

Page 1

M5235EVB User’s Manual
Devices Supported:
MCF5235
MCF5234
MCF5233
MCF5232
Document Number: M5235EVBUM
Rev. 1.2
08/2005
Page 2

How to Reach Us:
Home Page:
www.freescale.com
E-mail:
support@freescale.com
USA/Europe or Locations Not Listed:
Freescale Semiconductor
Technical Information Center, CH370
1300 N. Alma School Road
Chandler, Arizona 85224
+1-800-521-6274 or +1-480-768-2130
support@freescale.com
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
support@freescale.com
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064, Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate
Tai Po, N.T., Hong Kong
+800 26668334
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Information in this document is provided solely to enable system and
software implementers to use Freescale Semiconductor products. There are
no express or implied copyright licenses granted hereunder to design or
fabricate any integrated circuits or integrated circuits based on the
information in this document.
Freescale Semiconductor reserves the right to make changes without further
notice to any products herein. Freescale Semiconductor makes no warranty,
representation or guarantee regarding the suitability of its products for any
particular purpose, nor does Freescale Semiconductor assume any liability
arising out of the application or use of any product or circuit, and specifically
disclaims any and all liability, including without limitation consequential or
incidental damages. “Typical” parameters that may be provided in Freescale
Semiconductor data sheets and/or specifications can and do vary in different
applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer
application by customer’s technical experts. Freescale Semiconductor does
not convey any license under its patent rights nor the rights of others.
Freescale Semiconductor products are not designed, intended, or authorized
for use as components in systems intended for surgical implant into the body,
or other applications intended to support or sustain life, or for any other
application in which the failure of the Freescale Semiconduc tor product could
create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semicon ductor products for any such unintended
or unauthorized application, Buyer shall indemnify and hold Freescale
Semiconductor and its officers, employees, subsidiaries, affiliates, and
distributors harmless against all claims, costs, damages, and expenses, and
reasonable attorney fees arising out of, directly or indirectly, any claim of
personal injury or death associated with such unintended or unauthorized
use, even if such claim alleges that Freescale Semiconductor was negligent
regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale
Semiconductor, Inc. All other product or service names are the property
of their respective owners.
© Freescale Semiconductor, Inc. 2005. All rights reserved.
Document Number: M5235EVBUM
Rev. 1.2
08/2005
Page 3

EMC Information on M523xEVB
1. This product as shipped from the factory with associated power supplies and cables, has been tested and
meets with requirements of EN5022 and EN 50082-1: 1998 as a CLASS A product.
2. This product is designed and intended for use as a development platform for hardware or software in an
educational or professional laboratory.
3. In a domestic environment this product may cause radio interference in which case the user may be
required to take adequate measures.
4. Anti-static precautions must be adhered to when using this product.
5. Attaching additional cables or wiring to this product or modifying the products operation from the factory
default as shipped may effect its performance and also cause interference with other apparatus in the
immediate vicinity. If such interference is detected, suitable mitigating measures should be taken.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor iii
Page 4

WARNING
This board generates, uses, and can radiate radio frequency energy and, if not
installed properly, may cause interference to radio communications. As
temporarily permitted by regulation, it has not been tested for compliance with the
limits for class a computing devices pursuant to Subpart J of Part 15 of FCC rules,
which are designed to provide reasonable protection against such interference.
Operation of this product in a residential area is likely to cause interference, in
which case the user, at his/her own expense, will be required to correct the
interference.
M523xEVB User’s Manual, Rev. 1.2
iv Freescale Semiconductor
Page 5
Contents
Paragraph
Number
Title
Page
Number
Chapter 1
M523xEVB
1.1 MCF5235 Microprocessor .............................................................................................. 1-3
1.2 System Memory .............................................................................................................. 1-6
1.2.1 External Flash ............................................................................................................. 1-6
1.2.2 SDRAM ...................................................................................................................... 1-7
1.2.3 ASRAM ...................................................................................................................... 1-7
1.2.4 Internal SRAM ............................................................................................................ 1-7
1.2.5 M523xEVB Memory Map .......................................................................................... 1-7
1.2.5.1 Reset Vector Mapping ............................................................................................ 1-8
1.3 Support Logic ................................................................................................................. 1-8
1.3.1 Reset Logic ................................................................................................................. 1-8
1.3.2 Clock Circuitry ......................................................................................................... 1-10
1.3.3 Watchdog Timer ....................................................................................................... 1-10
1.3.4 Exception Sources ..................................................................................................... 1-11
1.3.5 TA Generation .......................................................................................................... 1-11
1.3.6 User’s Program ......................................................................................................... 1-12
1.4 Communication Ports ................................................................................................... 1-12
1.4.1 UART0 and UART1 Ports ........................................................................................ 1-12
1.4.2 UART2/FlexCAN1 Port ........................................................................................... 1-13
1.4.3 FlexCAN0 Port ......................................................................................................... 1-13
1.4.4 10/100T Ethernet Port ............................................................................................... 1-14
1.4.5 eTPU ......................................................................................................................... 1-15
1.4.6 BDM/JTAG Port ....................................................................................................... 1-16
1.4.7 I2C ............................................................................................................................ 1-17
1.4.8 QSPI .......................................................................................................................... 1-18
1.4.9 USB Host and Device ............................................................................................... 1-18
1.5 Connectors and User Components ................................................................................ 1-19
1.5.1 Daughter Card Expansion Connectors ...................................................................... 1-19
1.5.2 Reset Switch (SW6) .................................................................................................. 1-23
1.5.3 User LEDs .................................................................................................................1-23
1.5.4 Other LEDs ............................................................................................................... 1-24
Chapter 2
Initialization and Setup
2.1 System Configuration ..................................................................................................... 2-1
2.2 Installation and Setup ......................................................................................................2-3
2.2.1 Unpacking ................................................................................................................... 2-3
2.2.2 Preparing the Board for Use ....................................................................................... 2-3
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor v
Page 6

Contents
Paragraph
Number
2.2.3 Providing Power to the Board ..................................................................................... 2-3
2.2.4 Power Switch (SW4) .................................................................................................. 2-4
2.2.5 Power Status LEDs and Fuse ...................................................................................... 2-4
2.2.6 Selecting Terminal Baud Rate .................................................................................... 2-4
2.2.7 The Terminal Character Format ................................................................................. 2-5
2.2.8 Connecting the Terminal ............................................................................................ 2-5
2.2.9 Using a Personal Computer as a Terminal .................................................................. 2-5
2.3 System Power-up and Initial Operation .......................................................................... 2-8
2.4 Using The BDM Port ...................................................................................................... 2-8
Title
Page
Number
Chapter 3
Using the Monitor/Debug Firmware
3.1 What Is dBUG? ...............................................................................................................3-1
3.2 Operational Procedure .................................................................................................... 3-2
3.2.1 System Power-up ........................................................................................................ 3-2
3.2.2 System Initialization ................................................................................................... 3-3
3.2.2.1 External RESET Button .......................................................................................... 3-4
3.2.2.2 ABORT Button ....................................................................................................... 3-4
3.2.2.3 Software Reset Command ...................................................................................... 3-4
3.3 Command Line Usage .................................................................................................... 3-4
3.4 Commands ...................................................................................................................... 3-5
3.5 TRAP #15 Functions .................................................................................................... 3-39
3.5.1 OUT_CHAR ............................................................................................................. 3-39
3.5.2 IN_CHAR ................................................................................................................. 3-40
3.5.3 CHAR_PRESENT .................................................................................................... 3-40
3.5.4 EXIT_TO_dBUG ...................................................................................................... 3-41
Appendix A
Configuring dBUG for Network Downloads
A.1 Required Network Parameters ......................................................................................... 4-1
A.2 Configuring dBUG Network Parameters......................................................................... 4-1
A.3 Troubleshooting Network Problems................................................................................ 4-2
Appendix B
Schematics
Appendix C
Evaluation Board BOM
M523xEVB User’s Manual, Rev. 1.2
vi Freescale Semiconductor
Page 7
Figures
Figure
Number
1-1 M523xEVB Block Diagram ..................................................................................................... 1-3
1-2 MCF5235 Block Diagram ........................................................................................................1-5
1-3 External Memory Scheme ........................................................................................................ 1-6
1-4 J1- BDM Connector Pin Assignment ..................................................................................... 1-17
2-1 Minimum System Configuration .............................................................................................. 2-2
2-2 2.1mm Power Connector .......................................................................................................... 2-3
2-3 2-Lever Power Connector......................................................................................................... 2-4
2-4 Pin Assignment for Female (Terminal) Connector................................................................... 2-5
2-5 Jumper Locations...................................................................................................................... 2-7
3-1 Flow Diagram of dBUG Operational Mode ............................................................................. 3-3
Title
Page
Number
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor Freescale Semiconductor Internal Use Only vii
Page 8

Figures
Figure
Number
Title
Page
Number
M523xEVB User’s Manual, Rev. 1.2
viii Freescale Semiconductor Internal Use Only Freescale Semiconductor
Page 9

Tables
Table
Number
1-1 M523x Product Family ............................................................................................................. 1-1
1-2 The M523xEVB Default Memory Map.................................................................................... 1-8
1-3 D[20:19] External Boot Chip Select Configuration ................................................................. 1-8
1-4 SW7-1 RCON ........................................................................................................................... 1-9
1-5 SW7-2 JTAG_EN ..................................................................................................................... 1-9
1-6 SW7-[4:3] Encoded Clock Mode ............................................................................................. 1-9
1-7 SW7-5 Chip Configuration Mode............................................................................................. 1-9
1-8 SW7-[7:6] Boot Device ............................................................................................................ 1-9
1-11 M523xEVB Clock Source Selection ...................................................................................... 1-10
1-9 SW7-8 Bus Drive Strength .....................................................................................................1-10
1-10 SW7-[10:9] Address/Chip Select Mode ................................................................................. 1-10
1-12 UART2/FlexCAN1 Jumper Configuration............................................................................. 1-13
1-13 FlexCAN1 Jumper Configuration........................................................................................... 1-13
1-14 FlexCAN0 Jumper Configuration........................................................................................... 1-13
1-15 CAN Bus Connector Pinout....................................................................................................1-14
1-16 Ethernet/eTPU Jumper Configuration .................................................................................... 1-15
1-17 eTPU Header Pin Assignment ................................................................................................ 1-16
1-18 USB DMA Enable and Disable Settings ................................................................................ 1-18
1-19 J7............................................................................................................................................. 1-19
1-20 J8............................................................................................................................................. 1-20
1-21 J9............................................................................................................................................. 1-21
1-22 J10........................................................................................................................................... 1-22
1-23 User LEDs............................................................................................................................... 1-23
1-24 LED Functions........................................................................................................................ 1-24
2-1 Power LEDs.............................................................................................................................. 2-4
2-2 Pin Assignment for Female (Terminal) Connector................................................................... 2-5
3-1 dBUG Command Summary...................................................................................................... 3-5
C-1 M523xEVB Bill of Materials ...................................................................................................6-2
Title
Page
Number
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor Freescale Semiconductor Internal Use Only ix
Page 10

Tables
Table
Number
Title
Page
Number
M523xEVB User’s Manual, Rev. 1.2
x Freescale Semiconductor Internal Use Only Freescale Semiconductor
Page 11

Chapter 1 M523xEVB
This document details the setup and configuration of the ColdFire M523xEVB evaluation board (hereafter
referred to as the EVB). The EVB is intended to provide a mechanism for easy customer evaluation of the
MCF523x family of ColdFire microprocessors and to facilitate hardware and software development. The
EVB can be used by software and hardware developers to test programs, tools, or circuits without having
to develop a complete microprocessor system themselves. All special features of the MCF523x family are
supported.
The heart of the evaluation board is the MCF5235, all the other M523x family members have a subset of
the MCF5235 specification and can therefore be fully emulated using the MCF5235 device. Table 1-1
below details the full product family.
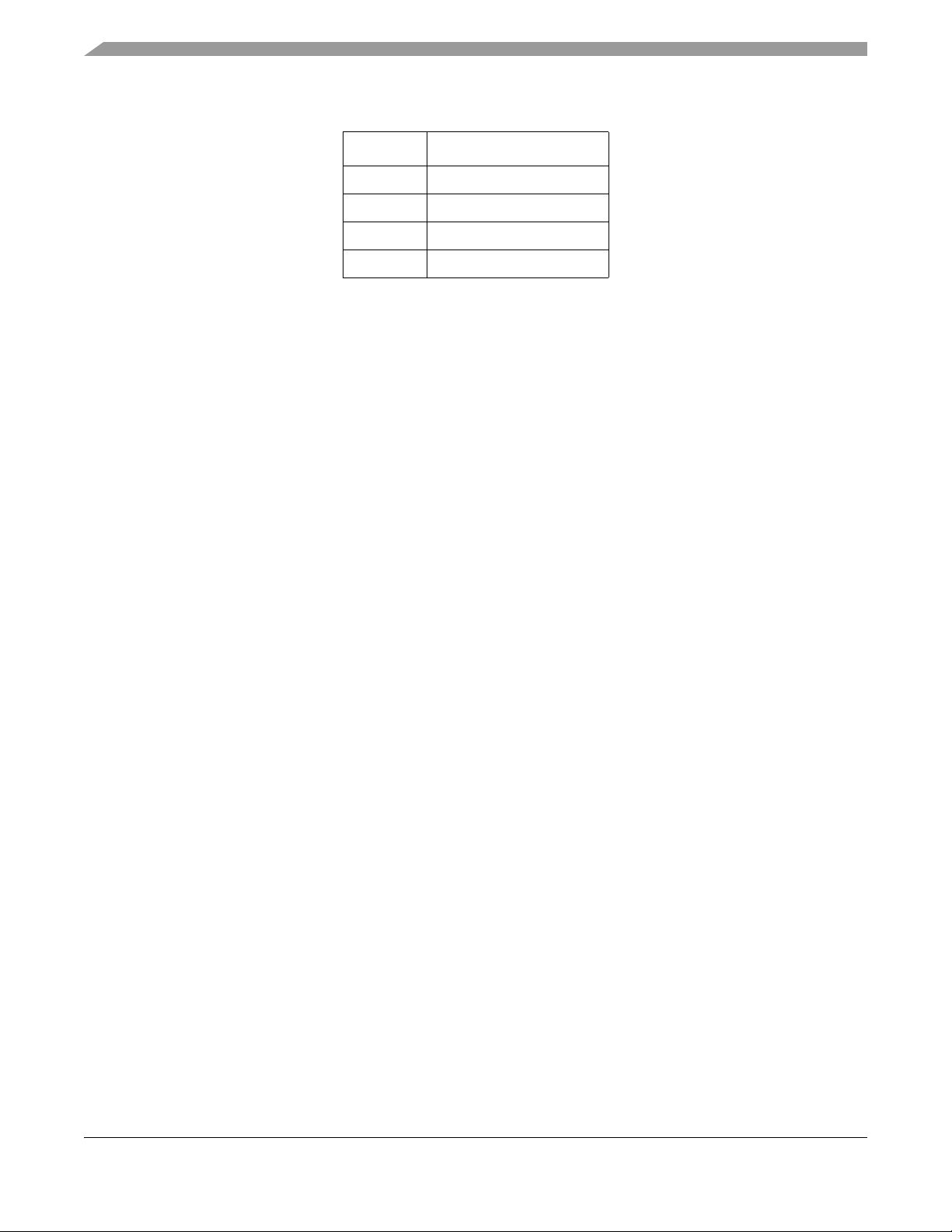
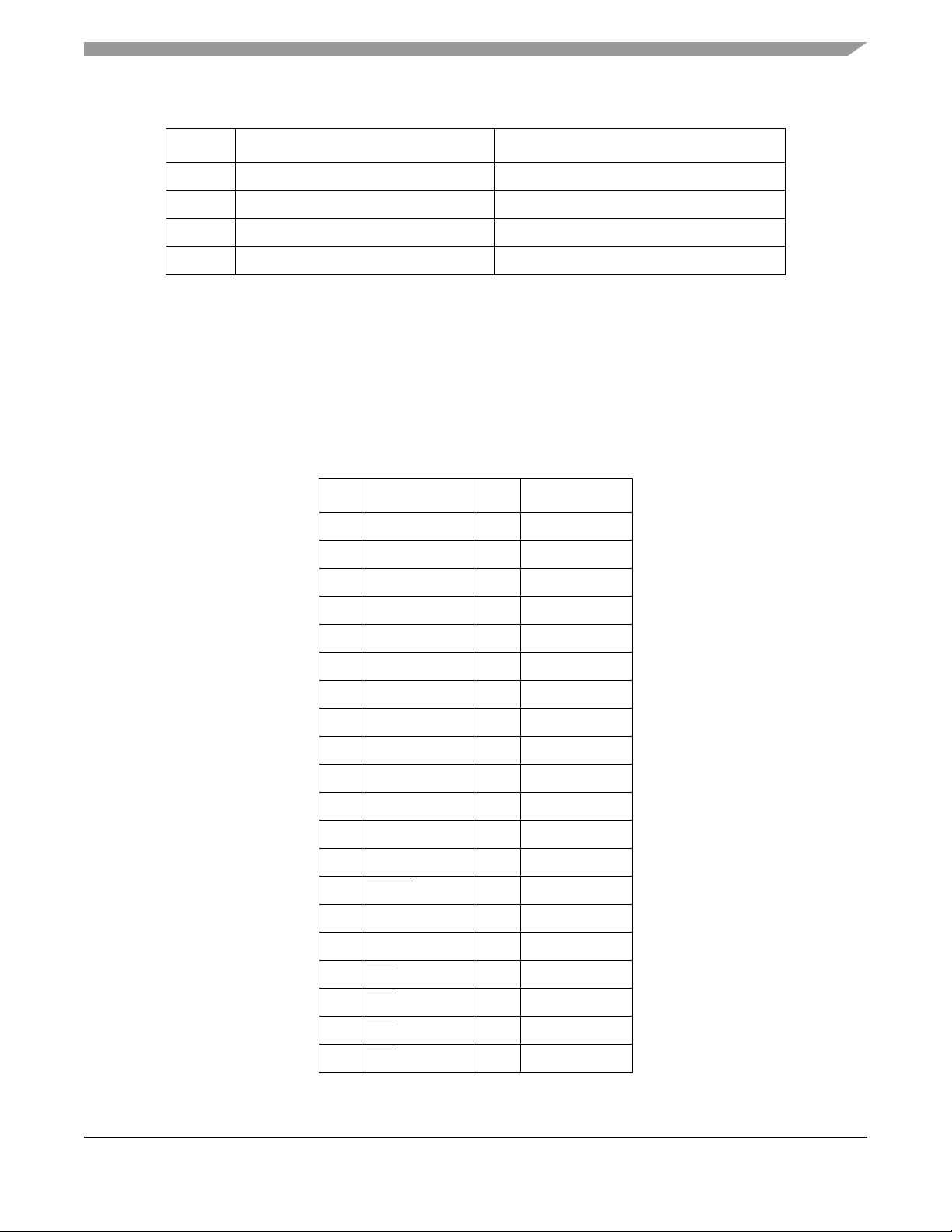
Table 1 - 1 . M5 2 3x Product Family
Part Number Package eTPU FEC CRYPTO CAN
MCF5232CAB80 160 QFP 16-channel No No 1
MCF5232CVM100 196 MAPBGA 16-channel No No 1
MCF5232CVM150 196 MAPBGA 16-channel No No 1
MCF5233CVM100 256 MAPBGA 32-channel No No 2
MCF5233CVM150 256 MAPBGA 32-channel No No 2
MCF5234CVM100 256 MAPBGA 16-channel Yes No 1
MCF5234CVM150 256 MAPBGA 16-channel Yes No 1
MCF5235CVM100 256 MAPBGA 16-channel Yes Yes 2
MCF5235CVM150 256 MAPBGA 16-channel Yes Yes 2
All of the devices in the same package are pin compatible.
The EVB provides for low cost software testing with the use of a ROM resident debug monitor, dBUG,
programmed into the external Flash device. Operation allows the user to load code in the on-board RAM,
execute applications, set breakpoints, and display or modify registers or memory. No additional hardware
or software is required for basic operation.
Specifications:
• Motorola MCF5235 Microprocessor (150 MHz max core frequency)
• External Clock source: 25 MHz
• Operating temperature: 0°C to +70°C
• Power requirement: 7–14V DC @ 300 ma Typical
• Power output: 5V, 3.3V and 1.5V regulated supplies
• Board Size: 10.00 × 5.40 inches, 8 layers
Memory Devices:
• 16-Mbyte SDRAM
• 2-Mbyte (512K × 16) Page Mode FLASH or 4-Mbyte (512K × 32) Page mode FLASH
• 1-Mbyte ASRAM (optional)
• 64-Kbyte SRAM internal to MCF523x device
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-1
Page 12
M523xEVB
Peripherals:
• Ethernet port 10/100Mb/s (Dual-Speed Fast Ethernet Transceiver, with MII)
• UART0 (RS-232 serial port for dBUG firmware)
• UART1 (auxiliary RS-232 serial port)
• UART2 (auxiliary1 RS-232 serial port jumper selectable with FlexCAN1)
• Enhanced Time Processor Unit (eTPU)
2
•I
C interface
• QSPI interface to ADC
• FlexCan0 interface
• USB Host and Device Interface
• BDM/JTAG interface
User Interface:
• Reset logic switch (debounced)
• Boot logic selectable (dip switch)
• Abort/IRQ7 logic switch (debounced)
• PLL Clocking options - Oscillator, Crystal or SMA for external clocking signals
• LEDs for power-up indication, general purpose I/O, and timer output signals
• Expansion connectors for daughter card
• UNI-3 connector for motor control cards
Software:
• Resident firmware package that provides a self-contained programming and operating
environment (dBUG)
M523xEVB User’s Manual, Rev. 1.2
1-2 Freescale Semiconductor
Page 13
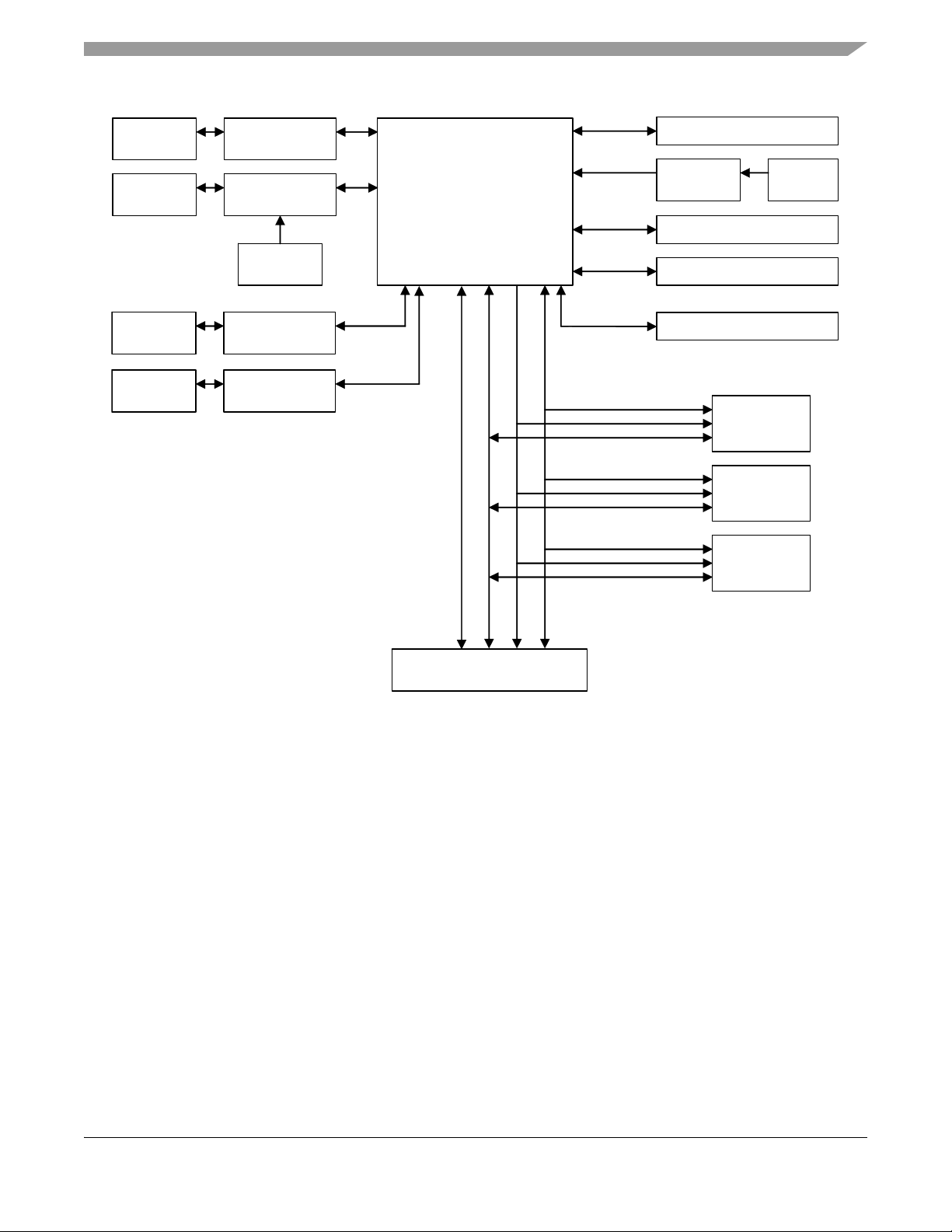
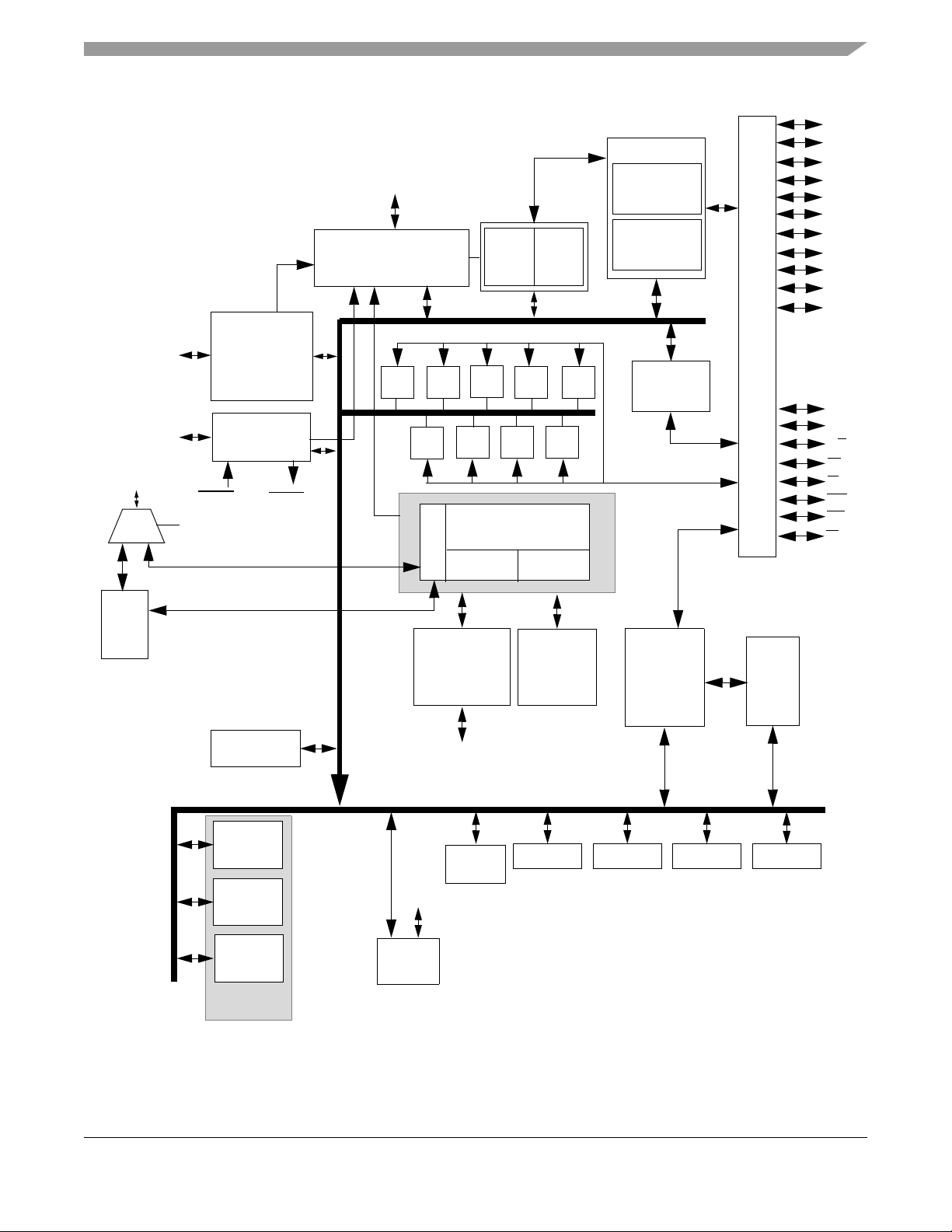
MCF5235 Microprocessor
r
DB-9 (2)
connector
RJ-45
connector
DB-9
connector
DB-9
connector
RS-232
transceivers (2)
Ethernet
Transceiver*
25 MHz
Osc.
CAN Transceiver
RS-232 / CAN
Transceiver
ColdFire MCF523X
Peripheral signals
Data [31:0]
Address [23:0]
Control Signals
26-pin Debug Heade
Clocking
circuitry
25 MHz
Osc.
USB 2.0 Host & Device
ADC
ETPU Headers*
SDRAM
16 Mbytes
Flash
2-4 Mbytes
ASRAM
1 Mbyte
(4) 60 pin Daughter Card
expansion connectors
*There is a jumper that allows the option of choosing between 16 eTPU channels and
Ethernet or 32 eTPU channels and no Ethernet
Figure 1-1. M523xEVB Block Diagram
1.1 MCF5235 Microprocessor
The microprocessor used on the EVB is the highly integrated Motorola MCF5235 32-bit ColdFire
variable-length RISC processor. The MCF5235 implements a ColdFire Version 2 core with a maximum
core frequency of 150 MHz and external bus speed of 75 MHz. Features of the MCF5235 include:
• V2 ColdFire core with enhanced multiply-accumulate unit (EMAC) providing 144 (Dhrystone 2.1)
MIPS @ 150 MHz
• eTPU with 16 or 32 channels, 6 Kbytes of code memory and 1.5 Kbytes of data memory with
debug support
• 64 Kbytes of internal SRAM
• External bus speed of one half the CPU operating frequency (75 MHz bus @ 150 MHz core)
• 10/100 Mbps bus-mastering Ethernet controller
• 8 Kbytes of configurable instruction/data cache
• Three universal asynchronous receiver/transmitters (UARTs) with DMA support
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-3
Page 14

M523xEVB
• Controller area network 2.0B (FlexCAN module)
— Optional second FlexCAN module multiplexed with the third UART
• Inter-integrated circuit (I
2
C) bus controller
• Queued serial peripheral interface (QSPI) module
• Hardware cryptography accelerator (optional)
— Random number generator
— DES/3DES/AES block cipher engine
— MD5/SHA-1/HMAC accelerator
• Four channel 32-bit direct memory access (DMA) controller
• Four channel 32-bit input capture/output compare timers with optional DMA support
• Four channel 16-bit periodic interrupt timers (PITs)
• Programmable software watchdog timer
• Interrupt controller capable of handling up to 126 interrupt sources
• Clock module with Phase Locked Loop (PLL)
• External bus interface module including a 2-bank synchronous DRAM controller
• 32-bit non-multiplexed bus with up to 8 chip select signals that support page-mode FLASH
memories
The MCF5235 communicates with external devices over a 32-bit wide data bus, D[31:0]. The MCF5235
can address a 32 bit address range. However, only 24 bits are available on the external bus A[23:0]. There
are internally generated chip selects to allow the full 32 bit address range to be selected. There are regions
that can be decoded to allow supervisor, user, instruction, and data each to have the 32-bit address range.
All the processor's signals are available via daughter card expansion connectors. Refer to the schematic
(Appendix B) for their pin assignments.
The MCF5235 processor has the capability to support both BDM and JTAG. These ports are multiplexed
and can be used with third party tools to allow the user to download code to the board. The board is
configured to boot up in the normal/BDM mode of operation. The BDM signals are available at the port
labeled BDM.
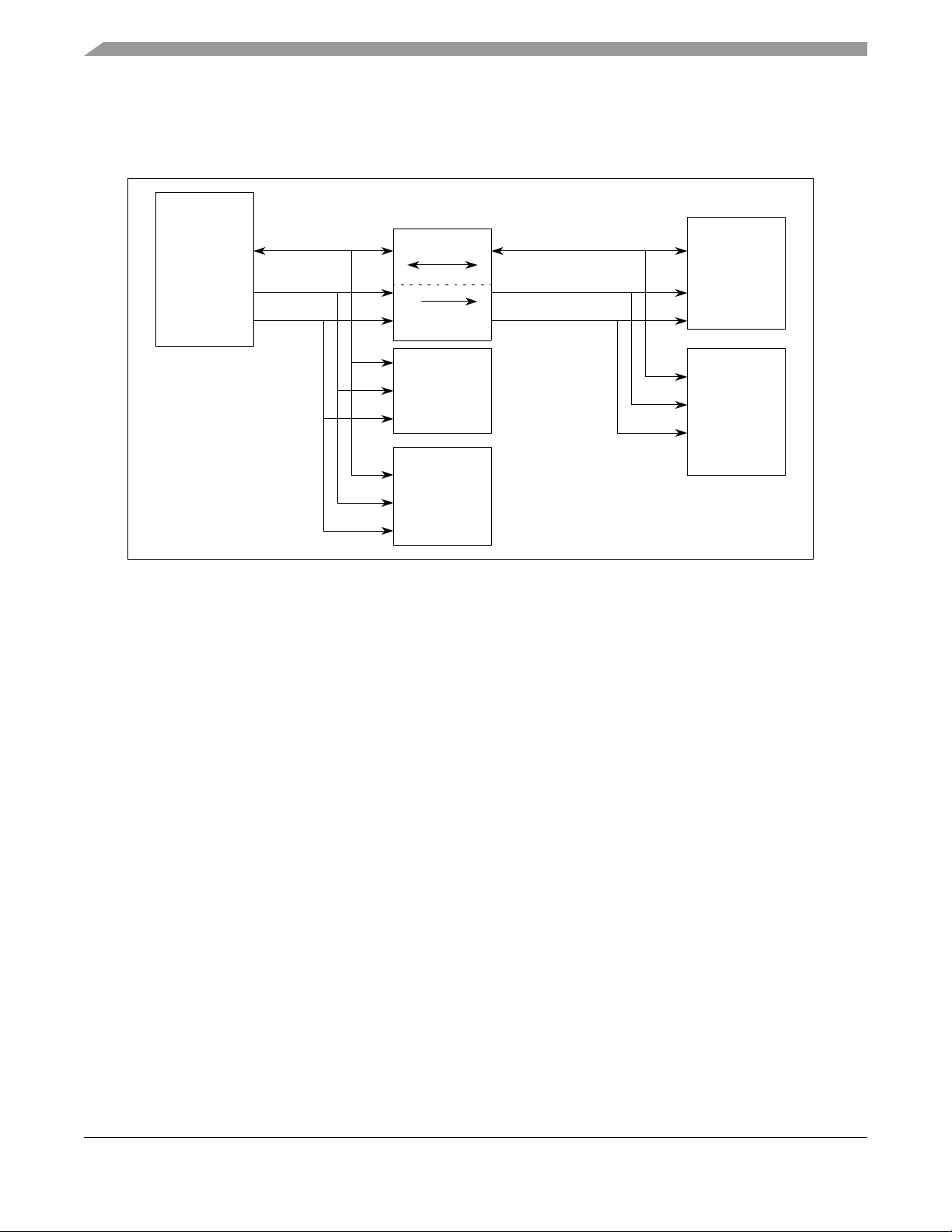
Figure 1-2 shows the MCF5235 processor block diagram.
M523xEVB User’s Manual, Rev. 1.2
1-4 Freescale Semiconductor
Page 15
(To/From PADI)
(To/From PADI)
(To/From
PAD I)
MUX
DREQ[2:0]
JTAG_EN
FAST
ETHERNET
CONTROLLER
(FEC)
4 CH DMA
DACK[2:0]
(To/From SRAM backdoor)
Arbiter
UART
UART
0
1
DTIM
DTIM
0
V2 ColdFire CPU
BDM
UART
2
1
DIV
INTC0
DTIM
2
2
I
INTC1
C
EMAC
QSPI
DTIM
3
EIM
CHIP
SELECTS
EBI
SDRAMC
MCF5235 Microprocessor
SDRAMC
QSPI
SDA
SCL
UnTXD
UnRXD
UnRTS
UnCTS
TnOUT
TnIN
FEC
PAD I
D[31:0]
A[23:0]
R/
W
CS[3:0]
TA
TSIZ[1:0]
TEA
BS[3:0]
JTAG
TAP
Watchdog
Timer
SKHA
RNGA
MDHA
Cryptography
Modules
64 Kbytes
SRAM
(8Kx16)x4
8 Kbytes
CACHE
(1Kx32)x2
(To/From Arbiter)
PLL
PIT0
CLKGEN
(To/From INTC)
Edge
Port
Figure 1-2. MCF5235 Block Diagram
PORTS
(GPIO)
CIM
PIT1 PIT2 PIT3
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-5
Page 16
M523xEVB
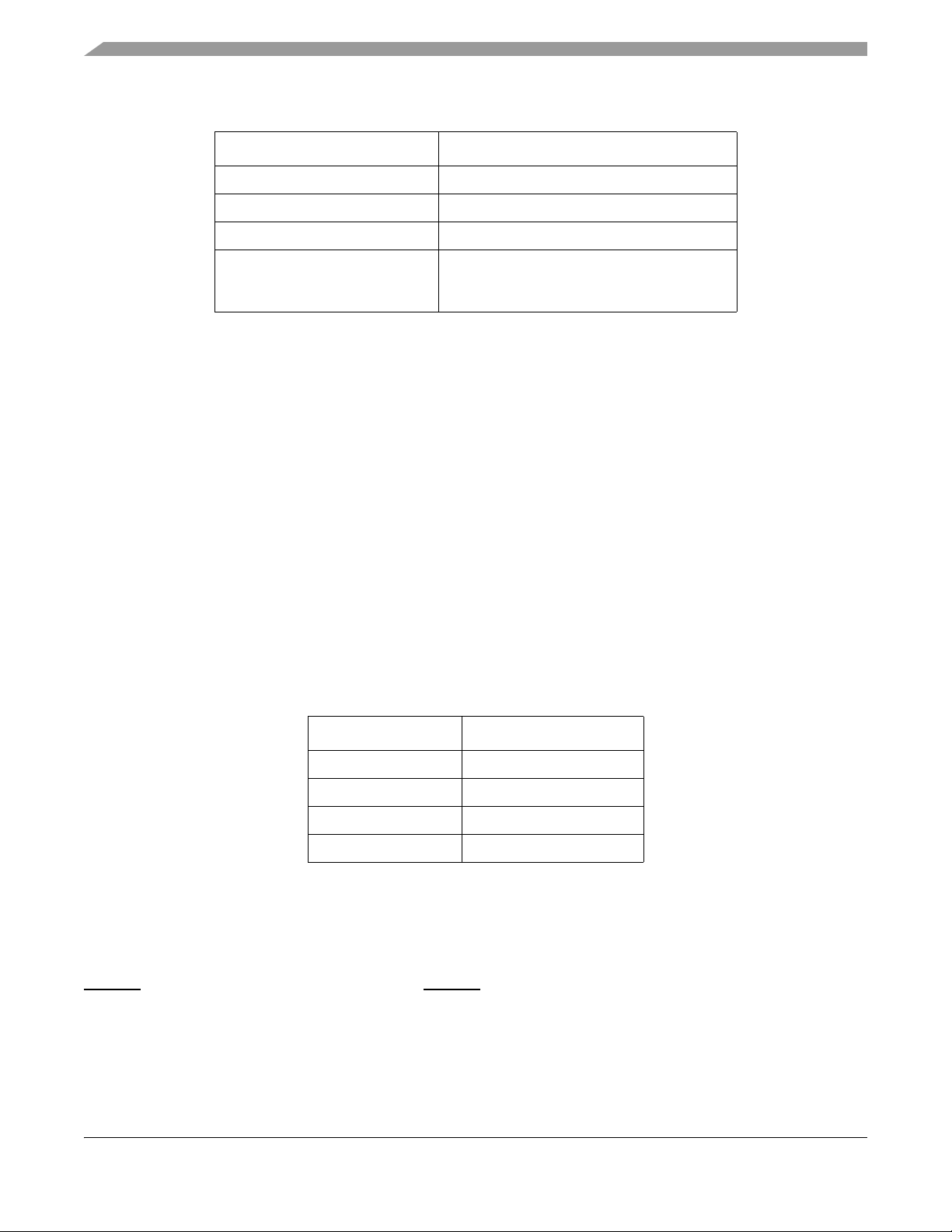
1.2 System Memory
The following diagram shows the external memory implementation on the EVB.
MPU
Data
Address
Control
Buffers
SDRAM
(16 Mbytes)
Expansion
Connectors
Figure 1-3. External Memory Scheme
NOTE:
ASRAM
(1 Mbyte)
Flash
(512K × 16
or
512K × 32)
The external bus interface signals to the external ASRAM and FLASH (and
USB) are buffered. This is in order not to exceed the maximum output load
capacitance of the microprocessor on the EVB. The signals to the expansion
connectors remain unbuffered to provide a “true” interface to the user.
1.2.1 External Flash
The EVB is fitted with a single 512K × 16 page-mode FLASH memory (U19) giving a total memory space
of 2Mbytes. Alternatively a footprint is available for the EVB user to upgrade this device to a 512K × 32
page-mode FLASH memory (U35), doubling the memory size to 4Mbytes. Either U19 OR U35 should be
fitted on the board - both devices cannot be populated at the same time. Refer to the specific device data
sheet and sample software provided for configuring the FLASH memory.
Users should note that the debug monitor firmware is installed in this flash device. Development tools or
user application programs may erase or corrupt the debug monitor. If the debug monitor becomes
corrupted and it’s operation is desired, the firmware must be programmed into the flash by applying a
development port tool such as BDM. Users should use caution to avoid this situation. The M523xEVB
dBUG debugger/monitor firmware is programmed into the lower sectors of Flash (0xFFE0_0000 to
0xFFE2_FFFF for 2Mbytes of FLASH or 0xFFC0_0000 to 0xFFC2_FFFF for 4 Mbytes of FLASH).
By default with U19 fitted on the EVB, jumper 64 (JP64) provides an alternative hardware mechanism for
write protection.
M523xEVB User’s Manual, Rev. 1.2
1-6 Freescale Semiconductor
Page 17

System Memory
If the user has replaced U19 with the 32-bit FLASH device (U35), jumper 31 (JP31) has the same
functionality as JP64. U35 also has it’s own hardware write protect pin (C5) which protects the bottom
boot sector when pulled to ground.
1.2.2 SDRAM
The EVB is populated with 16 Mbytes of SDRAM. This is done with two devices (Micron
MT48LC4M16A2TG) each with a 16 bit data bus. Each device is organized as 1 Meg × 16 × 4 banks with
a 16 bit data bus. One device stores the upper 16-bit word and the other the lower 16 bit word of the
MCF523x 32 bit data bus.
1.2.3 ASRAM
The EVB has a footprint for two 512K × 16 Asynchronous SRAM devices (Cypress Semiconductor -
CY7C1041CV3310ZC). These memory devices (U1 and U2) may be populated by the user for
benchmarking purposes.
Also see Section 1.2.5, “M523xEVB Memory Map”.
1.2.4 Internal SRAM
The MCF5235 processor has 64-Kbytes of internal SRAM memory which may be used as data or
instruction memory. This memory is mapped to 0x2000_0000 and configured as data space but is not used
by the dBUG monitor except during system initialization. After system initialization is complete, the
internal memory is available to the user. The memory is relocatable to any 32-Kbyte boundary within the
processor’s four gigabyte address space.
1.2.5 M523xEVB Memory Map
Interface signals to support the interface to external memory and peripheral devices are generated by the
memory controller. The MCF5235 supports 8 external chip selects, CS[1:0] are used with external
memories, CS2 is used for the USB controller and CS[7:3] are easily accessible to users via the daughter
card expansion connectors. CS0 also functions as the global (boot) chip-select for booting out of external
flash.
Since the MCF5235 chip selects are fully programmable, the memory banks may be located at any
64-Kbyte boundary within the processor’s four gigabyte address space.
The default memory map for this board as configured by the Debug Monitor located in the external
FLASH bank can be found in table 1-2. The internal memory space of the MCF5235 is detailed further in
the MCF5235 Reference Manual. Chip Selects 0 and 1 can be changed by user software to map the external
memory in different locations but the chip select configuration such as wait states and transfer
acknowledge for each memory type should be maintained.
Chip Select Usage:
External FLASH Memory CS0
External ASRAM Memory CS1
Table 1-2 shows the M523xEVB memory map.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-7
Page 18
M523xEVB
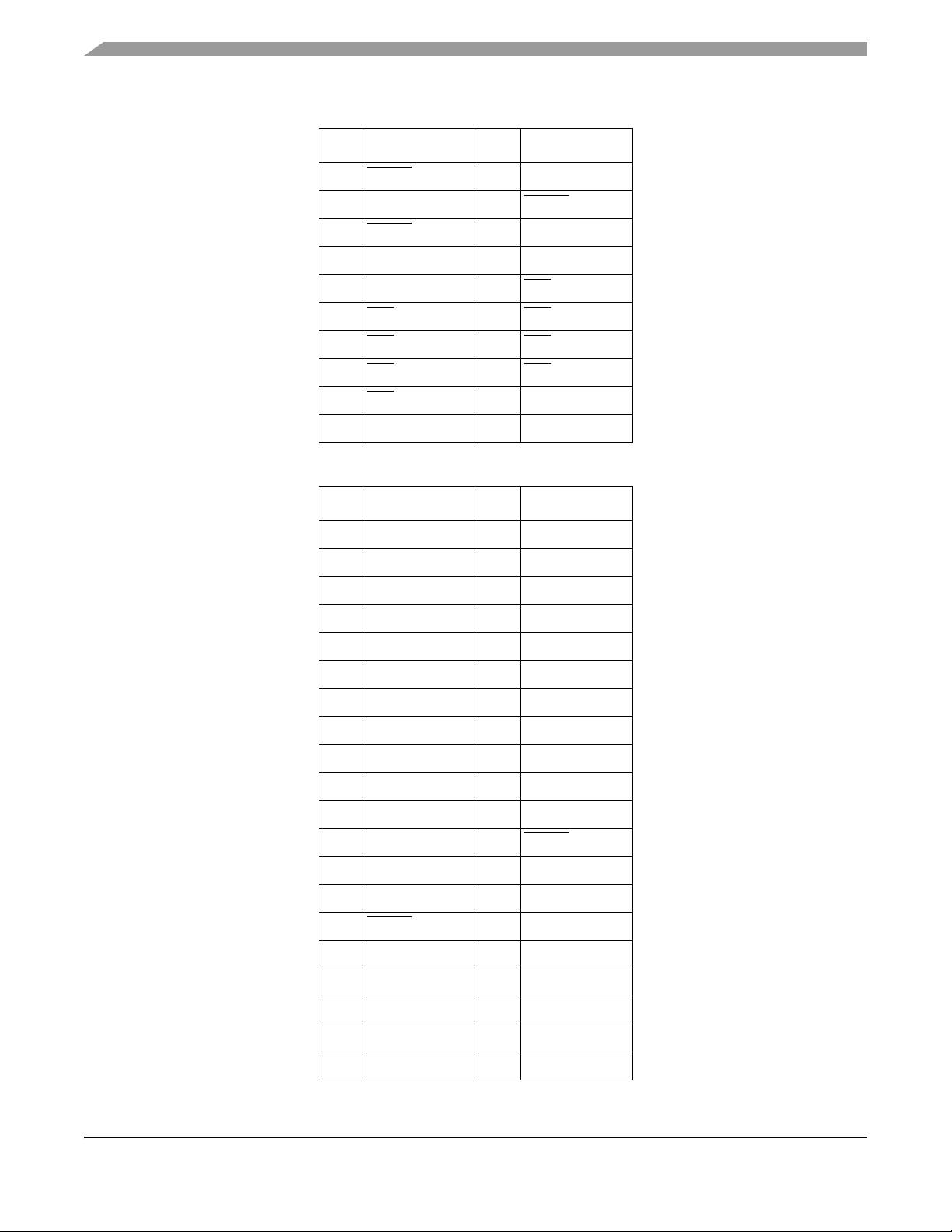
Table 1-2. The M523xEVB Default Memory Map
Address Range Signal and Device
0x0000_0000–0x00FF_FFFF 16 Mbyte SDRAM
0x2000_0000–0x2000_FFFF 64 Kbytes Internal SRAM
0x3000_0000–0x300F_FFFF External ASRAM (not fitted)
0xFFE0_0000–0xFFFF_FFFF
or
0xFFC0_0000–0xFFFF_FFFF
2 Mbytes External Flash
or
4 Mbytes External Flash
1.2.5.1 Reset Vector Mapping
Asserting the reset input signal to the processor causes a reset exception. The reset exception has the
highest priority of any exception; it provides for system initialization and recovery from catastrophic
failure. Reset also aborts any processing in progress when the reset input is recognized. Processing cannot
be recovered.
The reset exception places the processor in the supervisor mode by setting the S-bit and disables tracing
by clearing the T bit in the SR. This exception also clears the M-bit and sets the processor’s interrupt
priority mask in the SR to the highest level (level 7). Next, the VBR is initialized to zero (0x00000000).
The control registers specifying the operation of any memories (e.g., cache and/or RAM modules)
connected directly to the processor are disabled.
Once the processor is granted the bus, it then performs two longword read bus cycles. The first longword
at address 0 is loaded into the stack pointer and the second longword at address 4 is loaded into the program
counter. After the initial instruction is fetched from memory, program execution begins at the address in
the PC. If an access error or address error occurs before the first instruction is executed, the processor
enters the fault-on-fault halted state.
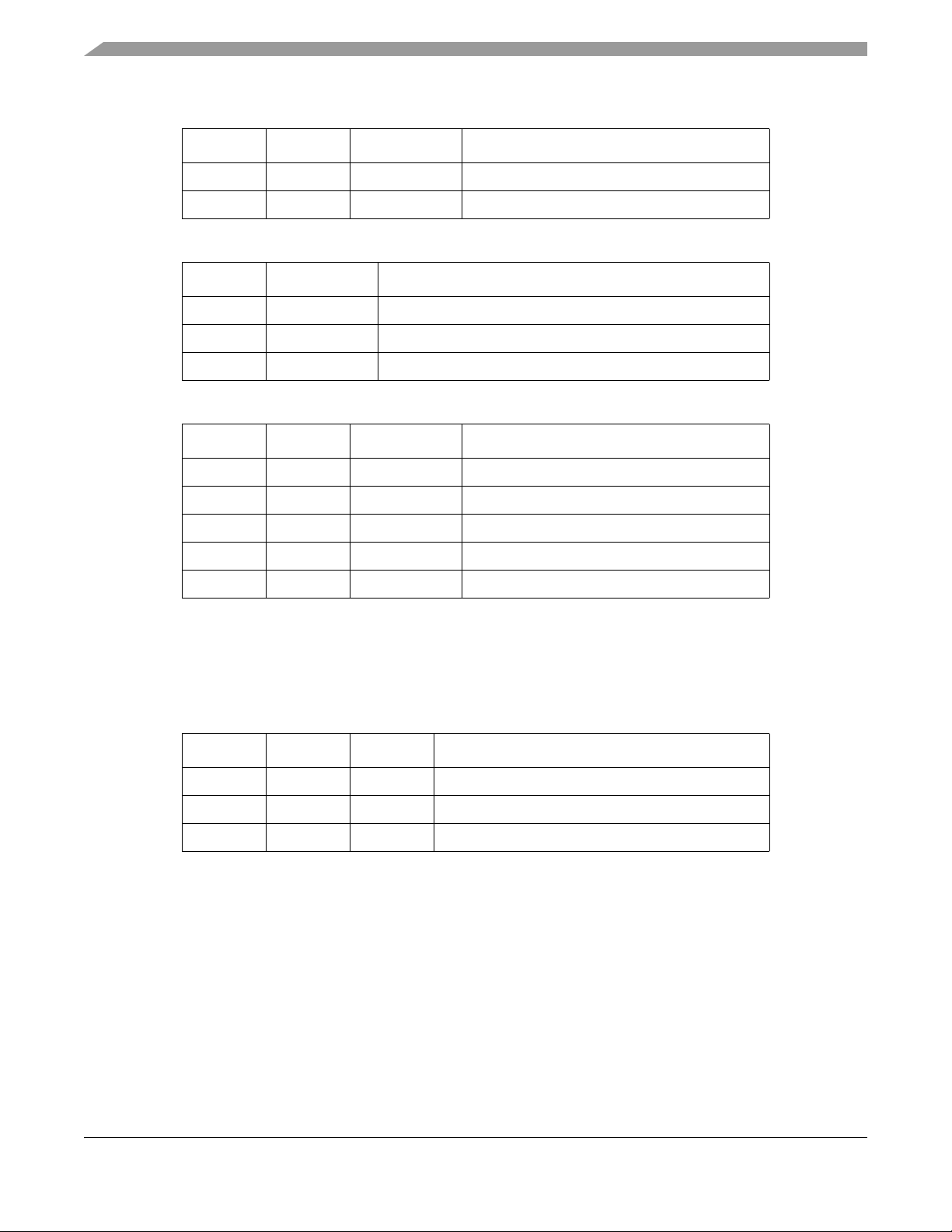
The Memory that the MCF5235 accesses at address 0 is determined at reset by sampling D[20:19].
Table 1-3. D[20:19] External Boot Chip Select Configuration
D[20:19] Boot Device/Data Port Size
00 External (32-bit)
01 External (16-bit)
10 External (8-bit)
11 External (32-bit)
1.3 Support Logic
1.3.1 Reset Logic
The reset logic provides system initialization. Reset occurs during power-on or via assertion of the signal
RESET which causes the MCF5235 to reset. RESET is triggered by the reset switch (SW6) which resets
the entire processor/system.
dBUG configures the MCF5235 microprocessor internal resources during initialization. The contents of
the exception table are copied to address 0x0000_0000 in the SDRAM. The Software Watchdog Timer is
M523xEVB User’s Manual, Rev. 1.2
1-8 Freescale Semiconductor
Page 19
Support Logic
disabled, the Bus Monitor is enabled, and the internal timers are placed in a stop condition. A memory map
for the entire board can be seen in Table 1-2.
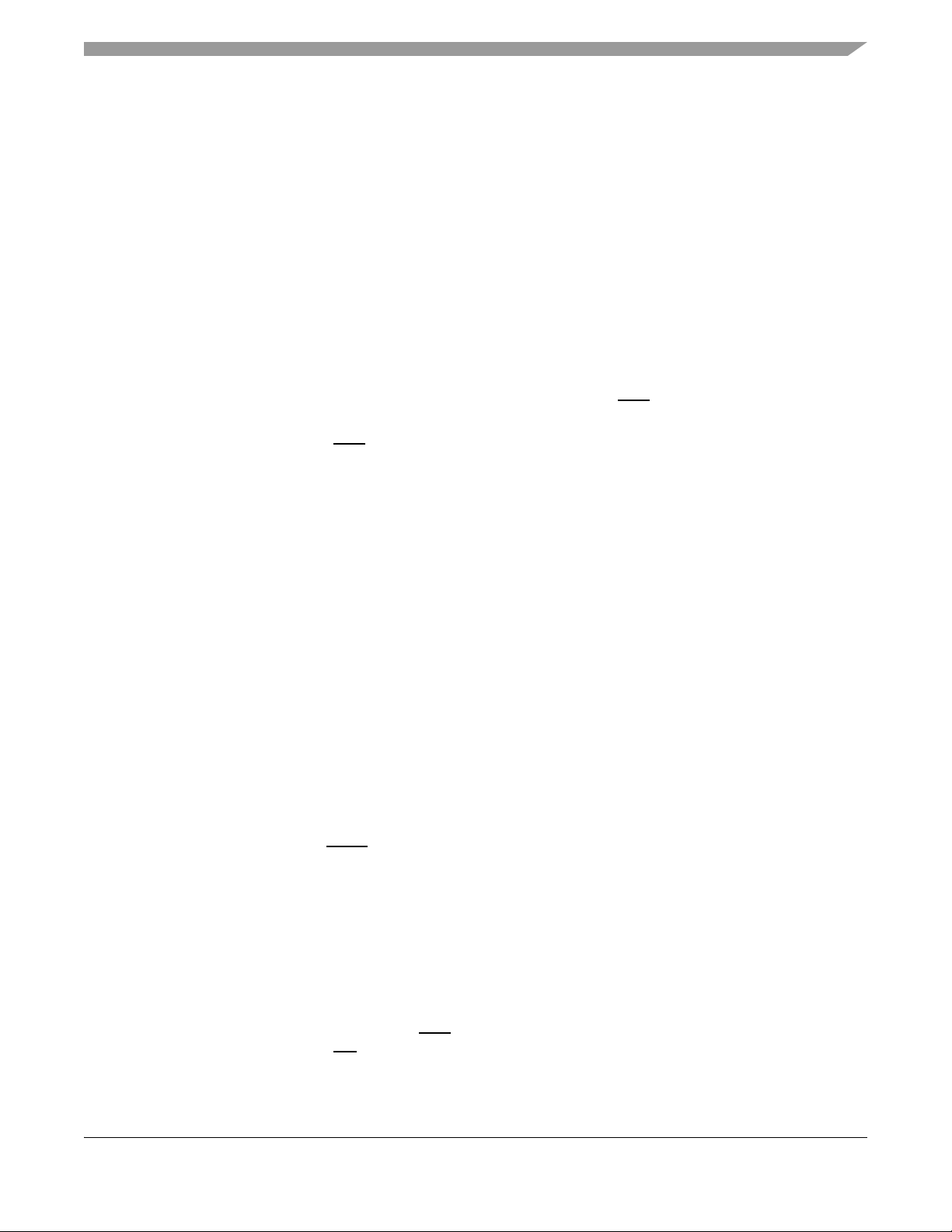
If the external RCON
pin is asserted (SW7-1 ON) during reset, then various chip functions, including the
reset configuration pin functions after reset, are configured according to the levels driven onto the external
data pins. See tables below on settings for reset configurations.
If the RCON
pin is not asserted (SW7-1 OFF) during reset, the chip configuration and the reset
configuration pin functions after reset are determined by the RCON register or fixed defaults, regardless
of the states of the external data pins.
SW7-1 Reset Configuration
OFF RCON
ON RCON is asserted, Chip functions, including the reset configuration after reset,
SW1-2 JTAG Enable
OFF JTAG interface enabled
ON BDM interface enabled
not asserted, Default Chip configuration or RCON register settings
are configured according to the levels driven onto the external data pins.
Table 1-6. SW7-[4:3] Encoded Clock Mode
SW7-3 SW7-4 Clock Mode
Table 1-4. SW7-1 RCON
Table 1-5. SW7-2 JTAG_EN
OFF OFF External clock mode- (PLL disabled)
OFF ON 1:1 PLL
ON OFF Normal PLL mode with external clock reference
ON ON Normal PLL mode w/crystal oscillator reference
Table 1-7. SW7-5 Chip Configuration Mode
SW7-5 RCON (SW7-1) Mode
OFF ON Reserved
ON ON Master
XOFF Master
Table 1-8. SW7-[7:6] Boot Device
SW7-6 SW7-7 RCON (SW7-1) Boot Device
OFF OFF ON External (32-bit)
OFF ON ON External (8-bit)
ON OFF ON External (16-bit)
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-9
Page 20
M523xEVB
Table 1-8. SW7-[7:6] Boot Device
SW7-6 SW7-7 RCON (SW7-1) Boot Device
ON ON ON External (32-bit)
X X OFF External (32-bit)
Table 1-9. SW7-8 Bus Drive Strength
SW7-8 RCON (SW7-1) Drive Strength
OFF ON Partial Bus Drive
ON ON Full Bus Drive
X OFF Partial Bus Drive
Table 1-10. SW7-[10:9] Address/Chip Select Mode
SW7-9 SW7-10 RCON (SW7-1) Mode
OFF OFF ON PADDR[7:5] = /CS[6:4]
OFF ON ON PADDR[7] = /CS6, PADDR[6:5] = A[22:21]
ON OFF ON PADDR[7:6] = /CS[6:5], PADDR[5] = A21
ON ON ON PADDR[7:5] = A[23:21]
X X OFF PADDR[7:5] = A[23:21]
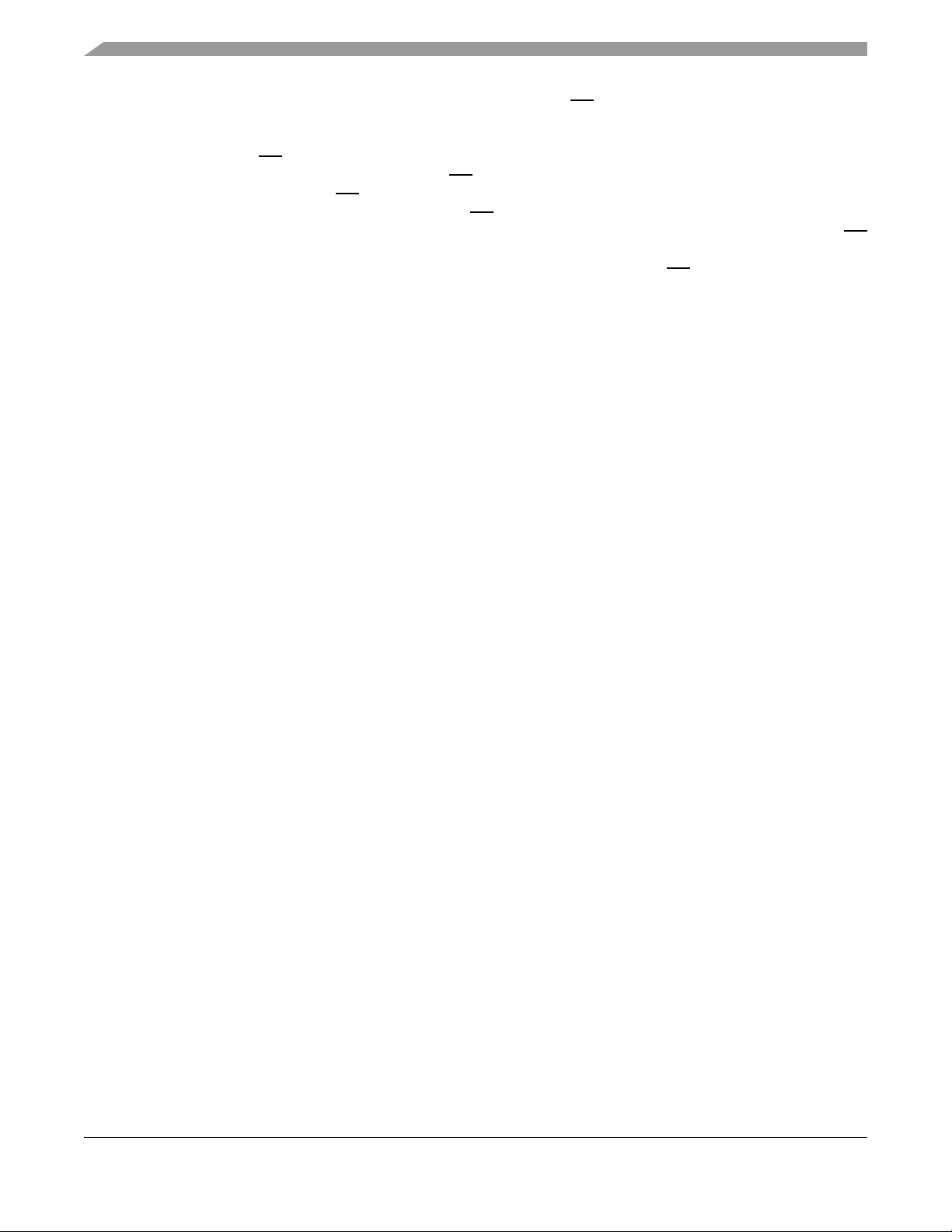
1.3.2 Clock Circuitry
The are three options to provide the clock to the CPU. These options can be configured by setting
JP[35:37]. See Table 1-11 below.
Table 1-11. M523xEVB Clock Source Selection
JP35 JP36 JP37 Clock Selection
1-2 1-2 ON 25 MHz Oscillator (default setting)
2-3 1-2 ON 25 MHz External Clock
X 2-3 OFF 25 MHz Crystal (not populated)
The 25-MHz oscillator (U23) also feeds the Ethernet chip (U11).
There is also a 12-MHz crystal feeding the USB controller (U33).
1.3.3 Watchdog Timer
The dBUG Firmware does NOT enable the watchdog timer on the MCF5235.
M523xEVB User’s Manual, Rev. 1.2
1-10 Freescale Semiconductor
Page 21
Support Logic
1.3.4 Exception Sources
The ColdFire® family of processors can receive seven levels of interrupt priorities. When the processor
receives an interrupt which has a higher priority than the current interrupt mask (in the status register), it
will perform an interrupt acknowledge cycle at the end of the current instruction cycle. This interrupt
acknowledge cycle indicates to the source of the interrupt that the request is being acknowledged and the
device should provide the proper vector number to indicate where the service routine for this interrupt level
is located. If the source of interrupt is not capable of providing a vector, its interrupt should be set up as an
autovector interrupt which directs the processor to a predefined entry in the exception table (refer to the
MCF5235 Reference Manual).
The processor goes to an exception routine via the exception table. This table is stored in the Flash
EEPROM. The address of the table location is stored in the VBR. The dBUG ROM monitor writes a copy
of the exception table into the RAM starting at $00000000. To set an exception vector, the user places the
address of the exception handler in the appropriate vector in the vector table located at $00000000 and then
points the VBR to $00000000.
The MCF5235 microprocessor has seven external interrupt request lines IRQ
[7:1]. The interrupt controller
is capable of providing up to 63 interrupt sources. These sources are:-
• External interrupt signals IRQ
[7:1] (EPORT)
• Software watchdog timer module
• Timer modules
• UART modules 0, 1 and 2
2
•I
C module
• DMA module
• QSPI module
• FEC module
•PIT
• Security module
• FlexCAN0 and FlexCAN1
•eTPU
All external interrupt inputs are edge sensitive. The active level is programmable. An interrupt request
must be held valid until an IACK cycle starts to guarantee correct processing. Each interrupt input can have
it’s priority programmed by setting the xIPL[2:0] bits in the Interrupt Control Registers apart from
interrupts 1-7 which have fixed priority already allocated to them.
No interrupt sources should have the same level and priority as another. Programming two interrupt
sources with the same level and priority can result in undefined operation.
The M523xEVB hardware uses IRQ7
to support the ABORT function using the ABORT switch (SW5).
This switch is used to force an interrupt (level 7, priority 3) if the user's program execution should be
aborted without issuing a RESET (refer to Chapter 2 for more information on ABORT). Since the ABORT
switch is not capable of generating a vector in response to a level seven interrupt acknowledge from the
processor, the dBUG programs this interrupt request for autovector mode.
Refer to MCF5235 Reference Manual for more information about the interrupt controller.
1.3.5 TA Generation
The processor starts a bus cycle by asserting CSx with the other control signals. The processor then waits
for a transfer acknowledgment (TA) either from within (Auto acknowledge - AA mode) or from the
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-11
Page 22
M523xEVB
externally addressed device before it can complete the bus cycle. TA is used to indicate the completion of
the bus cycle. It also allows devices with different access times to communicate with the processor
properly asynchronously. The MCF5235 processor, as part of the chip-select logic, has a built-in
mechanism to generate TA for all external devices which do not have the capability to generate this signal.
For example the Flash ROM cannot generate a TA signal. The chip-select logic is programmed by the
dBUG ROM Monitor to generate TA internally after a pre-programmed number of wait states. In order to
support future expansion of the M523xEVB, the TA input of the processor is also connected to the
Processor Expansion Bus (J9, pin 44). This allows any expansion boards to assert this line to provide a TA
signal to the processor. On the expansion boards this signal should be generated through an open collector
buffer with no pull-up resistor; a pull-up resistor is included on this board. All TA signals from expansion
boards should be connected to this line.
1.3.6 User’s Program
JP64 on the 16Mbit FLASH (U19) or JP31 if using 32Mbit FLASH (U35) allows users to test code from
boot/POR without having to overwrite the ROM Monitor.
When the jumper is set between pins 1 and 2, the behavior of the system is normal, dBUG boots and then
runs from 0xFFE00000 (0xFFC00000). When the jumper is set between pins 2 and 3, the board boots from
the top half of the FLASH (0xFFF00000).
Procedure:
1. Compile and link as though the code was to be placed at the base of the flash.
2. Set up the jumper JP64 (JP31) for Normal operation, pin1 connected to pin 2.
3. Download to SDRAM (If using serial or ethernet, start the ROM Monitor first. If using BDM via
a wiggler cable, download first, then start ROM Monitor by pointing the program counter (PC) to
0xFFE00400(0xFFC00400) and run.)
4. In the ROM Monitor, execute the 'FL write <dest> <src> <bytes>' command.
5. Move jumper JP64 (JP31) to pin 2 connected to pin 3 and push the reset button (SW6). User code
should now be running from reset/POR.
1.4 Communication Ports
The EVB provides external communication interfaces for two UART serial ports, a UART/FlexCAN1
port, FlexCan0 port, QSPI, I2C port, 10/100T ethernet port, eTPU port (including UNI3 and HS/ENCO
connectors for auxiliary motor control cards), USB Host port, USB Device port, and BDM/JTAG port.
1.4.1 UART0 and UART1 Ports
The MCF5235 device has three built in UARTs, each with its own software programmable baud rate
generator. Two of these UART interfaces are brought out to RS232 transceivers. One channel is the ROM
Monitor to Terminal output and the other is available to the user. The ROM Monitor programs the interrupt
level for UART0 to Level 3, priority 2 and autovector mode of operation. The interrupt level for UART1
is programmed to Level 3, priority 1 and autovector mode of operation. The signals from these channels
are available on expansion connectors J7 and J8. The signals of UART0 and UART1 are passed through
the RS-232 transceivers (U30) & (U31) and are available on DB-9 connectors (P4) and (P5).
Refer to the MCF5235 Reference Manual for programming the UART’s and their register maps.
M523xEVB User’s Manual, Rev. 1.2
1-12 Freescale Semiconductor
Page 23
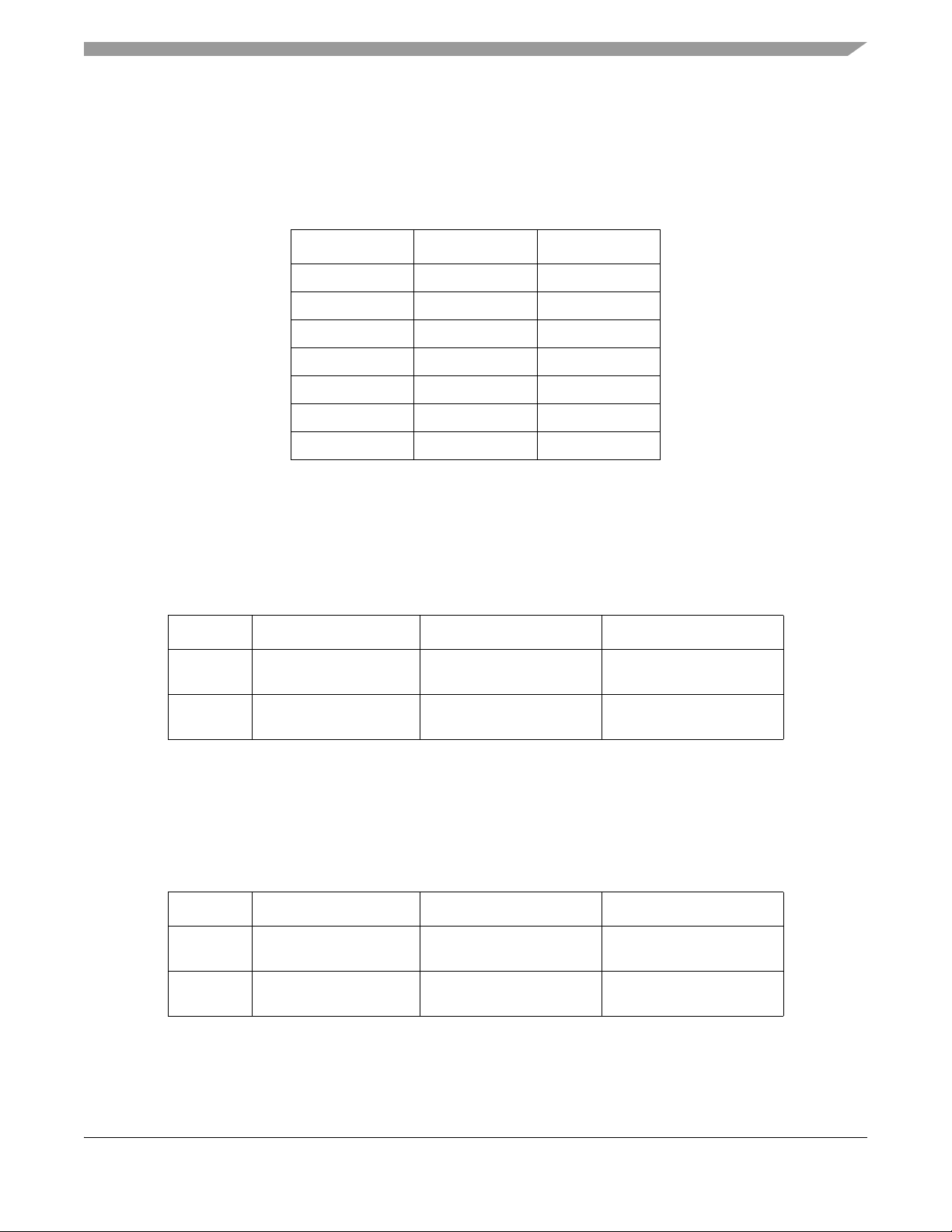
Communication Ports
1.4.2 UART2/FlexCAN1 Port
The third UART on the MCF5235 is multiplexed with the second FlexCAN (FlexCAN1) module. As these
two modules are multiplexed such that the user has access to one or the other, the functionality on the EVB
is jumper selectable. Table 1-12 shows the jumper configuration to activate UART2 or FlexCAN1.
Table 1-12. UART2/FlexCAN1 Jumper Configuration
Jumper UART2 Setting FlexCAN1 Setting
JP7 1-2 2-3
JP12 1-2 2-3
JP25 2-3 X
JP26 2-3 X
JP50 2-3 1-2
JP51 2-3 1-2
JP52 2-3 1-2
The signals of UART2 are passed through RS-232 transceiver U32 and are jumper selectable (for settings
see Table 1-12) on DB-9 connector P6.
The CAN1TX and CAN1RX signals from FlexCAN1 are brought out to a 3.3-V CAN transceiver (Texas
Instruments - SN65HVD230D) and are jumper selectable (for settings see Table 1-12) on DB-9 connector
P6. Jumpers JP3 and JP4 control the CAN hardware configuration.
Table 1-13. FlexCAN1 Jumper Configuration
Jumper Function ON OFF
JP3 Transceiver mode Standby High Speed (No Slope
Control)
JP4 CAN Termination Terminating resistor
between CANL and CANH
No terminating resistor
1.4.3 FlexCAN0 Port
The EVB provides 1 dedicated CAN transceiver. The CAN0TX and CAN0RX signals are brought out to
a 3.3V CAN transceiver (Texas Instruments - SN65HVD230D). Jumper JP1 and JP2 control the CAN
hardware configuration.
Table 1-14. FlexCAN0 Jumper Configuration
Jumper Function ON OFF
JP1 Transceiver mode Standby High Speed (No Slope
Control)
JP2 CAN Termination Terminating resistor
between CANL and CANH
No terminating resistor
The CANL and CANH signals are brought out from the CAN transceiver to a female DB-9 connector (P1)
in the configuration below.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-13
Page 24
M523xEVB
Table 1-15. CAN Bus Connector Pinout
DB-9 pin Signal
1,4-6,7-9 Not Connected
2CANL
3 Ground
7CANH
1.4.4 10/100T Ethernet Port
The MCF5235 microprocessor populated on the EVB is a superset device of the MCF523x family. The
upper 16 eTPU channels are multiplexed with the ethernet port giving the EVB user the choice of utilizing
either the full 32-channels of eTPU or 16-channels of eTPU with the Fast Ethernet Controller (FEC)
activated. Pin M4 on the MCF5235 configures the internal functionality of these 16 pins. If the user is
using the FEC, pin M4 must be pulled low by setting SW7-11 to the ON position.
These 16 pins are also jumper selectable between the eTPU and the FEC in order to isolate the external
circuitry required to implement the functionality of these modules. Table 1-16 lists the appropriate jumper
settings to enable eTPU or FEC functionality on these pins.
The MCF5235 device performs the full set of IEEE 802.3/Ethernet CSMA/CD media access control and
channel interface functions. The MCF5235 Ethernet Controller requires an external interface adaptor and
transceiver function to complete the interface to the ethernet media. The MCF5235 Ethernet module also
features an integrated fast (100baseT) Ethernet media access controller (MAC).
The Fast Ethernet controller (FEC) incorporates the following features:
• Support for three different Ethernet physical interfaces:
— 100-Mbps IEEE 802.3 MII
— 10-Mbps IEEE 802.3 MII
— 10-Mbps 7-wire interface (industry standard)
• IEEE 802.3 full duplex flow control
• Programmable max frame length supports IEEE 802.1 VLAN tags and priority
• Support for full-duplex operation (200Mbps throughput) with a minimum system clock rate of
50 MHz
• Support for half-duplex operation (100Mbps throughput) with a minimum system clock rate of
25 MHz
• Retransmission from transmit FIFO following a collision (no processor bus utilization)
• Automatic internal flushing of the receive FIFO for runts (collision fragments) and address
recognition rejects (no processor bus utilization)
• Address recognition
— Frames with broadcast address may be always accepted or always rejected
— Exact match for single 48-bit individual (unicast) address
— Hash (64-bit hash) check of individual (unicast) addresses
— Hash (64-bit hash) check of group (multicast) addresses
— Promiscuous mode
M523xEVB User’s Manual, Rev. 1.2
1-14 Freescale Semiconductor
Page 25
Communication Ports
For more details see the MCF523x Reference Manual. The on board ROM MONITOR is programmed to
allow a user to download files from a network to memory in different formats. The current compiler
formats supported are S-Record, COFF, ELF or Image.
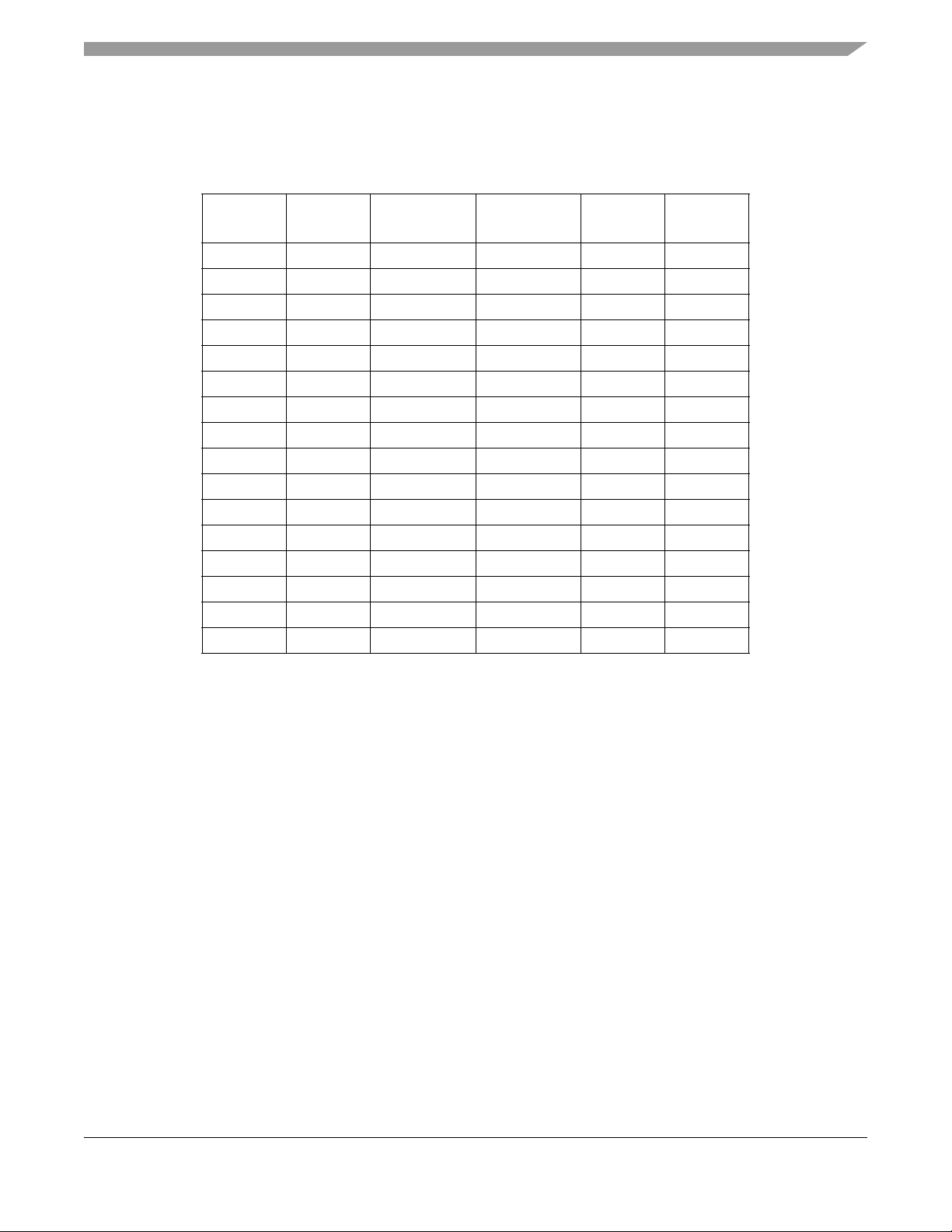
Table 1-16. Ethernet/eTPU Jumper Configuration
Jumper Pin
JP5 D5 2-3 ERXER 1-2 23
JP9 C5 2-3 ETXCLK 1-2 22
JP10 B5 2-3 ETXD2 1-2 18
JP11 A5 2-3 ETXD1 1-2 17
JP13 D6 2-3 ETXEN 1-2 21
JP14 C6 2-3 ETXER 1-2 20
JP15 B6 2-3 ETXD3 1-2 19
JP16 C4 2-3 ERXD0 1-2 24
JP17 B7 2-3 ETXD0 1-2 16
JP18 C3 2-3 ERXD1 1-2 25
JP19 D4 2-3 ERXD2 1-2 26
JP20 D3 2-3 ERXD3 1-2 27
JP21 E3 2-3 ERXCLK 1-2 29
JP22 E4 2-3 ERXDV 1-2 28
JP23 F3 2-3 ECOL 1-2 31
JP24 F4 2-3 ECRS 1-2 30
Ethernet
Setting
Ethernet
Signal
eTPU
Setting
eTPU
Channel
1.4.5 eTPU
The eTPU is an intelligent programmable I/O controller with its own core and memory system, allowing
it to perform complex timing and I/O management independently of the CPU. The eTPU is essentially a
co-processor designed for timing control, I/O handling, serial communications, motor control. and engine
control applications and accesses data without the host CPU’s intervention. Consequently, the host CPU
setup and service times for each timer event are minimized or eliminated.
The eTPU is an enhanced version of the TPU module implemented on the MC68332 and MPC500
products. Enhancements of the eTPU include a more powerful processor which handles high-level C code
efficiently and allows for more functionality and increased performance. Although there is no
compatibility at microcode level, the eTPU maintains several features of older TPU versions and is
conceptually almost identical. The eTPU library is a superset of the standard TPU library functions
modified to take advantage of enhancements in the eTPU. These, along with a C compiler, make it
relatively easy to port older applications. By providing source code for the Motorola library, it is possible
for the eTPU to support the users own function development.
The eTPU has up to 32 timer channels in addition to having 6 Kbytes of code memory and 1.5 Kbytes of
data memory that stores software modules downloaded at boot time and that can be mixed and matched as
required for any specific application.
As mentioned in Section 1.4.4, “10/100T Ethernet Port,” the upper 16-channels of the eTPU are
multiplexed with the Fast Ethernet Controller.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-15
Page 26
M523xEVB
Refer to Table 1-16 to set the appropriate jumpers to enable 16 or 32-channels.
To configure the device to operate with the top 16-channels of the eTPU activated, pin M4 must be pulled
high by setting SW7-11 to the OFF position.
All 32 eTPU channels are available on a 0.1” 2x20 Molex connector providing easy access to the eTPU
for the EVB user.
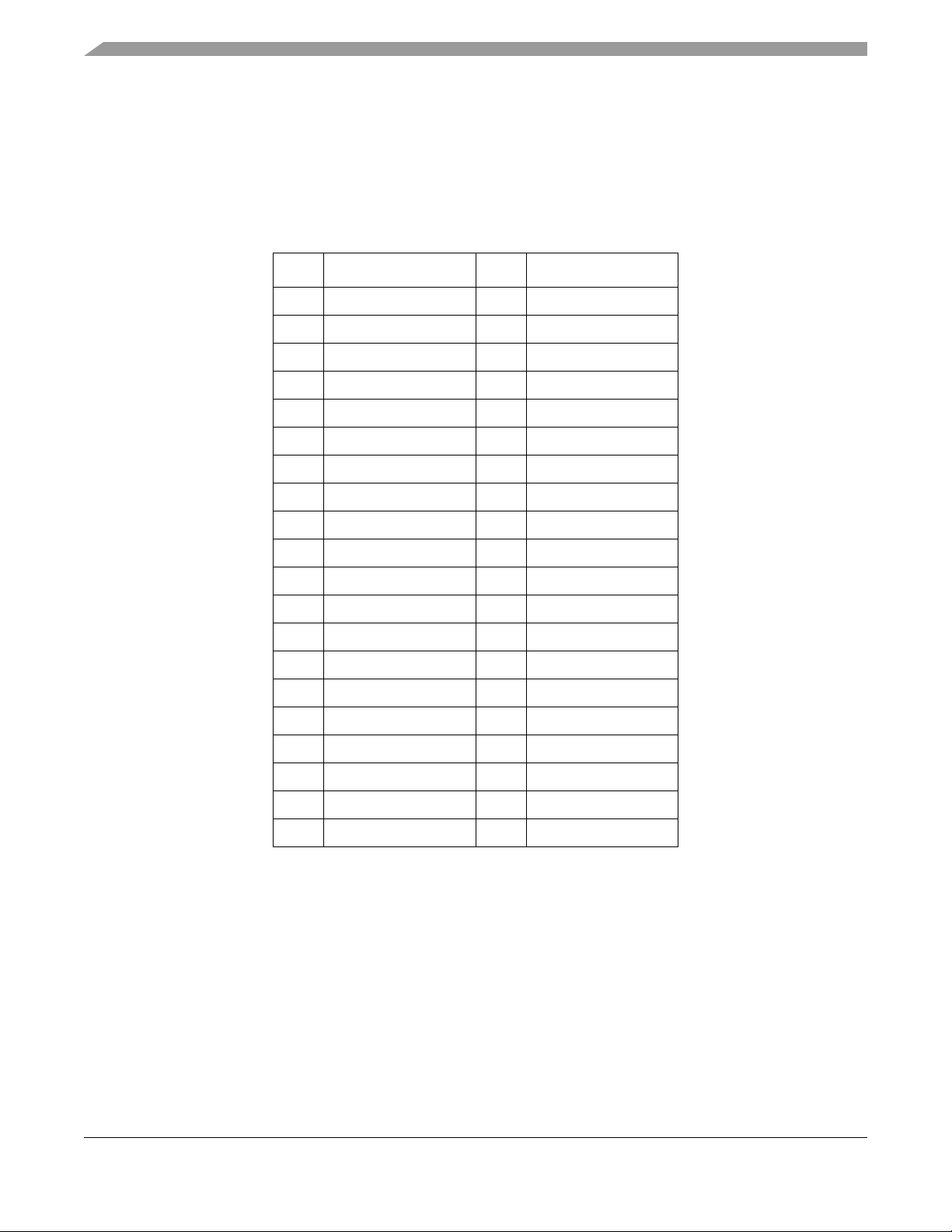
Table 1-17. eTPU Header Pin Assignment
Pin eTPU Signal Pin eTPU Signal
1 +3.3V 2 +5V
3 TPUCH16 4 UTPUODIS
5 TPUCH17 6 LTPUODIS
7TPUCH18 8TPUCH0
9 TPUCH19 10 TPUCH1
11 TPUCH20 12 TPUCH2
13 TPUCH21 14 TPUCH3
15 TPUCH22 16 TPUCH4
17 TPUCH23 18 TPUCH5
19 TPUCH24 20 TPUCH6
21 TPUCH25 22 TPUCH7
23 TPUCH26 24 TPUCH8
25 TPUCH27 26 TPUCH9
27 TPUCH28 28 TPUCH10
29 TPUCH29 30 TPUCH11
31 TPUCH30 32 TPUCH12
33 TPUCH31 34 TPUCH13
35 GND 36 TPUCH14
37 TCRCLK 38 TPUCH15
39 GND 40 GND
There is a UNI3 connector and HS/ENCO connector on the EVB for connection to an auxiliary card.
The auxiliary card is intended for evaluation of the eTPU functionality.
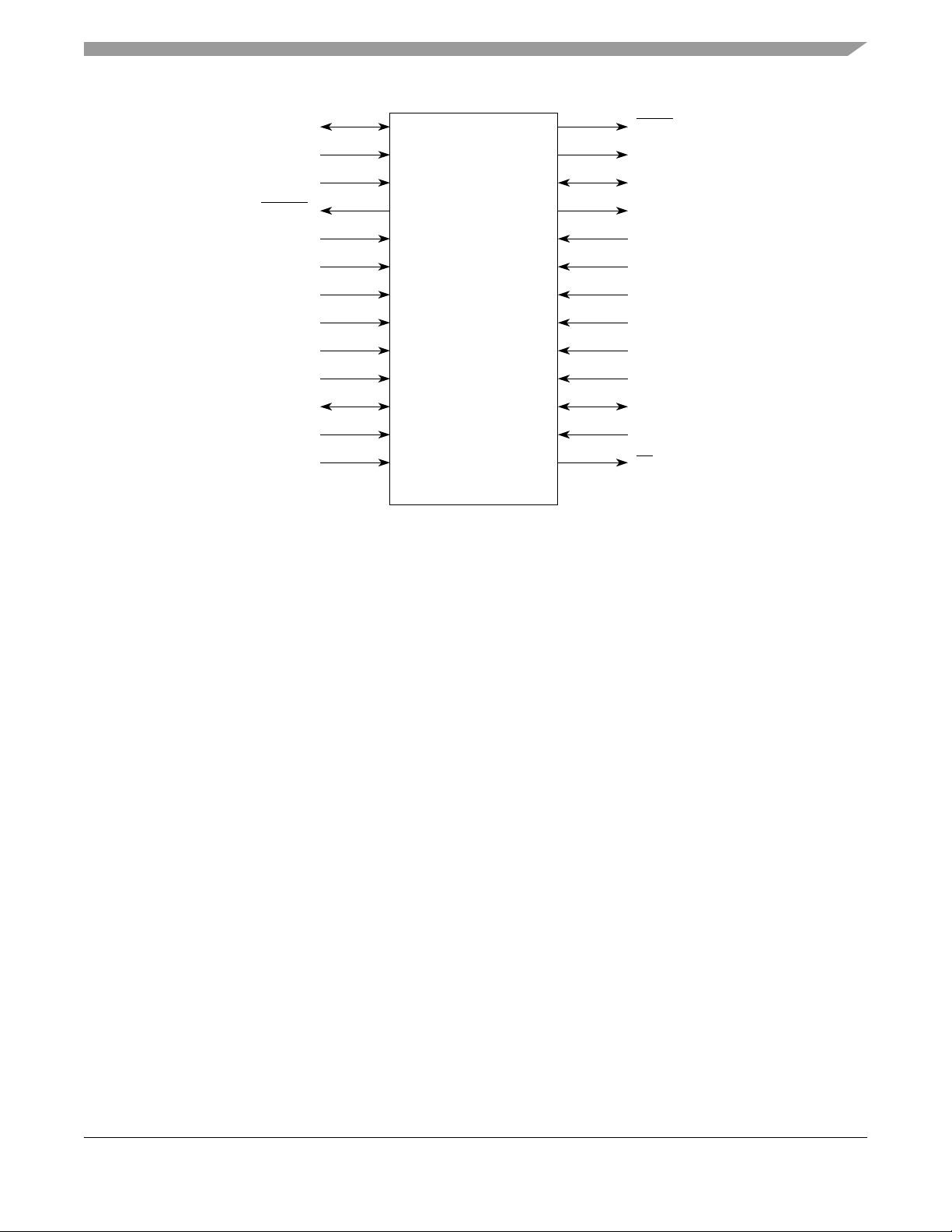
1.4.6 BDM/JTAG Port
The MCF5235 processor has a Background Debug Mode (BDM) port, which supports Real-Time Trace
and Real-Time Debug. The signals which are necessary for debug are available at connector (J1).
Figure 1-4 shows the (J1) Connector pin assignment.
M523xEVB User’s Manual, Rev. 1.2
1-16 Freescale Semiconductor
Page 27
Communication Ports
DEVELOPER RESERVED
GND
GND
RESET
I/O or Pad Voltage
GND
PST2
PST0
DDATA2
DDATA0
MOTOROLA RESERVED
GND
Core Voltage
11
13
15
17
19
21
23
25
1
3
5
7
9
2
4
6
8
10
12
14
16
18
20
22
24
26
BKPT
DSCLK
DEVELOPER RESERVED
DSI
DSO
PST3
PST1
DDATA3
DDATA1
GND
MOTOROLA RESERVED
PSTCLK
TA
Figure 1-4. J1- BDM Connector Pin Assignment
The BDM connector can also be used to interface to JTAG signals. On reset, the JTAG_EN signal selects
between multiplexed debug module and JTAG signals. See Table 1-5.
1.4.7 I2C
The MCF5235’s I2C module includes the following features:
2
• Compatibility with the I
• Multi master operation
• Software programmable for one of 50 different clock frequencies
• Software selectable acknowledge bit
• Interrupt driven byte by byte data transfer
• Arbitration-lost interrupt with automatic mode switching from master to slave
• Calling address identification interrupt
• Start and stop signal generation and detection
• Repeated start signal generation
• Acknowledge bit generation and detection
• Bus busy detection
Please see the MCF523x Reference Manual for more detail. The I
are brought out to expansion connector (J13).
2
The I
C functionality of the MCF5235 is multiplexed on the same pins as the QSPI. Jumpers JP6 and JP8
are used to connect/disconnect the I2C signals, SDA and SCL. To enable I2C JP6 and JP8 should be set
between pins 2 and 3.
C bus standard version 2.1
2
C signals from the MCF5235 device
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-17
Page 28

M523xEVB
1.4.8 QSPI
The QSPI (Queued Serial Peripheral Interface) module provides a serial peripheral interface with queued
transfer capability. It will support up to 16 stacked transfers at one time, minimizing CPU intervention
between transfers. Transfer RAMs in the QSPI are indirectly accessible using address and data registers.
Functionality is very similar, but not identical, to the QSPI portion of the QSM (Queued Serial Module)
implemented in the MC68332 processor.
• Programmable queue to support up to 16 transfers without user intervention
• Supports transfer sizes of 8 to 16 bits in 1-bit increments
• Four peripheral chip-select lines for control of up to 15 devices
• Baud rates from 147.1-Kbps to 18.75-Mbps at 75 MHz.
• Programmable delays before and after transfers
• Programmable QSPI clock phase and polarity
• Supports wrap-around mode for continuous transfers
Please see the MCF523x Reference Manual for more detail. The QSPI signals from the MCF5235 device
are brought out to expansion connector (J12).
Some of the QSPI signals are multiplexed with the I
and 2 to enable the QSPI module.
The EVB features an A to D converter (ADC) interfaced to the CPU via the QSPI. The ADC uses QSPI
chip select 0. This chip select has a jumper that can be removed if the EVB user is not using the ADC and
wishes to connect QSPI_CS0 to an alternative device.
2
C module. JP6 and JP8 should be set between pins 1
1.4.9 USB Host and Device
The EVB features a USB controller interfaced externally to the MCF5235 via the DMA and external bus
modules. The USB controller can be configured to run in Host or Device mode.
There is a series “A” connector (Host) and a series “B” connector (Device) populated on the EVB. Either
one or the other can be used depending on whether the USB controller is configured to run in Host or
Device mode. JP56 must be set between pins 2 and 3 if the controller is configured in Host mode and
between pin 1 and 2 if the controller is configured in Device mode.
The USB controller also has On-The-Go (OTG) functionality. There is a footprint on the EVB for an OTG
Mini-AB connector if the user wants to utilize USB OTG. If using OTG JP55 must be fitted.
For more details see the Philips Semiconductor datasheet for the ISP1362 USB OTG controller.
There are a series of jumpers connected to the USB controller that allow the user to disconnect the DMA
and interrupt signals between the CPU and the USB controller if the USB controller is not in use. This
gives the user access to the DMA timer module channels 1 and 2 and an extra interrupt signal if they do
not require USB functionality. Table 1-18 details these jumper settings.
Table 1-18. USB DMA Enable and Disable Settings
Jumper Functionality when Jumper is Fitted Functionality when Jumper is NOT Fitted
JP57 USB DMA request signal DMA Timer 1 input enabled
JP58 USB DMA request signal DMA Timer 2 input enabled
JP59 USB DMA acknowledge signal DMA Timer 2 output enabled
M523xEVB User’s Manual, Rev. 1.2
1-18 Freescale Semiconductor
Page 29
Connectors and User Components
Table 1-18. USB DMA Enable and Disable Settings
Jumper Functionality when Jumper is Fitted Functionality when Jumper is NOT Fitted
JP60 USB DMA acknowledge signal DMA Timer 1 output enabled
JP61 DACK1 not in use - pulled high DMA acknowledge 1 enabled
JP62 Interrupt 4 enabled for USB Interrupt 4 disabled from USB
JP63 DACK2 not in use - pulled high DMA acknowledge 2 enabled
1.5 Connectors and User Components
1.5.1 Daughter Card Expansion Connectors
Four, 60-way SMT connectors (J7, J8, J9 and J10) provide access to all MCF5235 signals. These
connectors are ideal for interfacing to a custom daughter card or for simple probing of processor signals.
Below is a pinout description of these connectors.
Table 1 - 1 9 . J 7
Pin Signal Pin Signal
1+5V 2+5V
3 +3.3V 4 +3.3V
5 +3.3V 6 +3.3V
7GND 8GND
9 TPUCH24 10 TPUCH6
11 TPUCH17 12 TPUCH4
13 TPUCH18 14 TPUCH5
15 TPUCH22 16 TPUCH2
17 TPUCH23 18 TPUCH3
19 TPUCH19 20 TPUCH1
21 TPUCH20 22 TPUCH0
23 TPUCH21 24 GND
25 TPUCH16 26 EMDIO
27 U2CTS
29 I2C_SCL 30 I2C_SDA
31 QSPI_SCK 32 QSPI_DIN
33 BS3 34 QSPI_DOUT
28 EMDC
35 BS2 36 QSPI_PCS0
37 BS1
39 BS0 40 CAN1RX
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-19
38 SD_SCKE
Page 30
M523xEVB
Table 1-19. J7 (continued)
Pin Signal Pin Signal
41 U2RTS
43 QSPI_PCS1 44 U1CTS
45 U1RTS 46 CAN1TX
47 U1RXD 48 U2TXD
49 U1TXD 50 CS2
51 CS3 52 CS7
53 CS6 54 CS5
55 CS1 56 CS0
57 CS4 58 A23
59 GND 60 GND
42 U2RXD
Table 1 - 2 0 . J 8
Pin Signal Pin Signal
1 +5V 2 +1.5V
3 +3.3V 4 +3.3V
5 TPUCH8 6 TPUCH7
7 TPUCH10 8 TPUCH9
9 TPUCH25 10 TPUCH12
11 TPUCH27 12 TPUCH11
13 TPUCH26 14 TPUCH14
15 TPUCH29 16 TPUCH13
17 TPUCH28 18 TCRCLK
19 TPUCH31 20 TPUCH15
21 TPUCH30 22 GND
23 GND 24 U0CTS
25 U0RXD 26 DTOUT0
27 DTIN0 28 U0TXD
29 U0RTS 30 GND
31 CLKMOD0 32 +3.3V
33 CLKMOD1 34 GND
35 GND 36 D28
37 D30 38 D29
39 D31 40 D24
M523xEVB User’s Manual, Rev. 1.2
1-20 Freescale Semiconductor
Page 31

Table 1-20. J8 (continued)
Pin Signal Pin Signal
41 D26 42 D25
43 D27 44 D21
45 D23 46 D22
Connectors and User Components
47 EXT_RSTIN
49 GND 50 GND
51 D13 52 D20
53 D9 54 D17
55 D12 56 D18
57 D15 58 D16
59 GND 60 GND
48 D19
Table 1 - 2 1 . J 9
Pin Signal Pin Signal
1 +5V 2 +1.5V
3 +3.3V 4 +3.3V
5 +3.3V 6 +3.3V
7GND 8GND
9A21 10A22
11 A19 12 A20
13 A17 14 A18
15 A16 16 A14
17 A15 18 A11
19 A13 20 GND
21 GND 22 A10
23 A12 24 A8
25 A9 26 A7
27 A6 28 A4
29 A5 30 GND
31 A2 32 A0
33 A3 34 A1
35 GND 36 GND
37 DTIN3 38 UTPUODIS
39 DTOUT3 40 LTPUODIS
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-21
Page 32

M523xEVB
Table 1-21. J9 (continued)
Pin Signal Pin Signal
41 TIP
43 TS 44 TA
45 CAN0RX 46 SD_WE
47 R/W 48 CAN0TX
49 SD_CAS 50 SD_CS0
51 CLKOUT 52 SD_RAS
53 SD_CS1 54 DDATA3
55 XTAL 56 EXTAL
57 GND 58 GND
59 GND 60 GND
42 TEA
Table 1-22. J10
Pin Signal Pin Signal
1 +5V 2 +1.5V
3 +3.3V 4 +3.3V
5D14 6D10
7D11 8D6
9D7 10D8
11 D5 12 D4
13 GND 14 GND
15 D1 16 D2
17 D3 18 OE
19 D0 20 DTOUT1
21 DTIN1 22 +3.3V
23 +3.3V 24 IRQ6
25 IRQ7 26 TSIZ0
27 TSIZ1 28 IRQ2
29 IRQ3 30 IRQ4
31 IRQ5 32 TCLK/PSTCLK
33 DTOUT2 34 DTIN2
35 IRQ1
37 TDO/DSO 38 TMS/BKPT
39 TRST/DSCLK 40 GND
36 TDI/DSI
M523xEVB User’s Manual, Rev. 1.2
1-22 Freescale Semiconductor
Page 33

Connectors and User Components
Table 1-22. J10 (continued)
Pin Signal Pin Signal
41 GND 42 PST3
43 PST1 44 PST2
45 PST0 46 DDATA0
47 DDATA2 48 DDATA1
49 GND 50 GND
51 JTAG_EN 52 RCON
53 GND 54 RSTOUT
55 GND 56 RESET
57 GND 58 GND
59 GND 60 GND
1.5.2 Reset Switch (SW6)
The reset logic provides system initilization. Reset occurs during power-on or via assertion of the signal
RESET which causes the MCF5235 to reset. Reset is also triggered by the reset switch (SW6) which resets
the entire processor/system.
A hard reset and voltage sense controller (U25) is used to produce an active low power-on RESET signal.
The reset switch SW6 is fed into U25 which generates the signal which is fed to the MCF5235 reset,
RESET
. The RESET signal is an open collector signal and so can be wire OR’ed with other reset signals
from additional peripherals. On the EVB, RESET is wire OR’d with the BDM reset signal and there is a
reset signal brought out to the expansion connectors for use with user hardware.
dBUG configures the MCF5235 microprocessor internal resources during initialization. The instruction
cache is invalidated and disabled. The Vector Base Register, VBR, contains an address which initially
points to the Flash memory. The contents of the exception table are written to address $00000000 in the
SDRAM. The Software Watchdog Timer is disabled, the Bus Monitor is enabled, and the internal timers
are placed in a stop condition. The interrupt controller registers are initialized with unique interrupt
level/priority pairs.
1.5.3 User LEDs
There are eight LEDs available to the user. Each of these LEDs are pulled to +3.3V through a 10 ohm
resistor and can be illuminated by driving a logic “0” on the appropriate signal to “sink” the current. Each
of these signals can be disconnected from it’s associated LED with a jumper. The table below details which
MCF5235 signal is associated with which LED.
Table 1-23. User LEDs
LED MCF5235 Signal Jumper to disconnect
D25 DTOUT0 JP38
D26 DTIN0 JP39
D27 DTOUT1 JP40
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 1-23
Page 34

M523xEVB
Table 1-23. User LEDs
LED MCF5235 Signal Jumper to disconnect
D28 DTIN1 JP41
D29 DTOUT2 JP42
D30 DTIN2 JP43
D31 DTOUT3 JP44
D32 DTIN3 JP45
1.5.4 Other LEDs
There are several other LED’s on the M523xEVB to signal to the user various board/processor/component
states. Below is a list of those LEDs and their functions:
Table 1-24. LED Functions
LED Function
D1-D4 Ethernet Phy functionality
D5-D12 eTPU functionality
D14 +3.3V Power Good
D17 +5V Power Good
D23 Abort (IRQ7
D24 Reset (RSTI) asserted
D25-D32 User LEDs (See Table 1-23)
) asserted
M523xEVB User’s Manual, Rev. 1.2
1-24 Freescale Semiconductor
Page 35

Chapter 2 Initialization and Setup
2.1 System Configuration
The M523xEVB board requires the following items for minimum system configuration:
• The M523xEVB board (provided).
• Power supply, +7V to 14V DC with minimum of 300 mA.
• RS232C compatible terminal or a PC with terminal emulation software.
• RS232 Communication cable (provided).
Figure 2-1 displays the minimum system configuration.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 2-1
Page 36

Initialization and Setup
RS-232 Terminal
Or PC
dBUG>
Figure 2-1. Minimum System Configuration
+7 to +14VDC
Input Power
M523xEVB User’s Manual, Rev. 1.2
2-2 Freescale Semiconductor
Page 37

Installation and Setup
2.2 Installation and Setup
The following sections describe all the steps needed to prepare the board for operation. Please read the
following sections carefully before using the board. When you are preparing the board for the first time,
be sure to check that all jumpers are in the default locations. Default jumper markings are documented on
the master jumper table and printed on the underside of the board. After the board is functional in its
default mode, the Ethernet interface may be used by following the instructions provided in Appendix A.
2.2.1 Unpacking
Unpack the computer board from its shipping box. Save the box for storing or reshipping. Refer to the
following list and verify that all the items are present. You should have received:
•M523xEVB Single Board Computer
•M523xEVB User's Manual (this document)
• One RS232 communication cable
• One BDM (Background Debug Mode) “wiggler” cable
• MCF5235 ColdFire Integrated Microprocessor Reference Manual
• ColdFire® Programmers Reference Manual
• A selection of Third Party Developer Tools and Literature
NOTE
Avoid touching the MOS devices. Static discharge can and will damage
these devices.
Once you have verified that all the items are present, remove the board from its protective jacket and
anti-static bag. Check the board for any visible damage. Ensure that there are no broken, damaged, or
missing parts. If you have not received all the items listed above or they are damaged, please contact
Freescale Semiconductor immediately. For contact details, please see the front of this manual.
2.2.2 Preparing the Board for Use
The board, as shipped, is ready to be connected to a terminal and power supply without any need for
modification. Figure 2-5 shows the position of the jumpers and connectors.
2.2.3 Providing Power to the Board
The EVB requires an external supply voltage of 7–14 V DC, minimum 1 Amp. This is regulated on board
using three switching voltage regulators to provide the necessary EVB voltages of 5V, 3.3V and 1.5V.
There are two different power supply input connectors on the EVB. Connector P2 is a 2.1mm power jack
(Figure 2-2), P3 a lever actuated connector (Figure 2-3).
Figure 2-2. 2.1mm Power Connector
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 2-3
Page 38

Initialization and Setup
V+(7-14V)
GND
Figure 2-3. 2-Lever Power Connector
2.2.4 Power Switch (SW4)
Slide switch SW4 can be used to isolate the power supply input from the EVB voltage regulators if
required.
Moving the slide switch to the left (towards connector P3) will turn the EVB ON.
Moving the slide switch to the right (away from connector P3) will turn the EVB OFF.
2.2.5 Power Status LEDs and Fuse
When power is applied to the EVB, green power LEDs adjacent to the voltage regulators show the
presence of the supply voltage as follows:
Table 2-1. Power L E Ds
LED Function
D17 Indicates that the +5V regulator is working correctly
D14 Indicates that the +3.3V regulator is working correctly
If no LEDs are illuminated when the power is applied to the EVB, it is possible that either power switch
SW4 is in the “OFF” position or that the fuse F1 has blown. This can occur if power is applied to the EVB
in reverse-bias where a protection diode ensures that the fuse blows rather than causing damage to the
EVB. Replace F1 with a 20mm 1A fast blow fuse.
2.2.6 Selecting Terminal Baud Rate
The serial channel UART0 of the MCF5235 is used for serial communication and has a built in timer. This
timer is used by the dBUG ROM monitor to generate the baud rate used to communicate with a serial
terminal. A number of baud rates can be programmed. On power-up or manual RESET, the dBUG ROM
monitor firmware configures the channel for 19200 baud. Once the dBUG ROM monitor is running, a SET
command may be issued to select any baud rate supported by the ROM monitor.
M523xEVB User’s Manual, Rev. 1.2
2-4 Freescale Semiconductor
Page 39

Installation and Setup
2.2.7 The Terminal Character Format
The character format of the communication channel is fixed at power-up or RESET. The default character
format is 8 bits per character, no parity and one stop bit with no flow control. It is necessary to ensure that
the terminal or PC is set to this format.
2.2.8 Connecting the Terminal
The board is now ready to be connected to a PC/terminal. Use the RS-232 serial cable to connect the
PC/terminal to the M523xEVB PCB. The cable has a 9-pin female D-sub terminal connector at one end
and a 9-pin male D-sub connector at the other end. Connect the 9-pin male connector to connector P4 on
the M523xEVB board. Connect the 9-pin female connector to one of the available serial communication
channels normally referred to as COM1 (COM2, etc.) on the PC running terminal emulation software. The
connector on the PC/terminal may be either male 25-pin or 9-pin. It may be necessary to obtain a
25pin-to-9pin adapter to make this connection. If an adapter is required, refer to Figure 2-4.
2.2.9 Using a Personal Computer as a Terminal
A personal computer may be used as a terminal provided a terminal emulation software package is
available. Examples of this software are PROCOMM, KERMIT, QMODEM, Windows 95/98/2000/XP
Hyper Terminal or similar packages. The board should then be connected as described in Section 2.2.8,
“Connecting the Terminal.”
Once the connection to the PC is made, power may be applied to the PC and the terminal emulation
software can be run. In terminal mode, it is necessary to select the baud rate and character format for the
channel. Most terminal emulation software packages provide a command known as "Alt-p" (press the p
key while pressing the Alt key) to choose the baud rate and character format. The character format should
be 8 bits, no parity, one stop bit. (see 2.2.7, “The Terminal Character Format”) The baud rate should be set
to 19200. Power can now be applied to the board.
5
Figure 2-4. Pin Assignment for Female (Terminal) Connector
1
69
Pin assignments are as follows:
Table 2-2. Pin Assignment for Female (Terminal) Connector
DB9 Pin Function
1 Data Carrier Detect, Output (shorted to pins 4 and 6)
2 Receive Data, Output from board (receive refers to terminal side)
3 Transmit Data, Input to board (transmit refers to terminal side)
4 Data Terminal Ready, Input (shorted to pin 1 and 6)
5 Signal Ground
6 Data Set Ready, Output (shorted to pins 1 and 4)
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 2-5
Page 40

Initialization and Setup
Table 2-2. Pin Assignment for Female (Terminal) Connector
DB9 Pin Function
7 Request to Send, Input
8 Clear to send, Output
9 Not connected
Figure 2-5 on the next page shows the jumper locations for the board.
M523xEVB User’s Manual, Rev. 1.2
2-6 Freescale Semiconductor
Page 41

Installation and Setup
Figure 2-5. Jumper Locations
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 2-7
Page 42

Initialization and Setup
2.3 System Power-up and Initial Operation
When all of the cables are connected to the board, power may be applied. The dBUG ROM Monitor
initializes the board and then displays a power-up message on the terminal, which includes the amount of
memory present on the board.
Hard Reset
DRAM Size: 16M
Copyright 1995-2004 Motorola, Inc. All Rights Reserved.
ColdFire MCF523x EVS Firmware v2e.1a.xx (Build XXX on XXX XX 20XX
xx:xx:xx)
Enter 'help' for help.
dBUG>
The board is now ready for operation under the control of the debugger as described in Chapter 2. If you
do not get the above response, perform the following checks:
1. Make sure that the power supply is properly configured for polarity, voltage level and current
capability (~1A) and is connected to the board.
2. Check that the terminal and board are set for the same character format and baud.
3. Press the RESET button to insure that the board has been initialized properly.
If you still are not receiving the proper response, your board may have been damaged. Contact Freescale
Semiconductor for further instructions, please see the beginning of this manual for contact details.
2.4 Using The BDM Port
The MCF5235 microprocessor has a built in debug module referred to as BDM (background debug
module). In order to use BDM, simply connect the 26-pin debug connector on the board, J1, to the P&E
BDM wiggler cable provided in the kit. No special setting is needed. Refer to the ColdFire® Reference
Manual BDM Section for additional instructions.
NOTE
BDM functionality and use is supported via third party developer software
tools. Details may be found on the CD-ROM included in this kit.
M523xEVB User’s Manual, Rev. 1.2
2-8 Freescale Semiconductor
Page 43

Chapter 3 Using the Monitor/Debug Firmware
The M523xEVB single board computer has a resident firmware package that provides a self-contained
programming and operating environment. The firmware, named dBUG, provides the user with a
monitor/debug interface, inline assembler and disassembly, program download, register and memory
manipulation, and I/O control functions. This chapter is a how-to-use description of the dBUG package,
including the user interface and command structure.
3.1 What Is dBUG?
dBUG is a traditional ROM monitor/debugger that offers a comfortable and intuitive command line
interface that can be used to download and execute code. It contains all the primary features needed in a
debugger to create a useful debugging environment.
The firmware provides a self-contained programming and operating environment. dBUG interacts with the
user through pre-defined commands that are entered via the terminal. These commands are defined in
Section 3.4, “Commands”.
The user interface to dBUG is the command line. A number of features have been implemented to achieve
an easy and intuitive command line interface.
dBUG assumes that an 80x24 character dumb-terminal is utilized to connect to the debugger. For serial
communications, dBUG requires eight data bits, no parity, and one stop bit (8-N-1) with no flow control.
The default baud rate is 19200 but can be changed after power-up.
The command line prompt is “dBUG> ”. Any dBUG command may be entered from this prompt. dBUG
does not allow command lines to exceed 80 characters. Wherever possible, dBUG displays data in 80
columns or less. dBUG echoes each character as it is typed, eliminating the need for any “local echo” on
the terminal side.
In general, dBUG is not case sensitive. Commands may be entered either in upper or lower case, depending
upon the user’s equipment and preference. Only symbol names require that the exact case be used.
Most commands can be recognized by using an abbreviated name. For instance, entering “h” is the same
as entering “help”. Thus, it is not necessary to type the entire command name.
The commands DI, GO, MD, STEP and TRACE are used repeatedly when debugging. dBUG recognizes
this and allows for repeated execution of these commands with minimal typing. After a command is
entered, simply press <RETURN> or <ENTER> to invoke the command again. The command is executed
as if no command line parameters were provided.
An additional function called the "System Call" allows the user program to utilize various routines within
dBUG. The System Call is discussed at the end of this chapter.
The operational mode of dBUG is demonstrated in Figure 3-1. After the system initialization, the board
waits for a command-line input from the user terminal. When a proper command is entered, the operation
continues in one of the two basic modes. If the command causes execution of the user program, the dBUG
firmware may or may not be re-entered, at the discretion of the user’s program. For the alternate case, the
command will be executed under control of the dBUG firmware, and after command completion, the
system returns to command entry mode.
During command execution, additional user input may be required depending on the command function.
For commands that accept an optional <width> to modify the memory access size, the valid values are:
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-1
Page 44

Using the Monitor/Debug Firmware
• B 8-bit (byte) access
• W 16-bit (word) access
• L 32-bit (long) access
When no <width> option is provided, the default width is.W, 16-bit.
The core ColdFire® register set is maintained by dBUG. These are listed below:
•A0-A7
•D0-D7
•PC
•SR
All control registers on ColdFire® are not readable by the supervisor-programming model, and thus not
accessible via dBUG. User code may change these registers, but caution must be exercised as changes may
render dBUG inoperable.
A reference to “SP” (stack pointer) actually refers to general purpose address register seven, “A7.”
3.2 Operational Procedure
System power-up and initial operation are described in detail in Chapter 2. This information is repeated
here for convenience and to prevent possible damage.
3.2.1 System Power-up
• Be sure the power supply is connected properly prior to power-up.
• Make sure the terminal is connected to TERMINAL (P4) connector.
• Turn power on to the board.
Figure 3-1 shows the dBUG operational mode.
M523xEVB User’s Manual, Rev. 1.2
3-2 Freescale Semiconductor
Page 45

INITIALIZE
Operational Procedure
COMMAND LINE
INPUT FROM TERMINAL
EXECUTE
COMMAND
FUNCTION
YES
NO
DOES COMMAND LINE
CAUSE USER PROGRAM
EXECUTION
BEGIN EXECUTION
Figure 3-1. Flow Diagram of dBUG Operational Mode
NO
YES
JUMP TO USER
PROGRAM AND
3.2.2 System Initialization
After the EVB is powered-up and initialized, the terminal will display:
Hard Reset
DRAM Size: 16M
ColdFire MCF5235 on the M523xEVB
Firmware vXX.XX.XX (Build X on XXXX)
Copyright 1995-2004 Motorola, Inc. All Rights Reserved.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-3
Page 46

Using the Monitor/Debug Firmware
Enter 'help' for help.
dBUG>
Other means can be used to re-initialize the M523xEVB firmware. These means are discussed in the
following paragraphs.
3.2.2.1 External RESET Button
External RESET (SW6) is the red button. Depressing this button causes all processes to terminate, resets
the MCF5235 processor and board logic and restarts the dBUG firmware. Pressing the RESET button
would be the appropriate action if all else fails.
3.2.2.2 ABORT Button
ABORT (SW5) is the button located next to the RESET button. The abort function causes an interrupt of
the present processing (a level 7 interrupt on MCF5235) and gives control to the dBUG firmware. This
action differs from RESET in that no processor register or memory contents are changed, the processor
and peripherals are not reset, and dBUG is not restarted. Also, in response to depressing the ABORT
button, the contents of the MCF5235 core internal registers are displayed.
The abort function is most appropriate when software is being debugged. The user can interrupt the
processor without destroying the present state of the system. This is accomplished by forcing a
non-maskable interrupt that will call a dBUG routine that will save the current state of the registers to
shadow registers in the monitor for display to the user. The user will be returned to the ROM monitor
prompt after exception handling.
3.2.2.3 Software Reset Command
dBUG does have a command that causes the dBUG to restart as if a hardware reset was invoked. The
command is “RESET”.
3.3 Command Line Usage
The user interface to dBUG is the command line. A number of features have been implemented to achieve
an easy and intuitive command line interface.
dBUG assumes that an 80x24 ASCII character dumb terminal is used to connect to the debugger. For serial
communications, dBUG requires eight data bits, no parity, and one stop bit (8-N-1). The baud rate default
is 19200 bps — a speed commonly available from workstations, personal computers and dedicated
terminals.
The command line prompt is: dBUG>
Any dBUG command may be entered from this prompt. dBUG does not allow command lines to exceed
80 characters. Wherever possible, dBUG displays data in 80 columns or less. dBUG echoes each character
as it is typed, eliminating the need for any local echo on the terminal side.
The <Backspace> and <Delete> keys are recognized as rub-out keys for correcting typographical
mistakes.
M523xEVB User’s Manual, Rev. 1.2
3-4 Freescale Semiconductor
Page 47

Commands
Command lines may be recalled using the <Control> U, <Control> D and <Control> R key sequences.
<Control> U and <Control> D cycle up and down through previous command lines. <Control> R recalls
and executes the last command line.
In general, dBUG is not case-sensitive. Commands may be entered either in uppercase or lowercase,
depending upon the user’s equipment and preference. Only symbol names require that the exact case be
used.
Most commands can be recognized by using an abbreviated name. For instance, entering h is the same as
entering help. Thus it is not necessary to type the entire command name.
The commands DI, GO, MD, STEP and TRACE are used repeatedly when debugging. dBUG recognizes
this and allows for repeated execution of these commands with minimal typing. After a command is
entered, press the <Return> or <Enter> key to invoke the command again. The command is executed as if
no command line parameters were provided.
3.4 Commands
This section lists the commands that are available with all versions of dBUG. Some board or CPU
combinations may use additional commands not listed below.
Table 3-1. dBUG Command Summary
Mnemonic Syntax Description
ASM asm <<addr> stmt> Assemble
BC bc addr1 addr2 length Block Compare
BF bf <width> begin end data <inc> Block Fill
BM bm begin end dest Block Move
BR br addr <-r> <-c count> <-t trigger> Breakpoint
BS bs <width> begin end data Block Search
DC dc value Data Convert
DI di<addr> Disassemble
DL dl <offset> Download Serial
DLDBUG dldbug Download dBUG
DN dn <-c> <-e> <-i> <-s <-o offset>> <filename> Download Network
FL fl erase addr bytes
fl write dest src bytes
GO go <addr> Execute
GT gt addr Execute To
HELP help <command> Help
IRD ird <module.register> Internal Register Display
Flash Utilities
IRM irm module.register data Internal Register Modify
LR lr<width> addr Loop Read
LW lw<width> addr data Loop Write
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-5
Page 48

Using the Monitor/Debug Firmware
Mnemonic Syntax Description
ASM asm <<addr> stmt> Assemble
BC bc addr1 addr2 length Block Compare
BF bf <width> begin end data <inc> Block Fill
MD md<width> <begin> <end> Memory Display
MM mm<width> addr <data> Memory Modify
MMAP mmap Memory Map Display
RD rd <reg> Register Display
RM rm reg data Register Modify
RESET reset Reset
SD sd Stack Dump
SET set <option value> Set Configurations
SHOW show <option> Show Configurations
STEP step Step (Over)
Table 3-1. dBUG Command Summary (continued)
SYMBOL symbol <symb> <-a symb value> <-r symb> -C|l|s> Symbol Management
TRACE trace <num> Trace (Into)
UP up begin end filename Upload Memory to File
VERSION version Show Version
M523xEVB User’s Manual, Rev. 1.2
3-6 Freescale Semiconductor
Page 49

Commands
ASM Assembler
Usage: ASM <<addr> stmt>
The ASM command is a primitive assembler. The <stmt> is assembled and the resulting code placed at
<addr>. This command has an interactive and non-interactive mode of operation.
The value for address <addr> may be an absolute address specified as a hexadecimal value, or a symbol
name. The value for stmt must be valid assembler mnemonics for the CPU.
For the interactive mode, the user enters the command and the optional <addr>. If the address is not
specified, then the last address is used. The memory contents at the address are disassembled, and the user
prompted for the new assembly. If valid, the new assembly is placed into memory, and the address
incremented accordingly. If the assembly is not valid, then memory is not modified, and an error message
produced. In either case, memory is disassembled and the process repeats.
The user may press the <Enter> or <Return> key to accept the current memory contents and skip to the
next instruction, or a enter period to quit the interactive mode.
In the non-interactive mode, the user specifies the address and the assembly statement on the command
line. The statement is then assembled, and if valid, placed into memory, otherwise an error message is
produced.
Examples:
To place a NOP instruction at address 0x00010000, the command is:
asm 10000 nop
To interactively assemble memory at address 0x00400000, the command is:
asm 400000
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-7
Page 50

Using the Monitor/Debug Firmware
BC Block Compare
Usage:BC addr1 addr2 length
The BC command compares two contiguous blocks of memory on a byte by byte basis. The first block
starts at address addr1 and the second starts at address addr2, both of length bytes.
If the blocks are not identical, the address of the first mismatch is displayed. The value for addresses addr1
and addr2 may be an absolute address specified as a hexadecimal value or a symbol name. The value for
length may be a symbol name or a number converted according to the user defined radix (hexadecimal by
default).
Example:
To verify that the data starting at 0x20000 and ending at 0x30000 is identical to the data starting at
0x80000, the command is:
bc 20000 80000 10000
M523xEVB User’s Manual, Rev. 1.2
3-8 Freescale Semiconductor
Page 51

Commands
BF Block Fill
Usage:BF<width> begin end data <inc>
The BF command fills a contiguous block of memory starting at address begin, stopping at address end,
with the value data. <Width> modifies the size of the data that is written. If no <width> is specified, the
default of word sized data is used.
The value for addresses begin and end may be an absolute address specified as a hexadecimal value, or a
symbol name. The value for data may be a symbol name, or a number converted according to the
user-defined radix, normally hexadecimal.
The optional value <inc> can be used to increment (or decrement) the data value during the fill.
This command first aligns the starting address for the data access size, and then increments the address
accordingly during the operation. Thus, for the duration of the operation, this command performs
properly-aligned memory accesses.
Examples:
To fill a memory block starting at 0x00020000 and ending at 0x00040000 with the value 0x1234, the
command is:
bf 20000 40000 1234
To fill a block of memory starting at 0x00020000 and ending at 0x0004000 with a byte value of 0xAB, the
command is:
bf.b 20000 40000 AB
To zero out the BSS section of the target code (defined by the symbols bss_start and bss_end), the
command is:
bf bss_start bss_end 0
To fill a block of memory starting at 0x00020000 and ending at 0x00040000 with data that increments by
2 for each <width>, the command is:
bf 20000 40000 0 2
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-9
Page 52

Using the Monitor/Debug Firmware
BM Block Move
Usage:BM begin end dest
The BM command moves a contiguous block of memory starting at address begin and stopping at address
end to the new address dest. The BM command copies memory as a series of bytes, and does not alter the
original block.
The values for addresses begin, end, and dest may be absolute addresses specified as hexadecimal values,
or symbol names. If the destination address overlaps the block defined by begin and end, an error message
is produced and the command exits.
Examples:
To copy a block of memory starting at 0x00040000 and ending at 0x00080000 to the location 0x00200000,
the command is:
bm 40000 80000 200000
To copy the target code’s data section (defined by the symbols data_start and data_end) to 0x00200000,
the command is:
bm data_start data_end 200000
NOTE
Refer to “upuser” command for copying code/data into Flash memory.
M523xEVB User’s Manual, Rev. 1.2
3-10 Freescale Semiconductor
Page 53

Commands
BR Breakpoints
Usage:BR addr <-r> <-c count> <-t trigger>
The BR command inserts or removes breakpoints at address addr. The value for addr may be an absolute
address specified as a hexadecimal value, or a symbol name. Count and trigger are numbers converted
according to the user-defined radix, normally hexadecimal.
If no argument is provided to the BR command, a listing of all defined breakpoints is displayed.
The -r option to the BR command removes a breakpoint defined at address addr. If no address is specified
in conjunction with the -r option, then all breakpoints are removed.
Each time a breakpoint is encountered during the execution of target code, its count value is incremented
by one. By default, the initial count value for a breakpoint is zero, but the -c option allows setting the initial
count for the breakpoint.
Each time a breakpoint is encountered during the execution of target code, the count value is compared
against the trigger value. If the count value is equal to or greater than the trigger value, a breakpoint is
encountered and control returned to dBUG. By default, the initial trigger value for a breakpoint is one, but
the -t option allows setting the initial trigger for the breakpoint.
If no address is specified in conjunction with the -c or -t options, then all breakpoints are initialized to the
values specified by the -c or -t option.
Examples:
To set a breakpoint at the C function main() (symbol _main; see “symbol” command), the command is:
br _main
When the target code is executed and the processor reaches main(), control will be returned to dBUG.
To set a breakpoint at the C function bench() and set its trigger value to 3, the command is:
br _bench -t 3
When the target code is executed, the processor must attempt to execute the function bench() a third time
before returning control back to dBUG.
To remove all breakpoints, the command is:
br -r
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-11
Page 54

Using the Monitor/Debug Firmware
BS Block Search
Usage:BS<width> begin end data
The BS command searches a contiguous block of memory starting at address begin, stopping at address
end, for the value data. <Width> modifies the size of the data that is compared during the search. If no
<width> is specified, the default of word sized data is used.
The values for addresses begin and end may be absolute addresses specified as hexadecimal values, or
symbol names. The value for data may be a symbol name or a number converted according to the
user-defined radix, normally hexadecimal.
This command first aligns the starting address for the data access size, and then increments the address
accordingly during the operation. Thus, for the duration of the operation, this command performs
properly-aligned memory accesses.
Examples:
To search for the 16-bit value 0x1234 in the memory block starting at 0x00040000 and ending at
0x00080000:
bs 40000 80000 1234
This reads the 16-bit word located at 0x00040000 and compares it against the 16-bit value 0x1234. If no
match is found, then the address is incremented to 0x00040002 and the next 16-bit value is read and
compared.
To search for the 32-bit value 0xABCD in the memory block starting at 0x00040000 and ending at
0x00080000:
bs.l 40000 80000 ABCD
This reads the 32-bit word located at 0x00040000 and compares it against the 32-bit value 0x0000ABCD.
If no match is found, then the address is incremented to 0x00040004 and the next 32-bit value is read and
compared.
M523xEVB User’s Manual, Rev. 1.2
3-12 Freescale Semiconductor
Page 55

Commands
DC Data Conversion
Usage:DC data
The DC command displays the hexadecimal or decimal value data in hexadecimal, binary, and decimal
notation.
The value for data may be a symbol name or an absolute value. If an absolute value passed into the DC
command is prefixed by ‘0x’, then data is interpreted as a hexadecimal value. Otherwise data is interpreted
as a decimal value.
All values are treated as 32-bit quantities.
Examples:
To display the decimal and binary equivalent of 0x1234, the command is:
dc 0x1234
To display the hexadecimal and binary equivalent of 1234, the command is:
dc 1234
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-13
Page 56

Using the Monitor/Debug Firmware
DI Disassemble
Usage:DI <addr>
The DI command disassembles target code pointed to by addr. The value for addr may be an absolute
address specified as a hexadecimal value, or a symbol name.
Wherever possible, the disassembler will use information from the symbol table to produce a more
meaningful disassembly. This is especially useful for branch target addresses and subroutine calls.
The DI command attempts to track the address of the last disassembled opcode. If no address is provided
to the DI command, then the DI command uses the address of the last opcode that was disassembled.
The DI command is repeatable.
Examples:
To disassemble code that starts at 0x00040000, the command is:
di 40000
To disassemble code of the C function main(), the command is:
di _main
M523xEVB User’s Manual, Rev. 1.2
3-14 Freescale Semiconductor
Page 57

Commands
DL Download Console
Usage:DL <offset>
The DL command performs an S-record download of data obtained from the console, typically a serial
port. The value for offset is converted according to the user-defined radix, normally hexadecimal. Please
reference the ColdFire Microprocessor Family Programmer’s Reference Manual for details on the
S-Record format.
If offset is provided, then the destination address of each S-record is adjusted by offset.
The DL command checks the destination download address for validity. If the destination is an address
outside the defined user space, then an error message is displayed and downloading aborted.
If the S-record file contains the entry point address, then the program counter is set to reflect this address.
Examples:
To download an S-record file through the serial port, the command is:
dl
To download an S-record file through the serial port, and add an offset to the destination address of 0x40,
the command is:
dl 0x40
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-15
Page 58

Using the Monitor/Debug Firmware
DLDBUG Download dBUG
Usage:DL <offset>
The DLDBUG command is used to update the dBUG image in Flash. It erases the Flash sectors containing
the dBUG image, downloads a new dBUG image in S-record format obtained from the console, and
programs the new dBUG image into Flash.
When the DLDBUG command is issued, dBUG will prompt the user for verification before any actions
are taken. If the command is affirmed, the Flash is erased and the user is prompted to begin sending the
new dBUG S-record file. The file should be sent as a text file with no special transfer protocol.
Use this command with extreme caution, as any error can render dBUG useless!
M523xEVB User’s Manual, Rev. 1.2
3-16 Freescale Semiconductor
Page 59

Commands
DN Download Network
Usage:DN <-c> <-e> <-i> <-s> <-o offset> <filename>
The DN command downloads code from the network. The DN command handle files which are either
S-record, COFF, ELF or Image formats. The DN command uses Trivial File Transfer Protocol (TFTP) to
transfer files from a network host.
In general, the type of file to be downloaded and the name of the file must be specified to the DN
command. The -c option indicates a COFF download, the -e option indicates an ELF download, the -i
option indicates an Image download, and the -s indicates an S-record download. The -o option works only
in conjunction with the -s option to indicate an optional offset for S-record download. The filename is
passed directly to the TFTP server and therefore must be a valid filename on the server.
If neither of the -c, -e, -i, -s or filename options are specified, then a default filename and filetype will be
used. Default filename and filetype parameters are manipulated using the SET and SHOW commands.
The DN command checks the destination download address for validity. If the destination is an address
outside the defined user space, then an error message is displayed and downloading aborted.
For ELF and COFF files which contain symbolic debug information, the symbol tables are extracted from
the file during download and used by dBUG. Only global symbols are kept in dBUG. The dBUG symbol
table is not cleared prior to downloading, so it is the user’s responsibility to clear the symbol table as
necessary prior to downloading.
If an entry point address is specified in the S-record, COFF or ELF file, the program counter is set
accordingly.
Examples:
To download an S-record file with the name “srec.out”, the command is:
dn -s srec.out
To download a COFF file with the name “coff.out”, the command is:
dn -c coff.out
To download a file using the default filetype with the name “bench.out”, the command is:
dn bench.out
To download a file using the default filename and filetype, the command is:
dn
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-17
Page 60

Using the Monitor/Debug Firmware
FL Flash Utilities
Info Usage: FL
Erase Usage: FL erase addr bytes
Write Usage: FL write dest src bytes
The FL command provides a set of flash utilities that will display information about the Flash devices on
the EVB, erase a specified range of Flash, or erase and program a specified range of Flash.
When issued with no parameters, the FL command will display usage information as well as device
specific information for the Flash devices available. This information includes size, address range,
protected range, access size, and sector boundaries.
When the erase command is given, the FL command will attempt to erase the number of bytes specified
on the command line beginning at addr. If this range doesn’t start and end on Flash sector boundaries, the
range will be adjusted automatically and the user will be prompted for verification before proceeding.
When the write command is given, the FL command will program the number of bytes specified from src
to dest. An erase of this region will first be attempted. As with the erase command, if the Flash range to be
programmed doesn’t start and end on Flash sector boundaries, the range will be adjusted and the user will
be prompted for verification before the erase is performed. The specified range is also checked to insure
that the entire destination range is valid within the same Flash device and that the src and dest are not
within the same device.
M523xEVB User’s Manual, Rev. 1.2
3-18 Freescale Semiconductor
Page 61

Commands
GO Execute
Usage:GO <addr>
The GO command executes target code starting at address addr. The value for addr may be an absolute
address specified as a hexadecimal value, or a symbol name.
If no argument is provided, the GO command begins executing instructions at the current program counter.
When the GO command is executed, all user-defined breakpoints are inserted into the target code, and the
context is switched to the target program. Control is only regained when the target code encounters a
breakpoint, illegal instruction, trap #15 exception, or other exception which causes control to be handed
back to dBUG.
The GO command is repeatable.
Examples:
To execute code at the current program counter, the command is:
go
To execute code at the C function main(), the command is:
go _main
To execute code at the address 0x00040000, the command is:
go 40000
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-19
Page 62

Using the Monitor/Debug Firmware
GT Execute To
Usage:GT addr
The GT command inserts a temporary breakpoint at addr and then executes target code starting at the
current program counter. The value for addr may be an absolute address specified as a hexadecimal value,
or a symbol name.
When the GT command is executed, all breakpoints are inserted into the target code, and the context is
switched to the target program. Control is only regained when the target code encounters a breakpoint,
illegal instruction, or other exception which causes control to be handed back to dBUG.
Examples:
To execute code up to the C function bench(), the command is:
gt _bench
M523xEVB User’s Manual, Rev. 1.2
3-20 Freescale Semiconductor
Page 63

Commands
IRD Internal Register Display
Usage:IRD <module.register>
This command displays the internal registers of different modules inside the MCF5235. In the command
line, module refers to the module name where the register is located and register refers to the specific
register to display.
The registers are organized according to the module to which they belong. Use the IRD command without
any parameters to get a list of all the valid modules. Refer to the MCF5235 user’s manual for more
information on these modules and the registers they contain.
Example:
ird sim.rsr
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-21
Page 64

Using the Monitor/Debug Firmware
IRM Internal Register Modify
Usage:IRM module.register data
This command modifies the contents of the internal registers of different modules inside the MCF5235. In
the command line, module refers to the module name where the register is located and register refers to
the specific register to modify. The data parameter specifies the new value to be written into the register.
.
Example:
To modify the TMR register of the first Timer module to the value 0x0021, the command is:
irm timer1.tmr 0021
M523xEVB User’s Manual, Rev. 1.2
3-22 Freescale Semiconductor
Page 65

Commands
HELP Help
Usage:HELP <command>
The HELP command displays a brief syntax of the commands available within dBUG. In addition, the
address of where user code may start is given. If command is provided, then a brief listing of the syntax of
the specified command is displayed.
Examples:
To obtain a listing of all the commands available within dBUG, the command is:
help
To obtain help on the breakpoint command, the command is:
help br
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-23
Page 66

Using the Monitor/Debug Firmware
LR Loop Read
Usage:LR<width> addr
The LR command continually reads the data at addr until a key is pressed. The optional <width> specifies
the size of the data to be read. If no <width> is specified, the command defaults to reading word sized data.
Example:
To continually read the longword data from address 0x20000, the command is:
lr.l 20000
M523xEVB User’s Manual, Rev. 1.2
3-24 Freescale Semiconductor
Page 67

Commands
LW Loop Write
Usage:LW<width> addr data
The LW command continually writes data to addr. The optional width specifies the size of the access to
memory. The default access size is a word.
Examples:
To continually write the longword data 0x12345678 to address 0x20000, the command is:
lw.l 20000 12345678
Note that the following command writes 0x78 into memory:
lw.b 20000 12345678
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-25
Page 68

Using the Monitor/Debug Firmware
MD Memory Display
Usage:MD<width> <begin> <end>
The MD command displays a contiguous block of memory starting at address begin and stopping at
address end. The values for addresses begin and end may be absolute addresses specified as hexadecimal
values, or symbol names. Width modifies the size of the data that is displayed. If no <width> is specified,
the default of word sized data is used.
Memory display starts at the address begin. If no beginning address is provided, the MD command uses
the last address that was displayed. If no ending address is provided, then MD will display memory up to
an address that is 128 beyond the starting address.
This command first aligns the starting address for the data access size, and then increments the address
accordingly during the operation. Thus, for the duration of the operation, this command performs
properly-aligned memory accesses.
Examples:
To display memory at address 0x00400000, the command is:
md 400000
To display memory in the data section (defined by the symbols data_start and data_end), the command is:
md data_start
To display a range of bytes from 0x00040000 to 0x00050000, the command is:
md.b 40000 50000
To display a range of 32-bit values starting at 0x00040000 and ending at 0x00050000:
md.l 40000 50000
M523xEVB User’s Manual, Rev. 1.2
3-26 Freescale Semiconductor
Page 69

Commands
MM Memory Modify
Usage:MM<width> addr <data>
The MM command modifies memory at the address addr. The value for addr may be an absolute address
specified as a hexadecimal value, or a symbol name. Width specifies the size of the data that is modified.
If no <width> is specified, the default of word sized data is used. The value for data may be a symbol name,
or a number converted according to the user-defined radix, normally hexadecimal.
If a value for data is provided, then the MM command immediately sets the contents of addr to data. If no
value for data is provided, then the MM command enters into a loop. The loop obtains a value for data,
sets the contents of the current address to data, increments the address according to the data size, and
repeats. The loop terminates when an invalid entry for the data value is entered, i.e., a period.
This command first aligns the starting address for the data access size, and then increments the address
accordingly during the operation. Thus, for the duration of the operation, this command performs
properly-aligned memory accesses.
Examples:
To set the byte at location 0x00010000 to be 0xFF, the command is:
mm.b 10000 FF
To interactively modify memory beginning at 0x00010000, the command is:
mm 10000
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-27
Page 70

Using the Monitor/Debug Firmware
MMAP Memory Map Display
Usage:mmap
This command displays the memory map information for the M523xEVB evaluation board. The
information displayed includes the type of memory, the start and end address of the memory, and the port
size of the memory. The display also includes information on how the Chip-selects are used on the board
and which regions of memory are reserved for dBUG use (protected).
Here is an example of the output from this command:
Type Start End Port Size
---------------------------------------------------
SDRAM 0x00000000 0x00FFFFFF 32-bit
SRAM (Int) 0x20000000 0x2000FFFF 32-bit
ASRAM (Ext) 0x30000000 0x3007FFFF 32-bit
IPSBAR 0x40000000 0x7FFFFFFF 32-bit
Flash (Ext) 0xFFE00000 0xFFFFFFFF 16-bit
Protected Start End
----------------------------------------
dBUG Code 0xFFE00000 0xFFE3FFFF
dBUG Data 0x00000000 0x0000FFFF
Chip Selects
----------------
CS0 Ext Flash
CS1 Ext ASRAM
M523xEVB User’s Manual, Rev. 1.2
3-28 Freescale Semiconductor
Page 71

Commands
RD Register Display
Usage:RD <reg>
The RD command displays the register set of the target. If no argument for reg is provided, then all
registers are displayed. Otherwise, the value for reg is displayed.
dBUG preserves the registers by storing a copy of the register set in a buffer. The RD command displays
register values from the register buffer.
Examples:
To display all the registers and their values, the command is:
rd
To display only the program counter:
rd pc
Here is an example of the output from this command:
PC: 00000000 SR: 2000 [t.Sm.000...xnzvc]
An: 00000000 00000000 00000000 00000000 00000000 00000000 00000000 01000000
Dn: 00000000 00000000 00000000 00000000 00000000 00000000 00000000 00000000
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-29
Page 72

Using the Monitor/Debug Firmware
RM Register Modify
Usage:RM reg data
The RM command modifies the contents of the register reg to data. The value for reg is the name of the
register, and the value for data may be a symbol name, or it is converted according to the user-defined
radix, normally hexadecimal.
dBUG preserves the registers by storing a copy of the register set in a buffer. The RM command updates
the copy of the register in the buffer. The actual value will not be written to the register until target code is
executed.
Examples:
To change register D0 to contain the value 0x1234, the command is:
rm D0 1234
M523xEVB User’s Manual, Rev. 1.2
3-30 Freescale Semiconductor
Page 73

Commands
RESET Reset the Board and dBUG
Usage:RESET
The RESET command resets the board and dBUG to their initial power-on states.
The RESET command executes the same sequence of code that occurs at power-on. If the RESET
command fails to reset the board adequately, cycle the power or press the reset button.
Examples:
To reset the board and clear the dBUG data structures, the command is:
reset
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-31
Page 74

Using the Monitor/Debug Firmware
SD Stack Dump
Usage:SD
The SD command displays a back trace of stack frames. This command is useful after some user code has
executed that creates stack frames (i.e. nested function calls). After control is returned to dBUG, the SD
command will decode the stack frames and display a trace of the function calls.
M523xEVB User’s Manual, Rev. 1.2
3-32 Freescale Semiconductor
Page 75

Commands
SET Set Configurations
Usage: SET <option value>
The SET command allows the setting of user-configurable options within dBUG. With no arguments, SET
displays the options and values available. The SHOW command displays the settings in the appropriate
format. The standard set of options is listed below.
baud - This is the baud rate for the first serial port on the board. All communications between dBUG and
the user occur using either 9600 or 19200 bps, eight data bits, no parity, and one stop bit, 8-N-1, with no
flow control.
base - This is the default radix for use in converting a number from its ASCII text representation to the
internal quantity used by dBUG. The default is hexadecimal (base 16), and other choices are binary (base
2), octal (base 8), and decimal (base 10).
client - This is the network Internet Protocol (IP) address of the board. For network communications, the
client IP is required to be set to a unique value, usually assigned by your local network administrator.
server - This is the network IP address of the machine which contains files accessible via TFTP. Your local
network administrator will have this information and can assist in properly configuring a TFTP server if
one does not exist.
gateway - This is the network IP address of the gateway for your local subnetwork. If the client IP address
and server IP address are not on the same subnetwork, then this option must be properly set. Your local
network administrator will have this information.
netmask - This is the network address mask to determine if use of a gateway is required. This field must
be properly set. Your local network administrator will have this information.
filename - This is the default filename to be used for network download if no name is provided to the DN
command.
filetype - This is the default filetype to be used for network download if no type is provided to the DN
command. Valid values are: “srecord”, “coff”, and “elf”.
mac - This is the ethernet Media Access Control (MAC) address (a.k.a hardware address) for the
evaluation board. This should be set to a unique value, and the most significant nibble should always be
even.
Examples: To set the baud rate of the board to be 19200, the command is:
set baud 19200
NOTE
See the SHOW command for a display containing the correct formatting of
these options.
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-33
Page 76

Using the Monitor/Debug Firmware
SHOW Show Configurations
Usage: SHOW <option>
The SHOW command displays the settings of the user-configurable options within dBUG. When no option
is provided, SHOW displays all options and values.
Examples:
To display all options and settings, the command is:
show
To display the current baud rate of the board, the command is:
show baud
Here is an example of the output from a show command:
dBUG> show
base: 16
baud: 19200
server: 0.0.0.0
client: 0.0.0.0
gateway: 0.0.0.0
netmask: 255.255.255.0
filename: test.s19
filetype: S-Record
ethaddr: 00:CF:52:82:CF:01
M523xEVB User’s Manual, Rev. 1.2
3-34 Freescale Semiconductor
Page 77

Commands
STEP Step Over
Usage:STEP
The STEP command can be used to “step over” a subroutine call, rather than tracing every instruction in
the subroutine. The ST command sets a temporary breakpoint one instruction beyond the current program
counter and then executes the target code.
The STEP command can be used to “step over” BSR and JSR instructions.
The STEP command will work for other instructions as well, but note that if the STEP command is used
with an instruction that will not return, i.e. BRA, then the temporary breakpoint may never be encountered
and dBUG may never regain control.
Examples:
To pass over a subroutine call, the command is:
step
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-35
Page 78

Using the Monitor/Debug Firmware
SYMBOL Symbol Name Management
Usage:SYMBOL <symb> <-a symb value> <-r symb> <-c|l|s>
The SYMBOL command adds or removes symbol names from the symbol table. If only a symbol name is
provided to the SYMBOL command, then the symbol table is searched for a match on the symbol name
and its information displayed.
The -a option adds a symbol name and its value into the symbol table. The -r option removes a symbol
name from the table.
The -c option clears the entire symbol table, the -l option lists the contents of the symbol table, and the -s
option displays usage information for the symbol table.
Symbol names contained in the symbol table are truncated to 31 characters. Any symbol table lookups,
either by the SYMBOL command or by the disassembler, will only use the first 31 characters. Symbol
names are case-sensitive.
Symbols can also be added to the symbol table via in-line assembly labels and ethernet downloads of ELF
formatted files.
Examples:
To define the symbol “main” to have the value 0x00040000, the command is:
symbol -a main 40000
To remove the symbol “junk” from the table, the command is:
symbol -r junk
To see how full the symbol table is, the command is:
symbol -s
To display the symbol table, the command is:
symbol -l
M523xEVB User’s Manual, Rev. 1.2
3-36 Freescale Semiconductor
Page 79
Commands
TRACE Trace Into
Usage:TRACE <num>
The TRACE command allows single-instruction execution. If num is provided, then num instructions are
executed before control is handed back to dBUG. The value for num is a decimal number.
The TRACE command sets bits in the processors’ supervisor registers to achieve single-instruction
execution, and the target code executed. Control returns to dBUG after a single-instruction execution of
the target code.
This command is repeatable.
Examples:
To trace one instruction at the program counter, the command is:
tr
To trace 20 instructions from the program counter, the command is:
tr 20
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-37
Page 80

Using the Monitor/Debug Firmware
UP Upload Data
Usage:UP begin end filename
The UP command uploads the data from a memory region (specified by begin and end) to a file (specified
by filename) over the network. The file created contains the raw binary data from the specified memory
region. The UP command uses the Trivial File Transfer Protocol (TFTP) to transfer files to a network host.
Example:
To upload a portion of SDRAM to a file “sdram.bin”, the command is:
up 40000 50000 sdram.bin
M523xEVB User’s Manual, Rev. 1.2
3-38 Freescale Semiconductor
Page 81

TRAP #15 Functions
VERSION Display dBUG Version
Usage:VERSION
The VERSION command displays the version information for dBUG. The dBUG version, build number
and build date are all given.
The version number is separated by a decimal, for example, “v 2b.1c.1a”.
In this example, v 2b . 1c . 1a
dBUG common
major and minor
revision
CPU major
and minor
revision
{
{
{
board major
and minor
revision
The version date is the day and time at which the entire dBUG monitor was compiled and built.
Examples:
To display the version of the dBUG monitor, the command is:
version
3.5 TRAP #15 Functions
An additional utility within the dBUG firmware is a function called the TRAP 15 handler. This function
can be called by the user program to utilize various routines within the dBUG, to perform a special task,
and to return control to the dBUG. This section describes the TRAP 15 handler and how it is used.
There are four TRAP #15 functions. These are: OUT_CHAR, IN_CHAR, CHAR_PRESENT, and
EXIT_TO_dBUG.
3.5.1 OUT_CHAR
This function ( function code 0x0013) sends a character, which is in the lower 8 bits of D1, to the terminal.
Assembly example:
/* assume d1 contains the character */
move.l #$0013,d0 Selects the function
TRAP #15 The character in d1 is sent to terminal
C example:
void board_out_char (int ch)
{
/* If your C compiler produces a LINK/UNLK pair for this routine,
* then use the following code which takes this into account
*/
#if l
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-39
Page 82

Using the Monitor/Debug Firmware
/* LINK a6,#0 -- produced by C compiler */
asm (“ move.l8(a6),d1”); /* put ‘ch’into d1 */
asm (“ move.l#0x0013,d0”); /* select the function */
asm (“ trap#15”); /* make the call */
/* UNLK a6 -- produced by C compiler */
#else
/* If C compiler does not produce a LINK/UNLK pair, the use
* the following code.
*/
asm (“ move.l4(sp),d1”); /* put ‘ch’into d1 */
asm (“ move.l#0x0013,d0”); /* select the function */
asm (“ trap#15”); /* make the call */
#endif
}
3.5.2 IN_CHAR
This function (function code 0x0010) returns an input character (from terminal) to the caller. The returned
character is in D1.
Assembly example:
move.l #$0010,d0 Select the function
trap #15 Make the call, the input character is in d1.
C example:
int board_in_char (void)
{
asm (“ move.l#0x0010,d0”); /* select the function */
asm (“ trap#15”); /* make the call */
asm (“ move.ld1,d0”); /* put the character in d0 */
}
3.5.3 CHAR_PRESENT
This function (function code 0x0014) checks if an input character is present to receive. A value of zero is
returned in D0 when no character is present. A non-zero value in D0 means a character is present.
Assembly example:
move.l #$0014,d0 Select the function
trap #15 Make the call, d0 contains the response (yes/no).
M523xEVB User’s Manual, Rev. 1.2
3-40 Freescale Semiconductor
Page 83

TRAP #15 Functions
C example:
int board_char_present (void)
{
asm (“ move.l#0x0014,d0”); /* select the function */
asm (“ trap#15”); /* make the call */
}
3.5.4 EXIT_TO_dBUG
This function (function code 0x0000) transfers the control back to the dBUG, by terminating the user code.
The register context are preserved.
Assembly example:
move.l #$0000,d0 Select the function
trap #15 Make the call, exit to dBUG.
C example:
void board_exit_to_dbug (void)
{
asm (“ move.l#0x0000,d0”); /* select the function */
asm (“ trap#15”); /* exit and transfer to dBUG */
}
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor 3-41
Page 84

Using the Monitor/Debug Firmware
M523xEVB User’s Manual, Rev. 1.2
3-42 Freescale Semiconductor
Page 85

Appendix A Configuring dBUG for Network Downloads
The dBUG module has the ability to perform downloads over an Ethernet network using the Trivial File
Transfer Protocol, TFTP (NOTE: this requires a TFTP server to be running on the host attached to the
board). Prior to using this feature, several parameters are required for network downloads to occur. The
information that is required and the steps for configuring dBUG are described below.
A.1 Required Network Parameters
For performing network downloads, dBUG needs 6 parameters; 4 are network-related, and 2 are
download-related. The parameters are listed below, with the dBUG designation following in parenthesis.
All computers connected to an Ethernet network running the IP protocol need 3 network-specific
parameters. These parameters are:
• Internet Protocol, IP, address for the computer (client IP),
• IP address of the Gateway for non-local traffic (gateway IP), and
• Network netmask for flagging traffic as local or non-local (netmask).
In addition, the dBUG network download command requires the following three parameters:
• IP address of the TFTP server (server IP),
• Name of the file to download (filename),
• Type of the file to download (filetype of S-record, COFF, ELF, or Image).
Your local system administrator can assign a unique IP address for the board, and also provide you the IP
addresses of the gateway, netmask, and TFTP server. Fill out the lines below with this information.
Client IP:___.___.___.___(IP address of the board)
Server IP:___.___.___.___(IP address of the TFTP server)
Gateway:___.___.___.___(IP address of the gateway)
Netmask:___.___.___.___(Network netmask)
A.2 Configuring dBUG Network Parameters
Once the network parameters have been obtained, the dBUG Rom Monitor must be configured. The
following commands are used to configure the network parameters.
set client <client IP>
set server <server IP>
set gateway <gateway IP>
set netmask <netmask>
set mac <addr>
For example, the TFTP server is named ‘santafe’ and has IP address 123.45.67.1. The board is assigned
the IP address of 123.45.68.15. The gateway IP address is 123.45.68.250, and the netmask is
255.255.255.0. The MAC address is chosen arbitrarily and is unique. The commands to dBUG are:
set client 123.45.68.15
set server 123.45.67.1
set gateway 123.45.68.250
set netmask 255.255.255.0
set mac 00:CF:52:82:EB:01
M523xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor A-1
Page 86

Configuring dBUG for Network Downloads
The last step is to inform dBUG of the name and type of the file to download. Prior to giving the name of
the file, keep in mind the following.
Most, if not all, TFTP servers will only permit access to files starting at a particular sub-directory. (This
is a security feature which prevents reading of arbitrary files by unknown persons.) For example, SunOS
uses the directory /tftp_boot as the default TFTP directory. When specifying a filename to a SunOS TFTP
server, all filenames are relative to /tftp_boot. As a result, you normally will be required to copy the file
to download into the directory used by the TFTP server.
A default filename for network downloads is maintained by dBUG. To change the default filename, use
the command:
set filename <filename>
When using the Ethernet network for download, either S-record, COFF, ELF, or Image files may be
downloaded. A default filetype for network downloads is maintained by dBUG as well. To change the
default filetype, use the command:
set filetype <srecord|coff|elf|image>
Continuing with the above example, the compiler produces an executable COFF file, ‘a.out’. This file is
copied to the /tftp_boot directory on the server with the command:
rcp a.out santafe:/tftp_boot/a.out
Change the default filename and filetype with the commands:
set filename a.out
set filetype coff
Finally, perform the network download with the ‘dn’ command. The network download process uses the
configured IP addresses and the default filename and filetype for initiating a TFTP download from the
TFTP server.
A.3 Troubleshooting Network Problems
Most problems related to network downloads are a direct result of improper configuration. Verify that all
IP addresses configured into dBUG are correct. This is accomplished via the ‘show ’command.
Using an IP address already assigned to another machine will cause dBUG network download to fail, and
probably other severe network problems. Make certain the client IP address is unique for the board.
Check for proper insertion or connection of the network cable. Is the status LED lit indicating that network
traffic is present?
Check for proper configuration and operation of the TFTP server. Most Unix workstations can execute a
command named ‘tftp’ which can be used to connect to the TFTP server as well. Is the default TFTP root
directory present and readable?
If ‘ICMP_DESTINATION_UNREACHABLE’ or similar ICMP message appears, then a serious error has
occurred. Reset the board, and wait one minute for the TFTP server to time out and terminate any open
connections. Verify that the IP addresses for the server and gateway are correct. Also verify that a TFTP
server is running on the server.
M523xEVB User’s Manual, Rev. 1.2
A-2 Freescale Semiconductor
Page 87

Appendix B Schematics
M532xEVB User’s Manual, Rev. 1.2
Freescale Semiconductor B-1
Page 88

5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
SHEET 12
SHEET 11
SHEET 9
HIERARCHICAL INTERCONNECTS
ASRAM MEMORY
ETHERNET INTERFACE
POWER SUPPLY UNIT
EXPANSION CONNECTORS
SHEET 8
M523X CPU
- All connectors are denoted Jx
Table Of Contents:
SERIAL I/O INTERFACE
SHEET 6
- All decoupling caps less than 0.1uF are COG SMD 0805 unless otherwise stated
Date
SHEET 13
FLASH MEMORY
Rev
SHEET 14
ETPU INTERFACE
Revision Information
SHEET 7
SHEET 5
SHEET 15
Designer
SHEET 2
CAN INTERFACE
Notes:
- All test points are denoted TPx
0.0SHEET 4 02 Feb 04
RESET CONFIGURATION AND CLOCKING CIRCUITRY
SHEET 10
ADDRESS AND DATA BUS BUFFERS
- All decoupling caps greater than 0.1uF are X7R SMD 0805 unless otherwise stated
L. Anderson Provisional release
M523X Evaluation Board
- All Switches are denoted SWx
- All jumpers are denoted JPx
CommentsSHEET 3
DEBUG
SDRAM MEMORY
SHEET 16
USB INTERFACE
Motorola SPS TSPG - TECD ColdFire Group
A 05 Mar 04 P. Highton Added Metrowerks schematic part number and revision letter.
B 30 Apr 04 L. Anderson Removed alternative footprint for 90-pin SSOP 32-bit Flash and
replaced with 16-bit Flash, corrected RJ45 pinout and added
18Kohm pull-down resistors to U11 (ethernet transceiver).
C 23 Jun 04 L. Anderson &
Pete Highton
Final update including silkscreen modifications of the reset
configuration tables. Correction of signals on the RJ-45 connector
and addition of pull-down resistors on the ethernet signals.
D 27 Jul 05 L. Anderson Updated USB page. Jumpers 59 to 62 renumbered.
SCH-20380 General Notes and Information
D
M523xEVB
B
116Tuesday, July 26, 2005
Title
Size Document Number Rev
Date: Sheet
of
Page 89

of
216Tuesday, July 26, 2005
1
2
3
4
Sheet 3ASRAM
Sheet 5CAN
Sheet 7Debug
Sheet 8Ethernet
Sheet 4Buffers
Sheet 9eTPU
Sheet 11Flash Memory
B_A[23:0]
/BS[3:0]
B_D[31:0]
/CS[7:0]
/OE
R/W
CANH1
CANL1
CAN0RX
CAN0TX
CAN1RX
CAN1TX
BDM_/RSTIN
TMS/BKPT
DDATA[3:0]
PST[3:0]
/TA
TCLK/PSTCLK
TDI/DSI
TDO/DSO
TRST/DSCLK
EMDC
EMDIO
ECOL
ECRS
ERXDV
ERXER
ERXCLK
ERXD0
ERXD1
ERXD2
ERXD3
ETXEN
ETXER
ETXCLK
ETXD0
ETXD1
ETXD2
ETXD3
ETH_CLK
/IRQ[7:1]
/RSTOUT
B_A[23:0]
B_D[31:0]
R/W
/CS[7:0]
D[31:0]
A[23:0]
TCRCLK
UTPUODIS
LTPUODIS
TPUCH[15:0]
TPUCH[31:16]
QSPI_PCS0
QSPI_DOUT
QSPI_DIN
QSPI_SCK
TSIZ1
TSIZ0
/TEA
/TIP
R/W
/CS[7:0]
B_D[31:0]
B_A[23:0]
/OE
CPU
B_A[23:0]
A[23:0]
A[23:0]
B_D[31:0]
/BS[3:0]
/BS[3:0]
/CS[7:0]
/OE
/CS[7:0]
/OE
D[31:0]
D[31:0]
R/W
/IRQ[7:1]
R/W
/IRQ[7:1]
M523xEVB
Title
1
SCH-20380 Hierarchical Block Diagram D
C
Size Document Number Rev
Date: Sheet
Sheet 15Serial I/O
2
Sheet 13Reset Config & Clocks
3
Sheet 14SDRAM
4
Sheet16USB
TSIZ0
TSIZ1
/TS
/TIP
/TA
/TEA
LTPUODIS
UTPUODIS
TPUCH[15:0]
TPUCH[31:16]
/TEA
/TA
TSIZ1
/TIP
/TS
TSIZ0
TPUCH[15:0]
TPUCH[31:16]
UTPUODIS
LTPUODIS
TCRCLK
TCRCLK
EMDC
EMDC
EMDIO
EMDIO
ECOL
ECOL
ECRS
ECRS
ERXDV
ERXDV
ERXER
ERXER
ERXCLK
ERXCLK
ERXD0
ERXD0
ERXD1
ERXD1
ERXD2
ERXD2
ERXD3
ERXD3
ETXEN
ETXER
ETXCLK
ETXD0
ETXER
ETXCLK
ETXEN
TCLK/PSTCLK
PST[3:0]
DDATA[3:0]
ETXD2
ETXD1
ETXD3
ETXD0
PST[3:0]
ETXD1
ETXD3
ETXD2
DDATA[3:0]
TMS/BKPT
TDI/DSI
TDI/DSI
TCLK/PSTCLK
TMS/BKPT
TDO/DSO
TRST/DSCLK
TDO/DSO
TRST/DSCLK
DTIN0
DTIN0
DTOUT0
DTOUT0
DTIN1
DTIN1
DTOUT1
DTOUT1
DTIN2
DTOUT2
DTIN2
DTOUT2
DTIN3
DTOUT3
DTIN3
DTOUT3
CLKMOD[1:0]
JTAG_EN
/RCON
/RCON
JTAG_EN
CLKMOD[1:0]
CAN1RX
CAN1RX
CAN1TX
CAN1TX
CAN0RX
CAN0RX
CAN0TX
CAN0TX
/SD_WE
/SD_SCKE
/SD_WE
/SD_CS1
/SD_CS0
SD_SCKE
/SD_CS1
/SD_CS0
/SD_RAS
/SD_CAS
/SD_CAS
/SD_RAS
/U2RTS
/U2RTS
/U2CTS
U2TXD
/U2CTS
U2TXD
U2RXD
U2RXD
/U1RTS
/U1RTS
/U1CTS
/U1CTS
U1TXD
U1TXD
U1RXD
U1RXD
/U0RTS
/U0CTS
/U0RTS
/U0CTS
U0TXD
U0TXD
U0RXD
U0RXD
CLKOUT
EXTAL
CLKOUT
XTAL
EXTAL
XTAL
/RESET
/RESET
/RSTOUT
/RSTOUT
QSPI_SCK
QSPI_DOUT
QSPI_DIN
QSPI_SCK
QSPI_DOUT
QSPI_DIN
QSPI_PCS1
QSPI_PCS0
QSPI_PCS0
QSPI_PCS1
I2C_SDA
I2C_SCL
I2C_SCL
I2C_SDA
ETPU/ETH
ETPU/ETH
Sheet 6
Motorola SPS TSPG - TECD ColdFire Group
U0RXD
U0TXD
/U0CTS
/U0RTS
U1RXD
U1TXD
/U1CTS
/U1RTS
U2RXD
U2TXD
/U2CTS
/U2RTS
/IRQ[7:1]
/RSTOUT
QSPI_PCS1
QSPI_PCS0
QSPI_DOUT
QSPI_DIN
QSPI_SCK
CANH1
CANL1
I2C_SCL
I2C_SDA
ETPU/ETH
DTOUT3
DTIN3
DTOUT2
DTIN2
DTOUT1
DTIN1
DTOUT0
DTIN0
JTAG_EN
/RCON
CLKMOD[1:0]
/RSTOUT
XTAL
EXTAL
CLKOUT
TRST/DSCLK
TDO/DSO
TDI/DSI
TMS/BKPT
/RESET
/BDM_RSTIN
ETH_CLK
/IRQ[7:1]
D[31:0]
TSIZ1
/CS[7:0]
TSIZ0
/BS[3:0]
/TEA
/TA
/TIP
/TS
R/W
/OE
UTPUODIS
LTPUODIS
/EXT_RSTIN
A[23:0]
/BS[3:0]
D[31:0]
/SD_CAS
/SD_RAS
/SD_CS0
CLKOUT
SD_SCKE
/SD_WE
/CS[7:0]
/IRQ[7:1]
B_A[23:0]
B_D[31:0]
/OE
R/W
/RSTOUT
DTIN1
DTOUT1
DTIN2
DTOUT2
/TS
5
Sheet 12PSU
A[23:0]
/BS[3:0]
Expansion Connectors
D D
/OE
/CS[7:0]
D[31:0]
R/W
/IRQ[7:1]
/TA
/TIP
/TEA
TSIZ0
TSIZ1
LTPUODIS
UTPUODIS
TPUCH[15:0]
TPUCH[31:16]
TCRCLK
EMDC
EMDIO
PST[3:0]
TMS/BKPT
DDATA[3:0]
TDI/DSI
TDO/DSO
TRST/DSCLK
TCLK/PSTCLK
DTIN0
DTIN1
DTOUT0
DTIN2
DTOUT1
DTIN3
DTOUT2
DTOUT3
/RCON
JTAG_EN
CLKMOD[1:0]
CAN1TX
CAN1RX
CAN0TX
CAN0RX
/SD_WE
SD_SCKE
/SD_CS1
/SD_CS0
/SD_CAS
/SD_RAS
/U2CTS
/U2RTS
U2TXD
U2RXD
/U1RTS
/U1CTS
U1TXD
U1RXD
/U0CTS
/U0RTS
U0TXD
U0RXD
EXTAL
CLKOUT
XTAL
/RESET
/RSTOUT
/EXT_RSTIN
QSPI_DIN
QSPI_SCK
QSPI_DOUT
QSPI_PCS1
QSPI_PCS0
I2C_SDA
I2C_SCL
5
Sheet 10
C C
B B
A A
Page 90

5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
ASRAM Upper 16-bit word
NOTE: /BS3 selects the most
significant byte lane access and
/BS0 the least significant.
ASRAM Lower 16-bit word
TSOP II
Do not populate
TSOP II
Do not populate
Each ASRAM is 256K x 16bit (512KB)
Total ASRAM available = 1MB
NOTE: Alternative ASRAM's with the same PCB footprint
and functionality are :- Renesas HM62W16255HCJP-12
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 Asynchronous SRAM
D
M523xEVB
B
316Tuesday, July 26, 2005
Title
Size Document Number Rev
Date: Sheet
of
B_A[23:0]
/BS2
B_D20
B_A[23:0]
/BS0/CS1
B_A[23:0]
/BS1
/BS3
/BS[3:0]
/CS1
B_D10
B_D18
B_D11
B_D24
B_D16
B_D13
B_D5
B_D0
B_D8
B_D19
B_D25
B_D17
B_D7
B_D12
B_D1
B_D28
B_D31
B_D23
B_D26
B_D[31:0]
B_D[31:0]
B_D15
B_D22
B_D29
B_D21
B_D27
B_D9
B_D2
B_D3
B_D6
B_D4
B_D14
B_D30
B_A5
B_A3
B_A18
B_A18
B_A9
B_A7
B_A4
B_A10
B_A11
B_A17
B_A2
B_A5
B_A19
B_A14
B_A19
B_A9
B_A15
B_A15
B_A12
B_A4
B_A2
B_A10
B_A7
B_A16
B_A3
B_A6
B_A13
B_A12B_A11
B_A16
B_A8
B_A13
B_A17
B_A6
B_A8
B_A14
/CS[7:0]
+3.3V +3.3V
+3.3V+3.3V
+3.3V
U2
CY7C1041CV3310ZC
123456789
10111213141516171819202122 23
242526272829303132333435363738394041424344
A0A1A2A3A4
/CE
I/00
I/01
I/02
I/03
VCC
VSS
I/04
I/05
I/06
I/07
/WEA5A6A7A8
A9 A10
A11
A12
A13
A14
NC
I/O8
I/O9
I/O10
I/O11
VCC
VSS
I/O12
I/O13
I/O14
I/O15
/BLE
/BHE
/OE
A15
A16
A17
C1
1nF
C2
1nF
C3
1nF
C4
1nF
U1
CY7C1041CV3310ZC
123456789
10111213141516171819202122 23
242526272829303132333435363738394041424344
A0A1A2A3A4
/CE
I/00
I/01
I/02
I/03
VCC
VSS
I/04
I/05
I/06
I/07
/WEA5A6A7A8
A9 A10
A11
A12
A13
A14
NC
I/O8
I/O9
I/O10
I/O11
VCC
VSS
I/O12
I/O13
I/O14
I/O15
/BLE
/BHE
/OE
A15
A16
A17
C7
0.1uF
C6
0.1uF
C5
0.1uF
C8
0.1uF
B_A[23:0]
/BS[3:0]
/OE
B_D[31:0]
/CS[7:0]
R/W
Page 91

5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
ADDRESS BUS BUFFERS
Address and Data Bus buffers/transceivers used to buffer
the signals for the ASRAM and Flash memories and the
USB controller.
DATA BUS TRANSCEIVERS
AND Gate
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 Buffers D
M523xEVB
B
416Tuesday, July 26, 2005
Title
Size Document Number Rev
Date: Sheet
of
B_A18
B_A15
B_D17
D7
A0
B_D8
D18
D28
D[31:0]
B_A17
A18
B_D16
A11
A7
B_D30
D10
D23
B_D21
B_D10
D30
B_D1
D2
B_A19
B_A4
B_D18
D20
B_D[31:0]
A1
D8
B_D9
D16
A19
B_D13
B_D2
D6
B_D26
A12
A8
D17
B_D31
B_D11
B_D22
B_A20
B_A5
B_D19
A2
B_D27
B_D3
A13
A9
D11
B_D12
D0
B_A21
B_A6
A20
A3
B_A10
A15
D9
B_D28
A14
B_A22
B_A7
B_D0
B_D23
D19
D22
D21
D24A4D25
B_A0
B_A11
B_D4
B_A16
B_A8
D5
A[23:0]
B_D24
D3
A21
D26
B_A12
B_A1
B_D5
D14
B_A[23:0]
B_A9
D12
B_D25
B_A2
B_A13
B_D6
D13
D15
A22
A16
B_D14
A5
B_A14
B_A3
D4
B_D7
D1
D27
A17
B_D15
A10
A6
B_D29
B_D20
D31
D29
B_A23
A23
/CS2
/CS0
/CS1
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
U3
MC74LCX16245DT
23568
9
111213141617192022
2314825244101521
283439
45
4746444341403837363533323029272671831
42
1B1
1B2
1B3
1B4
1B5
1B6
1B7
1B8
2B1
2B2
2B3
2B4
2B5
2B6
2B7
2B8
1DIR
1OE
2OE
2DIR
GND
GND
GND
GND
GND
GND
GND
GND
1A1
1A2
1A3
1A4
1A5
1A6
1A7
1A8
2A1
2A2
2A3
2A4
2A5
2A6
2A7
2A8
VCC
VCC
VCC
VCC
U6
MC74LCX16245DT
23568
9
111213141617192022
2314825244101521
283439
45
4746444341403837363533323029272671831
42
1B1
1B2
1B3
1B4
1B5
1B6
1B7
1B8
2B1
2B2
2B3
2B4
2B5
2B6
2B7
2B8
1DIR
1OE
2OE
2DIR
GND
GND
GND
GND
GND
GND
GND
GND
1A1
1A2
1A3
1A4
1A5
1A6
1A7
1A8
2A1
2A2
2A3
2A4
2A5
2A6
2A7
2A8
VCC
VCC
VCC
VCC
U4
MC74LCX16245DT
23568
9
111213141617192022
2314825244101521
283439
45
4746444341403837363533323029272671831
42
1B1
1B2
1B3
1B4
1B5
1B6
1B7
1B8
2B1
2B2
2B3
2B4
2B5
2B6
2B7
2B8
1DIR
1OE
2OE
2DIR
GND
GND
GND
GND
GND
GND
GND
GND
1A1
1A2
1A3
1A4
1A5
1A6
1A7
1A8
2A1
2A2
2A3
2A4
2A5
2A6
2A7
2A8
VCC
VCC
VCC
VCC
U7
MC74LCX245DT
123456789
10
201918171615141312
11
T/R
A0A1A2A3A4A5A6
A7
GND
VCC
OE
B0B1B2B3B4B5B6
B7
C13
1nF
C9
0.1uF
C10
0.1uF
RP2
4x 4.7K
1 2
3 4
5 6
7 8
12
34
56
78
U5
SN74LVC1G11
A
GND
B
C
VCC
Y
RP1
4x 4.7K
1 2
3 4
5 6
7 8
12
34
56
78
C11
0.1uF
C12
1nF
C15
1nF
C14
1nF
D[31:0] B_D[31:0]
R/W
A[23:0] B_A[23:0]
/CS[7:0]
Page 92

5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
Default setting for JP2 is fitted.
Default setting for JP4 is fitted.
Default setting for JP1 is NOT fitted.
CAN Bus Connector
- 9 way D-type
(Female)
CAN1 and UART2 share the same
DB9 connector on Sheet 15
Default setting for JP3 is NOT fitted.
CAN Channel 0
CAN Channel 1
Transceiver Mode
CAN Termination
CAN Termination
Transceiver Mode
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 CAN Transceivers D
M523xEVB
B
516Tuesday, July 26, 2005
Title
Size Document Number Rev
Date: Sheet
of
+3.3V
+3.3V
+3.3V
+3.3V
+3.3V
JP1
1 2
R3
1K
R2
62
U9
SN65HVD230D
123
4 5
678
D
GND
VCC
R VREF
CANL
CANH
RS
P1
594837261
C16
0.1uF
C17
0.1uF
JP3
1 2
C18
1nF
R1
1K
C19
1nF
R4
62
JP2
1 2
JP4
1 2
U8
SN65HVD230D
123
4 5
678
D
GND
VCC
R VREF
CANL
CANH
RS
CANL1
CANH1
CAN1RX
CAN1TX
CAN0RX
CAN0TX
Page 93

C187
+1.5VP
F16
G12
G11
A9A8A7
VSS
VDD
VDD
TPUCH13
TPUCH29/ERXCLK
TPUCH28/ERXDV
VSS
E4
E5
A4
G13
TCRCLK
F1F2F3
C186
C185
C184
C183
C182
C181
C180
A5
G14
TPUCH15
0.1uF
0.1uF
0.1uF
0.1uF
1nF
1nF
100pF
100pF
A6
G16
G15
H10
A6A5A4
VSS
Core VDD
TPUCH31/ECOL
TPUCH30/ECRS
VDD
F4
F5
of
616Tuesday, July 26, 2005
/SD_CAS
78
M16
SD_CAS
D24
D25
4x 22
CLKOUT
N13
CLKOUT
D26
D27
L4
Place R6 as
close to pin N15
as possible.
R6
JTAG_EN
N14
DDATA3
JTAG_EN
VDD
L5
M1M2M3
/SD_CS1
N15
D21
22
N16
SD_CS1
D22
D23
+3.3VP
NOTE: Place C33, C34 & L1 as close
L1
10uH
EXTAL
P16
P15
P14
VSS
EXTAL
VDDPLL
DDATA2
D19
D20
D13D9D17
eTPU/EthENB
P1
P2
N1N2N3
M4
PLL Filter Circuit
to pins P15 & R15 as possible using a
separate ground plane.
C34
1000pF
C33
0.1uF
VSSPLL VSSPLL
VSSPLL
XTAL
DDATA3
T16
R16
R15
D18
R1
VSSPLL
D16
XTAL
RESET
T15
VSS
PLL_TEST
R14
RSTOUT
T14
RCON
P13
DDATA0
R13
DDATA1
T13
PST0
N12
PST1
P12
PST2
R12
PST3
T12
VDD
M11
TRST/DSCLK
N11
TMS/BKPT
P11
TDO/DSO
R11
TDI/DSI
T11
VDD
L10
VDD
M10
IRQ1
N10
DTIN2
P10
DTOUT2
R10
TCLK/PSTCLK
T10
VSS
K9
VDD
L9
VDD
M9
IRQ5
N9
IRQ4
P9
IRQ3
R9
IRQ2
T9
VSS
J8
VSS
K8
VDD
L8
VDD
M8
TSIZ1
N8
TSIZ0
P8
IRQ7
R8
IRQ6
T8
VSS
K7
VDD
L7
VDD
M7
D0
N7
DTIN1
P7
DTOUT1
R7
OE
T7
VSS
L6
VDD
M6
D3
N6
D2
P6
D1
R6
VSS
T6
VSS
M5
NC
N5
D5
P5
D4
R5
Core VDD
T5
N4
D8
P4
D7
R4
D6
T4
D12
P3
D11
R3
D10
T3
D15
R2
D14
T2
VSS
T1
MCF5235
256MapBGA
DDATA2
Motorola SPS TSPG - TECD ColdFire Group
M523xEVB
Title
DDATA[3:0]
/RESET
1
DDATA[3:0]
PLL Test Point
TP1
/RSTOUT
/RCON
DDATA0
DDATA1
PST0
PST1
PST2
PST3
TRST/DSCLK
TMS/BKPT
TDO/DSO
TDI/DSI
/IRQ1
DTIN2
DTOUT2
TCLK/PSTCLK
/IRQ5
/IRQ4
/IRQ3
/IRQ2
TSIZ1
TSIZ0
/IRQ7
/IRQ6
D0
DTIN1
DTOUT1
/OE
D3
D2
D1
1
VIA2
D5
D4
D9
D8
D7
D6
D12
D11
D10
D15
D14
Size Document Number Rev
SCH-20380 CPU D
C
PST[3:0]
PST[3:0]
/IRQ[7:1]
/IRQ[7:1]
1
Date: Sheet
2
3
4
/SD_CS0
/SD_RAS
/SD_WE
/U2CTS
Default setting for JP25 &
J16
K11
K10
VSS
VDD
DTIN3/U2CTS
DTOUT3/U2RTS
DTOUT3
/U2RTS
JP26 is bewteen pins 1&2
123
JP26
/TS
/TIP
/TA
/TEA
K16
K15
K14
K13
L12
L11
K12
TS
TA
TIP
TEA
VSS
VDD
VDD
CAN0TX
L14
L13
SD_WE
I2C_SCL/CAN0TX
123456
78
123456
RP3
Place RP3 as close to pins,
L13, M13, M14 & M15 as
possible.
R/W
CAN0RX
M15
M14
M13
L16
L15
M12
R/W
VSS
SD_CS0
SD_RAS
I2C_SDA/CAN0RX
DTIN3
A[23:0]
A[23:0]
A1
A3
A2
A0
H16
H15
H14
H13
H12
H11
A3A2A1
A0
VDD
VDD
123
JP25
LTPUODIS
UTPUODIS
J15
J14
J13
J12
J11
J10
J9
VSS
VSS
VDD
VDD
LTPUODIS
UTPUODIS
TM
Motorola ColdFire
Microprocessor MCF5235
U0CTS
U0RXD
DTOUT0
DTIN0
Core VDD
U0TXD
F6
VSS
G1G2G3
U0RTSNCVSS
VDD
VDD
VSS
H1H2H3
G5G6G7
H4
G4
VDD
H5H6H7
CLKMOD0
CLKMOD1
D28
D29
D30
VSS
H8
VSS
J1J2J3
TEST
J4
VDD
VDD
J5J6J7
D31
VDD
VSS
VDD
VDD
K1K2K3
L1L2L3
K4
K5
K6
C26
1nF
U2RXD
CAN1RX
U2TXD
CAN1TX
Default setting for JP7
& JP11 is pins 2&3
A23
A22
/CS[7:0]
/CS[7:0]
/BS[3:0]
/BS[3:0]
I2C_SCL
Default setting for
JP6 & JP8 is pins 1&2
I2C_SDA
JP12
A21
A20
SD_SCKE
123
+1.5VP
/CS4
/CS6
/CS1
/CS5
/CS0
U1TXD
/CS3
/CS7
/CS2
U1RXD
/U1RTS
/U1CTS
/BS0
QSPI_PCS1
Place R5 as
close to pin C10
as possible.
/BS1
/BS2
/BS3
QSPI_PCS0
QSPI_DOUT
EMDIO
EMDC
123
JP7
1
2
3
QSPI_SCK
123
JP8
JP6
123
QSPI_DIN
4
+3.3VP
R5 22
+3.3VP
A[23:0]
C25
1nF
C24
1nF
C23
100pF
C22
100pF
C21
100pF
C20
100pF
A18
A19
B16
A19
VSS
A16
A21
A15
A20
B15
CS4
A14
A23
B14
A22
C14
CS6
A13
CS1
B13
CS5
C13
CS0
D13
A12
CS3
B12
CS7
C12
CS2
D12
VSS
E12
A11
B11
C11
D11
VDD
E11
VSS
F11
BS0
A10
B10
C10
D10
VDD
E10
VDD
F10
VSS
G10
BS1
A9
BS2
B9
BS3
C9
D9
VDD
E9
VDD
F9
VSS
G9
VSS
H9
A8
B8
C8
D8
VDD
E8
VDD
F8
VSS
G8
A7
B7
C7
D7
VDD
E7
VDD
F7
A6
B6
C6
D6
VDD
E6
A5
B5
C5
D5
A4
B4
C4
A3
B3
A2
U10
C15
A18
U1TXD
U1RTS
U1CTS
EMDIO
EMDC
A17
C16
A17
U1RXD
Core VDD
TPUCH0
TPUCH1
TPUCH2
TPUCH3
TPUCH4
TPUCH5
TPUCH6
+3.3VP
A14
A15
D15
D14
A15
A14
QSPI_PCS1
SD_SCKE
QSPI_PCS0
QSPI_DOUT
VSS
A1B1B2
C32
C31
C30
C29
C28
C27
A10
A16
A11
A12
A13
E16
E15
E14
E13
D16
A12
A11
A10
A16
U2TXD/CAN1TX
U2RXD/CAN1RX
QSPI_SCK/I2C_SCL
QSPI_DIN/I2C_SDA
TPUCH16/ETXD0
TPUCH19/ETXD3
TPUCH20/ETXER
TPUCH21/ETXEN
TPUCH17/ETXD1
TPUCH18/ETXD2
TPUCH22/ETXCLK
TPUCH23/ERXER
TPUCH24/ERXD0
TPUCH8
TPUCH7
TPUCH10
TPUCH9
C1C2C3D1D2D3D4
10uF TANT.
0.1uF
0.1uF
0.1uF
0.1uF
1nF
A8
A7
F14
F13
F12
A13
VDD
TPUCH25/ERXD1
TPUCH12
TPUCH11
TPUCH27/ERXD3
TPUCH26/ERXD2
TPUCH14
E1E2E3
A9
F15
TPUCH12
TPUCH7
TPUCH14
TPUCH11
TPUCH10
ETXER
TPUCH[15:0]
JP15
123
TPUCH19
JP17
ETXD3
123
TPUCH16
TPUCH8
JP16
ETXD0
TPUCH9
123
TPUCH24
JP18
ERXD0
123
TPUCH25
JP19
ERXD1
TPUCH4
TPUCH0
TPUCH3
TPUCH1
TPUCH5
TPUCH6
TPUCH2
5
JP9
123
123
TPUCH23
ERXER
TPUCH22
ETXCLK
JP10
123
TPUCH18
ETXD2
JP5
JP11
123
TPUCH17
JP13
ETXD1
123
TPUCH21
D D
ETXEN
JP14
TPUCH20
123
TPUCH13
123
TPUCH26
JP20
ERXD2
TCRCLK
123
TPUCH27
TPUCH15
JP21
ERXD3
123
TPUCH29
TPUCH[15:0]
JP22
123
TPUCH28
ERXCLK
JP23
ERXDV
C C
U0RXD
/U0CTS
123
TPUCH31
DTOUT0
DTIN0
JP24
ECOL
123
TPUCH30
ECRS
VIA1
1
/U0RTS
U0TXD
CLKMOD[1:0]
Default setting for JP5, JP9, JP10,
JP11, JP13-24 is 2 & 3 connected
CLKMOD[1:0]
TPUCH[31:16]
CLKMOD0
CLKMOD1
TPUCH[31:16]
D[31:0]
D29
D30
D31
D28
B B
D21
D22
D23
D19
D17
D18
D13
D20
eTPU/Ethernet Enable
- see page 13
ETPU/ETH
D16
D[31:0]
5
D[31:0]
A A
D26
D24
D27
D25
Page 94

of
1
1
716Tuesday, July 26, 2005
TCLK/PSTCLK
JP28
Default
setting -
FITTED
R7
1 2
10K
Motorola SPS TSPG - TECD ColdFire Group
2
M523xEVB
TMS/BKPT
TDO/DSO
TDI/DSI
TRST/DSCLK
PST3
DDATA3
PST1
/TA
Title
Size Document Number Rev
2
SCH-20380 BDM/JTAG Debug Port D
A
Date: Sheet
NOTE: JP27 is required for some of the legacy BDM
cables that connect pins 9 & 25 of the BDM interface
internally. More recent cables support both core & I/O
voltages. Please check with your BDM cable supplier.
3
I/O Voltage
+3.3V
246
8
101214161820222426
J11357911131517192123
3
25
DDATA[3:0]
1 2
+1.5V
JP27
IMPORTANT NOTE: ONLY 3.3V BDM debugging cables
Core Voltage
4
Default setting for
JP27 is fitted.
PST2
PST0
BDM_/RSTIN
DDATA2 DDATA1
DDATA0
NOTE: 4.7K pull up resistors are used on signals /BKPT, DSCLK, DSI, DSO
& /RESET. A 1K pull up is used for /TA. See page 13 of the schematics.
can be used with the MCF523x processors.
4
DDATA[3:0]
PST[3:0] PST[3:0]
5
5
PST[3:0]
DDATA[3:0]
D D
C C
B B
A A
Page 95

of
816Tuesday, July 26, 2005
1
+2.5VA +2.5VA+2.5VA +2.5VA
2
Place R8, R9, R10 & R11 close to U11.
3
Analog Ethernet Plane
+2.5VPLL +2.5VA
4
C36
C35
R11
R10
R9
R8
0.1uF
0.1uF
49.9 1%
49.9 1%
49.9 1%
49.9 1%
+3.3V
U11
1
Link LED
GREEN
R17
220
GREEN
D4
R18
220
220
Place silk screen LED labels
next to D1 thru' D4.
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 10/100BaseT Ethernet Transceiver D
M523xEVB
B
Title
Size Document Number Rev
Date: Sheet
C51
10uF
2
J2
TX+
TX-
RX+
CT_TX
CT_RX
1234567
RX-NCGND
8
Halo HFJ11-2450E
Separate RJ45 connector
chassis ground.
/IRQ[7:1]
Collision
+3.3V
LED
+3.3V
+3.3V
Full Duplex
LED
GREEN
+3.3V
100BT LED
D3
GREEN
D2
R16
D1
C50
C49
10nF
0.1uF
/IRQ[7:1]
R15
220
12
/IRQ2
FB2
R13
6.49K 1%
+2.5VA +2.5VPLL
R14
10K
4x 51
RP7
78
7 8
56
5 6
34
3 4
12
1 2
4x 51
RP6
78
7 8
56
5 6
34
3 4
12
1 2
Place RP6 & RP7 as close to the
MCF523x (CPU) as possible.
PD#
VDDRX
LED1/SPD100
LED2/DUPLEX
LED3/NWAYEN
RXD0/PHYAD4
VDDIO
GND
RXDV/PCS_LPBK
RXC
101112
2526272829303132333435
LED0/TEST
INT#/PHYAD0
RXER/ISO
GND
VDDIO
GND
CRS/RMII_LPBK
COL/RMII
TXD3
TXD2
TXD1
TXD0
TXEN
TXC/REFCLK
TXER
VDDC
24
23
22
21
20
19
18
17
16
15
14
13
KS8721BL
36
RX-
RX+
GND
GND
FXSD/FXEN
REXT
37
VDDRCV
38
GND
39
TX-
40
TX+
41
VDDTX
42
GND
43
GND
44
XO
45
XI
46
VDDPLL
47
RST#
48
MDIO
MDC
RXD3/PHYAD1
RXD2/PHYAD2
RXD1/PHYAD3
123456789
R12
4.7K
12
FB1
+2.5V
STEWARD HI1206T500R-00
STEWARD HI1206T500R-00
C48
0.1uF
C47
0.1uF
C46
0.1uF
C45
47uF
3
+2.5V
12
34
56
1 2
3 4
5 6
78
RP4 4x 51
7 8
1 2
12
34
56
78
3 4
5 6
7 8
RP5 4x 51
Place RP4 & RP5 as close
to U11 as possible.
+2.5V
NOTE: RP27 is present to ensure
the correct configuration of U11
out of reset.
4x 18K
RP27
78
7 8
56
5 6
34
3 4
12
1 2
C44
C43
C42
0.1uF
0.1uF
0.1uF
4
C41
47uF
+2.5VA
NOTE: Ethernet Ch. physical addr. default setting is addr. =
NOTE: U11 KS8721BL has an on-chip LDO that
/RSTOUT
ETH_CLK
5
1 selected via internal resistor biasing during reset.
derives the +2.5V supply from the +3.3V supply.
EMDIO
EMDC
ERXD3
ERXD2
ERXD1
ERXD0
ERXDV
ERXCLK
ERXER
ETXCLK
C40
0.1uF
ETXER
ETXEN
ETXD0
ETXD1
ETXD2
ETXD3
ECOL
ECRS
C39
1nF
5
C38
0.1uF
Place the capacitors above
close to pins 7 and 24 on U11.
C37
1nF
+3.3V
D D
C C
B B
A A
Page 96

1
2
Place these zero ohm resistors as close to the junction
with the eTPU signals as possible and at an accessible
3
+3.3V
+5V
J3
BEMF_sense_C
BEMF_sense_B
40
J4
R33 120
R26 120
AN7
AN6
R19 0
R24 0
R25 0
R21 0
R23 0
R22 0
R20 0
point to allow removal if required.
1234567891011
Sheilding
BEMF_sense_A
Zero_cross_C
R27 120
AN5
TPUCH6
TPUCH7
R32 0
12
Zero_cross_B
Zero_cross_A
TPUCH5
Place the capacitors & resistors immediately below as close as
ADC Header
possible to the VinX pins on U12, as they represent an RC filter
Sheilding
TPUCH15
for the ADC inputs.
VSSA
I_sense_DCB
I_sense_A
I_sense_B
I_sense_C
V_sense_DCB_3.3
R36 120
R31 120
R30 120
R34 120
R35 120
Place these resistors at an accesible
point to allow removal if required.
AN4
AN3
AN2
AN0
AN1
C64
C179
C63
C62
C61
C60
C59
C58
2.2nF
2.2nF
2.2nF
2.2nF
2.2nF
2.2nF
2.2nF
2.2nF
VSSA
Sheilding
PWM_CB
TPUCH13
VSSA
Sheilding
PWM_CT
TPUCH11
TPUCH12
+3.3V
R37 1M
Sheilding
PWM_BB
TPUCH10
R38
PWM_BT
22K
Sheilding
PWM_AB
TPUCH9
TPUCH[15:0]
Sheilding
TPUCH8
R40 150
R39 100
PWM_AT
123456789101112131415161718192021222324252627282930313233343536373839
LTPUODIS
Molex/39-26-7405
Please place UNI3 on the
silkscreen close to J4
UNI3 connection
+3.3V
V+
OutputB
OutputA
InputA
U15
123
C66
10nF
R41
10K
678
InputB
InputA
4 5
2
GND InputB
+3.3V
Place C67 as
close to U15
as possible
+3.3V
C68
1 3
+3.3V
C69
Place C69 as
close to U16
C67
100nF
LM393M
100nF
+3.3V
I_DCB_FAULT
D5
R42 270
Y1
U16
A1
100nF
as possible
Overcurrent comparator
+3.3V
+3.3V
LED_STATUS
D6
R43 270
Y2
VCC
GND
A2
/TIP
Using GPIO
Inverter
NL27WZ04
(secondary function
on the /TIP pin)
PWM_AT
D7
R44 270
+3.3V
PWM_AB
D8
R45 270
Place C86 as
close to U17 as
possible
+3.3V
+3.3V
+3.3V
PWM_BT
PWM_CB
D9
D10
R47 270
R46 270
+3.3V
14
VCC
1A1Y2A2Y3A3YGND 4Y
U17
1234567 8
C86
100nF
+3.3V
C85
0.1uF
C84
0.1uF
C83
0.1uF
C82
0.1uF
C81
0.1uF
C80
0.1uF
C79
0.1uF
C78
0.1uF
C77
1nF
C76
1nF
C75
1nF
C74
1nF
TPUCH8
PWM_CT
D11
R48 270
TPUCH9
+3.3V
910111213
4A5Y5A6Y6A
TPUCH10
TPUCH1
+3.3V
PWM_BB
D12
R50 270
Inverter
SN74HC04D
TPUCH11
+3.3V
Place C89
+3.3V
TPUCH12
TPUCH3
TPUCH2
C89
100nF
as close to
U18 as
R52
TPUCH13TPUCH4
possible
1k
R54 1K8R53 24
Red led: I_DCB_FAULT
TPUCH1
C90
+3.3V
of
916Tuesday, July 26, 2005
1
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 eTPU connectors and ADC D
M523xEVB
C
Title
Size Document Number Rev
Date: Sheet
Yellow led: PWM_AB, PWM_BB, PWM_CB
Green led: PWM_AT, PWM_BT, PWM_CT, LED_STATUS
2
TCRCLK
+3.3V
Y1
B2
A2
VCC
NL27WZ86
U18
A1B1Y2
470pF
GND
EXOR Logic Gate
TPUCH2
C91
470pF
R58 1K8
R57 24
R56
1k
+3.3V
R62 1K8
R61 24
R59
1k
TPUCH3
C92
+3.3V
470pF
TPUCH4
3
C93
470pF
R65 1K8
R64 24
R63
1k
C73
+3.3V
TPUCH8
23 24
TPUCH26
TPUCH9
25 26
TPUCH27
C72
C71
C70
TPUCH10
27 28
TPUCH28
1nF
1nF
1nF
1nF
TPUCH12
TPUCH11
29 30
TPUCH29
TPUCH30
C88
100nF
+5V
2.2uF
+3.3V
J6
Place C87 and
C88 as close
as possible to
pins 1 & 2 on
R55
4k7
-UP
SW2
+5V
C87
R49
4K7
TSIZ0
Using GPIO (secondary
function on the /TEA pin)
R51
1k8
1
3
SW1
2
+
RUN/STOP
TPUCH[15:0]
TPUCH15
TPUCH14
TPUCH13
eTPU Header
31 32
33 34
35 36
37 38
39 40
TPUCH31
TCRCLK
+3.3V
TPUCH[31:16]
B B
C56
10uF
C52
0.1uF
4
5
QSPI_DIN
QSPI_SCK
+3.3V+5VA
U12
QSPI_DOUT
DOUT
Vdrive
AGND
AGND
SCLK
DIN
CS
AGND
123456789
C54
C53
U13
+5VA
10uF
0.1uF
123
Vin0
AVDD
2.5/3.0V
NC
D D
VSSAVSSA
121314151617181920
Vin4
Vin3
Vin2
Vin1
AVDD
REFIN
AGND
Vin7
Vin6 Vin5
AD7928BRU
10 11
VSSA
C57
0.1uF
678
NC
Vout
+Vin
TEMP
GND TRIM
AD780BR
4 5
VSSA
C55
0.1uF
Please ensure VSSA has a plane of copper under J4, U11 & U12.
C65
100nF
+3.3V
+3.3V
Place C65
as close to
U14 as
possible
Y
VCC
U14
BAGND
AND Gate Logic
NL17SZ08
Please ensure there is thicker gauge copper
between Vout on U13 and REFIN on U12.
TPUCH14
JP29
1 2
QSPI chip select
jumper, default FITTED
QSPI_PCS0
+5V
J5
+3.3V
C C
1 2
UTPUODIS
3 4
5 6
TPUCH17
TPUCH16
LTPUODIS
TPUCH0
7 8
TPUCH18
TPUCH[15:0]
TPUCH1
9 10
TPUCH19
TPUCH3
TPUCH2
11 12
13 14
TPUCH21
TPUCH20
TPUCH4
15 16
TPUCH22
TPUCH6
TPUCH5
17 18
TPUCH23
TPUCH24
19 20
TPUCH7
21 22
TPUCH25
12345
J6
/TEA
Using GPIO (secondary
1 3
2 4
JP30
1 2
default FITTED
6
HS/ENCO Header
Please place HS/ENC0 on
the silkscreen close to J6
function on the TSIZ0 pin)
R60
4K7
+3.3V
-DOWN
SW3
KS11R22CQD
A A
Hall sensors/En coder connector
TSIZ1
Using GPIO (secondary
function on the TSIZ1 pin)
KS11R22CQD
1 3
2 4
4
5
Buttons & switch
Page 97

A[23:0]
of
10 16Tuesday, July 26, 2005
1
A[23:0]A[23:0]A[23:0]
DDATA[3:0]
Motorola SPS TSPG - TECD ColdFire Group
DDATA[3:0]DDATA[3:0]
/SD_CS1
CLKOUT
/SD_CAS/SD_CS0
R/WCAN0TX
CAN0RX/SD_WE
/TS
/TIP
DTOUT3
DTIN3
A2A1A12
A6
A13
A15
A21
A9A7
A3
A5
A16
A17
13579111315171921232527293133353739414345474951535557
2
/BS[3:0]
/CS[7:0]
NOTE: if designing a daughter card to fit these expansion connectors
please ensure all signals are buffered on the daughter card.
/CS[7:0]
/CS[7:0]
/CS[7:0]
J9
246
8
10121416182022242628303234363840424446485052545658
A10
A11
A18
A20 A19
A22
A14A4A8
A0
/TEA
LTPUODIS
UTPUODIS
/BS[3:0]
AMP 177983-2
J7
60
59
58
57
/CS4
55
/CS1
53
/CS6
51
/CS3
U1TXD
U1RXD
/U1RTS
QSPI_PCS1
QSPI_SCK
I2C_SCL
/U2RTS
/U2CTS
3
49
47
45
43
41
39
/BS0
37
/BS1
35
/BS2
33
/BS3
31
29
27
25
TPUCH16
23
TPUCH21
21
TPUCH20
19
TPUCH19
17
TPUCH23
15
TPUCH22
13
TPUCH18
11
TPUCH17
9
TPUCH24
7
5
3
1
A23
56
/CS0
54
/CS5
52
/CS7
50
/CS2
48
46
44
42
40
38
36
34
32
30
28
26
24
22
20
18
16
14
12
10
8
6
4
2
U2TXD
CAN1TX
/U1CTS
U2RXD
CAN1RX
SD_SCKE
QSPI_PCS0
QSPI_DOUT
QSPI_DIN
I2C_SDA
EMDC
EMDIO
TPUCH0
TPUCH1
TPUCH3
TPUCH2
TPUCH5
TPUCH4
TPUCH6
CLKMOD[1:0]
/TA
/SD_RAS
DDATA3
/EXT_RSTIN
59
AMP 177983-2
60
PST[3:0]
DDATA[3:0]
EXTAL XTAL
/IRQ[7:1]
JTAG_EN
TDO/DSO
DTOUT2DTIN2
TSIZ1
DTIN1
PST[3:0]
PST[3:0]
/IRQ[7:1]
/IRQ[7:1]
AMP 177983-2
J10
60
59
58
57
56
55
54
53
52
51
50
49
48
47
DDATA2
PST0
PST1PST2
TRST/DSCLK
/IRQ1
/IRQ5
/IRQ3/IRQ4
/IRQ7
D0
D3
D1
D5
D7
D11
D14D10
46
45
44
43
42
41
40
39
38
37
36
35
34
33
32
31
30
29
28
27
26
25
24
23
22
21
20
19
18
17
16
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
DDATA1
DDATA0
PST3
/IRQ2
/IRQ6
D2
D4
D8
D6
PST[3:0]
/OE
/IRQ[7:1]
TMS/BKPT
TDI/DSI
TCLK/PSTCLK
TSIZ0
DTOUT1
M523xEVB
Title
/RESET
/RCON
1
SCH-20380 Expansion Connectors D
C
Size Document Number Rev
Date: Sheet
2
/RSTOUT
3
TPUCH[31:16]TPUCH[31:16]
4
5
+3.3V
+5V
+1.5V
+3.3V
TPUCH[15:0]
U0RXDDTOUT0
DTIN0U0TXD
/U0RTS
TPUCH26
TPUCH29
TPUCH28
TPUCH31
TPUCH30
CLKMOD1
D31
TPUCH10TPUCH9
TPUCH25
TPUCH27
CLKMOD0
D26
13579111315171921232527293133353739414345474951535557
J8
246
8
10121416182022242628303234363840424446485052545658
+3.3V +1.5V +3.3V+5V +3.3V+1.5V+3.3V +5V
TPUCH7 TPUCH8
TPUCH12
TPUCH11
TPUCH14
TPUCH13
TCRCLK
TPUCH15
/U0CTS
D28
D24
D25
D29 D30
D[31:0]
D27
D13
D23
D9
D12
D15
59
AMP 177983-2
60
D19
D16
D21
D22
D20
D17
D18
TPUCH[15:0] TPUCH[15:0]
TPUCH[15:0]
TPUCH[31:16]
D D
C C
B B
+3.3V
+5V
+1.5V
+3.3V
+1.5V
D[31:0] D[31:0]
D[31:0]
D[31:0]
C109
470pF
C108
470pF
4
C107
470pF
C97
470pF
C106
470pF
C96
470pF
C105
10nF
C95
10nF
C104
10nF
C94
10nF
C103
10nF
C102
10nF
C101
0.1uF
5
C100
0.1uF
C99
1nF
C98
1nF
+5V +3.3V
A A
Page 98

of
11 16Tuesday, July 26, 2005
1
1
B_A[23:0]
C117
0.1uF
C116
0.1uF
C115
0.1uF
C114
0.1uF
C113
1nF
C112
1nF
C111
+3.3V
C110
1nF
1nF
2
+3.3V
C120
C119
C118
0.1uF
0.1uF
1nF
B_D[31:0]
B_D[31:0]
+3.3V
R66
4.7K
JP31
32MBit Flash
Boot
Default setting - JP31 fitted
across pins 1 & 2
1
3
2
B_A21
B_A18
B_A19
B_A20
B_A15
B_A16
B_A17
B_A12
B_A11
B_A13
B_A14B_A2
B_A9
B_A8
B_A10
+3.3V
K8J8K7J7H7K6J6H6K5J5H5G5F5K4J4H4G4K3J3H3K2
B_D9
B_D24
B_D25
B_D26
B_D10
B_D11
B_D27
B_D28
B_D12
B_D31
B_D14
B_D29
B_D13
B_D15B_D0
B_D30
DQ24
H8
VCC
H9
DQ8
G6
DQ25
G7
VSS
G8
DQ26
G9
NC
F6
DQ10
F7
DQ11
F8
DQ27
F9
NC
E6
VSS
E7
DQ28
E8
DQ12
E9
D6
DQ14
D7
DQ29
D8
DQ13
D9
DQ15
C8
VCC
C9
DQ30
B9
U35
CE
A19
DQ9
J9
A8B8A7
NCNCNCNCNC
A16
A17
A18
A13
A14
A15
VCC
DQ31/A-1
VSSNCWORDOEWENCNCNCACCWPNCNCA1A2A3A0A4A5VCC
B7C7A6
B6C6A5
B5
A7A6A8
A10A9A11
A12
VSS
DQ23
DQ22
DQ7
VCC
DQ21
DQ6
VSS
NC
DQ5
DQ4
DQ20
DQ2
DQ18
DQ19
DQ3
DQ16
VSS
VCC
DQ0
DQ1
DQ17
E5A4B4
A3B3B2
C5
D5
C4
D4
B_D[31:0]
J2
J1
H2
H1
G3
G2
G1
F4
F3
F2
F1
E4
E3
E2
E1
D3
D2
D1
C3
C2
C1
Am29PL320D
B_D23
B_D22
B_D7 B_D8
B_D21
B_D6
B_D5
B_D4
B_D20
B_D2
B_D18
B_D19
B_D3
B_D16
B_D1
B_D17
B_D[31:0]
B_A[23:0]B_A[23:0] B_A[23:0]
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 Flash Memory (Fujitsu SSOP OR AMD BGA) D
M523xEVB
C
Title
Size Document Number Rev
Date: Sheet
2
B_A6
B_A4
B_A7
B_A5
Default setting - JP64
fitted across pins 1 & 2
B_A11
B_A12
B_A13
B_A14
B_A15
B_A16
B_A17
B_A3
B_D31
R69
B_D23
4.7K
B_D30
B_D22
B_D29
B_D21
B_D28
B_D20
B_D[31:0]
Only one or the other footprints
will be populated - BGA (U35)
OR SSOP (U19)
3
4
R67
3
4
4.7K
+3.3V
+3.3V
NOTE: The write protect pin (C5)
should not be left floating as
JP32
R68
4.7K
1
inconsistant behaviour of the
Flash device could result.
To use hardware protect on the
top/bottom boot sector set JP32
between pins 2 & 3. To disable
hardware protect set between
pins 1 & 2 (default).
3
2
16 MBit
Flash Boot
JP64
1
3
B_A20
2
B_A9
B_A10
+3.3V
242526272829303132333435363738394041424344
A9
A8
B_A[23:0]
NC
A19
U19
WE#
A18
123456789
B_A19
A10
A17A7A6A5A4A3A2A1A0
B_A7
B_A8
B_A18
A16
A15
A14
A13
A12
A11
BYTE#
CE#
10111213141516171819202122 23
B_A1
B_A2
B_A3
B_A4
B_A5
B_A6
Vss
Vss
DQ7
DQ15/A-1
OE#
DQ0
B_D16
B_D24
DQ14
DQ8
DQ6
DQ1
B_D17
DQ13
DQ9
B_D25
DQ5
DQ2
B_D18
DQ12
DQ10
B_D26
B_D19
DQ4
DQ3
DQ11 Vcc
AMD Am29PL160CB-65RS
B_D27
B_D[31:0]
Memory Size: 1M x 16-bit = 2MB Memory Size: 1M x 32-bit = 4MB
/CS0
5
/OE
R/W
/CS[7:0]
D D
C C
B B
A A
5
Page 99

D
of
12 16Tuesday, July 26, 2005
1
2
3
JP33
JP33 SHOULD BE
INSTALLED DURING
ASSEMBLY
+3.3VP
1 2
1
FB5
1 2
VSSA
VSSA - analog ground for eTPU channels
FB6
1 2
VSSPLL
VSSPLL - filtered ground for CPU PLL module
Filtered ground for plane for ethernet RJ45 connector
+1.5V
D20
MBRS340T3
Motorola SPS TSPG - TECD ColdFire Group
SCH-20380 Power Supply
M523xEVB
B
Title
Size Document Number Rev
Date: Sheet
2
+3.3V
FB3
+5V +5VA
FB4
1 2
1 2
+5VA - filtered power for eTPU ADC
+5V
2 1
R70
270
C122
0.1uF
C121
330uF
R71
+3.3V GREEN POWER LED
D14
560
C127
C126
0.1uF
330uF
D17
+5V GREEN POWER LED
MRA4003T3
D19
D18
MRA4003T3
NOTE: Diodes prevent excessive
difference between 3.3V & 1.5V
rails, at power up
NOTE: Schottky Diode prevents excessive
+3.3V
D16
25uH
D13
25uH
MBRS340T3
L3
L2
2 1
MBRS340T3
2 1
21
MBRS340T3
D22
difference between 3.3V & 1.5V
rails, at power down
+3.3V +1.5V
3
3.3V Regulator
U20 LM2596S-3. 3
VIN VOUT
1 2
4
FB
TAB
GND
~ON/OFF
5
6
3
5.0V Regulator
U21 LM2596S-5
1 2
VIN VOUT
4
FB
TAB
GND
~ON/OFF
5
6
3
+1.5VP
JP34
1 2
C125
1000uF
D15
5A Fast blow.
C124
C123
2 1
MBRS340T3
1nF
0.1uF
4
F1
5
621
SW4
3
4
POWER SW SLIDE-SPST(Board Edge)
5
JP34 SHOULD BE
INSTALLED DURING
ASSEMBLY
LT1086CM
1.5V Regulator
U22
2
3
VOUT
VIN
ADJ
C130
C129
R73 120
1
C128
10uF TANT.
0.1uF
4
330uF
R74 22
5
123
+
Power Jack Connector -
2.1mm diameter
NOTE: the positive terminal of each
power connector must be shown on the
silkscreen of the PCB
DC voltage input range +7 to +14V
P2
-
2-way Bare Wire
Power Connector
Switchcraft RAPC712
1
2
P3
Augat 25V-02
-
+
+5V +1.5V
D D
C C
B B
A A
Page 100

R80
12
4x 4.7K
78
4x 4.7K
+3.3V
+3.3V
RP17
RP16
1 2
/IRQ4
1 2
/CS4
123456
78
3 4
5 6
7 8
/IRQ5
/IRQ7/CS7
/IRQ6
123456
78
3 4
5 6
7 8
/CS6
/CS5
78
5 6
7 8
/BS3
4x 4.7K
/BS[3:0]
+3.3V
+3.3V
RP15
RP14
7 8
/IRQ1
1 2
/CS0
34
56
78
1 2
3 4
5 6
/IRQ3
/IRQ2
123456
3 4
5 6
7 8
/CS3
/CS2
/CS1
56
78
3 4
5 6
7 8
TDI/DSI/OE
TDO/DSO
56
78
3 4
5 6
7 8
/TEA
12
34
4x 4.7K
1 2
TMS/BKPT
TRST/DSCLK
12
34
4x 4.7K
1 2
R/W
/TIP
+3.3V
RP11
+3.3V
RP10
12
34
56
78
1 2
3 4
5 6
7 8
TSIZ0
TSIZ1
/TS
123456
78
1 2
3 4
5 6
7 8
/RSTOUT
UTPUODIS
LTPUODIS
4x 4.7K
4x 4.7K
+3.3V
RP12
1 2
/BS0
123456
3 4
/BS1
/BS2
+3.3V
RP9
1
+3.3V
RP8
4x 4.7K
4x 4.7K
+3.3V
/IRQ[7:1]
/IRQ[7:1]
/CS[7:0]
1K
1
CHIP SELECT 0
/CS0
1
TP7
TRANSFER ACKNOWLEDGE
/TA
1
TP5
TP3
OUTPUT ENABLE
/TA
/OE
1
GROUND
1
TP12
GROUND
TP10
of
13 16Tuesday, July 26, 2005
1
/CS[7:0]
Motorola SPS TSPG - TECD ColdFire Group
1
TP2
1
TRANSFER START
/TS
TP4
1
READ NOT WRITE
R/W
TP6
1
CPU CLOCK I/P
Place TP6 as
close to EXTAL
as possible
TP8
1
CPU CLOCK O/P
CLKOUT
1
TP11
TP9
GROUND
GROUND
Important Note - all unconnected pull-up and pull-down
resistor pack connections, on all schematics pages, need
to be connected to an unmasked via.
NOTE: Place TP9, TP10, TP11 & TP12 at the corners of the PCB
to allow easy connection of 'scope probe ground leads.
M523xEVB
Title
SCH-20380 Reset Configuration & Clock selection D
C
Size Document Number Rev
Date: Sheet
2
OSCILLATOR - dual layout footprint
3
+3.3V
4
+3.3V
ETH_CLK
NOTE: signal track lengths between these clock
circuits and the MCF523x should be minimised.
+3.3V
VDD
U23
OE
GND CLK
OE VDD
1
7 8144 11
for 8 AND 14 pin socketed DIL osc.'s
R76
10K
/IRQ[7:1]
/IRQ[7:1]
/IRQ7
R77 100
D23 RED -INT7 LED
R75
270
25MHz
VSSPLL
+3.3V
1
JP35
3
1
J11
External Clock Input (SMA connector)
R78
270
+3.3V
+3.3V
4x 10K
RP13
/BS[3:0]
2
5
4
3
2
78
7 8
56
5 6
34
3 4
12
1 2
JP36
1
VSSPLL
D24
RED RESET LED
C
U26
A
R79 100
EXTAL
2
3
25MHz
Y1
/RESET/BDM_RSTIN
Buffered and "OR'd" /RSTI signal to the CPU from the
BDM port, expansion connectors or reset switch.
+3.3V
Y
VCC
SN74LVC1G11
GND
B
/CS[7:0]
XTAL
RP19
4x 10
78
56
34
12
JP37
C132
C131
10pF
10pF
7 8
5 6
3 4
1 2
Crystal Enable
1 2
D26
VSSPLL
JP39
1 2
DTOUT0
DTIN0
D28
DTIN0 LED
JP41
DTOUT1
DTIN1
1 2
DTIN1 LED
D30
JP43
1 2
DTOUT2
DTIN2
D32
DTIN2 LED
JP45
DTOUT3
1 2
DTIN3
DTIN3 LED
JTAG_EN
/RCON
CLKMOD1
CLKMOD0
IMPORTANT NOTE: THE /RSTOUT SIGNAL MUST BE
USED TO DRIVE THE OUTPUT ENABLE PINS OF U7
TO ALLOW THE D16, D17, D18, D19, D21, D24, D25
& D26 SIGNALS TO BE LATCHED CORRECTLY BY
THE MCF523x FOR CONFIGURATION AT RESET.
+3.3V
123456
78
4x 4.7K
RP22
1 2
3 4
5 6
7 8
123456
78
4x 4.7K
RP21
1 2
3 4
5 6
7 8
+3.3V
123456
78
4x 4.7K
RP20
1 2
3 4
5 6
7 8
CLKMOD[1:0]
CLKMOD[1:0]
+3.3V
U27
123456789
/RSTOUT
CLKMOD0
CLKMOD1
JTAG_EN
RCON
D16
D20
D19
D24
D21
OE2
VCC
D0D1D2D3D4D5D6D7GND O7
OE1
D25
D24
D21
D20
D19
D16
D25
121314151617181920
O6O5O4O3O2O1O0
10 11
ETPU/ETH
D[31:0]
MC74LCX541DT
Encoded Boot Device (Port Size)
Encoded Operating Mode
Encoded Clock Mode
D[31:0]
2
Ethernet/eTPU Mode (eTPU channels 16 to 31)
SW7-11 Mode
----------- -----------
OFF eTPU enabled
ON Ethernet enabled
Encoded Address/Chip Select Mode
SW7-9 SW7-10 Mode
----------- ----------- --------------------------
SW7-6 SW7-7 Mode
----------- ----------- --------------------------
OFF OFF External (32-bit)
OFF ON External (8-bit)
SW7-5 Mode
----------- -----------
OFF Reserved
ON Master
3
OFF OFF PF[7:5] = /CS[6:4]
OFF ON PF7 = /CS6, PF[6:5] = A[22:21]
ON OFF PF[7:6] = /CS[6:5], PF[5] = A21
ON ON PF[7:5] = A[23:21]
ON OFF External (16-bit)
ON ON External (32-bit)
4
NOTE: Please place these tables on the silkscreen on the topside of the PCB close to SW7.
SW7-3 SW7-4 Mode
----------- ----------- --------------------------------------------------
OFF OFF External Clock - (No PLL)
OFF ON 1:1 PLL
ON OFF Normal PLL operation (Ext. Clock)
ON ON Normal PLL operation (Ext. Crystal)
/EXT_RSTIN
678
N.C.
RESET
RESET
MR
VCC
GND
PFI PFO
U24
123
4 5
ADM708SAR
DEBOUNCED /IRQ7
5
SIGNAL
+3.3V
SW5
KS11R22CQD
ABORT/-INT7
D D
678
N.C.
RESET
RESET
MR
VCC
GND
PFI PFO
U25
HARD RESET & VOLTAGE
SENSE CONTROLLER
123
4 5
+3.3V
SW6
RESET
KS11R23CQD
ADM708SAR
+3.3V
NOTE: Please place D25 through D32 together in a line.
Default setti ng for JP38 through JP45 is fitted.
SW7
1 2
DTOUT1 LED
JP42
1 2
DTOUT2 LED
JP44
1 2
DTOUT3 LED
Closed/On Open/Off
Configuration DIP switch - Grayhill 78RB12
5
JP38
1 2
DTOUT0 LED
JP40
+3.3V
4x 10
RP18
D25
78
7 8
56
5 6
34
3 4
12
1 2
C C
D27
D29
D31
------------------------ OFF - SW7 - ON ------------------------
Chip Config. Off 1 Chip Config. On
JTAG Interface Enabled 2 BDM Interface Enabled
Encoded Clock Mode 3 Encoded Clock Mode
Encoded Clock Mode 4 Encoded Clock Mode
Encoded Oper. Mode 5 Encoded Oper. Mode
Encoded Boot Device 6 Encoded Boot Device
Encoded Boot Device 7 Encoded Boot Device
Partial Bus Drive 8 Full Bus Drive
Encoded Address Mode 9 Encoded Address Mode
Encoded Address Mode 10 Encoded Address Mode
Note: default setting for SW7 is all switches closed/on.
B B
A A
eTPU Enabled 11 Ethernet Enabled
 Loading...
Loading...