

Page 1

Foxtech Nimbus VTOL V2
for Mapping and Survey(DA16S Combo)
User Manual
V5.0
2019.05
Page 2
Contents
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Specications 2
BasicTheory 3
SetupandCalibration 4
Assembly 4
Check Radio Control 4
Download Mission Planner 4
Connect Baby Shark to Computer 4
Connect the Datalink and Check Flight Controller 7
ChecklistbeforeEveryFlight 13
TestFlight 14
Autopilot 16
Applications 17
Appendix 18
2
3
4
4
4
4
4
7
13
14
16
17
18
ESC Calibration 18
Servo Checking and Required Mode Modication 20
Angle Deviation Compensation Checking 23
Default Setttings 25
!Firmware Update Notice
Update Notice(Sep 6th, 2018)
Pixhawk Connections
18
20
23
25
27
27
28
©
2019 FOXTECH All Rights Reserved
1
Page 3
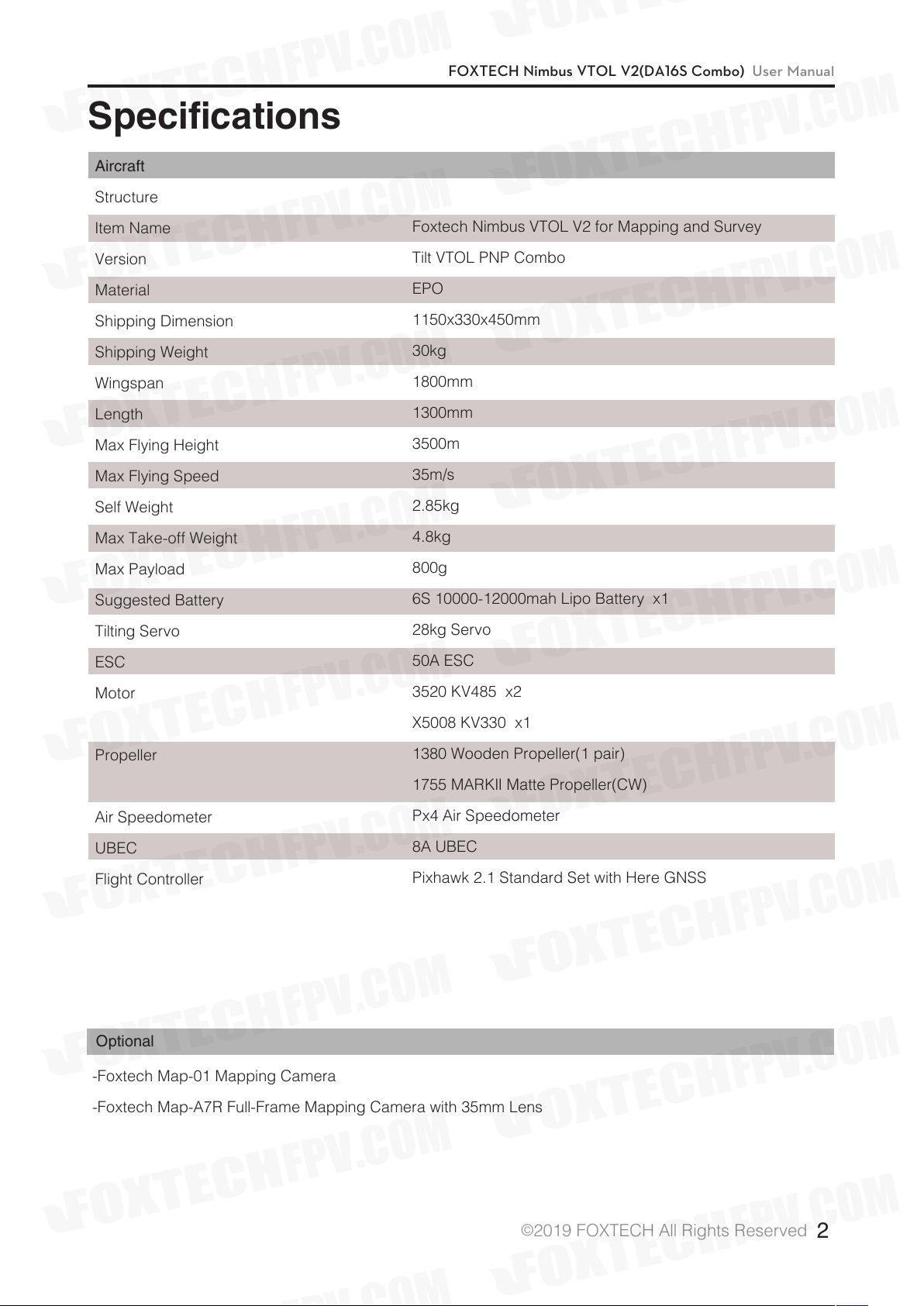
Specifications
Aircraft
Structure
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Item Name
Version
Material
Shipping Dimension
Shipping Weight
Wingspan
Length
Max Flying Height
Max Flying Speed
Self Weight
Max Take-off Weight
Max Payload
Suggested Battery
Tilting Servo
ESC
Foxtech Nimbus VTOL V2 for Mapping and Survey
Tilt VTOL PNP Combo
EPO
1150x330x450mm
30kg
1800mm
1300mm
3500m
35m/s
2.85kg
4.8kg
800g
6S 10000-12000mah Lipo Battery x1
28kg Servo
50A ESC
Motor
Propeller
Air Speedometer
UBEC
Flight Controller
Optional
-Foxtech Map-01 Mapping Camera
-Foxtech Map-A7R Full-Frame Mapping Camera with 35mm Lens
3520 KV485 x2
X5008 KV330 x1
1380 Wooden Propeller(1 pair)
1755 MARKII Matte Propeller(CW)
Px4 Air Speedometer
8A UBEC
Pixhawk 2.1 Standard Set with Here GNSS
©
2019 FOXTECH All Rights Reserved
2
Page 4

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Basic Theory
Foxtech Nimbus V2 is a Vertical Take-off and Landing airplane. It is equipped with new landing gears. The
foldable tail landing gear and front landing gear. The front landing gear ensure enough space for mapping
cameras or zoom cameras, and will protect the task loads.
In this version, we equip 28kg high speed tilting servos, with the newly upgraded system, the plane can
hover like a multicopter more steadily and take off and land in very heavy wind. And the front motor is
Foxtech 3520 kv520, which is more powerful, the new power system has great power redundency, and
makes the mapping version more efficient, which can lift max 800g payload.
The highlight of Nimbus V2 is the wind resistant feature. It means that when the plane is in multicopter
positioning mode, or in Auto mode, during taking off and landing stage, the two tilting motors will tilt to a
certain level to compensate the wind, that keeps your plane much stable and also give you much better
safty during landing and taking off stage. With the newly upgraded motors, the max flying speed can reach
35m/s, the average speed is 15m/s to 16m/s, and the stall speed is 10m/s-11m/s.
Another new feature is the new radio control-DA16S, specially designed for VTOL like this Nimbus, and also
suitable for other Foxtech series drones. It is 16-channel radio which has datalink and radiolink built inside,
so both the datalink and radiolink can reach a range of 5km. You also could equipped the range booster
and high-quality antenna to increase the distance to 15km.
Nimbus VTOL V2 also has a big inner space, can put lots of batteries and other equipments. And the quick-
detached design makes Nimbus VTOL V2 easy to assembly and dissembly, and transport.
This Nimbus V2 can be equipped with Foxtech Map-01 and Map-A7R mapping cameras to do mapping and
survey, when you use this Nimbus to do mapping, also could equipped Nimbus with RTK, and PPK system
to increase the map precision.
Foxtech Nimbus VTOL V2 is a cost-effective plane compared with other expensive multicopters or
fixedwings, it is a good option for customers to do mapping jobs and long range inspection.
By using the very advanced flight controller Pixhawk 2.1, the plane can take off, fly waypoints and land all by
itself, in this case, doing long range FPV or survey can never been easier!
The image below shows two typical motor rotation directions.
©
2019 FOXTECH All Rights Reserved
3
Page 5
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Setup and Calibration
Assembly
When you receive the Nimbus 1800 VTOL PNP combo, almost all components are installed, but there are
still a few connections to be done before flight.
- Connect the V tail.
- Connect the left and right wings.
- Connect the airspeed sensor.
- Connect the datalink antennas.
- Connect the receiver antennas.
- Connect the propellers.
- Place the battery on the board.
- Connect the nose.
1. Pay attention to the directions of propellers. (Refer to the above diagram)
2. If your purchase include a mapping camera, install the camera and power it on. If there is a
sound“crack”, It means the mapping camera works fine.
(View From the Front) (View From the Front)
CCW
CW
CW
(Overlook)
Check Radio Control
1.Install the extension antennas if your purchase include it.
2.Check channels on the transmitter.
Download Mission Planner
Download the latest Mission planner online or copy it from the SD card.
Download link: http://firmware.ardupilot.org/Tools/MissionPlanner/
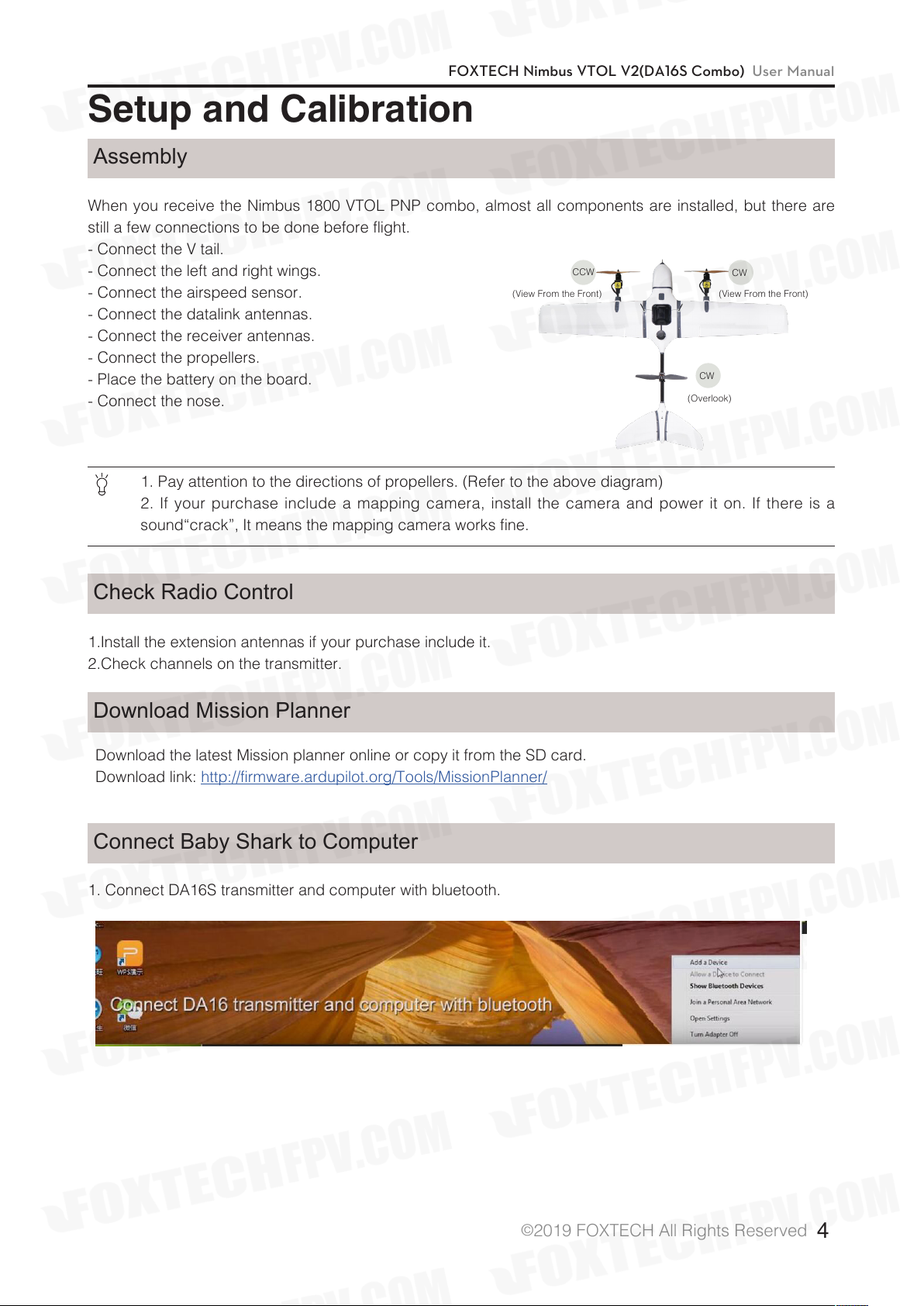
Connect Baby Shark to Computer
1. Connect DA16S transmitter and computer with bluetooth.
©
2019 FOXTECH All Rights Reserved
4
Page 6
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
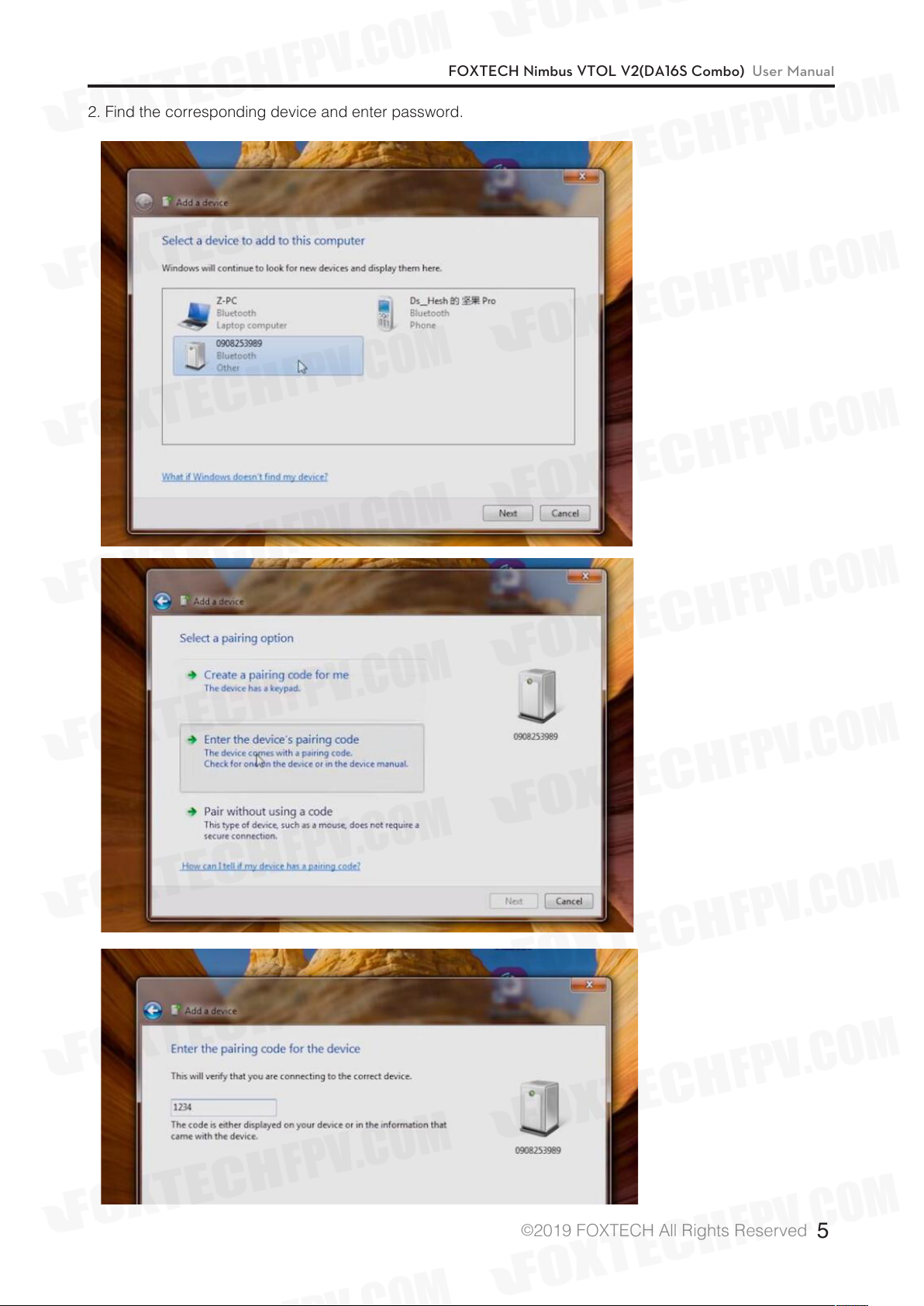
2. Find the corresponding device and enter password.
©
2019 FOXTECH All Rights Reserved
5
Page 7

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
3. Enter the "Device Manager" interface and find its COM.
4. Select correct Com port, and click CONNECT.
©
2019 FOXTECH All Rights Reserved
6
Page 8
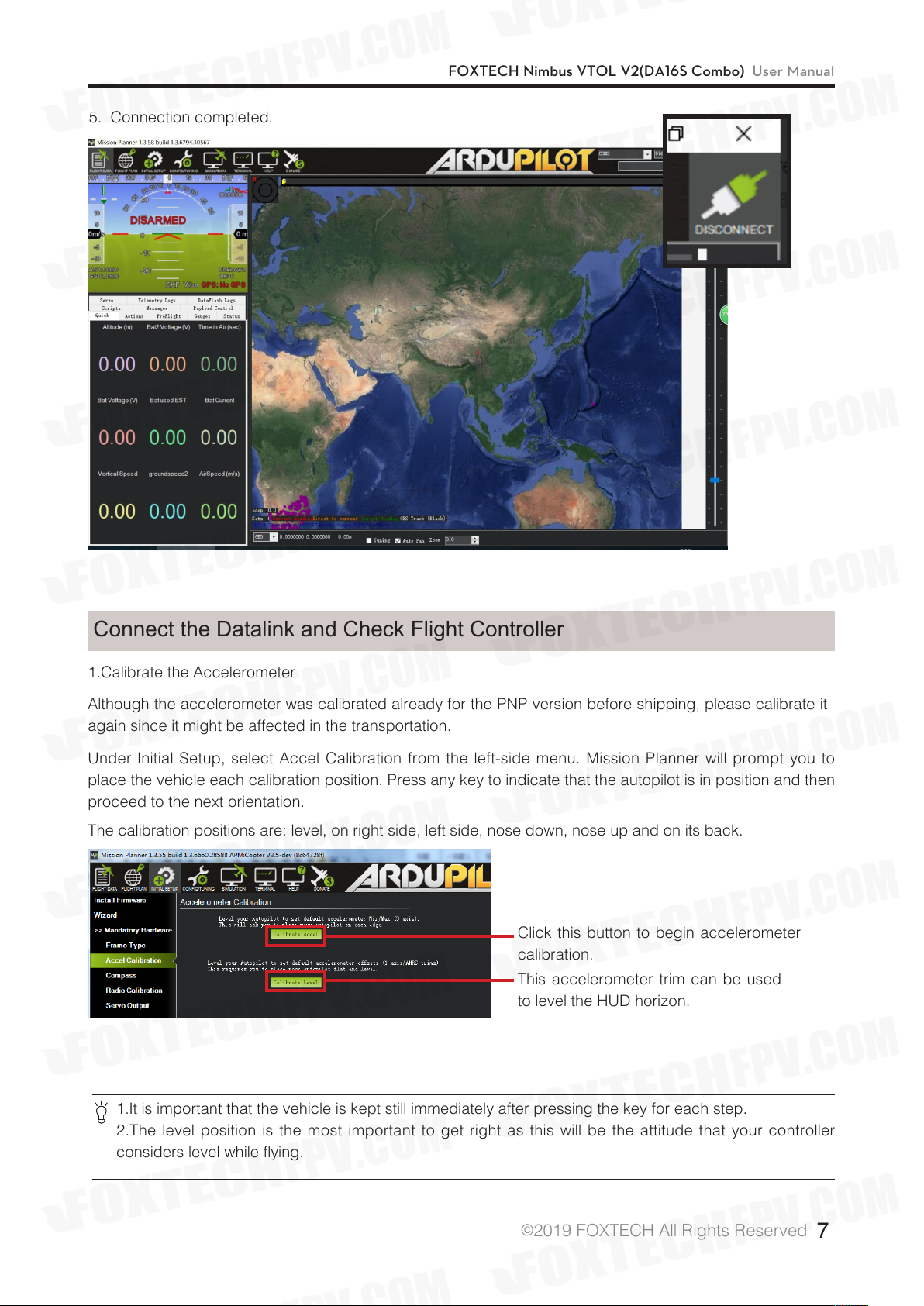
5. Connection completed.
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Connect the Datalink and Check Flight Controller
1.Calibrate the Accelerometer
Although the accelerometer was calibrated already for the PNP version before shipping, please calibrate it
again since it might be affected in the transportation.
Under Initial Setup, select Accel Calibration from the left-side menu. Mission Planner will prompt you to
place the vehicle each calibration position. Press any key to indicate that the autopilot is in position and then
proceed to the next orientation.
The calibration positions are: level, on right side, left side, nose down, nose up and on its back.
Click this button to begin accelerometer
calibration.
This accelerometer trim can be used
to level the HUD horizon.
1.It is important that the vehicle is kept still immediately after pressing the key for each step.
2.The level position is the most important to get right as this will be the attitude that your controller
considers level while flying.
©
2019 FOXTECH All Rights Reserved
7
Page 9

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
2. Calibration the Compass
Nimbus VTOL uses high sensitivity compass and it has to be re-calibrated when fly in a new place.
Enter the compass setting page and click”start” ,hold the plane and rotate it in order to hit all directions on
a sphere to calibrate the compass, when it’s done,a new offset would be given to the flight controller, and a
reboot is necessary.
Onboard calibration produces better results.
3. Radio Control Calibration
Calibrating each of the transmitter controls/channels is a straightforward process - simply move each of the
enabled sticks/switches through their full range and record the maximum and minimum positions.
©
2019 FOXTECH All Rights Reserved
8
Page 10

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
©
2019 FOXTECH All Rights Reserved
9
Page 11

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
4. Check Flight Modes(Cruise, QHover, QLoiter)
©
2019 FOXTECH All Rights Reserved
10
Page 12

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
5. Calibrate the Airspeed Sensor
It is critical that you calibrate airspeed meter to ensure that it is working correctly, and ensure that it is
correctly zeroed.
After you start up APM on your aircraft you should wait at least 1 minute for your electronics to warm up,
preferably longer, and then do a pre-flight calibration of your airspeed sensor. Your ground station software
should have a menu for doing this, usually called “Preflight Calibration”. You need to loosely cover your
airspeed sensor to stop wind from affecting the result, then press the button. The calibration will take a
couple of seconds.
Choosing that action will re-calibrate both your ground barometric pressure and your airspeed sensor.
Next you should check that your airspeed sensor is working correctly before takeoff. To do that you should
blow into the airspeed sensor and make sure that the "AS" airspeed sensor value in your HUD rises as you
blow into it.
6. Check the Battery Voltage
If you find the voltage is not correct, Enter the voltage according to the hand-held volt meter in the “Measured
Battery Voltage” field, Press tab or click out of the field and the “Voltage Divider (Calced)” value will update
and the “Battery voltage (Calced)” should now equal the measured voltage.
©
2019 FOXTECH All Rights Reserved
11
Page 13

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
7. Check Before Flight
(1) Connect the internet and load the map.
(2) The plane direction should be same with its direction in mission planner, if not, please calibrate again.
(3) Check plane status, altitude, voltage airspeed meter working fine.
©
2019 FOXTECH All Rights Reserved
12
Page 14

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Checklist before Every Flight
Make sure all items are checked before every flight.
1. The aircraft connection is stable and normal.
2. All screws and nuts are not loose.
3. The propeller is in the normal direction and is fastened.
4. All the Rudders' direction-correction are correct.
5. The airspeed meter reads correctly.
6. Aircraft voltage is normal.
7. The compass is toward the right direction.
8. More than 15 GPS satellites, or displays GPS FIX.
9. No warning words on the ground station.
10. Device SD card is normal.
11. Recording device is recording normally.
12. Aerial survey camera photo test is normal.
13. Exposure check is normal.
14. The remote controller power is normal.
15. Ground station power is normal.
16. Data connection strength is normal.
17. Aircraft H point positioning is normal.
18. Upload and download to check the routes.
19. The antenna is placed in the normal direction, the antenna of the aircraft is facing down or up, and the
two antennas of the receiver are not in contact.
20. Ground device recording is on.
21. Aircraft onboard camera is turned on.
22. Height setting of Return Home Point is normal.
23. Out of control return-to-lanuch setting is normal.
24. Try to vertically take off and land, make sure the direction-correction and direction control are normal
Start flying.
©
2019 FOXTECH All Rights Reserved
13
Page 15

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Test Flight
Before the first flight, it’s suggest to check if every component is well connected, tilting servos working
properly, motors spinning to the correct direction and all control surfaces are moving to the desired
directions.
It’s suggested to use 3 modes, Cruise, Qhover and Qloiter as the labled modes on a three position switch.
It’s suggested to do the first flight in a very open area with no buildings or big trees around, and a flat taking
off area is necessary.
Use the Qhover(or Qloiter) mode, start the motors by pushing the rudder all to the right with the throttle at
the lowest position, the motors should start to spin, gradually increase the throttle until the plane is ready
to lift from the ground, move aileron, elevator and rudder stick gently to check if the plane is moving as
desired.
Continue to push the throttle until the plane is lifted from ground, it may swing a bit since there should be big
airflow hitting the wing, lift the plane to around 3 meters and try to fly it as a multicopter, it should not be a
problem for anyone who can play a multicopter.
When you are familiar with all controls, lift the plane to at least 30m from the ground and make sure there is
not obstacle in front of the plane.
Switch it to Cruise mode, the Nimbus should tilt the two front motors together to gather speed, once the
speed is reaching at least 12m/s, the front motors will tilt straight and rear motor stops spinning, then the
Nimbus is now transferred to fixed wing.
It’s also suggested to active the short and long failsafe, the default action is respectively CIRCLE and RTH.
So in case the plane lose RC control, it will go back all by itself.
©
2019 FOXTECH All Rights Reserved
14
Page 16

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
You can fly a while and see if the plane could go straight, if you find the plane is tilting left for example, don’t
try to trim the aileron with your radio, the trim to aileron(SERVO1) must be done in parameter setting. (If
the elevator trim is necessary, please trim the SERVO2 and SERVO4 at the same time with the same trim
amount.)
If everything goes well, you can try to land. First, reduce the altitude by pushing forward the elevator and
when the altitude is around 30m above the ground, switch to Qhover(or Qloiter) Mode, two front motors
will tilt upwards to 60degrees, the plane will glide a while until the speed is lower than 12m/s, then the front
motors will tilt straight up and the plane is then become a multicopter again, then you can land it just as a
normal multicopter.
©
2019 FOXTECH All Rights Reserved
15
Page 17

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Autopilot
After the first flight, you can try to do autopilot.
You can choose to take off and land either by manual control or automatically.
To use automatic taking off and landing, you can change the first waypoint to VTOL_TAKE OFF, and set an
altitude like 30 or 50m for this action, then set the next waypoint a bit far (like 100m ) from the first waypoint,
the Nimbus will take off as a multicopter, when it reaches the wanted altitude, it will switch to fixed wing and
fly waypoints or missions like a fixed wing.
The VTOL landing is also the similar, you can set the last waypoint to VTOL_LAND, but it’s suggested to set
one waypoint which is around 100m from this one, since the plane will try to turn to multicopter before the
last waypoint, if the waypoint before VTOL_LAND is too far, the Nimbus VTOL will finish the final distance all
in multicopter mode, the power consumption in mutlicopter mode is 5 times more than in fixed wing mode.
©
2019 FOXTECH All Rights Reserved
16
Page 18

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Applications
- Survey
- 3D Survey
- Patrol
- FPV
- Air pollution detection
More autopilot mode can be found in Mission planner manual, like circle survey, Grid, drop an object with
hook at desired waypoint.
©
2019 FOXTECH All Rights Reserved
17
Page 19
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
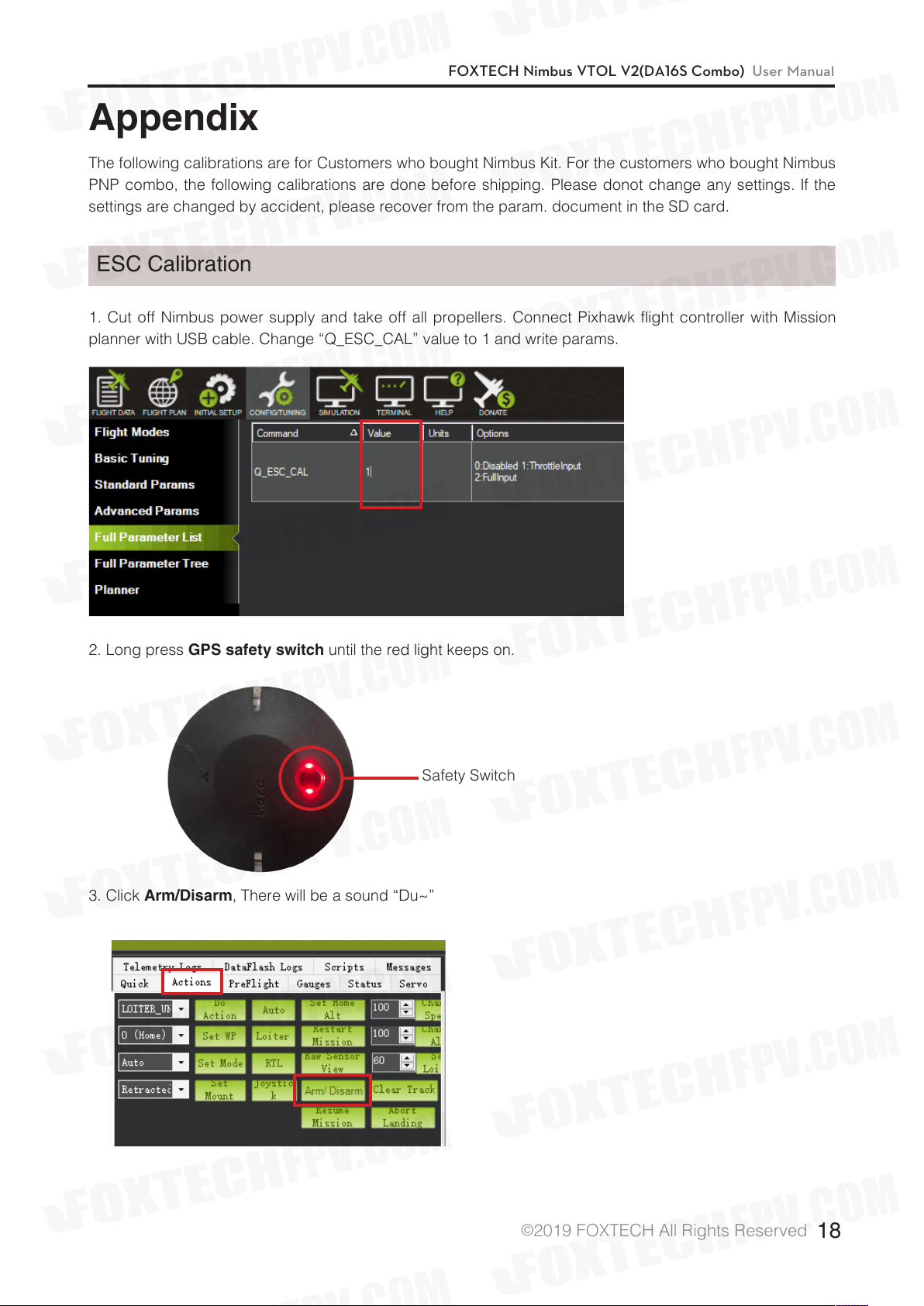
Appendix
The following calibrations are for Customers who bought Nimbus Kit. For the customers who bought Nimbus
PNP combo, the following calibrations are done before shipping. Please donot change any settings. If the
settings are changed by accident, please recover from the param. document in the SD card.
ESC Calibration
1. Cut off Nimbus power supply and take off all propellers. Connect Pixhawk flight controller with Mission
planner with USB cable. Change “Q_ESC_CAL” value to 1 and write params.
2. Long press
3. Click
Arm/Disarm
GPS safety switch
, There will be a sound “Du~”
until the red light keeps on.
Safety Switch
©
2019 FOXTECH All Rights Reserved
18
Page 20

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
4. In the following demonstration, Take Left hand throttle as an example. Push throttle to Max.(Pic 4-1),
connect Nimbus with power, when there is “di di ~ di” sound quickly push throttle to Min.(Pic 4-2) When
there is “di di di di ~di” sound, ESC calibration is successful. Then cut off power.
Pic 4-1
5. Connect Nimbus with power again. Long press GPS safety switch.Radio throttle push to Min, direction
stick push to right(Pic 5-1), disarm Nimbus, you can adjust “Q_M_SPIN_MIN”in mission planner. The default
value is 0.25. Write the value, it is complete.
Pic 5-1
Pic 4-2
©
2019 FOXTECH All Rights Reserved
19
Page 21

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Servo Checking and Required Mode Modification
Check the stick function of remote controller. (The follow example is demonstrated as transmitter Mode2
which means left hand is throttle.)
Please take off all propellers before the following calibrations in case any danger occurs.
Under Manual Mode:
1. Make sure the aircraft is in centre position.
2. Push the throttle-stick the motor speed will increase,and pull back the throttle-stick, the motor speed will
decrease.
3. Push the pitch-stick the two V-type tail will go down.
4. Pull back the pitch-stick the two V-type tail will go up.
5. Turn the aileron-stick to the left, the left aileron will go up, and the right one will go down.
6. Turn the aileron-stick to the right, the right aileron will go up, and the left one will go down.
©
2019 FOXTECH All Rights Reserved
20
Page 22

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
7. Turn the direction-stick to the left,the left V-type tail will go down, and the right tail will go up.
8. Turn the direction-stick to the right,the right V-type tail will go down, and the left tail will go up.
Under the Q_STABLIZE Mode
1.Unlock the plane under the Q_STABLIZE mode. (Click safety switch, set the throttle at minimum speed
and turn the direction stick to the far right.)
Safety Switch
2. Check the throttle stick: when you push the throttle-stick, the motors speed will increase, and pull back
the throttle-stick, the motors speed will decrease.
3. Push the pitch-stick, the speed of the front motor will decrease and the back motor will increase, the two
V-type tails will go down.
©
2019 FOXTECH All Rights Reserved
21
Page 23

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
4. Pull the pitch-stick, the speed of the front motor will increase and the back motor will decrease, the two
V-type tail will go up.
5. Turn the aileron-stick to the left, the left motor speed will decrease, and the right motor speed will increase
left aileron goes up, and the right aileron goes down at the same time).
6. Turn the aileron-stick to the right, the right motor speed will decrease, and the left motor speed will
increase left aileron goes down, and the right aileron goes up at the same time).
7. Turn the direction-stick to the left, and the left tilt servo will lean back, the right tilt servo will lean forward.
8. Turn the direction-stick to the right, and the left tilt servo will lean forward, the right tilt servo will lean back.
©
2019 FOXTECH All Rights Reserved
22
Page 24

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Angle Deviation Compensation Checking
Unlock the plane under the Q_STABLIZE mode:
1. Plane leans forward, the speed of the front motors will increase, the back motor-decrease,the two V-type
tails go up.
2. Plane leans back, the speed of front motors will decrease, the back motor-increase,the two V-type tails
go down.
3. Plane leans to the left, left aileron will go down, and the right aileron will go up, the speed of left motor
increases, and the right motor decreases.
4. Plane leans to the right,left aileron will go down, and the right aileron will go up, the speed of left motor
decreases, and the right motor increases.
©
2019 FOXTECH All Rights Reserved
23
Page 25
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
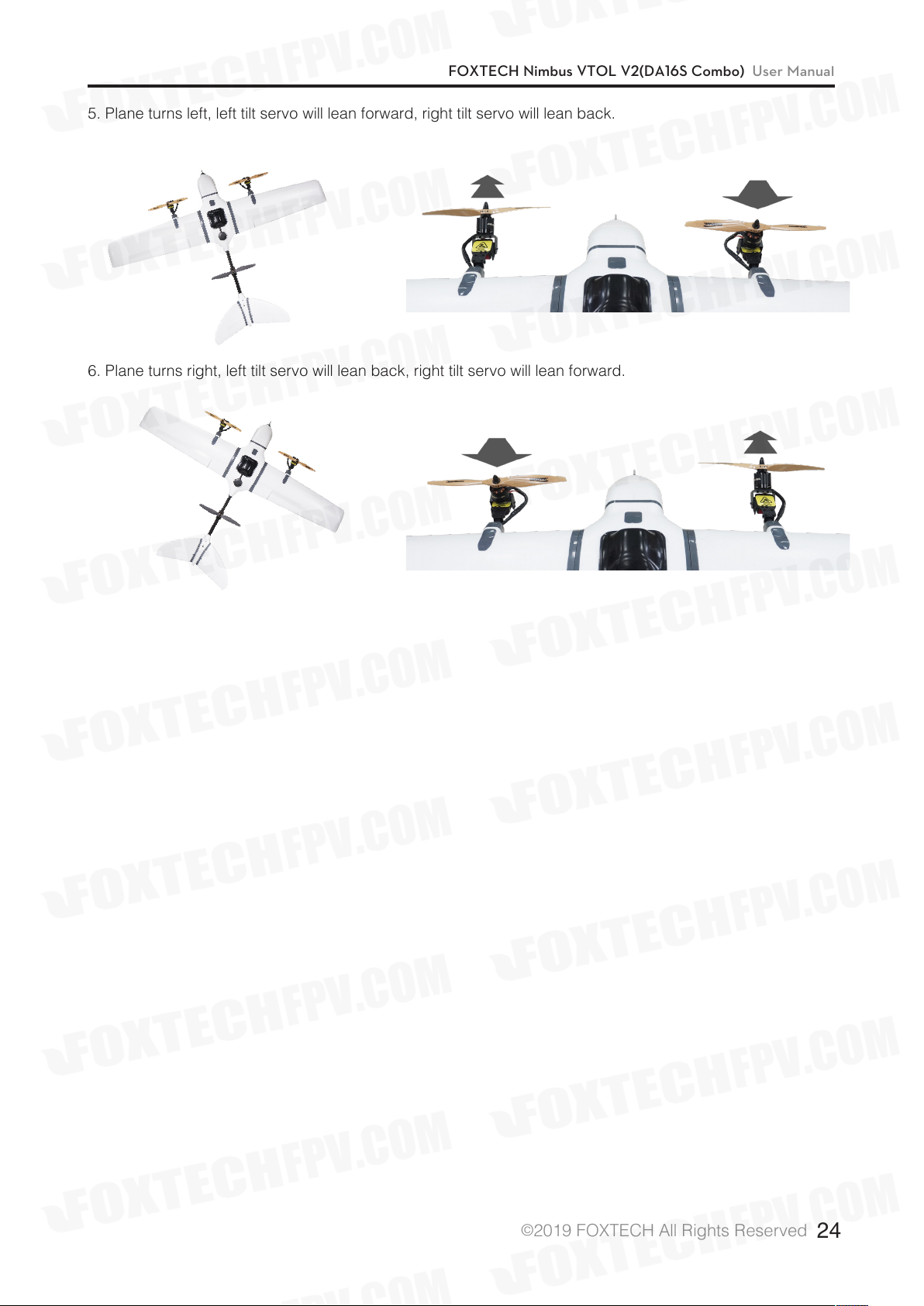
5. Plane turns left, left tilt servo will lean forward, right tilt servo will lean back.
6. Plane turns right, left tilt servo will lean back, right tilt servo will lean forward.
©
2019 FOXTECH All Rights Reserved
24
Page 26

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
Default Setttings
Some default setttings in Pixhawk for Nimbus Mapping VTOL PNP Combo for reference.
1. Nimbus Pixhawk Basic Settings for Reference
2. Suggested ”Q_VFWD” is: 0.025 , this setting will increase anti-wind performance in QLOITER mode and
Vtol-take off and landing.
3. Suggested “Q_WVANE_GAIN” value is: 0, if you want to plane to point to the wind in QLOITER Mode and
Vtol-take off and landing, change it to 1.
4. Suggested “Q_WVANE_MINROLL” value is: 3
5. Suggested “ALT_HOLD_RTL” value is: 5000, default home altitude, 50m is a good number for Vtol-
landing.
6. Suggested “Q_RTL_MODE” value is: 1, if you prefer the plane go circles around the Home point instead
of go into Vtol-landing during RTL ,change it to 0.
7. Suggested “BRD_SAFETYENABLE” value is: 1, always important to have the safety switch on after power
on,you will need to press the safety switch on the GPS for 2 second to active the plane to fly.
©
2019 FOXTECH All Rights Reserved
25
Page 27

8. Suggested “Q_WP_SPEED_DN” is: 250
Suggested “Q_WP_SPEED_UP” is: 150
9. Suggested “Q_LAND_FINAL_ALT” is: 8
Suggested “Q_LAND_SPEED” is: 50
10. Suggested “Q_TRAN_PIT_MAX” value is: 5
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
11. Suggested “WP_RADIUS” value is: 30
12. Since all control surfaces are pre-connected, so no need to change any setting in the radio calibration in
Mission Planner.
If you need faster yaw speed, you can try to change the value Q_TILT YAW ANGLE to higher value, default
value is from 10-15, and the max value is 30.
Warning: propellers would hit the wings if the input value is too high.
13. Transition servo speed can be adjusted by Q_tilt_rate_up and Q_tilt_rate_dn, it’s suggested to set the Q_
tilt up with at least 100degree/s speed so the plane can be saved in case there is any malfunction caused
by setting or plane mechanism.
©
2019 FOXTECH All Rights Reserved
26
Page 28

FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
!Firmware Update Notice
If you need to update your Pixhawk FC to the latest version, please follow the steps:
1. Install firmware.
2. Recover your Nimbus parameters to the FC (There is a param. document in the SD card).
3. Do not change any data in the flight controller. Please recover the parameter again if by any chance your
FC data is changed.
Update Notice(Sep 6th, 2018)
One pair of self-locking nuts for servos will be shipped with Nimbus. Because the bullet nuts may loose after
repeatly take off, install or long flight time.
©
2019 FOXTECH All Rights Reserved
27
Page 29

Pixhawk Connections
FOXTECH Nimbus VTOL V2(DA16S Combo) User Manual
This content is subject to change.
Download the latest version from
https://www.foxtechfpv.com/foxtech-nimbus-vtol-v2.html
For everyday updates, please follow
Foxtech Facebook page: https://www.facebook.com/foxtechhobby
YouTube Channel: https://www.youtube.com/user/foxtechonline/featured?view_as=subscriber
©
2019 FOXTECH All Rights Reserved
28
 Loading...
Loading...