

Page 1

Fronius prints on elemental chlorine free paper (ECF) sourced from certified sustainable forests (FSC).
/ Perfect Charging / Perfect Welding / Solar Energy
AB EtherNet/IP (Industrial Protocol)
Manual de instrucciones
ES
操作手順
JA
Instrukcja obsługi
PL
42,0410,2078 003-24012022
Page 2

Page 3

Tabla de contenido
Generalidades 5
Seguridad 5
Principios 5
Concepto del sistema 5
Conexiones a la interface 5
Ejemplo de aplicación 6
Conexión y configuración de AB EtherNet/IP 7
Seguridad 7
Generalidades 7
Conexiones, posibilidades de ajuste e indicaciones en el módulo de bus Anybus-S EtherNet/IP 7
Conexión a la interface AB EtherNet/IP 8
Asignación de conectores para la conexión EtherNet RJ 45 8
Configuración TCP/IP 8
Diagnóstico de errores, subsanación de errores en el circuito impreso UBST1 10
Estado de funcionamiento de los LED en el circuito impreso UBST 1 10
LED "+5 V" (1) 10
LED "Traffic 1 - 4" (2) 10
LED "L1 - L7" (3) 11
LED "EXT" (4) 11
Puente "EXT" (5) / puente "INT" (6) 11
LED "INT" (7) 12
LED "VCC" (8) 12
Diagnóstico de errores, subsanación de errores en el módulo de bus Anybus-S EtherNet/IP 13
Indicación LED en el módulo de bus Anybus-S EtherNet/IP 13
Conexión LED/actividad (1) 13
Estado del módulo LED (2) 13
Estado de la red LED (3) 13
Actividad LED (4) 14
Indicación de estado Anybus-S 14
Características de la transmisión de datos y datos técnicos 15
Características de la transmisión de datos 15
Dispositivo de seguridad 15
Datos técnicos AB EtherNet/IP 15
Descripción de señal AB EtherNet/IP 16
Generalidades 16
Modos de operación de la fuente de potencia 16
Sinopsis 16
Señales de entrada y salida para MIG/MAG Standard-/Puls-Synergic y CMT 17
Señales de entrada (del robot a la fuente de potencia) 17
Señales de salida (fuente de potencia al robot) 20
Señales de entrada y salida para TIG 23
Señales de entrada (del robot a la fuente de potencia) 23
Ajuste TIG área de pulso 26
Señales de salida (fuente de potencia al robot) 26
Señales de entrada y salida para CC/CV 29
Señales de entrada (del robot a la fuente de potencia) 29
Señales de salida (fuente de potencia al robot) 31
Señales de entrada y salida para manual estándar 35
Señales de entrada (del robot a la fuente de potencia) 35
Señales de salida (fuente de potencia al robot) 37
Ejecución objetos CIP 41
Ejecución objetos CIP 41
Objeto Identity, clase 01h 42
Funciones compatibles 42
Características de la clase 42
Características de la instancia 42
Estado del dispositivo 43
Función Reset 43
Message Router, clase 02h 44
Funciones compatibles 44
ES
3
Page 4

Características de la clase 44
Características de la instancia 44
Objeto Assembly, clase 04h 45
Descripción del objeto 45
Funciones compatibles 45
Características de la clase 45
Características de la instancia 03h (Heartbeat, Input-Only) 45
Características de la instancia 04h (Heartbeat, Listen-Only) 45
Características de la instancia 05h (datos de configuración) 45
Características de la instancia 64h...69h (instancias de producción) 45
Características de la instancia 96h...9Bh (instancias de consumo) 46
Connection Manager, clase 06h 47
Funciones compatibles 47
Características de la instancia 47
Información de conexión, clase 1 47
Conexiones de clase 1 47
Información de conexión, clase 3 48
Objeto Port, clase F4h 49
Funciones compatibles 49
Características de la clase 49
Características de la instancia 02h 49
Objeto TCP/IP Interface, clase F5h 50
Descripción del objeto 50
Funciones compatibles 50
Características de la clase 50
Características de la instancia 50
Objeto EtherNet Link, clase F6h 52
Descripción del objeto 52
Funciones compatibles 52
Características de la clase 52
Características de la instancia 52
Objeto Diagnostic, clase AAh 53
Descripción del objeto 53
Funciones compatibles 53
Características de la clase 53
Características de la instancia 01h 53
Objeto I/O Data Input Mapping, clase A0h 54
Descripción del objeto 54
Funciones compatibles 54
Características de la clase 54
Características de la instancia 01h 54
Objeto I/O Data Output Mapping, clase A1h 55
Descripción del objeto 55
Funciones compatibles 55
Características de la clase 55
Características de la instancia 01h 55
Objeto Data Input Mapping, clase B0h 56
Descripción del objeto 56
Funciones compatibles 56
Características de la clase 56
Características de la instancia 56
Objeto Parameter Data Output Mapping, clase B1h 57
Descripción del objeto 57
Funciones compatibles 57
Características de la clase 57
Características de la instancia 01h 57
Configurar la comunicación E/S entre AB EtherNet/IP y ControlLogix5000 58
Crear SoftLogix5860 Controller 58
Crear módulo SoftLogix5800 EtherNet IP 59
Configurar RSLogix5000 59
Modificar TAG 64
Comando Escribir 64
Comando leer 64
4
Page 5

Generalidades
(2)
(1)
(3) (4)
(1)
)5()1(
ES
Seguridad
Peligro originado por un manejo incorrecto y trabajos realizados incorrectamente.
La consecuencia pueden ser graves daños personales y materiales.
▶
▶
▶
Principios Módulo de bus Anybus-S EtherNet/IP
El módulo de bus Anybus-S EtherNet/IP es un adaptador completo de EtherNet/IP. Contiene todos los componentes analógicos y digitales de una potente interface EtherNet/IP.
Un microprocesador integrado se encarga automáticamente del protocolo de bus EtherNet/IP y libera al procesador principal del dispositivo de automatización del procesamiento del protocolo.
El módulo de bus Anybus-S EtherNet/IP se utiliza para la transmisión de grandes
volúmenes de datos con un alto rendimiento y la máxima fiabilidad.
El módulo de bus Anybus-S EtherNet/IP soporta velocidades de transmisión de 10 y 100
Mbit/s.
¡PELIGRO!
Todos los trabajos y funciones descritos en este documento deben ser realizados
solo por personal técnico formado.
Leer y comprender por completo este documento.
Leer y comprender todas las normas de seguridad y documentaciones para el usuario de este equipo y los componentes del sistema.
Concepto del sistema
Conexiones a la
interface
La interface AB EtherNet/IP contiene un circuito impreso UBST 1 sobre el que se construye un módulo de bus Anybus-S Ether-Net/IP. En el CFM del circuito impreso UBST se
almacena toda la información de una conexión EtherNet/IP.
(1) Cubierta ciega
(2) Conexión LocalNet
para conectar el juego de cables
de interconexión
(3) Conexión LocalNet
para conectar el resto de componentes del sistema
(4) Conexión LocalNet
(5) Conexión EtherNet RJ 45
para conectar el resto de componentes del sistema
para conectar el cable de datos EtherNet IP
5
Page 6

Ejemplo de apli-
(1) (2)
(3)
(4)
(5)
(6) (7)
(8)
(9)
(10)
cación
(1) Fuente de potencia (6) Control del robot
(2) Refrigeración (7) Bidón de hilo de soldadura
(3) AB EtherNet/IP (8) Robot
(4) Juego de cables de intercone-
(9) Antorcha de soldadura
xión
(5) Cable de datos EtherNet/IP (10) Avance de hilo
6
Page 7

Conexión y configuración de AB EtherNet/IP
(1)
(2)
(3)
(4)
(5)
ES
Seguridad
¡PELIGRO!
Peligro originado por un manejo incorrecto y trabajos realizados incorrectamente.
La consecuencia pueden ser graves daños personales y materiales.
Todos los trabajos y funciones descritos en este documento deben ser realizados
▶
solo por personal técnico formado.
Leer y comprender por completo este documento.
▶
Leer y comprender todas las normas de seguridad y documentaciones para el usua-
▶
rio de este equipo y los componentes del sistema.
¡PELIGRO!
Peligro originado por corriente eléctrica.
La consecuencia pueden ser graves daños personales y materiales.
Se deben apagar y separar de la red de corriente todos los equipos y componentes
▶
antes de comenzar los trabajos.
Asegurar todos los equipos y componentes contra cualquier reconexión.
▶
Después de abrir el equipo y con la ayuda de un aparato de medición adecuado,
▶
asegurarse de que los componentes con carga eléctrica (por ejemplo, condensadores) estén descargados.
Generalidades La conexión y la configuración de la interface AB EtherNet/IP tiene lugar en el módulo
de bus Anybus-S
EtherNet/IP.
Conexiones, posibilidades de
ajuste e indicaciones en el
módulo de bus
Anybus-S EtherNet/IP
(1) Interface al circuito impreso UBST 1
(2) Borna de conexión Ethernet
(3) Interruptor de configuración TCP/IP (no está en uso)
(4) Indicación LED
(5) Indicación de estado Anybus-S
7
Page 8

Conexión a la in-
(1)
(3)
(2)
1 8
terface AB EtherNet/IP
¡OBSERVACIÓN!
Mientras la interface del robot esté conectada a LocalNet, el modo "Operación de 2 tiempos" se selecciona automáticamente (indicación: modo de
operación de 2 tiempos).
Encontrará información más detallada sobre la opción "Modo especial de 2 tiempos
para la interface de robot" en el manual de
instrucciones de la fuente de potencia.
Conectar el conector de LocalNet del
1
juego de cables de interconexión a la
conexión LocalNet (1)
Conectar el cable de datos
2
EtherNet/IP a la conexión Ethernet RJ
45
Asignación de
conectores para
la conexión EtherNet RJ 45
Configuración
TCP/IP
Pin Señal Nota
1 TD+ 2 TD- 3 RD+ 4 - Normalmente no se utiliza; para asegurar la integridad de
5 -
la señal, estos pines están conectados entre sí y terminan
en el conductor protector (PE) a través de un circuito de fil-
tro.
6 RD- 7 - Normalmente no se utiliza; para asegurar la integridad de
8 -
la señal, estos pines están conectados entre sí y terminan
en el conductor protector (PE) a través de un circuito de fil-
tro.
La configuración del módulo de bus Anybus-S EtherNet/IP tiene lugar mediante la puerta
Ethernet:
- Inicio / Programas / Fronius Product Group / Módulo de servicio
- Seleccionar la entrada de puerta Ethernet (n.º: xxxxxxxx)
- Pulsar el botón "Configuración"
8
Page 9

ES
9
Page 10

Diagnóstico de errores, subsanación de errores en
(2)
(3)
(1)
(8)
(4)
(7)
(5)
(6)
el circuito impreso UBST1
Estado de funcionamiento de los
LED en el circuito
impreso UBST 1
(1) LED "+5 V" (5) Puente "EXT"
(2) LED "Traffic 1 - 4" (6) Puente "INT"
(3) LED "L1 - L7" (7) LED "INT"
(4) LED "EXT" (8) LED "VCC"
LED "+5 V" (1) El LED "+5 V" (1) se ilumina cuando se conecta la alimentación de tensión interna o ex-
LED "Traffic 1 4" (2)
terna. El LED "+5 V" indica que la electrónica del circuito impreso está bien.
LED Indicación Significado Solución
Traffic X Se ilumina o está
desconectado
Traffic X Parpadea Comunicación activa en
No hay comunicación en
Fronius LocalNet
Fronius LocalNet
Comprobar la alimentación de tensión y el
cableado
-
10
Page 11

LED "L1 - L7" (3)
(a) (b) (c)
LED Indicación Significado Solución
L1 Se ilumina/parpa-
dea
Se ha producido un error
en el módulo
Ver el número de error
según la tabla/servicio
técnico
ES
L2 Iluminado Comunicación activa en
-
Fronius LocalNet
El LED "L1" está iluminado:
La descripción del error y su indicación correspondiente en la fuente de potencia se describen en la hoja adjunta "Interface de robot" (42,0410,0616):
Capítulo "Señales de salida hacia el robot", sección "Número de error UBST"
El LED "L1" parpadea. La forma de parpadear señala el error:
(a) Parpadeo rápido:
inicio del código de error
(b) Primer impulso lento: Tipo de error
(c) Segundo impulso lento:
localización de error
Código
de error
1 1 Tamaño de trama máx. de Ethernet
Argumento
de error
Descripción del error Solución
Desconectar y
superado
conectar la inter-
face.
2 Tipo de buzón erróneo 4 Flujo insuficiente de datos UDP al
-
puerto 15000
5 Flujo excesivo de datos UDP 6 Flujo insuficiente de datos UDP a
-
15001
7 Puerto UDP erróneo 8 Error al iniciar la pila 9 Acceso a la función no válido -
LED "EXT" (4) El LED "EXT" (4) se ilumina cuando la alimentación de tensión externa se selecciona
mediante el puente "EXT" (5).
Puente "EXT"
(5) / puente "INT"
(6)
Los puentes "EXT" (5) e "INT" (6) sirven para elegir entre la alimentación de tensión externa o interna. En el estado de suministro, el puente se encuentra en el modo "Alimentación de tensión externa".
11
Page 12

LED "INT" (7) El LED "INT" (7) se ilumina cuando la alimentación de tensión interna se selecciona me-
diante el puente "INT" (6).
LED "VCC" (8) El LED "VCC" (8) se ilumina cuando se conecta la alimentación de tensión interna o ex-
terna. El LED "VCC" indica que la alimentación de tensión + 24 V para los componentes
del lado de LocalNet en la dirección externa están bien.
12
Page 13

Diagnóstico de errores, subsanación de errores en
(2)
(4)
(1)
(3)
el módulo de bus Anybus-S EtherNet/IP
Indicación LED
en el módulo de
bus Anybus-S EtherNet/IP
Conexión LED/
actividad (1)
Indicación Significado
Está iluminado en
verde
Conexión solicitada
(1) Conexión/actividad
(2) Estado del módulo
(3) Estado de la red
(4) Actividad
ES
Estado del módulo LED (2)
Estado de la red
LED (3)
Apagado Conexión no solicitada
Indicación Significado
Está iluminado en
verde
Parpadea en verde No configurado o escáner sin carga
Parpadea en rojo Se ha detectado un pequeño error subsanable
Está iluminado en
rojo
Parpadea en verde/
rojo
Apagado Ninguna alimentación principal
Indicación Significado
Está iluminado en
verde
Monitorización a través de un escáner en funcionamiento
Se ha detectado error grave y sin solución
Se está realizando una autocomprobación
En línea, una o más conexiones disponibles (categoría CIP 1 o
3)
Parpadea en verde En línea, ninguna conexión disponible
Está iluminado en
rojo
Dirección IP duplicada detectada, error interno (Fatal error)
13
Page 14

Parpadea en rojo Tiempo de espera para una o más conexiones (categoría CIP 1
o 3)
Actividad LED (4)
Indicación de estado Anybus-S
Parpadea en verde/
rojo
Apagado Sin alimentación principal o dirección IP
Indicación Significado
Parpadea en verde Cada parpadeo indica la recepción o el envío de un paquete de
Se está realizando una autocomprobación
datos Ethernet
La indicación del estado Anybus-S es un
LED en la superficie del módulo de bus
Anybus-S Interbus Fibre Optic. Esta indica
los siguientes errores y estados:
La indicación del estado se ilumina en
rojo
Error interno o funcionamiento en modo
de gestor de arranque
La indicación del estado se ilumina en
rojo, 1 Hz
Error en la memoria de configuración RAM
La indicación del estado se ilumina en
rojo, 2 Hz
Error en ASIC o FLASH
La indicación del estado se ilumina en
rojo, 4 Hz
Error en DPRAM
La indicación del estado se ilumina en
verde, 2 Hz
Módulo de bus no iniciado
La indicación del estado se ilumina en
verde, 1 Hz
Módulo de bus iniciado, funcionamiento
normal
14
Page 15

Características de la transmisión de datos y datos
técnicos
Características
de la transmisión
de datos
Dispositivo de
seguridad
ES
Técnica de transmisión EtherNet
Topología de la red Estrella
Medio Cable de par trenzado
Índice de transmisión 10 o 100 Mbit/s
Conexión de bus EtherNet RJ 45
Anchura de datos de proceso 296 Bit (configuración estándar)
Formato de datos de proceso Intel
Si la transmisión de datos falla, todas las entradas y salidas se reinician y la fuente de
potencia se encuentra en estado "Stop". Una vez restaurada la transmisión de datos, el
proceso se reanuda mediante las siguientes señales:
- Señal "Robot listo"
- Señal "Reconocer el fallo de la fuente"
Datos técnicos
AB EtherNet/IP
Alimentación de tensión interna
Posición de montaje En la parte trasera de las fuentes
de potencia:
Tipo de protección IP23
Interfaces de configura-
ción
mediante el módulo de bus de campo
TS 4000 / 5000
TPS 3200 / 4000 /
5000
15
Page 16

Descripción de señal AB EtherNet/IP
Generalidades Según el modo de operación configurado, la interface AB EtherNet/IP puede transmitir
distintas señales de entrada y salida.
Modos de operación de la fuente
de potencia
Sinopsis "Descripción de la señal AB EtherNet/IPl" se compone de los siguientes apartados:
Modo de operación E05 E04 E03
Soldadura MIG/MAG sinérgica estándar 0 0 0
Soldadura MIG/MAG Puls-Synergic 0 0 1
Modo Job 0 1 0
Selección de parámetros interna 0 1 1
Soldadura manual MIG/MAG estándar 1 0 0
CC/CV 1 0 1
Soldadura TIG 1 1 0
CMT/proceso especial 1 1 1
- Señales de entrada y salida para MIG/MAG Standard-/Puls-Synergic y CMT
- Señales de entrada y salida para TIG
- Señales de entrada y salida para CC/CV
- Señales de entrada y salida para manual estándar
16
Page 17

Señales de entrada y salida para MIG/MAG Standard-/Puls-Synergic y CMT
Señales de entrada (del robot a la
fuente de potencia)
N.º de serie
E01 Soldadura conectada - High (Alto)
E02 Robot preparado - High (Alto)
E03 Modos de operación Bit 0 - High (Alto)
E04 Modos de operación Bit 1 - High (Alto)
E05 Modos de operación Bit 2 - High (Alto)
E06 Identificación máster Twin - High (Alto)
E07 No se utiliza - E08 No se utiliza - -
E09 Test de gas - High (Alto)
E10 Avance de hilo - High (Alto)
E11 Retirada de hilo - High (Alto)
Designación de señal Margen Actividad
ES
E12 Confirmar error fuente - High (Alto)
E13 Búsqueda de posiciones - High (Alto)
E14 Limpiar por soplado la antorcha de
soldadura
E15 No se utiliza - E16 No se utiliza - -
E17/ E24 Número de Job 0 - 99 -
E25 - E31 Número del programa 0 - 127 E32 Simulación de soldadura - High (Alto)
Valor nominal de potencia 0 - 65535 (0 - 100 % ) E33-E40 Low Byte - E41-E48 High Byte - -
Valor nominal corrección de la lon-
gitud de arco voltaico
- High (Alto)
0 - 65535 (-30 - +30%)-
E49-E56 Low Byte - E57-E64 High Byte - E65-E72 Corrección de impulsos/de la
dinámica 1); valor nominal
0 - 255 (-5 - +5 %) -
17
Page 18

N.º de serie
E73-E80 No se utiliza - -
Designación de señal Margen Actividad
E81-E88 Valor nominal de combustión de re-
torno
E89-E96 No se utiliza - E97 - E104 Low Byte - E105-E112 High Byte - -
E113 Synchro Puls disable - High (Alto)
E114 SFI disable - High (Alto)
E115 Corrección de impulsos/de la
dinámica 1); disable
E116 Combustión de retorno disable - High (Alto)
E117 Rango completo de potencia (0 -
30m)
E118-E120 No se utiliza - -
E121 ROB I/O Output 1 - High (Alto)
E122 ROB I/O Output 2 - High (Alto)
0 - 255 (-200 - +200
ms)
- High (Alto)
- High (Alto)
-
E123-E128 No se utiliza - -
E129-E136 Número de componente, tipo 1 ASCII 32 - 254 -
E137-E144 Número de componente, tipo 2 ASCII 32 - 254 -
E145-E152 Número de componente, tipo 3 ASCII 32 - 254 -
E153-E160 Número de componente, tipo 4 ASCII 32 - 254 -
E161-E168 Número de componente, tipo 5 ASCII 32 - 254 -
E169-E176 Número de componente, tipo 6 ASCII 32 - 254 -
E177-E184 Número de componente, tipo 7 ASCII 32 - 254 -
E185-E192 Número de componente, tipo 8 ASCII 32 - 254 -
18
E193-E200 Número de componente, tipo 9 ASCII 32 - 254 -
Page 19

N.º de se-
Designación de señal Margen Actividad
rie
E201-E208 Número de componente, tipo 10 ASCII 32 - 254 -
E209-E216 Número de componente, tipo 11 ASCII 32 - 254 -
ES
Avance de hilo externo
0 - 65535 -
Valor real de velocidad de hilo
E217-E224 Low Byte - E225-E232 High Byte - -
E233-E240 Avance de hilo externo
0 - 255 -
Error principal
E241-E248 Avance de hilo externo
0 - 255 -
Error secundario
E249 Avance de hilo externo enable - High (Alto)
E250-E256 No se utiliza - -
E257 Comando leer TAG - SF
E258 Comando escribir TAG - SF
E259-E264 No se utiliza - -
Dirección TAG -
2)
E265-E272 Low Byte - E273-E280 High Byte - Valor TAG -
2)
E281-E288 Low Byte - E289-E296 High Byte - -
1)
Según el procedimiento seleccionado y el programa de soldadura ajustado, se
especifican distintos parámetros:
Procedimiento Parámetro
Pulsado Corrección de impulsos
Estándar Corrección dinámica
CMT Tiempo Hotstart
Corrección de impulsos
Hotstart ciclos de pulsado
Corrección de Boost
Corrección dinámica
19
Page 20

2)
Ver tabla TAG
SF Flanco ascendente
Señales de salida
(fuente de potencia al robot)
N.º de se-
Designación de señal Margen Actividad
rie
A01 Arco voltaico estable - High (Alto)
A02 Señal límite
- High (Alto)
(solo en combinación con RCU
5000i)
A03 Proceso activo - High (Alto)
A04 Señal de corriente principal - High (Alto)
A05 Protección anticolisión de la antor-
- High (Alto)
cha de soldadura
A06 Fuente de potencia preparada - High (Alto)
A07 Comunicación preparada - High (Alto)
A08 Life Cycle Toggle Bit cada 250 ms -
A09 - A16 Número de error 0 - 255 -
A17 - A24 No se utiliza - -
A25 Control de adhesión por quemadu-ra- High (Alto)
A26 No se utiliza - A27 Acceso al robot
- High (Alto)
(solo en combinación con RCU
5000i)
A28 Hilo disponible - High (Alto)
A29 Cortocircuito tiempo excedido - High (Alto)
A30 Documentación de datos lista
- High (Alto)
(solo en combinación con RCU
5000i)
A31 No se utiliza - A32 Potencia fuera del rango - High (Alto)
Valor real de tensión de soldadura 0 - 65535 (0 - 100 V) -
A33 - A40 Low Byte - A41 - A48 High Byte - -
Valor real de corriente de soldadu-ra0 - 65535 (0 - 1000
-
A)
A49 - A56 Low Byte - -
20
A57 - A64 High Byte - -
Page 21

N.º de serie
A65 - A72 Valor real de corriente del motor 0 - 255 (0 - 5 A) -
A73 - A80 No se utiliza - -
A81 - A88 No se utiliza - -
A89 - A96 No se utiliza - -
Designación de señal Margen Actividad
ES
Velocidad de hilo 0 - 65535
(-327,68 - +327,67 m/
min)
A97 - A104 Low Byte - A105-A112 High Byte - -
A113-A120 No se utiliza - -
A121 ROB I/O Input 1 - High (Alto)
A122 ROB I/O Input 2 - High (Alto)
A123 ROB I/O Input 3 - High (Alto)
A124 ROB I/O Input 4 - High (Alto)
A125-A128 No se utiliza - -
A129 Límite superior de velocidad de hi-lo- High (Alto)
A130 Límite inferior de velocidad de hilo - High (Alto)
A131 Límite superior de corriente - High (Alto)
A132 Límite inferior de corriente - High (Alto)
A133 Límite superior de tensión - High (Alto)
-
A134 Límite inferior de tensión - High (Alto)
A135 Límite superado motor principal - High (Alto)
A136 Límite superado motor PushPull - High (Alto)
A137 Límite superado velocidad de sol-
dadura
A138 Límite no alcanzado velocidad de
soldadura
A139-A144 No se utiliza - -
A145-A152 No se utiliza - A153-A160 No se utiliza - A161-A168 No se utiliza - A169-A176 No se utiliza - A177-A184 No se utiliza - A185-A192 No se utiliza - -
- High (Alto)
- High (Alto)
21
Page 22

N.º de se-
Designación de señal Margen Actividad
rie
A193-A200 No se utiliza - A201-A208 No se utiliza - A209-A216 No se utiliza - -
Avance de hilo externo
Valor nominal velocidad de hilo
0 - 65535
(-327,68 - +327,67 m/
-
min)
A217-A224 Low Byte - A225-A232 High Byte - -
Avance de hilo externo
Rampa velocidad de hilo
0x3A98
(15 m/min / s)
-
A233-A240 Low Byte - A241-A248 High Byte - -
A249-A256 No se utiliza - -
A257 TAG estado leer - High (Alto)
A258 TAG estado escribir - High (Alto)
A259-A264 No se utiliza - -
Dirección TAG -
2)
A265-A272 Low Byte - A273-A280 High Byte - -
Valor TAG -
A281-A288 Low Byte - A289-A296 High Byte - -
2)
Ver tabla TAG
2)
22
Page 23

Señales de entrada y salida para TIG
ES
Señales de entrada (del robot a la
fuente de potencia)
N.º de serie
E01 Soldadura conectada - High (Alto)
E02 Robot preparado - High (Alto)
E03 Modos de operación Bit 0 - High (Alto)
E04 Modos de operación Bit 1 - High (Alto)
E05 Modos de operación Bit 2 - High (Alto)
E06 No se utiliza - E07 No se utiliza - E08 No se utiliza - -
E09 Test de gas - High (Alto)
E10 Avance de hilo - High (Alto)
E11 Retirada de hilo - High (Alto)
E12 Confirmar error fuente - High (Alto)
E13 Búsqueda de posiciones - High (Alto)
E14 KD disable - High (Alto)
Designación de señal Margen Actividad
E15 No se utiliza - E16 No se utiliza - -
E17 - E24 Número de Job 0 - 99 -
E25 CC/CA - High (Alto)
E26 CC -/CA + - High (Alto)
E27 Formación de calota - High (Alto)
E28 Pulsos disable - High (Alto)
E29 Selección área pulso Bit 0 - High (Alto)
E30 Selección área pulso Bit 1 - High (Alto)
E31 Selección área pulso Bit 2 - High (Alto)
E32 Simulación de soldadura - High (Alto)
Valor nominal corriente principal 0 - 65535 (0 - máx.) E33 - E40 Low Byte - E41 - E48 High Byte - -
Parámetro externo, valor nomi-
nal
E49 - E56 Low Byte - -
0 - 65535 -
23
Page 24

N.º de serie
E57 - E64 High Byte - -
E65 - E72 Valor nominal de corriente bási-ca0 - 255 (0 - 100 %) -
E73 - E80 No se utiliza - -
E81 - E88 Duty-Cycle, valor nominal 0 - 255 (10 - 90 %) E89 - E96 No se utiliza - -
Designación de señal Margen Actividad
Valor nominal de velocidad de
hilo
Wf.1
E97 - E104 Low Byte - E105-E112 High Byte - -
E113 No se utiliza - E114 No se utiliza - E115 Corriente básica disable - High (Alto)
E116 Duty Cycle disable - High (Alto)
E117-E120 No se utiliza - -
E121 ROB I/O Output 1 - High (Alto)
E122 ROB I/O Output 2 - High (Alto)
E123-E128 No se utiliza - -
E129-E136 Número de componente, tipo 1 ASCII 32 - 254 -
0 - 65535
(-327,67 - +327,67 m/
min)
-
24
E137-E144 Número de componente, tipo 2 ASCII 32 - 254 -
E145-E152 Número de componente, tipo 3 ASCII 32 - 254 -
E153-E160 Número de componente, tipo 4 ASCII 32 - 254 -
E161-E168 Número de componente, tipo 5 ASCII 32 - 254 -
E169-E176 Número de componente, tipo 6 ASCII 32 - 254 -
E177-E184 Número de componente, tipo 7 ASCII 32 - 254 -
Page 25

N.º de se-
Designación de señal Margen Actividad
rie
E185-E192 Número de componente, tipo 8 ASCII 32 - 254 -
E193-E200 Número de componente, tipo 9 ASCII 32 - 254 -
E201-E208 Número de componente, tipo 10 ASCII 32 - 254 -
E209-E216 Número de componente, tipo 11 ASCII 32 - 254 -
ES
Avance de hilo externo
0 - 65535 -
Valor real de velocidad de hilo
E217-E224 Low Byte - E225-E232 High Byte - -
E233-E240 Avance de hilo externo
0 - 255 -
Error principal
E241-E248 Avance de hilo externo
0 - 255 -
Error secundario
E249 Avance de hilo externo enable - High (Alto)
E250-E256 No se utiliza - -
E257 Comando leer TAG - SF
E258 Comando escribir TAG - SF
E259-264 No se utiliza - -
Dirección TAG -
2)
E265-272 Low Byte - E273-280 High Byte - -
Valor TAG -
E281-288 Low Byte - E289-296 High Byte - -
2)
Ver tabla TAG
Flanco ascendente
SF
2)
25
Page 26

Ajuste TIG área
de pulso
Selección área E31 E30 E29
Ajuste del área de pulso en la fuente
de potencia
Área de ajuste de pulso desactivada 0 0 1
0,2 - 2 Hz 0 1 0
2 - 20 Hz 0 1 1
20 - 200 Hz 1 0 0
200 - 2000 Hz 1 0 1
0 0 0
Señales de salida
(fuente de potencia al robot)
N.º de serie
A01 Arco voltaico estable - High (Alto)
A02 No se utiliza - A03 Proceso activo - High (Alto)
A04 Señal de corriente principal - High (Alto)
A05 Protección anticolisión de la an-
A06 Fuente de potencia preparada - High (Alto)
A07 Comunicación preparada - High (Alto)
A08 Life Cycle Toggle Bit cada 250 ms -
A09 - A16 Número de error 0 - 255 -
A17 - A24 No se utiliza - -
A25 No se utiliza - A26 Alta frecuencia activa - High (Alto)
Designación de señal Margen Actividad
- High (Alto)
torcha de soldadura
26
A27 No se utiliza - A28 Hilo disponible (hilo frío) - High (Alto)
A29 No se utiliza - A30 No se utiliza - A31 Pulso High - High (Alto)
A32 No se utiliza - -
Valor real de tensión de soldadu-ra0 - 65535 (0 - 100 V) -
A33 - A40 Low Byte - A41 - A48 High Byte - -
Valor real de corriente de solda-
dura
0 - 65535 (0 - 1000 A) -
Page 27

N.º de serie
A49 - A56 Low Byte - A57 - A64 High Byte - -
Designación de señal Margen Actividad
ES
A65 - A72 Valor real de corriente del motor
(hilo frío)
A73 - A80 No se utiliza - -
A81 - A88 Longitud de arco voltaico, valor
real (AVC)
A89 - A96 No se utiliza - -
Valor real de velocidad de hilo
(hilo frío)
A97 - A104 High Byte - A105-A112 Low Byte - -
A113-A120 No se utiliza - -
A121 ROB I/O Input 1 - High (Alto)
A122 ROB I/O Input 2 - High (Alto)
0 - 255 (0 - 5 A) -
0 - 255 (0 - 50 V) -
0 - 65535
(-327,68 - +327,68 m/
min)
-
A123 ROB I/O Input 3 - High (Alto)
A124 ROB I/O Input 4 - High (Alto)
A125-A128 No se utiliza - -
A129-A136 No se utiliza - A137-A144 No se utiliza - A145-A152 No se utiliza - A153-A160 No se utiliza - A161-A168 No se utiliza - A169-A176 No se utiliza - A177-A184 No se utiliza - A185-A192 No se utiliza - A193-A200 No se utiliza - A201-A208 No se utiliza - A209-A216 No se utiliza - -
Avance de hilo externo
Valor nominal velocidad de hilo
0 - 65535
(-327,68 - +327,67 m/
min)
-
A217-A224 Low Byte - A225-A232 High Byte - -
27
Page 28

N.º de serie
Designación de señal Margen Actividad
Avance de hilo externo
Rampa velocidad de hilo
0x3A98
(15 m/min / s)
-
A233-A240 Low Byte - A241-A248 High Byte - -
A249-A256 No se utiliza - -
A257 Leer estado TAG - High (Alto)
A258 Escribir estado TAG - High (Alto)
A259-A264 No se utiliza - -
Dirección TAG -
2)
A265-A272 Low Byte - A273-A280 High Byte - -
Valor TAG -
2)
A281-A288 Low Byte - A289-A296 High Byte - -
2)
Ver tabla TAG
28
Page 29

Señales de entrada y salida para CC/CV
ES
Señales de entrada (del robot a la
fuente de potencia)
N.º de serie
E01 Soldadura conectada - High (Alto)
E02 Robot preparado - High (Alto)
E03 Modos de operación Bit 0 - High (Alto)
E04 Modos de operación Bit 1 - High (Alto)
E05 Modos de operación Bit 2 - High (Alto)
E06 Identificación máster Twin - High (Alto)
E07 No se utiliza - E08 No se utiliza - -
E09 Test de gas - High (Alto)
E10 Avance de hilo - High (Alto)
E11 Retirada de hilo - High (Alto)
E12 Confirmar error fuente - High (Alto)
E13 Búsqueda de posiciones - High (Alto)
E14 Limpiar la antorcha por soplado - High (Alto)
Designación de señal Margen Actividad
E15 No se utiliza - E16 No se utiliza - -
E17 - E24 Número de Job 0 - 99 -
E25-E31 No se utiliza - E32 Simulación de soldadura - High (Alto)
Valor nominal corriente de sol-
dadura
E33 - E40 Low Byte - E41 - E48 High Byte - -
Velocidad de hilo 0 - 65535
E49 - E56 Low Byte - E57 - E64 High Byte - -
0 - 65535 (0 - máx.) -
(-327,67 - +327,67 m/
min)
E65 - E72 Tensión de soldadura 0 - 255 (0 - U
) -
max
29
Page 30

N.º de serie
E73 - E80 No se utiliza - -
E81 - E88 No se utiliza - -
E89 - E96 No se utiliza - -
No se utiliza - E97 - E104 Low Byte - E105-E112 High Byte - -
E113-E120 No se utiliza - -
E121 ROB I/O Output 1 - High (Alto)
E122 ROB I/O Output 2 - High (Alto)
E123-E128 No se utiliza - -
Designación de señal Margen Actividad
E129-E136 Número de componente, tipo 1 ASCII 32 - 254 -
E137-E144 Número de componente, tipo 2 ASCII 32 - 254 -
E145-E152 Número de componente, tipo 3 ASCII 32 - 254 -
E153-E160 Número de componente, tipo 4 ASCII 32 - 254 -
E161-E168 Número de componente, tipo 5 ASCII 32 - 254 -
E169-E176 Número de componente, tipo 6 ASCII 32 - 254 -
E177-E184 Número de componente, tipo 7 ASCII 32 - 254 -
E185-E192 Número de componente, tipo 8 ASCII 32 - 254 -
30
E193-E200 Número de componente, tipo 9 ASCII 32 - 254 -
E201-E208 Número de componente, tipo 10 ASCII 32 - 254 -
E209-E216 Número de componente, tipo 11 ASCII 32 - 254 -
Page 31
N.º de se-
Designación de señal Margen Actividad
rie
Avance de hilo externo
0 - 65535 -
Valor real de velocidad de hilo
E217-E224 Low Byte - E225-E232 High Byte - -
ES
E233-E240 Avance de hilo externo
0 - 255 -
Error principal
E241-E248 Avance de hilo externo
0 - 255 -
Error secundario
E249 Avance de hilo externo enable - High (Alto)
E250-E256 No se utiliza - -
E257 Comando leer TAG - SF
E258 Comando escribir TAG - SF
E259-264 No se utiliza - -
Dirección TAG -
2)
E265-272 Low Byte - E273-280 High Byte - -
Valor TAG -
2)
Señales de salida
(fuente de potencia al robot)
E281-288 Low Byte - E289-296 High Byte - -
2)
Ver tabla TAG
Flanco ascendente
SF
N.º de se-
Designación de señal Margen Actividad
rie
A01 Arco voltaico estable - High (Al-
to)
A02 Señal límite
(solo en combinación con RCU
- High (Alto)
5000i)
A03 Proceso activo - High (Al-
to)
A04 Señal de corriente principal - High (Al-
to)
31
Page 32

N.º de serie
Designación de señal Margen Actividad
A05 Protección anticolisión de la antor-
cha de soldadura
A06 Fuente de potencia preparada - High (Al-
A07 Comunicación preparada - High (Al-
A08 Life Cycle Toggle Bit cada 250 ms -
A09 - A16 Número de error 0 - 255 -
A17 - A24 No se utiliza - -
A25 Control de adhesión por quemadu-ra- High (Al-
A26 No se utiliza - A27 Acceso al robot
(solo en combinación con RCU
5000i)
A28 Hilo disponible - High (Al-
- High (Alto)
to)
to)
to)
- High (Alto)
to)
A29 Cortocircuito tiempo excedido - High (Al-
to)
A30 Documentación de datos lista
(solo en combinación con RCU
5000i)
A31 No se utiliza - A32 Potencia fuera del rango - High (Al-
Valor real de tensión de soldadura 0 - 65535 (0 - 100 V) A33 - A40 Low Byte - A41 - A48 High Byte - -
Valor real de corriente de soldadu-ra0 - 65535 (0 - 1000 A) -
A49 - A56 Low Byte - A57 - A64 High Byte - -
A65 - A72 Valor real de corriente del motor 0 - 255 (0 - 5 A) -
- High (Alto)
to)
32
A73 - A80 No se utiliza - -
A81 - A88 No se utiliza - -
Page 33

N.º de serie
A89 - A96 No se utiliza - -
Designación de señal Margen Actividad
ES
Velocidad de hilo 0 - 65535
(-327,68 - +327,68 m/
min)
A97 - A104 Low Byte - A105-A112 High Byte - -
A113-A120 No se utiliza - -
A121 ROB I/O Input 1 - High (Al-
A122 ROB I/O Input 2 - High (Al-
A123 ROB I/O Input 3 - High (Al-
A124 ROB I/O Input 4 - High (Al-
A125-A128 No se utiliza - -
A129 Límite superior de velocidad de hi-lo- High (Al-
A130 Límite inferior de velocidad de hilo - High (Al-
-
to)
to)
to)
to)
to)
to)
A131 Límite superior de corriente - High (Al-
to)
A132 Límite inferior de corriente - High (Al-
to)
A133 Límite superior de tensión - High (Al-
to)
A134 Límite inferior de tensión - High (Al-
to)
A135 Corriente de motor avance de hilo - High (Al-
to)
A136 Corriente de motor unidad Push-
Pull
A137 Límite superior de velocidad de
soldadura
A138 Límite inferior de velocidad de sol-
dadura
A139-A144 No se utiliza - A145-A152 No se utiliza - -
- High (Alto)
- High (Alto)
- High (Alto)
A153-A160 No se utiliza - A161-A168 No se utiliza - A169-A176 No se utiliza - A177-A184 No se utiliza - -
33
Page 34

N.º de se-
Designación de señal Margen Actividad
rie
A185-A192 No se utiliza - A193-A200 No se utiliza - A201-A208 No se utiliza - A209-A216 No se utiliza - -
Avance de hilo externo
Valor nominal velocidad de hilo
0 - 65535
(-327,68 - +327,67 m/
min)
A217-A224 Low Byte - A225-A232 High Byte - -
Avance de hilo externo
Rampa velocidad de hilo
0x3A98
(15 m/min / s)
-
A233-A240 Low Byte - A241-A248 High Byte - -
A249-A256 No se utiliza - -
A257 Leer estado TAG High (Al-
to)
A258 Escribir estado TAG - High (Al-
to)
A259-A264 No se utiliza - -
Dirección TAG -
A265-A272 Low Byte - A273-A280 High Byte - -
Valor TAG -
A281-A288 Low Byte - A289-A296 High Byte - -
2)
Ver tabla TAG
2)
2)
34
Page 35

Señales de entrada y salida para manual estándar
ES
Señales de entrada (del robot a la
fuente de potencia)
N.º de serie
E01 Soldadura conectada - High (Alto)
E02 Robot preparado - High (Alto)
E03 Modos de operación Bit 0 - High (Alto)
E04 Modos de operación Bit 1 - High (Alto)
E05 Modos de operación Bit 2 - High (Alto)
E06 Identificación máster Twin - High (Alto)
E07 No se utiliza - E08 No se utiliza - -
E09 Test de gas - High (Alto)
E10 Avance de hilo - High (Alto)
E11 Retirada de hilo - High (Alto)
E12 Confirmar error fuente - High (Alto)
E13 Búsqueda de posiciones - High (Alto)
E14 Limpiar la antorcha por soplado - High (Alto)
Designación de señal Margen Actividad
E15 No se utiliza - E16 No se utiliza - -
E17 - E24 No se utiliza - -
E25-E31 Número del programa 0-127 E32 Simulación de soldadura - High (Alto)
Velocidad de hilo 0 - 65535 (0 - máx.)
(-327,67 - +327,67 m/
min)
E33 - E40 Low Byte - E41 - E48 High Byte - -
Tensión de soldadura 0 - 65535 (0 - U
E49 - E56 Low Byte - E57 - E64 High Byte - -
max
-
) -
E65 - E72 Corrección dinámica 0 - 255 (-5 - +5 %) -
E73 - E80 No se utiliza - -
35
Page 36

N.º de serie
Designación de señal Margen Actividad
E81 - E88 Valor nominal de combustión de
retorno
E89 - E96 No se utiliza - -
E97 - E104 Low Byte - E105-E112 High Byte - -
E113 No se utiliza - E114 No se utiliza - E115 Corrección de impulsos/de la
dinámica disable
E116 Combustión de retorno disable - High (Alto)
E117 Rango completo de potencia (0 -
30m)
E118-E120 No se utiliza - -
E121 ROB I/O Output 1 - High (Alto)
0 - 255 (-200 - +200
ms)
- High (Alto)
- High (Alto)
-
E122 ROB I/O Output 2 - High (Alto)
E123-E128 No se utiliza - -
E129-E136 Número de componente, tipo 1 ASCII 32 - 254 -
E137-E144 Número de componente, tipo 2 ASCII 32 - 254 -
E145-E152 Número de componente, tipo 3 ASCII 32 - 254 -
E153-E160 Número de componente, tipo 4 ASCII 32 - 254 -
E161-E168 Número de componente, tipo 5 ASCII 32 - 254 -
E169-E176 Número de componente, tipo 6 ASCII 32 - 254 -
E177-E184 Número de componente, tipo 7 ASCII 32 - 254 -
36
E185-E192 Número de componente, tipo 8 ASCII 32 - 254 -
E193-E200 Número de componente, tipo 9 ASCII 32 - 254 -
Page 37

N.º de se-
Designación de señal Margen Actividad
rie
E201-E208 Número de componente, tipo 10 ASCII 32 - 254 -
E209-E216 Número de componente, tipo 11 ASCII 32 - 254 -
ES
Avance de hilo externo
0 - 65535 -
Valor real de velocidad de hilo
E217-E224 Low Byte - E225-E232 High Byte - -
E233-E240 Avance de hilo externo
0 - 255 -
Error principal
E241-E248 Avance de hilo externo
0 - 255 -
Error secundario
E249 Avance de hilo externo enable - High (Alto)
E250-E256 No se utiliza - -
E257 Comando leer TAG - SF
E258 Comando escribir TAG - SF
E259-264 No se utiliza - -
Dirección TAG -
2)
Señales de salida
(fuente de potencia al robot)
E265-272 Low Byte - E273-280 High Byte - -
Valor TAG -
2)
E281-288 Low Byte - E289-296 High Byte - -
2)
Ver tabla TAG
N.º de se-
Designación de señal Margen Actividad
rie
A01 Arco voltaico estable - High (Alto)
A02 Señal límite
- High (Alto)
(solo en combinación con RCU
5000i)
A03 Proceso activo - High (Alto)
A04 Señal de corriente principal - High (Alto)
37
Page 38

N.º de serie
Designación de señal Margen Actividad
A05 Protección anticolisión de la antor-
cha de soldadura
A06 Fuente de potencia preparada - High (Alto)
A07 Comunicación preparada - High (Alto)
A08 Life Cycle Toggle Bit cada 250 ms -
A09 - A16 Número de error 0 - 255 -
A17 - A24 No se utiliza - -
A25 Control de adhesión por quemadu-ra- High (Alto)
A26 No se utiliza - A27 Acceso al robot
(solo en combinación con RCU
5000i)
A28 Hilo disponible - High (Alto)
A29 Cortocircuito tiempo excedido - High (Alto)
A30 Documentación de datos lista
(solo en combinación con RCU
5000i)
- High (Alto)
- High (Alto)
- High (Alto)
A31 No se utiliza - A32 Potencia fuera del rango - High (Alto)
Valor real de tensión de soldadura 0 - 65535 (0 - 100
V)
A33 - A40 Low Byte - A41 - A48 High Byte - -
Valor real de corriente de soldadu-ra0 - 65535 (0 - 1000A)-
A49 - A56 Low Byte - A57 - A64 High Byte - -
A65 - A72 Valor real de corriente del motor 0 - 255 (0 - 5 A) -
A73 - A80 No se utiliza - -
A81 - A88 No se utiliza - -
-
38
A89 - A96 No se utiliza - -
Page 39

N.º de serie
A97 - A104 Low Byte - A105-A112 High Byte - -
A113-A120 No se utiliza - -
A121 ROB I/O Input 1 - High (Alto)
A122 ROB I/O Input 2 - High (Alto)
A123 ROB I/O Input 3 - High (Alto)
A124 ROB I/O Input 4 - High (Alto)
A125-A128 No se utiliza - -
A129 Límite superior de velocidad de hi-lo- High (Alto)
A130 Límite inferior de velocidad de hilo - High (Alto)
A131 Límite superior de corriente - High (Alto)
Designación de señal Margen Actividad
Velocidad de hilo 0 - 65535
(-327,68 - +327,67
m/min)
-
ES
A132 Límite inferior de corriente - High (Alto)
A133 Límite superior de tensión - High (Alto)
A134 Límite inferior de tensión - High (Alto)
A135 Corriente de motor avance de hilo - High (Alto)
A136 Corriente de motor unidad Push-
Pull
A137 Límite superior de velocidad de
soldadura
A138 Límite inferior de velocidad de sol-
dadura
A139-A144 No se utiliza - A145-A152 No se utiliza - A153-A160 No se utiliza - A161-A168 No se utiliza - A169-A176 No se utiliza - A177-A184 No se utiliza - A185-A192 No se utiliza - -
- High (Alto)
- High (Alto)
- High (Alto)
A193-A200 No se utiliza - A201-A208 No se utiliza - A209-A216 No se utiliza - -
Avance de hilo externo
Valor nominal velocidad de hilo
0 - 65535
(-327,68 - +327,67
m/min)
39
Page 40

N.º de se-
Designación de señal Margen Actividad
rie
A217-A224 Low Byte - A225-A232 High Byte - -
Avance de hilo externo
Rampa velocidad de hilo
0x3A98
(15 m/min / s)
-
A233-A240 Low Byte - A241-A248 High Byte - -
A249-A256 No se utiliza - -
A257 Leer estado TAG High (Alto)
A258 Escribir estado TAG - High (Alto)
A259-A264 No se utiliza - -
Dirección TAG -
2)
A265-A272 Low Byte - A273-A280 High Byte - -
Valor TAG -
2)
A281-A288 Low Byte - A289-A296 High Byte - -
2)
Ver tabla TAG
40
Page 41

Ejecución objetos CIP
ES
Ejecución objetos CIP
AB EtherNet/IP permite la ejecución de los siguientes objetos CIP:
Objetos obligatorios Objetos específicos
- Objeto Identity, clase 01h - Objeto Diagnostic, clase AAh
- Message Router, clase 02h - Objeto I/O Data Input Mapping, cla-
se A0h
- Objeto Assembly, clase 04h - Objeto I/O Data Output Mapping,
clase A1h
- Connection Manager, clase 04h - Objeto Data Input Mapping, clase
B0h
- Objeto Port, clase F4h - Objeto Data Output Mapping, clase
B1h
- Objeto TCP/IP Interface, clase F5h
- Objeto EtherNet Link, clase F6h
Nota:
Para simplificar, las tablas que se muestran en las siguientes páginas se han dejado en
inglés.
41
Page 42

Objeto Identity, clase 01h
Funciones compatibles
Características
de la clase
Características
de la instancia
Funciones de la clase: Todas las características
Características individuales
Funciones de la instancia:
Características individuales
Reset
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
# Ac-
cess
Name Type Value Description
Name Type Value Description
Todas las características
1 Get Vendor ID UINT Default: 005Ah HMS Industrial Net-
works AB
2 Get Device Type UINT Default: 000Ch Communication
Adapter
3 Get Product Co-deUINT Default: 000Eh Anybus-S
EtherNet/IP
4 Get
5 Get Status WORD - Device status, see
6 Get Serial Num-
7 Get Product Na-meSHORT_STRING‘Anybus-S Et-
Revision
ber
Struct of:
USINT
USINT
UDINT Serial number (set at production)
herNet/IP’
-
Major fieldbus version
Minor fieldbus version
table below
Name of product
42
Page 43

Estado del dispositivo
bit(s) Name
0 Module Owned
1 (reserved, ignore)
2 Configured
3 (reserved, ignore)
4...7 Extended Device Status:
Value: Meaning:
000b Unknown
0010b Faulted I/O Connection
0011b No I/O connection established
0100b Non-volatile configuration bad
0110b Connection in Run mode
0111b Connection in Idle mode
(other) (reserved)
8 Set for minor recoverable faults
ES
9 Set for minor unrecoverable faults
10 Set for major recoverable faults
11 Set for major unrecoverable faults
12...15 (reserved, ignore)
Función Reset El objeto "Identity" cuenta con una función de reset con dos tipos diferentes de solicitu-
des de reinicio:
- Tipo 0: Power Cycling Reset
Esta solicitud de reinicio imita un ciclo de energía del módulo
- Tipo 1: "Out of Box" Reset
Esta solicitud de reinicio crea una configuración "Out of Box" y lleva a cabo el reinicio
El módulo está preajustado para que se restablezca solo cuando se reciba una solicitud
de reinicio. Con una solicitud de reinicio de tipo 1 se elimina el archivo de configuración
ethcfg.cfg.
Si se debe informar a la solicitud sobre un reinicio (por ejemplo, para un restablecimiento independiente), hay dos posibilidades:
1. Emitir el comando ENABLE_ID_RESET_NOTIFY al módulo durante la inicialización.
La función de reset hace que el módulo emita el comando ID_RESET_NOTIFY y
borra el archivo de configuración ethcfg.cfg si es necesario.
ID_RESET_NOTIFY especifica el tipo de solicitud de reinicio enviada. Luego le toca
a la aplicación reiniciarse a sí misma y al módulo.
2. Se debe establecer el bit RST en el estado del módulo para que responda la detección de interrupción de la inicialización de ambos módulos (ANYBUS_INIT).
La función de reset genera un mensaje de suceso. El tipo de solicitud de reinicio
emitida puede recuperarse con el comando GET_ID_RESET_PARAM. Luego le toca a la aplicación reiniciarse a sí misma y al módulo.
43
Page 44

Message Router, clase 02h
Funciones compatibles
Características
de la clase
Características
de la instancia
Funciones de la clase: -
Funciones de la instancia: -
-
-
44
Page 45

Objeto Assembly, clase 04h
ES
Descripción del
objeto
Funciones compatibles
Características
de la clase
El objeto Assembly garantiza el acceso a los datos E/S.
Funciones de la clase: Características individuales
Funciones de la instancia:
Ajuste de las características individuales
# Ac-
cess
1 Get Revision UINT 0002h Revisión 2
2 Get Max Instance UINT - The highest initiated
Name Type Value Description
Características individuales
instance no.
Características
de la instancia
03h (Heartbeat,
Input-Only)
Características
de la instancia
04h (Heartbeat,
Listen-Only)
Características
de la instancia
05h (datos de
configuración)
Características
de la instancia
64h...69h (instancias de producción)
La instancia 03h se usa como "Heartbeat" para las conexiones de "Input-Only" y no
transmite ningún dato.
La instancia 04h se usa como "Heartbeat" para las conexiones de "Listen-Only" y no
transmite ningún dato.
No hay características asignadas a la instancia 05h.
# Name Ac-
cess
3 Produced Data Get Array of BYTE This data corresponds to the
Type Value
Input I/O Data
A través del ajuste previo solo se activa la instancia 64h. Las demás se pueden crear a
partir de la aplicación, mediante la función I/O Data Mapping.
45
Page 46

Características
de la instancia
96h...9Bh (instancias de consumo)
# Name Ac-
cess
3 Consumed Data Set Array of BYTE This data corresponds to the
A través del ajuste previo solo se activa la instancia 96h. Las demás se pueden crear a
partir de la aplicación, mediante la función I/O Data Mapping.
Type Value
Output I/O Data.
46
Page 47

Connection Manager, clase 06h
ES
Funciones compatibles
Características
de la instancia
Información de
conexión, clase 1
Funciones de la clase: -
Funciones de la instancia:
Siguiente_Cerrar
no conectado_enviar
(solo cuando está activado el routing; ENABLE_ROUTING)
No hay características compatibles de la instancia
Las conexiones de clase 1 transmiten datos E/S y pueden crearse en instancias del objeto "Assembly". Cada conexión de clase 1 establece un transporte de datos de consumo y uno de producción.
Las instancias de "Heartbeat" pueden usarse para conexiones que solo permiten entradas.
Siguiente_Abrir
Conexiones de
clase 1
Las conexiones de clase 1 usan transportes UDP.
- Número total de las conexiones de clase 1 compatibles: 31
- Tamaño de la conexión de entrada máx.: 509 Bytes
- Tamaño de la conexión de salida máx.: 505 Bytes
- API compatible: 2 - 3200 ms
- Tipo de conexión T/O: Punto a punto, multicast
- Tipo de conexión O/T: Punto a punto
- Tipo de activación compatible: Cíclica
Conexión "Exclusive-Owner"
Este tipo de conexión controla las salidas del módulo Anybus y es independiente de
otras conexiones
- Número máximo de las conexiones "Exclusive-Owner": 1 por punto de conexión
- Punto de conexión O/T: Objeto "Assembly", instancia 96h (ajuste previo)
- Punto de conexión T/O: Objeto "Assembly", instancia 64h (ajuste previo)
Conexión "Input-Only"
Este tipo de conexión se emplea para leer datos del módulo Anybus sin controlar las salidas. La conexión "Input-Only" es independiente del resto.
- Número máximo de conexiones "Input-Only": hasta 31 (divididas entre conexiones
"Exclusive-Owner" e "Input-Only")
- Punto de conexión O/T: Objeto "Assembly", instancia 03h (ajuste previo)
- Punto de conexión T/O: Objeto "Assembly", instancia 64h (ajuste previo)
47
Page 48

¡IMPORTANTE!
Si se ha abierto una conexión "Exclusive-Owner" al módulo y se ha superado un
tiempo determinado (timeout), la conexión "Input-Only" también se ve afectada.
Si la conexión "Exclusive-Owner" está bien cerrada, la conexión "Input-Only" no se ve
afectada.
Conexión "Listen-Only"
Este tipo de conexión requiere una conexión adicional (por ejemplo, conexión "Exclusive-Owner" o "Input-Only"). Si la conexión está cerrada, la conexión "Listen-Only" también lo estará.
- Número máximo de conexiones "Input-Only": hasta 31 (divididas entre conexiones
"Exclusive-Owner" e "Input-Only")
- Punto de conexión O/T: Objeto "Assembly", instancia 043h (ajuste previo)
- Punto de conexión T/O: Objeto "Assembly", instancia 64h (ajuste previo)
Conexión "RedundanT-Owner"
Esta conexión no es compatible con el módulo
Información de
conexión, clase 3
Conexión de mensaje explícito
Las conexiones de clase 3 se utilizan para establecer conexiones con el enrutador de
mensajes. La conexión se utiliza para transmitir mensajes de forma explícita.
Las conexiones de clase 1 utilizan transporte TCP.
- Número de conexiones simultáneas de clase 3: 16
- API compatible: >/= 2 ms
- Tipo de conexión T/O: Punto a punto
- Tipo de conexión O/T: Punto a punto
- Tipo de activación compatible: Aplicación
48
Page 49

Objeto Port, clase F4h
ES
Funciones compatibles
Características
de la clase
Funciones de la clase: Todas las características
Características individuales
Funciones de la instancia:
Características individuales
# Access Name Type Value Description
1 Get Revision UINT 0001h Revisión 1
2 Get Max Instance UINT 0002h 2 is the highest ins-
3 Get No. of instan-
ces
8 Get Entry Port UINT 0002h Returns the instance
Todas las características
tance number
UINT 0001h 1 instance is imple-
mented
of the Port object
that describes the
port.
Características
de la instancia
02h
9 Get All Ports Array of
STRUCT
{UINT; UINT;}
# Access Name Type Value Comment
1 Get Port Type UINT 0004h TCP/IP
2 Get Port Number UINT 0002h Port 2
3 Get Port Object Struct of:
Path Size UINT 0002h Path Padded EPATH 20 F5 24 01h TCP class, Instance
0000h 0000h
0000h 0000h
0004h 0002h
Array of structure
containing attributes
1 and 2 from each
instance.
Instance 1 is at byte
offset 4.
Instance 2 is at byte
offset 8, etc.
The 4 bytes at offset
0 shall be 0. (Default)
1
4 Get Port Name SHORT_STIRNG ‘TCP/IP’ Name of port
8 Get Node Ad-
dress
Padded EPATH - -
49
Page 50

Objeto TCP/IP Interface, clase F5h
Descripción del
objeto
Funciones compatibles
Características
de la clase
El objeto de interface TCP/IP agrupa los ajustes relacionados con el TCP/IP.
Funciones de la clase: Todas las características
Características individuales
Funciones de la instancia:
Características individuales
Ajuste de las características individuales
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
2 Get Max Instance UINT 0001h 1 is the highest ins-
Name Type Value Description
Todas las características
tance number
Características
de la instancia
3 Get No. of instan-
ces
# Ac-
cess
1 Get Status DWORD - 2 Get Configuration
3 Get/SetConfiguration
4 Get Port Object Struct of: Path to Ethernet
Name Type Value Comments
Capability
Control
Path Size UINT 0002h
UINT 0001h 1 instance is imple-
mented
DWORD 00000014h - Attribute #5 is set-
table
- Capable of obtai-
ning network confi-
guration via DHCP.
DWORD - 0 = Configuration
from non-volatile
memory (i.e.
‘ethcfg.cfg’)
2 = Configuration
from DHCP
Class, Instance 1
50
Path Padded EPATH 20 F6 24 01h
Page 51

# Ac-
cess
5 Get/SetInterface
Name Type Value Comments
Configuration
IP Address UDINT - IP address
Subnet Mask UDINT - Subnet mask
Struct of:
ES
Gateway Address
Name Server1UDINT - Primary DNS
Name Server2UDINT - Secondary DNS
Domain Na-meSTRING - Default domain na-
6 Get/SetHost Name STRING - Host name
UDINT - Gateway Address
me
51
Page 52

Objeto EtherNet Link, clase F6h
Descripción del
objeto
Funciones compatibles
Características
de la clase
El objeto Ethernet Link agrupa la información de diagnóstico para la interface EtherNet.
Funciones de la clase: Todas las características
Características individuales
Funciones de la instancia:
Características individuales
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
2 Get Max Instance UINT 0001h 1 is the highest ins-
3 Get No. of instan-
Name Type Value Description
ces
Todas las características
tance number
UINT 0001h 1 instance is imple-
mented
Características
de la instancia
# Ac-
cess
1 Get Interface
2 Get Interface
3 Get Physical Ad-
6
Get/SetInterface
Name Type Value Comments
Speed
Flags
dress
Control
UDINT 10 o 100 Actual ethernet in-
terface speed
DWORD - -
Array of 6
USINTS
Struct of: - Auto-negotiation,
WORD
UINT
(MAC ID) Physical network
address
duplex, and speed.
52
Page 53

Objeto Diagnostic, clase AAh
ES
Descripción del
objeto
Funciones compatibles
Características
de la clase
Características
de la instancia
01h
El objeto Diagnostic agrupa la información de diagnóstico
Funciones de la clase: Todas las características
Funciones de la instancia:
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
# Ac-
01h Get Module serial number UDINT Serial number
Name Type Value Description
cess
Características individuales
Name Type Description
02h Get Vendor ID UINT Manufacturer Vendor ID
03h Get Fieldbus Type UINT Fieldbus Type
04h Get Module Software ver-
sion
0Ah Get Module Type UINT Module Type
0Fh Get IN cyclic I/O length UINT Size of I/O Input area (in bytes)
11h Get IN total length UINT Total number of IN bytes suppor-
12h Get OUT cyclic I/O length UINT Size of I/O Output area (in by-
14h Get OUT total length UINT Total number of OUT bytes sup-
UINT Module software version
ted
tes)
ported
53
Page 54

Objeto I/O Data Input Mapping, clase A0h
Descripción del
objeto
Funciones compatibles
Características
de la clase
El objeto Data Input Mapping se configura de forma dinámica mediante la aplicación y
se utiliza para acceder a los datos de E/S.
Las identificaciones de propiedades combinadas también están disponibles como propiedades de instancia específica (64h - 69h) en el objeto Assembly.
Funciones de la clase: Todas las características
Funciones de la instancia:
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
Name Type Value Description
Características individuales
Características
de la instancia
01h
# Ac-
cess
1 Get Data Array of USINT Mapped I/O data (also available in As-
2 Get Data Array of USINT Mapped I/O data (also available in As-
3 Get Data Array of USINT Mapped I/O data (also available in As-
4 Get Data Array of USINT Mapped I/O data (also available in As-
5 Get Data Array of USINT Mapped I/O data (also available in As-
6 Get Data Array of USINT Mapped I/O data (also available in As-
Name Type Description
sembly Instance 64h)
sembly Instance 65h)
sembly Instance 66h)
sembly Instance 67h)
sembly Instance 68h)
sembly Instance 69h)
54
Page 55

Objeto I/O Data Output Mapping, clase A1h
ES
Descripción del
objeto
Funciones compatibles
Características
de la clase
El objeto Data Output Mapping se configura de forma dinámica mediante la aplicación y
se utiliza para acceder a los datos de E/S.
Las identificaciones de propiedades combinadas también están disponibles como propiedades de instancia específica (96h - 9Bh) en el objeto Assembly.
Funciones de la clase: Todas las características
Funciones de la instancia:
Ajuste de las características individuales
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
Name Type Value Description
Características individuales
Características
de la instancia
01h
# Ac-
cess
1 Get/SetData Array of USINT Mapped I/O data (also available in As-
2 Get/SetData Array of USINT Mapped I/O data (also available in As-
3 Get/SetData Array of USINT Mapped I/O data (also available in As-
4 Get/SetData Array of USINT Mapped I/O data (also available in As-
5 Get/SetData Array of USINT Mapped I/O data (also available in As-
6 Get/SetData Array of USINT Mapped I/O data (also available in As-
Name Type Description
sembly Instance 96h)
sembly Instance 97h)
sembly Instance 98h)
sembly Instance 99h)
sembly Instance 9Ah)
sembly Instance 9Bh)
55
Page 56

Objeto Data Input Mapping, clase B0h
Descripción del
objeto
Funciones compatibles
Características
de la clase
Características
de la instancia
El objeto Parameter Data Input Mapping se configura de forma dinámica mediante la
aplicación y sirve para acceder de forma no cíclica a los datos de parámetros.
Funciones de la clase: Todas las características
Funciones de la instancia:
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
# Ac-
Name Type Value Description
Name Type Description
cess
Características individuales
01h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
02h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
02h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
02h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
02h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
02h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
... ... ... ... ...
32h Get Data Array of USINT Mapped block of Input Parameter Da-
ta
56
Page 57

Objeto Parameter Data Output Mapping, clase B1h
ES
Descripción del
objeto
Funciones compatibles
Características
de la clase
Características
de la instancia
01h
El objeto Parameter Data Output Mapping se configura de forma dinámica mediante la
aplicación y sirve para acceder de forma no cíclica a los datos de salida.
Funciones de la clase: Todas las características
Funciones de la instancia:
Ajuste de las características individuales
# Ac-
cess
1 Get Revision UINT 0001h Revisión 1
Cada característica pertenece a un bloque de datos de parámetros de salida. El tamaño
y el lugar de cada bloque deben especificarse a través de la aplicación.
# Access Name Type Description
Name Type Value Description
Características individuales
01h Get/Set Data Array of USINT Mapped block of Output Parameter Data
02h Get/Set Data Array of USINT Mapped block of Output Parameter Data
01h Get/Set Data Array of USINT Mapped block of Output Parameter Data
02h Get/Set Data Array of USINT Mapped block of Output Parameter Data
01h Get/Set Data Array of USINT Mapped block of Output Parameter Data
02h Get/Set Data Array of USINT Mapped block of Output Parameter Data
... ... ... ... ...
32h Get/Set Data Array of USINT Mapped block of Output Parameter Data
57
Page 58

Configurar la comunicación E/S entre AB
EtherNet/IP y ControlLogix5000
Crear SoftLogix5860 Controller
Abrir SoftLogix Chassis Monitor
1
Hacer clic en la columna 1 con el
2
botón derecho del ratón
Se mostrará "Select Module"
Seleccionar 1789-L60 SoftLogix5860
3
Controller y hacer clic en OK
Se mostrará "General"
Rellenar los datos y hacer clic en Si-
4
guiente
Se mostrará "NT System"
Rellenar los datos y hacer clic en Listo
5
Se mostrará "SoftLogix Chassis Monitor"
58
Page 59

Crear módulo
SoftLogix5800 EtherNet IP
Abrir SoftLogix Chassis Monitor
1
Hacer clic en la columna 1 con el
2
botón derecho del ratón
Se mostrará "Select Module"
Seleccionar 1789-L60 SoftLogix5860
3
Controller y hacer clic en OK
Se mostrará "General"
Rellenar los datos y hacer clic en Si-
4
guiente
ES
Configurar RSLogix5000
Se mostrará "NT System"
Rellenar los datos y hacer clic en Listo
5
Se mostrará "SoftLogix Chassis Monitor"
Abrir programa RSLogix5000:
1
Inicio/Programas/Rockwell Software/
RSLogix5000 Enterprise Series
Crear nuevos controladores:
2
Archivo/Nuevo/Controlador
59
Page 60

Se mostrará "New Controller"
Rellenar los datos y hacer clic en OK
3
Se mostrarán las características del controlador y la estructura de los datos:
- Controller
- Tasks
- Motion Groups
- Data Types
- I/O Configuration
60
En la carpeta "I/O Configuration", hacer clic con el botón derecho del ratón en Back-
4
plane, 1789-A17/AVirtual Chassis.
Seleccionar "New Module"
5
Se mostrará "Select Module"
Seleccionar EtherNet/IP SoftLogi-
6
x5800 EtherNet/IP y hacer clic en OK
Page 61

Se mostrará "Select Major Revision"
Introducir el valor para "Major Revi-
7
sion" y hacer clic en OK
Se mostrará "New Module"
Completar los datos, seleccionar
8
"Open Module Properties" y hacer clic
en OK
Se mostrará "Module Properties"
Rellenar o modificar los datos
9
Cambiar a la pestaña "RSNetWorx"
10
ES
Seleccionar "View and edit the Ether-
11
Net/IP" y hacer clic en OK
En Backplane, 1789-A17/A Virtual Chassis
se mostrará el nuevo módulo
Hacer clic en EtherNet con el botón derecho del ratón
12
Seleccionar "New Module"
13
61
Page 62
Se mostrará "Select Module"
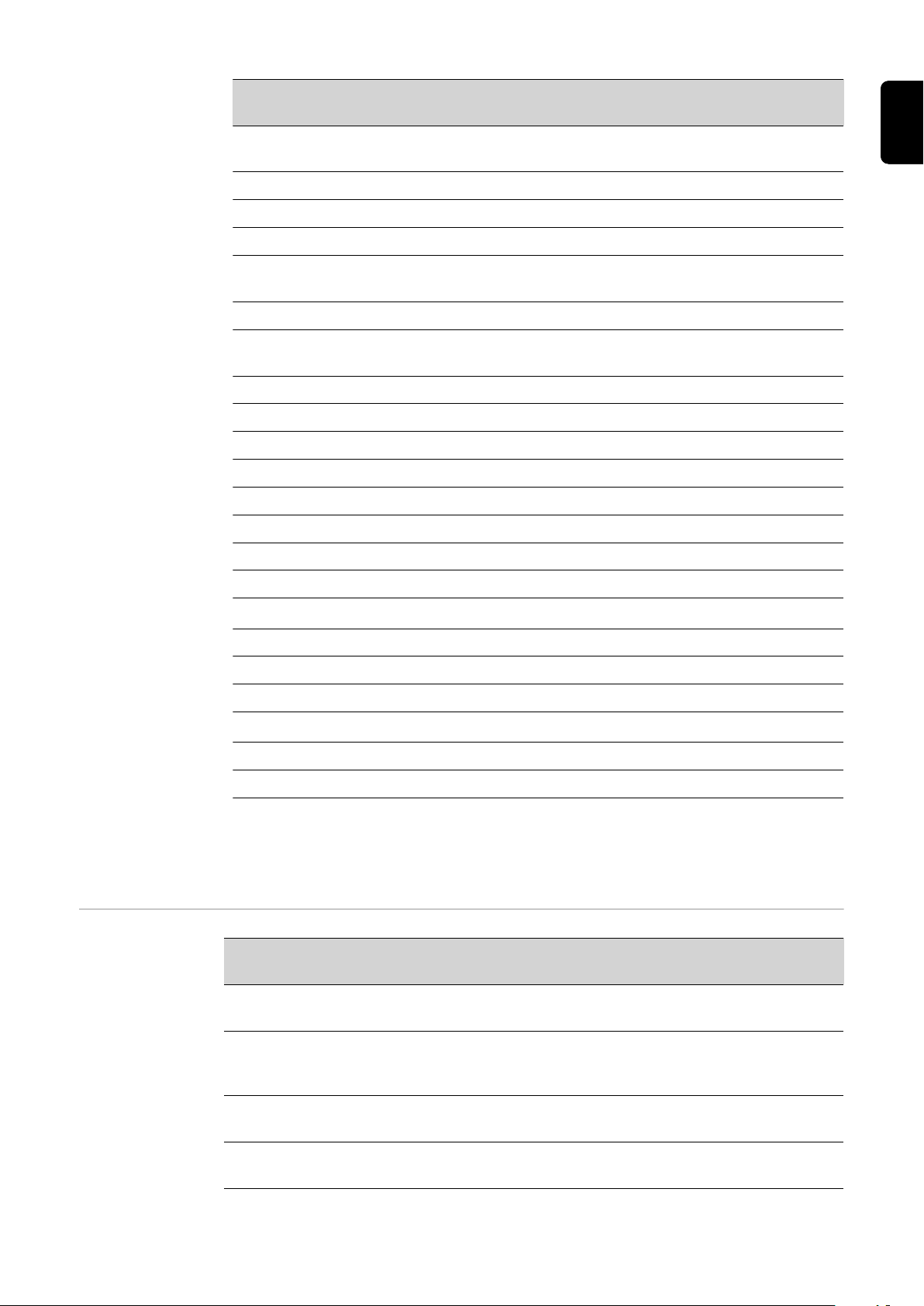
Seleccionar el módulo Ethernet ET-
14
HERNET-MODULE Generic y hacer
clic en OK
Se mostrará "New Module"
Completar los datos, seleccionar
15
"Open Module
Properties" y hacer clic en OK
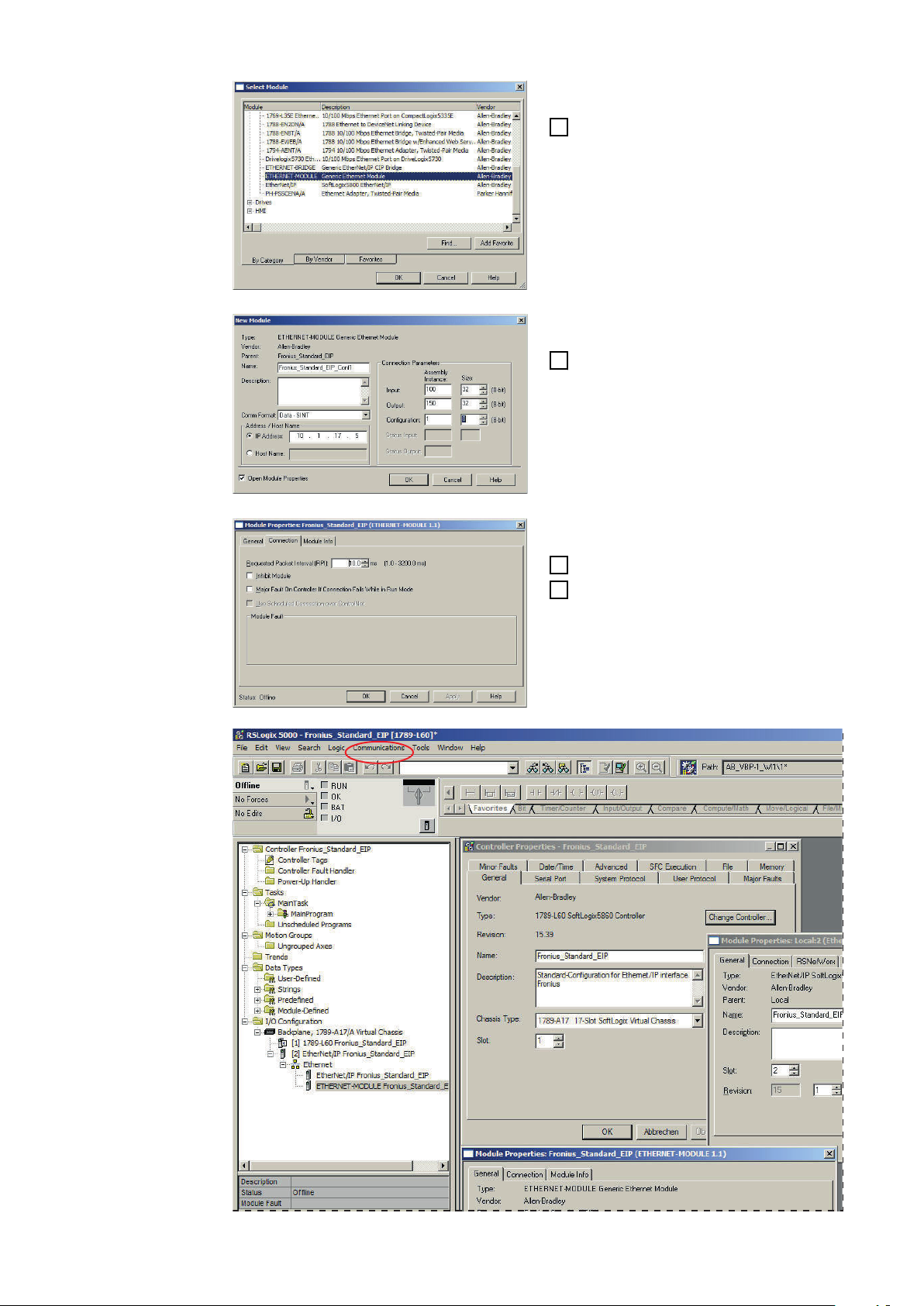
Se mostrará "Module Properties"
Cambiar a la pestaña "Connection"
16
Rellenar los datos y hacer clic en OK
17
62
Page 63

En la opción del menú "Communications", seleccionar "Go Online"
18
Se mostrará "Connected to go Online"
Hacer clic en "Download"
19
Se mostrará "Download"
Hacer clic en "Download"
20
La configuración se transmite a ControlLogix5000
ES
Tras cambiar al estado "en línea", en la carpeta "Controlador" están disponibles las etiquetas del controlador
63
Page 64

Modificar TAG
Comando Escribir
Comando leer
Establecer a 0 comando escribir E258 - TAG
1
Establecer dirección E265-280 TAG a 0xE001 (postflujo de gas)
2
- Low Byte 0x11
- High Byte 0xE0
Establecer dirección E281-296 TAG a 0x0898 - 2200 dec. (tiempo de flujo previo de
3
gas - 2,2 seg.)
- Low Byte 0x98
- High Byte 0x08
Establecer a 1 comando escribir E258-TAG
4
Establecer a 0 comando leer E257-TAG
1
Establecer dirección E265-280 TAG a 0xE001 (flujo previo de gas)
2
- Low Byte 0x11
- High Byte 0xE0
Establecer a 1 comando leer E257-TAG
3
Establecer a 1 comando escribir E258-TAG
4
- Low Byte 0x98
- High Byte 0x08
64
Page 65

目次
一般事項 67
安全 67
基本 67
装置のコンセプト 67
インターフェース接続 67
応用例 68
AB イーサネット / IP の接続と設定 69
安全 69
一般事項 69
Anybus S イーサネット / IP バスモジュールの接続、設定、および表示 69
AB イーサネット / IP インターフェイスの接続 70
RJ 45 イーサネット接続のピン割り当て 70
TCP / IP の設定 70
UBST 1 PC ボードのトラブルシューティング 71
UBST 1 PC ボード上の動作ステータス LED 71
「+5 V」LED(1) 71
「トラフィック 1~4」LED(2) 71
「L1~L7」LED(3) 72
「EXT」LED(4) 72
「EXT」ジャンパー(5)/「INT」ジャンパー(6) 72
「INT」LED(7) 73
「VCC」LED(8) 73
Anybus-S イーサネット / IP バスモジュールのトラブルシューティング 74
Anybus-S EtherNet / IP モジュールの LED インジケータ 74
LED 接続 / アクティビティ(1) 74
LED モジュールステータス(2) 74
LED ネットワークステータス(3) 74
LED アクティビティ(4) 75
Anybus-S ステータスインジケータ 75
データ転送の特性と技術データ 76
データ転送の特性 76
安全機能 76
AB EtherNet / IP の技術データ 76
AB EtherNet / IP 信号の説明 77
一般事項 77
溶接電源の操作モード 77
概要 77
MIG / MAG 標準パルスサイナジックおよび CMT の入力信号と出力信号 78
入力信号(ロボットから溶接電源へ) 78
出力信号(溶接電源からロボットへ) 81
TIG 溶接の入力信号と出力信号 84
入力信号(ロボットから溶接電源へ) 84
TIG 溶接パルス範囲設定 87
出力信号(溶接電源からロボットへ) 87
CC / CV の入力信号と出力信号 90
入力信号(ロボットから溶接電源へ) 90
出力信号(溶接電源からロボットへ) 92
標準マニュアルの入力信号と出力信号 96
入力信号(ロボットから溶接電源へ) 96
出力信号(溶接電源からロボットへ) 98
CIP オブジェクトの実行 102
CIP オブジェクトの実行 102
アイデンティティオブジェクト、クラス 01h 103
サポートされている機能 103
クラス属性 103
インスタンス属性 103
デバイスのステータス 104
リセット機能 104
メッセージルータ、クラス 02h 105
サポートされている機能 105
JA
65
Page 66

クラス属性 105
インスタンス属性 105
アセンブリオブジェクト、クラス 04h 106
オブジェクトの説明 106
サポートされている機能 106
クラス属性 106
インスタンス 03h の属性(ハートビート、入力専用) 106
インスタンス 04h の属性(ハートビート、リッスン専用) 106
インスタンス 05h の属性(設定データ) 106
インスタンス 64h~69h の属性(インスタンスの生成) 106
インスタンス 96h~9Bh の属性(インスタンスの消費) 107
接続マネージャ、クラス 06h 108
サポートされている機能 108
インスタンス属性 108
クラス 1 接続の詳細 108
クラス 1 接続 108
クラス 3 接続の詳細 109
ポートオブジェクト、クラス F4h 110
サポートされている機能 110
クラス属性 110
インスタンス 02h の属性 110
TCP / IP インターフェースオブジェクト、クラス F5h 111
オブジェクトの説明 111
サポートされている機能 111
クラス属性 111
インスタンス属性 111
イーサネットリンクオブジェクト、クラス F6h 113
オブジェクトの説明 113
サポートされている機能 113
クラス属性 113
インスタンス属性 113
診断オブジェクト、クラス AAh 114
オブジェクトの説明 114
サポートされている機能 114
クラス属性 114
インスタンス 01h の属性 114
I/O データ入力マッピングオブジェクト、クラス A0h 115
オブジェクトの説明 115
サポートされている機能 115
クラス属性 115
インスタンス 01h の属性 115
I/O データ出力マッピングオブジェクト、クラス A1h 116
オブジェクトの説明 116
サポートされている機能 116
クラス属性 116
インスタンス 01h の属性 116
パラメータデータ入力マッピングオブジェクト、クラス B0h 117
オブジェクトの説明 117
サポートされている機能 117
クラス属性 117
インスタンス属性 117
パラメータデータ出力マッピングオブジェクト、クラス B1h 118
オブジェクトの説明 118
サポートされている機能 118
クラス属性 118
インスタンス 01h の属性 118
AB イーサネット IP と ControlLogix5000 間の I/O 通信の確立 119
SoftLogix5860 コントローラの作成 119
SoftLogix5800 イーサネット / IP モジュールの作成 120
RSLogix5000 の設定 120
TAG の変更 125
コマンドの書き込み 125
コマンドの読み取り 125
66
Page 67

一般事項
(2)
(1)
(3) (4)
(1)
)5()1(
安全
誤操作、不適切な作業を行うと危険です。
人身傷害または製品に深刻なダメージが発生する可能性があります。
▶
▶
▶
基本 Anybus-S イーサネット / IP バスモジュール
Anybus-S イーサネット / IP バスモジュールは、完全な EtherNet / IP アダプタです。強力なイ
ーサネット / IP 接続のあらゆるアナログ・デジタルコンポーネントが含まれています。
一体型マイクロプロセッサは、イーサネット / IP バスプロトコルを自動的に処理し、自動装置
CPU プロトコル処理の役割を軽減します。
Anybus-S イーサネット / IP バスモジュールは、高データ処理能力と最高の信頼性をもって、大
量のデータを送信するために使われます。
Anybus-S イーサネット / IP バスモジュールは、10 メガビット / 秒と 100 メガビット / 秒の転送
速度に対応しています。
警告!
本書に記載されているすべての操作と機能は、技術トレーニングを受けた有資格者のみ
が実行してください。
この文書をすべて読み、理解してください。
この装置とすべてのシステム部品のすべての安全規則とユーザー文書を読み、理解してく
ださい。
JA
装置のコンセプト AB イーサネット / IP インタフェースには、ピギーバック Anybus-S イーサネット / IP バスモジュ
ールを備えた UBST 1 PC ボードが含まれています。イーサネット / IP 接続で必要なすべての
情報は、UBST 1 PC ボードの CFM に保存されています。
インターフェース接
続
(1) ブランキングカバー
(2) LocalNet 接続
連結ホースパックの接続用
(3) LocalNet 接続
他のシステム部品の接続用
(4) LocalNet 接続
他のシステム部品の接続用
(5) イーサネット RJ 45 接続
イーサネット IP データケーブルの接
続用
67
Page 68

応用例
(1) (2)
(3)
(4)
(5)
(6) (7)
(8)
(9)
(10)
(1) 溶接電源 (6) ロボット制御
(2) 冷却ユニット (7) 溶接ワイヤドラム
(3) AB イーサネット / IP (8) ロボット
(4) 連結ホースパック (9) 溶接トーチ
(5) イーサネット / IP データケーブル (10) ワイヤ供給速度
68
Page 69

AB イーサネット / IP の接続と設定
(1)
(2)
(3)
(4)
(5)
安全
警告!
誤操作、不適切な作業を行うと危険です。
人身傷害または製品に深刻なダメージが発生する可能性があります。
本書に記載されているすべての操作と機能は、技術トレーニングを受けた有資格者のみ
▶
が実行してください。
この文書をすべて読み、理解してください。
▶
この装置とすべてのシステム部品のすべての安全規則とユーザー文書を読み、理解してく
▶
ださい。
警告!
感電の危険があります。
人身傷害または製品に深刻なダメージが発生する可能性があります。
作業を始める前に、関係するすべての装置とコンポーネントの電源を切り、それらをグリッ
▶
ドから切り離してください。
関係するすべての装置とコンポーネントのスイッチが再度オンにならないように固定してく
▶
ださい。
装置を開いたら、適切な計測装置を使用して電荷を帯びた部品(コンデンサーなど)が放
▶
電されていることを確認します。
JA
一般事項 AB イーサネット / IP インターフェースは、Anybus-S
イーサネット / IP バスモジュールで接続され、設定されます。
Anybus S イーサ
ネット / IP バスモジ
ュールの接続、設
定、および表示
(1) UBST 1 PC ボードへのインターフェース
(2) イーサネット接続ソケット
(3) TCP / IP 設定スイッチ(使用されていません)
(4) LED インジケータ
(5) Anybus-S ステータスインジケータ
69
Page 70

AB イーサネット /
(1)
(3)
(2)
1 8
IP インターフェイス
の接続
注記
!
ロボットインタフェースが LocalNet に接続さ
れている間は、「2 ステップモード」が自動的
に選択されたままになります(表示:2 ステッ
プモード)。
「ロボットインターフェースのための特別 2 ス
テップモード」の詳細については、溶接電源の
操作手順をご参照ください。
LocalNet 接続に連結ホースパックの
1
LocalNet プラグを接続します(1)
イーサネット RJ 45 接続に、イーサネッ
2
ト / IP データケーブルを接続します
RJ 45 イーサネット
ピン 信号 備考
接続のピン割り当て
1 TD+ 2 TD- 3 RD+ 4 - 通常は使用されません。信号の健全性を確保するために、こ
5 -
れらのピンは相互に接続され、接地導体(PE)のフィルタ回路
を介して終端となっています。
6 RD- 7 - 通常は使用されません。信号の健全性を確保するために、こ
8 -
れらのピンは相互に接続され、接地導体(PE)のフィルタ回路
を介して終端となっています。
TCP / IP の設定 Anybus-S EtherNet / IP バスモジュールの設定は、次のイーサネットゲートを介して実行され
ます。
- スタート / プログラム / Fronius 製品グループ / サービスモジュール
- イーサネットゲートを選択します(番号:xxxxxxxx)
- 設定ボタンをクリックします
70
Page 71

UBST 1 PC ボードのトラブルシューティング
(2)
(3)
(1)
(8)
(4)
(7)
(5)
(6)
UBST 1 PC ボード
上の動作ステータス
LED
JA
(1) 「+5 V」LED (5) 「EXT」ジャンパー
(2) 「トラフィック 1~4」LED (6) 「INT」ジャンパー
(3) 「L1~L7」LED (7) 「INT」LED
(4) 「EXT」LED (8) 「VCC」LED
「+5 V」LED(1) 「+5 V」LED(1)は、内部または外部の電源電圧が接続されているときに点灯します。「+5 V」
「トラフィック 1~4」
LED(2)
LED は、PC ボードのエレクトロニクスが OK であることを示します。
LED インジケータ 意味 対策
トラフィックXオフまたはオン Fronius LocalNet 上での
通信なし
トラフィックX点滅 Fronius LocalNet 上での
通信あり
電源電圧を確認してくだ
さい。ケーブルを確認し
てください
-
71
Page 72
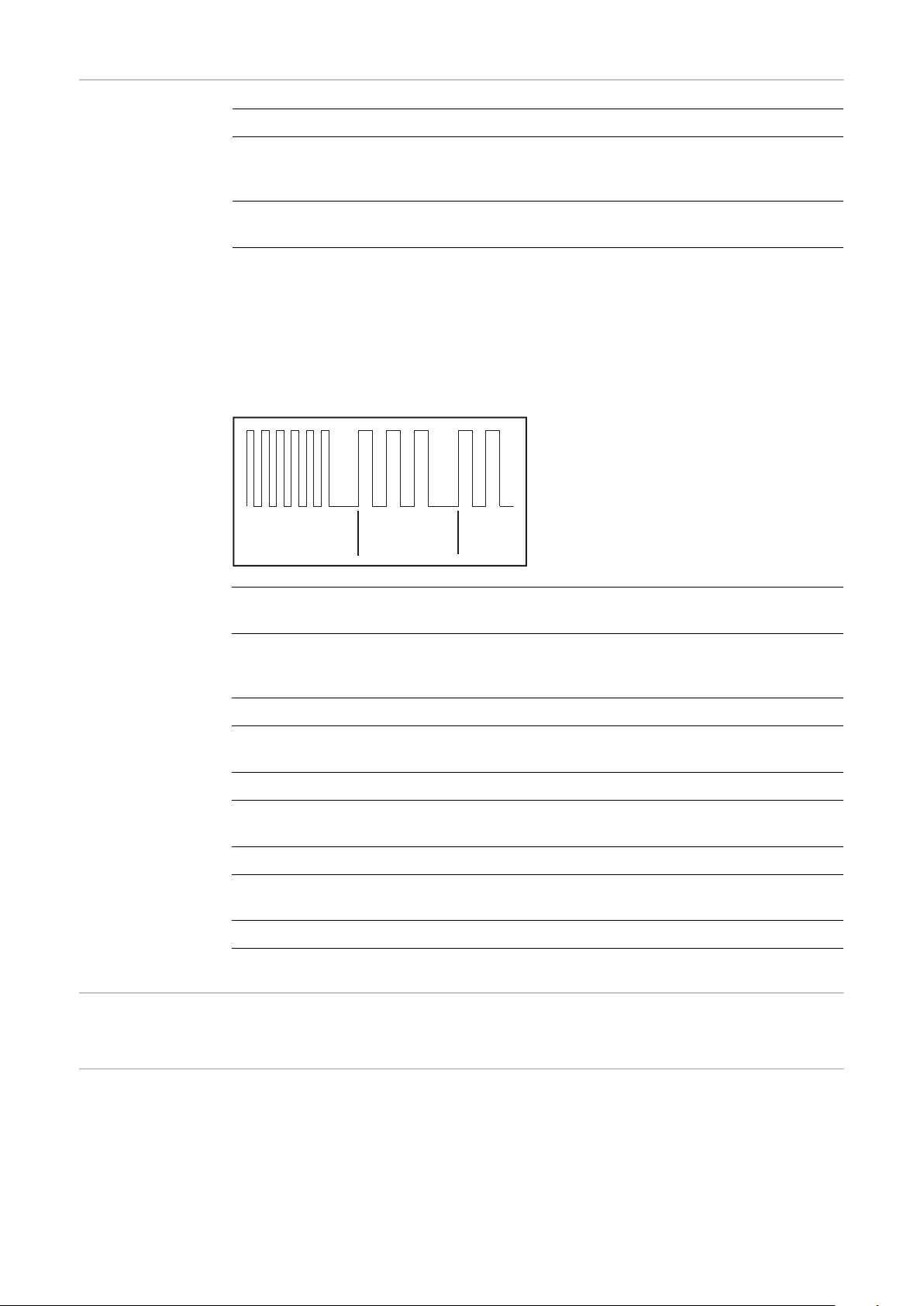
「L1~L7」LED(3)
(a) (b) (c)
LED インジケータ 意味 対策
L1 オン / 点滅 モジュールでエラーが発生
しました
テーブル / アフターサー
ビスのエラー番号を参
照してください
L2 オン Fronius LocalNet 上での
-
通信あり
「L1」LED オン:
溶接電源上のエラーの説明と、それに対応している表示は、「ロボットインターフェース」リーフ
レット(42,0410,0616)
「ロボットへの信号出力」章、「エラー番号 UBST」セクションに記載されています。
「L1」LED フラッシング - エラーは点滅コードで示されます。
(a) 急速点滅:
エラーコードの開始
(b) 第一の低速パルス:エラーのタイプ
(c) 第二の低速パルス:
エラー位置
エラーコード引数にエラーが
障害の説明 対策
発生しました
1 1 最大イーサネット枠サイズを超過
しました
インターフェースをオフ
にしてから再度オンに
してください
2 不正なメールボックスのタイプ 4 ポート 15000 上の UDP データの
-
アンダーフロー
5 UDP データのオーバーフロー 6 ポート 15001 上の UDP データの
-
アンダーフロー
7 不正な UDP ポート 8 スタックの初期化中にエラーが発
-
生しました
9 無効な機能 -
「EXT」LED(4) LED「EXT」(4)は、「EXT」ジャンパー(5)を使用して外部電源電圧が選択されると点灯します。
「EXT」ジャンパー
(5)/「INT」ジャンパ
「EXT」(5)および「INT」(6)ジャンパーは、内部電源と外部電源のどちらかを選択するためのも
のです。ジャンパーの出荷時の設定は「外部電源」になっています。
ー(6)
72
Page 73

「INT」LED(7) 「INT」LED(7)は、「INT」ジャンパー(6)を使用して内部電源電圧が選択されると点灯します。
「VCC」LED(8) 「VCC」LED(8)は、内部または外部の電源電圧が接続されているときに点灯します。「VCC」
LED は、LocalNet 側のモジュールのアウトバウンド + 24 V 電源が OK であることを示しま
す。
JA
73
Page 74

Anybus-S イーサネット / IP バスモジュールのトラブルシュ
(2)
(4)
(1)
(3)
ーティング
Anybus-S
EtherNet / IP モジ
ュールの LED イン
ジケータ
LED 接続 / アクティ
ビティ(1)
(1) 接続 / アクティビティ
(2) モジュールステータス
(3) ネットワークステータス
(4) アクティビティ
インジケータ 意味
緑色に点灯 接続呼び掛け済み
オフ 接続未呼び掛け
LED モジュールス
テータス(2)
LED ネットワークス
テータス(3)
インジケータ 意味
緑色に点灯 動作時のスキャナ監視
緑色に点滅 未設定またはスキャナがアイドル状態
赤色に点滅 マイナーな修正可能なエラーが検出されました
赤色に点灯 致命的なエラーが検出されました
緑色 / 赤色に点滅 セルフテスト実行中
オフ 電源なし
インジケータ 意味
緑色に点灯 オンライン、利用可能な接続が一つ以上あり(CIP カテゴリ 1 または
3)
緑色に点滅 オンライン、利用可能な接続なし
赤色に点灯 重複 IP アドレス検出、内部エラー(致命的なエラー)
赤色に点滅 一つ以上の接続にてタイムアウト(CIP カテゴリ 1 または 3)
緑色 / 赤色に点滅 セルフテスト実行中
オフ 電源、または IP アドレスなし
74
Page 75

LED アクティビティ
(4)
インジケータ 意味
緑色に点滅 各点滅は、イーサネットデータパケットの受信または送信に対応して
います
JA
Anybus-S ステータ
スインジケータ
Anybus-S ステータスインジケータは、
Anybus-S Interbus 光ファイバーバスモジュ
ールの表面の LED です。エラーとステータス
は、以下の Anybus-S のステータスインジケ
ータによって表示されます。
ステータスインジケータが赤く点灯している場
合
内部エラーまたはブートローダモードの操作
ステータスインジケータが赤色で点滅してい
る場合、1 Hz
RAM コンフィギュレーションメモリでエラーが
発生
ステータスインジケータが赤色で点滅してい
る場合、2 Hz
ASIC または FLASH でエラーが発生
ステータスインジケータが赤色で点滅してい
る場合、4 Hz
DPRAM でエラーが発生
ステータスインジケータが緑色で点滅してい
る場合、2 Hz
バスモジュールが初期化されていません
ステータスインジケータが緑色で点滅してい
る場合、1 Hz
バスモジュールが初期化されました、
通常動作
75
Page 76

データ転送の特性と技術データ
データ転送の特性
安全機能 データ伝送がない場合、すべての入力と出力はリセットされ、溶接電源が「停止」モードになりま
AB EtherNet / IP
の技術データ
伝送技術 イーサネット
ネットワークトポロジー 星
中間 ツイストペアケーブル
伝送速度 10 または 100 メガビット / 秒
バス接続 イーサネット RJ 45
プロセスデータ幅 296 ビット(標準設定)
プロセスデータ形式 インテル
す。データ伝送が再確立されてから、次の信号によって処理が再開されます。
- 「ロボット準備完了」信号
- 「ソースエラーリセット」信号
電源 内部
設置位置 以下の溶接電源の背面: TS 4000 / 5000
TPS 3200 / 4000 /
5000
保護等級 IP23
設定インターフェース フィールドバス設定モジュールを介して
76
Page 77

AB EtherNet / IP 信号の説明
一般事項 選択されたモードに応じて、AB EtherNet / IP インターフェースは様々な入力および出力信号
を伝送できます。
JA
溶接電源の操作モ
ード
概要 「AB EtherNet / IP 信号の説明」の章には、次のセクションが含まれます:
操作モード E05 E04 E03
MIG / MAG 溶接用標準サイナジック 0 0 0
MIG / MAG パルスサイナジック 0 0 1
ジョブモード 0 1 0
内部パラメータの選択 0 1 1
MIG / MAG 溶接用標準手溶接 1 0 0
CC / CV 1 0 1
TIG 溶接 1 1 0
CMT / 特殊プロセス 1 1 1
- MIG / MAG 標準 / パルスサイナジックおよび CMT の入力信号と出力信号
- TIG 溶接の入力信号と出力信号
- CC / CV の入力信号と出力信号
- 標準マニュアルの入力信号と出力信号
77
Page 78

MIG / MAG 標準パルスサイナジックおよび CMT の入力
信号と出力信号
入力信号(ロボット
から溶接電源へ)
シーケンス番号信号の指定 範囲 アクティビ
ティ
E01 溶接開始 - 高
E02 ロボット準備完了 - 高
E03 操作モード ビット 0 - 高
E04 操作モード ビット 1 - 高
E05 操作モード ビット 2 - 高
E06 マスター選択ツイン - 高
E07 使用されていません - E08 使用されていません - -
E09 ガステスト - 高
E10 ワイヤ前進 - 高
E11 ワイヤ後退 - 高
E12 ソースエラーリセット - 高
E13 タッチセンシング - 高
E14 トーチ消灯 - 高
E15 使用されていません - E16 使用されていません - -
E17~E24 ジョブ番号 0~99 -
E25~E31 プログラム番号 0~127 E32 溶接シミュレーション - 高
出力設定値 0~65535(0~100 %) E33~E40 下位バイト - E41~E48 上位バイト - -
アーク長補正、設定値 0~65535(-30~+30
%)
E49~E56 下位バイト - E57~E64 上位バイト - -
E65~E72
パルスまたは動的補正
設定値
1)
0~255(-5~+5 %) -
-
78
Page 79

シーケンス番号信号の指定 範囲 アクティビ
ティ
E73~E80 使用されていません - -
E81~E88 バーンバック設定値 0~255(-200~+200 ミ
-
リ秒)
E89~E96 使用されていません - E97~E104 下位バイト - E105~E112 上位バイト - -
E113 シンクロパルス無効 - 高
E114 SFI 無効 - 高
E115
パルスまたは動的補正
1)
- 高
無効
E116 バーンバック無効 - 高
E117 全電源範囲(0~30 メートル) - 高
E118~E120 使用されていません - -
E121 ROB I/O 出力 1 - 高
E122 ROB I/O 出力 2 - 高
JA
E123~E128 使用されていません - -
E129~E136 部品番号、タイプ 1 ASCII 32~254 -
E137~E144 部品番号、タイプ 2 ASCII 32~254 -
E145~E152 部品番号、タイプ 3 ASCII 32~254 -
E153~E160 部品番号、タイプ 4 ASCII 32~254 -
E161~E168 部品番号、タイプ 5 ASCII 32~254 -
E169~E176 部品番号、タイプ 6 ASCII 32~254 -
E177~E184 部品番号、タイプ 7 ASCII 32~254 -
E185~E192 部品番号、タイプ 8 ASCII 32~254 -
E193~E200 部品番号、タイプ 9 ASCII 32~254 -
79
Page 80

シーケンス番号信号の指定 範囲 アクティビ
ティ
E201~E208 部品番号、タイプ 10 ASCII 32~254 -
E209~E216 部品番号、タイプ 11 ASCII 32~254 -
外部ワイヤ送給装置
0~65535 -
、ワイヤ供給速度実行値
E217~E224 下位バイト - E225~E232 上位バイト - -
E233~E240 外部ワイヤ送給装置
0~255 -
、グリッドエラー
E241~E248 外部ワイヤ送給装置
0~255 -
、二次エラー
E249 外部ワイヤ送給装置有効 - 高
E250~E256 使用されていません - -
E257 TAG コマンドの読み取り - SF
E258 TAG コマンドの書き込み - SF
E259~E264 使用されていません - -
TAG アドレス -
2)
E265~E272 下位バイト - E273~E280 上位バイト - TAG 値 -
2)
E281~E288 下位バイト - E289~E296 上位バイト - -
1)
異なるパラメータは、選択したプロセスおよび溶接プログラムに応じて指定されます。
溶接プロセス 溶接パラメータ
パルス パルス補正
スタンダード 動的補正
CMT ホットスタート時間
パルス補正
ホットスタートパルスサイクル
ブースト補正
動的補正
2)
タグテーブル参照
80
SF 立ち上がりエッジ
Page 81

出力信号(溶接電源
からロボットへ)
シーケンス番号信号の指定 範囲 アクティビ
ティ
A01 アーク安定 - 高
A02 リミット信号
(RCU 5000i の場合のみ)
A03 プロセスアクティブ - 高
A04 グリッド電流信号 - 高
A05 トーチ衝突保護 - 高
A06 溶接電源準備完了 - 高
A07 通信準備完了 - 高
A08 ライフサイクルトグルビット 250 ミリ秒毎 -
A09~A16 エラー番号 0~255 -
A17~A24 使用されていません - -
A25 ワイヤスティックコントロール - 高
A26 使用されていません - A27 ロボットアクセス
(RCU 5000i の場合のみ)
A28 ワイヤ利用可能 - 高
- 高
- 高
JA
A29 短絡タイムアウト - 高
A30 データドキュメント準備完了
(RCU 5000i の場合のみ)
A31 使用されていません - A32 出力範囲外 - 高
溶接電圧実行値 0~65535(0~100 V) A33~A40 下位バイト - A41~A48 上位バイト - -
溶接電流実行値 0~65535(0~1000 A) A49~A56 下位バイト - A57~A64 上位バイト - -
A65~A72 モータ電流実行値 0~255(0~5 A) -
A73~A80 使用されていません - -
- 高
A81~A88 使用されていません - -
A89~A96 使用されていません - -
81
Page 82

シーケンス番号信号の指定 範囲 アクティビ
ティ
ワイヤ供給速度 0~65535
(-327.68~+327.67 メ
ートル / 分)
A97~A104 下位バイト - A105~A112 上位バイト - -
A113~A120 使用されていません - -
A121 ROB I/O 入力 1 - 高
A122 ROB I/O 入力 2 - 高
A123 ROB I/O 入力 3 - 高
A124 ROB I/O 入力 4 - 高
A125~A128 使用されていません - -
A129 上部ワイヤ供給速度制限 - 高
A130 下部ワイヤ供給速度制限 - 高
A131 上部電流制限 - 高
A132 下部電流制限 - 高
A133 上部電圧制限 - 高
-
A134 下部電圧制限 - 高
A135 メインモータの制限を超過しました - 高
A136 プッシュプルモータの制限を超過
しました
A137 溶接速度の制限を超過しました - 高
A138 溶接速度の制限に達していません- 高
A139~A144 使用されていません - -
A145~A152 使用されていません - A153~A160 使用されていません - A161~A168 使用されていません - A169~A176 使用されていません - A177~A184 使用されていません - A185~A192 使用されていません - A193~A200 使用されていません - A201~A208 使用されていません - A209~A216 使用されていません - -
- 高
82
外部ワイヤ送給装置
、ワイヤ供給速度設定値
A217~A224 下位バイト - A225~A232 上位バイト - -
0~65535
(-327.68~+327.67 メ
ートル / 分)
-
Page 83

シーケンス番号信号の指定 範囲 アクティビ
ティ
外部ワイヤ送給装置
、ワイヤ供給速度スロープ
0 x 3A98
(15 メートル / 分 / 秒)
-
A233~A240 下位バイト - A241~A248 上位バイト - -
A249~A256 使用されていません - -
A257 TAG ステータスの読み取り - 高
A258 TAG ステータスの書き込み - 高
A259~A264 使用されていません - -
TAG アドレス -
2)
A265~A272 下位バイト - A273~A280 上位バイト - -
TAG 値 -
2)
A281~A288 下位バイト - A289~A296 上位バイト - -
JA
2)
タグテーブル参照
83
Page 84
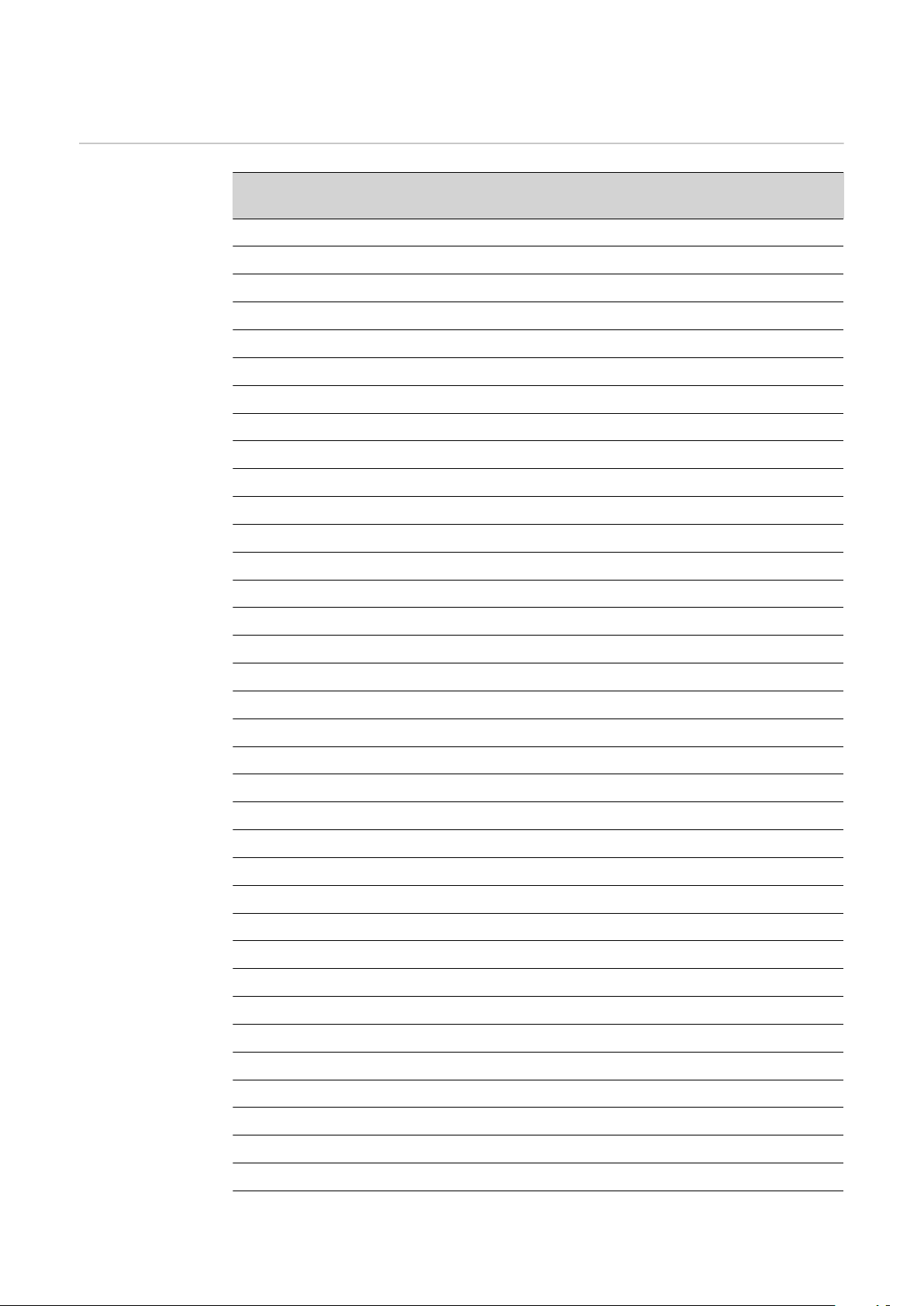
TIG 溶接の入力信号と出力信号
入力信号(ロボット
から溶接電源へ)
シーケンス番号信号の指定 範囲 アクティビ
ティ
E01 溶接開始 - 高
E02 ロボット準備完了 - 高
E03 操作モード ビット 0 - 高
E04 操作モード ビット 1 - 高
E05 操作モード ビット 2 - 高
E06 使用されていません - E07 使用されていません - E08 使用されていません - -
E09 ガステスト - 高
E10 ワイヤ前進 - 高
E11 ワイヤ後退 - 高
E12 ソースエラーリセット - 高
E13 タッチセンシング - 高
E14 冷線無効 - 高
E15 使用されていません - E16 使用されていません - -
E17~E24 ジョブ番号 0~99 -
E25 DC / AC - 高
E26 DC- / DC+ - 高
E27 キャップ状 - 高
E28 パルス無効 - 高
E29 パルス範囲 ビット 0 - 高
E30 パルス範囲 ビット 1 - 高
E31 パルス範囲 ビット 2 - 高
E32 溶接シミュレーション - 高
グリッド電流設定値 0~65535(0~最大) E33~E40 下位バイト - E41~E48 上位バイト - -
84
外部パラメータ、設定値 0~65535 E49~E56 下位バイト - -
Page 85

シーケンス番号信号の指定 範囲 アクティビ
ティ
E57~E64 上位バイト - -
E65~E72 ベース電流設定値 0~255(0~100 %) -
E73~E80 使用されていません - -
E81~E88 デューティー・サイクル設定値 0~255(10~90 %) E89~E96 使用されていません - -
JA
ワイヤ供給速度設定値、
Fd.1
E97~E104 下位バイト - E105~E112 上位バイト - -
E113 使用されていません - E114 使用されていません - E115 接地電流無効 - 高
E116 デューティー・サイクル無効 - 高
E117~E120 使用されていません - -
E121 ROB I/O 出力 1 - 高
E122 ROB I/O 出力 2 - 高
E123~E128 使用されていません - -
E129~E136 部品番号、タイプ 1 ASCII 32~254 -
0~65535
(-327.67~+327.67 メ
ートル / 分)
-
E137~E144 部品番号、タイプ 2 ASCII 32~254 -
E145~E152 部品番号、タイプ 3 ASCII 32~254 -
E153~E160 部品番号、タイプ 4 ASCII 32~254 -
E161~E168 部品番号、タイプ 5 ASCII 32~254 -
E169~E176 部品番号、タイプ 6 ASCII 32~254 -
E177~E184 部品番号、タイプ 7 ASCII 32~254 -
85
Page 86

シーケンス番号信号の指定 範囲 アクティビ
ティ
E185~E192 部品番号、タイプ 8 ASCII 32~254 -
E193~E200 部品番号、タイプ 9 ASCII 32~254 -
E201~E208 部品番号、タイプ 10 ASCII 32~254 -
E209~E216 部品番号、タイプ 11 ASCII 32~254 -
外部ワイヤ送給装置
0~65535 -
、ワイヤ供給速度実行値
E217~E224 下位バイト - E225~E232 上位バイト - -
E233~E240 外部ワイヤ送給装置
0~255 -
、グリッドエラー
E241~E248 外部ワイヤ送給装置
0~255 -
、二次エラー
E249 外部ワイヤ送給装置有効 - 高
E250~E256 使用されていません - -
E257 TAG コマンドの読み取り - SF
E258 TAG コマンドの書き込み - SF
E259~264 使用されていません - -
TAG アドレス -
2)
86
E265~272 下位バイト - E273~280 上位バイト - -
TAG 値 -
E281~288 下位バイト - E289~296 上位バイト - -
2)
タグテーブル参照
立ち上がりエッジ
SF
2)
Page 87

TIG 溶接パルス範
囲設定
範囲選択 E31 E30 E29
溶接電源のパルス範囲の設定 0 0 0
パルス設定範囲無効 0 0 1
出力信号(溶接電源
からロボットへ)
0.2~2 Hz 0 1 0
2~20 Hz 0 1 1
20~200 Hz 1 0 0
200~2000 Hz 1 0 1
シーケンス番号信号の指定 範囲 アクティビ
ティ
A01 アーク安定 - 高
A02 使用されていません - A03 プロセスアクティブ - 高
A04 グリッド電流信号 - 高
A05 トーチ衝突保護 - 高
A06 溶接電源準備完了 - 高
A07 通信準備完了 - 高
A08 ライフサイクルトグルビット 250 ミリ秒毎 -
JA
A09~A16 エラー番号 0~255 -
A17~A24 使用されていません - -
A25 使用されていません - A26 高周波有効 - 高
A27 使用されていません - A28 ワイヤ利用可能(冷線) - 高
A29 使用されていません - A30 使用されていません - A31 パルス高 - 高
A32 使用されていません - -
溶接電圧実行値 0~65535(0~100 V) A33~A40 下位バイト - A41~A48 上位バイト - -
溶接電流実行値 0~65535(0~1000 A) A49~A56 下位バイト - A57~A64 上位バイト - -
87
Page 88

シーケンス番号信号の指定 範囲 アクティビ
ティ
A65~A72 モータ電流実行値(冷線) 0~255(0~5 A) -
A73~A80 使用されていません - -
A81~A88 アーク長実行値(AVC) 0~255(0~50 V) -
A89~A96 使用されていません - -
ワイヤ供給速度実行値
(冷線)
A97~A104 上位バイト - A105~A112 下位バイト - -
A113~A120 使用されていません - -
A121 ROB I/O 入力 1 - 高
A122 ROB I/O 入力 2 - 高
A123 ROB I/O 入力 3 - 高
A124 ROB I/O 入力 4 - 高
A125~A128 使用されていません - -
A129~A136 使用されていません - A137~A144 使用されていません - A145~A152 使用されていません - A153~A160 使用されていません - A161~A168 使用されていません - -
0~65535
(-327.68~+327.68 メ
ートル / 分)
-
88
A169~A176 使用されていません - A177~A184 使用されていません - A185~A192 使用されていません - A193~A200 使用されていません - A201~A208 使用されていません - A209~A216 使用されていません - -
外部ワイヤ送給装置
、ワイヤ供給速度設定値
A217~A224 下位バイト - A225~A232 上位バイト - -
外部ワイヤ送給装置
、ワイヤ供給速度スロープ
A233~A240 下位バイト - -
0~65535
(-327.68~+327.67 メ
ートル / 分)
0 x 3A98
(15 メートル / 分 / 秒)
-
-
Page 89

シーケンス番号信号の指定 範囲 アクティビ
ティ
A241~A248 上位バイト - -
A249~A256 使用されていません - -
A257 TAG ステータスの読み取り - 高
A258 TAG ステータスの書き込み - 高
A259~A264 使用されていません - -
TAG アドレス -
A265~A272 下位バイト - A273~A280 上位バイト - -
TAG 値 -
A281~A288 下位バイト - A289~A296 上位バイト - -
2)
タグテーブル参照
JA
2)
2)
89
Page 90
CC / CV の入力信号と出力信号
入力信号(ロボット
から溶接電源へ)
シーケンス番号信号の指定 範囲 アクティビ
ティ
E01 溶接開始 - 高
E02 ロボット準備完了 - 高
E03 操作モード ビット 0 - 高
E04 操作モード ビット 1 - 高
E05 操作モード ビット 2 - 高
E06 マスター選択ツイン - 高
E07 使用されていません - E08 使用されていません - -
E09 ガステスト - 高
E10 ワイヤ前進 - 高
E11 ワイヤ後退 - 高
E12 ソースエラーリセット - 高
E13 タッチセンシング - 高
E14 ブロー溶接トーチクリア - 高
E15 使用されていません - E16 使用されていません - -
E17~E24 ジョブ番号 0~99 -
E25~E31 使用されていません - E32 溶接シミュレーション - 高
溶接電流指令値 0~65535(0~最大) E33~E40 下位バイト - E41~E48 上位バイト - -
ワイヤ供給速度 0~65535
(-327.67~+327.67 メ
ートル / 分)
E49~E56 下位バイト - E57~E64 上位バイト - -
-
90
E65~E72 溶接電圧 0~255(0~U
E73~E80 使用されていません - -
) -
max
Page 91

シーケンス番号信号の指定 範囲 アクティビ
ティ
E81~E88 使用されていません - -
E89~E96 使用されていません - -
使用されていません - E97~E104 下位バイト - E105~E112 上位バイト - -
E113~E120 使用されていません - -
E121 ROB I/O 出力 1 - 高
E122 ROB I/O 出力 2 - 高
E123~E128 使用されていません - -
JA
E129~E136 部品番号、タイプ 1 ASCII 32~254 -
E137~E144 部品番号、タイプ 2 ASCII 32~254 -
E145~E152 部品番号、タイプ 3 ASCII 32~254 -
E153~E160 部品番号、タイプ 4 ASCII 32~254 -
E161~E168 部品番号、タイプ 5 ASCII 32~254 -
E169~E176 部品番号、タイプ 6 ASCII 32~254 -
E177~E184 部品番号、タイプ 7 ASCII 32~254 -
E185~E192 部品番号、タイプ 8 ASCII 32~254 -
E193~E200 部品番号、タイプ 9 ASCII 32~254 -
E201~E208 部品番号、タイプ 10 ASCII 32~254 -
E209~E216 部品番号、タイプ 11 ASCII 32~254 -
外部ワイヤ送給装置
、ワイヤ供給速度実行値
0~65535 -
91
Page 92

シーケンス番号信号の指定 範囲 アクティビ
ティ
E217~E224 下位バイト - E225~E232 上位バイト - -
E233~E240 外部ワイヤ送給装置
0~255 -
、グリッドエラー
E241~E248 外部ワイヤ送給装置
0~255 -
、二次エラー
E249 外部ワイヤ送給装置有効 - 高
E250~E256 使用されていません - -
E257 TAG コマンドの読み取り - SF
E258 TAG コマンドの書き込み - SF
E259~264 使用されていません - -
TAG アドレス -
2)
E265~272 下位バイト - E273~280 上位バイト - -
TAG 値 -
2)
出力信号(溶接電源
からロボットへ)
E281~288 下位バイト - E289~296 上位バイト - -
2)
タグテーブル参照
立ち上がりエッジ
SF
シーケンス番号信号の指定 範囲 アクティビ
ティ
A01 アーク安定 - 高
A02 リミット信号
- 高
(RCU 5000i の場合のみ)
A03 プロセスアクティブ - 高
A04 グリッド電流信号 - 高
A05 トーチ衝突保護 - 高
A06 溶接電源準備完了 - 高
A07 通信準備完了 - 高
92
A08 ライフサイクルトグルビット 250 ミリ秒毎 -
Page 93

シーケンス番号信号の指定 範囲 アクティビ
ティ
A09~A16 エラー番号 0~255 -
A17~A24 使用されていません - -
A25 ワイヤスティックコントロール - 高
A26 使用されていません - A27 ロボットアクセス
(RCU 5000i の場合のみ)
A28 ワイヤ利用可能 - 高
A29 短絡タイムアウト - 高
A30 データドキュメント準備完了
(RCU 5000i の場合のみ)
A31 使用されていません - A32 出力範囲外 - 高
溶接電圧実行値 0~65535(0~100 V) A33~A40 下位バイト - A41~A48 上位バイト - -
溶接電流実行値 0~65535(0~1000 A) A49~A56 下位バイト - -
- 高
- 高
JA
A57~A64 上位バイト - -
A65~A72 モータ電流実行値 0~255(0~5 A) -
A73~A80 使用されていません - -
A81~A88 使用されていません - -
A89~A96 使用されていません - -
ワイヤ供給速度 0~65535
(-327.68~+327.68 メ
ートル / 分)
A97~A104 下位バイト - A105~A112 上位バイト - -
A113~A120 使用されていません - -
A121 ROB I/O 入力 1 - 高
-
A122 ROB I/O 入力 2 - 高
A123 ROB I/O 入力 3 - 高
A124 ROB I/O 入力 4 - 高
93
Page 94

シーケンス番号信号の指定 範囲 アクティビ
ティ
A125~A128 使用されていません - -
A129 上部ワイヤ供給速度制限 - 高
A130 下部ワイヤ供給速度制限 - 高
A131 上部電流制限 - 高
A132 下部電流制限 - 高
A133 上部電圧制限 - 高
A134 下部電圧制限 - 高
A135 ワイヤ送給装置モータ電流 - 高
A136 プッシュプルユニットモータ電流 - 高
A137 上部溶接速度制限 - 高
A138 下部溶接速度制限 - 高
A139~A144 使用されていません - A145~A152 使用されていません - A153~A160 使用されていません - A161~A168 使用されていません - A169~A176 使用されていません - A177~A184 使用されていません - A185~A192 使用されていません - A193~A200 使用されていません - A201~A208 使用されていません - A209~A216 使用されていません - -
外部ワイヤ送給装置
、ワイヤ供給速度設定値
A217~A224 下位バイト - A225~A232 上位バイト - -
外部ワイヤ送給装置
、ワイヤ供給速度スロープ
A233~A240 下位バイト - A241~A248 上位バイト - -
0~65535
(-327.68~+327.67 メ
ートル / 分)
0 x 3A98
(15 メートル / 分 / 秒)
-
94
A249~A256 使用されていません - -
A257 TAG ステータスの読み取り 高
A258 TAG ステータスの書き込み - 高
A259~A264 使用されていません - -
Page 95
シーケンス番号信号の指定 範囲 アクティビ
ティ
TAG アドレス -
2)
A265~A272 下位バイト - A273~A280 上位バイト - -
TAG 値 -
2)
A281~A288 下位バイト - A289~A296 上位バイト - -
2)
タグテーブル参照
JA
95
Page 96

標準マニュアルの入力信号と出力信号
入力信号(ロボット
から溶接電源へ)
シーケンス番号信号の指定 範囲 アクティビ
ティ
E01 溶接開始 - 高
E02 ロボット準備完了 - 高
E03 操作モード ビット 0 - 高
E04 操作モード ビット 1 - 高
E05 操作モード ビット 2 - 高
E06 マスター選択ツイン - 高
E07 使用されていません - E08 使用されていません - -
E09 ガステスト - 高
E10 ワイヤ前進 - 高
E11 ワイヤ後退 - 高
E12 ソースエラーリセット - 高
E13 タッチセンシング - 高
E14 ブロー溶接トーチクリア - 高
E15 使用されていません - E16 使用されていません - -
E17~E24 使用されていません - -
E25~E31 プログラム番号 0~127 E32 溶接シミュレーション - 高
ワイヤ供給速度 0~65535(0~最大)
(-327.67~+327.67 メ
ートル / 分)
E33~E40 下位バイト - E41~E48 上位バイト - -
溶接電圧 0~65535(0~U
E49~E56 下位バイト - E57~E64 上位バイト - -
max
-
) -
96
E65~E72 動的補正 0~255(-5~+5 %) -
E73~E80 使用されていません - -
Page 97
シーケンス番号信号の指定 範囲 アクティビ
ティ
E81~E88 バーンバック設定値 0~255(-200~+200 ミ
リ秒)
E89~E96 使用されていません - -
E97~E104 下位バイト - E105~E112 上位バイト - -
E113 使用されていません - E114 使用されていません - E115 パルスまたは動的補正無効 - 高
E116 バーンバック無効 - 高
E117 全電源範囲(0~30 メートル) - 高
E118~E120 使用されていません - -
E121 ROB I/O 出力 1 - 高
E122 ROB I/O 出力 2 - 高
-
JA
E123~E128 使用されていません - -
E129~E136 部品番号、タイプ 1 ASCII 32~254 -
E137~E144 部品番号、タイプ 2 ASCII 32~254 -
E145~E152 部品番号、タイプ 3 ASCII 32~254 -
E153~E160 部品番号、タイプ 4 ASCII 32~254 -
E161~E168 部品番号、タイプ 5 ASCII 32~254 -
E169~E176 部品番号、タイプ 6 ASCII 32~254 -
E177~E184 部品番号、タイプ 7 ASCII 32~254 -
E185~E192 部品番号、タイプ 8 ASCII 32~254 -
E193~E200 部品番号、タイプ 9 ASCII 32~254 -
E201~E208 部品番号、タイプ 10 ASCII 32~254 -
97
Page 98

シーケンス番号信号の指定 範囲 アクティビ
ティ
E209~E216 部品番号、タイプ 11 ASCII 32~254 -
外部ワイヤ送給装置
0~65535 -
、ワイヤ供給速度実行値
E217~E224 下位バイト - E225~E232 上位バイト - -
E233~E240 外部ワイヤ送給装置
0~255 -
、グリッドエラー
E241~E248 外部ワイヤ送給装置
0~255 -
、二次エラー
E249 外部ワイヤ送給装置有効 - 高
E250~E256 使用されていません - -
E257 TAG コマンドの読み取り - SF
E258 TAG コマンドの書き込み - SF
E259~264 使用されていません - -
TAG アドレス -
2)
出力信号(溶接電源
からロボットへ)
E265~272 下位バイト - E273~280 上位バイト - -
TAG 値 -
2)
E281~288 下位バイト - E289~296 上位バイト - -
2)
タグテーブル参照
シーケンス番号信号の指定 範囲 アクティビ
ティ
A01 アーク安定 - 高
A02 リミット信号
- 高
(RCU 5000i の場合のみ)
A03 プロセスアクティブ - 高
A04 グリッド電流信号 - 高
98
A05 トーチ衝突保護 - 高
A06 溶接電源準備完了 - 高
Page 99

シーケンス番号信号の指定 範囲 アクティビ
ティ
A07 通信準備完了 - 高
A08 ライフサイクルトグルビット 250 ミリ秒毎 -
A09~A16 エラー番号 0~255 -
A17~A24 使用されていません - -
A25 ワイヤスティックコントロール - 高
A26 使用されていません - -
JA
A27 ロボットアクセス
(RCU 5000i の場合のみ)
A28 ワイヤ利用可能 - 高
A29 短絡タイムアウト - 高
A30 データドキュメント準備完了
(RCU 5000i の場合のみ)
A31 使用されていません - A32 出力範囲外 - 高
溶接電圧実行値 0~65535(0~100 V) A33~A40 下位バイト - A41~A48 上位バイト - -
溶接電流実行値 0~65535(0~1000 A) A49~A56 下位バイト - A57~A64 上位バイト - -
A65~A72 モータ電流実行値 0~255(0~5 A) -
- 高
- 高
A73~A80 使用されていません - -
A81~A88 使用されていません - -
A89~A96 使用されていません - -
ワイヤ供給速度 0~65535
(-327.68~+327.67 メ
ートル / 分)
A97~A104 下位バイト - A105~A112 上位バイト - -
A113~A120 使用されていません - -
A121 ROB I/O 入力 1 - 高
-
99
Page 100

シーケンス番号信号の指定 範囲 アクティビ
ティ
A122 ROB I/O 入力 2 - 高
A123 ROB I/O 入力 3 - 高
A124 ROB I/O 入力 4 - 高
A125~A128 使用されていません - -
A129 上部ワイヤ供給速度制限 - 高
A130 下部ワイヤ供給速度制限 - 高
A131 上部電流制限 - 高
A132 下部電流制限 - 高
A133 上部電圧制限 - 高
A134 下部電圧制限 - 高
A135 ワイヤ送給装置モータ電流 - 高
A136 プッシュプルユニットモータ電流 - 高
A137 上部溶接速度制限 - 高
A138 下部溶接速度制限 - 高
A139~A144 使用されていません - A145~A152 使用されていません - A153~A160 使用されていません - A161~A168 使用されていません - A169~A176 使用されていません - A177~A184 使用されていません - A185~A192 使用されていません - A193~A200 使用されていません - A201~A208 使用されていません - A209~A216 使用されていません - -
外部ワイヤ送給装置
、ワイヤ供給速度設定値
A217~A224 下位バイト - A225~A232 上位バイト - -
外部ワイヤ送給装置
、ワイヤ供給速度スロープ
0~65535
(-327.68~+327.67 メ
ートル / 分)
0 x 3A98
(15 メートル / 分 / 秒)
-
100
A233~A240 下位バイト - A241~A248 上位バイト - -
A249~A256 使用されていません - -
A257 TAG ステータスの読み取り 高
 Loading...
Loading...