

Festo EMMS-AS-100-M-RSB, EMMS-AS-100-M-RR, EMMS-AS-100-M-RM, EMMS-AS-100-M-RMB, EMMS-AS-100-M-RRB Operating Instructions Manual
...Page 1

Servomotor
EMMS-AS-100-M…
Festo AG & Co. KG
Postfach
73726 Esslingen
+49 711 347-0
www.festo.com
Bedienungsanleitung 8041671
1411e
[8041672]
Original: de
EMMS-AS-100-M… Deutsch...........................................
Hinweis
Einbau und Inbetriebnahme darf nur durch Fachpersonal mit entsprechender
Qualifikation gemäß dieser Bedienungsanleitung durchgeführt werden.
Beim Einsatz in sicherheitsrelevanten Applikationen sind zusätzliche Maßnah
men notwendig, in Europa z. B. die Beachtung der unter der EG-Maschinenricht
linie gelisteten Normen. Ohne zusätzliche Maßnahmen entsprechend gesetzlich
vorgegebener Mindestanforderungen ist das Produkt nicht als sicherheitsrele
vantes Teil von Steuerungen geeignet.
Beachten Sie, dass an Hand des Typenschilds die Ausstattung des EMMS-AS
ermittelt werden kann. Je nach Bestellung enthält dieser Motor eine Halte
bremse (EMMS-…-RSB/RMB/RRB) sowie entweder einen Encoder
(EMMS-…-RS…/RM…) oder einen Resolver (EMMS-…-RR…).
Elektrostatische Kontaktentladungen auf den Motor von mehr als 3,2 kV können
sporadisch zu Funktionsstörungen des Motors führen.
Bedienteile und Anschlüsse
Motor mit Encoder Motor mit Resolver
1
2
3
4
5
7
6
8
9
aJ
1 Stecker für Anschlussleitung:
– Motor
– Haltebremse (nur bei RSB/RMB)
– Temperatursensor
2 Stecker für Anschlussleitung:
– Encoder
3 Bohrungen zur Befestigung
4 Welle
5 Motorflansch
6 Hinweis: Keine mechanischen
Schläge zulässig
7 Warnung vor heißer Oberfläche
8 Warnung vor gefährlicher
elektrischer Spannung
9 Stecker für Anschlussleitung:
– Motor
– Haltebremse (nur bei RRB)
– Temperatursensor
aJ Stecker für Anschlussleitung:
– Resolver
Fig. 1
1 Funktion und Anwendung
Der EMMS-AS ist ein permanenterregter, elektrodynamischer, bürstenloser Servo
motor. Ab Werk ist der EMMS-AS je nach Bestellcode mit einem Encoder oder
einem Resolver ausgestattet.
Der Encoder liefert Motordaten, Drehzahl- und Positionssignale in Form von digi
talen Signalen an einen übergeordneten Controller.
Der Resolver liefert ein analoges Signal an einen übergeordneten Controller, aus
dem dieser Controller Drehzahl- und Positionsinformationen ermitteln kann.
Der Motor ist stets innerhalb seiner Kennlinien zu betreiben.
Der EMMS-AS ist mit folgenden Optionen lieferbar:
EMMS-AS-… Option
…-RS/RSB Single-Turn-Encoder zur Positionsüberwachung
…-RM/RMB Multi-Turn-Encoder zur Positionsüberwachung
…-RR/RRB Resolver zur Positionsüberwachung
…-RSB/RMB/RRB Haltebremse
…-S1 Schutzklasse IP65 (Wellendichtring)
1)
EMGA (è Zubehör) Getriebe
1) Radialwellendichtringe sind schleifende Dichtungen und unterliegen grundsätzlich einem Verschleiß.
Näher Information hierzu finden Sie auf dem Festo Supportportal (è www.festo.com).
Fig. 2
Bestimmungsgemäß dient der Servomotor EMMS-AS zum Antrieb von Positionier
systemen. Die Haltebremse des EMMS-AS-…-RSB/RMB/RRB ist nicht zum Ab
bremsen des Motors geeignet.
2 Transport und Lagerung
Sorgen Sie für eine Lagerung wie folgt:
– kurze Lagerzeiten
– kühl, trocken, UV- korrosionsgeschützt (è Technische Daten)
3 Voraussetzungen für den Produkteinsatz
Hinweis
Durch unsachgemäße Handhabung entstehen Fehlfunktionen.
Stellen Sie sicher, dass die Vorgaben dieses Kapitels stets eingehalten
werden.
Vergleichen Sie die Grenzwerte in dieser Bedienungsanleitung mit Ihrem aktu
ellen Einsatzfall (z. B. Kräfte, Momente, Massen, Geschwindigkeiten, Tempera
turen). Ein gewaltsames Verdrehen der Motorwelle reduziert die Funktion einer
optional integrierten Haltebremse.
Sorgen Sie dafür, dass die Vorschriften für Ihren Einsatzort eingehalten werden,
z. B. von Berufsgenossenschaft oder nationalen Instituten.
Verwenden Sie den EMMS-AS im Originalzustand ohne jegliche eigenmächtige
Veränderung.
Berücksichtigen Sie die Umweltbedingungen vor Ort (è Technische Daten).
4 Einbau
Warnung
Offene Kabelenden am drehenden Motor führen unter Umständen lebensgefähr
liche Hochspannung.
1. Lassen Sie den Motor zunächst von der anzutreibenden Mechanik entkoppelt.
2. Stellen Sie sicher, dass der Controller spannungsfrei ist.
Die Wegnahme des Freigabesignals des Controllers reicht nicht aus.
3. Verkabeln Sie den EMMS-AS mit dem Controller vollständig gemäß der nach
folgenden Tabellen. Ausreichend große Leitungsquerschnitte sowie Schirmung
der Motor-/Encoder-/Resolverleitung mit beidseitigem Massekontakt bieten
Ihnen die vorkonfektionierten Leitungen von Festo (è Zubehör).
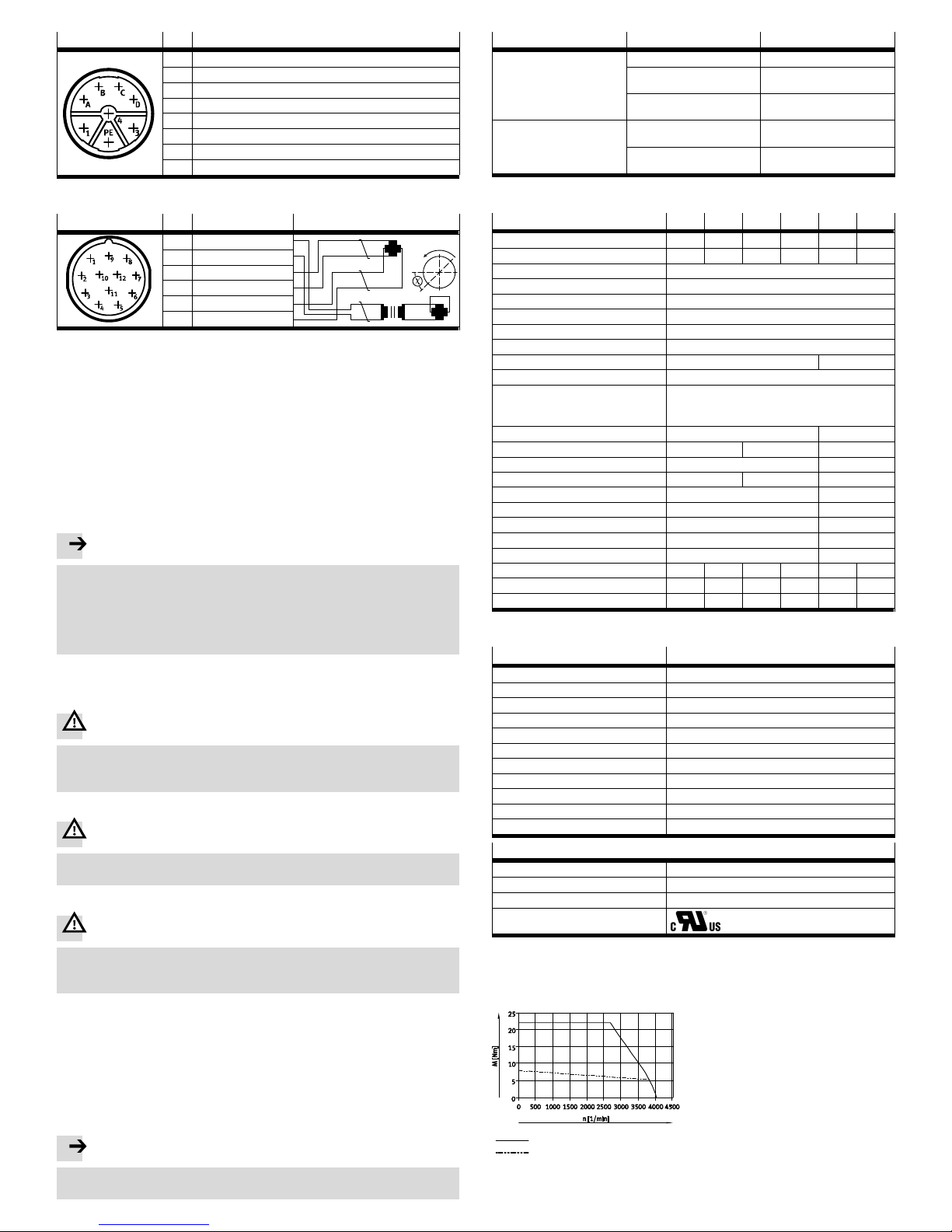
4.1 Motor mit Encoder
Leistungstecker PIN 1 Motor, Haltebremse, Temperatursensor
1 Phase U
PE Schutzerde
3 Phase W
4 Phase V
A Temperatursensor MT– (PTC)
B
Temperatursensor MT+ (PTC)
C Haltebremse BR+
1)
D Haltebremse BR–
1)
1) Nur bei Motoren mit Haltebremse EMMS-AS-…-RSB/RMB
Fig. 3
Signalstecker PIN 2 Encoder
1 0 V
2 UP
3 DATA
4 DATA/
5 0 V
6 CLOCK/
7 CLOCK
8
UP
Fig. 4
Page 2
4.2 Motor mit Resolver
Leistungstecker PIN 9 Motor, Haltebremse, Temperatursensor
1 Phase U
PE Schutzerde
3 Phase W
4 Phase V
A Temperatursensor MT– (PTC)
B
Temperatursensor MT+ (PTC)
C Haltebremse BR+
1)
D Haltebremse BR–
1)
1) Nur bei Motoren mit Haltebremse EMMS-AS-…-RRB
Fig. 5
Signalstecker PIN aJ Resolver Anschlussbild
1 R1 Erregersignal +
2 R2 Erregersignal –
3 S1 Cosinussignal +
4 S3 Cosinussignal –
5 S2 Sinussignal +
6
S4 Sinussignal –
Fig. 6
4.3 Mechanischer Einbau
1. Reinigen Sie die Welle des Motors 4.
Nur auf trockenen und fettfreien Wellenzapfen greift die Kupplung rutschfrei.
2. Schieben Sie den Läufer bzw. den Ausleger der anzutreibenden Mechanik in eine
sichere Lage.
3. Verbinden Sie den Motor an den Bohrungen 3 am Motorflansch 5 mit der
anzutreibenden Mechanik. Vorkonfektionierte Motoranbausätze für Linearan
triebe finden Sie im Zubehör von Festo (è Zubehör).
4. Drehen Sie die Befestigungsschrauben fest (è Anleitungen zum Antrieb und
Motoranbausatz). Achten Sie dabei darauf, dass keine axiale Kraft auf die Welle
des Motors ausgeübt wird.
5 Inbetriebnahme
Hinweis
Der Motor kann sich beim Lösen der Haltebremse unerwartet in Bewegung
setzen.
Stellen Sie sicher, dass die Motorwicklungen vor dem Lösen der Haltebremse
unbestromt sind.
Bestromen Sie erst jetzt die Haltebremse. Dadurch lässt sich der Motor frei dre
hen. Je nach Gerätetyp bestromt der Controller die Haltebremse automatisch.
Vollziehen Sie die Inbetriebnahme des Motors in Verbindung mit dem Controller
gemäß der Beschreibung des Controllers.
6 Bedienung und Betrieb
Warnung
Heiße Gehäuseteile verursachen möglicherweise Verbrennungen.
Stellen Sie sicher, dass Personen und Fremdgegenstände nicht in die un
mittelbare Nähe des Motors gelangen können.
7 Wartung und Pflege
Warnung
Staubschichten können Feuer fangen.
Reinigen Sie das Motorgehäuse regelmäßig.
8 Ausbau und Reparatur
Warnung
Herunterfallende Lasten verletzen möglicherweise Personen.
Stellen Sie sicher, dass die Nutzlast der anzutreibenden Mechanik in einer
sicheren Position steht (z. B. bei senkrechtem Einbau in der unteren Endlage).
Entfernen Sie den EMMS-AS erst dann von der Mechanik.
Bei Reparaturbedarf:
Schicken Sie den Motor zu Festo ein.
Eine Reparatur bei Festo berücksichtigt die Einhaltung der Sicherheitsstandards.
Vollziehen Sie den Anbau wie folgt:
1. Schieben Sie den Läufer bzw. den Ausleger der anzutreibenden Mechanik in eine
sichere Lage.
2. Montieren Sie den EMMS-AS wie im Kapitel Einbau beschrieben.
9 Zubehör
Hinweis
Wählen Sie bitte das entsprechende Zubehör aus unserem Katalog
(è www.festo.com/catalogue).
10 Störungsbeseitigung
Störung Mögliche Ursache Abhilfe
Motorwelle dreht nicht Zu hohe Last Motorlast reduzieren
Controller ist noch nicht frei
gegeben
Controllersignal prüfen
Haltebremse aktiv (nur bei
EMMS-AS-…-RSB /RMB/RRB)
Haltebremse lösen
Motorwelle dreht in falscher
Richtung oder vibriert
Verkabelungsfehler Verkabelung prüfen und korri
gieren
Falsche Reglerparameter Reglerparameter prüfen und
korrigieren
Fig. 7
11 Technische Daten
Allgemeine Motordaten RS RSB RM RMB RR RRB
Abtriebsträgheitsmoment [kgcm2] 4,729 5,285 4,729 5,285 4,700 5,240
Produktgewicht [kg] 6,90 7,50 6,90 7,50 7,14 7,74
Wellenbelastung radial [N] 570
Wellenbelastung axial [N] 150
Isolationsklasse nach EN 60034-1 F
Bemessungsklasse nach EN 60034-1 S1
Entspricht Norm IEC 60034
Schutzar t (Motorwelle) IP54 (IP65 bei E MMS-AS-…-S1)
Umgebungstemperatur [°C] –10 … +40 –40 … +40
Max. rel. Luftfeuchtigkeit [%] 90 (nicht kondensierend)
CE-Zeichen (siehe Konformi
tätserklärung)
1)
nach EU-EMV-Richtlinie
nach EU-Niederspannungs-Richtlinie
Max. Leitungslänge [m] 30
Betriebsspannung Encoder [V DC] 5 ±5 % -
Stromaufnahme Encoder [mA] 160 190 -
Positionswer te/U Encoder (18 Bit) 262144 -
Umdrehungen Multiturn-Encoder (12 Bit) - 4096 -
Eingangsspannung Resolver [V] - 4,0
Eingangsstrom Resolver [mA] - 20
Transformationsverhältnis Resolver - 0,5:1
Polzahl Resolver - 2
Trägerfrequenz Resolver [kHz] - 3,4 … 8,0
Spannung Bremse (+6 … –10 %) [V ] - 24 - 24 - 24
Leistung Bremse [W] - 18 - 18 - 18
Haltemoment Bremse [Nm] - 9 - 9 - 9
1) Das Gerät ist für den Einsatz im Industriebereich vorgesehen.
Im Wohnbereich müssen evtl. Maßnahmen zur Funkentstörung getroffen werden.
Spezifische Motordaten HS
Nennspannung [V DC] 565
Nennstrom [A] 3,40
Nennmoment [Nm] 5,63
Nenndrehzahl [1/min] 3400
Nennleistung [W ] 2000
Spitzenstrom [A] 15,0
Spitzendrehmoment [Nm] 22,1
Max. Drehzahl [1/min] 4030
Motorkonstante [Nm/A] 1,652
Wicklungswiderstand (25 °C) [W] 3,25
Wicklungsinduktivität (1 kHz) [mH] 12,3
UL Zertifizierungsinformationen
Produktkategorie-Code PRHZ2 (USA) oder PRHZ8 (Canada)
Zertifikatnummer E342973
Berücksichtigte Standards UL 1004, C22.2 No. 100-92
UL Prüfzeichen
Fig. 8
12 Kennlinien
Motortypische Kennlinien bei Nennspannung und idealisiertem Controller.
Nennspannung 565 V
HS Mmax
HS Mnenn
Fig. 9
Page 3

Servo motor
EMMS-AS-100-M…
Festo AG & Co. KG
Postfach
73726 Esslingen
+49 711 347-0
www.festo.com
Operating instructions 8041671
1411e
[8041672]
Original: de
EMMS-AS-100-M… English............................................
Note
Installation and commissioning may only be performed in accordance with these
instructions by technicians with appropriate qualifications.
Additional measures are necessary if used in safety relevant applications, e.g. in
Europe the standards listed under the EC machinery directive must be observed.
Without additional measures in accordance with statutory minimum require
ments, the product is not suitable for use in safety-related sections of control
systems.
Please note that the configuration of the EMMS-AS can be determined based
on the rating plate. Depending on the order, this motor contains a holding
brake (EMMS-…-RSB/RMB/RRB) and either an encoder (EMMS-…-RS…/RM…)
or a resolver (EMMS-…-RR…).
Electrostatic discharges onto the motor of more than 3.2 kV can sporadically
result in malfunctions of the motor.
Control sections and connections
Motor with encoder Motor with resolver
1
2
3
4
5
7
6
8
9
aJ
1 Plug for connecting cable:
– Motor
– Holding brake (only for RSB/
RMB)
– Temperature sensor
2 Plug for connecting cable:
– Encoder
3 Holes for mounting
4 Shaft
5 Motor flange
6 Note: Mechanical stops are not
permitted
7 Warning - hot surface!
8 Warning - dangerous electric
voltage
9 Plug for connecting cable:
– Motor
– Holding brake (only for RRB)
– Temperature sensor
aJ Plug for connecting cable:
– Resolver
Fig. 1
1 Function and application
The EMMS-AS is a permanently excited, electrodynamic, brushless servo motor.
The EMMS-AS is factory-fitted with an encoder or a resolver depending on the
order code.
The encoder supplies motor data, speed and position signals to a higher-order
controller in the form of digital signals.
The resolver supplies an analogue signal to a higher-order controller; this signal
allows the controller to ascertain speed and position information.
The motor must always be operated within its permitted characteristic curves.
The EMMS-AS is available with the following options:
EMMS-AS-… Option
…-RS/RSB Single-turn encoder for position monitoring
…-RM/RMB Multi-turn encoder for position monitoring
…-RR/RRB Resolver for position monitoring
…-RSB/RMB/RRB Holding brake
…-S1 Protection class IP65 (rotary shaft seal)
1)
EMGA (è Accessories) Gear units
1) Radial shaft seals are contacting seals and are generally subject to wear. For more detailed information
please visit the Festo Support Portal (è www.festo.com).
Fig. 2
Servo motor EMMS-AS has been designed for driving positioning systems. The holding
brake of the EMMS-AS-…-RSB/RMB/RRB is not suitable for braking the motor.
2 Transport and storage
Ensure storage conditions as follows:
– Storage times should be kept to a minimum
– cool, dry, UV and corrosion resistant (è Technical data)
3 Requirements for product use
Note
Improper handling can result in malfunctions.
Make sure that the specifications contained in this chapter are adhered to at
all times.
Compare the maximum values specified in these operating instructions with
your actual application (e.g. forces, torques, masses, speeds, temperatures).
The use of force to move the motor shaft will reduce the functionality of an op
tional integrated holding brake.
Ensure that all applicable safety regulations are adhered to, e.g. from trade
associations or national authorities.
Use the EMMS-AS in its original state. Unauthorized product modification is not
permitted.
Take into account the prevailing ambient conditions at the location
(è Technical data).
4 Installation
Warning
Open cable ends on the rotating motor can, under certain circumstances, lead to
dangerous high voltages.
1. First leave the motor uncoupled from the driven mechanical component.
2. Make sure that the controller is switched off.
Cancelling the Controller Release signal is not sufficient.
3. Connect the EMMS-AS completely to the controller as shown in the following
tables. Pre-assembled cables from Festo (è Accessories) offer sufficiently large
cable cross-sections as well as screening of the motor/encoder/resolver cable
with an earth contact on both sides.
4.1 Motor with encoder
Power plug Pin 1 Motor, holding brake, temperature sensor
1 Phase U
PE Protective earth
3 Phase W
4 Phase V
A Temperature sensor MT– (PTC)
B
Temperature sensor MT+ (PTC)
C Holding brake BR+
1)
D Holding brake BR–
1)
1) Only for motors with holding brake EMMS-AS-…-RSB/RMB
Fig. 3
Signal plug Pin 2 Encoder
1 0 V
2 UP
3 DATA
4 DATA/
5 0 V
6 CLOCK/
7 CLOCK
8
UP
Fig. 4
Page 4

4.2 Motor with resolver
Power plug Pin 9 Motor, holding brake, temperature sensor
1 Phase U
PE Protective earth
3 Phase W
4 Phase V
A Temperature sensor MT– (PTC)
B
Temperature sensor MT+ (PTC)
C Holding brake BR+
1)
D Holding brake BR–
1)
1) Only for motors with holding brake EMMS-AS-…-RRB
Fig. 5
Signal plug Pin aJ Resolver Connection pattern
1 R1 exciter signal +
2 R2 exciter signal –
3 S1 cosine signal +
4 S3 cosine signal –
5 S2 sine signal +
6
S4 sine signal –
Fig. 6
4.3 Mechanical installation
1. Clean the shaft of the motor 4.
The coupling will only grip without slipping on a shaft pin which is dry and free of
grease.
2. Push the slide or the cantilever of the driven mechanical components into a safe
position.
3. Connect the motor to the driven mechanical component by using the holes 3 on
the motor flange 5. Pre-assembled motor kits for linear drives can be found in
Festo's range of accessories (è Accessories).
4. Tighten the mounting screws (è Instructions on drive and motor kits). When
doing this make sure that no axial force is exerted on the shaft of the motor.
5 Commissioning
Note
The motor can unexpectedly be started if the brake is released.
Make sure that the motor windings are not energized before the brake is re
leased.
Apply current first to the holding brake. This allows the motor to rotate freely.
Depending on the type of device, the controller will energise the holding brake
automatically.
Complete the commissioning of the motor in conjunction with the controller in
accordance with the controller manual.
6 Operation
Warning
Hot parts of the housing can cause burning.
Make sure that people and objects cannot come into direct contact with the
motor.
7 Maintenance and care
Warning
Layers of dust can catch fire.
Clean the motor housing regularly.
8 Disassembly and repair
Warning
Masses which suddenly slide down may cause injury to people.
Make sure that the effective load of the driven mechanical component is in a safe
position (e.g. in the case of a vertical installation: in the lower end position).
You can now remove the EMMS-AS from the mechanical component.
If repairs are required:
return the motor to Festo.
Repairs by Festo will maintain the safety standards.
Complete the fitting as follows:
1. Push the slide or the cantilever of the driven mechanical components into a safe
position.
2. Mount the EMMS-AS as described in the installation chapter.
9 Accessories
Note
Please select the appropriate accessories from our catalogue
(è www.festo.com/catalogue).
10 Troubleshooting
Malfunction Possible cause Remedy
Motor shaft does not turn Load too high Reduce motor load
Controller has not yet been en
abled
Check controller signal
Holding brake active (only with
EMMS-AS-…-RSB /RMB/RRB)
Release holding brake
Motor shaft rotates in the
wrong direction or vibrates
Cabling fault Check and correct the cabling
Incorrect controller parameters Check and correct controller
parameters
Fig. 7
11 Technical data
General motor data
RS RSB RM RMB RR RRB
Output mass moment of iner tia [kgcm2] 4.729 5.285 4.729 5.285 4.70 5.24
Product weight [kg] 6.90 7.50 6.90 7.50 7.14 7.74
Radial shaft load [N] 570
Axial shaft load [N] 150
Insulation class according to EN 60034-1 F
Rating class according to EN 60034-1 S1
Conforms to IEC 60034
Protection class (motor shaft) IP54 (IP65 for EMMS-AS-…-S1)
Ambient temperature [°C] –10 … +40 –40 … +40
Max. rel. air humidity [%] 90 (non-condensing)
CE mark (see declaration of
conformity)
1)
in accordance with EU EMC Directive
in accordance with EU Low Voltage Directive
Max. cable length [m] 30
Operating voltage of encoder [V DC] 5 ±5 % -
Encoder current consumption [mA] 160 190 -
Position values/U encoder (18 Bit) 262144 -
Multi-turn encoder revolutions (12 Bit) - 4096 -
Resolver input voltage [V ] - 4.0
Resolver input current [mA] - 20
Resolver transformation ratio - 0.5:1
Number of poles of resolver - 2
Resolver carrier frequency [kHz] - 3.4 … 8.0
Brake voltage (+6 … –10 %) [V] - 24 - 24 - 24
Brake power [W] - 18 - 18 - 18
Brake holding torque [Nm] - 9 - 9 - 9
1) The device is intended for use in an industrial environment.
In residential areas, measures for radio interference suppression may have to be taken.
Specific motor data HS
Nominal voltage [V DC] 565
Nominal current [A] 3.40
Rated torque [Nm] 5.63
Nominal speed [rpm] 3400
Rated output [W] 2000
Peak current [A] 15.0
Peak torque [Nm] 22.1
Max. speed [rpm] 4030
Motor constant [Nm/A] 1.652
Winding resistance (25 °C) [W] 3.25
Winding inductance (1 kHz) [mH] 12.3
UL certification information
Product category code PRHZ2 (USA) or PRHZ8 (Canada)
Certificate number E342973
Standards taken into account UL 1004, C22.2 No. 100-92
UL test symbol
Fig. 8
12 Characteristic curves
Typical motor characteristics with nominal voltage and idealised controller.
Nominal voltage 565 V
HS Mmax
HS Mrated
Fig. 9
 Loading...
Loading...