


www.DataSheet4U.com
查询MC705P6A供应商
MC68HC705P6A
Advance Information Data Sheet
M68HC05
Microcontrollers
MC68HC705P6A
Rev. 2.1
9/2005
freescale.com
This document contains certain information on a new product.Specifications and information herein are subject to change without notice.
Blank
MC68HC705P6A
Advance Information Data Sheet
To provide the most up-to-date information, the revision of our documents on the World Wide Web will be
the most current. Your printed copy may be an earlier revision. To verify you have the latest information
available, refer to:
http://www.freescale.com/
The following revision history table summarizes changes contained in this document. For your
convenience, the page number designators have been linked to the appropriate location.
Revision History
Date
November,
2001
September,
2005
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.
© Freescale Semiconductor, Inc., 2005. All rights reserved.
Revision
Level
Format update to current publication standards N/A
2.0
2.1 Updated to meet Freescale identity guidelines. Throughout
Figure 11-1. Mask Option Register (MOR) — Definition of bit 6
corrected.
Description
Page
Number(s)
92
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 3

Revision History
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
4 Freescale Semiconductor

List of Chapters
Chapter 1 General Description. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .13
Chapter 2 Memory. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .19
Chapter 3 Operating Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .27
Chapter 4 Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .31
Chapter 5 Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .33
Chapter 6 Input/Output Ports . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .37
Chapter 7 Serial Input/Output Port (SIOP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .41
Chapter 8 Capture/Compare Timer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .45
Chapter 9 Analog Subsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .53
Chapter 10 EPROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .57
Chapter 11 Mask Option Register (MOR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .63
Chapter 12 Central Processor Unit (CPU) Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .67
Chapter 13 Instruction Set . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .71
Chapter 14 Electrical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .85
Chapter 15 Mechanical Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .93
Chapter 16 Ordering Information. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .95
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 5

List of Chapters
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
6 Freescale Semiconductor
Table of Contents
Chapter 1
General Description
1.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.2 Features. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3 Functional Pin Description . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.1 V
1.3.2 OSC1 and OSC2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.3.2.1 Crystal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.2.2 Ceramic Resonator. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.2.3 External Clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.3 RESET
1.3.4 PA0–PA7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.5 PB5/SDO, PB6/SDI, and PB7/SCK . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.6 PC0-PC2, PC3/AD3, PC4/AD2, PC5/AD1, PC6/AD0, and PC7/V
1.3.7 PD5 and PD7/TCAP. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
1.3.8 TCMP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.3.9 IRQ
2.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.2 User Mode Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.3 Bootloader Mode Memory Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.4 Input/Output and Control Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.5 RAM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.6 EPROM/ROM . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2.7 Mask Option Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.8 Computer Operating Properly (COP) Clear Register. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
and VSS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
DD
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
. . . . . . . . . . . . . . . . 16
REFH
/VPP (Maskable Interrupt Request) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
Chapter 2
Memory
Chapter 3
Operating Modes
3.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.2 User Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.3 Bootloader Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3.4 Low-Power Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4.1 STOP Instruction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4.1.1 Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4.1.2 Halt Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.4.2 WAIT Instruction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
3.5 COP Watchdog Timer Considerations. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 7
Table of Contents
Chapter 4
Resets
4.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.2 External Reset (RESET
4.3 Internal Resets. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3.1 Power-On Reset (POR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.3.2 Computer Operating Properly (COP) Reset. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Chapter 5
Interrupts
5.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.2 Interrupt Types. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2.1 Reset Interrupt Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2.2 Software Interrupt (SWI) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2.3 Hardware Interrupts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2.3.1 External Interrupt (IRQ
5.2.3.2 Input Capture Interrupt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
5.2.3.3 Output Compare Interrupt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5.2.3.4 Timer Overflow Interrupt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Chapter 6
Input/Output Ports
6.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.2 Port A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.3 Port B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.4 Port C. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.5 Port D. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.6 I/O Port Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Chapter 7
Serial Input/Output Port (SIOP)
7.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
7.2 SIOP Signal Format . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7.2.1 Serial Clock (SCK) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7.2.2 Serial Data Input (SDI). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7.2.3 Serial Data Output (SDO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7.3 SIOP Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.3.1 SIOP Control Register (SCR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.3.2 SIOP Status Register (SSR) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7.3.3 SIOP Data Register (SDR). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
8 Freescale Semiconductor
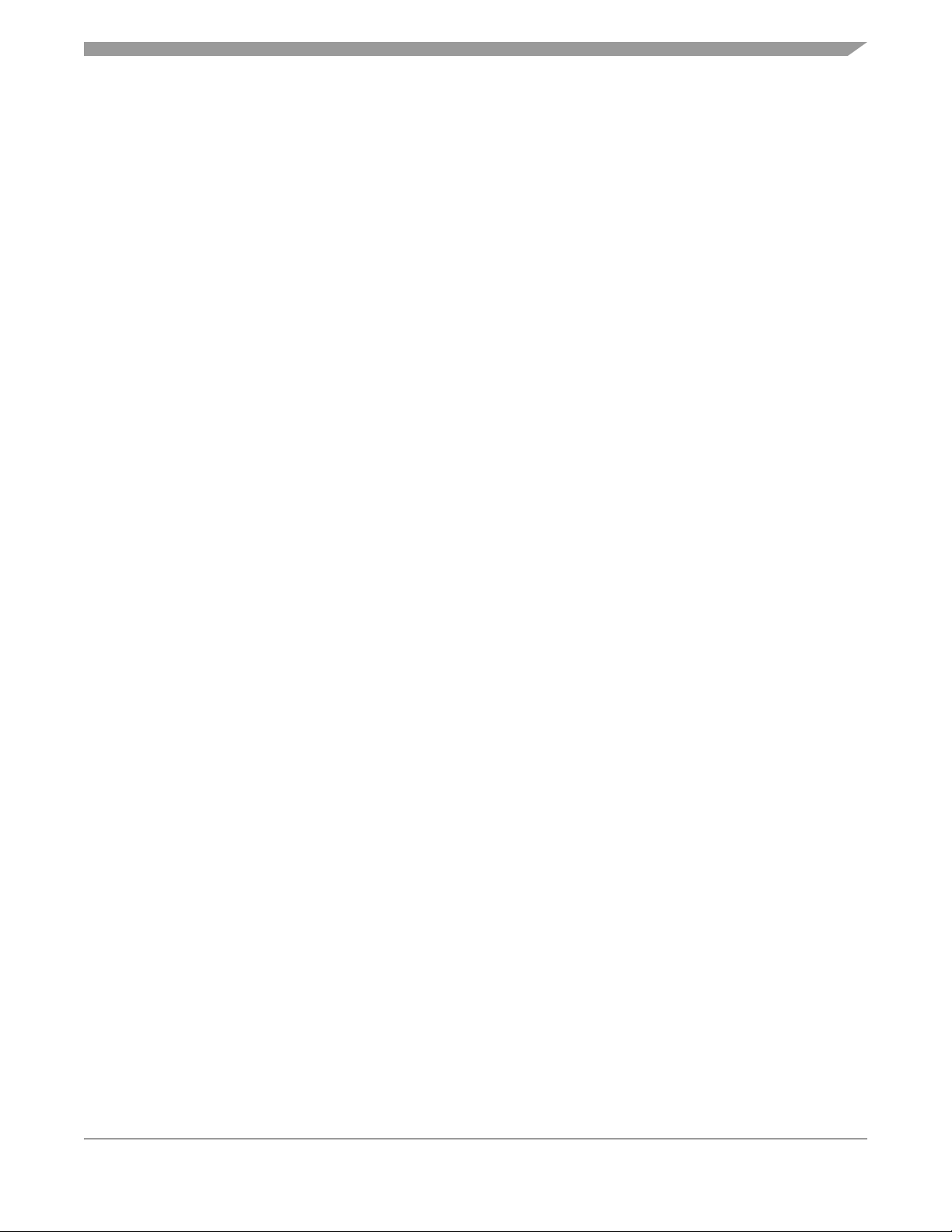
Table of Contents
Chapter 8
Capture/Compare Timer
8.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
8.2 Timer Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.2.1 Input Capture . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.2.2 Output Compare. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.3 Timer I/O Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
8.3.1 Timer Control Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
8.3.2 Timer Status Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
8.3.3 Timer Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.3.4 Alternate Timer Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8.3.5 Input Capture Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.3.6 Output Compare Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
8.4 Timer During Wait/Halt Mode. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
8.5 Timer During Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
Chapter 9
Analog Subsystem
9.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.2 Analog Section. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.2.1 Ratiometric Conversion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.2.2 Reference Voltage (V
9.2.3 Accuracy and Precision . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.3 Conversion Process. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.4 Digital Section . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.4.1 Conversion Times . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.4.2 Internal versus External Oscillator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.4.3 Multi-Channel Operation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.5 A/D Status and Control Register (ADSC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
9.6 A/D Conversion Data Register (ADC) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
9.7 A/D Subsystem Operation during Halt/Wait Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
9.8 A/D Subsystem Operation during Stop Mode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
REFH
Chapter 10
EPROM
10.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
10.2 EPROM Erasing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
10.3 EPROM Programming Sequence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
10.4 EPROM Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
10.5 EPROM Programming Register (EPROG) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
10.6 EPROM Bootloader . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
10.7 Programming from an External Memory Device . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 9

Table of Contents
Chapter 11
Mask Option Register (MOR)
11.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
11.2 Mask Option Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
11.3 MOR Programming . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
Chapter 12
Central Processor Unit (CPU) Core
12.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
12.2 Registers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
12.2.1 Accumulator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
12.2.2 Index Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
12.2.3 Stack Pointer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
12.2.4 Program Counter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
12.2.5 Condition Code Register . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
Chapter 13
Instruction Set
13.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
13.2 Addressing Modes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
13.2.1 Inherent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
13.2.2 Immediate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
13.2.3 Direct . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
13.2.4 Extended . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
13.2.5 Indexed, No Offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
13.2.6 Indexed, 8-Bit Offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
13.2.7 Indexed,16-Bit Offset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
13.2.8 Relative . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
13.3 Instruction Types . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
13.3.1 Register/Memory Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
13.3.2 Read-Modify-Write Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
13.3.3 Jump/Branch Instructions. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
13.3.4 Bit Manipulation Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
13.3.5 Control Instructions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
13.4 Instruction Set Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
13.5 Opcode Map . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Chapter 14
Electrical Specifications
14.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
14.2 Maximum Ratings . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
14.3 Operating Temperature Range . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
14.4 Thermal Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
14.5 5.0-Volt DC Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
14.6 3.3-Volt DC Electrical Charactertistics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
14.7 A/D Converter Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
10 Freescale Semiconductor

Table of Contents
14.8 EPROM Programming Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
14.9 SIOP Timing. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
14.10 Control Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
Chapter 15
Mechanical Specifications
15.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
15.2 Plastic Dual In-Line Package (Case 710) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
15.3 Small Outline Integrated Circuit Package (Case 751F) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
Chapter 16
Ordering Information
16.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
16.2 MC Order Numbers . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 11

Table of Contents
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
12 Freescale Semiconductor

Chapter 1
General Description
1.1 Introduction
The MC68HC705P6A is an EPROM version of the MC68HC05P6 microcontroller. It is a low-cost
combination of an M68HC05 Family microprocessor with a 4-channel, 8-bit analog-to-digital (A/D)
converter, a 16-bit timer with output compare and input capture, a serial communications port (SIOP), and
a computer operating properly (COP) watchdog timer. The M68HC05 CPU core contains 176 bytes of
RAM, 4672 bytes of user EPROM, 239 bytes of bootloader ROM, and 21 input/output (I/O) pins (20
bidirectional, 1 input-only). This device is available in either a 28-pin plastic dual in-line (PDIP) or a 28-pin
small outline integrated circuit (SOIC) package.
A functional block diagram of the MC68HC705P6A is shown in Figure 1-1.
1.2 Features
Features of the MC68HC705P6A include:
• Low cost
• M68HC05 core
• 28-pin SOIC, PDIP, or windowed DIP package
• 4672 bytes of user EPROM (including 48 bytes of page zero EPROM and 16 bytes of user vectors)
• 239 bytes of bootloader ROM
• 176 bytes of on-chip RAM
• 4-channel 8-bit A/D converter
• SIOP serial communications port
• 16-bit timer with output compare and input capture
• 20 bidirectional I/O lines and 1 input-only line
• PC0 and PC1 high-current outputs
• Single-chip, bootloader, and test modes
• Power-saving stop, halt, and wait modes
• Static EPROM mask option register (MOR) selectable options:
– COP watchdog timer enable or disable
– Edge-sensitive or edge- and level-sensitive external interrupt
– SIOP most significant bit (MSB) or least significant bit (LSB) first
– SIOP clock rates: OSC divided by 8, 16, 32, or 64
– Stop instruction mode, STOP or HALT
– EPROM security external lockout
– Programmable keyscan (pullups/interrupts) on PA0–PA7
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 13
General Description
COP
INTERNAL
CPU CLOCK
÷2
OSC
OSC 1
OSC 2
RESET
IRQ/V
PB5/SDO
PB6/SDI
PB7/SCK
CPU CONTROL
M68HC05 CPU
PP
CPU REGISTERS
0 0 0 STK PNTR1100000
PROGRAM COUNTER
COND CODE REG 1 1 1 I N Z CH
SRAM — 176 BYTES
USER EPROM — 4672 BYTES
BOOTLOADER ROM — 239 BYTES
PORT B AND
SIOP
REGISTERS
AND LOGIC
ALU
ACCUM
INDEX REG
÷4
16-BIT TIMER
1 INPUT CAPTURE
1 OUTPUT COMPARE
PORT D LOGIC
A/ D CONVERTER
PORT C
DATA DIRECTION REGISTER
DATA DIRECTION REG
MUX
PORT A
PD7/TCAP
TCMP
PD5
PC7/VR
EFH
PC6/AD0
PC5/AD1
PC4/AD2
PC3/AD3
PC2
PC1
PC0
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
V
DD
V
SS
Figure 1-1. MC68HC705P6A Block Diagram
NOTE
A line over a signal name indicates an active low signal. For example,
RESET is active high and RESET
is active low.
Any reference to voltage, current, or frequency specified in the following
sections will refer to the nominal values. The exact values and their
tolerances or limits are specified in Chapter 14 Electrical Specifications.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
14 Freescale Semiconductor
Functional Pin Description
1.3 Functional Pin Description
The following paragraphs describe the functionality of each pin on the MC68HC705P6A package. Pins
connected to subsystems described in other chapters provide a reference to the chapter instead of a
detailed functional description.
1.3.1 VDD and V
SS
Power is supplied to the MCU through VDD and VSS. VDD is connected to a regulated +5 volt supply and
is connected to ground.
V
SS
Very fast signal transitions occur on the MCU pins. The short rise and fall times place very high
short-duration current demands on the power supply. To prevent noise problems, take special care to
provide good power supply bypassing at the MCU. Use bypass capacitors with good high-frequency
characteristics and position them as close to the MCU as possible. Bypassing requirements vary,
depending on how heavily the MCU pins are loaded.
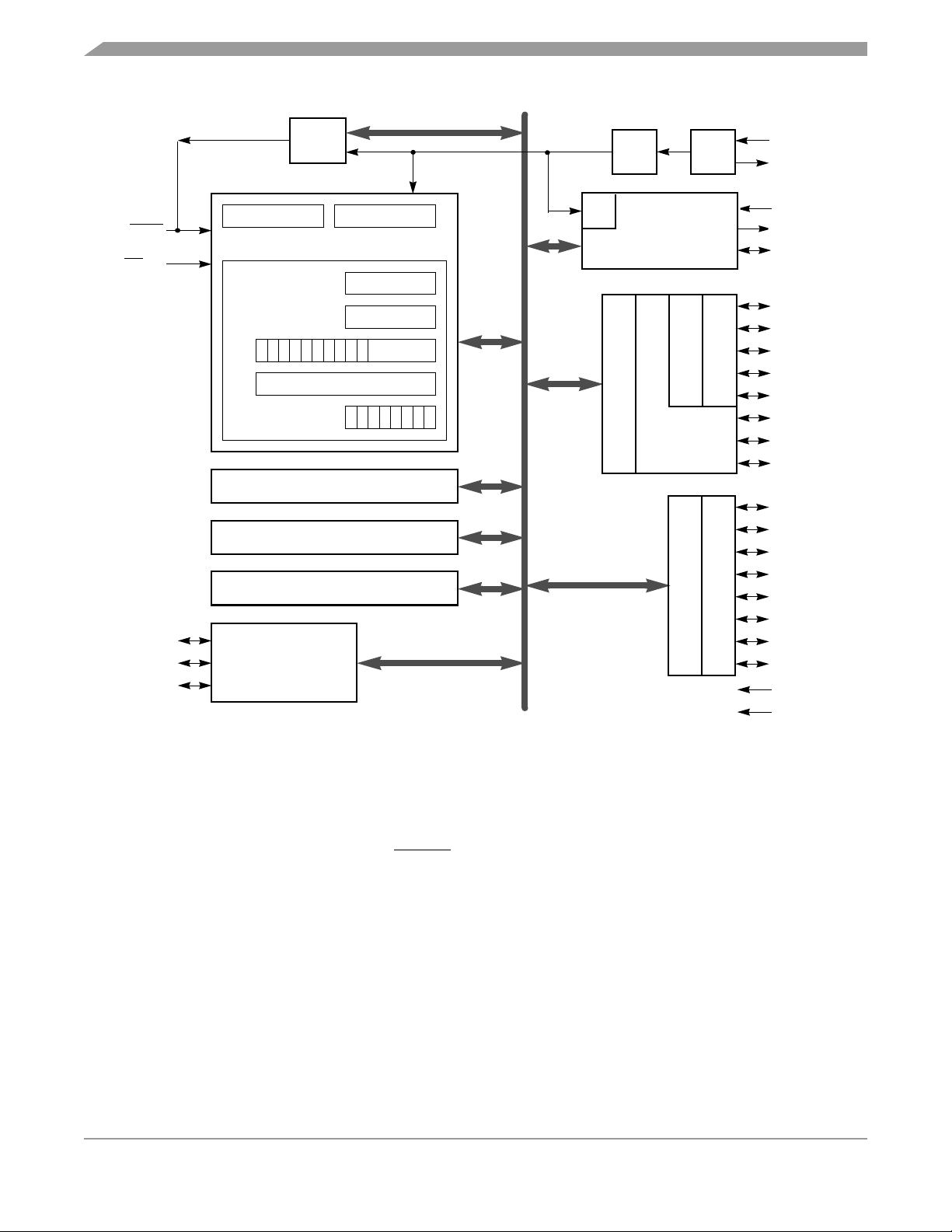
1.3.2 OSC1 and OSC2
The OSC1 and OSC2 pins are the control connections for the on-chip oscillator. The OSC1 and OSC2
pins can accept the following:
1. A crystal as shown in Figure 1-2(a)
2. A ceramic resonator as shown in Figure 1-2(a)
3. An external clock signal as shown in Figure 1-2(b)
The frequency, f
clock operating frequency, f
is clear when a STOP instruction is executed.
, of the oscillator or external clock source is divided by two to produce the internal bus
osc
. The oscillator cannot be turned off by software unless the MOR bit, SWAIT,
op
OSC1 OSC2
4.7 MΩ
37 pF 37 pF
(a) Crystal or Ceramic
Resonator Connections
Figure 1-2. Oscillator Connections
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
MCU
To VDD (or STOP) To VDD (or STOP)
OSC1 OSC2
UNCONNECTED
EXTERNAL CLOCK
(b) External Clock Source
Connections
MCU
Freescale Semiconductor 15

General Description
1.3.2.1 Crystal
The circuit in Figure 1-2(a) shows a typical oscillator circuit for an AT-cut, parallel resonant crystal. Follow
the crystal manufacturer’s recommendations, as the crystal parameters determine the external
component values required to provide maximum stability and reliable startup. The load capacitance
values used in the oscillator circuit design should include all stray capacitances. Mount the crystal and
components as close as possible to the pins for startup stabilization and to minimize output distortion.
1.3.2.2 Ceramic Resonator
In cost-sensitive applications, use a ceramic resonator in place of a crystal. Use the circuit in Figure 1-2(a)
for a ceramic resonator and follow the resonator manufacturer’s recommendations, as the resonator
parameters determine the external component values required for maximum stability and reliable starting.
The load capacitance values used in the oscillator circuit design should include all stray capacitances.
Mount the resonator and components as close as possible to the pins for startup stabilization and to
minimize output distortion.
1.3.2.3 External Clock
An external clock from another CMOS-compatible device can be connected to the OSC1 input, with the
OSC2 input not connected, as shown in Figure 1-2(b).
1.3.3 RESET
Driving this input low will reset the MCU to a known startup state. The RESET pin contains an internal
Schmitt trigger to improve its noise immunity. Refer to Chapter 4 Resets.
1.3.4 PA0–PA7
These eight I/O pins comprise port A. The state of any pin is software programmable and all port A lines
are configured as inputs during power-on or reset. Port A has mask-option register enabled interrupt
capability with internal pullup devices selectable for any pin. Refer to Chapter 6 Input/Output Ports.
1.3.5 PB5/SDO, PB6/SDI, and PB7/SCK
These three I/O pins comprise port B and are shared with the SIOP communications subsystem. The
state of any pin is software programmable, and all port B lines are configured as inputs during power-on
or reset. Refer to Chapter 6 Input/Output Ports and Chapter 7 Serial Input/Output Port (SIOP).
1.3.6 PC0-PC2, PC3/AD3, PC4/AD2, PC5/AD1, PC6/AD0, and PC7/V
REFH
These eight I/O pins comprise port C and are shared with the A/D converter subsystem. The state of any
pin is software programmable and all port C lines are configured as inputs during power-on or reset. Refer
to Chapter 6 Input/Output Ports and Chapter 9 Analog Subsystem.
1.3.7 PD5 and PD7/TCAP
These two I/O pins comprise port D and one of them is shared with the 16-bit timer subsystem. The state
of PD5 is software programmable and is configured as an input during power-on or reset. PD7 is always
an input. It may be read at any time, regardless of which mode of operation the 16-bit timer is in. Refer to
Chapter 6 Input/Output Ports and Chapter 8 Capture/Compare Timer.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
16 Freescale Semiconductor

Functional Pin Description
1.3.8 TCMP
This pin is the output from the 16-bit timer’s output compare function. It is low after reset. Refer to
Chapter 8 Capture/Compare Timer.
1.3.9 IRQ/VPP (Maskable Interrupt Request)
This input pin drives the asynchronous interrupt function of the MCU in user mode and provides the VPP
programming voltage in bootloader mode. The MCU will complete the current instruction being executed
before it responds to the IRQ
internally to signify an interrupt has been requested. When the MCU completes its current instruction, the
interrupt latch is tested. If the interrupt latch is set and the interrupt mask bit (I bit) in the condition code
register is clear, the MCU will begin the interrupt sequence.
interrupt request. When the IRQ/VPP pin is driven low, the event is latched
Depending on the MOR LEVEL bit, the IRQ
the IRQ
be held low for at least one t
set), the IRQ
IRQ
/VPP pin and/or while the IRQ/VPP pin is held in the low state. In either case, the IRQ/VPP pin must
time period. If the edge- and level-sensitive mode is selected (LEVEL bit
ILIH
/VPP input pin requires an external resistor connected to VDD for wired-OR operation. If the
/VPP pin is not used, it must be tied to the VDD supply. The IRQ/VPP pin input circuitry contains an
/VPP pin will trigger an interrupt on either a negative edge at
internal Schmitt trigger to improve noise immunity. Refer to Chapter 5 Interrupts.
NOTE
If the voltage level applied to the IRQ
/VPP pin exceeds VDD, it may affect
the MCU’s mode of operation. See Chapter 3 Operating Modes.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 17

General Description
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
18 Freescale Semiconductor

Chapter 2
Memory
2.1 Introduction
The MC68HC705P6A utilizes 13 address lines to access an internal memory space covering 8 Kbytes.
This memory space is divided into I/O, RAM, ROM, and EPROM areas.
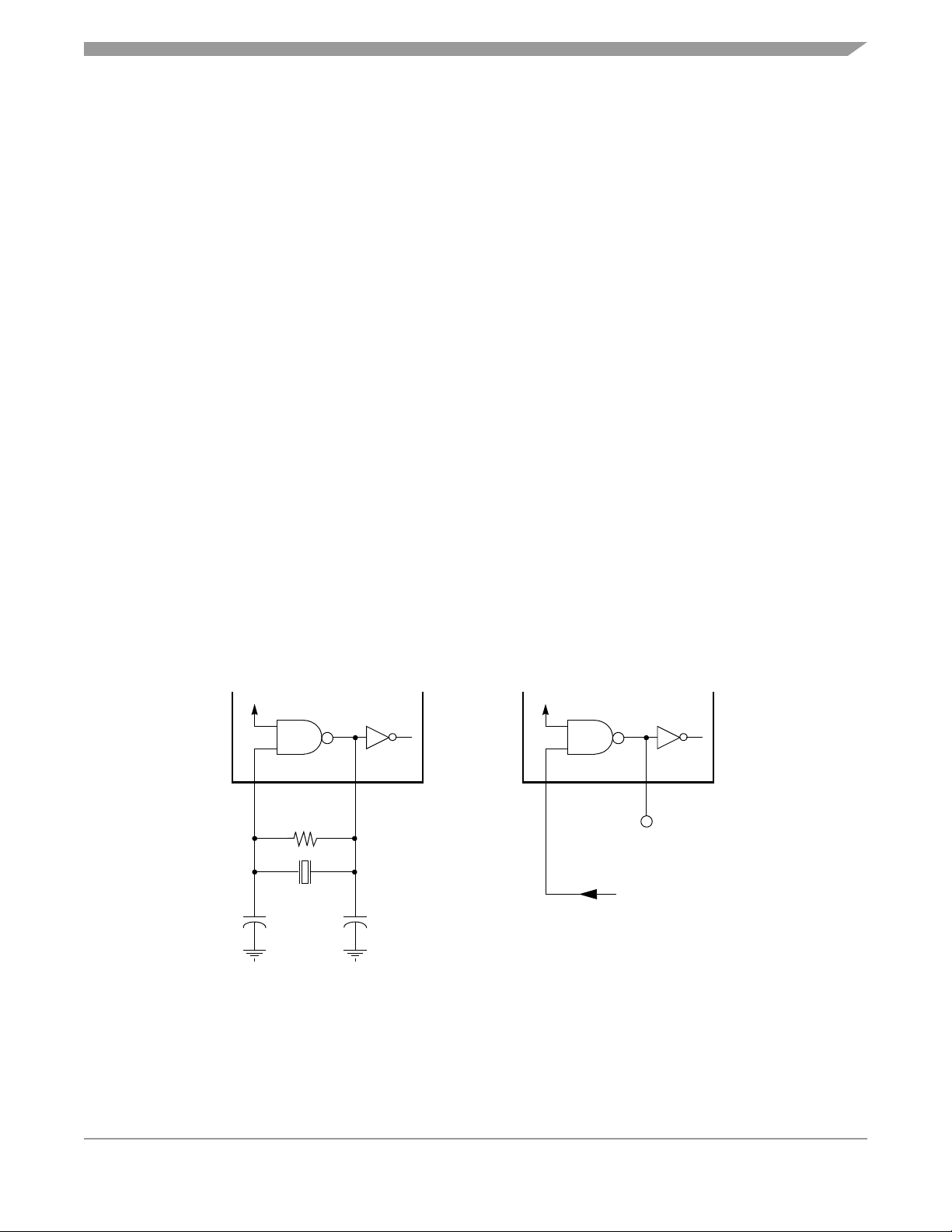
2.2 User Mode Memory Map
When the MC68HC705P6A is in the user mode, the 32 bytes of I/O, 176 bytes of RAM, 4608 bytes of user
EPROM, 48 bytes of user page zero EPROM, 239 bytes of bootloader ROM, and 16 bytes of user vectors
EPROM are all active as shown in Figure 2-1.
2.3 Bootloader Mode Memory Map
Memory space is identical to the user mode. See Figure 2-1.
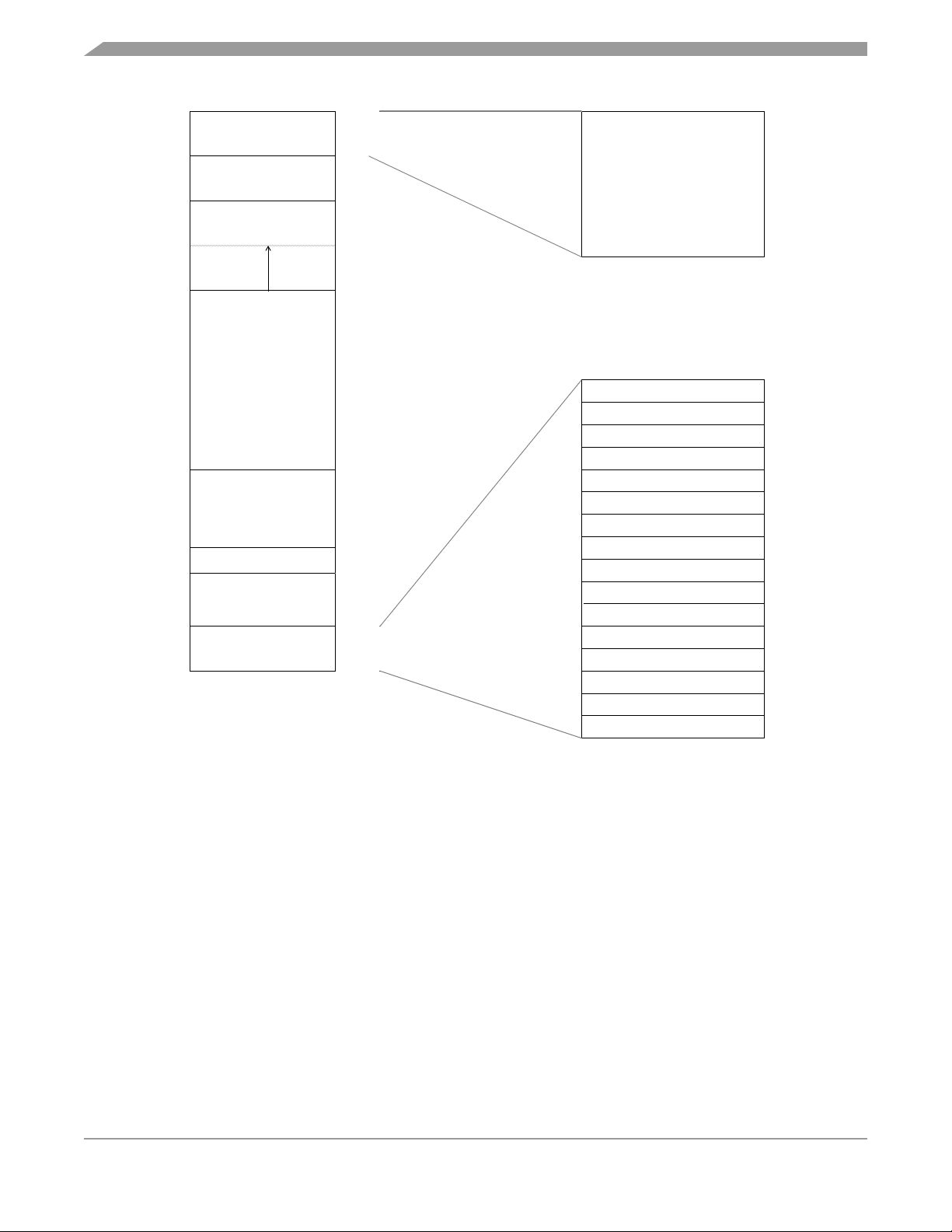
2.4 Input/Output and Control Registers
Figure 2-2 and Figure 2-3 briefly describe the I/O and control registers at locations $0000–$001F.
Reading unimplemented bits will return unknown states, and writing unimplemented bits will be ignored.
2.5 RAM
The user RAM consists of 176 bytes (including the stack) at locations $0050 through $00FF. The stack
begins at address $00FF. The stack pointer can access 64 bytes of RAM from $00FF to $00C0.
NOTE
Using the stack area for data storage or temporary work locations requires
care to prevent it from being overwritten due to stacking from an interrupt
or subroutine call.
2.6 EPROM/ROM
There are 4608 bytes of user EPROM at locations $0100 through $12FF, plus 48 bytes in user page zero
locations $0020 through $004F, and 16 additional bytes for user vectors at locations $1FF0 through
$1FFF. The bootloader ROM and vectors are at locations $1F01 through $1FEF.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 19
Memory
$0000
$001F
$0020
$004F
$0050
$00BF
$00C0
$00FF 0255
$0100
$12FF
$1300
$1EFE 7934
$1EFF
$1F00
$1F01 7937
$1FEF
$1FF0
$1FFF
MASK OPTION REGISTERS
AND VECTORS 239 BYTES
USER VECTORS EPROM
I/O
32 BYTES
USER EPROM
48 BYTES
INTERNAL RAM
176 BYTES
STACK
64 BYTES
USER EPROM
4608 BYTES
UNIMPLEMENTED
3071 BYTES
BOOTLOADER ROM
16 BYTES
0000
0031
0032
0079
0080
0191
0192
0256
4863
4864
7935
7936
8175
8176
8191
I/O REGISTERS
SEE Figure 2-2
COP CLEAR REGISTER
UNUSED
UNUSED
UNUSED
UNUSED
UNUSED
UNUSED
UNUSED
TIMER VECTOR (HIGH BYTE)
TIMER VECTOR (LOW BYTE)
IRQ VECTOR (HIGH BYTE)
IRQ VECTOR (LOW BYTE)
SWI VECTOR (HIGH BYTE)
SWI VECTOR (LOW BYTE)
RESET VECTOR (HIGH BYTE)
RESET VECTOR (LOW BYTE)
(1)
$0000
$001F
$1FF0
$1FF1
$1FF2
$1FF3
$1FF4
$1FF5
$1FF6
$1FF7
$1FF8
$1FF9
$1FFA
$1FFB
$1FFC
$1FFD
$1FFE
$1FFF
Note 1. Writing zero to bit 0 of $1FF0 clears the COP watchdog timer. Reading $1FF0 returns user EPROM data.
Figure 2-1. MC68HC705P6A User Mode Memory Map
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
20 Freescale Semiconductor
PORT A DATA REGISTER $0000
PORT B DATA REGISTER $0001
PORT C DATA REGISTER $0002
PORT D DATA REGISTER $0003
PORT A DATA DIRECTION REGISTER $0004
PORT B DATA DIRECTION REGISTER $0005
PORT C DATA DIRECTION REGISTER $0006
PORT D DATA DIRECTION REGISTER $0007
UNIMPLEMENTED $0008
UMIMPLEMENTED $0009
SIOP CONTROL REGISTER $000A
SIOP STATUS REGISTER $000B
SIOP DATA REGISTER $000C
RESERVED $000D
UNIMPLEMENTED $000E
EPROM/ROM
UNIMPLEMENTED $000F
UNIMPLEMENTED $0010
UNIMPLEMENTED $0011
TIMER CONTROL REGISTER $0012
TIMER STATUS REGISTER $0013
INPUT CAPTURE MSB $0015
INPUT CAPTURE LSB $0016
OUTPUT COMPARE MSB $0017
OUTPUT COMPARE LSB $0017
TIMER MSB $0018
TIMER LSB $0019
ALTERNATE COUNTER MSB $001A
ALTERNATE COUNTER LSB $001B
EPROM PROGRAMMING REGISTER $001C
A/D CONVERTER DATA REGISTER $001D
A/D CONVERTER CONTROL AND STATUS REGISTER $001E
RESERVED $001F
Figure 2-2. MC68HC705P6A I/O and Control
Registers Memory Map
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 21
Memory
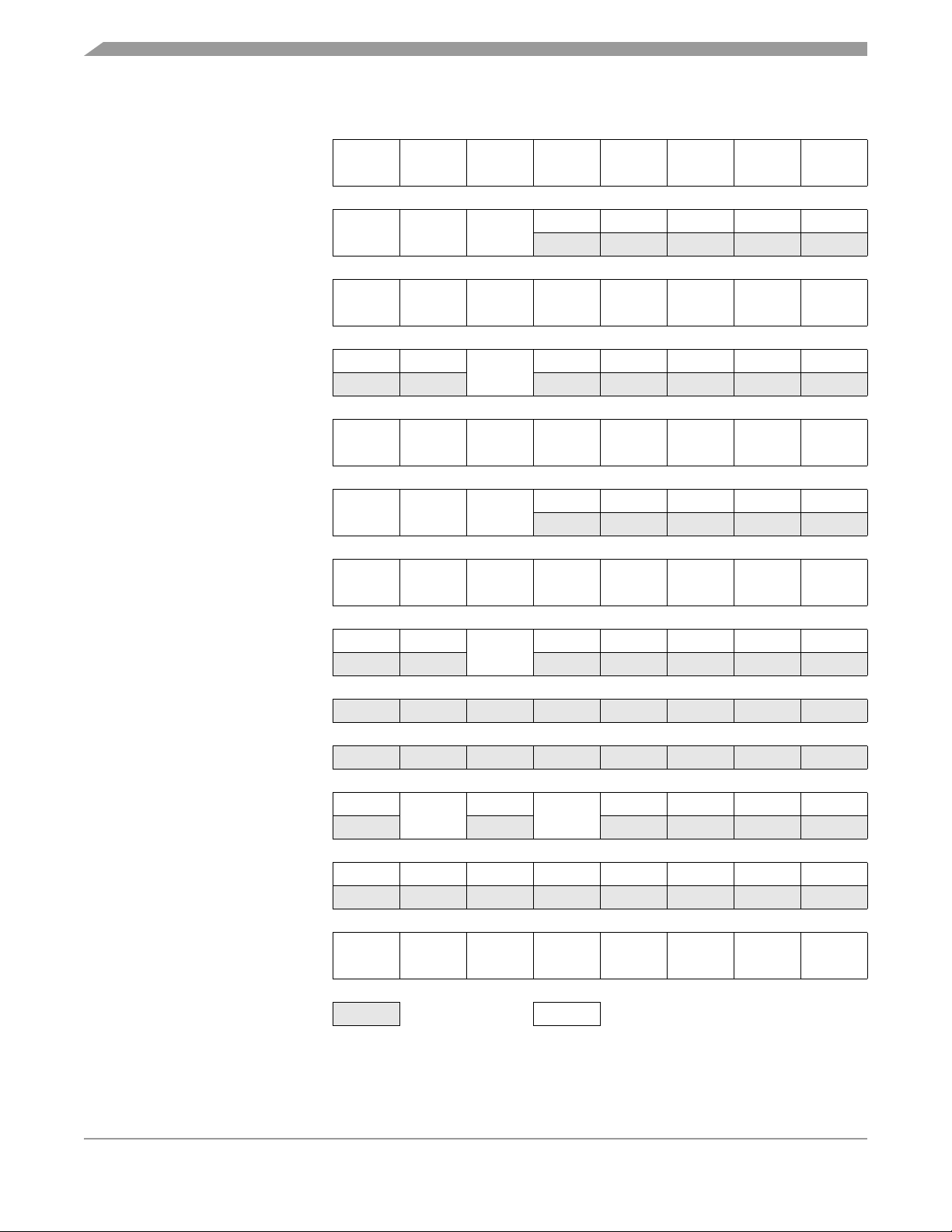
Addr. Register Name Bit 7654321Bit 0
Port A Data Register
$0000
Port B Data Register
$0001
Port C Data Register
$0002
Port D Data Register
$0003
Port A Data Direction
$0004
Port B Data Direction
$0005
Port C Data Direction
$0006
Port D Data Direction
$0007
$0008 Unimplemented
(PORTA)
See page 37.
(PORTB)
See page 38.
(PORTC)
See page 38.
(PORTD)
See page 39.
Register (DDRA)
See page 37.
Register (DDRB)
See page 38.
Register (DDRC)
See page 38.
Register (DDRD)
See page 39.
Read:
Write:
Reset: Unaffected by reset
Read:
Write:
Reset: Unaffected by reset
Read:
Write:
Reset: Unaffected by reset
Read: PD7 0
Write:
Reset: Unaffected by reset
Read:
Write:
Reset:00000000
Read:
Write:
Reset:00000000
Read:
Write:
Reset:00000000
Read: 0 0
Write:
Reset:00000000
PA7 PA6 PA5 PA4 PA3 PA2 PA1 PA0
PB7 PB6 PB5
PC7 PC6 PC5 PC4 PC3 PC2 PC1 PC0
PD5
DDRA7 DDRA6 DDRA5 DDRA4 DDRA3 DDRA2 DDRA1 DDRA0
DDRB7 DDRB6 DDRB5
DDRC7 DDRC6 DDRC5 DDRC4 DDRC3 DDRC2 DDRC1 DDRC0
DDRD5
00000
10000
11111
00000
$0009 Unimplemented
$000A
$000B
$000C
SIOP Control Register
(SCR)
See page 43.
SIOP Status Register
(SSR)
See page 44.
SIOP Data Register
(SDR)
See page 44.
Read: 0
Write:
Reset:00000000
Read:SPIFDCOL000000
Write:
Reset:00000000
Read:
Write:
Reset: Unaffected by reset
SDR7 SDR6 SDR5 SDR4 SDR3 SSDR2 SDR1 SDR0
SPE
= Unimplemented R = Reserved U = Undetermined
0
MSTR
0000
Figure 2-3. I/O and Control Register Summary (Sheet 1 of 3)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
22 Freescale Semiconductor
EPROM/ROM
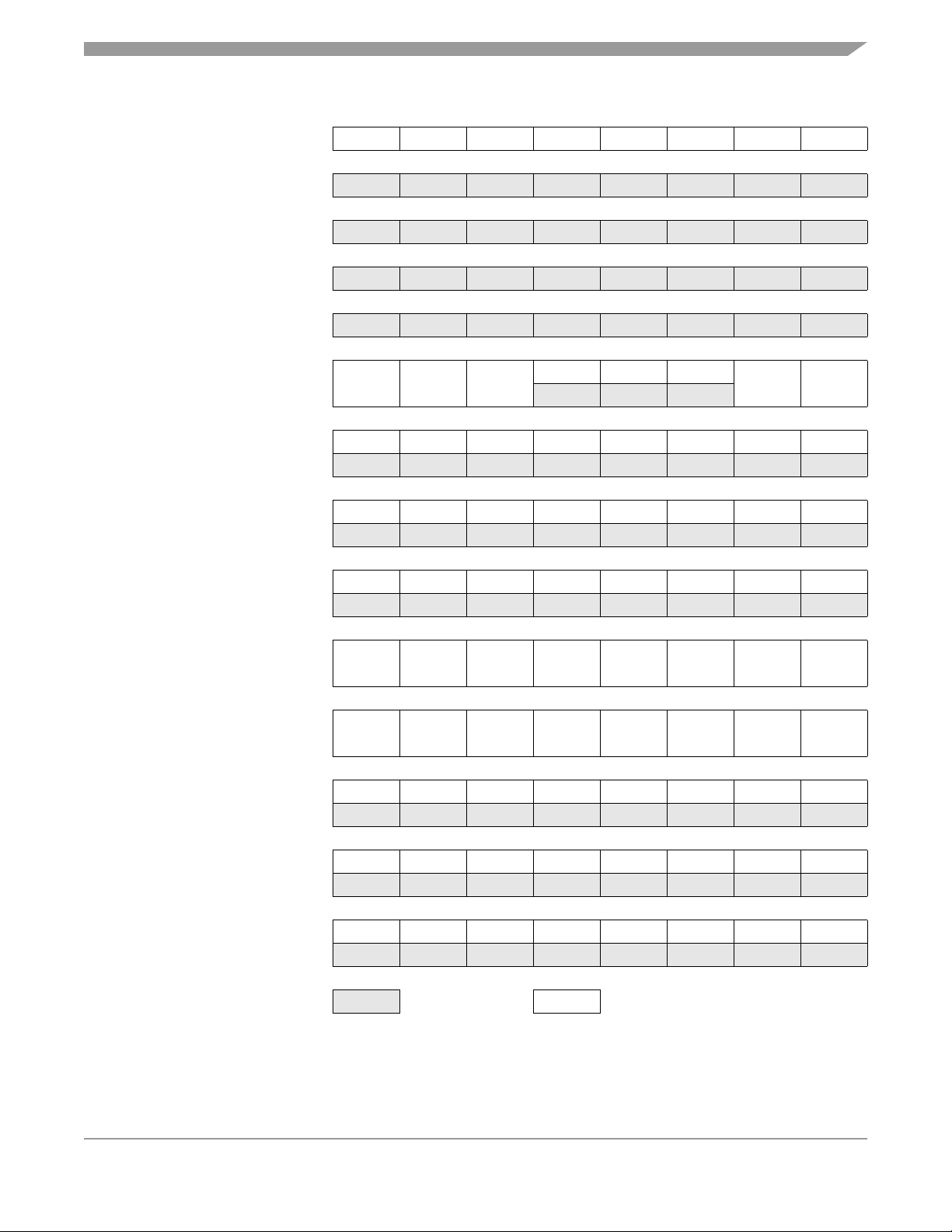
Addr. Register Name Bit 7654321Bit 0
$000DReserved for Test RRRRRRRR
$000E Unimplemented
$000F Unimplemented
$0010 Unimplemented
$0011 Unimplemented
$0012
$0013
$0014
$0015
$0016
$0017
$0018
$0019
$001A
Timer Control Register
(TCR)
See page 47.
Timer Status Register
(TSR)
See page 48.
Input Capture Register
MSB (ICRH)
See page 50.
Input Capture Register
LSB (ICRL)
See page 50.
Output Compare
Register MSB (OCRH)
See page 50.
Output Compare
Register LSB (OCRL)
See page 50.
Timer Register MSB
(TRH)
See page 49.
Timer Register LSB (TRL)
See page 49.
Alternate Timer
Register MSB (ATRH)
See page 49.
Read:
Write:
Reset:000000U0
Read:ICFOCFTOF00000
Write:
Reset:UUU00000
Read: ICRH7 ICRH6 ICRH5 ICRH4 ICRH3 ICRH2 ICRH1 ICRH0
Write:
Reset: Unaffected by reset
Read: ICRL7 ICRL6 ICRL5 ICRL4 ICRL3 ICRL2 ICRL1 ICRL0
Write:
Reset: Unaffected by reset
Read:
Write:
Reset: Unaffected by reset
Read:
Write:
Reset: Unaffected by reset
Read: TRH7 TRH6 TRH5 TRH4 TRH3 TRH2 TRH1 TRH0
Write:
Reset:11111111
Read: TRL7 TRL6 TRL5 TRL4 TRL3 TRL2 TRL1 TRL0
Write:
Reset:11111100
Read: ACRH7 ACRH6 ACRH5 ACRH4 ACRH3 ACRH2 ACRH1 ACRH0
Write:
Reset:11111111
ICIE OCIE TOIE
OCRH7 OCRH6 OCRH5 OCRH4 OCRH3 OCRH2 OCRH1 OCRH0
OCRL7 OCRL6 OCRL5 OCRL4 OCRL3 OCRL2 OCRL1 OCRL0
= Unimplemented R = Reserved U = Undetermined
000
IEDG OLVL
Figure 2-3. I/O and Control Register Summary (Sheet 2 of 3)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 23
Memory
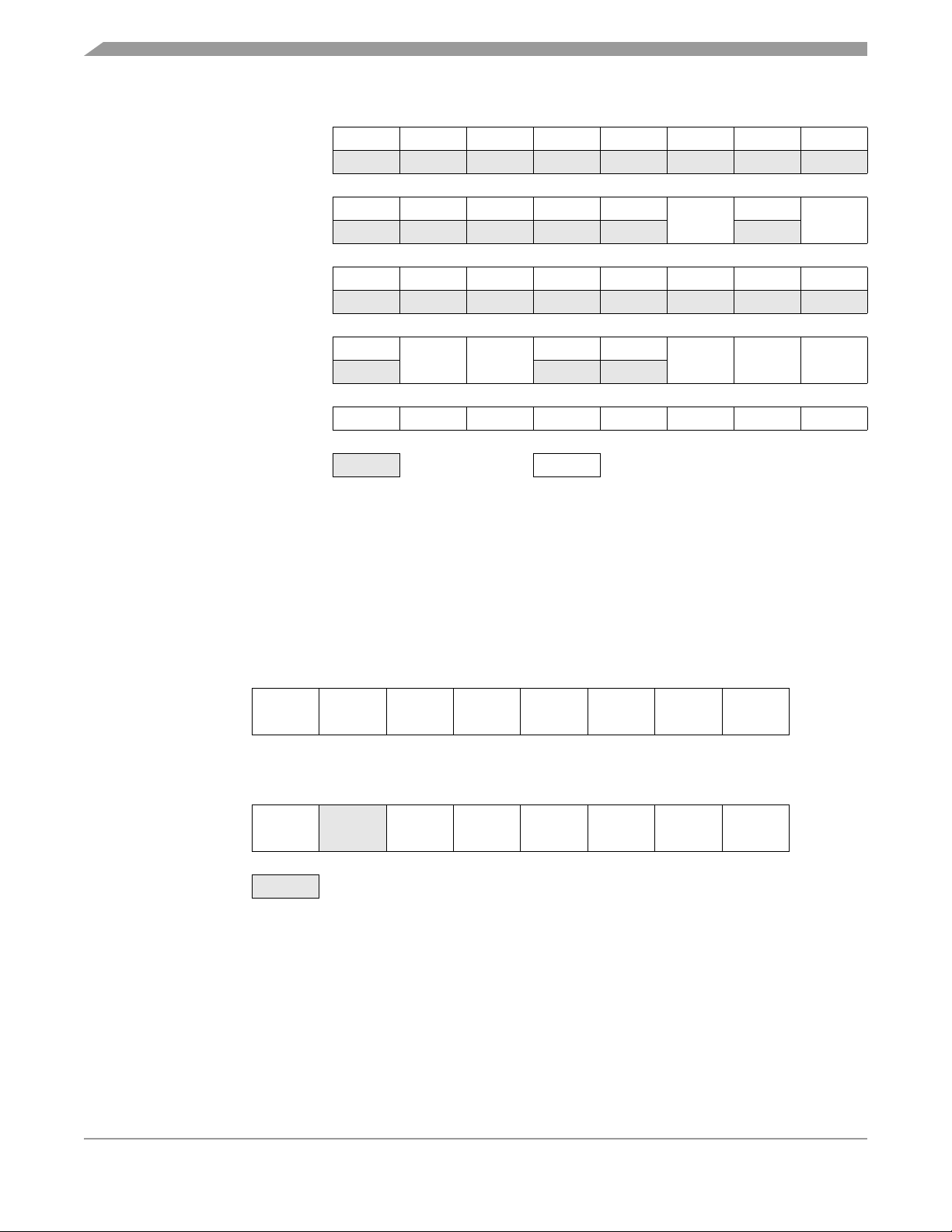
Addr. Register Name Bit 7654321Bit 0
Alternate Timer
$001B
$001C
$001D
$001E
$001FReserved for Test RRRRRRRR
Register LSB (ATRL)
See page 49.
EPROM Programming
Register (EPROG)
See page 58.
A/D Conversion Value
Data Register (ADC)
See page 55.
A/D Status and Control
Register (ADSC)
See page 54.
Read: ACRL7 ACRL6 ACRL5 ACRL4 ACRL3 ACRL2 ACRL1 ACRL0
Write:
Reset:11111100
Read:00000
Write:
Reset:00000000
Read: AD7 AD6 AD5 AD4 AD3 AD2 AD1 AD0
Write:
Reset: Unaffected by reset
Read: CC
Write:
Reset:00000000
ADRC ADON
= Unimplemented R = Reserved U = Undetermined
00
ELAT
CH2 CH1 CH0
0
EPGM
Figure 2-3. I/O and Control Register Summary (Sheet 3 of 3)
2.7 Mask Option Register
The mask option register (MOR) is a pair of EPROM bytes located at $1EFF and $1F00. It controls the
programmable options on the MC68HC705P6A. See Chapter 11 Mask Option Register (MOR) for
additional information.
$1EFFBit 7654321Bit 0
Read:
Write:
Erased State:00000000
$1F00Bit 7654321Bit 0
Read:
Write:
Erased State:00000000
PA7PU PA6PU PA5PU PA4PU PA3PU PA2PU PA1PU PA0PU
SECURE SWAIT SPR1 SPR0 LSBF LEVEL COP
= Unimplemented
Figure 2-4. Mask Option Register (MOR)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
24 Freescale Semiconductor
Computer Operating Properly (COP) Clear Register
2.8 Computer Operating Properly (COP) Clear Register
The computer operating properly (COP) watchdog timer is located at address $1FF0. Writing a logical 0
to bit zero of this location will clear the COP watchdog counter as described in 4.3.2 Computer Operating
Properly (COP) Reset.
$1FF0Bit 7654321Bit 0
Read:00000000
Write:
Reset:00000000
= Unimplemented
Figure 2-5. COP Watchdog Timer Location
COPR
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 25

Memory
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
26 Freescale Semiconductor
Chapter 3
Operating Modes
3.1 Introduction
The MC68HC705P6A has two modes of operation that affect the pinout and architecture of the MCU:
user mode and bootloader mode. The user mode is normally used for the application and the bootloader
mode is used for programming the EPROM. The conditions required to enter each mode are shown in
Table 3-1. The mode of operation is determined by the voltages on the IRQ
the rising edge of the external RESET
pin.
Table 3-1. Operating Mode Conditions After Reset
/V
V
IRQ
SS
to V
PP
DD
PD7/TCAP Mode
VSS to V
DD
RESET Pin
/VPP and PD7/TCAP pins on
Single chip
V
PP
V
DD
Bootloader
The mode of operation is also determined whenever the internal computer operating properly (COP)
watchdog timer resets the MCU. When the COP timer expires, the voltage applied to the IRQ
/VPP pin
controls the mode of operation while the voltage applied to PD7/TCAP is ignored. The voltage applied to
PD7/TCAP during the last rising edge on RESET
is stored in a latch and used to determine the mode of
operation when the COP watchdog timer resets the MCU.
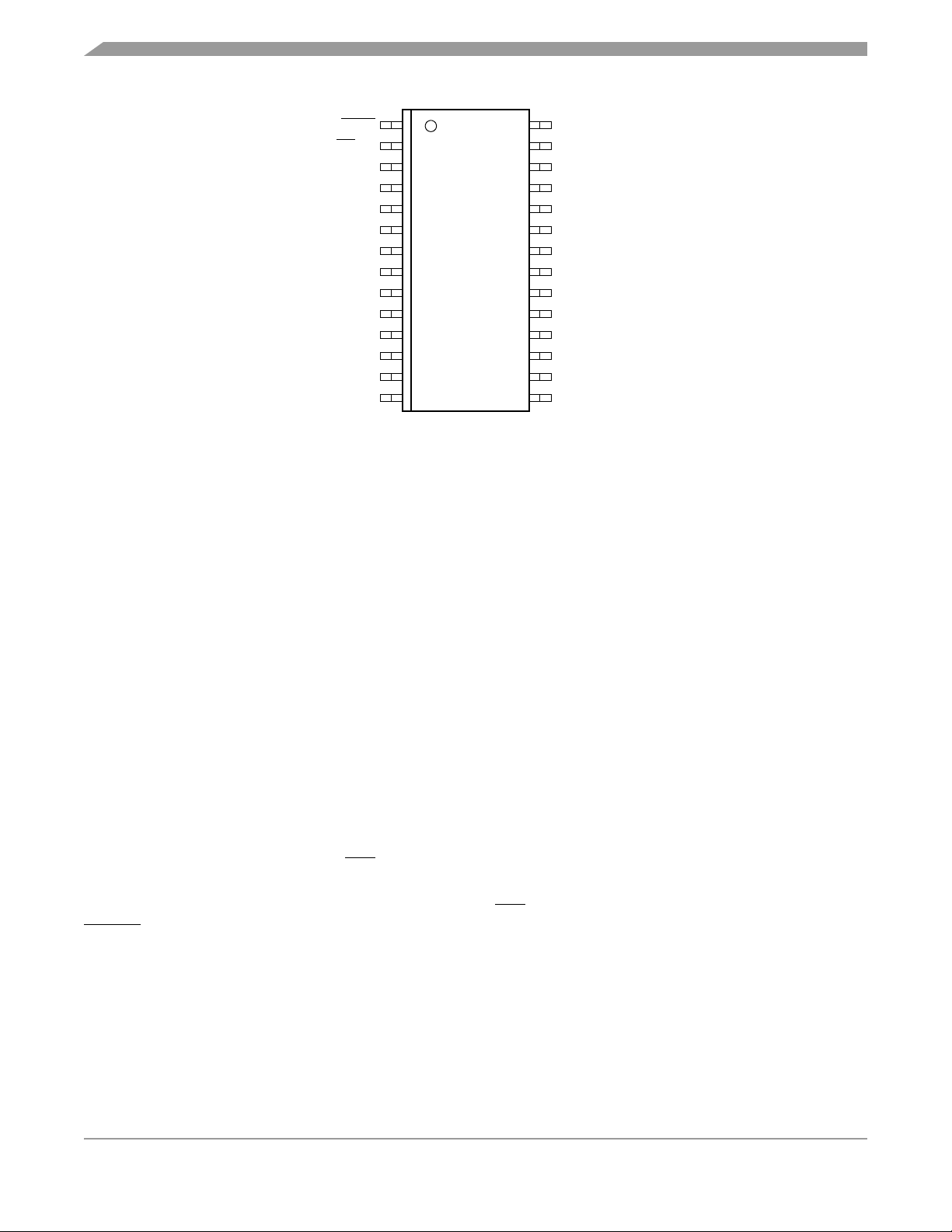
3.2 User Mode
The user mode allows the MCU to function as a self-contained microcontroller, with maximum use of the
pins for on-chip peripheral functions. All address and data activity occurs within the MCU and are not
available externally. User mode is entered on the rising edge of RESET
if the IRQ/VPP pin is within the
normal operating voltage range. The pinout for the user mode is shown in Figure 3-1.
In the user mode, there is an 8-bit I/O port, a second 8-bit I/O port shared with the analog-to-digital (A/D)
subsystem, one 3-bit I/O port shared with the serial input/output port (SIOP), and a 3-bit port shared with
the 16-bit timer subsystem, which includes one general-purpose I/O pin.
3.3 Bootloader Mode
The bootloader mode provides a means to program the user EPROM from an external memory device or
host computer. This mode is entered on the rising edge of RESET
V
is applied to the PD7/TCAP pin. The user code in the external memory device must have data located
DD
if VPP is applied to the IRQ/V
in the same address space it will occupy in the internal MCU EPROM, including the mask option register
(MOR) at $1EFF and $1F00.
pin and
PP
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 27
Operating Modes
RESET
IRQ/V
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
SDO/PB5
SDI/PB6
SCK/PB7
V
1
PP
SS
2
3
4
5
6
7
8
9
10
11
12
13
14
28
V
DD
27
OSC1
26
OSC2
25
PD7/TCAP
24
TCMP
23
PD5
22
PC0
21
PC1
20
PC2
19
PC3/AD3
18
PC4/AD2
17
PC5/AD1
16
PC6/AD0
15
PC7/V
REFH
Figure 3-1. User Mode Pinout
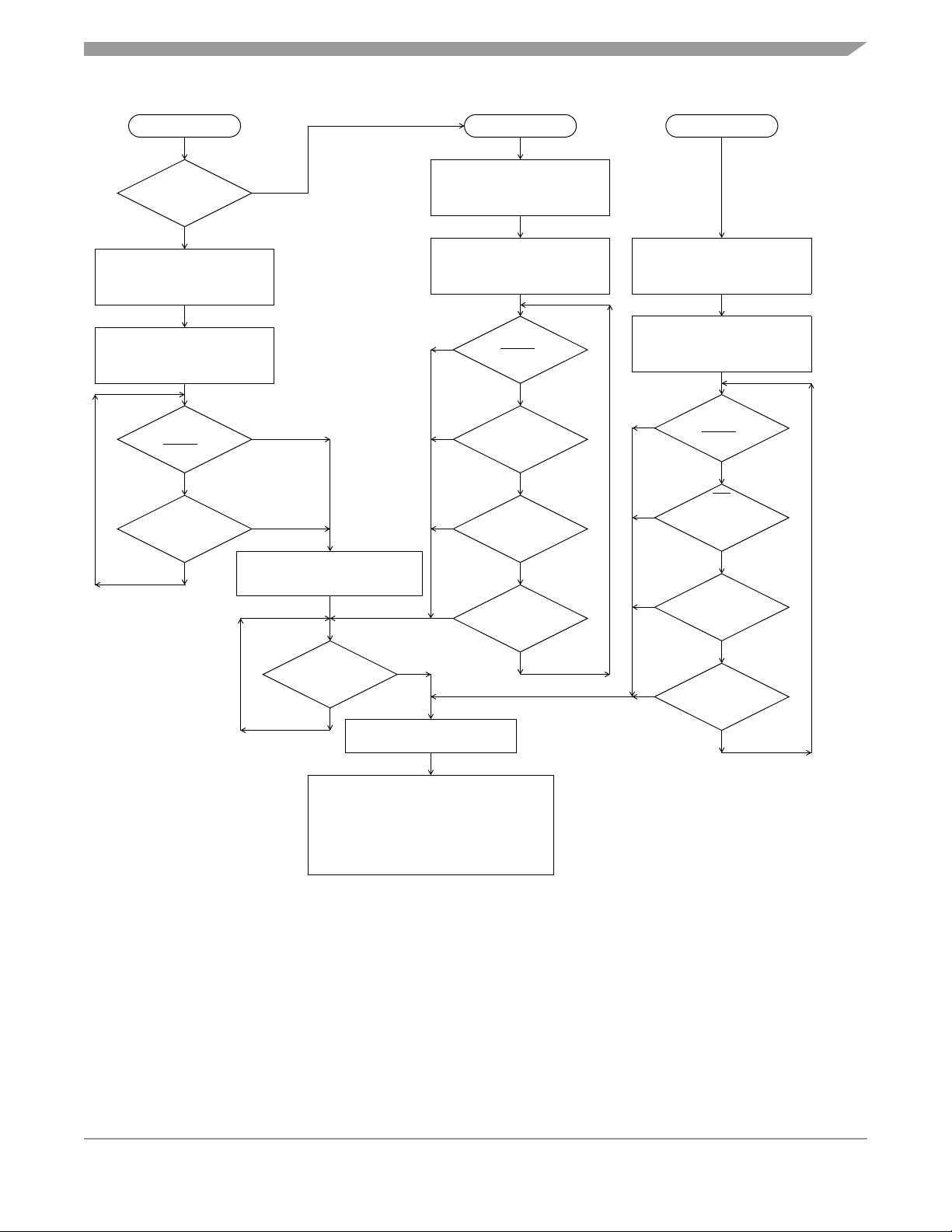
3.4 Low-Power Modes
The MC68HC705P6A is capable of running in a low-power mode in each of its configurations. The WAIT
and STOP instructions provide three modes that reduce the power required for the MCU by stopping
various internal clocks and/or the on-chip oscillator. The SWAIT bit in the MOR is used to modify the
behavior of the STOP instruction from stop mode to halt mode. The flow of the stop, halt, and wait modes
is shown in Figure 3-2.
3.4.1 STOP Instruction
The STOP instruction can result in one of two modes of operation depending on the state of the SWAIT
bit in the MOR. If the SWAIT bit is clear, the STOP instruction will behave like a normal STOP instruction
in the M68HC05 Family and place the MCU in stop mode. If the SWAIT bit in the MOR is set, the STOP
instruction will behave like a WAIT instruction (with the exception of a brief delay at startup) and place the
MCU in halt mode.
3.4.1.1 Stop Mode
Execution of the STOP instruction when the SWAIT bit in the MOR is clear places the MCU in its lowest
power consumption mode. In stop mode, the internal oscillator is turned off, halting all internal processing,
including the COP watchdog timer. Execution of the STOP instruction automatically clears the I bit in the
condition code register so that the IRQ
remain unaltered. All input/output lines remain unchanged.
The MCU can be brought out of stop mode only by an IRQ
RESET
. When exiting stop mode, the internal oscillator will resume after a 4064 internal clock cycle
oscillator stabilization delay.
Execution of the STOP instruction when the SWAIT bit in the MOR is clear
will cause the oscillator to stop, and, therefore, disable the COP watchdog
timer. To avoid turning off the COP watchdog timer, stop mode should be
changed to halt mode by setting the SWAIT bit in the MOR. See 3.5 COP
Watchdog Timer Considerations for additional information.
external interrupt is enabled. All other registers and memory
external interrupt or an externally generated
NOTE
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
28 Freescale Semiconductor
Low-Power Modes
STOP
MOR
SWAIT
BIT SET?
N
STOP EXTERNAL OSCILLATOR,
STOP INTERNAL TIMER CLOCK,
RESET STARTUP DELAY
STOP INTERNAL
PROCESSOR CLOCK,
CLEAR I BIT IN CCR
EXTERNAL
RESET
?
N
IRQ
EXTERNAL
INTERRUPT?
N
Y
Y
Y
RESTART EXTERNAL OSCILLATOR,
START STABILIZATION DELAY
END
OF STABILIZATION
DELAY?
N
INTERNAL PROCESSOR CLOCK
Y
RESTART
HALT
EXTERNAL OSCILLATOR ACTIVE
INTERNAL TIMER CLOCK ACTIVE
Y
Y
Y
Y
AND
STOP INTERNAL
PROCESSOR CLOCK,
CLEAR I BIT IN CCR
EXTERNAL
RESET
?
N
IRQ
EXTERNAL
INTERRUPT?
N
TIMER
INTERNAL
INTERRUPT?
N
COP
INTERNAL
RESET?
N
WAIT
EXTERNAL OSCILLATOR ACTIVE
INTERNAL TIMER CLOCK ACTIVE
Y
Y
Y
Y
AND
STOP INTERNAL
PROCESSOR CLOCK,
CLEAR I BIT IN CCR
EXTERNAL
RESET
?
N
IRQ
EXTERNAL
INTERRUPT?
N
TIMER
INTERNAL
INTERRUPT?
N
COP
INTERNAL
RESET?
N
1. FETCH RESET VECTOR
2. SERVICE INTERRUPT
OR
A. STACK
B. SET I BIT
C. VECTOR TO INTERRUPT ROUTINE
Figure 3-2. STOP/WAIT Flowcharts
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 29

Operating Modes
3.4.1.2 Halt Mode
NOTE
Halt mode is NOT designed for intentional use. Halt mode is only provided
to keep the COP watchdog timer active in the event a STOP instruction is
executed inadvertently. This mode of operation is usually achieved by
invoking wait mode.
Execution of the STOP instruction when the SWAIT bit in the MOR is set places the MCU in this low-power
mode. Halt mode consumes the same amount of power as wait mode (both halt and wait modes consume
more power than stop mode).
In halt mode, the internal clock is halted, suspending all processor and internal bus activity. Internal timer
clocks remain active, permitting interrupts to be generated from the 16-bit timer or a reset to be generated
from the COP watchdog timer. Execution of the STOP instruction automatically clears the I bit in the
condition code register, enabling the IRQ
external interrupt. All other registers, memory, and input/output
lines remain in their previous states.
If the 16-bit timer interrupt is enabled, it will cause the processor to exit the halt mode and resume normal
operation. The halt mode also can be exited when an IRQ
external interrupt or external RESET occurs.
When exiting the halt mode, the internal clock will resume after a delay of one to 4064 internal clock
cycles. This varied delay time is the result of the halt mode exit circuitry testing the oscillator stabilization
delay timer (a feature of the stop mode), which has been free-running (a feature of the wait mode).
3.4.2 WAIT Instruction
The WAIT instruction places the MCU in a low-power mode which consumes more power than stop mode.
In wait mode, the internal clock is halted, suspending all processor and internal bus activity. Internal timer
clocks remain active, permitting interrupts to be generated from the 16-bit timer and reset to be generated
from the COP watchdog timer. Execution of the WAIT instruction automatically clears the I bit in the
condition code register, enabling the IRQ
external interrupt. All other registers, memory, and input/output
lines remain in their previous state.
If the 16-bit timer interrupt is enabled, it will cause the processor to exit wait mode and resume normal
operation. The 16-bit timer may be used to generate a periodic exit from wait mode. Wait mode may also
be exited when an IRQ
external interrupt or RESET occurs.
3.5 COP Watchdog Timer Considerations
The COP watchdog timer is active in user mode of operation when the COP bit in the MOR is set.
Executing the STOP instruction when the SWAIT bit in the MOR is clear will cause the COP to be
disabled. Therefore, it is recommended that the STOP instruction be modified to produce halt mode (set
bit SWAIT in the MOR) if the COP watchdog timer is required to function at all times.
Furthermore, it is recommended that the COP watchdog timer be disabled for applications that will use
the wait mode for time periods that will exceed the COP timeout period.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
30 Freescale Semiconductor

Chapter 4
Resets
4.1 Introduction
The MCU can be reset from three sources: one external input and two internal reset conditions. The
RESET
reset by the RST signal which is the logical OR of internal reset functions and is clocked by PH1.
pin is a Schmitt trigger input as shown in Figure 4-1. The CPU and all peripheral modules will be
RESET
V
OSC
DATA
ADDRESS
POWER-ON
DD
RESET
(POR)
COP
WATCHDOG
(COPR)
RES
DFF
PH1
D
RST
TO CPU AND
PERIPHERALS
Figure 4-1. Reset Block Diagram
4.2 External Reset (RESET)
The RESET input is the only external reset and is connected to an internal Schmitt trigger. The external
reset occurs whenever the RESET
RESET
pin rises above the upper threshold. The upper and lower thresholds are given in Chapter 14
input is driven below the lower threshold and remains in reset until the
Electrical Specifications.
4.3 Internal Resets
The two internally generated resets are the initial power-on reset (POR) function and the computer
operating properly (COP) watchdog timer function.
4.3.1 Power-On Reset (POR)
The internal POR is generated at power-up to allow the clock oscillator to stabilize. The POR is strictly for
power turn-on conditions and should not be used to detect a drop in the power supply voltage. There is a
4064 internal clock cycle oscillator stabilization delay after the oscillator becomes active.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 31

Resets
The POR will generate the RST signal and reset the MCU. If any other reset function is active at the end
of this 4064 internal clock cycle delay, the RST signal will remain active until the other reset condition(s)
end.
4.3.2 Computer Operating Properly (COP) Reset
When the COP watchdog timer is enabled (COP bit in the MOR is set), the internal COP reset is
generated automatically by a timeout of the COP watchdog timer. This timer is implemented with an
18-stage ripple counter that provides a timeout period of 65.5 ms when a 4-MHz oscillator is used. The
COP watchdog counter is cleared by writing a logical 0 to bit zero at location $1FF0.
The COP watchdog timer can be disabled by clearing the COP bit in the MOR or by applying 2 x V
the IRQ
operating voltage range (between V
/VPP pin (for example, during bootloader). When the IRQ/VPP pin is returned to its normal
SS–VDD
), the COP watchdog timer’s output will be restored if the COP
DD
to
bit in the mask option register (MOR) is set.
The COP register is shared with the least significant byte (LSB) of an unused vector address as shown
in Figure 4-2. Reading this location will return the programmed value of the unused user interrupt vector,
usually 0. Writing to this location will clear the COP watchdog timer.
Address: $1FF0
Bit 7654321Bit 0
Read:00000000
Write:
= Unimplemented
COPR
Figure 4-2. Unused Vector and COP Watchdog Timer
When the COP watchdog timer expires, it will generate the RST signal and reset the MCU. If any other
reset function is active at the end of the COP reset signal, the RST signal will remain in the reset condition
until the other reset condition(s) end. When the reset condition ends, the MCU’s operating mode will be
selected (see Table 3-1. Operating Mode Conditions After Reset).
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
32 Freescale Semiconductor

Chapter 5
Interrupts
5.1 Introduction
The MCU can be interrupted six different ways:
1. Non-maskable software interrupt instruction (SWI)
2. External asynchronous interrupt (IRQ
3. Input capture interrupt (TIMER)
4. Output compare interrupt (TIMER)
5. Timer overflow interrupt (TIMER)
6. Port A interrupt (if selected via mask option register)
Interrupts cause the processor to save the register contents on the stack and to set the interrupt mask (I
bit) to prevent additional interrupts. Unlike reset, hardware interrupts do not cause the current instruction
execution to be halted, but are considered pending until the current instruction is completed.
When the current instruction is completed, the processor checks all pending hardware interrupts. If
interrupts are not masked (I bit in the condition code register is clear) and the corresponding interrupt
enable bit is set, the processor proceeds with interrupt processing. Otherwise, the next instruction is
fetched and executed. The SWI is executed the same as any other instruction, regardless of the I-bit state.
)
When an interrupt is to be processed, the CPU puts the register contents on the stack, sets the I bit in the
CCR, and fetches the address of the corresponding interrupt service routine from the vector table at
locations $1FF8 through $1FFF. If more than one interrupt is pending when the interrupt vector is fetched,
the interrupt with the highest vector location shown in Table 5-1 will be serviced first.
Table 5-1. Vector Addresses for Interrupts and Reset
Register
N/A N/A Reset RESET $1FFE–$1FFF
N/A N/A Software SWI $1FFC–$1FFD
N/A N/A External Interrupt IRQ $1FFA–$1FFB
TSR ICF Timer Input Capture TIMER $1FF8–$1FF9
TSR OCF Timer Output Compare TIMER $1FF8–$1FF9
TSR TOF Timer Overflow TIMER $1FF8–$1FF9
Flag
Name
Interrupts
CPU
Interrupt
Vector
Address
An RTI instruction is used to signify when the interrupt software service routine is completed. The RTI
instruction causes the CPU state to be recovered from the stack and normal processing to resume at the
next instruction that was to be executed when the interrupt took place. Figure 5-1 shows the sequence of
events that occurs during interrupt processing.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 33

Interrupts
FROM RESET
Y
IS I BIT
SET?
N
IRQ
INTERRUPT?
N
TIMER
INTERRUPT?
N
FETCH NEXT
INSTRUCTION
Y
Y
CLEAR IRQ
REQUEST
LATCH
STACK
PC, X, A, CC
SET
I BIT IN CCR
LOAD PC FROM:
SWI: $1FFC, $1FFD
IRQ
: $1FFA-$1FFB
TIMER: $1FF8-$1FF9
SWI
INSTRUCTION?
N
RTI
INSTRUCTION?
N
EXECUTE INSTRUCTION
Figure 5-1. Interrupt Processing Flowchart
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Y
Y
RESTORE RESISTERS
FROM STACK
CC, A, X, PC
34 Freescale Semiconductor

Interrupt Types
5.2 Interrupt Types
The interrupts fall into three categories: reset, software, and hardware.
5.2.1 Reset Interrupt Sequence
The reset function is not in the strictest sense an interrupt; however, it is acted upon in a similar manner
as shown in Figure 5-1. A low-level input on the RESET
the program to vector to its starting address which is specified by the contents of memory locations $1FFE
and $1FFF. The I bit in the condition code register is also set. The MCU is configured to a known state
during this type of reset as previously described in Chapter 4 Resets.
5.2.2 Software Interrupt (SWI)
The SWI is an executable instruction. It is also a non-maskable interrupt since it is executed regardless
of the state of the I bit in the CCR. As with any instruction, interrupts pending during the previous
instruction will be serviced before the SWI opcode is fetched. The interrupt service routine address for the
SWI instruction is specified by the contents of memory locations $1FFC and $1FFD.
5.2.3 Hardware Interrupts
All hardware interrupts are maskable by the I bit in the CCR. If the I bit is set, all hardware interrupts
(internal and external) are disabled. Clearing the I bit enables the hardware interrupts. Four hardware
interrupts are explained in the following subsections.
pin or internally generated RST signal causes
5.2.3.1 External Interrupt (IRQ
The IRQ
falling edge of IRQ
IRQ
in the mask option register is clear (edge-sensitive only), the output of the internal edge detector flip-flop
is sampled and the input level on the IRQ
specified by the contents of memory locations $1FFA and $1FFB. If the port A interrupts are enabled by
the MOR, they generate external interrupts identically to the IRQ
5.2.3.2 Input Capture Interrupt
The input capture interrupt is generated by the 16-bit timer as described in Chapter 8 Capture/Compare
Timer. The input capture interrupt flag is located in register TSR and its corresponding enable bit can be
found in register TCR. The I bit in the CCR must be clear for the input capture interrupt to be enabled. The
interrupt service routine address is specified by the contents of memory locations $1FF8 and $1FF9.
/VPP pin drives an asynchronous interrupt to the CPU. An edge detector flip-flop is latched on the
/VPP. If either the output from the internal edge detector flip-flop or the level on the
/VPP pin is low, a request is synchronized to the CPU to generate the IRQ interrupt. If the LEVEL bit
The internal interrupt latch is cleared nine internal clock cycles after the
interrupt is recognized (immediately after location $1FFA is read).
Therefore, another external interrupt pulse could be latched during the IRQ
service routine.
Another interrupt will be serviced if the IRQ
the RTI in the service routine is executed.
)
/VPP pin is ignored. The interrupt service routine address is
/VPP pin.
NOTE
pin is still in a low state when
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 35

Interrupts
5.2.3.3 Output Compare Interrupt
The output compare interrupt is generated by a 16-bit timer as described in Chapter 8 Capture/Compare
Timer. The output compare interrupt flag is located in register TSR and its corresponding enable bit can
be found in register TCR. The I bit in the CCR must be clear for the output compare interrupt to be
enabled. The interrupt service routine address is specified by the contents of memory locations $1FF8
and $1FF9.
5.2.3.4 Timer Overflow Interrupt
The timer overflow interrupt is generated by the 16-bit timer as described in Chapter 8 Capture/Compare
Timer. The timer overflow interrupt flag is located in register TSR and its corresponding enable bit can be
found in register TCR. The I bit in the CCR must be clear for the timer overflow interrupt to be enabled.
This internal interrupt will vector to the interrupt service routine located at the address specified by the
contents of memory locations $1FF8 and $1FF9.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
36 Freescale Semiconductor
Chapter 6
Input/Output Ports
6.1 Introduction
In the user mode, 20 bidirectional I/O lines are arranged as two 8-bit I/O ports (ports A and C), one 3-bit
I/O port (port B), and one 1-bit I/O port (port D). These ports are programmable as either inputs or outputs
under software control of the data direction registers (DDRs). Port D also contains one input-only pin.
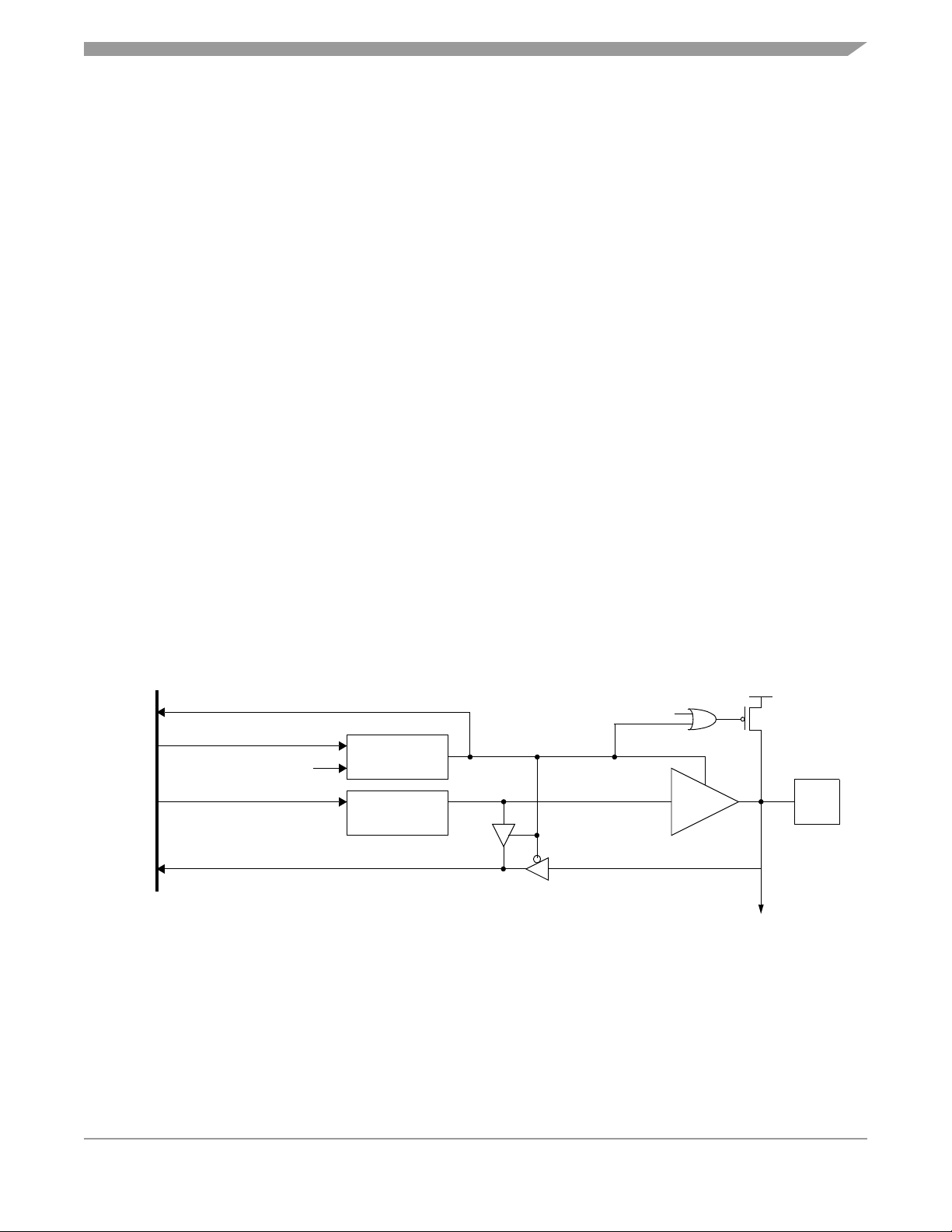
6.2 Port A
Port A is an 8-bit bidirectional port, which does not share any of its pins with other subsystems (see
Figure 6-1). The port A data register is located at address $0000 and its data direction register (DDR) is
located at address $0004. The contents of the port A data register are indeterminate at initial power up
and must be initialized by user software. Reset does not affect the data registers, but does clear the
DDRs, thereby setting all of the port pins to input mode. Writing a 1 to a DDR bit sets the corresponding
port pin to output mode. Port A has mask option register enabled interrupt capability with an internal pullup
device
NOTE
The keyscan (pullup/interrupt) feature available on port A is NOT available
in the ROM device, MC68HC05P6.
READ $0004
WRITE $0004
WRITE $0000
READ $0000
INTERNAL HC05
DATA BUS
PULLUP MASK
OPTION REGISTER
RESET
(RST)
DATA DIRECTION
REGISTER BIT
DATA
REGISTER BIT
Figure 6-1. Port A I/O and Interrupt Circuitry
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
OUTPUT
INTERRUPT SYSTEM
V
DD
TO IRQ
I/O
PIN
Freescale Semiconductor 37
Input/Output Ports
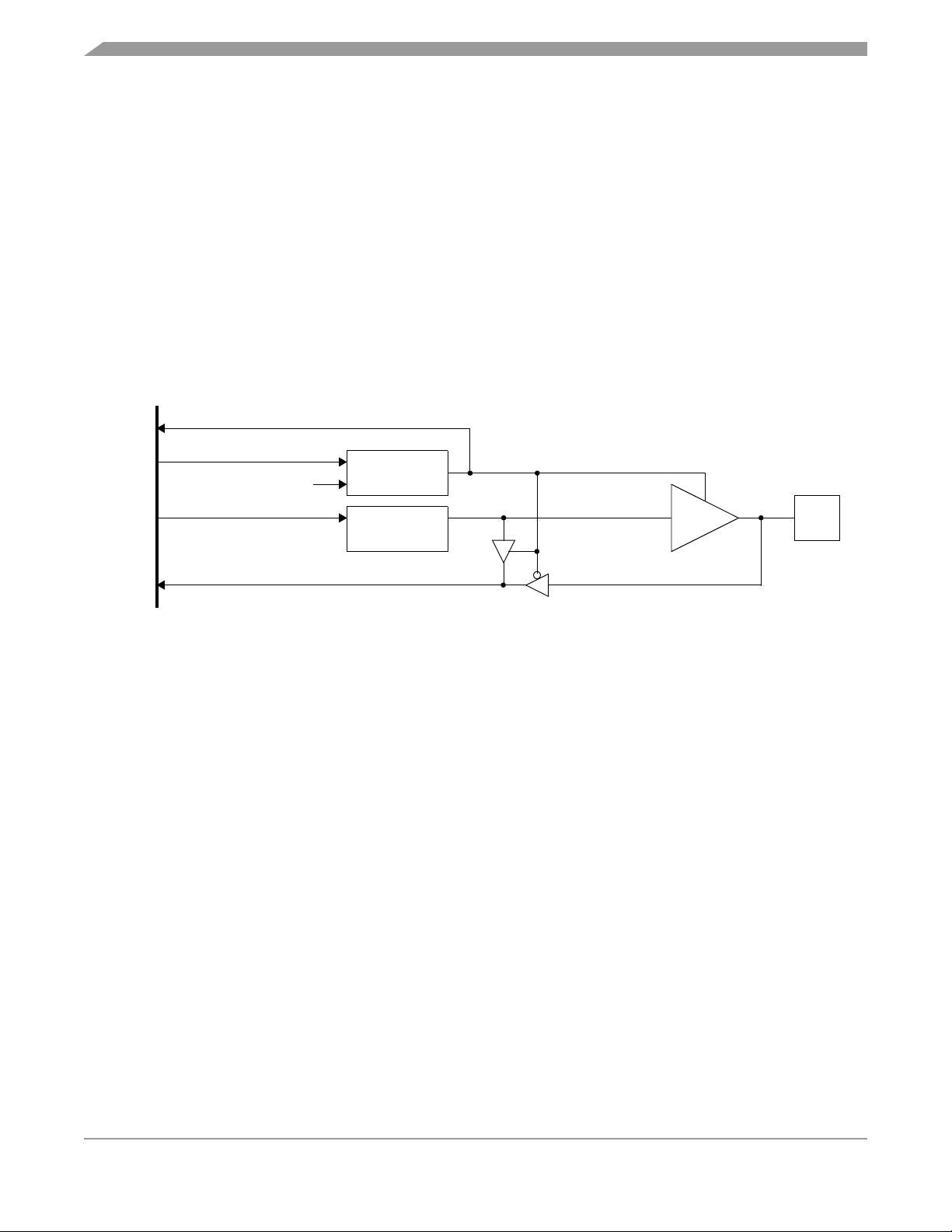
6.3 Port B
Port B is a 3-bit bidirectional port which can share pins PB5–PB7 with the SIOP communications
subsystem. The port B data register is located at address $0001 and its data direction register (DDR) is
located at address $0005. The contents of the port B data register are indeterminate at initial powerup
and must be initialized by user software. Reset does not affect the data registers, but clears the DDRs,
thereby setting all of the port pins to input mode. Writing a 1 to a DDR bit sets the corresponding port pin
to output mode (see Figure 6-2).
Port B may be used for general I/O applications when the SIOP subsystem is disabled. The SPE bit in
register SPCR is used to enable/disable the SIOP subsystem. When the SIOP subsystem is enabled, port
B registers are still accessible to software. Writing to either of the port B registers while a data transfer is
under way could corrupt the data. See Chapter 7 Serial Input/Output Port (SIOP) for a discussion of the
SIOP subsystem.
READ $0005
WRITE $0005
RESET
(RST)
WRITE $0001
READ $0001
INTERNAL HC05
DATA BUS
DATA DIRECTION
REGISTER BIT
DATA
REGISTER BIT
OUTPUT
I/O
PIN
Figure 6-2. Port B I/O Circuitry
6.4 Port C
Port C is an 8-bit bidirectional port which can share pins PC3–PC7 with the A/D subsystem. The port C
data register is located at address $0002 and its data direction register (DDR) is located at address
$0006. The contents of the port C data register are indeterminate at initial powerup and must be initialized
by user software. Reset does not affect the data registers, but clears the DDRs, thereby setting all of the
port pins to input mode. Writing a 1 to a DDR bit sets the corresponding port pin to output mode (see
Figure 6-3).
Port C may be used for general I/O applications when the A/D subsystem is disabled. The ADON bit in
register ADSC is used to enable/disable the A/D subsystem. Care must be exercised when using pins
PC0–PC2 while the A/D subsystem is enabled. Accidental changes to bits that affect pins PC3–PC7 in
the data or DDR registers will produce unpredictable results in the A/D subsystem. See Chapter 9 Analog
Subsystem.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
38 Freescale Semiconductor

READ $0006
Port D
WRITE $0006
RESET
(RST)
WRITE $0002
READ $0002
INTERNAL HC05
DATA BUS
DATA DIRECTION
REGISTER BIT
DATA
REGISTER BIT
OUTPUT
I/O
PIN
Figure 6-3. Port C I/O Circuitry
6.5 Port D
Port D is a 2-bit port with one bidirectional pin (PD5) and one input-only pin (PD7). Pin PD7 is shared with
the 16-bit timer. The port D data register is located at address $0003 and its data direction register (DDR)
is located at address $0007. The contents of the port D data register are indeterminate at initial powerup
and must be initialized by user software. Reset does not affect the data registers, but clears the DDRs,
thereby setting PD5 to input mode. Writing a 1 to DDR bit 5 sets PD5 to output mode (see Figure 6-4).
Port D may be used for general I/O applications regardless of the state of the 16-bit timer. Since PD7 is
an input-only line, its state can be read from the port D data register at any time.
READ $0007
WRITE $0007
RESET
(RST)
WRITE $0003
READ $0003
INTERNAL HC05
DATA BUS
DATA DIRECTION
REGISTER BIT
DATA
REGISTER BIT
OUTPUT
I/O
PIN
Figure 6-4. Port D I/O Circuitry
6.6 I/O Port Programming
Each pin on port A through port D (except pin 7 of port D) can be programmed as an input or an output
under software control as shown in Table 6-1, Table 6-2, Table 6-3, and Table 6-4. The direction of a pin
is determined by the state of its corresponding bit in the associated port data direction register (DDR). A
pin is configured as an output if its corresponding DDR bit is set to a logic 1. A pin is configured as an
input if its corresponding DDR bit is cleared to a logic 0.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 39

Input/Output Ports
Table 6-1. Port A I/O Functions
Accesses to
DDRA I/O Pin Mode
0 IN, Hi-Z DDRA0–DDRA7 I/O Pin See Note
1 OUT DDRA0–DDRA7 PA0–PA7 PA0–PA7
Note: Does not affect input, but stored to data register
DDRA @ $0004
Read/Write Read Write
Accesses to Data
Register @ $0000
Table 6-2. Port B I/O Functions
Accesses to
DDRB I/O Pin Mode
0 IN, Hi-Z DDRB5–DDRB7 I/O Pin See Note
1 OUT DDRB5–DDRB7 PB5–PB7 PB5–PB7
Note: Does not affect input, but stored to data register
DDRB @ $0005
Read/Write Read Write
Accesses to Data
Register @ $0001
Table 6-3. Port C I/O Functions
Accesses to
DDRC I/O Pin Mode
0 IN, Hi-Z DDRC0–DDRC7 I/O Pin See Note
1 OUT DDRC0–DDRC7 PC0–PC7 PC0–PC7
Note: Does not affect input, but stored to data register
DDRC @ $0006
Read/Write Read Write
Accesses to Data
Register @ $0002
Table 6-4. Port D I/O Functions
Accesses to
DDRD I/O Pin Mode
0 IN, Hi-Z DDRD5 I/O Pin See Note 1
1 OUT DDRD5 PD5 PD5
Notes:
1. Does not affect input, but stored to data register
2. PD7 is input only
DDRD @ $0007
Read/Write Read Write
Accesses to Data
Register @ $0003
NOTE
To avoid generating a glitch on an I/O port pin, data should be written to the
I/O port data register before writing a logic 1 to the corresponding data
direction register.
At power-on or reset, all DDRs are cleared, which configures all port pins as inputs. The DDRs are
capable of being written to or read by the processor. During the programmed output state, a read of the
data register will actually read the value of the output data latch and not the level on the I/O port pin.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
40 Freescale Semiconductor

Chapter 7
Serial Input/Output Port (SIOP)
7.1 Introduction
The simple synchronous serial I/O port (SIOP) subsystem is designed to provide efficient serial
communications between peripheral devices or other MCUs. The SIOP is implemented as a 3-wire
master/slave system with serial clock (SCK), serial data input (SDI), and serial data output (SDO). A block
diagram of the SIOP is shown in Figure 7-1. A mask programmable option determines whether the SIOP
is MSB or LSB first.
The SIOP subsystem shares its input/output pins with port B. When the SIOP is enabled (SPE bit set in
register SCR), port B DDR and data registers are modified by the SIOP. Although port B DDR and data
registers can be altered by application software, these actions could affect the transmitted or received
data.
HCO5 INTERNAL BUS
SPE
76543210
CONTROL
REGISTER
$0A
76543210
8-BIT
SHIFT
REGISTER
$0C
SDO
SDI
SCK
BAUD
RATE
GENERATOR
INTERNAL
CPU CLOCK
76543210
STATUS
REGISTER
$0B
Figure 7-1. SIOP Block Diagram
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
I/O
CONTROL
LOGIC
SDO/PB5
SDI/PB6
SCK/PB7
Freescale Semiconductor 41

Serial Input/Output Port (SIOP)
7.2 SIOP Signal Format
The SIOP subsystem is software configurable for master or slave operation. No external mode selection
inputs are available (for instance, slave select pin).
7.2.1 Serial Clock (SCK)
The state of the SCK output normally remains a logic 1 during idle periods between data transfers. The
first falling edge of SCK signals the beginning of a data transfer. At this time, the first bit of received data
may be presented at the SDI pin and the first bit of transmitted data is presented at the SDO pin (see
Figure 7-2). Data is captured at the SDI pin on the rising edge of SCK. The transfer is terminated upon
the eighth rising edge of SCK.
The master and slave modes of operation differ only by the sourcing of SCK. In master mode, SCK is
driven from an internal source within the MCU. In slave mode, SCK is driven from a source external to the
MCU. The SCK frequency is dependent upon the SPR0 and SPR1 bits located in the mask option
register. Refer to 11.2 Mask Option Register for a description of available SCK frequencies.
BIT 0 BIT 1 BIT 2 BIT 3 BIT 4 BIT 5 BIT 6 BIT 7
SDO
SCK
100 ns 100 ns
SDI
BIT 0 BIT 1 BIT 2 BIT 3 BIT 4 BIT 5 BIT 6 BIT 7
Figure 7-2. SIOP Timing Diagram
7.2.2 Serial Data Input (SDI)
The SDI pin becomes an input as soon as the SIOP subsystem is enabled. New data may be presented
to the SDI pin on the falling edge of SCK.However, valid data must be present at least 100 nanoseconds
before the rising edge of SCK and remain valid for 100 nanoseconds after the rising edge of SCK. See
Figure 7-2.
7.2.3 Serial Data Output (SDO)
The SDO pin becomes an output as soon as the SIOP subsystem is enabled. Prior to enabling the SIOP,
PB5 can be initialized to determine the beginning state. While the SIOP is enabled, PB5 cannot be used
as a standard output since that pin is connected to the last stage of the SIOP serial shift register. Mask
option register bit LSBF permits data to be transmitted in either the MSB first format or the LSB first format.
Refer to 11.2 Mask Option Register for MOR LSBF programming information.
On the first falling edge of SCK, the first data bit will be shifted out to the SDO pin. The remaining data
bits will be shifted out to the SDO pin on subsequent falling edges of SCK. The SDO pin will present valid
data at least 100 nanoseconds before the rising edge of the SCK and remain valid for 100 nanoseconds
after the rising edge of SCK. See Figure 7-2.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
42 Freescale Semiconductor

SIOP Registers
7.3 SIOP Registers
The SIOP is programmed and controlled by the SIOP control register (SCR) located at address $000A,
the SIOP status register (SSR) located at address $000B, and the SIOP data register (SDR) located at
address $000C.
7.3.1 SIOP Control Register (SCR)
This register is located at address $000A and contains two bits. Figure 7-3 shows the position of each bit
in the register and indicates the value of each bit after reset.
Address: $000A
Bit 7654321Bit 0
Read: 0
Write:
Reset:00000000
SPE
= Unimplemented
Figure 7-3. SIOP Control Register (SCR)
SPE — Serial Peripheral Enable
When set, the SPE bit enables the SIOP subsystem such that SDO/PB5 is the serial data output,
SDI/PB6 is the serial data input, and SCK/PB7 is a serial clock input in the slave mode or a serial clock
output in the master mode. Port B DDR and data registers can be manipulated as usual (except for
PB5); however, these actions could affect the transmitted or received data.
The SPE bit is readable at any time. However, writing to the SIOP control register while a transmission
is in progress will cause the SPIF and DCOL bits in the SIOP status register (see below) to operate
incorrectly. Therefore, the SIOP control register should be written once to enable the SIOP and then
not written to until the SIOP is to be disabled. Clearing the SPE bit while a transmission is in progress
will 1) abort the transmission, 2) reset the serial bit counter, and 3) convert the port B/SIOP port to a
general-purpose I/O port. Reset clears the SPE bit.
0
MSTR
0000
MSTR — Master Mode Select
When set, the MSTR bit configures the serial I/O port for master mode. A transfer is initiated by writing
to the SDR. Also, the SCK pin becomes an output providing a synchronous data clock dependent upon
the oscillator frequency. When the device is in slave mode, the SDO and SDI pins do not change
function. These pins behave exactly the same in both the master and slave modes.
The MSTR bit is readable and writeable at any time regardless of the state of the SPE bit. Clearing the
MSTR bit will abort any transfers that may have been in progress. Reset clears the MSTR bit as well
as the SPE bit, disabling the SIOP subsystem.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 43

Serial Input/Output Port (SIOP)
7.3.2 SIOP Status Register (SSR)
This register is located at address $000B and contains two bits. Figure 7-4 shows the position of each bit
in the register and indicates the value of each bit after reset.
Address: $000B
Bit 7654321Bit 0
Read:SPIFDCOL000000
Write:
Reset:00000000
= Unimplemented
Figure 7-4. SIOP Status Register (SSR)
SPIF — Serial Port Interface Flag
SPIF is a read-only status bit that is set on the last rising edge of SCK and indicates that a data transfer
has been completed. It has no effect on any future data transfers and can be ignored. The SPIF bit is
cleared by reading the SSR followed by a read or write of the SDR. If the SPIF is cleared before the
last rising edge of SCK, it will be set again on the last rising edge of SCK. Reset clears the SPIF bit.
DCOL — Data Collision
DCOL is a read-only status bit which indicates that an illegal access of the SDR has occurred. The
DCOL bit will be set when reading or writing the SDR after the first falling edge of SCK and before SPIF
is set. Reading or writing the SDR during this time will result in invalid data being transmitted or
received.
The DCOL bit is cleared by reading the SSR (when the SPIF bit is set) followed by a read or write of
the SDR. If the last part of the clearing sequence is done after another transfer has started, the DCOL
bit will be set again. Reset clears the DCOL bit.
7.3.3 SIOP Data Register (SDR)
This register is located at address $000C and serves as both the transmit and receive data register.
Writing to this register will initiate a message transmission if the SIOP is in master mode. The SIOP
subsystem is not double buffered and any write to this register will destroy the previous contents. The
SDR can be read at any time; however, if a transfer is in progress, the results may be ambiguous and the
DCOL bit will be set. Writing to the SDR while a transfer is in progress can cause invalid data to be
transmitted and/or received. Figure 7-5 shows the position of each bit in the register. This register is not
affected by reset.
Address: $000C
Bit 7654321Bit 0
Read:
Write:
Reset: Unaffected by reset
SD7 SD6 SD5 SD4 SD3 SD2 SD1 SD0
Figure 7-5. Serial Port Data Register (SDR)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
44 Freescale Semiconductor

Chapter 8
Capture/Compare Timer
8.1 Introduction
This section describes the operation of the 16-bit capture/compare timer. Figure 8-1 shows the structure
of the capture/compare subsystem.
INTERNAL BUS
INTERNAL
PROCESSOR
CLOCK
³³³
÷4
HIGH
BYTE
16-BIT FREE
RUNNING
COUNTER
COUNTER
ALTERNATE
REGISTER
8-BIT
BUFFER
LOW
BYTE
$18
$19
$1A
$1B
HIGH
BYTE
LOW
BYTE
INPUT
CAPTURE
REGISTER
$14
$15
$16
$17
HIGH
BYTE
LOW
BYTE
OUTPUT
COMPARE
REGISTER
TIMER
STATUS
REG.
OUTPUT
COMPARE
CIRCUIT
ICF OCF TOF
INTERRUPT
$13
CIRCUIT
OVERFLOW
DETECT
CIRCUIT
ICIE IEDG OLVL
TOIEOCIE
EDGE
DETECT
CIRCUIT
OUTPUT
LEVEL
REG.
TIMER
CONTROL
REG.
$12
D
CLK
C
RESET
Q
Figure 8-1. Capture/Compare Timer Block Diagram
OUTPUT
LEVEL
(TCMP)
EDGE
INPUT
(TCAP)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 45

Capture/Compare Timer
8.2 Timer Operation
The core of the capture/compare timer is a 16-bit free-running counter. The counter provides the timing
reference for the input capture and output compare functions. The input capture and output compare
functions provide a means to latch the times at which external events occur, to measure input waveforms,
and to generate output waveforms and timing delays. Software can read the value in the 16-bit
free-running counter at any time without affecting the counter sequence.
Because of the 16-bit timer architecture, the I/O registers for the input capture and output compare
functions are pairs of 8-bit registers.
Because the counter is 16 bits long and preceded by a fixed divide-by-4 prescaler, the counter rolls over
every 262,144 internal clock cycles. Timer resolution with a 4-MHz crystal is 2 µs.
8.2.1 Input Capture
The input capture function is a means to record the time at which an external event occurs. When the
input capture circuitry detects an active edge on the TCAP pin, it latches the contents of the timer registers
into the input capture registers. The polarity of the active edge is programmable.
Latching values into the input capture registers at successive edges of the same polarity measures the
period of the input signal on the TCAP pin. Latching values into the input capture registers at successive
edges of opposite polarity measures the pulse width of the signal.
8.2.2 Output Compare
The output compare function is a means of generating an output signal when the 16-bit counter reaches
a selected value. Software writes the selected value into the output compare registers. On every fourth
internal clock cycle the output compare circuitry compares the value of the counter to the value written in
the output compare registers. When a match occurs, the timer transfers the programmable output level
bit (OLVL) from the timer control register to the TCMP pin.
The programmer can use the output compare register to measure time periods, to generate timing delays,
or to generate a pulse of specific duration or a pulse train of specific frequency and duty cycle on the
TCMP pin.
8.3 Timer I/O Registers
The following I/O registers control and monitor timer operation:
• Timer control register (TCR)
• Timer status register (TSR)
• Timer registers (TRH and TRL)
• Alternate timer registers (ATRH and ATRL)
• Input capture registers (ICRH and ICRL)
• Output compare registers (OCRH and OCRL)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
46 Freescale Semiconductor

Timer I/O Registers
8.3.1 Timer Control Register
The timer control register (TCR), shown in Figure 8-2, performs these functions:
• Enables input capture interrupts
• Enables output compare interrupts
• Enables timer overflow interrupts
• Controls the active edge polarity of the TCAP signal
• Controls the active level of the TCMP output
Address: $0012
Bit 7654321Bit 0
Read:
Write:
Reset:000000U0
ICIE OCIE TOIE
= Unimplemented U = Undetermined
Figure 8-2. Timer Control Register (TCR)
ICIE — Input Capture Interrupt Enable
This read/write bit enables interrupts caused by an active signal on the TCAP pin. Resets clear the
ICIE bit.
1 = Input capture interrupts enabled
0 = Input capture interrupts disabled
000
IEDG OLVL
OCIE — Output Compare Interrupt Enable
This read/write bit enables interrupts caused by an active signal on the TCMP pin. Resets clear the
OCIE bit.
1 = Output compare interrupts enabled
0 = Output compare interrupts disabled
TOIE — Timer Overflow Interrupt Enable
This read/write bit enables interrupts caused by a timer overflow. Reset clear the TOIE bit.
1 = Timer overflow interrupts enabled
0 = Timer overflow interrupts disabled
IEDG — Input Edge
The state of this read/write bit determines whether a positive or negative transition on the TCAP pin
triggers a transfer of the contents of the timer register to the input capture register. Resets have no
effect on the IEDG bit.
1 = Positive edge (low to high transition) triggers input capture
0 = Negative edge (high to low transition) triggers input capture
OLVL — Output Level
The state of this read/write bit determines whether a logic 1 or logic 0 appears on the TCMP pin when
a successful output compare occurs. Resets clear the OLVL bit.
1 = TCMP goes high on output compare
0 = TCMP goes low on output compare
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 47

Capture/Compare Timer
8.3.2 Timer Status Register
The timer status register (TSR), shown in Figure 8-3, contains flags to signal the following conditions:
• An active signal on the TCAP pin, transferring the contents of the timer registers to the input
capture registers
• A match between the 16-bit counter and the output compare registers, transferring the OLVL bit to
the TCMP pin
• A timer roll over from $FFFF to $0000
Address: $0013
Bit 7654321Bit 0
Read:ICFOCFTOF00000
Write:
Reset:UUU00000
= Unimplemented U = Undetermined
Figure 8-3. Timer Status Register (TSR)
ICF — Input Capture Flag
The ICF bit is set automatically when an edge of the selected polarity occurs on the TCAP pin. Clear
the ICF bit by reading the timer status register with ICF set and then reading the low byte ($0015) of
the input capture registers. Resets have no effect on ICF.
OCF — Output Compare Flag
The OCF bit is set automatically when the value of the timer registers matches the contents of the
output compare registers. Clear the OCF bit by reading the timer status register with OCF set and then
reading the low byte ($0017) of the output compare registers. Resets have no effect on OCF.
TOF — Timer Overflow Flag
The TOF bit is set automatically when the 16-bit counter rolls over from $FFFF to $0000. Clear the
TOF bit by reading the timer status register with TOF set, and then reading the low byte ($0019) of the
timer registers. Resets have no effect on TOF.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
48 Freescale Semiconductor
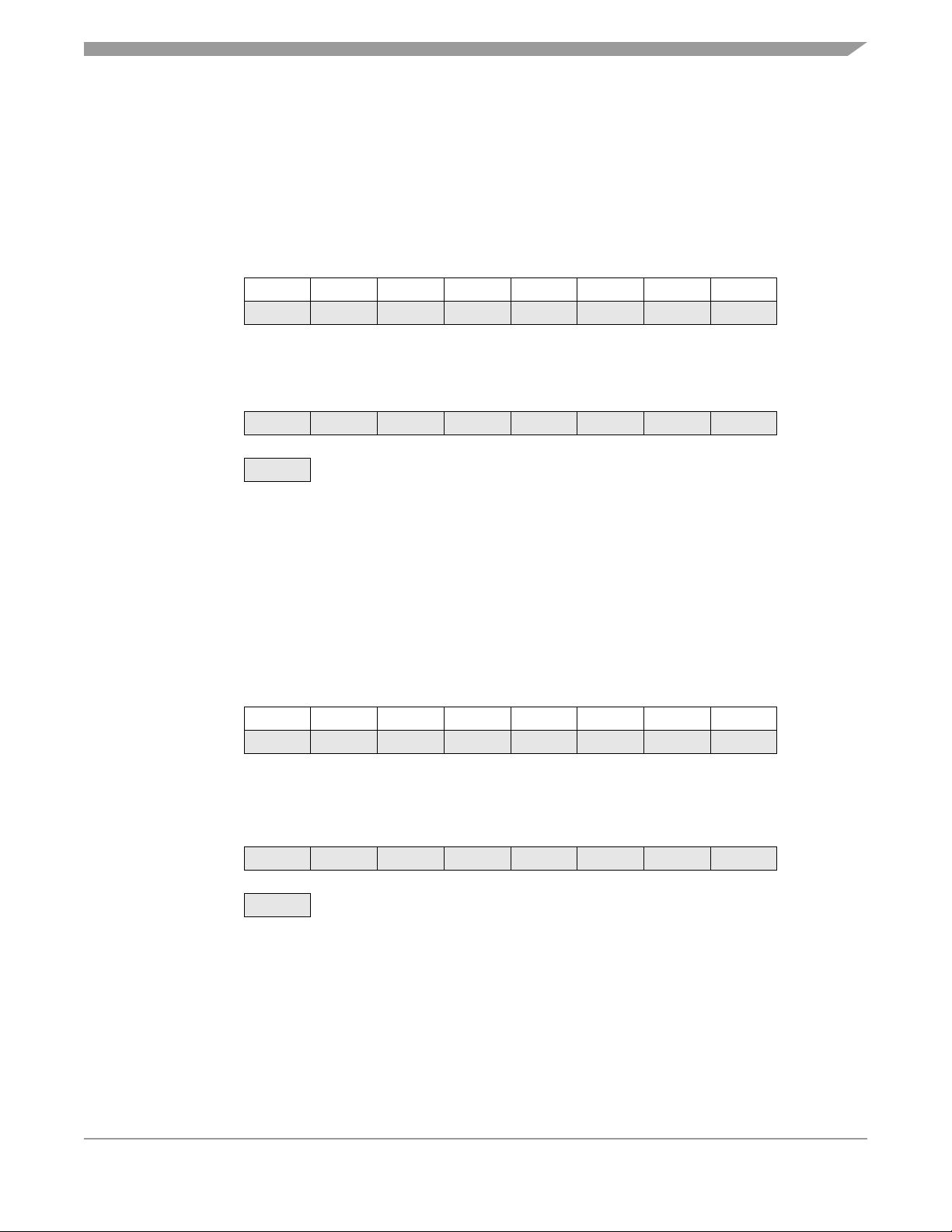
Timer I/O Registers
8.3.3 Timer Registers
The timer registers (TRH and TRL), shown in Figure 8-4, contains the current high and low bytes of the
16-bit counter. Reading TRH before reading TRL causes TRL to be latched until TRL is read. Reading
TRL after reading the timer status register clears the timer overflow flag (TOF). Writing to the timer
registers has no effect.
Address: TRH — $0018
Bit 7654321Bit 0
Read: TRH7 TRH6 TRH5 TRH4 TRH3 TRH2 TRH1 TRH0
Write
Reset:11111111
Address: TRL — $0019
Bit 7654321Bit 0
Write:
Reset:11111100
= Unimplemented
Figure 8-4. Timer Registers (TRH and TRL)
8.3.4 Alternate Timer Registers
The alternate timer registers (ATRH and ATRL), shown in Figure 8-5, contain the current high and low
bytes of the 16-bit counter. Reading ATRH before reading ATRL causes ATRL to be latched until ATRL
is read. Reading ATRL has no effect on the timer overflow flag (TOF). Writing to the alternate timer
registers has no effect.
Address: ATRH — $001A
Bit 7654321Bit 0
Read: ACRH7 ACRH6 ACRH5 ACRH4 ACRH3 ACRH2 ACRH1 ACRH0
Write:
Reset:11111111
Address: ATRL — $001B
Bit 7654321Bit 0
Write:
Reset:11111100
= Unimplemented
Figure 8-5. Alternate Timer Registers (ATRH and ATRL)
NOTE
To prevent interrupts from occurring between readings of ATRH and ATRL,
set the interrupt flag in the condition code register before reading ATRH,
and clear the flag after reading ATRL.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 49

Capture/Compare Timer
8.3.5 Input Capture Registers
When a selected edge occurs on the TCAP pin, the current high and low bytes of the 16-bit counter are
latched into the input capture registers. Reading ICRH before reading ICRL inhibits further capture until
ICRL is read. Reading ICRL after reading the status register clears the input capture flag (ICF). Writing to
the input capture registers has no effect.
Address: ICRH — $0014
Bit 7654321Bit 0
Read: ICRH7 ICRH6 ICRH5 ICRH4 ICRH3 ICRH2 ICRH1 ICRH0
Write:
Unaffected by reset
Address: ICRL — $0015
Bit 7654321Bit 0
Write:
Unaffected by reset
= Unimplemented
Figure 8-6. Input Capture Registers (ICRH and ICRL)
NOTE
To prevent interrupts from occurring between readings of ICRH and ICRL,
set the interrupt flag in the condition code register before reading ICRH, and
clear the flag after reading ICRL.
8.3.6 Output Compare Registers
When the value of the 16-bit counter matches the value in the output compare registers, the planned
TCMP pin action takes place. Writing to OCRH before writing to OCRL inhibits timer compares until OCRL
is written. Reading or writing to OCRL after the timer status register clears the output compare flag (OCF).
Address: OCRH — $0016
Bit 7654321Bit 0
Write:
Read:
Address: OCRL — $0017
Read:
OCRH7 OCRH6 OCRH5 OCRH4 OCRH3 OCRH2 OCRH1 OCRH0
Unaffected by reset
Bit 7654321Bit 0
Unaffected by reset
Figure 8-7. Output Compare Registers (OCRH and OCRL)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
50 Freescale Semiconductor

Timer During Wait/Halt Mode
To prevent OCF from being set between the time it is read and the time the output compare registers are
updated, use this procedure:
1. Disable interrupts by setting the I bit in the condition code register.
2. Write to OCRH. Compares are now inhibited until OCRL is written.
3. Clear bit OCF by reading timer status register (TSR).
4. Enable the output compare function by writing to OCRL.
5. Enable interrupts by clearing the I bit in the condition code register.
8.4 Timer During Wait/Halt Mode
The CPU clock halts during the wait (or halt) mode, but the timer remains active. If interrupts are enabled,
a timer interrupt will cause the processor to exit the wait mode.
8.5 Timer During Stop Mode
In the stop mode, the timer stops counting and holds the last count value if STOP is exited by an interrupt.
If STOP is exited by RESET, the counters are forced to $FFFC. During STOP, if at least one valid input
capture edge occurs at the TCAP pins, the input capture detect circuit is armed. This does not set any
timer flags or wake up the MCU, but if an interrupt is used to exit stop mode, there is an active input
capture flag and data from the first valid edge that occurred during the stop mode. If reset is used to exit
stop mode, then no input capture flag or data remains, even if a valid input capture edge occurred.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 51

Capture/Compare Timer
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
52 Freescale Semiconductor
Chapter 9
Analog Subsystem
9.1 Introduction
The MC68HC705P6A includes a 4-channel, multiplexed input, 8-bit, successive approximation
analog-to-digital (A/D) converter. The A/D subsystem shares its inputs with port C pins PC3–PC7.
9.2 Analog Section
The following paragraphs describe the operation and performance of analog modules within the analog
subsystem.
9.2.1 Ratiometric Conversion
The A/D converter is ratiometric, with pin V
voltage equal to V
to V
no overflow indication. For ratiometric conversions, V
voltage being used by the analog signal being measured and referenced to V
produces a conversion result of $00. An input voltage greater than V
SS
9.2.2 Reference Voltage (V
The reference supply for the A/D converter shares pin PC7 with port C. The low reference is tied to the
pin internally. V
V
SS
conversions is tested and guaranteed only for V
produces a conversion result of $FF (full scale). Applying an input voltage equal
REFH
)
REFH
can be any voltage between VSS and VDD; however, the accuracy of
REFH
supplying the high reference voltage. Applying an input
REFH
will convert to $FF with
REFH
should be at the same potential as the supply
REFH
.
SS
= VDD.
REFH
9.2.3 Accuracy and Precision
The 8-bit conversion result is accurate to within ±1 1/2 LSB, including quantization; however, the accuracy
of conversions is tested and guaranteed only with external oscillator operation.
9.3 Conversion Process
The A/D reference inputs are applied to a precision digital-to-analog converter. Control logic drives the
D/A and the analog output is successively compared to the selected analog input which was sampled at
the beginning of the conversion cycle. The conversion process is monotonic and has no missing codes.
9.4 Digital Section
The following paragraphs describe the operation and performance of digital modules within the analog
subsystem.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 53
Analog Subsystem
9.4.1 Conversion Times
Each input conversion requires 32 internal clock cycles, which must be at a frequency equal to or greater
than 1 MHz.
9.4.2 Internal versus External Oscillator
If the internal clock is 1 MHz or greater (i.e., external oscillator 2 MHz or greater), the internal RC oscillator
must be turned off and the external oscillator used as the conversion clock.
If the MCU internal clock frequency is less than 1 MHz (2 MHz external oscillator), the internal RC
oscillator (approximately 1.5 MHz) must be used for the A/D converter clock. The internal RC clock is
selected by setting the ADRC bit in the ADSC register.
When the internal RC oscillator is being used, these limitations apply:
1. Since the internal RC oscillator is running asynchronously with respect to the internal clock, the
conversion complete bit (CC) in register ADSC must be used to determine when a conversion
sequence has been completed.
2. Electrical noise will slightly degrade the accuracy of the A/D converter. The A/D converter is
synchronized to read voltages during the quiet period of the clock driving it. Since the internal and
external clocks are not synchronized, the A/D converter will occasionally measure an input when
the external clock is making a transition.
9.4.3 Multi-Channel Operation
An input multiplexer allows the A/D converter to select from one of four external analog signals. Port C
pins PC3 through PC6 are shared with the inputs to the multiplexer.
9.5 A/D Status and Control Register (ADSC)
The ADSC register reports the completion of A/D conversion and provides control over oscillator
selection, analog subsystem power, and input channel selection. See Figure 9-1.
Address: $001E
Bit 7654321Bit 0
Read: CC
Write:
Reset:00000000
ADRC ADON
= Unimplemented
Figure 9-1. A/D Status and Control Register (ADSC)
CC — Conversion Complete
This read-only status bit is set when a conversion sequence has completed and data is ready to be
read from the ADC register. CC is cleared when the ADSC is written to or when data is read from the
ADC register. Once a conversion has been started, conversions of the selected channel will continue
every 32 internal clock cycles until the ADSC register is written to again. During continuous conversion
operation, the ADC register will be updated with new data, and the CC bit set every 32 internal clock
cycles. Also, data from the previous conversion will be overwritten regardless of the state of the CC bit.
00
CH2 CH1 CH0
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
54 Freescale Semiconductor

A/D Conversion Data Register (ADC)
ADRC — RC Oscillator Control
When ADRC is set, the A/D subsystem operates from the internal RC oscillator instead of the internal
clock. The RC oscillator requires a time, t
, to stabilize before accurate conversion results can be
RCON
obtained. See 9.2.2 Reference Voltage (VREFH) for more information.
ADON — A/D Subsystem On
When the A/D subsystem is turned on (ADON = 1), it requires a time, t
, to stabilize before
ADON
accurate conversion results can be attained.
CH2–CH0 — Channel Select Bits
CH2, CH1, and CH0 form a 3-bit field which is used to select an input to the A/D converter. Channels
0–3 correspond to port C input pins PC6–PC3. Channels 4–6 are used for reference measurements.
Channel 7 is reserved. If a conversion is attempted with channel 7 selected, the result will be $00.
Table 9-1 lists the inputs selected by bits CH0-CH3.
If the ADON bit is set and an input from channels 0–4 is selected, the corresponding port C pin’s DDR
bit will be cleared (making that port C pin an input). If the port C data register is read while the A/D is
on and one of the shared input channels is selected using bit CH0–CH2, the corresponding port C pin
will read as a logic 0. The remaining port C pins will read normally. To digitally read a port C pin, the
A/D subsystem must be disabled (ADON = 0), or input channels 5–7 must be selected.
Table 9-1. A/D Multiplexer Input Channel Assignments
Channel Signal
0 AD0 — port C, bit 6
1 AD1 — port C, bit 5
2 AD2 — port C, bit 4
3 AD3 — port C, bit 3
— port C, bit 7
4
5
6
7 Reserved for factory test
V
REFH
(V
REFH
+ VSS)/2
V
SS
9.6 A/D Conversion Data Register (ADC)
This register contains the output of the A/D converter. See Figure 9-2.
Address: $001D
Bit 7654321Bit 0
Read: AD7 AD6 AD5 AD4 AD3 AD2 AD1 AD0
Write:
Reset: Unaffected by reset
= Unimplemented
Figure 9-2. A/D Conversion Value Data Register (ADC)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 55

Analog Subsystem
9.7 A/D Subsystem Operation during Halt/Wait Modes
The A/D subsystem continues normal operation during wait and halt modes. To decrease power
consumption during wait or halt mode, the ADON and ADRC bits in the A/D status and control register
should be cleared if the A/D subsystem is not being used.
9.8 A/D Subsystem Operation during Stop Mode
When stop mode is enabled, execution of the STOP instruction will terminate all A/D subsystem functions.
Any pending conversion is aborted. When the oscillator resumes operation upon leaving stop mode, a
finite amount of time passes before the A/D subsystem stabilizes sufficiently to provide conversions at its
rated accuracy. The delays built into the MC68HC705P6A when coming out of stop mode are sufficient
for this purpose. No explicit delays need to be added to the application software.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
56 Freescale Semiconductor

Chapter 10
EPROM
10.1 Introduction
The user EPROM consists of 48 bytes of user page zero EPROM from $0020 to $004F, 4608 bytes of
user EPROM from $0100 to $12FF, the two MOR reset values located at $1EFF and $1F00, and 16 bytes
of user vectors EPROM from $1FF0 to $1FFF. The bootloader ROM and vectors are located from $1F01
to $1FEF.
10.2 EPROM Erasing
NOTE
Only parts packaged in a windowed package may be erased. Others are
one-time programmable and may not be erased by UV exposure.
The MC68HC705P6A can be erased by exposure to a high-intensity ultraviolet (UV) light with a
wavelength of 2537 angstroms. The recommended dose (UV intensity multiplied by exposure time) is
15 Ws/cm
positioned about one inch from the UV lamp. An erased EPROM byte will read as $00.
2
. UV lamps without shortwave filters should be used, and the EPROM device should be
10.3 EPROM Programming Sequence
The bootloader software goes through a complete write cycle of the EPROM including the MOR. This is
followed by a verify cycle which continually branches in a loop if an error is found. A sample routine to
program a byte of EPROM is shown in Table 10-1.
NOTE
To avoid damage to the MCU, V
must be applied to the MCU before VPP.
DD
10.4 EPROM Registers
Three registers are associated with the EPROM: the EPROM programming register (EPROG) and the
two mask option registers (MOR). The EPROG register controls the actual programming of the EPROM
bytes and the MOR. The MOR registers control the six mask options found on the ROM version of this
MCU (MC68HC05P6), the EPROM security feature, and eight additional port A interrupt options.
10.5 EPROM Programming Register (EPROG)
This register is used to program the EPROM array. Only the ELAT and EPGM bits are available.
Table 10-1 shows the location of each bit in the EPROG register and the state of these bits coming out of
reset. All the bits in the EPROG register are cleared by reset.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 57

EPROM
Address $001C
Bit 7654321Bit 0
Read:00000
Write:
Reset:00000000
= Unimplemented
ELAT
0
EPGM
Figure 10-1. EPROM Programming Register (EPROG)
EPGM — EPROM Program Control
If the EPGM bit is set, programming power is applied to the EPROM array. If the EPGM bit is cleared,
programming power is removed from the EPROM array. The EPGM bit cannot be set unless the ELAT
bit is set already.
Whenever the ELAT bit is cleared, the EPGM bit is cleared also. Both the EPGM and the ELAT bit
cannot be set using the same write instruction. Any attempt to set both the EPGM and ELAT bit on the
same write instruction cycle will result in the ELAT bit being set and the EPGM bit being cleared. The
EPGM bit is a read-write bit and can be read at any time. The EPGM bit is cleared by reset.
ELAT— EPROM Latch Control
If the ELAT bit is set, the EPROM address and data bus are configured for programming to the array.
If the ELAT bit is cleared, the EPROM address and data bus are configured for normal reading of data
from the array. When the ELAT bit is set, the address and data bus are latched in the EPROM array
when a subsequent write to the array is made. Data in the EPROM array cannot be read if the ELAT
bit is set.
Whenever the ELAT bit is cleared, the EPGM bit is cleared also. Both the EPGM and the ELAT bit
cannot be set using the same write instruction. Any attempt to set both the EPGM and ELAT bit on the
same write instruction cycle will result in the ELAT bit being set and the EPGM bit being cleared. The
ELAT bit is a read-write bit and can be read at any time. The ELAT bit is cleared by reset.
To program a byte of EPROM, manipulate the EPROG register as follows:
1. Set the ELAT bit in the EPROG register.
2. Write the desired data to the desired EPROM address.
3. Set the EPGM bit in the EPROG register for the specified programming time, t
EPGM
.
4. Clear the ELAT and EPGM bits in the EPROG register.
This sequence is also shown in the sample program listing in Table 10-1.
Table 10-1. EPROM Programming Routine
001C
0055
0700
0000
00D0 ORG $D0
00D0
00D2
00D4
00D6
00D9
00DB
00DD
00DF
A6 02
B7 1C
A6 55
C7 07 00
10 1C
AD 03
3F 1C
81
EPROG
DATA
EPROM
EPGM
EQU $1C
EQU $55
EQU $700
EQU $00
LDA #$04
STA EPROG
LDA #DATA
STA EPROM
BSET EPGM, EPROG
BSR DELAY
CLR EPROG
RTS
PROGRAMMING REG
DATA VALUE
A SAMPLE EPROM ADX
EPGM BIT IN EPROG REG
SET LAT BIT IN EPROG
DATA BYTE
WRITE IT TO EPROM LOC
TURN ON PGM VOLTAGE
WAIT 4 ms MINIMUM
CLR LAT AND PGM BITS
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
58 Freescale Semiconductor

EPROM Bootloader
10.6 EPROM Bootloader
Three port pins are associated with bootloader control functions: PC3, PC4, and PC6. Table 10-2
summarizes their functionality.
Table 10-2. Bootloader Control Pins
PC6 PC4 PC3 Mode
111 Program/verify
110 Verify only
1 0 0 Dump MCU EPROM to port A
10.7 Programming from an External Memory Device
In this programming mode, PC5 must be connected to VSS. PC4 and PC3 are used to select the
programming mode. The programming circuit shown in Figure 10-2 uses an external 12-bit counter to
address the memory device containing the code to be copied. This counter requires a clock and a reset
function. The 12-bit counter can address up to 4 Kbytes of memory, which means that a port pin has to
be used to address the remaining 4 K of the 8-K memory space.
The following procedure explains how to use the programming circuit shown in Figure 10-2 to copy a user
program from an external memory device into the MCU’s EPROM:
1. Program a 2764-type EPROM device with the desired instructions and data. Code programmed
into the 2764 must appear at the same addresses desired in the MC68HC705P6A. Therefore, the
page zero code must start at $0020 and end at $004F, the main body of code must start at $0100
and end at $12FF, and the user vectors must start at $1FF0 and end at $1FFF.
NOTE
The MOR data must appear at $1EFF and $1F00.
2. Install the programmed 2764 device into the programming circuit.
3. Install the MC68HC705P6A to be programmed into the programming circuit.
4. Set the PROGRAM and/or VERIFY switches for the desired operation (an open switch is the active
state) and close the RESET switch to hold the MCU in reset.
5. Make sure that the V
6. Apply the V
7. Apply the V
source to the programming circuit.
DD
source to the programming circuit.
PP
source is OFF.
PP
8. Open the RESET switch to allow the MCU to come out of reset and begin execution of the software
in its internal bootloader ROM.
9. Wait for programming and/or verification to complete (about 40 seconds). The PROGRAM LED will
light during programming and the VERIFY LED will light if verification was requested and was
successful.
10. When complete, close the RESET switch to force the MCU into the reset state.
11. Turn off the V
12. Turn off the V
source.
PP
source.
DD
13. Remove device(s).
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 59

EPROM
PROGRAM 2764 TYPE EPROM
INSTALL EPROM INTO PROGRAMMER
INSTALL MC68HC705P6A INTO PROGRAMMER
PROGRAMMING?
Y
OPEN PROGRAM SWITCH CLOSE PROGRAM SWITCH
VERIFYING?
Y
OPEN VERIFY SWITCH CLOSE VERIFY SWITCH
CLOSE RESET SWITCH
N
N
PROGRAMMING?
Y
WAIT FOR PROGRAMMING LED TO
TURN ON AND OFF.
VERIFYING?
Y
WAIT FOR 30 SECONDS
N
IS VERIFY
LED LIT?
Y
N
N
MAKE SURE VPP IS OFF
TURN VDD ON
TURN V
OPEN RESET SWITCH
PP
ON
VERIFICATION FAILED
VERIFICATION COMPLETE
CLOSE RESET SWITCH
TURN OFF V
TURN OFF V
REMOVE DEVICES
Figure 10-2. MC68HC705P6A EPROM Programming Flowchart
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
PP
DD
60 Freescale Semiconductor

MC68HC705P6A
Programming from an External Memory Device
V
DD
0 pF
V
PP
2 MHz
10 MΩ
RESET
V
DD
10 kΩ
1 µF
20 pF
V
DD
IRQ
OSC1
OSC2
RESET
PC6
/V
PP
PD7/TCAP
PB5
PA7
PA6
PA5
PA4
PA3
PA2
PA1
PA0
V
DD
V
DD
10 kΩ
A12
D7
D6
D5
D4
D3
D2
D1
D0
CE
OE
2764
PGM
A11
A10
A9
A8
A7
A6
A5
A4
A3
A2
A1
A0
10 kΩ
MC74HC4040
Q12
Q11
Q10
Q9
Q8
Q7
Q6
Q5
Q4
Q3
Q2
Q1
RST
CLK
330 Ω
330 Ω
PROG
PB7
VERF
PB6
PC5
PC1
PC2
PC3
PC4
V
DD
10 kΩ
V
DD
10 kΩ
PGM
VFY
Figure 10-3. MC68HC705P6A EPROM Programming Schematic Diagram
V
V
DD
PP
= 5.0 V
= 16.5 V
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 61

EPROM
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
62 Freescale Semiconductor

Chapter 11
Mask Option Register (MOR)
11.1 Introduction
The mask option register (MOR) contains two bytes of EPROM used to enable or disable each of the
features controlled by mask options on the MC68HC05P6 (a ROM version of the MC68HC705P6A).
The seven programmable options on the MC68HC705P6A are:
1. COP watchdog timer (enable or disable)
2. IRQ
3. SIOP data bit order (most significant bit or least significant bit first)
4. SIOP clock rate (OSC divided by 8, 16, 32, or 64)
5. Stop instruction mode (stop mode or halt mode)
6. Secure EPROM from external reading
7. Keyscan interrupt/pullups on PA0–PA7
11.2 Mask Option Register
Mask options are programmed into the mask option register (MOR) by the firmware in the bootloader
ROM. See Figure 11-1.
triggering (edge- or edge- and level-sensitive)
Address: $1EFF
Bit 7654321Bit 0
Read:
Write:
Erased State:00000000
Address: $1F00
Read:
Write:
Erased State:00000000
PA7PU PA6PU PA5PU PA4PU PA3PU PA2PU PA1PU PA0PU
Bit 7654321Bit 0
SECURE
= Unimplemented
SWAIT SPR1 SPR0 LSBF LEVEL COP
Figure 11-1. Mask Option Register (MOR)
COP — COP Watchdog Enable
Setting the COP bit will enable the COP watchdog timer. The COP will reset the MCU if the timeout
period is reached before the COP watchdog timer is cleared by the application software and the
voltage applied to the IRQ
watchdog timer regardless of the voltage applied to the IRQ
/VPP pin is between VSS and VDD. Clearing the COP bit will disable the COP
/VPP pin.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 63

Mask Option Register (MOR)
LEVEL — IRQ Edge Sensitivity
If the LEVEL bit is clear, the IRQ
to the IRQ
/VPP pin. If the LEVEL bit is set, the IRQ/VPP pin will be sensitive to both the falling edge of
the input signal and the logic low level of the input signal on the IRQ
/VPP pin will only be sensitive to the falling edge of the signal applied
/VPP pin.
LSBF — SIOP Least Significant Bit First
If the LSBF bit is set, the serial data to and from the SIOP will be transferred least significant bit first.
If the LSBF bit is clear, the serial data to and from the SIOP will be transferred most significant bit first.
SPR0 and SPR1 — SIOP Clock Rate
The SPR0 and SPR1 bits determine the clock rate used to transfer the serial data to and from the
SIOP. The various clock rates available are given in Table 11-1.
Table 11-1. SIOP Clock Rate
SPR1 SPR0 SIOP Master Clock
÷ 64
00
01
10
11
f
f
f
osc
osc
osc
f
osc
÷ 32
÷ 16
÷ 8
SWAIT — STOP Instruction Mode
Setting the SWAIT bit will prevent the STOP instruction from stopping the on-board oscillator. Clearing
the SWAIT bit will permit the STOP instruction to stop the on-board oscillator and place the MCU in
stop mode. Executing the STOP instruction when SWAIT is set will place the MCU in halt mode. See
3.4.1 STOP Instruction for additional information.
SECURE — Security State
(1)
If SECURE bit is set, the EPROM is locked.
PA(0:7)PU — Port A Pullups/Interrupt Enable/Disable
If any PA(0:7)PU is selected, that pullup/interrupt is enabled. The interrupt sensitivity will be selected
via the LEVEL bit in the same way as the IRQ
pin.
NOTE
The port A pullup/interrupt function is NOT available on the ROM device,
MC68HC05P6.
1. No security feature is absolutely secure. However, Freescale’s strategy is to make reading or copying the EPROM/OTPROM
difficult for unauthorized users.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
64 Freescale Semiconductor

MOR Programming
11.3 MOR Programming
The contents of the MOR should be programmed in bootloader mode using the hardware shown in
Figure 10-2. MC68HC705P6A EPROM Programming Flowchart. In order to allow programming, all the
implemented bits in the MOR are essentially read-write bits in bootloader mode as shown in Figure 11-1.
The programming of the MOR is the same as user EPROM.
1. Set the ELAT bit in the EPROG register.
2. Write the desired data to the desired MOR address.
3. Set the EPGM bit in the EPROG.
4. Wait for the programming time (t
5. Clear the ELAT and EPGM bits in the EPROG.
6. Remove the programming voltage from the IRQ
A sample routine to program a byte of EPROM is shown in Table 11-2.
Once the MOR bits have been programmed, the options are not loaded into the MOR registers until the
part is reset.
Table 11-2. MOR Programming Routine
EPGM
).
/VPP pin.
001C
00FF
0023
1EFF
1F00
0000
00E0 ORG $E0
00E0
00E2
00E4
00E6
00E9
00EB
00ED
00EF
A6 04
B7 1C
A6 FF
C7 1E FF
12 1C
AD 03
3F 1C
81
EPROG
DATA2
DATA1
MOR2
MOR1
EPGM
EQU $1C
EQU $FF
EQU #23
EQU $1EFF
EQU $1F00
EQU $00
LDA #$04
STA EPROG
LDA #DATA2
STA MOR2
BSET EPGM,EPROG
BSR DELAY
CLR EPROG
RTS
PROGRAMMING REG
SAMPLE MOR VALUES
MOPR ADDRESSES
EPGM BIT IN EPROG REG
SET ELAT BIT
IN EPGM REG AT $1C
DATA BYTE
WRITE IT TO MOR LOC
TURN ON PGM VOLTAGE
WAIT 4 ms MINIMUM
CLR EPGM REGISTER
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 65

Mask Option Register (MOR)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
66 Freescale Semiconductor

Chapter 12
Central Processor Unit (CPU) Core
12.1 Introduction
The MC68HC705P6A has an 8-K memory map. Therefore, it uses only the lower 13 bits of the address
bus. In the following discussion, the upper three bits of the address bus can be ignored. Also, the STOP
instruction can be modified to place the MCU in either the normal stop mode or the halt mode by means
of a MOR bit. All other instructions and registers behave as described in this section.
12.2 Registers
The MCU contains five registers which are hard-wired within the CPU and are not part of the memory
map. These five registers are shown in Figure 12-1 and are described in the following paragraphs.
60
71
4523
14 815 91213 1011
CONDITION CODE REGISTER I
1100000000
PROGRAM COUNTER
HALF-CARRY BIT (FROM BIT 3)
INTERRUPT MASK
NEGATIVE BIT
ZERO BIT
CARRY BIT
ACCUMULATOR
INDEX REGISTER
STACK POINTER SP
HNZC
A
X
PC
CC111
Figure 12-1. MC68HC05 Programming Model
12.2.1 Accumulator
The accumulator is a general-purpose 8-bit register as shown in Figure 12-1. The CPU uses the
accumulator to hold operands and results of arithmetic calculations or non-arithmetic operations. The
accumulator is unaffected by a reset of the device.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 67

Central Processor Unit (CPU) Core
12.2.2 Index Register
The index register shown in Figure 12-1 is an 8-bit register that can perform two functions:
• Indexed addressing
• Temporary storage
In indexed addressing with no offset, the index register contains the low byte of the operand address, and
the high byte is assumed to be $00. In indexed addressing with an 8-bit offset, the CPU finds the operand
address by adding the index register contents to an 8-bit immediate value. In indexed addressing with a
16-bit offset, the CPU finds the operand address by adding the index register contents to a 16-bit
immediate value.
The index register can also serve as an auxiliary accumulator for temporary storage. The index register
is unaffected by a reset of the device.
12.2.3 Stack Pointer
The stack pointer shown in Figure 12-1 is a 16-bit register internally. In devices with memory maps less
than 64 Kbytes, the unimplemented upper address lines are ignored. The stack pointer contains the
address of the next free location on the stack. During a reset or the reset stack pointer (RSP) instruction,
the stack pointer is set to $00FF. The stack pointer is then decremented as data is pushed onto the stack
and incremented as data is pulled from the stack.
When accessing memory, the 10 most significant bits are permanently set to 0000000011. The six least
significant register bits are appended to these 10 fixed bits to produce an address within the range of
$00FF to $00C0. Subroutines and interrupts may use up to 64 ($40) locations. If 64 locations are
exceeded, the stack pointer wraps around and writes over the previously stored information. A subroutine
call occupies two locations on the stack and an interrupt uses five locations.
12.2.4 Program Counter
The program counter shown in Figure 12-1 is a 16-bit register internally. In devices with memory maps
less than 64 Kbytes, the unimplemented upper address lines are ignored. The program counter contains
the address of the next instruction or operand to be fetched.
Normally, the address in the program counter increments to the next sequential memory location every
time an instruction or operand is fetched. Jump, branch, and interrupt operations load the program
counter with an address other than that of the next sequential location.
12.2.5 Condition Code Register
The CCR shown in Figure 12-1 is a 5-bit register in which four bits are used to indicate the results of the
instruction just executed. The fifth bit is the interrupt mask. These bits can be individually tested by a
program, and specific actions can be taken as a result of their state. The condition code register should
be thought of as having three additional upper bits that are always ones. Only the interrupt mask is
affected by a reset of the device. The following paragraphs explain the functions of the lower five bits of
the condition code register.
H — Half Carry Bit
When the half-carry bit is set, it means that a carry occurred between bits 3 and 4 of the accumulator
during the last ADD or ADC (add with carry) operation. The half-carry bit is required for binary-coded
decimal (BCD) arithmetic operations.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
68 Freescale Semiconductor

Registers
I — Interrupt Mask Bit
When the interrupt mask is set, the internal and external interrupts are disabled. Interrupts are enabled
when the interrupt mask is cleared. When an interrupt occurs, the interrupt mask is automatically set
after the CPU registers are saved on the stack, but before the interrupt vector is fetched. If an interrupt
request occurs while the interrupt mask is set, the interrupt request is latched. Normally, the interrupt
is processed as soon as the interrupt mask is cleared.
A return from interrupt (RTI) instruction pulls the CPU registers from the stack, restoring the interrupt
mask to its state before the interrupt was encountered. After any reset, the interrupt mask is set and
can only be cleared by the clear I bit (CLI), STOP, or WAIT instructions.
N — Negative Bit
The negative bit is set when the result of the last arithmetic operation, logical operation, or data
manipulation was negative. (Bit 7 of the result was a logic one.)
The negative bit can also be used to check an often-tested flag by assigning the flag to bit 7 of a
register or memory location. Loading the accumulator with the contents of that register or location then
sets or clears the negative bit according to the state of the flag.
Z — Zero Bit
The zero bit is set when the result of the last arithmetic operation, logical operation, data manipulation,
or data load operation was zero.
C — Carry/Borrow Bit
The carry/borrow bit is set when a carry out of bit 7 of the accumulator occurred during the last
arithmetic operation, logical operation, or data manipulation. The carry/borrow bit is also set or cleared
during bit test and branch instructions and during shifts and rotates. This bit is not set by an INC or
DEC instruction.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 69

Central Processor Unit (CPU) Core
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
70 Freescale Semiconductor

Chapter 13
Instruction Set
13.1 Introduction
The MCU instruction set has 62 instructions and uses eight addressing modes. The instructions include
all those of the M146805 CMOS Family plus one more: the unsigned multiply (MUL) instruction. The MUL
instruction allows unsigned multiplication of the contents of the accumulator (A) and the index register (X).
The high-order product is stored in the index register, and the low-order product is stored in the
accumulator.
13.2 Addressing Modes
The CPU uses eight addressing modes for flexibility in accessing data. The addressing modes provide
eight different ways for the CPU to find the data required to execute an instruction. The eight addressing
modes are:
• Inherent
•Immediate
•Direct
• Extended
• Indexed, no offset
• Indexed, 8-bit offset
• Indexed, 16-bit offset
• Relative
13.2.1 Inherent
Inherent instructions are those that have no operand, such as return from interrupt (RTI) and stop (STOP).
Some of the inherent instructions act on data in the CPU registers, such as set carry flag (SEC) and
increment accumulator (INCA). Inherent instructions require no operand address and are one byte long.
13.2.2 Immediate
Immediate instructions are those that contain a value to be used in an operation with the value in the
accumulator or index register. Immediate instructions require no operand address and are two bytes long.
The opcode is the first byte, and the immediate data value is the second byte.
13.2.3 Direct
Direct instructions can access any of the first 256 memory locations with two bytes. The first byte is the
opcode, and the second is the low byte of the operand address. In direct addressing, the CPU
automatically uses $00 as the high byte of the operand address.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 71

Instruction Set
13.2.4 Extended
Extended instructions use three bytes and can access any address in memory. The first byte is the
opcode; the second and third bytes are the high and low bytes of the operand address.
When using the Freescale assembler, the programmer does not need to specify whether an instruction is
direct or extended. The assembler automatically selects the shortest form of the instruction.
13.2.5 Indexed, No Offset
Indexed instructions with no offset are 1-byte instructions that can access data with variable addresses
within the first 256 memory locations. The index register contains the low byte of the effective address of
the operand. The CPU automatically uses $00 as the high byte, so these instructions can address
locations $0000–$00FF.
Indexed, no offset instructions are often used to move a pointer through a table or to hold the address of
a frequently used RAM or I/O location.
13.2.6 Indexed, 8-Bit Offset
Indexed, 8-bit offset instructions are 2-byte instructions that can access data with variable addresses
within the first 511 memory locations. The CPU adds the unsigned byte in the index register to the
unsigned byte following the opcode. The sum is the effective address of the operand. These instructions
can access locations $0000–$01FE.
Indexed 8-bit offset instructions are useful for selecting the kth element in an n-element table. The table
can begin anywhere within the first 256 memory locations and could extend as far as location 510
($01FE). The k value is typically in the index register, and the address of the beginning of the table is in
the byte following the opcode.
13.2.7 Indexed,16-Bit Offset
Indexed, 16-bit offset instructions are 3-byte instructions that can access data with variable addresses at
any location in memory. The CPU adds the unsigned byte in the index register to the two unsigned bytes
following the opcode. The sum is the effective address of the operand. The first byte after the opcode is
the high byte of the 16-bit offset; the second byte is the low byte of the offset.
Indexed, 16-bit offset instructions are useful for selecting the kth element in an n-element table anywhere
in memory.
As with direct and extended addressing, the Freescale assembler determines the shortest form of
indexed addressing.
13.2.8 Relative
Relative addressing is only for branch instructions. If the branch condition is true, the CPU finds the
effective branch destination by adding the signed byte following the opcode to the contents of the program
counter. If the branch condition is not true, the CPU goes to the next instruction. The offset is a signed,
two’s complement byte that gives a branching range of –128 to +127 bytes from the address of the next
location after the branch instruction.
When using the Freescale assembler, the programmer does not need to calculate the offset, because the
assembler determines the proper offset and verifies that it is within the span of the branch.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
72 Freescale Semiconductor
Instruction Types
13.3 Instruction Types
The MCU instructions fall into the following five categories:
• Register/memory instructions
• Read-modify-write instructions
• Jump/branch instructions
• Bit manipulation instructions
• Control instructions
13.3.1 Register/Memory Instructions
These instructions operate on CPU registers and memory locations. Most of them use two operands. One
operand is in either the accumulator or the index register. The CPU finds the other operand in memory.
Table 13-1. Register/Memory Instructions
Instruction Mnemonic
Add Memory Byte and Carry Bit to Accumulator ADC
Add Memory Byte to Accumulator ADD
AND Memory Byte with Accumulator AND
Bit Test Accumulator BIT
Compare Accumulator CMP
Compare Index Register with Memory Byte CPX
EXCLUSIVE OR Accumulator with Memory Byte EOR
Load Accumulator with Memory Byte LDA
Load Index Register with Memory Byte LDX
Multiply MUL
OR Accumulator with Memory Byte ORA
Subtract Memory Byte and Carry Bit from Accumulator SBC
Store Accumulator in Memory STA
Store Index Register in Memory STX
Subtract Memory Byte from Accumulator SUB
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 73

Instruction Set
13.3.2 Read-Modify-Write Instructions
These instructions read a memory location or a register, modify its contents, and write the modified value
back to the memory location or to the register.
NOTE
Do not use read modify-write operations on write-only registers.
Table 13-2. Read-Modify-Write Instructions
Instruction Mnemonic
Arithmetic Shift Left (Same as LSL) ASL
Arithmetic Shift Right ASR
Bit Clear
Bit Set
Clear Register CLR
Complement (One’s Complement) COM
Decrement DEC
Increment INC
BCLR
BSET
(1)
(1)
Logical Shift Left (Same as ASL) LSL
Logical Shift Right LSR
Negate (Two’s Complement) NEG
Rotate Left through Carry Bit ROL
Rotate Right through Carry Bit ROR
Test for Negative or Zero
1. Unlike other read-modify-write instructions, BCLR and
BSET use only direct addressing.
2. TST is an exception to the read-modify-write sequence
because it does not write a replacement value.
TST
(2)
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
74 Freescale Semiconductor

Instruction Types
13.3.3 Jump/Branch Instructions
Jump instructions allow the CPU to interrupt the normal sequence of the program counter. The
unconditional jump instruction (JMP) and the jump-to-subroutine instruction (JSR) have no register
operand. Branch instructions allow the CPU to interrupt the normal sequence of the program counter
when a test condition is met. If the test condition is not met, the branch is not performed.
The BRCLR and BRSET instructions cause a branch based on the state of any readable bit in the first
256 memory locations. These 3-byte instructions use a combination of direct addressing and relative
addressing. The direct address of the byte to be tested is in the byte following the opcode. The third byte
is the signed offset byte. The CPU finds the effective branch destination by adding the third byte to the
program counter if the specified bit tests true. The bit to be tested and its condition (set or clear) is part of
the opcode. The span of branching is from –128 to +127 from the address of the next location after the
branch instruction. The CPU also transfers the tested bit to the carry/borrow bit of the condition code
register.
Table 13-3. Jump and Branch Instructions
Instruction Mnemonic
Branch if Carry Bit Clear BCC
Branch if Carry Bit Set BCS
Branch if Equal BEQ
Branch if Half-Carry Bit Clear BHCC
Branch if Half-Carry Bit Set BHCS
Branch if Higher BHI
Branch if Higher or Same BHS
Branch if IRQ
Branch if IRQ
Branch if Lower BLO
Branch if Lower or Same BLS
Branch if Interrupt Mask Clear BMC
Branch if Minus BMI
Branch if Interrupt Mask Set BMS
Branch if Not Equal BNE
Branch if Plus BPL
Branch Always BRA
Branch if Bit Clear BRCLR
Branch Never BRN
Branch if Bit Set BRSET
Branch to Subroutine BSR
Pin High BIH
Pin Low BIL
Unconditional Jump JMP
Jump to Subroutine JSR
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 75

Instruction Set
13.3.4 Bit Manipulation Instructions
The CPU can set or clear any writable bit in the first 256 bytes of memory, which includes I/O registers
and on-chip RAM locations. The CPU can also test and branch based on the state of any bit in any of the
first 256 memory locations.
Table 13-4. Bit Manipulation Instructions
Instruction Mnemonic
Bit Clear BCLR
Branch if Bit Clear BRCLR
Branch if Bit Set BRSET
Bit Set BSET
13.3.5 Control Instructions
These instructions act on CPU registers and control CPU operation during program execution.
Table 13-5. Control Instructions
Instruction Mnemonic
Clear Carry Bit CLC
Clear Interrupt Mask CLI
No Operation NOP
Reset Stack Pointer RSP
Return from Interrupt RTI
Return from Subroutine RTS
Set Carry Bit SEC
Set Interrupt Mask SEI
Stop Oscillator and Enable IRQ
Software Interrupt SWI
Transfer Accumulator to Index Register TAX
Transfer Index Register to Accumulator TXA
Stop CPU Clock and Enable Interrupts WAIT
Pin STOP
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
76 Freescale Semiconductor

Instruction Set Summary
13.4 Instruction Set Summary
Table 13-6 is an alphabetical list of all M68HC05 instructions and shows the effect of each instruction on
the condition code register.
Table 13-6. Instruction Set Summary (Sheet 1 of 6)
Source
Form
ADC #opr
ADC opr
ADC opr
ADC opr,X
ADC opr,X
ADC ,X
ADD #opr
ADD opr
ADD opr
ADD opr,X
ADD opr,X
ADD ,X
AND #opr
AND opr
AND opr
AND opr,X
AND opr,X
AND ,X
ASL opr
ASLA
ASLX
ASL opr,X
ASL ,X
ASR opr
ASRA
ASRX
ASR opr,X
ASR ,X
BCC rel Branch if Carry Bit Clear PC ← (PC) + 2 + rel ? C = 0 ————— REL 24 rr 3
BCLR n opr Clear Bit n Mn ← 0 —————
BCS rel Branch if Carry Bit Set (Same as BLO) PC ← (PC) + 2 + rel ? C = 1 ————— REL 25 rr 3
BEQ rel Branch if Equal PC ← (PC) + 2 + rel ? Z = 1 ————— REL 27 rr 3
BHCC rel Branch if Half-Carry Bit Clear PC ← (PC) + 2 + rel ? H = 0 ————— REL 28 rr 3
BHCS rel Branch if Half-Carry Bit Set PC ← (PC) + 2 + rel ? H = 1 ————— REL 29 rr 3
BHI rel Branch if Higher PC ← (PC) + 2 + rel ? C ∨ Z = 0 ————— REL 22 rr 3
BHS rel Branch if Higher or Same PC ← (PC) + 2 + rel ? C = 0 ————— REL 24 rr 3
Add with Carry A ← (A) + (M) + (C) —
Add without Carry A ← (A) + (M) —
Logical AND A ← (A) ∧ (M) — — —
Arithmetic Shift Left (Same as LSL) — —
Arithmetic Shift Right — —
Operation Description
C
b7
b7
0
b0
C
b0
on CCR
HINZC
Address
IMM
DIR
EXT
IX2
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
DIR
INH
INH
IX1
IX
DIR (b0)
DIR (b1)
DIR (b2)
DIR (b3)
DIR (b4)
DIR (b5)
DIR (b6)
DIR (b7)
Mode
A9
B9
C9
D9
E9
F9
AB
BB
CB
DB
EB
FB
A4
B4
C4
D4
E4
F4
38
48
58
68
78
37
47
57
67
77
11
13
15
17
19
1B
1D
1F
Opcode
ii
dd
hh ll
ee ff
ff
ii
dd
hh ll
ee ff
ff
ii
dd
hh ll
ee ff
ff
dd
ff
dd
ff
dd
dd
dd
dd
dd
dd
dd
dd
Operand
2
3
4
5
4
3
2
3
4
5
4
3
2
3
4
5
4
3
5
3
3
6
5
5
3
3
6
5
5
5
5
5
5
5
5
5
Effect
Cycles
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 77

Instruction Set
Table 13-6. Instruction Set Summary (Sheet 2 of 6)
Source
Form
BIH rel Branch if IRQ Pin High PC ← (PC) + 2 + rel ? IRQ = 1 ————— REL 2F rr 3
BIL rel Branch if IRQ Pin Low PC ← (PC) + 2 + rel ? IRQ = 0 ————— REL 2E rr 3
BIT #opr
BIT opr
BIT opr
BIT opr,X
BIT opr,X
BIT ,X
BLO rel Branch if Lower (Same as BCS) PC ← (PC) + 2 + rel ? C = 1 ————— REL 25 rr 3
BLS rel Branch if Lower or Same PC ← (PC) + 2 + rel ? C ∨ Z = 1 ————— REL 23 rr 3
BMC rel Branch if Interrupt Mask Clear PC ← (PC) + 2 + rel ? I = 0 ————— REL 2C rr 3
BMI rel Branch if Minus PC ← (PC) + 2 + rel ? N = 1 ————— REL 2B rr 3
BMS rel Branch if Interrupt Mask Set PC ← (PC) + 2 + rel ? I = 1 ————— REL 2D rr 3
BNE rel Branch if Not Equal PC ← (PC) + 2 + rel ? Z = 0 ————— REL 26 rr 3
BPL rel Branch if Plus PC ←
BRA rel Branch Always PC ← (PC) + 2 + rel ? 1 = 1 ————— REL 20 rr 3
BRCLR n opr rel Branch if Bit n Clear PC ← (PC) + 2 + rel ? Mn = 0 ————
BRN rel Branch Never PC ← (PC) + 2 + rel ? 1 = 0 ————— REL 21 rr 3
BRSET n opr rel Branch if Bit n Set PC ← (PC) + 2 + rel ? Mn = 1 ————
BSET n opr Set Bit n Mn ← 1 —————
BSR rel Branch to Subroutine
CLC Clear Carry Bit C ← 0 ———— 0 INH 98 2
CLI Clear Interrupt Mask I ← 0 — 0 ——— INH 9A 2
Bit Test Accumulator with Memory Byte (A) ∧ (M) — — —
Operation Description
(PC) + 2 + rel ? N = 0 ————— REL 2A rr 3
PC ← (PC) + 2; push (PCL)
SP ← (SP) – 1; push (PCH)
SP ← (SP) – 1
PC ← (PC) + rel
on CCR
HINZC
————— REL AD rr 6
Address
IMM
DIR
EXT
IX2
IX1
IX
DIR (b0)
DIR (b1)
DIR (b2)
DIR (b3)
DIR (b4)
DIR (b5)
DIR (b6)
DIR (b7)
DIR (b0)
DIR (b1)
DIR (b2)
DIR (b3)
DIR (b4)
DIR (b5)
DIR (b6)
DIR (b7)
DIR (b0)
DIR (b1)
DIR (b2)
DIR (b3)
DIR (b4)
DIR (b5)
DIR (b6)
DIR (b7)
Mode
A5
B5
C5
D5
E5
F5
01
03
05
07
09
0B
0D
0F
00
02
04
06
08
0A
0C
0E
10
12
14
16
18
1A
1C
1E
Opcode
ii
dd
hh ll
ee ff
ff
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd rr
dd
dd
dd
dd
dd
dd
dd
dd
Operand
2
3
4
5
4
3
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
5
Effect
Cycles
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
78 Freescale Semiconductor

Table 13-6. Instruction Set Summary (Sheet 3 of 6)
Instruction Set Summary
Source
Form
CLR opr
CLRA
CLRX
CLR opr,X
CLR ,X
CMP #opr
CMP opr
CMP opr
CMP opr,X
CMP opr,X
CMP ,X
COM opr
COMA
COMX
COM opr,X
COM ,X
CPX #opr
CPX opr
CPX opr
CPX opr,X
CPX opr,X
CPX ,X
DEC opr
DECA
DECX
DEC opr,X
DEC ,X
EOR #opr
EOR opr
EOR opr
EOR opr,X
EOR opr,X
EOR ,X
INC opr
INCA
INCX
INC opr,X
INC ,X
JMP opr
JMP opr
JMP opr,X
JMP opr,X
JMP ,X
JSR opr
JSR opr
JSR opr,X
JSR opr,X
JSR ,X
Effect
Operation Description
on CCR
HINZC
M ← $00
A ← $00
Clear Byte
Compare Accumulator with Memory Byte (A) – (M) — —
Complement Byte (One’s Complement)
Compare Index Register with Memory Byte (X) – (M) — —
Decrement Byte
EXCLUSIVE OR Accumulator with Memory
Byte
Increment Byte
Unconditional Jump PC ← Jump Address —————
PC ← (PC) + n (n = 1, 2, or 3)
Jump to Subroutine
Push (PCL); SP ← (SP) – 1
Push (PCH); SP ← (SP) – 1
X ← $00
M ← $00
M ← $00
M ← (M
) = $FF – (M)
A ← (A
) = $FF – (A)
X ← (X
) = $FF – (X)
M ← (M
) = $FF – (M)
M ← (M
) = $FF – (M)
M ← (M) – 1
A ← (A) – 1
X ← (X) – 1
M ← (M) – 1
M ← (M) – 1
A ← (A) ⊕ (M) — — —
M ← (M) + 1
A ← (A) + 1
X ← (X) + 1
M ← (M) + 1
M ← (M) + 1
PC ← Effective Address
—— 0 1 —
——
—— —
—— —
—————
1
Mode
Address
DIR
INH
INH
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
DIR
EXT
IX2
IX1
IX
DIR
EXT
IX2
IX1
IX
3F
4F
5F
6F
7F
A1
B1
C1
D1
E1
F1
33
43
53
63
73
A3
B3
C3
D3
E3
F3
3A
4A
5A
6A
7A
A8
B8
C8
D8
E8
F8
3C
4C
5C
6C
7C
BC
CC
DC
EC
FC
BD
CD
DD
ED
FD
Opcode
dd
ff
ii
dd
hh ll
ee ff
ff
dd
ff
ii
dd
hh ll
ee ff
ff
dd
ff
ii
dd
hh ll
ee ff
ff
dd
ff
dd
hh ll
ee ff
ff
dd
hh ll
ee ff
ff
Operand
Cycles
5
3
3
6
5
2
3
4
5
4
3
5
3
3
6
5
2
3
4
5
4
3
5
3
3
6
5
2
3
4
5
4
3
5
3
3
6
5
2
3
4
3
2
5
6
7
6
5
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 79
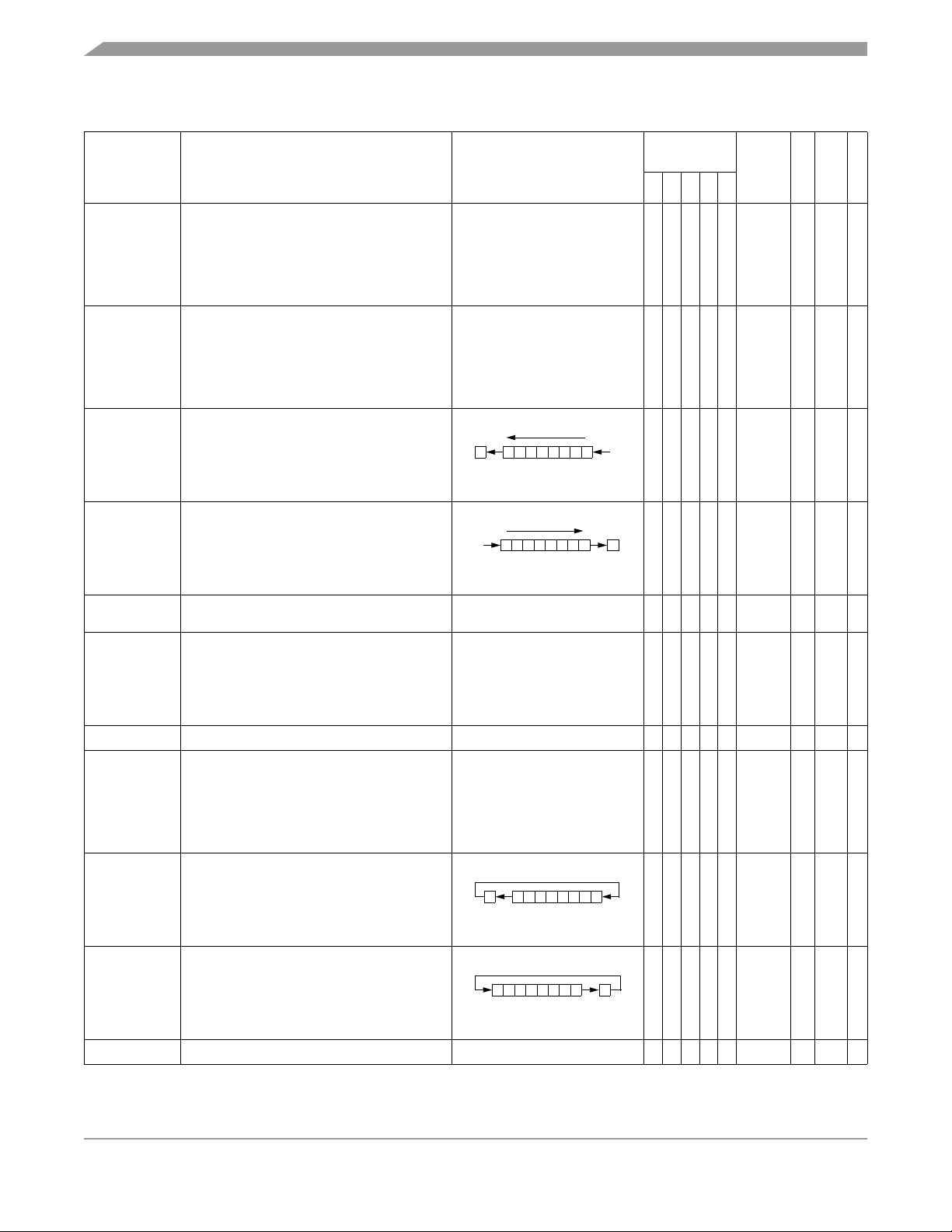
Instruction Set
Table 13-6. Instruction Set Summary (Sheet 4 of 6)
Source
Form
LDA #opr
LDA opr
LDA opr
LDA opr,X
LDA opr,X
LDA ,X
LDX #opr
LDX opr
LDX opr
LDX opr,X
LDX opr,X
LDX ,X
LSL opr
LSLA
LSLX
LSL opr,X
LSL ,X
LSR opr
LSRA
LSRX
LSR opr,X
LSR ,X
MUL Unsigned Multiply X : A ← (X) × (A) 0 ——— 0 INH 42
NEG opr
NEGA
NEGX
NEG opr,X
NEG ,X
Load Accumulator with Memory Byte A ← (M) — — —
Load Index Register with Memory Byte X ← (M) — — —
Logical Shift Left (Same as ASL) — —
Logical Shift Right — — 0
Negate Byte (Two’s Complement)
Operation Description
C
b7
b7
M ← –(M) = $00 – (M)
A ← –(A) = $00 – (A)
X ← –(X) = $00 – (X)
M ← –(M) = $00 – (M)
M ← –(M) = $00 – (M)
0
b0
C0
b0
on CCR
HINZC
——
Mode
Address
IMM
DIR
EXT
IX2
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
DIR
INH
INH
IX1
IX
DIR
INH
INH
IX1
IX
A6
B6
C6
D6
E6
F6
AE
BE
CE
DE
EE
FE
38
48
58
68
78
34
44
54
64
74
30
40
50
60
70
Effect
Opcode
ii
dd
hh ll
ee ff
ff
ii
dd
hh ll
ee ff
ff
dd
ff
dd
ff
dd
ff
Operand
Cycles
2
3
4
5
4
3
2
3
4
5
4
3
5
3
3
6
5
5
3
3
6
5
1
1
5
3
3
6
5
NOP No Operation ————— INH 9D 2
ii
AA
ORA #opr
ORA opr
ORA opr
ORA opr,X
ORA opr,X
ORA ,X
ROL opr
ROLA
ROLX
ROL opr,X
ROL ,X
ROR opr
RORA
RORX
ROR opr,X
ROR ,X
RSP Reset Stack Pointer SP ← $00FF — ———— INH 9C 2
Logical OR Accumulator with Memory A ← (A) ∨ (M) — — —
Rotate Byte Left through Carry Bit — —
Rotate Byte Right through Carry Bit — —
C
b7
b7
b0
C
b0
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
DIR
INH
INH
IX1
IX
BA
CA
DA
EA
FA
39
49
59
69
79
36
46
56
66
76
dd
hh ll
ee ff
ff
dd
ff
dd
ff
2
3
4
5
4
3
5
3
3
6
5
5
3
3
6
5
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
80 Freescale Semiconductor

Table 13-6. Instruction Set Summary (Sheet 5 of 6)
Instruction Set Summary
Source
Form
RTI Return from Interrupt
RTS Return from Subroutine
SBC #opr
SBC opr
SBC opr
SBC opr,X
SBC opr,X
SBC ,X
SEC Set Carry Bit C ← 1 ———— 1 INH 99 2
SEI Set Interrupt Mask I ← 1 — 1 ——— INH 9B 2
STA opr
STA opr
STA opr,X
STA opr,X
STA ,X
STOP Stop Oscillator and Enable IRQ Pin — 0 — — — INH 8E 2
STX opr
STX opr
STX opr,X
STX opr,X
STX ,X
SUB #opr
SUB opr
SUB opr
SUB opr,X
SUB opr,X
SUB ,X
SWI Software Interrupt
TAX Transfer Accumulator to Index Register X ← (A) ————— INH 97 2
TST opr
TSTA
TSTX
TST opr,X
TST ,X
Subtract Memory Byte and Carry Bit from
Accumulator
Store Accumulator in Memory M ← (A) — — —
Store Index Register In Memory M ← (X) — — —
Subtract Memory Byte from Accumulator A ← (A) – (M) — —
Test Memory Byte for Negative or Zero (M) – $00 — — —
Operation Description
SP ← (SP) + 1; Pull (CCR)
SP ← (SP) + 1; Pull (A)
SP ← (SP) + 1; Pull (X)
SP ← (SP) + 1; Pull (PCH)
SP ← (SP) + 1; Pull (PCL)
SP ← (SP) + 1; Pull (PCH)
SP ← (SP) + 1; Pull (PCL)
A ← (A) – (M) – (C) — —
PC ← (PC) + 1; Push (PCL)
SP ← (SP) – 1; Push (PCH)
SP ← (SP) – 1; Push (X)
SP ← (SP) – 1; Push (A)
SP ← (SP) – 1; Push (CCR)
SP ← (SP) – 1; I ← 1
PCH ← Interrupt Vector High Byte
PCL ←
Interrupt Vector Low Byte
on CCR
HINZC
INH 80 9
————— INH 81 6
— 1 ——— INH 83
Mode
Address
IMM
DIR
EXT
IX2
IX1
IX
DIR
EXT
IX2
IX1
IX
DIR
EXT
IX2
IX1
IX
IMM
DIR
EXT
IX2
IX1
IX
DIR
INH
INH
IX1
IX
A2
B2
C2
D2
E2
F2
B7
C7
D7
E7
F7
BF
CF
DF
EF
FF
A0
B0
C0
D0
E0
F0
3D
4D
5D
6D
7D
Opcode
ii
dd
hh ll
ee ff
ff
dd
hh ll
ee ff
ff
dd
hh ll
ee ff
ff
ii
dd
hh ll
ee ff
ff
dd
ff
Operand
2
3
4
5
4
3
4
5
6
5
4
4
5
6
5
4
2
3
4
5
4
3
1
0
4
3
3
5
4
Effect
Cycles
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 81
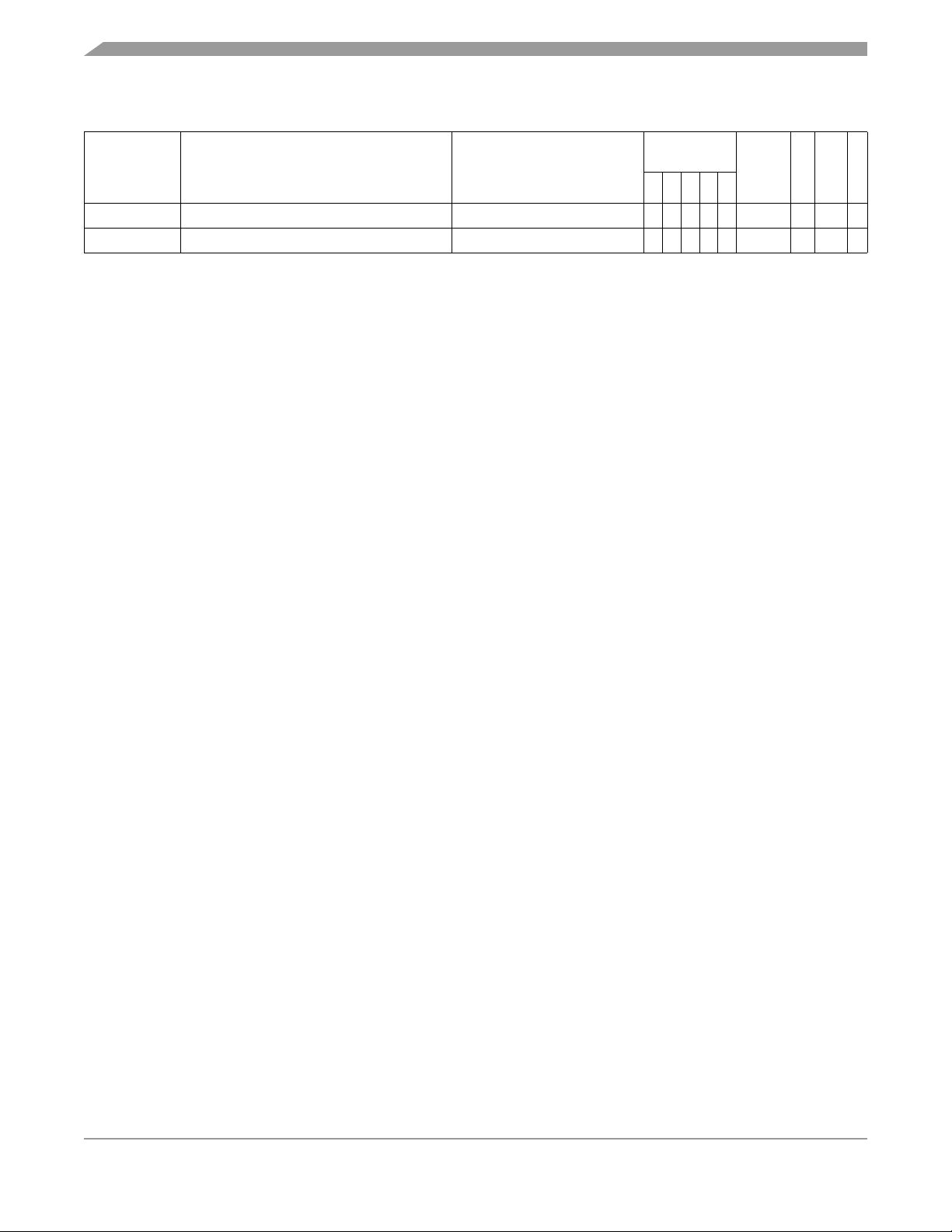
Instruction Set
Table 13-6. Instruction Set Summary (Sheet 6 of 6)
Source
Form
TXA Transfer Index Register to Accumulator A ← (X) ————— INH 9F 2
WAIT Stop CPU Clock and Enable Interrupts — 0 — — — INH 8F 2
A Accumulator opr Operand (one or two bytes)
C Carry/borrow flag PC Program counter
CCR Condition code register PCH Program counter high byte
dd Direct address of operand PCL Program counter low byte
dd rr Direct address of operand and relative offset of branch instruction REL Relative addressing mode
DIR Direct addressing mode rel Relative program counter offset byte
ee ff High and low bytes of offset in indexed, 16-bit offset addressing rr Relative program counter offset byte
EXT Extended addressing mode SP Stack pointer
ff Offset byte in indexed, 8-bit offset addressing X Index register
H Half-carry flag Z Zero flag
hh ll High and low bytes of operand address in extended addressing # Immediate value
I Interrupt mask ∧ Logical AND
ii Immediate operand byte ∨ Logical OR
IMM Immediate addressing mode ⊕ Logical EXCLUSIVE OR
INH Inherent addressing mode ( ) Contents of
IX Indexed, no offset addressing mode –( ) Negation (two’s complement)
IX1 Indexed, 8-bit offset addressing mode ← Loaded with
IX2 Indexed, 16-bit offset addressing mode ? If
M Memory location : Concatenated with
N Negative flag Set or cleared
n Any bit — Not affected
Operation Description
on CCR
HINZC
Mode
Address
Opcode
Operand
Effect
Cycles
13.5 Opcode Map
See Table 13-7.
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
82 Freescale Semiconductor
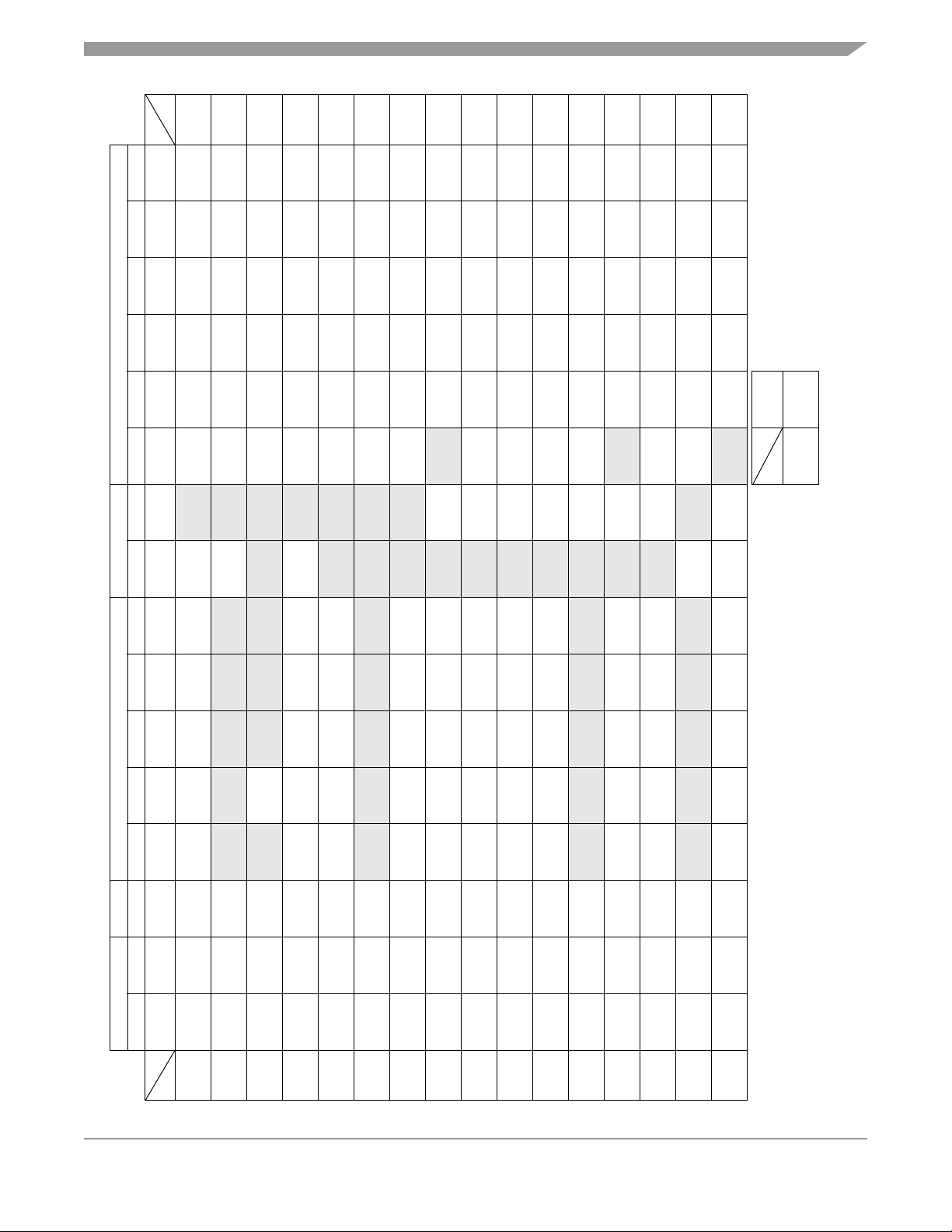
Opcode Map
LSB
0
1
2
3
4
5
6
7
8
9
A
B
C
D
MSB
3
3
3
3
3
3
4
3
3
3
3
3
5
2
F
E
4
3
SUB
4
SUB
5
SUB
4
SUB
3
SUB
2
SUB
9
RTI
5
CMP
1IX
4
CMP
2IX1
5
CMP
3IX2
4
CMP
3 EXT
3
CMP
2DIR
2
CMP
2IMM
6
RTS
1INH
SBC
1IX
4
SBC
2IX1
5
SBC
3IX2
4
SBC
3 EXT
3
SBC
2DIR
2
SBC
2IMM
1INH
CPX
1IX
4
CPX
2IX1
5
CPX
3IX2
4
CPX
3 EXT
3
CPX
2DIR
2
CPX
2IMM
10
SWI
5
AND
1IX
4
AND
2IX1
5
AND
3IX2
4
AND
3 EXT
3
AND
2DIR
2
AND
2IMM
1INH
5
BIT
1IX
4
BIT
2IX1
5
BIT
3IX2
4
BIT
3 EXT
3
BIT
2DIR
2
BIT
2IMM
LDA
1IX
4
LDA
2IX1
5
LDA
3IX2
4
LDA
3 EXT
3
LDA
2DIR
2
LDA
2IMM
5
STA
1IX
5
STA
2IX1
6
STA
3IX2
5
STA
3 EXT
4
STA
2DIR
2IMM
2
TA X
5
EOR
1IX
4
EOR
2IX1
5
EOR
3IX2
4
EOR
3 EXT
3
EOR
2DIR
2
EOR
2
CLC
1INH
5
ADC
1IX
4
ADC
2IX1
5
ADC
3IX2
4
ADC
3 EXT
3
ADC
2DIR
2
ADC
2IMM
2
SEC
1INH
5
ORA
1IX
4
ORA
2IX1
5
ORA
3IX2
4
ORA
3 EXT
3
ORA
2DIR
2
ORA
2IMM
2
CLI
1INH
5
ADD
1IX
4
ADD
2IX1
5
ADD
3IX2
4
ADD
3 EXT
3
ADD
2DIR
2
ADD
2IMM
2
SEI
1INH
JMP
1IX
3
JMP
2IX1
4
JMP
3IX2
3
JMP
3 EXT
2
JMP
2DIR
2IMM
2
RSP
1INH
5
JSR
1IX
6
JSR
2IX1
7
JSR
3IX2
6
JSR
3 EXT
5
JSR
2DIR
6
BSR
2
NOP
1INH
4
LDX
1IX
4
LDX
2IX1
5
LDX
3IX2
4
LDX
3 EXT
3
LDX
2DIR
2
LDX
2REL
1INH
2
STOP
STX
1IX
5
STX
2IX1
6
STX
3IX2
5
STX
3 EXT
4
STX
2DIR
2IMM
2
TXA
2
WAIT
1INH
5
1IX
2IX1
3IX2
3 EXT
0 MSB of Opcode in Hexadecimal
2DIR
MSB
LSB
1INH
1INH
Number of Cycles
Opcode Mnemonic
Number of Bytes/Addressing Mode
5
BRSET0
3DIR
Table 13-7. Opcode Map
DIR DIR REL DIR INH INH IX1 IX INH INH IMM DIR EXT IX2 IX1 IX
Bit Manipulation Branch Read-Modify-Write Control Register/Memory
MSB
NEG
1IX
6
NEG
2IX1
3
NEGX
1INH
3
NEGA
1INH
5
NEG
2DIR
3
BRA
2REL
5
BSET0
2DIR
5
0123456789ABCDEF
BRSET0
3DIR
0
LSB
3
5
5
BRN
2REL
BCLR0
2DIR
BRCLR0
3DIR
1
11
3
5
5
MUL
1INH
BHI
2REL
BSET1
2DIR
BRSET1
3DIR
2
6
3
3
5
3
5
5
COM
1IX
COM
2IX1
COMX
1INH
COMA
1INH
COM
2DIR
BLS
2REL
BCLR1
2DIR
BRCLR1
3DIR
3
6
3
3
5
3
5
5
LSR
1IX
LSR
2IX1
LSRX
1INH
LSRA
1INH
LSR
2DIR
BCC
2REL
BSET2
2DIR
BRSET2
3DIR
4
3
5
5
BCS/BLO
2REL
BCLR2
2DIR
BRCLR2
3DIR
5
6
3
3
5
3
5
5
ROR
1IX
ROR
2IX1
RORX
1INH
RORA
1INH
ROR
2DIR
BNE
2REL
BSET3
2DIR
BRSET3
3DIR
6
ASR
6
ASR
3
ASRX
3
ASRA
5
ASR
3
BEQ
5
BCLR3
5
BRCLR3
7
ASL/LSL
1IX
6
ASL/LSL
2IX1
3
ASLX/LSLX
1INH
3
ASLA/LSLA
1INH
5
ASL/LSL
2DIR
3
BHCC
2REL
5
BSET4
2DIR
5
BRSET4
3DIR
8
ROL
1IX
6
ROL
2IX1
3
ROLX
1INH
3
ROLA
1INH
5
ROL
2DIR
3
BHCS
2REL
5
BCLR4
2DIR
5
BRCLR4
3DIR
9
DEC
1IX
6
DEC
2IX1
3
DECX
1INH
3
DECA
1INH
5
DEC
2DIR
3
BPL
2REL
5
BSET5
2DIR
5
BRSET5
3DIR
A
1IX
2IX1
1INH
1INH
2DIR
3
BMI
2REL
5
BCLR5
2DIR
5
BRCLR5
3DIR
B
6
3
3
5
3
2REL
5
2DIR
5
3DIR
INC
1IX
INC
2IX1
INCX
1INH
INCA
1INH
INC
2DIR
BMC
2REL
BSET6
2DIR
BRSET6
3DIR
C
5
3
3
4
3
5
5
TST
1IX
TST
2IX1
TSTX
1INH
TSTA
1INH
TST
2DIR
BMS
2REL
BCLR6
2DIR
BRCLR6
3DIR
D
3
5
5
BIL
2REL
BSET7
2DIR
BRSET7
3DIR
E
6
3
3
5
3
5
5
CLR
1IX
CLR
2IX1
CLRX
1INH
CLRA
1INH
CLR
2DIR
BIH
2REL
BCLR7
2DIR
BRCLR7
3DIR
F
LSB of Opcode in Hexadecimal 0
INH = Inherent REL = Relative
IMM = Immediate IX = Indexed, No Offset
DIR = Direct IX1 = Indexed, 8-Bit Offset
EXT = Extended IX2 = Indexed, 16-Bit Offset
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 83
Instruction Set
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
84 Freescale Semiconductor
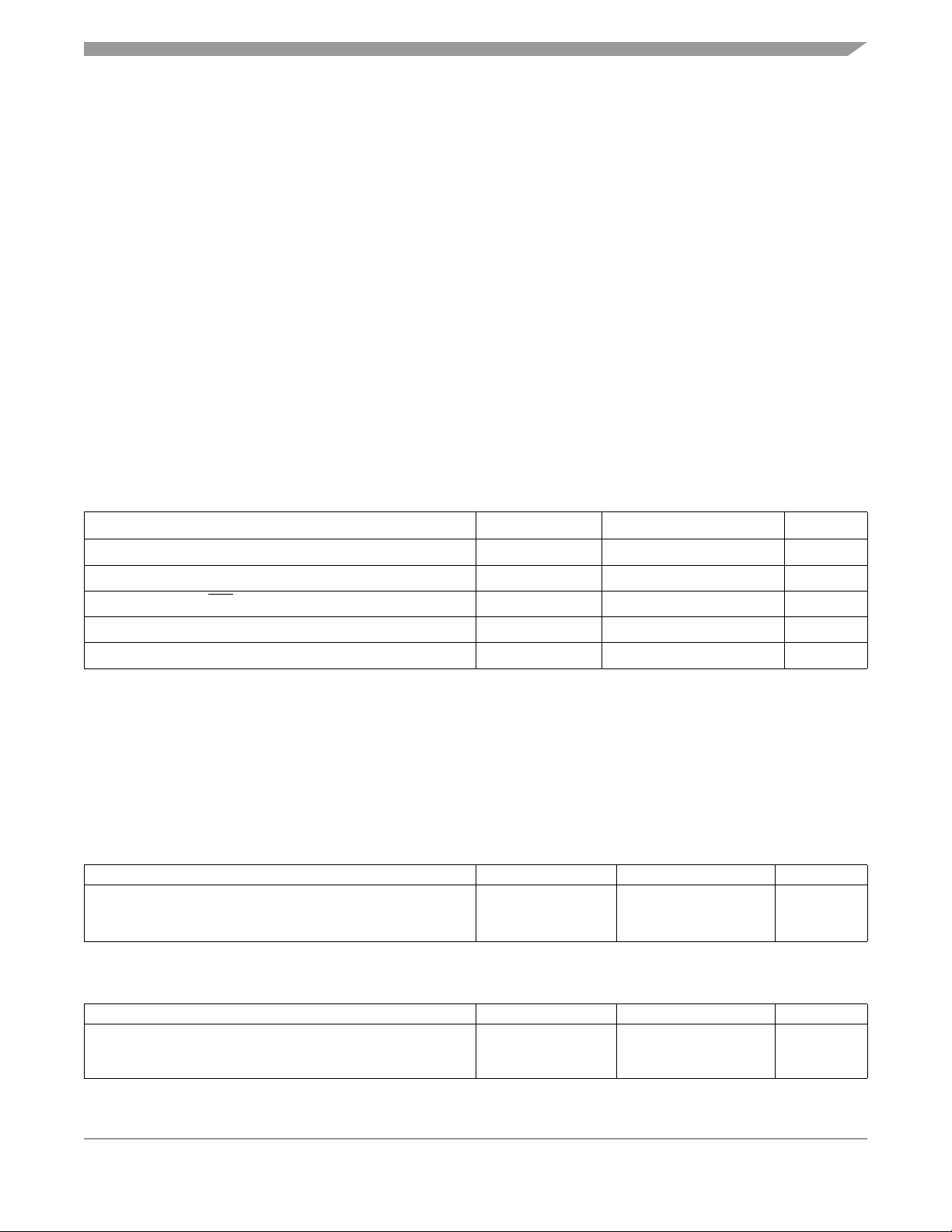
Chapter 14
Electrical Specifications
14.1 Introduction
This section contains the electrical and timing specifications.
14.2 Maximum Ratings
Maximum ratings are the extreme limits to which the MCU can be exposed without permanently damaging
it.
The MCU contains circuitry to protect the inputs against damage from high static voltages; however, do
not apply voltages higher than those shown in the table below. Keep V
V
≤ (VInor V
SS
) ≤ VDD. Connect unused inputs to the appropriate voltage level, either VSS or VDD.
Out
and V
In
within the range
Out
(1)
Rating
Supply voltage
Input voltage
Bootloader mode (IRQ
Current drain per pin excluding V
Storage temperature range
1. Voltages are referenced to VSS.
/VPP pin only) V
and V
DD
SS
This device is not guaranteed to operate properly at the maximum ratings.
Refer to 14.5 5.0-Volt DC Electrical Characteristics and
14.6 3.3-Volt DC Electrical Charactertistics for guaranteed operating
conditions.
14.3 Operating Temperature Range
Characteristic Symbol Value Unit
Operating temperature range
MC68HC705P6A (standard)
MC68HC705P6AC (extended)
NOTE
Symbol Value Unit
V
DD
V
In
In
I25mA
T
stg
T
A
–0.3 to +7.0 V
VSS –0.3 to VDD +0.3
VSS –0.3 to 2 x VDD +0.3
–65 to +150 °C
TL to T
H
0 to +70
–40 to +85
V
V
°C
14.4 Thermal Characteristics
Characteristic Symbol Value Unit
Thermal resistance
PDIP
SOIC
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 85
θ
JA
60
60
°C/W
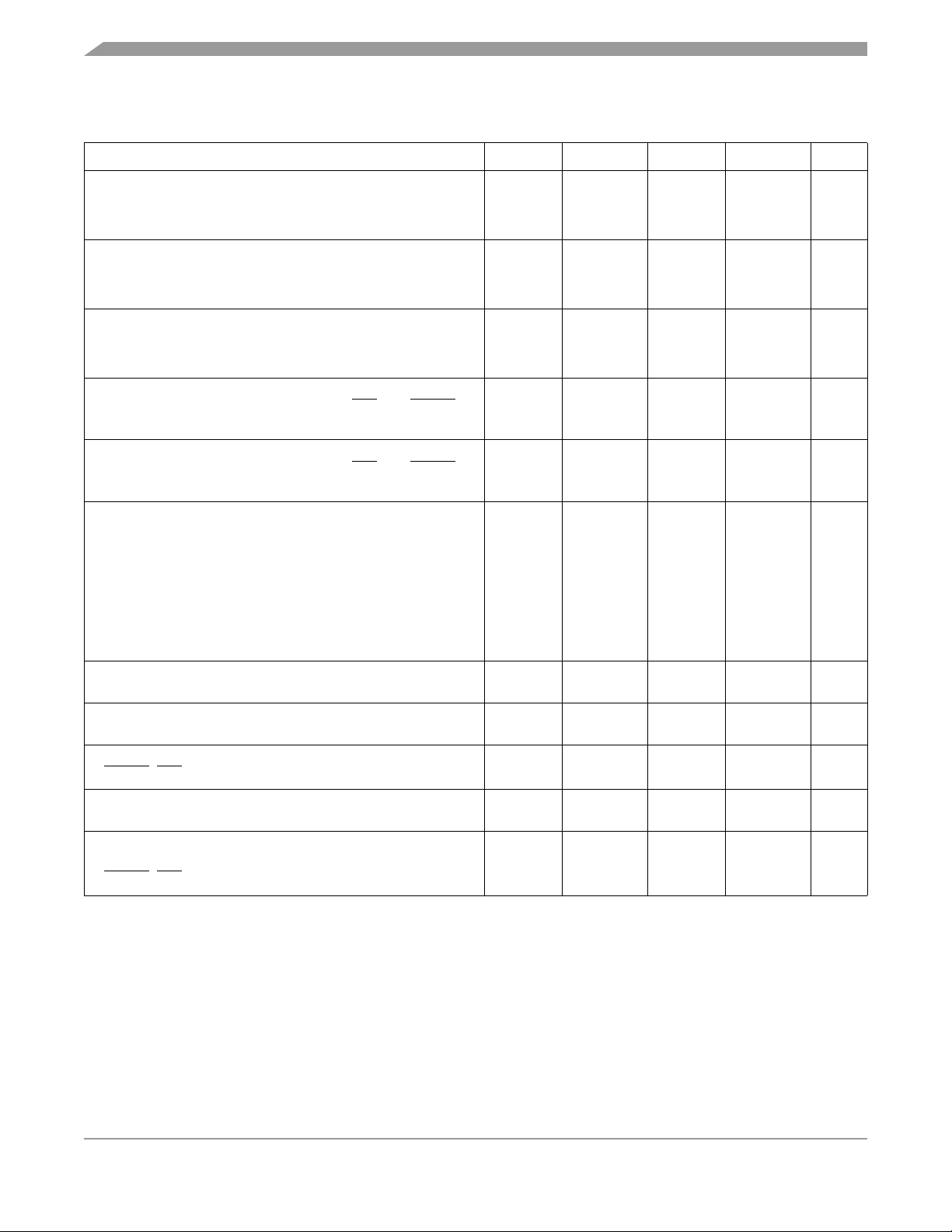
Electrical Specifications
14.5 5.0-Volt DC Electrical Characteristics
Characteristic
(1)
Output voltage
I
= 10.0 µA
Load
= –10.0 µA
I
Load
Output high voltage
(I
= –0.8 mA) PA0:7, PB5:7, PC2:7, PD5, TCMP
Load
(I
= –5.0 mA) PC0:1
Load
Output low voltage
= 1.6 mA) PA0:7, PB5:7, PC2:7, PD5, TCMP
(I
Load
(I
= 10 mA) PC0:1
Load
Input high voltage
PA0:7, PB5:7, PC0:7, PD5, TCAP/PD7, IRQ/VPP, RESET,
OSC1
Input low voltage
PA0:7, PB5:7, PC0:7, PD5, TCAP/PD7, IRQ
/VPP, RESET,
OSC1
Supply current
(3), (4)
Run
(5)
Wait
(A/D converter on)
(5)
(A/D converter off)
Wait
(6)
Stop
25°C
0°C to +70°C (standard)
–40°C to +85°C (extended)
I/O ports high-z leakage current
PA0:7, PB5:7, PC0:7, PD5, TCAP/PD7
A/D ports hi-z leakage current
PC3:7
Input current
, IRQ/VPP, OSC1, PD7/TCAP
RESET
Symbol Min
V
OL
V
OH
V
OH
V
OL
—
VDD –0.1
VDD –0.8
–0.8
V
DD
—
—
V
IH
V
IL
0.7 x V
V
SS
—
—
I
DD
—
—
—
—
I
I
OZ
I
IL
In
——±10.0 µA
——±1.0 µA
——±1.0 µA
DD
Typ
—
—
—
—
—
—
—
—
4.0
2.0
1.3
—
—
(2)
Max Unit
0.1
V
—
—
V
—
0.4
V
0.4
V
DD
0.2 x V
DD
7.0
4.0
2.0
2
30
50
100
V
V
mA
mA
mA
µA
µA
µA
Input pullup current
PA0:7 (with pullup enabled)
I
In
175 385 750 µA
Capaitance
Ports (as input or output)
, IRQ/V
RESET
PP
C
Out
C
In
—
—
—
—
12
pF
8
1. VDD = 5.0 Vdc ± 10%, VSS = 0 Vdc, TA = –40°C to +85°C, unless otherwise noted. All values shown refelect pre-silicon
estimates.
2. Typical values at midpoint of voltage range, 25°C only.
3. Run (Operating) I
from rail; no dc loads, less than 50 pF on all outputs, C
4. Wait, Stop I
5. Wait I
6. Stop I
DD
will be affected linearly by the OSC2 capacitance.
DD
to be measured with OSC1 = VSS.
DD
, Wait IDD: To be measured using external square wave clock source (f
DD
: All ports configured as inputs, VIL = 0.2 V, VIH = VDD –0.2 V.
= 20 pF on OSC2.
L
= 4.2 MHz), all inputs 0.2 V
osc
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
86 Freescale Semiconductor
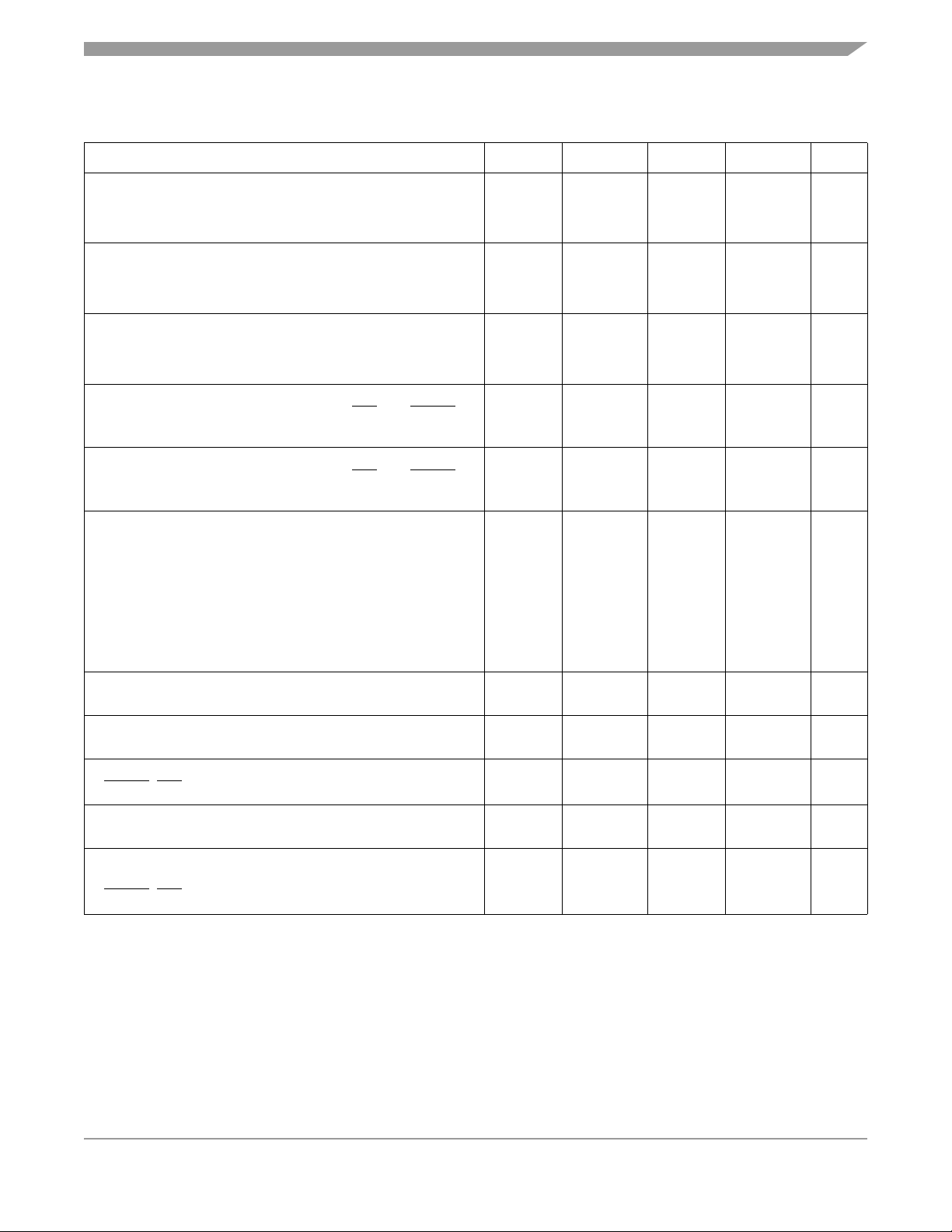
14.6 3.3-Volt DC Electrical Charactertistics
3.3-Volt DC Electrical Charactertistics
Characteristic
(1)
Output voltage
I
= 10.0 µA
Load
= –10.0 µA
I
Load
Output high voltage
(I
= –0.2 mA) PA0:7, PB5:7, PC2:7, PD5, TCMP
Load
(I
= –1.2 mA) PC0:1
Load
Output low voltage
= 0.4 mA) PA0:7, PB5:7, PC2:7, PD5, TCMP
(I
Load
(I
= 2.5 mA) PC0:1
Load
Input high voltage
PA0:7, PB5:7, PC0:7, PD5, TCAP/PD7, IRQ
OSC1
Input low voltage
PA0:7, PB5:7, PC0:7, PD5, TCAP/PD7, IRQ
OSC1
Supply current
(3), (4)
Run
(5)
(A/D converter on)
Wait
(5)
(A/D converter off)
Wait
(6)
Stop
25°C
0°C to +70°C (standard)
–40°C to +85°C (extended)
I/O ports high-z leakage current
PA0:7, PB5:7, PC0:7, PD5, TCAP/PD7
/VPP, RESET,
/VPP, RESET,
Symbol Min
V
OL
V
OH
V
OH
V
OL
—
VDD –0.1
VDD –0.3
–0.3
V
DD
—
—
V
IH
V
IL
0.7 x V
V
SS
—
—
I
DD
—
—
—
—
I
IL
——±10.0 µA
DD
Typ
—
—
—
—
—
—
—
—
1.8
1.0
0.6
—
—
(2)
Max Unit
0.1
V
—
—
V
—
0.3
V
0.3
V
DD
0.2 x V
DD
2.5
1.4
1.0
2
20
40
50
V
V
mA
mA
mA
µA
µA
µA
A/D ports hi-z leakage current
PC3:7
Input current
, IRQ/VPP, OSC1, PD7/TCAP
RESET
Input pullup current
PA0:7 (with pullup enabled)
I
OZ
I
I
——±1.0 µA
In
In
——±1.0 µA
75 175 350 µA
Capaitance
Ports (as input or output)
RESET, IRQ/V
PP
C
Out
C
In
—
—
—
—
12
pF
8
1. VDD = 3.3 Vdc ± 0.3 Vdc, VSS = 0 Vdc, TA = –40°C to +85°C, unless otherwise noted. All values shown reflect pre-silicon
estimates.
2. Typical values at midpoint of voltage range, 25°C only.
3. Run (Operating) I
from rail; no dc loads, less than 50 pF on all outputs, C
4. Wait, Stop I
5. Wait I
6. Stop I
DD
will be affected linearly by the OSC2 capacitance.
DD
to be measured with OSC1 = VSS.
DD
, Wait IDD: To be measured using external square wave clock source (f
DD
: All ports configured as inputs, VIL = 0.2 V, VIH = VDD –0.2 V.
= 20 pF on OSC2.
L
= 4.2 MHz), all inputs 0.2 V
osc
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 87
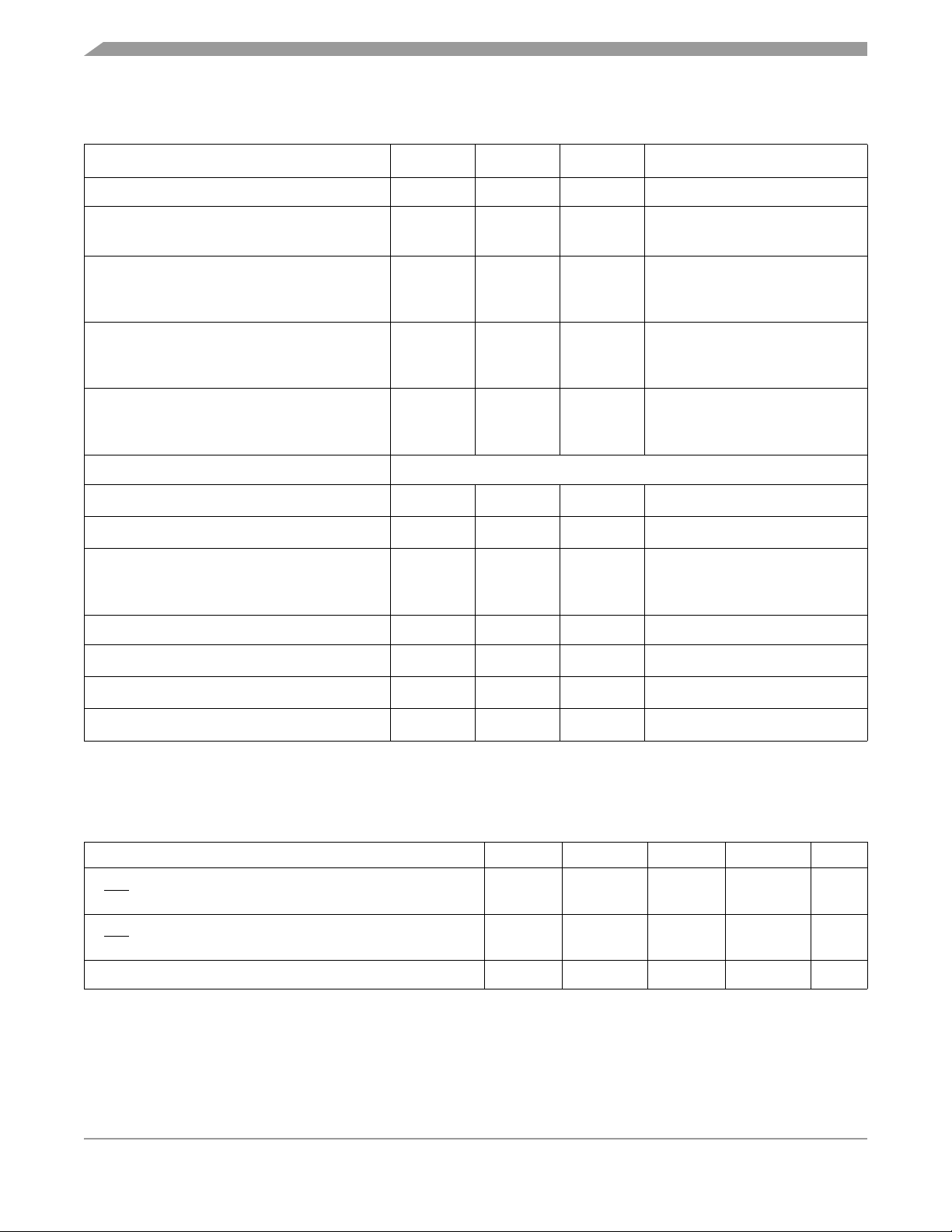
Electrical Specifications
14.7 A/D Converter Characteristics
Characteristic
(1)
Min Max Unit Comments
Resolution 8 8 Bits
Absolute accuacy
(V
DD
≥ V
REFH
> 4.0)
Conversion range
V
REFH
— ± 1 1/2 LSB Including quanitization
V
SS
V
SS
V
REFH
V
DD
V
A/D accuracy may decrease
proportionately as V
reduced below 4.0
Input leakage
AD0, AD1, AD2, AD3
V
REFH
—
—
± 1
± 1
µA
Conversion time
MCU external oscillator
Internal RC oscillator
—
—
32
32
t
cyc
Includes sampling time
µs
Monotonicity Inherent (within total error)
= 0 V
Zero input reading 00 01 Hex
Full-scale reading FE FF Hex
V
in
= V
V
in
REFH
Sample time
MCU external oscillator
Internal RC oscillator
—
—
12
12
t
cyc
µs
REFH
is
Input capacitance — 12 pF
Analog input voltage
V
SS
V
REFH
A/D on current stabilization time — 100 µs
A/D ports hi-z leakage current (PC3:7) — ± 1 µA
1. VDD = 5.0 Vdc ± 10%, VSS = 0 Vdc, TA = –40°C to +85°C, unless otherwise noted.
14.8 EPROM Programming Characteristics
Characteristic Symbol Min Typ Max Unit
Programming voltage
IRQ
/V
PP
Programming current
IRQ
/V
PP
Programming time per byte
V
I
PP
t
EPGM
PP
V
t
ADON
I
OZ
16.25 16.5 16.75 V
—5.010mA
4——ms
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
88 Freescale Semiconductor

SIOP Timing
14.9 SIOP Timing
Number Characteristic Symbol Min Max Unit
Operating frequency
Master
Slave
Cycle time
1
Master
Slave
2 SCK low time
3 SDO data valid time
4 SDO hold time
5 SDI setup time
6 SDI hold time
SCK
f
op(m)
f
op(s)
t
cyc(m)
t
cyc(s)
t
cyc
t
v
t
ho
t
s
t
h
t
1
0.25
dc
4.0
—
0.25
0.25
4.0
4.0
932 — ns
— 200 ns
0—ns
100 — ns
100 — ns
t
2
t
5
t
6
f
t
op
cyc
SDI
SDO
BIT 0
t
3
t
4
BIT 0 BIT 1 ... 6 BIT 7
BIT 1 ... 6 BIT 7
Figure 14-1. SIOP Timing Diagram
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 89

Electrical Specifications
14.10 Control Timing
Characteristic
(1)
Symbol Min Max Unit
Frequency of operation
Crystal option
f
OSC
External clock option
Internal operating frequency
Crystal (f
External clock (f
Cycle time
Crystal oscillator startup time
Stop mode recovery startup time (crystal oscillator)
RESET
Interrupt pulse width low (edge-triggered)
Interrupt pulse period
OSC1 pulse width
A/D On current stabilization time
÷ 2)
OSC
pulse width
OSC
÷ 2)
(2)
t
t
OXOV
t
t
OH
t
ADON
f
OP
CYC
ILCH
t
RL
t
ILIH
t
ILIL
, t
1. VDD = 5.0 Vdc ± 10%, VSS = 0 Vdc, TA = –40°C to +125°C, unless otherwise noted
2. The minimum period, t
plus 19 t
CYC
.
, should not be less than the number of cycle times it takes to execute the interrupt service routine
ILIL
OL
—
DC
—
DC
4.2
4.2
2.1
2.1
MHz
MHz
476 — ns
—100ms
—100ms
1.5 —
t
CYC
125 — ns
Note 2 —
t
CYC
200 — ns
Q100µs
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
90 Freescale Semiconductor

NEW PC
OP
Control Timing
CODE
1FFE1FFE1FFE 1FFE NEW PC1FFF
NEW PC NEW PC
PCH PCL
CODEPCLPCH
NOTE 3
RL
t
initiates the reset sequence.
cyc
t
cyc
(2)
OSC1
4064 t
INTERNAL
PROCESSOR
(1)
CLOCK
VDDR
t
THRESHOLD (1-2 V TYPICAL)
DD
V
DD
V
INTERNAL
1FFE 1FFF
(1)
ADDRESS
BUS
NEW NEW OP
INTERNAL
(1)
DATA
BUS
RESET
1. Internal timing signal and bus information are not available externally.
2. OSC1 line is not meant to represent frequency. It is only used to represent time.
3. The next rising edge of the internal clock following the rising edge of RESET
Notes:
Figure 14-2. Power-On Reset and External Reset Timing Diagram
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 91

Electrical Specifications
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
92 Freescale Semiconductor

Chapter 15
Mechanical Specifications
15.1 Introduction
The MC68HC705P6A is available in either a 28-pin plastic dual in-line (PDIP) or a 28-pin small outline
integrated circuit (SOIC) package.
15.2 Plastic Dual In-Line Package (Case 710)
NOTES:
1. POSITIONAL TOLERANCE OF LEADS (D),
SHALL BE WITHIN 0.25mm (0.010) AT
MAXIMUM MATERIAL CONDITION, IN
RELATION TO SEATING PLANE AND
1528
B
114
A
C
N
HG
F
D
SEATING
PLANE
K
M
L
J
EACH OTHER.
2. DIMENSION L TO CENTER OF LEADS
WHEN FORMED PARALLEL.
3. DIMENSION B DOES NOT INCLUDE
MOLD FLASH.
MILLIMETERS INCHES
MIN MINMAX MAX
DIM
36.45
37.21
A
13.72
B
3.94
C
0.36
D
1.02
F
G
2.54 BSC
1.65
H
0.20
J
2.92
K
L
15.24 BSC
0°
M
0.51
N
14.22
5.08
0.56
1.52
2.16
0.38
3.43
15°
1.02
1.435
0.540
0.155
0.014
0.040
0.100 BSC
0.065
0.008
0.115
0.600 BSC
0°
0.020
1.465
0.560
0.200
0.022
0.060
0.085
0.015
0.135
15°
0.040
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 93

Mechanical Specifications
15.3 Small Outline Integrated Circuit Package (Case 751F)
-A-
1528
-B-
114
28X D
0.010 (0.25) TA B
M
S S
-T-
26X G
K
14X P
M M
R
X 45°
0.010 (0.25)
C
-T-
SEATING
PLANE
B
M
J
NOTES:
1. DIMENSIONING AND TOLERANCING PER
2. CONTROLLING DIMENSION: MILLIMETER.
3. DIMENSION A AND B DO NOT INCLUDE MOLD
4. MAXIMUM MOLD PROTRUSION 0.15
5. DIMENSION D DOES NOT INCLUDE
F
ANSI Y14.5M, 1982.
PROTRUSION.
(0.006) PER SIDE.
DAMBAR PROTRUSION. ALLOWABLE
DAMBAR PROTRUSION SHALL BE 0.13
(0.005) TOTAL IN EXCESS OF D
DIMENSION AT MAXIMUM MATERIAL
CONDITION.
MILLIMETERS INCHES
MIN MINMAX MAX
DIM
A
17.80
B
7.40
C
2.35
D
0.35
F
0.41
1.27 BSC 0.050 BSC
G
J
0.23
K
0.13
M
0°
P
10.05
R
0.25
18.05
7.60
2.65
0.49
0.90
0.32
0.29
10.55
0.75
0.701
0.292
0.093
0.014
0.016
0.009
0.005
0°
8°
0.395
0.010
0.711
0.299
0.104
0.019
0.035
0.013
0.011
0.415
0.029
8°
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
94 Freescale Semiconductor

Chapter 16
Ordering Information
16.1 Introduction
This section contains ordering information for the available package types.
16.2 MC Order Numbers
The following table shows the MC order numbers for the available package types.
MC Order Number
MC68HC705P6ACP
MC68HC705P6ACDW
1. P = Plastic dual in-line package
2. DW = Small outline integrated circuit (SOIC) package
(1)
(extended)
(2)
(extended)
Operating
Temperature Range
–40°C to 85°C
–40°C to 85°C
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
Freescale Semiconductor 95

Ordering Information
MC68HC705P6A Advance Information Data Sheet, Rev. 2.1
96 Freescale Semiconductor

blank

How to Reach Us:
Home Page:
www.freescale.com
E-mail:
support@freescale.com
USA/Europe or Locations Not Listed:
Freescale Semiconductor
Technical Information Center, CH370
1300 N. Alma School Road
Chandler, Arizona 85224
+1-800-521-6274 or +1-480-768-2130
support@freescale.com
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
support@freescale.com
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064
Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate
Tai Po, N.T., Hong Kong
+800 2666 8080
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
Information in this document is provided solely to enable system and software
implementers to use Freescale Semiconductor products. There are no express or
implied copyright licenses granted hereunder to design or fabricate any integrated
circuits or integrated circuits base d on the information in this document.
Freescale Semiconductor reserves the right to make changes without further notice to
any products herein. Freescale Semiconductor makes no warranty, representation or
guarantee regarding the suitability of its products for any particular purpose, nor does
Freescale Semiconductor assume any liability arising out of the application or use of any
product or circuit, and specifically disclaims any and all liability, including without
limitation consequential or incidental damages. “Typical” parameters that may be
provided in Freescale Semiconductor data sheet s and/or specifications can and do vary
in different applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer application by
customer’s technical experts. Freescale Semiconductor does not convey any licen se
under its patent rights nor the rights of others. Freescale Semiconductor products are
not designed, intended, or authorized for use as components in systems intended for
surgical implant into the body, or other applications intended to support or sustain life,
or for any other application in which the failure of the Freescale Semiconduct or product
could create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended or
unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and
its officers, employees, subsidiaries, affiliates, and distributors harmless against all
claims, costs, damages, and expenses, and reasonable attorney fees arising out of,
directly or indirectly, any claim of personal injury or death associated with such
unintended or unauthorized use, even if such claim alleges that Freescale
Semiconductor was negligent regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.
All other product or service names are the property of their respective owners.
© Freescale Semiconductor, Inc. 2005. All rights reserved.
MC68HC705P6A
Rev. 2.1, 9/2005
 Loading...
Loading...