

Page 1

4 Megapixel 30/60 fps Area Scan Cameras
3-Jun-11
03-032-20044-03
www.teledynedalsa.com
4M30 and 4M60
Falcon
Monochrome and Color Camera Manual
PT-41-04M60-XX-R
PT-42-04M60-XX-R
PT-21-04M30-XX-R
PT-22-04M30-XX-R
Page 2

Falcon 4M Camera Manual
2
North America
605 McMurray Rd
Waterloo, ON N2V 2E9
Canada
Tel: 519 886 6000
Fax: 519 886 8023
www.teledynedalsa.com
sales.americas@teledynedalsa.com
support@teledynedalsa.com
Europe
Breslauer Str. 34
D-82194 Gröbenzell (Munich)
Germany
Tel: +49 - 8142 – 46770
Fax: +49 - 8142 – 467746
www.teledynedalsa.com
sales.europe@teledynedalsa.com
support@teledynedalsa.com
Asia Pacific
Ikebukuro East 13F
3-4-3 Higashi-Ikebukuro
Toshima-ku, Tokyo 170-0013
Japan
Tel: 81 3 5960 6353
Fax: 81 3 5960 6354 (fax)
www.teledynedalsa.com
sales.asia@teledynedalsa.com
support@teledynedalsa.com
© 2011 Teledyne DALSA. All information provided in this manual is believed to be
accurate and reliable. No responsibility is assumed by Teledyne DALSA for its use.
Teledyne DALSA reserves the right to make changes to this information without notice.
Reproduction of this manual in whole or in part, by any means, is prohibited without
prior permission having been obtained from Teledyne DALSA.
About Teledyne Technologies and Teledyne DALSA, Inc.
Teledyne Technologies is a leading provider of sophisticated electronic subsystems,
instrumentation and communication products, engineered systems, aerospace engines,
an d en erg y and p ow er gener ation system s. Teled yne Techn olog ies‘ op erations are
primarily located in the United States, the United Kingdom and Mexico. For more
infor m ation , visit Teled yn e Tech n olog ies‘ we bsite at www.teledyne.com.
Teledyne DALSA, a Teledyne Technologies company, is an international leader in high
performance digital imaging and semiconductors with approximately 1,000 employees
worldwide, headquartered in Waterloo, Ontario, Canada. Established in 1980, the
company designs, develops, manufactures and markets digital imaging products and
solutions, in addition to providing MEMS products and services. For more information,
visit Teled y n e DALSA‘s w ebsite at w ww .teled yn ed alsa.com.
Support
For further information not included in this manual, or for information on Teledyne
DALSA‘s extensive line of im age sen sing prod ucts, p lease contact:
Camera Link is a trademark registered by the Automated Imaging Association, as chair of a committee of
industry members includ ing Teledyne DALSA.
03-032-20044-03 Teledyne DALSA
Page 3

Falcon 4M Camera Manual
3
Contents
Introduction to the 4 Megapixel Falcon Cameras _________________________________ 5
1.1 Camera Highlights ....................................................................................................................................................... 5
1.2 Camera Performance Specifications ............................................................................................................................. 6
1.3 Cosmetic Specifications ................................................................................................................................................ 9
1.4 Image Sensor and Pixel Readout................................................................................................................................. 11
1.5 Responsivity ................................................................................................................................................................. 13
1.6 Shock and Vibration..................................................................................................................................................... 15
1.6 Shock and Vibration..................................................................................................................................................... 15
Camera Hardware Interface ________________________________________________ 17
2.1 Installation Overview ................................................................................................................................................... 17
2.2 Input/Output Connectors and LED ............................................................................................................................... 18
2.2.1 LED Status Indicator ............................................................................................................................... 18
2.2.2 Camera Link ........................................................................................................................................... 19
2.2.3 Power Connector .................................................................................................................................... 21
Software Interface: How to Control the Camera __________________________________ 23
3.1 First Power Up Camera Settings .................................................................................................................................. 26
3.2 Saving and Restoring Settings ..................................................................................................................................... 27
3.3 Camera Output Format ................................................................................................................................................ 27
3.3.1 How to Configure Camera Output .......................................................................................................... 27
3.3.2 Setting the Camera Link Mode............................................................................................................... 29
3.3.3 Setting the Camera Link Strobe Frequency ............................................................................................ 30
3.4 Setting Exposure Mode, Frame Rate and Exposure Time ............................................................................................ 30
3.4.1 Non-concurrent vs. concurrent modes of operation ................................................................................ 30
3.4.2 Setting the Exposure Mode..................................................................................................................... 32
3.4.2 Setting the Frame Rate .......................................................................................................................... 35
3.4.3 Setting the Exposure Time ..................................................................................................................... 36
3.4.4 Enabling EXSYNC Debounce Circuit ....................................................................................................... 37
3.5 Snapshot Modes ........................................................................................................................................................... 37
3.6 Setting a Vertical Window of Interest ........................................................................................................................... 42
3.7 Flat Field Correction .................................................................................................................................................... 46
3.7.1 Selecting Factory or User Coefficients .................................................................................................... 50
3.7.2 Enabling Pixel Coefficients ..................................................................................................................... 51
Teledyne DALSA 03-032-20044-03
Page 4

Falcon 4M Camera Manual
4
3.7.3 Selecting the Calibration Sample Size ................................................................................................... 51
3.7.4 Performing FPN Calibration .................................................................................................................. 52
3.7.5 Performing PRNU Calibration ............................................................................................................... 53
3.7.6 Saving, Loading and Resetting Coefficients ........................................................................................... 55
3.7.7 Returning Pixel Coefficient Information ................................................................................................ 56
3.8 Offset and Gain Adjustments ....................................................................................................................................... 57
3.9 Generating a Test Pattern............................................................................................................................................ 61
Optical and Mechanical Considerations ________________________________________ 65
4.1 Mechanical Interface .................................................................................................................................................... 65
4.2 Lens Mounts ................................................................................................................................................................. 66
4.3 Optical Interface ........................................................................................................................................................... 66
Troubleshooting ________________________________________________________ 69
5.1 Common Solutions ....................................................................................................................................................... 69
5.2 Troubleshooting Using the Serial Interface ................................................................................................................. 70
5.3 Specific Solutions ......................................................................................................................................................... 70
5.4 Product Support ........................................................................................................................................................... 72
Camera Link™ Reference, Timing, and Configuration Table _________________________ 73
Error Handling and Command List ___________________________________________ 79
B1 All Available Commands .............................................................................................................................................. 79
EMC Declaration of Conformity _____________________________________________ 85
Revision History ________________________________________________________ 87
Index _______________________________________________________________ 89
03-032-20044-03 Teledyne DALSA
Page 5
Falcon 4M Camera Manual
5
Introduction to the 4
Megapixel Falcon
Cameras
1
1.1 Camera Highlights
Features
4 mega pixels, 2352 (H) x 1728 (V) resolution, CMOS area camera
Global shutter (non-rolling) for crisp images
60 fps model or 30 fps model
Color and monochrome models
Vertical windowing for faster frame rate
7.4 µm x 7.4 µm pixel pitch
4 x 80 MHz or 2 x 80 MHz data rates
Nominal broadband responsivity of 18.4 DN/ (nJ/ cm2)
Good NIR response
8 or 10 bit selectable output
Dynamic range of 57 dB
Base or Med ium Camer a Lin k™ interface
RoHS and CE compliant
Programmability
A simple ASCII protocol controls gain, offset, frame rates, trigger mode, test pattern
output, and camera diagnostics.
The serial interface (ASCII, 9600 baud, adjustable to 19200, 57600, 115200) operates
through Camera Link.
Teledyne DALSA 03-032-20044-03
Page 6
Falcon 4M Camera Manual
6
Model Number
Description
PT-21-04M30-XX-R
4M resolution, 2 sensor taps, 30 frames per second, RoHS
compliant, monochrome.
PT-41-04M60-XX-R
4M resolution, 4 sensor taps, 60 frames per second, RoHS
compliant, monochrome.
PT-22-04M30-XX-R
4M resolution, 2 sensor taps, 30 frames per second, RoHS
compliant, color.
PT-42-04M60-XX-R
4M resolution, 4 sensor taps, 60 frames per second, RoHS
compliant, color.
Feature / Specification
Notes
Resolution
2352 (H) x 1728 (V) pixels
Pixel Fill Factor
45 %
Effective fill factor
with micro-lenses
60 %
# of Lines per Frame
1728 lines
Output Format (# of taps)
2 (4M30) or 4 (4M60)
Description
The 4 mega pixel Falcon cameras are our most advanced high-speed area array cameras.
With data rates up to 320 MHz, these cameras are capable of capturing crisp images at
incredibly fast speeds. Programmable features and diagnostics are accessible through the
Camera Link ™ MDR26 con n ector. Color and monochrome options make the Falcon 4M
camera a very versatile choice.
Applications
The 4M Falcon cameras are ideal for applications requiring high speed, superior image
quality, and high responsivity. Applications include:
PCB inspection
3D solder paste inspection
2D and 3D wafer bump inspection
Semiconductor wafer inspection
Flat panel display inspection
Solar panel inspection
Industrial metrology
Traffic management
General machine vision
Models
The Falcon 4M camera is available in the following models:
Falcon 4M Camera Models Overview
1.2 Camera Performance Specifications
Camera Performance Specifications
03-032-20044-03 Teledyne DALSA
Page 7
Falcon 4M Camera Manual
7
Bayer Filter (color only)
See Fig. 2 for RGB filter location
Optical Interface
Notes
Back Focal Distance
Sensor die to mounting
plate
6.56 mm
5
Sensor Alignment
x
y
z
z
±0.10 mm
±0.10 mm
±0.25 mm
±0.3°
Lens Mount
F-mount adapter available
Lens Mount Hole
M42 x 1
Mechanical Interface
Notes
Camera Size
94 x 94 x 48 mm
Mass
<550 g
Connectors
pow er connector
data connector
6 pin male Hirose
2 x MDR26 female
Electrical Interface
Notes
Input Voltage
+12 to +15 Volts
6
Power Dissipation
10 typ, 14 Watts max
Operating Temperature
0 to 50 °C
1
Data Output Format
8 or 10 user selectable bits
Output Data Configuration
Base or Medium Camera Link
Operating Ranges
Notes
Minimum Frame Rate
1 Hz
Maximum Frame Rate
60.4 Hz (4M60)
30.6 Hz (4M30)
4
Data Rate
80 MHz
Dynamic Range
(10 bits @ nominal gain)
682 : 1 typ.
2
Random Noise
1.5 typ, 2.0 max DN rms
Broadband Responsivity (mono)
18.4 typ DN/ (nJ/ cm2)
7
Responsivity
See Figs. 5, 7, and 8
Quantum Efficiency
See Figs. 6
DC Offset
0 DN
7
Antiblooming
>1000x saturation
FPN
0.5 typ, 1.0 max DN rms
PRNU
1.5 typ, 2.6 max DN rms
8
Integral non-linearity
<2% DN
3
Teledyne DALSA 03-032-20044-03
Page 8
Falcon 4M Camera Manual
8
Operating Ranges
Notes
Saturation Equivalent Exposure
55 typ nJ/ cm2
Noise Equivalent Exposure
80 typ pJ/ cm2
Saturation Output Amplitude
1023 DN
Test conditions unless otherwise noted:
sem 2 (exposure mode 2).
ssf 55 (55 frames per second rate).
set 2000 (2 millisecond exposure time).
sem 2 (Exposure mode 2) .
Full frame/ window.
clm 16 (4 tap, 10 bit).
sot 320 (80 MHz camera link strobe).
efd 1 (Snapshot mode 1).
snd 1 (Number of fast frame dumps = 1).
Light Source: Broadband Quartz Halogen, 3250K (3050 to 3450), with a 750 nm cutoff
filter .
Ambient test temperature 25°C.
Average output 840 DN .
Flat field correction (FFC) turned on.
Notes:
1. Measured at the front plate.
2. Based on output at 1023 DN.
3. Output over 10-90%.
4. Snapshot mode 0 allows for marginally higher frame rates.
5. Optical distance.
6. +12V consumes the least amount of power.
7. With FFC on. Responsivity is not calibrated when FCC is turned off.
8. Measured at half saturation.
03-032-20044-03 Teledyne DALSA
Page 9

Falcon 4M Camera Manual
9
Cosmetic Specification
Maximum Number of Defects
Hot pixel defects
1
Single pixel defects
100
Clusters defects
No limit (refer to the Note below)
Spot d efects
1
Column defects
0
Row defects
0
1.3 Cosmetic Specifications
Please note, for this section only, the following values are considered preliminary
information and subject to change without notice.
Monochrome Sensor Cosmetic Specifications
The following table highlights the current cosmetic specifications for the sensor used
inside the Falcon 4M60 and 4M30 cameras. The sensor has 4 megapixels (2352 x 1728),
global shuttering and is capable of 60 fps.
Sensor Cosmetic Specifications
Definition of cosmetic specifications
Hot pixel defect
Pixel whose signal, in dark, deviates by more than 400 DN (10 bits) from the average of all
the pixels.
Single pixel defect
Pixel whose signal, at nominal light (illumination at 50% of saturation), deviates by more
than ±30% from its neighboring pixels.
Cluster defect
A grouping of at most 8 pixel defects within an area of 3 x 3 pixels.
Spot defect
A grouping of 9 pixel defects within an area of 3 x 3 pixels.
Column defect
A column which has 12 pixel defects in a 1*12 kernel.
Row defect
A horizontal grouping of more than 4 pixel defects between at least 2 good pixels on both
sides, where single good pixels between 2 defective pixels are considered defective.
Test conditions
Digital gain – 1X.
Nominal light = illumination at 50 % of saturation.
Frame Rate = 60 fps (Falcon 4M60), 30 fps (Falcon 4M30)
Teledyne DALSA 03-032-20044-03
Page 10

Falcon 4M Camera Manual
10
Cosmetic Spec
Max. Deviation
from Mean
Cluster Size
Max Number of Defects
Glass defects
5 % 9 0
Cosmetic Specification
Maximum Number of Defects
Dark pixel defects (> 300 DN)
50
Dark pixel defects (> 600 DN)
1
Single pixel defects
100
Integration time = 15 ms
Ambient Temperature of 25 °C
Note: While the number of clusters is not limited by a maximum number, the total
number of defective pixels cannot exceed 100. Therefore, you could have 12 clusters of 8
in size (12 x 8 = 96), but you could not have 13 clusters of 8 in size (13 x 8 = 104).
The probability of 12 clusters of 8 is negligible and is only used as an example.
Camera Cosmetic Specification
Beyond sensor cosmetic testing, the camera is placed under additional testing to more
closely examine potential cosmetic defects due to the sensor glass.
Camera Cosmetic Specifications - Glass
Definition of blemishes
Glass defects
A group of pixels exceeding the given cluster size and the maximum deviation from the
mean. Images are taken at nominal light (illumination at 50 % of the linear range). A
cluster is defined as a grouping of pixels. A grouping of pixels refers to adjacent pixels or
pixels that touch.
In addition, the camera is examined against the following cosmetic specifications.
Camera Cosmetic Specifications – Sensor & Glass
Definition of cosmetic specifications
Dark pixel defects
Pixel whose signal, in dark, exceeds the given threshold (10 bits).
Single pixel defect
Pixel whose signal, at nominal light (illumination at 50 % of saturation), deviates by more
than ± 30 % from its neighboring pixels.
Test conditions
Digital gain – 1X.
Nominal light = illumination at 50 % of saturation.
03-032-20044-03 Teledyne DALSA
Page 11
Falcon 4M Camera Manual
11
Ro w 2
0
Tap 2
Co lum n 235
Ro w 2
49
Tap 1
Co lum n 23
Ro w 1
Co lum n 1
Tap 1
Ro w 1
Co lum n 2
Tap 2
Ro w 1
Co lum n 3
Tap 3
Ro w 1
Co lum n 235 1
Tap 3
Ro w 1
Co lum n 235 0
Tap 2
Ro w 1
Co lum n 234 9
Tap 1
Ro w 2
Co lum n 1
Tap 1
Ro w 2
Co lum n 2
Tap 2
Ro w 2
Co lum n 3
Tap 3
Ro w 2
1
Tap 3
Co lum n 235
Ro w 1 727
Co lum n 235 1
Tap 3
Ro w 1 727
Co lum n 235 0
Tap 2
Ro w 1 727
Co lum n 234 9
Tap 1
Ro w 1 727
Co lum n 3
Tap 3
Ro w 1 727
Co lum n 2
Tap 2
Ro w 1 727
Co lum n 1
Tap 1
Ro w 1 727
Co lum n 235 2
Tap 4
Ro w 2
Tap 4
Co lum n 235 2
Ro w 1
Co lum n 235 2
Tap 4
Ro w 1 728
Co lum n 1
Tap 1
Ro w 1 728
Co lum n 2
Tap 2
Ro w 1 728
Co lum n 3
Tap 3
Ro w 1 728
Co lum n 234 9
Tap 1
Ro w 1 728
Co lum n 235 0
Tap 2
Ro w 1 728
Co lum n 235 1
Tap 3
Ro w 1 728
Co lum n 235 2
Tap 4
Pixel
1
Pixel read out direction is left to right then bottom to top
Ro w 1
Co lum n 4
Tap 4
Ro w 2
Co lum n 4
Tap 4
Ro w 1 727
Co lum n 4
Tap 4
Ro w 1 728
Co lum n 4
Tap 4
Frame Rate = 60 fps (Falcon 4M60), 30 fps (Falcon 4M30).
Integration time = 15 ms.
Ambient Temperature of 25 °C.
Note: all of the above sensor and camera cosmetic specifications are w ith flat field
correction turned off (epc 0 0). There are no post flat field correction (epc 1 1) camera
cosmetic specifications.
Color Cosmetic specifications
Color camera cosmetic specifications in the dark (such as hot pixels) will be the same as
monochrome specifications. Specifications in the light are pending.
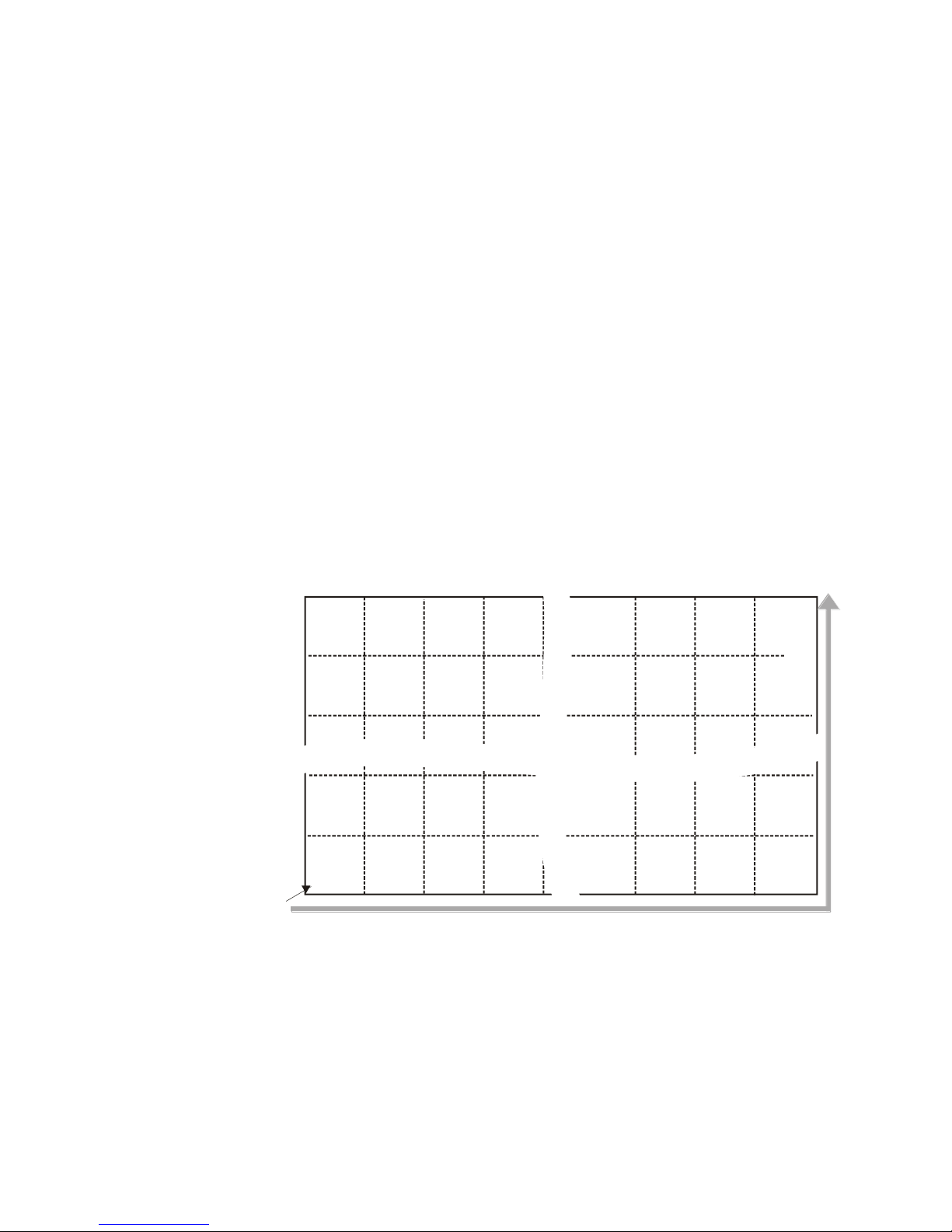
1.4 Image Sensor and Pixel Readout
The camera uses our new DCR2417M, 4 mega pixel, 2352 x 1728 CMOS sensor.
Figure 1: 4 Tap Sensor Block Diagram
Note: As viewed from the front of the camera without lens. The bottom of the camera has
a ¼-20 tripod mount.
Teledyne DALSA 03-032-20044-03
Page 12
Falcon 4M Camera Manual
12
Row 2
0
Tap 2
Column 235
Row 2
49
Tap 1
Column 23
Row 1
Column 1
Tap 1
Row 1
Column 2
Tap 2
Row 1
Column 3
Tap 3
Row 1
Column 2351
Tap 3
Row 1
Column 2350
Tap 2
Row 1
Column 2349
Tap 1
Row 2
Column 1
Tap 1
Row 2
Column 2
Tap 2
Row 2
Column 3
Tap 3
Row 2
1
Tap 3
Column 235
Row 1727
Column 2351
Tap 3
Row 1727
Column 2350
Tap 2
Row 1727
Column 2349
Tap 1
Row 1727
Column 3
Tap 3
Row 1727
Column 2
Tap 2
Row 1727
Column 1
Tap 1
Row 1727
Column 2352
Tap 4
Row 2
Tap 4
Column 2352
Row 1
Column 2352
Tap 4
Row 1728
Column 1
Tap 1
Row 1728
Column 2
Tap 2
Row 1728
Column 3
Tap 3
Row 1728
Column 2349
Tap 1
Row 1728
Column 2350
Tap 2
Row 1728
Column 2351
Tap 3
Row 1728
Column 2352
Tap 4
Pixel
1
Pixel read out direction is left to right then bottom to top
Row 1
Column 4
Tap 4
Row 2
Column 4
Tap 4
Row 1727
Column 4
Tap 4
Row 1728
Column 4
Tap 4
R
B
GB
R
B
GR
R
B
R
B
GRGR
GR GR
B B
R R
GR GR
B B
R R
GR
GB GB GB
GB GB GB
GB
GB: Green-Blue
B: Blue
R: Red
GR: Green-Red
Ro w 1
Co lum n 1
Tap 1
Ro w 1
Co lum n 2
Tap 2
Ro w 1
Co lum n 3
Tap 3
Pixel
1
Ro w 1
Co lum n 4
Tap 4
Row 1
Column 1
Tap 1
Row 1
Column 2
Tap 2
Row 1
Column 3
Tap 1
Pixel
1
Row 1
Column 4
Tap 2
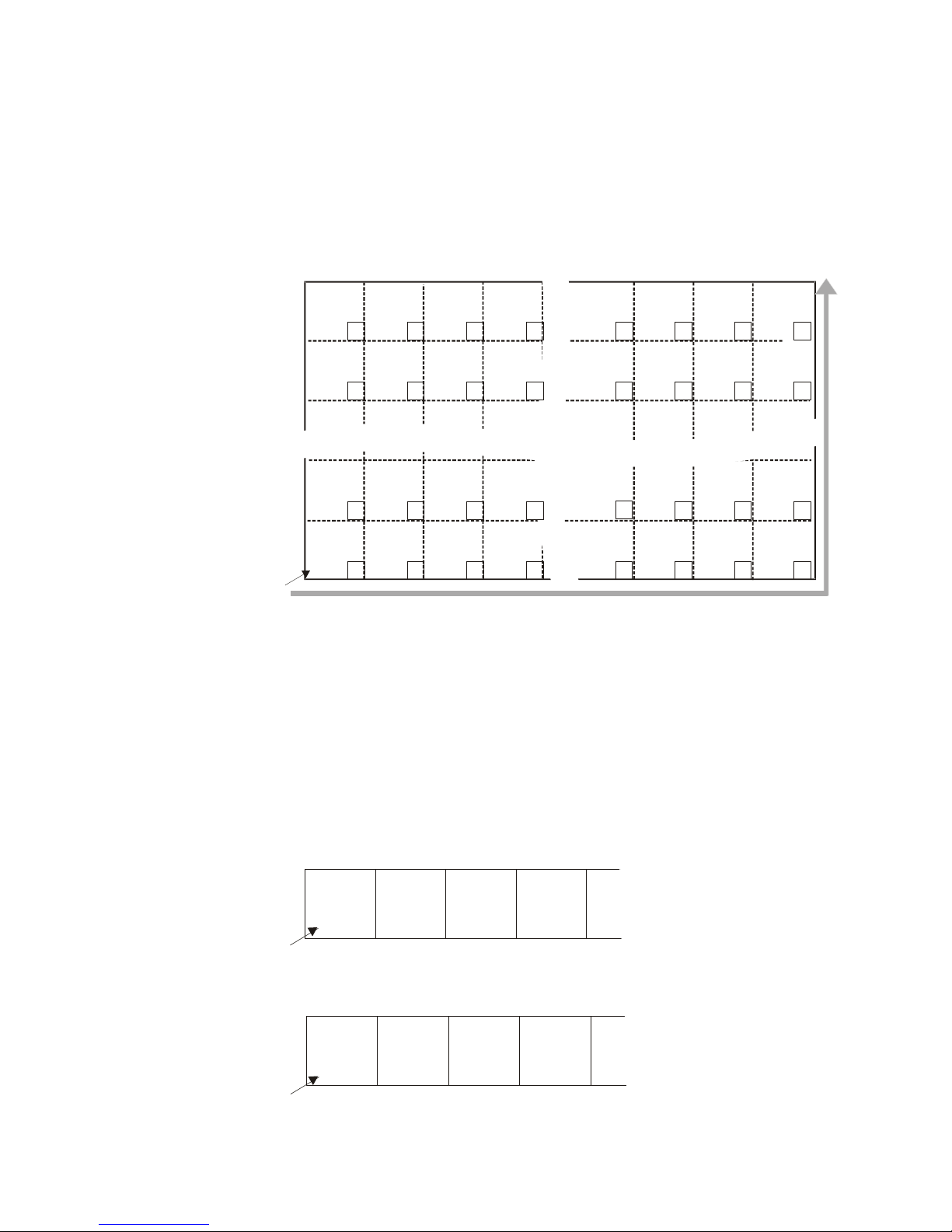
The color camera model has a Bayer filter applied to the CMOS sensor to allow for color
separation. Each individual pixel is covered by either a red, green, or blue filter as shown
in the figure below. The camera outputs raw color data--no color interpolation is
performed. Full RGB images can be obtained by performing color interpolation on the
frame grabber or host PC.
Figure 2: Color Sensor Block Diagram
Camera Readout and Coordinates
The camera readout begins with pixel 1 and reads out successive pixels from left to right
until the entire row is completed. This process is repeated with each successive row in the
frame. Pixel coordinates are expressed as column and r ow s, w h ere the fir st p ixel‘s
coordinates are 1, 1 and t h e last pixel‘s coord inat es are 2352, 1728.
03-032-20044-03 Teledyne DALSA
Figure 3: 4M60 Pixel Readout Detail
Figure 4: 4M30 Pixel Readout Detail
Page 13
Falcon 4M Camera Manual
13
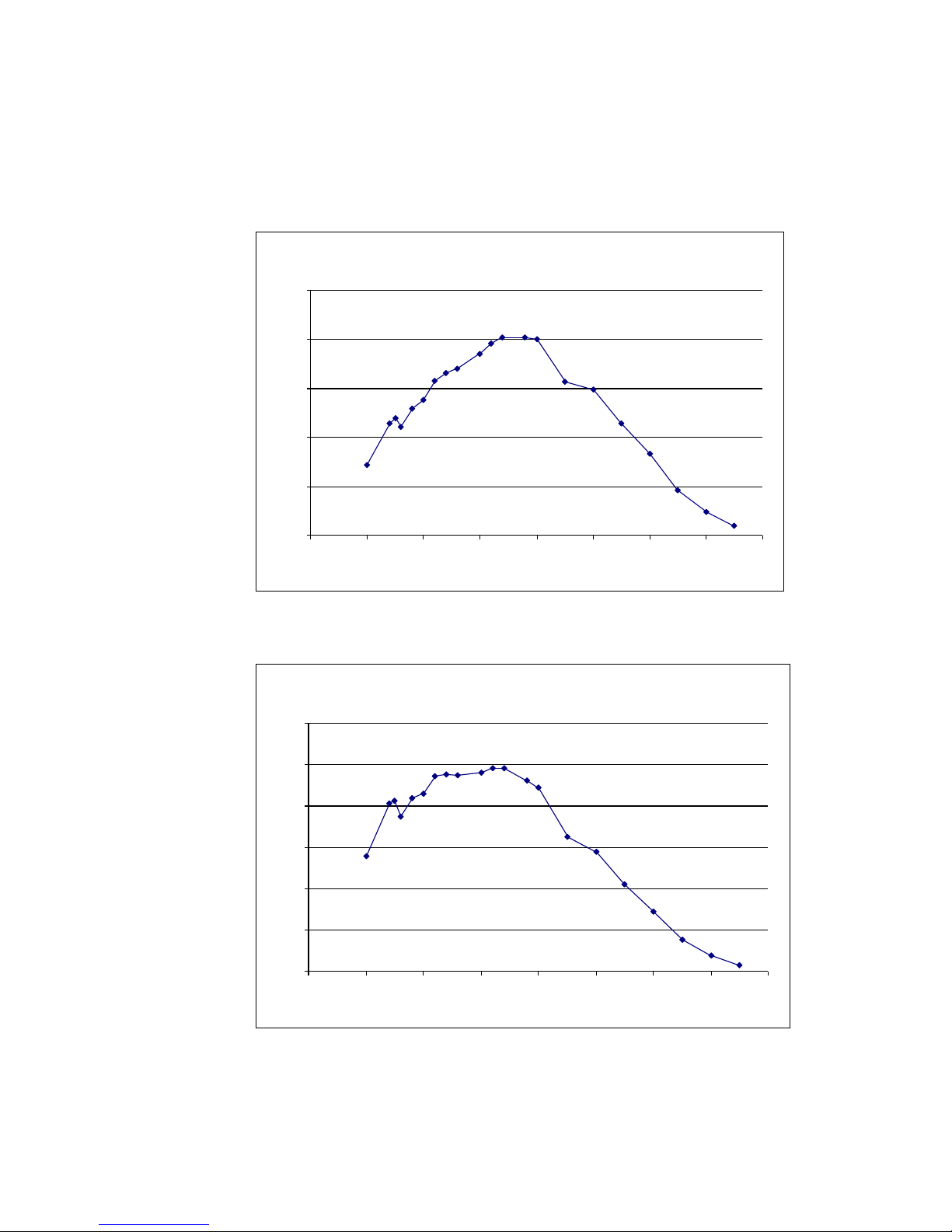
Spectral Responsivity at Coarse Gain = 0 dB, Fine Gain = 45
0
5
10
15
20
25
300 400 500 600 700 800 900 1000 1100
Wavelength (nm)
Responsivity (DN/(nJ/cm
2
))
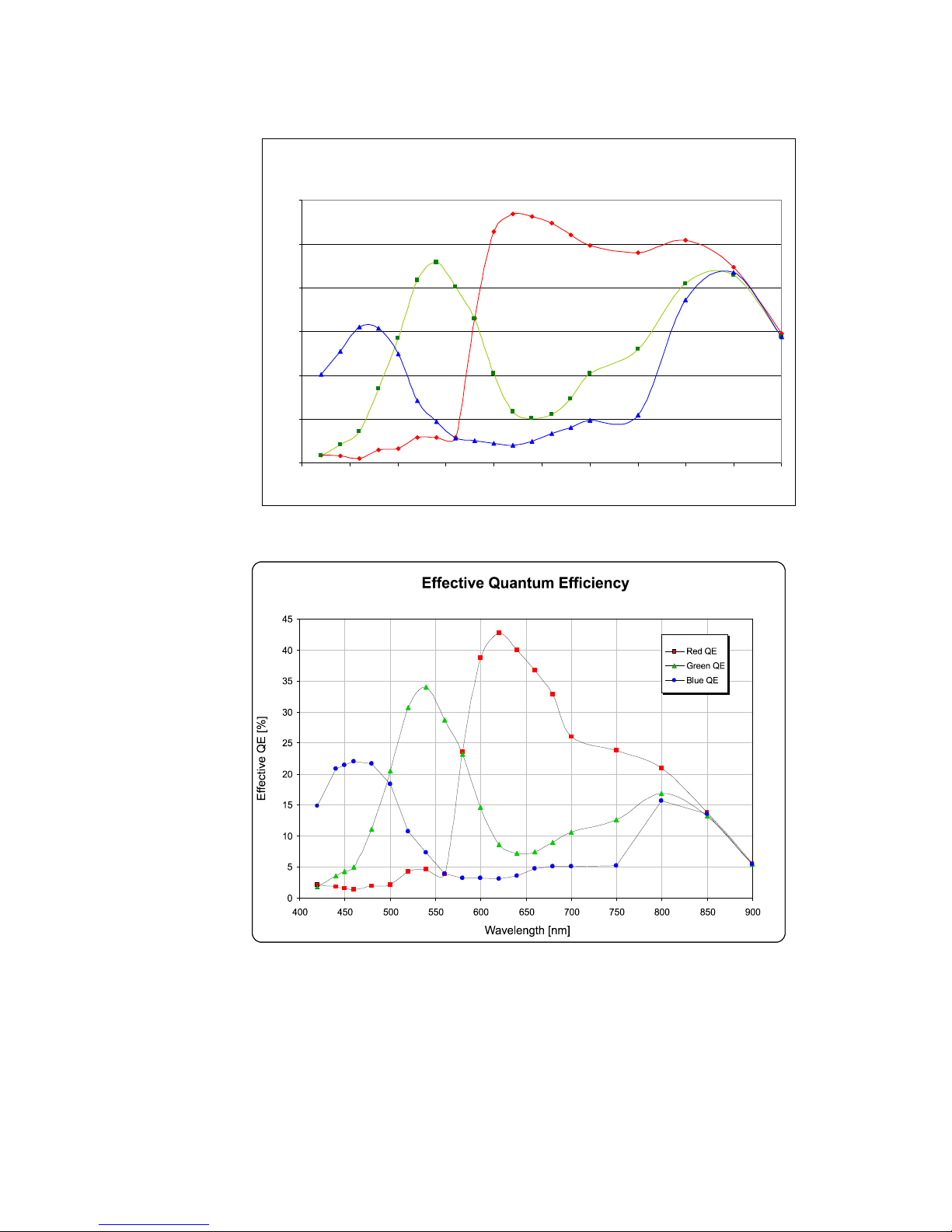
Effective Quantum Efficiency
0
10
20
30
40
50
60
300 400 500 600 700 800 900 1000 1100
Wavelength (nm)
Fill Factor x Quantum Efficiency (%)
1.5 Responsivity
Figure 5: Spectral Responsivity (Monochrome Sensor)
Note: Responsivity is calibrated w ith fcc on .
Figure 6: Effective Quantum Efficiency (Monochrome Sensor)
Teledyne DALSA 03-032-20044-03
Page 14
Falcon 4M Camera Manual
14
Avg spectral responsivity, 3 colour sensors
B=blue, R=red, G=green
0
2
4
6
8
10
12
400 450 500 550 600 650 700 750 800 850 900
Wavelength (nm)
Responsivity DN/(nJ/cm2)
Figure 7: Spectral Responsivity
Figure 8: Effective Quantum Efficiency
Note: We recommend you use of an SP700 IR-filter to remove unwanted IR signal that
could affect color reproduction.
03-032-20044-03 Teledyne DALSA
Page 15
Falcon 4M Camera Manual
15
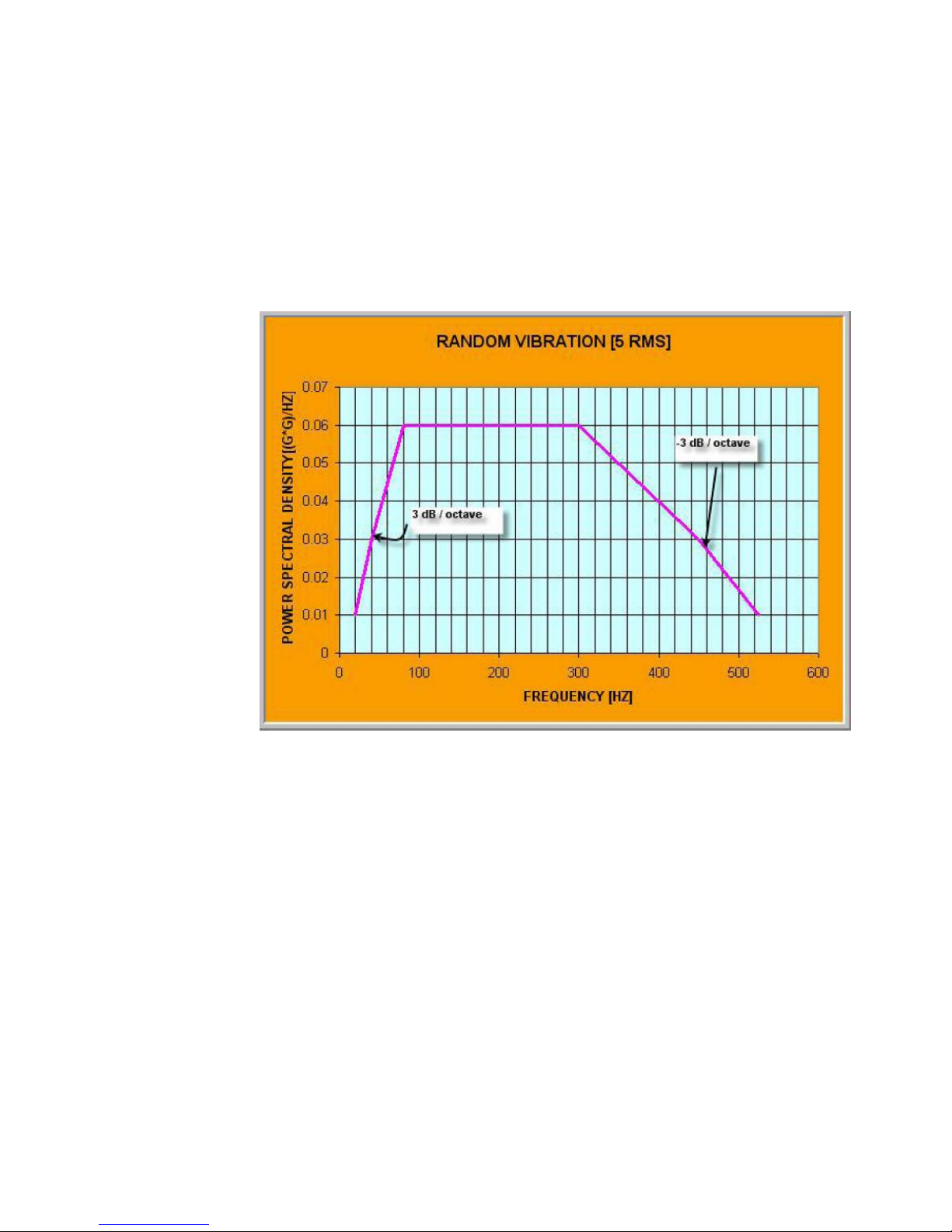
Random vibration per MIL-STD-810F at 25 G2/HZ [Power Spectral Density] or 5 RMS
Shock testing 75 G peak acceleration per MIL-STD-810F
Ambient Temperature
MTBF
40 °C
>65,000 hour
50 °C
>40,000 hours
1.6 Shock and Vibration
The Falcon 4M60 and 4M30 cameras are shock and vibration tested to ensure that they can
withstand the challenges and thrive in an industrial settings.
The cameras meet or exceed the following specifications:
The cameras meet the following Mean Time Before Failure (MTBF) specifications:
As shown, MTBF is highly dependant upon temperature. To improve MTBF reduce the
ambient temperatures, by using or increasing heat sinking or cooling of the camera. MTBF
is related to temperature. At lower temperatures MTBF numbers increase significantly. It
is recommended that if high MTBF numbers are demanded by your application you
include some type of cooling in your system, such as, forced air.
Teledyne DALSA 03-032-20044-03
Page 16

Falcon 4M Camera Manual
16
03-032-20044-03 Teledyne DALSA
Page 17
Falcon 4M Camera Manual
17
This installation
overview assumes you
have not installed any
system components yet.
Camera Hardware
Interface
2.1 Installation Overview
2
When setting up your camera, you should take the following steps:
1) Power down all equipment.
2) Following the manu facturer‘s instru ctions, in stall the fram e grabber (if ap plicable). Be
sure to observe all static precautions.
3) Install any necessary imaging software.
4) Before connecting power to the camera, test all power supplies.
5) Inspect all cables and connectors prior to installation. Do not use damaged cables or
connectors. The camera may be damaged as a result.
6) Connect Camera Link and power cables.
7) After connecting cables, apply power to the camera.
8) Check the diagnostic LED. If the camera is operating correctly, the LED will flash for
approximately 30 seconds and then turn solid green. See 2.2.1 LED Status Indicator
for a description of LED states.
You must also set up the other components of your system, including light sources,
camera mounts, computers, optics, encoders, and so on.
A note on Camera Link cable quality and length
The maximum allowable Camera Link cable length depends on the quality of the cable
used and the Camera Link strobe frequency. Cable quality degrades over time as the cable
is flexed. As the Camera Link strobe frequency is increased, the maximum allowable cable
length will decrease.
Imaging performance may be compromised if you use low quality cables of any length. In
general, use high quality cables in lengths less than 10 meters.
Teledyne DALSA 03-032-20044-03
Page 18
Falcon 4M Camera Manual
18
Camera Link (Base Configuration)
Camera Link (Medium Configuration)
Diagnostic LED
+12V to +15V
CONTROL
DATA 1
DATA 2
POWER
Color of Status LED
Meaning
Flashing Green
Camera initialization or executing a time consuming command
Solid Green
Camera is operational and functioning correctly
Flashing Red
Fatal Error. System voltage out of tolerance.
Solid Red
Warning. Loss of functionality (e.g. external SRAM failure)
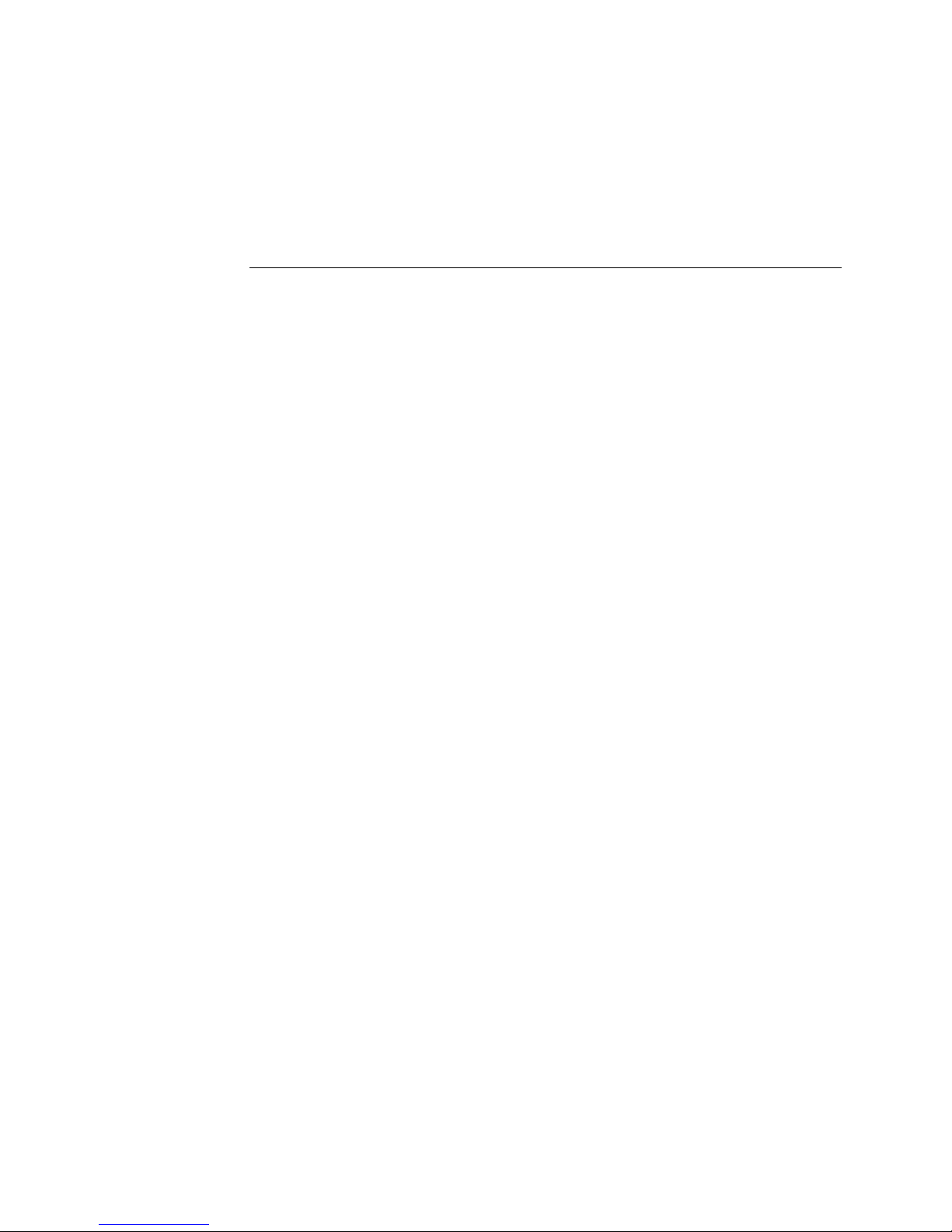
2.2 Input/Output Connectors and LED
The camera uses:
A diagnostic LED for monitoring the camera. See LED Status Indicator in section 2.2.1
LED Status Indicator for details.
Two high-density 26-pin MDR26 connectors for Camera Link control signals, data
signals, and serial communications. Refer to section 2.2.2 Camera Link
Data Connector for details.
One 6-pin Hirose connector for power. Refer to section 2.2.3 Power Connector for
details.
Figure 9: Input and Output
WARNING:
Ensure that all the correct voltages at full load are present at the camera power connector
(irrespective of cable length) according to the pinout defined in section 2.2.3 Power
Connector. A common system problem is that the voltage drop across the power cable is
large enough that the voltage at the camera does not meet the power input voltage
specifications.
2.2.1 LED Status Indicator
The camera is equipped with a red/ green LED used to display the operational status of
the camera. The table below summarizes the operating states of the camera and the
corresponding LED states.
When more than one condition is active, the LED indicates the condition with the highest
priority. Error and warning states are accompanied by corresponding messages further
describing the current camera status.
Status LED
03-032-20044-03 Teledyne DALSA
Page 19
Falcon 4M Camera Manual
19
Configuration
8 Bit Ports
Supported
Serializer
Bit Width
Number
of Chips
Number of MDR26
Connectors
Base
A, B, C
28 1 1
Medium
A, B, C, D, E, F
28 2 2
BASE
Configuration
Port Definition
Mode (set with
clm command)
Port A
Bits 0 thru 7
Port B
Bits 0 thru 7
Port C
Bits 0 thru 7
Mode 2
2 Tap 8 bit
Tap 1 LSB..Bit 7
Tap 2 LSB..Bit7
xxxxxxx
Mode 3
2 Tap 10 bit
Tap 1 LSB.. Bit 7
Tap 1 Bits 8,9
Tap 2 Bits 8,9
Tap 2 LSB..Bit 7
Medium
Configuration
Port Definition
Mode
Port A
Bits 0 thru
7
Port B
Bits 0 thru
7
Port C
Bits 0 thru
7
Port D
Bits 0
thru 7
Port E
Bits 0
thru 7
Port F
Bits 0
thru 7
Mode 15
4 Tap 8 bit
Tap 1
LSB...Bit 7
Tap 2
LSB...Bit 7
Tap 3
LSB...Bit 7
Tap 4
LSB...Bit 7
xxxxxxxx
xxxxxxxx
Mode 16
4 Tap 10 bit
Tap 1
LSB...Bit 7
Tap 1 Bits 8,9
Tap 2 Bits 8,9
Tap 2
LSB...Bit 7
Tap 4
LSB…Bit 7
Tap 3
LSB…Bit
7
Tap 3 Bit
8,9
Tap 4 Bit
8,9
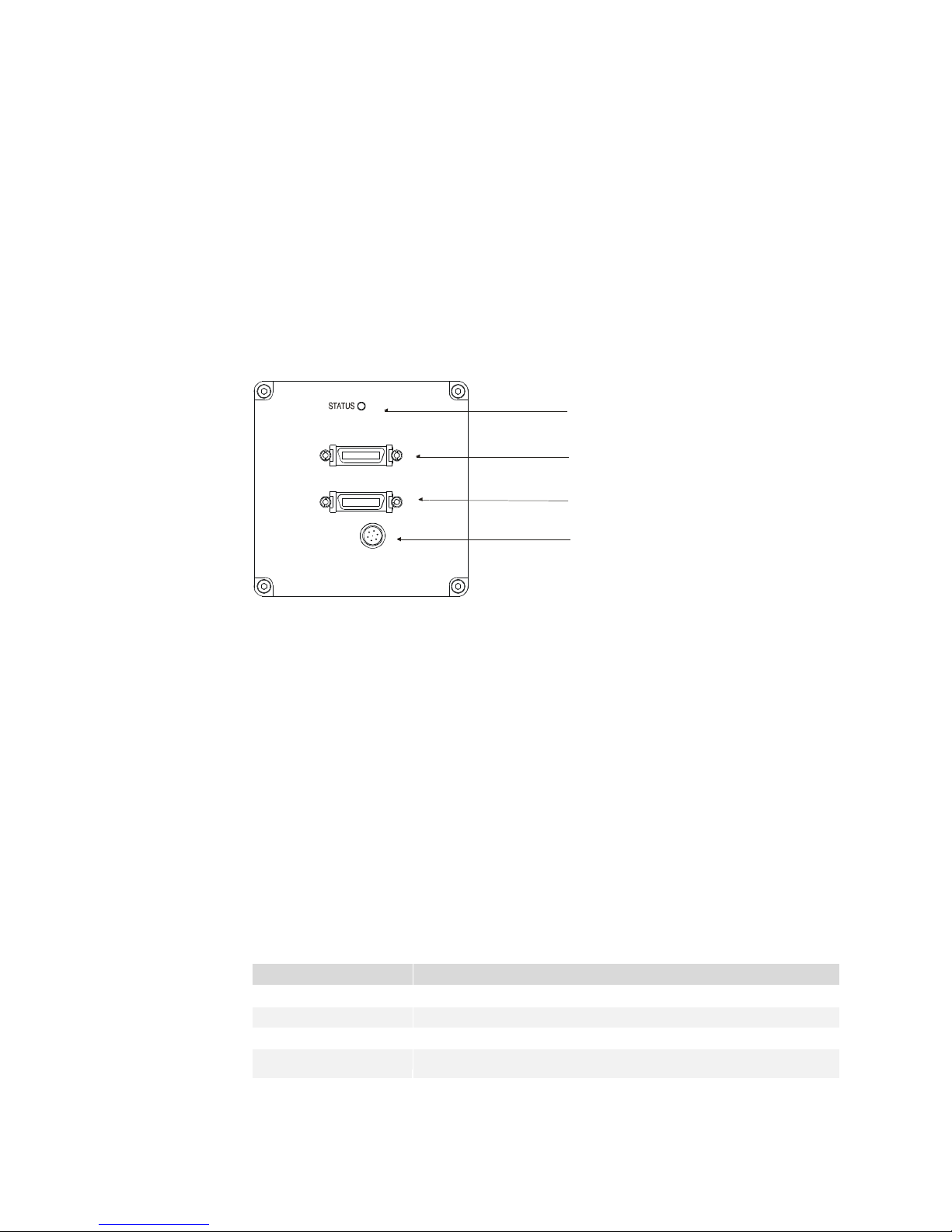
2.2.2 Camera Link
Data Connector
Figure 10: Camera Link MDR26 Connector
The Camera Link interface is implemented as either Base or Medium configuration in the
Falcon 4M cameras.
Select the camera configuration with the clm command described in the section Setting
the Camera Link Mode.
The following tables provide this cam era‘s p rin cip al Camer a Link information. See
Appendix A for the complete Camera Link configuration table, and refer to the
Knowledge Center on our Web site, here, for links to the official Camera Link documents.
Camera Link Hardware Configuration Summary
Teledyne DALSA 03-032-20044-03
Page 20

Falcon 4M Camera Manual
20
Medium Configuration
Base Configuration
Up to an additional 2 Channel Link Chips
One Channel Link Chip + Camera
Control + Serial Communication
Camera
Connector
Right Angle
Frame Grabber
Connector
Channel Link
Signal
Camera
Connector
Right Angle
Frame
Grabber
Connector
Channel
Link Signal
1 1 inner shield
1 1
inner shield
14
14
inner shield
14
14
inner shield
2
25
Y0- 2
25
X0-
15
12
Y0+ 15
12
X0+ 3 24
Y1- 3
24
X1-
16
11
Y1+ 16
11
X1+ 4 23
Y2- 4
23
X2-
17
10
Y2+ 17
10
X2+ 5 22
Yclk-
5 22
Xclk-
18 9 Yclk+
18 9 Xclk+
6
21
Y3- 6
21
X3-
19 8 Y3+ 19 8 X3+ 7 20
100 ohm
7 20
SerTC+
20 7 terminated
20 7 SerTC-
8
19
Z0- 8
19
SerTFG-
21 6 Z0+ 21 6 SerTFG+
9
18
Z1- 9
18
CC1-
22 5 Z1+ 22 5 CC1+
10
17
Z2- 10
17
CC2+
23 4 Z2+ 23 4 CC2-
11
16
Zclk-
11
16
CC3-
24 3 Zclk+
24 3 CC3+
12
15
Z3- 12
15
CC4+
25 2 Z3+ 25 2 CC4-
13
13
inner shield
13
13
inner shield
26
26
inner shield
26
26
inner shield
Signal
Configuration
CC1
EXSYNC
CC2
Reserved for future use
CC3
Reserved for future use
CC4
Window toggle
Camera Link Connector Pinout
Notes:
*Exterior Overshield is connected to the shells of the connectors on both ends.
**3M part 14X26-SZLB-XXX-0LC is a complete cable assembly, including connectors.
Unused pairs should be terminated in 100 ohms at both ends of the cable.
Inner shield is connected to signal ground inside camera
Camera Control Configuration
03-032-20044-03 Teledyne DALSA
Page 21
Falcon 4M Camera Manual
21
!
Clocking Signal
Indicates
LVAL (high)
Outputting valid line
DVAL (high)
Valid data
STROBE (rising edge)
Valid data
FVAL (high)
Outputting valid frame
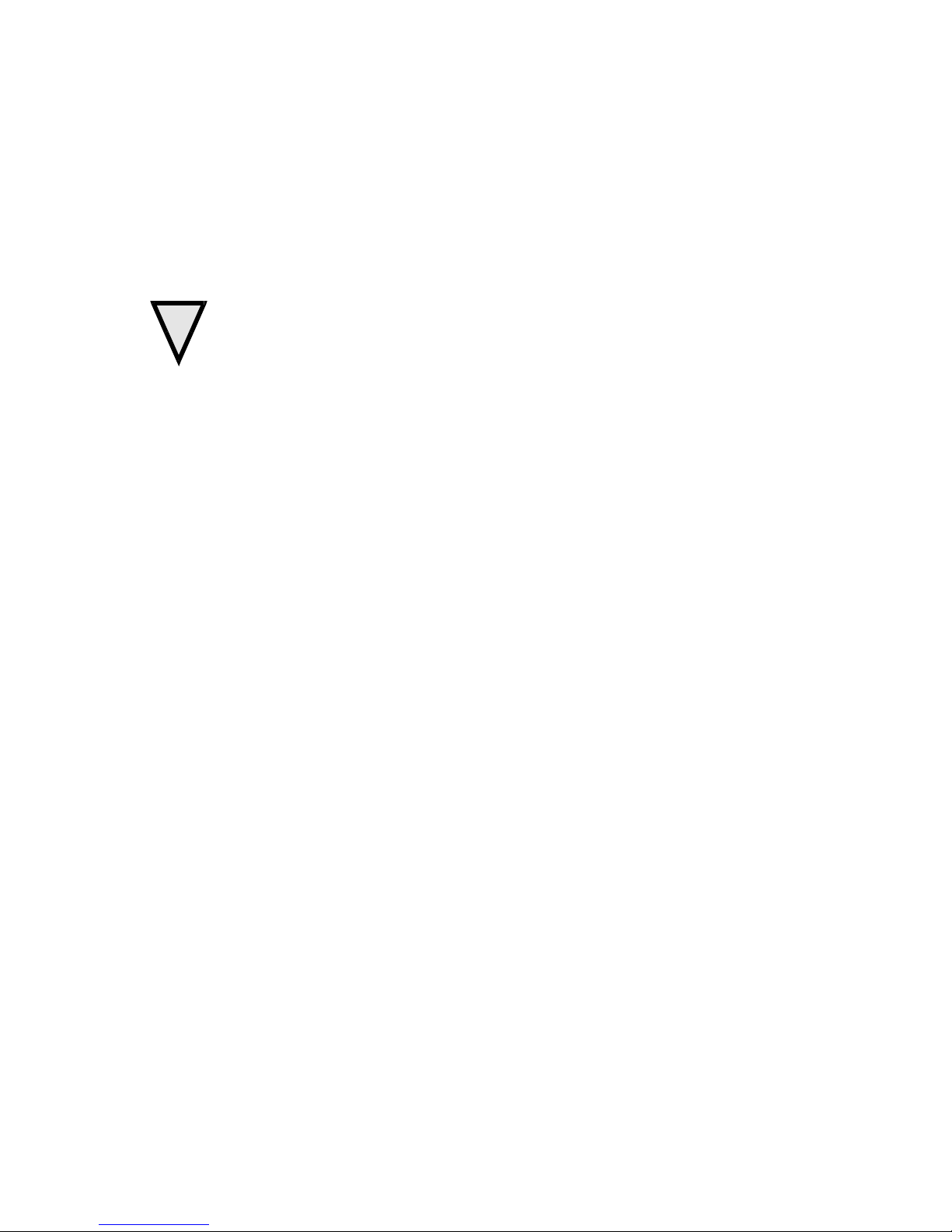
Hirose Pin Description
Pin
Description
Pin
Description
1
12 to 15V
4
GND
2
12 to 15V
5
GND
3
12 to 15V
6
GND
IMPORTANT:
Camera readout is
triggered on the falling
edge of EXSYNC.
Input Signals, Camera Link
The camera accepts control inputs through the Camera Link MDR26F connector.
The camera ships in internal sync, internal programmed integration (exposure mode 2),
and Camera Link mode 16 (4M60) or 3 (4M30).
EXSYNC
Frame rate can be programmed using the serial interface. The external control signal
EXSYNC is optional and enabled through the serial interface. This camera uses the falling
edge of EXSYNC to trigger frame readout. Section 3.3 Camera Output Format details
how to set frame times, exposure times, and camera modes.
Output Signals, Camera Link
These signals indicate when data is valid, allowing you to clock the data from the camera
to your acquisition system. These signals are part of the Camera Link configuration and
you should refer to the Camera Link Implementation Road Map, available from the
Knowledge Center on our Web site, here, for the standard location of these signals.
The camera internally digitizes to 10 bits and outputs 8 MSB or all 10 bits depending
on the ca m era‘s Ca m era Lin k operating mode.
For a Camera Link reference and timing definitions refer to Appendix A on page 73.
2.2.3 Power Connector
Figure 11: Hirose 6-pin Circular Male—Power Connector
The camera requires a single voltage input (+12 to +15V).
WARNING: When setting up the camera’s power supplies follow these guidelines:
Protect the camera with a fast-blow fuse between power supply and camera.
Power surge limit at 3 A.
12 V power supply. Nominal 0.85 A load resulting in ~ 20 A/ s current ramp rate
Power supply current limit needs to be set at > 3 A.
Teledyne DALSA 03-032-20044-03
Do not use the shield on a multi-conductor cable for ground.
Page 22
Falcon 4M Camera Manual
22
!
Keep cables as short as possible to reduce voltage drop. Long power supply leads
may falsely indicate that the power supply is within the recommended voltage range
even when the camera at the connector is actually being sup plied with much less
voltage.
Use high-quality linear supplies to minimize noise.
Use an isolated type power supply to prevent LVDS common mode range violation.
Note: Performance specifications are not guaranteed if your power supply does not meet
these requirements.
WARNING: It is extremely important that you apply the appropriate voltages to your
camera. Incorrect voltages will damage the camera. Protect the camera with a fast-blow
fuse between power supply and camera.
03-032-20044-03 Teledyne DALSA
Page 23
Falcon 4M Camera Manual
23
Software Interface: How
to Control the Camera
All camera features can be controlled through the serial interface. The camera can also be
used without the serial interface after it has been set up correctly. Functions available
include:
3
Controlling basic camera functions such as gain and sync signal source
Data readout control
Generating a test pattern for debugging
The serial interface uses a simple ASCII-based protocol and the camera does not
require any custom software.
Serial Protocol Defaults
8 data bits
1 stop bit
No parity
No flow control
9.6 Kbps
Camera does not echo characters
Command Format
When entering commands, remember that:
A carriage return <CR> ends each command.
The camera will answer each command with either <CR><LF> OK > or Error x:
Error Message >. The > is always the last character sent by the camera.
The camera accepts both upper and lower case commands.
The following parameter conventions are used in the manual:
i = integer value
f = real number
m = member of a set. Value must be entered exactly as displayed on help screen.
Teledyne DALSA 03-032-20044-03
Page 24

Falcon 4M Camera Manual
24
Purpose:
Sets the speed in bps of the serial communication port.
Syntax:
sbr m
Syntax Elements:
m
Baud rate. Available baud rates are: 9600 (Default), 19200,
57600, and 115200.
Notes:
Power-on rate is always 9600 baud.
The rc (reset camera) command will not reset the camera to
the pow er-on baud rate and will reboot using the last used
baud rate.
Example:
sbr 57600
Syntax:
h
s = string
t = tap id
x = pixel column number
y = pixel row number
Example: to retrieve the current camera settings
gcp <CR>
Setting Baud Rate
Camera Help Screen
For quick help, the camera can retrieve all available commands and parameters through
the serial interface.
To view the help screen, use the command:
The help screen lists all commands available. Parameter ranges displayed are the ranges
available under the current operating conditions. The ranges depend on the current
camera operating conditions, and you may not be able to enter these values.
03-032-20044-03 Teledyne DALSA
Page 25

Falcon 4M Camera Manual
25
ccf correction calculate fpn
clm camera link mode m 2/ 3/ 15/ 16/
cpa correction prnu algorithm mi 2/ 4/ :1-1023
csn coefficient set number i 0-5
css correction set sample m 32/ 64/ 128/ 256/ 512/ 1024/
dpc display pixel coefficients xyxy 1-2352:1-1728:1-2352:1-1728
edc enable debounce circuit m 0/ 1/
efd enable frame dump m 0/ 1/ 2/
epc enable pixel coefficients ii 0-1:0-1
gcm get camera model
gcp get camera parameters
gcs get camera serial
gcv get camera version
gfc get fpn coefficient xy 1-2352:1-1728
gpc get prnu coefficient xy 1-2352:1-1728
gsf get signal frequency m 1/ 4/
h help
lpc load pixel coefficient
rc reset camera
rfs restore factory settings
rpc reset pixel coefficients
rus restore user settings
sao set analog offset ti 0-0:0-511
sbr set baud rate m 9600/ 19200/ 57600/ 115200/
sdo set digital offset ti 0-2:0-2048
sem set exposure mode m 2/ 3/ 4/ 6/ 7/
set set exposure time f 10-999989 [us]
sfc set fpn coefficient xyi 1-2352:1-1728:0-1023
snd set number frame dumps i 1-7
sot set output throughput m 260/ 320/
spc set prnu coefficient xyi 1-2352:1-1728:0-28671
spm set prnu multiplier m 4/ 8/ 16
ssb set subtract background ti 0-4:0-511
ssf set sync frequency f 1.0-62.2 [Hz]
ssg set system gain ti 0-4:0-65535
svm set video mode i 0-12
tpv test pattern value m 63/ 127/ 255
vt verify temperature
vv verify voltages
wfc write fpn coefficients
wpc write prnu coefficients
wse window start end iixyxy 0-0:1-1:1-1:1-1725:2352-2352:4-1728
wss window set sequence i 0-1
wts window trigger source m 1/ 2/
wus write user settings
Example Help Screen (4M60)
Teledyne DALSA 03-032-20044-03
OK>
Page 26
Falcon 4M Camera Manual
26
Syntax:
gcp
Retrieving Camera Settings
To retrieve current camera settings, use the command:
3.1 First Power Up Camera Settings
When the camera is powered up for the first time, it operates using the following factory
settings:
PT-4x-04M60
Flat field coefficients enabled (calibrated in exposure mode 2, 55 fps, and an
exposure time of 2 ms [non-concurrent readout and integration], snapshot mode
1, number of fast frame dumps = 1)
Exposure mode 2
60 fps
9995 µs exposure time
Camera Link mode 16 (Medium configuration, 4 taps. 10 bits)
80 MHz pixel rate (320 MHz total throughput)
Full window (2352 x 1728)
Snapshot mode 1 enabled (EFD 1)
PT-2x-04M30
Flat field coefficients enabled (calibrated in exposure mode 2, 29 fps, and
exposure time of 2 ms [non-concurrent readout and integration], snapshot mode
1, number of fast frame dumps = 1)
Exposure mode 2
30 fps
14992 µs exposure time
Camera Link mode 3 (Medium configuration, 2 taps. 10 bits)
80 MHz pixel rate (160 total throughput)
Full window (2352 x 1728)
Snapshot mode 1 (EFD 1)
03-032-20044-03 Teledyne DALSA
Page 27
Falcon 4M Camera Manual
27
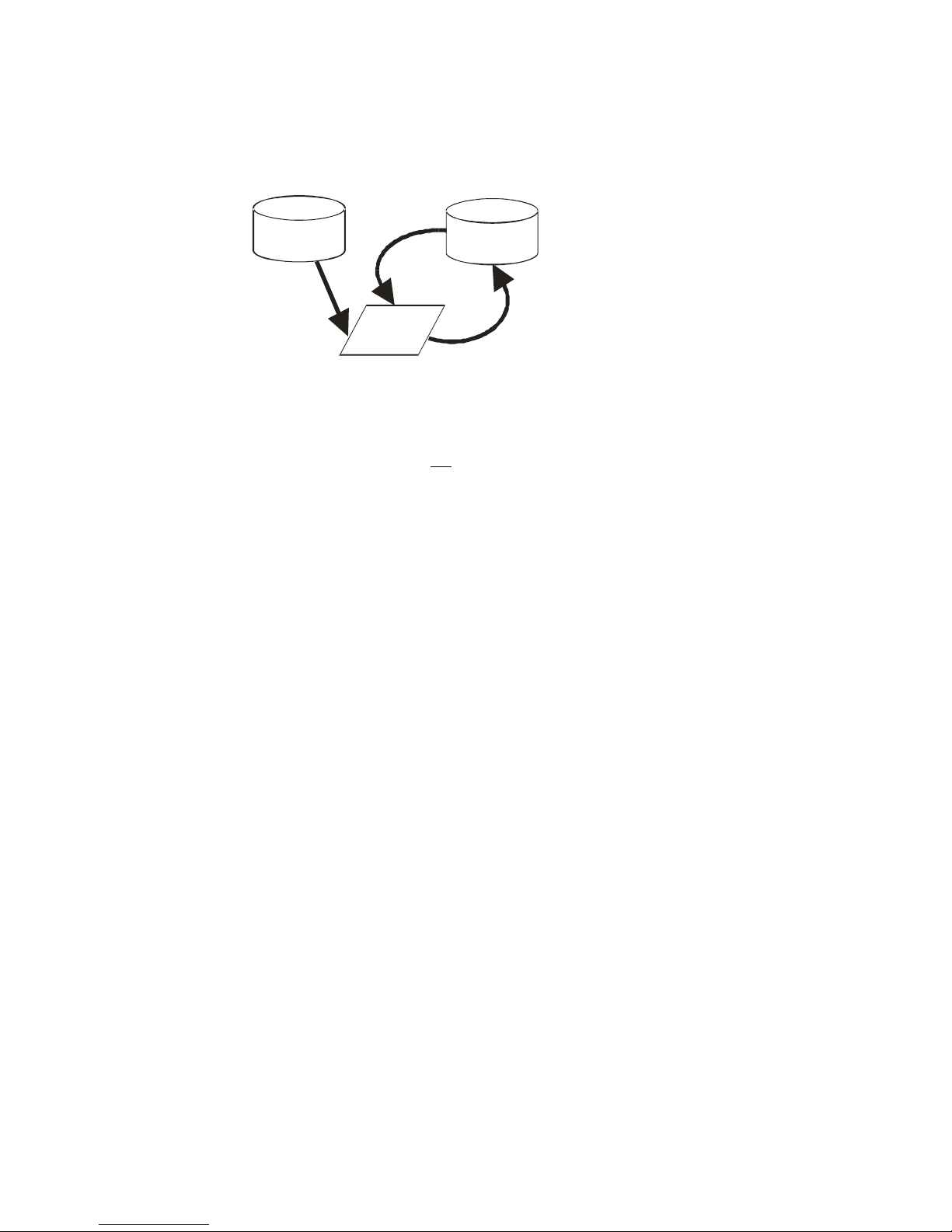
Factory
Settings
Current
Session
wus
rus
rfs
User
Settings
3.2 Saving and Restoring Settings
Figure 12: Saving and Restoring Overview
Factory Settings
You can restore the original factory settings at any time using the command rfs.
Note: This command does not restore flat field coefficients. Refer to the lpc command.
User Settings
You can save or restore your user settings to non -volatile memory using the following
commands.
To save all current user settings to non-volatile memory, use the command wus. The
camera will automatically restore the saved user settings when powered up.
To restore the last saved user settings, use the command rus.
Note: on power-up the camera will restore the FFC coefficients where csn is pointing to.
Example:
csn 1 (and choose coeff set 1)
wus
rc or power cycle
Coefficients from csn 1 are restored
Current Session Settings
These are the current operating settings of your camera. These settings are stored in the
cam era‘s volatile m em ory and w ill n ot be restored once y ou p ow er d ow n your cam era or
issue a reset camera command (rc). To save these settings for reuse at power up, use the
command wus.
3.3 Camera Output Format
3.3.1 How to Configure Camera Output
The 4M Falcon cameras offer great flexibility when configuring your camera output.
Using the clm comm a n d , you d eterm in e the cam era‘s Cam era Lin k configuration,
Teledyne DALSA 03-032-20044-03
Page 28
Falcon 4M Camera Manual
28
Camera Link Mode Configuration
(Controlled by clm command)
Pixel Rate
Configuration
(Controlled by
sot command)
Command
Camera Link
Configuration
Camera Link Taps
Bit
Depth
clm 2
Base
2 Camera Link taps
where:
1 = Taps 1+3
2 = Taps 2+4
8
sot 130 = 65
MHz strobe
sot 160 = 80
MHz strobe
clm 3
Base
2 Camera Link taps
where:
1 = Taps 1+3
2 = Taps 2+4
10
sot 130 = 65
MHz strobe
sot 160 = 80
MHz strobe
number of output taps, and bit depth. Using the sot command, you determine the
cam era‘s outpu t rat e. These tw o com mand s work tog eth er to d etermin e you r fin a l cam era
output configuration.
4M30 Data Readout Configurations
03-032-20044-03 Teledyne DALSA
Page 29

Falcon 4M Camera Manual
29
Camera Link Mode Configuration (Controlled by clm
command)
Pixel Rate
Configuration
(Controlled by
sot command)
Command
Camera Link
Configuration
Camera Link Taps
Bit
Depth
clm 2
Base
2 Camera Link taps
where:
1 = Taps 1+3
2 = Taps 2+4
8
sot 130 = 65
MHz strobe
sot 160 = 80
MHz strobe
clm 3
Base
2 Camera Link taps
where:
1 = Taps 1+3
2 = Taps 2+4
10
sot 130 = 65
MHz strobe
sot 160 = 80
MHz strobe
clm 15
Medium
4 Camera Link taps
where:
1 = Tap 1
2 = Tap 2
3 = Tap 3
4 = Tap 4
8
sot 260 = 65
MHz strobe sot
320 = 80 MHz
strobe
clm 16
Medium
4 Camera Link taps
where:
1 = Tap 1
2 = Tap 2
3 = Tap 3
4 = Tap 4
10
sot 260 = 65
MHz strobe
sot 320 = 80
MHz strobe
Purpose:
Sets th e cam era‘s Cam era Lin k con figuration, number of Camera
Link taps and data bit depth. Refer to the tables above for a
description of each Camera Link mode.
Syntax:
clm m
Syntax Elements:
m
Output mode to use:
2: Base configuration, 2 taps, 8 bit output
3: Base configuration, 2 taps, 10 bit output
15: Medium configuration, 4 taps, 8 bit output (4M60 only)
16: Medium configuration, 4 taps, 10 bit output (4M60 only)
Notes:
To retrieve the current Camera Link mode, use the
command gcp
For details on line times and frame readout times when
using a window of interest, refer to following table.
Example:
clm 3
4M60 Data Readout Configurations
3.3.2 Setting the Camera Link Mode
Teledyne DALSA 03-032-20044-03
Page 30

Falcon 4M Camera Manual
30
Purpose:
Sets the camera link strobe frequency. Refer to the How to
Configure Camera Output section, above, for a description of how
camera link strobe frequency relate to th e cam era‘s Cam era Link
mode.
Syntax:
sot m
Syntax Elements:
m
If using Camera Link mode 2 or 3:
130: 65 MHz camera link strobe with a total throughput of 130
MHz
160: 80 MHz camera link strobe with a total throughput of 160
MHz
If using Camera Link 15 or 16 (4M60 only):
260: 65 MHz camera link strobe with a total throughput of 260
MHz
320: 80 MHz camera link strobe with a total throughput of 320
MHz
Notes:
To retrieve the current throughput, use the command gcp or
get sot.
Example:
sot 260
1. You must first set the camera‘s exp osu re mode using the sem command.
2. Next, if operating in exposure mode 2 use the command ssf to set the frame rate and
the set command to set the exposure time if in exposure mode 2 or 6.
3.3.3 Setting the Camera Link Strobe Frequency
3.4 Setting Exposure Mode, Frame Rate and
Exposure Time
Overview
You have a choice of operating in one of three exposure modes. To select how you want
th e cam era‘s frame rate to b e gener ated :
3.4.1 Non-concurrent vs. concurrent modes of
operation
One of the main benefits of global shutter CMOS devices is that you have the choice to
operate the camera where integration and readout are concurrent or where integration
and readout are not concurrent. Integration refers to the time period that the camera can
be exposed to light and is often referred to as exposure time. Readout refers to the time it
takes to read out every pixel from the camera. For a 60 fps camera, such as the Falcon
4M60, the readout period is around 16.6 ms.
03-032-20044-03 Teledyne DALSA
Concurrent mode is when the camera is integrating the current frame (Frame 1) and at the
same time is reading out the prior frame (Frame 0). By performing integration and
Page 31

Falcon 4M Camera Manual
31
readout in parallel the Falcon 4M60 camera is capable of reaching 60fps. A timing
diagram helps to explain this mode of operation.
Concurrent Mode Timing Diagram
In concurrent mode, a low -to-high transition in the EXSYNC signal starts the integration
time, and a high-to-low transition in the EXSYNC signal starts the readout of image data.
As your frame period approaches the readout period, by reducing the Waiting time, the
Falcon 4M60 camera approaches its maximum frame rate of 60 fps.
In non-concurrent mode the integration and readout period do not ov erlap. While this
does impact your overall frame rate, the main benefit is that in non -concurrent mode you
eliminate or minimize imaging artifacts. When possible, operate the 4M60 camera in nonconcurrent mode.
A timing diagram helps to explain the non-concurrent mode operation.
Non-concurrent Mode Timing Diagram
In non-concurrent mode, a low -to-high transition in the EXSYNC signal starts the
integration time, and a high-to-low transition in the EXSYNC signal starts the readout of
image data. This is the same as in concurrent mode. The difference between these two
modes is that you do not perform your next low -to-high transition of EXSYNC until
readout has completed. The waiting period can be reduced to 0 seconds by starting the
low-to-high transition immediately after readout is complete. The readout time is a fixed
amount of time that is dependant upon the mode of operation of the camera, but is
typically around 16.6 ms.
Teledyne DALSA 03-032-20044-03
Page 32

Falcon 4M Camera Manual
32
Purpose:
Sets th e cam era‘s exp osu r e mod e allow in g you to con trol you r
sync, exposure time, and frame rate generation.
Syntax:
sem m
Syntax Elements:
m
Exposure mode to use. Factory default setting is 2.
Notes:
Refer to the Exposure Modes table below for a quick list of
available modes or to the following sections for a more
detailed explanation.
To obtain the current value of the exposure mod e, use the
command gcp.
Related Commands:
ssf, set
Example:
sem 4
Mode
SYNC
Programmable
Frame Rate
Programmable
Exposure Time
Description
2
Internal
Yes
Yes
Internal frame rate and
exposure time.
4
External
No
No
Smart EXSYNC.
6
External
No
Yes
EXSYNC pulse controlling
the frame rate.
Programmed exposure
time.
3.4.2 Setting the Exposure Mode
Exposure Modes
03-032-20044-03 Teledyne DALSA
Page 33

Falcon 4M Camera Manual
33
Frame Time Frame Time
Readout Time Readout Time
Exposure Time Exposure Time
Programmable (SET) Programmable (SET)
Internally-generated
Exsync
Programmable (SSF) Programmable (SSF)
FVAL
Exposure Modes in Detail
Mode 2: Internally Programmable Frame Rate and Exposure Time
(Default)
The parameter being programmed (i.e. frame rate or exposure time) will be the driving
factor so that when setting the frame rate, exposure time will decrease, if necessary, to
accommodate the new frame rate. In reverse, the frame rate is decreased, if necessary,
when the exposure time entered is greater than the frame period.
Refer to Allowable Exposure Time Increments on page 36 for details on minimum
exposure time increments for this mode.
Note: The camera will not set frame periods shorter than the readout period.
Figure 13: Mode 2.
Teledyne DALSA 03-032-20044-03
Page 34

Falcon 4M Camera Manual
34
Frame Time Frame Time
Readout Time Readout Time
Exposure Time Exposure Time
User Exsync
FVAL
Frame Time Frame Time
Readout Time
Exposure Time
Programmable (SET)
User Exsync
FVAL
Exposure Time
Programmable (SET)
Internally-generated Exsync
Mode 4: Smart EXSYNC, External Frame Rate and Exposure Time
In this mode, EXSYNC sets both the frame period and the exposure time. The rising edge
of EXSYNC marks the beginning of the exposure and the falling edge initiates readout.
Refer to the Allowable Exposure Time Increments table on page 36 for details on
minimum exposure time increments for this mode.
Figure 14: Mode 4.
Mode 6: External Frame Rate, Programmable Exposure Time
In this mode, the frame rate is set externally with the falling edge of EXSYNC generating
the rising edge of a programmable exposure time.
Figure 15: Mode 6.
03-032-20044-03 Teledyne DALSA
Page 35

Falcon 4M Camera Manual
35
Purpose:
Sets th e cam era‘s frame r ate in frames per second (Hz).
Syntax:
ssf f
Syntax Elements:
f
Set the frame rate in Hz in a range from 1-60.4 (4M60 full
frame, 80 MHz camera link strobe, efd 1) or 1-30.6 (4M30 full
frame, 80 MHz camera link strobe, efd 1). Range increases
when using a vertical wind ow of interest.
Notes:
Camera must be operating in exposure mode 2.
Allowable range is dependent on the current Camera Link
mode, snapshot mode, number of fast frame dumps and
window size. Refer to section above for more information on
Camera Link modes. Refer to section 3.5 for more information
on setting a window size.
Changing the frame rate will automatically adjust the
exposure time if necessary. The camera sends a warning w hen
this occurs.
Refer to section 3.3.3 Setting the Camera Link Strobe
Frequency for more information on how to set the camera link
strobe.
When in SEM 2, the help screen (h) will shown the limits for
SSF
Related Commands:
sem, set
Example:
ssf 25.0
3.4.2 Setting the Frame Rate
Teledyne DALSA 03-032-20044-03
Page 36

Falcon 4M Camera Manual
36
Purpose:
Sets th e cam era‘s exp osu r e tim e in µs.
Syntax:
set f
Syntax Elements:
f
Floating point number in µs. Allowable range is 10-999989 µs.
The following table lists allowable increments.
Notes:
Camera must be operating in exposure mode 2 or mode 6.
To retrieve the current exposure time, use the command gcp.
If you enter an exposure time outside of a valid range, the input
will not be accepted. Refer to the help screen (h command) for
the valid range.
If you enter an exposure time which overlaps with the frame
readout, the exposure time will automatically adjust to integral
units of exposure time increments (only in sem 2). The camera
adjusts the exposure without warning. Refer to Allowable
Exposure Time Increments.
Changing the exposure time will automatically adjust the frame
rate if necessary (only for sem 2). The camera sends a w arning
when this occurs.
Related Commands:
sem, ssf, clm
Example:
set 5500
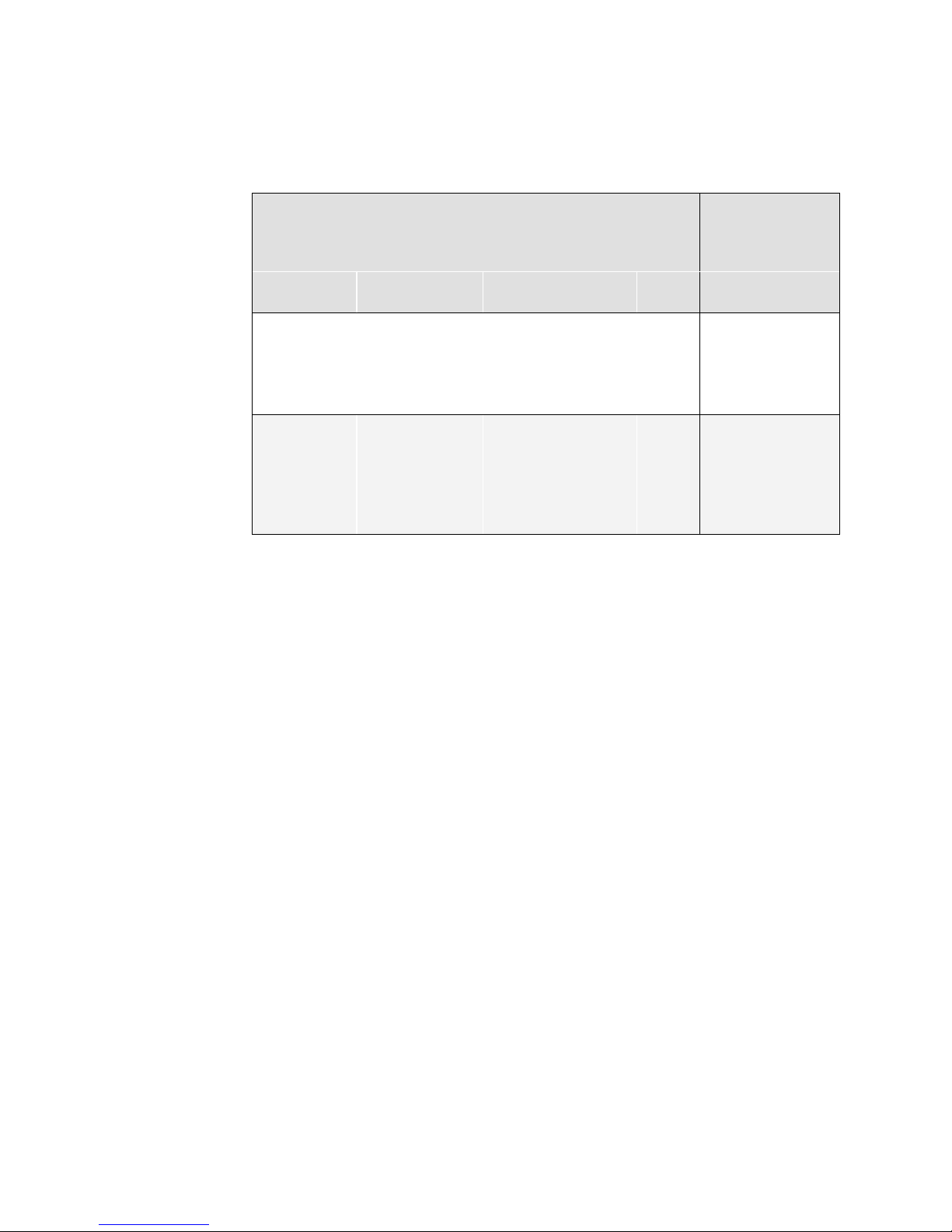
Camera Link Mode
(clm command)
Allowable Exposure Time Increments
15 or 16
18.513 µs (80/ 65 MHz
camera link strobe)
1 µs
when exposure time overlaps
frame readout
when exposure time does not
overlap frame readout
2 or 3
37.038 µs (80 MHz
camera link strobe)
45.638 µs (65 MHz
camera link strobe)
1 µs
when exposure time overlaps
frame readout
when exposure time does not
overlap frame readout
3.4.3 Setting the Exposure Time
Allowable Exposure Time Increments
03-032-20044-03 Teledyne DALSA
Note: Although you must be operating the camera in exposure mode 2 or mode 6 in order
to use the set exposure time (set) command, the allowable exposure time increments
listed above also apply to exposure mode 4 (Smart EXSYNC) or 6 when exposure time
Page 37

Falcon 4M Camera Manual
37
Purpose:
When enabled, the camera does not respond to any pulses on the
Exync input smaller than 1µs. The camera ships with this feature
disabled.
Syntax:
edc i
Syntax Elements:
i
EXSYNC debounce.
0 = EXSYNC debounce disabled
1 = EXSYNC debounce enabled
Notes:
When disabled, the camera responds to the User EXSYNC input
the same as previous camera versions (00-R and non-RoHS).
Example:
edc 1
Purpose:
Optimizes camera timing for specific EXSYNC situations.
Syntax:
efd i
Syntax Elements:
i
Snapshot mode.
0 = Snapshot mode 0 (off, no fast frame dump)
1 = Snapshot mode 1 (default)
2 = Snapshot mode 2
Notes:
Example:
efd 1
overlaps frame readout. This is because, in exposure mode 4, the falling edge is captured
by the camera every 18.513 µs for example in the case of clm 15 or 16, sot 320. In
exposure modes 4 or 6 the exposure time effectively has an uncertainty of the allowable
time increment.
Refer to section 3.4 Exposure Correction for more information on the clm and sot (sets
pixel rate) commands.
Refer to section Figure 13: Mode 2 on page 33 for an example where exposure time
overlaps frame readout.
3.4.4 Enabling EXSYNC Debounce Circuit
3.5 Snapshot Modes
Teledyne DALSA 03-032-20044-03
Page 38

Falcon 4M Camera Manual
38
Snapshot Mode
The Falcon 4M60 and Falcon 4M30 cameras include a feature called Snapshot Mode.
Snapshot Modes 1 and 2 allow the camera to produce usable images when intervals
between EXSYNCs are large (>200 ms).
Previously only snapshot mode 0 was available (no fast frame dump) which would
even tu ally resu lt in a comp letely saturated ‗first‘ image after a very long EXSYNC idle
period (seconds), as shown below .
First Frame Elevated Offset - efd 0,sem 4, External EXSYNC and exposure (smart EXSYNC)
By altering the internal timing, Snapshot Mode 1 performs a fast clearing of a frame
concurrently with integration. Thus, any dark current that caused elevated dark offset
levels, FPN or hot pixels, is cleared from the sensor prior to readout. The end result is that
the camera produces a usable first image.
With Snapshot Mode 1, please note that the timing of EXSYNC with respect to the
in tegration time has changed. The figure below illustrates Snapshot Mode 1 timing. The
difference is that the Integration Time, Z, is now equal to the EXSYNC high time, X, plus
the time it takes to clear the image, Y (plus 3.1 µs of additional overhead). The total time
to clear the frame is Y (approximately 500 µs). Therefore, the minimum integration time in
Snapshot Mode 1 is Y + 3.1 µs. The exact value of Y is listed in the gcp screen as DUMP
TIME.
03-032-20044-03 Teledyne DALSA
Page 39

Falcon 4M Camera Manual
39
Snapshot Mode 1. Exposure concurrent with readout is allowed
If, having a minimum integration time of about 500 µs is not acceptable, then Snapshot
Mode 2 can be used, below, which allows for integration times as low as 10 µs at the
expense of concurrent integration and readout. Therefore, it is recommended to only use
Snapshot Mode 2 if your integration time must be below 500 µs. This is also the reason
why Snapshot Mode 1 is the default mode. The following figure shows the timing
operation of Snapshot Mode 2. Notice that with Snapshot Mode 2 there is a delay of Y
between the rise of integration and when exposure begins.
Snapshot Mode 2. Exposure concurrent with readout is NOT allowed
Teledyne DALSA 03-032-20044-03
Page 40

Falcon 4M Camera Manual
40
The following timing diagrams show how the timing changes when snapshot modes are
enabled in sem 2.
sem 2, Snapshot Mode 1 (fast frame dump at falling edge of EXSYNC)
sem 2,. Snapshot Mode 2 (fast frame dump at rising edge of EXSYNC)
03-032-20044-03 Teledyne DALSA
Page 41

Falcon 4M Camera Manual
41
CSN
EFD
0, 3 1 1, 4 0 2, 5
2
Determining the Y parameter
As mentioned, the Y parameter is around 500 µs. The Y parameter depends upon the
number of rows used, whether the camera outputs at 80 MHz or 65 MHz, and whether
the camera being used is in 2 tap mode (Falcon 4M30) or 4 tap mode (Falcon 4M60). To
obtain the Y parameter, execute the gcp command. The camera should respond and
state:
―Frame Du mp Tim e: 487.5 µs‖.
The 487.5 µs used here represents the Y parameter for the factory settings of the Falcon
4M60.
What do I do if I cannot use either Snapshot Mode?
We recommend that you operate the camera in Snapshot Mod e. However, in some cases
this may not be possible. Therefore, the camera can be setup to disable Snapshot Mode
(efd 0) and return the camera to the mode used prior to the introduction of Snapshot
Mode.
Different snapshot modes will produce different FPN, and possibly different PRNU
patterns. The user is encouraged to match the snapshot mode with their corresponding
coefficients. This camera has 6 sets of coefficients: 3 factory and 3 user:
FPN and PRNU coefficients for set 0 (csn 0) were calculated with EFD 1 and set 1 with
EFD 0 as shown above, etc. Sets 3 to 5 can be user writen, and mirror their factory
counterparts as shown above.
Example:
The user changes from snapshot mode 1 to 0.
In order to load the appropriate coefficients we must first point to the right set by
sending csn 1.
The coefficients need to be then loaded into volatile memory by sending lpc.
If the user wishes to load csn 1 on camera power-up then these settings should be
saved by sending wus.
Teledyne DALSA 03-032-20044-03
Page 42

Falcon 4M Camera Manual
42
Purpose:
Sets the number of fast-frame dumps to be used within snapshot
modes 1 or 2.
Syntax:
snd i
Syntax Elements:
i
Set number of frame dumps.
1-7
Notes:
Only enabled during Snapshot modes (efd) 1 or 2.
Example:
snd 3
Set Number of Frame Dumps
When within snapshots modes 1 and 2 the user can choose to perform more than one fast
frame dump during a dump sequence. In some cases increasing the number of fast frame
dumps may help reduce the small residuals left behind after long EXSYNC idle times. In
general the user is recommended to use the factory default setting: snd 1.
Note that increasing the number of dumps will decrease the maximum frame rate that
can be achieved (this can be queried using the help screen in sem 2).
3.6 Setting a Vertical Window of Interest
A window of interest is a subset of a full frame image that is desired as output from the
camera. Because the sensor is outputting only the designated window of interest, the
benefit is an increase in frame rate and a reduction in data volume.
To allow quick activation of new window coordinates, the camera allows you to preset
one sequence of window coordinates. These coordinates wait for a trigger and because
they have been preprogrammed, the new window is activated extremely quickly.
To set a window of interest
1. Set the window activation method— either software activated (wts 1) or hardware
activated through CC4 (wts 2).
2. Set the window coordinates, using the command wse 0 1 x y x y.
3. Activate the window coordinates by:
o transitioning CC4 to its complementary logic state when using an external
window control source ( wts = 2) .
or
o transitioning to wss 0 or wss 1 depending on the complementary logic state
when using an internal window control source ( wts = 1).
4. When, or if, necessary, repeat steps 2 and 3 to set and activate a new window.
03-032-20044-03 Teledyne DALSA
Page 43

Falcon 4M Camera Manual
43
Max Frame Rate vs Vertical Window Size
10.0
100.0
1000.0
10000.0
0 250 500 750 1000 1250 1500 1750 2000
Vertical Window Size (# lines)
Max Frame Rate (fps) _
clm 16, sot 320
clm 3, sot 160
Purpose:
Sets a window of interest.
Syntax:
wse q i x1 y1 x2 y2
Syntax Elements:
q
Window sequence id to use. In this camera, the sequence id is
always 0.
i
Window to set. You can only set one window, so this is always
1. x1
Window start corner value. Since there is only a vertical (and not
horizontal) window of interest in this camera, this value is
always set to 1.
y1
Window start pixel number in a range from 1-1725 and must
belong to the following set: 1, 5, 9, …1725.
x2
Window end corner value. Since there is only vertical (and not
horizontal) window of interest in this camera, this value is
The following graph illustrates the relationship of maximum frame rate versus sequence
size.
Figure 17: Maximum Frame Rate versus Sequence Size (efd 1, snd 1)
Window Start End Command
Teledyne DALSA 03-032-20044-03
Page 44

Falcon 4M Camera Manual
44
always set to 2352.
y2
Window end pixel number in range from 2-1728 and must
belong to the following set: 4, 8, 12, …1728.
Related Commands:
wss, wts
Example:
wse 0 1 1 13 2352 544
Purpose:
To allow quick activation of new window coordinates, the camera
allows you to preset one sequence of window coordinates. These
coordinates wait for a trigger and because they have been
preprogrammed, the new w indow is activated extremely quickly.
This command sets the control method for toggling window
sequences.
Syntax:
wts i
Syntax Elements:
i
1
New window sequence is triggered through software
command wss.
2
New window sequence is triggered through Camera Link
inputs (CC4).
Related Commands:
wss
Example:
wts 2
Notes:
If you are using a hardware trigger (wts = 2), refer to Figure
18 for timing requirements.
If you are using a software trigger, refer to the next section for
command syntax and timing requirements.
New Window Sequence
thWLEVtsWLEV
EXSYNC
Window Select (CC4)
Table 1: Line Time and Frame Readout Time when using a Window of Interest
A rough estimate of the frame readout time, when using a large (100 lines+) window of
interest, can be found using the following formula:
Frame Readout Time= ( Number of Lines + 1) x Sensor Line Time
Where Sensor Line Time = 18.5 µs @ CLM 15/16, SOT 320/260
= 37.0 µs @ CLM 2/3, SOT 160
= 45.6 µs @ CLM 2/3, SOT 130
Setting the Window Sequence
Figure 18: Detailed Timing Requirements for Hardware Triggering New Window Sequence
03-032-20044-03 Teledyne DALSA
Page 45

Falcon 4M Camera Manual
45
Symbol
Definition
Min
Max
thWLEV
Window Level Hold Time- The Window Control
Signals must remain valid and constant after the
EXSYNC falling edge for at least the thWLEV time.
3 EXSYNCs
NA
tsWLEV
Window Level Set Time- The Window Control Signals
must remain valid and constant at least tsWLEV
before the EXSYNC falling edge.
3 EXSYNCs
NA
Purpose:
To allow quick activation of new window coordinates, the camera
allows you to preset one sequence of window coordinates. These
coordinates wait for a trigger and because they have been
preprogrammed, the new w indow is activated extremely quickly.
This command loads a new window sequence.
Syntax:
wss m
Syntax Elements:
m
Window sequence trigger where changing from 0 to 1 (or vice
versa) toggles the current window sequence being used.
Related Commands:
wts
Example:
wss 0
Notes:
There is a delay between the issue of the wss command and the
time when the new window sequence is triggered (Figure 19)
When toggling windows, the camera discards the first frame
read out after the toggle. This prevents the camera from
sending out erroneous data.
Upon pow er up or reset of camera, the camera assumes that a
wss 0 has already been executed .
wss
value
Current Window Sequence New Window Sequence
tDelay
Serial Communication
Window Sequence
Exsync
Symbol
Definition
Min
Max
tDelay
This is the time d elay that occurs to decode
the wss command.
1 EXSYNC
3 EXSYNCs
Timing Parameters
Toggling Window Sequences Using a Software
Trigger
Figure 19: Time Delay for New Window to Become Active when Using wss Command
Timing Parameters
Teledyne DALSA 03-032-20044-03
Page 46

Falcon 4M Camera Manual
46
where
V
output
=
digital output pixel value
V
input
=
digital input pixel value from the sensor
PRNU( pixel)
=
PRNU correction coefficient for this pixel
FPN( pixel )
=
FPN correction coefficient for this pixel
Background Subtract
=
background subtract value
System Gain
=
digital gain value
Note: If your
illumination or white
reference does not
extend the full field of
view of the camera,
the camera will send a
warning.
3.7 Flat Field Correction
This camera has the ability to calculate correction coefficients in order to remove non uniformity in the image. This video correction operates on a pixel-by-pixel basis and
implements a two point correction for each pixel. This correction can reduce or eliminate
image distortion caused by the following factors:
Fixed Pattern Noise (FPN)
Photo Response Non Uniformity (PRNU)
Lens and light source non-uniformity
Correction is implemented such that for each pixel:
V
output
=[(V
- FPN( pixel ) - digital offset) * PRNU(pixel) – Background Subtract] x System Gain
input
The algorithm is performed in two steps. The fixed offset (FPN) is determined first by
performing a calculation without any light. This calibration determines exactly how m uch
offset to subtract per pixel in order to obtain flat output when the sensor is not exposed.
The white light (PRNU) calibration is performed next to determine the multiplication
factors required to bring each pixel to the required value (target) for fla t, white output.
Video output is set slightly above the brightest pixel (depending on offset subtracted).
It is important to do the FPN correction first. Results of the FPN correction are used in the
PRNU procedure. We recommend that you repeat the correction when a temperature
change greater than 10 °C occurs (the factory temp is about 37 °C, vt command). In
snapshot mode 1, FPN coefficients are not particularly sensitive to changes in frame rate
or integration time. In snapshot modes 0 and 2, FPN coefficients will be sensitive to
changes in frame rate.
PRNU correction requires a clean, white reference. The quality of this reference is
important for proper calibration. White paper is often not sufficient because the grain in
the white paper will distort the correction. White plastic or white ceramic will lead to
better balancing.
For best results, ensure that:
1) 60 Hz ambient light flicker is sufficiently low not to affect camera performance and
calibration results.
2) The average pixel should be at least 25% below the target output. If the target is too
close, then some pixels may not be able to reach full swing (1023 DN) due to
correction applied by the camera.
3) When 6.25 % of pixels from a single row within the region of interest are clipped, flat
field correction results may be inaccurate.
03-032-20044-03 Teledyne DALSA
Page 47

Falcon 4M Camera Manual
47
4) Correction results are valid only for the current analog offset values. If you change
this value, it is recommended that you recalculate your coefficients.
Let‘s go th r ou gh a flat field calibration example:
1) The camera is placed in sem 2 (no other exposure mode will allow FFC calibration)
2) Settings such as frame rate, exposure time, etc. are set as close as possible to the actual
operating conditions. Set digital gain to X1 (ssg 0 4096) and background subtract
to 0 (ssb 0 0) as these are the defaults during FFC calibration.
3) Place the camera in the dark and send CCF, this performs the FPN correction and
automatically save the FPN coefficients to non-volatile memory
4) Set epc 1 0, which enables the FPN correction and verify the signal output is close
to 0 DN. Leave epc 1 0 for the next step since the cpa target assumes there is no
FPN. This is important on the 4M60/ 30 due to the large dark offset values.
5) Illuminate the sensor, such that with EPC 1 0, it reaches 50 - 70 % saturation.
6) Send cpa 2 T where T is typically 1.3X the average output level. This is important
since if the target is too low (<1.1X), then some pixels may not be able to reach full
swing (1023 DN) due to corrections applied by the camera.
Here is the factory calibration procedure for Snapshot Mode 1 (efd 1):
1) The camera is placed in sem 2, sot 320, clm 16, efd 1, snd 1, full window, ssg
0 4096, ssb 0 0, sao 0 0, ssf 55, set 2000. This last part is important, ssf
55 and set 2000 ensures that the camera is in non-concurrent mode. In non-
concurrent mode, readout and integration do not overlap thus eliminating some
residual artifacts associated with concurrent mode.
2) The camera is placed in the dark and ccf is run
3) With epc 1 0 the sensor is illuminated (Light Source: Broadband Quartz Halogen,
3250 K, with a 750 nm cutoff filter) with a light level of 22.8 W/ cm2. This ensures each
camera will have the same responsivity since the light level and target value are
always the same. Typical output levels for the camera at this light level are 650.
4) The sensor window at this point has been cleaned thoroughly such that there are no
significant blemishes present.
5) Send cpa 2 840. Typically this yields an average PRNU coefficient of about 1.3X.
Teledyne DALSA 03-032-20044-03
Page 48

Falcon 4M Camera Manual
48
How can one match gain and offset values on multiple cameras?
One way is of course to use flat field correction. All cameras would be set up under the
same conditions including lighting and then calibrated with ccf and cpa. This can be
time-consuming and complicated (especially the white target). Another way is to use
analog offset and system gain (digital gain):
1) Starting from factory settings (sao 0 0, ssg 0 4096, epc 1 1), take note what
the highest dark offset is among the set of cameras. If the highest dark offset is h igher
than about 16 DN (10 bit) you might want to consider recalibrating the FPN
correction (ccf). Large differences in dark offset between the factory and user are
typically caused by differences in temperature from factory to user. Large dark offsets
will result in PRNU-correction-induced FPN and should therefore be avoided.
2) Increase the offset (camera in dark) on all cameras (sao command) until they are the
same and reach at least 4 DN (10 bit).
3) Illuminate to about 80 % saturation (820 DN, 10 bit) and note the highest signal level
among the set of cameras.
4) Increase the digital gain (ssg) on the cameras until they all reach the same output
level (highest of all cameras).
5) Place camera in the dark and repeat step 2 to 4 until both dark offset and 80 % sat
signal levels are equal on all cameras.
An important note on window blemishes:
When flat field correction is performed, window cleanliness is paramount. The figure
below shows an example of what can happen if a blemish is present on the sensor
window when flat field correction is performed. The blemish will cast a shadow on the
wafer. FFC will compensate for this shadow by increasing the gain. Essentially FFC will
create a white spot to compensate for the dark spot (shadow). As long as the angle of the
incident light remains unchanged then FFC works well. However when the angle of
incidence changes significantly (i.e. when a lens is added) then the shadow will shift and
FFC will makes things worse by not correcting the new shadow (dark spot) and
overcorrecting where the shadow used to be (white spot). While the dark spot can be
potentially cleaned, the white spot is an FFC artifact that can only be corrected by another
FFC calibration.
03-032-20044-03 Teledyne DALSA
Page 49

Falcon 4M Camera Manual
49
A Note on the Color Model and FFC
Flat field correction can be used in the color cameras to both correct FPN and PRNU, as
on mono cameras, and perform white balancing. However, we recommend that the user
use the factory calibrated FFC coefficients for PRNU and FPN correction, and the digital
system gain (ssg command) to perform white balancing.
For example, when a monochrome sensor images a uniform white target illuminated by a
halogen light source, each pixel outputs approximately the same DN value. When the
same target is imaged by a color sensor, the red pixels may produce more signal than the
green pixels, which in turn produce more than the blue pixels.
White balancing involves increasing the gain of the blue and green pixels such that they
match the values from the red. When all color channels are matched the image will look
white when interpolated by the frame grabber or host PC.
From th e FFC algor ithm ‘s point of view this is simply a special case of PRNU which
results in large differences for each of the PRNU coefficients, on a pixel-per-pixel basis, in
order to compensate for color.
The same principles apply to color as to mono with the exception that you can expect to
see a wider range of PRNU coefficient values.
Here is an example of a typical FFC calibration operation using a halogen light source:
1) The camera is placed in sem 2 (no other exposure mode will allow FFC calibration).
2) Settings such as frame rate, exposure time, etc. are set as close as possible to the actual
operating conditions. Set digital gain to x1 (ssg 0 4096) and background subtract
to 0 (ssb 0 0), as these are the defaults during FFC calibration.
3) Place the camera in the dark and send the ccf command , this function performs the
FPN correction and automatically saves the FPN coefficients to non-volatile memory.
4) Set epc 1 0, which enables the FPN correction and verify that the signal output is
close to 0 DN. Leave epc 1 0 for the next step as the cpa target assumes that there
is no FPN. This is important on the 4M60/ 30 due to the large dark offset values.
5) Illuminate the sensor, such that with epc 1 0, the red channel (i.e. red pixels)
reaches 50-70 % saturation. Here we assume that the red channel is the brightest and
the blue channel the weakest.
Send cpa 2 T where T is typically 1.3x the average red channel output level. This step is
important because if the target is too low (< 1.1x), then some pixels may not be able to
reach full swing (1023 DN) due to other corrections applied by the camera. Also ensure
that the blue channel is not too dim. The default spm setting is 8x which will allow for a
maximum PRNU coefficient equal to 8x; hence the red channel should be LESS than 8x
brighter than the blue (typically 4-5x is what we see in the factory).
In the factory, for color cameras only, we use a halogen light followed by a BG38 to act as
a light source. The effective color temperature of this light is about 5200 K and its spectral
distribution is shown in the figure below.
Teledyne DALSA 03-032-20044-03
Page 50

Falcon 4M Camera Manual
50
Purpose:
Selects the coefficient set to use. The camera ships with a factory
calibrated set of FPN and PRNU coefficients. The factory coefficients
cannot be erased or modified.
Syntax:
csn i
Syntax Elements:
i
Coefficient set number to use.
0-2 = Factory calibrated sets of FPN and PRNU coefficients.
These coefficients cannot be erased or modified.
3-5 = User calibrated sets of FPN and PRNU coefficients. These
coefficients can be deleted or modified.
Notes:
The camera ships with factory calibrated FPN and PRNU
coefficients saved to sets as follows:
csn
efd
0, 3 1 1, 4 0 2, 5
2
When you first boot up the camera, the camera operates using
set 3 (csn 3) enabled.
efd refers to which snapshot mode w as used during the FFC
calibration. Note that in csn 3,4, and 5 the user can recalibrate
the FFC coefficients via the ccf and cpa commands using ANY
snapshot mode, without restrictions.
Example:
csn 0
Figure 20: Spectral distribution of light source used during calibration of color cameras
only. This corresponds roughly to a 5200 K color temperature.
3.7.1 Selecting Factory or User Coefficients
03-032-20044-03 Teledyne DALSA
Page 51

Falcon 4M Camera Manual
51
Purpose:
The camera ships with the FPN and PRNU coefficients enabled, but
you can enable and disable FPN and PRNU coefficients whenever
necessary.
Syntax:
epc i i
Syntax Elements:
i
FPN coefficients.
0 = FPN coefficients disabled
1 = FPN coefficients enabled
i
PRNU coefficients.
0 = PRNU coefficients disabled
1 = PRNU coefficients enabled
Notes:
The coefficient set that you are enabling or disabling is
determined by the csn value. Refer to the previous section for
an explanation of the csn command.
Example:
epc 0 1
Purpose:
Sets the number of frames to sample when performing pixel
coefficient calculations. Higher values cause calibration to take
longer but provide the most accurate results.
Syntax:
css i
Syntax Elements:
i
Number of lines to sample. Allowable values are 32, 64, 128
(factory default), 256, 512, or 1024.
Notes:
To return the current setting, use the gcp command.
Example:
css 1024
3.7.2 Enabling Pixel Coefficients
3.7.3 Selecting the Calibration Sample Size
Setting the Number of Frames to Sample
Teledyne DALSA 03-032-20044-03
Page 52

Falcon 4M Camera Manual
52
Purpose:
Performs FPN calibration and eliminates FPN noise by subtracting
away individual pixel dark current.
Syntax:
ccf
Notes:
Before performing this command, stop all light from entering
the camera. (Tip: cover lens with a lens cap.)
The goal is to subtract all non -uniformities and offsets in order
to obtain a 0DN output in the dark. Analog offset should
therefore be set to 0 since it gets subtracted out during CCF.
Set the digital gain (ssg) to X1 since during calibration it gets
forced to X1 (ssg 0 4096).
Perform FPN correction before PRNU correction.
The ccf command is not available w hen the camera is using the
factory calibrated coefficients (csn 0-2). You must select the
user coefficient set (csn 3-5) before you can perform FPN
calibration. An error message is returned if you attempt to
perform FPN calibration when using csn 0-2.
Example:
ccf
Purpose:
Sets an in divid u al p ixel‘s FPN coefficient.
Syntax
sfc x y i
Syntax Elements:
x
The pixel column number from 1 to 2352.
y
The pixel row number from 1 to 1728.
i
Coefficient value in a range from 0 to 1023.
Notes:
The sfc command is not available w hen the camera is using
the factory calibrated coefficients (csn 0-2). You must select
the user coefficient set (csn 3-5) before you can perform FPN
calibration. An error message is returned if you attempt to
perform FPN calibration when using csn 0-2.
Although in theory a user can optimize coefficients on a pixel-
by-pixel basis, in practice this becomes unmanageable as there
are over 4 million pixels. Therefore, coefficient optimization via
this command is discouraged.
Example:
sfc 10 50
3.7.4 Performing FPN Calibration
Calibrating All Camera Pixels
Calibrating Individual Pixels
03-032-20044-03 Teledyne DALSA
Page 53

Falcon 4M Camera Manual
53
Purpose:
Performs PRNU calibration to a targeted, user defined value and
eliminates the difference in responsivity between the most and least
sensitive pixel creating a uniform response to light. Using this
command, you must p rovide a calibration target.
Executing these algorithms causes the ssb command to be set to 0
(no background subtraction) and the ssg command to 4096 (unity
digital gain). The pixel coefficients are disabled (epc 0 0) d uring
the algorithm execution but return to the state they were prior to
command execution.
Syntax:
cpa x y
Syntax Elements:
x
PRNU calibration algorithm to use:
2 = Calculates the PRNU coefficients using the entered target
value as shown below:
PRNU Coefficient =
Target
(AVG Pixel Value ) - (FPN + value)sdo
i
i
i
This algorithm is useful for achieving uniform output across
multiple cameras. It is important that the target value (set with
the next parameter) is set to be greater than 1.2X than the
average signal level when FPN correction is enabled (EPC 1 0).
This is to ensure that full signal swing can be reached for most
pixels.
y
Peak target value in a range from 1 to 1023DN. The target value
must be greater than the current peak output value. If some
pixels are below the target value then the PRNU coefficients for
said pixels will be set to 1X (ie. PRNU coefficients can never be
less than 1X). Similarly the maximum PRNU coefficient is 4X,
8X, or 16X depending on the SPM setting, if more is needed it
will clip at 4X, 8X, or 16X, respectively.
Notes:
Calibrate FPN before calibrating PRNU. If you are not
performing FPN calibration then issue the rpc (reset pixel
coefficients) command and set the sdo (set digital offset) value
so that the output is near zero under dark. FPN calibration is
highly recommended, the use of SDO is not.
The cpa command is not available when the camera is using the
factory calibrated coefficients (csn 0-2). You must select the
user coefficient set (csn 3-5) before you can perform PRNU
calibration. An error message is returned if you attempt to
perform PRNU calibration w hen using csn 0-2.
Example:
cpa 2 700
3.7.5 Performing PRNU Calibration
Teledyne DALSA 03-032-20044-03
Page 54

Falcon 4M Camera Manual
54
Purpose:
Sets the maximum PRNU multiplier that will result when CPA is
executed.
Syntax:
spm m
Syntax Elements:
m
Maximum multiplier value: 4X, 8X, or 16X
Notes:
Note that the actual maximum multiplier value will be slightly
less than 4X, 8X, or 16X.
In the past monochrome cameras had this permanently set to
4X since in most applications no more than this was required
and 4X is the maximum multiplier that can be used before 8-bit
images start seeing missing codes.
8X multipliers are used in color since, in some cases, the colors
differ by more than a factor of 4.
Higher maximum multiplier values can also serve to help
correct som e ‗d efective‘ pixels w hich exh ibit very high offset or
low responsivity. Care needs to be taken to ensure only a small
portion of the PRNU coefficients are very high in value,
otherwise missing codes and excessive noise will result. That is,
use the smallest maximum multiplier setting possible. 4X is
recommended for mono, 8X for color
Example:
spm 4
Setting Maximum PRNU Multiplier
03-032-20044-03 Teledyne DALSA
Page 55

Falcon 4M Camera Manual
55
Purpose:
Sets an in divid u al p ixel‘s PRNU coefficient.
Syntax
spc x y i
Syntax Elements:
x
The pixel column number from 1 to 2352.
y
The pixel row number from 1 to 1728.
i
Coefficient value in a range from 0 to 12287, 28671, or
61439 (spm 4,8, or 16) where
PRNU multiplier = 1 + (
4096
i
)
Notes:
The spc command is not available w hen the camera is using
the factory calibrated coefficients (csn 0-2). You must select
the user coefficient set (csn 3-5) before you can perform
PRNU calibration. An error message is returned if you attempt
to perform PRNU calibration when using csn 0-2. To return
the current csn number, send the command get csn.
Although in theory a user can optimize coefficients on a pixel-
by-pixel basis, in practice this becomes unmanageable as there
are over 4 million pixels. Therefore, coefficient optimization via
this command is discouraged.
Example:
spc 10 50 500
Purpose:
Saves the current PRNU coefficients to non -volatile memory.
Syntax:
wpc
Notes:
The wpc command is not available w hen the camera is using the
factory calibrated coefficients (csn 0-2). You must select the
user coefficient set (csn 3-5) before you can perform PRNU
calibration. An error message is returned if you attempt to
perform PRNU calibration w hen using csn 0-2. To return the
current csn number, send the command get csn.
Example:
wpc
Purpose:
Saves the current FPN coefficients to non-volatile memory.
Syntax:
wfc
Notes:
The wfc command is not available w hen the camera is using the
factory calibrated coefficients (csn 0-2). You must select the
user coefficient set (csn 3-5) before you can save FPN
Calibrating Individual Pixels
3.7.6 Saving, Loading and Resetting Coefficients
Saving the Current PRNU Coefficients
Saving the Current FPN Coefficients
Teledyne DALSA 03-032-20044-03
Page 56

Falcon 4M Camera Manual
56
coefficients. An error message is returned if you attempt to save
FPN coefficients when using csn 0-2. To return the current
csn number, send the command get csn.
Example:
wfc
Purpose:
Loads the last saved user coefficients or original factor y coefficients
from non-volatile memory.
Syntax:
lpc
Notes:
The coefficient set that you are loading is determined by the csn
value. Refer to the section, Selecting Factory or User Settings, for
an explanation of the csn command. To return the current csn
number, send the command get csn.
Example:
lpc
Purpose:
Resets the current user coefficients to zero and stores said coefficients
to non-volatile memory.
Syntax:
rpc
Notes:
The rpc command is not available w hen the camera is using the
factory calibrated coefficients (csn 0-2). You must select the
user coefficient set (csn 3-5) before you can reset pixel
coefficients. An error message is returned if you attempt to reset
pixel coefficients when using csn 0-2. To return the current
csn number, send the command get csn.
Purpose:
Returns all the current pixel coefficients in the order FPN, PRNU,
FPN , PRN U… for the range specified by the x and y coordinates.
The camera also returns the pixel number w ith every fifth coefficient.
WARNING: Do not display all pixel coefficients at one time. Keep
the number of pixels small (a sample size of 10 x 10 pixel is
recommended) to avoid waiting too long for the camera to return
information. Coefficient output can be halted by sending any
character (hitting any key on the keyboard).
Syntax:
dpc x1 y1 x2 y2
Syntax Elements:
x1
Start column pixel to display in a range from 1 to 2352.
y1
Start row pixel to display in a range from 1 to 1728.
x2
End column pixel to display in a range from 1 to 2352.
Loading Pixel Coefficients
Resetting the Current Pixel Coefficients
3.7.7 Returning Pixel Coefficient Information
Returning FPN and PRNU Coefficients
03-032-20044-03 Teledyne DALSA
Page 57

Falcon 4M Camera Manual
57
y2
End row pixel to display in a range from 1 to 1728.
Example:
dpc 10 30 20 40
Purpose:
Sets the analog offset.
Syntax:
sao t i
Syntax Elements:
t
Tap selection. Allowable value is 0 for all taps.
i
Analog offset value. Extreme range is 0 - 511 but dynamic
ra n ge is d ep en den t of t h e cam era‘s cu r ren t exposu r e m od e
and gain settings. A value of 100 does not equal an offset of
100DN.
Notes:
When flat field correction is enabled the expectation is that in
the dark the signal level is 0 DN. Some users might require a
non-zero dark output. This can be achieved by increasing
analog offset.
Take care not to increase SAO too much with FFC enabled,
otherwise a PRNU-induced FPN pattern w ill result. Keep the
dark offset below 5 DN (10 bit).
The offset increases linearly with higher values.
Entering a large value offset will cause the camera to digitally
saturate the output image.
The resulting analog offset value depends on other camera
parameters such as temperature, frame rate, and exposure
mode.
Example:
sao 0 20
3.8 Offset and Gain Adjustments
Setting Analog Offset
Teledyne DALSA 03-032-20044-03
Page 58

Falcon 4M Camera Manual
58
Purpose:
Use the background subtract comm and if you w ant to improve
your image in a low contrast scene. This command is useful for
systems that process 8 bit data but want to take advantage of the
cam era‘s 10 bit d igital p rocessin g chain. You sh ou ld try to m ake
your darkest pixel in the scene equal to zero.
Syntax:
ssb t i
Syntax Elements:
t
Color selection. The allow able range is 1 to 4, or 0 for all taps.
1 = Red, 2 = Green (Red), 3 = Green (Blue), 4 = Blue
i
Subtracted value in a range in DN from 0 to 511.
Notes:
When subtracting a digital value from the digital video signal
the output can no longer reach its maximum. Use the ssg
command to correct for this where:
ssg value =
max output value
max output value - ssb value
Entering a large value background w ill cause the camera to
digitally clip the output image.
On a color camera the ssb command can be used to perform
offset adjustment on each color. This may be required as the
gain on each color is typically different.
On the monochrome model, u se the ‗all tap‘ settin g (0) to
adjust the overall offset.
Note that ssb can only be used to DECREASE offset. The sao
command can be used to globally increase offset.
Related Commands:
ssg
Example
ssb 0 25
Factory Calibrated Analog Gains
The camera has a factory calibrated analog gain setting. Adjustment of analog gain is not
available to the user, however. D igital gain is available via the set system gain command
(ssg).
Subtracting Background
03-032-20044-03 Teledyne DALSA
Page 59

Falcon 4M Camera Manual
59
Purpose:
Use the setting digital system gain command in order to:
1) White balance color cameras.
2) Improve the signal output swing after a background subtract.
When subtracting a digital value from the digital video signal,
using the ssb command, the output can no longer reach its
maximum. Use this command to correct for this, where:
ssg value =
max output value
max output value - ssb value
3) Increase or decrease the camera's responsivity by increasing or
decreasing the digital gain. ssg levels that create a digital gain
below 1 will result in the camera not reaching 1023 DN.
Syntax:
ssg t i
Syntax Elements:
t
Color selection. The allow able range is 1 to 4, or 0 for all
colors. . 1 = Red, 2 = Green (Red), 3 = Green (Blue), and 4 =
Blue.
i
Gain setting. The gain ranges are 0 to 65535. The d igital
vid eo values are multiplied by this value where:
Digital Gain=
i
4096
For example, to set a digital gain of 1.0, i equals 4096.
Notes:
Entering a large value gain will cause the camera to digitally
saturate the output image.
Entering a zero value gain will cause the camera to force the
pixels in the designated tap to be 0 DN .
Entering a value less than 4096 will cause the camera to not
be able to digitally saturate.
On the monochrome models, use the all tap setting (0) to
adjust the overall digital gain.
On a color camera, each individual color can be adjusted. For
example, imagine the red pixels give the strongest signal.
White balancing can be achieved by imaging a white target,
such as a white ceramic tile, and gaining up green and blue
such that their output signal matches red.
Related Commands:
ssb
Example:
ssg 0 5000
Setting Digital System Gain
Teledyne DALSA 03-032-20044-03
Page 60

Falcon 4M Camera Manual
60
Purpose:
Use this command to set the base test pattern used in svm 10,
which in turn is responsible for displaying the PRNU coefficient
map.
Syntax:
tpv m
Syntax Elements:
m
Test pattern base level: 63, 127, or 255 DN
Notes:
This command determines the base level for the test pattern
used in svm 10. When all the PRNU coefficients are unified in
gain the test pattern in svm will display this base level. For
example, when tpv 127 is command ed, the base level in svm
10 will be 127 DN. In this case, to obtain the PRNU coefficient
multiplier for a given pixel, divide the pixel value by 127.The
intention here is to match tpv with the spm setting that was
used during the cpa calibration. This ensures the greatest
accuracy w hen displaying PRNU coefficients and avoids
clipping. For example tpv 63 matches spm 16, tpv 127
matches spm 8, and tpv 255 matches spm 4.
Example:
tpv 127
Setting SVM 10 Base Level
03-032-20044-03 Teledyne DALSA
Page 61

Falcon 4M Camera Manual
61
Purpose: Generates a test pattern to aid in system debugging. The test patterns are useful for verifying proper timing
and connections between the camera and the frame grabber. The following table shows each available test pattern.
Syntax: svm i
Syntax Elements: i
0 Live Video
1 Test pattern checkerboard. One unique value per
color:
Red = 662DN (10 bit), 165DN (8 bit)
Green(Red) = 361DN (10 bit), 90DN (8 bit)
Green(Blue) = 204DN (10 bit), 51DN (8 bit)
Blue = 819DN (10 bit), 204DN (8 bit)
2 Test pattern alternating line 1
3 Test pattern alternating line 2
3.9 Generating a Test Pattern
Teledyne DALSA 03-032-20044-03
Page 62

Falcon 4M Camera Manual
62
4 Test pattern horizontal ramp
8 bit
10 bit
5 Test pattern vertical ramp
8 bit
6 Test pattern diagonal ramp
8 bit
10 bit
03-032-20044-03 Teledyne DALSA
Page 63

Falcon 4M Camera Manual
63
7 FPN test pattern
(Used by Product Support)
8 bit
10 bit
8 FPN and PRNU test pattern
(Used by Product Support)
8 bit
10 bit
9 Fixed at max test pattern
(10 bit = 1023 DN, 8 bit = 255 DN)
Teledyne DALSA 03-032-20044-03
Page 64

Falcon 4M Camera Manual
64
10 PRNU map test pattern
Base level is dependent on STP command (either 63, 127,
or 255 DN in 10 bit). PRNU correction is applied
automatically by this test patter (epc 0 1) in order to
see the PRNU coefficient map of the CSN set being used.
11 Fixed dark (0DN) test pattern
12 FPN map test pattern
Displays the FPN coefficients in each pixel. They
range from 0 to 1023. This is your FPN coefficient map
of the coefficient set you are currently using (csn).
Note:
When switching the camera from video mode (svm 0) to one of the test pattern modes (svm 1 thru 8) the
camera adjusts any digital gain (ssg), background subtract (ssb ), and settings currently being used. The gcp
screen does not turn off these settings and it displays the settings used prior to switching to test pattern mode.
When returning to video mode (svm 0), the digital gain, background subtract, and exposure control settings are
returned to their prior state.
Currently, the test patterns are intended for monochrome imaging. If color interpolation is applied on these test
patterns, you should expect that artifacts near white to dark transitions, such as for test patterns involving ramps.
Example: svm 2
03-032-20044-03 Teledyne DALSA
Page 65

Falcon 4M Camera Manual
65
Optical and Mechanical
Considerations
4.1 Mechanical Interface
Figure 21: Camera Mechanical Dimensions (all models)
4
Please note: For optimal camera performance, the camera should be cooled by applying forced air flow or by attaching the camera to a heatsink. If a heatsink is attached,
the optimal surface is the top of the camera. Teledyne DALSA accessory part number AC-MS-0102 provides heatsinks that will attach to two sides of the camera to provide
additional cooling.
Teledyne DALSA 03-032-20044-03
Page 66

Falcon 4M Camera Manual
66
Configuration
Flange Back Focal Length (sensor die to adapter)
M42
6.56 ±0.25 mm
F-Mount
46.50 ±0.25 mm
C-Mount*
17.52 ±0.25 mm
Configuration
Flange Back Focal Length (sensor die to adapter)
M42
6.56 ±0.25 mm
F-Mount
46.50 ±0.25 mm .
C-Mount
N/ A
4.2 Lens Mounts
Monochrome Models
*Note that the use of a C-Mount lens requires a C-mount adapter, and may cause
vignetting due to the size of the image sensor.
Color Models
4.3 Optical Interface
Illumination
The amount and wavelengths of light required to capture useful images depend s on the
particular application. Factors include the nature, speed, and spectral characteristics of
objects being imaged, exposure times, light source characteristics, environmental and
acquisition system specifics, and more. Links on the Knowledge Center page or our Web
site, here, provide an introd u ction to this potentially com p licated issue. See ―Rad iom etry
an d Ph oto Resp onsiv ity‖ an d "Sensitiv it ies in P h otom etric U n its" in the CCD Technology
Primer found under the Application Support link.
It is often more important to consider exposure than illumination. The total amount of
energy (which is related to the total number of photons reaching the sensor) is more
important than the rate at w hich it arrives. For example, 5 J/ cm2 can be achieved by
exposing 5 mW/ cm2 for 1 ms just the same as exposing an intensity of 5 W/ cm2 for 1 s.
Light Sources
Keep these guidelines in mind when setting up your light source:
LED light sources are relatively inexpensive, provide a uniform field, and longer life
span compared to other light sources. However, they also require a camera with
excellent sensitivity.
Halogen light sources generally provide very little blue relative to IR.
Fiber-optic light distribution systems generally transmit very little blue relative to IR.
03-032-20044-03 Teledyne DALSA
Page 67

Falcon 4M Camera Manual
67
m
h
h
Where m is the m agnification , h ‘ is the im age heigh t
(pixel size) and h is the object height (desired object
resolution size).
m
f
OD
Some light sources age; over their life span they produce less light. This aging may
not be uniform—a light source may produce progressively less light in some areas of
the spectrum but not others.
Filters
Digital cameras are extremely responsive to infrared (IR) wavelengths of light. To prevent
infrared light from distorting the images you scan , u se a ―hot m irror‖ or IR cu toff filter
that transmits visible wavelengths but does not transmit wavelengths over 750 nm.
An IR cut-off filter is recommended in order to improve color imaging performance, as,
in the near-IR, all the color filters allow lig h t to p a ss throu g h w hich can resu lt in ‗wash ed ou t‘ colors.
We recommend use of a SP700 IR-filter to remove unwanted IR signal that could affect
color reproduction.
Lens Modeling
Any lens surrounded by air can be modeled for camera purposes using three primary
points: the first and second principal points and the second focal point. The primary
points for a lens should be available from the lens data sheet or from the lens
manufacturer. Primed quantities denote characteristics of the image side of the lens. That
is, h is the object height and h is the image height.
The focal point is the point at which the image of an infinitely distant object is brought to
focus. The effective focal length (f) is the distance from the second principal point to the
second focal point. The back focal length (BFL) is the distance from the image side of the
lens surface to the second focal point. The object distance (OD) is the distance from the first
principal point to the object.
Figure 22: Primary Points in a Lens System
Magnification and Resolution
The magnification of a lens is the ratio of the image size to the object size:
By similar triangles, the magnification is alternatively given by:
Teledyne DALSA 03-032-20044-03
Page 68

Falcon 4M Camera Manual
68
h
hfOD
This is the governing equation for many object and
image plane parameters.
10
100
45
450 0 450
m
mmmOD
OD mm m ( . )
These equations can be combined to give their most useful form:
Example: An acquisition system has a 512 x 512 element, 10m pixel pitch area scan camera,
a lens with an effective focal length of 45 mm, and requires that 100m in the object space
correspond to each pixel in the image sensor. Using the preceding equation, the object
distance must be 450 mm (0.450 m).
03-032-20044-03 Teledyne DALSA
Page 69

Falcon 4M Camera Manual
69
power supplies
cabling
frame grabber hardware &
software
host computer
light sources
optics
operating environment
encoder
Troubleshooting
The information in this chapter can help you solve problems that may occur during the
setup of your camera. Remember that the camera is part of the entire acquisition system.
You may have to troubleshoot any or all of the following:
5
Your steps in dealing with a technical problem should be to try the general and specific
solutions listed in this section first. If these solutions do not resolve your problem, see
section 5.4 on getting product support.
5.1 Common Solutions
Connections
The first step in troubleshooting is to verify that your camera has all the correct
connections.
Power Supply Voltages
Check for the presence of all voltages at the camera power connector. Verify the connector
pinout and that all grounds are connected. Refer to section 2.2.3 Power Connector for
details.
Note: Avoid hot plugging long power cables into the camera.
Data Clocking/Output Signals
To validate cable integrity, have the camera send out a test pattern and verify it is being
properly received. Refer to section 3.9 Generating a Test Pattern for further information
on running test patterns.
Teledyne DALSA 03-032-20044-03
Page 70

Falcon 4M Camera Manual
70
5.2 Troubleshooting Using the Serial Interface
Communications
To quickly verify serial communications send the h (help) command. By sending the h
and receiving the help menu, the serial communications are verified. If further problems
persist, review Appendix B for more information on communications.
Verify Parameters
To verify the camera setup, send the gcp (get camera parameters) command. To retrieve
valid parameter ranges, send the h (help) command.
Verify Factory Calibrated Settings
To restore the ca m era‘s factory settings send the rfs command. To restore the ca m era‘s
factory calibrated FFC coefficients, first pick the appropriate set (csn 0 to 7) and then
send lpc to load said set.
After executing this command send the gcp command to verify the factory settings.
Verify Timing and Digital Video Path
Use the test pattern feature to verify the proper timing and connections between the
camera and the frame grabber and verify the proper output along the digital processing
chain.
5.3 Specific Solutions
No Output or Erratic Behavior
If your camera provides no output or behaves erratically, it may be picking up random
noise from long cables acting as antennae. Do not attach wires to unused pins. Verify that
the camera is not receiving spurious inputs (e.g. EXSYNC, if camera is using an internal
signal for synchronization).
Line Dropout, Bright Lines, or Incorrect Frame rate
Verify that the frequency of the internal sync is set correctly.
Noisy Output
Check your power supply voltage outputs for noise. Noise present on these lines can
result in poor video quality. Low quality or non-twisted pair cable can also add noise to
the video output.
03-032-20044-03 Teledyne DALSA
Page 71

Falcon 4M Camera Manual
71
Dark Patches
If dark patches appear in your output the optics path may have become contaminated.
Clean your lenses and sensor windows with extreme care.
1. Take standard ESD precautions.
2. Wear latex gloves or finger cots
3. Blow off dust using dry, filtered compressed air. ‗Canned ‘ air can cau se d rop lets to be
deposited on the window which may result in visible spots after they dry.
4. Fold a piece of optical lens cleaning tissue (approx. 3" x 5") to make a square pad that
is approximately one finger-width
5. Moisten the pad on one edge with 2-3 drops of clean solvent (alcohol). Do not
saturate the entire pad with solvent.
6. Wipe across the length of the window in one direction with the moistened end first,
followed by the rest of the pad. The dry part of the pad should follow the moistened
end. The goal is to prevent solvent from evaporating from the window surface, as this
will end up leaving residue and streaking behind.
7. Repeat steps 2-4 using a clean tissue until the entire window has been cleaned.
5. Blow off any adhering fibers or particles using dry, filtered compressed air.
Teledyne DALSA 03-032-20044-03
Page 72

Falcon 4M Camera Manual
72
Customer name
Organization name
Customer phone number
fax number
Complete Product Model
Number
(e.g. PT-41-04M60...)
Complete Camera Serial
Number
Your Agent or Dealer
Acquisition System hardware
(frame grabber, host computer,
light sources, etc.)
Acquisition System software
(version, OS, etc.)
Power supplies and current
draw
Data rate used
Control signals used in your
application, and their frequency
or state (if applicable)
EXSYNC BIN
MCLK Other _______
Results when you run the gcp
command
please attach text received from the camera after initiating
the command
Detailed description of problem
encountered.
please attach description with as much detail as appropriate
North America
Europe
Asia
Voice:
519-886-6000
+49-8142-46770
519-886-6000
Fax:
519-886-8023
+49-8142-467746
519-886-8023
5.4 Product Support
If there is a problem with your camera, collect the following data about your application
and situation and call your Teledyne DALSA representative.
Note: You may also want to photocopy this page to fax to Teledyne DALSA.
In addition to your local Teledyne DALSA representative, you may need to call Teledyne
DALSA Technical Sales Support:
03-032-20044-03 Teledyne DALSA
Page 73

Falcon 4M Camera Manual
73
Camera Link™ Reference,
Timing, and Configuration Table
Camera Link is a communication interface for vision applications. It provides a
connectivity standard between cameras and frame grabbers. A standard cable connection
will red u ce m an u facturers‘ su p por t tim e an d gr eatly red u ce the level of com p lexit y and
time needed for customers to successfully integrate high speed cameras with frame
grabbers. This is particularly relevant as signal and data transmissions increase both in
complexity and throughput. A standard cable/ connector assembly will also enable
customers to take advantage of volume pricing, thus reducing costs.
The camera link standard is intended to be extremely flexible in order to meet the needs
of different camera and frame grabber manufacturers.
Appendix A
The Camera Link Implementation Road Map (available from the Knowledge Center page,
here) details how our cameras standardize their use of the Camera Link interface.
LVDS Technical Description
Low Voltage Differential Signaling (LVDS) is a high-speed, low-power general purpose
interface standard. The standard, known as ANSI/ TIA/ EIA-644, was approved in March
1996. LVDS uses differential signaling, with a nominal signal swing of 350mV differential.
The low signal swing decreases rise and fall times to achieve a theoretical maximum
transmission rate of 1.923 Gbps into a loss-less medium. The low signal swing also means
that the standard is not dependent on a particular supply voltage. LVDS uses current mode drivers, which limit power consumption. The differential signals are immune to ±1
V common mode noise.
Camera Signal Requirements
This section provides definitions for the signals used in the Camera Link interface. The
standard Camera Link cable provides camera control signals, serial communication, and
video data.
Video Data
The Channel Link technology is integral to the transmission of video data. Image data and
image enable signals are transmitted on the Channel Link bus. Four enable signals are
defined as:
• FVAL—Frame Valid (FVAL) is defined HIGH for valid lines.
• LVAL—Line Valid (LVAL) is defined HIGH for valid pixels.
Teledyne DALSA 03-032-20044-03
Page 74

Falcon 4M Camera Manual
74
4M Falcon Cameras
Camera Link
Name
EXSYNC
CC1
Reserved for future use
CC2
Reserved for future use
CC3
Window Toggle
CC4
• DVAL—Data Valid (DVAL) is defined HIGH when data is valid.
• Spa re— A spare has been defined for future use.
All four enable signals must be provided by the camera on each Channel Link chip. All
unused data bits must be tied to a known value by the camera. For more information on
image data bit allocations, refer to the official Camera Link specification from the
Knowledge Center page on our Web site, here.
Camera Control Signals
Four LVDS pairs are reserved for general-purpose camera control. They are defined as
camera inputs and frame grabber outputs. Camera manufacturers can define these signals
to meet their needs for a particular product.
All four enable signals must be provided by the camera on each Channel Link chip. All
unused data bits must be tied to a known value by the camera. For more information on
image data bit allocations, refer to the official Camera Link specification from the
Knowledge Center page on our Web site, here.
Camera Control Configuration
Communication
Two LVDS pairs have been allocated for asynchronous serial communication to and from
the camera and frame grabber. Cameras and frame grabbers should support at least 9600
baud. These signals are
• SerTFG—Differential pair with serial communications to the frame grabber.
• SerTC—Differential pair with serial communications to the camera.
The serial interface will have the following characteristics: one start bit, one stop bit, no
parity, and no handshaking. It is recommended that frame grabber manufacturers supply
both a user interface and a software application programming interface (API) for using
the asynchronous serial communication port. The user interface will consist of a terminal
program with minimal capabilities of sending and receiving a character string and
sending a file of bytes. The software API will provide functions to enumerate boards and
send or receive a character string. See Appendix B in the Official Camera Link
specification available from the Knowledge Center page on our Web site, here.
Power
Power will not be provided on the Camera Link connector. The camera will receive power
through a separate cable. Camera manufacturers will define their own power connector,
current, and voltage requirements.
03-032-20044-03 Teledyne DALSA
Page 75

Falcon 4M Camera Manual
75
User Exsync
FVAL
twSYNC twSYNC_INT
tFRAME PERIOD
tTRANSFER tREADOUT tOVERHEAD
User Exsync
Internal Exsync
Exposure
FVAL
B4A
DC
E
Exposure Timing: SEM 2, 4
User Exsync
Internal Exsync
Exposure
FVAL
B6
D
C
E
Exposure Timing: SEM 6
IMPORTANT:
This camera uses the
falling
edge of EXSYNC
to trigger line readout,
unlike previous DALSA
cameras, which used the
rising edge.
Camera Link Video Timing
Figure 23: Standard Timing (Input and Output Relationships)
Exposure Timing
Note: User EXSYNC not present in sem 2.
Teledyne DALSA 03-032-20044-03
Page 76

Falcon 4M Camera Manual
76
User Exsync
FVAL
K
F*
H1LVAL H2
G J
FVAL / LVAL Timing
L
03-032-20044-03 Teledyne DALSA
Page 77

Falcon 4M Camera Manual
77
Operating Conditions SEM
EDC
CLM
SOT
SSF 2
frame rate - ext controlled 4,6
SET 2
SET 6
EFD
0 1 2 0 1 2 0 1 2 0 1 2
Exposure Timing
A User Exsync ↑ to Internal Exsync ↑ 4 85n 186n 485u 85n 186n 559u 85n 186n 502u 85n 186n 594u
B4 User Exsync ↓ to Internal Exsync ↓ 4 123n 486u 247n 123n 560u 247n 123n 504u 247n 123n 594u 247n
B6 User Exsync ↓ to Internal Exsync ↑ 6 123n 286n 484u 123n 286n 558u 123n 286n 502u 123n 286n 594u
C Internal Exsync ↑ to Exposure ↑ 2,4,6 1.40u 1.40u 1.40u 1.40u
D Internal Exsync ↓ to Exposure ↓ 2,4,6
E Exposure ↓ to FVAL ↑ 2,4,6
LVAL / FVAL Timing
F4 User Exsync ↓ to FVAL ↑ 4 60.2u 546u 60.2u 60.2u 546u 60.2u 73.4u 578u 73.4u 142u 736u 142u
F6 User Exsync ↓ to FVAL ↑ 6 2.54m 2.67m 2.55m 2.73m
tFL, G FVAL ↑ to LVAL ↑ 2,4,6
tLVAL_LOW1, H1 LVAL ↓ to LVAL ↑ (LVAL low 1) 2,4,6
tLVAL_LOW2, H2 LVAL ↓ to LVAL ↑ (LVAL low 2) 2,4,6
tLF, J LVAL ↓ to FVAL ↓ 2,4,6
tLINE, K LVAL ↑ to LVAL ↓ 2,4,6
tREADOUT, L FVAL ↑ to FVAL ↓ 2,4,6
Max Frame Rate Timing
SSF (max FR) 2 62.2Hz 60.4Hz 60.3Hz 31.1Hz 30.6Hz 30.6Hz 50.3Hz 49Hz 49Hz 25.2Hz 24.9Hz 24.9Hz
Max Exposure 2 16051u 16530u 52u 32109u 32635u 32u 19850u 20377u 49u 39629u 40107u 31u
twSYNC Internal Exsync ↓ to Internal Exsync ↑ 2 16.6m 32.6m 20.4m 40.2m
twSYNC_INT Internal Exsync ↑ to Internal Exsync ↓ (min) 2 10u 492u 10u 10u 566u 10u 10u 510u 10u 10u 601u 10u
tTRANSFER Internal Exsync ↓ to FVAL ↑ 2
tOVERHEAD FVAL ↓ to Internal Exsync ↓ (max FR) 2 24.2u 504u 532u 42.2u 568u 568u 13.5u 542u 542u 115u 594u 594u
tFRAME PERIOD Internal Exsync ↓ to Internal Exsync ↓ 2 16.07m 16.55m 16.58m 32.16m 32.68m 32.68m 19.89m 20.42m 20.42m 39.68m 40.16m 40.16m
0
0
1.87u
3.78u
2.30u
4.66u
1.94u
3.82u
2.50u
4.76u
2.06m
2.10m
2.06m
2.14m
3.11u
57.0u
112u
70.2u
138u
2000
686
2000
200052000
566
2000
6015028.85023.7
320
160
260
130
112n
112n
112n
112n01631637.35u
14.7u
9.04u
18.1u
15.99m
32.00m
19.8m
39.42m
29.2u
47.8u
33.7u
56.4u
60.2u
116u
73.4u
142u
Original Falcon 4M30 and 4M60 User Timing (-00-R and non-RoHS cameras)
Notes:
* Units in seconds.
* Additional operating conditions: full window readout, snd 1.
* User EXSYNC operates asynchronous to the camera timing and therefore has an uncertainty period of +/-2 clocks (80 MHz clock
= 12.5 nS, 2 clocks = ± 25 nS).
* When the debounce circuit is enabled (edc 1) increase timing values A, B4, B6, F4 and F6 by 1.07 µs.
Teledyne DALSA 03-032-20044-03
Page 78

Falcon 4M Camera Manual
78
Operating Conditions SEM
EDC
CLM
SOT
SSF 2
frame rate - ext controlled 4,6
SET 2
SET 6
EFD
0 1 2 0 1 2 0 1 2 0 1 2
Exposure Timing
A User Exsync ↑ to Internal Exsync ↑ 4 149n 249n 485u 149n 249n 559u 149n 249n 485u 149n 249n 594u
B4 User Exsync ↓ to Internal Exsync ↓ 4 186n 486u 311n 186n 560u 311n 186n 486u 311n 186n 594u 311n
B6 User Exsync ↓ to Internal Exsync ↑ 6 237n 337n 484u 237n 337n 558u 237n 337n 484u 237n 337n 594u
C Internal Exsync ↑ to Exposure ↑ 2,4,6 1.40u 1.40u 1.40u 1.40u
D Internal Exsync ↓ to Exposure ↓ 2,4,6
E Exposure ↓ to FVAL ↑ 2,4,6
LVAL / FVAL Timing
F4 User Exsync ↓ to FVAL ↑ 4 84u 570u 84u 140u 700u 140u 84u 570u 84u 167u 762u 167u
F6 User Exsync ↓ to FVAL ↑ 6 2.56m 2.70m 2.56m 2.75m
tFL, G FVAL ↑ to LVAL ↑ 2,4,6
tLVAL_LOW1, H1 LVAL ↓ to LVAL ↑ (LVAL low 1) 2,4,6
tLVAL_LOW2, H2 LVAL ↓ to LVAL ↑ (LVAL low 2) 2,4,6
tLF, J LVAL ↓ to FVAL ↓ 2,4,6
tLINE, K LVAL ↑ to LVAL ↓ 2,4,6
tREADOUT, L FVAL ↑ to FVAL ↓ 2,4,6
Max Frame Rate Timing
SSF (max FR) 2 62.2Hz 60.4Hz 60.3Hz 31.1Hz 30.6Hz 30.6Hz 62.2Hz 60.4Hz 60.3Hz 25.2Hz 24.9Hz 24.9Hz
Max Exposure 2 16051u 16530u 52u 32109u 32635u 32u 16051u 16530u 52u 39629u 40107u 31u
twSYNC Internal Exsync ↓ to Internal Exsync ↑ 2 16.6m 32.6m 16.6m 40.2m
twSYNC_INT Internal Exsync ↑ to Internal Exsync ↓ (min) 2 10u 492u 10u 10u 566u 10u 10u 492u 10u 10u 601u 10u
tTRANSFER Internal Exsync ↓ to FVAL ↑ 2
tOVERHEAD FVAL ↓ to Internal Exsync ↓ (max FR) 2 2.05u 482u 510u 21.8u 548u 548u -1.4u 478u 506u 94.4u 574u 574u
tFRAME PERIOD Internal Exsync ↓ to Internal Exsync ↓ 2 16.08m 16.56m 16.58m 32.16m 32.69m 32.69m 16.07m 16.55m 16.58m 39.68m 40.16m 40.16m
84.2u
140u
84.2u
167u
130
23.752000
566
2000
601
2605028.8
50
29.2u
47.8u
29.2u
56.4u
15.99m
32.00m
15.99m
39.42m
7.35u
14.7u
9.04u
18.1u
2.08m
2.16m
0
0
100n
123n
3.70u
7.52u
292n
9.32u
320
160
2.07m
2.13m016316
3
3.11u
80.9u
136u
80.8u
164u
109n
109n
109n
109n
2000
686
2000
2000
Revised Falcon 4M30 and 4M60 User Timing (-01-R and higher cameras)
Notes:
* Units in seconds.
* Additional operating conditions: full window readout, snd 1.
* User EXSYNC operates asynchronous to the camera timing and therefore has an uncertainty period of +/-2 clocks (80 MHz clock
= 12.5 nS, 2 clocks = ± 25 nS).
* When the debounce circuit is enabled (edc 1) increase timing values A, B4, B6, F4 and F6 by 1.07 µs.
03-032-20044-03 Teledyne DALSA
Page 79

Falcon 4M Camera Manual
79
Command
Syntax
Parameters
Description
correction calibrate
FPN
ccf
Performs FPN calibration and
eliminates FPN noise by subtracting
away individual pixel dark current.
camera link mode
clm
m
Output mode to use:
2: Base configuration, 2 taps, 8 bit
output
3: Base configuration, 2 taps, 10 bit
output
15: Medium configuration, 4 taps, 8 bit
output (4M60 only)
16: Medium configuration, 4 taps, 10 bit
output (4M60 only)
calculate PRNU
algorithm
cpa
i i
Performs PRNU calibration according
to the selected algorithm.
The first parameter is the algorithm
where i is:
2 = Calculates the PRNU coefficients
using the entered target value
PRNU Coefficient =
Target
(AVG Pixel Value ) - (FPN + value)sdo
i
i
i
This algorithm is useful for achieving
uniform output across multiple
cameras.
Parameters:
t = tap id
i = integer value
f = real number
s = string
m = member of a set
Error Handling and
Command List
B1 All Available Commands
As a quick reference, the following table lists all of the commands available to th e camera
user. For detailed information on using these commands, refer to Chapter 3.
All Available Commands
Appendix B
Teledyne DALSA 03-032-20044-03
Page 80

Falcon 4M Camera Manual
80
Command
Syntax
Parameters
Description
coefficient set
number
csn
i
Selects the coefficient set to use:
0-2 = Factory calibrated sets of FPN
and PRNU coefficients. These
coefficients cannot be erased or
modified .
3-5 = User calibrated sets of FPN and
PRNU coefficients. These coefficients
can be deleted or modified.
CSN
EFD
0, 3 1 1, 4 0 2, 5
2
calibration sample
size
css
m
Sets the number of lines to sample
when performing FPN and PRNU
calibration where m is 32, 64, 128
(factory setting), 256, 512, or 1024
display pixel
coefficients
dpc
x1y1 x2y2
Displays the pixels coefficients in the
ord er FPN , PRN U, FPN, PRN U…
x1y1 = pixel start address
x2y2 = pixel end address
in the range from 1, 1 to 2352, 1728.
enable debounce
circuit
edc
m
When enabled (EDC 1) filters EXSYNC
from the user to suppress any glitches
less than 1us in width.
enable frame dump
efd
m
Enables various snapshot modes
EFD 0 – snapshot mode disabled
EFD 1 – snapshot mode 1, FFD on
falling edge of EXSYNC
EFD 2 – snapshot mode 2, FFD on rising
edge of EXSYNC
enable pixel
coefficients
epc
i i
Enables or disables FPN and PRNU
coefficients.
The first parameter sets the FPN
coefficients where i is:
0 = FPN coefficients disabled
1 = FPN coefficients enabled
The second parameter sets the PRNU
coefficients where i is:
0 = PRNU coefficients disabled
1 = PRNU coefficients enabled
get camera model
gcm
Read the camera model number.
get camera
parameters
gcp
Read all of the camera parameters.
get camera serial
gcs
Read the camera serial number.
get camera version
gcv
Read the firmw are version and FPGA
version.
get fpn coefficient
gfc
xy
Read the FPN coefficient at address xy,
where xy falls in the range from 1, 1 to
2352, 1728.
Parameters:
t = tap id
i = integer value
f = real number
s = string
m = member of a set
03-032-20044-03 Teledyne DALSA
Page 81

Falcon 4M Camera Manual
81
Command
Syntax
Parameters
Description
get prnu coefficient
gpc
xy
Read the PRNU coefficient at address
xy, where xy falls in the range from 1, 1
to 2352, 1728.
get command
parameter
get
s
Display value of camera commands
get sync frequency
gsf
m
Display the frequency and HIGH time
of CC1-CC4.
1: Camera Link input (CC1)
4: Camera Link input (CC4)
help
h
Display the online help
load pixel
coefficients
lpc
Loads the previously saved pixel
coefficients from non-volatile memory
determined by the csn value.
0-2 = Factory calibrated coefficients
3-5 = User coefficient sets
reset camera
rc
Reset the entire camera (reboot).
restore factory
settings
rfs
Restore th e cam era‘s factor y settings.
Note: this does NOT restore factory
FFC coefficients (use lpc for this).
reset pixel
coefficients
rpc
Resets the FPN and PRNU coefficients
to 0/ 1 respectively.
restore user
settings
rus
Restore th e cam era‘s la st saved user
settings. Note: this does NOT restore
FFC coefficients (use lpc for this).
set analog offset
sao
t i
Set the analog offset.
t = Tap selection. Allow able value is 0
for all taps.
i = Analog offset value. Allowable
range is 0 -511.
set baud rate
sbr
m
Set the speed of the serial
communication port. Baud rates: 9600,
19200, 57600, and 115200. Default
baud: 9600
set digital offset
sdo
t i
Used as a substitute when no FPN
correction is performed. Not
recommended in general.
t = Tap selection. Allow able value is 0
for all taps.
i = Offset in the range from 0 to 1023
set exposure mode
sem
m
Set the exposure mode. Available
values are:
2: Internal programmable frame rate
and exposure time using commands
ssf and set
4: Smart EXSYNC, frame rate and
exposure time controlled by CC1
(user EXSYNC)
6: Frame rate controlled by CC1,
exposure time controlled by set
Parameters:
t = tap id
i = integer value
f = real number
s = string
m = member of a set
Teledyne DALSA 03-032-20044-03
Page 82

Falcon 4M Camera Manual
82
Command
Syntax
Parameters
Description
set exposure time
set
f
Sets the exposure time to a floating
point number in µs. Allowable range
depends on snapshot mode, window
size, camera link mode, etc..
set fpn coefficient
sfc
xyi
Set the FPN coefficient.
where xy falls in the range from 1, 1 to
2352, 1728.
i= FPN value in the range 0 to 1023.
set number frame
dumps
snd
i
Sets the number of fast frame dumps
when either snapshot modes 1 or 2 are
active (efd 1 or 2, respectively).
set output
throughput
sot
m
Sets the camera's total throughput in
mega-pixels per second. Valid values
are: 130, 160, 260 and 320.
set prnu coefficient
spc
xyi
Set the PRNU coefficient.
Where xy falls in the range from 1, 1 to
2352, 1728.
i= PRNU value in the range 0 to
12287.
set prnu multiplier
spm
m
Sets the maximum PRNU multiplier
(4/ 8/ 16) which will be reached before
the CPA routine clips to max.
set subtract
background
ssb
ti
Subtract this value from the output
signal.
t = Tap selection. Allow able value is 0
for all taps.
i = Subtracted value in a range from 0
to 511.
set sync frequency
ssf
f
Sets the frame rate in Hz to a value
from 1 to 60.4 (4M60) or 1 to 30.6
(4M30).
set system gain
ssg
t i
Sets the digital gain.
t = Tap selection. Allow able value is 0
for all taps.
i = Gain value is specified from 0 to
65535. The digital video values are
multiplied by this number.
Parameters:
t = tap id
i = integer value
f = real number
s = string
m = member of a set
03-032-20044-03 Teledyne DALSA
Page 83

Falcon 4M Camera Manual
83
Command
Syntax
Parameters
Description
set video mode
svm
m
Sets th e cam era‘s vid eo mod e.
0: Video mode
1: Test pattern checkerboard
2: Test pattern alternating line 1
3: Test pattern alternating line 2
4: Test pattern horizontal ramp
5: Test pattern vertical ramp
6: Test pattern diagonal ramp
7: Test pattern FPN
8: Test pattern PRNU
9: Test pattern fixed 1023
10: Test pattern PRNU map
11: Test pattern fixed 0
12: Test pattern FPN map
test pattern value
tpv
i
Sets the base value (63/ 127/ 255) for
svm 10. A PRNU map results when this
base value is multiplied by individual
PRNU coefficients.
verify temperature
vt
Display the internal temperature of the
camera.
verify voltage
vv
Display some internal voltages
supplied to the camera.
write fpn
coefficients
wfc
Write current FPN coefficients to nonvolatile memory. The set within nonvolatile memory will have been
previously selected using the csn
command.
write prnu
coefficients
wpc
Write current PRNU coefficients to nonvolatile memory. The set within nonvolatile memory will have been
previously selected using the csn
command.
Parameters:
t = tap id
i = integer value
f = real number
s = string
m = member of a set
Teledyne DALSA 03-032-20044-03
Page 84

Falcon 4M Camera Manual
84
Command
Syntax
Parameters
Description
window start end
wse
i i x1 y1
x2 y2
Sets the window start and stop pixels
where:
i is the window sequence id. It is
always 0 in this camera.
i is the number of windows to set. It is
always 1 in this camera.
x1 is window start corner value. Since
there is only vertical window of interest
in this camera, this value is always set
to 1.
y1 is window start pixel number in a
range from 1-1725 and must belong to
follo w ing set: 1, 5, 9, …1725
x2 is window end corner value. Since
there is only vertical window of interest
in this camera, this value is always set
to 2352.
y2 is window end pixel number in
range from 4-1728 and must belong to
th e follow ing set: 4, 8, 12, …1728
window set
sequence
wss
i
Toggles the current wind ow sequence
when switching between wss 0 and
wss 1 or vice versa.
window trigger
source
wts
m
Defines the source for the window
sequence. Available values are:
1: Software command wss
2: Camera Link input (CC4)
write user settings
wus
Write all of the user settings to nonvolatile memory.
Parameters:
t = tap id
i = integer value
f = real number
s = string
m = member of a set
03-032-20044-03 Teledyne DALSA
Page 85

Falcon 4M Camera Manual
85
Model 04M-30-00-R and 04M60-00-R
The 4M cameras meet the following requirements, which satisfy the CE Marking, FCC
Part 15, and Industry Canada ICES-003 requirements:
EN 55022 Class A, IEC 61000-3-2, IEC 61000-3-3, IEC 61000-4-2, IEC 61000-4-3, IEC
61000-4-4, and IEC 61000-4-6
Name and Signature of authorized person
Hank Helmond
Quality Manager, Teledyne DALSA Corp.
EMC Declaration of
Conformity
Teledyne D ALSA‘s 4M30 and 4M60 cameras meet the requirements outlined below which
satisfy the EMC requirements for CE marking, the FCC Part 15 Class A requirements, the
Industry Canada requirements, and the Japanese VCCI requirements.
Appendix C
This equipment has been tested and found to comply with the limits for a Class A digital
device, pursuant to part 15 of the FCC Rules. These limits are designed to provide
reasonable protection against harmful interference when the equipment is operated in a
commercial environment.
This equipment generates, uses, and can radiate radio frequency energy and, if not
installed and used in accordance with the instruction manual, may cause harmful
interference to radio communications. Operation of this equip ment in a residential area is
likely to cause harmful interference in which case the user will be required to correct the
interference at the user's own expense.
Changes or modifications not expressly approved by Teledyne DALSA could void the
user's authority to operate the equipment.
Teledyne DALSA 03-032-20044-03
Page 86

Falcon 4M Camera Manual
86
03-032-20044-03 Teledyne DALSA
Page 87

Falcon 4M Camera Manual
87
Revision
Change Description
Date
00
Preliminary release. RoHS version of manual created from
standard version (03-032-10121-09).
New to this manual:
-Added EMC compliance as Appendix C.
-Removed "Stop Action" from the manual cover and headers,
replaced with "Falcon."
-Added a note concerning Camera Link cable length and quality,
page 17.
-Timing diagrams, sem 2, 4, and 6 revised , page 33.
-RoHS and CE compliant information added.
01
-Added camera cosmetic blemish section, page 10. Please note
that the information in this section is considered "preliminary" at
the time of printing and subject to change.
-Added snapshot mode section, page 37.
-Revised flat field correction description, page 46.
-Revised mechanical drawing, page 65.
02
-Color model information added.
03
-Color QE graph add ed.
-F-mount adapter details removed. No longer available.
-Mechanical diagram revised to show sensor alignment measured
from the tooling holes in the front plate.
Revision History
Appendix D
Teledyne DALSA 03-032-20044-03
Page 88

Falcon 4M Camera Manual
88
03-032-20044-03 Teledyne DALSA
Page 89

Falcon 4M Camera Manual
89
Index
A
analog
offset, 57
analog gains
factory calibrated, 58
antiblooming, 7
applications, 6
B
background subtract, 58
base configuration, 19
baud rate
setting, 24
bright lines, 70
C
cables
quality and length, 17
calibration
errors, 56
overview, 46
results, 56
steps, 46
calibration sample size
selecting, 51
camera
output configuration, 28
camera control signals, 20
camera link
configuration table, 73
reference, 73
timing, 73
Camera Link
configuration, 19, 29, 30
configurations, 19, 20, 28, 29
connector, 19, 20
inputs, 21
mode, 29
outputs, 21
Camera Link mode
setting, 29, 30
camera settings
current, 27
factory, 27
restoring, 27
retrieving, 26
saving, 27
user, 27
clock signals, 21
coefficients, 50
saving, loading, resetting, 55
command
parameters, 23
commands
format, 23
list of, 79
connector
Camera Link, 19
hirose, 21
pow er, 21
connectors, 18
Camera Link, 20
control configuration, 74
control signals, 74
cosmetic specifications
camera, 10
sensor, 9
D
dark patches, 71
data bus, 21
data rate, 7
DC offset, 7
digital
gain, 59
DVAL, 74
dynamic range, 7
E
EIA-644 Reference, 73
electrical specifications, 7
EMC Declaration of
Conformity, 85
exposure correction, 37
disabling, 37
enabling, 37
setting, 37
exposure mode
overview, 32
setting, 32
exposure time
allowable increments, 36
setting, 36
Exsync debounce
enabling, 37
Teledyne DALSA 03-032-20044-03
Page 90

Falcon 4M Camera Manual
90
F
features, 5
fiber-optic light sources, 66
filters, 67
flat field correction, 46
FPN, 46
FPN calibration
performing, 52
frame rate
setting, 35
frame readout time
calculating, 44
FVAL, 73
G
gain, 57
adjustments, 57
digital, 59
H
halogen light sources, 66
help, 24
online, 24
hirose connector, 21
hot mirror, 67
I
illumination, 66
incorrect line rate, 70
input/ output, 18
inputs (user bus), 21
installation, 17
interface
electrical, 7
mechanical, 7, 65
optical, 7, 66
mechanical
interface, 65
specifications, 7
mechanical interface, 65
models, 6
N
noisy output, 70
O
offset, 57
adjustments, 57
online help, 24
operating
modes, 30
ranges, 7
optical interface, 66
optical specifications, 7
P
performance specifications, 11–
13
pixel coefficient information
returning, 56
pixel coefficients
enabling, 51
pixel rate, 28, 29
pixel readout, 11
pow er
connector, 21
connectors, 21
guidelines, 21
PRNU, 46
PRNU calibration
performing, 53
R
L
LED, 18
lens
modeling, 67
mounts, 66
light sources, 66
line d ropout, 70
line rate, 7
LVAL, 73
LVDS, 73
pairs, 74
M
magnification, 67
03-032-20044-03 Teledyne DALSA
random noise, 7
readout, 12
configuring, 27
resolution, 6
responsivity, 7, 13
S
sensor
diagram, 11
readout, 12
specifications, 6
serial communication
reference, 73
serial interface, 23
defaults, 23
Page 91

Falcon 4M Camera Manual
91
settings
factory, 26, 27
restoring, 27
saving, 27
session, 27
user, 27
snapshot
defined, 38
help, 41
modes, 37
software
interface, 23
specifications
electrical, 7
mechanical, 7
operating, 7
optical, 7
sensor, 6
subtracting background , 58
support, 72
T
Technical Sales Support, 72
test pattern, 61
generating, 61
timing
exposure, 36, 75
standard, 75
vid eo, 75
troubleshooting, 69
line rates, 70
serial interface, 70
V
video d ata, 73
W
window of interest
setting, 42
Teledyne DALSA 03-032-20044-03
 Loading...
Loading...