

Festo YJKP Series, YJKP 12, YJKP 17, YJKP 0.8, YJKP 1.5 Instructions, Assembly, Installation
...
YJKP
Servo Press Kit
Instructions|
Assembly, Installation
8095980
8095980
2019-01e
[8095982]

Translation of the original instructions
CANopen®, EtherNet/IP®, MODBUS®, OPCUA®, PI PROFIBUS PROFINET® are registered trademarks of
the respective trademark owners in certain countries.
2 Festo — YJKP — 2019-01e

Table of contents
1 About this document................................................................................................... 4
1.1 Applicable documents.................................................................................................. 4
2 Safety........................................................................................................................... 5
2.1 Intended use................................................................................................................ 5
2.2 Foreseeable misuse...................................................................................................... 5
2.3 Training of qualified personnel..................................................................................... 5
3 Further information..................................................................................................... 5
4 Service..........................................................................................................................6
5 Product overview......................................................................................................... 7
6 Transport..................................................................................................................... 8
7 Mounting..................................................................................................................... 9
7.1 Preparation................................................................................................................... 9
7.2 Assembly...................................................................................................................... 9
8 Installation.................................................................................................................. 11
8.1 Safety............................................................................................................................ 11
8.2 Electrical installation - cables....................................................................................... 12
8.3 Electrical installation CECC-X-M1-YS............................................................................. 16
8.4 Electrical installation CMMP-AS.................................................................................... 23
8.5 I/O interface for STO [X40]............................................................................................ 26
9 Commissioning............................................................................................................ 27
10 Maintenance................................................................................................................ 29
10.1 Safety............................................................................................................................ 29
10.2 Maintenance work........................................................................................................ 29
10.3 Cleaning....................................................................................................................... 29
11 Repair........................................................................................................................... 29
12 Dismounting................................................................................................................ 30
13 Disposal........................................................................................................................30
14 Technical data............................................................................................................. 30
3Festo — YJKP — 2019-01e

About this document
1 About this document
1.1 Applicable documents
All available documents for the product èwww.festo.com/pk.
User documentation
Name, type Link, contents
Sensor SKDA-...-AB (operating instructions) èwww.festo.com/sp
Electric drive ESBF-BS (operating instructions) èwww.festo.com/sp
Axial kit EAMM-A (assembly instructions) èwww.festo.com/sp
Parallel kit EAMM-U (assembly instructions) èwww.festo.com/sp
Servo motor EMMS-AS-55 (operating instructions)
Servo motor EMMS-AS-70 (operating instructions)
Servo motor EMMS-AS-100 (operating instructions)
Servo motor EMMS-AS-140 (operating instructions)
Motor controller CMMP-AS-...-M0 (user documentation)
Controller CECC-X-M1 (user documentation) èwww.festo.com/sp
Encoder cable NEBM-M (assembly instructions) èwww.festo.com/sp
Encoder cable NEBM-T1G8 (assembly instructions)
Motor cable NEBM-M23G8 (assembly instructions)
Motor cable NEBM-T1G8 (assembly instructions) èwww.festo.com/sp
Connecting cable NEBS-M12G5-ES-...-LE5
(assembly instructions)
Connecting cable NEBC-S1WA9-P-1.5-N-BB-L2G4
(assembly instructions)
Connecting cable NEBC-S1G25-P-1.5-N-LE6
(assembly instructions)
Tab. 1 Further applicable documents on the Servo Press Kit
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
èwww.festo.com/sp
Festo — YJKP — 2019-01e4

Safety
Additional media
Name, type Contents
Web Help YJKP Operation of the software for Servo Press Kit
YJKP
Application note Application examples for connection and com-
missioning
èwww.festo.com/sp
Tab. 2 Additional media on the Servo Press Kit
The range of application and certifications of the individual components of the kit are described in
separate documents èwww.festo.com/sp.
2 Safety
2.1 Intended use
This product is a module for execution of joining tasks with monitoring of the joining process. The
module can be used within machines or automated systems with a higher-order controller.
Use the product only as follows:
– in perfect technical condition
– in its original condition, without unauthorised modifications
– Within the limits of the product defined by the technical data
– in an industrial environment
– permanently mounted
2.2 Foreseeable misuse
Construction of presses with manual loading or unloading in accordance with EC Machinery Directive
2006/42/EC Attachment IV Sec. 9 without further protective measures.
Never use the product as follows:
– With unauthorised modifications or alterations to the product
– With load limits exceeded
– In an invalid mounting position
2.3 Training of qualified personnel
Installation, commissioning, maintenance and disassembly should only be conducted by qualified personnel.
The personnel must be familiar with the installation of mechatronic control systems.
3 Further information
– Accessories èwww.festo.com/catalogue.
– Spare parts èwww.festo.com/spareparts.
5Festo — YJKP — 2019-01e

Service
4 Service
Contact your regional Festo contact person if you have technical questions èwww.festo.com.
6 Festo — YJKP — 2019-01e

Product overview
5 Product overview
1
Servo motor EMMS-AS
2
Axial/parallel kit EAMM-A/U
3
Electric drive ESBF-BS
4
Sensor SKDA-...-AB
5
Connecting cable NEBS-M12G5-ES-...-LE5
6
Encoder cable NEBM
7
Motor cable NEBM
8
LAN cable (not in scope of delivery)
Fig. 1 Product overview
9
Connecting cable NEBC-S1WA9-P-1.5-N-BBL2G4
10
Controller CECC-X-M1-YS
11
Memory card
12
Motor controller CMMP-AS
13
Connecting cable NEBC-S1G25-P-1.5-N-LE6
14
Higher-order controller (not in scope of
delivery)
15
Switch (not in scope of delivery)
16
Laptop (not in scope of delivery)
7Festo — YJKP — 2019-01e

Transport
6 Transport
Sequence of transport and unpackaging
NOTICE!
Damage to the product due to incorrect transport.
• Observe the transport labelling and information on the packaging.
1. Transport the product to the installation/storage location in its packaging and set it down on a
firm and flat base.
2. When storing: Pay attention to the storage conditions è 14 Technical data.
NOTICE!
Damage to the product due to incorrect unpacking.
• Observe the labelling and information on unpacking shown on the packaging.
• Unpack the product with at least 2 persons present.
• Use appropriate tools.
• Parts of the packaging are large and heavy:
– Do not let any parts fall onto the product.
– Use suitable aids to raise and lower the product (e.g. crane).
3. Remove the packaging in accordance with the printed sequence.
Restraints in the packaging
Transport restraints prevent uncontrolled movement of the product in the packaging during transport
and installation. The product is provided with the following designated transport restraints:
Fig. 2 Transport screws
8 Festo — YJKP — 2019-01e

Mounting
Fig. 3 Cable ties
7 Mounting
7.1 Preparation
Fitting space
The fitting space required for the product depends on the selected size of the Servo Press Kit and the
following factors:
– Stroke of the electric cylinder èwww.festo.com/catalogue
– Attachment position and type of motor
Unintentional lowering of the piston rod is possible at any time. The axis cannot be pushed back
manually. If necessary, the electric cylinder may need to be dismantled.
Mounting surface
The mounting surface must exhibit the following characteristics:
– torsionally rigid
– free of stress
– sufficient strength to absorb the maximum forces
– sufficient evenness
7.2 Assembly
WARNING!
Risk of injury due to lowering piston rod.
• Before working on the product: Secure the piston rod to prevent it from lowering.
CAUTION!
Risk of injury due to falling product.
• Make sure the mounting surface is sufficiently strong to absorb the maximum forces.
• Only use the supplied mounting components.
• Secure the screw connections.
9Festo — YJKP — 2019-01e

Mounting
In the Servo Press Kit, the electric drive, axial or parallel kit and servo motor can be pre-assembled.
With individual components, the following assembly steps are required.
Assemble the motor mounting kit
Depending on the configuration, an axial or parallel kit can be assembled.
Assemble the axial kit EAMM-A
Fig. 4 Axial kit EAMM-A
èPay attention to the accompanying documentation: Axial kit EAMM-A (assembly instructions)
èwww.festo.com/sp
• Assemble the axial kit EAMM-A
Assemble the parallel kit EAMM-U
Fig. 5 Parallel kit EAMM-U
èPay attention to the accompanying documentation for EAMM-U.
èwww.festo.com/sp
• Assemble the parallel kit EAMM-U.
Mount the drive unit on the frame
èPay attention to the accompanying documentation for ESBF.
èwww.festo.com/sp
• Mount the complete unit consisting of axis, axial/parallel kit and motor on the customer-provided
frame so that it is tension-free.
10 Festo — YJKP — 2019-01e

Installation
Assemble the sensor SKDA
Fig. 6 Sensor SKDA
èPay attention to the accompanying documentation for SKDA.
èwww.festo.com/sp
1. Do not screw the lock nut up to the stop on the ESBF-BS.
2. Screw the sensor on the ESBF-BS.
3. Apply the lock nut to secure the sensor.
Additional steps
1. Insert the memory card (microSD card) into the CECC-X-M1-YS.
2. Assemble the CECC-X-M1-YS.
èPay attention to the accompanying documentation for the CECC-X-M1-YS.
èwww.festo.com/sp
3. Assemble the CMMP-AS.
èAccompanying documentation for the CMMP-AS.
èwww.festo.com/sp
Up-to-date information on the accessories èwww.festo.com/catalogue.
8 Installation
8.1 Safety
WARNING!
Risk of injury due to lowering piston rod.
• Before working on the product: Secure the piston rod to prevent it from lowering.
WARNING!
Risk of injury due to unexpected movement of the product.
Electrical energy can cause unexpected movement of the product.
• Before working on the product: Switch off the power supply, ensure that it is off and secure it
against being switched on again.
11Festo — YJKP — 2019-01e

Installation
NOTICE!
Material damage as a result of using the wrong connections.
In accordance with intended use, all unnamed connections must not be used.
Details on handling the individual components of the kit are described in separate documents
èwww.festo.com/sp.
8.2 Electrical installation - cables
Connecting cable NEBS-M12G5-ES-...-LE5
The connecting cable connects the sensor on the electric drive with the analogue input [X19] on the
controller.
The accompanying plug must be assembled on the open cable ends.
Sensor SKDA Controller CECC-X-M1-YS
Connection Pin Wire colour
1)
Use Pin Connection [X19]
1 BN 24VDC
X19.0.1
Power supply for
sensor
2 WH Not used
3 BU Input 4…20mA
X19.0.2
Evaluation of the
sensor signal
through servo
press software
4 BK Not used
5 GY Not used
Braided screen Apply braided
screen in direct
proximity of controller and sensor
with a large surface area
1) Colour code in accordance with IEC 60757:1983-01
Tab. 3 Sensor connecting cable - analogue inputs [X19]
1. Connect connecting cable to the sensor.
2. Place the open cable ends in the plug provided in accordance with the table.
12 Festo — YJKP — 2019-01e

Installation
Fig. 7 Screening clamp, controller side
Fig. 8 Screening clamp, sensor side
3. Partially remove the cable sheath on both sides and apply the braided screen across a large sur-
face area with screening clamps 1. Provide strain relief with cable binders 2 over the cable outer
sheath.
4. Insert the plug into the connection [X19.0] of the controller.
Connecting cable NEBC-S1WA9-P-1.5-N-BB-L2G4
The connecting cable connects the CANopen interface [X4] of the motor controller with the CANopen
interface [X18] of the controller.
The cable is readily assembled.
1. Insert the plug into the connection [X4] of the motor controller.
2. Insert the plug into the connection [X18] of the controller.
Connecting cable NEBC-S1G25-P-1.5-N-LE6
The connecting cable is used to provide power to the digital controller interface [X1] of the motor controller.
The circuitry should be carried out in accordance with the following table.
13Festo — YJKP — 2019-01e

Installation
Motor controller
Provided by the customer
CMMP-AS-...-M0
Connection [X1] Pin Wire colour
1)
Use Type
YJKP
0.8/
node number bit1
1.5/4
7/ 12/ 1-7+24VDC
8 YE Fieldbus: offset
All GND
node number bit3
9 GY Controller enable All +24VDC
0.8/ 1.5-
node number bit 0
/ 7/ 12
4/ 17 +24VDC
20 GN Fieldbus: offset
All GND
node number bit 2
21 PK Output stage
All +24VDC
enable
1) Colour code in accordance with IEC 60757:1983-01
Tab. 4 Connecting cable wiring, digital control interface [X1]
1. Insert plug into the connection [X1] of the motor controller.
2. Place the open cable ends in accordance with the table.
If a customer-specific connecting cable is used, the following PIN must also be laid:
Connection
GND7 BN Fieldbus: offset
GND19 WH Fieldbus: offset
Motor controller
CMMP-AS-...-M0
Connection [X1] Pin Wire colour
1)
Use Connection
Provided by the customer
3, 11,14- - GND
16, 23 - - +24VDC
1) Colour code in accordance with IEC 60757:1983-01
Tab. 5 Connecting cable wiring, digital control interface [X1] - customer-specific
1. Insert plug into the connection [X1] of the motor controller.
2. Place the additional open cable ends in accordance with the table also.
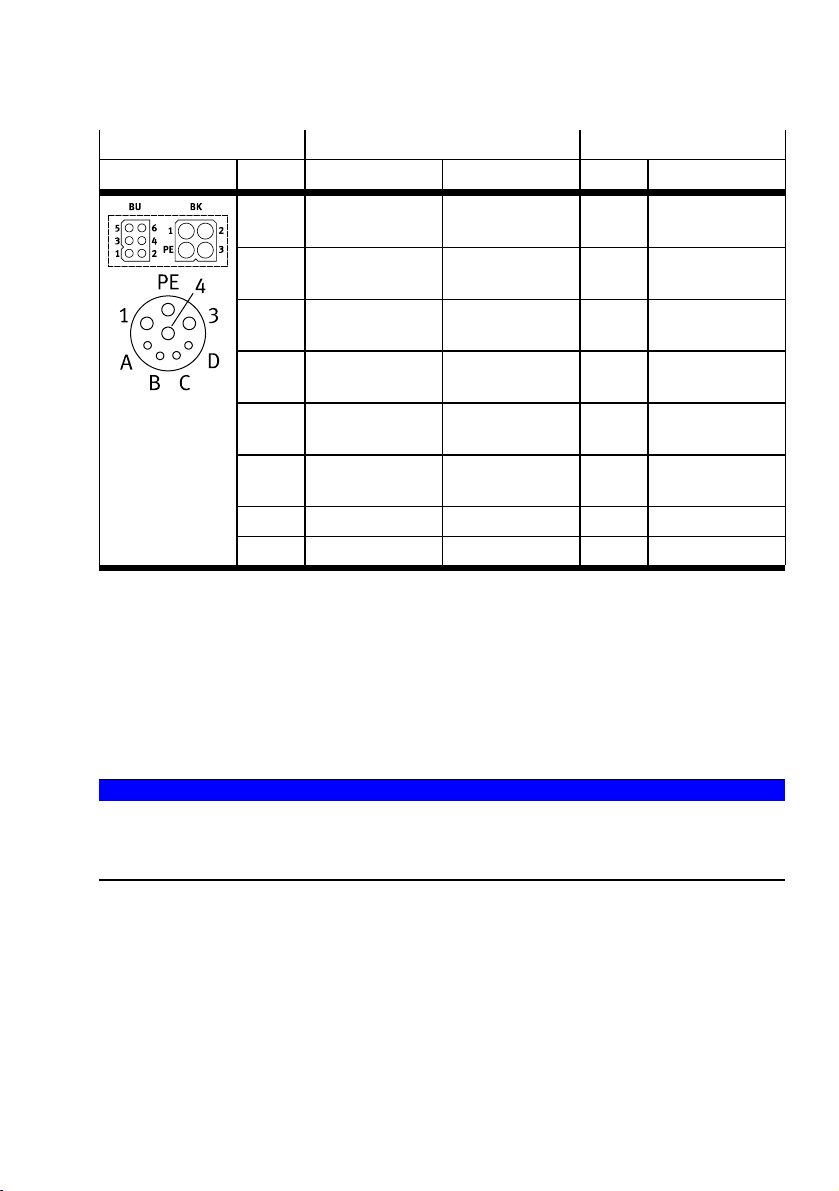
Motor cable NEBM-M23G8-E-...-Q9N-LE8; NEBM-T1G8-E-...-Q7N-LE8
The motor cable connects the connection [X6] on the servo motor with the connection [X6] on the
motor controller. The circuitry should be carried out in accordance with the following table.
The circuitry should be carried out in accordance with the following table.
14 Festo — YJKP — 2019-01e
Installation
Servo motor EMMS-AS Motor controller CMMP-AS
Connection [X6] Pin Wire colour
1)
Use Pin Connection [X6]
BK 2 Motor power sup-
8 V
ply
BK 3 Motor power sup-
7 W
ply
BK 1 Motor power sup-
9 U
ply
GNYE Motor power sup-
6 PE
ply
BN Temperature
5 +MTdig
sensor
WH Temperature
4 -MTdig
sensor
GN Brake (optional) 2 BR+
YE Brake (optional) 1 BR-
1) Colour code in accordance with IEC 60757:1983-01
Tab. 6 Motor cable
1. Insert the plug into the connection [X6] of the servo motor.
2. Place the open cable ends in accordance with the table in the connection [X6] of the motor controller.
Encoder cable NEBM-M12W8-E-...-N-S1G15; NEBM-T1G8-E-...-N-G1G15
The encoder cable connects the connection [X2] on the servo motor with the connection [X2B] on the
motor controller.
The cable is readily assembled.
NOTICE!
Restart single-turn encoder.
Loss of the reference position.
• Homing is required at the restart of the encoder.
1. Insert the plug into the connection [X2] of the servo motor.
2. Insert the plug into the connection [X2B] of the motor controller.
15Festo — YJKP — 2019-01e

Installation
8.3 Electrical installation CECC-X-M1-YS
Overview of interfaces
1
Ethernet interface [X8]
2
USB interface [X9]
3
Functional earth connection
4
I/O interfaces [X2, X3, X4]
5
Power supply [X1]
Fig. 9 Interfaces, front
6
Status LEDs
7
Memory card
8
Power supply [X5] for digital outputs
9
CANopen interface [X18]
10
Digital outputs [X20]
11
Digital inputs [X17]
12
Analogue inputs [X19]
Fig. 10 Interfaces, lower
NOTICE!
Material damage as a result of using the wrong connections.
In accordance with intended use, all unnamed connections must not be used.
The status LEDs show the operating status of the controller.
Status LED Meaning
[Run] Application status
[Error] Error
[Net] Device detected
16 Festo — YJKP — 2019-01e

Installation
Status LED Meaning
[Mod] Reserved
Tab. 7 Status LEDs
Overview of connection and plug/cable: CECC-X-M1-YS
Connection Plug/cable Purpose
[X1] NECC-L2G4-C1
[X5] NECC-L2G2-C1
[X2] NECC-L2G8-C1
[X3] NECC-L2G6-C1
[X4] NECC-L2G4-C1
[X8] Standard LAN patch cable
1)
1)
1)
1)
1)
Power supply for device
Power supply for digital outputs
I/O interface
2)
Ethernet interface
[X9] USB port
[X17] 2x NECC-L2G6-C1
1)
Digital inputs
[X18] NECC-L2G4-C1 CANopen interface
[X20] NECC-L2G2-C1
1) Plug for customer-provided cable
2) not included in the scope of delivery of the kit
1)
Digital outputs
Tab. 8 Connection and plug
Power supply [X1]
WARNING!
Risk of injury due to electric shock.
• For the electric power supply, use only PELV circuits that ensure a reliable electric disconnection
from the mains network.
• Observe IEC60204-1/EN60204-1.
– Power supply for device, digital and analogue inputs
Resultant current for all supplied ports: £750mA
–
Of which intrinsic current consumption: £200mA
–
– Use an external overload protection for the power supply of the device.
Terminal Connection Use
X1.1 24 24 V DC
X1.2 0 0 V DC
X1.3 Functional earth
X1.4 Not assigned
–
Tab. 9 Power supply connection for device, digital and analogue inputs
17Festo — YJKP — 2019-01e

Installation
1. Supply the device with power.
2. Place the open cable ends in the plug provided in accordance with the table.
3. Insert the plug into the connection [X1] of the controller.
Power supply [X5]
– Power supply for digital outputs.
Resultant current for all supplied ports: £5A
–
Terminal Connection Use
X5.1 24 24VDC
X5.2 0 0VDC
Tab. 10 Connection, power supply for digital outputs
1. Supply the device with power.
2. Place the open cable ends in the plug provided in accordance with the table.
3. Insert the plug into the connection [X5] of the controller.
I/O interface [X2, X3, X4]
Terminal Connection Use
X2.0…X2.7 8 digital inputs Configurable as step enabling
condition in the sequencer of
the press process: DI1…DI8
X3.0 Start the press process
6 digital inputs
1)
Manual operating mode: plot
the reference curve
Automatic operating mode:
start the press process
X3.1 "Manual" operating mode
X3.2 "Automatic B" operating
1)
mode
X3.3 Start homing
X3.4 Acknowledge errors
X3.5
Terminate press process
1)
1)
1)
2)
X4.0…X4.3 4 digital outputs Configurable as output signals
in the sequencer of the press
process: DO1…DO4
1)
24VDC output set by the software as soon as certain event
occurs (position reached, force
reached).
1)
1)
18 Festo — YJKP — 2019-01e

Installation
Terminal Connection Use
X4.4…X4.7 Not assigned
1) For details, see online help
2) Process termination if input = FALSE.
–
Tab. 11 I/O interface connection
Ethernet interface [X8]
The Ethernet interface is designed as an RJ45 socket and supports gigabit LAN.
The following protocols are supported:
– EtherNet/IP (Server)
– ModbusTCP (Server)
– Ethernet TCP/IP
– PROFINET IO
– OPCUA (Only possible with the optional software extension package.)
The interface [X10] of the controller is not supported. The controller cannot be used as a switch.
The Ethernet interface is used to configure and parameterise the system through a PC/tablet connected to the network. After the mechanical and electrical installation, the servo press kit can be commissioned with a web browser. Control and process data can be exchanged with a higher-order controller
through this interface during the run-time of the system.
A requirement for this is integration of the CECC-X-M1-YS in the local network.
Minimum requirements for a PC/tablet
– Web browser with Java Script and support of HTML5 Canvas, e.g. Firefox, Chrome, Internet
Explorer ³ Version9
– Screen resolution 1024 x 768 pixels
Access is through entry in the address line: http://<<IP address>>:8080/servo_press_kit.htm
Example: http://192.168.4.2:8080/servo_press_kit.htm
NOTICE!
Unauthorised access to the device can cause damage or malfunctions.
When connecting the device to a network, protect the network from unauthorised access.
Measures to protect the network include:
• Firewall
• Intrusion Prevention System (IPS)
• Network segmentation
• Virtual LAN (VLAN)
• Virtual Private Network (VPN)
• Security at physical access level (Port Security)
USB interface [X9]
The controller offers the option of connecting the USB memory stick up to 32GB to the USB interface
[X9] and saving the press results.
19Festo — YJKP — 2019-01e

Installation
The USB interface is compatible with the USB 3.0 and USB 2.0 standards. It is suitable for USB plug
type A.
Digital inputs [X17]
The digital inputs, configured in 3-wire connection technology, are not galvanically separated. The
ground potential for all inputs relates to GND of the power supply [X1].
For connecting additional sensors (e.g. external cylinder limit switches, workpiece inspection) with
3-wire connection technology: Use 3 adjacent terminals each.
NOTICE!
Material damage or loss of function due to incorrect I/O circuitry.
• All digital inputs/outputs are designed as PNP. Use only corresponding circuitry.
Terminal Connection Use
X17.0.1 24VDC Power supply 24VDC for pro-
gram selection bit 0
1)
X17.0.2 Input DI9 Program selection bit 0
X17.0.3 GND logic Power supply GND sensor for
program selection bit 0
X17.1.1 24VDC Power supply 24VDC sensor
for program selection bit 1
X17.1.2 Input DI10 Program selection bit 1
X17.1.3 GND logic Power supply GND sensor for
program selection bit 1
X17.2.1 24VDC Power supply 24VDC sensor
for program selection bit 2
X17.2.2 Input DI11 Program selection bit 2
X17.2.3 GND logic Power supply GND sensor for
program selection bit 2
X17.3.1 24VDC Power supply 24VDC sensor
for program selection bit 3
X17.3.2 Input DI12 Program selection bit 3
X17.3.3 GND logic Power supply GND sensor for
program selection bit 3
X17.4.1 24VDC Power supply 24VDC
2)
X17.4.2 Servo press activation Release of motor controller out-
put stage via controller
CECC-X-M1-YS
X17.4.3 GND logic Power supply GND
2)
20 Festo — YJKP — 2019-01e

Installation
Terminal Connection Use
X17.5.1 24VDC Power supply 24VDC
2)
X17.5.2 Activation of step operation Press process in step operation
X17.5.3 GND logic Power supply GND
X17.6.1…X17.6.3 Not assigned
X17.7.1…X17.7.3 Not assigned
1) optional
2) reserve
–
–
2)
Tab. 12 Connection of digital inputs
Digital outputs [X20]
The digital outputs, configured in 2-wire connection technology, are galvanically separated. The current load for each output is 0.5 A.
The ground potential for all outputs relates to GND of the power supply [X5]. All outputs are protected
against short circuit and thermal overload.
NOTICE!
Material damage or loss of function due to incorrect I/O circuitry.
• All digital inputs/outputs are designed as PNP. Use only corresponding circuitry.
Fig. 11 PNP circuit
Use 2 adjacent terminals when connecting a consumer.
Terminal Connection Allocation Comments
X20.0.1 Signal P Error 0.5 A per channel, SSR
X20.0.2 Not assigned
– –
X20.1.1 Signal P Servo press ready for
operation
X20.1.2 Not assigned
– –
1)2)
0.5A per channel, SSR
1)2)
X20.2.1 Signal P Homing requirement 0.5A per channel, SSR
1)2)
X20.2.2 Not assigned
– –
21Festo — YJKP — 2019-01e

Installation
Terminal Connection Allocation Comments
X20.3.1 Signal P Press result OK 0.5A per channel, SSR
1)2)
X20.3.2 Not assigned
– –
X20.4.1 Signal P Press result not OK 0.5A per channel, SSR
1)2)
X.20.4.2 Not assigned
X20.5.1 Signal P Servo press activated
X20.5.2 Not assigned
X20.6.1 Signal P Program step com-
– –
–
– –
–
pleted
X20.6.2 Not assigned
X20.7.1…X20.7.2 Not assigned
1) SSR: Solid State Relay
2) For details, see online help
– –
– –
Tab. 13 Terminal allocation of digital outputs
Card slot for memory card
• Plug the memory card laterally into the device so the system can run.
Configurations, programs and results of press processes can be stored.
Ä
22 Festo — YJKP — 2019-01e

Installation
8.4 Electrical installation CMMP-AS
Overview of interfaces
1
2
3
4
5
6
7
8
Activation of firmware download
Activation of CANopen terminating resistor
CANopen interface [X4]
Ethernet interface [X18]
7-segments display
Reset button
Status LEDs
Digital I/O interface for control of the STO function
[X40]
Fig. 12 Interfaces, front
23Festo — YJKP — 2019-01e

Installation
Fig. 13 Interfaces, upper
1
Digital control interface [X1]
2
Power supply [X9]
3
PE connection
24 Festo — YJKP — 2019-01e

Installation
1
Motor connection [X6]
2
Encoder connection [X2B]
Fig. 14 Interfaces, lower
NOTICE!
Material damage as a result of using the wrong connections.
In accordance with intended use, all unnamed connections must not be used.
The status LEDs show the operating status of the motor controller.
Status LED Meaning
Ready/Error Status
Enable Enable
CAN CAN bus status indication
Tab. 14 Status LEDs
Overview of connection and plug/cable: CMMP-AS
Connection Plug/cable Purpose
[X1] Connecting cable
NEBC-S1G25-P-1.5-N-LE6
Digital control interface for customer connection
[X2B] Encoder cable Connection for servo motor
encoder connection
25Festo — YJKP — 2019-01e

Installation
Connection Plug/cable Purpose
[X4] Connecting cable
NEBC-S1WA9-P-1.5-N-BB-L2G4
Connection for controller
CECC-X-M1-YS
[X6] Motor cable Connection for servo motor con-
nection
[X9] Plug
[X18] Standard LAN patch cable
1)
2)
Power supply
Ethernet interface
[X40] Plug Interface for STO function
1) Plug for customer-provided cable
2) not included in the scope of delivery of the kit
Tab. 15 Connection and plug
Basic setting of DIP switch
The two DIP switches on the motor controller CMMP-AS must be set to a defined basic setting in this
application.
1. Set switch [S2] to the position [0].
2. Set switch [S3] to the position [0].
Power supply [X9]
• Connect the power supply in accordance with the table è 1.1 Applicable documents.
Force range Power supply
Up to 4kN 100…230V AC (1 phase)
From 7kN 230…480VAC (3 phases)
Tab. 16 Power supply
Ethernet interface [X18]
The Ethernet interface is used to for the connection with the higher-order controller.
8.5 I/O interface for STO [X40]
The STO function is described in the additional documents è 1.1 Applicable documents.
Motor controller Design on the device Counterplug
CMMP-AS PHOENIX MINICOMBICON MC
1.5/8-GF-3.81 BK
Tab. 17 Plug design [X40]
26 Festo — YJKP — 2019-01e
PHOENIX MINICOMBICON MC
1.5/8-STF-3.81 BK

Commissioning
[X40] Pin Designation Value Specification
1 STO-A 0V / +24VDC Control input A for
the function STO
2 0V-A 0V Reference potential
for STO-A
3 STO-B 0V / +24VDC Control input B for
the function STO
4 0V-B 0V Reference potential
for STO-B
5 C1
–
Acknowledgment
contact for the STO
status on an external
controller
6 C2
–
Acknowledgment
contact for the STO
status on an external
controller
7 24V +24VDC Output for auxiliary
power supply
(24VDC logic supply of the motor controller brought out)
8 0V 0V Reference potential
for auxiliary power
supply
Tab. 18 Assignment [X40]: I/O interface for STO
Circuitry with use of the STO safety function [X40]
• To work safely with the STO safety function (safe torque off), please observe the additional
information in the further applicable documents è 1.1 Applicable documents.
9 Commissioning
WARNING!
Risk of injury due to unexpected movement of the product.
Electrical energy can cause unexpected movement of the product.
• Before working on the product: Switch off the power supply, ensure that it is off and secure it
against being switched on again.
The first steps for commissioning the servo press kit are made with the help of the Festo Field Device
Tool (FFT èwww.festo.com/sp).
27Festo — YJKP — 2019-01e

Commissioning
Requirements
– PC with FFT as well as control and motor controller are connected over the same network.
– Participants (control, motor controller) are connected directly over a switch.
Port Description TCP/UDP
161 PROFINET (use of SNMP)
80, 8080 HTTP. Access to the servo press
TCP
software
20, 21 FTP TCP
1024 - 65535 FTP logging
TCP
Depending on the FTP server
configuration, ports in this area
have to be released.
4444 Control of servo press via
TCP
TCP/IP
502 Modbus TCP
44818 EtherNet/IP TCP
2222 EtherNet/IP UDP
10002 Festo Field Device Tool UDP/TCP
445 SMB TCP
4840, 443 OPCUA TCP
Tab. 19 Ports for servo press controller
Preparation with the FFT
1. Preparation with the FFT: set network parameters of the controller CECC-X-M1-YS.
2. Set network parameters of the motor controller CMMP-AS.
3. Optional: update firmware and software.
– Firmware update for controller CECC-X-M1-YS
– Firmware update for motor controller CMMP-AS
– Software update for servo press software on the controller CECC-X-M1-YS
Examples with explanations in the application notes from Festo èwww.festo.com/sp.
NOTICE!
Increased wear in case of operation with too little stroke.
• Observe the minimum stroke.
• If undercut: minimum stroke of 12.5mm must be traversed 10 times in every 100 movement
cycles.
28 Festo — YJKP — 2019-01e
Maintenance
10 Maintenance
10.1 Safety
WARNING!
Risk of injury due to lowering piston rod.
• Before working on the product: Secure the piston rod to prevent it from lowering.
WARNING!
Risk of injury due to unexpected movement of the product.
Electrical energy can cause unexpected movement of the product.
• Before working on the product: Switch off the power supply, ensure that it is off and secure it
against being switched on again.
10.2 Maintenance work
The maintenance work required for the individual components of the kit is described in the further
applicable documents è 1.1 Applicable documents.
Interval Maintenance work
At least once a year - depending on the number
of movements and load
Tab. 20 Maintenance work
Check the mounting of the force sensor.
With the parallel kit: check the toothed belt for
wear and pretension. If the toothed belt breaks,
the axis can fall down in an uncontrolled manner.
With the axial kit: check the mounting (locking
screw) of the coupling on a regular basis.
10.3 Cleaning
NOTICE!
Material damage due to incorrect cleaning.
• Do not clean the guide elements.
• Clean product only with non-abrasive cleaning agents and a soft cloth.
The procedure for cleaning the individual components of the kit is described in the further applicable
documents è 1.1 Applicable documents.
11 Repair
Repair is described in separate documents èwww.festo.com/sp.
For additional support for repairs: Consult your regional Festo contact.
29Festo — YJKP — 2019-01e

Dismounting
12 Dismounting
WARNING!
Risk of injury due to unexpected movement of the product.
Electrical energy can cause unexpected movement of the product.
• Before working on the product: Switch off the power supply, ensure that it is off and secure it
against being switched on again.
WARNING!
Risk of injury due to unexpected movement of the product when lifting it.
• Secure movable components with transport locks to prevent unexpected movement.
• Use all of the transport lugs.
• Observe the position of the centre of gravity.
Details on handling the individual components of the kit are described in separate documents
èwww.festo.com/sp.
13 Disposal
ENVIRONMENT!
Send the packaging and product for environmentally sound recycling in accordance with the current
regulations èwww.festo.com/sp.
14 Technical data
General features
Servo Press Kit YJKP 0.8 1.5 4 7 12 17
Max. pressing force [kN] 0.8 1.5 4 7 12 17
Max. payload [kg] 19.5 19.5 48 48 95 95
PLC interface Ethernet (EtherNet/IP, ModbusTCP, Ethernet TCP/IP,
PROFINETIO, OPCUA
Duty cycle [%] 100
Mounting position Any
Control CECC-X-M1-YS
Motor controller
CMMP-AS-...-M0
30 Festo — YJKP — 2019-01e
1)
C2-3A C5-3A C5-11A-P3 C10-11A-
P3

Technical data
Servo Press Kit YJKP 0.8 1.5 4 7 12 17
Servo motor
55-M 70-S 100-S 100-M 140-L
EMMS-AS-...-HS
Electric drive
Electric drive
32-...2)40-...2)50-...2)63-...2)80-...
2)
100-...
ESBF-BS-...-5P
Spindle pitch [mm] 5
Repetition accuracy [mm] ± 0.01 ± 0.015 ± 0.01
Feed speed [mm/s] £250 £160
Acceleration
Deceleration
Quick-stop decelera-
3)
4)
[m/s2] 2
[m/s2] 2
[m/s2] 5
tion
Motor attachment posi-
Axial, parallel
tion
Force sensor
Force sensor
0.8 1.5 4 7 12 17
SKDA-...-AB
Max. overload [kN] ± 1.5 ± 3.75 ± 11.25 ± 15 ± 30 ± 37.5
Scanning frequency [Hz] 1000
Accuracy of measure-
[%FS] £± 0.25
ment
1) The system can permanently press with nominal force against a component/load (with v less than 50 mm/s).
2) Working stroke [mm]: 100, 200, 300, 400
3) Acceleration for positioning procedures
4) Deceleration when force is reached
Tab. 21 Technical data YJKP
Technical data of the main components
2)
Controller
CECC-X-M1-YS
Operating voltage [X1,
[VDC] 19.2…30
X5]
Operating voltage [X21] [VDC] 19.2…50
Nominal current con-
[mA] 200
sumption at 24VDC
31Festo — YJKP — 2019-01e

Technical data
Controller
CECC-X-M1-YS
Reverse polarity pro-
No
tection
Fan noise LpAeq (1m
[dB(A)] 35.7
distance)
Memory card
Supported type microSD
Capacity [GByte] 32
File system FAT32
Analogue input [X19]
Input signal [mA] 0…20
Resolution 14 bit
Hardware
Processor (CPU) Dual core, 2 x 866 MHz
Total main memory [MByte] 512
Tab. 22 Technical data CECC-X-M1-YS
Motor controller
C2-3A-M0 C5-3A-M0 C5-11A-P3-M0 C10-11A-
CMMP-AS
Nominal voltage [VDC] 24 ± 20 %
Nominal current
Max. current for hold-
1)
[A] 0.55 0.65 1
[A] 1 2
ing brake
Type of mounting Screwed onto sub-base
Display 7-segment display
Device profile CANopen DS402
Dimensions (HxWxD) 2)[mm] 202x66x207 227x66x207 252x79x247
Mounting plate dimen-
[mm] 248x61 297x75
sions
1) Plus current consumption from an existing holding brake and I/Os
2) Without plug, shield screw and screw heads
Tab. 23 Technical data CMMP-AS
P3-M0
32 Festo — YJKP — 2019-01e

Technical data
Product weight
Servo Press Kit YJKP 0.8 1.5 4 7 12 17
CECC-X-M1-YS [kg] 0.41
CMMP-AS-...-M0 [kg] 2.1 2.2 3.5
Servo motor
Servo motor
55-M 70-S 100-S 100-M 140-L
EMMS-AS-...-HS
Basic weight [kg] 1.6 2.1 4.8 6.9 16.2 16.2
Additional weight of
[kg] 0.1 0.2 0.5 0.6 0.8 0.8
brake
Electric drive
Electric drive
32-a 40-a 50-a 63-a 80-a 100-a
ESBF-BS-...-5P
Basic weight with
[kg] 0.781 1.237 1.982 3.163 7.393 11.123
0mm stroke
Additional weight per
[kg] 0.33 0.47 0.65 0.87 1.55 1.93
100mm stroke
Force sensor
Force sensor
0.8 1.5 4 7 12 17
SKDA-..-AB
Basic weight [kg] 0.2 0.2 0.3 0.3 0.7 0.7
Connecting kit
Parallel kit [kg] 1.05 2.45 4.99 4.95 11.9 11.8
Axial kit [kg] 0.26 0.41 1.14 1.17 2.92 3.46
Tab. 24 Technical data, product weight
Operating and storage conditions
Feature
Storage temperature [°C] –10…+60
Storage location Dry, solid and flat base (in original packaging)
Max. storage time 48 months
Ambient temperature [°C] 0…+40
Air humidity [%] 0…90 (non-condensing)
33Festo — YJKP — 2019-01e

Technical data
Feature
Corrosion resistance
1)
0
class CRC
Permissible installation altitude above sea level
At nominal power [m] 1000
With performance
reduction
1) No corrosion stress. Applies to small, optically irrelevant standard parts such as threaded pins, circlips and clamping sleeves which
are usually only available on the market in a phosphated or burnished version (and possibly oiled) as well as to ball bearings (for components < CRC 3) and plain bearings.
2) Above 1000 m above sea level, performance reduction of 1 % per 100 m
2)
[m] 1000…2000
Tab. 25 Technical data, operating and storage conditions
34 Festo — YJKP — 2019-01e


Reproduction, distribution or sale of this document or communication of its contents to others without express authorization is
prohibited. Offenders will be liable for damages. All rights
reserved in the event that a patent, utility model or design patent
is registered.
Copyright:
Festo AG & Co. KG
73734 Esslingen
Ruiter Straße 82
Germany
Phone:
+49 711 347-0
Fax:
+49 711 347-2144
e-mail:
service_international@festo.com
Internet:
www.festo.com
 Loading...
Loading...