

Fairchild FDMF6704 service manual
tm
August 2009
FDMF6704
FDMF6704 - XSTM DrMOS
The Xtra Small, High Performance, High Frequency DrMOS Module
Benefits
Ultra compact size - 6 mm x 6 mm MLP, 44 % space
saving compared to conventional MLP 8 mm x 8 mm
DrMOS packages.
Fully optimized system efficiency.
Clean voltage waveforms with reduced ringing.
High frequency operation.
Compatible with a wide variety of PWM controllers in the
market.
Features
Ultra- compact thermally enhanced 6 mm x 6 mm MLP
package 84 % smaller than conventional discrete solutions.
Synchronous driver plus FET multichip module.
High current handling of 35 A.
Over 93 % peak efficiency.
Tri-State PWM input.
Fairchild's PowerTrench® 5 technology MOSFETs for clean
voltage waveforms and reduced ringing.
Optimized for high switching frequencies of up to 1 MHz.
Skip mode SMOD [low side gate turn off] input.
Fairchild SyncFETTM [integrated Schottky diode] technology
in the low side MOSFET.
Integrated bootstrap Schottky diode.
Adaptive gate drive timing for shoot-through protection.
Driver output disable function [DISB# pin].
Undervoltage lockout (UVLO).
Fairchild Green Packaging and RoHS
compliant. Low profile SMD package.
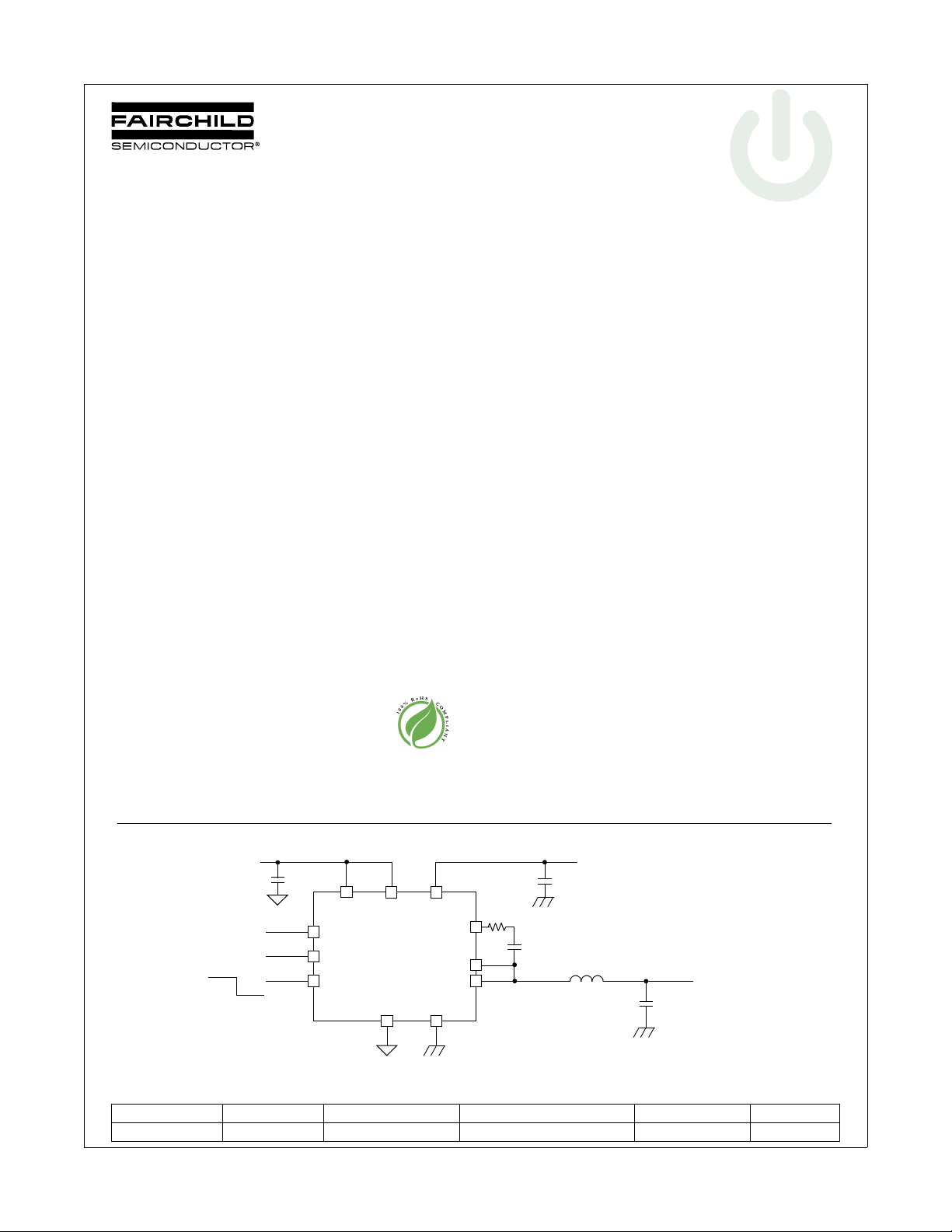
Power Train Application Circuit
5 V
C
VDRV
VCIN VIN
VDRV
DISB#
PWM Input
OFF
ON
DISB#
PWM
SMOD#
BOOT
PHASE
VSWH
CGND PGND
General Description
The XSTM DrMOS family is Fairchild’s next-generation fullyoptimized, ultra-compact, integrated MOSFET plus driver power
stage solutions for high current, high frequency synchronous
buck DC-DC applications. The FDMF6704 XSTM DrMOS
integrates a driver IC, two power MOSFETs and a bootstrap
Schottky diode into a thermally enhanced, ultra compact 6 mm x
6 mm MLP package. With an integrated approach, the complete
switching power stage is optimized with regards to driver and
MOSFET dynamic performance, system inductance and
R
. This greatly reduces the package parasitics and layout
DS(ON)
challenges associated with conventional discrete solutions.
TM
XS
DrMOS uses Fairchild's high performance
PowerTrenchTM 5 MOSFET technology, which dramatically
reduces ringing in synchronous buck converter applications.
PowerTrenchTM 5 can eliminate the need for a snubber circuit in
buck converter applications. The driver IC incorporates
advanced features such as SMOD for improved light load
efficiency and a Tri-State PWM input for compatibility with a
wide range of PWM controllers. A 5 V gate drive and an
improved PCB interface optimized for a maximum low side FET
exposed pad area, ensure higher performance. This product is
compatible with the new Intel 6 mm x 6 mm DrMOS
specification.
Applications
Compact blade servers V-core, non V-core and VTT DC-DC
converters.
Desktop computers V-core, non V-core and VTT DC-DC
converters.
Workstations V-core, non V-core and VTT DC-DC
converters.
Gaming Motherboards V-core, non V-core and VTT DC-DC
converters.
Gaming consoles.
High-current DC-DC Point of Load (POL) converters.
Networking and telecom microprocessor voltage regulators.
12 V
C
VIN
R
BOOT
C
BOOT
L
OUT
OUTPUT
C
OUT
The Xtra Small, High Performance, High Frequency DrMOS Module
Figure 1. Power Train Application Circuit
Ordering Information
Order Number Marking Temperature Range Device Package Packing Method Quantity
FDMF6704 FDMF6704_1 -55 °C to 150 °C 40 Pin, 3 DAP, MLP 6x6 mm Tape and Reel 3000
©2008 Fairchild Semiconductor Corporation
FDMF6704 Rev. G
1
www.fairchildsemi.com
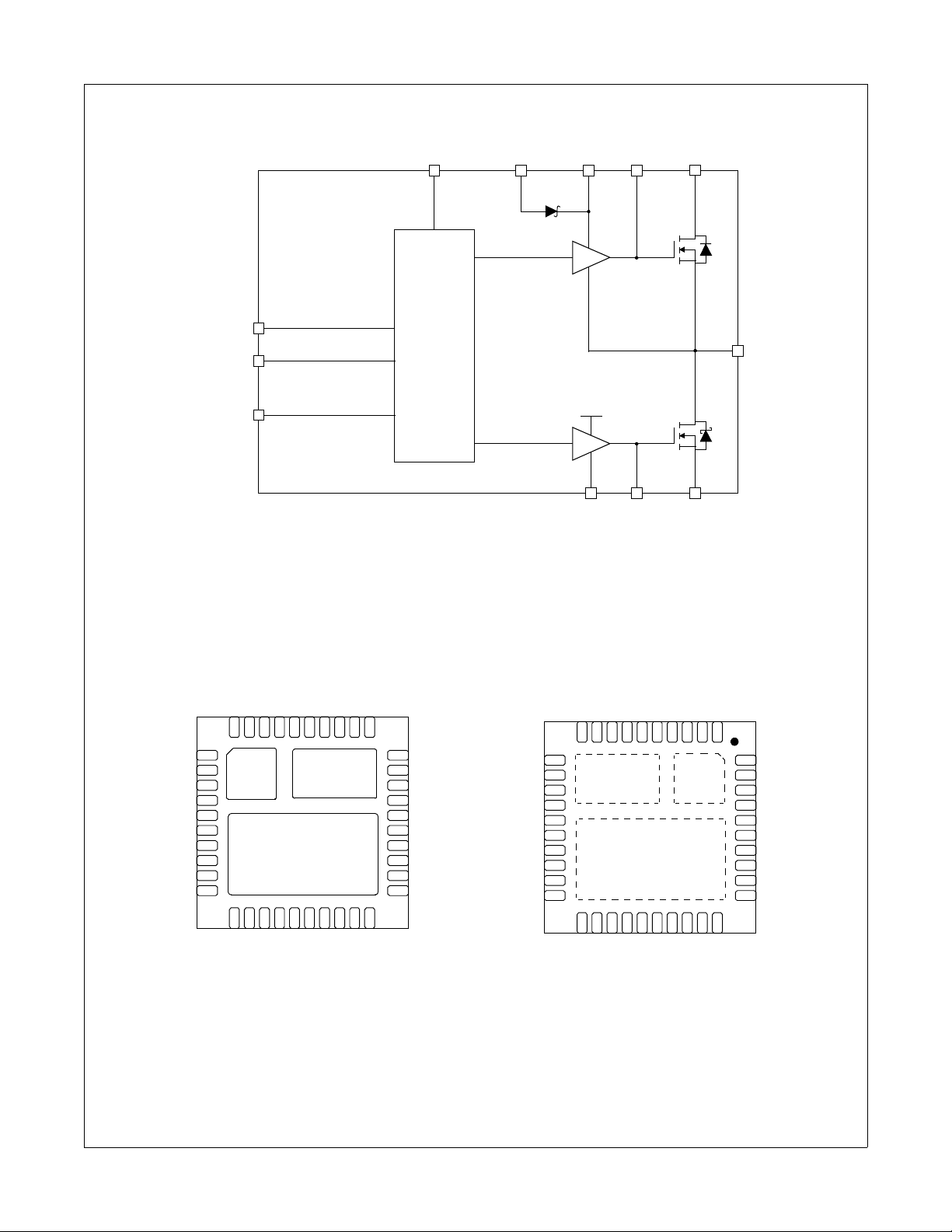
Functional Block Diagram
Figure 2. Functional Block Diagram
CGND
PGND
VSWH
VIN
BOOT
VCIN
VDRV
GH
GL
VDRV
PWM
DISB#
Overlap
Control
SMOD#
Q1
Q2
Figure 3. 6mm x 6mm, 40L MLP
CGND
VIN
VSWH
CGND
VIN
VSWH
PWM
SMOD#
DISB#
NC
CGND
GL
VSWH
VSWH
VSWH
VSWH
VSWH
VCIN
VDRV
BOOT
CGND
GH
NC
VIN
VIN
VIN
VIN
VIN
VIN
VSWH
PGND
VSWH
VSWH
PGND
PGND
PGND
PGND
PGND
PGND
PGND
PHASE
PGND
PGND
PGND
PGND
PGND
Bottom View
Top View
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
30
29
28
27
26
25
24
23
22
21
40
39
38
37
36
35
34
33
32
31
123456789
10
40
39
38
37
36
35
34
33
32
31
302928272625242322
21
11
12
13
14
15
16
17
18
19
20
SMOD#
VCIN
VDRV
BOOT
CGND
GH
NC
VIN
VIN
PHASE
VIN
VIN
VIN
VIN
VSWH
PGND
PGND
PGND
PGND
PGND
PGND
VSWH
VSWH
PGND
PGND
PGND
PGND
PGND
PGND
PGND
PWM
DISB#
NC
CGND
GL
VSWH
VSWH
VSWH
VSWH
VSWH
41
42
43
41
42
43
FDMF6704
The Xtra Small, High Performance, High Frequency DrMOS Module
Pin Configuration
FDMF6704 Rev. G
2
www.fairchildsemi.com
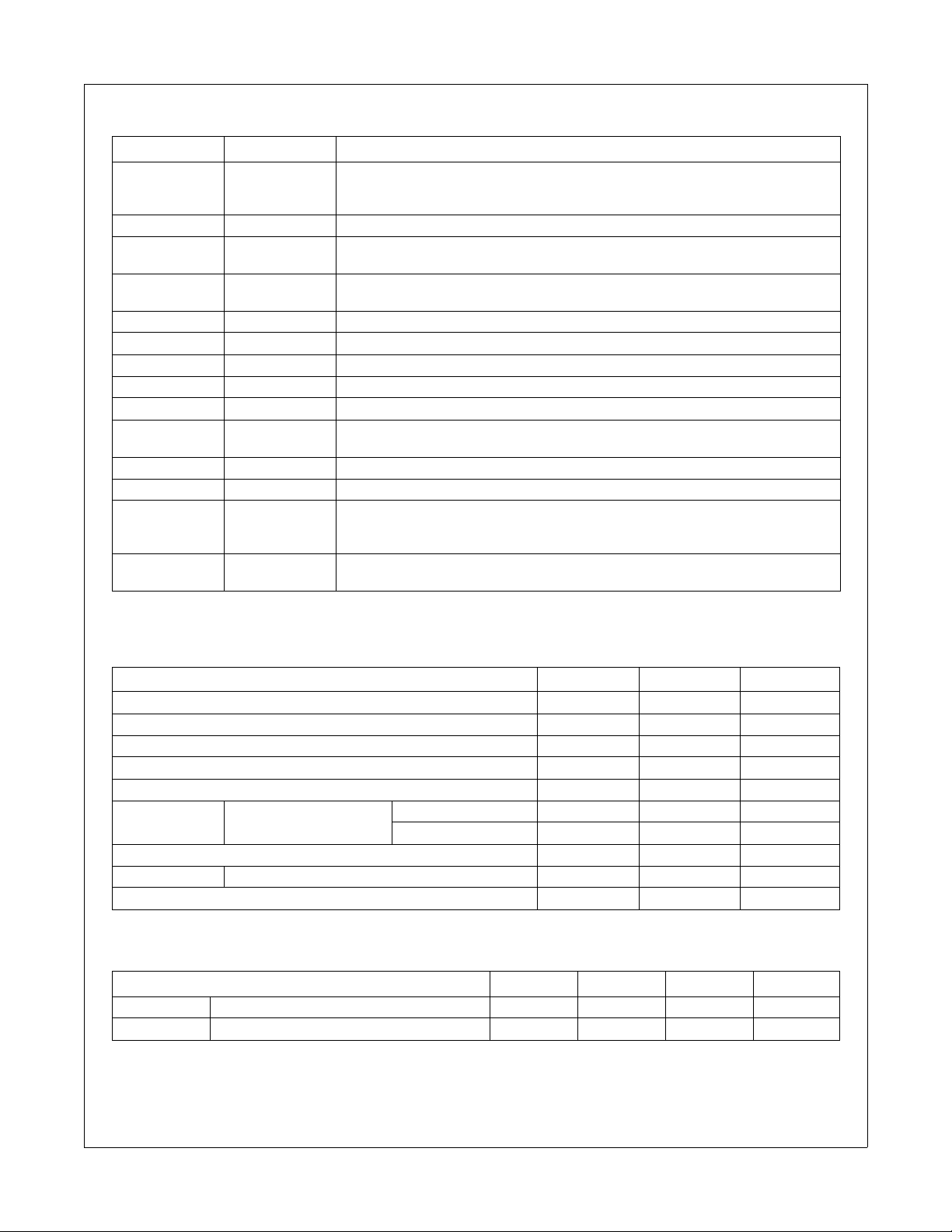
Pin Description
Pin Name Function
When SMOD# = HI, low side driver is inverse of PWM input. When SMOD# = Low, low
1 SMOD#
2 VCIN IC bias supply. Minimum 1 F ceramic capacitor is recommended from this pin to CGND.
3 VDRV
4 BOOT
5, 37, 41 CGND IC ground. Ground return for driver IC.
6 GH For manufacturing test only. This pin must be floated. Must not be connected to any pin.
7 PHASE Switch node pin for easy bootstrap capacitor routing. Electrically shorted to VSWH pin.
8, 38 NC No connect.
9-14, 42 VIN Power input. Output stage supply voltage.
15, 29-35, 43 VSWH
16-28 PGND Power ground. Output stage ground. Source pin of low side MOSFET(s).
36 GL For manufacturing test only. This pin must be floated. Must not be connected to any pin.
39 DISB#
40 PWM
side driver is disabled. This pin has no internal pullup or pulldown. It should not be left
floating. Do not add noise filter cap.
Power for low side driver. Minimum 1 F ceramic capacitor is recommended to be
connected as close as possible from this pin to CGND.
Bootstrap supply input. Provides voltage supply to high-side MOSFET driver. Connect
bootstrap capacitor from this pin to PHASE.
Switch node input. Provides return for high-side bootstrapped driver and acts as a
sense point for the adaptive shoot-thru protection.
Output disable. When low, this pin disable FET switching (GH and GL are held low). This
pin has no internal pullup or pulldown. It should not be left floating. Do not add noise filter
cap.
PWM Signal Input. This pin accepts a Tri-state logic-level PWM signal from the controller.
Do not add noise filter cap.
FDMF6704
The Xtra Small, High Performance, High Frequency DrMOS Module
Absolute Maximum Rating
Parameter Min Max Units
VCIN, VDRV, DISB#, PWM, SMOD#, GL to CGND 6 V
VIN to PGND, CGND 27 V
BOOT, GH to VSWH, PHASE 6 V
BOOT, VSWH, PHASE, GH to GND 27 V
BOOT to VDRV 22 V
I
* V
O(AV)
I
* 80 A
O(peak)
R
θJPCB
Operating and Storage Junction Temperature Range -55 150 °C
* I
and I
O(AV)
O(peak)
= 12 V, VO = 1.3 V
IN
Junction to PCB Thermal Resistance 3.75 °C/W
are measured in FCS evaluation board. These ratings can be changed with different application setting.
fSW = 350 kHz 35 A
fSW = 1 MHz 32 A
Recommended Operating Range
Parameter Min Typ Max Units
V
CIN
V
IN
* May be operated at lower input voltage. See figure 10.
Control Circuit Supply Voltage 4.5 5 5.5 V
Output Stage Supply Voltage 3
*
12 14 V
FDMF6704 Rev. G
3
www.fairchildsemi.com
Electrical Characteristics
VIN = 12 V, TA = 25 °C unless otherwise noted.
Parameter Symbol Conditions Min Typ Max Units
Operating Quiescent Current IQ
VCIN UVLO
UVLO Threshold 3.0 3.2 3.4 V
UVLO COMP Hysteresis 0.2 V
PWM Input
Sink Impedance 10 k
Source Impedance 10 k
Tri-State Rising Threshold V
Hysteresis 100 mV
Tri-State Falling Threshold V
Hysteresis 100 mV
Tri-State Pin Open 2.5 V
Tri-State Shut Off Time 100 ns
SMOD# and DISB# Input
High Level Input Voltage 2 V
Low Level Input Voltage 0.8 V
Input Bias Current -2 2 A
Propagation Delay Time
High Side Driver
Rise Time 10 % to 90 % 25 ns
Fall Time 90 % to 10 % 20 ns
Deadband Time t
Propagation Delay t
Low Side Driver
Rise Time 10 % to 90 % 25 ns
Fall Time 90 % to 10 % 20 ns
Deadband Time t
Propagation Delay t
250 ns Time Out Circuit
250 ns Time Delay
DTHH
PDHL
DTLH
PDLL
PWM = GND 2
PWM = V
PWM = GND, delay between SMOD#
or DISB# from HI to LO to GL from HI
to LO.
GL going LO to GH going HI, 10 % to
10 %
PMW going LO to GH going LO 10 ns
VSWH going LO to GL going HI, 10
% to 10 %
PWM going HI to GL going LO 10 ns
Delay between GH from HI to LO and
GL from LO to HI.
CIN
= 5 V 3.2 3.4 3.6 V
CIN
= 5 V 1.2 1.4 1.6 V
CIN
15 ns
25 ns
20 ns
250 ns
2
mA
FDMF6704
The Xtra Small, High Performance, High Frequency DrMOS Module
FDMF6704 Rev. G
4
www.fairchildsemi.com
FDMF6704
Description of Operation
Circuit Description
The FDMF6704 is a driver plus FET module optimized for
synchronous buck converter topology. A single PWM input
signal is all that is required to properly drive the high-side and
the low-side MOSFETs. Each part is capable of driving speeds
up to 1 MHz.
PWM
When the PWM input goes high, the high side MOSFET turns
on. When it goes low, the low side MOSFET turns on. When it is
open, both the low side and high side MOFET will turn off.
The DISB# input is combined with the PWM signal to control the
driver output. In a typical multiphase design, DISB# will be a
shared signal used to turn on all phases. The individual PWM
signals from the controller will be used to dynamically enable or
disable individual phases.
Low-Side Driver
The low-side driver (GL) is designed to drive a ground
referenced low R
internally connected between VDRV and CGND. When the
driver is enabled, the driver's output is 180° out of phase with
the PWM input. When the driver is disabled (DISB# = 0 V), GL
is held low.
High-Side Driver
The high-side driver (GH) is designed to drive a floating
N-channel MOSFET. The bias voltage for the high-side driver is
developed by a bootstrap supply circuit, consisting of the
internal diode and external bootstrap capacitor (C
start-up, VSWH is held at PGND, allowing C
V
through the internal diode. When the PWM input goes
DRV
high, GH will begin to charge the high-side MOSFET's gate
(Q1). During this transition, charge is removed from C
delivered to Q1's gate. As Q1 turns on, VSWH rises to VIN,
forcing the BOOT pin to VIN +V
sufficient VGS enhancement for Q1. To complete the switching
cycle, Q1 is turned off by pulling GH to VSWH. C
recharged to VDRV when VSWH falls to PGND. GH output is in
phase with the PWM input. When the driver is disabled, the
high-side gate is held low.
N-channel MOSFET. The bias for GL is
DS(ON)
BOOT
, which provides
C(BOOT)
). During
BOOT
to charge to
and
BOOT
is then
BOOT
Adaptive Gate Drive Circuit
The driver IC embodies an advanced design that ensures
minimum MOSFET dead-time while eliminating potential
shoot-through (cross-conduction) currents. It senses the state of
the MOSFETs and adjusts the gate drive, adaptively, to ensure
they do not conduct simultaneously. Refer to Figure 4 for the
relevant timing waveforms.
To prevent overlap during the low-to-high switching transition
(Q2 OFF to Q1 ON), the adaptive circuitry monitors the voltage
at the GL pin. When the PWM signal goes HIGH, Q2 will begin
to turn OFF after some propagation delay (t
pin is discharged below 1 V, Q1 begins to turn ON after adaptive
delay t
To preclude overlap during the high-to-low transition (Q1 OFF to
Q2 ON), the adaptive circuitry monitors the voltage at the
VSWH pin. When the PWM signal goes LOW, Q1 will begin to
turn OFF after some propagation delay (t
VSWH pin falls below 1 V, Q2 begins to turn ON after adaptive
delay t
Additionally, VGS of Q1 is monitored. When V
discharged low, a secondary adaptive delay is initiated, which
results in Q2 being driven ON after 250 ns, regardless of VSWH
state. This function is implemented to ensure C
recharged each switching cycle, particularly for cases where the
power convertor is sinking current and VSWH voltage does not
fall below the 1 V adaptive threshold. The 250 ns secondary
delay is longer than t
DTHH
DTLH
.
.
.
DTLH
). Once the GL
PDLL
). Once the
PDHL
GS(Q1)
BOOT
is
is
The Xtra Small, High Performance, High Frequency DrMOS Module
SMOD
The SMOD (Skip Mode) function allows for higher converter
efficiency under light load conditions. During SMOD, the LS
FET is disabled and it prevents discharging of output caps.
When the SMOD# pin is pulled high, the sync buck converter
will work in synchronous mode. When the SMOD# pin is pulled
low, the LS FET is turned off. The SMOD function does not have
internal current sensing. This SMOD# pin is connected to a
PWM controller which enables or disables the SMOD
automatically when the controller detects light load condition.
Normally this pin is Active Low.
FDMF6704 Rev. G
5
www.fairchildsemi.com
 Loading...
Loading...