

Page 1
(3rd Floor) No.9 Haitai Fazhan Sixth Avenue XiQing
District Tianjin China
Email:
support1@foxtechfpv
.com Web:
www.foxtechfpv.com
FOXTECH SEEKER-30 TIR 30X Optical Zoom Camera with 3-axis Gimbal
Warning and Disclaimer
Make sure not to adjust the gimbal or change its mechanical structure by yourself. Be
sure to mount the camera to gimbal before power on,and then install the gimbal on
the aircraft.
To avoid gimbal performance degradation or damage caused by imbalanced
payload,please do not add other peripherals for the gimbal camera (filter,hood,etc).
When in aerial photography,make sure your aircraft flight control system is working
at the safe mode.
We strongly recommend that you remove aircraft propellers before doing gimbal
configuration.Use extra non-power battery for gimbal.Keep children away from the
preset flight region.
Considering that we are not able to control user's specific usage,installation,
assembly,modification ( including the use of non-specified parts ),and improper use.
Direct or indirect damage or injury caused by the behavior above, our company will
not cover any loss and responsibility.
Page 2
(3rd Floor) No.9 Haitai Fazhan Sixth Avenue X i Qing
District Tianjin China
Email:
support1@foxtechfpv
.com W e b :
www.foxtechfpv.com
F
eatures
:
- W e i g h t : 1 400g(camerasincluded)
- 1/2.8inch2.13MP Exmor R C M O S sensor
- 30X optical zoom,1080P/60 H D M I output f o r v i d e o downlink
- 1080P/30 H.264 v i d e o recorded f o r on-board TFc a r d
-Thermal c a m e r a : 640x480, 25HZ, 2X,4 X digital zooming
-Autoobjecttrackingfunction
-Geotag,gimbal Y a w / P i t c h angle info,height,time will bedisplayed
- PWMc o n t r o l andserial command c o n t r o l
- Convenient wiring hubf o r R C receiver andv i d e o output
- 3-aixs highstabilized gimbal system
- Adjustable c o n t r o l speed: SLOWspeed f o r large zoom range,accurate.FAST speed
f o r small zoom range,sensitive andquick.
- O n e k e y backt o homeposition
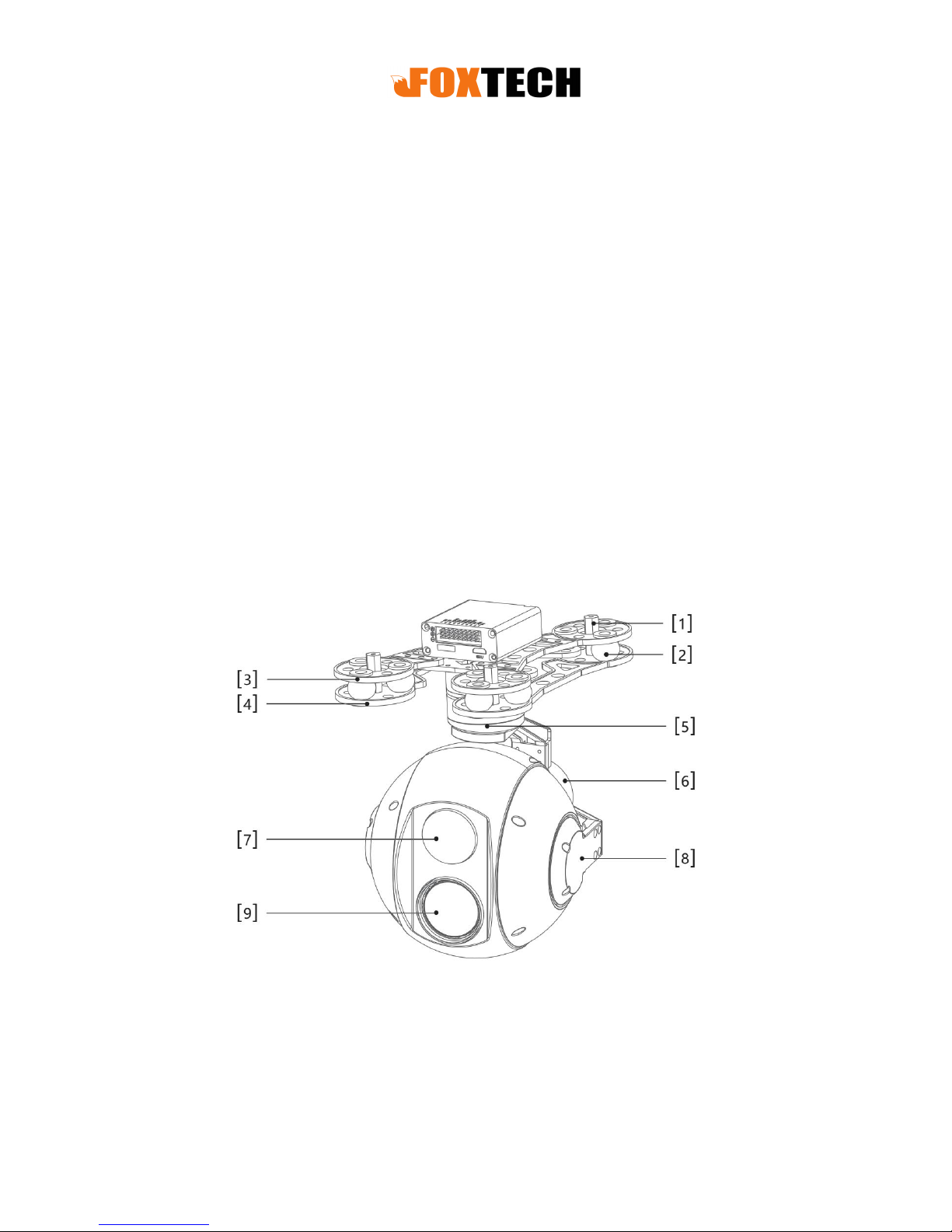
Gimbal
:
[1]Copper mounting s t a n d o f f [2]Rubber damper
[3]Upper damperboard [4]Lower damper board
[5]Yaw a x i s motor [6]Roll a x i s motor
[7]Thermal C a m e r a [8]Pitch a x i s motor
[9]Daylight H D z o o m c a m e r a
Page 3
(3rd Floor) No.9 Haitai Fazhan Sixth Avenue XiQing
District Tianjin China
Email:
support1@foxtechfpv
.com Web:
www.foxtechfpv.com
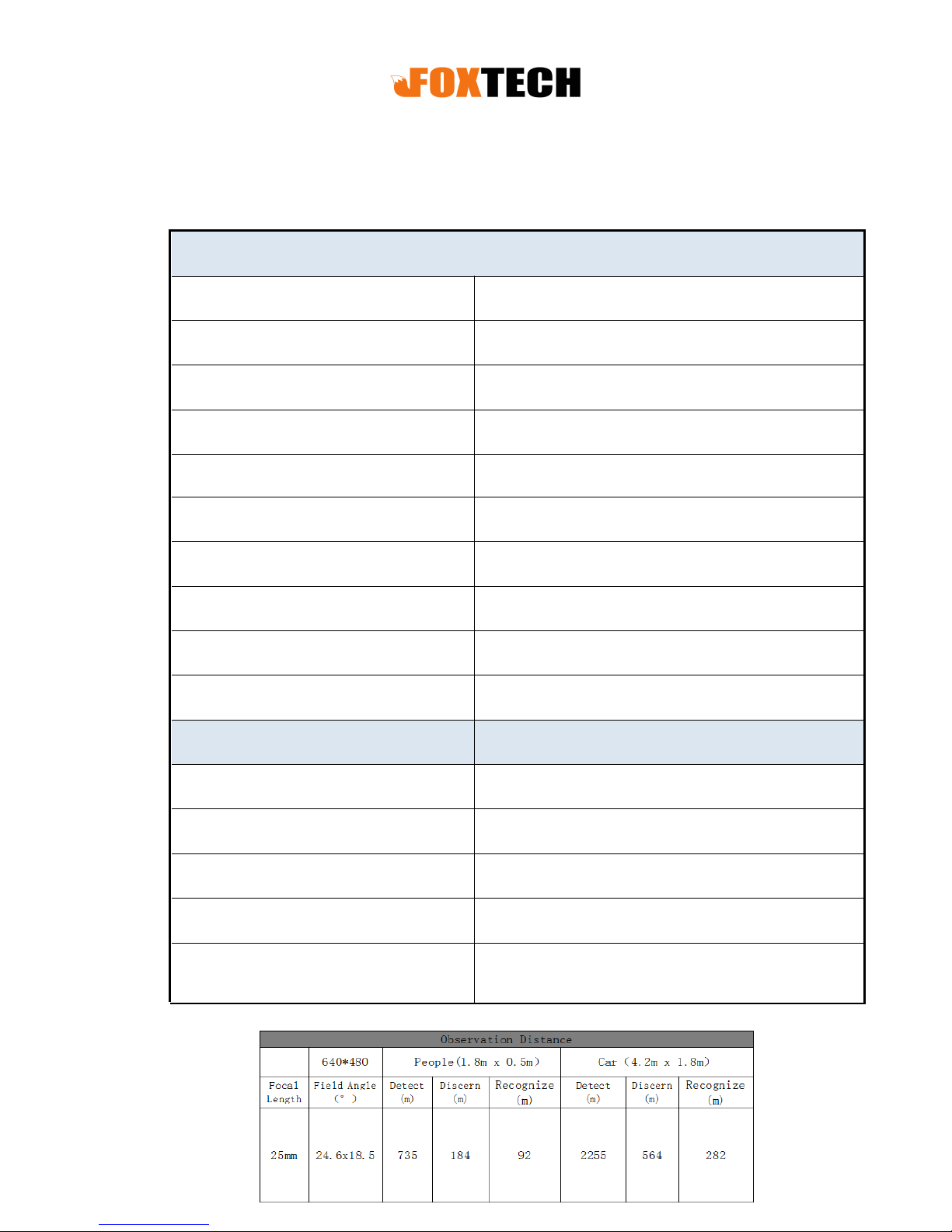
Specification
30X zoom camera
Sensor
1/2.8 inch 2.13MP Exmor R CMOS SENSOR
Video output 1080P/60 HDMI
Video recorded 1080P/30 H.264
Focal length 30X optical focal zoom,4.3-129mm
Wide Dynamic Up to 105dB
Auto focus Less than 1S
Low illumination
0.01lux@F1.6
Aperture
Φ 16.0
Vertical Roll / Horizon Mirror/Static Support
AWB/AGC/ACC/ Support
Gimbal system
Input voltage 4S-6S
Rotate range Pitch:±90° Roll:±85° Yaw:±170°
Angle amount of jitter Pitch and roll:±0.01° Yaw:±0.01°
Control interface PWM and serial command
Working Current
Static current:400mA(@16V)
Dynamic current:500mA(@16V)
Page 4
(3rd Floor) No.9 Haitai Fazhan Sixth Avenue XiQing
District Tianjin China
Email:
support1@foxtechfpv
.com Web:
www.foxtechfpv.com
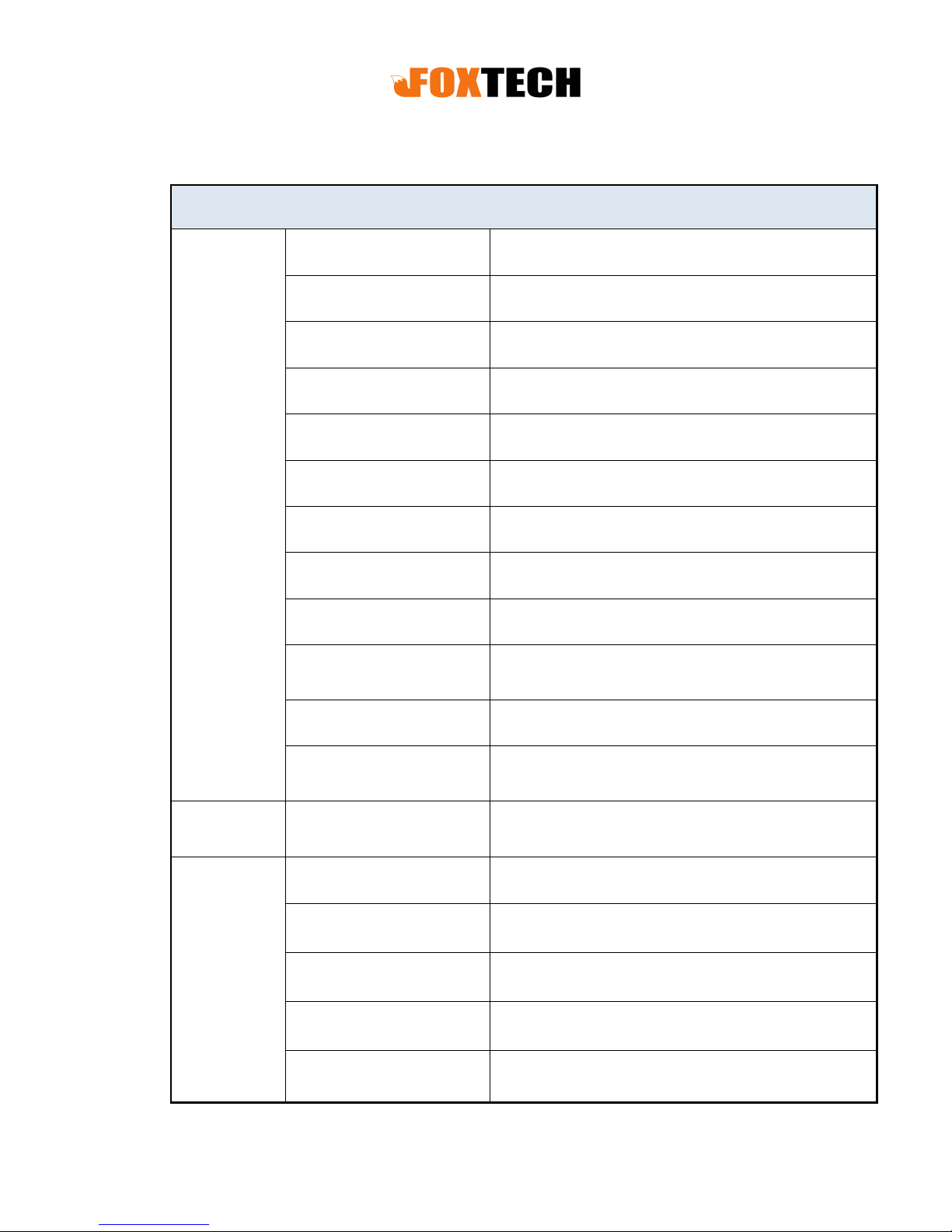
Thermal camera
Imaging Index
Working system Un-cooled long wave (8μm~14μm)
Detector pixels 640×480
Pixel size 17μm
Focusing Athermalizing
Emissivity correction Emissivity 0.01~1 adjustable
NETD ≤50mK(@25℃)
MRTD ≤650mK(@Characteristic frequency
)
Image enhancement
Automatically adjusts image brightness and contrast
Color palette Black hot, white hot, pseudo color
Automatic non-uniformity
correctionfunction
Yes(with or without shutter)
Digital zoom 2X,4X
Time synchronization
function
Yes
Temperature
warning
Warning temperature -20
℃~
120
℃
Tracking
index
Target Memory Time
4S
Data refresh rate 25Hz
Output lag
<3
ms
Tracking velocity ±32 pix/frame
Target size 16x16 pixels to128x128 pixels
Page 5

(3rd Floor) No.9 Haitai Fazhan Sixth Avenue X i Qing
District Tianjin China
Email:
support1@foxtechfpv
.com W e b :
www.foxtechfpv.com
Gimbalwiring hub drawing
Dimension
Page 6

(3rd Floor) No.9 Haitai Fazhan Sixth Avenue X i Qing
District Tianjin China
Email:
support1@foxtechfpv
.com
W e b :
www.foxtechfpv.com
Installation
Gimbalandcameracontrol v i a P W M
Page 7

(3rd Floor) No.9 Haitai Fazhan Sixth Avenue X i Qing
District Tianjin China
Email:
support1@foxtechfpv
.com W e b :
www.foxtechfpv.com
Gimbalc o n t r o l
1)Yawa x i s control:speed mode,connect Stick channel(or 3-position switch channel,
p u s h stick t o middle position t o s t o p )
2)Pitcha x i s control:speed mode,connect Stick channel(or 3-position switch
channel,push stick t o middle position t o s t o p )
3)Modecontrol:angle mode,connect k n o b channel(speed mode:connect
3-position channel orr o c k e r channel)
I f connecting k n o b channel,rotate t o oneend,the gimbal is a t lowest s p e e d w h e n
controlling Y A W andPITCHa x i s .
Rotate thek n o b t o anyposition,gimbal isa t higher s p e e d w h e n controlling Y A W and
PITCHaxis.Rotate t o k n o b t o anotherend,gimbal backt o c e n t e r position.
4)Multi:tracking control,connect 3-position switch channel
Middle tolow:quit tracking mode,cursor disappear
Low t o middle:go t o trackingmode,cursor appear
Middle t o high:one square appears,object islocked,tracking isactivated
Middle t o highagain:re-track mode,cursor appears in thesquare.Gimbal is still
trackingtheobject,now y o u c a n movethec u r s o r t o trackanother object(middle t o
highstick again) .
Cameracontrol
1)Zoomcontrol:daylight sensor zoom control,connect 3-position switch orr o c k e r
channel
2)Focus:Picture inpictures w i t c h andpaletteswitch,connect 3-position switch
channel. Middle toLow:palette s w i t c h .
Middle toHigh:picture inpictures w i t c h .
3)PIC/REC:taking picture/recording,connect 3-position switch channel
Middle t o high,recording s t a r t
Middle t o highagain, r e c o r d i n g s t o p
Middle t o low, t a k i n g picture
Middle t o low, t a k i n g another picture
Page 8

(3rd Floor) No.9 Haitai Fazhan Sixth Avenue X i Qing
District Tianjin China
Email:
support1@foxtechfpv
.com W e b :
www.foxtechfpv.com
GPSdataoverlayandserialportw i r i n g diagram
GPS B a u d rate:115200,8,1,null
Serial portswill beneeded(marked bytheblack box,seephotoabove),please connect
R X 1 andR X 2 , T X 1 andTX2,withw i r e jumper.TX andR X frome x t e r n a l serial cable
connect t o TX3andR X 3 respectively.GND frome x t e r n a l serial cable connect t o GND
ofthewiring hub.
P l e a s e notice:DONOTconnect 5Va n d GNDt o theportsm a r k e d b y theblackbox.
M o d e function description(connect “MODE”to k n o b channel)
Page 9

(3rd Floor) No.9 Haitai Fazhan Sixth Avenue X i Qing District Tianjin China
Email:
support1@foxtechfpv
.com W e b :
www.foxtechfpv.com
Rotate k n o b t o position-3:low speed lock mode.The gimbal will movea t thelowest
speed w h e n controlling Y A W andPITCH,andgimbal Y A W a x i s will notfollow drone
flight direction.
Rotate k n o b t o any position e x c e p t position-3:variable speed follow mode.Gimbal
speed will bef a s t e r ( t h e speed depends ontheangle y o u rotate theknob,the bigger
thef a s t e r ) .
Rotate k n o b t o position-1,gimbal backt o homeposition.
Flip 1 timebetween position 2 andposition 1,gimbal goes backt o homeposition
Flip 2 timesbetween position 2 andposition 1,gimbalgoes t o speed mode.
Flip 3 timesbetween position 2 andposition 1,gimbalgoes t o angle mode.
Flip 4 timesbetween position 2 andposition 1,gimbalgoes t o accelerometer
calibration
Flip 5 timesbetween position 2 andposition 1,gimbla goes t o gyro calibration
Notice:gimbalwill g o e s t o gyro calibration automatically ifthegimbal s t a y s s t i l l w i t h
thepoweron.Thegimbal will w o r k s in themodethatis usedlast time.Thef a c t o r y
w o r k modef o r thegimbal isangle mode.
Page 10

FH336-TR
3 6X witht r a c k i n g connect block
USER BOARD
controller box
H D M I : microH D M I OUTPUT
1080P 60fps default
SD card:max128G
,
class10
F A T 3 2 ore x F A T f o r m a t
5 V output
G N D
P W M i n
TTL115200/8/1/N
RX
T X
Page 11

S.bus/Rx : connect t o R x 2 f o r t r a c k function.
Roll/ T x : connect t o T x 2 f o r t r a c k function.
Pitch: : PWMin,pitchcontrol
Y a w : PWM in, Y a w control
1 PITCHUP俯仰向上
2 PITCHSTOP 俯仰停止
3 PITCHDOWN俯仰向下
1 Y a w r i g h t
2 Y a w s t o p
3 Y a w left
1 pitchup
2 pitchs t o p
3 pitchdown
M o d e : change t h e speed / homeposition
1 2 3
Position 1 : lowests p e e d f o r pitchandy a w .
Position 2 : middle s p e e d f o r pitchandy a w .
Position 3 : highest s p e e d f o r pitchandy a w . t h e s p e e d is continuously
quickly from1 t o 3 .
C l i c k = from2 t o 3 andbackt o 2 quickly.
Onec l i c k : homeposition
T w o c l i c k : look down
T h r e e c l i c k : Y a w notfollowed byframe
Fourc l i c k : Y a w followed byframe
Fivec l i c k : restoret h e f a c t o r y settings
Page 12

ZOOM: zoom t h e camera f o c u s : f o c u s t h e camera
1 zoom t e l e
2 s t o p zoom
3 zoom w i d e
1 f o c u s t e l e
2 s t o p f o c u s
3 f o c u s near
Pic/Rec : picture / s t a r t record, s t o p r e c o r d
M u l t i : t r a c k i n g control
A V : N O A V output t h i s model。
1
2
3
Switch 2 t o 1 :
s t a r t record /s t o p r e c o r d .
s t a r t r e c o r d , t h e OSDdisplay r e c hh:mm:ss ;
Stop r e c o r d , t h e OSDdisplay STBY.
Switch 2 t o 3 : t a k e a picture .
OSDdisplay ‘ R E C IMG’ a second.
1
2
3
Position 1 : e x i t t h e t r a c k i n g
Switch 1 t o 2: display t h e crosscursor.Adjust t h e objectt o t h e crosscursor.
Switch 2 t o 3 : s t a r t t r a c k i n g .
Change t h e objectduring t r a c k i n g
Switch 3 t o 2: display t h e crosscursor, usePitch/Yawt o adjust t h e crosscursor.
Switch 2 t o 3 : s t a r t t r a c k i n g .
 Loading...
Loading...