im Automaten- oder Roboter-Schaltschrank
- EtherCat-Kabel, zur Verbindung mit RI FB PRO/i TWIN Controller
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen nur von
▶
geschultem Fachpersonal ausgeführt werden.
Dieses Dokument lesen und verstehen.
▶
Sämtliche Bedienungsanleitungen der Systemkomponenten, insbesondere Sicher-
▶
heitsvorschriften lesen und verstehen.
5

WARNUNG!
Gefahr durch unplanmäßige Signalübertragung.
Schwerwiegende Personen- und Sachschäden können die Folge sein.
Über das Interface keine sicherheitsrelevanten Signale übertragen.
▶
6

Technische Daten und Umgebungsbedingungen
DE
Technische Daten
Umgebungsbedingungen
Versorgungsspannung + 24 V (-15 % / +20 %)
VORSICHT!
Gefahr durch unzulässige Umgebungsbedingungen.
Schwere Geräteschäden können die Folge sein.
Das Gerät nur bei den nachfolgend angegebenen Umgebungsbedingungen lagern
▶
und betreiben.
Temperaturbereich der Umgebungsluft:
- beim Betrieb: -25 °C bis + 60 °C (-13 °F bis 140 °F)
- bei Transport und Lagerung: -25 °C bis + 60 °C (-13 °F bis 140 °F)
Relative Luftfeuchtigkeit:
- bis 50 % bei 40 °C (104 °F)
- ohne Betauung bis 95 % bei 20 °C (68 °F)
Umgebungsluft: frei von Staub, Säuren, korrosiven Gasen oder Substanzen, usw.
Höhenlage über dem Meeresspiegel: bis 2000 m (6500 ft).
Das Gerät vor mechanischer Beschädigung geschützt aufbewahren/betreiben.
7

EtherCat-Informationen
Eigenschaften
der Datenübertragung
Vergabe der
EtherCATAdresse
Übertragungstechnik:
EtherCAT
Medium:
Bei der Auswahl der Kabel und Stecker ist die IEC 61784‑5‑12 für die Planung und
Installation von EtherCAT Systemen zu beachten.
Seitens Hersteller wurden die EMV-Tests mit einem original Beckhoff-Kabel
(ZK1090-9191-xxxx) durchgeführt.
Übertragungs-Geschwindigkeit:
100 Mbit/s
Busanschluss:
RJ-45 Ethernet
Application Layer:
CANopen
Die EtherCAT-Adresse wird vom Master vergeben.
8

LED-Beschreibungen
(2)
(1)
(3)
(5)
(6)
(4)
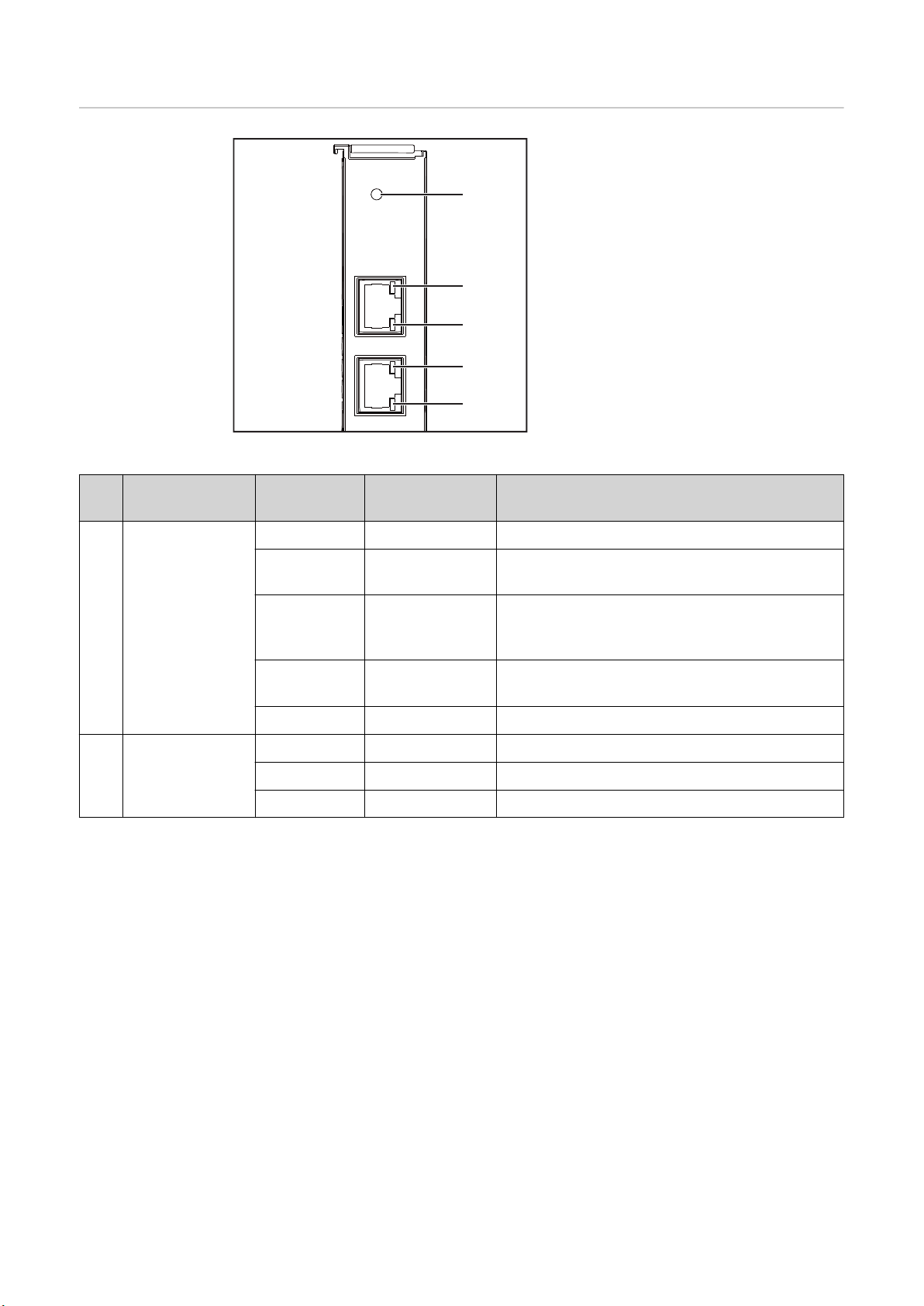
LEDs am BK1250
BK1250
DE
LED-Bezeich-
nung
(1) Run aus Init Der Buskoppler ist im Initialisierungs-Zustand
(2) Link / Act aus - keine Verbindung / Kommunikation mit dem E-
(3) Error aus - kein Fehler
(4) Spannungsver-
sorgung
Anzeige Zustand Beschreibung
blinkt Pre-Operational Der Buskoppler ist im Zustand Pre-Operational
Einzelblitz Safe-Operatio-
nal
an Operational Der Buskoppler ist im Zustand Operational
flackert Bootstrap Es wird eine Firmware geladen
blinkt linked Verbindung / Kommunikation mit dem E-Bus
blinkt Err-Operational
No Communication
aus - Keine Betriebsspannung am Buskoppler vor-
Der Buskoppler ist im Zustand Safe-Operational
Bus
hergestellt
PLC-Fehler / Lost Frames
handen
an - + 24 V DC Betriebsspannung am Buskoppler
vorhanden
(5) Power-Kontakt aus - Keine Betriebsspannung an den Power-Kontak-
ten vorhanden
an - + 24 V DC Betriebsspannung an den Power-
Kontakten vorhanden
(6) I/O-Run aus - K-Bus inaktiv
an - K-Bus aktiv
9

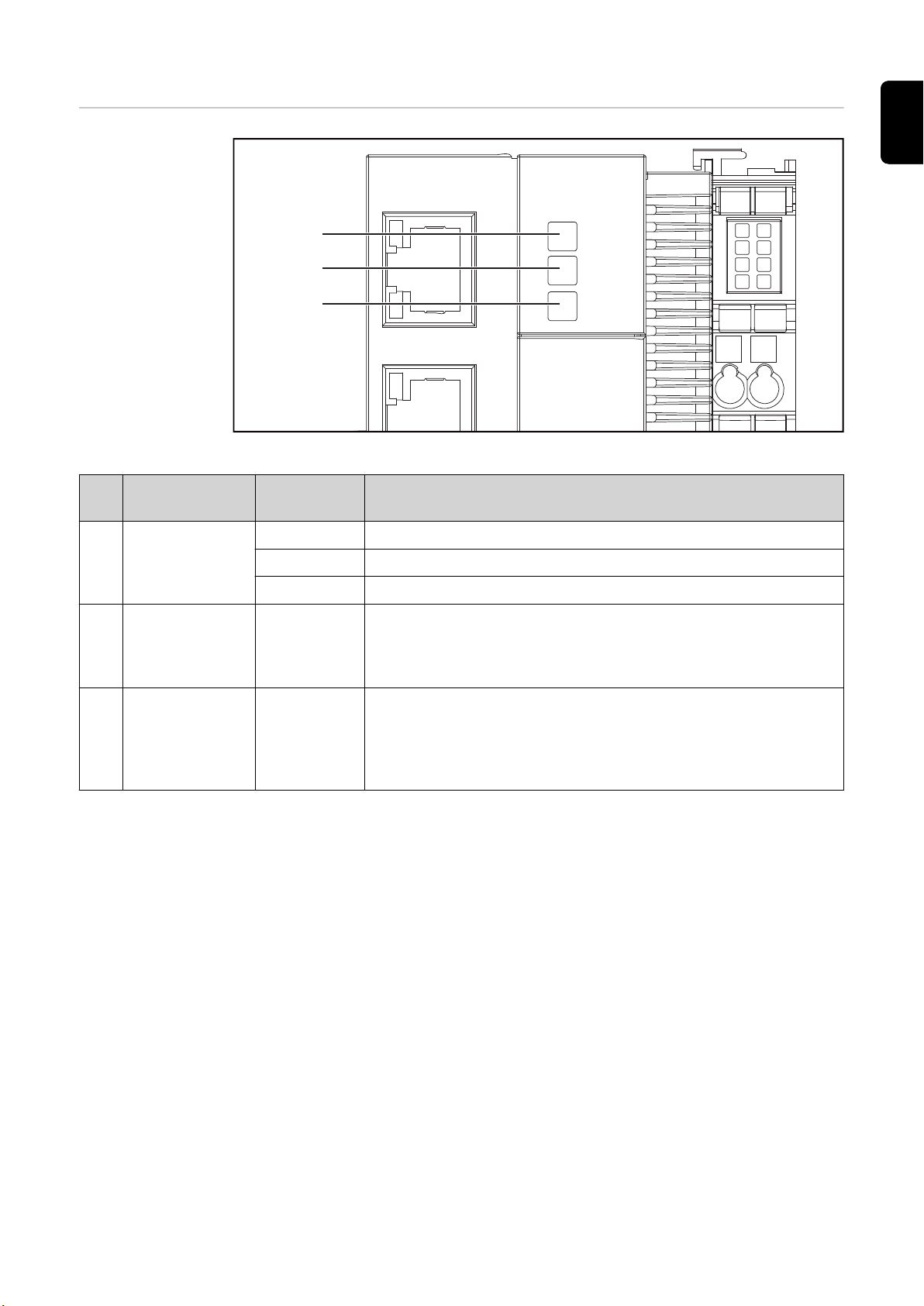
(7)
(7) LED I/O-Error
BK1250
Anzeige Fehlerar-
Beschreibung Abhilfe
gument
Ständiges,
konstantes
Blinken
EMV-Probleme - Spannungsversorgung auf Unter- oder Über-
spannungsspitzen kontrollieren
- EMV-Maßnahmen ergreifen
- Liegt ein K-Bus-Fehler vor, kann durch erneutes Starten der Fehler lokalisiert werden ((Ausund Wiedereinschalten des Kopplers)
1 Impuls 0 EEPROM-Prüfsummen-
fehler
- Herstellereinstellung mit der Konfigurationssoftware KS2000 setzen (Menü "Online ->
Koppler -> Dienste -> Herstellereinstellung")
1 Überlauf im Code Buffer - Weniger Busklemmen stecken. Bei einer pro-
grammierten Konfiguration befinden sich zu
viele Einträge in der Tabelle
2 Unbekannter Datentyp - Software Update des Buskopplers notwendig
2 Impulse 0 Programmierte Konfigura-
tion, falscher Tabellenein-
- Programmierte Konfiguration auf Richtigkeit
überprüfen
trag
n (n>0) Tabellenvergleich (Bus-
- Falscher Tabelleneintrag
klemme n)
3 Impulse 0 K-Bus-Kommandofehler - Keine Busklemme gesteckt
- Eine der Busklemmen ist defekt. Angehängte
Busklemmen halbieren und prüfen ob der Fehler bei den übrigen Busklemmen noch vorhanden ist. Dies weiter durchführen, bis die
defekte Busklemme lokalisiert ist
4 Impulse 0 K-Bus-Datenfehler, Bruch-
stelle hinter dem Buskoppler
n Bruchstelle hinter Bus-
klemme n
5 Impulse n K-Bus-Fehler bei Regis-
ter-Kommunikation mit
Busklemme n
14 Impulse n n-te Busklemme hat das
falsche Format
10
- Prüfen ob die n+1 Busklemme richtig gesteckt
ist, gegebenenfalls tauschen
- Kontrollieren ob die Busendklemme 9010
gesteckt ist
- n-te Busklemme tauschen
- Buskoppler erneut Starten. Falls der Fehler
erneut auftritt die Busklemme tauschen
(7) LED I/O-Error
Anzeige Fehlerar-
gument
15 Impulse n Anzahl der Busklemmen
16 Impulse n Länge der K-Bus-Daten
Beschreibung Abhilfe
stimmt nicht mehr
stimmt nicht mehr
DE
- Buskoppler erneut Starten. Falls der Fehler
erneut auftritt, Herstellereinstellung mit der
Konfigurationssoftware KS2000 setzen
- Buskoppler erneut Starten. Falls der Fehler
erneut auftritt, Herstellereinstellung mit der
Konfigurationssoftware KS2000 setzen
11
LEDs an EK1122
(1)
(2)
(2)
(2)
(2)
EK1122
LED-Bezeich-
Anzeige Zustand Beschreibung
nung
(1) Run aus INIT Initialisierung der Klemme
blinkt PREOP Mailbox-Kommunikation und abweichende
Standard-Einstellungen gesetzt
Einzelblitz SAFEOP Überprüfung der Kanäle des Sync-Managers
und der Distributed Clocks. Ausgänge bleiben
im sicheren Zustand
an OP normaler Betriebszustand; Mailbox- und Pro-
zessdatenkommunikation ist möglich
flackert BOOTSTRAP Funktion für Firmware-Updates der Klemme
(2) Link / Act aus - keine Verbindung auf dem EtherCAT-Strang
an linked EtherCAT-Teilnehmer angeschlossen
blinkt active Kommunikation mit EtherCAT-Teilnehmer
12
LEDs an CX8190
(1)
(2)
(3)
DE
CX8190
LED-Bezeich-
Anzeige Beschreibung
nung
(1) TC grün TwinCAT ist im Run-Modus.
rot TwinCAT ist im Stop-Modus.
blau TwinCAT ist im Konfig-Modus.
(2) WD - Keine Funktion ab Werk.
Die LED kann für anwenderspezifische Diagnosemeldungen parametriert werden.
(3) ERR rot / aus Leuchtet rot beim Einschalten und beim Laden von Software. Geht
aus, wenn alles in Ordnung ist.
Die LED kann für anwenderspezifische Diagnosemeldungen parametriert werden.
13

(4)
(6)
(5)
(7)
CX8190
LED-Bezeich-
Anzeige Beschreibung
nung
(4) Us 24V grün Spannungsversorgung für CPU-Grundmodul. LED leuchtet bei kor-
rekter Spannungsversorgung.
(5) Up 24V grün Spannungsversorgung des Klemmbuses. LED leuchtet bei korrek-
ter Spannungsversorgung.
(6) K-BUS-RUN grün Diagnose K-Bus. Die LED leuchtet bei fehlerfreiem Betrieb. Fehler-
frei bedeutet, dass auch die Kommunikation mit dem Feldbussystem fehlerfrei läuft.
(7) K-BUS-ERR rot Diagnose K-Bus. Die LED blinkt zur Fehleranzeige. Die LED blinkt
mit zwei unterschiedlichen Frequenzen (schnelle Blinken und langsames blinken).
Durch die Frequenz und Anzahl der Blinkimpulse kann der Fehlercode und das Fehlerargument ermittelt werden.
Bei dem Fehlerargument zeigt die Anzahl der Blinkimpulse die
Position der letzten Busklemme vor dem Fehler an. Passive Busklemmen, wie zum Beispiel eine Einspeiseklemme, werden nicht
mitgezählt.
Nach der Fehlerbehebung wird empfohlen, die Spannungsversorgung kurzfristig zu trennen (Reset).
14
Aufbau der Fehleranzeige:
1. Schnelles Blinken = Start der Fehlersequenz
2. Erste langsame Sequenz = Fehlercode
3. Keine Anzeige = Pause, die LED ist aus
4. Zweite langsame Sequenz = Fehlerargument
Zur Fehleridentifizierung siehe nachfolgende Tabelle.

Fehlercode Fehlerar-
gument
Beschreibung Abhilfe
DE
Ständiges,
konstantes
Blinken
3 Impulse 0 K-Bus-Kommandofehler - Keine Busklemme gesteckt
4 Impulse
5 Impulse n K-Bus-Fehler bei Regis-
6 Impulse 0 Fehler bei Initialisierung - Embedded-PC tauschen.
- EMV-Probleme - Spannungsversorgung auf Unter- oder Überspannungsspitzen überprüfen
- EMV-Maßnahmen ergreifen
- Liegt ein K-Bus-Fehler vor, kann durch erneutes Starten (trennen und wiederherstellen der
Spannungsversorgung) der Fehler lokalisiert
werden.
- Eine der Busklemmen ist defekt, angehängte
Busklemmen halbieren und prüfen ob der Fehler bei den übrigen Busklemmen noch vorhanden ist. Dieses Vorgehen wiederholen, bis die
defekte Busklemme lokalisiert ist
0 K-Bus-Datenfehler, Bruch-
stelle hinter dem Netzteil
n Bruchstelle hinter Bus-
klemme n
ter-Kommunikation mit
Busklemme n
- Sicherstellen, dass die Busendklemme 9010
gesteckt ist.
- Sicherstellen, das die Busklemme n+1 hinter
dem Netzteil richtig gesteckt ist; gegebenenfalls tauschen
- Busklemme an Stelle n tauschen
1 Interner Datenfehler - Hardware-Reset des Embedded-PCs (aus -
8 Interner Datenfehler - Hardware-Reset des Embedded-PCs (aus -
7 Impulse 0 Prozessdatenlängen der
Soll- und Ist-Konfiguration
stimmen nicht überein.
und wieder einschalten).
und wieder einschalten).
- Konfiguration und Busklemmen auf Konsistenz
prüfen.
15
16

Interface umbauen und installieren
(1)
DE
Sicherheit
Interface
umbauen
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Verletzungen und Tod können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschalten und
▶
von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Den Kabelbaum des bestehenden Interface von allen Komponenten trennen (Robo-
1
ter, externe Spannungsversorgung, ...)
Das bestehende Interface von der Hutschiene demontieren
2
Klemme KL9010 (1) demontieren und für die weitere Verwendung aufbewahren
3
17

(2)(2)(3)(6)(4) (1)
Die zwei Klemmen KL6021 (2) demontieren
4
- Die zwei Klemmen KL6021 (2) werden nicht mehr benötigt
- Die Klemme KL3064 (3) ist nicht bei allen Systemen vorhanden. Ist die Klemme
vorhanden, die Klemme nicht demontieren und weiterhin verwenden.
Die Kabel der Klemme BC9000 (4) entfernen und an der Klemme KL1250 von OPT/i
5
RI IO TWIN RET anschließen
- gleiche Anschluss-Belegung verwenden
Den Buskoppler und Klemme BC9000 (4) demontieren
6
- der Klemmenblock (6) ist nun für die Montage auf OPT/i RI IO TWIN RET (7)
fertig vorbereitet
18

(6)(7) (1)
(8)
(9)
(13)(12)
(10) (10)
(11) (11)
DE
Interface installieren
Den bestehenden Klemmenblock (6) auf OPT/i RI IO TWIN RET (7) montieren
7
Klemme KL9010 (1) auf den Klemmenblock (6) montieren
8
Nur wenn OPT/i RI IO TWIN RET mit dem Interface 4,100,398 verwendet wird:
9
a) Stecker (10) und (11) voneinander trennen
b) das Kabel von Steckplatz (12) entfernen und auf Steckplatz (13) einsetzen
c) Stecker (10) und (11) wieder zusammenstecken
Stecker (8) und (9) zusammenstecken
10
- das Interface ist nun fertig umgebaut und kann installiert werden - hierfür siehe
nächster Abschnitt
Das Interface auf einer Hutschiene montieren
1
- es wird empfohlen, dass Interface in waagrechter Position auf einer Hutschiene
in einem Automaten- oder Roboter-Schaltschrank zu montieren
- die Montage auf einer Hutschiene in nicht-waagrechter Position ist möglich. In
diesem Fall das Interface nur bis zu einer Umgebungstemperatur von maximal
+50 °C (140 °F) betreiben
Das Interface ordnungsgemäß erden
2
Den mitgelieferten Kabelbaum an das OPT/i RI IO TWIN RET und an die Roboter-
3
Steuerung anschließen
- dabei sicherstellen, dass die Signalleitungen maximal 1,5 m (4.92 ft.) lang sind
19

(1)
(2)
RI FB PRO/i TWIN Controller
Den Anschluss (1) von OPT/i RI IO TWIN RET und das Busmodul in RI FB PRO/i
4
TWIN Controller mit einem EtherCat-Kabel verbinden
- sicherstellen, dass das EtherCat-Kabel maximal 20 m (65.62 ft.) lang ist
Informationen zur Installation von RI FB PRO/i TWIN Controller der dazugehörigen
5
Bedienungsanleitung entnehmen
20

Ein- und Ausgangssignale OPT/i RI IO TWIN RET
Job
Eingangssignale
(vom Roboter zur
Stromquelle)
Klemme Anschluss Signal
1 1 Config Bit 0 0 V / 24 V
1 5 Config Bit 1 0 V / 24 V Digital Input
1 2 Config Bit 2 0 V / 24 V Digital Input
1 6 Config Bit 3 0 V / 24 V Digital Input
1 3 Config Bit 4 0 V / 24 V Digital Input
1 7 Config Bit 5 0 V / 24 V Digital Input
1 4 Config Bit 6 0 V / 24 V Digital Input
1 8 Config Bit 7 0 V / 24 V Digital Input
2 1 Welding Start 0 V / 24 V Digital Input
Signalpe-
gel
Wertebereich /
Aktivität
Siehe nachfol-
gende Tabelle
Wertebereich
Config Bit auf
Seite 22
Signalart
Digital Input
DE
2 5 Robot ready 0 V / 24 V Digital Input
2 2 Working mode Bit 0 0 V / 24 V Siehe nachfol-
2 6
Working mode Bit 1 0 V / 24 V Digital Input
2 3 Operating mode TWIN System
Bit 0
2 7 Operating mode TWIN System
Bit 1
2 4 Gas on 0 V / 24 V Digital Input
2 8 Wire forward 0 V / 24 V Digital Input
3 1 Wire backward 0 V / 24 V Digital Input
3 5 Error quit 0 V / 24 V Digital Input
3 2 Touch sensing 0 V / 24 V Digital Input
3 6 Torch blow out 0 V / 24 V Digital Input
0 V / 24 V
0 V / 24 V Digital Input
gende Tabelle
Wertebereich
Working
mode auf Seite
22
Siehe nachfol-
gende Tabelle
Wertebereich
Operating
mode TWIN
System auf
Seite 22
Digital Input
Digital Input
3 3 Welding simulation 0 V / 24 V Digital Input
3 7 Working mode Bit 2 0 V / 24 V Digital Input
3 4 Reserved
3 8 Reserved
4 1 Job number Bit 0 0 V / 24 V Digital Input
4 5 Job number Bit 1 0 V / 24 V Digital Input
21

Klemme Anschluss Signal
Signalpe-
gel
Wertebereich /
Aktivität
Signalart
4 2 Job number Bit 2 0 V / 24 V Digital Input
4 6 Job number Bit 3 0 V / 24 V Digital Input
4 3 Job number Bit 4 0 V / 24 V Digital Input
4 7 Job number Bit 5 0 V / 24 V Digital Input
4 4 Job number Bit 6 0 V / 24 V Digital Input
4 8 Job number Bit 7 0 V / 24 V Digital Input
Wertebereich
Config Bit
Wertebereich
Working mode
Config Bit
7 6 5 4 3 2 1 0 Konfiguration
0 V 0 V 0 V 0 V 0 V 0 V 0 V +24 V Retrofit Job
0 V 0 V 0 V +24 V 0 V 0 V 0 V 0 V Retrofit Synergic /
Job
Wertebereich Config Bit
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
0 0 0 0 0 Parameteranwahl intern
0 0 0 0 1 Kennlinien Betrieb Sonder 2-Takt
0 0 0 1 0 Job Betrieb
0 1 0 0 0 Kennlinien Betrieb 2-Takt
Wertebereich Betriebsart
Wertebereich
Operating mode
TWIN System
Ausgangssignale
(von der Stromquelle zum Roboter)
22
Bit 1 Bit 0 Funktion Stromquelle 1 Funktion Stromquelle 2
0 0 Single mode OFF
0 1 TWIN Lead TWIN Trail
1 0 TWIN Trail TWIN Lead
1 1 OFF Single mode
Wertebereich Betriebsart TWIN System

Klemme Anschluss Signal
5 1 Current flow 0 V / 24 V Digital Output
5 5 Process active 0 V / 24 V Digital Output
5 2 Main current signal 0 V / 24 V Digital Output
Signalpe-
gel
Wertebereich /
Aktivität
Signalart
DE
5 6
Collisionbox active 0 V / 24 V
5 3 Power source ready 0 V / 24 V Digital Output
5 7 Limitsignal, Power Source 1 + 2 0 V / 24 V Digital Output
5 4 Reserved
5 8 Reserved
0 = Kollision
oder Kabel-
bruch
Digital Output
23

Ein- und Ausgangssignale OPT/i RI IO TWIN RET
Synergic / Job
Eingangssignale
(vom Roboter zur
Stromquelle)
Klemme Anschluss Signal
1 1 Config Bit 0 0 V / 24 V
1 5 Config Bit 1 0 V / 24 V Digital Input
1 2 Config Bit 2 0 V / 24 V Digital Input
1 6 Config Bit 3 0 V / 24 V Digital Input
1 3 Config Bit 4 0 V / 24 V Digital Input
1 7 Config Bit 5 0 V / 24 V Digital Input
1 4 Config Bit 6 0 V / 24 V Digital Input
1 8 Config Bit 7 0 V / 24 V Digital Input
2 1 Welding Start 0 V / 24 V Digital Input
2 5 Robot ready 0 V / 24 V Digital Input
2 2 Working mode Bit 0 0 V / 24 V Siehe nachfol-
2 6
Working mode Bit 1 0 V / 24 V Digital Input
2 3 Operating mode TWIN System
Bit 0
2 7 Operating mode TWIN System
Bit 1
Signalpe-
gel
0 V / 24 V
0 V / 24 V Digital Input
Wertebereich /
Aktivität
Siehe nachfol-
gende Tabelle
Wertebereich
Config Bit auf
Seite 25
gende Tabelle
Wertebereich
Working
mode auf Seite
25
Siehe nachfol-
gende Tabelle
Wertebereich
Operating
mode TWIN
System auf
Seite 25
Signalart
Digital Input
Digital Input
Digital Input
2 4 Gas on 0 V / 24 V Digital Input
2 8 Wire forward 0 V / 24 V Digital Input
3 1 Wire backward 0 V / 24 V Digital Input
3 5 Error quit 0 V / 24 V Digital Input
3 2 Touch sensing 0 V / 24 V Digital Input
3 6 Torch blow out 0 V / 24 V Digital Input
3 3 Welding simulation 0 V / 24 V Digital Input
3 7 Working mode Bit 2 0 V / 24 V Digital Input
3 4 Reserved
3 8 Reserved
4 1 Job number Bit 0 0 V / 24 V Digital Input
4 5 Job number Bit 1 0 V / 24 V Digital Input
24

Klemme Anschluss Signal
Signalpe-
gel
Wertebereich /
Aktivität
Signalart
4 2 Job number Bit 2 0 V / 24 V Digital Input
4 6 Job number Bit 3 0 V / 24 V Digital Input
4 3 Job number Bit 4 0 V / 24 V Digital Input
4 7 Job number Bit 5 0 V / 24 V Digital Input
4 4 Job number Bit 6 0 V / 24 V Digital Input
4 8 Job number Bit 7 0 V / 24 V Digital Input
6 1 Power, Power Source 1 0 V - 10 V Analog Input
DE
6 5 Arclength correction, Power
source 1
0 V - 10 V Analog Input
6 2 Power, Power Source 2 0 V - 10 V Analog Input
6 6 Arclength correction, Power
source 2
Wertebereich
Config Bit
0 V - 10 V Analog Input
Config Bit
7 6 5 4 3 2 1 0 Konfiguration
0 V 0 V 0 V 0 V 0 V 0 V 0 V +24 V Retrofit Job
0 V 0 V 0 V +24 V 0 V 0 V 0 V 0 V Retrofit Synergic /
Job
Wertebereich Config Bit
Wertebereich
Bit 4 Bit 3 Bit 2 Bit 1 Bit 0 Beschreibung
Working mode
0 0 0 0 0 Parameteranwahl intern
Wertebereich
Operating mode
TWIN System
0 0 0 0 1 Kennlinien Betrieb Sonder 2-Takt
0 0 0 1 0 Job Betrieb
0 1 0 0 0 Kennlinien Betrieb 2-Takt
Wertebereich Betriebsart
Bit 1 Bit 0 Funktion Stromquelle 1 Funktion Stromquelle 2
0 0 Single mode OFF
0 1 TWIN Lead TWIN Trail
1 0 TWIN Trail TWIN Lead
1 1 OFF Single mode
Wertebereich Betriebsart TWIN System
25

Ausgangssignale
(von der Stromquelle zum Roboter)
Klemme Anschluss Signal
5 1 Current flow 0 V / 24 V Digital Output
5 5 Process active 0 V / 24 V Digital Output
5 2 Main current signal 0 V / 24 V Digital Output
5 6
Collisionbox active 0 V / 24 V
5 3 Power source ready 0 V / 24 V Digital Output
5 7 Limitsignal, Power Source 1 + 2 0 V / 24 V Digital Output
5 4 Reserved
5 8 Reserved
Signalpe-
gel
Wertebereich /
Aktivität
0 = Kollision
oder Kabel-
bruch
Signalart
Digital Output
26

DE
27

FRONIUS INTERNATIONAL GMBH
Froniusstraße 1
A-4643 Pettenbach
AUSTRIA
contact@fronius.com
www.fronius.com
Under www.fronius.com/contact you will find the addresses
of all Fronius Sales & Service Partners and locations
 Loading...
Loading...