

Freescale Semiconductor
Advance Information
Dual Gauge Driver with
Document Number: MC33976
Rev 4.0, 1/2007
Configurable Response Time
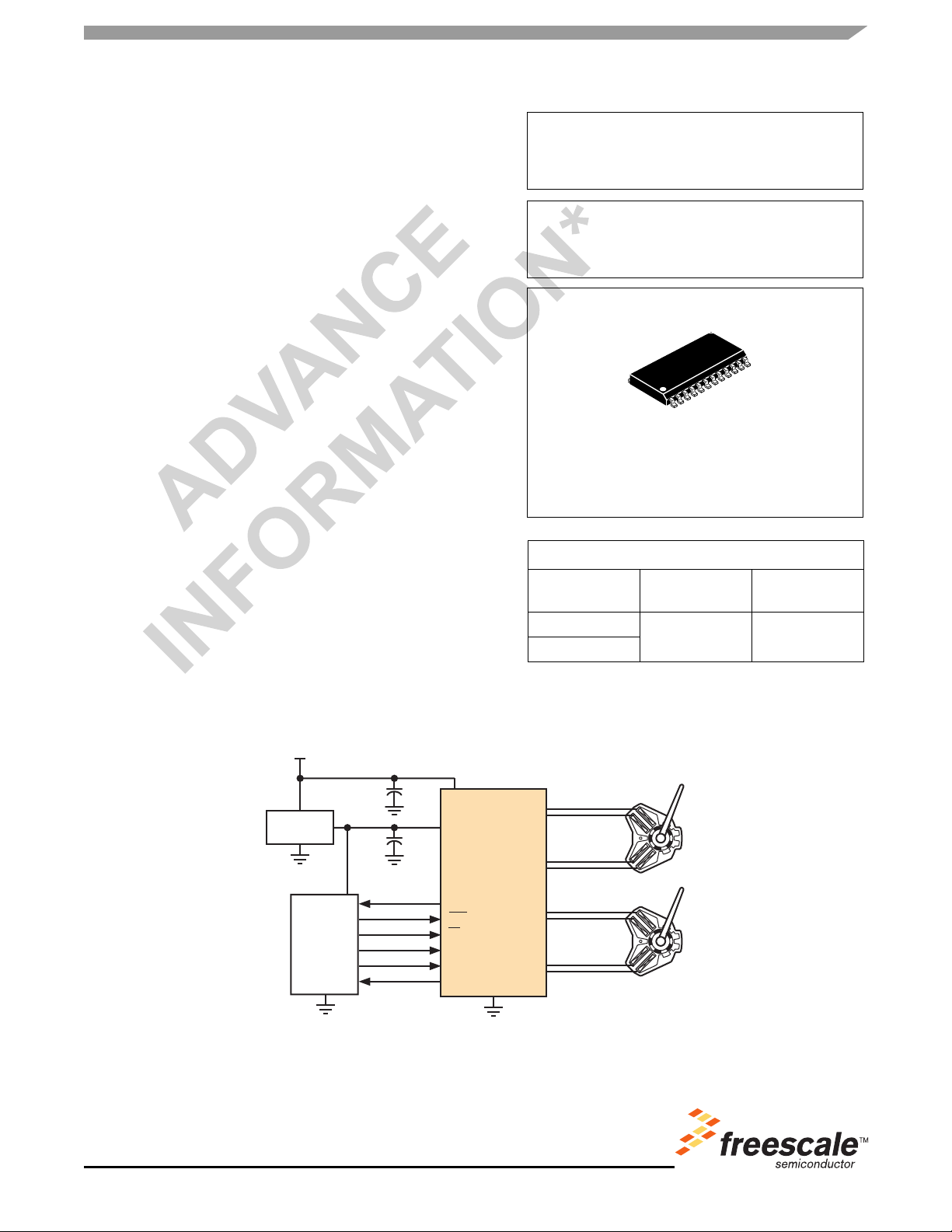
The 33976 is a single-packaged, Serial Peripheral Interface (SPI)
controlled, dual step motor gauge driver integrated circuit (IC). This
monolithic IC consists of four dual output H-Bridge coil drivers and the
associated control logic. Each pair of H-Bridge dri ve rs is used to
automatically control the speed, direction, and magnitude of current
through the two coils of a two-phase instrumentation step motor,
similar to an MMT-licensed AFIC
The 33976 is ideal for use in automotive instrumentation systems
requiring distributed and flexible step motor gauge driving. The
device also eases the transition to step motors from air core motors
by emulating the air core pointer movement with little additional
processor bandwidth utilization.
Features
•MMT-Licensed Two-Phase Step Motor Compatible
•Switec MS-X15.xxx Step Motor Compatible
•Minimal Processor Overhead Required
•Fully Integrated Pointer Movement and Position State Machine
with Channel-Independent Configurable Pointer Movement
•4096 Possible Steady State Pointer Positions
•340° Maximum Pointer Sweep
•Maximum Acceleration of 4500°/s2
•Maximum Pointer Velocity of 400°/s
•Analog Microstepping (12 Steps/Degree of Pointer Movement)
•Pointer Calibration and Return to Zero (RTZ)
•SPI-Controlled 16-Bit Word
•Calibratable Internal Clock
•Low Sleep Mode Current
•Pb-Free Packaging Designated by Suffix Code EG
6405 or Switec MS-X15.xxx motor.
33976
CONFIGURABLE DUAL GAUGE DRIVER
DW SUFFIX
EG SUFFIX (PB-FREE)
98ASB42344B
24-PIN SOICW
ORDERING INFORMATION
Device
MC33976DW/R2
MCZ33976EG/R2
Temperature
Range (T
- 40°C to 125°C 24 SOICW
)
A
Package
V
PWR
33976
V
5.0 V
Regulator
DD
MCU
Figure 1. 33976 Simplified Application Diagram
* This document contains certain information on a new product.
Specifications and information herein are subject to change without notice.
© Freescale Semiconductor, Inc., 2007. All rights reserved.
VPWD
VDD
RTZ
RST
CS
SCLK
SI
SO
SIN0+
SIN0-
Motor 0
COS0+
COS0-
SIN1+
SIN1-
Motor 1
COS1+
COS1-
GND
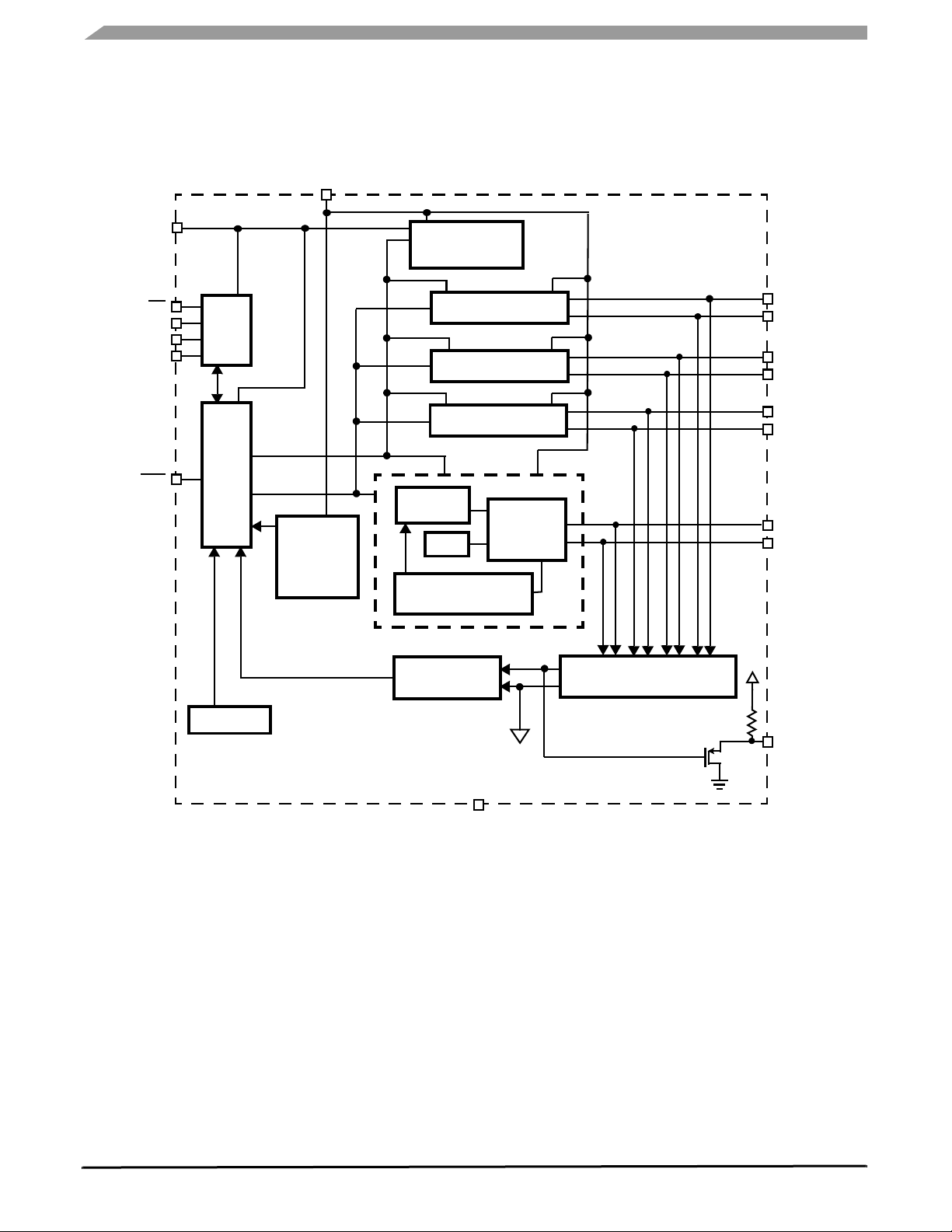
INTERNAL BLOCK DIAGRAM
INTERNAL BLOCK DIAGRAM
VPWR
VDD
CS
SCLK
SO
RST
INTERNAL
REGULATOR
COS0
SPI
SI
LOGIC
STATE
MACHINE
UNDER
-
AND
OVERVOLTAGE
DETECT
ILIM
OVERTEMPERATURE
DETECT
SIGMA-DELTA
ADC
SIN0
COS1
H-BRIDGE
AND
CONTROL
SIN1
MULTIPLEXER
COS0+
COS0-
SIN0+
SIN0-
COS1+
COS1-
SIN1+
SIN1-
VDD
OSCILLATOR
AGND
GND (8)
RTZ
Figure 2. 33976 Simplified Internal Block Diagram
33976
Analog Integrated Circuit Device Data
2 Freescale Semiconductor
PIN CONNECTIONS
PIN CONNECTIONS
COS0+
COS0-
SIN0+
SIN0-
GND
GND
GND
GND
SCLK
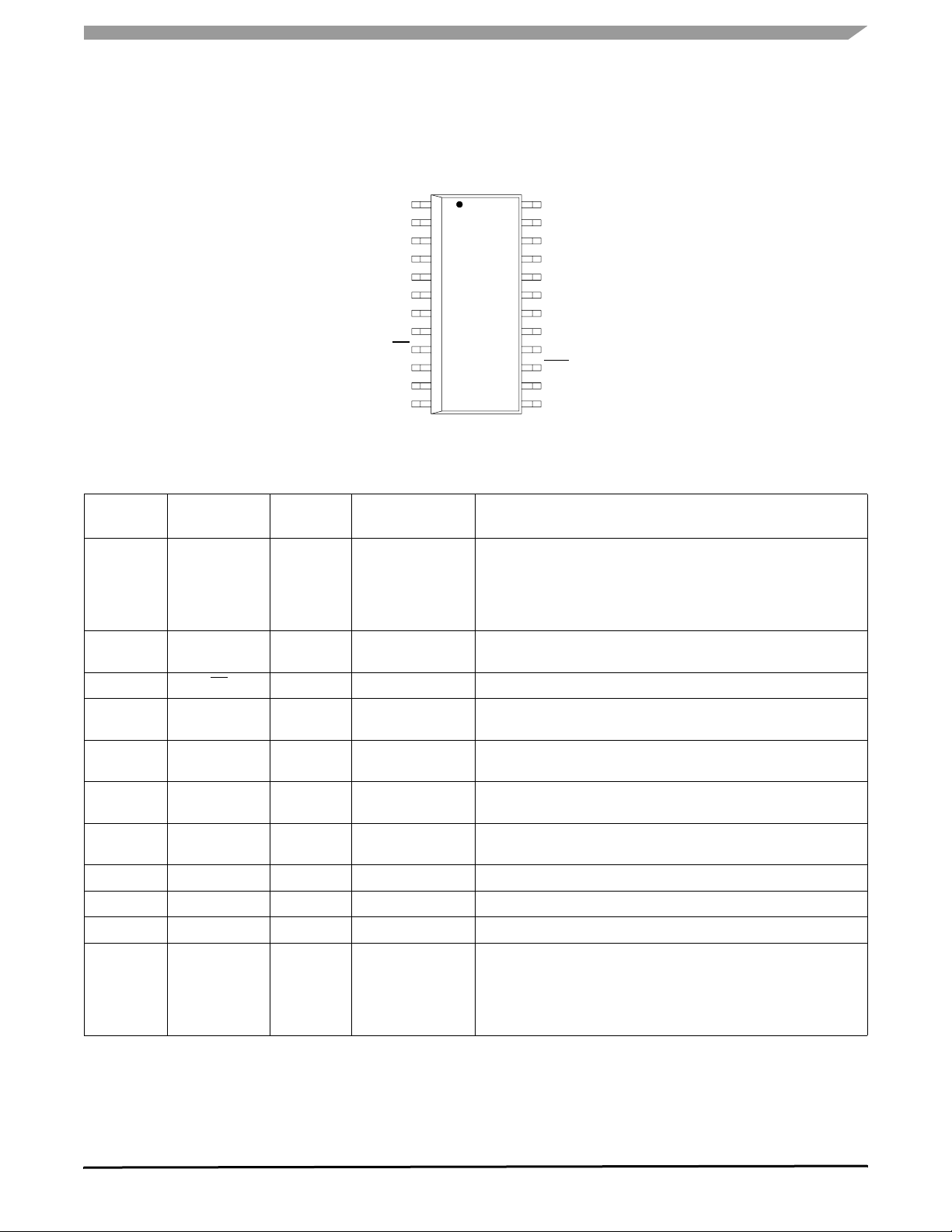
Figure 3. 33976 Pin Connections
Table 1. 33976 Pin Definitions
Pin
Number
1
2
3
4
5 – 8,
17–
20
9 CS Input Chip Select
10 SCLK Input Serial Clock
11 SO Output Serial Output
12 SI Input Serial Input
13 RTZ Output Multiplexed Output
14 VDD Input Voltage
15 RST Input Reset
16 VPWR Input Battery Voltage
21
22
23
24
Pin
Name
(MS Motor Pin #)
Pin
Function
Output H-Bridge Outputs 0
COS0+ (MS #4)
COS0
− (MS #3)
SIN0+(MS #1)
SIN0
− (MS #2)
GND Ground Ground
(MS Motor Pin #)
Output H-Bridge Outputs 1
SIN1− (MS #2)
SIN1+
(MS #1)
COS1
− (MS #3)
COS1+
(MS #4)
Formal Name Definition
CS
SO
1
2
3
4
5
6
7
8
9
10
11
12
SI
24
COS1+
23
COS1-
22
SIN1+
21
SIN1-
20
GND
19
GND
18
GND
17
GND
16
PWR
V
15
RST
14
VDD
13
RTZ
Each pin is the output pin of a half bridge, designed to source or sink
current.
These pins serve as the ground for the source of the low-side output
transistors as well as the logic portion of the device.
This pin is connected to a chip select output of a LSI IC.
This pin is connected to the SCLK pin of the master device and acts
as a bit clock for the SPI port.
This pin is connected to the SPI Serial Data Input pin of the master
device or to the SI pin of the next device in a daisy chain.
This pin is connected to the SPI Serial Data Output pin of the master
device from which it receives output command data.
This is a multiplexed output pin for the non-driven coil, during a Return
to Zero (RTZ) event.
This SPI and logic power supply input will work with 5.0 V supplies.
This input has an internal active pull-up.
Power supply.
Each of these pins is the output pin of a half bridge, designed to
source or sink current.
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 3
ELECTRICAL CHARACTERISTICS
MAXIMUM RATINGS
ELECTRICAL CHARACTERISTICS
MAXIMUM RATINGS
Table 2. Maximum Ratings
All voltages are with respect to ground unless otherwise noted. Exceeding these ratings may cause a malfunction or
permanent damage to the device.
Rating Symbol Value Unit
Power Supply Voltage
Steady State
Input Pin Voltage
SIN +/- COS +/- Continuous Per Output Current
(1)
(2)
Storage Temperature
Operating Junction Temperature
Thermal Resistance
Junction to Ambient
Junction to Lead
ESD Voltage
(3)
Human Body Model
Machine Model
Peak Package Reflow Temperature During Reflow
(4), (5)
V
PWR(SUS)
V
IN
I
OUTMAX
T
STG
T
R
θJA
R
θJL
V
ESD1
V
ESD2
T
PPRT
V
-0.3 to 41
-0.3 to 7.0 V
40 mA
-55 to 150 °C
J
-40 to 150 °C
°C/W
60
20
V
±2000
±200
Note 5
°C
Notes
1. Exceeding voltage limits on Input pins may cause permanent damage to the device.
2. Output continuous output rating so long as maximum junction temperature is not exceeded. Operation at 125°C ambient temperature will
require maximum output current computation using package thermal resistances.
3. ESD1 testing is performed in accordance with the Human Body Model (C
accordance with the Machine Model (C
= 200 pF, R
ZAP
ZAP
= 0 Ω).
= 100 pF, R
ZAP
= 1500 Ω), ESD2 testing is performed in
ZAP
4. Pin soldering temperature limit is for 10 seconds maximum duration. Not designed for immersion soldering. Exceeding these limits may
cause malfunction or permanent damage to the device.
5. Freescale’s Package Reflow capability meets Pb-free requirements for JEDEC standard J-STD-020C. For Peak Package Reflow
Temperature and Moisture Sensitivity Levels (MSL),
Go to www.freescale.com, search by part number [e.g. remove prefixes/suffixes and enter the core ID to view all orderable parts. (i.e.
MC33xxxD enter 33xxx), and review parametrics.
33976
Analog Integrated Circuit Device Data
4 Freescale Semiconductor
STATIC ELECTRICAL CHARACTERISTICS
ELECTRICAL CHARACTERISTICS
STATIC ELECTRICAL CHARACTERISTICS
Table 3. Static Electrical Characteristics
Characteristics noted under conditions 4.75 V ≤ VDD ≤ 5.25 V, - 40°C ≤ T
Typical values noted reflect the approximate parameter means at TA = 25°C under nominal conditions unless otherwise noted.
Characteristic Symbol Min Typ Max Unit
POWER INPUT
≤ 150°C, GND = 0 V unless otherwise noted.
J
Supply Voltage Range
Fully Operational
Limited Operational
V
Supply Current
PWR
(6), (7)
Gauge 1 and 2 Outputs ON, No Output Loads
V
Supply Current (All Outputs Disabled)
PWR
Reset = Logic [0], VDD = 5.0 V
Reset = Logic [0], VDD = 0 V
Overvoltage Detection Level
Undervoltage Detection Level
(8)
(9)
Logic Supply Voltage Range (5.0 V Nominal Supply)
Under VDD Logic Reset
VDD Supply Current
Sleep: Reset Logic [0]
Outputs Enabled
POWER OUTPUTS
Microstep Output (Measured Across Coil Outputs)
SIN0,1, ± (COS0,1, ±) (refer to Table 1)
R
= 200 Ω, PE6 = 0
OUT
Steps 6, 18 (0, 12)
Steps 5, 7, 17, 19 (1, 11, 13, 23)
Steps 4, 8, 16, 20 (2, 10, 14, 22)
Steps 3, 9, 15, 21 (3, 9, 15, 21)
Steps 2, 10, 14, 22 (4, 8,16, 20)
Steps 1, 11, 13, 23 (5, 7, 17, 19)
Steps 0, 12 (6, 18)
V
PWR
I
PWR(ON)
I
PWSLP1
I
PWRSLP2
V
PWROV
V
PWRUV
V
DD
V
DDUV
I
DD(OFF)
I
DD(ON)
V
ST6
V
ST5
V
ST4
V
ST3
V
ST2
V
ST1
V
ST0
6.5
4.0
–
–
26
26
– 4.0 6.0
–
–
42
15
60
25
26 32 38 V
5.0 5.6 6.2 V
4.5 5.0 5.5 V
– – 4.5 V
–
–
4.82
0.94 V
ST6
0.84 V
ST6
0.68 V
ST6
0.47 V
ST6
0.23 VST6
-0.1
40
1.0
5.3
0.97 V
0.87 V
0.71 V
0.50 V
0.26 V
65
1.8
6.0
ST6
ST6
ST6
ST6
ST6
0
1.0 V
0.96 V
0.8 V
0.57 V
0.31 V
0.1
ST6
ST6
ST6
ST6
ST6
V
mA
µA
µA
mA
V
Notes
6. Outputs and logic remain active; however, the larger coil voltage levels may be clipped. The reductio n in drive voltage may result in a
loss of position control.
7. The logic will reset at some level below the specified Limited Operational minimum.
8. Outputs will disable and must be re-enabled via the PECCR command.
9. Outputs remain active; however, the reduction in drive voltage may result in a loss of position control.
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 5
ELECTRICAL CHARACTERISTICS
STATIC ELECTRICAL CHARACTERISTICS
Table 3. Static Electrical Characteristics (continued)
Characteristics noted under conditions 4.75 V ≤ VDD ≤ 5.25 V, - 40°C ≤ T
≤ 150°C, GND = 0 V unless otherwise noted.
J
Typical values noted reflect the approximate parameter means at TA = 25°C under nominal conditions unless otherwise noted.
Characteristic Symbol Min Typ Max Unit
POWER OUTPUTS (CONTINUED)
Full Step Active Output (Measured Across Coil Outputs)
SIN0, 1, ± (COS0, 1, ±) (see Figure 9, page 26)
Steps 1, 3 (0, 2)
Microstep, Full Step Output
(Measured from Coil Low Side to Ground)
SIN0, 1, ± (COS0, 1, ±), I
Output Flyback Clamp
(11)
OUT
= 30 mA
Output Current Limit (Output = Vst6)
Overtemperature Shutdown
Overtemperature Hysteresis
(10)
(11)
CONTROL I/O
Input Logic High Voltage
Input Logic Low Voltage
Input Logic Voltage Hysteresis
(12)
(12)
(10)
Input Logic Pull Down Current (SI, SCLK)
Input Logic Pull-Up Current (CS, RST)
SO High-State Output Voltage (IOH = 1.0 mA)
SO Low-State Output Voltage (IOL = -1.6 mA)
SO Tri-State Leakage Current (CS ≥ 3.5 V)
Input Capacitance
SO Tri-State Capacitance
(13)
(13)
V
FS
V
LS
V
FB
I
LIM
OT
OT
HYST
V
V
V
IN(HYST)
I
DWN
I
UP
V
SOH
V
SOL
I
SOLK
C
C
SO
V
4.9 5.3 6.0
V
0 0.1 0.3
– V
+ 0.5 V
ST6
+ 1.0 V
ST6
40 100 170 mA
SD
155 – 180 °C
8.0 – 16 °C
IH
IL
2.0 – – V
– – 0.8 V
– 100 – mV
3.0 – 20 µA
5.0 – 20 µA
0.8 V
DD
– – V
– 0.2 0.4 V
-5.0 0 5.0 µA
IN
– 4.0 12 pF
– – 20 pF
ANALOG TO DIGITAL CONVERTER (RTZ ACCUMULATOR COUNT)
ADC Gain
(10), (14)
G
ADC
100 188 270 Counts/
V/ms
Notes
10. This parameter is guaranteed by design, but it is not production tested.
11. Not 100 percent tested.
12. VDD = 5.0 V.
13. Capacitance not measured. This parameter is guaranteed by design, but it is not production tested.
14. Reference RTZ Accumulator (Typical) on page 23
33976
Analog Integrated Circuit Device Data
6 Freescale Semiconductor
DYNAMIC ELECTRICAL CHARACTERISTICS
ELECTRICAL CHARACTERISTICS
DYNAMIC ELECTRICAL CHARACTERISTICS
Table 4. Dynamic Electrical Characteristics
Characteristics noted under conditions 4.75 V ≤ VDD ≤ 5.25 V, - 40°C ≤ T
Typical values noted reflect the approximate parameter means at TA = 25°C under nominal conditions unless otherwise noted.
Characteristic Symbol Min Typ Max Units
POWER OUTPUT AND CLOCK TIMINGS
≤ 150°C, GND = 0 V unless otherwise noted.
J
SIN0,1, ± (COS0,1, ±) Output Turn ON Delay Time
(Time from Rising CS Enabling
Outputs to Steady State Coil Voltages and Currents)
SIN0,1, ± (COS0,1, ±) Output Turn OFF Delay Time (Time from Rising CS
Disables Outputs to Steady State Coil Voltages and Currents)
(15)
(15)
Uncalibrated Oscillator Cycle Time
Calibrated Oscillator Cycle Time
Calibration Pulse = 8.0 µs, PECCR D4 = Logic [0]
Calibration Pulse = 8.0 µs, PECCR D4 = Logic [1]
Maximum Pointer Speed
Maximum Pointer Acceleration
(16)
(16)
t
DLY (ON)
t
DLY (OFF)
t
CLU
t
CLC
V
MAX
A
MAX
1.0
– –
– – 1.0
0.65 1.0 1.7 µs
1.0
0.9
1.1
1.0
1.2
1.1
– – 400 °/s
– – 4500 °/s
Notes
15. Maximum specified time for the 33976 is the minimum guaranteed time needed from the microcontroller.
16. The minimum and maximum value will vary proportionally to the internal clock tolerance. These numbers are based on an ideally
calibrated clock frequency of 1.0
MHz. These are not 100 percent tested.
ms
ms
µs
2
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 7
ELECTRICAL CHARACTERISTICS
DYNAMIC ELECTRICAL CHARACTERISTICS
Table 4. Dynamic Electrical Characteristics (continued)
Characteristics noted under conditions 4.75 V ≤ VDD ≤ 5.25 V, - 40°C ≤ T
≤ 150°C, GND = 0 V unless otherwise noted.
J
Typical values noted reflect the approximate parameter means at TA = 25°C under nominal conditions unless otherwise noted.
Characteristic Symbol Min Typ Max Units
SPI INTERFACE TIMING
(17)
Recommended Frequency of SPI Operation
Falling Edge of CS to Rising Edge of SCLK (Required Setup Time)
Falling Edge of SCLK to Rising Edge of CS (Required Setup Time)
SI to Falling Edge of SCLK (Required Setup Time)
Required High State Duration of SCLK (Required Setup Time
Required Low State Duration of SCLK (Required Setup Time
Falling Edge of SCLK to SI (Required Hold Time)
(18)
(18)
(18)
(18)
SO Rise Time
CL = 200 pF
SO Fall Time
CL = 200 pF
SI, CS, SCLK, Incoming Signal Rise Time
SI, CS, SCLK, Incoming Signal Fall Time
(19)
(19)
Falling Edge of RST to Rising Edge of RST (Required Setup Time)
Rising Edge of CS to Falling Edge of CS (Required Setup Time)
(18), (20)
Rising Edge of RST to Falling Edge of CS (Required Setup Time)
Time from Falling Edge of CS to SO Low Impedance
Time from Rising Edge of CS to SO High Impedance
Time from Rising Edge of SCLK to SO Data Valid
0.2 V
≤ SO ≥ 0.8 VDD, CL = 200 pF
DD
(21)
(22)
(23)
(18)
(18)
(18)
(18)
t
t
t
SI
f
t
LEAD
t
LAG
t
S
SCLK
W
SCLK
W
(
HOLD)
t
R
SPI
ISU
H
L
SO
– 1.0 2.0 MHz
– 50 167 ns
– 50 167 ns
– 25 83 ns
– – 167 ns
– – 167 ns
– 25 83 ns
ns
– 25 50
t
SO
F
ns
– 25 50
t
SI
R
t
SI
F
t
RST
W
t
CS
t
EN
t
SO(EN)
t
SO(DIS)
t
VALID
– – 50 ns
– – 50 ns
– – 3.0 µs
– – 5.0 µs
– – 5.0 µs
– – 145 ns
– 1.3 4.0 µs
ns
– 90 150
Notes
17. The 33976 shall meet all SPI interface timing requirements specified in the SPI Interface Timing section of this table, over the specified
temperature range. Digital interface timing is based on a symmetrical 50 percent duty cycle SCLK Clock Period of 333 ns. The device
shall be fully functional for slower clock speeds. Reference
Figure 4 and 5.
18. The maximum setup time specified for the 33976 is the minimum time needed from the microcontroller to guarantee correct operation.
19. Rise and Fall time of incoming SI, CS, and SCLK signals suggested for design consideration to prevent the occurrence of double pulsing.
20. The value is for a 1.0 MHz calibrated internal clock. The value will change proportionally as the internal clock frequency changes.
21. Time required for output status data to be terminated at SO. 1.0 kΩ load on SO
22. Time required for output status data to be available for use at SO. 1.0 kΩ load on SO.
23. Time required to obtain valid data out from SO following the rise of SCLK.
33976
Analog Integrated Circuit Device Data
8 Freescale Semiconductor
RST
CS
SCLK
SI
t
WRST
0.7 V
0.2 V
DD
0.2 V
DD
t
EN
0.7 V
t
LEAD
DD
DD
0.7 V
0.2 V
DD
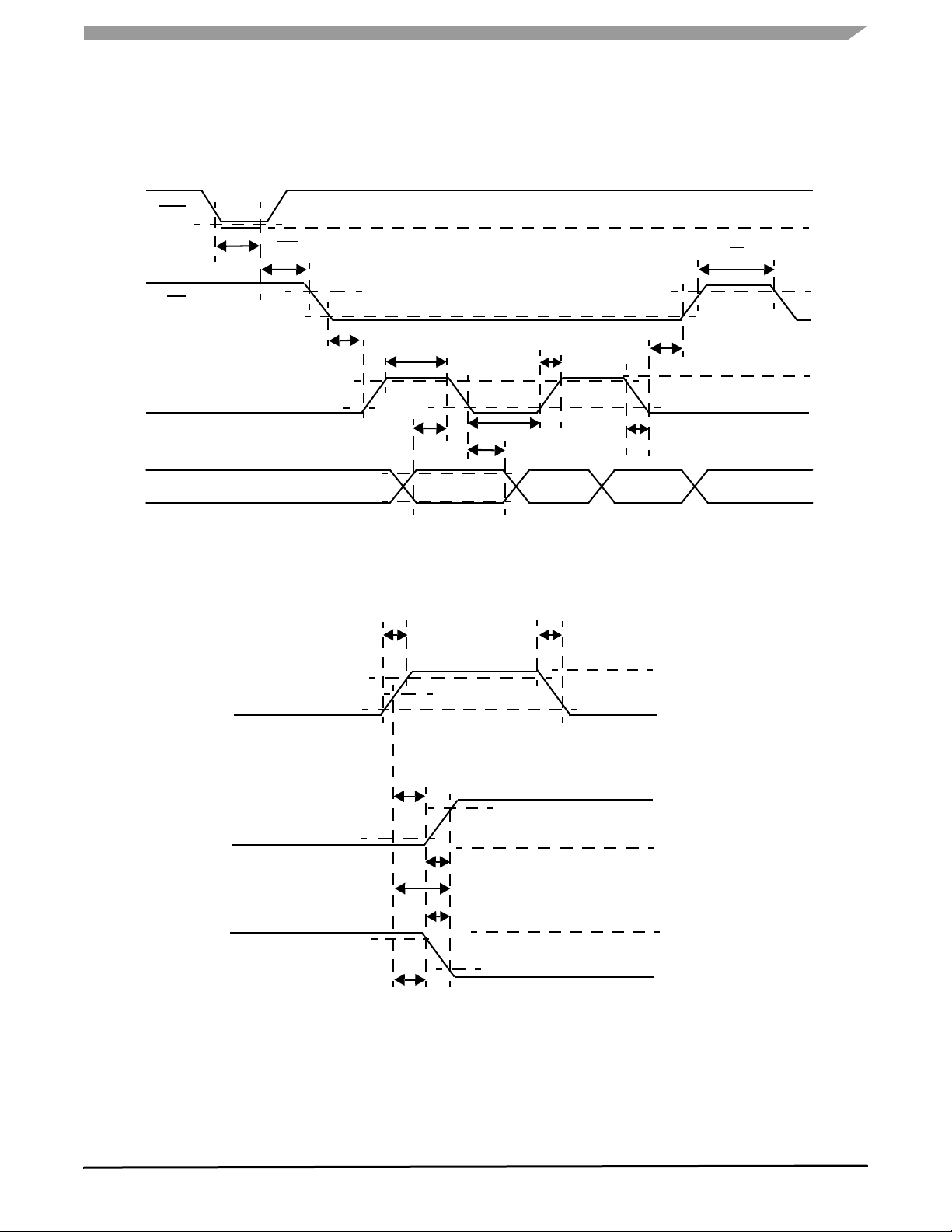
TIMING DIAGRAMS
t
WSCLKH
t
LEAD
DD
t
WSCLKL
t
SI(HOLD)
t
RSI
ELECTRICAL CHARACTERISTICS
0.7 V
DD
t
LAG
t
FSI
TIMING DIAGRAMS
t
CS
Don’t CareValidValid Don’t CareDon’t Care
V
IN
V
IL
V
IH
V
IL
V
IH
V
IL
V
IH
V
IL
SCLK
SO
Low-to-High
SO
High-to-Low
Figure 4. Input Timing Switching Characteristics
0.7 V
0.2 V
DD
t
FSI
1.0 V
DD
3.5 V
0.2 V
0.7 V
t
SO(EN)
DD
t
DD
t
SO(DIS)
t
RSI
VALID
50%
t
t
rSO
fSO
V
OH
V
OL
V
OH
V
OL
V
OH
V
OL
Figure 5. Valid Data Delay Time and Valid Time Waveforms
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 9
FUNCTIONAL DESCRIPTION
INTRODUCTION
FUNCTIONAL DESCRIPTION
INTRODUCTION
This 33976 is a single-packaged, Serial Peripheral
Interface (SPI) controlled, dual step motor gauge driver
integrated circuit (IC). This monolithic IC consists of four dual
output H-Bridge coil drivers and the associated control logic.
Each pair of H-Bridge drivers is used to automatically control
the speed, direction, and magnitude of current through the
two coils of a two-phase instrumentation step motor, similar
FUNCTIONAL PIN DESCRIPTION
H-BRIDGE OUTPUTS 0 (COS0+, COS0-, SIN0+,
SIN0-)
Each pin is the output pin of a half bridge, designed to
source or sink current. The H-Bridge pins linearly drive the
sine and cosine coils of two separate step motors to provide
four-quadrant operation.
GROUND (GND)
These pins serve as the ground for the source of the lowside output transistors as well as the logic portion of the
device. They also help dissipate heat from the device.
CHIP SELECT (CS)
The CS pin enables communication with the master
device. When this pin is in a logic [0] state, the 33976 is
capable of transferring information to, and receiving
information from, the master. The 33976 latches data in from
the Input Shift registers to the addressed registers on the
rising edge of
CS is logic [0]. When CS is logic high, signals at the
when
SCLK and SI pins are ignored and the SO pin is tri-stated
(high impedance).
state to a logic
internal pull-up (l
section of the Static Electrical Characteristics table entitled
CONTROL I/O, which is found on page 6.
CS. The output driver on the SO pin is enabled
CS will only be transitioned from a logic [1]
[0] state when SCLK is a logic [0]. CS has an
) connected to the pin, as specified in the
UP
to an MMT-licensed AFIC
motor.
The 33976 is ideal for use in automotive instrumentation
systems requiring distributed and flexible step motor gauge
driving. The device also eases the transition to step motors
from air core motors by emulating the air core pointer
movement with little additional processor bandwidth
utilization.
and SO is tri-stated (high impedance). Refer to the data
transfer timing diagrams in Figure 6 and Figure 7 on page 12.
6405 or a Switec MS-X15.xxx
SERIAL OUTPUT (SO)
The SO data pin is a tri-stateable output from the Shift
register. The Status register bits are the first 16 bits shifted
out. Those bits are followed by the message bits clocked in
FIFO, when the device is in a daisy chain connection or being
sent words that are multiples of 16 bits. Data is shifted on the
rising edge of the SCLK signal. The SO pin will remain in a
high impedance state until the
state.
CS pin is put into a logic low
SERIAL INPUT (SI)
The SI pin is the input of the SPI. Serial input information
is read on the falling edge of SCLK. A 16-bit stream of serial
data is required on the SI pin, beginning with the most
significant bit (MSB). Messages that are not multiples of 16
bits (e.g., daisy chained device messages) are ignored. After
transmitting a 16-bit word, the
(logic [1]) before transmitting a new word. SI information is
ignored when
CS is in a logic high state.
CS pin must be de-asserted
MULTIPLEXED OUTPUT (RTZ)
This is a multiplexed output pin for the non-driven coil,
during a Return to Zero (RTZ) event.
SERIAL CLOCK (SCLK)
SCLK clocks the Internal Shift registers of the 33976
device. The SI pin accepts data into the Input Shift register on
the falling edge of the SCLK signal, while the Serial Output
pin (SO) shifts data information out of the SO Line Driver on
the rising edge of the SCLK signal. It is important that the
SCLK pin be in a logic [0] state whenever the
transition. SCLK has an internal pull down (l
specified in the section of the Static Electrical Characteristics
table entitled
CS is logic [1], signals at the SCLK and SI pins are ignored
33976
10 Freescale Semiconductor
CONTROL I/O, which is found on page 6. When
CS makes any
), as
DWN
VOLTAGE (VDD)
This SPI and logic power supply input will work with 5.0 V
supplies.
RESET (RST)
If the master decides to reset the device or place it into a
sleep state, the RST pin is driven to a logic
RST pin will force all internal logic to the known default
the
state. This input has an internal active pull-up.
Analog Integrated Circuit Device Data
[0]. A logic [0] on

FUNCTIONAL DESCRIPTION
FUNCTIONAL PIN DESCRIPTION
BATTERY VOLTAGE (V
Power supply.
PWR
)
H-BRIDGE OUTPUTS 1 (SIN1-, SIN1+, COS1-,
COS1+)
Each of these pins is the output pin of a half bridge,
designed to source or sink current. The H-Bridge pins linearly
drive the sine and cosine coils of two separate step motors to
provide four-quadrant operation.
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 11
FUNCTIONAL DEVICE OPERATION
OPERATIONAL MODES
FUNCTIONAL DEVICE OPERATION
OPERATIONAL MODES
SPI PROTOCOL DESCRIPTION
The SPI interface has a full-duplex, three-wire
synchronous, 16-bit serial synchronous interface data
transfer and four I/O lines associated with it: Chip Select (
Serial Clock (SCLK), Serial Input (SI), and Serial Output
TIMING DESCRIPTION
This section provides a description of the 33976 SPI
behavior. To follow the explanations below, refer to Table 5
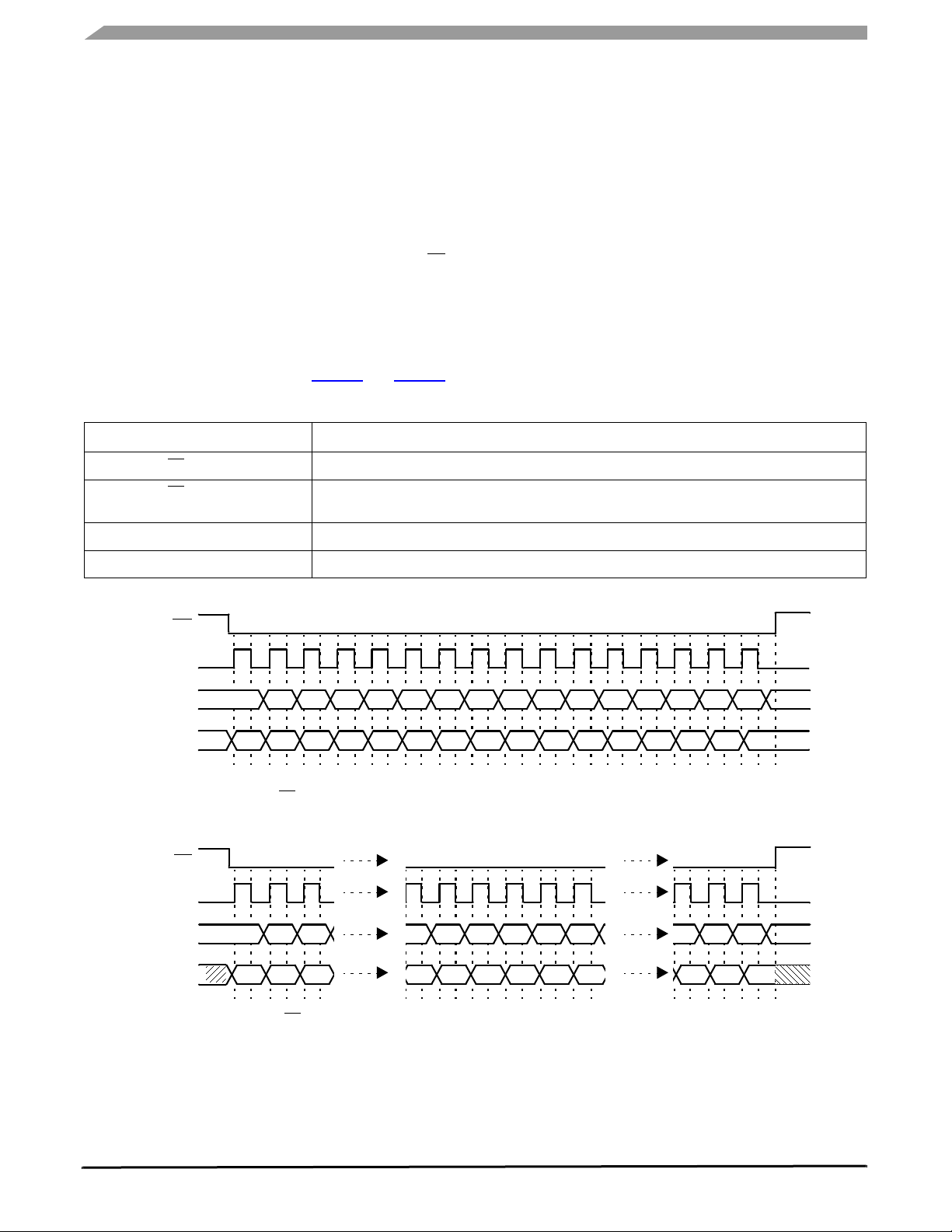
and to the timing diagrams shown in Figure 6 and Figure 7.
Table 5. Data Transfer Timing
Pin Description
CS),
(SO). The SI/SO pins of the 33976 follow a first in/first out
(D15/D0) protocol with both input and output words
transferring the most significant bit first. All inputs are
compatible with 5.0 V CMOS logic levels.
CS (1-to-0)
CS (0-to-1)
SO
SI
SO pin is enabled.
33976 configuration and desired output states are transferred and executed according to the data
in the Shift registers.
Will change state on the rising edge of the SCLK pin signal.
Will accept data on the falling edge of the SCLK pin signal.
CS
SCLK
SI
SO
Note SO is tri-stated when CS is logic [1].
D15 D14 D13 D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1
OD15 OD14 OD13 OD12 OD11 OD10 OD9 OD8 OD7 OD6 OD5 OD4 OD3 OD2 OD1
Output shift register is loaded here.
Figure 6. Single 16-Bit Word SPI Communication
CS
SCLK
D0
OD0
D0
SI
SO
1. SO is tri-stated when
Notes
2. D15, D14, D13, ..., and D0 refer to the first 16 bits of data into the 33976.
3. D15*, D14*, D13*, ..., and D0* refer to the most recent entry of program data into the 33976.
4. OD15, OD14, OD13, ..., and OD0 refer to the first 16 bits of fault and status data out of the 33976.
D15 D14 D13 D12 D11 D2 D1 D0 D15*D14*D13*D4 D3 D2*D1
OD15 OD14 OD13 OD12 OD11 OD2 OD1 OD0 D15 D14 D13 OD4 OD3 D2 D1
CS is logic [1].
*
*
D0
Figure 7. Multiple 16-Bit Word SPI Communication
33976
Analog Integrated Circuit Device Data
12 Freescale Semiconductor
FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
DATA INPUT
The Input Shift register captures data at the falling edge of
the SCLK clock. The SCLK clock pulses exactly 16
times only
inside the transmission windows (CS in a logic [0] state). By
the time the CS signal goes to logic [1] again, the contents of
the Input Shift register are transferred to the appropriate
internal register addressed in bits 15:13. The minimum time
CS should be kept high depends on the internal clock speed,
specified in the SPI INTERFACE TIMING
(17)
section of the
Static Electrical Characteristics, found on page 6. It must be
long enough so the internal clock is able to capture the data
LOGIC COMMANDS AND REGISTERS
COMMUNICATION MEMORY MAPS AND REGISTER DESCRIPTIONS
The 33976 device is capable of interfacing directly with a
microcontroller via the 16-bit SPI protocol specified below.
The device is controlled by the microprocessor and reports
back status information via the SPI. This section provides a
detailed description of all registers accessible via serial
interface. The various registers control the behavior of this
device.
A message is transmitted by the master beginning with the
MSB (D15) and ending with the LSB (D0). Multiple messages
can be transmitted in succession to accommodate those
applications where daisy chaining is desirable, or to confirm
transmitted data, as long as the messages are all multiples of
bits. Data is transferred through daisy-chained devices, as
16
illustrated in Figure 7, page 12. If an attempt is made to latch
in a message smaller than 16 bits wide, it is ignored.
Table 6 lists the seven registers the 33976 uses to
configure the device, control the state of the four H-bridge
outputs, and determine the type of status information that is
clocked back to the master. The registers are addressed via
D15:D13 of the incoming SPI word.
Table 6. Module Memory Map
Address
[15:13]
000 Power, Enable, Calibration,
and Configuration Register
001 Maximum Velocity Register VELR Page 15
010 Gauge 0 Position Register POS0R Page 16
011 Gauge 1 Position Register POS1R Page 16
100 Return to 0 Register RTZR Page 16
101 Return to 0
110 Ramp Selection Register RMPSELR Page 19
111 Reserved for Test – –
Register Name See Page
Configuration
Register
PECCR Page 13
RTZCR Page 17
from the Input Shift register and transfer it to the internal
registers.
DATA OUTPUT
At the first rising edge of the SCLK clock, with CS at
logic [0], the contents of the selected Status Word register
are transferred to the Output Shift register. The first 16
bits
clocked out are the status bits. If data continues to clock in
before the
CS transitions to a logic [1], the device begins to
shift out the data previously clocked in FIFO after the CS first
transitioned to logic [0].
MODULE MEMORY MAP
Various registers of the 33976 SPI module are addressed
by the three MSBs of the 16-bit word received serially.
Functions to be controlled include:
• Individual gauge drive enabling
• Power-up/down
• Internal clock calibration
• Gauge pointer position and velocity
• Gauge pointer zeroing
• Air core motor movement emulation
• Status information
Status reporting includes:
• Individual gauge overtemperature condition
• Battery overvoltage
• Battery undervoltage
• Pointer zeroing status
• Internal clock status
• Confirmation of coil output changes that should result in
pointer movement
• Real time pointer position information
• Real time pointer velocity step information
• Pointer movement direction
• Command pointer position status
• RTZ accumulator value
REGISTER DESCRIPTIONS
The following section describes the registers, their
addresses, and their impact on device operation.
Address 000 — Power, Enable, Calibration, and
Configuration Register (PECCR)
The Power, Enable, Calibration, and Configuration
Register is illustrated in
33976 using this register allows the master to
independently enable or disable the output drivers of the
(1)
two-gauge controllers, (2)
(3)
disable the air core emulation, (4) select the direction of
the pointer movement during pointer positioning and zeroing,
configure the device for the desired status information to
(5)
Table 7, page 14. A write to the
calibrate the internal clock,
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 13

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
be clocked out into the SO pin, or (6) send a null command
for the purpose of reading the status bits. This register is also
used to place the 33976 into a low current consumption
mode.
Each of the gauge drivers can be enabled by writing a
logic [1] to their assigned address bits, PE0 and PE1
respectively. This feature could be used to disable a driver if
it is failing or is not being used. The device can be placed into
a standby current mode by writing a logic
[0] to both PE0 and
PE1. During this state, most current consuming circuits are
biased off. When in the Standby mode, the internal clock will
remain ON.
The internal state machine utilizes a ROM table of step
times defining the duration that the motor will spend at each
microstep as it accelerates or decelerates to a commanded
position. The accuracy of the acceleration and velocity of the
motor is directly related to the accuracy of the internal clock.
Although the accuracy of the internal clock is temperature
independent, the non-calibrated tolerance is +70% to -35%.
The 33976 was designed with a feature allowing the internal
clock to be software calibrated to a tighter tolerance of ±10%,
using the
CS pin and a reference time pulse provided by the
microcontroller.
Calibration of the internal clock is initiated by writing a
logic [1] to PE3. The calibration pulse, which must be 8.0 µs
for an internal clock speed of 1.0 MHz, will be sent on the CS
pin immediately after the SPI word is sent. No other SPI lines
will be toggled. A clock calibration will be allowed only if the
gauges are disabled or the pointers are not moving, as
indicated by status bits MOV0 and MOV1. Additional details
are provided in the
Internal Clock Calibration section,
beginning on page 30.
Some applications may require a guaranteed maximum
pointer velocity and acceleration. Guaranteeing these
maximums requires that the nominal internal clock frequency
fall below 1.0
clock will always be below 1.0
initiating a calibration command, followed by an 8.0
MHz. The frequency range of the calibrated
MHz if bit PE4 is logic [0] when
µs
reference pulse. The frequency will be centered at 1.0 MHz if
bit PE4 is logic
[1].
Some applications may require a slower calibrated clock
due to a lower motor gear reduction ratio. Writing a logic [1]
to bit PE2 will slow the internal oscillator by one-third. Slowing
the clock accommodates a longer calibration pulse without
overrunning the internal counter— a con d i ti on de si g ne d to
generate a CAL fault indication. For example, calibration for
a clock frequency of 667 kHz would require a calibration
pulse of 12 µs. Unless the internal oscillator is slowed by
writing PE2 to logic
[1], a 12 µs calibration pulse may overrun
the counter and generate a CAL fault indication.
Some applications may require faster pointer positioning
than is provided with the air core motor emulation feature.
Writing logic [1] to bit PE5 will disable the air core emulation
for both gauges and provide an acceleration and deceleration
at the maximum that the velocity position ramp can provide.
If the Hold Counts need to be enabled and disabled
dynamically, then the POSxR commands could also be used.
Bit PE6 must always be written as a logic [0] during all
PECCR writes if the device is being used to drive an MMT
style motor. Similarly , this bit must always be written as a
[1] when being used to control Switec style motors.
logic
The default Pointer Position 0 (PE7 = 0) will be the farthest
counter-clockwise position. A logic
[1] written to bit PE7 will
change the location of the position 0, for the gauge selected
by bit PE8, to the farthest clockwise position. A change in
position 0 of only one, or both, of the two coils can be
accomplished by using bits PE8 and PE7. Performing an RTZ
will always move the pointer to position
0. Exercise care
when writing to PECCR bits PE8 and PE7 in order to prevent
accidental changes of the position
0 locations.
Bits PE11:PE8 determine the content of the bits clocked
out of the SO pin. When bit PE11 is at logic [0], the clocked
out bits will provide device status. If a logic
[1] is written to bit
PE11, the bits clocked out of the SO pin, depending upon the
state of bits PE10:PE8, provides either:
• Accumulator information and detection status during
the RTZ (PE10 logic
[0])
• Real time pointer position location at the time CS goes
low (PE10 logic [1] and PE9 logic [0]), or
• The real time step position of the pointer as described
in the velocity Table 30, page 28 (PE10, PE9, and PE8
logic [1]).
Additional details are provided in the SO Communication
section beginning on page 21.
If bit PE12 is logic [1] during a PECCR command, the state
of PE11:PE0 is ignored. This is referred to as the null
command and can be used to read device status without
affecting device operation.
Table 7. Power, Enable, Calibration, and Configuration Register (PECCR)
Address 000
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write PE12 PE11 PE10 PE9 PE8 PE7 PE6 PE5 PE4 PE3 PE2 PE1 PE0
The bits in Table 7 are write-only.
PE12 (D12) — Null Command for Status Read • 0 = Disable
•1 = Enable
33976
Analog Integrated Circuit Device Data
14 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
PE11 (D11) — Status Select bit. This bit selects the
information clocked out of the SO pin.
• 0 = Device Status (the logic states of PE10, PE9, and
PE8 don’t cares)
• 1 = RTZ Accumulator Value, Gauge 0 or 1 Pointer
position, or Gauge 0 and 1 Velocity ramp position
(depending upon the logic states of PE10, PE9, and
PE8)
PE10 (D10) — RTZ Accumulator or Pointer Status Select
bit. This bit is recognized only when PE11 = 1.
• 0 = RTZ Accumulator Value and status
• 1 = Pointer Position or Speed
PE9 (D9) — Pointer Position or Pointer Speed Select bit.
This bit is recognized only if PE11 and PE10 = 1.
• 0 = Gauge 0 or Gauge 1 Pointer Position
• 1 = Gauge 0 and Gauge 1 Pointer Speed
PE8 (D8) — Pointer Position Gauge Select bit. Also the
Position 0 of the selected gauge is determined by the PE7
selection. This bit is recognized only if PE11 and PE10 = 1
and PE9 = 0.
• 0 = Gauge 0 position
• 1 = Gauge 1 position
PE7 (D7) — Position 0 Location Select bit. This bit
determines the Position 0 of the gauge selected by PE8. RTZ
direction will always be to the position 0.
• 0 = Position 0 is the most CCW (counterclockwise)
position
• 1 = Position 0 is the most CW (clockwise) position
PE6 (D6) — Motor Type Selection bit.
• 0 = MMT Style (coil phase difference = 90°)
• 1 = Switec Style (coil phase difference = 60°)
PE5 (D5) — Air Core Motor Emulation bit. This bit is
enabled or disabled (acceleration and deceleration is
constant if disabled).
• 0 = Enable
• 1 = Disable
PE4 (D4) — Clock Calibration Frequency Selector
• 0 = Maximum f =1.0 MHz (for 8.0 µs calibration pulse)
• 1 = Nominal f =1.0 MHz (for 8.0 µs calibration pulse)
PE3 (D3) — Clock Calibration Enable bit. This bit enables
or disables the clock calibration.
• 0 = Disable
•1 = Enable
PE2 (D2) — Oscillator Adjustment
•0 = t
CLU
• 1 = 0.66 x t
CLU
PE1 (D1) — Gauge 1 Enable bit. This bit enables or
disables the output driver of Gauge 1.
• 0 = Disable
•1 = Enable
PE0 (D0) — Gauge 0 Enable bit. This bit enables or
disables the output driver of Gauge 0.
• 0 = Disable
•1 = Enable
Address 001 — Maximum Velocity Register (VELR)
The Gauge Maximum Velocity Register is used to set a
maximum velocity for each gauge (refer to Table 8). Bits
V7:V0 contain a position value from 1– 225 that is
representative of the velocity position value described in
Table 30, Velocity Table, page 28. The table value becomes
the maximum velocity until it is changed to another value. If a
maximum value is chosen greater than the maximum velocity
in the acceleration table, the maximum table value becomes
the maximum velocity. If the motor is turning at a speed
greater than the new maximum, the motor immediately
moves down the velocity ramp until the speed falls equal to
or below it. Velocity for each motor can be changed
simultaneously or independently by writing V8 and/or V9 to a
[1]. Bits V12:V10 must be at logic [0] for valid VELR
logic
commands.
Table 8. Maximum Velocity Register (VELR)
Address 001
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write 0 0 0 V9 V8 V7 V6 V5 V4 V3 V2 V1 V0
The bits in Table 8 are write-only.
V12:V10 (D12:D10) — These bits must be transmitted as
logic [0] for valid VELR commands
V9 (D9) — Gauge 1 Velocity. Specifies whether the
maximum velocity determined in the V7: V0 field will apply to
Gauge 1.
• 0 = Velocity does not apply to Gauge 1
• 1 = Velocity applies to Gauge 1
V8 (D8) — Gauge 0 Velocity. Specifies whether the
maximum velocity specified in the V7: V0 field will apply to
Gauge 0.
• 0 = Velocity does not apply to Gauge 0
• 1 = Velocity applies to Gauge 0
V7:V0 (D7:D0) — Maximum Velocity. Specifies the
maximum velocity position from
Table 30, page 28. This
velocity will remain the maximum of the intended gauge until
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 15

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
changed by command. Velocities can range from position 1
(00000001) to position 225 (11111111).
Commanded positions can range from 0 to 4095. The D12
bit is used to disable the damping (i.e., hold counts) for each
respective gauge. This feature allows the user to easily turn
Addresses 010 and 011 — Gauge 0/1 Position Registers
(POS0R, POS1R)
SI Address 010 (Gauge 0 Position Register) and SI
Address 011 (Gauge 1 Position Register) Register bits PO
PO0 are written to when communicating the desired
11:
on and off the damping that was configured with the
RMPSELR. Disabling the hold counts allows the pointer to
decelerate to the commanded position, as fast as possible
down the velocity ramp. When disabled, the acceleration and
deceleration of the pointer are symmetrical.
pointer positions.
Table 9. Gauge 0 Position Register (POS0R)
Address 010
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write HE012 P0 11 P0 10 P0 9 P0 8 P0 7 P0 6 P0 5 P0 4 P0 3 P02 P01 P0 0
The bits in Table 9 are write-only.
HE0 12 (D12) — This bit is used to disable the damping
(i.e., hold counts) for Gauge
0 (1 = Damping disabled;
0 = Damping enabled).
P0 11:P0 0 (D11:D0) — Desired pointer position of
0. Pointer positions can range from 0
Gauge
(000000000000) to position 4095 (111111111111). For a
step motor requiring 12 microsteps per degree of pointer
movement, the maximum pointer sweep is 341.25°.
.
Table 10. Gauge 1 Position Register (POS1R)
Address 011
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write HE112 P1 11 P1 10 P1 9 P1 8 P1 7 P1 6 P1 5 P1 4 P1 3 P1 2 P1 1 P1 0
The bits in Table 10 are write-only.
HE1 12 (D12) — This bit is used to disable the damping
(i.e., hold counts) for Gauge 1 (1 = Dampin g disabled;
= Damping enabled).
0
P1 11:P1 0 (D11:D0) — Desired pointer position of
1. Pointer positions can range from 0
Gauge
(000000000000) to position 4095 (111111111111). For a
step motor requiring 12
movement, the maximum pointer sweep is 341.25°
microsteps per degree of pointer
(4095 ÷ 12).
Address 100 — Gauge Return to Zero Register (RTZR)
Gauge Return to Zero Register (RTZR) (refer to Table 11,
page 17) is written to return the gauge pointers to the zero
position. During an RTZ event, the pointer is returned to zero
using full steps, where only one coil is driven at any point in
the non-driven coil is integrated and its results are stored in
an accumulator.
A logic [1] written to bit RZ1 enables a Return to Zero for
0 if RZ0 is logic [0], and Gauge 1 if RZ0 is logic [1],
Gauge
respectively. Similarly, a logic
[0] written to bit RZ1 disables a
Return to Zero for Gauge 0 when RZ0 is logic [0], and
Gauge
1 when RZ0 is logic [1], respectively.
Bits D12:D5 and D3:D2 must be at logic [0] for valid RTZR
commands.
Bit RZ4 is used to enable an unconditional RTZ event. A
logic
[0] results in a typical RTZ event, automatically
providing a Stop when a stall condition is detected. A logic [1]
will result in RTZ movement, causing a Stop if a logic
written to bit RZ0. This feature is useful during development
and characterization of RTZ requirements.
time. The back electromotive force (EMF) signal present on
[0] is
33976
Analog Integrated Circuit Device Data
16 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 11. Return to Zero Register (RTZR)
Address 100
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write 0 0 0 0 0 0 0 0 RZ4 0 RZ2 RZ1 RZ0
The register bits in Table 11 are write-only.
RZ12:RZ5 (D12:D5) — These bits must be transmitted as
logic [0] for valid commands.
RZ4 (D4) — This bit is used to enable an unconditional
RTZ event.
• 0 = Automatic Return to Zero
• 1 = Unconditional Return to Zero
RZ3 (D3) — This bit must be transmitted as logic [0] for
valid commands.
RZ2 (D2) — Return to Zero Direction bit. This bit is used to
properly sequence the integrator, depending upon the
desired zeroing direction.
• 0 = Return to Zero will occur in the CCW direction
(PE7 = 0)
• 1 = Return to Zero will occur in the CW direction
(PE7 = 1)
RZ1 (D1) — Return to Zero Direction. This bit commands
the selected gauge to return the pointer to zero position.
• 0 = Return to Zero Disabled
• 1 = Return to Zero Enabled
RZ0 (D0) — Gauge Select: Gauge 0/Gauge 1. This bit
selects the gauge to be commanded.
• 0 = Selects Gauge 0
• 1 = Selects Gauge 1
Address 101 — Gauge Return to Zero Configuration
Register
Gauge Return to Zero Configuration Register (RTZCR) is
used to configure the Return to Zero Event (refer to
Table 12,
page 18). It is written to modify (1) the step time, or rate at
which the pointer moves during an RTZ event, (2) the
integration blanking time, which is the time immediately
following the transition of a coil from a driven state to an open
state in the RTZ mode, and (3) the threshold of the RTZ
integration register.
The values used for this register should be selected during
development to optimize the RTZ for each application.
Selecting an RTZ step rate resulting in consistently
successful zero detections depends on a clear understanding
of the motor characteristics. Specifically, resonant
frequencies exist due to the interaction between the motor
and the pointer. This command allows movement of the RTZ
pointer speed away from these frequencies. Also, some
motors require a significant amount of time for the pointer to
settle to a steady state position when moving from one full
step position to the next. Consistent and accurate integration
values require the pointer be stationary at the end of the full
step time.
Bits RC3:RC0, RC12:RC11, and RC4 determine the time
spent at each full step during an RTZ event. Bits RC3:RC0
are used to select a ∆t ranging from 0 ms (0000) to 61.44 ms
(1111) in increments of 4.096
ms (refer to Table 13,
page 18). The ∆t is multiplied by the factor M, which is
defined by bits RC12:RC11. The product is then added to the
blanking time, selected using bit RC4, to generate the full
step time. The multiplier selected with RC12:RC11 will be
(00), 2 (01), or 4 (10) as illustrated in the equations below.
1
The multiplier selected with RC12:RC11 will be 1
(00), 2 (01),
or 4 (10) as illustrated in the equations below. Note that the
RC12:RC11 value of 8 (11) is not recommended for use in a
product design application, because of the potential for an
RTZ accumulator internal overflow, due to the long time step.
The blanking time that is selected with bit RC4 determines
the time that is provided immediately following a full step
change, before enabling the integration of the non-driven coil
signal. The blanking time is either 512
[0], or 768
µs when it is logic [1].The full step time is
µs when RC4 is logic
generated using the following equations:
When D3:D0 (RC3:RC0) ≠ 0000
Full Step (t) = ∆t x M + blanking (t) (1)
When D3:D0 (RC3:RC0) = 0000
Full Step (t) = blanking (t) + 2.048 ms (2)
Note In equation (2), a 2.048 ms offset is added to the full
step time when the RC3:RC0 = 0000. The full step time
default value after a logic reset is 12.80
(RC12:RC11
= 00, RC4 = 0, and RC3:RC0 = 0011).
ms
If there are two full steps per degree of pointer movement,
the pointer speed is 1/(FullStep
x 2) deg/s.
Detecting pointer movement is accomplished by
integrating the EMF present in the non-driven coil during the
RTZ event. The integration circuitry is implemented using a
Sigma-Delta converter resulting in the placement of a value
in the 15-bit RTZ accumulator at the end of each full step. The
value in the RTZ accumulator represents the change in flux
and is compared to a threshold. Values above the threshold
indicate a pointer is moving. Values below the threshold
indicate a stalled pointer, thereby resulting in the cessation of
the RTZ event.
The RTZ accumulator bits are signed and represented in
two’s complement. After a full step of integration, a sign bit of
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 17

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
0 is the indicator of an accumulator exceeding the decision
threshold of 0, and the pointer is assumed to still be moving.
Similarly, if the sign bit is logic [1] after a full step of
integration, the accumulator value is negative and the pointer
is assumed to be stopped. The integrator and accumulator
are initialized after each full step. If the PECCR command is
written to clock out the RTZ accumulator values via the SO,
the OD14 bit corresponds to the sign bit of the RTZ
accumulator.
Accurate pointer stall detection depends on a correctly
preloaded accumulator for specific gauge, pointer, and full
step combinations. Bits RC10:RC5 are use d to of fse t th e
motor. The initial accumulator value at the start of a full step
of integration is negative. If the accumulator was correctly
preloaded, a free-moving pointer will result in a positive value
at the end of the integration time, and a stalled pointer will
result in a negative value. The preloaded values associated
with each combination of bits RC10:RC5 are illustrated in
Table 14, page 19. The accumulator should be loaded with a
value resulting in an accumulator MSB to a logic [1] when the
motor is stalled. For the default mode, after a power-up or any
reset, the 33976 device sets the accumulator value to -1,
resulting in an unconditional RTZ pointer movement until it is
increased.
initial RTZ accumulator value, properly detecting a stalled
.
Table 12. RTZCR SI Register Assignment
Address 101
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write RC12 RC11 RC10 RC9 RC8 RC7 RC6 RC5 RC4 RC3 RC2 RC1 RC0
The bits in Table 12 are write-only.
RC12:RC11 (D12:D11) — These bits, along with RC3:RC0
(D3:D0) and RC4 (D4), determine the full step time and,
therefore, the rate at which the pointer will move during an
RTZ event. The values of D12:D11 determine the multiplier
(M) used in equation (1) (refer to
page 17).
RC12:RC11 = M; default value = 00
• 00 = 1
• 01 = 2
• 10 = 4
• 11 = 8 (Not to be used for design)
RC10:RC5 (D10:D5) — These bits determine the value
preloaded into the RTZ integration accumulator to adjust the
detection threshold. Values range from -1 (00000000) to 1009 (11111111) as shown in
Table 14, the default value =
000000.
RC4 (D4) — This bit determines the RTZ blanking time
Table 13. RTZCR Full Step Time
RC3 RC2 RC1 RC0 ∆t (ms)
0 0 0 0 0
0 0 0 1 4.096
0 0 1 0 8.192
0 0 1 1 12.288
0 1 0 0 16.384
0 1 0 1 20.480
0 1 1 0 24.576
0 1 1 1 28.672
1 0 0 0 32.768
(blanking (t)). The default value = 0
• 0 = 512 µs
• 1 = 768 µs
RC3:RC0 (D3:D0) — These bits, along with RC12:RC11
(D12:D11) and RC4 (D4), determine the time variables used
to calculate the full step times with equations (1) or (2)
illustrated above. RC3:RC0 determines the
∆t time. The ∆t
values range from 0 (0000) to 61.440 ms (1111) and are
shown in
Table 13. The default ∆t is 0 (0011).
Note Equation (2) (refer to page 17) is only used to
calculate the full step time if RC3:RC0 = 0000. Use
1 0 0 1 36.864
1 0 1 0 40.960
1 0 1 1 45.056
1 1 0 0 49.152
1 1 0 1 53.248
1 1 1 0 57.344
1 1 1 1 61.440
equation (1) for all other combinations of RC3:RC0.
33976
Analog Integrated Circuit Device Data
18 Freescale Semiconductor

Table 14. RTZCR Accumulator Offset
FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
RC10 RC9 RC8 RC7 RC6 RC5
0 0 0 0 0 0 0 -1
0 0 0 0 0 1 1 -17
0 0 0 0 1 0 2 -33
0 0 0 0 1 1 3 -49
0 0 0 1 0 0 4 -65
.
.
.
1 1 1 1 1 1 63 -1009
Address 110 — Ramp Selection Register (RMPSELR)
SI Address 110 Ramp Selection Register (RMPSELR)
(refer to Table 15, page 20). A write to the 33976 using this
register allows the master to independently modify the
pointer movement response characteristics of each gauge
driver. The user has three variables that can be configured,
during the initialization of the device, to provide quick and
responsive pointers (e.g., tachometer applications) or soft
landing and less responsive pointers (e.g., speedometer or
fuel indicators). These three variables are (1)
selection RS (RS3:RS0), (2) the hold count cut-in location
offset variable HCP (HCP2: HCP0), and (3) the hold count
value HC, (HC3:HC0). Each of these variables is described
below and an implementation example is shown in
page 31.
The state machine uses the velocity ramp (refer to
Table 30, page 28) to control the acceleration, deceleration
and speed of the pointer movement. During an acceleration
from a stopped position, the state machine will microstep the
pointer at each velocity step, starting with step 0, in
succession until the desired pointer speed is reached.
Similarly, as the pointer approaches the commanded
position, the state machine will microstep the motor at
successive velocity steps down the velocity ramp until
reaching step 0. The fastest that a pointer can accelerate,
decelerate or change directions is limited by the velocity
ramp.
For example, if a pointer is moving in the clockwise
direction and is commanded to a position that is counter
clockwise from the current pointer location, then the state
machine must first decelerate the pointer down the ramp to
the step 0 location, change directions and then accelerate up
the ramp towards the commanded location. In this situation,
the state machine will force movement down and then up the
ramp as fast as possible by stepping at each Velocity Position
only once for a direction change. The low velocity steps (e.g.,
Velocity Position 1 is 27
.
.
.
.
.
.
.
.
.
the ramp zero
Figure 11,
ms) are significant in that they can
.
.
.
.
.
.
Bits RS3:RS0 of the RMPSELR are used to truncate as
many as 15 velocity steps off of the bottom of the velocity
ramp. The value of RS determines the Initial Velocity Ramp
Position:
Initial Velocity Position = RS + 1
For example, writing a value of 4 to these bits truncates the
velocity ramp by 4 and would result in a first and last velocity
step of 5.86ms (Velocity Position 5). A pointer will change
directions much faster with this abbreviated ramp than it
would if using the default ramp with a Velocity Position 1 of
ms
27
Most applications require a smooth dynamic pointer as the
commanded position is constantly updated. Movement along
the ramp at the maximum acceleration and deceleration (only
one step at each velocity position) results in a choppy
movement because the movement velocity range is large for
small changes in position as the pointer quickly reaches
commanded locations from command to command.
Configuring the state machine to repeat velocity steps at
several of the last few step locations, when the pointer
decelerates to the commanded location, can eliminate this
choppy movement. These repetitive steps are referred to as
hold counts.
Bits HCP2: HCP0 of the RMPSELR determine the velocity
step location at which the hold counts begin during a
deceleration to the commanded position. The value written to
HCP2: HCP0 (HCP) is multiplied by 8 and added to the RS
value. The result is the first velocity position, or the Hold
Count Cut-In Point, to which the hold counts will apply during
a deceleration.
First Velocity Position w/ Hold Counts = HCP x 8 + RS
The exception to this is when the HCP2: HCP0 value is
000. In this case, HCP
above the RS value. The default value of the HCP
hold count cut-in point of 16 velocity steps above the RS
value.
Preload Value
(PV)
.
.
.
= 8 and the cut-in point will be 64 steps
limit the speed with which a pointer can change direction.
Initial Accumulator
Value = (-16
x PV) -1
.
.
.
= 2 or a
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 19

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
The value of RS also determines the last velocity position
step for which the Hold Counts are applied:
Last Velocity Position w/ Hold Counts = RS + 2
The number of hold counts per applicable velocity step is
determined by the value written to HC3:HC0 (HC) and can
range from 0 to 15 steps. This number of hold counts will be
applied to each step below the Hold Count Cut-In as
determined by HCP and RS. The default value of HC is 5.
Note: the following relationship between the variables
HC x (HCP x 8 - 1) + (225 - RS) < 512
Therefore, if RS = 0 and the Hold Count Cut-In point is 64,
the largest value of Hold Counts you can choose is 4.
4 * (64 - 1) + (225 - 0) = 477
The GSEL bit determines which of the two gauges the rest
of the RMPSELR bits are applied to. A GSEL bit set to logic
1 will apply the RMPSELR data to Gauge
1 and, Logic 0 to
Gauge 0, respectively. Configuring both gauges requires two
writes to this register.
must be adhered to for the state machine to work properly:
Table 15. Ramp Selection Register (RMPSELR)
Address 101
Bits D12 D11 D10 D9 D8 D7 D6 D5 D4 D3 D2 D1 D0
Read – – – – – – – – – – – – –
Write GSEL 12 GSEL 11 HCP2 HCP1 HCP0 HC3 HC2 HC1 HC0 RS3 RS2 RS1 RS0
The bits in Table 15 are write-only.
GSEL 12 (D12) — Gauge Sele ct bit. The valu e of this bit
determines the gauge for which the settings apply (refer to
page 17):
• 1 = Gauge 1
• 0 = Gauge 0
GSEL 11 (D11) — This bit must be transmitted as Logic 0
for valid commands.
HCP2 : HPC0 (D10 : D8) — Hold Count Cut-in Poi nt
variable. These bits determine HCP, which is then multiplied
by 8, and added to the RS number, to determine the actual
Hold Count Cut-In Step value. The values of HCP range from
1 to 8 as shown in
.
Table 16. The default value is 2.
Table 16. First Hold Count Velocity Position
HCP2 HCP1 HCP0
Velocity Step
(HCP x 8 + RS)
Table 17. Hold Counts Per Step
HC3 HC2 HC1 HC0
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
Hold Counts /
Step (HC)
0 0 0 64 + RS
0 0 1 8 + RS
0 1 0 16 + RS
0 1 1 24 + RS
1 0 0 32 + RS
1 0 1 40 + RS
1 1 0 48 + RS
1 1 1 56 + RS
HC3 : HC0 (D7 : D4) — These bits determine the number of
Hold Counts that will be applied to the steps that are
determined by the HCP2:HCP0 and RS3:RS0 bits. The HC
values range from 0 to 15 and are shown in
Table 17. The
1 0 0 0 8
1 0 0 1 9
1 0 1 0 10
1 0 1 1 11
1 1 0 0 12
1 1 0 1 13
1 1 1 0 14
1 1 1 1 15
RS3 : RS0 (D3 : D0) — These bits determine the number of
velocity steps that are truncated from the Velocity Position
ramp. The values range from 0 to 15 and are shown in
Table 18. The default value is 0.
default value is 5.
33976
Analog Integrated Circuit Device Data
20 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 18. Truncated Velocity Steps
RS3 RS2 RS1 RS0
0 0 0 0 0
0 0 0 1 1
0 0 1 0 2
0 0 1 1 3
0 1 0 0 4
0 1 0 1 5
0 1 1 0 6
0 1 1 1 7
1 0 0 0 8
1 0 0 1 9
1 0 1 0 10
1 0 1 1 11
1 1 0 0 12
1 1 0 1 13
1 1 1 0 14
1 1 1 1 15
Zero Velocity
Position # (RS)
SO Communication
When the CS pin is pulled low, the internal status register,
as configured with the PECCR command bits PE11:PE8, is
loaded into the output register and the data is clocked out
MSB (OD15) first. Following a
CS transition 0 to 1, the device
determines if the shifted-in message was of a valid length (a
valid message length is one that is greater than 0 bits and a
multiple of 16 bits) and, if so, latches the incoming data into
the appropriate registers.
At this time, the SO pin is tri-stated and the status register
is now able to accept new status information. Fault status
information will be latched and held until the Device Status
Table 20. Device Status Output Register
Output register is selected and it is clocked out via the SO. If
the message length was determined to be invalid, the fault
information will not be cleared and will be transmitted again
during the next valid SPI message. Pointer status information
bits (e.g., pointer position, velocity, and commanded position
status) will always reflect the real time state of the pointer.
Any bits clocked out of the SO pin after the first 16 are
representative of the initial message bits clocked into the SI
pin since the
CS pin first transitioned to a logic [0]. This
feature is useful for daisy-chaining devices as well as
message verification.
As described above, the last valid write to bits PE11:PE8
of the PECCR command determines the nature of the status
data that is clocked out of the SO pin.
There are five different types of status information
available:
1. Device Status (refer to Table 20, page 21)
2. RTZ Accumulator St atus (refer to Table 22, page 23)
3. Gauge 0 Pointer Position Status (refer to Table 24,
page 24)
4. Gauge 1 Pointer Position Status (refer to Table 26,
page 24)
5. Gauge 1 and 2 Pointer Velocity Status (refer to
Table 28, page 24)
Once a specific status type is selected, it will not change
until either the PECCR command bits PE11:PE8 (D11:D8)
are written to select another or the device is reset. Each of the
Status types and the PECCR bit necessary to select them are
described in the following paragraphs.
Device Status Information
Most recent valid PECCR command resulting in the
Device Status output:
Table 19.
D11 D10 D9 D8
0 x x x
x = Don’t care.
Bits OD15 OD14 OD13 OD12 OD11 OD10 OD9 OD8 OD7 OD6 OD5 OD4 OD3 OD2 OD1 OD0
Read DIR1 DIR0 0POS1 0POS0 CMD1 CMD0 OV UV CAL OVUV MOV1 MOV0 RTZ1 RTZ0 OT1 OT0
Write – – – – – – – – – – – – – – – –
The bits in Table 20 are read-only bits.
DIR1 (OD15) — This bit indicates the direction Gauge 1
pointer is moving.
• 0 = Toward position 0
• 1 = Away from position 0
DIR0 (OD14) — This bit indicates th e direction Gauge 0
pointer is moving.
• 0 = Toward position 0
• 1 = Away from position 0
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 21

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
0POS1 (OD13) — This bit indicates the configured Position
0 for Gauge 1.
•0 = Farthest CCW
•1 = Farthest CW
0POS0 (OD12) — This bit indicates the configured Position
0 for Gauge 0.
• 0 = Farthest CCW
•1 = Farthest CW
CMD1 (OD11) — This bit indicates whether Gauge 1 is at
the most recently commanded position.
• 0 = At commanded position
• 1 = Not at commanded position
CMD0 (OD10) — This bit indicates whether Gauge 0 is at
the most recently commanded position.
• 0 = At commanded position
• 1 = Not at commanded position
OV (OD9) — Overvoltage Indication. A logic [1] on this bit
indicates V
voltage exceeded the upper limit of V
PWR
PWROV
since the last SPI communication (refer to the Static Electrical
Characteristics table under
POWER INPUT, page 5). An
overvoltage event will automatically disable the driver
outputs. Because the pointer may not be in the expected
position, the master may want to re-calibrate the pointer
position with an RTZ command after the voltage returns to a
normal level. For an overvoltage event, both gauges must be
re-enabled as quickly as this flag returns to logic
[0]. The
state machine will continue to operate properly as long as
VDD is within the normal range.
• 0 = Normal range
• 1 = Battery voltage exceeded V
PWROV
UV (OD8) — Undervoltage Indication. A logic [1] on this bit
indicates the V
voltage fell below V
PWR
PWRUV
since the last
SPI communication (refer to the Static Electrical
Characteristics table under POWER INPUT, page 5). An
undervoltage event is just flagged; however, at some voltage
level below 4.0 V, the outputs turn OFF and the state
machine resets. Because the pointer may not be in the
expected position, the master may want to re-calibrate the
pointer position with an RTZ command after the voltage
returns to a normal level. For an undervoltage event, both
gauges may need to be re-enabled as quickly as this flag
returns to logic
[0]. The state machine will continue to operate
properly as long as VDD is within the normal range.
• 0 = Normal range
• 1 = Battery voltage fell below V
PWRUV
CAL (OD7) — Calibrated Clock out of Specifi ca tion. A
[1] on this bit indicates the clock count calibrated to a
logic
value outside the expected range given the tolerance
specified by t
table under
in the Dynamic Electrical Characteristics
CLC
POWER OUTPUT AND CLOCK TIMINGS,
page 7.
• 0 = Clock within spec
• 1 = Clock out of spec
OVUV (OD6) — Undervoltage or Overvoltage Indication.
A logic [1] on this bit indicates the V
voltage fell to a level
PWR
below the V
since the last SPI communication (refer to
PWRUV
the Static Electrical Characteristics table under POWER
INPUT, page 5). An undervoltage event is just flagged, while
an overvoltage event automatically disables the drive
outputs. Because the pointer may not be in the expected
position, the master may want to re-calibrate the pointer with
an RTZ command after the voltage returns to normal level.
For an overvoltage event, both gauges must be re-enabled
as soon as this flag returns to logic
[0]. The state machine will
continue to operate properly as long as VDD is within the
normal range.
• 0 = Normal range
• 1 = Battery voltage fell below V
V
PWROV
PWRUV
or exceeded
MOV1 (OD5) — This bit identifies Gauge 1 movement
since last SPI communication. A logic [1] on this bit indicates
the Gauge 1 pointer position changed since the last SPI
command. This information allows the master to confirm the
pointer is moving as commanded. This bit may also be used
to determine if Gauge
1 is enabled or disabled.
• 0 = Gauge 1 position has not changed since the last SPI
command
• 1 = Gauge 1 pointer position has changed since the last
SPI command
MOV0 (OD4) — Gauge 0 Movement Since last SPI
Communication. A logic [1] on this bit indicates the Gauge 0
pointer position has changed since the last SPI command.
This information allows the master to confirm the pointer is
moving as commanded. This bit may also be used to
determine if Gauge
0 is enabled or disabled.
• 0 = Gauge 0 position has not changed since the last SPI
command
• 1 = Gauge 0 pointer position has changed since the last
SPI command
RTZ1 (OD3) — RTZ1 Is Enabled or Disabled. A logic [1]
on this bit indicates Gauge
1 is in the process of returning to
the zero position as requested with the RTZ command. This
bit will continue to indicate a logic
[1] until the SPI message
following a detection of the zero position, or the RTZ feature
is commanded OFF using the RTZ message.
• 0 = Return to Zero disabled
• 1 = Return to Zero enabled successfully
RTZ0 (OD2) — RTZ0 Is Enabled or Disabled. A logic [1]
on this bit indicates Gauge 0 is in the process of returning to
the zero position as requested with the RTZ command. This
bit continues to indicate a logic
[1] until the SPI message
following a detection of the zero position, or the RTZ feature
is commanded OFF using the RTZ message.
• 0 = Return to Zero disabled
• 1 = Return to Zero enabled successfully
OT1 (OD1) — Gauge 1 Junction Overtemperature.
A logic [1] on this bit indicates that the coil drive circuitry
dedicated to drive Gauge 1 has exceeded the maximum
allowable junction temperature since the last SPI
communication and that Gauge
1 has been disabled. It is
recommended that the pointer be re-calibrated using the RTZ
33976
Analog Integrated Circuit Device Data
22 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
command after re-enabling the gauge using the PECCR
command. This bit remains logic [1] until the gauge is
enabled.
• 0 = Temperature within range
command. This bit remains logic
enabled.
•0 = Temperature within range1 = Gauge 0 maximum
allowable junction temperature condition is reached
[1] until the gauge is re-
• 1 = Gauge 1 maximum allowable junction temperature
condition has been reached
OT0 (OD0) — Gauge 0 Junction Ove r temperature. A
logic
[1] on this bit indicates that the coil drive circuitry
dedicated to drive Gauge
0 has exceeded the maximum
allowable junction temperature since the last SPI
communication and that Gauge 0 has been disabled. It is
recommended that the pointer be re-calibrated using the RTZ
command after re-enabling the gauge using the PECCR
RTZ Accumulator Status Information
Most recent valid PECCR command resulting in the RTZ
Accumulator status output:
Table 21.
D11 D10 D9 D8
1 0 x x
x = Don’t care.
Table 22. RTZ Accumulator Status Output Register
Bits OD15 OD14 OD13 OD12 OD11 OD10 OD9 OD8 OD7 OD6 OD5 OD4 OD3 OD2 OD1 OD0
Read RTZ ACC14 ACC13 ACC12 ACC11 ACC10 ACC9 ACC8 ACC7 ACC6 ACC5 ACC4 ACC3 AC2C ACC1 ACC0
Write – – – – – – – – – – – – – – – –
The bits in Table 22 are read-only bits.
RTZ (OD15) — RTZ Bit Is Enabled or Disabled. A logic [1]
on this bit indicates that the Gauge is in the process of
returning to the zero position as requested with the RTZ
command. This bit will continue to indicate a logic
[1] until the
SPI message following a detection of the zero position, or the
RTZ feature is commanded OFF using the RTZ message.
• 0 = Return to Zero disabled
• 1 = Return to Zero enabled successfully
ACC14:ACC0 (OD14:OD0) — These 15 bits are from the
RTZ accumulator. They represent the integrated signal
present on the non-driven coil during an RTZ event. These
bits are logic
[0] after power-on reset, or after the RST pin
transitions from logic [0] to [1]. After an RTZ event, they will
represent the last RTZ accumulator result before the RTZ
was stopped. ACC14 is the MSB and is the sign bit used for
zero detection. Negative numbers have MSB logic
[1] and
are coded in two’s complement.
The analog-to-digital converter's linear input range covers
the expected magnitude of motor back e.m.f. signals, which
Figure 8. RTZ Accumulator (Typical)
is usually less than 500mV. Input signals greater than this will
not cause any damage (the circuit is connected to the motor
H-Bridge drivers, and thus is exposed to the full magnitude of
the drive voltages), but may cause some small loss of
linearity. A typical plot of output vs. input is shown in
Figure 8
for 4ms step times.
Gauge 0 Pointer Position Status Information
Most recent valid PECCR command resulting in the
Gauge 0 Pointer Position status output:
Table 23.
D11 D10 D9 D8
1 1 0 0
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 23

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 24. Gauge 0 Pointer Position Status Output Register
Bits OD15 OD14 OD13 OD12 OD11 OD10 OD9 OD8 OD7 OD6 OD5 OD4 OD3 OD2 OD1 OD0
Read ENB0 DIR0 DIRC0 CMD0 POS11 POS10 POS9 POS8 POS7 POS6 POS5 POS4 POS3 POS2 POS1 POS0
Write – – – – – – – – – – – – – – – –
The bits in Table 24 are read-only bits.
ENB0 (OD15) — This bit indicates whether Gauge 0 is
enabled.
• 0 = Disabled
• 1 = Enabled
DIR0 (OD14) — This bit indicates the direction Gauge 0 is
moving.
• 0 = Toward position 0
• 1 = Away from position 0
DIRC0 (OD13) — This bit is used to determine whether the
direction of the most recent pointer movement is toward the
last commanded position or away from it.
• 0 = Direction of the pointer movement is toward the
commanded position
• 1 = Direction of the pointer movement is away from the
commanded position
CMD0 (OD12) — This bit indicates whether Gauge 0 is at
the most recently commanded position.
• 0 = At commanded position
• 1 = Not at commanded position
POS11:POS0 (OD11:OD0) — These 12 bits represent the
actual position of the pointer at the time CS transitions to a
logic [0].
Gauge 1 Pointer Position Status Information
Most recent valid PECCR command resulting in the
Gauge 1 Pointer Velocity status output:
Table 25.
D11
1 1 0 1
D10 D9 D8
Table 26. Gauge 1 Pointer Position Status Output Register
Bits OD15 OD14 OD13 OD12 OD11 OD10 OD9 OD8 OD7 OD6 OD5 OD4 OD3 OD2 OD1 OD0
Read ENB1 DIR1 DIRC1 CMD1 POS11 POS10 POS9 POS8 POS7 POS6 POS5 POS4 POS3 POS2 POS1 POS0
Write – – – – – – – – – – – – – – – –
The bits in Table 26 are read-only bits.
ENB1 (OD15) — This bit indicates if Gauge 1 is enabled.
• 0 = Disabled
• 1 = Enabled
DIR1 (OD14) — This bit indicates the direction Gauge 1
pointer is moving.
• 0 = Toward position 0
• 1 = Away from position 0
DIRC1 (OD13) — This bit determines if the direction of the
most recent pointer movement is toward, or away from, the
last commanded position.
• 0 = At commanded position
• 1 = Not at commanded position
POS11:POS0 (OD11:OD0) — These 12 bits represent the
actual position of the pointer at the time
CS transitions to a
logic [0].
Gauge 0 and 1 Pointer Velocity Status Information
Most recent valid PECCR command resulting in the
0 and 1 Pointer Velocity status output:
Gauge
Table 27.
• 0 = Direction of the pointer movement is toward the
commanded position
• 1 = Direction of the pointer movement is away from the
commanded position
CMD1 (OD12) — This bit indicates if Gauge 1 is at the most
D11 D10 D9 D8
1 1 1 x
x = Don’t care.
recently commanded position.
33976
Analog Integrated Circuit Device Data
24 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 28. Gauge 0 and 1 Pointer Velocity Status Output Register
Bits OD15 OD14 OD13 OD12 OD11 OD10 OD9 OD8 OD7 OD6 OD5 OD4 OD3 OD21 OD1 OD0
Read 1V7 1V6 1V5 1V4 1V3 1V2 1V1 1V0 0V7 0V6 0V5 0V4 0V3 0V2 0V1 0V0
Write – – – – – – – – – – – – – – – –
The bits in Table 28 are read-only bits.
1V7:1V0 (OD15:OD8) — These 8 bits represent the step
table value that indicates the actual velocity step location
(refer to
Table 30, page 28) of the Gauge 1 pointer at the
time that the CS transitions to a logic [0].
Note For both sets of bits,1V7:1V0 and 0V7:0V0, if the
ramp is truncated with the RMPSELR, the velocity position
step that will be read when the pointer is no longer moving will
STATE MACHINE OPERATION
The two-phase step motor has maximum allowable
velocities and acceleration and deceleration.The purpose of
the step motor state machine is to drive the motor with
maximum performance while remaining within the motor’s
voltage, velocity, and acceleration constraints.
A requirement of the state machine is to ensure the
deceleration phase begins at the correct time and pointer
position. When commanded, the motor will accelerate
constantly to the maximum velocity, then move toward the
commanded position. Eventually, the pointer will reach the
calculated location where the movement has to decelerate,
slowing safely to a stop at the desired position. During the
be the velocity position that identifies it in the untruncated
ramp (e.g., if RS = 2, then the velocity step location will be 3
when the pointer is at the commanded position).
0V7:0V0 (OD7:OD0) — These 8 bits represent the step
table value that indicates the actual velocity step location
(refer to Table 30) of the Gauge 0 pointer at the time that the
CS transitions to a logic [0].
deceleration phase, the motor will not exceed the maximum
deceleration.
During normal operation, both step motor rotors are
microstepped with 24 steps per electrical revolution (see
Figure 9). A complete electrical revolution results in two
degrees of pointer movement. There is a second (smaller)
state machine in the IC controlling these microsteps. This
state machine receives clockwise or counter-clockwise index
commands at intervals, stepping the motor in the appropriate
direction by adjusting the current in each coil. Normalized
values are provided in
Table 29, page 26.
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 25

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
I
COIL
I
MAX
I
MAX
I
I
MAX
MAX
+
0
-
SINx
I
COIL
I
I
MAX
MAX
+
0
-
COSx
Clockwise Microsteps for PE6= 0
I
I
MAX
max
+
+
0
I
I
COIL
coil
-
I
I
COIL
coil
0
_
-
I
I
max
MAX
0 1 2 3 4 5 6
I
max
I
MAX
+
+
0
0
_
-
I
I
max
MAX
0 1 2 3 4 5 6 7 8 10 11 12
7 8 9 10
SINx
SINx
11
12 13 14 15 21 20 19 18
COSx
COS
x
13
15
14
17
16
16 17 18 9 23 22 21 20 19
22 23
FIGURE 6b. CW MICROSTEPS for PE6=1
Clockwise Microsteps for PE6=1
Figure 9. Clockwise Microsteps
Table 29. Coil Step Value
Step Angle
SINE
(Angle)*
0 0 0 1 0.866
1 15 0.259 0.965 0.966
2 30 0.5 0.866 1
3 45 0.707 0.707 0.966
4 60 0.866 0.5 0.866
5 75 0.966 0.259 0.707
33976
COS (Angle)*
PE6
= 0
COS (Angle -
30)*
PE6
= 1
Table 29. Coil Step Value
6 90 1 0 0.500
7 105 0.966 -0.259 0.259
8 120 0.866 -0.5 0
9 135 0.707 -0.707 -0.259
10 150 0.5 -0.866 -0.500
11 165 0.259 -0.966 -0.707
12 180 0 -1 -0.866
13 195 -0.259 -0.966 -0.966
Analog Integrated Circuit Device Data
26 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 29. Coil Step Value
14 210 -0.5 -0.867 -1
15 225 -0.707 -0.707 -0.966
16 240 -0.866 -0.5 -0.866
17 255 -0.966 -0.259 -0.707
18 270 -1 0 -0.500
19 285 -0.966 0.259 -0.259
20 300 -0.866 0.5 0
21 315 -0.707 0.707 0.259
22 330 -0.5 0.866 0.500
23 345 -0.259 0.966 0.707
* Denotes normalized values.
The motor is stepped by providing index commands at
intervals. The time between steps defines the motor velocity,
and the changing time defines the motor acceleration.
The state machine uses a table to define the allowed time
and also the maximum velocity. A useful side effect of the
table is that it also allows the direct determination of the
position at which the velocity should reduce to stop the motor
at the desired position.
The motor equations of motion are generated as follows.
(The units of position are steps, and velocity and acceleration
are in steps/second and steps/second².)
From an initial position of 0 with an initial velocity (u), the
motor position (s) at a time (t) is:
2
1
atuts +=
2
For unit steps, the time between steps is:
2
++−
auu
=⇒
t
2
a
This defines the time increment between steps when the
motor is initially travelling at a velocity u. In the ROM, this time
is quantized to multiples of the system clock by rounding
upwards, ensuring acceleration never exceeds the allowed
value. The actual velocity and acceleration is calculated from
the time step actually used.
Using|
v2 = u2 + 2as
and
v = u + at
and solving for v in terms of u, s, and t gives:
2
v =
/t - u
The correct value of t to use in this equation is the
quantized value obtained above.
From these equations a set of recursive equations can be
generated to give the allowed time step between motor
indexes when the motor is accelerating from a stop to its
maximum velocity.
Starting from a position p of 0 and a velocity v of 0, these
equations define the time interval between steps at each
position. To drive the motor at maximum performance, index
commands are given to the motor at these intervals. A table
∆
is generated giving the time step
p
v
⎡⎤
where indicates rounding up.
=
v
n
t at an index position n.
0
=
0
0
=
0
−
v
12−
∆
n
t
n
Pn = n
Note Pn = n. This means on the n th step the motor has
indexed by n positions and has been accelerating steadily at
the maximum allowed rate. This is critical because it also
indicates the minimum distance the motor must travel while
decelerating to a stop. For example, the stopping distance is
also equal to the current value of n.
The algorithm to drive the motor is similar to:
1. While the motor is stopped, wait until a command is
received.
2. Send index pulses to the motor at an ever-increasing
rate, according to the time steps in
Table 30 until:
a. The maximum velocity is reached, at which point
the time intervals stop decreasing, or
b. The distance remaining to travel is less than the
current index in the table. At this point, the stopping
distance is equal to the remaining distance, and to
ensure it will stop at the required position, the motor
must begin decelerating.
An example of the velocity table for a particular motor is
provided in
4800 microsteps/s (at 12 microsteps/degrees), and its
maximum acceleration is 54000 microsteps/s
Table 30. This motor’s maximum speed is
2
. The table is
quantized to a 1.0 MHz clock.
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 27

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 30. Velocity Table
Velocity
Position
0 0 0.00 76 380 2631.6 152 257 3891.1
1 27217 36.7 77 377 2652.5 153 256 3906.3
2 13607 73.5 78 374 2673.8 154 255 3921.6
3 11271 88.7 79 372 2688.2 155 254 3937.0
4 7970 125.5 80 369 2710.0 156 254 3937.0
5 5858 170.7 81 366 2732.2 157 253 3952.6
6 4564 219.1 82 364 2747.3 158 252 3968.3
7 3720 268.8 83 361 2770.1 159 251 3984.1
8 3132 319.3 84 358 2793.3 160 250 4000.0
9 2701 370.2 85 356 2809.0 161 249 4016.1
10 2373 421.4 86 354 2824.9 162 248 4032.3
11 2115 472.8 87 351 2849.0 163 248 4032.3
12 1908 524.1 88 349 2865.3 164 247 4048.6
13 1737 575.7 89 347 2881.8 165 246 4065.0
14 1594 627.4 90 344 2907.0 166 245 4081.6
Time
Between
Steps (µs)
Velocity
(µSteps/s)
Velocity
Position
Time
Between
Steps (µs)
Velocity
(µSteps/s)
Velocity
Position
Time
Between
Steps (µs)
Velocity
(µSteps/s)
15 1473 678.9 91 342 2924.0 167 244 4098.4
16 1369 730.5 92 340 2941.2 168 244 4098.4
17 1278 782.5 93 338 2958.6 169 243 4115.2
18 1199 834.0 94 336 2976.2 170 242 4132.2
19 1129 885.7 95 334 2994.0 171 241 4149.4
20 1066 938.1 96 332 3012.0 172 241 4149.4
21 1010 990.1 97 330 3030.3 173 240 4166.7
22 960 1041.7 98 328 3048.8 174 239 4184.1
23 916 1091.7 99 326 3067.5 175 238 4201.7
24 877 1140.3 100 324 3086.4 176 238 4201.7
25 842 1187.6 101 322 3105.6 177 237 4219.4
26 812 1231.5 102 321 3115.3 178 236 4237.3
27 784 1275.5 103 319 3134.8 179 235 4255.3
28 760 1315.8 104 317 3154.6 180 235 4255.3
29 737 1356.9 105 315 3174.6 181 234 4273.5
30 716 1396.6 106 314 3184.7 182 233 4291.8
31 697 1434.7 107 312 3205.1 183 233 4291.8
32 680 1470.6 108 310 3225.8 184 232 4310.3
33976
Analog Integrated Circuit Device Data
28 Freescale Semiconductor

Table 30. Velocity Table (continued)
FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Velocity
Position
33 663 1508.3 109 309 3236.2 185 231 4329.0
34 648 1543.2 110 307 3257.3 186 231 4329.0
35 634 1577.3 111 306 3268.0 187 230 4347.8
36 621 1610.3 112 304 3289.5 188 229 4366.8
37 608 1644.7 113 303 3300.3 189 229 4366.8
38 596 1677.9 114 301 3322.3 190 228 4386.0
39 585 1709.4 115 300 3333.3 191 227 4405.3
40 575 1739.1 116 298 3355.7 192 227 4405.3
41 565 1769.9 117 297 3367.0 193 226 4424.8
42 555 1801.8 118 295 3389.8 194 226 4424.8
43 546 1831.5 119 294 3401.4 195 225 4444.4
44 538 1858.7 120 293 3413.0 196 224 4464.3
45 529 1890.4 121 291 3436.4 197 224 4464.3
46 521 1919.4 122 290 3448.3 198 223 4484.3
47 514 1945.5 123 289 3460.2 199 222 4504.5
Time
Between
Steps (µs)
Velocity
(µSteps/s)
Velocity
Position
Time
Between
Steps (µs)
Velocity
(µSteps/s)
Velocity
Position
Time
Between
Steps (µs)
Velocity
(µSteps/s)
48 507 1972.4 124 287 3484.3 200 222 4504.5
49 500 2000.0 125 286 3496.5 201 221 4524.9
50 493 2028.4 126 285 3508.8 202 221 4524.9
51 487 2053.4 127 284 3521.1 203 220 4545.5
52 481 2079.0 128 282 3546.1 204 220 4545.5
53 475 2105.3 129 281 3558.7 205 219 4566.2
54 469 2132.2 130 280 3571.4 206 218 4587.2
55 464 2155.2 131 279 3584.2 207 218 4587.2
56 458 2183.4 132 278 3597.1 208 217 4608.3
57 453 2207.5 133 277 3610.1 209 217 4608.3
58 448 2232.1 134 275 3636.4 210 216 4629.6
59 444 2252.3 135 274 3649.6 211 216 4629.6
60 439 2277.9 136 273 3663.0 212 215 4651.2
61 434 2304.1 137 272 3676.5 213 215 4651.2
62 430 2325.6 138 271 3690.0 214 214 4672.9
63 426 2347.4 139 270 3703.7 215 214 4672.9
64 422 2369.7 140 269 3717.5 216 213 4694.8
65 418 2392.3 141 268 3731.3 217 212 4717.0
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 29

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Table 30. Velocity Table (continued)
Velocity
Position
66 414 2415.5 142 267 3745.3 218 212 4717.0
67 410 2439.0 143 266 3759.4 219 211 4739.3
68 406 2463.1 144 265 3773.6 220 211 4739.3
69 403 2481.4 145 264 3787.9 221 210 4761.9
70 399 2506.3 146 263 3802.3 222 210 4761.9
71 396 2525.3 147 262 3816.8 223 209 4784.7
72 393 2544.5 148 261 3831.4 224 209 4784.7
73 389 2570.7 149 260 3846.2 225 208 4807.7
74 386 2590.7 150 259 3861.0
75 383 2611.0 151 258 3876.0
Time
Between
Steps (µs)
Velocity
(µSteps/s)
Velocity
Position
Internal Clock Calibration
Timing-related functions on the 33976 (e.g., pointer
velocities, acceleration, and Return To Zero Pointer speeds)
depend upon a precise, consistent time reference to control
the pointer accurately and reliably. Generating accurate time
references on an integrated circuit can be accomplished. For
example trimming can be used however, it tends to be costly
due to the large amount of die area required for trim pads.
Another possibility is an externally generated clock signal;
however, this requires a dedicated pin on the device and
controller. An alternate approach would require the use of an
additional crystal or resonator, which is expensive.
The internal clock in the 33976 is temperature
independent and area efficient; however, it can vary by as
much as ±35 percent due to process variation. Using the
existing SPI inputs and the precision timing reference already
available to the microcontroller, the 33976 allows more
accurate clock calibration to within ±10 percent.
Calibrating the internal 1.0 MHz clock is initiated by writing
[1] to PECCR bit PE3 (see Figure 10, page 30). The
a logic
Time
Between
Steps (µs)
Velocity
(µSteps/s)
Velocity
Position
ideally result in an internal 33976 clock speed of 1.0
The pulse is sent on the
CS pin immediately after the SPI
word is sent. During the calibration, no other SPI lines should
be toggled. At the moment the CS pin transitions from
[1] to logic [0], an internal 7-bit counter counts the
logic
number of cycles of an internal, 8.0 MHz clock. The counter
stops when the CS pin transitions from logic [0] to logic [1].
The value in the counter represents the number of cycles of
MHz clock occurring in the 8.0 µs window; it should
the 8.0
range from 32 to 119. An offset is added to this number to
help center or skew the calibrated result to generate a
desired maximum or nominal frequency. The modified
counter value is truncated by 4
bits to generate the calibration
divisor, which should range from 4 to 15. The 8.0
is divided by the calibration divisor, resulting in a calibrated
1.0 MHz clock. If the calibration divisor lies outside the range
of 4 to 15, the 33976 flags the CAL bit in the device status
register, indicating the calibration procedure was not
successful. A clock calibration is allowed only if the gauges
are disabled or the pointers are not moving, as indicated by
status bits MOV1 and MOV0 (
Table 20, page 21).
Time
Between
Steps (µs)
8.0 µs calibration pulse is then provided by the controller to
Velocity
(µSteps/s)
MHz.
MHz clock
D15
SI
SCLK
CS
PECCR Command
D0
8.0
µ
s Calibration Pulse
Figure 10. Gauge Enable and Clock Calibration Exa m pl e
33976
Analog Integrated Circuit Device Data
30 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Some applications may require a guaranteed maximum
pointer velocity and acceleration. Guaranteeing these
maximums requires that the nominal internal clock frequency
falls below 1.0
MHz. The frequency range of the calibrated
clock will always be below 1.0 MHz if PECCR bit PE4 is
logic [0] prior to initiating a calibration command, followed by
µs reference pulse. The frequency will be centered at
an 8.0
1.0
MHz if bit D4 is logic [1].
The 33976 can be fooled into calibrating faster or slower
than the optimal frequency by sending a calibration pulse
longer or shorter than the intended 8.0
µs. As long as the
calibration divisor remains between 4 and 15 there will be no
clock calibration flag. For applications requiring a slower
calibrated clock
— e.g., a motor designed with a gear ratio of
120:1 (8 microsteps/deg) — the user wil l have to provide a
longer calibration pulse. The device allows a SPI-selectable
slowing of the internal oscillator, using the PECCR command,
so that the calibration divisor safely falls within the 4-to-15
range when calibrating with a longer time reference. For
example, for the 120:1 motor, the pulse would be 12
µs
instead of 8.0 µs. The result of this slower calibration results
in the longer step times necessary to generate pointer
movements meeting acceleration and velocity requirements.
The resolution of the pointer positioning decreases from
deg/microstep (180:1) to 0.125 deg/microstep (120:1)
0.083
while the pointer sweep range increases from approximately
degrees to over 500 degrees.
340
Note Be aware that a fast calibration could result in
violations of the motor acceleration and velocity maximums,
resulting in missed steps.
Pointer Deceleration
Constant acceleration and deceleration of the pointer
produces relatively choppy movements when compared to
those of an air core gauge. Modifying the velocity position
ramp during deceleration can create the desired damped
movement. This modification is accomplished by adding
repetitive steps at several of the last velocity position step
values as the pointer decelerates. The 33976 allows the user
to tailor the response characteristics to the application with
three independent ramp characteristic variables. The RS,
HCP and HC variables can be used to change the slowest
velocity position steps, the number of Hold Counts, and the
number of ramp positions to which the Hold Counts apply.
More information is available in the RMPSEL description and
in the example shown in
Figure 11. If the maximum
acceleration and deceleration of the pointer is desired, the
Hold Counts can be disabled dynamically by either writing a
[1] to the global Hold Count Disable bit, PECCR bit PE5,
logic
or to the HE0 or HE1 bits of the POS0R or POS1R,
respectively.
D
D
e
e
c
c
e
e
l
l
e
e
24
24
24
r
r
23
23
23
a
a
t
t
22
22
22
e
e
21
21
21
20
20
20
19
19
19
18
18
18
17
17
17
VELOCITY
VELOCITY
POSITION
POSITION
Position =
Position =
Position = 0
24
24
24
24
23
23
23
23
22
22
22
22
21
21
21
21
20
20
20
20
19
19
19
19
18
18
18
18
17
17
17
17
16
16
16
16
15
15
15
15
14
14
14
14
13
13
13
13
elerate
elerate
12
12
12
12
c
c
c
c
11
11
11
11
A
A
10
10
10
10
9
9
9
9
8
8
8
8
7
7
7
7
6
6
6
6
5
5
5
5
4
4
4
4
3
3
3
3
2
2
2
2
1
1
1
1
0
0
0
For this example:
For this example:
• RS = 0
• RS = 0
• HC = 3
• HC = 3
• HCP = 1
• HCP = 1
Figure 11. Deceleration Ramp
Return to Zero Calibration
Many step motor applications require that the IC detect
when the motor is stalled after commanded to return to the
zero position for calibration purposes. The stalling occurs
when the pointer hits the end stop on the gauge bezel, which
is usually at the zero position. It is important that when the
pointer reaches the end stop it immediately stops without
bouncing away.
The 33976 device provides the ability to automatically and
independently return each of the two pointers to the zero
position via the RTZR and RTZCR SPI commands. An
automatic RTZ is initiated using the RZ0, RZ1, and RZ2 bits
First Velocity w/ Hold Counts = HCP ×8 + RS = 8 + 0 = 8
First Velocity w/ Hold Counts = HCP ×8 + RS = 8 + 0 = 8
Initial Velocity Position = RS + 1 = 0 + 1 = 1
Initial Velocity Position = RS + 1 = 0 + 1 = 1
Last Velocity w/ Hold Counts = RS + 2 = 0 + 2 = 2
16
16
16
15
15
15
14
14
14
13
13
13
12
12
12
Last Velocity w/ Hold Counts = RS + 2 = 0 + 2 = 2
Hold Counts per Step = HC = 3
11
11
11
10
10
10
9
9
9
MICROSTEPS
MICROSTEPS
Hold Counts per Step = HC = 3
8
8
7
7
6
6
5
5
4
4
3
3
2
2
1
1
0
0
provided the RZ4 bit is a logic [0]. Unconditional RTZ
movement is initiated using the RZ0, RZ1, and RZ2 bits
provided the RZ4 bit is a logic
[1]. During an RTZ event, all
commands related to the gauge being returned are ignored
until the pointer has successfully zeroed or the RTZR bit RZ1
is written to disable the event. Once an RTZ event is initiated,
the device reports back via the SO pin that an RTZ is
underway.
The RTZCR command is used to set the RTZ pointer
speed, choose an appropriate blanking time, and preload the
integration accumulator with an appropriate offset. On
reaching the end stop, the device reports back to the
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 31

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
microcontroller via the status message that the RTZ was
successful. The RTZ automatically disables, allowing other
commands to be valid. In the event the master determines an
RTZ sequence is not working properly (i.e., the RTZ taking
too long), it can disable the command via the RTZR bit RZ1.
RTZCR bits RC10:RC5 are written to preload the
accumulator with a predetermined value that will assure an
accurate pointer stall detection. This preloaded value is
determined during application development by disabling the
automatic shutdown feature of the device with the RTZR bit
RZ4. This operating mode allows the master to monitor the
RTZ event, using the accumulator information available via
the SO if the device is configured to provide the RTZ
I
MAX
I
COIL
I
MAX
0
01 2 30
Accumulator Status. The unconditional RTZ event can be
turned OFF using the RTZR bit RZ1.
If the Position 0 location bit is in the default logic [0] mode,
then during an RTZ event the pointer is returned counterclockwise (CCW) using full steps at a constant speed
determined by the RTZCR RC3:RC0 and RC12:RC11 bits
during RTZ configuration (see
Figure 12). Full steps are used
during an RTZ so that only one coil of the motor is being
driven at any time. The coil not being driven is used to
determine if the pointer is moving. If the pointer is moving, the
EMF signal that is present in the non-driven coil is processed
by integrating the signal present on the opened pin of the coil
while essentially grounding the other end.
SINE
I
MAX
I
COIL
I
MAX
0
01 2 30
Figure 12. Full Steps Counterclockwise
The IC automatically prepares the non-driven coil at each
step, waits for a predetermined blanking time, then
processes the signal for the duration of the full step. When
the pointer reaches the stop and no longer moves, the
dissipating flux is detected. The processed results are placed
in the RTZ accumulator, then compared to a decision
threshold. If the signal exceeds the decision threshold, the
pointer is assumed to be moving. If the threshold value is not
exceeded, the drive sequence is stopped if RTZR bit RZ4 is
[0]. If bit RZ4 is logic [1], the RTZ movement will
logic
continue indefinitely until the RTZR bit RZ1 is used to stop the
RTZ event.
A pointer that is not on a full step location or that is in
magnetic alignment prior to the RTZ event may cause a false
RTZ detection. More specifically, an RTZ event beginning
from a non-full step position may result in an abbreviated
integration value potentially interpreted as a stalled pointer.
Advancing the pointer by at least 12 microsteps clockwise (if
COSINE
PE7 = 0) to the nearest full step position (e.g., 0, 6, 12, 18,
24, etc.) prior to initiating an RTZ ensures the magnetic fields
line up and increases the chances of a successful pointer
stall detection. It is important that the pointer be in a static, or
commanded, position before starting the RTZ event.
Because the time duration and the number of steps the
pointer moves prior to reaching the commanded position can
vary depending upon its status at the time a position change
is communicated, the master should assure sufficient
elapsed time prior to starting an RTZ. If an RTZ is desired
after first enabling the outputs or after forcing a reset of the
device, the pointer should first be commanded to move
microsteps clockwise to the nearest full step location.
12
Because the pointer was in a static position at default, the
master could determine the number of microsteps the device
has taken by monitoring and counting the MOV0. MOV1
device status bit transitions to confirm the pointer is again in
a static position. Alternatively, the user could monitor the
device status bits CMD1 and CMD2.
33976
Analog Integrated Circuit Device Data
32 Freescale Semiconductor

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
It should be pointed out that the flux value, for an ideal
motor with the coils perfectly aligned at 90°, will vary little
from full step to full step if all other variables (e.g.,
temperature) are held constant. The full steps are evenly
spaced which results in equidistant movement as the motor
is full stepped.
In comparison, motors that have coils aligned at a 60°
angle will result in two distinct flux values as the coils are
driven in the same full step fashion. This lack of symmetry in
the measured flux is due to the difference in the electrical
angles between full steps. In other words, the distance that
the rotor moves changes from full step to full step. This
difference can be observed in
Figure 9 and Table 29. In
Figure 9, where PE6 = 0, the difference in microsteps
between alternating full steps (one coil at maximum current
while the other is at zero) is always six. In contrast, as seen
Figure 9, where PE6 = 1, the difference in microsteps
in
between full steps of the 60° coils alternates between four
and eight. These expected differences need to be taken into
account when setting the RTZ threshold.
Only one gauge at a time can be returned to the zero
position. The gauge not returning to zero can continue to be
controlled. An RTZ should not begin until the gauge to be
calibrated is at a static position and its pointer is at a full step
position. An attempt to calibrate a gauge while the other is in
the process of an RTZ even t is ignored by the devic e. In most
applications of the RTZR command, it is possible to avoid a
visually obvious sequential calibration by first bringing the
pointers back close to their previous zero positions, then recalibrating them sequentially.
After completion of an RTZ, the 33976 automatically
assigns the zero-step position to the full step position at the
end-stop location. Because the actual zero position could lie
anywhere within the full step where the zero was detected,
the assigned zero position could be within a window of ±0.5
degree. An RTZ can be used to detect stall, even if the
pointer already rests on the end stop when an RTZ sequence
is initiated. However, it is recommended the pointer be
advanced by at least 12
microsteps to the nearest full step
prior to initiating the RTZ.
RTZ OUTPUT
During an RTZ event the non-driven coil is analyzed to
determine the state of the motor. The 33976 multiplexes the
coil voltages and provides the signal from the non-driven coil
to the RTZ pin.
DEFAULT MODE
Default mode refers to the state of the 33976 after an
internal or external reset prior to SPI communication. An
internal reset occurs during V
below 4.0
driven to a logic
V. An external reset is initiated by the RST pin
[0]. With the exception of the RTZCR full step
power-up or if V
DD
time and the RMPSEL Register values, all of the specific pin
functions and internal registers will operate as though all of
the addressable configuration register bits were set to
[0]. This means, for example, all of the outputs will be
logic
PWR
falls
disabled after a power-up or external reset, and SO flag OD6
and OD8 are set, indicating an undervoltage event. Anytime
an external reset is exerted and the default is restored, all
configuration parameters (e.g., clock calibration, maximum
speed, RTZ parameters, etc.) are lost and must be reloaded.
FAULT LOGIC REQUIREMENTS
The 33976 device indicates each of the following faults as
they occur:
•Overtemperature fault
•Undervoltage V
•Overvoltage V
PWR
PWR
•Clock out of spec
These fault bits remain enabled until they are clocked out
of the SO pin with a valid SPI message.
Overcurrent faults are not reported directly; however, it is
likely an overcurrent condition will become a thermal issue
and be reported.
Overtemperature Fault Requirements
The 33976 incorporates overtemperature protection
circuitry, which shuts off the affected gauge driver when
excessive temperatures are detect ed . In the eve nt of a
thermal overload, the affected gauge driver is automatically
disabled. The overtemperature fault is flagged via the OT0
and/or OT1 device status bits. The indicating flag continues
to be set until the affected gauge is successfully re-enabled,
provided the junction temperature has fallen to a temperature
below the hysteresis level.
OVERVOLTAGE FAULT REQUIREMENTS
The device is capable of surviving V
the maximum specified in
V
levels resulting in an Overvoltage Shutdown condition
PWR
Maximum Ratings table, page 4.
can result in uncertain pointer positions. Therefore, the
pointer position should be re-calibrated. The master will be
notified of an overvoltage event via th e SO pi n if th e de vi ce
status is selected. Overvoltage detection and notification
occurs regardless of whether the gauge(s) are enabled or
disabled.
Overcurrent Fault Requirements
Output currents are limited to safe levels allowing the
device to rely on thermal shutdown to protect itself.
Undervoltage Fault Requirements
Undervoltage V
conditions may result in uncertain
PWR
pointer positions. Therefore, the internal clock and the pointer
position may require re-calibration. The state machine
continues with V
voltage levels as low as 4.0 V; however,
PWR
the coil voltages may be clipped. The master can be notified
of an undervoltage event via the SO pin.
voltages within
PWR
RESET (SLEEP MODE)
The device can reset internally or externally. If the VDD
level falls below the V
level (refer to the Static Electrical
DDUV
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 33

FUNCTIONAL DEVICE OPERATION
LOGIC COMMANDS AND REGISTERS
Characteristics table under POWER INPUT, page 5), the
device resets and powers up in the Default mode. Similarly,
If the RST pin is driven to a logic [0], the device resets to its
default state. The device consumes the least amount of
current (IDD and I
) when the RST pin is logic [0]. This is
PWR
also referred to as the Sleep mode.
33976
Analog Integrated Circuit Device Data
34 Freescale Semiconductor

TYPICAL APPLICATIONS
TYPICAL APPLICATIONS
The 33976 is an extremely versatile device that can be
used in a variety of applications. The fl exibility has been
significantly improved, over that of the older MC33991 and
MC33970 devices, with the addition of the Velocity Ramp
configuration features that are available in the RMPSEL
6000.0
5000.0
33991
4000.0
33991
Ideal Acceleration
3000.0
(4500 deg/s^2)
Speed (usteps / s)
2000.0
1000.0
register (see
Table 31). Some applications (e.g., high
performance tachometers) require responsive pointers that
change directions quickly. Figure 10 shows some
characteristics of the ramp modifications that are possible
with the RMPSELR RS bit.
13ms 63ms
33976 (RS = 4)
33970
or
33976
Default
GDIC MC33991
GDIC MC33970 or MC33976 default
Ideal Accelerati on (4500 deg/s^2)
GDIC MC33976 ramp w/first step = 5
0.0
0 20000 40000 60000 80000 100000 120000 140000 160000 180000
Time (us)
Time (µs)
Figure 13. Start / Stop Response Characteristics
Other applications (e.g., speedometers and fuel
indicators) require smooth, low speed movement. For these
applications, the damping of the pointer can be optimized
with the HC and HCP bits of the RMPSELR.
Figure 14,
page 36, gives several examples of different damping
characteristics that are possible with the device. Once
configured, the damping can be dynamically enabled and
disabled using the HE bits of the Position registers.
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 35

TYPICAL APPLICATIONS
1250
1200
33970
33976
33976 Default
(16, 5 ≡ HCP×8, HC)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
NO HOLDS GDIC 1.5 64,4 32-4 16-5 8-4
33970
Figure 14. 33976 Damping Response Examples
Table 31 provides a step-by-step example of configuring
and using many of the features designed into the IC. This
example is intended to give a generic overview how the
Time (s)
64, 4
32, 4
16, 5
device could be used. Further, it is intended to familiarize
users with some of its capabilities.
1150
1100
1050
1000
950
900
850
800
Positi on (usteps)
Position (microsteps)
8, 4
Table 31. 33976 Setup, Configuration, and Usage Example
Step Command Description
1 PECCR
2 RTZCR
Enable Gauges
Bit PE0: Gauge 0
Bit PE1: Gauge 1
Clock Calibration
Bit PE3: Enables Calibration Procedure
Bit PE4: Set clock f = 1.0 MHz maximum or nominal
Send 8.0 µs pulse on CS to calibrate 1.0 MHz clock
Set RTZ Full Step Time
Bits RC3:RC0
Set RTZ Blanking Time
Bit RC4
Preload RTZ Accumulator
Bits RC12:RC11 and RC10:RC5
Check SO for an Out-of-Range Clock Calibration
Is bit CAL logic [1]? If so, then repeat Steps 1 and 2
Reference Table
and/or Figure
Table 7 (page 14),
Figure 10
(page 30)
Table 12
(page 18),
Table 13 (page 18)
Table 14 (page 19)
Table 7 (page 14),
Table 20 (page 21)
33976
Analog Integrated Circuit Device Data
36 Freescale Semiconductor

Table 31. 33976 Setup, Configuration, and Usage Example (continued)
TYPICAL APPLICATIONS
Step Command Description
3 POS0R
4 POS1R
5 PECCR
6 RTZ
7 PECCR
Move pointer to position 12 prior to RTZ Table 9 (page 16)
Move pointer to position 12 prior to RTZ Table 10 (page 16)
Check SO to see if Gauge 0 has moved
Is bit MOV0 (OD4) logic [1]? If so, then the Gauge 0 has moved to the first microstep
Send null command to see if gauges have moved
Bit PE12
Check SO to see if Gauge 0 (Gauge 1) has moved
Is bit MOV0 (OD4) (MOV1 (OD5)) logic [1]? If so, then Gauge 0 (Gauge 1) moved another
microstep. Keep track of movement and if 12 steps are finished and both gauges are at
a static position, then RTZ. Otherwise, repeat steps (a) and (b)
Bit CMD0 (OD10) (CMD1 (OD11)) could also be monitored to determine that the pointer
is static
Return one gauge at a time to the zero stop using RTZ command
Bit RZ0 selects the gauge
Bit RZ1 is used to enable or disable an RTZ
Bits RZ2 is used to select the direction (along with PE7)
Select the RTZ accumulator bits to clock out on the SO bits using bits PE11:PE10. These
will be used if characterizing the RTZ.
Check the Status of the RTZ by sending the null command to monitor SO bit RTZ0, RTZ1 of
Device Status SO
Bit PE12 is the null command
Reference Table
and/or Figure
Table 7 (page 14),
Table 20 (page 21)
Table 7 (page 14)
Table 7 (page 14),
Table 20 (page 21)
Table 11 (page 17)
Table 7 (page 14),
Table 22 (page 23)
Table 7 (page 14),
Table 20 (page 21)
8 RTZ
9 PECCR
10 VELR
11 POS0R
Is RTZ0 (OD2) logic [0]? If not, Gauge 0 still returning and null command should be resent
Return the other gauge to the zero stop. If the second gauge is driving a different pointer than
the first, a new RTZCR command may be required to change the Full Step time
Check the Status of the RTZ by sending the null command to monitor SO, bit RTZ1 (OD3)
Bit PE12 is the null command
Is RTZ1 (OD3) logic [0]? If not, Gauge 1 still returning and null command should be resent
Change the maximum velocity of the gauge
Bits V8:V9 determine which gauge(s) will change the maximum velocity
Bits V7:V0 determine the maximum velocity position from Table 30, Velocity Table
Position Gauge 0 pointer
Bits P011:P00: Desired Pointer Position
Check SO for Out-of-Range V
Bit OVUV (OD6) logic [1]? If so, use UV (OD8) and OV (OD9) to decide whether to RTZ
after valid V
Check SO for overtemperature
Bit OT0 logic [1]? If so, enable driver again. If OT0 continues to indicate overtemperature,
shut down Gauge 0
If RTZ0 returns to normal, re-establish the zero reference by RTZ command
PWR
PWR
Table 11 (page 17)
Table 7 (page 14),
Table 20 (page 21)
Table 7 (page 15),
Table 30 (page 28)
Table 9 (page 16),
Table 30 (page 28)
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 37

TYPICAL APPLICATIONS
Table 31. 33976 Setup, Configuration, and Usage Example (continued)
Step Command Description
12 POS1R
Position Gauge 1 pointer
Bits P1 11:P1 0: Desired Pointer Position
Check SO for Out-of-Range V
PWR
Bit OVUV logic [1]? If so, use UV (OD8) and OV (OD9) to decided whether to RTZ after
valid V
PWR
Check SO for overtemperature
Bit OT1 logic [1]? If so, enable driver again. If OT1 continues to indicate overtemperature,
shut down Gauge 1.
If OT1 returns to normal, re-establish the zero reference by RTZ command
13 POS0R
Return the pointers close to zero position using POS0R
Move pointer position at least 12 microsteps CW to the nearest full step prior to RTZ
14 POS1R
Return the pointers close to zero position using POS1R
Move pointer position at least 12 microsteps CW to the nearest full step position prior to RTZ
Check SO to see if Gauge 0 has moved
Bit MOV0 logic [1]? If so, Gauge 0 moved to the first microstep
15 PECCR
Send null command to see if gauges have moved
Bits PE12
Check SO to see if Gauge 0 (Gauge 1) moved
Bit MOV0 (MOV1) logic [1]? If so, Gauge 0 (Gauge 1) moved another microstep. Keep
track of movement. If 12 steps are finished, and both gauges are at a static position, then
RTZ. Otherwise repeat steps (a) and (b)
Bit CMD0 (OD10) (CMD1 (OD1)) could also be monitored to determine that the pointer is
static
Reference Table
and/or Figure
Table 10 (page 16),
Table 30 (page 28)
Table 9 (page 16)
Table 10 (page 16)
Table 10 (page 16),
Table 20 (page 21)
Table 7 (page 14),
Table 20 (page 21)
16 RTZ
17 PECCR
18 RTZ
19 PECCR
20 PECCR
Return one gauge at a time to the zero stop using RTZ command
Bit RZ0 selects the gauge
Bit RZ1 is used to enable or disable an RTZ
Bit RZ2 is used to select the direction (along with PE7)
Select the RTZ accumulator bits clocking out on the SO bits using bits PE11:PE10. These
will be used if characterizing the RTZ
Check the status of the RTZ by sending the null command to monitor SO bit RTZ0
Bit PE12 is the null command
Is RTZ0 logic [0]? If not, Gauge 0 still returning and null command should be resent
Return the other gauge to the zero stop. If the second gauge is driving a different pointer than
the first, a new RTZCR command may be required to change the Full Step time
Check the status of the RTZ by sending the null command to monitor SO bit RTZ1
Bit PE12 is the null command
Is RTZ1 logic [0]? If not, Gauge 1 still returning and null command should be resent
Disable both gauges and go to standby
Bit PE0:PE1 are used to disable the gauges
Put the device to sleep
RST pin is pulled to logic [0]
Table 7 (page 14),
Table 11 (page 17),
Table 22 (page 23)
Table 7 (page 14),
Table 20 (page 21)
Table 11 (page 17),
Table 14 (page 19)
Table 7 (page 14),
Table 20 (page 21)
Table 11 (page 17)
Table 7 (page 14)
33976
Analog Integrated Circuit Device Data
38 Freescale Semiconductor

PACKAGE DIMENSIONS
PACKAGING
PACKAGING
PACKAGE DIMENSIONS
For the most current package revision, visit www.freescale.com and perform a keyword search using the “98A” listed below.
DW SUFFIX
EG SUFFIX (PB-FREE)
24-LEAD SOICW
PLASTIC PACKAGE
98ASB42344B
ISSUE F
33976
Analog Integrated Circuit Device Data
Freescale Semiconductor 39

REVISION HISTORY
REVISION HISTORY
REVISION DATE DESCRIPTION OF CHANGES
3.0
4.0
8/2006
1/2007
• Implemented Revision History page
• Converted to Freescale format
• Updated package drawing
• Corrected symbol labels on Microstep Output (Measured Across Coil Outputs) and
Output Flyback Clamp
• Added maximum pointer calculation on page 16
• Corrected detect threshold upper range from 4081 to 1009
• Changed internal clock variation from 35% to 70%
• Changed EMF to flux on page 31
• Added MCZ33976EG/R2 to the Ordering Information block.
• Revised Internal Block Diagram to enhance readability
• Added parameter Peak Package Reflow Temperature During Reflow
and notes
• Added ADC Gain
(4)
and
(5)
(10), (14)
• Made wording additions to Address 101 — Gauge Return to Zero Configuration Register
on page 17 and RC12:RC11 = M; default value = 00 on page 18
• Added RTZ Accumulator (Typical) on page 23 and accompanying te xt
(11)
to Static Electrical Characteristics table
(4), (5)
on page 4
33976
Analog Integrated Circuit Device Data
40 Freescale Semiconductor

How to Reach Us:
Home Page:
www.freescale.com
Web Support:
http://www.freescale.com/support
USA/Europe or Locations Not Listed:
Freescale Semiconductor, Inc.
Technical Information Center, EL516
2100 East Elliot Road
Tempe, Arizona 85284
+1-800-521-6274 or +1-480-768-2130
www.freescale.com/support
Europe, Middle East, and Africa:
Freescale Halbleiter Deutschland GmbH
Technical Information Center
Schatzbogen 7
81829 Muenchen, Germany
+44 1296 380 456 (English)
+46 8 52200080 (English)
+49 89 92103 559 (German)
+33 1 69 35 48 48 (French)
www.freescale.com/support
Japan:
Freescale Semiconductor Japan Ltd.
Headquarters
ARCO Tower 15F
1-8-1, Shimo-Meguro, Meguro-ku,
Tokyo 153-0064
Japan
0120 191014 or +81 3 5437 9125
support.japan@freescale.com
Asia/Pacific:
Freescale Semiconductor Hong Kong Ltd.
Technical Information Center
2 Dai King Street
Tai Po Industrial Estate
Tai Po, N.T., Hong Kong
+800 2666 8080
support.asia@freescale.com
For Literature Requests Only:
Freescale Semiconductor Literature Distribution Center
P.O. Box 5405
Denver, Colorado 80217
1-800-441-2447 or 303-675-2140
Fax: 303-675-2150
LDCForFreescaleSemiconductor@hibbertgroup.com
RoHS-compliant and/or Pb-free versions of Freescale products have the functionality
and electrical characteristics of their non-RoHS-compliant and/or non-Pb-free
counterparts. For further information, see http://www.freescale.com or contact your
Freescale sales representative.
For information on Freescale’s Environmental Products program, go to http://
www.freescale.com/epp.
Information in this document is provided solely to enable system and software
implementers to use Freescale Semiconductor products. There are no express or
implied copyright licenses granted hereunder to design or fabricate any integrated
circuits or integrated circuits based on the information in this document.
Freescale Semiconductor reserves the right to make changes without further notice to
any products herein. Freescale Semiconductor makes no warranty, representation or
guarantee regarding the suitability of its products for any particular purpose, nor does
Freescale Semiconductor assume any liability arising out of the application o r use of any
product or circuit, and specifically disclaims any and all liability, including without
limitation consequential or incidental damages. “Typical” parameters that may be
provided in Freescale Semiconductor data sheet s and/or specifications can and do vary
in different applications and actual performance may vary over time. All operating
parameters, including “Typicals”, must be validated for each customer application by
customer’s technical experts. Freescale Semiconductor does not convey any license
under its patent rights nor the rights of others. Freescale Semiconductor products are
not designed, intended, or authorized for use as components in systems intended for
surgical implant into the body, or other applications intended to support or sustain life,
or for any other application in which the failure of the Freescale Semiconduct or product
could create a situation where personal injury or death may occur. Should Buyer
purchase or use Freescale Semiconductor products for any such unintended or
unauthorized application, Buyer shall indemnify and hold Freescale Semiconductor and
its officers, employees, subsidiaries, affiliates, and distributors harmless against all
claims, costs, damages, and expenses, and reasonable attorney fee s arising out of,
directly or indirectly, any claim of personal injury or death associated with such
unintended or unauthorized use, even if such claim alleges that Freescale
Semiconductor was negligent regarding the design or manufacture of the part.
Freescale™ and the Freescale logo are trademarks of Freescale Semiconductor, Inc.
All other product or service names are the property of their respective owners.
© Freescale Semiconductor, Inc., 2007. All rights reserved.
MC33976
Rev 4.0
1/2007
 Loading...
Loading...