


KA3012D
4-Channel Motor Driver
www.fairchildsemi.com
Features
• BTL (H-Bridge type linear) 4channel motor driver
• Wide dynamic range:
-SV
-SV
• Built in level-shift circuit
• Built in OP-amp for digital input
• Built in thermal shutdown (TSD) circuit
• Three independent sources
• Low crossover distortion
• Built-in reverse rotation prevented
• Built-in short breaker
=12V, PV
CC
=12V, PV
CC
=5V, RL=8Ω → VOM=4.2V
CC1
=12V, RL=24Ω → VOM=10.4V
CC2
Description
The KA3012D is a monolithic IC, and suitable for 4-CH
motor driver which drives sled motor, loading motor, focus
& tracking actuator of CD-media system and built in OPamp which can receive digital signal from servo of CDmedia system.
28-SSOPH-375
Typical Applications
• Compact disk R O M (CD-ROM)
• Compact disk RW (CD-RW)
• Digital video disk ROM (DVD-ROM)
• Digital video disk RAM (DVD-RAM)
• Digital video disk player (DVDP)
• Other compact disk media
©2000 Fairchild Semiconductor International
Ordering Information
Device Package Operating Temp.
KA3012D-02 28-SSOPH-375 -35 °C ~ 85 °C
KA3012D-02TF 28-SSOPH-375 -35 °C ~ 85 °C
Rev. 1.0.1
February. 2000.
1
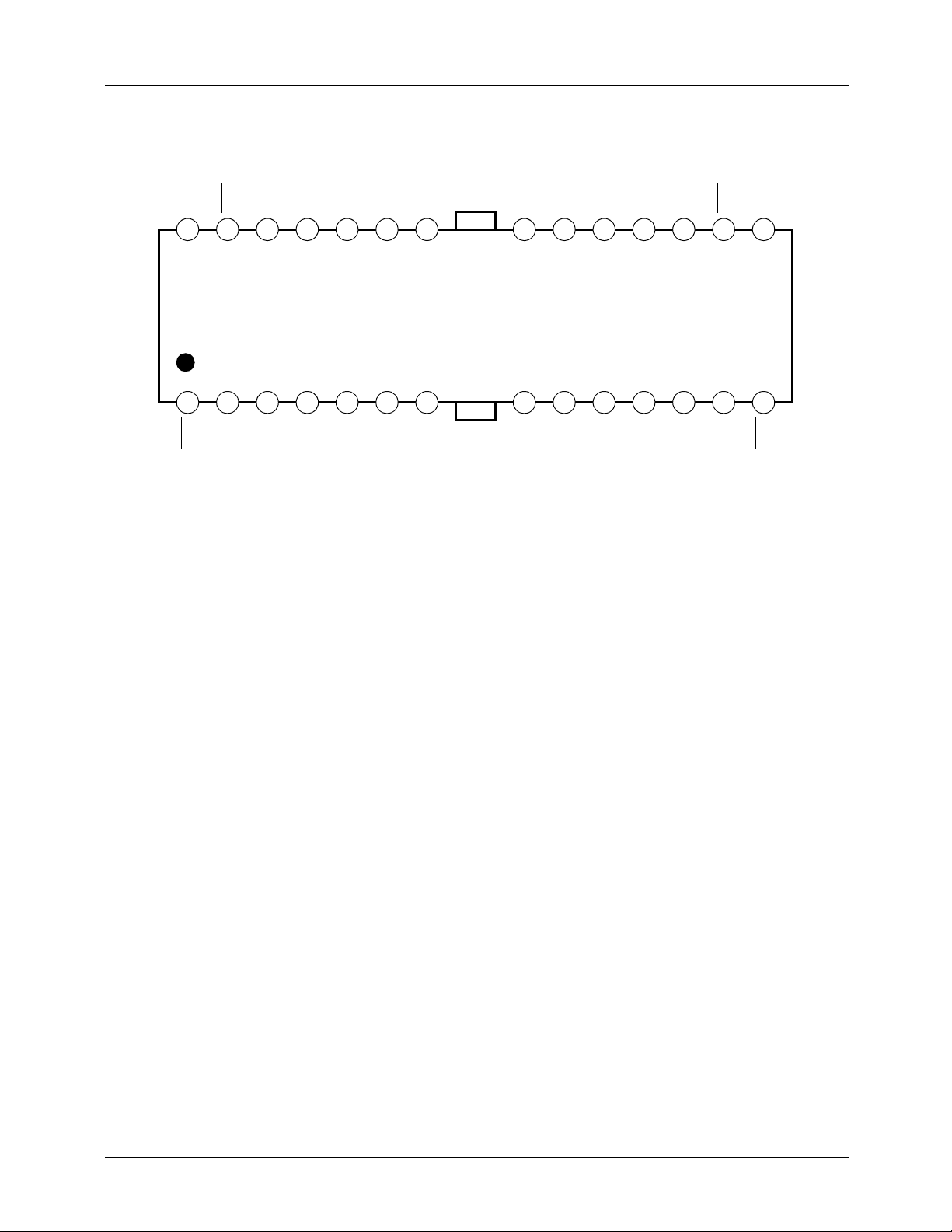
Pin Assignments
GND
CH4-O
1234567 891011121314
CH1-O
CH1-O
KA3012D
FIN
CH4-O
AMP4-O
AMP4-I (−)
AMP4-I (+)
PVCC1
(GND)
PVCC2
AMP3-I (+)
AMP3-O
AMP3-I (−)
CH3-O
CH3-O
GND
1516171819202122232425262728
KA3012D
FIN
SVCC
(GND)
BIAS
AMP1-O
AMP1-I (−)
AMP1-I (+)
GND
MUTE
CH2-O
AMP2-O
AMP2-I (−)
AMP2-I (+)
CH2-O
2
KA3012D
Pin Definitions
Pin Number Pin Name I/O Pin Function Description
1 CH1-O O Drive CH 1 output (−)
2 CH1-O O Drive CH 1 output (+)
3 AMP1-O O Op-amp CH 1 output
4AMP1-I(−) I Op-amp CH 1 input (−)
5 AMP1-I(+) I OP-amp CH 1 input (+)
6 BIAS I Bias input
7 SVCC - Supply voltage (Signal)
8 GND - Ground
9MUTEIMute
10 AMP2-I(+) I OP-amp CH 2 input (+)
11 AMP2-I(−) I Op-amp CH 2 input (−)
12 AMP2-O O Op-amp CH 2 output
13 AMP2-O O OP-amp CH 2 output (+)
14 CH2-O O Op-amp CH 2 output
(Op-amp CH 2 output)
15 GND - Ground
16 CH3-O O Drive CH 3 output (−)
17 CH3-O O Drive CH 3 output (+)
18 AMP3-O O OP-amp CH 3 output
19 AMP3-I(−) I Drive CH 3 input (−)
20 AMP3-I(+) I Drive CH 3 input (+)
21 PVCC2 - Supply voltage (CH 2 & CH 3)
22 PVCC1 - Supply voltage (CH1 & CH 4)
23 AMP4-I(+) I OP-amp CH 4 input (+)
24 AMP4-I(−) I Op-amp CH 4 input (−)
25 AMP4-O O Op-amp CH 4 output
26 CH4-O O Drive CH 4 output (+)
27 CH4-O O Drive CH 4 output (−)
28 GND - Ground
3
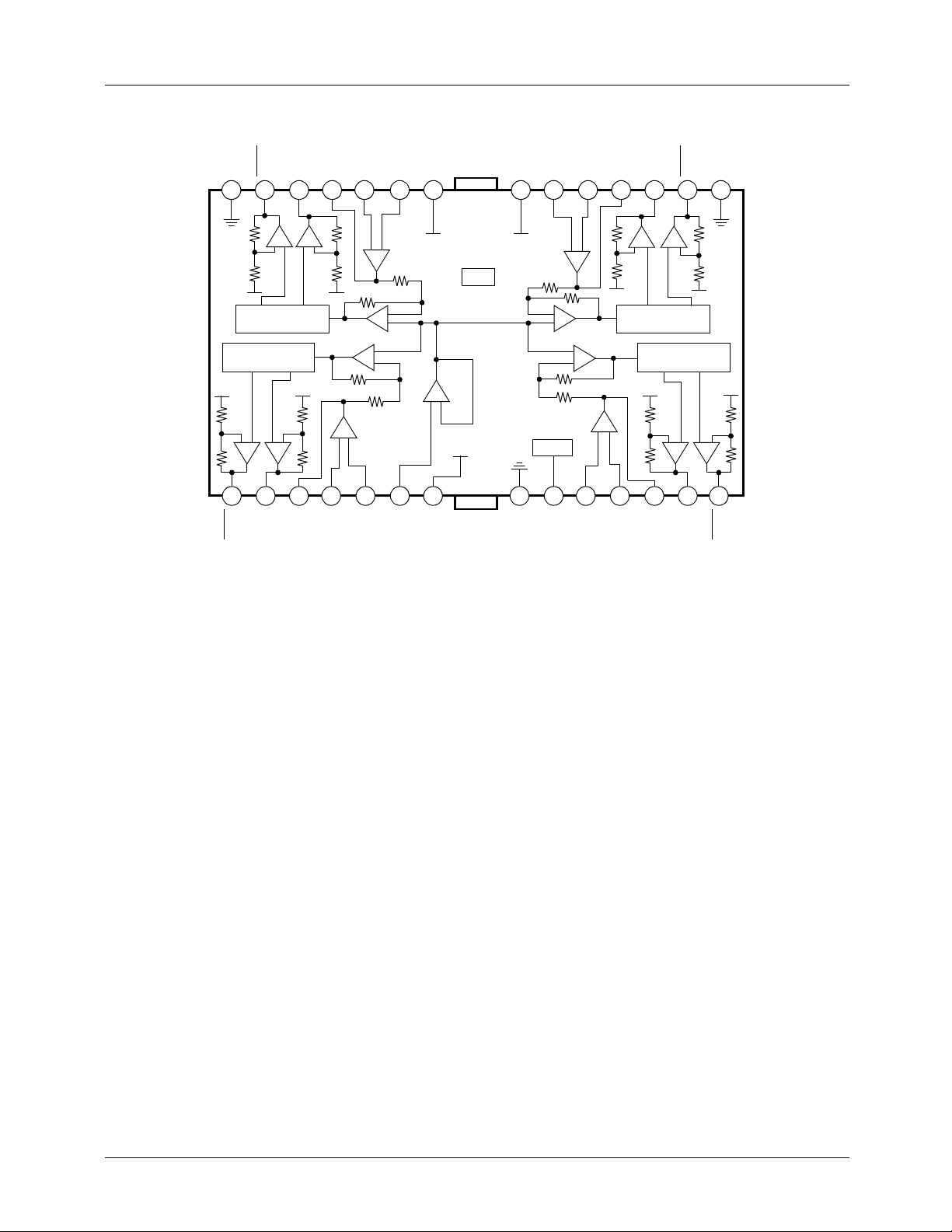
Internal Block Diagram
KA3012D
PVCC1
AMP4-I (+)
AMP4-I (−)
+
10k10k
AMP4-O
CH4-O
PV
10k
BIAS
CC1
+
−
SV
SVCC
−
PV
+
AMP1-O
10k10k
CC1
AMP1-I (−)
− +
−
+
10k
/2
−
+
+
−
10k
10k
AMP1-I (+)
CH4-O
GND
10k 10k
GND
PV
CC1
PV
CC1
10k 10k
1234567 891011121314
CH1-O
+−+
/2
−
LEVEL-SHIFT
LEVEL-SHIFT
−
/2
−−
++
CH1-O
NOTE:
The drive channel outputs are determined pre OP-amp output.
GND
TSD
CC
GND
PV
GND
PVCC2
CC2
GND
AMP3-I (+)
10k
−
+
10k
MUTE
+
20k
20k
MUTE
AMP3-I (−)
10k 10k
++
PV
CC2
+
−
AMP2-I (−)
AMP2-I (+)
−−
/2
+
LEVEL-SHIFT
LEVEL-SHIFT
+
PV
/2
CC2
10k
−
10k
AMP2-O
−
+
−
10k10k
PV
−
−
PV
++
CH2-O
1516171819202122232425262728
GND
CC2
CC2
−
/2
/2
10k10k
CH2-O
GND
CH3-O
CH3-O
AMP3-O
4

KA3012D
Equivalent Circuits
Op-amp input Op-amp output
5, 10, 20, 23
Pin
10kΩ
1kΩ
80Ω
AMP-I (−)AMP-I (+)
4, 11, 19, 24
Pin
80Ω
Drive output Bias
10kΩ
CH-O
(2, 13, 17, 26 Pin)
CH-O
(1, 14, 16, 27 Pin)
Bias
(6 Pin)
Mute
AMP-O
3, 12, 17, 25 Pin
200Ω
Mute
(9 Pin)
50k
50k
5

Absolute Maximum Rating (Ta = 25°C)
Parameter Symbol Value Unit
Supply voltage V
Power dissipation P
Operating temperature range T
Storage temperature range T
CC
D
OPR
STG
NOTE:
1. When mounted on 50mm × 50mm × 1mm PCB (Phenolic resin material).
2. Power dissipation reduces 13.6mW / °C for using above Ta=25°C.
3. Do not exceed P
and SOA (Safe operating area).
D
15 V
note
1.7
−35 ~ +85 °C
−55 ~ +150 °C
Power Dissipation Curv e
Pd (mW)
3,000
2,000
KA3012D
W
1,000
0
0 25 50 75 100 125 150 175
SOA
85
Recommended Operating Condition (Ta = 25°C)
Parameter Symbol Min. Typ. Max. Unit
, V
Supply voltage SV
CC
CC1
V
CC2
,
4.5 - 13.2 V
Ambient temperature, Ta [°C]
6

KA3012D
Electrical Characteristics
(Ta=25°C, V
CC1=VCC2
Parameter Symbol Conditions Min. Typ. Max. Units
DRIVE CIRCUIT
Quiescent current 1 I
Quiescent current 2 I
Output offset voltage 1 V
Output offset voltage 2 V
Max.output amplitude 1 V
Max.output amplitude 2 V
Voltage gain 1 G
Voltage gain 2 G
Mute on voltage V
Mute off voltage V
INPUT OP-AMP CIRCUIT
Input offset voltage V
Input bias current I
High level output voltage V
Low level output voltage V
Output driving current sink I
Output driving current source I
Slew rate SR 100kHz square-wave 2Vp-p output - 1 - V / µs
=5V, RL=8Ω)
CC1
CC2
OO1
OO2
OM1
OM2
VC1
VC2
Mon
Moff
OFOP
BOP
OHOP
OLOP
SINK
SOURCE
No load, Mute off - 15 20 mA
No load, Mute on - - 500 uA
CH 1, CH 4 −70 0 70 mA
CH 2, CH 3 −90 - 90 mV
CH 1, CH 4 3 4.2 - V
CH 2, CH 3 (RL=24Ω) 8 10.4 - V
VIN=0.1V
, 1kHz, sinewave.
RMS
10 12.0 14 dB
Input OP-amp
→ Buffer CH 1, CH 4
VIN=0.1V
, 1kHz, sinewave.
RMS
16 18 20 dB
Input OP-amp
→ Buffer CH 2, CH 3
-2.0--V
---0.5V
- −10 0 10 mV
- - - 300 nA
- 10 10.9 - V
--1.11.8V
Input op-amp output
& 1.2kΩ
→ V
CC
Input op-amp output
1--mA
1--mA
→ GND & 1.2kΩ
7

Application Information
1. MUTE
KA3012D
Pin #9 Mute circuit
High Turn-on
Low Turn-off
9
Output driver
bias
Open Turn-off
• When the voltage level of the mute pin is above 2V, the mute circuit is activated so that the output circuit will be
muted.
• When the mute pin #9 is open or the voltage of the mute pin #9 is below 0.5V, the mute circuit is deactivated and the output
circuit operates normally.
• When the mute circuit is activated, the voltage level of output pins becomes 1/2V
(approximately).
CC
2. TSD (THERMAL SHUTDOWN)
V
REF BG
Output driver
R11
R12
bias
Q11
• If the chip temperature rises above 175°C, then the TSD (Thermal shutdown) circuit is activated and the output circuit is
muted.
•The V
is the output voltage of the band-gap-referenced bias in circuit and acts as the input voltage of the TSD
REF BG
circuit.
• The base-emitter voltage of the TR,Q11 is designed to turn-on at 460mA.
V
BE
= V
REF BG
× R12 / (R11 + R12)=460m V
• When the chip temperature rises up to 175°C, the turn-on volt a g e of the Q11 drops down to 460 mV. (Hysteresis: 25°C) and
Q11 turns on so the output circuit is muted.
8

KA3012D
3. DRIVER
+∆I
Buffer
−∆I
+
−
Buffer
+
−
−∆V+∆V
Q1
CH-O
(1, 14,
16, 27 Pin)
Q3
M
CH-O
(2, 13,
17, 26 Pin)
Q2
Q4
AMP-I (+)
(5, 10, 20, 23 Pin)
AMP-I (−)
(4, 11, 19, 24 Pin)
AMP-O
(3, 12, 18, 25 Pin)
Pre-amp
+
−
BIAS
(6 Pin)
10k
AMP
+
−
10k
Level
shift
• The gain of pre-op. Amplifier can be changed by manipulating amp input resistor or feedback resistor.
• The voltage, V
, is the reference voltage given by the bias voltage of the pin #6.
REF
• The level shift produces the current due to the difference between the pre amp output signal and the arbitrary reference
(bias) signal. (The current produced as +∆I and −∆I is fed into the driver buffer. (CH1/CH4)
The current produced as +2∆I and −2∆I is fed into the driver buffer. (CH2/CH3)
• Driver buffer drives the power TR of the output stage according to the state of the input signal.
• The output stage is the BTL driver and the motor is rotating in forward direction by operating TR Q1 and TR Q4.On the
other hand, if TR Q2 and TR Q3 is operating, the motor is rotating in reverse direction.
• When the output voltage of Pre-Amp (Pin 3, 12, 18, 25) is below the V
• When the output voltage of Pre-Amp (Pin 3, 12, 18, 25) is above the V
•The gain (A
AV20 log
A
V
) of the drive circuit is as follows.
V
4V
IN
20 log
------------
V
4V
------------
V
IN
IN
IN
12 dB() (CH1/CH4)==
18 dB() (CH1/CH4)==
, then the direction of the motor is in forward.
REF
, then the direction of the motor in reverse.
REF
4. CONNECT A BY-PASS CAPACITOR, 0.1µµµµF BETWEEN THE SUPPLY VOLTAGE SOURCE.
V
CC1
7
104
5. RADIATION FIN IS CONNECTING TO THE INTERNAL GND OF THE PACKAGE.
CONNECT THE FIN TO THE EXTERNAL GND.
9

KA3012D
Typical Performa n ce Cha ra cte ristic s
VCC vs ICC (No load)
14
12
10
8
6
ICC (mA)
4
2
0
0246 810121416
AMP-I (+) vs OUTPUT VOLTAGE
Figures can be obtained by changing of AMP-I (+) from 0V to 5V, shows the voltage difference between CH-O and CH-O.
(AMP-I (+) and AMP-O are shorted.)
VCC (V)
1. CH 1 and CH 4 (12dB) 2. CH 2 and CH 3 (18dB)
Output Voltage Vom1(V)
-10
-12
12
10
8
6
4
2
0
-2
-4
-6
-8
0
12345
5
4
3
2
1
0
-1
-2
Output Voltage Vom1(V)
-3
-4
-5
012 453
AMP-I (+)(V) AMP-I (+)(V)
VCC vs Gain
1. CH 1 and CH 4 (12dB) 2. CH 2 and CH 3 (18dB)
15
14
13
12
Gain1(dB)
11
21
20
19
18
Gain1(dB)
17
10
9
4
56789
16
011121314 4
VCC (V) VCC (V)
15
56789
10
011121314

KA3012D
Test Circuits
V
’
R
R
L4
SW4
10µF
OPOUT
PV
CC1
OPIN (+)
OPIN (−)
10µF
PV
CC2
OPIN (+)
OPIN (−)
OPOUT
L3RL3
V
SW3
1516171819202122232425262728
KA3012D
1234567 891011121314
SW1
OPOUT
OPIN (−)
OPIN (+)
10µF
V
IN5
A
CC
10µF
1
1MΩ
3
2
V
IN4
SV
12V
SW6
V
R
L1
OPIN (+) OPIN (−)OPOUT
SW5
3
1
1MΩ
2
V
IN2
V
V
IN1
Bias
2.5V
V
V
IN3
OPIN (+)
V
MUTE
V
OPOUT
OPIN (−)
R
1.2kΩ
V
SW2
RL2’
L2
1
V
3
V
CC
SW7
2
11

Typical Application Circuits
SERVO PREA M P MICOM
FOCUS TRACKING BIAS SLED
10kΩ
10kΩ
LOADING
(SPINDLE)
KA3012D
MUTE
M
10kΩ
GND
10kΩ
1516171819202122232425262728
KA3012D
1234567 891011121314
GND
10kΩ
10kΩ
10kΩ
M
10kΩ
BIAS
12

KA3012D
DISCLAIMER
FAIRCHILD SEMICONDUCTOR RESERVES THE RIGHT TO MAKE CHANGES WITHOUT FURT HER NOTICE TO ANY
PRODUCTS HEREI N TO IMPROVE RELIABILITY, FUNCTIO N OR DESIGN. FAIRCH IL D DOES NOT ASSUME ANY
LIABILITY ARISING OUT OF THE APPLICATION OR USE OF ANY PRODUCT OR CIRCUIT DESCRIBED HEREIN; NEITHER
DOES IT CONVEY ANY LICENSE UNDER IT S PATENT RIGHTS, NOR THE RIGHTS OF OTHE RS.
LIFE SUPPORT POL I CY
FAIRCHILD’S PR ODUCTS ARE NOT AUTH ORIZED FOR USE AS C RITICAL COMPONENT S IN LIFE SUPPORT DE VICES
OR SYSTEMS WITHOUT THE EXPRESS WRITTEN APPROVAL OF THE PRESIDENT OF FAIRCHILD SEMICONDUCTOR
INTERNATIONAL. As used herein:
1. Life support devices or systems are devices or systems
which, (a) are intended for surgical implant into the body,
or (b) support or sustain life, and (c) whose failure to
perform when properly used in accordance with
2. A critical component in any component of a life support
device or sy stem whose fai lure to perform can be
reasonably expec ted to cause the failur e of the life support
device or system, or to affect its safety or effec t iv ene ss .
instructions for use provided in the labeling, can be
reasonably expected to result in a significant injury of the
user.
www.fairchildsemi.com
12/1/00 0.0m 001
2000 Fairchild Semiconductor International
Stock#DSxxxxxxxx
 Loading...
Loading...