

Page 1

Operating
Instructions
AB Profibus DP
Bedienungsanleitung
DE
Operating Instructions
EN
Instructions de service
FR
42,0410,1338 004-08032023
Page 2

Page 3

Inhaltsverzeichnis
Allgemeines 5
Sicherheit 5
Grundlagen 5
Gerätekonzept 5
Anschlüsse am Interface 5
Zusatzhinweise 6
Anwendungsbeispiel 6
AB Profibus DP anschließen und konfigurieren 7
Allgemeines 7
Sicherheit 7
Anschlüsse, Einstellmöglichkeiten und Anzeigen am Anybus-S Profbus-Busmodul 7
Übersicht 8
AB Profibus DP anschließen 9
Interface AB Profibus DP anschließen 9
Anschlussbelegung der 9-poligen Anschlussbuchse Profibus DP 9
AB Profibus DP konfigurieren 10
Geschwindigkeit der Datenübertragung (Baudrate) einstellen 10
Endschalter einstellen 10
Adress-Wahlschalter einstellen 10
Geräte-Stammdatei (GSD) 11
Allgemeines 11
Geräte-Stammdatei (GSD) HMS_1003 11
Fehlerdiagnose, Fehlerbehebung 14
Betriebszustand LEDs am Print UBST 1 14
LED „+5 V“ (1) 14
LEDs „Traffic 1 - 4“ (2) 14
LEDs „L1 - L7“ (3) 15
LED „EXT“ (4) 15
Jumper „EXT“ (5) / Jumper „INT“ (6) 15
LED „INT“ (7) 16
LED „VCC“ (8) 16
LED-Anzeige am Anybus-S Profibus-Busmodul 16
Eigenschaften der Datenübertragung 17
Eigenschaften der Datenübertragung 17
Sicherheitseinrichtung 17
Signalbeschreibung AB Profibus DP 18
Allgemeines 18
Betriebsarten der Stromquelle 18
Übersicht 18
Ein- und Ausgangssignale für MIG/MAG Standard-/Puls-Synergic und CMT 19
Eingangssignale (vom Roboter zur Stromquelle) 19
Zusätzliche Eingangssignale ‘Rob I/O’ (vom Roboter zur Stromquelle) 20
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 20
Ausgangssignale (von der Stromquelle zum Roboter) 21
Zusätzliche Ausgangssignale ‘Rob I/O’ (von der Stromquelle zum Roboter) 22
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 22
Ein- und Ausgangssignale für WIG 23
Eingangssignale (vom Roboter zur Stromquelle) 23
Zusätzliche Eingangssignale ‘Rob I/O’ (vom Roboter zur Stromquelle) 24
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 24
WIG Einstellung Puls-Bereich 24
Ausgangssignale (von der Stromquelle zum Roboter) 25
Zusätzliche Ausgangssignale ‘Rob I/O’ (von der Stromquelle zum Roboter) 26
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 26
Ein- und Ausgangssignale für CC/CV 27
Eingangssignale (vom Roboter zur Stromquelle) 27
Zusätzliche Eingangssignale ‘Rob I/O’ (vom Roboter zur Stromquelle) 28
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 28
Ausgangssignale (von der Stromquelle zum Roboter) 28
Zusätzliche Ausgangssignale ‘Rob I/O’ (von der Stromquelle zum Roboter) 29
DE
3
Page 4

Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 29
Ein- und Ausgangssignale für Standard-Manuell 31
Eingangssignale (vom Roboter zur Stromquelle) 31
Zusätzliche Eingangssignale ‘Rob I/O’ (vom Roboter zur Stromquelle) 32
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 32
Ausgangssignale (von der Stromquelle zum Roboter) 33
Zusätzliche Ausgangssignale ‘Rob I/O’ (von der Stromquelle zum Roboter) 34
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle) 34
Technische Daten 35
AB Profibus DP 35
Schaltplan AB Profibus DP 36
Schaltplan Installations-Fernbus - Profibus DP 37
4
Page 5

Allgemeines
(2)
(1)
(3) (4)
DE
Sicherheit
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
▶
▶
▶
Grundlagen Profibus
Profibus ist ein Hersteller-unabhängiger, offener Feldbus-Standard für vielfältige
Anwendungen in der Fertigungs-, Prozess und Gebäudeautomation. Profibus ist
sowohl für schnelle, zeitkritische Datenübertragungen als auch für umfangreiche
und komplexe Kommunikationsaufgaben geeignet.
Profibus DP
Profibus DP (dezentrale Peripherie) ist eine Profibus-Variante für den schnellen
Austausch von Prozessdaten.
Anybus-S Profibus-Busmodul
Das Anybus-S Profibus-Busmodul ist ein vollständiger Profibus-DP Slave. Es
enthält alle analogen und digitalen Komponenten einer leistungsfähigen Profibus-Anbindung. Ein eingebauter Mikroprozessor wickelt den gesamten Busverkehr automatisch ab.
WARNUNG!
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen
nur von technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses
Gerätes und aller Systemkomponenten lesen und verstehen.
Gerätekonzept Das Interface AB Profibus DP enthält einen Print UBST 1, auf dem ein Anybus-S
Profibus-Busmodul aufgebaut ist. Im CFM des Print UBST 1 sind alle Informationen für eine Profibus-Anbindung gespeichert.
Anschlüsse am
Interface
Anschlüsse am Interface
(1) Zugentlastung
zum Durchführen der InterbusDatenleitung und der Spannungsversorgung
(2) LocalNet Anschluss
zum Anschließen des ZwischenSchlauchpaketes
(3) LocalNet Anschluss
zum Anschließen weiterer Systemkomponenten
(4) LocalNet Anschluss
zum Anschließen weiterer Systemkomponenten
5
Page 6

Zusatzhinweise
(1) (2)
(3)
(4)
(5)
(6) (7)
(8)
(9)
(10)
Anwendungsbeispiel
HINWEIS!
Solange das Roboterinterface am LocalNet angeschlossen ist, bleibt automatisch die Betriebsart „2-Takt Betrieb“ angewählt (Anzeige: Betriebsart 2-Takt
Betrieb).
Nähere Informationen zur Betriebsart „Sonder-2-Takt Betrieb für Roboterinterface“ finden sich in den Kapiteln „MIG/MAG-Schweißen“ und „Parameter Betriebsart“ der Bedienungsanleitung Stromquelle.
(1) Stromquelle (6) Robotersteuerung
(2) Kühlgerät (7) Schweißdraht-Fass
(3) AB Profbus DP (8) Roboter
(4) Verbindungs-Schlauchpaket (9) Schweißbrenner
(5) Datenkabel Profibus (10) Drahtvorschub
6
Page 7

AB Profibus DP anschließen und konfigurieren
(1)
(2)
(3)
(4)
(5)
(6)
Allgemeines Anschließen und Konfigurieren des Interface AB Profibus DP erfolgt am Anybus-
S Profibus-Busmodul.
DE
Sicherheit
WARNUNG!
Gefahr durch Fehlbedienung und fehlerhaft durchgeführte Arbeiten.
Schwere Personen- und Sachschäden können die Folge sein.
Alle in diesem Dokument beschriebenen Arbeiten und Funktionen dürfen
▶
nur von technisch geschultem Fachpersonal ausgeführt werden.
Dieses Dokument vollständig lesen und verstehen.
▶
Sämtliche Sicherheitsvorschriften und Benutzerdokumentationen dieses
▶
Gerätes und aller Systemkomponenten lesen und verstehen.
WARNUNG!
Gefahr durch elektrischen Strom.
Schwere Personen- und Sachschäden können die Folge sein.
Vor Beginn der Arbeiten alle beteiligten Geräte und Komponenten ausschal-
▶
ten und von Stromnetz trennen.
Alle beteiligten Geräte und Komponenten gegen Wiedereinschalten sichern.
▶
Nach dem Öffnen des Gerätes mit Hilfe eines geeigneten Messgerätes si-
▶
cherstellen, dass elektrisch geladene Bauteile (beispielsweise Kondensatoren) entladen sind.
Anschlüsse, Einstellmöglichkeiten und Anzeigen am AnybusS Profbus-Busmodul
(1) Schnittstelle zum Print UBST 1 (4) Adress-Wahlschalter 10er-Stelle
(2) Anschlussbuchse Profibus DP (5) Adress-Wahlschalter 1er-Stelle
(3) Endschalter (6) LED-Anzeige
7
Page 8

Übersicht „AB Profibus DP anschließen und konfigurieren“ setzt sich aus folgenden Ab-
schnitten zusammen:
AB Profibus DP anschließen
-
AB Profibus DP konfigurieren
-
8
Page 9

AB Profibus DP anschließen
(1)
(3)
(2)
DE
Interface AB
Profibus DP anschließen
Anschlussbelegung der 9-poligen Anschlussbuchse Profibus
DP
LocalNet-Stecker vom Zwischen-
1
Schlauchpaket am Anschluss Local-Net (1) anschließen
Interface-Deckel (2) abmontieren
2
Eine der 5 Blindabdeckungen ent-
3
fernen
Profibus-Datenleitung durch die
4
Öffnung führen
Profibus-Datenleitung gemäß An-
5
schlussbelegung der 9-poligen Anschlussbuchse Profibus DP des
Anybus-S Profibus-Busmoduls anschließen
Pin 1 nicht belegt
Pin 2 nicht belegt
Pin 3 + RxD/TxD, entsprechend RS 485 Spezifikation
Pin 4
Pin 5
Pin 6
1)
RTS
GND Bus
+5 V Bus
2)
2)
Pin 7 nicht belegt
Pin 8 - RxD/TxD, entsprechend RS 485 Spezifikation
Pin 9 nicht belegt
Gehäuse Schild, Erdung (PE)
1)
mittels RTS (request to send) kann die Richtung der Datenübertragung
festgelegt werden
2)
+5 V BUS und GND BUS werden für das Busende und die externe Stromversorgung einzelner Komponenten verwendet.
9
Page 10

AB Profibus DP konfigurieren
Geschwindigkeit
der Datenübertragung
(Baudrate) einstellen
Endschalter einstellen
In einem Profibus-DP Netzwerk wird die Geschwindigkeit der Datenübertragung
mit der Konfiguration des Profibus-DP-Masters eingestellt. Bei einer Profibus-DP
Installation ist nur eine Geschwindigkeit der Datenübertragung möglich.
Das Anybus-S Profibus-Busmodul ist mit einer automatischen Erkennungsfunktion der Datenübertragungs-Geschwindigkeit ausgestattet. Der Anwender muss
die Geschwindigkeit der Datenübertragung nicht am Anybus-S Profibus-Busmodul einstellen.
Um Einflüsse auf die Datenübertragung zu verhindern, müssen die End-Teilnehmer in einem Profibus-DP Netzwerk definiert sein. Die Definition der End-Teilnehmer erfolgt am Anybus-S Profibus-Busmodul über den Endschalter:
Endschalter auf „ON“ einstellen, wenn das Anybus-S Profibus-Busmodul der erste oder der letzte Teilnehmer in einem Profibus-DP Netzwerk ist.
Endschalter auf „OFF“ einstellen, wenn:
das Anybus-S Profibus-Busmodul nicht der erste oder der letzte Teilnehmer
a)
in einem Profibus-DP Netzwerk ist,
ein externer Endschalter zur Definition der End-Teilnehmer verwendet wird.
b)
Adress-Wahlschalter einstellen
Vor der Konfiguration des Anybus-S Profibus-Busmoduls die Teilnehmer-Adresse
einstellen. Die Einstellung der Teilnehmer-Adresse erfolgt im Dezimalformat von
1 - 99 an den beiden Adress-Wahlschaltern:
am linken Adress-Wahlschalter die 10er-Stelle eingeben
-
am rechten Adress-Wahlschalter die 1er-Stelle eingeben
-
Adresse = (linke Schaltereinstellung x 10) + (rechte Schaltereinstellung x 1)
WICHTIG! Eine eingestellte Teilnehmer-Adresse kann während des Betriebes
nicht verändert werden.
10
Page 11

Geräte-Stammdatei (GSD)
Allgemeines Jedem Teilnehmer in einem Profibus-DP-Netzwerk ist eine Geräte-Stammdatei
zugeordnet. Die Geräte-Stammdatei enthält alle Informationen über den Teilnehmer. Die Geräte-Stammdatei ist für die Netzwerk-Konfiguration erforderlich
und ist im Download-Bereich der folgenden Internet-Adresse verfügbar:
http://www.hms-networks.de/products/abs_profibus.shtml (Configuration file)
DE
Geräte-Stammdatei (GSD)
HMS_1003
Profibus Device Database of HMS Industrial Networks.
Model : ANYBUS-S PDP
Description : ANYBUS-S Profibus DP slave
Language : English
Date : 12 March 2004
Author : HMS Industrial Networks AB
Profibus_DP
GSD_Revision = 2
Device identification
Vendor_Name = "HMS Industrial Networks AB"
Model_Name = "ANYBUS-S PDP"
Revision = "Version 1.5"
Ident_Number = 0x1003
Protocol_Ident = 0; DP protocol
Station_Type = 0; Slave device
FMS_supp = 0; FMS not supported
Hardware_Release = "Version 1.6"
Software_Release = "Version 1.2"
Supported baudrates
9.6_supp = 1
19.2_supp = 1
45.45_supp = 1
93.75_supp = 1
187.5_supp = 1
500_supp = 1
1.5M_supp = 1
3M_supp = 1
6M_supp = 1
12M_supp = 1
11
Page 12

Maximum responder time for supported baudrates
MaxTsdr_9.6 = 15
MaxTsdr_19.2 = 15
MaxTsdr_45.45 = 15
MaxTsdr_93.75 = 15
MaxTsdr_187.5 = 15
MaxTsdr_500 = 15
MaxTsdr_1.5M = 25
MaxTsdr_3M = 50
MaxTsdr_6M = 100
MaxTsdr_12M = 200
Supported hardware features
Redundancy = 0; not supported
Repeater_Ctrl_Sig = 2; TTL
24V_Pins = 0; not connected
Implementation_Type = "SPC3"
Supported DP features
Freeze_Mode_supp = 1; supported
Sync_Mode_supp = 1; supported
Auto_Baud_supp = 1; supported
Set_Slave_Add_supp = 0; not supported
Maximum polling frequency
Min_Slave_Intervall = 1; 100 us
Maximum supported sizes
Modular_Station = 1; modular
Max_Module = 24
Max_Input_Len = 244
Max_Output_Len = 244
Max_Data_Len = 416
Modul_Offset = 1
Fail_Safe = 0; Slave does not accept data frames with zero
data length in state CLEAR.
12
Slave_Family = 0
Max_Diag_Data_Len = 6
Definition of modules
Module = IN/OUT (EndModule)
1 Byte 0x30
Page 13

2 Byte ( 1 word) 0x70
4 Byte ( 2 word) 0x71
8 Byte ( 4 word) 0x73
16 Byte ( 8 word) 0x77
32 Byte (16 word) 0x7F
64 Byte (32 word) 0xC0,0x5F,0x5F
128 Byte (64 word) 0xC0,0x7F,0x7F
Module = INPUT (EndModule)
1 Byte 0x10
2 Byte ( 1 word) 0x50
4 Byte ( 2 word) 0x51
8 Byte ( 4 word) 0x53
16 Byte ( 8 word) 0x57
32 Byte (16 word) 0x5F
64 Byte (32 word) 0x40,0x5F
128 Byte (64 word) 0x40,,0x7F
Module = OUTPUT (EndModule)
DE
1 Byte 0x20
2 Byte ( 1 word) 0x60
4 Byte ( 2 word) 0x61
8 Byte ( 4 word) 0x63
16 Byte ( 8 word) 0x67
32 Byte (16 word) 0x6F
64 Byte (32 word) 0x80,0x5F
128 Byte (64 word) 0x80,,0x7F
13
Page 14
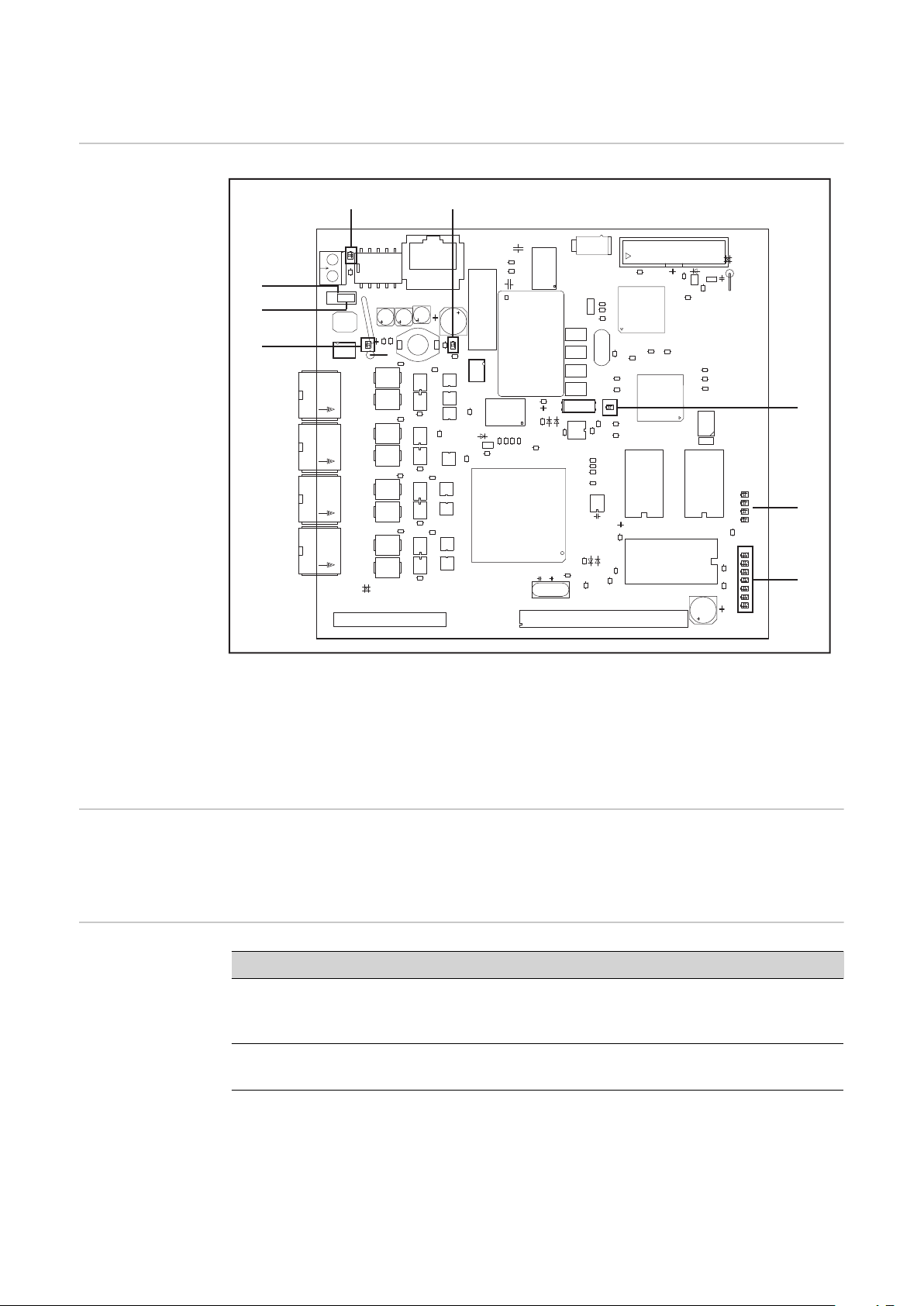
Fehlerdiagnose, Fehlerbehebung
(2)
(3)
(1)
(8)
(4)
(7)
(5)
(6)
Betriebszustand
LEDs am Print
UBST 1
(1) LED „+5 V“
(2) LEDs „Traffic 1 - 4“
(3) LEDs „L1 - L7“
(4) LED „EXT“
LED „+5 V“ (1) Die LED „+5 V“ (1) leuchtet, wenn die interne oder die externe Versorgungsspan-
LEDs „Traffic 1 4“ (2)
nung angeschlossen ist. Die LED „+5 V“ zeigt an, dass die Print-Elektronik in Ordnung ist.
LED Anzeige Bedeutung Abhilfe
Traffic X aus oder
leuchtet
Traffic X blinkt Kommunikation am Fro-
Keine Kommunikation
am Fronius LocalNet
nius LocalNet aktiv
(5) Jumper „EXT“
(6) Jumper „INT“
(7) LED „INT“
(8) LED „VCC“
Versorgungsspannung
prüfen;
Verkabelung prüfen
-
14
Page 15

LEDs „L1 - L7“
(a) (b) (c)
(3)
LED Anzeige Bedeutung Abhilfe
L1 Leuchtet /
Blinkt
Fehler im Modul aufgetreten
Siehe Fehlernummer laut
Tabelle / Servicedienst
DE
L2 Leuchtet Kommunikation am Fronius
-
LocalNet aktiv
L3 Blinkt Ethernet-Stack sendet Da-
-
ten
L6 Leuchtet Ethernet - Physikal. Verbin-
-
dung vorhanden
L7 Blinkt Ethernet-Datenübertra-
-
gung aktiv
LED „L1“ leuchtet:
Die Fehlerbeschreibung sowie die dazugehörende Display-Anzeige an der Stromquelle sind im Beiblatt ‘Roboter-Interface’ (42,0410,0616) beschrieben:
Kapitel ‘Ausgangssignale zum Roboter’, Abschnitt ‘Fehler-Nummer UBST’
LED „L1“ blinkt - Fehler wird über Blink-Code angezeigt:
(a) Schnelles Blinken:
Start des Fehlercodes
(b) Erste langsame Impulse:
Fehlerart
(c) Zweite langsame Impulse:
Fehlerstelle
Fehlercode
1 1 Max. EtherNet Framegröße über-
Fehlerargument Fehlerbeschreibung Abhilfe
Interface aus-
schritten
und einschalten
2 Falscher Mailbox-Typ -
4 UDP-Datenunterlauf auf Port 15000 -
5 UDP-Datenüberlauf -
6 UDP-Datenunterlauf auf 15001 -
7 Falscher UDP-Port -
8 Fehler bei der Stack-Initialisierung -
9 Ungültiger Funktionsaufruf -
LED „EXT“ (4) Die LED „EXT“ (4) leuchtet, wenn die externe Versorgungsspannung mittels Jum-
per „EXT“ (5) angewählt ist.
Jumper „EXT“
(5) / Jumper
„INT“ (6)
Die Jumper „EXT“ (5) und „INT“ (6) dienen zum Auswählen zwischen interner
und externer Spannungsversorgung. Im Auslieferungszustand befindet sich der
Jumper auf „externer Spannungsversorgung“.
15
Page 16

LED „INT“ (7) Die LED „INT“ (7) leuchtet, wenn die interne Versorgungsspannung mittels Jum-
(1)
(4)
(2)
(3)
per „INT“ (6) angewählt ist.
LED „VCC“ (8) Die LED „VCC“ (8) leuchtet, wenn die interne oder externe Versorgungsspannung
angeschlossen ist. Die LED „VCC“ zeigt an, dass die Spannungsversorgung + 24 V
für die Bauteil-Komponenten LocalNet-seitig in Richtung extern in Ordnung ist.
LED-Anzeige am
Anybus-S Profibus-Busmodul
Pos. Anzeige Bedeutung
(1) - nicht verwendet
(2) leuchtet grün Das Modul ist am Feldbus angeschlossen, Daten-
austausch ist möglich
leuchtet nicht Modul ist nicht am Feldbus angeschlossen
(3) leuchtet rot Das Modul ist nicht am Feldbus angeschlossen,
kein Datenaustausch möglich
leuchtet nicht Das Modul ist am Feldbus angeschlossen
(4) blinkt rot, 1 Hz Konfigurationsfehler:
die bei der Initialisierung des Moduls eingestellte
Länge für IN und/oder OUT entspricht nicht der
Länge, die bei Konfiguration des Netzwerkes eingestellt wurde
blinkt rot, 2 Hz Anwender-Datenfehler:
die bei der Initialisierung des Moduls eingestellte
Länge oder der Inhalt der Anwenderdaten entsprechen nicht der Länge oder dem Inhalt, die
bei Konfiguration des Netzwerkes eingestellt wurden.
blinkt rot, 4 Hz Fehler bei der Initialisierung des ASIC für die
Profibus-Kommunikation
leuchtet nicht Kein Fehler
16
Page 17

Eigenschaften der Datenübertragung
DE
Eigenschaften
der Datenübertragung
Sicherheitseinrichtung
Übertragungstechnik EIA RS 485
Netzwerk Topologie linearer Bus, aktiver Busanschluss an beiden Enden,
Stichleitungen sind möglich
Medium Abgeschirmtes verdrilltes Kabel Twisted Pair mit
Schirmung
Übertragungsrate 9,6 kBaud - 12 MBaud
Busanschluss 9 Pin D-Sub Buchse
Prozessdaten-Breite 112 Bit (Standardkonfiguration)
Prozessdaten-Format Motorola
Bei ausgefallener Datenübertragung werden alle Ein- und Ausgänge zurückgesetzt und die Stromquelle befindet sich im Zustand „Stop“. Nach wiederhergestellter Datenübertragung erfolgt die Wiederaufnahme des Vorganges durch folgende Signale:
Signal „Roboter ready“
-
Signal „Quellen-Störung quittieren“
-
17
Page 18

Signalbeschreibung AB Profibus DP
Allgemeines Je nach eingestellter Betriebsart kann das Interface AB Profibus DP verschie-
denste Ein- und Ausgangssignale übertragen.
Betriebsarten
der Stromquelle
Übersicht ‘Signalbeschreibung ‘AB Profibus DP’ setzt sich aus folgenden Abschnitten zu-
Betriebsart E13 E12 E11
Programm Standard 0 0 0
Programm Impuls Lichtbogen 0 0 1
Jobbetrieb 0 1 0
Parameteranwahl intern 0 1 1
Manuell 1 0 0
CC/CV 1 0 1
WIG 1 1 0
CMT / Sonderprozess 1 1 1
sammen:
Ein- und Ausgangssignale für MIG/MAG Standard-/Puls-Synergic und CMT
-
Ein- und Ausgangssignale für WIG
-
Ein- und Ausgangssignale für CC/CV
-
Ein- und Ausgangssignale für Standard-Manuell
-
18
Page 19

Ein- und Ausgangssignale für MIG/MAG Standard-/Puls-Synergic und CMT
Eingangssignale
(vom Roboter
zur Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E01 Gas Test - High
E02 Drahtvorlauf - High
E03 Drahtrücklauf - High
E04 Quellenstörung quittieren - High
E05 Positionssuchen - High
E06 Brenner ausblasen - High
E07 Nicht verwendet - -
E08 Nicht verwendet - -
E09 Schweißen Ein - High
E10 Roboter bereit - High
E11 Betriebsarten Bit 0 - High
E12 Betriebsarten Bit 1 - High
DE
E13 Betriebsarten Bit 2 - High
E14 Masterkennung Twin - High
E15 Nicht verwendet - -
E16 Nicht verwendet - -
E17 - E23 Programmnummer 0 - 127 -
E24 Schweißsimulation - High
E25 - E32 Job-Nummer 0 - 99 -
Mit RCU 5000i und in Betriebsart Jobbetrieb
E17 - E23 Job-Nummer 256 - 999 -
E24 Schweißsimulation - High
E25 - E32 Job-Nummer 0 - 255 -
Leistung (Sollwert) 0 - 65535
(0 % - 100 %)
E33 - E40 High Byte - -
E41 - E48 Low Byte - -
Lichtbogen-Längenkorrektur
(Sollwert)
0 - 65535
(-30 % - +30 %)
-
-
E49 - E56 High Byte - -
E57 - E64 Low Byte - -
E65 - E72 nicht verwendet - -
E73 - E80 Rückbrand (Sollwert) 0 - 255
(-200 - +200 ms)
-
19
Page 20

Lfd. Nr. Signalbezeichnung Bereich Aktivität
E81 - E88 nicht verwendet - -
E89 - E96
Puls- oder Dynamikkorrektur
Sollwert
*)
0 - 255
(-5 - +5 %)
E97 Synchro Puls disable - High
E98 SFI disable - High
E99
Puls- oder Dynamikkorrektur
*)
- High
disable
E100 Rückbrand disable - High
E101 Leistungs-Vollbereich (0 - 30 m) - High
E102 Nicht verwendet - -
Zusätzliche Eingangssignale ‘Rob I/O’ (vom
Roboter zur
Stromquelle)
E103 E112
Schweißgeschwindigkeit 0 - 32767
(0 - 32767 cm/
-
min)
*)
Je nach ausgewähltem Verfahren und eingestelltem Schweißprogramm
werden unterschiedliche Parameter vorgegeben:
Verfahren Parameter
Puls Pulskorrektur
Standard Dynamikkorrektur
CMT Hotstart-Zeit
Pulskorrektur
Hotstart Pulszyklen
Boost-Korrektur
Dynamikkorrektur
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Nicht verwendet - -
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
20
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E113-120 Bauteil-Nummer, Typ 1 ASCII 32 - 254 -
E121-128 Bauteil-Nummer, Typ 2 ASCII 32 - 254 -
E129-136 Bauteil-Nummer, Typ 3 ASCII 32 - 254 -
E137-144 Bauteil-Nummer, Typ 4 ASCII 32 - 254 -
E145-152 Bauteil-Nummer, Typ 5 ASCII 32 - 254 -
E153-160 Bauteil-Nummer, Typ 6 ASCII 32 - 254 -
Page 21

Lfd. Nr. Signalbezeichnung Bereich Aktivität
Ausgangssignale
(von der Stromquelle zum Roboter)
E161-168 Bauteil-Nummer, Typ 7 ASCII 32 - 254 -
E169-176 Bauteil-Nummer, Typ 8 ASCII 32 - 254 -
E177-184 Bauteil-Nummer, Typ 9 ASCII 32 - 254 -
E185-192 Bauteil-Nummer, Typ 10 ASCII 32 - 254 -
E193-200 Bauteil-Nummer, Typ 11 ASCII 32 - 254 -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A01 - A08 Fehlernummer - High
A09 Lichtbogen stabil - High
A10 Limitsignal
(nur in Verbindung mit RCU5000i)
A11 Prozess aktiv - High
A12 Hauptstrom-Signal - High
A13 Brenner-Kollisionsschutz - High
A14 Stromquelle bereit - High
- High
DE
A15 Kommunikation bereit - High
A16 Reserve - -
A17 Festbrand-Kontrolle - High
A18 Nicht verwendet - -
A19 Roboter-Zugriff
(nur in Verbindung mit RCU 5000i)
A20 Draht vorhanden - High
A21 Kurzschluss Zeitüberschreitung - High
A22 Datendokumentation bereit - High
A23 Nicht verwendet - -
A24 Leistung außerhalb Bereich - High
A25 - A32 Nicht verwendet - -
Schweißspannung (Istwert) 0 - 65535
A33 - A40 High Byte - -
A41 - A48 Low Byte - -
Schweißstrom (Istwert) 0 - 65535
- High
-
(0 - 100 V)
-
(0 - 1000 A)
A49 - A56 High Byte - -
A57 - A64 Low Byte - -
A65 - A72 Nicht verwendet - -
A73 - A80 Nicht verwendet - -
A81- A88 Nicht verwendet - -
21
Page 22

Lfd. Nr. Signalbezeichnung Bereich Aktivität
A89- A96 Motorstrom-Istwert 0 - 255 (0 - 5A)-
Zusätzliche Ausgangssignale ‘Rob I/O’ (von
der Stromquelle
zum Roboter)
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
Drahtgeschwindigkeit (Istwert) 0 - 65535
(-327,68 +327,67 m/
min)
A97 - 104 High Byte - -
A105 - 112 Low Byte - -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Nicht in Verwendung - -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A113-120 Nicht in Verwendung - -
A121-128 Nicht in Verwendung - -
A129-136 Nicht in Verwendung - -
A137-144 Nicht in Verwendung - -
-
A145-152 Nicht in Verwendung - -
A153-160 Nicht in Verwendung - -
A161-168 Nicht in Verwendung - -
A169-176 Nicht in Verwendung - -
A177-184 Nicht in Verwendung - -
A185-192 Nicht in Verwendung - -
A193-200 Nicht in Verwendung - -
22
Page 23

Ein- und Ausgangssignale für WIG
DE
Eingangssignale
(vom Roboter
zur Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E01 Gas Test - High
E02 Drahtvorlauf - High
E03 Drahtrücklauf - High
E04 Quellenstörung quittieren - High
E05 Positionssuchen - High
E06 KD disable - High
E07 Nicht verwendet - -
E08 Nicht verwendet - -
E09 Schweißen Ein - High
E10 Roboter bereit - High
E11 Betriebsarten Bit 0 - High
E12 Betriebsarten Bit 1 - High
E13 Betriebsarten Bit 2 - High
E14 Nicht verwendet - -
E15 Nicht verwendet - -
E16 Nicht verwendet - -
E17 DC / AC - High
E18 DC- / DC+ - High
E19 Kalottenbildung - High
E20 Pulsen disable - High
E21 Pulsbereichs-Auswahl Bit 0 - High
E22 Pulsbereichs-Auswahl Bit 1 - High
E23 Pulsbereichs-Auswahl Bit 2 - High
E24 Schweißsimulation - High
E25 - E32 Jobnummer 0 - 99 -
Hauptstrom-Sollwert 0 - 65535
(0 bis max.)
E33 - E40 High Byte - -
E41 - E48 Low Byte - -
Externer Parameter, Sollwert 0 - 65535 -
E49 - E56 High Byte - -
E57 - E64 Low Byte - -
-
E65 - E72 Nicht verwendet - -
E73 - E80 Duty Cycle, Sollwert 0 - 255
(10 - 90%)
E81 - E88 Nicht verwendet - -
-
23
Page 24

Lfd. Nr. Signalbezeichnung Bereich Aktivität
Zusätzliche Eingangssignale ‘Rob I/O’ (vom
Roboter zur
Stromquelle)
E89 - E96 Grundstrom-Sollwert 0 - 255
-
(0 - 100%)
E97 Nicht verwendet - -
E98 Nicht verwendet - -
E99 Grundstrom disable - High
E100 Duty Cycle disable - High
E101 - E102 Nicht verwendet - -
E103 - E112 Drahtgeschwindigkeit-Sollwert, Fd.1
Bit 0-9
0 - 1023
(0 - vD
max
-
)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Nicht verwendet - -
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
WIG Einstellung
Puls-Bereich
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E113-120 Bauteil-Nummer, Typ 1 ASCII 32 - 254 -
E121-128 Bauteil-Nummer, Typ 2 ASCII 32 - 254 -
E129-136 Bauteil-Nummer, Typ 3 ASCII 32 - 254 -
E137-144 Bauteil-Nummer, Typ 4 ASCII 32 - 254 -
E145-152 Bauteil-Nummer, Typ 5 ASCII 32 - 254 -
E153-160 Bauteil-Nummer, Typ 6 ASCII 32 - 254 -
E161-168 Bauteil-Nummer, Typ 7 ASCII 32 - 254 -
E169-176 Bauteil-Nummer, Typ 8 ASCII 32 - 254 -
E177-184 Bauteil-Nummer, Typ 9 ASCII 32 - 254 -
E185-192 Bauteil-Nummer, Typ 10 ASCII 32 - 254 -
E193-200 Bauteil-Nummer, Typ 11 ASCII 32 - 254 -
Bereichsauswahl E31 E30 E29
Puls-Bereich an der Stromquelle
0 0 0
einstellen
24
Einstellbereich Puls deaktiviert 0 0 1
0,2 - 2 Hz 0 1 0
2 - 20 Hz 0 1 1
20 - 200 Hz 1 0 0
Page 25

Bereichsauswahl E31 E30 E29
Ausgangssignale
(von der Stromquelle zum Roboter)
200 - 2000 Hz 1 0 1
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A01 - A08 Error Nummer - High
A09 Lichtbogen stabil - High
A10 Nicht verwendet - -
A11 Prozess aktiv - High
A12 Hauptstrom-Signal - High
A13 Brenner-Kollisionsschutz - High
A14 Stromquelle bereit - High
A15 Kommunikation bereit - High
A16 Reserve - -
A17 Nicht verwendet - -
A18 Hochfrequenz aktiv - High
A19 Nicht verwendet - -
DE
A20 Draht vorhanden (Kaltdraht) - High
A21 Nicht verwendet - -
A22 Nicht verwendet - -
A23 Puls High - High
A24 Nicht verwendet - -
A25 - A32 Nicht verwendet - -
Schweißspannung-Istwert 0 - 65535
(0-100 V)
A33 - A40 High Byte - -
A41 - A48 Low Byte - -
Schweißstrom-Istwert 0 - 65535
(0 - 1000 A)
A49 - A56 High Byte - -
A57 - A64 Low Byte - -
A65 - A72 Nicht verwendet - -
A73 - A80 Lichtbogen-Länge, Istwert (AVC) 0 - 255
(0 - 50 V)
-
-
-
A81 - A88 Nicht verwendet - -
A89 - A96 Motorstrom-Istwert (Kaltdraht) 0 - 255
(0 - 5 A)
A97 A104
Drahtgeschwindigkeit-Istwert (Kaltdraht)
High Byte - -
0 - 65535
(-327,68 +327,67 m/min)
-
-
25
Page 26

Lfd. Nr. Signalbezeichnung Bereich Aktivität
Zusätzliche Ausgangssignale ‘Rob I/O’ (von
der Stromquelle
zum Roboter)
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
A105A112
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Nicht in Verwendung - -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A113-120 Nicht in Verwendung - -
A121-128 Nicht in Verwendung - -
A129-136 Nicht in Verwendung - -
A137-144 Nicht in Verwendung - -
Low Byte - -
A145-152 Nicht in Verwendung - -
A153-160 Nicht in Verwendung - -
A161-168 Nicht in Verwendung - -
A169-176 Nicht in Verwendung - -
A177-184 Nicht in Verwendung - -
A185-192 Nicht in Verwendung - -
A193-200 Nicht in Verwendung - -
26
Page 27

Ein- und Ausgangssignale für CC/CV
DE
Eingangssignale
(vom Roboter
zur Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E01 Schweißen Ein - High
E02 Roboter bereit - High
E03 Betriebsarten Bit 0 - High
E04 Betriebsarten Bit 1 - High
E05 Betriebsarten Bit 2 - High
E06 Masterkennung Twin - High
E07 Nicht verwendet - -
E08 Nicht verwendet - -
E09 Gas Test - High
E10 Drahtvorlauf - High
E11 Drahtrücklauf - High
E012 Quellenstörung quittieren - High
E13 Positionssuchen - High
E14 Brenner ausblasen - High
E15 Nicht verwendet - -
E16 Nicht verwendet - -
E17 - E24 Job-Nummer 0 - 99 -
E25 - E31 Nicht verwendet - -
E32 Schweißsimulation - High
Schweißstrom (Sollwert) 0 - 65535
(0 - max.)
E33 - E40 Low Byte - -
E41 - E48 High Byte - -
Drahtgeschwindigkeit 0 - 65535
(0 - max.)
E49 - E56 Low Byte - -
E57 - E64 High Byte - -
E65 - E72 Schweißspannung 0 - 255
(0 - max.)
E73 - E80 Nicht verwendet - -
E81 - E88 Low Byte - -
E89 - E96 High Byte - -
-
-
-
E97 - E104 Nicht verwendet - -
27
Page 28

Zusätzliche Eingangssignale ‘Rob I/O’ (vom
Roboter zur
Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Nicht verwendet - -
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
Ausgangssignale
(von der Stromquelle zum Roboter)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E113-120 Bauteil-Nummer, Typ 1 ASCII 32 - 254 -
E121-128 Bauteil-Nummer, Typ 2 ASCII 32 - 254 -
E129-136 Bauteil-Nummer, Typ 3 ASCII 32 - 254 -
E137-144 Bauteil-Nummer, Typ 4 ASCII 32 - 254 -
E145-152 Bauteil-Nummer, Typ 5 ASCII 32 - 254 -
E153-160 Bauteil-Nummer, Typ 6 ASCII 32 - 254 -
E161-168 Bauteil-Nummer, Typ 7 ASCII 32 - 254 -
E169-176 Bauteil-Nummer, Typ 8 ASCII 32 - 254 -
E177-184 Bauteil-Nummer, Typ 9 ASCII 32 - 254 -
E185-192 Bauteil-Nummer, Typ 10 ASCII 32 - 254 -
E193-200 Bauteil-Nummer, Typ 11 ASCII 32 - 254 -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A01 Lichtbogen stabil - High
A02 Limit-Signal (nur in Verbindung mit
RCU 5000i)
- High
A03 Prozess aktiv - High
A04 Hauptstrom-Signal - High
A05 Brenner-Kollisionsschutz - High
A06 Stromquelle bereit - High
A07 Kommunikation bereit - High
A08 Nicht verwendet - -
A09 - A16 Error-Nummer 0 - 255 -
A17 - A24 Nicht verwendet - -
A25 Festbrand-Kontrolle - High
A26 Nicht verwendet - -
A27 Roboter-Zugriff (in Verbindung mit
RCU 5000i)
A28 Draht vorhanden - High
A29 Kurzschluss Zeitüberschreitung - High
- High
28
Page 29

Lfd. Nr. Signalbezeichnung Bereich Aktivität
A30 Daten Dokumentation bereit (nur in
Verbindung mit RCU 5000i)
A31 Nicht verwendet - -
A32 Leistung außerhalb Bereich - -
Schweißspannung-Istwert 0 - 65535
A33 - A40 Low Byte - -
A41 - A48 High Byte - -
Schweißstrom-Istwert 0 - 65535
A49 - A56 Low Byte - -
A57 - A64 High Byte - -
A65- A72 Motorstrom-Istwert 0 - 255
A73 - A80 Nicht verwendet - -
Drahtgeschwindigkeit-Istwert 0 - 65535
- High
(0 - 100 V)
(0 - 1000 A)
(0 - 5 A)
(-327,68 bis
327,67 m/min)
DE
-
-
-
-
Zusätzliche Ausgangssignale ‘Rob I/O’ (von
der Stromquelle
zum Roboter)
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
A81 - A88 Low Byte - -
A89 - A96 High Byte - -
A97 - A104 Nicht verwendet - -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Nicht in Verwendung - -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A113-120 Nicht in Verwendung - -
A121-128 Nicht in Verwendung - -
A129-136 Nicht in Verwendung - -
A137-144 Nicht in Verwendung - -
A145-152 Nicht in Verwendung - -
A153-160 Nicht in Verwendung - -
A161-168 Nicht in Verwendung - -
A169-176 Nicht in Verwendung - -
29
Page 30

Lfd. Nr. Signalbezeichnung Bereich Aktivität
A177-184 Nicht in Verwendung - -
A185-192 Nicht in Verwendung - -
A193-200 Nicht in Verwendung - -
30
Page 31

Ein- und Ausgangssignale für Standard-Manuell
DE
Eingangssignale
(vom Roboter
zur Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E01 Schweißen Ein - High
E02 Roboter bereit - High
E03 Betriebsarten Bit 0 - High
E04 Betriebsarten Bit 1 - High
E05 Betriebsarten Bit 2 - High
E06 Masterkennung Twin - High
E07 Nicht verwendet - -
E08 Nicht verwendet - -
E09 Gas Test - High
E10 Drahtvorlauf - High
E11 Drahtrücklauf - High
E12 Quellenstörung quittieren - High
E13 Positionssuchen - High
E14 Brenner ausblasen - High
E15 Nicht verwendet - -
E16 Nicht verwendet - -
E17 - E24 Nicht verwendet - -
E25 - E31 Programmnummer 0 - 127 -
E32 Schweißsimulation - High
Drahtgeschwindigkeit 0 - 65535
(-327,68 +327,67 m/min)
E33 - E40 Low Byte - -
E41 - E48 High Byte - -
Schweißspannung 0 - 65535
(0 - U
E49 - E56 Low Byte - -
E57 - E64 High Byte - -
E65- E72 Dynamikkorrektur 0 - 255
(-5 - +5 %)
E73 - E80 Rückbrand, Sollwert 0 - 255
(-200 ms - +200
ms)
max.
)
-
-
-
-
E81 - E88 Low Byte - -
E89 - E96 High Byte - -
E97 Nicht verwendet - -
E98 Nicht verwendet - -
31
Page 32

Lfd. Nr. Signalbezeichnung Bereich Aktivität
E99
Puls- oder Dynamikkorrektur*) dis-
- High
able
E100 Rückbrand disable - High
E101 Leistungs-Vollbereich (0 - 30 m) - High
E102 - 104 Nicht verwendet - -
*)
Je nach ausgewähltem Verfahren und eingestelltem Schweißprogramm
werden unterschiedliche Parameter vorgegeben:
Verfahren Parameter
Puls Pulskorrektur
Standard Dynamikkorrektur
CMT Hotstart-Zeit
Pulskorrektur
Hotstart Pulszyklen
Boost-Korrektur
Dynamikkorrektur
Zusätzliche Eingangssignale ‘Rob I/O’ (vom
Roboter zur
Stromquelle)
Zusätzliche Eingangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Nicht verwendet - -
Lfd. Nr. Signalbezeichnung Bereich Aktivität
E113-120 Bauteil-Nummer, Typ 1 ASCII 32 - 254 -
E121-128 Bauteil-Nummer, Typ 2 ASCII 32 - 254 -
E129-136 Bauteil-Nummer, Typ 3 ASCII 32 - 254 -
E137-144 Bauteil-Nummer, Typ 4 ASCII 32 - 254 -
E145-152 Bauteil-Nummer, Typ 5 ASCII 32 - 254 -
E153-160 Bauteil-Nummer, Typ 6 ASCII 32 - 254 -
E161-168 Bauteil-Nummer, Typ 7 ASCII 32 - 254 -
E169-176 Bauteil-Nummer, Typ 8 ASCII 32 - 254 -
E177-184 Bauteil-Nummer, Typ 9 ASCII 32 - 254 -
32
E185-192 Bauteil-Nummer, Typ 10 ASCII 32 - 254 -
E193-200 Bauteil-Nummer, Typ 11 ASCII 32 - 254 -
Page 33

Ausgangssignale
(von der Stromquelle zum Roboter)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A01 Lichtbogen stabil - High
A02 Limit-Signal (nur in Verbindung mit
RCU 5000i)
A03 Prozess aktiv - High
A04 Hauptstrom-Signal - High
A05 Brenner-Kollisionsschutz - High
A06 Stromquelle bereit - High
A07 Kommunikation bereit - High
A08 Nicht verwendet - -
A09 - A16 Error-Nummer 0 - 255 -
A17 - A24 Nicht verwendet - -
A25 Festbrand-Kontrolle - High
A26 Nicht verwendet - -
- High
DE
A27 Roboter-Zugriff (in Verbindung mit
RCU 5000i)
A28 Draht vorhanden - High
A29 Kurzschluss Zeitüberschreitung - High
A30 Daten Dokumentation bereit (nur in
Verbindung mit RCU 5000i)
A31 Nicht verwendet - -
A32 Leistung außerhalb Bereich - -
Schweißspannung-Istwert 0 - 65535
A33 - A40 Low Byte - -
A41 - A48 High Byte - -
Schweißstrom-Istwert 0 - 65535
A49 - A56 Low Byte - -
A57 - A64 High Byte - -
A65- A72 Motorstrom-Istwert 0 - 255
- High
- High
-
(0 - 100 V)
-
(0 - 1000 A)
-
(0 - 5 A)
A73 - A80 Nicht verwendet - -
Drahtgeschwindigkeit 0 - 65535
(-327,68 bis
327,67 m/min)
A81 - A88 Low Byte - -
A89 - A96 High Byte - -
A97 - A104 Nicht verwendet - -
-
33
Page 34

Zusätzliche Ausgangssignale ‘Rob I/O’ (von
der Stromquelle
zum Roboter)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Nicht in Verwendung - -
Zusätzliche Ausgangssignale ‘Bauteil-Nummer’ (vom Roboter zur Stromquelle)
Lfd. Nr. Signalbezeichnung Bereich Aktivität
A113-120 Nicht in Verwendung - -
A121-128 Nicht in Verwendung - -
A129-136 Nicht in Verwendung - -
A137-144 Nicht in Verwendung - -
A145-152 Nicht in Verwendung - -
A153-160 Nicht in Verwendung - -
A161-168 Nicht in Verwendung - -
A169-176 Nicht in Verwendung - -
A177-184 Nicht in Verwendung - -
A185-192 Nicht in Verwendung - -
A193-200 Nicht in Verwendung - -
34
Page 35

Technische Daten
DE
AB Profibus DP
Spannungsversorgung 24 V DC, +/- 10%
Stromaufnahme 400 mA typ.
Einbaulage an der Rückseite der
Stromquellen:
Schutzart IP23
Konfigurations-Schnittstelle über Konfigurationsmodul Feldbus
TPS 3200 / 4000 / 5000
TS 4000 / 5000
35
Page 36

Schaltplan AB Profibus DP
36
Page 37

Schaltplan Installations-Fernbus - Profibus DP
DE
37
Page 38

38
Page 39

Contents
General 41
Safety 41
Basics 41
Device concept 41
Interface connections 41
For your information 42
Application example 42
Connecting and configuring AB Profibus DP 43
General remarks 43
Safety 43
Connections, settings and displays on the Anybus S Profibus module 43
Overview 44
Connecting AB Profibus DP 45
Connecting AB Profibus DP 45
Pin assignments on the 9-pin Profibus DP connection socket 45
Configuring AB Profibus DP 46
Setting the data transmission speed (baud rate) 46
Setting the limit switch 46
Setting the address selector switch 46
Device master file (GSD) 47
General remarks 47
Device master file (GSD) HMS_1003 47
Troubleshooting 50
Operating status LEDs on the UBST 1 board 50
„+5 V“ LED (1) 50
„Traffic 1 - 4“ LEDs (2) 50
„L1 - L7“ LEDs (3) 51
„EXT“ LED (4) 51
„EXT“ jumper (5) / “INT“ jumper (6) 51
„INT“ LED (7) 52
„VCC“ LED (8) 52
LED indicator on Anybus-S Profibus module 52
Data transmission properties 53
Data transmission properties 53
Safety features 53
AB Profibus DP signal description 54
General 54
Power source modes 54
Overview 54
Input and output signals for MIG/MAG standard pulse synergic and CMT 55
Input signals (from robot to power source) 55
Additional input signals ‘Rob I/O’ (from robot to power source) 56
Additional ‘part number’ input signals (from robot to power source) 56
Output signals (from robot to power source) 57
Additional output signals ‘Rob I/O’ (from power source to robot) 58
Additional ‘part number’ output signals (from robot to power source) 58
Input and output signals for TIG 59
Input signal (from robot to power source) 59
Additional input signals ‘Rob I/O’ (from robot to power source) 60
Additional ‘part number’ input signals (from robot to power source) 60
TIG pulse range settings 60
Output signals (from power source to robot) 61
Additional output signals ‘Rob I/O’ (from power source to robot) 62
Additional ‘part number’ output signals (from robot to power source) 62
Input and output signals for CC/CV 63
Input signals (from robot to power source) 63
Additional input signals ‘Rob I/O’ (from robot to power source) 64
Additional ‘part number’ input signals (from robot to power source) 64
Output signals (from power source to robot) 64
Additional output signals ‘Rob I/O’ (from power source to robot) 65
EN
39
Page 40

Additional ‘part number’ output signals (from robot to power source) 65
Input and output signals for standard manual 67
Eingangssignale (vom Roboter zur Stromquelle) 67
Additional input signals ‘Rob I/O’ (from robot to power source) 68
Additional ‘part number’ input signals (from robot to power source) 68
Output signals (from power source to robot) 69
Additional output signals ‘Rob I/O’ (from power source to robot) 69
Additional ‘part number’ output signals (from robot to power source) 70
Technical data 71
AB Profibus DP 71
Circuit diagram AB Profibus DP 72
Remote bus installation circuit diagram - Profibus DP 73
40
Page 41

General
(2)
(1)
(3) (4)
Safety
Danger from incorrect operation and work that is not carried out properly.
This can result in serious personal injury and damage to property.
▶
▶
▶
Basics Profibus
Profibus is a manufacturer-independent open field bus standard, used in many
different applications in manufacturing, process and building automation. Profibus is suitable for rapid, time-critical data transmission, as well as extensive and
complex communication tasks.
Profibus DP
Profibus DP (decentralised periphery) is a Profibus variant for the high-speed exchange of process data.
Anybus-S profibus module
The Anybus-S profibus module is a complete Profibus-DP slave. It contains all
the analog and digital components of a powerful Profibus interface. An integral
microprocessor handles all bus traffic.
WARNING!
All the work and functions described in this document must only be carried
out by technically trained and qualified personnel.
Read and understand this document in full.
Read and understand all safety rules and user documentation for this device
and all system components.
EN
Device concept The AB Profibus DP interface includes a UBST 1 board with a piggy-backed Any-
bus-S profibus module. All the information required for a Profibus connection is
stored on the CFM on the UBST 1 board.
Interface connections
Interface connections
(1) Strain relief device
for feeding the Interbus data line and power supply
(2) LocalNet connection
for connecting the intermediate
hosepack.
(3) LocalNet connection
for connecting other system
components
(4) LocalNet connection
for connecting other system
components
41
Page 42

For your infor-
(1) (2)
(3)
(4)
(5)
(6) (7)
(8)
(9)
(10)
mation
Application example
NOTE!
While the robot interface is connected to the LocalNet, „2-step mode“ remains
selected (display: 2-step mode).
Further information on the „Special 2-step mode for robot interface“ can be
found in the sections headed „MIG/MAG welding“ and „Operating mode parameters“ in the power source operating instructions.
(1) Power source (6) Robot control
(2) Cooling unit (7) Welding wire drum
(3) AB Profbus DP (8) Robot
(4) Interconnecting hosepack (9) Welding torch
(5) Profibus data cable (10) Wirefeed speed
42
Page 43

Connecting and configuring AB Profibus DP
(1)
(2)
(3)
(4)
(5)
(6)
General remarks Connecting and configuring the AB Profibus DP interface is performed on the
Anybus-S Profibus module.
EN
Safety
WARNING!
Danger from incorrect operation and work that is not carried out properly.
This can result in serious personal injury and damage to property.
All the work and functions described in this document must only be carried
▶
out by technically trained and qualified personnel.
Read and understand this document in full.
▶
Read and understand all safety rules and user documentation for this device
▶
and all system components.
WARNING!
Danger from electrical current.
This can result in serious personal injury and damage to property.
Before starting work, switch off all devices and components involved and dis-
▶
connect them from the grid.
Secure all devices and components involved so they cannot be switched back
▶
on.
After opening the device, use a suitable measuring instrument to check that
▶
electrically charged components (such as capacitors) have been discharged.
Connections,
settings and displays on the
Anybus S Profibus module
(1) Interface to UBST 1 board (4) 10-digit address selector switch
(2) Profibus DP connection socket (5) 1-digit address selector switch
(3) Limit switch (6) LED indicator
43
Page 44

Overview „Connecting and configuring AB Profibus DP“ comprises the following sections:
Connecting AB Profibus DP
-
Configuring AB Profibus DP
-
44
Page 45

Connecting AB Profibus DP
(1)
(3)
(2)
Connecting AB
Profibus DP
Pin assignments
on the 9-pin Profibus DP connection socket
Connect LocalNet plug on inter-
1
mediate hosepack to LocalNet
connection (1)
Remove interface cover (2)
2
Remove one of the five blanking
3
covers
Feed Profibus data line through
4
the opening
Connect Profibus data line accord-
5
ing to the pin assignments of the
9-pin Profibus DP connection socket on the Anybus-S Profibus module
Pin 1 not assigned
Pin 2 not assigned
Pin 3 + RxD/TxD, according to RS 485 specification
Pin 4
Pin 5
Pin 6
1)
RTS
GND bus
+5 V bus
2)
2)
EN
Pin 7 not assigned
Pin 8 - RxD/TxD, according to RS 485 specification
Pin 9 not assigned
Housing
Label, earthing (PE)
unit
1)
2)
the data transfer direction can be set using RTS (request to send)
+5 V BUS and GND BUS are used for the bus end and for externally
powering individual components.
45
Page 46

Configuring AB Profibus DP
Setting the data
transmission
speed (baud rate)
Setting the limit
switch
Setting the address selector
switch
In a Profibus-DP network, the data transmission speed is set using the configuration of the Profibus-DP master. Only one data transmission speed is supported in
a Profibus-DP system. The Anybus-S Profibus module has an automatic facility
that detects the data transmission speed. The user does not need to set the data
transmission speed on the Anybus-S Profibus module.
To prevent data transmission being affected by external factors, the terminating
nodes in a Profibus DP network must be defined. The terminating nodes are defined on the Anybus-S Profibus module using the limit switch:
Set limit switch to „ON“ if the Anybus-S Profibus module is the first or last node
in a Profibus-DP network.
Set limit switch to „OFF“ if:
the Anybus-S Profibus module is not the first or last node in a Profibus-DP
a)
network,
an external limit switch is used to identify the terminating node.
b)
Set the node address before configuring the Anybus-S Profibus module. The
node address on both address selector switches is set between 1 and 99 in decimal format:
enter the tens digit on the left-hand address selector switch
-
enter the units digit on the right-hand address selector switch
-
Address = (left-hand switch setting x 10) + (right-hand switch setting x 1)
IMPORTANT! A set node address cannot be changed during operation.
46
Page 47

Device master file (GSD)
General remarks A device master file is assigned to every node in a Profibus-DP network. The de-
vice master file contains all the information about the node. It is required for network configuration and can be downloaded from the following website:
http://www.hms-networks.de/products/abs_profibus.shtml (Configuration file)
EN
Device master
file (GSD)
HMS_1003
Profibus Device Database of HMS Industrial Networks.
Model : ANYBUS-S PDP
Description : ANYBUS-S Profibus DP slave
Language : English
Date : 12 March 2004
Author : HMS Industrial Networks AB
Profibus_DP
GSD_Revision = 2
Device identification
Vendor_Name = "HMS Industrial Networks AB"
Model_Name = "ANYBUS-S PDP"
Revision = "Version 1.5"
Ident_Number = 0x1003
Protocol_Ident = 0; DP protocol
Station_Type = 0; Slave device
FMS_supp = 0; FMS not supported
Hardware_Release = "Version 1.6"
Software_Release = "Version 1.2"
Supported baudrates
9.6_supp = 1
19.2_supp = 1
45.45_supp = 1
93.75_supp = 1
187.5_supp = 1
500_supp = 1
1.5M_supp = 1
3M_supp = 1
6M_supp = 1
12M_supp = 1
Maximum responder time for supported baudrates
47
Page 48

MaxTsdr_9.6 = 15
MaxTsdr_19.2 = 15
MaxTsdr_45.45 = 15
MaxTsdr_93.75 = 15
MaxTsdr_187.5 = 15
MaxTsdr_500 = 15
MaxTsdr_1.5M = 25
MaxTsdr_3M = 50
MaxTsdr_6M = 100
MaxTsdr_12M = 200
Supported hardware features
Redundancy = 0; not supported
Repeater_Ctrl_Sig = 2; TTL
24V_Pins = 0; not connected
Implementation_Type = "SPC3"
Supported DP features
Freeze_Mode_supp = 1; supported
Sync_Mode_supp = 1; supported
Auto_Baud_supp = 1; supported
Set_Slave_Add_supp = 0; not supported
Maximum polling frequency
Min_Slave_Intervall = 1; 100 us
Maximum supported sizes
Modular_Station = 1; modular
Max_Module = 24
Max_Input_Len = 244
Max_Output_Len = 244
Max_Data_Len = 416
Modul_Offset = 1
Fail_Safe = 0; Slave does not accept data frames with zero
data length in state CLEAR.
Slave_Family = 0
48
Max_Diag_Data_Len = 6
Definition of modules
Module = IN/OUT (EndModule)
1 Byte 0x30
2 Byte ( 1 word) 0x70
Page 49

4 Byte ( 2 word) 0x71
8 Byte ( 4 word) 0x73
16 Byte ( 8 word) 0x77
32 Byte (16 word) 0x7F
64 Byte (32 word) 0xC0,0x5F,0x5F
128 Byte (64 word) 0xC0,0x7F,0x7F
Module = INPUT (EndModule)
1 Byte 0x10
2 Byte ( 1 word) 0x50
4 Byte ( 2 word) 0x51
8 Byte ( 4 word) 0x53
16 Byte ( 8 word) 0x57
32 Byte (16 word) 0x5F
64 Byte (32 word) 0x40,0x5F
128 Byte (64 word) 0x40,,0x7F
Module = OUTPUT (EndModule)
1 Byte 0x20
2 Byte ( 1 word) 0x60
4 Byte ( 2 word) 0x61
8 Byte ( 4 word) 0x63
EN
16 Byte ( 8 word) 0x67
32 Byte (16 word) 0x6F
64 Byte (32 word) 0x80,0x5F
128 Byte (64 word) 0x80,,0x7F
49
Page 50

Troubleshooting
(2)
(3)
(1)
(8)
(4)
(7)
(5)
(6)
Operating status
LEDs on the
UBST 1 board
(1) „+5 V“ LED
(2) „Traffic 1 - 4“ LEDs
(3) „L1 - L7“ LEDs
(4) „EXT“ LED
„+5 V“ LED (1) The „+5 V“ LED (1) comes on when the internal or external power supply is con-
„Traffic 1 - 4“
LEDs (2)
nected. The „+5 V“ LED indicates that the board electronics are OK.
LED Indicator Meaning Remedy
Traffic X Off or on No communication on
Fronius LocalNet
Traffic X Flashing Communication on the
Fronius LocalNet active
(5) „EXT“ jumper
(6) „INT“ jumper
(7) „INT“ LED
(8) „VCC“ LED
Check supply voltage;
Check cabling
-
50
Page 51

„L1 - L7“ LEDs
(a) (b) (c)
(3)
LED Indicator Meaning Remedy
L1 On/flashing Error occurred in module See error number in table/
after sales service
L2 On Communication on the
-
Fronius LocalNet is active
L3 Flashing Ethernet stack sending da-ta-
L6 On Ethernet - physical con-
-
nection present
L7 Flashing Ethernet data transmission
-
active
„L1“ LED on:
The error description and the corresponding display on the power source are described in the „Robot interface“ leaflet (42,0410,0616):
chapter entitled „Output signals to robot“, section „Error number UBST“
„L1“ LED flashing - error is communicated using the flash code:
(a) Rapid flashing:
Start of the error code
(b) First slow pulse:
Type of error
(c) Second slow pulse:
Error location
EN
Error
code
Error argument Error description Remedy
1 1 Max. Ethernet frame size exceeded Switch interface
off and on again
2 Incorrect mailbox type -
4 UDP data underflow on port 15000 -
5 UDP data overflow -
6 UDP data underflow on port 15001 -
7 Incorrect UDP port -
8 Error during stack initialisation -
9 Invalid function -
„EXT“ LED (4) The „EXT“ LED (4) comes on if the external supply voltage is selected using the
„EXT“ jumper (5).
„EXT“ jumper
(5) / “INT“ jum-
The „EXT“ (5) and „INT“ (6) jumpers are for choosing between an internal and external power supply. The jumper is set in the factory to „external power supply“.
per (6)
51
Page 52

„INT“ LED (7) The „INT“ LED (7) comes on if the internal supply voltage is selected using „INT“
(1)
(4)
(2)
(3)
jumper (6).
„VCC“ LED (8) The „VCC“ LED (8) comes on when the internal or external power supply is con-
nected. The „VCC“ LED indicates that the + 24 V power supply for the modules
on the LocalNet side is OK.
LED indicator on
Anybus-S Profibus module
LED Indicator Meaning
(1) - not used
(2) lights up green The module is connected to the field bus, data
can be transmitted
does not light up Module is not connected to the field bus
(3) lights up red he module is not connected to the field bus, data
cannot be transmitted
does not light up The module is connected to the field bus
(4) flashing red, 1 Hz Configuration error:
The length that was set for IN and/or OUT during
module initialisation does not match that set during network configuration
flashing red, 2 Hz User data error:
The length that was set during module initialisation, or the content of the user data, does not
match the length or content set during network
configuration.
flashing red, 4 Hz Error during initialisation of the ASIC for Profi-
bus communication
does not light up No error
52
Page 53

Data transmission properties
Data transmission properties
Safety features If there is no data transmission, all inputs and outputs are reset and the power
Transmission technology EIA RS 485
Network topology linear bus, active bus connection at both ends,
spur lines are possible
Medium Screened twisted-pair cable
Transmission rate 9.6 kBaud - 12 MBaud
Bus connection 9 pin D-sub socket
Process data width 112 bits (standard configuration)
Process data format Motorola
source goes into „Stop“. Once data transmission has been re-established, the following signals resume the process:
“Robot ready” signal
-
„Source error reset“ signal
-
EN
53
Page 54

AB Profibus DP signal description
General Depending on the selected mode, the AB Profibus DP interface can transfer nu-
merous kinds of input and output signals.
Power source
modes
Overview „AB Profibus DP signal description“ is composed of the following sections:
Mode E13 E12 E11
MIG/MAG standard synergic welding 0 0 0
MIG/MAG pulse synergic welding 0 0 1
Job mode 0 1 0
Parameter selection internal 0 1 1
MIG/MAG standard manual welding 1 0 0
CC/CV 1 0 1
TIG welding 1 1 0
CMT/special process 1 1 1
Input and output signals for MIG/MAG standard pulse synergic and CMT
-
Input and output signals for TIG
-
Input and output signals for CC/CV
-
Input and output signals for standard manual
-
54
Page 55

Input and output signals for MIG/MAG standard
pulse synergic and CMT
Input signals
(from robot to
power source)
Seq. no. Signal designation Range Activity
E01 Gas test - High
E02 Wire inching - High
E03 Wire retract - High
E04 Source error reset - High
E05 Touch sensing - High
E06 Torch blow out - High
E07 Not in use - -
E08 Not in use - -
E09 Welding start - High
E10 Robot ready - High
E11 Bit 0 modes - High
E12 Bit 1 modes - High
E13 Bit 2 modes - High
E14 Master selection twin - High
E15 Not in use - -
EN
E16 Not in use - -
E17 - E23 Program number 0 - 127 -
E24 Welding simulation - High
E25 - E32 Job number 0 - 99 -
With RCU 5000i and in Job mode
E17 - E23 Job number 256 - 999 -
E24 Welding simulation - High
E25 - E32 Job number 0 - 255 -
Power command value 0 - 65535
(0 - 100 %)
E33 - E40 High byte - -
E41 - E48 Low byte - -
Arc length correction, command
value
E49 - E56 High byte - -
E57 - E64 Low byte - -
E65 - E72 Not in use - -
0 - 65535
(-30 - +30 %)
-
-
E73 - E80 Burn-back, command value 0 - 255
(-200 ms - +200
ms)
E81 - E88 Not in use - -
-
55
Page 56

Seq. no. Signal designation Range Activity
E89 - E96
Pulse or dynamic correction
Command value
*)
0 - 255
-
(-5 - +5 %)
E97 Synchro Puls disable - High
E98 SFI disable - High
E99
Pulse or dynamic correction*) dis-
- High
able
E100 Burn-back disable - High
E101 Full power range (0 - 30 m) - High
E102 Not in use - -
E103 E112
Welding speed 0 - 32767
(0 - 32767 cm/
-
min)
*)
Different parameters are specified depending on the selected process and
welding program:
Process Parameters
Pulsed Pulse correction
Standard Dynamic correction
CMT Hotstart time
Pulse correction
Hotstart pulse cycles
Boost correction
Additional input
signals ‘Rob I/O’
(from robot to
power source)
Additional ‘part
number’ input signals (from robot to power
source)
Dynamic correction
Seq. no. Signal designation Range Activity
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Not in use - -
Seq. no. Signal designation Range Activity
E113-120 Part number, character 1 ASCII 32 - 254 -
E121-128 Part number, character 2 ASCII 32 - 254 -
E129-136 Part number, character 3 ASCII 32 - 254 -
E137-144 Part number, character 4 ASCII 32 - 254 -
E145-152 Part number, character 5 ASCII 32 - 254 -
56
E153-160 Part number, character 6 ASCII 32 - 254 -
E161-168 Part number, character 7 ASCII 32 - 254 -
Page 57

Seq. no. Signal designation Range Activity
E169-176 Part number, character 8 ASCII 32 - 254 -
E177-184 Part number, character 9 ASCII 32 - 254 -
E185-192 Part number, character 10 ASCII 32 - 254 -
Output signals
(from robot to
power source)
E193-200 Part number, character 11 ASCII 32 - 254 -
EN
Seq. n0. Signal designation Range Activity
A01 - A08 Error number - High
A09 Arc stable - High
A10 Limit signal (only with RCU 5000i) - High
A11 Process active - High
A12 Main current signal - High
A13 Torch collision protection - High
A14 Power source ready - High
A15 Communication ready - High
A16 Spare - -
A17 Stick control - High
A18 Not in use - -
A19 Robot access (only with RCU 5000i) - High
A20 Wire available - High
A21 Timeout short circuit - High
A22 Data documentation ready - High
A23 Not in use - -
A24 Power outside range - High
A25 - A32 Not in use - -
Welding voltage (real value) 0 - 65535
(0 - 100 V)
A33 - A40 High byte - -
A41 - A48 Low byte - -
Welding current (real value) 0 - 65535
(0 - 1000 A)
A49 - A56 High byte - -
A57 - A64 Low byte - -
A65- A72 Not in use - -
A73- A80 Not in use - -
A81- A88 Not in use - -
-
-
A89 - A96 Motor current, real value 0 - 255
(0 - 5 A)
-
57
Page 58

Seq. n0. Signal designation Range Activity
Additional output signals ‘Rob
I/O’ (from power
source to robot)
Wire feed speed, real value 0 - 65535
(-327,68 bis
327,67 m/min)
A97 A104
A105 A112
Seq. no. Signal designation Range Activity
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Not in use - -
High byte - -
Low byte - -
-
Additional ‘part
number’ output
signals (from robot to power
source)
Seq. no. Signal designation Range Activity
A113-120 Not in use - -
A121-128 Not in use - -
A129-136 Not in use - -
A137-144 Not in use - -
A145-152 Not in use - -
A153-160 Not in use - -
A161-168 Not in use - -
A169-176 Not in use - -
A177-184 Not in use - -
A185-192 Not in use - -
A193-200 Not in use - -
58
Page 59

Input and output signals for TIG
Input signal
(from robot to
power source)
Seq. no. Signal designation Range Activity
E01 Gas test - High
E02 Wire inching - High
E03 Wire retract - High
E04 Source error reset - High
E05 Touch sensing - High
E06 Cold wire disable - High
E07 Not in use - -
E08 Not in use - -
E09 Welding start - High
E10 Robot ready - High
E11 Bit 0 modes - High
E12 Bit 1 modes - High
E13 Bit 2 modes - High
E14 Not in use - -
E15 Not in use - -
EN
E16 Not in use - -
E17 DC/AC - High
E18 DC- / DC+ - High
E19 Cap shaping - High
E20 Pulse disable - High
E21 Pulse range bit 0 - High
E22 Pulse range bit 1 - High
E23 Pulse range bit 2 - High
E24 Welding simulation - High
E25 - E32 Job number 0 - 99 -
Main current, command value 0 - 65535
(0 - max.)
E33 - E40 High byte - -
E41 - E48 Low byte - -
External parameter, command value 0 - 65535 -
E49 - E56 High byte - -
E57 - E64 Low byte - -
-
E65 - E72 Not in use - -
E73 - E80 Duty Cycle, command value 0 - 255
(10 - 90%)
E81 - E88 Not in use - -
-
59
Page 60

Seq. no. Signal designation Range Activity
Additional input
signals ‘Rob I/O’
(from robot to
power source)
E89 - E96 Base current, command value 0 - 255
(0 - 100%)
E97 Not in use - -
E98 Not in use - -
E99 Base current disable - High
E100 Duty cycle disable - High
E101 - E102 Not in use - -
E103 - E112 Wirefeed speed, command value, Fd.1
Bit 0-9
Seq. no. Signal designation Range Activity
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Not in use - -
0 - 1023
(0 - max.)
-
-
Additional ‘part
number’ input signals (from robot to power
source)
TIG pulse range
settings
Seq. no. Signal designation Range Activity
E113-120 Part number, character 1 ASCII 32 - 254 -
E121-128 Part number, character 2 ASCII 32 - 254 -
E129-136 Part number, character 3 ASCII 32 - 254 -
E137-144 Part number, character 4 ASCII 32 - 254 -
E145-152 Part number, character 5 ASCII 32 - 254 -
E153-160 Part number, character 6 ASCII 32 - 254 -
E161-168 Part number, character 7 ASCII 32 - 254 -
E169-176 Part number, character 8 ASCII 32 - 254 -
E177-184 Part number, character 9 ASCII 32 - 254 -
E185-192 Part number, character 10 ASCII 32 - 254 -
E193-200 Part number, character 11 ASCII 32 - 254 -
Range selection E31 E30 E29
Set pulse range on power source 0 0 0
60
Pulse setting range deactivated 0 0 1
0.2 - 2 Hz 0 1 0
2 - 20 Hz 0 1 1
20 - 200 Hz 1 0 0
200 - 2000 Hz 1 0 1
Page 61

Output signals
(from power
source to robot)
Seq, no. Signal designation Range Activity
A01 - A08 Error number - High
A09 Arc stable - High
A10 Not in use - -
A11 Process active - High
A12 Main current signal - High
A13 Torch collision protection - High
A14 Power source ready - High
A15 Communication ready - High
A16 Spare - -
A17 Not in use - -
A18 High frequency active - High
A19 Not in use - -
A20 Wire available (cold wire) - High
A21 Not in use - -
A22 Not in use - -
A23 Pulse high - High
A24 Not in use - -
A25 - A32 Not in use - -
EN
Welding voltage, actual value 0 - 65535
(0-100 V)
A33 - A40 High byte - -
A41 - A48 Low byte - -
Welding current, actual value 0 - 65535
(0 - 1000 A)
A49 - A56 High byte - -
A57 - A64 Low byte - -
A65 - A72 Not in use - -
A73 - A80 Arc length, actual value (AVC) 0 - 255
(0 - 50 V)
A81 - A88 Not in use - -
A89 - A96 Motor current, actual value (cold
wire)
Wirefeed speed, actual value (cold
wire)
A97 A104
High byte - -
0 - 255
(0 - 5 A)
0 - 65535
(-327,68 +327,67 m/min)
-
-
-
-
-
A105A112
Low byte - -
61
Page 62

Additional output signals ‘Rob
I/O’ (from power
source to robot)
Seq. no. Signal designation Range Activity
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Not in use - -
Additional ‘part
number’ output
signals (from robot to power
source)
Seq. no. Signal designation Range Activity
A113-120 Not in use - -
A121-128 Not in use - -
A129-136 Not in use - -
A137-144 Not in use - -
A145-152 Not in use - -
A153-160 Not in use - -
A161-168 Not in use - -
A169-176 Not in use - -
A177-184 Not in use - -
A185-192 Not in use - -
A193-200 Not in use - -
62
Page 63

Input and output signals for CC/CV
Input signals
(from robot to
power source)
Seq, no. Signal designation Range Activity
E01 Welding start - High
E02 Robot ready - High
E03 Modes bit 0 - High
E04 Modes bit 1 - High
E05 Modes bit 2 - High
E06 Master ID twin - High
E07 Not in use - -
E08 Not in use - -
E09 Gas Test - High
E10 Wire inching - High
E11 Wire retract - High
E012 Source error reset - High
E13 Touch sensing - High
E14 Torch blow out - High
E15 Not in use - -
EN
E16 Not in use - -
E17 - E24 Job number 0 - 99 -
E25 - E31 Not in use - -
E32 Welding simulation - High
Welding current (command value) 0 - 65535
(0 - max.)
E33 - E40 Low byte - -
E41 - E48 High byte - -
Wirefeed speed 0 - 65535
(0 - max.)
E49 - E56 Low byte - -
E57 - E64 High byte - -
E65 - E72 Welding voltage 0 - 255
(0 - max.)
E73 - E80 Not in use - -
E81 - E88 Low byte - -
E89 - E96 High byte - -
-
-
-
E97 - E104 Not in use - -
63
Page 64

Additional input
signals ‘Rob I/O’
(from robot to
power source)
Seq. no. Signal designation Range Activity
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Not in use - -
Additional ‘part
number’ input signals (from robot to power
source)
Output signals
(from power
source to robot)
Seq. no. Signal designation Range Activity
E113-120 Part number, character 1 ASCII 32 - 254 -
E121-128 Part number, character 2 ASCII 32 - 254 -
E129-136 Part number, character 3 ASCII 32 - 254 -
E137-144 Part number, character 4 ASCII 32 - 254 -
E145-152 Part number, character 5 ASCII 32 - 254 -
E153-160 Part number, character 6 ASCII 32 - 254 -
E161-168 Part number, character 7 ASCII 32 - 254 -
E169-176 Part number, character 8 ASCII 32 - 254 -
E177-184 Part number, character 9 ASCII 32 - 254 -
E185-192 Part number, character 10 ASCII 32 - 254 -
E193-200 Part number, character 11 ASCII 32 - 254 -
Seq. no. Signal designation Range Activity
A01 Arc stable - High
A02 Limit signal (only with RCU 5000i) - High
A03 Process active - High
A04 Main current signal - High
A05 Torch collision protection - High
A06 Power source ready - High
A07 Communication ready - High
A08 Not in use - -
A09 - A16 Error number 0 - 255 -
A17 - A24 Not in use - -
A25 Stick control - High
A26 Not in use - -
A27 Robot access (only with RCU 5000i) - High
A28 Wire available - High
A29 Timeout short circuit - High
A30 Data documentation ready (only
with RCU 5000i)
- High
64
Page 65

Seq. no. Signal designation Range Activity
A31 Not in use - -
A32 Power outside range - High
Welding voltage, actual value 0 - 65535
(0 - 100 V)
A33 - A40 Low byte - -
A41 - A48 High byte - -
Welding current, actual value 0 - 65535
(0 - 1000 A)
A49 - A56 Low byte - -
A57 - A64 High byte - -
A65 - A72 Motor current, actual value 0 - 255
(0 - 5 A)
A73 - A80 Not in use - -
Wire feed speed, actual value 0 - 65535
(-327,68 bis
327,67 m/min)
A81 - A88 Low byte - -
A89 - A96 High byte - -
A97 - A104 Not in use - -
-
EN
-
-
-
Additional output signals ‘Rob
I/O’ (from power
source to robot)
Additional ‘part
number’ output
signals (from robot to power
source)
Seq. no. Signal designation Range Activity
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Not in use - -
Seq. no. Signal designation Range Activity
A113-120 Not in use - -
A121-128 Not in use - -
A129-136 Not in use - -
A137-144 Not in use - -
A145-152 Not in use - -
A153-160 Not in use - -
A161-168 Not in use - -
A169-176 Not in use - -
A177-184 Not in use - -
65
Page 66

Seq. no. Signal designation Range Activity
A185-192 Not in use - -
A193-200 Not in use - -
66
Page 67

Input and output signals for standard manual
Eingangssignale
(vom Roboter
zur Stromquelle)
Seq. no. Signal designation Range Activity
E01 Welding start - High
E02 Robot ready - High
E03 Modes bit 0 - High
E04 Modes bit 1 - High
E05 Modes bit 2 - High
E06 Master selection twin - High
E07 Not in use - -
E08 Not in use - -
E09 Gas test - High
E10 Wire inching - High
E11 Wire retract - High
E12 Source error reset - High
E13 Touch sensing - High
E14 Torch blow out - High
E15 Not in use - -
EN
E16 Not in use - -
E17 - E24 Not in use - -
E25 - E31 Program number 0 - 127 -
E32 Welding simulation - High
Wirefeed speed 0 - 65535
(-327,68 +327,67 m/min)
E33 - E40 Low byte - -
E41 - E48 High byte - -
Welding voltage 0 - 65535
(0 - U
E49 - E56 Low byte - -
E57 - E64 High byte - -
E65- E72 Dynamic correction 0 - 255
(-5 - +5 %)
E73 - E80 Burn-back, command value 0 - 255
(-200 ms - +200
ms)
max.
)
-
-
-
-
E81 - E88 Low byte - -
E89 - E96 High byte - -
E97 Not in use - -
E98 Not in use - -
67
Page 68

Seq. no. Signal designation Range Activity
E99
Pulse or dynamic correction*) dis-
- High
able
E100 Burn-back disable - High
E101 Full power range (0 - 30 m) - High
E102 - 104 Not in use - -
*)
Different parameters are specified depending on the selected process and
welding program:
Process Parameters
Pulsed Pulse correction
Standard Dynamic correction
CMT Hotstart time
Pulse correction
Hotstart pulse cycle
Boost correction
Dynamic correction
Additional input
signals ‘Rob I/O’
(from robot to
power source)
Additional ‘part
number’ input signals (from robot to power
source)
Seq. no. Signal designation Range Activity
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Not in use - -
Seq. no. Signal designation Range Activity
E113-120 Part number, character 1 ASCII 32 - 254 -
E121-128 Part number, character 2 ASCII 32 - 254 -
E129-136 Part number, character 3 ASCII 32 - 254 -
E137-144 Part number, character 4 ASCII 32 - 254 -
E145-152 Part number, character 5 ASCII 32 - 254 -
E153-160 Part number, character 6 ASCII 32 - 254 -
E161-168 Part number, character 7 ASCII 32 - 254 -
E169-176 Part number, character 8 ASCII 32 - 254 -
E177-184 Part number, character 9 ASCII 32 - 254 -
68
E185-192 Part number, character 10 ASCII 32 - 254 -
E193-200 Part number, character 11 ASCII 32 - 254 -
Page 69

Output signals
(from power
source to robot)
Seq. no. Signal designation Range Activity
A01 Arc stable - High
A02 Limit signal (only with RCU 5000i) - High
A03 Process active - High
A04 Main current signal - High
A05 Torch collision protection - High
A06 Power source ready - High
A07 Communication ready - High
A08 Not in use - -
A09 - A16 Error number 0 - 255 -
A17 - A24 Not in use - -
A25 Stick control - High
A26 Not in use - -
A27 Robot access (only with RCU 5000i) - High
A28 Wire available - High
A29 Timeout short circuit - High
A30 Data documentation ready - High
A31 Not in use - -
A32 Power outside range - High
EN
Welding voltage, actual value 0 - 65535
(0 - 100 V)
A33 - A40 Low byte - -
A41 - A48 High byte - -
Welding current, actual value 0 - 65535
(0 - 1000 A)
A49 - A56 Low byte - -
A57 - A64 High byte - -
A65 - A72 Motor current, actual value 0 - 255
(0 - 5 A)
A73 - A80 Not in use - -
Wire feed speed 0 - 65535
(-327,68 bis
327,67 m/min)
A81 - A88 Low byte - -
A89 - A96 High byte - -
A97 - A104 Not in use - -
-
-
-
-
Additional output signals ‘Rob
I/O’ (from power
source to robot)
Seq. no. Signal designation Range Activity
A105 ROB I/O Input 1 - High
69
Page 70

Seq. no. Signal designation Range Activity
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Not in use - -
Additional ‘part
number’ output
signals (from robot to power
source)
Seq. no. Signal designation Range Activity
A113-120 Not in use - -
A121-128 Not in use - -
A129-136 Not in use - -
A137-144 Not in use - -
A145-152 Not in use - -
A153-160 Not in use - -
A161-168 Not in use - -
A169-176 Not in use - -
A177-184 Not in use - -
A185-192 Not in use - -
A193-200 Not in use - -
70
Page 71

Technical data
AB Profibus DP
Power supply 24 V DC, +/- 10%
Current input 400 mA (typical)
Position on the rear of the power
sources:
Protection IP23
Configuration interface via field bus configuration module
TPS 3200 / 4000 / 5000
TS 4000 / 5000
EN
71
Page 72

Circuit diagram AB Profibus DP
72
Page 73

Remote bus installation circuit diagram - Profibus
DP
EN
73
Page 74

74
Page 75

Sommaire
Généralités 77
Sécurité 77
Principes fondamentaux 77
Conception de l’appareil 77
Raccordements avec l’interface 78
Consignes supplémentaires 78
Exemple d’utilisation 78
Raccorder et configurer AB Profibus DP 79
Généralités 79
Sécurité 79
Raccords, possibilités de réglage et affichages sur le module de bus Profibus Anybus-S 79
Aperçu 80
Raccorder AB Profibus DP 81
Raccorder l’interface AB Profibus DP 81
Schéma de connexion du connecteur 9 pôles Profibus DP 81
Configurer AB Profibus DP 82
Régler la vitesse de transmission de données (taux de bauds) 82
Régler l’interrupteur de fin de course 82
Régler le sélecteur d’adresse 82
Fichier de base de l’appareil (GSD) 83
Généralités 83
Fichier de base de l’appareil (GSD) HMS_1003 83
Diagnostic d’erreur, élimination de l'erreur 86
Voyants DEL d’état de service sur circuit imprimé UBST 1 86
DEL „+5 V“ (1) 86
DEL „Traffic 1 - 4“ (2) 86
DEL „L1 - L7“ (3) 87
DEL „EXT“ (4) 87
Cavalier „EXT“ (5) / Cavalier „INT“ (6) 88
DEL „INT“ (7) 88
DEL „VCC“ (8) 88
Voyants DEL sur le module de bus Profibus Anybus-S 88
Propriétés de la transmission de données 89
Propriétés de la transmission de données 89
Dispositif de sécurité 89
Description des signaux AB Profibus DP 90
Généralités 90
Modes de service de la source de courant 90
Aperçu 90
Signaux d'entrée et de sortie pour soudage MIG/MAG Synergic standard/Synergic pulsé et
CMT
Signaux d’entrée (du robot vers la source de courant) 91
Signaux d’entrée supplémentaire ‘Rob I/O’(du robot vers la source de courant) 92
Signaux d’entrée supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Signaux de sortie (de la source de courant vers le robot) 93
Signaux de sortie supplémentaire ‘Rob I/O’ (de la source de courant vers le robot) 94
Signaux de sortie supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Signaux d'entrée et de sortie pour TIG 95
Signaux d’entrée (du robot vers la source de courant) 95
Signaux d’entrée supplémentaire ‘Rob I/O’(du robot vers la source de courant) 96
Signaux d’entrée supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Réglage de la plage d'impulsion TIG 96
Signaux de sortie (de la source de courant vers le robot) 97
Signaux de sortie supplémentaire ‘Rob I/O’ (de la source de courant vers le robot) 98
Signaux de sortie supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Signaux d'entrée et de sortie pour CC/CV 99
FR
91
92
94
96
98
75
Page 76

Signaux d’entrée (du robot vers la source de courant) 99
Signaux d’entrée supplémentaire ‘Rob I/O’(du robot vers la source de courant) 100
Signaux d’entrée supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Signaux de sortie (de la source de courant vers le robot) 100
Signaux de sortie supplémentaire ‘Rob I/O’ (de la source de courant vers le robot) 101
Signaux de sortie supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Signaux d'entrée et de sortie pour standard manuel 103
Signaux d’entrée (du robot vers la source de courant) 103
Signaux d’entrée supplémentaire ‘Rob I/O’(du robot vers la source de courant) 104
Signaux d’entrée supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Signaux de sortie (de la source de courant vers le robot) 105
Signaux de sortie supplémentaire ‘Rob I/O’ (de la source de courant vers le robot) 106
Signaux de sortie supplémentaires „Numéro de composant“ (du robot vers la source de
courant)
Caractéristiques techniques 107
AB Profibus DP 107
Schéma des connexions AB Profibus DP 108
Schéma des connexions du bus à distance d’installation – Profibus DP 109
100
101
104
106
76
Page 77

Généralités
Sécurité
Principes fondamentaux
AVERTISSEMENT!
Danger dû à une erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document
▶
doivent uniquement être exécutés par du personnel techniquement qualifié.
Ce document doit être lu et compris dans son intégralité.
▶
Lire et comprendre toutes les consignes de sécurité et la documentation uti-
▶
lisateur de cet appareil et de tous les composants périphériques.
Profibus
Profibus est une norme de bus de terrain ouverte, indépendante de tout fabricant, pour de multiples applications dans l’automatisation de la fabrication, des
processus et de la construction. Profibus convient aussi bien pour des transmissions de données rapides et importantes en termes de temps, que pour des
tâches de communication étendues et complexes.
Profibus DP
Profibus DP (périphérie décentralisée) est une variante de Profibus pour un
échange rapide de données de processus.
Module de bus Profibus Anybus-S
Le module de bus Profibus Anybus-S est un esclave complet de Profibus DP. Il
contient tous les composants analogiques et numériques d’une connexion Profibus performante. Un microprocesseur intégré régule automatiquement l’ensemble du trafic de bus.
FR
Conception de
l’appareil
L’interface AB Profibus DP contient un circuit imprimé UBST 1, sur lequel est installé un module de bus Profibus Anybus-S. Toutes les informations concernant
la connexion du Profibus sont enregistrées dans la CFM du circuit imprimé UBST
1.
77
Page 78

Raccordements
(2)
(1)
(3) (4)
(1) (2)
(3)
(4)
(5)
(6) (7)
(8)
(9)
(10)
avec l’interface
Raccordements avec l’interface
(1) Anti-traction
pour le passage du câble de
données Interbus et de l’alimentation électrique
(2) Connecteur LocalNet
pour le branchement du faisceau de câbles intermédiaire
(3) Connecteur LocalNet
pour le branchement d’autres
composants du système.
(4) Connecteur LocalNet
pour le branchement d’autres
composants du système.
Consignes supplémentaires
Exemple d’utilisation
REMARQUE!
Aussi longtemps que l’interface robot est connectée au LocalNet, le mode de
service „Mode 2 temps“ reste automatiquement sélectionné (affichage : Mode
de service à 2 temps).
Vous trouverez des informations plus détaillées concernant le mode de soudage
„Mode 2 temps spécial pour interface robot“ dans les chapitres „Soudage Mig/
MAG“ et „Paramètres Mode de service“ du mode d’emploi de la source de courant.
78
(1) Source de courant (6) Commande robot
(2) Refroidisseur (7) Fût de fil de soudage
(3) AB Profbus DP (8) Robot
(4) Faisceau de liaison (9) Torche de soudage
(5) Câble de données Profibus (10) Dévidoir
Page 79

Raccorder et configurer AB Profibus DP
(1)
(2)
(3)
(4)
(5)
(6)
Généralités Le raccordement et la configuration de l’interface AB Profibus DP s’effectuent
sur le module de bus Profibus Anybus-S.
Sécurité
AVERTISSEMENT!
Danger dû à une erreur de manipulation et d'erreur en cours d'opération.
Cela peut entraîner des dommages corporels et matériels graves.
Toutes les fonctions et tous les travaux décrits dans le présent document
▶
doivent uniquement être exécutés par du personnel techniquement qualifié.
Ce document doit être lu et compris dans son intégralité.
▶
Lire et comprendre toutes les consignes de sécurité et la documentation uti-
▶
lisateur de cet appareil et de tous les composants périphériques.
AVERTISSEMENT!
Risque d'électrocution.
Cela peut entraîner des dommages corporels et matériels graves.
Avant d'entamer les travaux, déconnecter tous les appareils et composants
▶
concernés et les débrancher du réseau électrique.
S'assurer que tous les appareils et composants concernés ne peuvent pas
▶
être remis en marche.
Après ouverture de l'appareil, s'assurer, à l'aide d'un appareil de mesure ap-
▶
proprié, que les composants à charge électrique (condensateurs, par ex.)
sont déchargés.
FR
Raccords, possibilités de réglage
et affichages sur
le module de bus
Profibus Anybus-S
(1) Interface vers circuit imprimé
UBST 1
(2) Connecteur Profibus DP (5) Sélecteur d’adresse unités
(3) Interrupteur de fin de course (6) Voyant DEL
(4) Sélecteur d’adresse décimales
79
Page 80

Aperçu „Raccorder et configurer AB Profibus DP“ se compose des sections suivantes :
Raccorder AB Profibus DP
-
Configurer AB Profibus DP
-
80
Page 81

Raccorder AB Profibus DP
(1)
(3)
(2)
Raccorder l’interface AB Profibus DP
Schéma de connexion du connecteur 9 pôles
Profibus DP
Raccorder la prise LocalNet du
1
faisceau de câbles intermédiaire au
connecteur LocalNet (1)
Démonter le couvercle de l’inter-
2
face (2)
Retirer l’une des 5 fausses prises
3
Faire passer le câble de données
4
Profibus à travers l’ouverture
Raccorder le câble de données
5
Profibus conformément au schéma
de connexion du connecteur 9
pôles Profibus DP du module de
bus Profibus Anybus-S
Broche 1 non utilisée
Broche 2 non utilisée
Broche 3 + RxD/TxD, selon spécification RS 485
Broche 4
Broche 5
Broche 6
1)
RTS
GND Bus
+5 V Bus
2)
2)
FR
Broche 7 non utilisée
Broche 8 - RxD/TxD, selon spécification RS 485
Broche 9 non utilisée
Boîtier Plaque, mise à la terre (PE)
1)
le sens de transmission des données peut être déterminé par RTS (request to send)
2)
+5 V BUS et GND BUS sont utilisés pour l’extrémité du bus et l’alimentation électrique externe des différents composants.
81
Page 82

Configurer AB Profibus DP
Régler la vitesse
de transmission
de données (taux
de bauds)
Régler l’interrupteur de fin de
course
Dans un réseau Profibus DP, la vitesse de transmission des données est réglée
avec la configuration du maître Profibus DP. Dans une installation Profibus DP,
une seule vitesse de transmission des données est possible.
Le module de bus Profibus Anybus-S est équipé d’une fonction automatique de
détection de la vitesse de transmission des données. L’utilisateur ne doit pas
régler la vitesse de transmission des données sur le module de bus Profibus Anybus-S.
Afin d’éviter les influences sur la transmission des données, les participants finaux doivent être définis dans un réseau Profibus DP. La définition des participants finaux s’effectue sur le module de bus Profibus Anybus-S par le biais de
l’interrupteur de fin de course :
Régler l’interrupteur de fin de course sur „ON“ si le module de bus Profibus Anybus-S est le premier ou le dernier participant dans un réseau Profibus DP.
Régler l’interrupteur de fin de course sur „OFF“ si :
le module de bus Profibus Anybus-S n’est pas le premier ou le dernier parti-
a)
cipant dans un réseau Profibus DP,
un interrupteur de fin de course externe est utilisé pour la définition des par-
b)
ticipants finaux.
Régler le sélecteur d’adresse
Régler l’adresse des participants avant la configuration du module de bus Profibus Anybus-S. Le réglage de l’adresse des participants s’effectue au format décimal de 1 à 99 sur les deux sélecteurs d’adresse :
régler les décimales sur le sélecteur d’adresse de gauche
-
régler les unités sur le sélecteur d’adresse de droite
-
Adresse = (réglage du sélecteur de gauche x 10) + (réglage du sélecteur de droite
x 1)
IMPORTANT! Une adresse de participant réglée ne peut être modifiée en cours
de fonctionnement.
82
Page 83

Fichier de base de l’appareil (GSD)
Généralités Un fichier de base de l’appareil est attribué à chaque participant dans un réseau
Profibus DP. Le fichier de base de l’appareil contient toutes les informations concernant les participants. Le fichier de base de l’appareil est nécessaire pour la
configuration du réseau et est disponible sur le site de téléchargement de
l’adresse Internet suivante :
Fichier de base
de l’appareil
(GSD)
HMS_1003
http://www.hms-networks.de/products/abs_profibus.shtml (Configuration file)
Profibus Device Database of HMS Industrial Networks.
Model : ANYBUS-S PDP
Description : ANYBUS-S Profibus DP slave
Language : English
Date : 12 March 2004
Author : HMS Industrial Networks AB
Profibus_DP
GSD_Revision = 2
Device identification
Vendor_Name = "HMS Industrial Networks AB"
Model_Name = "ANYBUS-S PDP"
Revision = "Version 1.5"
Ident_Number = 0x1003
FR
Protocol_Ident = 0; DP protocol
Station_Type = 0; Slave device
FMS_supp = 0; FMS not supported
Hardware_Release = "Version 1.6"
Software_Release = "Version 1.2"
Supported baudrates
9.6_supp = 1
19.2_supp = 1
45.45_supp = 1
93.75_supp = 1
187.5_supp = 1
500_supp = 1
1.5M_supp = 1
3M_supp = 1
6M_supp = 1
12M_supp = 1
83
Page 84

Maximum responder time for supported baudrates
MaxTsdr_9.6 = 15
MaxTsdr_19.2 = 15
MaxTsdr_45.45 = 15
MaxTsdr_93.75 = 15
MaxTsdr_187.5 = 15
MaxTsdr_500 = 15
MaxTsdr_1.5M = 25
MaxTsdr_3M = 50
MaxTsdr_6M = 100
MaxTsdr_12M = 200
Supported hardware features
Redundancy = 0; not supported
Repeater_Ctrl_Sig = 2; TTL
24V_Pins = 0; not connected
Implementation_Type = "SPC3"
Supported DP features
Freeze_Mode_supp = 1; supported
Sync_Mode_supp = 1; supported
Auto_Baud_supp = 1; supported
Set_Slave_Add_supp = 0; not supported
Maximum polling frequency
Min_Slave_Intervall = 1; 100 us
Maximum supported sizes
Modular_Station = 1; modular
Max_Module = 24
Max_Input_Len = 244
Max_Output_Len = 244
Max_Data_Len = 416
Modul_Offset = 1
Fail_Safe = 0; Slave does not accept data frames with zero
data length in state CLEAR.
84
Slave_Family = 0
Max_Diag_Data_Len = 6
Definition of modules
Module = IN/OUT (EndModule)
1 Byte 0x30
Page 85

2 Byte ( 1 word) 0x70
4 Byte ( 2 word) 0x71
8 Byte ( 4 word) 0x73
16 Byte ( 8 word) 0x77
32 Byte (16 word) 0x7F
64 Byte (32 word) 0xC0,0x5F,0x5F
128 Byte (64 word) 0xC0,0x7F,0x7F
Module = INPUT (EndModule)
1 Byte 0x10
2 Byte ( 1 word) 0x50
4 Byte ( 2 word) 0x51
8 Byte ( 4 word) 0x53
16 Byte ( 8 word) 0x57
32 Byte (16 word) 0x5F
64 Byte (32 word) 0x40,0x5F
128 Byte (64 word) 0x40,,0x7F
Module = OUTPUT (EndModule)
1 Byte 0x20
2 Byte ( 1 word) 0x60
4 Byte ( 2 word) 0x61
8 Byte ( 4 word) 0x63
16 Byte ( 8 word) 0x67
32 Byte (16 word) 0x6F
FR
64 Byte (32 word) 0x80,0x5F
128 Byte (64 word) 0x80,,0x7F
85
Page 86

Diagnostic d’erreur, élimination de l'erreur
(2)
(3)
(1)
(8)
(4)
(7)
(5)
(6)
Voyants DEL
d’état de service
sur circuit imprimé UBST 1
(1) DEL „+5 V“
(2) DEL „Traffic 1 - 4“
(3) DEL „L1 - L7“
(4) DEL „EXT“
DEL „+5 V“ (1) La DEL „+5 V“ (1) s’allume lorsque la tension d’alimentation interne ou externe
DEL „Traffic 1 4“ (2)
est raccordée. La DEL „+5 V“ indique que le système électronique du circuit imprimé fonctionne correctement.
DEL Affichage Signification Remède
Traffic X Éteint ou al-
lumé
Traffic X Clignote Communication sur Lo-
Pas de communication
sur le LocalNet Fronius
calNet Fronius active
(5) Cavalier „EXT“
(6) Cavalier „INT“
(7) DEL „INT“
(8) DEL „VCC“
Vérifier la tension d’alimentation;
Contrôler le câblage
-
86
Page 87

DEL „L1 - L7“ (3)
(a) (b) (c)
DEL Affichage Signification Remède
L1 Éteint / Cli-
gnote
Erreur produite dans le
module
Voir numéro d’erreur selon
tableau / service aprèsvente
L2 Allumé Communication sur Local-
-
Net Fronius active
L3 Clignote Ethernet-Stack envoie des
-
données
L6 Allumé Ethernet - Connexion phy-
-
sique établie
L7 Cignote Transmission de données
-
Ethernet active
DEL „L1“ allumée :
La description des erreurs et les affichages correspondants à l’écran au niveau de
la source de courant sont décrits dans la notice „Interface robot“
(42,0410,0616) :
chapitre „Signaux de sortie vers le robot“, section „Numéro d’erreur UBST“
La DEL „L1“ clignote - L’erreur est signalée par le code de clignotement :
(a) Clignotement rapide :
Démarrage du code d’erreur
FR
(b) Première impulsion lente :
Type d’erreur
(c) Deuxième impulsion lente :
Localisation de l’erreur
Code
d’erreur
Explication
de l’erreur Description de l’erreur Remède
1 1 Taille de cadre Ethernet max.
dépassée
2 Type Mailbox incorrect -
4 Flux de données UDP trop faible
sur le port 15000
5 Flux de données UDP excessif -
6 Flux de données UDP trop faible
sur le port 15001
7 Port UDP incorrect -
8 Erreur lors de l’initialisation Stack -
9 Appel de fonction non valide -
Déconnecter et
reconnecter l’interface
-
-
DEL „EXT“ (4) La DEL „EXT“ (4) s’allume si la tension d’alimentation externe est sélectionnée à
l’aide du cavalier „EXT“ (5).
87
Page 88

Cavalier „EXT“
(1)
(4)
(2)
(3)
(5) / Cavalier
„INT“ (6)
Le cavalier „EXT“ (5) et le cavalier „INT“ (6) servent à choisir entre la tension
d’alimentation interne et externe. Lors de la livraison, le cavalier se trouve sur
„Tension d’alimentation externe“.
DEL „INT“ (7) La DEL „INT“ (7) s’allume si la tension d’alimentation interne est sélectionnée à
l’aide du cavalier „INT“ (6).
DEL „VCC“ (8) La DEL „VCC“ (8) s’allume lorsque la tension d’alimentation interne ou externe
est raccordée. La DEL „VCC“ indique que la tension d’alimentation + 24 V pour
les composants est correcte dans le sens externe du côté LocalNet.
Voyants DEL sur
le module de bus
Profibus Anybus-S
DEL Voyant Signification
(1) - non utilisé
(2) s’allume en vert Le module est raccordé au bus de terrain, l’échange
de données est possible
ne s’allume pas Le module n’est pas raccordé au bus de terrain
(3) s’allume en rouge Le module n’est pas raccordé au bus de terrain, au-
cun échange de données n’est possible
(4) clignote en rouge,
ne s’allume pas Le module est raccordé au bus de terrain
Erreur de configuration :
1 Hz
la longueur réglée lors de l’initialisation du module
pour IN et / ou OUT ne correspond pas à la
longueur réglée lors de la configuration du réseau
clignote en rouge,
2 Hz
Erreur de données utilisateur :
la longueur réglée lors de l’initialisation du module
ou le contenu des données utilisateur ne correspond pas à la longueur ou au contenu réglé(e) lors
de la configuration du réseau
clignote en rouge,
4 Hz
Erreur lors de l’initialisation de l’ASIC pour la communication Profibus
ne s’allume pas Pas d’erreur
88
Page 89

Propriétés de la transmission de données
Propriétés de la
transmission de
données
Dispositif de
sécurité
Technique de transmission EIA RS 485
Topologie du réseau Bus linéaire, connexion bus active aux deux
extrémités, câbles de dérivation possibles
Medium Câble blindé torsadé Twisted Pair avec blindage
Débit de transmission 9,6 kBaud - 12 MBaud
Connexion bus Connecteur 9 broches D-Sub
Bande passante de données
de processus
Format de données de processus
En cas d’absence de transmission de données, toutes les entrées et sorties sont
remises à zéro et la source de courant se trouve à l’état „Stop“. Après la reprise
de la transmission de données a lieu la reprise du processus par les signaux suivants :
Signal “Robot ready”
-
Signal „confirmer défaut sources“
-
112 Bit (configuration standard)
Motorola
FR
89
Page 90

Description des signaux AB Profibus DP
Généralités En fonction du mode de service sélectionné, l’interface AB Profibus DP peut
transmettre des signaux d’entrée et de sortie très différents.
Modes de service
de la source de
courant
Aperçu Le chapitre „Description des signaux AB Profibus DP“ se compose des sections
Mode de service E13 E12 E11
Soudage MIG/MAG Synergic standard 0 0 0
Soudage MIG/MAG Synergic pulsé 0 0 1
Mode Job 0 1 0
Sélection de paramètres internes 0 1 1
Soudage MIG/MAG manuel standard 1 0 0
CC/CV 1 0 1
Soudage TIG 1 1 0
CMT / Procédé spécial 1 1 1
suivantes :
Signaux d’entrée et de sortie pour soudage MIG/MAG Synergic standard/
-
Synergic pulsé et CMT
Signaux d’entrée et de sortie pour TIG
-
Signaux d’entrée et de sortie pour CC/CV
-
Signaux d’entrée et de sortie pour standard manuel
-
90
Page 91

Signaux d'entrée et de sortie pour soudage
MIG/MAG Synergic standard/Synergic pulsé et
CMT
Signaux d’entrée
(du robot vers la
source de courant)
N° d’ordre Description du signal Plage Activité
E01 Gas Test - High
E02 Amenée de fil - High
E03 Retour de fil - High
E04 Valider la panne de source - High
E05 Recherche de position - High
E06 Soufflage torche - High
E07 Non utilisé - -
E08 Non utilisé - -
E09 Soudage activé - High
E10 Robot prêt - High
E11 Modes de service Bit 0 - High
E12 Modes de service Bit 1 - High
E13 Modes de service Bit 2 - High
E14 Identification du maître Twin - High
E15 Non utilisé - -
FR
E16 Non utilisé - -
E17 - E23 Numéro de programme 0 - 127 -
E24 Simulation du soudage - High
E25 - E32 Numéro de job 0 - 99 -
Avec RCU 5000i et en mode de service Mode Job
E17 - E23 Numéro de job 256 - 999 -
E24 Simulation du soudage - High
E25 - E32 Numéro de job 0 - 255 -
Puissance (valeur de consigne) 0 - 65535
(0 - 100 %)
E33 - E40 High Byte - -
E41 - E48 Low Byte - -
Correction de longueur de l'arc
électrique (valeur de consigne)
E49 - E56 High Byte - -
E57 - E64 Low Byte - -
E65 - E72 Non utilisé - -
0 - 65535
(-30 - +30 %)
-
-
91
Page 92

N° d’ordre Description du signal Plage Activité
E73 - E80 Brûlure retour (valeur de consi-
gne)
0 - 255
(-200 ms - +200
-
ms)
E81 - E88 Non utilisé - -
E89 - E96 Correction arc pulsé ou dynami-
que*) (valeur de consigne)
0 - 255
(-5 - +5 %)
-
E97 Synchro Puls disable - High
E98 SFI disable - High
E99 Correction arc pulsé ou dynami-
- High
que*) disable
E100 Brûlure retour disable - High
E101 Pleine puissance (0 - 30 m) - High
E102 Non utilisé - -
E103 E112
Vitesse de soudage 0 - 32767
(0 - 32767 cm/
-
min)
*)
En fonction du procédé sélectionné et du programme de soudage réglé,
différents paramètres sont indiqués :
Signaux d’entrée
supplémentaire ‘Rob I/
O’(du robot vers
la source de courant)
Procédé Paramètres
Impulsion Correction de l’impulsion
Standard Correction arc dynamique
CMT Hotstart-time
Correction de l’impulsion
Cycles d’impulsions Hotstart
Correction Boost
Correction arc dynamique
N° d’ordre Description du signal Plage Activité
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Non utilisé - -
Signaux d’entrée
supplémentaires
„Numéro de
composant“ (du
robot vers la
source de courant)
92
N° d’ordre Description du signal Plage Activité
E113-120 N° de composant, Caractère 1 ASCII 32 - 254 -
E121-128 N° de composant, Caractère 2 ASCII 32 - 254 -
E129-136 N° de composant, Caractère 3 ASCII 32 - 254 -
E137-144 N° de composant, Caractère 4 ASCII 32 - 254 -
Page 93

N° d’ordre Description du signal Plage Activité
E145-152 N° de composant, Caractère 5 ASCII 32 - 254 -
E153-160 N° de composant, Caractère 6 ASCII 32 - 254 -
E161-168 N° de composant, Caractère 7 ASCII 32 - 254 -
E169-176 N° de composant, Caractère 8 ASCII 32 - 254 -
E177-184 N° de composant, Caractère 9 ASCII 32 - 254 -
E185-192 N° de composant, Caractère 10 ASCII 32 - 254 -
E193-200 N° de composant, Caractère 11 ASCII 32 - 254 -
FR
Signaux de sortie (de la source
de courant vers
le robot)
N° d’ordre Description du signal Plage Activité
A01 - A08 Numéro d’erreur - High
A09 Arc électrique stable - High
A10 Signal limite (uniquement en relati-
on avec RCU 5000i)
A11 Processus actif - High
A12 Signal Courant principal - High
A13 Protection collision torche - High
A14 Source de courant prête - High
A15 Communication prête - High
A16 Réserve - -
A17 Contrôle collage - High
A18 Non utilisé - -
A19 Accès robot (uniquement en relation
avec RCU 5000i)
A20 Fil disponible - High
A21 Durée dépassée court-circuit - High
- High
- High
A22 Données documentation prêtes (uni-
quement avec RCU 5000i)
A23 Non utilisé - -
A24 Puissance hors plage - High
A25 - A32 Non utilisé - -
Tension de soudage (valeur réelle) 0 - 65535
A33 - A40 High Byte - -
A41 - A48 Low Byte - -
Courant de soudage (valeur réelle) 0 - 65535
A49 - A56 High Byte - -
A57 - A64 Low Byte - -
A65 - A72 Non utilisé - -
- High
-
(0 - 100 V)
-
(0 - 1000 A)
93
Page 94

N° d’ordre Description du signal Plage Activité
A73 - A80 Non utilisé - -
A81- A88 Non utilisé - -
Signaux de sortie supplémentaire ‘Rob I/O’
(de la source de
courant vers le
robot)
A89- A96 Courant moteur (valeur réelle) 0 - 255 (0 - 5
A)
Vitesse d’avance du fil (valeur réelle) 0 - 65535
(-327,68 +327,67 m/
min)
A97 - 104 High Byte - -
A105 - 112 Low Byte - -
N° d’ordre Description du signal Plage Activité
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Non utilisé - -
-
-
Signaux de sortie supplémentaires „Numéro
de composant“
(du robot vers la
source de courant)
N° d’ordre Description du signal Plage Activité
A113-120 Non utilisé - -
A121-128 Non utilisé - -
A129-136 Non utilisé - -
A137-144 Non utilisé - -
A145-152 Non utilisé - -
A153-160 Non utilisé - -
A161-168 Non utilisé - -
A169-176 Non utilisé - -
A177-184 Non utilisé - -
A185-192 Non utilisé - -
A193-200 Non utilisé - -
94
Page 95

Signaux d'entrée et de sortie pour TIG
Signaux d’entrée
(du robot vers la
source de courant)
N° d’ordre Description du signal Plage Activité
E01 Gas Test - High
E02 Amenée de fil - High
E03 Retour de fil - High
E04 Valider la panne de source - High
E05 Recherche de position - High
E06 KD disable - High
E07 Non utilisé - -
E08 Non utilisé - -
E09 Soudage activé - High
E10 Robot prêt - High
E11 Modes de service Bit 0 - High
E12 Modes de service Bit 1 - High
E13 Modes de service Bit 2 - High
E14 Non utilisé - -
E15 Non utilisé - -
FR
E16 Non utilisé - -
E17 DC / AC - High
E18 DC- / DC+ - High
E19 Formation de calotte - High
E20 Impulsions disable - High
E21 Sélection plage d’impulsion Bit 0 - High
E22 Sélection plage d’impulsion Bit 1 - High
E23 Sélection plage d’impulsion Bit 2 - High
E24 Simulation du soudage - High
E25 - E32 Numéro de job 0 - 99 -
Courant principal, valeur de consigne 0 - 65535
(0 bis max.)
E33 - E40 High Byte - -
E41 - E48 Low Byte - -
Paramètre externe, valeur de consigne 0 - 65535 -
E49 - E56 High Byte - -
E57 - E64 Low Byte - -
-
E65 - E72 Non utilisé - -
E73 - E80 Duty Cycle, valeur de consigne 0 - 255
(10 - 90%)
E81 - E88 Non utilisé - -
-
95
Page 96

N° d’ordre Description du signal Plage Activité
Signaux d’entrée
supplémentaire ‘Rob I/
O’(du robot vers
la source de courant)
E89 - E96 Courant de base, valeur de consigne 0 - 255
-
(0 - 100%)
E97 Non utilisé - -
E98 Non utilisé - -
E99 Courant de base disable - High
E100 Duty Cycle disable - High
E101 - E102 Non utilisé - -
E103 - E112 Vitesse d’avance du fil, valeur de con-
signe, Fd.1, Bit 0-9
0 - 1023
(0 - vD
max
-
)
N° d’ordre Description du signal Plage Activité
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Non utilisé - -
Signaux d’entrée
supplémentaires
„Numéro de
composant“ (du
robot vers la
source de courant)
Réglage de la
plage d'impulsion TIG
N° d’ordre Description du signal Plage Activité
E113-120 N° de composant, Caractère 1 ASCII 32 - 254 -
E121-128 N° de composant, Caractère 2 ASCII 32 - 254 -
E129-136 N° de composant, Caractère 3 ASCII 32 - 254 -
E137-144 N° de composant, Caractère 4 ASCII 32 - 254 -
E145-152 N° de composant, Caractère 5 ASCII 32 - 254 -
E153-160 N° de composant, Caractère 6 ASCII 32 - 254 -
E161-168 N° de composant, Caractère 7 ASCII 32 - 254 -
E169-176 N° de composant, Caractère 8 ASCII 32 - 254 -
E177-184 N° de composant, Caractère 9 ASCII 32 - 254 -
E185-192 N° de composant, Caractère 10 ASCII 32 - 254 -
E193-200 N° de composant, Caractère 11 ASCII 32 - 254 -
Sélection de la plage E31 E30 E29
Régler la plage d'impulsion au ni-
0 0 0
veau de la source de courant
96
Plage de réglage impulsion désac-
0 0 1
tivée
0,2 - 2 Hz 0 1 0
2 - 20 Hz 0 1 1
Page 97

Sélection de la plage E31 E30 E29
20 - 200 Hz 1 0 0
200 - 2000 Hz 1 0 1
Signaux de sortie (de la source
de courant vers
le robot)
N° d’ordre Description du signal Plage Activité
A01 - A08 Numéro d’erreur - High
A09 Arc électrique stable - High
A10 Non utilisé - -
A11 Processus actif - High
A12 Signal Courant principal - High
A13 Protection collision torche - High
A14 Source de courant prête - High
A15 Communication prête - High
A16 Réserve - -
A17 Non utilisé - -
A18 Haute fréquence active - High
A19 Non utilisé - -
A20 Fil disponible (fil froid) - High
A21 Non utilisé - -
A22 Non utilisé - -
FR
A23 Puls High - High
A24 Non utilisé - -
A25 - A32 Non utilisé - -
Tension de soudage, valeur réelle 0 - 65535
(0-100 V)
A33 - A40 High Byte - -
A41 - A48 Low Byte - -
Courant de soudage, valeur réelle 0 - 65535
(0 - 1000 A)
A49 - A56 High Byte - -
A57 - A64 Low Byte - -
A65 - A72 Non utilisé - -
A73 - A80 Longueur de l’arc électrique, valeur
réelle (AVC)
A81 - A88 Non utilisé - -
A89 - A96 Courant moteur, valeur réelle (fil
froid)
Vitesse d’avance du fil, valeur réelle
(fil froid))
0 - 255
(0 - 50 V)
0 - 255
(0 - 5 A)
0 - 65535
(-327,68 +327,67 m/min)
-
-
-
-
-
97
Page 98

N° d’ordre Description du signal Plage Activité
Signaux de sortie supplémentaire ‘Rob I/O’
(de la source de
courant vers le
robot)
Signaux de sortie supplémentaires „Numéro
de composant“
(du robot vers la
source de courant)
A97 A104
A105A112
N° d’ordre Description du signal Plage Activité
A105 ROB I/O Input 1 - High
A106 ROB I/O Input 2 - High
A107 ROB I/O Input 3 - High
A108 ROB I/O Input 4 - High
A109 - A112 Non utilisé - -
N° d’ordre Description du signal Plage Activité
A113-120 Non utilisé - -
A121-128 Non utilisé - -
A129-136 Non utilisé - -
A137-144 Non utilisé - -
High Byte - -
Low Byte - -
A145-152 Non utilisé - -
A153-160 Non utilisé - -
A161-168 Non utilisé - -
A169-176 Non utilisé - -
A177-184 Non utilisé - -
A185-192 Non utilisé - -
A193-200 Non utilisé - -
98
Page 99

Signaux d'entrée et de sortie pour CC/CV
Signaux d’entrée
(du robot vers la
source de courant)
N° d’ordre Description du signal Plage Activité
E01 Soudage activé - High
E02 Robot prêt - High
E03 Modes de service Bit 0 - High
E04 Modes de service Bit 1 - High
E05 Modes de service Bit 2 - High
E06 Identification du maître Twin - High
E07 Non utilisé - -
E08 Non utilisé - -
E09 Gas Test - High
E10 Amenée de fil - High
E11 Retour de fil - High
E012 Valider la panne de source - High
E13 Recherche de position - High
E14 Soufflage torche - High
E15 Non utilisé - -
FR
E16 Non utilisé - -
E17 - E24 Numéro de job 0 - 99 -
E25 - E31 Non utilisé - -
E32 Simulation du soudage - High
Courant de soudage (valeur de consi-
gne)
E33 - E40 Low Byte - -
E41 - E48 High Byte - -
Vitesse du fil 0 - 65535
E49 - E56 Low Byte - -
E57 - E64 High Byte - -
E65 - E72 Tension de soudage 0 - 255
E73 - E80 Non utilisé - -
E81 - E88 Low Byte - -
E89 - E96 High Byte - -
0 - 65535
(0 - max.)
(0 - max.)
(0 - max.)
-
-
-
E97 - E104 Non utilisé - -
99
Page 100

Signaux d’entrée
supplémentaire ‘Rob I/
O’(du robot vers
la source de courant)
N° d’ordre Description du signal Plage Activité
E105 ROB I/O Output 1 - High
E106 ROB I/O Output 2 - High
E107 - E112 Non utilisé - -
Signaux d’entrée
supplémentaires
„Numéro de
composant“ (du
robot vers la
source de courant)
Signaux de sortie (de la source
de courant vers
le robot)
N° d’ordre Description du signal Plage Activité
E113-120 N° de composant, Caractère 1 ASCII 32 - 254 -
E121-128 N° de composant, Caractère 2 ASCII 32 - 254 -
E129-136 N° de composant, Caractère 3 ASCII 32 - 254 -
E137-144 N° de composant, Caractère 4 ASCII 32 - 254 -
E145-152 N° de composant, Caractère 5 ASCII 32 - 254 -
E153-160 N° de composant, Caractère 6 ASCII 32 - 254 -
E161-168 N° de composant, Caractère 7 ASCII 32 - 254 -
E169-176 N° de composant, Caractère 8 ASCII 32 - 254 -
E177-184 N° de composant, Caractère 9 ASCII 32 - 254 -
E185-192 N° de composant, Caractère 10 ASCII 32 - 254 -
E193-200 N° de composant, Caractère 11 ASCII 32 - 254 -
N° d’ordre Description du signal Plage Activité
A01 Arc électrique stable - High
A02 Signal limite (uniquement en relati-
on avec RCU 5000i)
- High
A03 Processus actif - High
A04 Signal courant principal - High
A05 Protection collision torche - High
A06 Source de courant prête - High
A07 Communication prête - High
A08 Non utilisé - -
A09 - A16 Numéro d’erreur - High
A17 - 24 Non utilisé - -
A25 Contrôle collage - High
A26 Non utilisé - -
A27 Accès robot (uniquement en relati-
on avec RCU 5000i)
A28 Fil disponible - High
A29 Durée dépassée court-circuit - High
- High
100
 Loading...
Loading...