

Page 1

Operating Instructions
EMGZ492.EIP
Dual-channel measuring amplifier for ETHERNET/IP
EMGZ492.R.EIP for mounting on DIN rail
EMGZ492.W.EIP for wall mounting
Document Version 1.0 09/2019 NS
Firmware Version V 2.0.0
EDS Datei FMS_TensionAmpilfier_EMGZ492_EIP_V1_1.eds
Diese Bedienungsanleitung ist auch in Deutsch erhältlich.
Bitte kontaktieren Sie Ihre lokale FMS Vertretung.
© by FMS Force Measuring Systems AG, CH-8154 Oberglatt – Alle Rechte vorbehalten.
Page 2

Operating Instructions EMGZ492.EIP
1 Table of Contents
1 TABLE OF CONTENTS ............................................................................................................................. 2
2 SAFETY INFORMATION ........................................................................................................................... 4
2.1 Presentation of Safety Information ..................................................................................................... 4
2.1.1 Danger that Could Result in Minor or Moderate Injuries ............................................................... 4
2.1.2 Note Regarding Proper Function ................................................................................................... 4
2.2 General Safety Information ................................................................................................................ 5
3 PRODUCT DESCRIPTION ........................................................................................................................ 6
3.1 Block Diagram .................................................................................................................................... 6
3.2 System Description ............................................................................................................................ 6
3.3 Scope of Delivery ............................................................................................................................... 6
4 QUICK GUIDE/QUICK START .................................................................................................................. 8
4.1 Preparations for Parameterization ..................................................................................................... 8
4.2 Mounting Sequence ........................................................................................................................... 8
4.3 Mounting and Electrical Connections ................................................................................................. 8
4.4 Force sensor Mounting ...................................................................................................................... 9
4.5 Electrical Connections ........................................................................................................................ 9
4.5.1 EMGZ492.R.EIP ............................................................................................................................ 9
4.5.2 EMGZ492.W.EIP ......................................................................................................................... 10
4.5.3 Ethernet Anschlüsse .................................................................................................................... 11
5 CALIBRATION OF THE MEASURING SYSTEM .................................................................................... 12
5.1 Offset Compensation ....................................................................................................................... 12
5.2 Calibration (Adjusting the Gain Factor) ............................................................................................ 12
5.3 Calibration ........................................................................................................................................ 13
5.4 Gain .................................................................................................................................................. 13
5.5 Limit Value Violations ....................................................................................................................... 14
5.5.1 Overload Test .............................................................................................................................. 14
5.5.2 Overflow and Underflow Test ...................................................................................................... 15
5.6 Description of the LEDs ................................................................................................................... 15
6 INTEGRATION INTO THE ETHERNET/IP NETWORK ........................................................................... 16
6.1 EtherNet/IP Interface ........................................................................................................................ 16
6.2 TCP/IP Configuration ....................................................................................................................... 16
6.3 Data Exchange ................................................................................................................................. 16
7 CONFIGURATION .................................................................................................................................... 17
7.1 Modify IP address with RLLinx ......................................................................................................... 17
7.2 Parameter Description ..................................................................................................................... 19
7.3 Cyclic Data Traffic ............................................................................................................................ 22
7.4 Acyclic Data Traffic .......................................................................................................................... 26
8 ETHERNET/IP COMMUNICATION .......................................................................................................... 33
8.1 General Function .............................................................................................................................. 33
8.2 Services and Protocols .................................................................................................................... 33
9 WEB INTERFACE .................................................................................................................................... 34
9.1 Amplifier Access via Web Interface ................................................................................................. 34
9.2 Parameter Settings .......................................................................................................................... 35
9.3 Offset Adjustment and Calibration via Web Browser ....................................................................... 35
9.4 Ethernet Settings .............................................................................................................................. 36
09.09.2019 2
Page 3

Operating Instructions EMGZ492.EIP
9.5 System Settings ............................................................................................................................... 36
10 DIMENSIONS ........................................................................................................................................... 37
11 TECHNICAL DATA .................................................................................................................................. 38
09.09.2019 3
Page 4
Operating Instructions EMGZ492.EIP
2 Safety Information
All safety information, operating and installation regulations listed here ensure proper
function of the device. Safe operation of the systems requires compliance at all times.
Noncompliance with the safety information or using the device outside of the specified
performance data can endanger the safety and health of persons.
Work with respect to operation, maintenance, retrofit, repair, or setting the device
described here must only be performed by expert personnel.
2.1 Presentation of Safety Information
2.1.1 Danger that Could Result in Minor or Moderate Injuries
Danger, warning, caution
Type of danger and its source
Possible consequences of nonobservance
Measure for danger prevention
2.1.2 Note Regarding Proper Function
Note
Note regarding proper operation
Simplification of operation
Ensuring function
09.09.2019
4
Page 5
Operating Instructions EMGZ492.EIP
2.2 General Safety Information
The function of the measuring amplifier is only ensured with the
components in the specified layout to one another. Otherwise, severe
malfunctions may occur. Thus, observe the mounting information on
the following pages.
Observe the local installation regulations.
Improper handling of the electronics module can lead to damage to
the sensitive electronics!
Do not work with a blunt tool (screw driver, pliers, etc.) on the
housing!
Use suitable grounding (grounding wrist strap, etc.) when working on
the electronics.
The devices should have a distance of at least 15 mm to one another
in the control cabinet for proper cooling.
09.09.2019 5
Page 6
Operating Instructions EMGZ492.EIP
3 Product Description
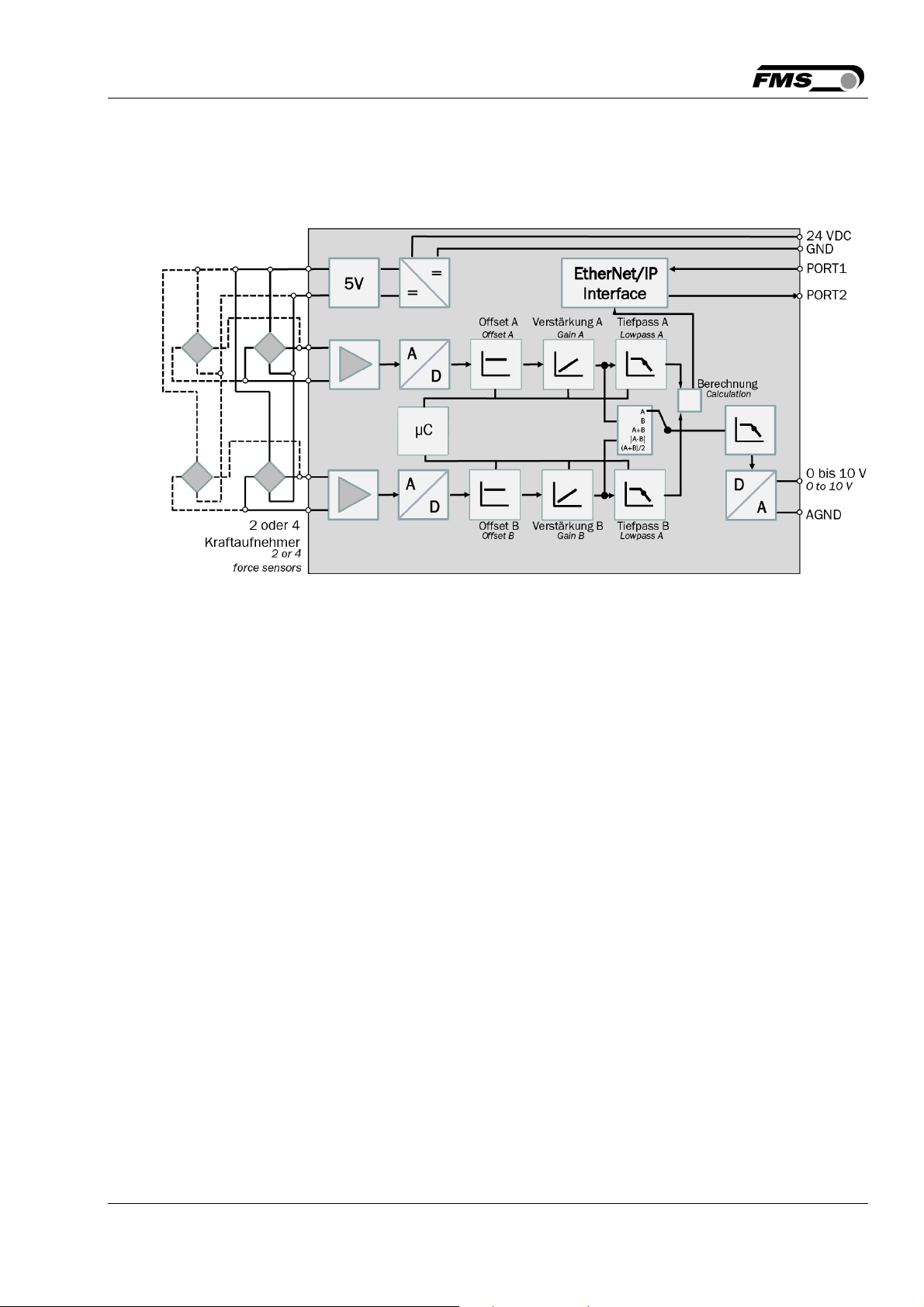
3.1 Block Diagram
Figure 1: block diagramEMGZ492.EIP EMGZ492_EIP_BA_Manual.ai
3.2 System Description
The microprocessor-controlled measuring amplifier EMGZ492.EIP series is used in
processing, amplifying, and relaying sensor signals in suitable form to downstream
devices. The measured force values are available via ETHERNET/IP and an analog
voltage output.
The measuring amplifiers are suitable for tension measurements using all FMS force
sensors. Two force sensors A and B can be connected to the device. Both measuring
values are available as individual signal (A and B), as sum signal (A + B), as differential
signal |A – B| or as average value (A + B)/2 for the master controller.
Furthermore, device information, parameters, and system settings can be accessed via
a web browser. Offset compensation and system calibration can also be performed via
the web browser.
3.3 Scope of Delivery
The following is included in the scope of delivery
- Measuring amplifier
- Mounting and operating instructions
The following is not included in the scope of delivery
- AC/DC power supply, minimum requirement: EMC immunity specifications
EN61000-4-2, 3, 4, 5; EN55024 light industry level, criteria A, e.g., TRAKO TXL 0350524D
- Cable for power supply
09.09.2019 6
Page 7

Operating Instructions EMGZ492.EIP
The following is not included in the scope of delivery, but are available as accessories
from FMS
- Patch cable with RJ45 plug (straight or 90°)
- Sensor cable for the connection of force sensor and measuring amplifier
- M12 plug, D-coded
09.09.2019 7
Page 8
Operating Instructions EMGZ492.EIP
4 Quick Guide/Quick Start
In these operating instructions, commissioning of the EMGZ492.EIP amplifier is limited
to the installation procedure, offset compensation, and system calibration.
4.1 Preparations for Parameterization
- Read the operating instructions of the selected force sensor carefully.
- Check your requirements on the system, such as:
o Used units in the system
o Used outputs (0 to 10V and bus)
- Filter settings for actual force value and analog output
- Create the connection diagram for your specific system layout (see chapter
“Electrical Connection”)
4.2 Mounting Sequence
- Mount the force sensors (mounting details can be obtained from the mounting
instructions of the force sensors)
- Connect the force sensors to the amplifier (see 4.5)
- Connect the amplifier to the supply voltage. The voltage supply must be in the range
of 18 to 36 VDC. (See 4.5)
- Perform offset compensation and calibration (see 5 and Fehler! Verweisquelle
konnte nicht gefunden werden.)
- Change the parameter settings as needed (see 9.2)
- Amplifier integration into the ETHERNET/IP network (see 9.5)
4.3 Mounting and Electrical Connections
Warning
To improve natural convection and keep heating of the amplifiers as
low as possible, the devices installed in a cabinet should have a
minimum distance of 15 mm.
Warning
The function of the measuring amplifier is only ensured with the
components in the specified layout to one another. Otherwise,
severe malfunctions may occur. Thus, the mounting information on
the following pages must be followed
Warning
The local installation regulations ensure the safety of electrical
systems. They are not considered in these operating instructions.
09.09.2019
8
Page 9
Operating Instructions EMGZ492.EIP
However, they must be met.
4.4 Force sensor Mounting
The force sensors are mounted in line with the mounting instructions of the respective
products. The mounting instructions are included with the force sensors.
4.5 Electrical Connections
Two or four force sensors can be connected to the EMGZ492.EIP. When four sensors are
used, two of them have to be connected in parallel. The force sensors and amplifier are
connected using a 2x2x0.25 mm2 [AWG 23] shielded, twisted cable.
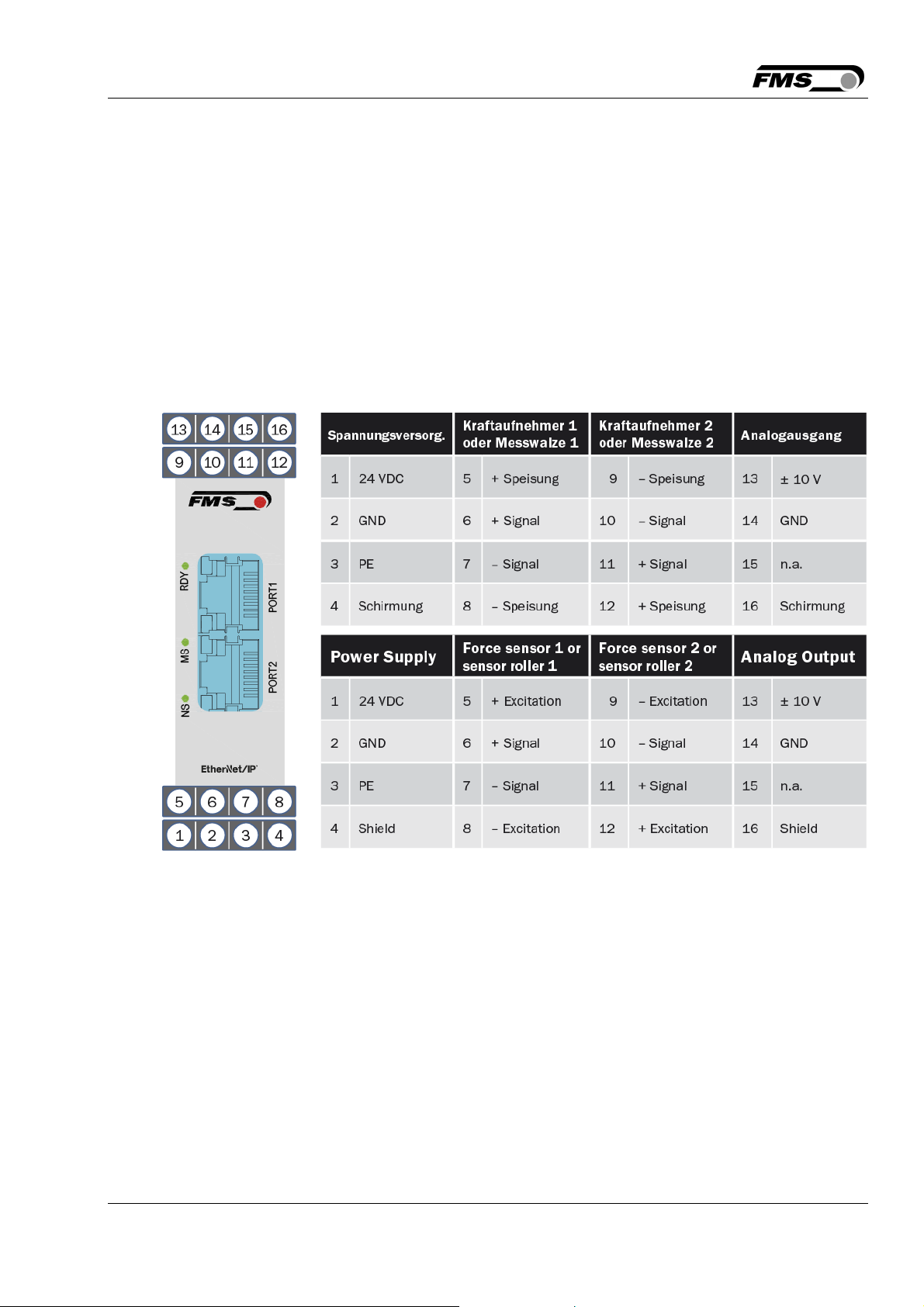
4.5.1 EMGZ492.R.EIP
Figure 2: EMGZ492.R.EIP electrical connections EMGZ492_EIP_BA_Manual.ai
Color specifications (per IEC60757) and coding apply to FMS components only!
For easier installation, the terminal blocks can be detached from the main housing.
09.09.2019 9
Page 10
Operating Instructions EMGZ492.EIP
Figure 3: Detachable terminal blocks: use a small slotted screwdriver as a lever
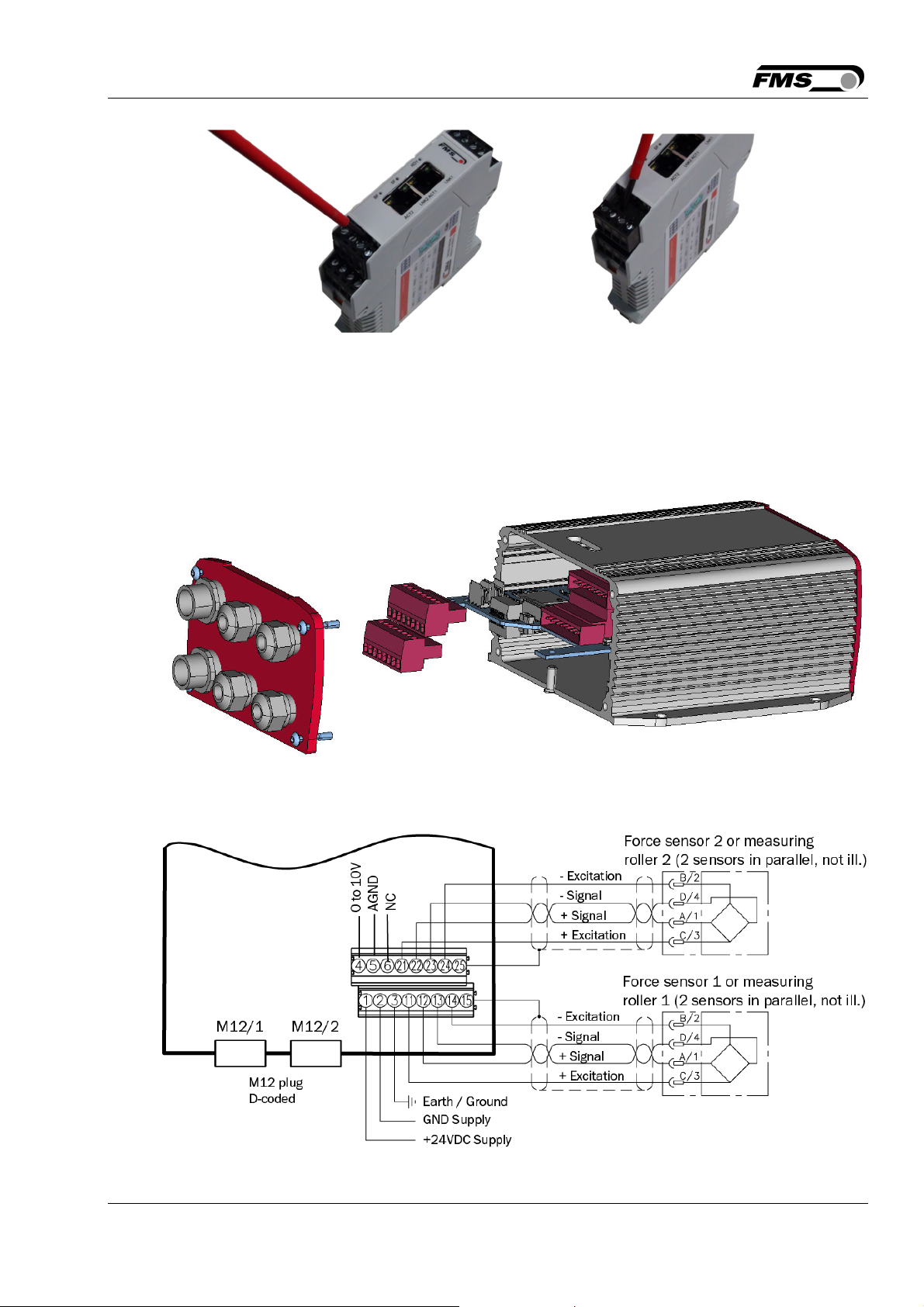
4.5.2 EMGZ492.W.EIP
The 4 screws of the cover with the PG glands and the M12 plug must be loosened for
board access. You can slide out the board by approx. 2 cm (1 in.) and loosen the
terminal blocks for easier connection of the wires.
Figure 4: Pc board with removable terminal blocks EMGZ491_W_EIP_16-11.30.FCStd
Figure 5: EMGZ492.W.EIP electrical connections EMGZ492_EIP_BA_Manual.ai
09.09.2019
10
Page 11
Operating Instructions EMGZ492.EIP
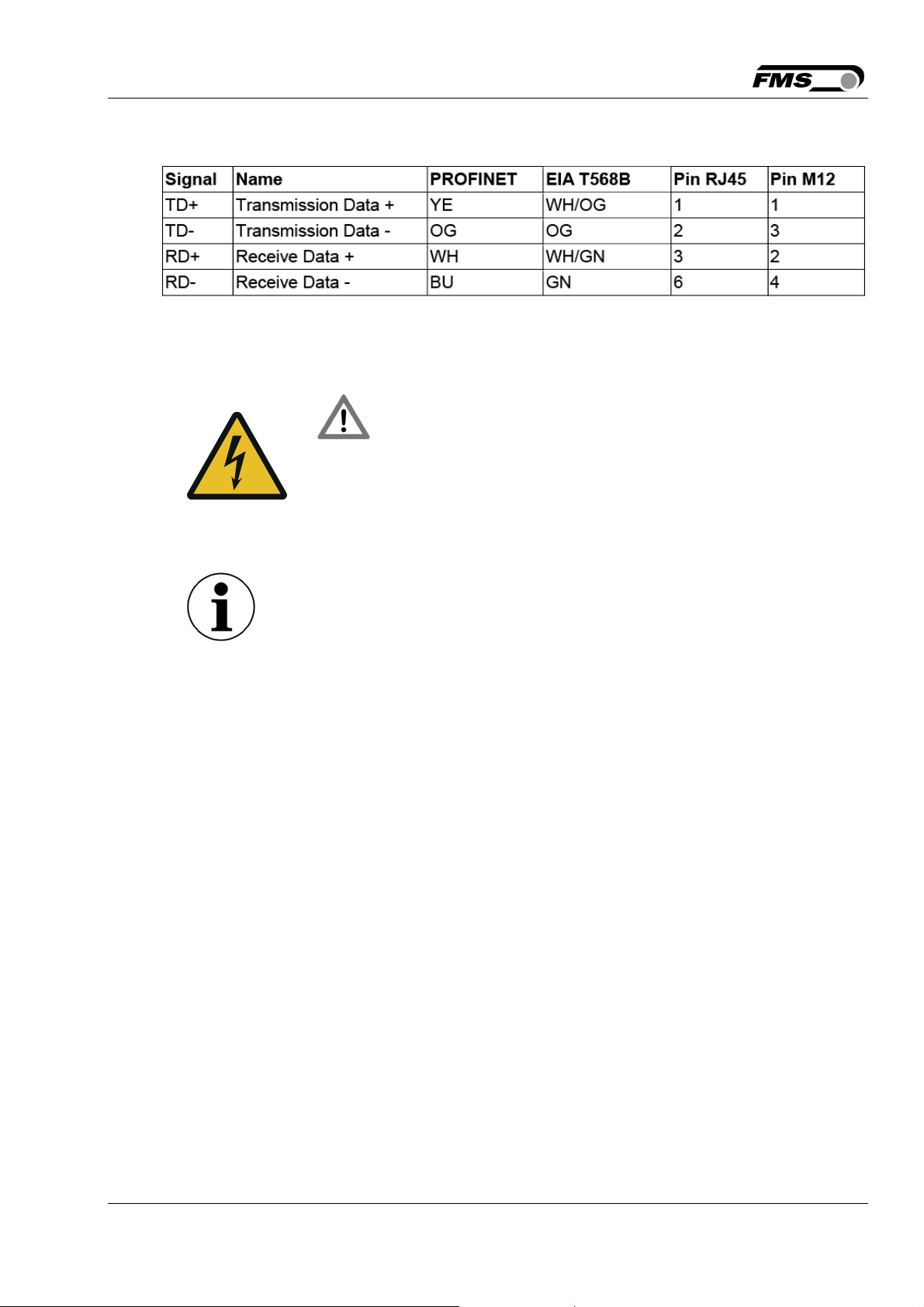
4.5.3 Ethernet Anschlüsse
Tabelle 1: Pin Belegung Ethernet Anschluss EMGZ492_EIP_BA_Manual.ai
Poor grounding can result in electric shocks for persons,
malfunctions of the overall system or damage to the measuring
amplifier! Proper grounding must always be ensured.
Warning
Note
Cable shielding may only be connected to one side of the measuring
amplifier. On the side of the force sensor, shielding must remain
open.
09.09.2019
11
Page 12
Operating Instructions EMGZ492.EIP
5 Calibration of the Measuring System
There are two options for performing the calibration:
- Via the web browser (see 9)
- Directly in PLC
5.1 Offset Compensation
Using offset calibration, the weight of the measuring roller and the roller bearings is
compensated and the measuring system “zeroed”.
Offset compensation must always be executed prior to the actual calibration. The
measuring roller must not be loaded during the procedure.
5.2 Calibration (Adjusting the Gain Factor)
Calibration is used for matching the gain factor with the force sensors. After calibration,
the displayed force corresponds to the force effectively affecting the material. Two
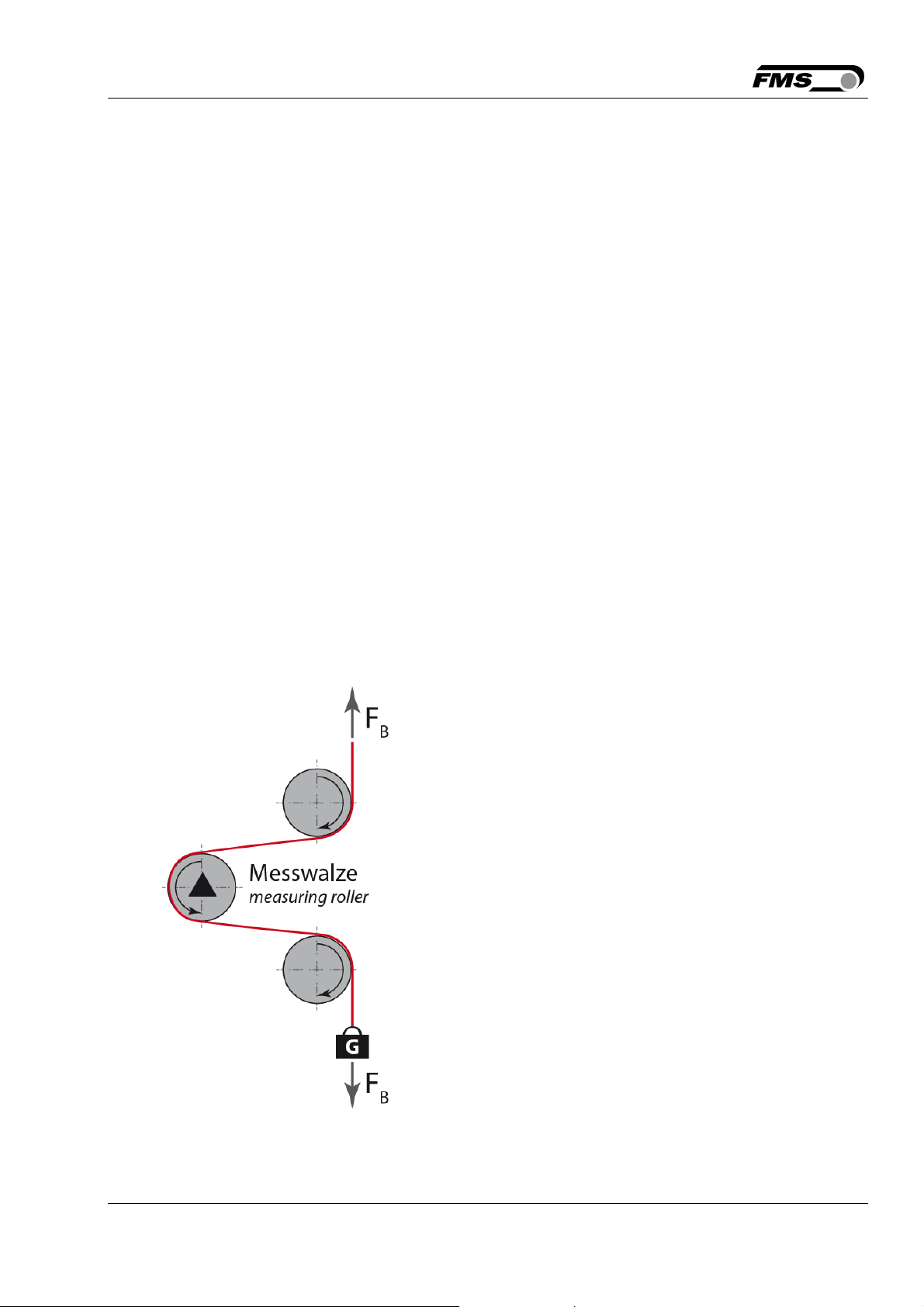
calibration methods are available. The first calibration method described here uses a
defined weight. There is also a calculation method for the gain. The weight-based
calibration method is simple and delivers more accurate results as it replicates the
material profile (see the figure below) and considers the actual circumstances in the
machine.
If the material tension in the machine cannot be replicated using the weight method
(e.g., for space reasons), the gain can be calculated using the “FMS-Calculator”. This tool
can be downloaded from the FMS homepage.
Figure 6: Replication of the material profile using a defined weight
Tension_Control_Solutions.ai
09.09.2019 12
Page 13

Operating Instructions EMGZ492.EIP
5.3 Calibration
- Activate the web interface (see 9) and click on “Offset/Calibration” from the menu
(see 9.3).
- Connect the first force sensor (see 4.5).
- The measuring signal must become positive for loads in measuring direction. If it is
negative, the signal lines of the affected force sensors must be switches at the
terminal block (see 4.5).
- Connect the second force sensor.
- The measuring signal must become positive for loads in measuring direction. If it is
negative, the signal lines of the affected force sensors must be switched at the
terminal block (see 4.5).
- Click on “Adjust Offset” in the web browser.
- Insert material or rope into the machine.
- Load material or rope with a defined weight (see 5.1).
- Click on “Calibrate Gain” in the web browser.
5.4 Gain
Depending on the material wound around the measuring roller, the applied force is not
relayed to the sensors 1:1. Thus, the measured force does not correspond to the
effectively applied force. To correct for this error, the measured force is amplified using
a factor. The factor that is referred to as gain or gain factor is calculated such that the
resulting force corresponds to the applied force. The gain is calculated per the following
formula:
F
Digit * F
Nom
act
N
Gain =
F
Nom
N * F
Digit
act
Explanations
Variable Description
F
Digit Is the nominal force as binary value after the A/D converter. This
Nom
value is a constant with value 11’890. From the user’s point of view,
this value corresponds to an input signal of 9 mV.
The amplifier can measure up to an overload of 37 %.
F
N Effectively applied force at the measuring system in Newtons.
act
F
F
Nom
Digit
act
N
Is the nominal force of the measuring system in Newtons.
Measured force at the measuring system as binary value after the
A/D converter. From the user’s point of view, this value corresponds
to a voltage in mV, which is relayed by the measuring system to the
amplifier.
09.09.2019 13
Page 14

Operating Instructions EMGZ492.EIP
Example
- Nominal force at 9 mV = 11‘890 digit
- 1 force sensors with 500 N nominal force, as per type plate; F
- Use of a defined weight of 50 kg (corresponds to approx. 500 N); F
- Obtain measured force with suspended weight from the PLC, e.g., F
11‘890 * 500N
Gain = = 2.388
500N * 4980
Note
The gain factor needs to be calculated for both of the channels
individually.
Note
N = 500 N
sys
N = 500 N
act
Digit = 4‘980
act
This calculation is not required when calibrating via web browser.
This calculation type is also used by the FMS Calculator. It is thus possible to directly
copy the gain calculated in FMS Calculator in the gain parameter. Thus, calibration at
the system is not required. However, calibration at the system is preferred over
calibration using FMS Calculator, as it delivers more accurate gain results.
5.5 Limit Value Violations
The amplifier checks the analog input and output for limit value violations. At the input,
it is checked using the input voltage, whether the force sensor is mechanically
overloaded (overload test). The measuring amplifier can measure an overload of 37 %.
At the output, it is checked, whether the output voltage depending on the amplified
input signal will be above or below the physically possible value. In this case, an
overflow and/or underflow is present.
5.5.1 Overload Test
The overload test is performed using the raw value read on the ADC. It is thus not
related to any force and can be applied independently from the nominal force to every
force sensor.
Test rule:
The FMS force sensors deliver 9 mV at the output under nominal force load. In the case
of a load up to the mechanical stop, approx. 12.4 mV are output. These values apply, if
the force sensor is loaded in normal operating direction (red point). In reverse direction,
the values are respectively negative. The amplifier checks overload in both directions.
The limit value for overload is fixed set to 12 mV and/or -12 mV. If one of these limit
values is reached, the overload status bit of the respective force sensors is set. The bit is
09.09.2019
14
Page 15

Operating Instructions EMGZ492.EIP
removed again, as soon as the raw value is 0.5 mV below and/or above the triggering
limit value.
5.5.2 Overflow and Underflow Test
The overflow and underflow test is performed with the output value that is relayed to the
DAC, calculated from the gain. If the output value exceeds the maximum possible value,
an overflow is present. If it undercuts the minimum possible value, an underflow is
present.
Test rule
The output voltage is between 0 and +10 V. A hysteresis of +/-10 digits is used for the
test so that the error bits do not trigger for every small over- and/or underflow. Thus, the
overflow triggers, when the theoretically calculated output value of 10.05 V is reached.
For underflow, the value is 0.05 V. When these limit values are reached, the respective
bits are set in the status. The bits are removed, as soon as the output value is within the
valid range again (above 0.05 V and below 9,95 V).
5.6 Description of the LEDs
.R-Version .W-Version
LED Description
PORT1
PORT2
Port 1 Ethernet cable 1 connected and
linked with counter point
Port 2 Ethernet cable 1 connected and
linked with counter point
Green, on: in operation, ok
Green, flashing: standby
MS
Green, red flashing: self-test
Red, flashing: simple error
Red, on: severe error
Green, on: connected
Green, flashing: not connected
NS
Green, red flashing: time-out
connection
Red, on: dual IP
Illuminates in green as soon as the
RDY
voltage supply is connected and the
processor is started.
Figure 7: Signal LEDs on EMGZ492.EIP EMGZ491_EIP_Grafik.ai
09.09.2019 15
Page 16

Operating Instructions EMGZ492.EIP
6 Integration into the EtherNet/IP Network
The measuring amplifiers of the EMGZ492.EIP series can operate in an EtherNet/IP
network. Here, the amplifier operates as EtherNet/IP-adapter with the PLC which has
the role of a EtherNet/IP-scanner.
6.1 EtherNet/IP Interface
EtherNet/IP is supported. The respective communication profile is selected by the
controller (master) via the EDS file. The EMGZ492.EIP transfers the actual value in digit
and the status/error byte. In addition, parameters, such as offset actual value, gain
actual value, filter actual value, filter analog output, as well as scaling analog output can
be adjusted.
6.2 TCP/IP Configuration
The Ethernet settings must be known for PLC or web browser to communicate with the
amplifier in an EtherNet/IP network. The system developer configures the address for
every device and has thus a general overview of the address allocation in the network.
The IP address of the amplifier is factory pre-set to 192.168.0.90.
6.3 Data Exchange
The EMGZ492.EIP uses the communication types typical for EtherNet/IP. Cyclic data
traffic is used for the fast transmission of measured data. Acyclic data traffic is used for
parameterization. Cyclic data traffic is used for transmitting the limit value violations.
09.09.2019 16
Page 17

Operating Instructions EMGZ492.EIP
7 Configuration
The EMGZ492.EIP can be configured either via the web interface or via ETHERNET/IP.
The parameters “Low-pass filter active” and “Low-pass filter analog output active”
cannot be accessed via the web interface.
7.1 Modify IP address with RLLinx
09.09.2019
17
Page 18

Operating Instructions EMGZ492.EIP
09.09.2019
18
Page 19

Operating Instructions EMGZ492.EIP
7.2 Parameter Description
Access data with RSLogix 5000
Parameter
Name Description
Unit Here you select which unit of measurement is used. The
label located on the sensor will indicate the nominal
force in Newtons.
Note:
This input will also affect the unit of the cyclic process
data.
If lb (pound) is selected, the system switches from metric
to imperial measuring units.
Selection N, kN, lb, g, kg
Specified value N
09.09.2019
19
Page 20

Operating Instructions EMGZ492.EIP
-
-
Low-pass filter active A Here, the status of the low-pass filter active value for the
Offset A The values determined with the “Offset Compensation”
force sensor A is indicated.
This parameter cannot be accessed via the web interface.
Min. 0
Max. 1
Specified value 1
0 = no, inactive, 1 = yes, active
procedure are stored in the form of a digital value in the
[Offset] parameter. The value is used for compensating
for the roller weight of force sensor A.
Min. -16’000
Max. 16’000
Specified value 0
Gain A The gain factor ensures that the displayed force matches
the effective force on sensor A.
Min. 0.100
Max. 20.000
Specified value 1.000
Nominal force A The nominal force indicates the measuring capacity of
force sensor A. E.g., if a 500 N force sensors is installed
500 N must be entered.
Unit N
Min. 1.00
Max. 200‘000.00
Specified value 1‘000.00
Limit frequency low
pass filter actual value
A
The amplifier features a low
pass filter that filters the
measured value is relayed via ETHERNET/IP. This filter is
used for suppressing undesired interference signals that
are superimposed on the measuring signal. Using this
parameter, the limit frequency of the filter of force sensor
A is adjusted. The lower the limit frequency, the slower
the measuring value.
This low-pass filter is independent from the output filter.
Unit Hz
Min. 0.1
Max. 200.0
Specified value 10.0
09.09.2019 20
Page 21

Operating Instructions EMGZ492.EIP
-
-
Low-pass filter active B Here, the status of the low-pass filter active value for the
Offset B The values determined with the “Offset Compensation”
force sensor B is indicated.
This parameter cannot be accessed via the web interface.
Min. 0
Max. 1
Specified value 1
0 = no, inactive, 1 = yes, active
procedure are stored in the form of a digital value in the
[Offset] parameter. The value is used for compensating
for the roller weight of force sensor B.
Min. -16’000
Max. 16’000
Specified value 0
Gain B The gain factor ensures that the displayed force matches
the effective force on sensor B.
Min. 0.100
Max. 20.000
Specified value 1.000
Nominal force B The nominal force indicates the measuring capacity of
force sensor B. E.g., if a 500 N force sensors is installed
500 N must be entered.
Unit N
Min. 1.00
Max. 200‘000.00
Specified value 1‘000.00
Limit frequency low
pass filter actual value
B
The amplifier features a low
pass filter that filters the
measured value is relayed via ETHERNET/IP. This filter is
used for suppressing undesired interference signals that
are superimposed on the measuring signal. Using this
parameter, the limit frequency of the filter of force sensor
B is adjusted. The lower the limit frequency, the slower
the measuring value.
This low-pass filter is independent from the output filter.
Unit Hz
Min. 0.1
Max. 200.0
Specified value 10.0
09.09.2019 21
Page 22

Operating Instructions EMGZ492.EIP
-
Low-pass filter analog
output active
Limit frequency low
pass filter analog
output
Here, the status of the low-pass filter for the analog
output is indicated.
This parameter cannot be accessed via the web interface.
Min. 0
Max. 1
Specified value 1
0 = no, inactive, 1 = yes, active
The amplifier features a low-pass filter that filters the
signal of the analog voltage output. This filter is used for
suppressing undesired interference signals. Using this
parameter, the limit frequency of the filter is adjusted.
This low-pass filter is independent from the ETHERNET/IP
filter.
Unit Hz
Min. 0.1
Max. 200.0
Specified value 10.0
Analog output scaling This parameter determines, for which force the analog
7.3 Cyclic Data Traffic
After a successful system start, controller and the assigned devices can exchange cyclic
process data. The table below shows the measured data and how they are transmitted.
output outputs its maximum voltage (10 V).
Note:
If lb (pound) is selected, the system switches from metric
to imperial measuring units.
Unit N
Min. 0.1
Max. 200‘000.00
Specified value 1‘000.00
09.09.2019 22
Page 23

Operating Instructions EMGZ492.EIP
Parameter
Name Description
Actual value A in ADC Value read in via the A/D converter.
Data type int (signed 16 bit)
Value range -16384 bis 16383
Value format ±#####
The value is interpreted as integer without decimal place.
E.g. 1000 = 1000 ADC raw value
Actual value A in
Newton
Filtered actual value converted into Newton
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±######.###
The value is interpreted as decimal number with 3
decimal places. E.g. 1500 = 1.500N (1.5N)
Unit N
Actual value A in
pound
Filtered actual value converted into pound.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±######.###
The value is interpreted as decimal number with 3
decimal places. E.g. 224820 = 224.820lb (224.82lb)
Unit lb
Actual value A in unit Filtered actual value converted into configured unit.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±#######.### for N, kN, kg, or lb
The value is interpreted as decimal number with 3
decimal places. E.g. unit set to kN 100000 = 100.000kN
(100kN)
Value format ±#########.# for g
The value is interpreted as decimal number with 1
decimal place. E.g. unit set to g 12340 = 1234.0g
(1234g)
Unit N, kN, g, kg, or lb
09.09.2019 23
Page 24

Operating Instructions EMGZ492.EIP
Actual value B in ADC Value read in via the A/D converter.
Data type int (signed 16 bit)
Value range -16384 bis 16383
Value format ±#####
The value is interpreted as integer without decimal place.
E.g. 1000 = 1000 ADC raw value
Actual value B in
Newton
Filtered actual value converted into Newton
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±######.###
The value is interpreted as decimal number with 3
decimal places. E.g. 1500 = 1.500N (1.5N)
Unit N
Actual value B in
pound
Filtered actual value converted into pound.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±######.###
The value is interpreted as decimal number with 3
decimal places. E.g. 224820 = 224.820lb (224.82lb)
Unit lb
Actual value B in unit Filtered actual value converted into configured unit.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±#######.### for N, kN, kg, or lb
The value is interpreted as decimal number with 3
decimal places. E.g. unit set to kN 100000 = 100.000kN
(100kN)
Value format ±#########.# for g
The value is interpreted as decimal number with 1
decimal place. E.g. unit set to g 12340 = 1234.0g
(1234g)
Unit N, kN, g, kg, or lb
09.09.2019 24
Page 25

Operating Instructions EMGZ492.EIP
Actual value A + B in
unit
Actual value |A - B| in
unit
Filtered actual values sum signal converted into
configured unit.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±#######.### for N, kN, kg, or lb
The value is interpreted as decimal number with 3
decimal places. E.g. unit set to kN 100000 = 100.000kN
(100kN)
Value format ±#########.# for g
The value is interpreted as decimal number with 1
decimal place. E.g. unit set to g 12340 = 1234.0g
(1234g)
Unit N, kN, g, kg, or lb
Filtered actual values differential signal converted into
configured unit.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Actual value (A + B)/2
in unit
Value format ±#######.### for N, kN, kg, or lb
The value is interpreted as decimal number with 3
decimal places. E.g. unit set to kN 100000 = 100.000kN
(100kN)
Value format ±#########.# for g
The value is interpreted as decimal number with 1
decimal place. E.g. unit set to g 12340 = 1234.0g
(1234g)
Unit N, kN, g, kg, or lb
Filtered actual values medium signal converted into
configured unit.
Data type long (signed 32 bit)
Value range ±200‘000‘000
Value format ±#######.### for N, kN, kg, or lb
The value is interpreted as decimal number with 3
decimal places. E.g. unit set to kN 100000 = 100.000kN
(100kN)
Value format ±#########.# for g
The value is interpreted as decimal number with 1
decimal place. E.g. unit set to g 12340 = 1234.0g
(1234g)
Unit N, kN, g, kg, or lb
09.09.2019 25
Page 26

Operating Instructions EMGZ492.EIP
Status The status contains information about the current
7.4 Acyclic Data Traffic
After a successful system start, controller and the assigned devices can exchange
acyclic requirement data. The following table shows the parameters and commands ad
how they are transmitted using acyclic data traffic.
process and operating condition.
Every bit represents a separate event. The condition is
active, if the bit is set.
Data type byte (unsigned 8 bit)
Bit 0 Overload (LSB) A
Bit 1 Overload (LSB) B
Bit 2 Analog output overflow
Bit 3 Analog output underflow
09.09.2019 26
Page 27

Operating Instructions EMGZ492.EIP
Parameter
ID Description
10241 Unit
Access type R/W
Parameter command unit
Data type byte (unsigned 8 bit)
Value range 0 to 4
0=N; 1=kN; 2=lb; 3=g; 4=kg
Value format #
10242
Offset A
Access type R/W
Parameter command offset
Data type int (unsigned 16 bit)
Value range -16‘000 to 16‘000
Value format ±#####
10243
Gain A
Access type R/W
Parameter command gain
Data type int (unsigned 16 bit)
Value range 100 to 20‘000
Value format ##.###
10244 System force A
The system force is the maximum permissible force of
the used measuring system.
Access type R/W
Parameter command Nominal force
Data type long (unsigned 32 bit)
Value range 100 to 200‘000‘000
Value format ######.###
Unit N, regardless of configured unit
09.09.2019 27
Page 28

Operating Instructions EMGZ492.EIP
10245
10246
Low-pass filter active A
Switch the low-pass filter actual value on or off; 0 = off; 1
= on.
Not remanent: The adjusted value is lost on a restart! This
filter is switched on after a restart.
This parameter cannot be accessed via the web interface.
Access type R/W
Parameter command low-pass filter actual value
active (ETHERNET/IP)
Data type byte (unsigned 8 bit)
Value range 0 to 1
Value format #
Limit frequency low-pass filter actual value A
Limit frequency of the low-pass filter for the actual value
outputted via ETHERNET/IP.
Access type R/W
10247
Parameter command limit frequency low-pass filter
actual value (ETHERNET/IP)
Data type int (unsigned 16 bit)
Value range 1 to 2‘000
Value format ###.#
Unit Hz
Offset adjustment A
Determine and store offset. The system is set to zero
without material tension.
Access type R/W
Parameter command offset adjustment
Data type byte (unsigned 8 bit)
Value range 0 to 1
Value format #
09.09.2019 28
Page 29

Operating Instructions EMGZ492.EIP
10248 Calibration A
Calibrates the amplifier to the weight in Newton, which is
handed over here. It must match the suspended weight.
Access type R/W
Parameter command calibration
Data type long (signed 32 bit)
Value range 0 to 200‘000‘000
Value format ######.###
Unit N, regardless of configured unit
10249
Offset B
Access type R/W
Parameter command offset
Data type int (unsigned 16 bit)
Value range -16‘000 to 16‘000
Value format ±#####
10250
Gain B
Access type R/W
Parameter command gain
Data type int (unsigned 16 bit)
Value range 100 to 20‘000
Value format ##.###
10251 System force B
The system force is the maximum permissible force of
the used measuring system.
Access type R/W
Parameter command Nominal force
Data type long (unsigned 32 bit)
Value range 100 to 200‘000‘000
Value format ######.###
Unit N, regardless of configured unit
09.09.2019 29
Page 30

Operating Instructions EMGZ492.EIP
10252
10253
Low-pass filter active B
Switch the low-pass filter actual value on or off; 0 = off; 1
= on.
Not remanent: The adjusted value is lost on a restart! This
filter is switched on after a restart.
This parameter cannot be accessed via the web interface.
Access type R/W
Parameter command low-pass filter actual value
active (ETHERNET/IP)
Data type byte (unsigned 8 bit)
Value range 0 to 1
Value format #
Limit frequency low-pass filter actual value B
Limit frequency of the low-pass filter for the actual value
outputted via ETHERNET/IP.
Access type R/W
10254
Parameter command limit frequency low-pass filter
actual value (ETHERNET/IP)
Data type int (unsigned 16 bit)
Value range 1 to 2‘000
Value format ###.#
Unit Hz
Offset adjustment B
Determine and store offset. The system is set to zero
without material tension.
Access type R/W
Parameter command offset adjustment
Data type byte (unsigned 8 bit)
Value range 0 to 1
Value format #
09.09.2019 30
Page 31

Operating Instructions EMGZ492.EIP
10255 Calibration B
Explanation of access types: R = Read, W = Write, R/W = Read and Write.
Calibrates the amplifier to the weight in Newton, which is
handed over here. It must match the suspended weight.
Access type R/W
Parameter command calibration
Data type long (signed 32 bit)
Value range ± 200‘000‘000
Value format ######.###
Unit N, regardless of configured unit
10273 Output value
0 = (A +B)/2
1 = A + B
2 = |A - B|
3 = A
4 = B
10274 Analog output scaling
Determines, at which force the analog output outputs the
maximum value of 10 V.
Access type R/W
Parameter command analog output scaling
Data type long (unsigned 32 bit)
Value range 100 to 200‘000‘000
Value format ######.###
Unit N
09.09.2019 31
Page 32

Operating Instructions EMGZ492.EIP
10275 Low-pass filter analog output active
10276 Limit frequency low-pass filter analog output
Switch the low-pass filter analog output on or off; 0 = off;
1 = on.
Not remanent: The adjusted value is lost on a restart! This
filter is switched on after a restart.
This parameter cannot be accessed via the web interface.
Access type R/W
Parameter command low-pass filter analog output
active
Data type byte (unsigned 8 bit)
Value range 0 to 1
Value format #
Limit frequency of the low-pass filter for the actual value
outputted via the analog output.
Access type R/W
Parameter command limit frequency low-pass filter
analog output
Data type int (unsigned 16 bit)
Value range 1 to 2‘000
Value format ###.#
Unit Hz
Explanation of access types: R = Read, W = Write, R/W = Read and Write.
09.09.2019 32
Page 33

Operating Instructions EMGZ492.EIP
8 EtherNet/IP Communication
Using acyclic data exchange, IO devices (slaves) can be parameterized, configured, or
status information read out. For this purpose, read/write frames via IT standard services
using UDP/IP are used.
8.1 General Function
The read/write commands can be triggered, when the controller is connected to the IO
device, hence a “Connect” took place.
Figure 1: Read/Write cycle
A computer with the respective application can now request a “read” or “write” on the
data model of the controller. The controller executes the read/write command via
ETHERNET/IP and returns status and data to the computer.
8.2 Services and Protocols
The following services and protocols are used:
• Get_Attribute_Single
• Set_Attribute_Single
• gemäss CIP Spezifikation Volume 1 und Volume 2
All other services required for ETHERNET/IP are permissible as well.
The services above can be used with the EMGZ492.EIP at any time.
09.09.2019 33
Page 34

Operating Instructions EMGZ492.EIP
9 Web Interface
9.1 Amplifier Access via Web Interface
Parameter changes or system calibration are possible via a web interface. The use of the
web interface requires the knowledge of the IP address. Your IP system administrator can
provide the assigned address. After the IP address is entered into the web browser, the
homepage appears.
Figure 8: Homepage with device information
The homepage provides information about general device properties, such as serial
number and software version.
The menu on the left side of the screen allows navigation on the page.
Figure 9: Current Reading (current measured values)
The Current Reading page displays all current values of the amplifier. The first line
Tension shows the tensile force measured at the input in the adjusted unit.
In the second line Output, the output voltage is displayed in Volts.
09.09.2019
34
Page 35

Operating Instructions EMGZ492.EIP
9.2 Parameter Settings
The Parameters page offers the option to configure the amplifier via the web interface.
In the ETHERNET/IP environment, this is usually done from the PLC.
Figure 10: Parameter list
9.3 Offset Adjustment and Calibration via Web Browser
The Offset/Calibration page is available for amplifier adjustment. Using this page, the
offset can be adjusted and then the calibration executed.
These functions are also available via PLC. If the values for offset and gain are known,
they can be directly assigned to the respective parameters.
Figure 11: Offset compensation and calibration
09.09.2019
35
Page 36

Operating Instructions EMGZ492.EIP
9.4 Ethernet Settings
This page shows the current TCP/IP configuration. It cannot by changed via the web
interface, but read only.
Changes to this configuration can only be applied via the PLC.
Figure 12: Ethernet settings
9.5 System Settings
Using the System Settings page, the firmware version can be seen and new firmware
can be loaded as well.
Figure 13: System settings
You can find the current firmware files in the download area of our website.
09.09.2019
36
Page 37

Operating Instructions EMGZ492.EIP
10 Dimensions
Figure 14: EMGZ492.R.EIP housing for DIN rail mounting
Figure 15: EMGZ492.W.EIP housing for wall mounting
09.09.2019 37
Page 38

Operating Instructions EMGZ492.EIP
11 Technical Data
Technische Daten
Number of channels 2 channels for 2 or 4 force sensors
2 force sensors for left / signal processing of a single
measuring roller
4 force sensors for individual processing of 2 measuring
rollers, with 2 force sensors each
Force sensor power
supply
Input signal range ± 9 mV (max. 12.5 mV)
A/D converter
resolution
D/A converter
resolution
Measuring inaccuracy < 0.05 % FS
Connector for interface EMGZ 492.R: 2 x RJ-45
Parameterization via ETHERNET/IP or web server
Protection class IP 20 (.R Version); IP 65 (.W Version)
Power supply 24 VDC (18 to 36 VDC) / 5 W
Temperature range –10 to +50 °C (14 to 122 °F)
Weight 370 g / 0.82 lbs (.R Version);
5 VDC, max. 80 mA, highly stable
± 32‘768 Digit (16 Bit)
0 bis 4‘096 (12 Bit)
EMGZ 492.W: 2 x M 12 4-pole, D-coded
470 g / 1.04 lbs (.W Version )
09.09.2019 38
Page 39

Operating Instructions EMGZ492.EIP
EtherNet/IP characteristics
Cycle time ≥ 1 ms
IO Connection Types
Exclusive Owner; Listen Only; Input only
(implicit)
Number of Message
Connections
IO Connection Trigger
Explicit message connections (10); Implizit message
connections (5)
Cyclic
Types
Baud Rate 10 or 100 Mbit/s
Cyclic process data For channels A and B individually: Actual value in digits
(ADC); actual value in (N); actual value in (lbf); Actual
value in configured unit; status; Actual value sum (A + B);
actual value difference (A - B); mean value (A + B)/2
Acyclic Services Get_Attribute_Single; Set_Attribute_Single; according to
CIP spezification Volume 1 and Volume 2; ...
Ring Topology DLR (Device Level Ring)
Predefined Standard
Objects
Identity Object; Message Router Object; Assembly Object;
Connection Manager; DLR Object; QoS Object; TCP/IP
Interface Object; Ethernet Link Object
Features
DLR (Device Level Ring), beacon based ring node; ACD
(Address Conflict Detection); DHCP, BOOTP; Integrated
Switch
Web interface Configuration, measuring data queries via http (alternative
configuration via EtherNet/IP)
Certification according CT15
09.09.2019 39
Page 40

Operating Instructions EMGZ492.EIP
FMS Force Measuring Systems AG
Aspstrasse 6
8154 Oberglatt (Switzerland)
Tel. 0041 1 852 80 80
Fax 0041 1 850 60 06
info@fms-technology.com
www.fms-technology.com
FMS USA, Inc.
2155 Stonington Avenue Suite 119
Hoffman Estates,, IL 60169 (USA)
Tel. +1 847 519 4400
Fax +1 847 519 4401
fmsusa@fms-technology.com
FMS (UK)
Aspstrasse 6
8154 Oberglatt (Switzerland)
Tel. +44 (0)1767 221 303
fmsuk@fms-technology.com
FMS (Italy)
Aspstrasse 6
8154 Oberglatt (Switzerland)
Tel. +39 02 39487035
fmsit@fms-technology.com
09.09.2019 40
 Loading...
Loading...