

Page 1

查询MC7445供应商
Freescale Semiconductor
Technical Data
MPC7455
RISC Microprocessor
Hardware Specifications
The MPC7455 and MPC7445 are implementations of the
PowerPC™ microprocessor family of reduced instruction set
computer (RISC) microprocessors. This document is primarily
concerned with the MPC7455; however, unless otherwise noted,
all information here also applies to the MPC7445. This document
describes pertinent electrical and physical characteristics of the
MPC7455. For functional characteristics of the processor, refer to
the MPC7450 RISC Microprocessor Family User’s Manual. To
locate any published updates for this document, refer to the
website at http://www.freescale.com.
1. Overview . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
2. Features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
3. Comparison with the MPC7400, MPC7410,
4. General Parameters . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
5. Elect r ical and Thermal Characteristics . . . . . . . . . . . 10
6. Pin Assignments . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
7. Pinout Listings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
8. Package Description . . . . . . . . . . . . . . . . . . . . . . . . . 41
9. System Design Information . . . . . . . . . . . . . . . . . . . 45
10. Document Revision History . . . . . . . . . . . . . . . . . . . 59
11. Ordering Information . . . . . . . . . . . . . . . . . . . . . . . . 60
MPC7455EC
Rev. 4.1, 02/2005
Contents
MPC7450, MPC7451, and MPC7441 . . . . . . . . . . . . . 7
1Overview
The MPC7455 is the thir d implementation o f the fourth g eneration
(G4) microprocess ors from Freescale. The MPC7455 imple ments
the full PowerPC 32-bit architecture and is targeted at networking
and computing systems applications. The MPC7455 consists of a
processor core, a 256-Kbyte L2, and an internal L3 tag and
controller which support a glueless backside L3 cache through a
dedicated high-ba ndwidth interface. The MPC7445 is identical to
the MPC7455 except it does not support the L3 cache int erface.
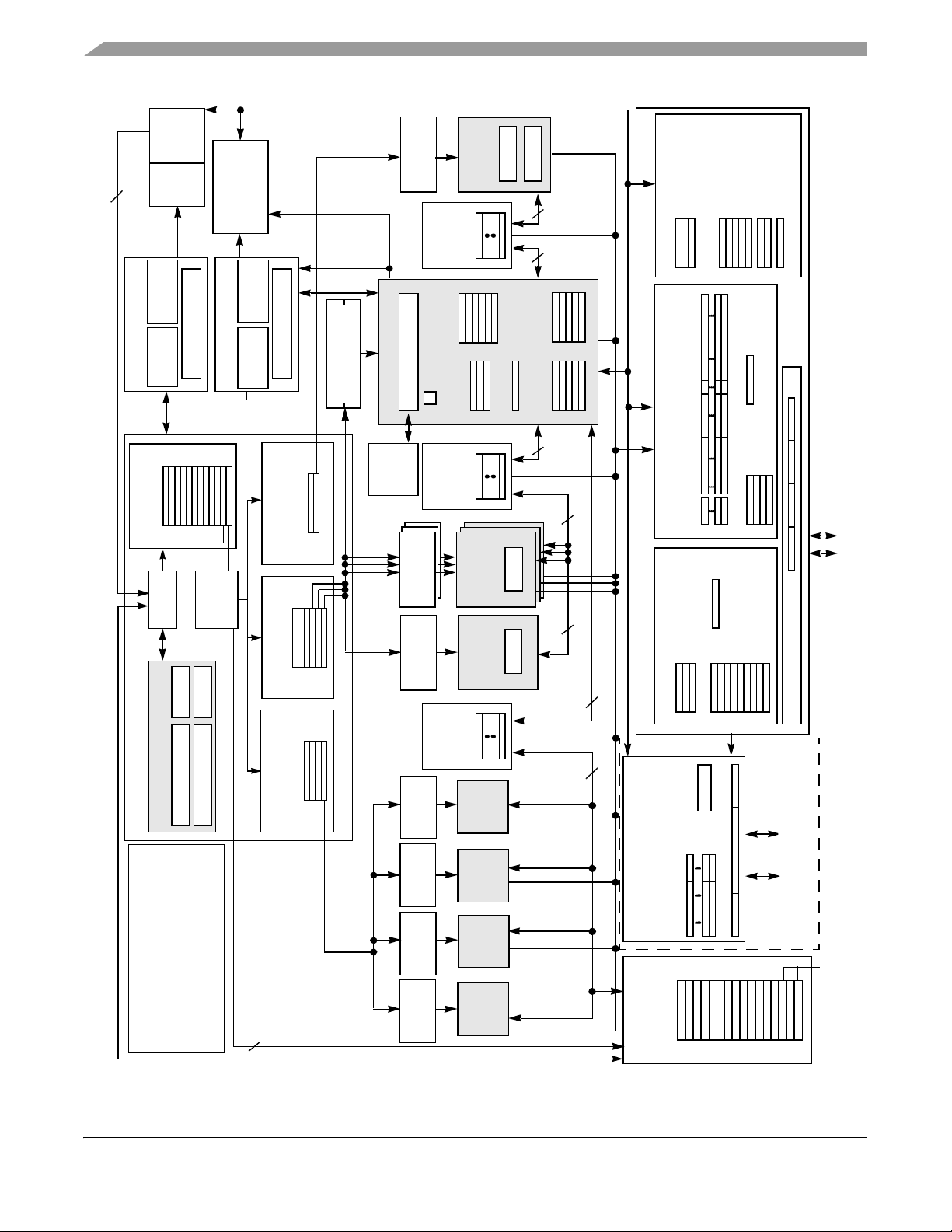
Figure 1 shows a block diagram of the MPC7455.
© Freescale Semiconductor, Inc., 2005. All rights reserved.
Page 2
Overview
I Cache
32-Kbyte
+x÷
FPSCR
Floating-
Stations (2)
D Cache
Tags
128-Bit (4 Instructions)
ITLB
128-Entry
32-Kbyte
Ta g s
DTLB
128-Entry
EA
Reservation
FPR File
PA
Point Unit
Buffers
16 Rename
FPSCR
Cacheable Store
Instruction Fetch (2)
(LSQ)
64-Bit
64-Bit
L1 Store Queue
L1 Service Queues
L1 Load Miss (5)
L1 Load Queue (LLQ)
Request (1)
Instruction MMU
Instruction Queue
Instruction Unit
Load Miss
Block 1 (32-Byte)
256-Kbyte Unified L2 Cache/Cache Controller
System Bus Interface
Stat us
Block 0 (32-Byte)
Status
Line
Ta g s
L2 Prefetch (3)
Bus Store Queue
L3CR
Stores
L1 Push
Completed
32-Bit
32-Bit
+
+
+
Memory Subsystem
32-Bit
x ÷
128-Bit128-Bit
Snoop Push/
Interventions
L2 Store Queue (L2SQ)
L1 Castouts
(4)
Push
Castout
Queue
(9)
External SRAM
36-Bit Address Bus 64-Bit Data Bus
Bus Accumulator
(1 or 2 Mbytes)
64-Bit Data
(8-Bit Parity)
Vector Touch Engine
Queue
Reservation
Reservation
Reservation
Reservation
Reservation
L1 Castout
(EA Calculation )
Stores
+
Finished
Buffers
GPR File
16 Rename
Integer
Integer
Integer
Buffers
16 Rename
Unit 2
(3)
Unit 2
Integer
Unit 2 Unit 1
FPU
Vector
Stat ion
Stat ion
Stat ion
Stations (2)
VR File
Stat ion
IBAT Array
Data MMU
SRs
(Shadow)
(12-Word)
Fetcher
Branch Processing Unit
Unit
Dispatch
LR
CTR
BTIC (128-Entry)
BHT (2048-Entry)
DBAT Array
SRs
(Original)
GPR Issue
(6-Entry/3-Issue) (4-Entry/2-Issue) (2-Entry/1-Issue )
VR Issue FPR Issue
Reservation
Load/Store Unit
Stations (2-Entry)
To u ch
Vector
Stat ion
Reservation
Stat ion
Reservation
Additional Features
• Time Base Counter/Decrementer
• Clock Multiplier
• JTAG/COP Interface
• Thermal/Power Management
96-Bit (3 Instructions)
• Performance Monitor
Stat io n
Reservation
Unit 1
Vector
Integer
Unit 2
Ve cto r
Integer
Unit
Vector
Permute
Completion Unit
L3 Cache Controller
StatusTa g s
Block 0/1 Line
Bus Accumulator
(16-Entry)
Completion Queue
18-Bit
Address
Not in
MPC7445
Completes up to three instructions per clock
Figure 1. MPC7455 Block Diagram
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
2 Freescale Semiconductor
Page 3

Features
The core is a high-performance superscalar design supporting a double-precision floating-point unit and a SIMD
multimedia unit. The memory storage subsyste m supports the MPX bus protocol and a subset of the 60x bus protocol
to main m emory a nd other system r esources. The L3 in terface supports 1 or 2 Mbytes of external SRAM for L3
cache data.
Note that the MPC7455 is footprint-compatible with the MPC7450 and MPC7451, and the MPC7445 is
footprint-co mpatible with the MPC7441.
2Features
This section summarizes features of the MPC7455 implementation of the PowerPC architecture.
Major features of the MPC7455 are as follows:
• High-performance, superscalar microprocessor
— As many as four instructions can be fetched from the instruction cache at a time
— As many as thr ee inst ruct i on s ca n be disp atch ed to the issue queu e s at a time
— As many as 12 instructions can be in the instruction queue (IQ)
— As many as 16 instructions can be at some stage of execution simultaneously
— Single-cycle execution for most instructions
— One instruction per clock cy cle thr oughput for most instructions
— Seven-stage pipeline control
• Eleven independent exec ution units and three register fil es
— Branch processing unit (BPU) features static and dynamic branch predi ction
– 128-entry (32-set, four-way set-associative) branch target instruction cache (BTIC), a cache of
branch instru ctions that ha ve been encounter ed in branc h/loop code sequ ences. If a ta rget inst ruction
is in the BTIC, it is fetched into the instruction queue a cycle sooner than it can be made available
from the instruction cache. Typically, a fetch that hits the BTIC provides the first four instructions
in the target stre am.
– 2048-entry bran ch history table (BHT) with two bits per entry for four leve ls of
prediction—not-ta ken, strongly not-taken, ta ken, and strongly taken
– Up to three outstanding spe culative branches
– Branch instructions that do not update the count register (CTR) or link register (LR) are often
removed from the instructi on stream.
– Eight-entry link register stack to predict the target address of Branch Conditional to Link Register
(bclr) instru cti ons
— Four integer units (IUs) that share 32 GPRs for integer operands
– Three identical I Us (IU1a , IU1 b, an d IU1c) can execute all integer instructions except multiply,
divide, and move to/from special-purpose register instructions
– IU2 executes misc ellaneous instruction s inc luding the CR logi cal oper ations, integer multiplica tion
and division instructions, and move to/from special-pu rpose register instructions
— Five-stag e FP U and a 32- en try FPR file
– Fully IEEE 754-1985-compliant FPU for both single- and double-precision operations
– Supports non-IEEE mode for time-critical operations
– Hardware support for de normalized numbers
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 3
Page 4

Features
– Thirty-two 64-bit FPRs for single- or double-precision operands
— Four vector units and 32-entry vector register file (VRs)
– Vector permute unit (VPU)
– Ve ctor integ er unit 1 (VIU1) handles short-latenc y AltiVec™ integer ins tructions, s uch as vect or add
instructions (vaddsbs, vaddshs, and vaddsws, for example)
– Vector integer unit 2 (VIU2) handles longer -latency AltiVec integer instruction s, suc h as vector
multiply add instruct ions (vmhaddshs, vmhraddshs, and vmladduhm, for example)
– Vector floating-point unit (VFPU)
— Three-stage load/store unit (LSU)
– Supports integer, floating-point, and vector instructi on load/store traffic
– Four-entry vector touch queue (VTQ) supports all four architected AltiVec data stream operations
– Three-cycle GPR and AltiVec load latency (byte, half -word, word, vector) with one-cycle
throughput
– Four-cyc le FPR load latency (single, double) with one-cycle throughput
– No additional delay for misaligned access within double-word boundary
– Dedicated ad der calculates effec tiv e add ress es (EA s )
– Supports store gat hering
– Performs alignmen t, nor malization, and precision conversion for floating-poi nt data
– Executes cache control and TLB instructions
– Performs alignmen t, z ero pa dding, and sign extension for integer data
– Supports hits under mis ses (multiple outstanding misses)
– Supports both big- and little-endian modes, including misaligned little-endian accesses
• Three issue queues FIQ, VIQ, and GIQ can accept as many as one, two, and three instru ctions, respect ively ,
in a cycle. Instruct io n disp a tc h requi re s the follo w ing:
— Instructions can be dis patched only from the three lowest IQ entries—IQ0, IQ1, and IQ2
— A maximum of three instructions can be dispa tched to the issue queues per clock cycle
— Space mus t be avai l abl e in the CQ fo r an instr u ction to disp at ch (t h is inclu des ins tru ct io ns tha t are
assigned a space in the CQ but not in an issue queue)
• Rename buffers
— 16 GPR rename buffers
— 16 FPR rename buffers
— 16 VR rename buffers
• Dispatch unit
— Decode/dispatch stage fully decodes each instruction
• Completion unit
— The completion unit retire s an instruction from the 16-entry comple tion queue (CQ) when all
instructions ahead of it have been completed, the instructi on has finishe d execution , and no exceptions
are pending.
— Guarantees sequentia l pr ogramming model (precise exception model)
— Monitors all dispatche d instructions and retires them in orde r
— Tracks unr esolved branches and flushes inst ructions after a mispredicted branc h
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
4 Freescale Semiconductor
Page 5

— Retires as many as three instructions per clock cycle
• Separate on-chip L1 instruction and data caches (Harvard architecture)
— 32-Kbyte, eight-way set-associative instruc tion and data caches
— Pseudo least-recently-used (PLRU) replacement algorithm
— 32-byte (eight-wor d) L1 cache block
— Physically indexed/physical tags
— Cache write-back or write-through operation programmable on a per-page or per-block basis
— Instruction cac he can provide four instructions per clock cycle; data cache can provide four words per
clock cycle
— Caches can be disabled in softwar e
— Caches can be locked in software
— MESI data cache coherency maintained in hardware
— Separate copy of data cache tags for efficient snooping
— Parity support on cache and tags
— No snooping of instruction cac he except for icbi instruction
— Data cache supports AltiVec LRU and transient instructions
— Critical double- and/or quad-word forwarding is performed as needed. Critical quad-word forwarding
is used for AltiVec loads and instruction fetches. Other accesses use critical double -word forwarding.
• Level 2 (L2) cac he interface
— On-chip, 256-Kbyte, ei ght-way set-associative unif ied instruction and data cache
— Fully pipelined to provi de 32 bytes per clock cycle to the L1 caches
— A total nine-cycle load lat en cy for an L1 data cache mis s that hits in L2
— PLRU replacement algorithm
— Cache write-back or write-through operation programmable on a per-page or per-block basis
— 64-byte, two-sectored line size
— Parity support on cache
• Level 3 (L3) cache interface (not implemented on MPC7445)
— Provides critical double-word forwarding to the requesting unit
— Internal L 3 cach e co ntr oller and tags
— External data SRAMs
— Support for 1- and 2-Mbyte L3 caches
— Cache write-back or write-through operation programmable on a per-page or per-block basis
— 64-byte (1M) or 128-byte (2M) sector ed line size
— Private memory capability for half (1-Mbyte minimum) or all of the L3 SRAM space
— Supports MSUG2 dual data rate (DDR) synchronous Burst SRAMs, PB2 pipelin ed synchronous Burst
SRAMs, and pipelined (register-register) late write synchronous Burst SRAMs
— Supports parity on cache and tags
— Configurable core-to-L3 frequency divisors
— 64-bit external L3 data bus sustains 64 bits per L3 clock cycle
Features
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 5
Page 6

Features
• Separate memory management units (MMUs) for instructions and data
— 52-bit virtual address; 32- or 36-bit physical address
— Address translation f or 4-Kbyte pages, variable-sized blocks, and 256-Mbyte segments
— Memory programmable a s write-back/write-through, caching-inhibited/caching-allowed, and m emory
coherency enforced /memory co herency not enforced on a page or block basis
— Separate IBATs and DBATs (eight each) also defined as SPRs
— Separate instruc tion and data translation lookasi de buffers (TLBs)
– Both TLBs are 128-entry, two-way set-associative, and use LRU replacement algorithm
– TLBs are hardware - or softwar e-reloa dable (that is, on a TLB miss a page table search is pe rformed
in hardware or by system software)
• Efficient data flow
— Although the VR/LSU interface is 128 bits, the L1/L2/L3 bus interface allows up to 256 bits
— The L1 data cache is fully pipelined to provide 128 bits/cycle to or from the VRs
— L2 cache is ful ly pipel in ed to pro vide 2 5 6 bits pe r proc es so r cloc k cycl e t o the L1 cac h e
— As many as eight outstanding, out-of-order, cache misses are allowed between the L1 data cache and
L2/L3 bus
— As many as 16 out-of-order transactions can be present on the MPX bus
— Store mer ging for multiple store misses to the same line. Only coherency action taken (address-only)
for store misses merge d to all 32 bytes of a cache block (no data tenure needed).
— Three-entry finish ed store queue and five-entry comple ted store queue between the LSU and the L1 data
cache
— Separate additiona l queues for eff icie nt buffe ring of outbound dat a (such as castout s and write through
stores) from the L1 data cache and L2 cache
• Multiprocessing support features include the following:
— Hardware-enforc ed, MESI cache coherency protocols for data cache
— Load/store with reserva tion instruction pair for at omic memory ref erences, semaphores, and other
multiprocessor ope rations
• Power and thermal management
— 1.3-V proces s or co re
— The following three power-saving modes are available to the system:
– Nap—Instruction fetching is halted. Only those clocks for the time base, decrementer, and JTAG
logic remain runn ing. The part goes into the doze state to snoop memory opera tions on the bus and
then back to nap using a QREQ
/QACK processor- system handshake protocol.
– Sleep—Power consump tion is f urthe r reduce d by di sabling b us snoo ping, le aving onl y the PLL in a
locked and running state. All internal functional units are disabled.
– Deep sleep—When the part is in the sleep state, the system can disable the PLL. The system can then
disable the SYSCLK source for greater system power savings. Power-on reset procedures for
restarting and relocking the PLL must be followed on exiting the deep sleep state.
— Thermal management facility provides software-controllable thermal management. Thermal
management is per formed thr ough the use of thr ee sup ervisor -le vel re gisters and an MPC7455-sp ecific
ther mal management exception.
— Instruction cache throttling provides control of instruction fetching to limit power consumption
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
6 Freescale Semiconductor
Page 7
Comparison with the MPC7400, MPC7410, MPC7450, MPC7451, and MPC7441
• Performance monitor can be used to help debug syst em designs and improve software efficiency
• In-system testabi lity and debugging features through JTAG boundary-scan capability
• Testability
— LSSD scan design
— IEEE 1149.1 JTAG interface
— Array built-in self test (ABIST)—factory test only
• Reliability and serviceability
— Parity checking on system bus and L3 cache bus
— Parity check in g on the L 2 and L3 cach e tag arrays
3 Comparison with the MPC7400, MPC7410, MPC7450,
MPC7451, and MPC7441
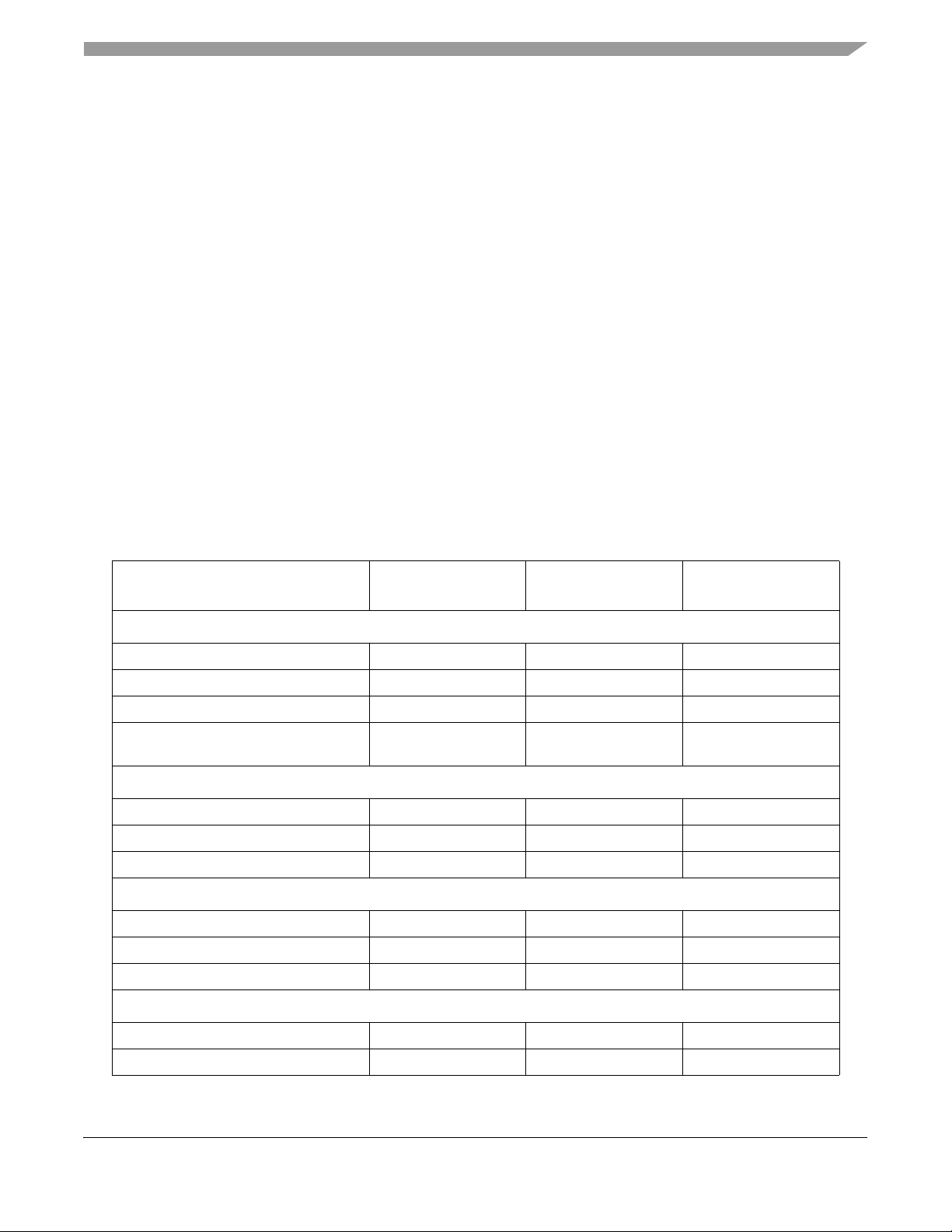
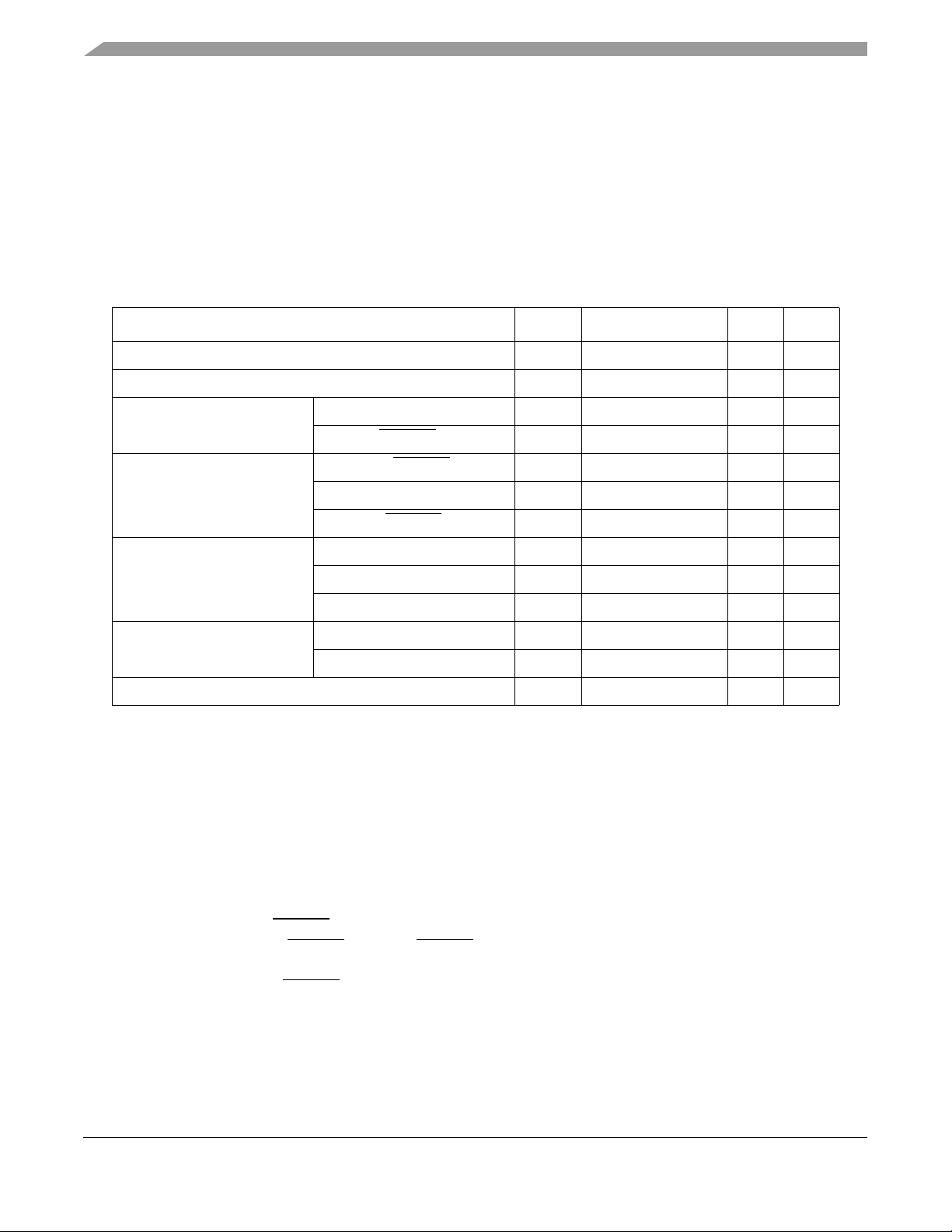
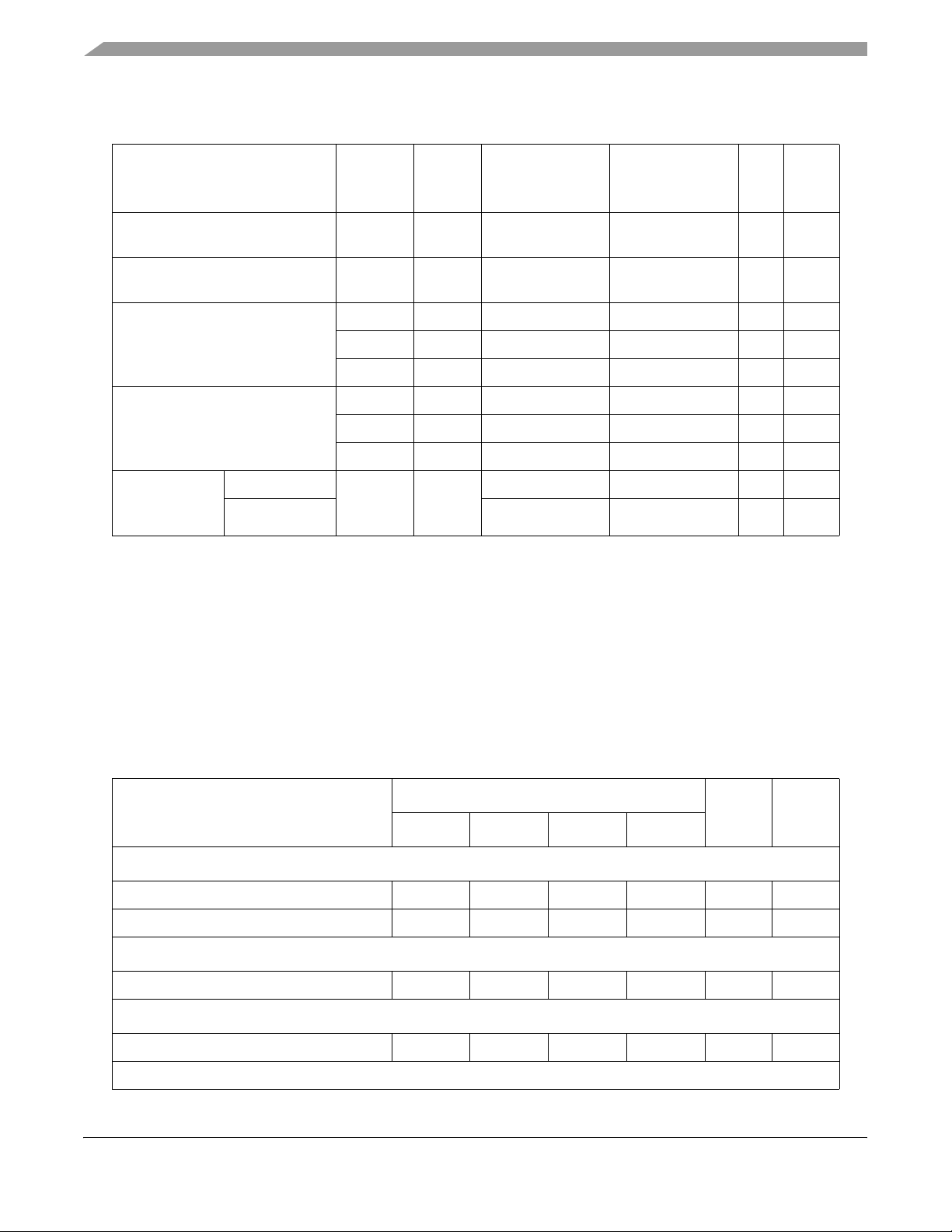
Table 1 compares the key features of the MPC7455 with the key features of the earlier MPC7400, MPC7410,
MPC7450, MPC7451, and MPC7441. To achieve a higher frequency, the number of logic levels per cycle is
reduced. Also, to achieve this higher frequency, the pipeline of the MPC7455 is extended (compared to the
MPC7400), while maintaining the same level of performance as measured by the number of instructions executed
per cycle (IPC).
Table 1. Microarchitecture Comparison
Microarchitectural Specs MPC7455/MPC7445
Basic Pipeline Functions
Logic inversions per cycle 18 18 28
Pipeline stages up to execute 5 5 3
Total pipeline stages (minimum) 7 7 4
Pipeline maximum instruction
throughput
Instruction buffer size 12 12 6
Completion buffer size 16 16 8
Renames (integer, float, vector) 16, 16, 16 16, 16, 16 6, 6, 6
Maximum Execution Throughput
SFX 332
Vector 2 (Any 2 of 4 Units) 2 (Any 2 of 4 Units) 2 (Permute/Fixed)
Scalar floating-point 1 1 1
3 + Branch 3 + Branch 2 + Branch
Pipeline Resources
MPC7450/MPC7451/
MPC7441
MPC7400/MPC7410
Out-of-Order Window Size in Execution Queues
SFX integer units 1 Entry × 3 Queues 1 Entry × 3 Queues 1 Entry × 2 Queues
Vector units In Order, 4 Queues In Order, 4 Queues In Order, 2 Queues
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 7
Page 8
Comparison with the MPC7400, MPC7410, MPC7450, MPC7451, and MPC7441
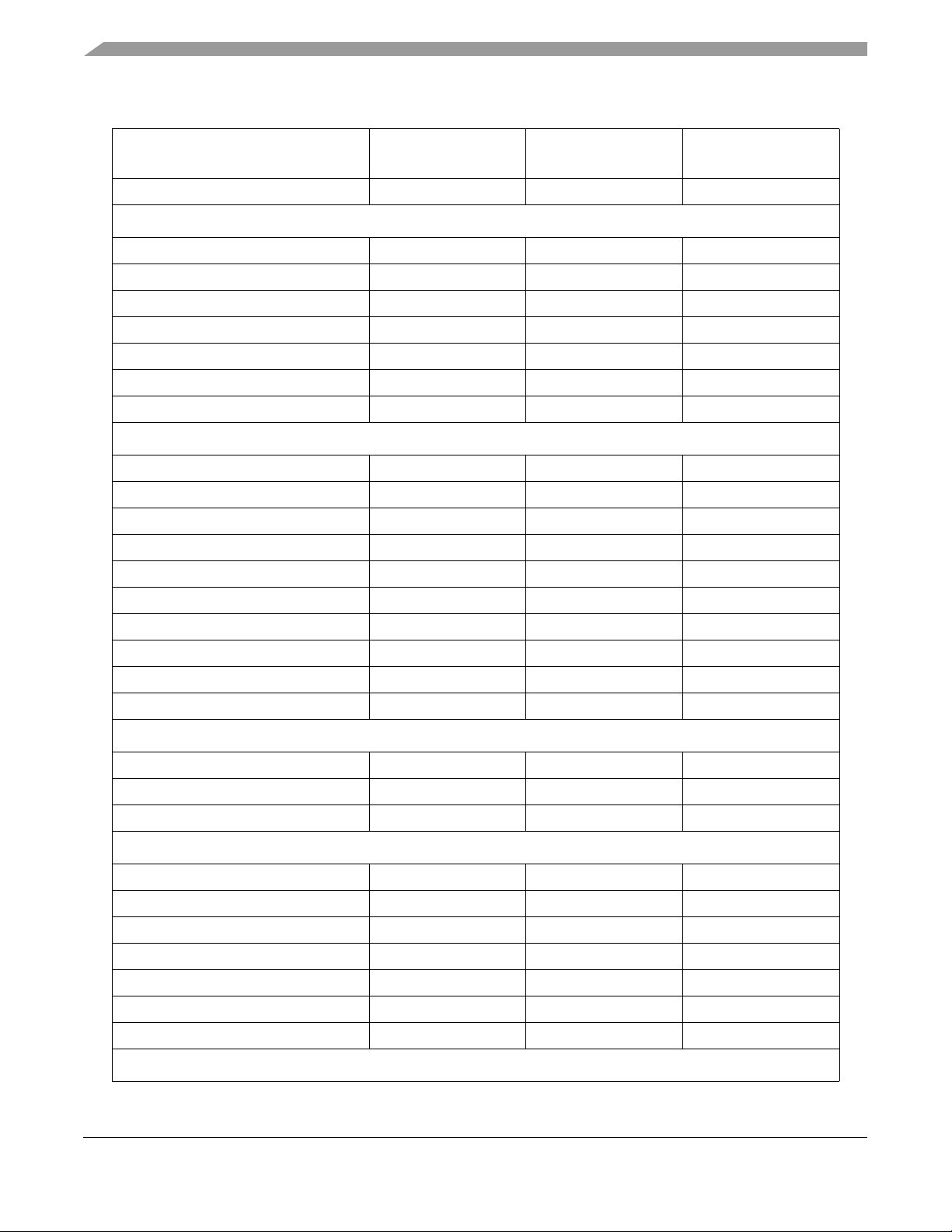
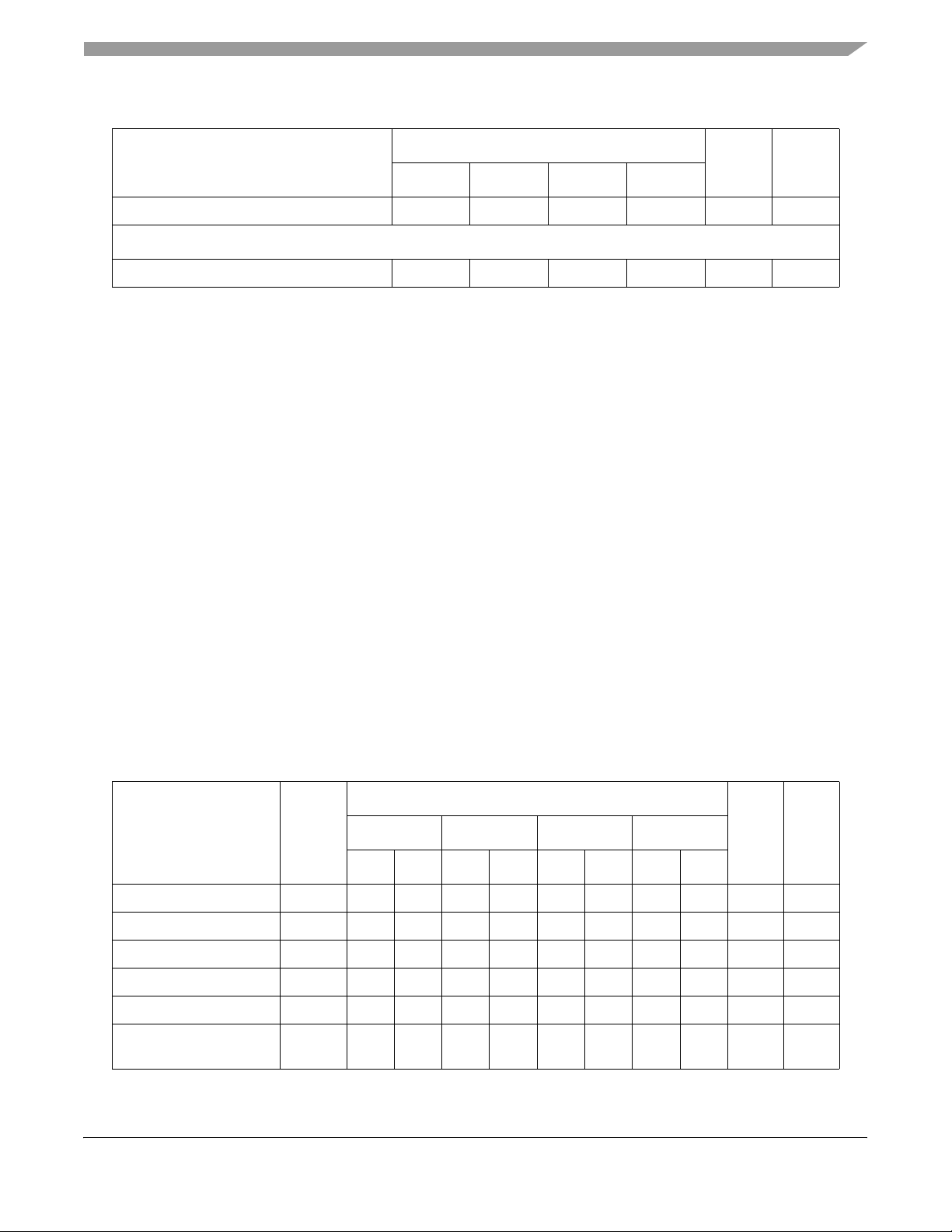
Table 1. Microarchitecture Comparison (continued)
Microarchitectural Specs MPC7455/MPC7445
MPC7450/MPC7451/
MPC7441
MPC7400/MPC7410
Scalar floating-point unit In Order In Order In Order
Branch Processing Resources
Prediction structures BTIC, BHT, Link Stack BTIC, BHT, Link Stack BTIC, BHT
BTIC size, associativity 128-Entry, 4-Way 128-Entry, 4-Way 64-Entry, 4-Way
BHT size 2K-Entry 2K-Entry 512-Entry
Link stack depth 8 8 None
Unresolved branches supported 3 3 2
Branch taken penalty (BTIC hit) 1 1 0
Minimum misprediction penalty 6 6 4
Execution Unit Timings (Latency-Throughput)
Aligned load (integer, float, vector) 3-1, 4-1, 3-1 3-1, 4-1, 3-1 2-1, 2-1, 2-1
Misaligned load (integer, float, vector) 4-2, 5-2, 4-2 4-2, 5-2, 4-2 3-2, 3-2, 3-2
L1 miss, L2 hit latency 9 Data/13 Instruction 9 Data/13 Instruction 9 (11)
1
SFX (aDd Sub, Shift, Rot, Cmp, logicals) 1-1 1-1 1-1
Integer multiply (32 × 8, 32 × 16, 32 × 32) 3-1, 3-1, 4-2 3-1, 3-1, 4-2 2-1, 3-2, 5-4
Scalar float 5-1 5-1 3-1
VSFX (vector simple) 1-1 1-1 1-1
VCFX (vector complex) 4-1 4-1 3-1
VFPU (vector float) 4-1 4-1 4-1
VPER (vector permute) 2-1 2-1 1-1
MMUs
TLBs (instruction and data) 128-Entry, 2-Way 128-Entry, 2-Way 128-Entry, 2-Way
Tablewalk mechanism Hardware + Software Hardware + Software Hardware
Instruction BATs/data BATs 8/8 4/4 4/4
L1 I Cache/D Cache Features
Size 32K/32K 32K/32K 32K/32K
Associativity 8-Way 8-Way 8-Way
Locking granularity Way Way Full Cache
Parity on I cache Word Word None
Parity on D cache Byte Byte None
Number of D cache misses (load/store) 5/1 5/1 8 (Any Combination)
Data stream touch engines 4 Streams 4 Streams 4 Streams
On-Chip Cache Features
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
8 Freescale Semiconductor
Page 9
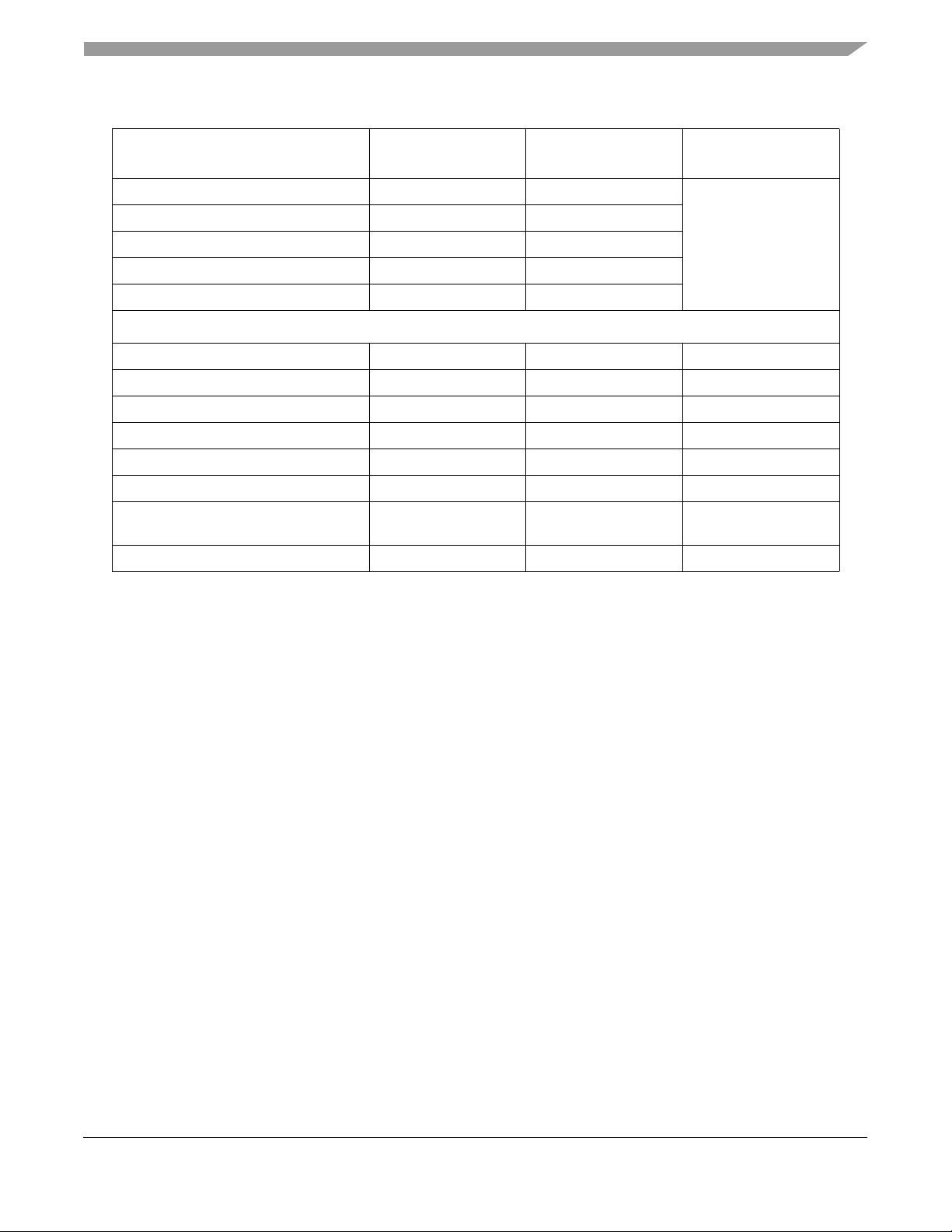
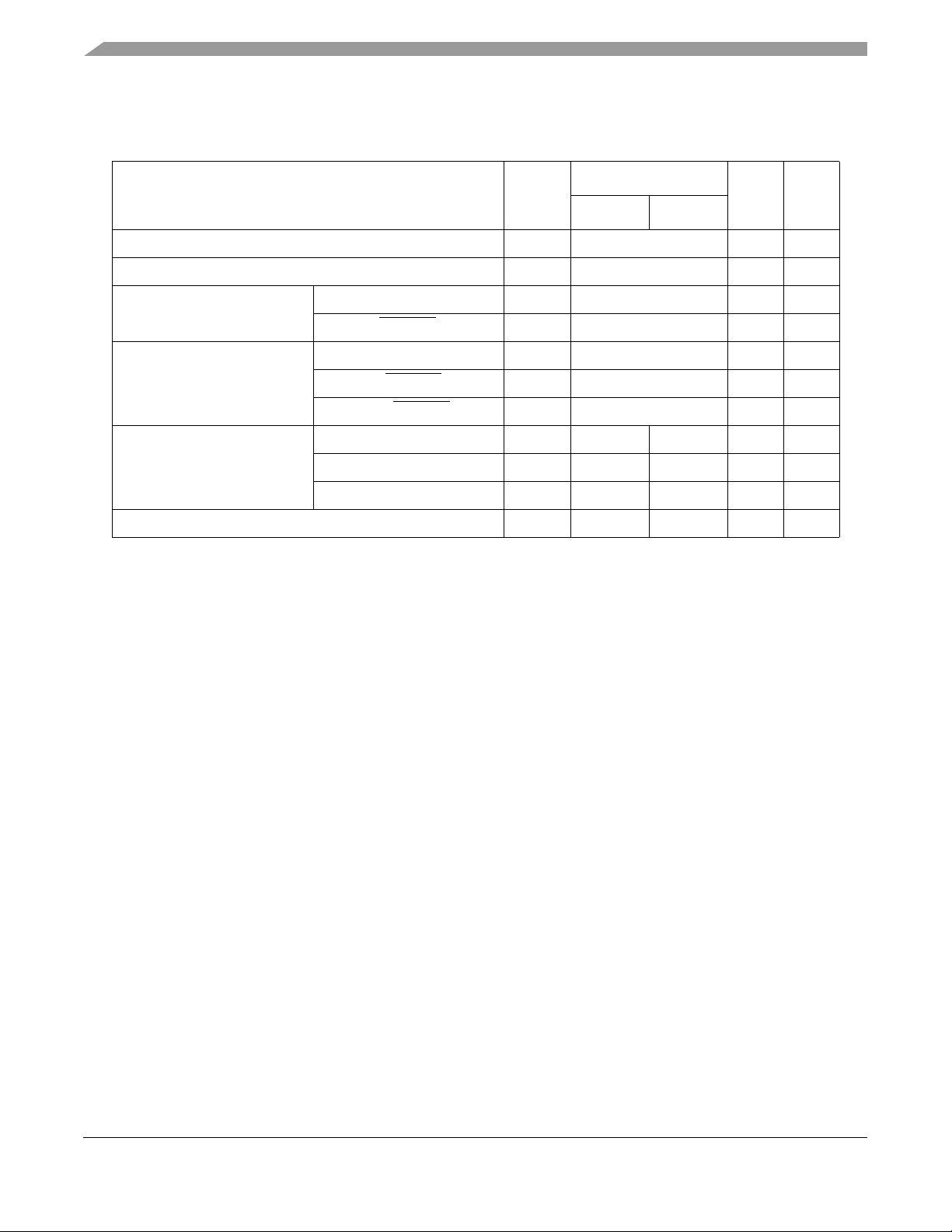
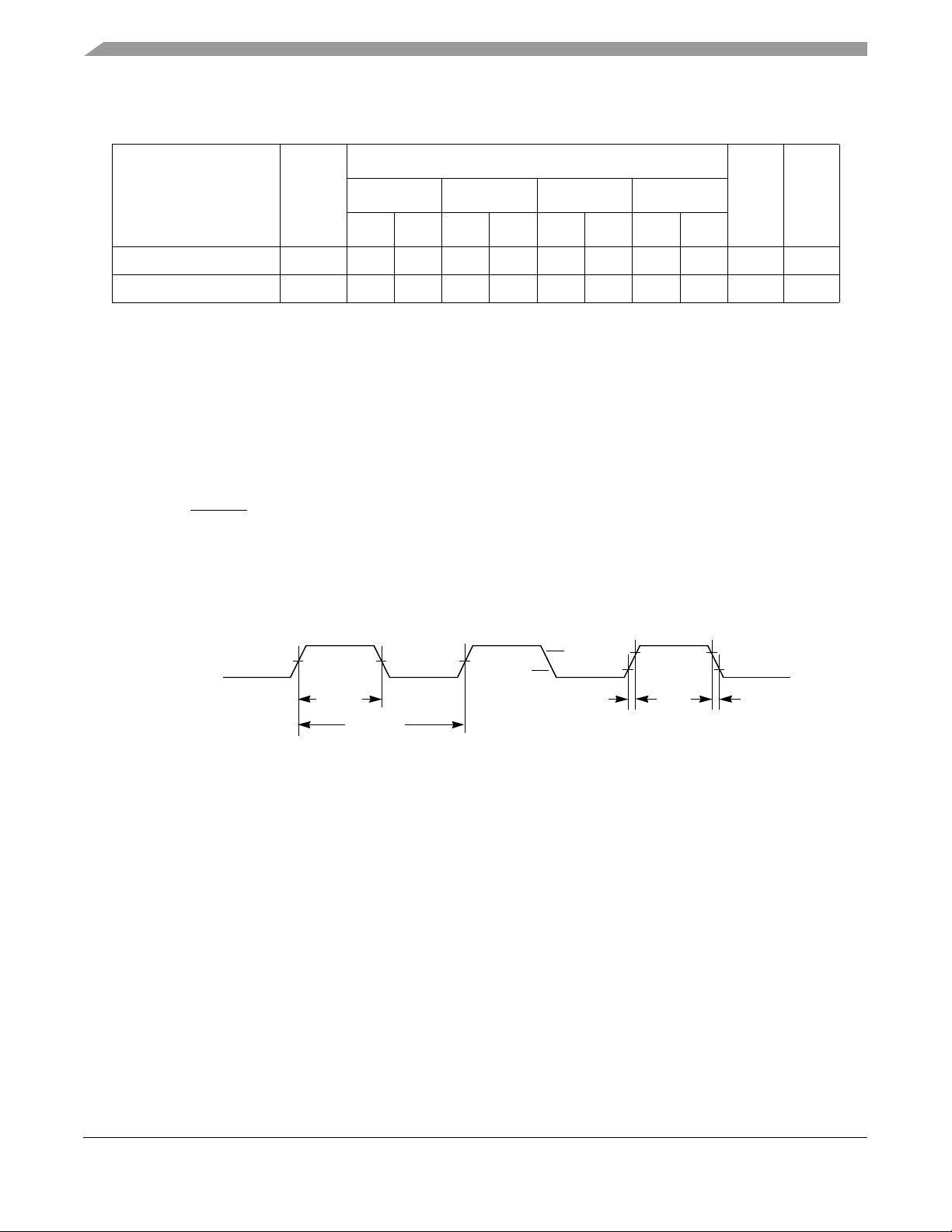
Table 1. Microarchitecture Comparison (continued)
General Parameters
Microarchitectural Specs MPC7455/MPC7445
Cache level L2 L2 L2 tags and controller
Size/associativity 256-Kbyte/8-Way 256-Kbyte/8-Way
Access width 256 Bits 256 Bits
Number of 32-byte sectors/line 2 2
Parity Byte Byte
Off-Chip Cache Support
Cache level L3L3L2
On-chip tag logical size 1MB, 2MB 1MB, 2MB 0.5MB, 1MB, 2MB
Associativity 8-Way 8-Way 2-Way
Number of 32-byte sectors/line 2, 4 2, 4 1, 2, 4
Off-chip data SRAM support MSUG2 DDR, LW, PB2 MSUG2 DDR, LW, PB2 LW, PB2, PB3
Data path width 64 64 64
Direct mapped SRAM sizes 1 Mbyte, 2 Mbytes 1 Mbyte, 2 Mbytes 0.5 Mbyte, 1 Mbyte,
Parity Byte Byte Byte
Notes:
1. Numbers in parentheses are for 2:1 SRAM.
2. Not implemented on MPC7445 or MPC7441.
3. Private memory feature not implemented on MPC7400.
MPC7450/MPC7451/
MPC7441
2
MPC7400/MPC7410
only (see off-chip cache
support below)
2Mbytes
3
4 General Parameters
The following list provide s a summary of the general parameters of the MPC7455:
T echnology 0.18 µm CMOS, six-layer metal
2
Die size 8.69 mm × 12.17 mm (106 mm
Trans istor count 33 million
Logic design Fully-static
Packages MPC7445: Surface mount 360 ceramic ball grid array (CBGA)
MPC7455: Surface mount 483 ceramic ball gr id array (CBGA)
Core power supply 1.3 V ± 50 mV DC nominal
I/O power supply 1.8 V ± 5% DC, or
2.5 V ± 5% DC, or
1.5 V ± 5% DC (L3 interface only)
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 9
)
Page 10
Electrical and Thermal Characteristics
5 Electrical and Thermal Characteristics
This section provides the AC and DC electrical specifications and thermal c haracteristics for the MPC7455.
5.1 DC Electrical Characteristics
The tables in this section describe the MPC7455 DC electrical characteristics. Table 2 provides the absolute
maximum ratings.
Table 2. Absolute Maximum Ratings
Characteristic Symbol Maximum Value Unit Notes
1
Core supply voltage V
PLL supply voltage AV
Processor bus supply voltage BVSEL = 0 OV
BVSEL = HRESET
L3 bus supply voltage L3VSEL = ¬HRESET
or OV
DD
OVDD –0.3 to 2.7 V 3, 7
GV
L3VSEL = 0 GV
L3VSEL = HRESET
or GV
DD
GVDD –0.3 to 2.7 V 3, 10
Input voltage Processor bus V
L3 bus V
JTAG signals V
Input voltage Processor bus V
JTAG signals V
Storage temperature range T
DD
DD
–0.3 to 1.95 V 3, 6
DD
DD
DD
in
in
in
in
in
stg
–0.3 to 1.95 V 4
–0.3 to 1.95 V 4
–0.3 to 1.65 V 3, 8
–0.3 to 1.95 V 3, 9
–0.3 to OVDD + 0.3 V 2, 5
–0.3 to GVDD + 0.3 V 2, 5
–0.3 to OVDD + 0.3 V
–0.3 to OVDD + 0.3 V 2, 5
–0.3 to OVDD + 0.3 V
–55 to 150 °C
Notes:
1. Functional and tested operating conditions are given in Tab le 4. Absolute maximum ratings are stress ratings only,
and functional operation at the maximums is not guaranteed. Stresses beyond those listed may affect device
reliability or cause permanent damage to the device.
2. Caution: Vin must not exceed OV
3. Caution: OV
/GVDD must not exceed VDD/AVDD by more than 2.0 V during normal operation; this limit may be
DD
or GVDD by more than 0.3 V at any time including during power-on reset.
DD
exceeded for a maximum of 20 ms during power-on reset and power-down sequences.
4. Caution: V
/AVDD must not exceed OVDD/GVDD by more than 1.0 V during normal operation; this limit may be
DD
exceeded for a maximum of 20 ms during power-on reset and power-down sequences.
5. V
may overshoot/undershoot to a voltage and for a maximum duration as shown in Figure 2.
in
6. BVSEL must be set to 0, such that the bus is in 1.8 V mode.
7. BVSEL must be set to HRESET
8. L3VSEL must be set to ¬HRESET
or 1, such that the bus is in 2.5 V mode.
(inverse of HRESET), such that the bus is in 1.5 V mode.
9. L3VSEL must be set to 0, such that the bus is in 1.8 V mode.
10.L3VSEL must be set to HRESET
or 1, such that the bus is in 2.5 V mode.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
10 Freescale Semiconductor
Page 11
Electrical and Thermal Characteristics
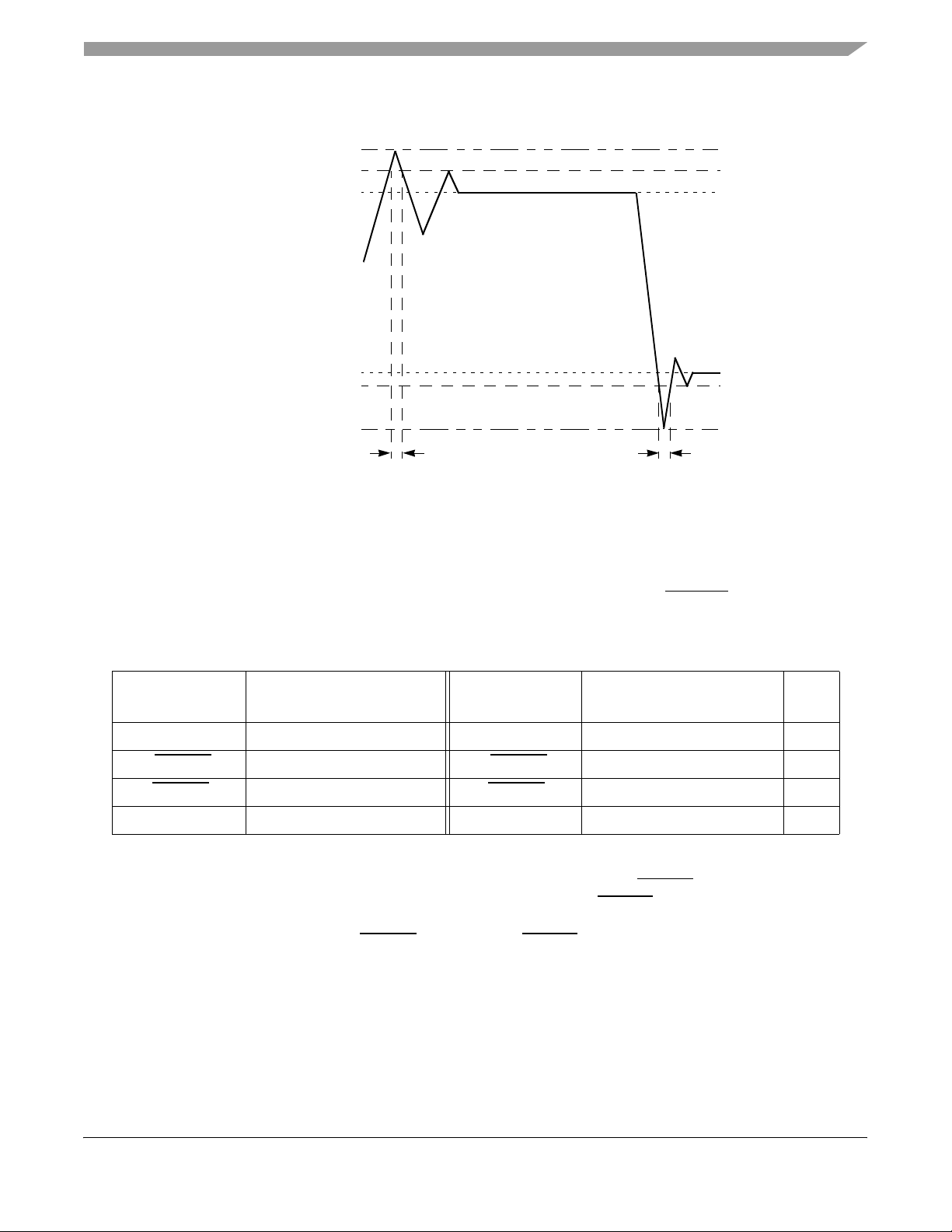
Figure 2 shows the undershoot and overshoot voltage on the MPC7455.
OVDD/GVDD + 20%
OVDD/GVDD + 5%
OVDD/GV
GND – 0.3 V
GND – 0.7 V
DD
V
V
GND
IH
IL
Not to Exceed 10%
of t
SYSCLK
Figure 2. Overshoot/Undershoot Voltage
The MPC7455 provides several I/O voltages to support both compatibility with existing systems and migration to
future systems. The MPC7455 core voltage must always be provided at nominal 1.3 V (see Table 4 f or actual
recommended core voltage ). Voltage to the L3 I/Os and processor inte rfa ce I/Os are provided through separate sets
of supply pins and may be provided at the voltages shown in Table 3. The input voltage threshold for each bus is
selected by sampling the state of the voltage select pins at the negation of the signal HRESET. The output voltage
will swing from GND to the maximum voltage applied to the OVDD or GVDD power pins.
Table 3. Input Threshold Voltage Setting
BVSEL Signal
0 1.8 V 0 1.8 V 1, 4
¬HRESET
HRESET
1 2.5 V 1 2.5 V 1
Notes:
1. Caution: The input threshold selection must agree with the OV
2. To select the 2.5-V threshold option for the processor bus, BVSEL should be tied to HRESET
change state together. Similarly, to select 2.5 V for the L3 bus, tie L3VSEL to HRESET
for selecting this mode of operation.
3. Applicable to L3 bus interface only. ¬HRESET
4. If used, pulldown resistors should be less than 250 Ω.
5. Not implemented on MPC7445.
Processor Bus Input
Threshold is Relative to:
Not Available ¬HRESET 1.5 V 1, 3
2.5 V HRESET 2.5 V 1, 2
L3VSEL Signal
/GVDD voltages supplied. See notes in Table 2.
DD
is the inverse of HRESET.
L3 Bus Input Threshold is
5
Relative to:
. This is the preferred method
Notes
so that the two signals
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 11
Page 12
Electrical and Thermal Characteristics
Table 4 provides the recommended operating conditions for the MPC7455.
Table 4. Recommended Operating Conditions
Recommended Value
Characteristic Symbol
1
Unit Notes
Min Max
Core supply voltage V
PLL supply voltage AV
Processor bus supply voltage BVSEL = 0 OV
BVSEL = HRESET
or OV
DD
OV
L3 bus supply voltage L3VSEL = 0 GV
L3VSEL = HRESET
L3VSEL = ¬HRESET
or GV
DD
GV
GV
Input voltage Processor bus V
L3 bus V
JTAG signals V
Die-junction temperature T
DD
DD
DD
DD
DD
DD
DD
in
in
in
j
1.3 V ± 50 mV V
1.3 V ± 50 mV V 2
1.8 V ± 5% V
2.5 V ± 5% V
1.8 V ± 5% V
2.5 V ± 5% V
1.5 V ± 5% V
GND OV
GND GV
GND OV
DD
DD
DD
V
V
V
0105°C
Notes:
1. These are the recommended and tested operating conditions. Proper device operation outside of these conditions
is not guaranteed.
2. This voltage is the input to the filter discussed in Section 9.2, “PLL Power Supply Filtering,” and not necessarily the
voltage at the AV
pin which may be reduced from VDD by the filter.
DD
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
12 Freescale Semiconductor
Page 13
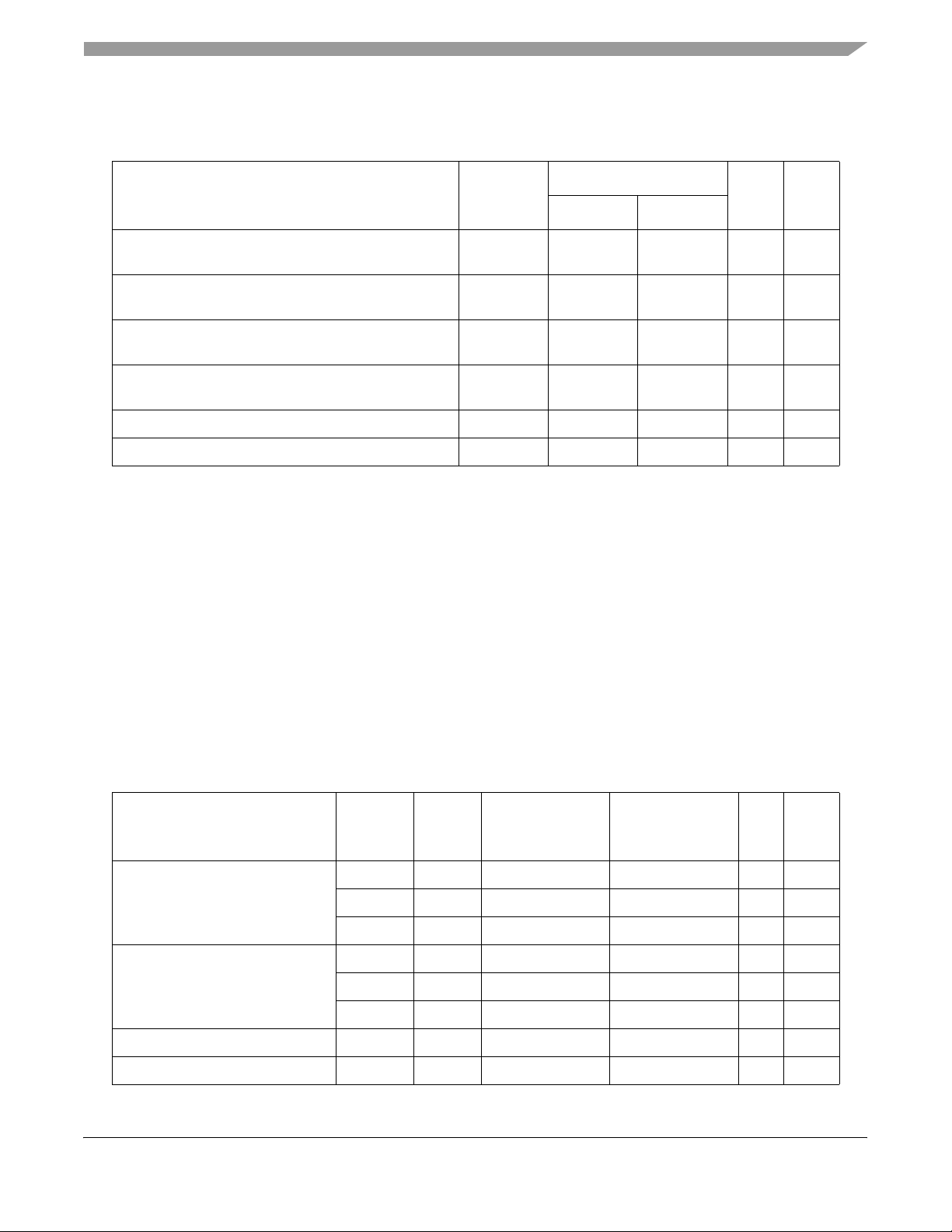
Table 5 provides the package thermal characteristics for the MPC7455.
Table 5. Package Thermal Characteristics
Characteristic Symbol
Electrical and Thermal Characteristics
6
Value
Unit Notes
MPC7445 MPC7455
Junction-to-ambient thermal resistance, natural
R
JA
θ
22 20 °C/W 1, 2
convection
Junction-to-ambient thermal resistance, natural
R
JMA
θ
14 14 °C/W 1, 3
convection, four-layer (2s2p) board
Junction-to-ambient thermal resistance, 200 ft/min
R
JMA
θ
16 15 °C/W 1, 3
airflow, single-layer (1s) board
Junction-to-ambient thermal resistance, 200 ft/min
R
JMA
θ
11 11 °C/W 1, 3
airflow, four-layer (2s2p) board
Junction-to-board thermal resistance R
Junction-to-case thermal resistance R
JB
θ
JC
θ
66°C/W4
<0.1 <0.1 °C/W 5
Notes:
1. Junction temperature is a function of on-chip power dissipation, package thermal resistance, mounting site (board)
temperature, ambient temperature, airflow, power dissipation of other components on the board, and board thermal
resistance.
2. Per SEMI G38-87 and JEDEC JESD51-2 with the single-layer board horizontal.
3. Per JEDEC JESD51-6 with the board horizontal.
4. Thermal resistance between the die and the printed-circuit board per JEDEC JESD51-8. Board temperature is
measured on the top surface of the board near the package.
5. Thermal resistance between the die and the case top surface as measured by the cold plate method
(MIL SPEC-883 Method 1012.1) with the calculated case temperature. The actual value of R
for the part is less
θJC
than 0.1°C/W.
6. Refer to Section 9.8, “Thermal Management Information,” for more details about thermal management.
Table 6 provides the DC electrical characteristics for the MPC7455.
Table 6. DC Electrical Specifications
At recommended oper ating conditions. See Ta bl e 4 .
Nominal
Characteristic
Input high voltage
(all inputs except SYSCLK)
Input low voltage
(all inputs except SYSCLK)
SYSCLK input high voltage — CV
SYSCLK input low voltage — CV
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 13
Bus
Voltage
1.5 V
1.8 V
2.5 V
1.5 V
1.8 V
2.5 V
Symbol Min Max Unit Notes
1
IH
IH
IH
IL
IL
IL
IH
IL
GVDD × 0.65 GVDD + 0.3 V 6
OVDD/GVDD × 0.65 OVDD/GVDD + 0.3 V
1.7 OVDD/GVDD + 0.3 V
–0.3 GVDD × 0.35 V 6
–0.3 OVDD/GVDD × 0.35 V
–0.3 0.7 V
1.4 OVDD + 0.3 V
–0.3 0.4 V
Page 14
Electrical and Thermal Characteristics
Table 6. DC Electrical Specifications (continued)
At recommended oper ating conditions. See Ta bl e 4 .
Nominal
Characteristic
Voltage
Bus
Symbol Min Max Unit Notes
1
Input leakage current,
V
= GVDD/OVDD + 0.3 V
in
High impedance (off-state) leakage
current, V
Output high voltage, I
Output low voltage, I
Capacitance,
V
=
in
f = 1 MHz
= GVDD/OVDD + 0.3 V
in
L3 interface — C
0 V,
All other inputs — 8.0 pF 4
= –5 mA 1.5 V
OH
5 mA 1.5 V
=
OL
—I
—I
1.8 V
2.5 V
1.8 V
2.5 V
in
TSI
OH
OVDD/GVDD – 0.45 — V
OH
OH
OL
OL
OL
in
—30µA2, 3
— 30 µA 2, 3, 5
GVDD – 0.45 — V 6
1.7 — V
—0.45V6
—0.45V
—0.7V
—9.5pF4
Notes:
1. Nominal voltages; see Table 4 for recommended operating conditions.
2. For processor bus signals, the reference is OV
while GVDD is the reference for the L3 bus signals.
DD
3. Excludes test signals and IEEE 1149.1 boundary scan (JTAG) signals.
4. Capacitance is periodically sampled rather than 100% tested.
5. The leakage is measured for nominal OV
direction (for example, both OV
and VDD vary by either +5% or –5%).
DD
/GVDD and VDD, or both OVDD/GVDD and VDD must vary in the same
DD
6. Applicable to L3 bus interface only.
Table 7 provides the power consumption for the MPC7455.
Table 7. Power Consumption for MPC7455
Processor (CPU) Frequency
Unit Notes
733 MHz 867 MHz 933 MHz 1 GHz
Full-Power Mode
Typical 11.5 12.9 13.6 15.0 W 1, 3
Maximum 17.0 19.0 20.0 22.0 W 1, 2
Doze Mode
Typical ————W4
Nap Mode
Typical 8.0 8.0 8.0 8.0 W 1, 3
Sleep Mode
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
14 Freescale Semiconductor
Page 15
Electrical and Thermal Characteristics
Table 7. Power Consumption for MPC7455 (continued)
Processor (CPU) Frequency
Unit Notes
733 MHz 867 MHz 933 MHz 1 GHz
Typical 7.6 7.6 7.6 7.6 W 1, 3
Deep Sleep Mode (PLL Disabled)
Typical 7.3 7.3 7.3 7.3 W 1, 3
Notes:
1. These values apply for all valid processor bus and L3 bus ratios. The values do not include I/O supply power (OVDD
and GV
power. Worst case power consumption for AV
2. Maximum power is measured at nominal V
sequence of instructions which keep the execution units, with or without AltiVec, maximally busy.
3. Typical power is an average value measured at the nominal recommended V
while running a typical code sequence.
4. Doze mode is not a user-definable state; it is an intermediate state between full-power and either nap or sleep mode.
As a result, power consumption for this mode is not tested.
) or PLL supply power (AVDD). OVDD and GVDD power is system dependent, but is typically <5% of VDD
DD
< 3 mW.
DD
(see Table 4) while running an entirely cache-resident, contrived
DD
(see Table 4) and 65°C in a system
DD
5.2 AC Electrical Characteristics
This section provides the AC electrical characteristics for the MPC7455. After fabrication, functional parts are
sorted by maximum processor core frequ ency as shown in Section 5.2.1, “Clock AC Specifications,” and tested for
conformance to the AC specifications for that frequency. The processor core frequency is determined by the bus
(SYSCLK) frequency and the settings of the PLL_CFG[0:4] signals. Parts are sold by maximum processor core
frequency; see Se ction 11, “Ordering Informati on .”
5.2.1 Clock AC Specifications
Table 8 provides the clock AC timing specifications as defined in Figure 3.
Table 8. Clock AC Timing Specifications
At recommended oper ating conditions. See Ta bl e 4 .
Maximum Processor Core Frequency
Characteristic Symbol
Processor frequency f
VCO frequency f
SYSCLK frequency f
SYSCLK cycle time t
SYSCLK rise and fall time t
SYSCLK duty cycle
measured at OV
DD
/2
t
core
VCO
SYSCLK
SYSCLK
, t
KR
KF
t
KHKL
SYSCLK
Min Max Min Max Min Max Min Max
500 733 500 867 500 933 500 1000 MHz 1
1000 1466 1000 1734 1000 1866 1000 2000 MHz 1
33 133 33 133 33 133 33 133 MHz 1
7.5 30 7.5 30 7.5 30 7.5 30 ns
—1.0—1.0—1.0—1.0 ns 2
/
40 60 40 60 40 60 40 60 % 3
Unit Notes733 MHz 867 MHz 933 MHz 1 GHz
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 15
Page 16
Electrical and Thermal Characteristics
Table 8. Clock AC Timing Specifications (continued)
At recommended oper ating conditions. See Ta bl e 4 .
Maximum Processor Core Frequency
Characteristic Symbol
Unit Notes733 MHz 867 MHz 933 MHz 1 GHz
Min Max Min Max Min Max Min Max
SYSCLK jitter — ± 150 — ± 150 — ± 150 — ± 150 ps 4, 6
Internal PLL relock time —100—100—100—100 µs5
Notes:
1. Caution: The SYSCLK frequency and PLL_CFG[0:4] settings must be chosen such that the resulting SYSCLK
(bus) frequency, CPU (core) frequency, and PLL (VCO) frequency do not exceed their respective maximum or
minimum operating frequencies. Refer to the PLL_CFG[0:4] signal description in Section 9.1, “PLL Configuration,”
for valid PLL_CFG[0:4] settings.
2. Rise and fall times for the SYSCLK input measured from 0.4 to 1.4 V.
3. Timing is guaranteed by design and characterization.
4. This represents total input jitter—short term and long term combined—and is guaranteed by design.
5. Relock timing is guaranteed by design and characterization. PLL-relock time is the maximum amount of time
required for PLL lock after a stable V
and SYSCLK are reached during the power-on reset sequence. This
DD
specification also applies when the PLL has been disabled and subsequently re-enabled during sleep mode. Also
note that HRESET
must be held asserted for a minimum of 255 bus clocks after the PLL-relock time during the
power-on reset sequence.
6. The SYSCLK driver’s closed loop jitter bandwidth should be <500 kHz at –20 dB. The bandwidth must be set low
to allow cascade connected PLL-based devices to track SYSCLK drivers with the specified jitter.
Figure 3 provides the SYSCLK input timing diagram.
SYSCLK
CV
IH
t
KR
t
KHKL
t
SYSCLK
VMVMVM
CV
IL
VM = Midpoint Voltage (OVDD/2)
Figure 3. SYSCLK Input Timing Diagram
t
KF
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
16 Freescale Semiconductor
Page 17
Electrical and Thermal Characteristics
5.2.2 Processor Bus AC Specifications
Table 9 provides the processor bus AC timing specifications for the MPC7455 as defined in Figure 4 and Figure 5.
Timing spe cifications for the L3 bus are provided in Section 5.2.3, “L3 Clock AC Specifications.”
Table 9. Processor Bus AC Timing Specifications
At recommended oper ating conditions. See Ta bl e 4 .
Parameter Symbol
All Speed Grades
2
Min Max
1
Unit Notes
Input setup times:
A[0:35], AP[0:4], GBL
, TBST, TSIZ[0:2], TT[0:3], D[0:63],
DP[0:7]
AACK
, ARTRY, BG, CKSTP_IN, DBG, DTI[0:3], QACK, TA,
TBEN, TEA
BMODE
, TS, EXT_QUAL, PMON_IN, SHD[0:1]
[0:1], BVSEL, L3VSEL
Input hold times:
A[0:35], AP[0:4], GBL
, TBST, TSIZ[0:2], TT[0:3], D[0:63],
DP[0:7]
AACK
, ARTRY, BG, CKSTP_IN, DBG, DTI[0:3], QACK, TA,
TBEN, TEA
BMODE
, TS,EXT_QUAL, PMON_IN, SHD[0:1]
[0:1], BVSEL, L3VSEL
Output valid times:
A[0:35], AP[0:4], GBL
, TBST, TSIZ[0:2], TT[0:3], WT, CI
TS
D[0:63], DP[0:7]
/SHD0/SHD1
ARTRY
BR, CKSTP_OUT, DRDY, HIT, PMON_OUT, QREQ]
Output hold times:
A[0:35], AP[0:4], GBL
, TBST, TSIZ[0:2], TT[0:3], WT, CI
TS
D[0:63], DP[0:7]
/SHD0/SHD1
ARTRY
BR, CKSTP_OUT, DRDY, HIT, PMON_OUT, QREQ
t
AVKH
t
IVKH
t
MVKH
t
AXKH
t
IXKH
t
MXKH
t
KHAV
t
KHTSV
t
KHDV
t
KHARV
t
KHOV
t
KHAX
t
KHTSX
t
KHDX
t
KHARX
t
KHOX
2.0
2.0
2.0
0
0
0
—
—
—
—
—
0.5
0.5
0.5
0.5
0.5
—
—
—
—
—
—
2.5
2.5
2.5
2.5
2.5
—
—
—
—
—
ns
8
ns
8
ns
ns
SYSCLK to output enable t
SYSCLK to output high impedance (all except TS
SHD0
, SHD1)
SYSCLK to TS
Maximum delay to ARTRY
high impedance after precharge t
/SHD0/SHD1 precharge t
, ARTRY,
KHOE
t
KHOZ
KHTSPZ
KHARP
0.5 — ns
—3.5ns
—1t
—1t
SYSCLK
SYSCLK
3, 4, 5
3, 5,
6, 7
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 17
Page 18
Electrical and Thermal Characteristics
Table 9. Processor Bus AC Timing Specifications 1 (continued)
At recommended oper ating conditions. See Ta bl e 4 .
Parameter Symbol
All Speed Grades
2
Min Max
Unit Notes
SYSCLK to ARTRY/SHD0/SHD1 high impedance after
precharge
t
KHARPZ
—2t
SYSCLK
3, 5,
6, 7
Notes:
1. All input specifications are measured from the midpoint of the signal in question to the midpoint of the rising edge of the input
SYSCLK. All output specifications are measured from the midpoint of the rising edge of SYSCLK to the midpoint of the signal
in question. All output timings assume a purely resistive 50-Ω load (see Figure 4). Input and output timings are measured at
the pin; time-of-flight delays must be added for trace lengths, vias, and connectors in the system.
2. The symbology used for timing specifications herein follows the pattern of t
t
(reference)(state)(signal)(state)
for outputs. For example, t
symbolizes the time input signals (I) reach the valid state (V)
IVKH
(signal)(state)(reference)(state)
relative to the SYSCLK reference (K) going to the high (H) state or input setup time. And t
KHOV
for inputs and
symbolizes the time from
SYSCLK(K) going high (H) until outputs (O) are valid (V) or output valid time. Input hold time can be read as the time that the
input signal (I) went invalid (X) with respect to the rising clock edge (KH) (note the position of the reference and its state for
inputs) and output hold time can be read as the time from the rising edge (KH) until the output went invalid (OX).
3. t
is the period of the external clock (SYSCLK) in ns. The numbers given in the table must be multiplied by the period of
sysclk
SYSCLK to compute the actual time duration (in ns) of the parameter in question.
4. According to the bus protocol, TS
before returning to high impedance as shown in Figure 6. The nominal precharge width for TS
than the minimum t
SYSCLK
is driven only by the currently active bus master. It is asserted low then precharged high
is 0.5 × t
SYSCLK
, that is, less
period, to ensure that another master asserting TS on the following clock will not contend with the
precharge. Output valid and output hold timing is tested for the signal asserted. Output valid time is tested for precharge. The
high-impedance behavior is guaranteed by design.
5. Guaranteed by design and not tested.
6. According to the bus protocol, ARTRY
AACK
. Bus contention is not an issue because any master asserting ARTRY will be driving it low. Any master asserting it low
in the first clock following AACK
cycle after the assertion of AACK
impedance as shown in Figure 6 before the first opportunity for another master to assert ARTRY
can be driven by multiple bus masters through the clock period immediately following
will then go to high impedance for one clock before precharging it high during the second
. The nominal precharge width for ARTRY is 1.0 t
; that is, it should be high
SYSCLK
. Output valid and output
hold timing is tested for the signal asserted. The high-impedance behavior is guaranteed by design.
7. According to the MPX bus protocol, SHD0
is the same as ARTRY
, that is, the signal is high impedance for a fraction of a cycle, then negated for up to an entire cycle
(crossing a bus cycle boundary) before being three-stated again. The nominal precharge width for SHD0
t
8. BMODE
. The edges of the precharge vary depending on the programmed ratio of core-to-bus (PLL configurations).
SYSCLK
[0:1] and BVSEL are mode select inputs and are sampled before and after HRESET negation. These paramenters
and SHD1 can be driven by multiple bus masters beginning the cycle of TS. Timing
and SHD1 is 1.0
represent the input setup and hold times for each sample. These values are guaranteed by design and not tested. These
inputs must remain stable after the second sample. See Figure 5 for sample timing.
Figure 4 provides the AC test load for the MPC7455.
Output
Z0 = 50 Ω
R
= 50 Ω
L
Figure 4. AC Test Load
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
18 Freescale Semiconductor
OVDD/2
Page 19
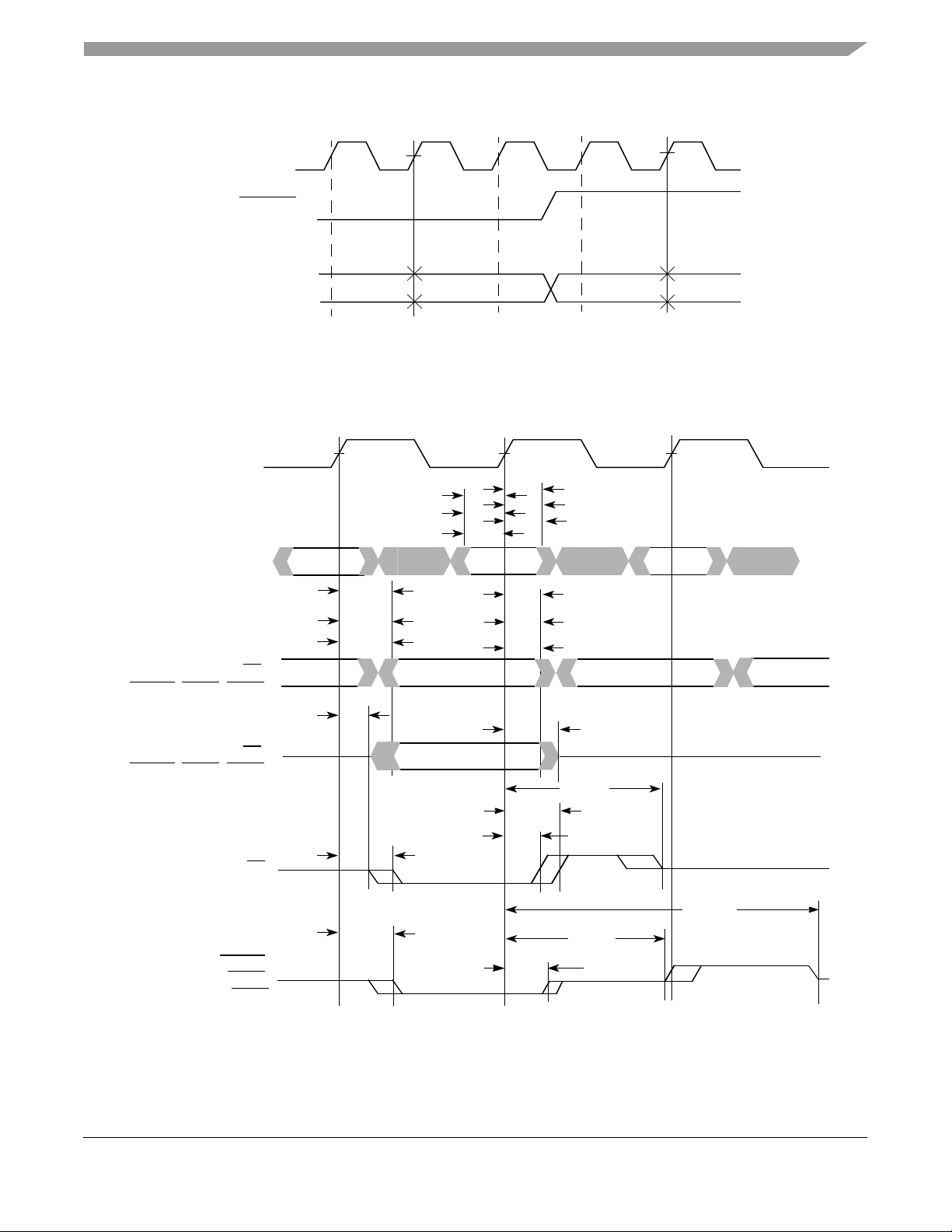
Figure 5 provides the mode select input timing diagram for the MPC7455.
Electrical and Thermal Characteristics
SYSCLK
VM
HRESET
Mode Signals
Firs t Sample Second Sample
VM = Midpoint Voltage (OVDD/2)
Figure 5. Mode Input Timing Diagram
Figure 6 provides the input/output timing diagram for the MPC7455.
SYSCLK
All Inputs
All Outputs
(Except TS,
ARTRY, SHD0, SHD1)
All Outputs
(Except TS
ARTRY, SHD0, SHD1)
TS
VM
t
AVKH
t
IVKH
t
MVKH
t
KHAV
t
KHDV
t
KHOV
t
KHOE
,
t
KHTSV
VM
t
AXKH
t
IXKH
t
MXKH
t
KHAX
t
KHDX
t
KHOX
t
KHOZ
t
KHTSPZ
t
KHTSV
t
KHTSX
VM
VM
t
KHARPZ
t
KHARV
ARTRY,
SHD0,
t
KHARP
t
KHARX
SHD1
VM = Midpoint Voltage (OV
DD
/2)
Figure 6. Input/Output Timing Diagram
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 19
Page 20
Electrical and Thermal Characteristics
5.2.3 L3 Clock AC Specifications
The L3_CLK frequency is programmed by the L3 configuration register (L3CR[6:8]) core-to-L3 divisor ratio. See
Table 18 for example core and L3 frequencies at var ious divisor s. Table 10 provides the potential range of L3_CLK
output AC timing specifications as defined in Figure 7.
The maximum L3_CLK frequency is the core frequency divided by two. Given the high core frequencies available
in the MPC7455, however, most SRAM designs will be not be a ble to operate in this mode usi ng cur rent te chnology
and, as a result, will sel ect a gr eater c ore-to-L3 div isor to provi de a long er L3_CLK perio d for re ad and write a ccess
to the L3 SRAMs. Therefore, the typical L3_CLK frequency shown in Table 10 is considered to be the practical
maximum in a typical system. The maximum L3_CLK frequency for any application of the MPC7455 will be a
function of the AC timings of the MPC7455, the AC timings for the SRAM, bus loading, and printed-circuit board
trace length, and may be greater or less tha n the value given in Table 10.
Freescale is similarly limited by system constraints and cannot perform tests of the L3 interface on a socketed part
on a functional tester at the maximum frequencies of Table 10. Therefore, functional operation and AC timing
information are test ed at core-to-L3 divisors which resul t in L3 frequencies at 200 MHz or less.
Table 10. L3_CLK Output AC Timing Specifications
At recommended oper ating conditions. See Ta bl e 4 .
All Speed Grades
Parameter Symbol
Min Typ Max
Unit Notes
L3 clock frequency f
L3 clock cycle time t
L3 clock duty cycle t
L3 clock output-to-output skew (L1_CLK0 to
L1_CLK1)
L3 clock output-to-output skew (L1_CLK[0:1]
to L1_ECHO_CLK[2:3])
L3 clock jitter — — ±50 ps 5
Notes:
1. The maximum L3 clock frequency will be system dependent. See Section 5.2.3, “L3 Clock AC Specifications,” for
an explanation that this maximum frequency is not functionally tested at speed by Freescale.
2. The nominal duty cycle of the L3 output clocks is 50% measured at midpoint voltage.
3. Maximum possible skew between L3_CLK0 and L3_CLK1. This parameter is critical to the address and control
signals which are common to both SRAM chips in the L3.
4. Maximum possible skew between L3_CLK0 and L3_ECHO_CLK1 or between L3_CLK1 and L3_ECHO_CLK3 for
PB2 or late write SRAM. This parameter is critical to the write data signals which are separately latched onto each
SRAM part by these pairs of signals.
5. Guaranteed by design and not tested. The input jitter on SYSCLK affects L3 output clocks and the L3
address/data/control signals equally and, therefore, is already comprehended in the AC timing and does not have
to be considered in the L3 timing analysis. The clock-to-clock jitter shown here is uncertainty in the internal clock
period caused by supply voltage noise or thermal effects. This must be accounted for, along with clock skew, in
any L3 timing analysis.
L3_CLK
L3_CLK
CHCL/tL3_CLK
t
L3CSKW1
t
L3CSKW2
75 250 — MHz 1
— 4.0 13.3 ns
50 % 2
— — 200 ps 3
— — 100 ps 4
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
20 Freescale Semiconductor
Page 21

The L3_CLK timing diagram is shown in Figure 7.
Electrical and Thermal Characteristics
L3_CLK0
L3_CLK1
For PB2 or Late Write:
L3_ECHO_CLK1
L3_ECHO_CLK3
VM
t
CHCL
t
L3_CLK
VM
VM
VM
VMVM
VMVM VM
VMVM VM
t
L3CR
t
L3CSKW1
t
L3CSKW2
t
L3CSKW 2
VM
VM
VM
t
L3CF
Figure 7. L3_CLK_OUT Output Timing Diagram
5.2.4 L3 Bus AC Specifications
The MPC7455 L3 interface supports three different types of SRAM: source-synchronous, double data rate (DDR)
MSUG2 SRAM, late write SRAMs, and pipeline burst (PB2) SRAMs. Each requir es a different protocol on the L3
interface and a dif fere nt routing of the L3 clock si gnals. The type of SRAM is programmed in L3CR[22: 23] and the
MPC7455 then follows the appropriate protocol for that type. The designer must connect and route the L3 signals
appropriately fo r each type of SRAM. Following are some observations about the chip-to-SRAM interface.
• The routing for the point-t o-point signals (L3_CLK[0:1], L3DATA[0:63], L3DP[0:7], and
L3_ECHO_CLK[0:3]) to a par ticular SRAM should be dela y matched. If ne cessary , t he length of tr aces can
be altered in order to intentionally skew the timing and provide additional setup or hold time margin.
• For a 1-Mbyte L3, use address bits 16:0 (bit 0 is LSB).
• No pull-up resistors are required for the L3 interface.
• For high speed operations, L3 interface address and control signals should be a ‘T’ with minimal stubs to
the two loads; data and clock signals should be point-to-point to their single load. Figure 8 shows the AC
test load for the L3 interface.
Output
Z0 = 50 Ω
R
= 50 Ω
L
GVDD/2
Figure 8. AC Test Load for the L3 Interface
In general, if rout ing is short, dela y-matched, and desi gned for incident wave reception and minimal ref lection, the re
is a high probability that the AC timing of the MPC7455 L3 interface will meet the maximum frequency operation
of appropriately chosen SRAMs. This is despite the pessimistic, guard-banded AC specifications (see Table 12,
Table 13, and Table 14), the limitations of functional testers described in Section 5.2.3, “L3 Clock AC
Specifications
,” and the uncertainty of clocks and signals which inevitably make worst-case critical path timing
analysis pes sim isti c.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 21
Page 22
Electrical and Thermal Characteristics
More specifically, certain signals within groups should be delay-matched with others in the same group while
intergroup routing is less critical. Only the address and control signals are common to both SRAMs and additional
timing margin is avail able for these signals. The double-clocked data signals are grouped with individual cloc ks as
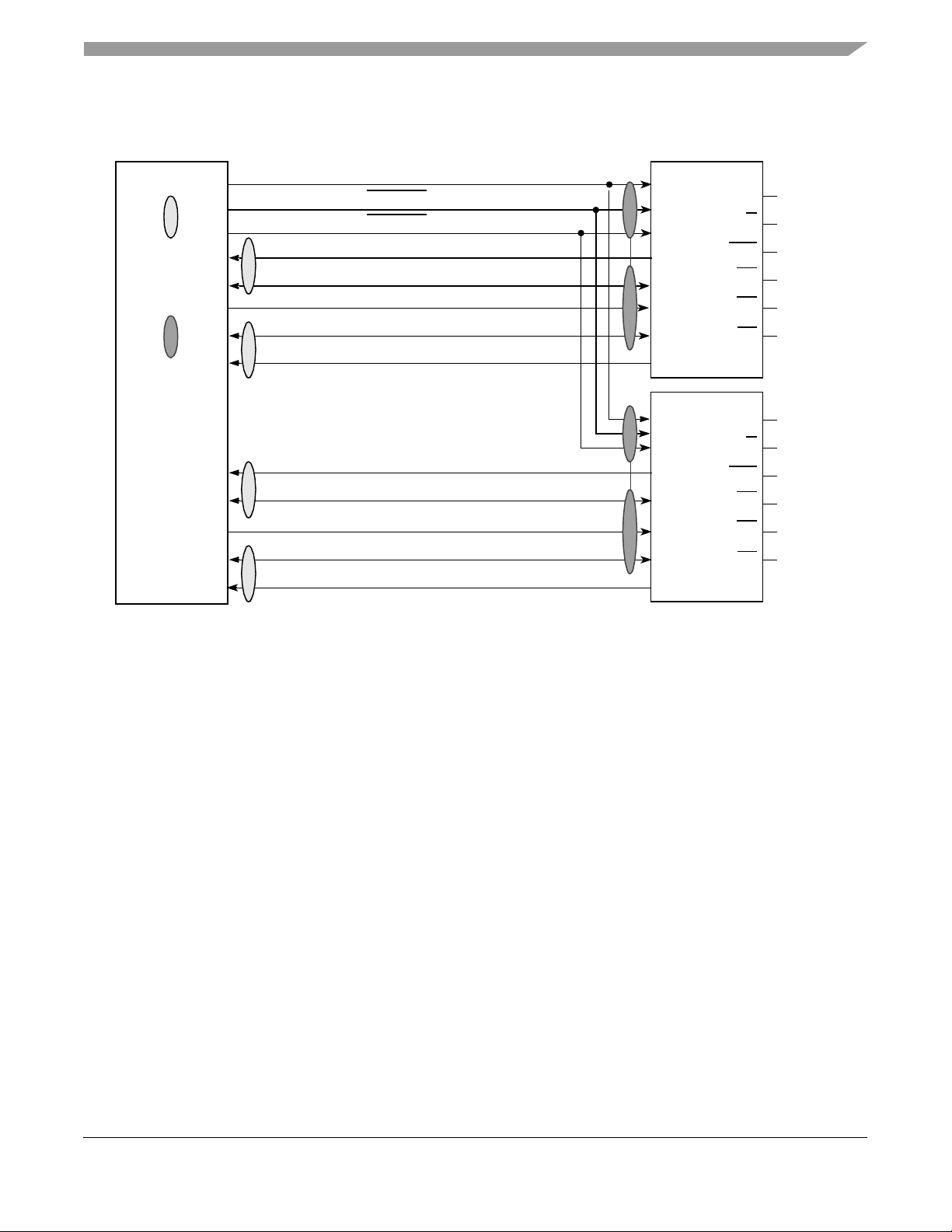
shown in Figure 9 or Figure 11, depending on the type of SRAM. For example, for the MSUG2 DDR SRAM (see
Figure 9); L3DA TA[0:31], L3DP[0:3], a nd L3_CLK[0] f orm a closely coupled group of outputs f rom the MPC7455;
while L3DATA[0:15], L3DP[0:1], and L3_ECHO_CLK[0] form a closely coupled group of inputs.
The MPC7450 RISC Micr opr oc essor Family User’s Manual refers to logical settings called ‘sample points’ used in
the synchronization of reads from the receive FIFO. The computation of the correct value for this setting is
system-dependent and is described in the MPC7450 RISC Microprocessor Family User’s Manual. Three
specifications are used in this calculation and are given in Table 11. It is essential that all three specifications are
included in the calculations to determine the sample points, as incorrect settings can result in errors and
unpredictable beh avior. For more information, see the MPC7450 RISC Micr oprocessor Family User’s Manual.
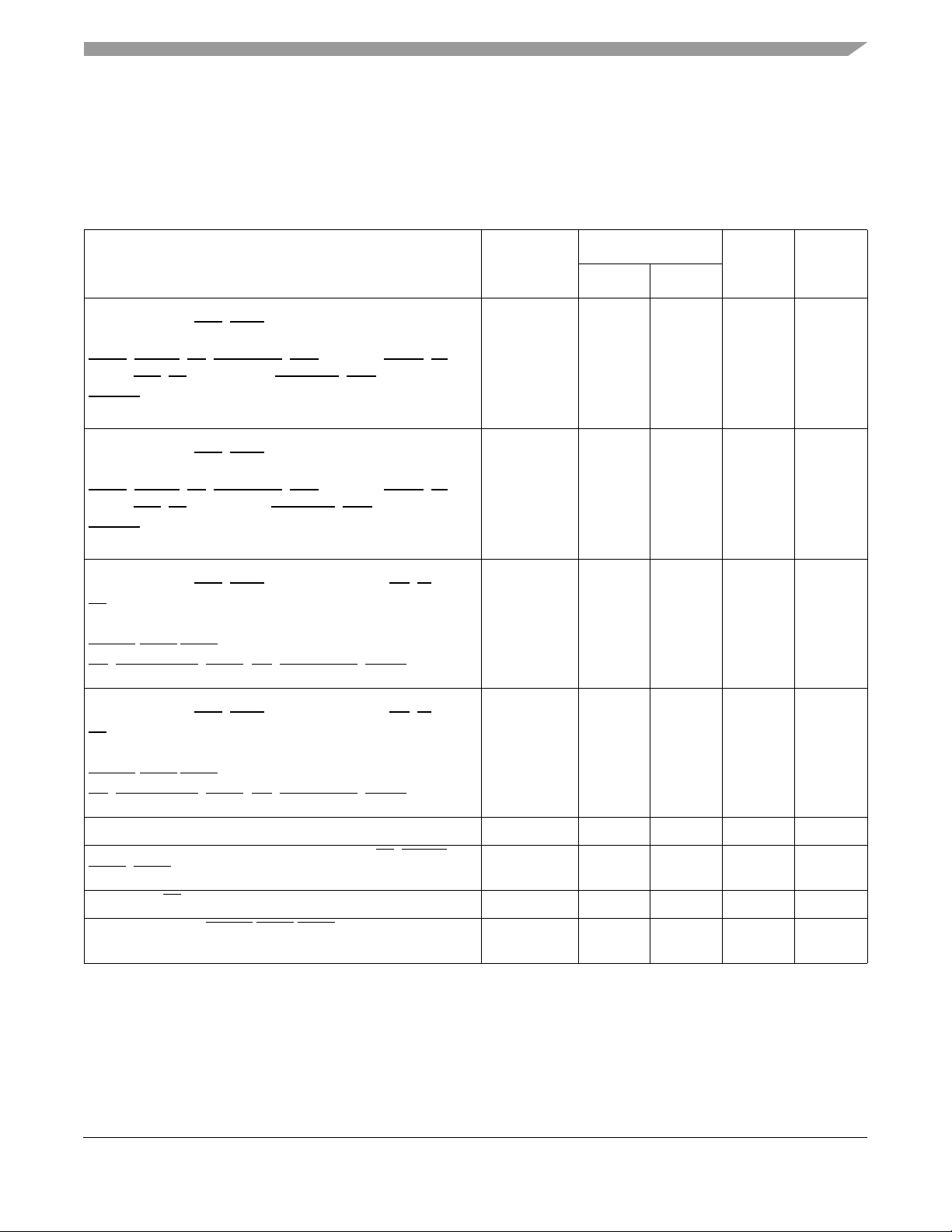
Table 11. Sample Points Calculation Parameters
Parameter Symbol Max Unit Notes
Delay from processor clock to internal_L3_CLK t
Delay from internal_L3_CLK to L3_CLK
Delay from L3_ECHO_CLK
Notes:
1. This specification describes a logical offset between the internal clock edge used to launch the L3 address and
control signals (this clock edge is phase-aligned with the processor clock edge) and the internal clock edge used to
launch the L3_CLK
SRAM within a valid address window and provide adequate setup and hold time. This offset is reflected in the L3
bus interface AC timing specifications, but must also be separately accounted for in the calculation of sample points
and, thus, is specified here.
2. This specification is the delay from a rising or falling edge on the internal_L3_CLK signal to the corresponding rising
or falling edge at the L3CLK
3. This specification is the delay from a rising or falling edge of L3_ECHO_CLK
from the FIFO.
n
to receive latch t
n
signals. With proper board routing, this offset ensures that the L3_CLKn edge will arrive at the
n
pins.
n
output pins t
AC
CO
ECI
n
to data valid and ready to be sampled
3/4 t
3ns2
3ns3
L3_CLK
1
5.2.4.1 L3 Bus AC Specifications for DDR MSUG2 SRAMs
When using DDR MSUG2 SRAMs at the L3 interface, the parts should be connected as shown in Figure 9.
Outputs from the MPC7455 are actually launched on the edges of an internal clock phase-aligned to SYSCLK
(adjusted for core and L3 frequency divisors). L3_CLK0 and L3_CLK1 are this inter nal clock output with 90° phase
delay, so outputs are shown synchronous to L3_CLK0 and L3_CLK1. Output valid times are typically negative
when referenced to L3_CLKn because the data is launched one-quar ter period before L3_CLKn to provide adequate
setup time at the SRAM after the delay-matched address, control, data, and L3_CLKn signals have propagated
across the printed-wiring board.
Inputs to the MPC7455 are source-synchr onous with the CQ clock generated by the DDR MSUG2 SRAMs. These
CQ clocks are received on the L3_ECHO_CLKn inputs of the MPC7455. An internal circuit delays the incoming
L3_ECHO_CLKn signal such that it is positi oned withi n the valid da ta window a t the inter nal receiving latches. This
delayed clock is used to capture the data into these latches which comprise the receive FIFO. This clock is
asynchronous to all other processor cl ocks. This latched data is subs equently rea d out of the FIFO synchronou sly to
the processor clock. The time between writing and reading the data is set by the using the sample point settings
defined in the L3CR register.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
22 Freescale Semiconductor
Page 23

Electrical and Thermal Characteristics
Table 12 provides the L3 bus interface AC timing specifications for the configuration as shown in Figure 9,
assuming the timing relationships shown in Figure 10 and th e loading shown in Figure 8.
Table 12. L3 Bus Interface AC Timing Specifications for MSUG2
At recommended oper ating conditions. See Ta bl e 4 .
Parameter Symbol
L3_CLK rise
and fall time
Setup times:
Data and
parity
Input hold
times: Data
and parity
Val id times:
Data and
parity
Val id times:
All other
t
L3CR
t
L3CF
t
L3DVEH
t
L3DVEL
t
L3DXEH
t
L3DXEL
t
L3CHDV
t
L3CLDV
t
L3CH OV
outputs
Output hold
times: Data
t
L3CHDX
t
L3CLDX,
and parity
Output hold
times: All
t
L3CH OXtL3_CLK
other outputs
All Speed Grades
L3OH0 = 0, L3OH1 = 0 L3OH0 = 0, L3OH1 =1 L3OH0 = 1, L3OH1 = 0 L3OH0 = 1, L3OH1 = 1
8
Unit Notes
Min Max Min Max Min Max Min Max
,
—1.0—1.0—1.0—1.0ns1
,
– 0.1 — – 0.1 — – 0.1 — – 0.1 — ns 2, 3,
,
t
L3_CLK
+ 0.30
,
—(– t
—t
,
t
L3_CLK
– 0.40
– 0.20
/4
/4
/4
—t
/4)
L3_CLK
+ 0.60
/4
L3_CLK
+ 0.80
—t
—t
/4
L3_CLK
+ 0.30
—(– t
—t
/4
L3_CLK
– 0.60
/4
L3_CLK
– 0.40
—t
/4)
L3_CLK
+ 0.40
/4
L3_CLK
+ 0.60
—t
—t
/4
L3_CLK
+ 0.30
—(– t
—t
/4
L3_CLK
– 0.80
/4
L3_CLK
– 0.60
—t
/4)
L3_CLK
+ 0.20
/4
L3_CLK
+ 0.40
—t
—t
/4
L3_CLK
+ 0.30
—(– t
—t
/4
L3_CLK
– 1.00
/4
L3_CLK
– 0.80
—ns2, 4
/4)
L3_CLK
ns 5, 6,
+ 0.00
/4
L3_CLK
+ 0.20
ns 5, 7
—ns5, 6,
—ns5, 7
4
7
7
L3_CLK to
high
impedance:
Data and
parity
t
L3CLDZ
—t
/2 — t
L3_CLK
/2 — t
L3_CLK
/2 — t
L3_CLK
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
L3_CLK
/2 ns
Freescale Semiconductor 23
Page 24

Electrical and Thermal Characteristics
Table 12. L3 Bus Interface AC Timing Specifications for MSUG2 (continued)
At recommended oper ating conditions. See Ta bl e 4 .
+ 2.0
8
Unit Notes
/4
—t
L3_CLK
+ 2.0
/4
—ns
Parameter Symbol
L3_CLK to
high
impedance:
All other
outputs
t
L3CHOZ
All Speed Grades
L3OH0 = 0, L3OH1 = 0 L3OH0 = 0, L3OH1 =1 L3OH0 = 1, L3OH1 = 0 L3OH0 = 1, L3OH1 = 1
Min Max Min Max Min Max Min Max
—t
L3_CLK
+ 2.0
/4
—t
L3_CLK
+ 2.0
/4
t
L3_CLK
Notes:
1. Rise and fall times for the L3_CLK output are measured from 20% to 80% of GV
DD
.
2. For DDR, all input specifications are measured from the midpoint of the signal in question to the midpoint voltage of the rising
or falling edge of the input L3_ECHO_CLK
3. For DDR, the input data will typically follow the edge of L3_ECHO_CLK
n
(see Figure 10). Input timings are measured at the pins.
n
as shown in Figure 10. For consistency with other
input setup time specifications, this will be treated as negative input setup time.
4. t
/4 is one-fourth the period of L3_CLKn. This parameter indicates that the MPC7455 can latch an input signal that is
L3_CLK
valid for only a short time before and a short time after the midpoint between the rising and falling (or falling and rising) edges
of L3_ECHO_CLK
n
at any frequency.
5. All output specifications are measured from the midpoint voltage of the rising (or for DDR write data, also the falling) edge
of L3_CLK to the midpoint of the signal in question. The output timings are measured at the pins. All output timings assume
a purely resistive 50-Ω load (see Figure 8).
6. For DDR, the output data will typically lead the edge of L3_CLK
n
as shown in Figure 10. For consistency with other output
valid time specifications, this will be treated as negative output valid time.
7. t
/4 is one-fourth the period of L3_CLKn. This parameter indicates that the specified output signal is actually launched
L3_CLK
by an internal clock delayed in phase by 90°. Therefore, there is a frequency component to the output valid and output hold
times such that the specified output signal will be valid for approximately one L3_CLK period starting three-fourths of a clock
prior to the edge on which the SRAM will sample it and ending one-fourth of a clock period after the edge it will be sampled.
8. These configuration bits allow the AC timing of the L3 interface to be altered via software. L3OH0 = L2CR[12],
L30H1 = L3CR[12]. Revisions of the MPC7455 not described by this document may implement these bits differently. See
Section 11.1, “Part Numbers Fully Addressed by This Document,” and Section 11.2, “Part Numbers Not Fully Addressed by
This Document,” for more information on which devices are addressed by this document.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
24 Freescale Semiconductor
Page 25
Electrical and Thermal Characteristics
Figure 9 shows the typical connection diagram for the MPC7455 interfaced to MSUG2 SRAMs such as the
Free scal e MCM64E836.
MPC7455
Denotes
Denotes
Receive (SRAM
Receive (SRAM
to MPC7455)
to MPC7455)
Aligned Signals
Aligned Signals
Denotes
Transmit
(MPC7455 to
SRAM)
Aligned Signals
L3ADDR[17:0]
L3_CNTL
L3_CNTL[1]
L3_ECHO_CLK[0]
{L3DATA[0:15],
L3_CLK[0]
{L3DATA[16:31],
L3_ECHO_CLK[1]
L3ECHO_CLK[2]
{L3_DATA[32:47],
L3_CLK[1]
{L3DATA[48:63],
L3_ECHO_CLK[3]
[0]
L3DP[0:1]}
L3DP[2:3]}
L3DP[4:5]}
L3DP[6:7]}
SRAM 0
SA[17:0]
B1
B2
CQ
D[0:17]
CK
D[18:35]
CQ
SRAM 1
SA[17:0]
B1
B2
CQ
D[0:17]
CK
D[18:35]
CQ
B3
LBO
CQ
CQ
CK
B3
LBO
CQ
CQ
CK
G
G
GND
GND
GND
NC
NC
GV
DD
GND
GND
GND
NC
NC
GVDD/2
/2
1
1
Note:
1. Or as recommended by SRAM manufacturer for single-ended clocking.
Figure 9. Typical Source Synchronous 2-Mbyte L3 Cache DDR Interface
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 25
Page 26

Electrical and Thermal Characteristics
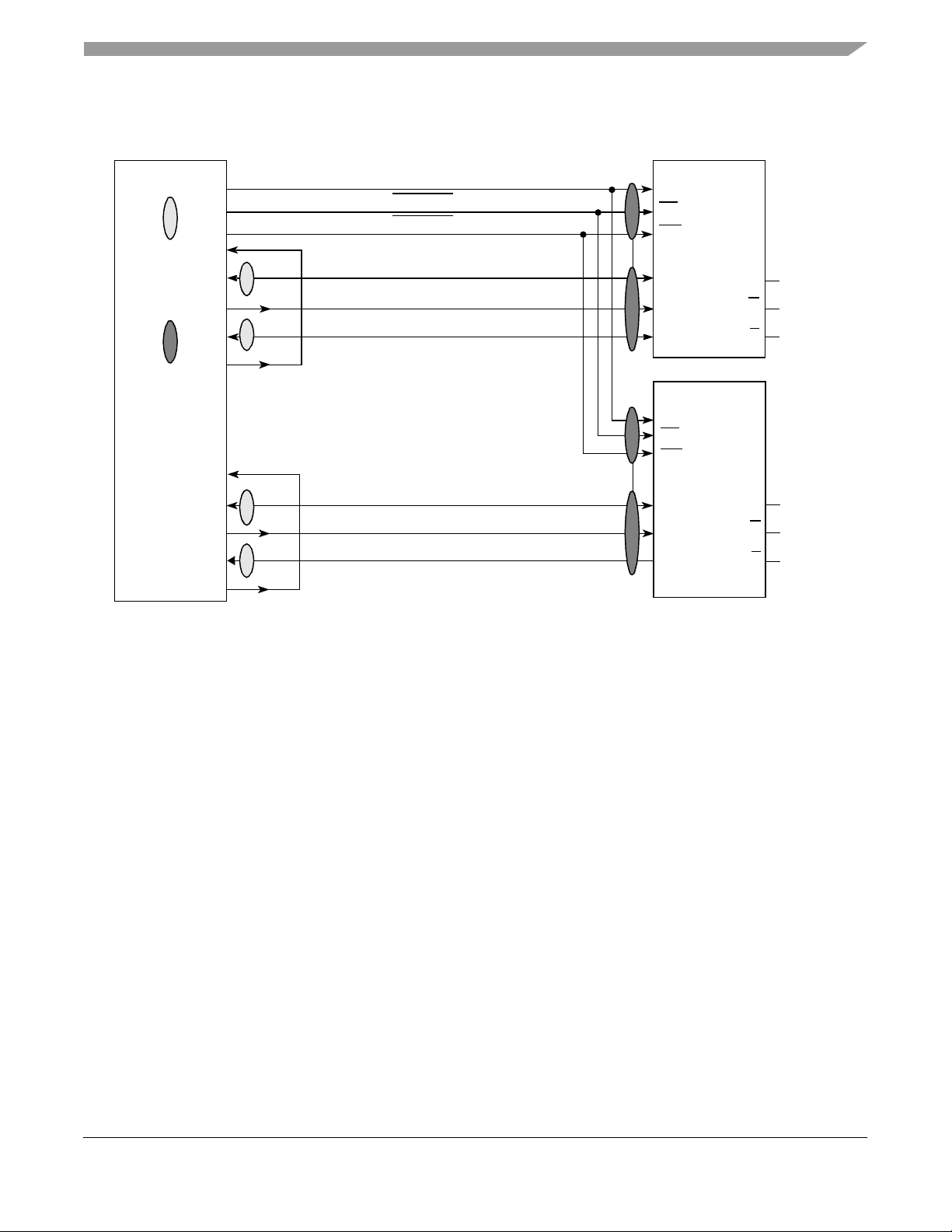
Figure 10 shows the L3 bus timing diagrams for the MPC7455 interfaced to MSUG2 SRAMs.
Outputs
L3_CLK[0,1]
ADDR, L3CNTL
L3DATA WRITE
Note: t
L3CHDV
and t
L3CLDV
time before the clock edge.
Inputs
L3_ECHO_CLK[0,1,2,3]
L3 Data and Data
Parity Inputs
Note: t
L3DVEH
and t
L3DVEL
time after the clock edge.
Figure 10. L3 Bus Timing Diagrams for L3 Cache DDR SRAMs
VM
t
L3CHOV
t
L3CHDV
t
L3CHDX
VM
t
L3CHOZ
t
L3CHOX
VM VM VM
t
L3CLDV
t
L3CLDZ
t
L3CLDX
VM = Midpoint Voltage (GVDD/2)
as drawn here will be negative numbers, that is, output valid time will be
VM
t
t
L3DVEH
t
L3DXEH
L3DVEL
VM = Midpoint Voltage (GV
VM
DD
/2)
VM VMVM
t
L3DXEL
as drawn here will be negative numbers, that is, input setup time will be
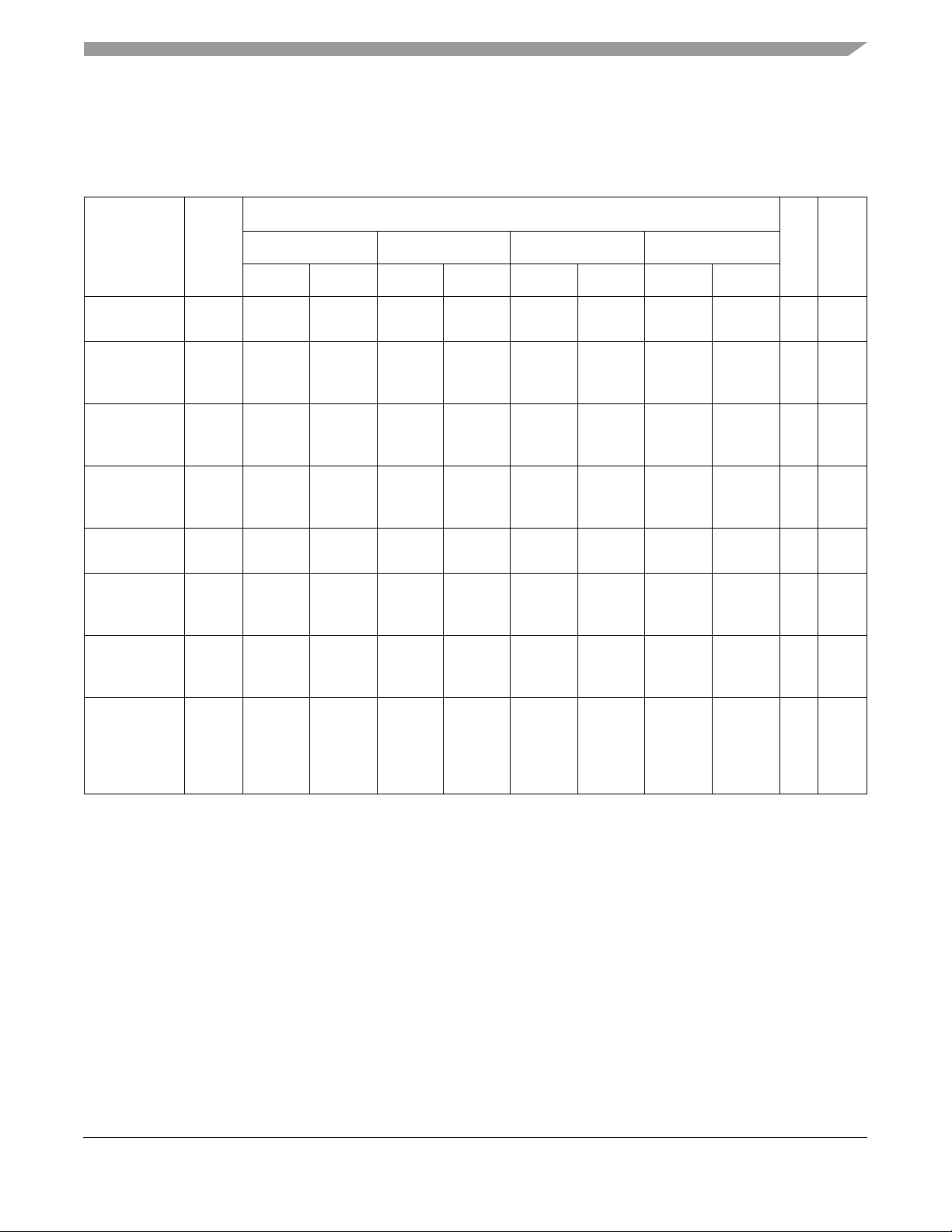
5.2.4.2 L3 Bus AC Specifications for PB2 and Late Write SRAMs
When using PB2 or late write SRAMs at the L3 interface, the parts should be connected as shown in Figure 11.
These SRAMs are synchronous to the MPC7455; one L3_CLKn signal is output to each SRAM to latch address,
control, and writ e data. Rea d data is launched by the S RAM synchronous to the delayed L3_C LKn signal it received.
The MPC7455 needs a copy of that delayed clock which launched the SRAM read data to know when the returning
data will be valid. Therefore, L3_ECHO_CLK1 and L3_ECHO_CLK3 must be routed halfway to the SRAMs and
then returned to the MPC7455 inputs L3_ECHO_CLK0 and L3_ECHO_CLK2, respectively. Thus,
L3_ECHO_CLK0 and L3_ECHO_CLK2 are phase-aligned with the input clock received at the SRAMs. The
MPC7455 will latch the incoming data on the ris ing edge of L3_ECHO_CLK0 and L3_ECHO_CLK2.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
26 Freescale Semiconductor
Page 27
Electrical and Thermal Characteristics
Table 13 provides the L3 bus inter face AC ti ming speci ficatio ns for the c onfigurat ion shown in Figure 11, assuming
the timing relationships of Figure 12 and the loading of Figure 8.
Table 13. L3 Bus Interface AC Timing Specifications for PB2 and Late Write SRAMs
At recommended oper ating conditions. See Ta bl e 4 .
Parameter Symbol
L3_CLK rise
and fall time
Setup times:
t
Data and
parity
Input hold
t
times: Data
and parity
Vali d times:
t
Data and
parity
Vali d t imes: All
t
L3CHOV
other outputs
Output hold
t
times: Data
and parity
Output hold
t
L3CHOXtL3_CLK
times: All other
outputs
L3OH0 = 0, L3OH1 = 0 L3OH0 = 0, L3OH1 =1 L3OH0 = 1, L3OH1 = 0 L3OH0 = 1, L3OH1 = 1
Min Max Min Max Min Max Min Max
t
,
L3CR
t
L3CF
L3DVEH
L3DXEH
L3CHDV
— 1.0 — 1.0 — 1.0 — 1.0 ns 1, 5
1.5 — 1.5 — 1.5 — 1.5 — ns 2, 5
— 0.5 — 0.5 — 0.5 — 0.5 ns 2, 5
—t
—t
L3CHDXtL3_CLK
– 0.40
– 0.40
/4
/4
/4
L3_CLK
+ 1.00
/4
L3_CLK
+ 1.00
—t
—t
—t
—t
/4
L3_CLK
– 0.60
/4
L3_CLK
– 0.60
All Speed Grades
/4
L3_CLK
—t
+ 0.80
/4
L3_CLK
—t
+ 0.80
—t
L3_CLK
– 0.80
—t
L3_CLK
– 0.80
6
L3_CLK
L3_CLK
/4
/4
/4
+ 0.60
/4
+ 0.60
—t
—t
—t
—t
/4
L3_CLK
– 1.00
/4
L3_CLK
– 1.00
Unit Notes
/4
L3_CLK
ns 3, 4, 5
+ 0.40
/4
L3_CLK
ns 4
+ 0.40
— ns 3, 4, 5
—ns4, 5
L3_CLK to
t
L3CHDZ
— 2.0 — 2.0 — 2.0 — 2.0 ns 5
high
impedance:
Data and
parity
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 27
Page 28

Electrical and Thermal Characteristics
Table 13. L3 Bus Interface AC Timing Specifications for PB2 and Late Write SRAMs (continued)
At recommended oper ating conditions. See Ta bl e 4 .
6
Unit Notes
Parameter Symbol
L3_CLK to
t
L3CHOZ
All Speed Grades
L3OH0 = 0, L3OH1 = 0 L3OH0 = 0, L3OH1 =1 L3OH0 = 1, L3OH1 = 0 L3OH0 = 1, L3OH1 = 1
Min Max Min Max Min Max Min Max
— 2.0 — 2.0 — 2.0 — 2.0 ns 5
high
impedance: All
other outputs
Notes:
1. Rise and fall times for the L3_CLK output are measured from 20% to 80% of GV
DD
.
2. All input specifications are measured from the midpoint of the signal in question to the midpoint voltage of the rising edge of
the input L3_ECHO_CLK
3. All output specifications are measured from the midpoint voltage of the rising edge of L3_CLK
n
(see Figure 10). Input timings are measured at the pins.
n
to the midpoint of the signal
in question. The output timings are measured at the pins. All output timings assume a purely resistive 50-Ω load (see
Figure 10).
4. t
/4 is one-fourth the period of L3_CLKn. This parameter indicates that the specified output signal is actually launched
L3_CLK
by an internal clock delayed in phase by 90°. Therefore, there is a frequency component to the output valid and output hold
times such that the specified output signal will be valid for approximately one L3_CLK period starting three-fourths of a clock
prior to the edge on which the SRAM will sample it and ending one-fourth of a clock period after the edge it will be sampled.
5. Timing behavior and characterization are currently being evaluated.
6. These configuration bits allow the AC timing of the L3 interface to be altered via software. L3OH0 = L2CR[12],
L30H1 = L3CR[12]. Revisions of the MPC7455 not described by this document may implement these bits differently. See
Section 11.1, “Part Numbers Fully Addressed by This Document,” and Section 11.2, “Part Numbers Not Fully Addressed by
This Document,” for more information on which devices are addressed by this document.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
28 Freescale Semiconductor
Page 29
Electrical and Thermal Characteristics
Figure 11 shows the typical connection diagram for the MPC7455 interfaced to PB2 SRAMs, such as the Freescale
MCM63R737, or late write SRAMs, such as the Freescal e MCM63R836A.
MPC7455
L3_ADDR[16:0]
L3_CNTL
[0]
L3_CNTL[1]
Denotes
Receive (SRAM
L3_ECHO_CLK[0]
{L3_DATA[0:15],
L3_DP[0:1]}
to MPC7455)
Aligned Signals
Denotes
{L3_DATA[16:31],
L3_ECHO_CLK[1]
L3_CLK[0]
L3_DP[2:3]}
Trans mit
(MPC7455 to
SRAM)
Aligned Signals
L3_ECHO_CLK[2]
{L3_DATA[32:47],
L3_DP[4:5]}
L3_CLK[1]
{L3_DATA[48:63],
L3_DP[6:7]}
L3_ECHO_CLK[3]
Note:
1. Or as recommended by SRAM manufacturer for single-ended clocking.
Figure 11. Typical Synchronous 1-MByte L3 Cache Late Write or PB2 Interface
SRAM 0
SA[16:0]
SS
SW
DQ[0:17]
K
DQ[18:36
SRAM 1
SA[16:0]
SS
SW
DQ[0:17]
K
DQ[18:36
GND
ZZ
G
GND
1
1
ZZ
K
G
K
GVDD/2
GND
GND
GVDD/2
]
]
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 29
Page 30
Electrical and Thermal Characteristics
Figure 12 shows the L3 bus timing diagrams for the MPC7455 interfaced to PB2 or late write SRAMs.
Outputs
L3_CLK[0,1]
L3_ECHO_CLK[1,3]
ADDR, L3_CNTL
L3DATA WRITE
Inputs
L3_ECHO_CLK[0,2]
Parity Inputs
L3 Data and Data
Figure 12. L3 Bus Timing Diagrams for Late Write or PB2 SRAMs
t
L3CHOV
t
L3CHDV
VM
VM = Midpoint Voltage (GV
VM
VM
t
L3DVEH
DD
t
L3CHOX
t
L3CHOZ
t
L3CHDX
t
L3CHDZ
t
L3DXEH
/2)
5.2.5 IEEE 1149.1 AC Timing Specifications
Table 14 provides the IEEE 1149.1 ( JTAG) AC timing specifications as defined in Figure 14 through Figure 17.
Table 14. JTAG AC Timing Specifications (Independent of SYSCLK)
At recommended oper ating conditions. See Ta bl e 4 .
Parameter Symbol Min Max Unit Notes
TCK frequency of operation f
TCK cycle time t
TCK clock pulse width measured at 1.4 V t
TCK rise and fall times t
TRST
assert time t
Input setup times:
Boundary-scan data
TMS, TDI
Input hold times:
Boundary-scan data
TMS, TDI
JR
TCLK
TCLK
JHJL
and t
TRST
t
DVJH
t
IVJH
t
DXJH
t
IXJH
0 33.3 MHz
30 — ns
15 — ns
JF
02ns
25 — ns 2
4
0
20
25
—
—
—
—
1
ns 3
ns 3
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
30 Freescale Semiconductor
Page 31
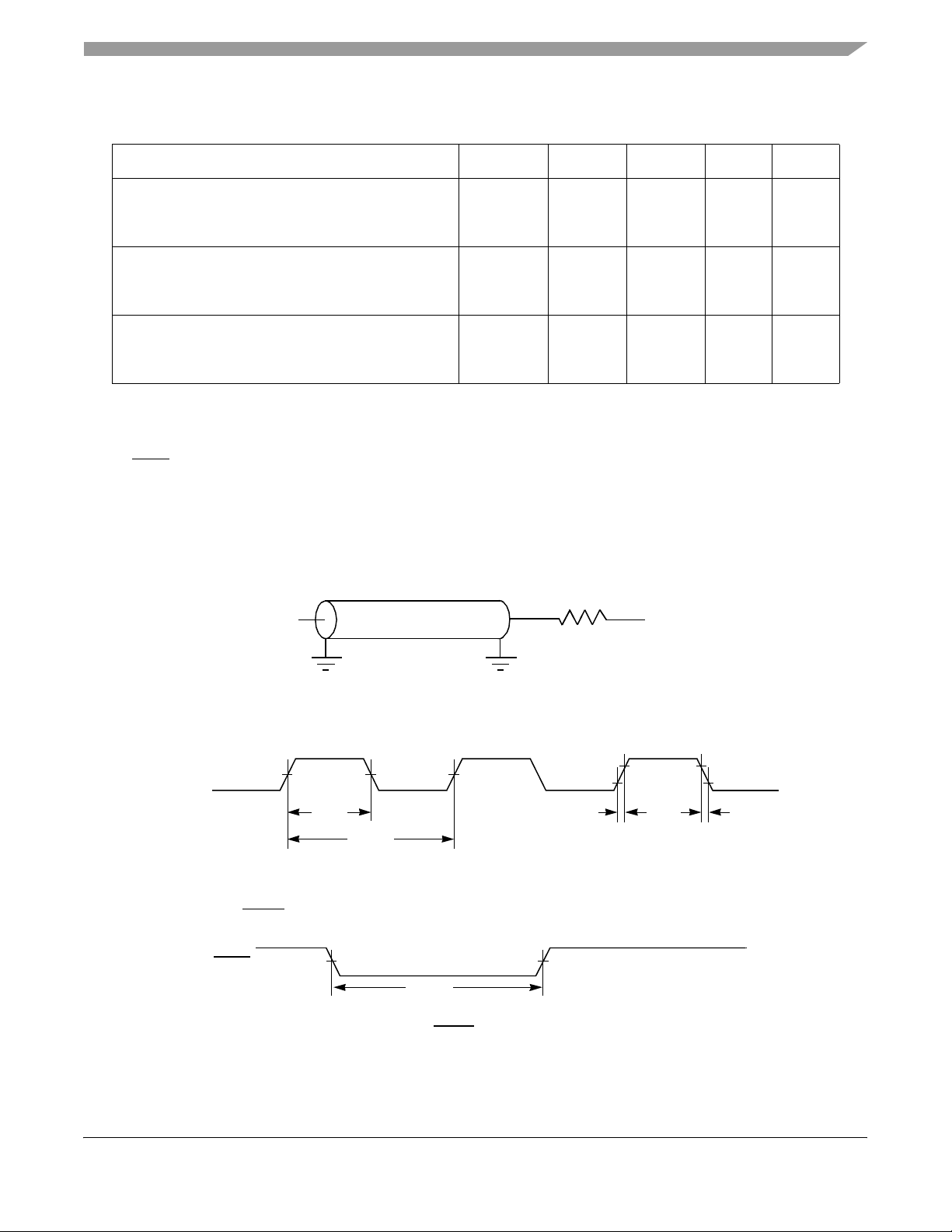
Table 14. JTAG AC Timing Specifications (Independent of SYSCLK) 1 (continued)
At recommended oper ating conditions. See Ta bl e 4 .
Parameter Symbol Min Max Unit Notes
Electrical and Thermal Characteristics
Valid times:
Boundary-scan data
TDO
Output hold times:
Boundary-scan data
TDO
TCK to output high impedance:
Boundary-scan data
TDO
t
JLDV
t
JLOV
t
JLDX
t
JLOX
t
JLDZ
t
JLOZ
4
4
TBD
TBD
3
3
20
25
TBD
TBD
19
9
ns 4
ns 4
ns 4, 5
Notes:
1. All outputs are measured from the midpoint voltage of the falling/rising edge of TCLK to the midpoint of the signal
in question. The output timings are measured at the pins. All output timings assume a purely resistive 50-Ω load
(see Figure 13). Time-of-flight delays must be added for trace lengths, vias, and connectors in the system.
2. TRST
is an asynchronous level sensitive signal. The setup time is for test purposes only.
3. Non-JTAG signal input timing with respect to TCK.
4. Non-JTAG signal output timing with respect to TCK.
5. Guaranteed by design and characterization.
Figure 13 provides the AC test load for TDO and the boundary-scan outputs of the MPC7455.
Output
Z0 = 50 Ω
R
= 50 Ω
L
OVDD/2
Figure 13. Alternate AC Test Load for the JTAG Interface
Figure 14 provides the JTAG clock input timing diagram.
TCLK
t
JHJL
t
TCLK
VM = Midpoint Voltage (OV
Figure 14. JTAG Clock Input Timing Diagram
VMVMVM
Figure 15 provides the TRST timing diagram.
TRST
VM
t
TRST
VM = Midpoint Voltage (OVDD/2)
Figure 15. TRST Timing Diagram
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
DD
VM
/2)
t
JR
t
JF
Freescale Semiconductor 31
Page 32

Electrical and Thermal Characteristics
Figure 16 provides the boundary-scan timing diagram.
VMTCK
Boundary
Data Inputs
t
JLDV
t
JLDX
Boundary
Data Outputs
t
JLDZ
Boundary
Data Outputs
Output Data Valid
VM = Midpoint Voltage (OV
Figure 16. Boundary-Scan Timing Diagram
Figure 17 provides the test access port timing diagram.
TCK
TDI, TMS
VM
t
JLOX
t
JLOV
t
IVJH
t
DVJH
DD
/2)
VM
Input
Data Valid
Output Data Valid
VM
Input
Data Valid
t
IXJH
t
DXJH
TDO
t
JLOZ
Output Data Valid
TDO Output Data Valid
VM
= Midpoint Voltage (OV
DD
/2)
Figure 17. Test Access Port Timing Diagram
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
32 Freescale Semiconductor
Page 33

Pin Assignments
6 Pin Assignments
Figure 18 (in Part A) shows the pinout of the MPC7445, 360 CBGA package as vi ewed fr om the top surface. Par t B
shows the side profile of the CBGA package to indicate the direction of the top surface view.
Part A
12 3 4 5 6 78 910111213141516
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
U
V
W
Not to Scale
17 18 19
Part B
Substrate Assembly
Encapsulant
View
Die
Figure 18. Pinout of the MPC7445, 360 CBGA Package as Viewed from the Top Surface
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 33
Page 34

Pin Assignments
Figure 19 (in Part A) shows the pinout of the MPC7455, 483 CBGA package as vi ewed fr om the top surface. Par t B
shows the side profile of the CBGA package to indicate the direction of the top surface view.
Part A
1 2 3 4 5 6 7 8 9 10111213141516
A
B
C
D
E
F
G
H
J
K
L
M
N
P
R
T
U
V
W
17 18 19
20 21 22
Y
AA
AB
Not to Scale
Part B
Substrate Assembly
Encapsulant
View
Die
Figure 19. Pinout of the MPC7455, 483 CBGA Package as Viewed from the Top Surface
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
34 Freescale Semiconductor
Page 35

Pinout Listings
7 Pinout Listings
Table 15 provides the pinout listing for the MPC7445, 360 CBGA package. Table 16 provides the pinout lis ting for
the MPC7455, 483 CBGA package.
NOTE
This pinout is not compatible with the MPC750, MPC7400, or MPC7410, 360
BGA package.
Table 15. Pinout Listing for the MPC7445, 360 CBGA Package
Signal Name Pin Number Active I/O I/F Select
A[0:35] E11, H1, C11, G3, F10, L2, D11, D1, C10,
G2, D12, L3, G4, T2, F4, V1, J4, R2, K5,
W2, J2, K4, N4, J3, M5, P5, N3, T1, V2,
U1, N5, W1, B12, C4, G10, B11
AACK R1 Low Input BVSEL
AP[0:4] C1, E3, H6, F5, G7 High I/O BVSEL
ARTRY N2 Low I/O BVSEL 8
AV
DD
BG M1 Low Input BVSEL
BMODE0 G9 Low Input BVSEL 5
BMODE1 F8 Low Input BVSEL 6
BR D2 Low Output BVSEL
BVSEL B7 High Input BVSEL 1, 7
CI J1 Low Output BVSEL 8
CKSTP_IN A3 Low Input BVSEL
CKSTP_OUT B1 Low Output BVSEL
A8 — Input N/A
High I/O BVSEL 11
1
Notes
CLK_OUT H2 High Output BVSEL
D[0:63] R15, W15, T14, V16, W16, T15, U15,
P14, V13, W13, T13, P13, U14, W14,
R12, T12, W12, V12, N11, N10, R11, U11,
W11, T11, R10, N9, P10, U10, R9, W10,
U9, V9, W5, U6, T5, U5, W7, R6, P7, V6,
P17, R19, V18, R18, V19, T19, U19, W19,
U18, W17, W18, T16, T18, T17, W3, V17,
U4, U8, U7, R7, P6, R8, W8, T8
DBG M2 Low Input BVSEL
DP[0:7] T3, W4, T4, W9, M6, V3, N8, W6 High I/O BVSEL
DRDY R3 Low Output BVSEL 4
DTI[0:3] G1, K1, P1, N1 High Input BVSEL 13
EXT_QUAL A11 High Input BVSEL 9
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 35
High I/O BVSEL
Page 36

Pinout Listings
Table 15. Pinout Listing for the MPC7445, 360 CBGA Package (continued)
Signal Name Pin Number Active I/O I/F Select
1
Notes
GBL E2 Low I/O BVSEL
GND B5, C3, D6, D13, E17, F3, G17, H4, H7,
—— N/A
H9, H11, H13, J6, J8, J10, J12, K7, K3,
K9, K11, K13, L6, L8, L10, L12, M4, M7,
M9, M11, M13, N7, P3, P9, P12, R5, R14,
R17, T7, T10, U3, U13, U17, V5, V8, V11,
V15
HIT B2 Low Output BVSEL 4
HRESET D8 Low Input BVSEL
INT D4 Low Input BVSEL
L1_TSTCLK G8 High Input BVSEL 9
L2_TSTCLK B3 High Input BVSEL 12
No Connect A6, A13, A14, A15, A16, A17, A18, A19,
—— — 3
B13, B14, B15, B16, B17, B18, B19, C13,
C14, C15, C16, C17, C18, C19, D14, D15,
D16, D17, D18, D19, E12, E13, E14, E15,
E16, E19, F12, F13, F14, F15, F16, F17,
F18, F19, G11, G12, G13, G14, G15,
G16, G19, H14, H15, H16, H17, H18,
H19, J14, J15, J16, J17, J18, J19, K15,
K16, K17, K18, K19, L14, L15, L16, L17,
L18, L19, M14, M15, M16, M17, M18,
M19, N12, N13, N14, N15, N16, N17,
N18, N19, P15, P16, P18, P19
LSSD_MODE
E8 Low Input BVSEL 2, 7
MCP C9 Low Input BVSEL
OV
DD
B4, C2, C12, D5, E18, F2, G18, H3, J5,
—— N/A
K2, L5, M3, N6, P2, P8, P11, R4, R13,
R16, T6, T9, U2, U12, U16, V4, V7, V10,
V14
PLL_CFG[0:4] B8, C8, C7, D7, A7 High Input BVSEL
PMON_IN D9 Low Input BVSEL 10
PMON_OUT A9 Low Output BVSEL
QACK G5 Low Input BVSEL
QREQ P4 Low Output BVSEL
SHD[0:1] E4, H5 Low I/O BVSEL 8
SMI F9 Low Input BVSEL
SRESET A2 Low Input BVSEL
SYSCLK A10 — Input BVSEL
TA K6 Low Input BVSEL
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
36 Freescale Semiconductor
Page 37

Table 15. Pinout Listing for the MPC7445, 360 CBGA Package (continued)
Pinout Listings
Signal Name Pin Number Active I/O I/F Select
1
Notes
TBEN E1 High Input BVSEL
TBST
F11 Low Output BVSEL
TCK C6 High Input BVSEL
TDI B9 High Input BVSEL 7
TDO A4 High Output BVSEL
TEA L1 Low Input BVSEL
TEST[0:3] A12, B6, B10, E10 — Input BVSEL 2
TEST[4] D10 — Input BVSEL 9
TMS F1 High Input BVSEL 7
TRST A5 Low Input BVSEL 7, 14
TS
L4 Low I/O BVSEL 8
TSIZ[0:2] G6, F7, E7 High Output BVSEL
TT[0:4] E5, E6, F6, E9, C5 High I/O BVSEL
WT D3 Low Output BVSEL 8
V
DD
H8, H10, H12, J7, J9, J11, J13, K8, K10,
—— N/A
K12, K14, L7, L9, L11, L13, M8, M10, M12
Notes:
1. OV
2. These input signals are for factory use only and must be pulled up to OV
supplies power to the processor bus, JTAG, and all control signals; and VDD supplies power to the processor
DD
core and the PLL (after filtering to become AV
(selects 1.8 V) or to HRESET
recommended value of V
(selects 2.5 V). If used, the pulldown resistor should be less than 250 Ω. For actual
or supply voltages see Table 4.
in
). To program the I/O voltage, connect BVSEL to either GND
DD
for normal machine operation.
DD
3. These signals are for factory use only and must be left unconnected for normal machine operation.
4. Ignored in 60x bus mode.
5. This signal selects between MPX bus mode (asserted) and 60x bus mode (negated) and will be sampled at
HRESET
6. This signal must be negated during reset, by pull-up to OV
going high.
or negation by ¬HRESET (inverse of HRESET), to
DD
ensure proper operation.
7. Internal pull-up on die.
8. These pins require weak pull-up resistors (for example, 4.7 kΩ) to maintain the control signals in the negated state
after they have been actively negated and released by the MPC7445 and other bus masters.
9. These input signals are for factory use only and must be pulled down to GND for normal machine operation.
10.This pin can externally cause a performance monitor event. Counting of the event is enabled via software.
11.Unused address pins must be pulled down to GND.
12.This test signal is recommended to be tied to HRESET
; however, other configurations will not adversely affect
performance.
13.These signals must be pulled down to GND if unused, or if the MPC7445 is in 60x bus mode.
14.This signal must be asserted during reset, by pull-down to GND or assertion by HRESET
, to ensure proper
operation.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 37
Page 38

Pinout Listings
Signal Name Pin Number Active I/O I/F Select 1Notes
Table 16. Pinout Listing for the MPC7455, 483 CBGA Package
A[0:35] E10, N4, E8, N5, C8, R2, A7, M2, A6, M1,
High I/O BVSEL 11
A10, U2, N2, P8, M8, W4, N6, U6, R5, Y4, P1,
P4, R6, M7, N7, AA3, U4, W2, W1, W3, V4,
AA1, D10, J4, G10, D9
AACK U1 Low Input BVSEL
AP[0:4] L5, L6, J1, H2, G5 High I/O BVSEL
ARTRY T2 Low I/O BVSEL 8
AV
DD
B2 — Input N/A
BG R3 Low Input BVSEL
BMODE0 C6 Low Input BVSEL 5
BMODE1 C4 Low Input BVSEL 6
BR K1 Low Output BVSEL
BVSEL G6 High Input N/A 3, 7
CI R1 Low Output BVSEL 8
CKSTP_IN F3 Low Input BVSEL
CKSTP_OUT K6 Low Output BVSEL
CLK_OUT N1 High Output BVSEL
D[0:63] AB15, T14, R14, AB13, V14, U14, AB14,
High I/O BVSEL
W16, AA11, Y11, U12, W13, Y14, U13, T12,
W12, AB12, R12, AA13, AB11, Y12, V11, T11,
R11, W10, T10, W11, V10, R10, U10, AA10,
U9, V7, T8, AB4, Y6, AB7, AA6, Y8, AA7, W8,
AB10, AA16, AB16, AB17, Y18, AB18, Y16,
AA18, W14, R13, W15, AA14, V16, W6,
AA12, V6, AB9, AB6, R7, R9, AA9, AB8, W9
DBG V1 Low Input BVSEL
DP[0:7] AA2, AB3, AB2, AA8, R8, W5, U8, AB5 High I/O BVSEL
DRDY T6 Low Output BVSEL 4
DTI[0:3] P2, T5, U3, P6 High Input BVSEL 13
EXT_QUAL B9 High Input BVSEL 9
GBL M4 Low I/O BVSEL
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
38 Freescale Semiconductor
Page 39

Pinout Listings
Table 16. Pinout Listing for the MPC7455, 483 CBGA Package (continued)
Signal Name Pin Number Active I/O I/F Select 1Notes
GND A22, B1, B5, B12, B14, B16, B18, B20, C3,
—— N/A
C9, C21, D7, D13, D15, D17, D19, E2, E5,
E21, F10, F12, F14, F16, F19, G4, G7, G17,
G21, H13, H15, H19, H5, J3, J10, J12, J14,
J17, J21, K5, K9, K11, K13, K15, K19, L10,
L12, L14, L17, L21, M3, M6, M9, M11, M13,
M19, N10, N12, N14, N17, N21, P3, P9, P11,
P13, P15, P19, R17, R21, T13, T15, T19, T4,
T7, T9, U17, U21, V2, V5, V8, V12, V15, V19,
W7, W17, W21, Y3, Y9, Y13, Y15, Y20, AA5,
AA17, AB1, AB22
GV
DD
B13, B15, B17, B19, B21, D12, D14, D16,
—— N/A 15
D18, D21, E19, F13, F15, F17, F21, G19,
H12, H14, H17, H21, J19, K17, K21, L19,
M17, M21, N19, P17, P21, R15, R19, T17,
T21, U19, V17, V21, W19, Y21
HIT K2 Low Output BVSEL 4
HRESET A3 Low Input BVSEL
INT J6 Low Input BVSEL
L1_TSTCLK H4 High Input BVSEL 9
L2_TSTCLK J2 High Input BVSEL 12
L3VSEL A4 High Input N/A 3, 7
L3ADDR[17:0] F20, J16, E22, H18, G20, F22, G22, H20,
High Output L3VSEL
K16, J18, H22, J20, J22, K18, K20, L16, K22,
L18
L3_CLK[0:1] V22, C17 High Output L3VSEL
L3_CNTL[0:1] L20, L22 Low Output L3VSEL
L3DATA[0:63] AA19, AB20, U16, W18, AA20, AB21, AA21,
High I/O L3VSEL
T16, W20, U18, Y22, R16, V20, W22, T18,
U20, N18, N20, N16, N22, M16, M18, M20,
M22, R18, T20, U22, T22, R20, P18, R22,
M15, G18, D22, E20, H16, C22, F18, D20,
B22, G16, A21, G15, E17, A20, C19, C18,
A19, A18, G14, E15, C16, A17, A16, C15,
G13, C14, A14, E13, C13, G12, A13, E12,
C12
L3DP[0:7] AB19, AA22, P22, P16, C20, E16, A15, A12 High I/O L3VSEL
L3_ECHO_CLK[0,2] V18, E18 High Input L3VSEL
L3_ECHO_CLK[1,3] P20, E14 HIgh I/O L3VSEL
LSSD_MODE
MCP
F6 Low Input BVSEL 2, 7
B8 Low Input BVSEL
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 39
Page 40

Pinout Listings
Signal Name Pin Number Active I/O I/F Select 1Notes
Table 16. Pinout Listing for the MPC7455, 483 CBGA Package (continued)
No Connect A8, A11, B6, B11, C11, D11, D3, D5, E11, E7,
—— N/A 16
F2, F11, G11, G2, H11, H9, J8
OV
DD
B3, C5, C7, C10, D2, E3, E9, F5, G3, G9, H7,
—— N/A
J5, K3, L7, M5, N3, P7, R4, T3, U5, U7, U11,
U15, V3, V9, V13, Y2, Y5, Y7, Y10, Y17, Y19,
AA4, AA15
PLL_CFG[0:4] A2, F7, C2, D4, H8 High Input BVSEL
PMON_IN E6 Low Input BVSEL 10
PMON_OUT B4 Low Output BVSEL
QACK K7 Low Input BVSEL
QREQ Y1 Low Output BVSEL
SHD[0:1] L4, L8 Low I/O BVSEL 8
SMI
G8 Low Input BVSEL
SRESET G1 Low Input BVSEL
SYSCLK D6 — Input BVSEL
TA N8 Low Input BVSEL
TBEN L3 High Input BVSEL
TBST
B7 Low Output BVSEL
TCK J7 High Input BVSEL
TDI E4 High Input BVSEL 7
TDO H1 High Output BVSEL
TEA T1 Low Input BVSEL
TEST[0:5] B10, H6, H10, D8, F9, F8 — Input BVSEL 2
TEST[6] A9 — Input BVSEL 9
TMS K4 High Input BVSEL 7
TRST C1 Low Input BVSEL 7, 14
TS
P5 Low I/O BVSEL 8
TSIZ[0:2] L1,H3,D1 High Output BVSEL
TT[0:4] F1, F4, K8, A5, E1 High I/O BVSEL
WT L2 Low Output BVSEL 8
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
40 Freescale Semiconductor
Page 41

Package Description
Table 16. Pinout Listing for the MPC7455, 483 CBGA Package (continued)
Signal Name Pin Number Active I/O I/F Select 1Notes
V
DD
Notes:
1. OV
2. These input signals are for factory use only and must be pulled up to OV
3. To program the processor interface I/O voltage, connect BVSEL to either GND (selects 1.8 V) or to HRESET
4. Ignored in 60x bus mode.
5. This signal selects between MPX bus mode (asserted) and 60x bus mode (negated) and will be sampled at
6. This signal must be negated during reset, by pull-up to OV
7. Internal pull-up on die.
8. These pins require weak pull-up resistors (for example, 4.7 kΩ) to maintain the control signals in the negated state
9. These input signals for factory use only and must be pulled down to GND for normal machine operation.
10.This pin can externally cause a performance monitor event. Counting of the event is enabled via software.
11.Unused address pins must be pulled down to GND.
12.This test signal is recommended to be tied to HRESET
13.These signals must be pulled down to GND if unused or if the MPC7455 is in 60x bus mode.
14.This signal must be asserted during reset, by pull-down to GND or assertion by HRESET
15.Power must be supplied to GV
16.These signals are for factory use only and must be left unconnected for normal machine operation.
supplies power to the processor bus, JTAG, and all control signals except the L3 cache controls (L3CTL[0:1]);
DD
GV
supplies power to the L3 cache interface (L3ADDR[0:17], L3DATA[0:63], L3DP[0:7], L3_ECHO_CLK[0:3],
DD
and L3_CLK[0:1]) and the L3 control signals L3_CNTL
PLL (after filtering to become AV
2.5 V). To program the L3 interface, connect L3VSEL to either GND (selects 1.8 V) or to HRESET
or to HRESET
HRESET
ensure proper operation.
after they have been actively negated and released by the MPC7455 and other bus masters.
performance.
operation.
going high.
J9, J11, J13, J15, K10, K12, K14, L9, L11,
L13, L15, M10, M12, M14, N9, N11, N13, N15,
P10, P12, P14
[0:1]; and VDD supplies power to the processor core and the
). For actual recommended value of Vin or supply voltages, see Tab l e 4.
DD
(selects 1.5 V). If used, pulldown resistors should be less than 250 Ω.
or negation by ¬HRESET (inverse of HRESET), to
DD
; however, other configurations will not adversely affect
, even when the L3 interface is disabled or unused.
DD
—— N/A
for normal machine operation.
DD
(selects
(selects 2.5 V)
, to ensure proper
8 Package Description
The followi ng sect i on s prov ide the pa ck age p ara meters and mech an ical d imen si o ns for the CBGA packag e.
8.1 Package Parameters for the MPC7445, 360 CBGA
The pack age pa ramet ers are as pro vid ed in t he fol lowing list. The package ty pe is 2 5 × 25 mm , 360- lea d cer ami c
ball grid array (CBGA).
Package ou tlin e 2 5 × 25 mm
Interconnects 360 (19 × 19 ball array – 1)
Pitch 1.27 mm (50 mil)
Minimum module height 2.72 mm
Maximum module height 3.24 mm
Ball diameter 0.89 mm (35 mil)
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 41
Page 42

Package Description
8.2 Mechanical Dimensions for the MPC7445, 360 CBGA
Figure 20 provides the mechanical dimensions and bottom surface nomenclature for the MPC7445, 360 CBGA
package.
2X
0.2
D
B
Capacitor Region
A1 CORNER
E
2X
0.2
C
D1
1
0.15 A
A
NOTES:
1. DIMENSIONING AND TOLERANCING
PER ASME Y14.5M, 1994.
2. DIMENSIONS IN MILLIMETERS.
3. TOP SIDE A1 CORNER INDEX IS A
METALIZED FEATURE WITH VARIOUS
SHAPES. BOTTOM SIDE A1 CORNER IS
E3
DESIGNATED WITH A BALL MISSING
FROM THE ARRAY.
E2
E1
Millimeters
DIM MIN MAX
D2
12345678910111213141516
e
360X
b
0.15
17 1819
W
V
U
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
C
A
B0.3
A3
A2
A1
A
A
A 2.72 3.20
A1 0.80 1.00
A2 1.10 1.30
A3 — 0.6
b 0.82 0.93
D 25.00 BSC
D1 — 6.15
D2 12.15 12.45
e 1.27 BSC
E 25.00 BSC
E1 — 11.1
E2 7.45 —
E3 8.75 9.20
Figure 20. Mechanical Dimensions and Bottom Surface Nomenclature for the MPC7445,
360 CBGA Package
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
42 Freescale Semiconductor
Page 43
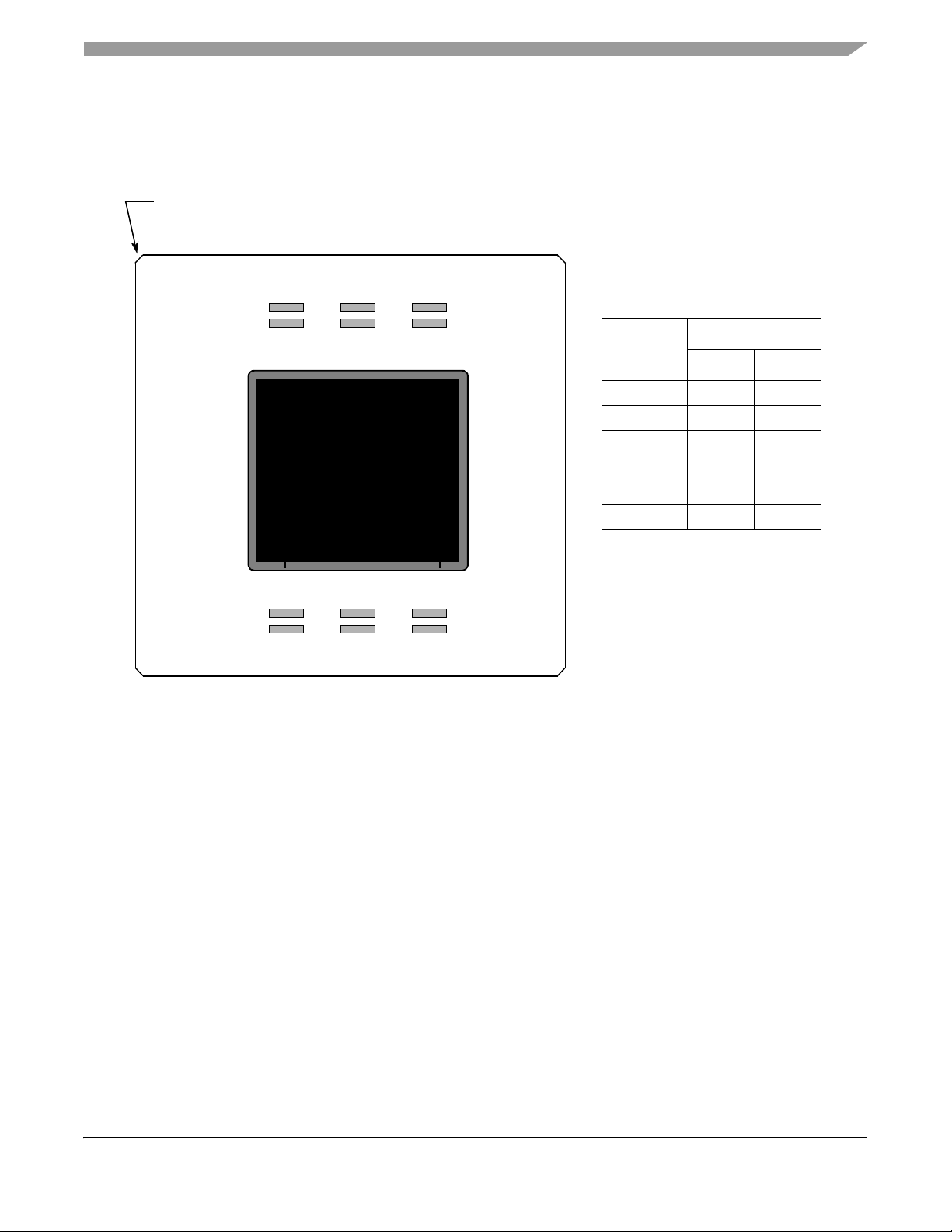
Package Description
8.3 Substrate Capacitors for the MPC7445, 360 CBGA
Figure 21 shows the connectivity of the substrate capacitor pads for the MPC7445, 360 CBGA. All capacitors are
100 nF.
A1 Corner
1
C4-2 C5-2 C6-2
C4-1
C3-2 C2-2 C1-2
C3-1
C6-1C5-1
C1-1C2-1
Capacitor
C1 OV
C2 V
C3 OV
C4 V
C5 OV
C6 V
Figure 21. Substrate Bypass Capacitors for the MPC7445, 360 CBGA
8.4 Package Parameters for the MPC7455, 483 CBGA
Pad Number
-1 -2
DD
DD
DD
DD
DD
DD
GND
GND
GND
GND
GND
GND
The package parameters are as provided in the following list. The package type is 29 × 29 mm, 483-lead ceramic
ball grid array (CBGA).
Package ou tlin e 2 9 × 29 mm
Interconnects 483 (22 × 22 ball array – 1)
Pitch 1.27 mm (50 mil)
Minimum module height —
Maximum module height 3.22 mm
Ball diameter 0.89 mm (35 mil)
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 43
Page 44

Package Description
8.5 Mechanical Dimensions for the MPC7455, 483 CBGA
Figure 22 provides the mechanical dimensions and bottom surface nomenclature for the MPC7455, 483 CBGA
package.
2X
0.2
A1 CORNER
E
E1
E3
E2
D
D1
D3
D2
1
E4
B
Capacitor Region
A
0.15 A
NOTES:
1. DIMENSIONING AND TOLERANCING
PER ASME Y14.5M, 1994.
2. DIMENSIONS IN MILLIMETERS.
3. TOP SIDE A1 CORNER INDEX IS A
METALIZED FEATURE WITH VARIOUS
SHAPES. BOTTOM SIDE. A1 CORNER
IS DESIGNATED WITH A BALL
MISSING FROM THE ARRAY.
Millimeters
2X
0.2
D4
C
12345678910111213141516
e
483X
b
0.15
1718 19
B0.3
A
20
21 22
AB
AA
Y
W
V
U
T
R
P
N
M
L
K
J
H
G
F
E
D
C
B
A
A3
A2
A1
A
CA
DIM MIN MAX
A 2.72 3.20
A1 0.80 1.00
A2 1.10 1.30
A3 -- 0.60
b 0.82 0.93
D 29.00 BSC
D1 — 11.6
D2 8.94 —
D3 — 7.1
D4 12.15 12.45
e 1.27 BSC
E 29.00 BSC
E1 — 11.6
E2 8.94 —
E3 — 6.9
E4 8.75 9.20
Figure 22. Mechanical Dimensions and Bottom Surface Nomenclature for the MPC7455,
483 CBGA Package
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
44 Freescale Semiconductor
Page 45

System Design Information
8.6 Substrate Capacitors for the MPC7455, 483 CBGA
Figure 23 shows the connectivity of the substrate capacitor pads for the MPC7455, 483 CBGA. All capacitors are
100 nF.
A1 Corner
1
Pad Number
C7-1 C8-1 C9-1
Capacitor
-1 -2
C7-2
C6-2C5-2
C4-1 C5-1 C6-1
C4-2
C3-2 C2-2 C1-2
C3-1
C9-2C8-2
C10-1C11-1
C12-2 C11-2 C10-2
C1-1C2-1
C12-1
C1 OV
C2 V
C3 OV
C4 OV
C5 V
C6 OV
C7 AV
C8 OV
C9 GV
C10 GV
C11 V
C12 GV
DD
DD
DD
DD
DD
DD
DD
DD
DD
DD
DD
DD
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
GND
Figure 23. Substrate Bypass Capacitors for the MPC7455, 483 CBGA
9 System Design Information
This section provides system and thermal design recommendations for succ essful application of the MPC7455.
9.1 PLL Configuration
The MPC7455 PLL is configured by the PLL_CFG[0:4] signals. For a given SYSCLK (bus) frequency, the PLL
configuration signals set the internal CPU and VCO frequency of operation. The PLL configuration for the
MPC7455 is shown in Table 17 for a set of ex ample fre quencies . In this ex ample, sh aded cells re present s ettings
that, for a given SYSCLK frequency, result in core and/or VCO frequencies that do not comply with the 1-GHz
column in Table 8. Note that these configurations were different in devices prior to Rev F; see Section 11.2, “Part
Numbers Not Fully Addressed by This Document,” for more information regarding documentation of prior
revisions.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 45
Page 46

System Design Information
Table 17. MPC7455 Microprocessor PLL Configuration Example for 1.0 GHz Parts
Example Bus-to-Core Frequency in MHz (VCO Frequency in MHz)
PLL_
CFG[0:4]
01000 2x 2x
10000 3x 2x
10100 4x 2x 532
10110 5x 2x
10010 5.5x 2x
11010 6x 2x
01010 6.5x 2x
00100 7x 2x
00010 7.5x 2x
Bus-to-
Core
Multiplier
Core-to-
VCO
Multiplier
33.3
MHz
50
MHz
Bus (SYSCLK) Frequency
66.6
MHz
500
(1000)
75
MHz
525
(1050)
563
(1125)
83
MHz
540
(1080)
580
(1160)
623
(1245)
100
MHz
500
(1000)
550
(1100)
600
(1200)
650
(1300)
700
(1400)
750
(1500)
(1064)
(1333)
(1466)
(1600)
(1730)
(1862)
(2000)
133
MHz
667
733
800
866
931
1000
11000 8x 2x
01100 8.5x 2x 566
01111 9x 2x 600
01110 9. 5x 2x 633
10101 10x 2x 500
(1000)
10001 10.5x 2x 525
(1050)
10011 11x 2x 550
(1100)
00000 11.5x 2x 575
(1150)
10111 12x 2 x 600
(1200)
533
(1066)
(1132)
(1200)
(1266)
667
(1333)
700
(1400)
733
(1466)
766
(532)
800
(1600)
600
(1200)
638
(1276)
675
(1350)
712
(1524)
750
(1500)
938
(1876)
825
(1650)
863
(1726)
900
(1800)
664
(1328)
706
(1412)
747
(1494)
789
(1578)
830
(1660)
872
(1744)
913
(1826)
955
(1910)
996
(1992)
800
(1600)
850
(1700)
900
(1800)
950
(1900)
1000
(2000)
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
46 Freescale Semiconductor
Page 47

System Design Information
Table 17. MPC7455 Microprocessor PLL Configuration Example for 1.0 GHz Parts (continued)
Example Bus-to-Core Frequency in MHz (VCO Frequency in MHz)
PLL_
CFG[0:4]
Bus-to-
Core
Multiplier
Core-to-
VCO
Multiplier
33.3
MHz
11111 1 2 .5x 2x 600
(1200)
01011 13x 2x 650
(1300)
11100 13.5x 2x 675
(1350)
11001 14x 2x 700
(1400)
00011 15x 2x 500
(1000)
(1500)
11011 16x 2x 533
(1066)
(1600)
00001 17x 2x 566
(1132)
(1900)
00101 18x 2x 600
(1200)
(1800)
00111 20x 2x 667
(1334)
(2000)
50
MHz
750
800
850
900
1000
Bus (SYSCLK) Frequency
66.6
MHz
833
(1666)
865
(1730)
75
MHz
938
(1876)
975
(1950)
83
MHz
900
(1800)
933
(1866)
1000
(2000)
100
MHz
133
MHz
01001 21x 2x 700
(1400)
01101 24x 2x 800
(1600)
11101 28x 2x 933
(1866)
00110 PLL bypass PLL off, SYSCLK clocks core circuitry directly
11110 PLL off PLL off , no core c lo c k i ng occurs
Notes:
1. PLL_CFG[0:4] settings not listed are reserved.
2. The sample bus-to-core frequencies shown are for reference only. Some PLL configurations may select bus, core,
or VCO frequencies which are not useful, not supported, or not tested for by the MPC7455; see Section 5.2.1,
“Clock AC Specifications,” for valid SYSCLK, core, and VCO frequencies.
3. In PLL-bypass mode, the SYSCLK input signal clocks the internal processor directly and the PLL is disabled.
However, the bus interface unit requires a 2x clock to function. Therefore, an additional signal, EXT_QUAL, must
be driven at one-half the frequency of SYSCLK and offset in phase to meet the required input setup t
time t
(see Table 9). The result will be that the processor bus frequency will be one-half SYSCLK while the
IXKH
IVKH
and hold
internal processor is clocked at SYSCLK frequency. This mode is intended for factory use and emulator tool use
only.
Note: The AC timing specifications given in this document do not apply in PLL-bypass mode.
4. In PLL-off mode, no clocking occurs inside the MPC7455 regardless of the SYSCLK input.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 47
Page 48

System Design Information
The MPC7455 generates the clock for the external L3 synchronous data SRAMs by dividing the core clock
frequency of the MPC7455. The core-to-L3 frequency divisor for the L3 PLL is selected through the L3_CLK bits
of the L3CR register. Generally, the divisor must be chosen according to the frequency supported by the external
RAMs, the frequency of the MPC745 5 core, and timing ana lysis of the cir cuit board routing . Table 18 shows various
example L3 clock frequencie s that can be obtained for a given set of core frequencies.
Table 18. Sample Core-to-L3 Frequencies
Core Frequency
(MHz)
500 250 200 167 143 125 100 83
533 266 213 178 152 133 107 89
550
600
2
650
2
666
2
700
2
733
2
800
2
867
2
933
2
1000
Notes:
1. The core and L3 frequencies are for reference only. Note that maximum L3 frequency is design dependent. Some
examples may represent core or L3 frequencies which are not useful, not supported, or not tested for the MPC7455;
see Section 5.2.3, “L3 Clock AC Specifications,” for valid L3_CLK frequencies and for more information regarding
the maximum L3 frequency. Shaded cells do not comply with Table 10.
2. These core frequencies are not supported by all speed grades; see Table 8.
÷2 ÷2.5 ÷3 ÷3.5 ÷4 ÷5 ÷6
275 220 183 157 138 110 92
300 240 200 171 150 120 100
325 260 217 186 163 130 108
333 266 222 190 167 133 111
350 280 233 200 175 140 117
367 293 244 209 183 147 122
400 320 266 230 200 160 133
433 347 289 248 217 173 145
467 373 311 266 233 187 156
500 400 333 285 250 200 166
9.2 PLL Power Supply Filtering
The AVDD power signal is provided on the MPC7455 to provide power to the clock generation PLL. To ensure
stability of the inte rnal cl ock, the power suppl ied to the AVDD input signal should be filt ered of any noise in the 500
kHz to 10 MHz resonant freque ncy range of the PLL. A circuit similar to the one shown in Figure24 using surface
mount capacitors with minimum effective series inductance (ESL) is recommended.
The circuit should be placed as close as possible to the AV
It is often possib le to route dire ctly fr om the c apacitor s to t he AVDD pin, which is o n the pe ripher y of t he 360 C BGA
footprint and very close to the periphery of the 483 CBGA footprint, without the inductance of vias.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
48 Freescale Semiconductor
pin to minimize noise coupled from nearby circuits.
DD
Page 49

System Design Information
V
DD
10 Ω
AV
2.2 µF 2.2 µF
Low ESL Surface Mount Capacitors
GND
Figure 24. PLL Power Supply Filter Circuit
DD
9.3 Decoupling Recommendations
Due to the MPC7455 dynamic power management feature, large address and data buses, and high operating
frequencies, the MPC7455 can generate transient power surges and high frequency noise in its power supply,
especially while drivi ng l ar ge capac iti ve loads. This nois e must be pre vented f rom reachin g othe r comp onents i n the
MPC7455 system, and the MPC7455 itself requires a clean, tightly regulated source of power. Therefore, it is
recommended that the system designer place at least one decoupling capacitor at each V
of the MPC7455. It is also recommended that these decoupling capacitors receive their power from separate V
OVDD/GVDD, and GND power planes in the PCB, utilizing short traces to minimize inductance.
These capacitors should have a value of 0.01 or 0.1 µF. Only ceramic surface mount technology (SMT) capacitors
should be used to minimize lead induc tance, prefe rably 0508 or 0603 o rientations whe re connectio ns are made along
the length of the part. Consistent with the recommendations of Dr. Howard Johnson in High Speed Digital Design:
A Handbook of Black Magic (Prentice Hall, 1993) and contrary to previous recommendations for decoupling
Freescale micr oprocesso rs, multip le small capa citors of equa l value a re recommende d over using mult iple value s of
capacitance.
, OVDD, and GVDD pin
DD
DD
,
In addition, it is recommended that there be se veral bulk storage capacitors dis tributed around the PCB, feeding the
, GVDD, and OVDD planes, to enable quick recharging of the smaller chip capacitors. These bulk capacitors
V
DD
should have a low equivalent se ries resist ance (ESR) rating to en sure the quick r esponse t ime necessary . They should
also be connected to the power and ground planes through two vias to minimize inductance. Suggested bulk
capacitors: 100–330 µF (AVX TPS tantalum or Sanyo OSCON).
9.4 Connection Recommendations
To ensure reliable operation, it is highly recommended to connect unused inputs to an appropriate signal level.
Unused active low i nputs should be tied to OVDD. Unused active high inputs should be connected to GND. All NC
(no-connect) sign als must remain unconnected.
Power and ground connections must be made to all external V
If the L3 interface is not used, GVDD should be connected to the OV
, OVDD, GVDD, and GND pins in the MPC7455.
DD
power plane, and L3VSEL should be
DD
connected t o BVS E L.
9.5 Output Buffer DC Impedance
The MPC7455 processor bus and L3 I/O drivers are characterized over process, voltage, and temperature. To
measure Z
is varied until the pad volta ge is OV
The output impedance is the average of two components, the resistanc es of the pull- up and pull-down de vices. When
data is held low, SW2 is closed (SW1 is open), and R
then becomes the resistance of the pull-down devices. When data is held high, SW1 is closed (SW2 is open), and
, an external resistor is connected from the chip pad to OVDD or GND. Then, the value of each resistor
0
/2 (see Figure 25).
DD
is trimmed until the voltage at the pad equals OVDD/2. R
N
N
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 49
Page 50

System Design Information
RP is trimmed unti l the vol tage at t he pad equals OVDD/2. RP then becomes the resistance of the pull-up devices. R
and RN are designed to be close to each other in value. Then, Z0 = (RP + RN)/2.
OV
DD
R
N
SW2
Data
Figure 25. Driver Impedance Measurement
Pad
R
SW1
P
OGND
P
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
50 Freescale Semiconductor
Page 51

System Design Information
Table 19 summarizes the signal impedance results. The impedance increases with junction temperature and is
relatively unaf fected by bus voltage.
Table 19. Impedance Characteristics
VDD = 1.5 V, OVDD = 1.8 V ± 5%, Tj = 5°–85°C
Impedance Processor Bus L3 Bus Unit
Z
Typical 33–42 34–42 Ω
0
Maximum 31–51 32–44 Ω
9.6 Pull-Up/Pull-Down Resistor Requirements
The MPC7455 requires high-resistive (weak: 4.7-kΩ) pull-up resistors on several control pins of the bus interface
to maintain the control signals in the negated state after they have been actively negated and released by the
MPC7455 or other bus masters. These pins are: TS, ARTRY , SHDO, and SHD1.
Some pins des ignated as being for factory test must be pulled up to OV
or down to GND to ensure proper device
DD
operation. For the MPC7445, 360 BGA, the pi ns that mus t be pulled up to OVDD are: LSSD_MODE and TEST[0:3];
the pins that must be pulled down to GND are: L1_TSTCLK and TEST[4]. For the MPC7455, 483 BGA, the pins
that must be pulled up to OV
are: LSSD_MODE and TEST[0:5]; the pins that must be pulled down are:
DD
L1_TSTCLK and TEST[6]. The CKSTP_IN signal should likewise, be pulled up through a pull-up resistor (weak
or stronger: 4.7–1 kΩ) to prevent erroneous assertions of this signal
In addition, the MPC7455 has one open-drain style output that requires a pull-up resistor (weak or stronger:
4.7–1 kΩ) if it is used by the system. This pin is CKSTP_OUT
.
If pull-down resistors are used to configure BVSEL or L3VSEL, the resistors should be less than 250 Ω (see
Table 16). Because PLL_CFG[0:4] must remain stable during normal operation, strong pull-up and pull-down
resistors (1 kΩ or less) are recommended to configure these signals in order to protect against erroneous switching
due to ground bounce, power supply noise or noise coupling.
During inactive periods on the bus, the address and transfer attributes may not be driven by any master and may,
therefore, float in the high-impedance state for relatively long periods of time. Because the MPC7455 must
continually monitor these signals for snooping, this float condition may cause excessive power draw by the input
receivers on the MPC7455 or by other receive rs in the system. These signals c an be pulled up through weak (10-kΩ)
pull-up resistors by the system, address bus driven mode enabled (see the MPC7450 RISC Microporcessor Family
Users’ Manual for more information on this mode), or they may be otherwise driven by the system during inactive
periods of the bus to avoid this additional power draw. Preliminary studies have shown the additional power draw
by the MPC7455 input receivers to be negligible and, in a ny event, none of these measures are necessary for proper
device operation. The snooped address and transfer attribute inputs are: A[0:35], AP[0:4], TT[0:4], CI
.
GBL
, WT, and
If extended addressing is not used, A[0:3] are unused and must be pulled low to GND through weak pull-down
resistors. If the MPC7455 is in 60x bus mode, DTI[0:3] must be pulled low to GND through weak pull-down
resistors.
The data bus input receivers are normally turned off when no read operation is in progress and, therefore, do not
require pull-up resistors on the bus. Other data bus receivers in the system, however, may require pull-ups, or that
those signals be otherwise driven by the system during inactive periods by the system. The data bus signals are:
D[0:63] and DP[0:7].
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 51
Page 52

System Design Information
If address or data parity is not used by the system, and the respective parity checking is disabled through HID0, the
input receivers for those pins are disabled, and those pins do not require pull-up resistors and should be left
unconnected by the system. If all parity generation is disabled through HID0, then all parity checking should also
be disabled through HID0, and all parity pins may be left unconnected by the system.
The L3 interface does not normally require pull-up resistors.
9.7 JTAG Configuration Signals
Boundary-scan testing is enabled through the JTAG interface signals. The TRST signal is optional in the IEEE
1149.1 s pecif ication, bu t is provided o n a ll proce ssors that im plement the P owerPC arch itectur e. Whil e it i s pos sible
to force the TAP controller to the reset state using only the TCK and TMS signals, more reliable power-on reset
performance will be obtained if the TRST signal is asserted during power-on reset. Because the JTAG interface is
also used for accessing the common on-chip processor (COP) function, simply tying TRST
practical.
The COP fu nctio n of these pro cessors allow s a rem ote comp uter system (ty pically, a PC with ded ica ted hard war e
and debugging softwa re) to access and control the inter nal operations of the processor. The COP interface connects
primarily through the JTAG port of the processor, with some additional status monitoring signals. The COP port
requires the ability to independently assert HRESET
or TRST in order to fully control the processor. If the target
system has independent reset sources, such as voltage monitors, watchdog timers, power supply failures, or
push-button switch es, then the COP reset signals must be merged into these signa ls with logic.
to HRESET is not
The arrangement shown in Figure 26 allows the COP port to independently assert HRESET
or TRST , whi le ens uring
that the target can drive HRESET as well. If the JTAG interface and COP header will not be used, TRST should be
tied to HRE SET through a 0-Ω isolation resistor so that it is asserted when the system reset signal (HRESET) is
asserted, en suring th at the JTAG scan chain is in itialized du ring powe r-on. While Fr eescale recom mend s that the
COP header be designed int o the system as sh own in Figure 26, if this is not possibl e, the isol ation resistor wil l allow
future access to TRST
in the case where a JTAG interface may need to be wired onto t he system i n debug si tuations .
The COP header shown in Figure26 adds many benefits—breakpoints, watchpoints, register and memory
examination/modification, and other standard debugger features are possible through this interface—and can be as
inexpensive as an unpopulat ed footprint for a header to be added when needed.
The COP interface ha s a standard heade r for connection t o the tar get system, based on the 0. 025" square-post, 0.100"
centered header assembly (often called a Berg header). The connector typically has pin 14 removed as a connector
key.
There is no standardized way to number the COP header shown in Figure 26; consequently, many different pin
numbers have been observed from emulator vendors. Some are numbered top-to-bottom then left-to-right, while
others use left- to-right then top-to-bottom, while still others number the pins counter clockwise from pin 1 (as with
an IC). Regardless of the numbering, the signal placement recommended in Figure 26 is common to all known
emulators.
The QACK
signal shown in Figure 26 is usually connected to the PCI bridge chip in a system and is a n input to the
MPC7455 informing it th at it can go into the qui escent state . Under normal op eration this occ urs during a low-power
mode selection. In order for COP to work, the MPC7455 must see thi s signal asserted (pulled down). While shown
on the COP header, not all emulator products drive this signal. If the product does not, a pull-down resistor can be
populated to assert this signal. Additionally, some emulator products implement open-drain type outputs and can
only drive QACK
when it is not being driven by the tool. Note that the pull-up and pull-down resistors on the QACK
asserted; for these tools, a pull-up re sisto r can be implemented to ensur e this signal is de -ass erted
signal are
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
52 Freescale Semiconductor
Page 53

System Design Information
n
K
n
mutually exclu sive and it is never nec essary to pop ulate both in a system. To preserve correct powe r-down operation,
QACK should be merged via logic so that it also can be driven by the PCI bridge.
From Target
Board Sources
2
1
3
4
516
7
8
9
10
11
12
KEY
13
No Pin
15
16
COP Connector
Physical Pin Out
(if any)
Key
COP Header
SRESET
HRESET
QACK
13
11
4
VDD_SENSE
6
1
5
CHKSTP_OUT
15
2
14
CHKSTP_IN
8
TMS
9
TDO
1
TDI
3
TCK
7
QACK
2
10
12
16
HRESET
SRESET
TRST
NC
NC
2 kΩ
3
0 Ω
2 kΩ
10 kΩ
10 kΩ
5
10 kΩ
10 kΩ
10 kΩ
10 kΩ
10 kΩ
10 kΩ
4
SRESET
HRESET
OV
DD
OV
DD
OV
DD
OV
DD
TRST
OV
DD
OV
DD
CHKSTP_OUT
OV
DD
OV
DD
CHKSTP_IN
TMS
TDO
TDI
TCK
QACK
OV
DD
Notes:
1. RUN/STOP
, normally found on pin 5 of the COP header, is not implemented on the MPC7455. Co
pin 5 of the COP header to OVDD with a 10-kΩ pull-up resistor.
2. Key location; pin 14 is not physically present on the COP header.
3. Component not populated. Populate only if debug tool does not drive QACK
.
4. Populate only if debug tool uses an open-drain type output and does not actively de-assert QAC
5. If the JTAG interface is implemented, connect HRESET from the target source to TRST from the
header though an AND gate to TRST
of the part. If the JTAG interface is not implemented, co
HRESET from the target source to TRST of the part through a 0-Ω isolation reisistor.
Figure 26. JTAG Interface Connection
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 53
Page 54

System Design Information
9.8 Thermal Management Information
This section provides thermal management information for the ceramic ball grid array (CBGA) package for
air-cooled applications. Proper thermal control design is primarily dependent on the system-level design—the heat
sink, airflow, and thermal interface material. To reduce the die-junction temperature, heat sinks may be attached to
the package by se veral met hods—spring c lip t o holes in the pr inted-ci rcui t board or package, a nd mounti ng clip a nd
screw a sse mb ly (s ee Figure 27); however, due to the potential large mass of the heat sink, attachment through the
printed-circuit board is suggested. If a spring clip is used, the spring force should not exceed 10 pounds.
Heat Sink
Heat Sink
Clip
Thermal Interface Material
Figure 27. Package Exploded Cross-Sectional View with Several Heat Sink Options
CBGA Package
Printed-Circuit Board
The board designer can choose between several types of heat sinks to place on the MPC7455. There are several
commercially available heat sinks for the MPC7455 provided by the following vendors:
Aavid Thermalloy 603-224-9988
80 Commercial St.
Concord, NH 03301
Internet: www.aavidthermalloy.com
Alpha Novatech 408-749-7601
473 Sapena Ct. #15
Santa Clara, CA 95054
Internet: www.alphanovatech.com
International Ele ctronic Research Corporati on (IERC) 818-842-7277
413 North Moss St.
Burbank, CA 91502
Internet: www.ctscorp.com
T yco Electronics 800-522-6752
Chip Coolers™
P.O. Box 3668
Harrisbur g, PA 17105-3668
Internet: www.chipcoolers.com
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
54 Freescale Semiconductor
Page 55
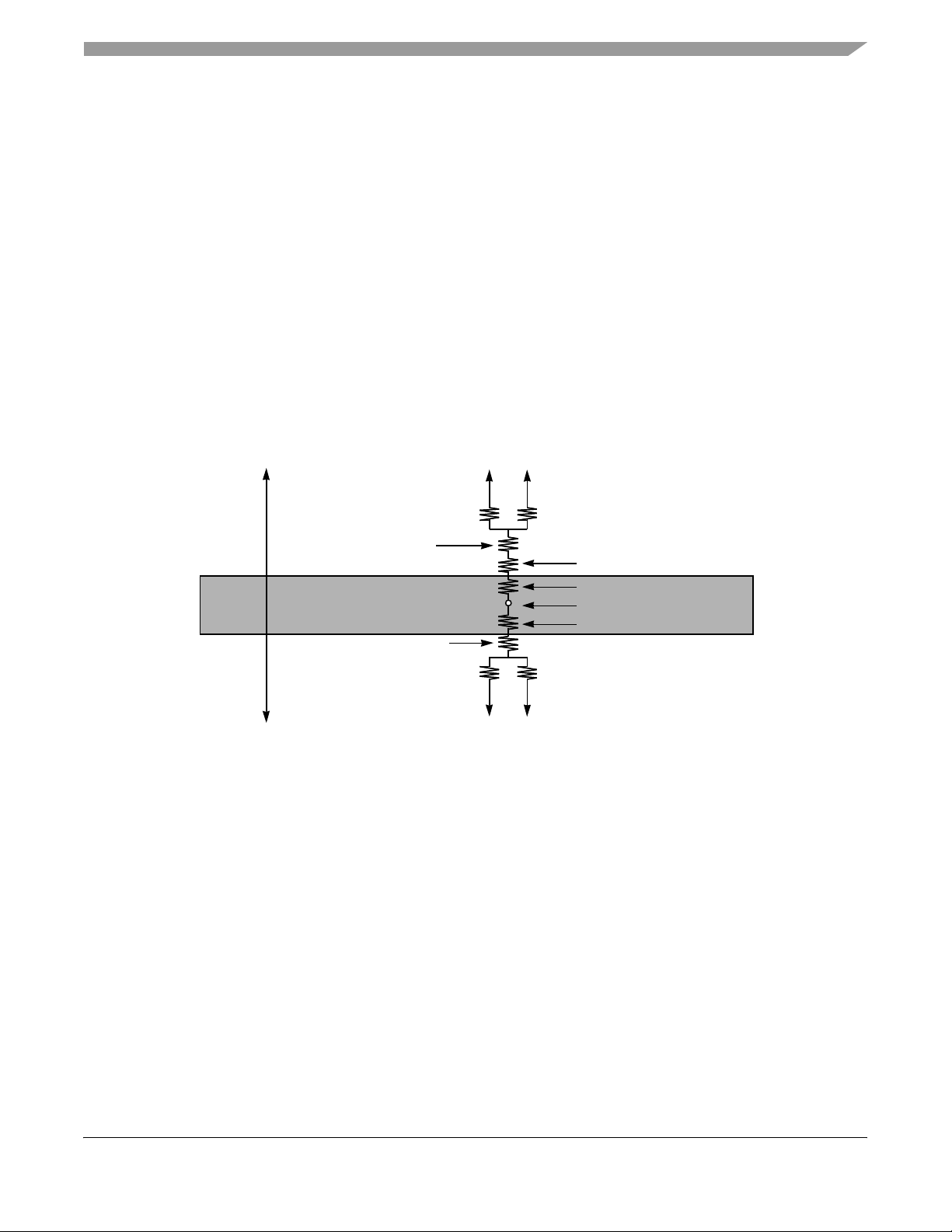
System Design Information
Wakefield Enginee ring 603-635-5102
33 Bridge St.
Pelham, NH 03076
Internet: www.wakefield.com
Ultimately, the final selection of an appropriate heat sink depends on many factors, such as thermal performance at
a given air velocity, spatial volume, mass, attachment method, assembly, and cost.
9.8.1 Internal Package Conduction Resistance
For the exposed-die packaging technology, shown in Table 3, the intrinsic conduction thermal resistance paths are
as follows:
• The die junction-to-case (actually top-of-die since silicon die is exposed) thermal resistance
• The die junction-to-ba ll thermal resistance
Figure 28 depicts the primary heat transfer path for a package with an atta ched heat sink mounted to a print ed-circuit
board.
External Resistance
Heat Sink
Internal Resistance
Printed-Circuit Board
External Resistance
(Note the internal versus external package resistance.)
Figure 28. C4 Package with Heat Sink Mounted to a Printed-Circuit Board
Radiation Convection
Thermal Interface Material
Die/Package
Die Junction
Package/Leads
Radiation Convection
Heat generated on the active side of the chip is conducted through the silicon, then through the heat sink attach
material (or thermal inte r face material), and finally to the heat sink where it is removed by forced-air convection.
Because the silicon thermal resistance is quite small, for a first-order analysis, the temperature drop in the silicon
may be neglected. Thus, the thermal interface material and the heat sink conduction/co nvective thermal resis tances
are the dominant terms.
9.8.2 Thermal Interface Materials
A thermal interface material is recommended at the package lid-to-heat sink interface to minimize the thermal
contact resistance. For those applications where the heat sink is attached by spring clip mechanism, Figure 29 shows
the thermal performanc e of three th in-sheet thermal-i nterfa ce materia ls (sili cone, graphit e/ oil, fl oroether oil) , a bare
joint, and a joint with thermal grease a s a function of contact pressure. As shown, the performance of these ther mal
interface materials improves with increasing contact pressure. The use of thermal grease significantly reduces the
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 55
Page 56
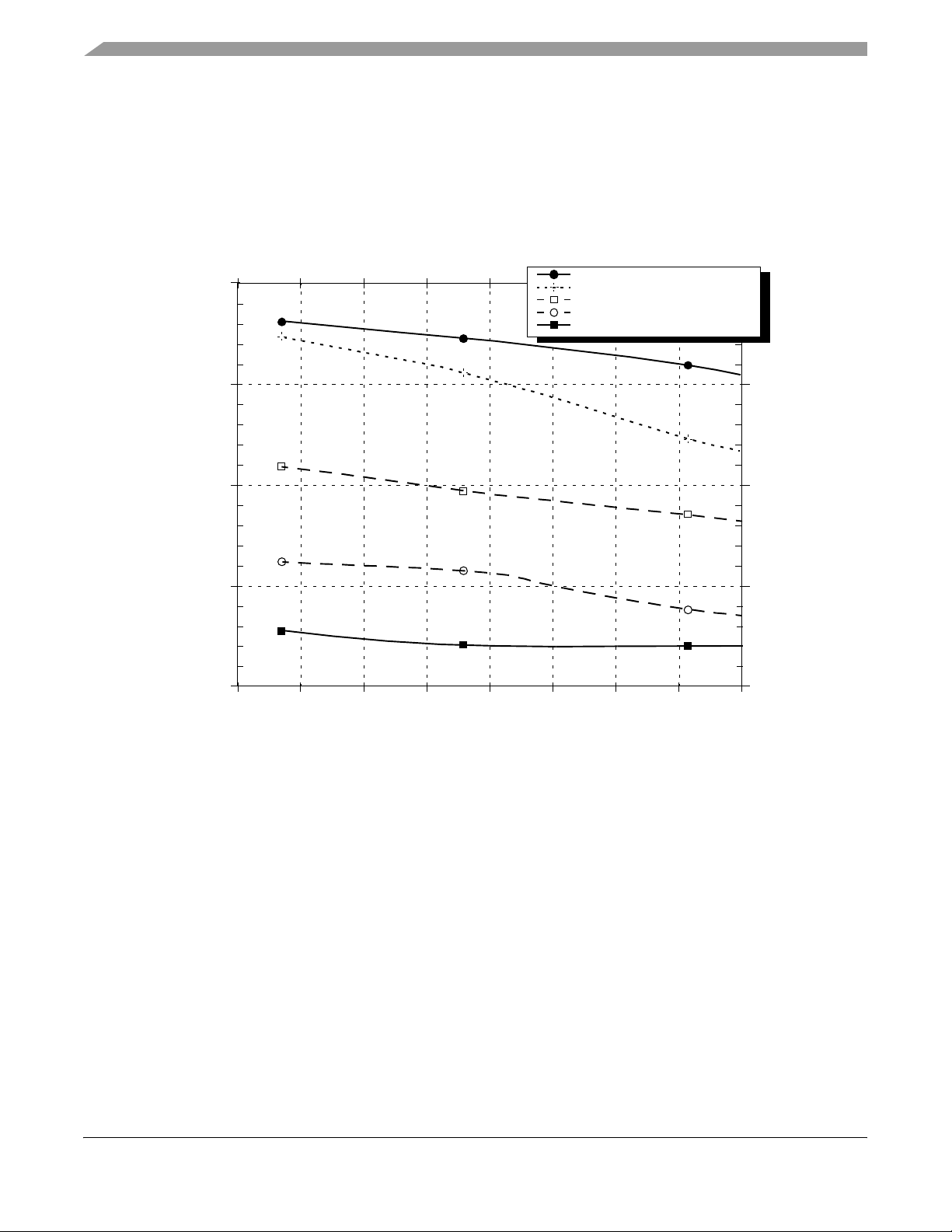
System Design Information
interface t hermal resistance. That is, the bare joint results in a thermal resi stance approximately se ven times greater
than the thermal grease joi nt.
Often, heat sinks are attached to the package by means of a spring clip to holes in the printed-circuit board (see
Figure 27). Therefore, the synthetic grease offers the best thermal performance, considering the low interface
pressure and is recommended due to the high power dissipation of the MPC7455. Of course, the selection of any
thermal inter face mate rial de pends o n many factor s—thermal performanc e requi rements , manufac turabili ty, service
temperature, dielectric properties, cost, etc.
2
1.5
/W)
2
1
0.5
Specific Thermal Resistance (K-in.
0
0 1020304050607080
Contact Pressure (psi)
Silicone Sheet (0.006 in.)
Bare Joint
Floroether Oil Sheet (0.007 in.)
Graphite/Oil Sheet (0.005 in.)
Synthetic Grease
Figure 29. Thermal Performance of Select Thermal Interface Material
The board designer can choose between several types of thermal interface. Heat sink adhesive materials should be
selected based on high conductivity, yet adequate mechanical strength to meet equipment shock/vibration
requirements. There are several commercially available thermal interfaces and adhesive materials provided by the
following vendors:
The Bergquist Company 800-347-4572
th
18930 West 78
St.
Chanhassen, MN 55317
Internet: www.bergquistcompany.com
Chomerics, Inc. 781-935-4850
77 Dragon Ct.
Woburn, MA 01888-4014
Internet: www.chomerics.com
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
56 Freescale Semiconductor
Page 57

System Design Information
Dow-Corning Corporation 800-248-2481
Dow-Corning Electronic Materials
2200 W. Salzburg Rd.
Midland, MI 48686-0997
Internet: www.dow.com
Shin-Etsu MicroSi, Inc. 888-642-7674
10028 S. 51st St.
Phoenix, AZ 85044
Internet: www.microsi.com
Thermagon Inc. 888-246-9050
4707 Detroit Ave.
Cleveland, OH 44102
Internet: www.thermagon.com
The following section provide s a heat sink selection example using one of the commerci ally available heat sinks.
9.8.3 Heat Sink Selection Example
For preliminary heat sink sizing, the die-junction temperature can be expressed as follows:
= Ta + Tr + (R
T
j
θJC
+ R
θint
+ R
θsa
) × Pd
where:
is the die-junction temper ature
T
j
is the inlet cabinet ambient temperature
T
a
is the air temperature rise within the computer cabinet
T
r
is the junction-to-ca se thermal resistance
R
θJC
is the adhesive or interface material thermal resistance
R
θint
is the heat sink base-to-ambient thermal resistance
R
θsa
is the power dissipated by the device
P
d
During operation, the die-junction temperatures (T
) should be maintained less than the value specified in Table 4.
j
The temperature of air cooling the component greatly depends on the ambient inl et air tempera ture and the ai r
temperatu re r ise w ith in the el ectro n ic cabinet. A n el ect ron i c c ab ine t inl et -air t em p era t ur e (T
to 40°C. The air temperature rise within a cabinet (T
the therm al in t e r face mate rial ( R
a CBGA pack age R
= 0.1, and a typical power consumption (Pd) of 15.0 W, the following expression for Tj is
θJC
) is typically about 1.5°C/W. For example, assuming a Ta of 30°C, a T
θint
) may be in the range of 5° to 10°C. The thermal resistance of
r
) may ran ge fro m 3 0 °
a
of 5°C,
r
obtained:
Die-junction temperature: T
For this ex ample, a R
value of 3.1°C/W or less is required to maintain the die-junction temperature below the
θsa
= 30°C + 5°C + (0.1°C/W + 1.5°C/W + R
j
) × 15 W
θsa
maximum value of Table 4.
Though the die junction- to-ambient and the heat sink-to-ambient ther mal resistances are a common fi gure-of-merit
used for comparing the thermal performance of various microelectronic packaging technologies, one should
exercise caution when only using this metric in determining thermal management because no single parameter can
adequately desc ribe thr ee-dimens ional he at flow. The final die-junction operatin g temper ature is not on ly a fu nction
of the component-level thermal resistance, but the system-level design and its operating conditions. In addition to
the component's power consumption, a number of factors affect the final operating die-junction
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 57
Page 58
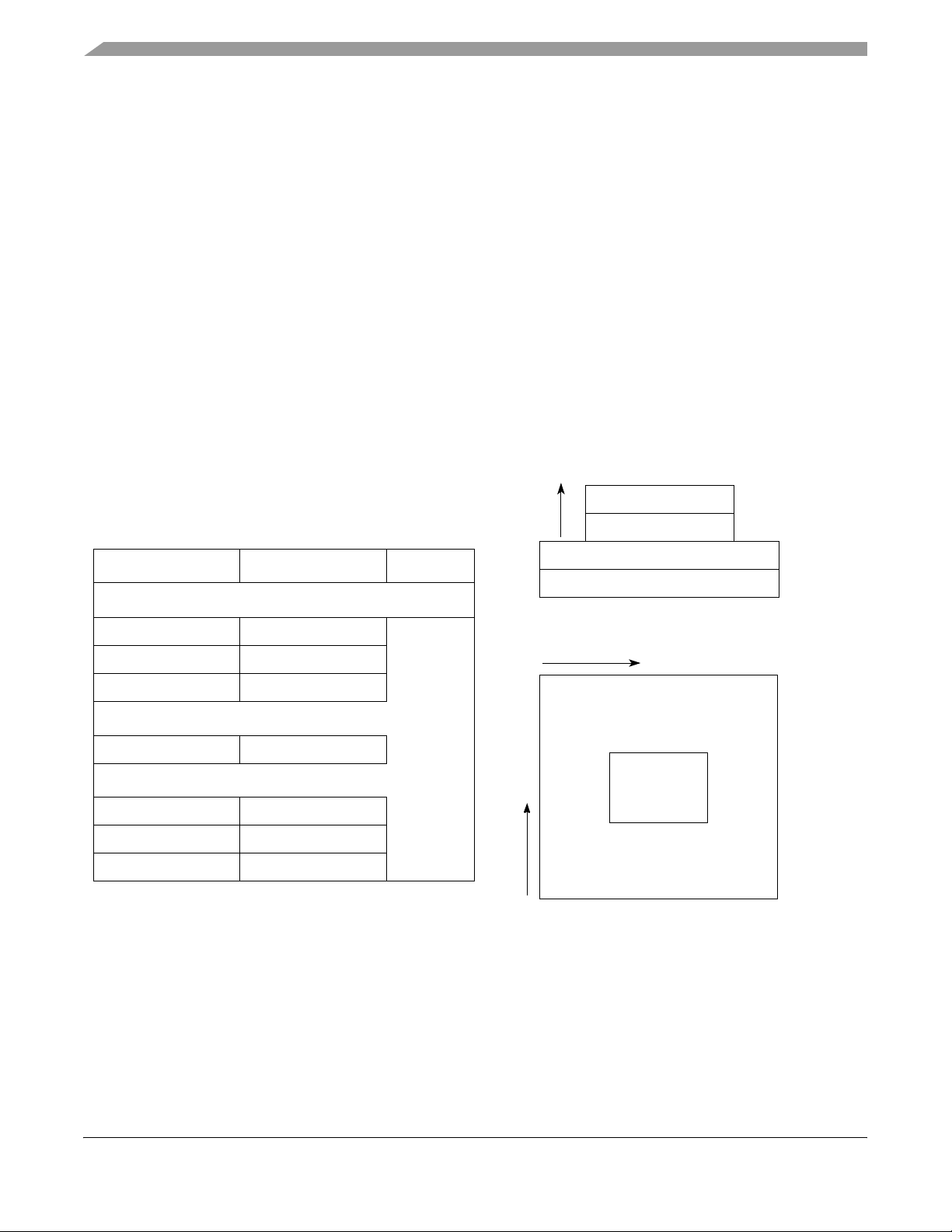
System Design Information
temperature—airflow, board population (local heat flux of adjacent components), heat sink efficiency, heat sink
attach, heat sink placement, next-level interconnect technology, system air temperature rise, altitude, etc.
Due to the complexity and the many variations of system-level boundary conditions for today's microelectronic
equipment, the combined effects of the heat transfer mechanisms (radiation, convection, and conduction) may vary
widely . For these reasons, we recommend using conjuga te heat transfe r models for the board, as well as system-level
designs.
For system thermal mode ling, the MPC7445 and MPC7455 the rmal model is shown in Figure 30. Four volumes will
be used to represent this device. Two of the volumes, solder ball, and air and substrate, are modeled using the
package outline size of the package. The other two, die, and bump and underfill, have the same size as the die.
Dimensions for these volumes for the MPC7445 and MPC7455 are given in Figure 20 and Figure 22, respectively.
The silicon die should be modeled 9.10 × 12.25 × 0.74 mm wi th th e h eat s our ce ap p li ed as a uni form source at t h e
bottom of the volume. The bump and underfill layer is modeled as 9.10 × 12.25 × 0.069 mm (or as a collapsed
volume) with ort hotropic material properties: 0.6 W/(m • K) in the xy-plane and 2 W/(m • K) in the direction of the
z-axis. The substrate volume is 25 × 25 × 1.2 mm (MPC7445) or 29 × 29 × 1.2 m m (MP C7455), and this volume
has 18 W/(m • K) isotropic conductivity. The solder ball and air layer is modeled with the same horizontal
dimensions as the substrate and is 0.9 mm thick. It can also be modeled as a collapsed volume using orthotropic
material propert ies: 0.034 W/(m • K) in the xy-plane direction and 3. 8 W/(m • K) in the direction of the z-axis.
Die
z
Bump and Underfill
Conductivity Value Unit
Bump and Underfill
k
x
k
y
k
z
Substrate
k18
Solder Ball and Air
k
x
k
y
k
z
0.6 W/(m • K)
0.6
2
0.034
0.034
3.8
Figure 30. Recommended Thermal Model of MPC7445 and MPC7455
Substrate
Solder and Air
Side View of Model (Not to Scale)
x
Substrate
Die
y
Top View of Model (Not to Scale)
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
58 Freescale Semiconductor
Page 59

10 Document Revision History
Table 20 provides a revision history for this hardware specification.
Table 20. Document Revision History
Rev. No. Substantive Change(s)
0 Initial release.
1 Updated for Rev F devices; information specific to Rev C devices is now documented in a separate part
number specifications; see Section 11.2, “Part Numbers Not Fully Addressed by This Document,” for
more information.
Removed 600 and 800 MHz speed grades.
Increased leakage current specifications in Table 6 from 10 to 30 µA.
Document Revision History
Changed core voltage to 1.3 V; all instances of V
Updated power consumption specifications in Ta bl e 7 .
Reduced I/O power guidance in Table 7 from <20% to <5%.
Added footnote 1 to Figure 9 and Figure 11.
Removed CI
Removed INT
these are asynchronous inputs.
Added TT[0:3] to Input Setup, Input Hold, Output Valid, and Output Hold lists in Table 10; these were
mistakenly omitted in Rev 0.
Updated Table 13 and Ta bl e 14 to reflect new L3 AC timing in Rev F devices.
Corrected Note 10 in Table 16 and Ta bl e 1 7; this is an event pin, not an enable pin.
Corrected entries for L3_ECHO_CLK[1,3] in Table 17; these are I/O pins, not input-only.
Added Note 16 to Table 17; all No Connect pins must be left unconnected.
Changed name of PLL_EXT to PLL_CFG[4] and updated all instances.
Updated Table 18 to reflect PLL configuration settings for Rev F devices.
Added dimensions D2 and E3 to Figure 20.
Transposed dimensions D4 and E4 in Figure 21 (dimensions were reversed).
and WT from Input Setup and Input Hold lists in Table 10; these are output-only signals.
, HRESET, MCP, SRESET, and SMI from Input Setup and Input Hold lists in Table 10;
and AVDD updated.
DD
Revised Figure 24 and Section 9.7, “JTAG Configuration Signals.”
Revised format of Section 11.2, “Part Numbers Not Fully Addressed by This Document,” and added
Table 23 through Table 26.
Revised Section 9.8.3, “Heat Sink Selection Example,” and added additional thermal modeling
information, including Figure 28.
Changed maximum heat sink clip spring force in Section 9.8, “Thermal Management Information,” from
5.5 lbs to 10 lbs.
Changed substrate marking for MPC7445 in Figure 29; all MPC744x device substrates are marked
MPC7440.
Changed substrate marking for MPC7455 in Figure 29; all MPC745x device substrates are marked
MPC7450.
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 59
Page 60

Ordering Information
Table 20. Document Revision History (continued)
Rev. No. Substantive Change(s)
1.1 Removed reference to Note 4 for DTI signals in Ta bl e 1 5 and Table 16: these signals are unused in 60x
bus mode and must be pulled down (see Note 13); they are not ignored.
Improved precision of die and package dimensions in Figure 20 and Figure 21.
2 Corrected entries in Table 17 for 33 MHz and 50 MHz bus frequencies with multipliers of 24x and higher.
Corrected typographical errors in heatsink selection example in Section 9.8.3, “Heat Sink Selection
Example.”
Removed erroneous instances of PLL_EXT signal name and changed remaining instances of
PLL_CFG[0:3] to PLL_CFG[0:4]. (These were artifacts from older revisions; see entry for Rev 1.0.)
Corrected erroneous instances (artifacts) mentioning 1.6 V core voltage. Core voltage for devices
completely covered by this revision (and revisions 1.
Corrected errors in PLL multipliers in Table 17: 32x and 25x are not supported ratios, 3x and 4x are
supported, 10.5x and 12.5x PLL settings were incorrect.
x)
of this document is 1.3 V.
Replaced notes at bottom of Tab le 1 7 (erroneously missing in revisions 1.
Updated coplanarity specifications in Figure 20 and Figure 21 from 0.2 mm to 0.15 mm.
3 Added Revision G (Rev 3.4) devices to specifications.
Added new PowerPC trademarking information.
4 Added substrate capacitor information in Section 8.3, “Substrate Capacitors for the MPC7445, 360
CBGA,” and Section 8.6, “Substrate Capacitors for the MPC7455, 483 CBGA.”
Clarified maximum and typical L3 clock frequency in Section 5.2.3, “L3 Clock AC Specifications”; typical
L3 frequency now stated as 250 MHz based on changes to L3 AC timing.
Significantly changed L3 AC timing in Tab l e 12 and Table 13. These changes reflect both updates
based on latest characterization and error corrections (effects of non-zero L3OH values were incorrectly
documented in earlier revisions of this document).
Clarified address bus pull-up resistor recommendations in Section 9.6, “Pull-Up/Pull-Down Resistor
Requirements.”
Added pull-up/pull-down recommendations for CKSTP_IN
“Pull-Up/Pull-Down Resistor Requirements.”
Modified Table 9, Figure 5, and Figure 6 to more accurately show when the mode select inputs
(BMODE
Figure 20 and Figure 22: Updated/corrected dimensions in mechanical drawings.
4.1 Document tempate update.
[0:1], L3VSEL, BVSEL) are sampled and AC timing requirements.
and PLL_CFG[0:4] to Section 9.6,
x
).
11 Ordering Information
Ordering information for the parts fully covered by this specification document is provided in Section 11.1, “Part
Numbers Fully Addressed by This Document.” Note that the individual part numbers correspond to a maximum
processor core frequency. For available frequencies, contact your local Freescale sales office. In addition to the
processor frequency, the part numbering scheme also includes an application modifier which may specify special
application conditions. Each part number also contains a revision level code which refers to the die mask revision
number. Sectio n 11.2, “Part Numbers Not Fully Addressed by This Document , ” lists the part number s which do not
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
60 Freescale Semiconductor
Page 61

Ordering Information
fully conform to the specifications of this document. These special part numbers require an additional document
called a part number specification.
11.1 Part Numbers Fully Addressed by This Document
Table 21 provides the Freescale part numbering nomenclature for the MPC7455.
Table 21. Part Numbering Nomenclature
xx 74x5 x RX nnnn x x
Product
Code
2
XC
MC G: 3.4; PVR = 8001 0304
Notes:
1. Processor core frequencies supported by parts addressed by this specification only. Parts addressed by part
number specifications may support other maximum core frequencies.
2. The X prefix in a Freescale part number designates a “Pilot Production Prototype” as defined by Freescale SOP
3-13. These are from a limited production volume of prototypes manufactured, tested, and Q.A. inspected on a
qualified technology to simulate normal production. These parts have only preliminary reliability and
characterization data. Before pilot production prototypes may be shipped, written authorization from the customer
must be on file in the applicable sales office acknowledging the qualification status and the fact that product changes
may still occur while shipping pilot production prototypes.
Part
Identifier
7455
7445
Process
Descriptor
ARX=CBGA733
Package
Processor
Frequency
867
933
1000
Application
1
Modifier
L: 1.3 V ± 50 mV
0 to 105°C
Revision Level
F: 3.3; PVR = 8001 0303
11.2 Part Numbers Not Fully Addressed by This Document
Parts with application modifiers or revision levels not fully addressed in this specification document are described
in separate part number specifications which supplement and supersede this document; see Table 22 through
Table 25.
Table 22. Part Numbers Addressed by XPC74x5RX
Order No. MPC7455RXLCPNS)
nnn
LC Series Part Number Specification (Document
XPC 74x5 RX nnn L C
Product
Code
XPC 7455
PPC 1000
Freescale Semiconductor 61
Part
Identifier
7445
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Package
RX = CBGA 600
Processor
Frequency
733
800
867
933
Application Modifier Revision Level
L: 1.6 V ± 50 mV
0 to 105°C
C: 2.1; PVR = 8001 0201
Page 62
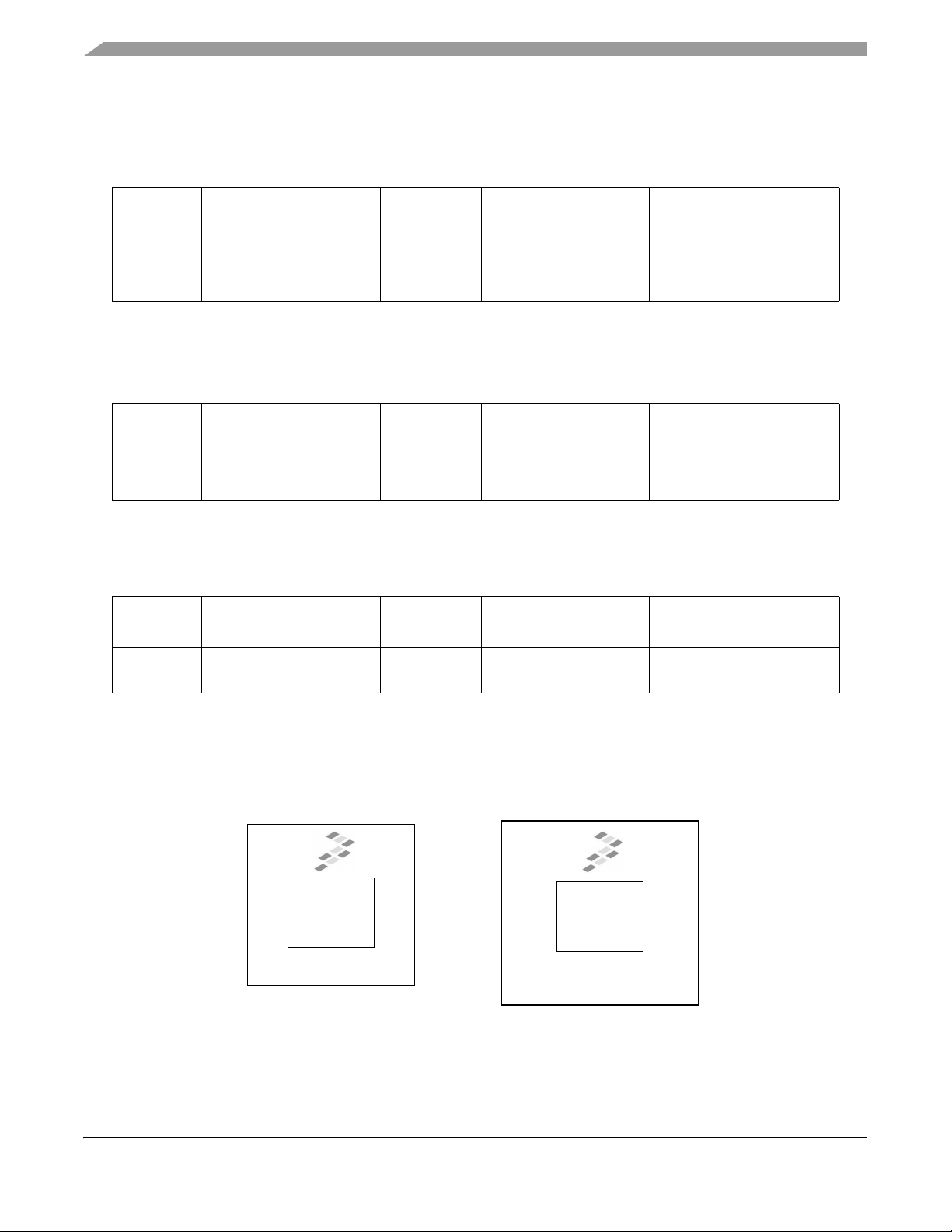
Ordering Information
Table 23. Part Numbers Addressed by XPC74
x
5RX
nnnNx
Series Part Number Specification (Document
Order No. MPC7455RXNXPNS)
XPC 74x5 RX nnn N C
Product
Code
XPC 7455
Table 24. Part Numbers Addressed by XPC74x5RX
Part
Identifier
7445
Package
RX = CBGA 600
Processor
Frequency
733
800
Application Modifier Revision Level
N: 1.3 V ± 50 mV
0 to 105°C
nnnPx
Series Part Number Specification (Document
Order No. MPC7455RXPXPNS)
XPC 7455 RX nnn P C
Product
Code
XPC 7455 RX = CBGA 933
Table 25. Part Numbers Addressed by XPC74x5RX
Part
Identifier
Package
Processor
Frequency
1000
Application Modifier Revision Level
P: 1.85 V ± 50 mV
0 to 65°C
nnnSx
Series Part Number Specification (Document
Order No. MPC7455RXSXPNS)
C: 2.1; PVR = 8001 0201
C: 2.1; PVR = 8001 0201
XPC 7455 RX nnnn S C
Product
Code
XPC 7455 RX = CBGA 1000 S: 1.85 V ± 50 mV
Part
Identifier
Package
Processor
Frequency
11.3 Part Marking
Parts are marked as the example shown in Figure 31.
MC7445A
RX1000LG
MMMMMM
ATWLYYWWA
7440
BGA
:
Notes
MMMMMM is the 6-digit mask number.
ATWLYYWWA is the traceability code.
Figure 31. Part Marking for BGA Device
Application Modifier Revision Level
C: 2.1; PVR = 8001 0201
0 to 75°C
MC7455A
RX1000LG
MMMMMM
ATWLYYWWA
7450
BGA
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
62 Freescale Semiconductor
Page 63

THIS PAGE INTENTIONALLY LEFT BLANK
Ordering Information
MPC7455 RISC Microprocessor Hardware Specifications, Rev. 4.1
Freescale Semiconductor 63
Page 64

How to Reach Us:
Home Page:
www.freescale.com
email:
support@freescale.com
USA/Europe or Locations Not Listed:
Freescale Semiconductor
Technical Information Center, CH370
1300 N. Alma School Road
Chandler, Arizona 85224
(800) 521-6274
480-768-2130
support@freescale.com
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
support@freescale.com
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku
Tokyo 153-0064, Japan
0120 191014
+81 2666 8080
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate,
Tai Po, N.T., Hong Kong
+800 2666 8080
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor
Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
(800) 441-2447
303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor
@hibbertgroup.com
Information in this document is provided solely to enable system and software
implementers to use Freescale Semiconductor products. There are no express or
implied copyright licenses granted hereunder to design or fabricate any integrated
circuits or integrated circuits based on the information in this document.
Freescale Semiconductor reserves the right to make changes without further not ice to
any products herein. Freescale Semiconductor makes no warranty, representation or
guarantee regarding the suitability of its products for any particular purpose, nor does
Freescale Semiconductor assume any liability arising out of the application or use of
any product or circuit, and specifically disclaims any and all liability, including without
limitation consequential or incidental dama ges. “Typical” parameters which may be
provided in Freescale Semiconductor data sheets and/or specifications can and do
vary in different applications and actual performance may vary over time. All operating
parameters, including “Typicals” must be validated for each customer application by
customer’s technical experts. Freescale Semiconductor does not convey any license
under its patent rights nor the rights of others. Freescale Semiconductor products are
not designed, intended, or authorized for use as components in systems intended for
surgical implant into the body, or other applications intended to support or sustain life,
or for any other application in which the failure of the Freescale Semiconductor product
could create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended or
unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor
and its officers, employees, subsidiaries, affiliates, and distributors harmless agai nst all
claims, costs, damages, and expenses, and reasonable attorney fees arising out of,
directly or indirectly, any claim of personal injury or death associated with such
unintended or unauthorized use, even if such claim alleges that Freescale
Semiconductor was negligent regarding the design or manuf acture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.
The described product is a PowerPC microprocessor. The PowerPC name is a
trademark of IBM Co rp. and used unde r license. A ll other produc t or service names are
the property of their respective owners.
© Freescale Semiconductor, Inc. 2005.
MPC7455EC
Rev. 4.1
02/2005
 Loading...
Loading...