

Estun pronet series User Manual

ProNet Series AC Servo User's Manual
(Version :V2.10)
Copyright © 2011 ESTUN AUTOMATION TECHNOLOGY CO., LTD
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or
by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of ESTUN.
No patent liability is assumed with respect to the use of the information contained herein.

ProNet Series AC Servo User's Manual
- 1 -
About this manual
This manual describes the following information required for designing and maintaining ProNet series servo drives.
•Specification of the servo drives and servomotors.
•Procedures for installing the servo drives and servomotors.
•Procedures for wiring the servo drives and servomotors.
•Procedures for operating of the servo drives.
•Procedures for using the panel operator.
•Communication protocols.
•Ratings and characteristics.
Intended Audience:
•Those designing ProNet series servo drive systems.
•Those installing or wiring ProNet series servo drives.
•Those performing trial operation or adjustments of ProNet series servo drives.
•Those maintaining or inspecting ProNet series servo drives.
ProNet Series AC Servo User's Manual
- 2 -
Safety Precautions
■ Do not connect the servomotor directly to the local electrical network.
Failure to observe this may result in damage to servomotor.
■ Do not plug or unplug connectors from servo drive when power is on.
Failure to observe this may result in damage to servo drive and servomotor.
■Please note that even after power is removed, residual voltage still remains in the capacitor inside the servo drive. If
inspection is to be performed after power is removed, please wait 5 minutes to avoid risk of electrical shock.
■ Keep servo drives and other devices separated by at least 10mm.
The servo drive generates heat. Install the servo drive so that it can radiate heat freely. When installing servo drives
with other devices in a control panel, provide at least 10mm space between them and 50mm space above and below
them. Please install servo drives in an environment free from condensation, vibration and shock.
■ Perform noise reduction and grounding properly.
Please comply with the following instructions to avoid noise generated by signal lines.
1. Separate high-voltage cables from low-voltage cables.
2. Use cables as short as possible.
3. Single point grounding is required for the servomotor and servo drive (grounding resistance 100Ω or below).
4. Never use a line filter for the power supply in the circuit.
■ Conduct a voltage resistance test for the servo drive under the following conditions:
1. Input voltage: AC 1500Vrms, 1 minute
2. Braking current: 100mA
3. Frequency:50/60Hz
4. Voltage applied point: Between L1, L2,L3 terminals and frame ground.
■ Use a fast-response type ground-fault interrupter.
For a ground-fault interrupter, always use a fast-response type or one designed for PWM inverters. Do not use a
time-delay type.
■ Do not make any extreme adjustments or setting changes of parameters.
Failure to observe this caution may result in injury or damage to the product due to unstable operation.
■ The servomotor cannot be operated by turning the power on and off.
Frequently turning the power ON and OFF causes the internal circuit elements to deteriorate, resulting in unexpected
problems. Always start or stop the servomotor by using reference pulses.

ProNet Series AC Servo User's Manual
- 3 -
—Contents—
About this manual ........................................................................................................................................................... - 1 -
Safety Precautions .......................................................................................................................................................... - 2 -
Chapter 1 ........................................................................................................................................................................ - 7 -
Checking Products and Parts Names .............................................................................................................................. - 7 -
1.1 Checking Products on Delivery ......................................................................................................................... - 7 -
1.1.1 Servomotor ............................................................................................................................................ - 7 -
1.1.2 Servo drive ............................................................................................................................................ - 8 -
1.2 Part Names ..................................................................................................................................................... - 15 -
1.2.1 Servomotor .......................................................................................................................................... - 15 -
1.2.2 Servo drive .......................................................................................................................................... - 16 -
Chapter 2 ...................................................................................................................................................................... - 21 -
Installation ..................................................................................................................................................................... - 21 -
2.1 Servomotor ..................................................................................................................................................... - 21 -
2.1.1 Storage ................................................................................................................................................ - 21 -
2.1.2 Installation Sites .................................................................................................................................. - 21 -
2.1.3 Installation Alignment ........................................................................................................................... - 22 -
2.1.4 Installation Orientation ......................................................................................................................... - 22 -
2.1.5 Handling Oil and Water ........................................................................................................................ - 22 -
2.1.6 Cable Tension ...................................................................................................................................... - 23 -
2.1.7 Install to the Client ............................................................................................................................... - 23 -
2.2 Servo Drive ..................................................................................................................................................... - 23 -
2.2.1 Storage ................................................................................................................................................ - 23 -
2.2.2 Installation Sites .................................................................................................................................. - 23 -
2.2.3 Installation Orientation ......................................................................................................................... - 24 -
2.2.4 Installation Method .............................................................................................................................. - 24 -
Chapter 3 ...................................................................................................................................................................... - 26 -
Wiring ............................................................................................................................................................................ - 26 -
3.1 Main Circuit Wiring .......................................................................................................................................... - 26 -
3.1.1 Names and Functions of Main Circuit Terminals .................................................................................. - 26 -
3.1.2 Typical Main Circuit Wiring Examples .................................................................................................. - 27 -
3.2 I/O Signals ...................................................................................................................................................... - 31 -
3.2.1 Examples of I/O Signal Connections ................................................................................................... - 31 -
3.2.2 I/O Signal Names and Functions ......................................................................................................... - 32 -
3.2.3 I/O Signal Connector (CN1) Terminal Layout ...................................................................................... - 34 -
3.2.4 Interface Circuit ................................................................................................................................... - 35 -
3.3 Wiring Encoders .............................................................................................................................................. - 36 -
3.3.1 Connecting an Encoder(CN2) .............................................................................................................. - 36 -
3.3.2 Encoder Connector(CN2) Terminal Layout ......................................................................................... - 38 -
3.4 Communication Connection ............................................................................................................................ - 38 -
3.4.1 Communication Connector(CN3) Terminal Layout .............................................................................. - 38 -
3.4.2 Communication Connector(CN4) Terminal Layout .............................................................................. - 39 -
3.5 Standard Wiring Examples .............................................................................................................................. - 40 -
3.5.1 Single-phase 200V ProNet-02A~04A/ProNet-E-02A~04A ............................................................... - 40 -

ProNet Series AC Servo User's Manual
- 4 -
3.5.2 Three-phase 200V ProNet-08A~50A/ProNet-E-08A~50A ................................................................ - 41 -
3.5.3 Three-phase 400V ProNet-10D~75D/ProNet-E-10D~50D ............................................................... - 42 -
3.5.4 Three-phase 400V ProNet-1AD~2BD ................................................................................................ - 43 -
3.5.5 Single-phase 100V ProNet-02B/ProNet-E-02B ................................................................................... - 44 -
3.5.6 Single-phase 100V ProNet-04B /ProNet-E-04B .................................................................................. - 45 -
3.5.7 Three-phase 100V ProNet-08B/ ProNet-E-08B ................................................................................... - 46 -
3.5.8 Position Control Mode ......................................................................................................................... - 47 -
3.5.9 Speed Control Mode ............................................................................................................................ - 48 -
3.5.10 Torque Control Mode ......................................................................................................................... - 49 -
3.6 Wiring for Noise Control .................................................................................................................................. - 50 -
3.6.1 Noise Control ....................................................................................................................................... - 50 -
3.6.2 Precautions on Connecting Noise Filter .............................................................................................. - 51 -
3.7 Installation Conditions of EMC Directives ....................................................................................................... - 53 -
3.8 Using More than One Servo Drive .................................................................................................................. - 55 -
3.9 Connecting DC Bus ........................................................................................................................................ - 57 -
Chapter 4 ...................................................................................................................................................................... - 58 -
Operation ...................................................................................................................................................................... - 58 -
4.1 Trial Operation ................................................................................................................................................ - 58 -
4.1.1 Trial Operation for Servomotor Without Load ...................................................................................... - 61 -
4.1.2 Trial Operation for Servomotor without Load from Host Reference ..................................................... - 63 -
4.1.3 Trial Operation with the Servomotor Connected to the Machine .......................................................... - 67 -
4.1.4 Trial Operation for Servomotor with Brakes ......................................................................................... - 68 -
4.1.5 Position Control by Host Controller ...................................................................................................... - 68 -
4.2 Control Mode Selection ................................................................................................................................... - 68 -
4.3 Setting Common Basic Functions ................................................................................................................... - 70 -
4.3.1 Setting the Servo ON Signal ................................................................................................................ - 70 -
4.3.2 Switching the Servomotor Rotation Direction ...................................................................................... - 71 -
4.3.3 Setting the Overtravel Limit Function ................................................................................................... - 72 -
4.3.4 Setting for Holding Brakes ................................................................................................................... - 75 -
4.3.5 Instantaneous Power Loss Settings..................................................................................................... - 78 -
4.4 Absolute Encoders .......................................................................................................................................... - 79 -
4.4.1 Selecting an Absolute Encoder ............................................................................................................ - 79 -
4.4.2 Handling Battery .................................................................................................................................. - 80 -
4.4.3 Replacing Battery ................................................................................................................................ - 81 -
4.4.4 Absolute Encoder Setup(Fn010、Fn011) ............................................................................................ - 81 -
4.5 Operating Using Speed Control with Analog Reference.................................................................................. - 82 -
4.5.1 Setting Parameters .............................................................................................................................. - 82 -
4.5.2 Setting Input Signals ............................................................................................................................ - 83 -
4.5.3 Adjusting Reference Offset .................................................................................................................. - 84 -
4.5.4 Soft Start .............................................................................................................................................. - 87 -
4.5.5 Speed Reference Filter Time Constant ................................................................................................ - 87 -
4.5.6 S-curve Risetime ................................................................................................................................. - 88 -
4.5.7 Using the Zero Clamp Function ........................................................................................................... - 88 -
4.5.8 Encoder Signal Output ........................................................................................................................ - 90 -
4.5.9 Speed coincidence output ................................................................................................................... - 91 -
4.6 Operating Using Position Control .................................................................................................................... - 92 -

ProNet Series AC Servo User's Manual
- 5 -
4.6.1 Basic Setting in Position Control .......................................................................................................... - 92 -
4.6.2 Setting the Clear Signal ....................................................................................................................... - 96 -
4.6.3 Setting the Electronic Gear .................................................................................................................. - 96 -
4.6.4 Smoothing ........................................................................................................................................... - 99 -
4.6.5 Low Frequency Vibration Suppression .............................................................................................. - 100 -
4.6.6 Positioning Completion Output Signal ............................................................................................... - 102 -
4.6.7 Reference Pulse Inhibit Function (INHIBIT) ....................................................................................... - 103 -
4.6.8 Position Control (contact reference) ................................................................................................. - 104 -
4.6.9 Position Homing Control (Homing Function)...................................................................................... - 107 -
4.7 Operating Using Torque Control .................................................................................................................... - 110 -
4.7.1 Setting Parameters ............................................................................................................................ - 110 -
4.7.2 Torque Reference Input ..................................................................................................................... - 111 -
4.7.3 Adjusting the Reference Offset .......................................................................................................... - 112 -
4.7.4 Limiting Servomotor Speed During Torque Control ............................................................................ - 113 -
4.8 Operating Using Speed Control with an Internally Set Speed ....................................................................... - 114 -
4.8.1 Setting Parameters ............................................................................................................................ - 115 -
4.8.2 Input Signal Settings .......................................................................................................................... - 116 -
4.8.3 Operating Using an Internally Set Speed ........................................................................................... - 116 -
4.9 Limiting Torque .............................................................................................................................................. - 117 -
4.9.1 Internal Torque Limit .......................................................................................................................... - 117 -
4.9.2 External Torque Limit ......................................................................................................................... - 118 -
4.9.3 Torque Limiting Using an Analog Voltage Reference ........................................................................ - 119 -
4.10 Control Mode Selection ............................................................................................................................... - 120 -
4.10.1 Setting Parameters .......................................................................................................................... - 120 -
4.10.2 Switching the Control Mode ............................................................................................................. - 120 -
4.11 Other Output Signals ................................................................................................................................... - 121 -
4.11.1 Servo alarm output........................................................................................................................... - 121 -
4.11.2 Rotation Detection Output Signal (/TGON) ...................................................................................... - 122 -
4.11.3 Servo Ready (/S-RDY) Output ......................................................................................................... - 122 -
4.11.4 Encoder C Pluse Output (/PGC) ...................................................................................................... - 122 -
4.11.5 Over travel signal output (OT) .......................................................................................................... - 123 -
4.11.6 Servo Enabled Motor Excitation Output(/RD) .................................................................................. - 123 -
4.11.7 Torque Limit Detection Output (/CLT) ............................................................................................... - 123 -
4.11.8 Torque Detection Output (/TCR) ...................................................................................................... - 125 -
4.12 Online Autotuning ........................................................................................................................................ - 125 -
4.12.1 Online Autotuning ............................................................................................................................ - 125 -
4.12.2 Online Autotuning Procedure ........................................................................................................... - 126 -
4.12.3 Setting Online Autotuning ................................................................................................................ - 127 -
4.12.4 Machine Rigidity Setting for Online Autotuning ................................................................................ - 127 -
Chapter 5 .................................................................................................................................................................... - 128 -
Panel Operator ............................................................................................................................................................ - 128 -
5.1 Basic Operation ............................................................................................................................................ - 128 -
5.1.1 Functions on Panel Operator ............................................................................................................. - 128 -
5.1.2 Resetting Servo Alarms ..................................................................................................................... - 128 -
5.1.3 Basic Mode Selection ........................................................................................................................ - 129 -
5.1.4 Status Display Mode .......................................................................................................................... - 129 -

ProNet Series AC Servo User's Manual
- 6 -
5.1.5 Operation in Parameter Setting Mode ............................................................................................... - 131 -
5.1.6 Operation in Monitor Mode ................................................................................................................ - 132 -
5.2 Operation in Utility Function Mode ................................................................................................................ - 135 -
5.2.1 Alarm Traceback Data Display ........................................................................................................... - 135 -
5.2.2 Parameter Settings Initialization ........................................................................................................ - 136 -
5.2.3 Operation in JOG Mode ..................................................................................................................... - 137 -
5.2.4 Automatic Adjustment of the Speed Reference Offset ....................................................................... - 138 -
5.2.5 Manual Adjustment of the Speed Reference Offset ........................................................................... - 139 -
5.2.6 Offset-adjustment of Servomotor Current Detection Signal ............................................................... - 140 -
5.2.7 Software Version Display ................................................................................................................... - 142 -
5.2.8 Position Teaching Function ................................................................................................................ - 142 -
5.2.9 Static Inertia Detection ....................................................................................................................... - 142 -
5.2.10 Absolute Encoder Multiturn Data and Alarm Reset .......................................................................... - 143 -
5.2.11 Absolute Encoder Related Alarms Reset ......................................................................................... - 143 -
Chapter 6 .................................................................................................................................................................... - 144 -
MODBUS Communication ........................................................................................................................................... - 144 -
6.1 RS-485 Communication Wiring ..................................................................................................................... - 144 -
6.2 MODBUS Communication Related Parameters ........................................................................................... - 145 -
6.3 MODBUS Communication Protocol .............................................................................................................. - 146 -
6.3.1 Code Meaning ................................................................................................................................... - 146 -
6.3.2 Communication Error Disposal .......................................................................................................... - 152 -
6.3.3 Data Communication Address of Servo State .................................................................................... - 153 -
Chapter 7 .................................................................................................................................................................... - 156 -
Specifications and Characters ..................................................................................................................................... - 156 -
7.1 Servo drive Specifications and Models ......................................................................................................... - 156 -
7.2 Servo drive Dimensional Drawings ............................................................................................................... - 159 -
Appendix A .................................................................................................................................................................. - 162 -
Parameter ................................................................................................................................................................... - 162 -
A.1 Parameter List .............................................................................................................................................. - 162 -
A.2 Description of Parameter Type ..................................................................................................................... - 169 -
A.3 Parameters in detail ...................................................................................................................................... - 170 -
Appendix B .................................................................................................................................................................. - 188 -
Alarm Display .............................................................................................................................................................. - 188 -
ProNet Series AC Servo User's Manual
- 7 -
Chapter 1
Checking Products and Parts Names
1.1 Checking Products on Delivery
If any of the above items are faulty or incorrect, contact your ESTUN representative or the dealer from whom you
purchased the products.
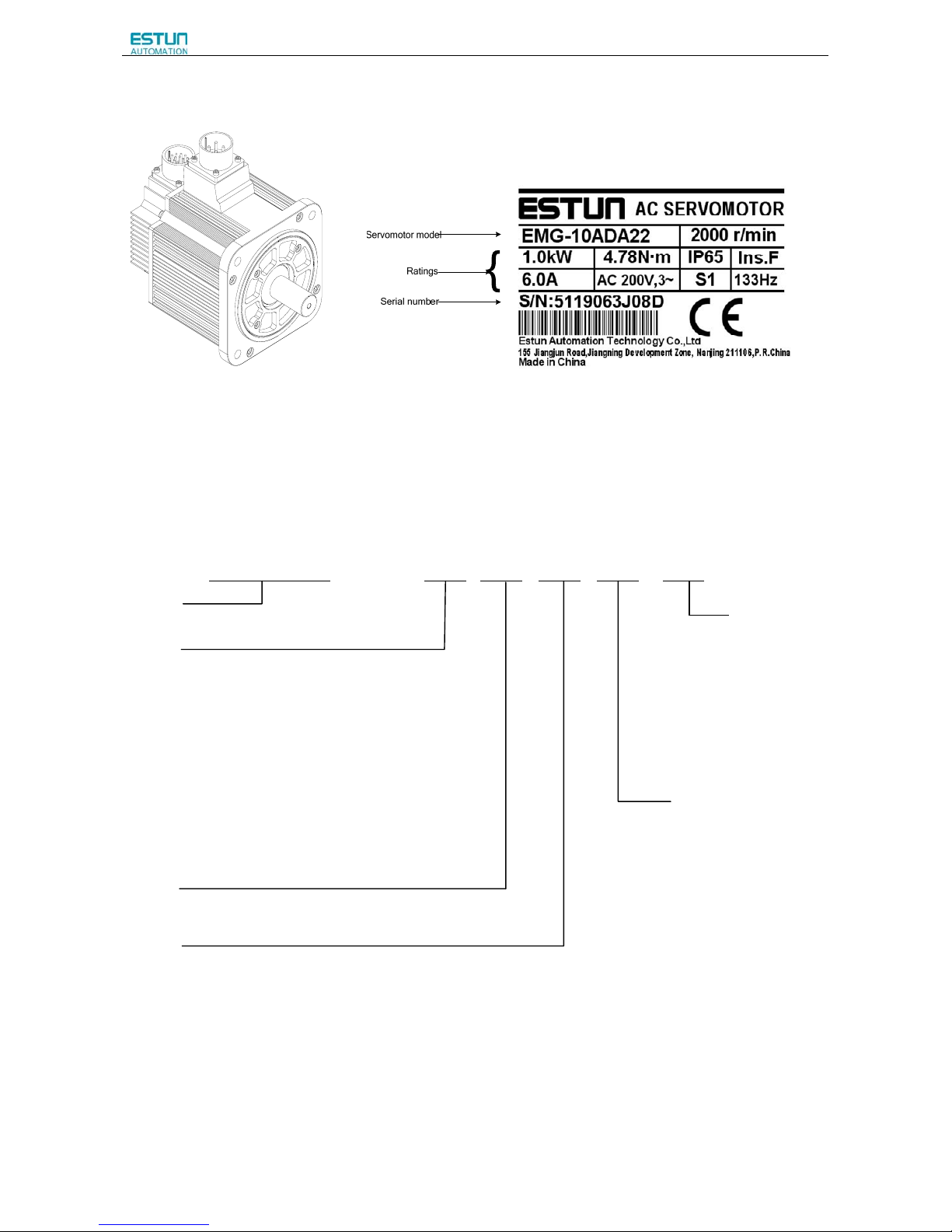
1.1.1 Servomotor
Servomotor Model Designation
EMG– 10 A D A 1 1
ESTUN Servomotor
【1+2】 【3】 【4】 【5】 【6】 【7】
EMG Model
【1+2】Rated Output
【4】Encoder
【7】Option
Code Rated Output Code Encoder Code Option
10 1.0kW D
Incremental encoder:131072P/R
1 None
15 1.5kW S
Absolute encoder:131072P/R
2 With oil seal
20 2.0kW R Resolver 3 With brake(DC 24V)
30 3.0kW P
Incremental Wire-saving Type:2500P/R
4 With oil seal and brake(DC 24V)
50 5.0kW
【3】Voltage
【5】Designing Sequence
【6】Shaft End
Code Voltage Code Designing Sequence Code Shaft End
A 200V AC A Designing sequence 1 Straight without key(Standard)
B 100VAC 2 Straight with key and tap
D 400VAC
Notes:
1. The EMG-30A□A□□, EMG-50A□A□□ servomotors are not mounted with an incremental encoder.
2. There is no brake mounted on the EMG-□□□DA□□ servomotor.
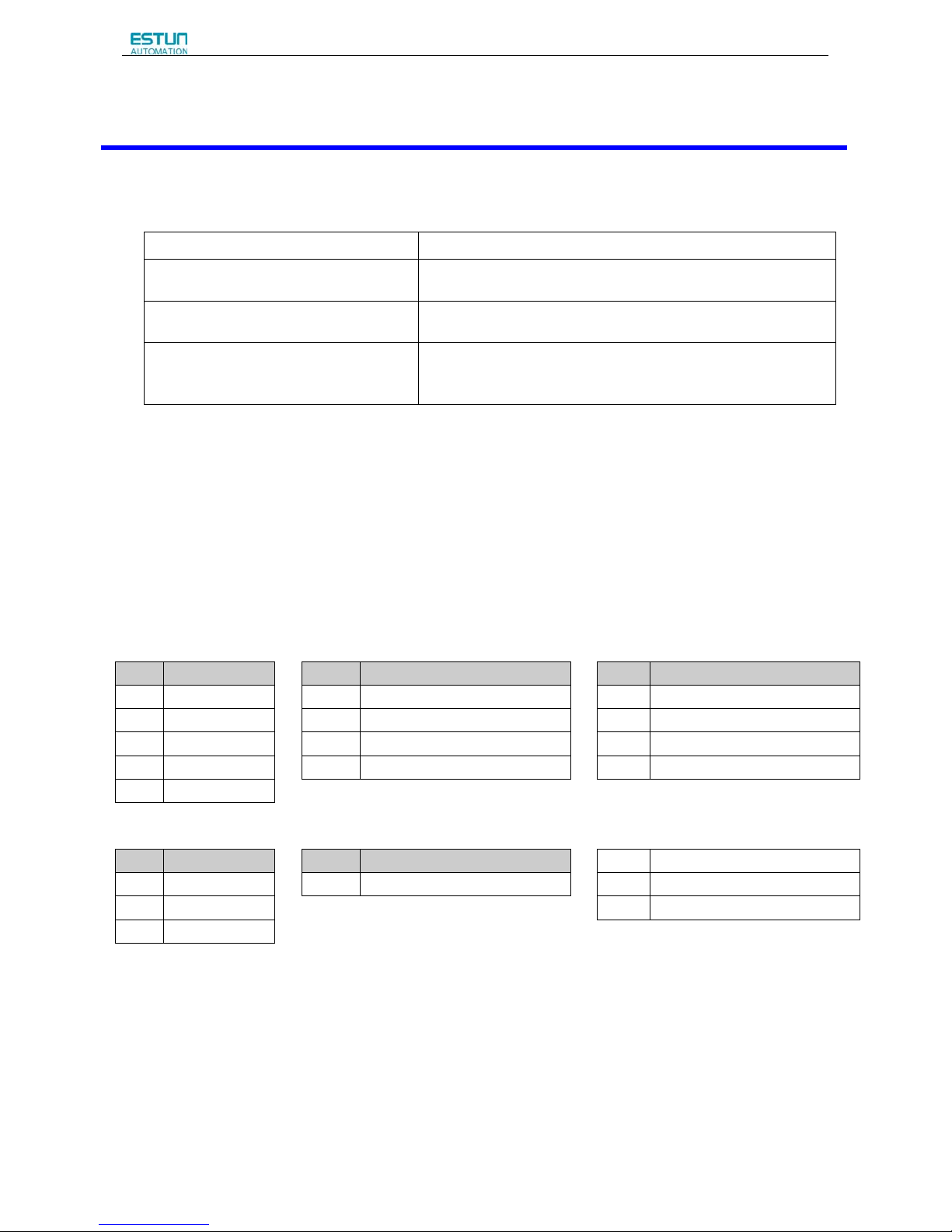
Check Items Comments
Are the delivered products the ones that
were ordered?
Check the model numbers marked on the nameplate on the
servomotor and servo drive.
Is there any damage?
Check the overall appearance, and check for damage or scratches
that may have occurred during shipping.
Does the servomotor shaft rotate smoothly?
If the servomotor shaft can be easily rotated by hand, then the motor
is working normally. However, if a brake is installed on the
servomotor, then it cannot be turned by hand.
ProNet Series AC Servo User's Manual
- 8 -
Appearance and Nameplate
1.1.2 Servo drive
ProNet Servo drive Model Designation
PRONET – 10 A E A -P
Note:
○
1
Resolver, with the feature of high reliability and long service life, is suitable for harsh environments and a wide range
of temperatures and humidity levels. The factory setting for the resolver precision used in the ESTUN servo drive is
4096.
○
2
ProNet-□□□E□ Supports AE100 model. ProNet-□□□M□ does not support extended module.
Rated Output
02 0.2kW
04 0.4 kW
08 0.75 kW
10 1.0 kW
15 1.5 kW
20 2.0 kW
30 3.0 kW
50 5.0 Kw
70 7.0kW
75 7.5 kW
1A 11 kW
1E 15 Kw
2B 22kW
Vol tag e
A 200VAC
B:100VAC
D 400VAC
Control Mode
M Speed control, torque control, position control
E Speed control, torque control, position control (support extended module)
Encoder Interface
A 17-bit serial encoder
Absolute Encoder
B Resolver
○
1
ProNet Model
Extended module type
-D DP100
-E EC100
-P PL100

ProNet Series AC Servo User's Manual
- 9 -
ProNet-E Servo drive Model Designation
PRONET–E – 10 A
Note:
○
1
ProNet-E is only available with the wire-saving incremental encoder (2500 P/R)
○2 ProNet-E does not support extended module.
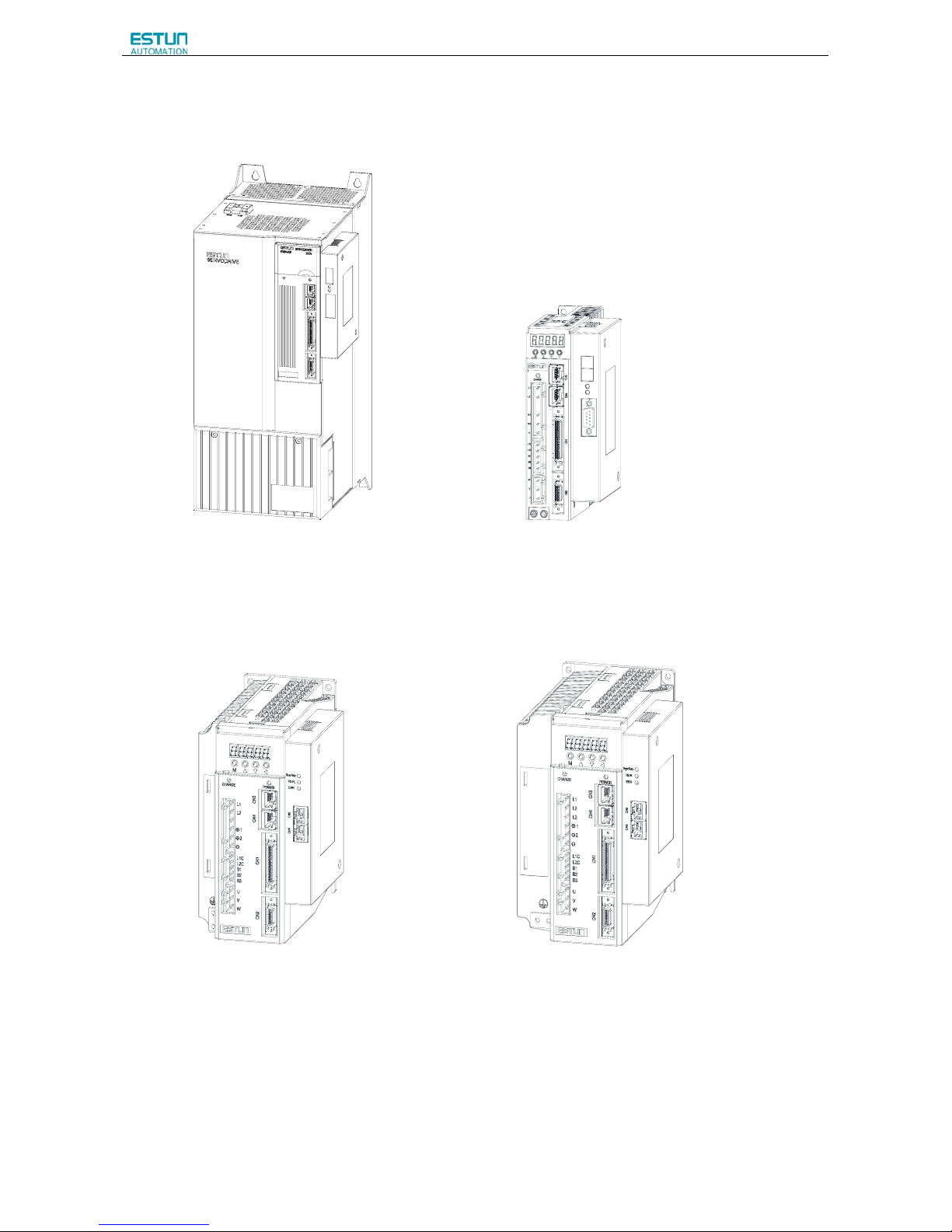
ProNet Servo Drive Appearance
ProNet-02A/04A ProNet-08A/10A
L1
L2
L3
CN3
CN4
CN1
CN2
L1C
L2C
B1
B2
B3
U
V
W
+
-
1
+2
CHARGE POWER
Rated Output
02 0.2kW
04 0.4 kW
08 0.75 kW
10 1.0 kW
15 1.5 kW
20 2.0 kW
30 3.0 kW
50 5.0 kW
Vol tag e
A:200VAC
B:100VAC
D
:400VAC
ProNet-E Model

ProNet Series AC Servo User's Manual
- 10 -
ProNet-15A/20A ProNet-10D/15D/20D
L1
L2
L3
CN3
CN4
CN1
CN2
L1C
L2C
B1
B2
B3
U
V
W
+
-
1
+
2
CHARGE POWER
L1
L2
L3
CN3
CN4
CN1
CN2
24V
B1
B2
B3
U
V
W
+
-
1
+
2
CHARGE
POWER
GND
ProNet-30A/50A ProNet-30D/50D/70D/75D
CN3
CN4
CN1
CN2
CHARGE
POWER
L1
L2
L3
L1C
L2C
B1
B2
B3
U
V
W
+
-
1
+
2
CN3
CN4
CN1
CN2
CHARGE
POWER
L1
L2
L3
24V
GND
B1
B2
B3
U
V
W
+
-
1
+
2
ProNet Series AC Servo User's Manual
- 11 -
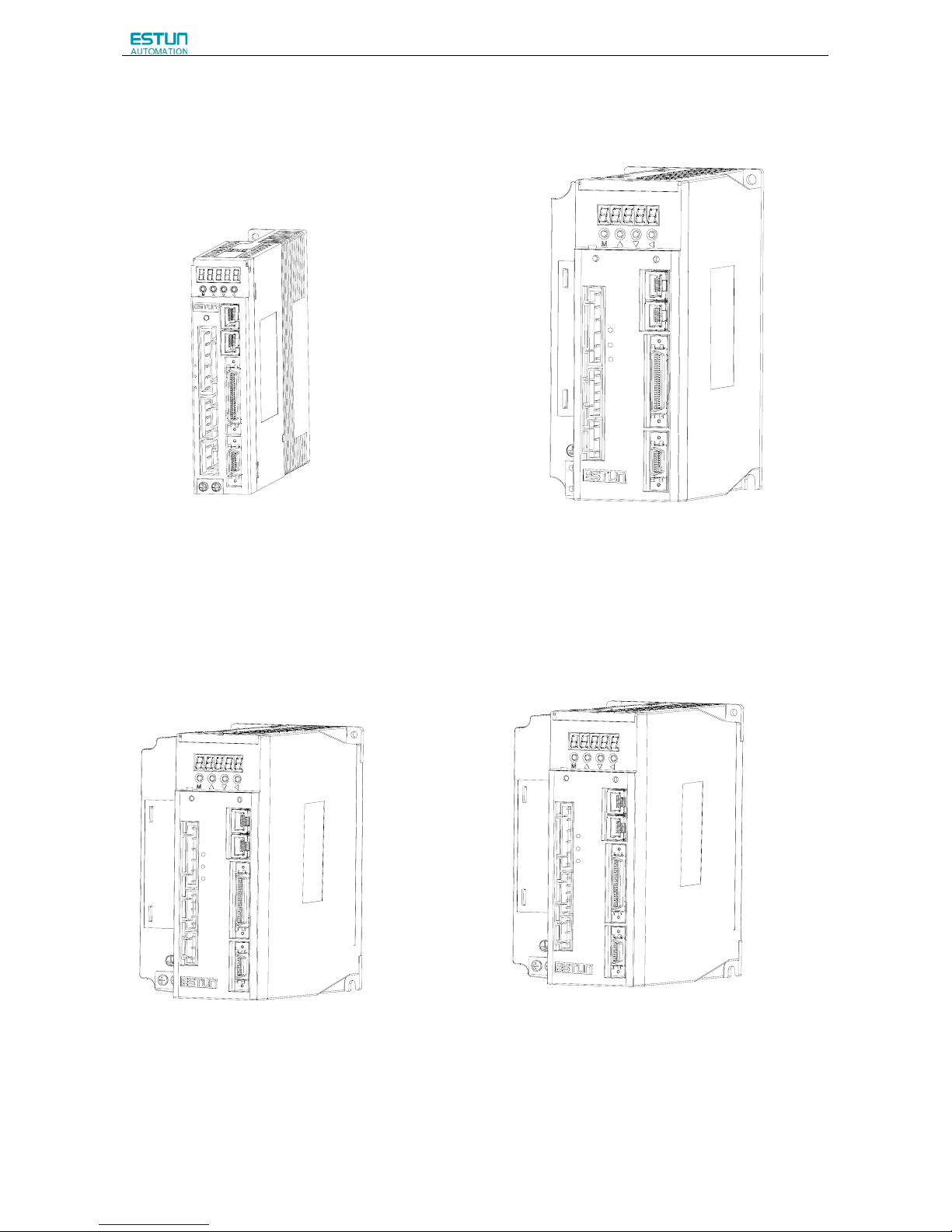
ProNet-1AD/1ED/2BD ProNet-02B
ProNet-04B ProNet-08B
ProNet Series AC Servo User's Manual
- 12 -
ProNet-E Servo Drive Appearance
ProNet-E-02A/04A ProNet-E-08A/10A
CN3CN4
CN1
CN2
L1
L2
FG
L1C
L2C
-
1
2
+
+
B1
B2
B3
W
V
U
CHARGE
L
1
L
2
L
3
C
N
3
C
N
4
C
N
1
C
N
2
L
1
C
L
2
C
B
1
B
2
B
3
U
V
W
+
-
1
+
2
C
H
A
R
G
E
P
O
W
E
R
ProNet-E-15A/20A ProNet-E-10D/15D/20D
L1
L2
L3
CN3
CN4
CN1
CN2
L1C
L2C
B1
B2
B3
U
V
W
+
-
1
+
2
CHARGE
POWER
L1
L2
L3
CN3
CN4
CN1
CN2
24V
GND
B1
B2
B3
U
V
W
+
-
1
+
2
CHARGE POWER
ProNet Series AC Servo User's Manual
- 13 -
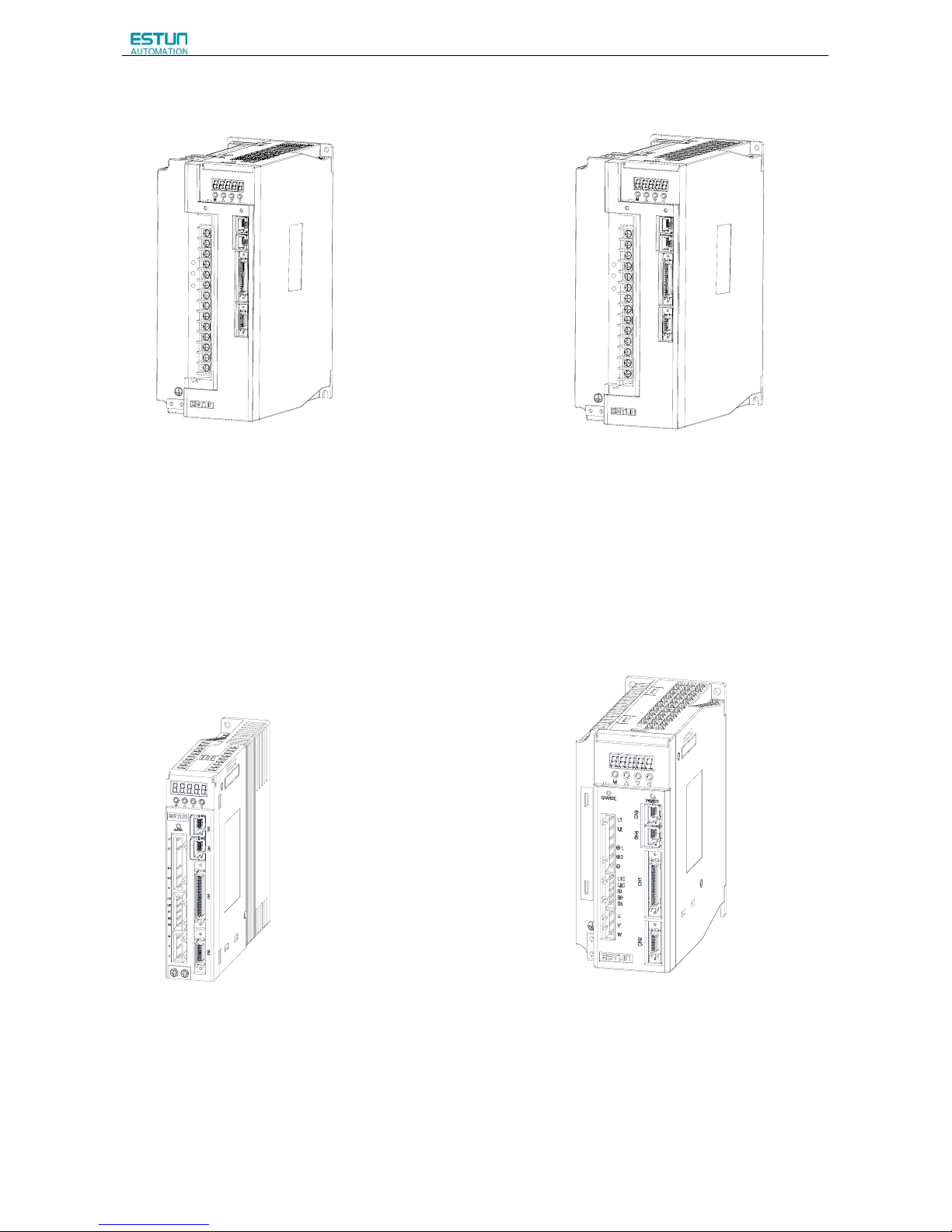
ProNet-E-30A/50A ProNet-E-30D/50D
CN3
CN4
CN1
CN2
CHARGE
POWER
L1
L2
L3
L1C
L2C
B1
B2
B3
U
V
W
+-1
+
2
CN3
CN4
CN1
CN2
CHARGE
POWER
L1
L2
L3
24V
GND
B1
B2
B3
U
V
W
+
-
1
+
2
ProNet-E-02B ProNet-E-04B
ProNet Series AC Servo User's Manual
- 14 -
ProNet-E-08B
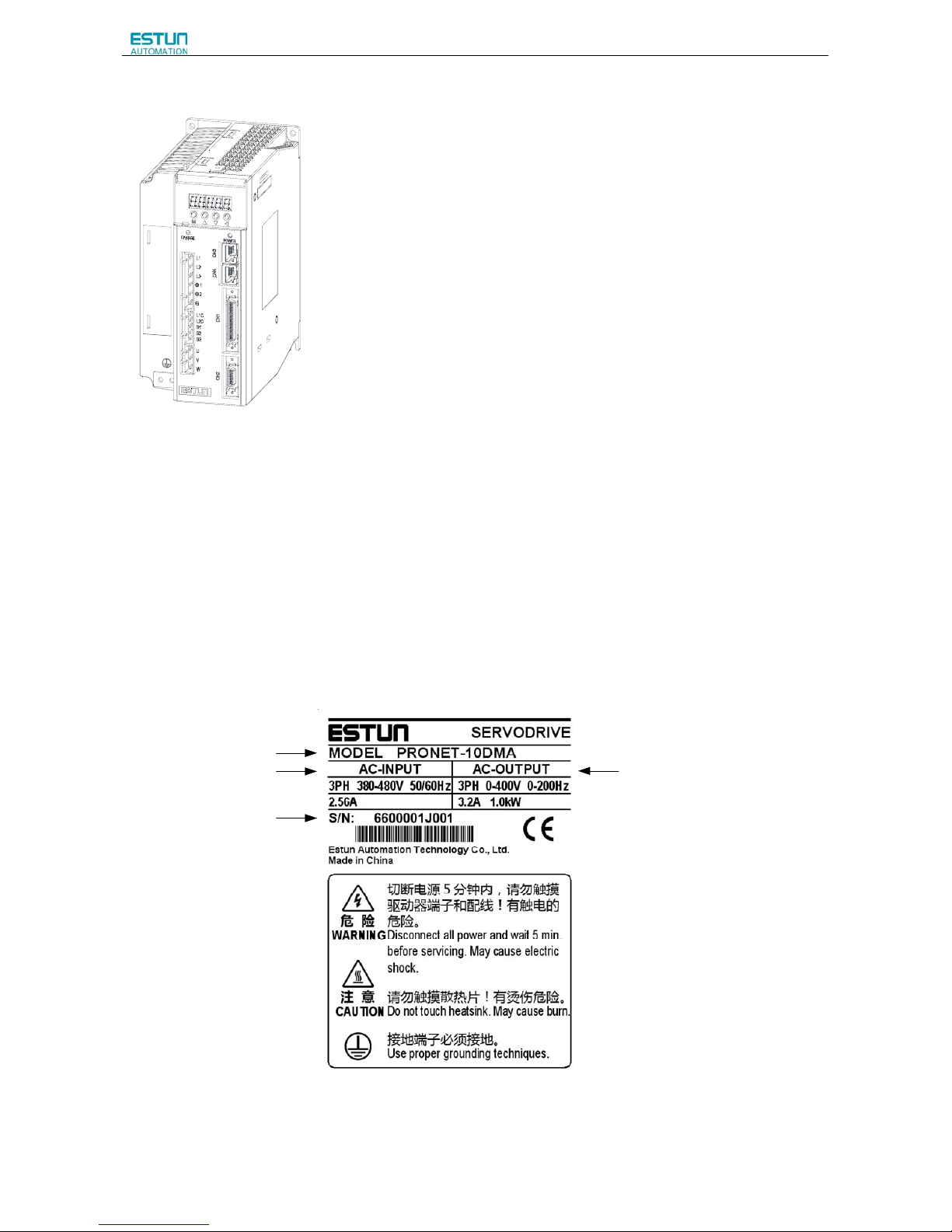
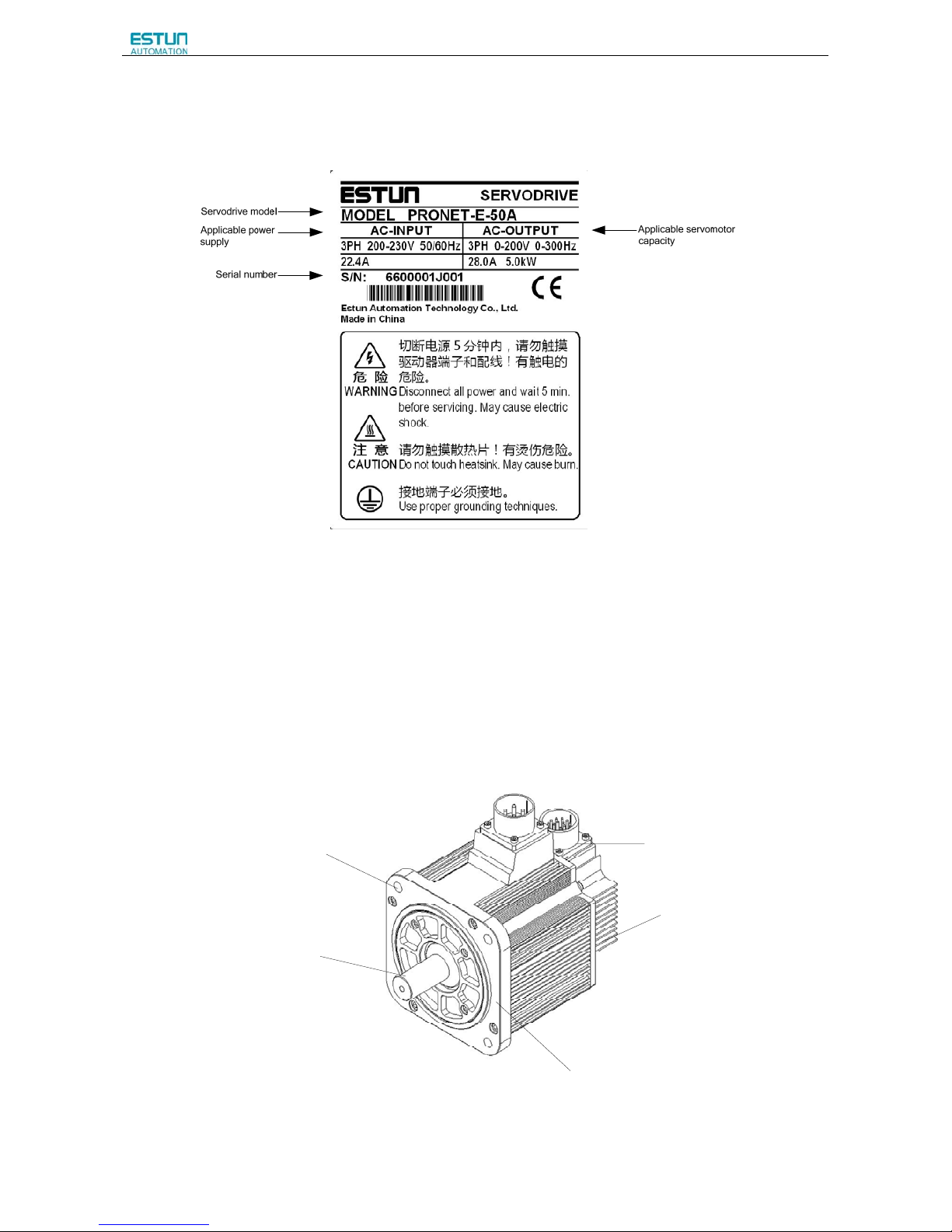
ProNet Servo Drive Nameplate
Servodrive model
Applicable power
supply
Applicable servomotor
capacity
Serial number
ProNet Series AC Servo User's Manual
- 15 -
ProNet-E Servo Drive Nameplate
1.2 Part Names
1.2.1 Servomotor
Servomotor without gear and brake.
Encoder
Shell
Flange
Output shaft
Mounting hole
ProNet Series AC Servo User's Manual
- 16 -
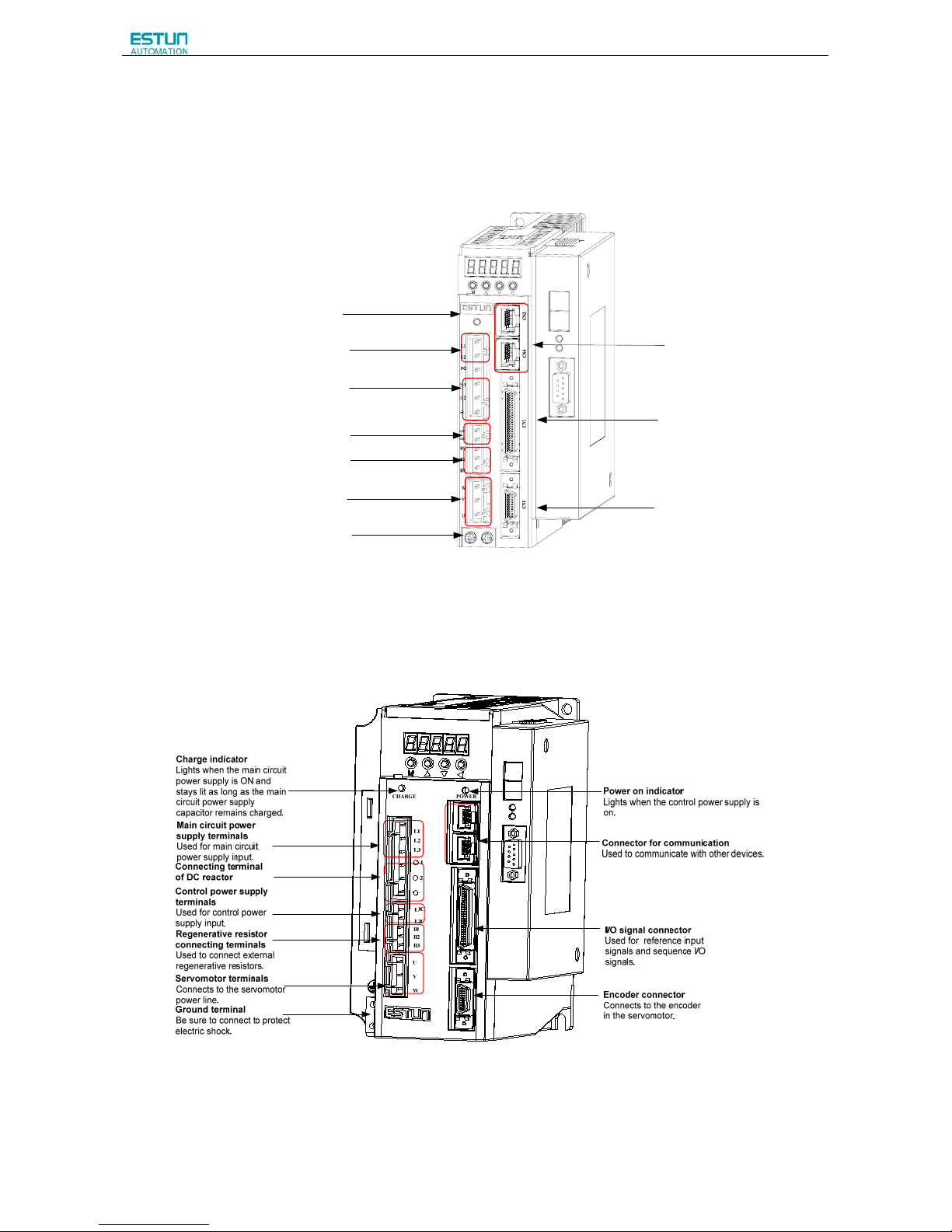
1.2.2 Servo drive
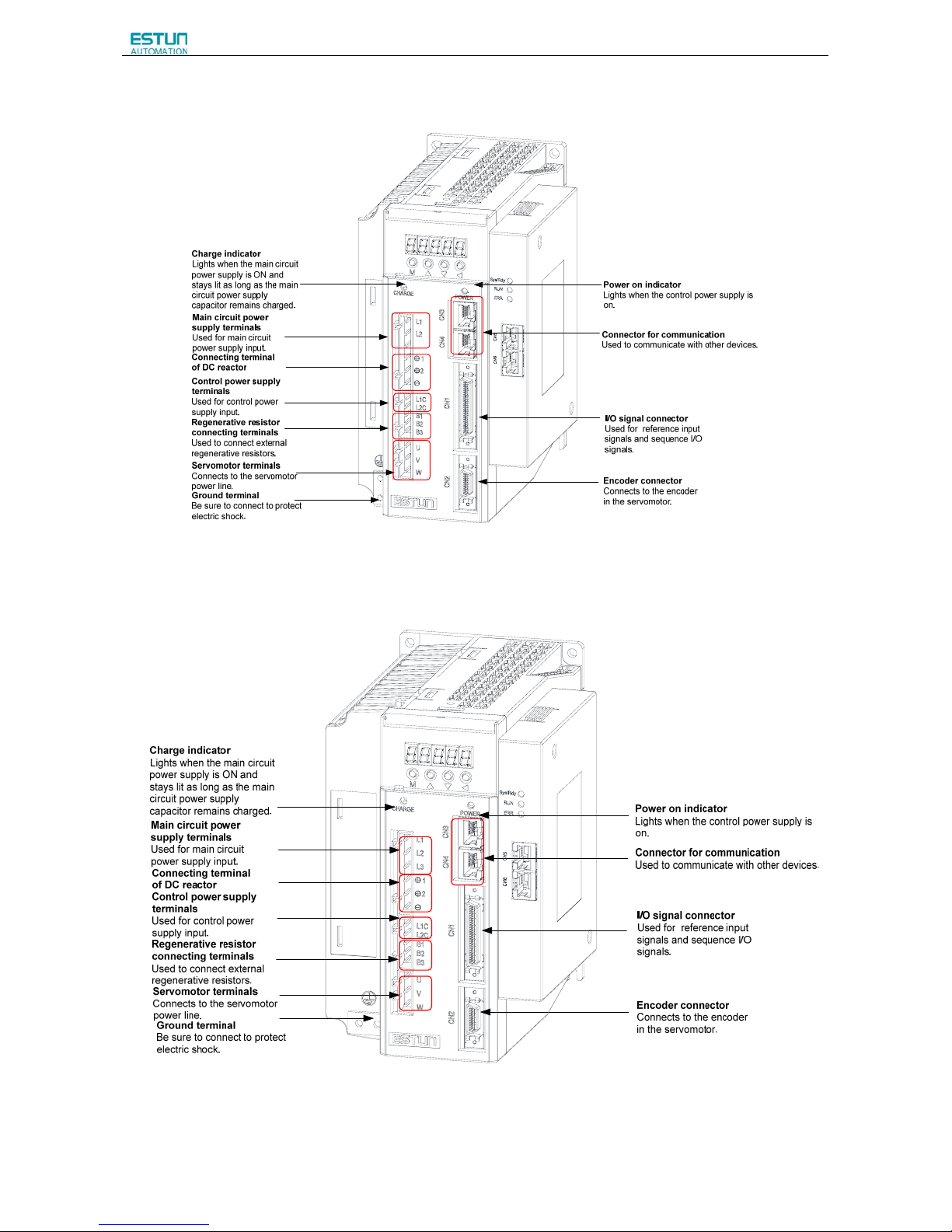
ProNet-02A/04A/ProNet-E-02A/04A
Charge indicator
Lights when the main circuit power supply is
ON and stays lit as long as the main circuit
power supply capacitor remains charged.
Ground terminal
Be sure to connect to protect electric shock.
Servomotor terminals
Connects to the servomotor power line.
Regenerative resistor connecting terminals
Used to connect external regenerative resistors.
Control power supply terminals
Used for control power supply input.
Connecting terminal of DC reactor
Main circuit power supply terminals
Used for main circuit power supply input.
Connector for communication
Used to communicate with other devices.
I/O signal connector
Used for reference input signals
and sequence I/O signals.
Encoder connector
Connects to the encoder in the
servomotor.
ProNet-08A/10A /ProNet-E-08A/10A
CN3
CN4
CN1
CN2
ProNet Series AC Servo User's Manual
- 17 -
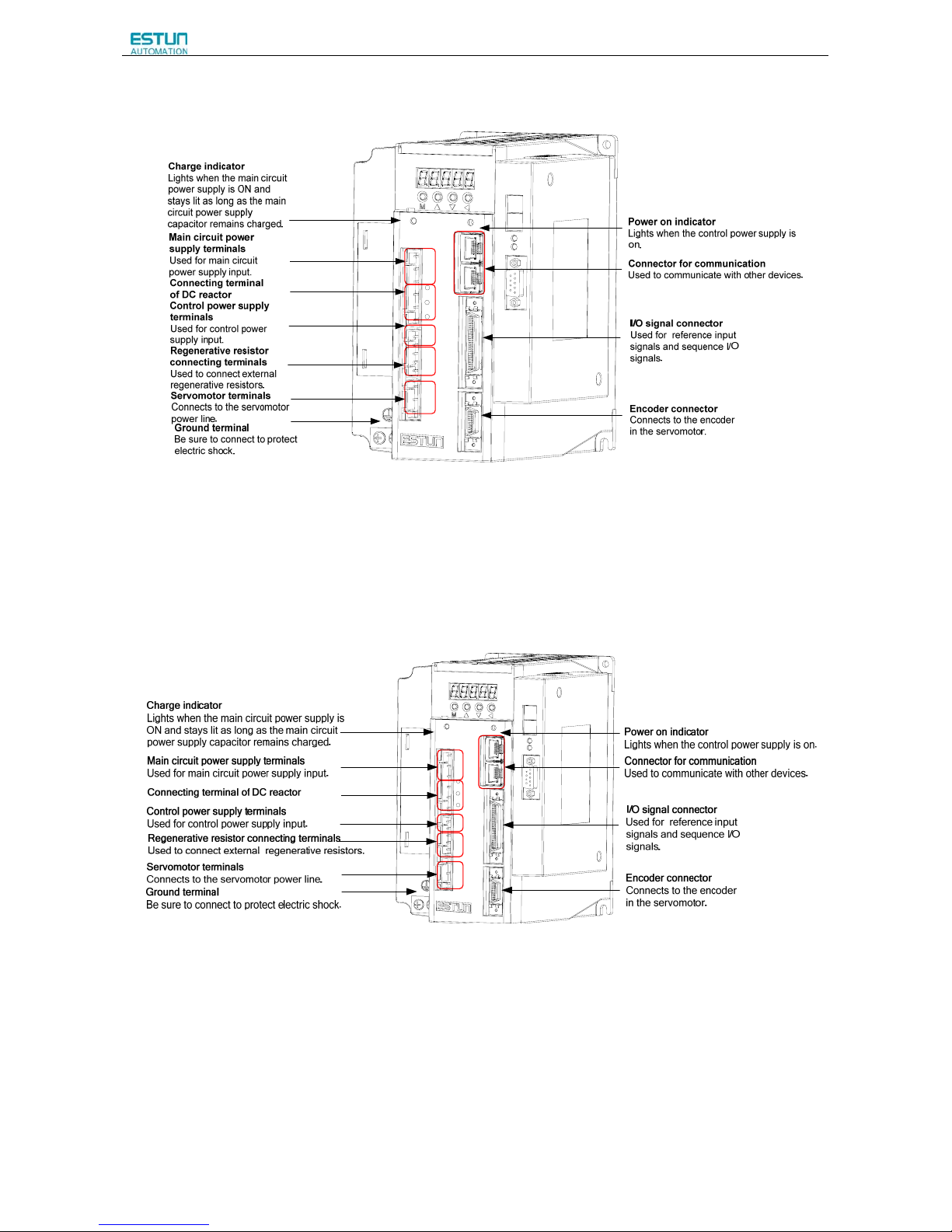
ProNet-15A/20A
/ ProNet-E-15A/20A
L1
L2
L3
CN3
CN4
CN1
CN2
L1C
L2C
B1
B2
B3
U
V
W
+
-
1
+
2
CHARGE
POWER
ProNet-10D/15D/20D/ProNet-E-10D/15D/20D
L1
L2
L3
CN3
CN4
CN1
CN2
24V
B1
B2
B3
U
V
W
+
-
1
+
2
CHARGE POWER
GND
ProNet Series AC Servo User's Manual
- 18 -
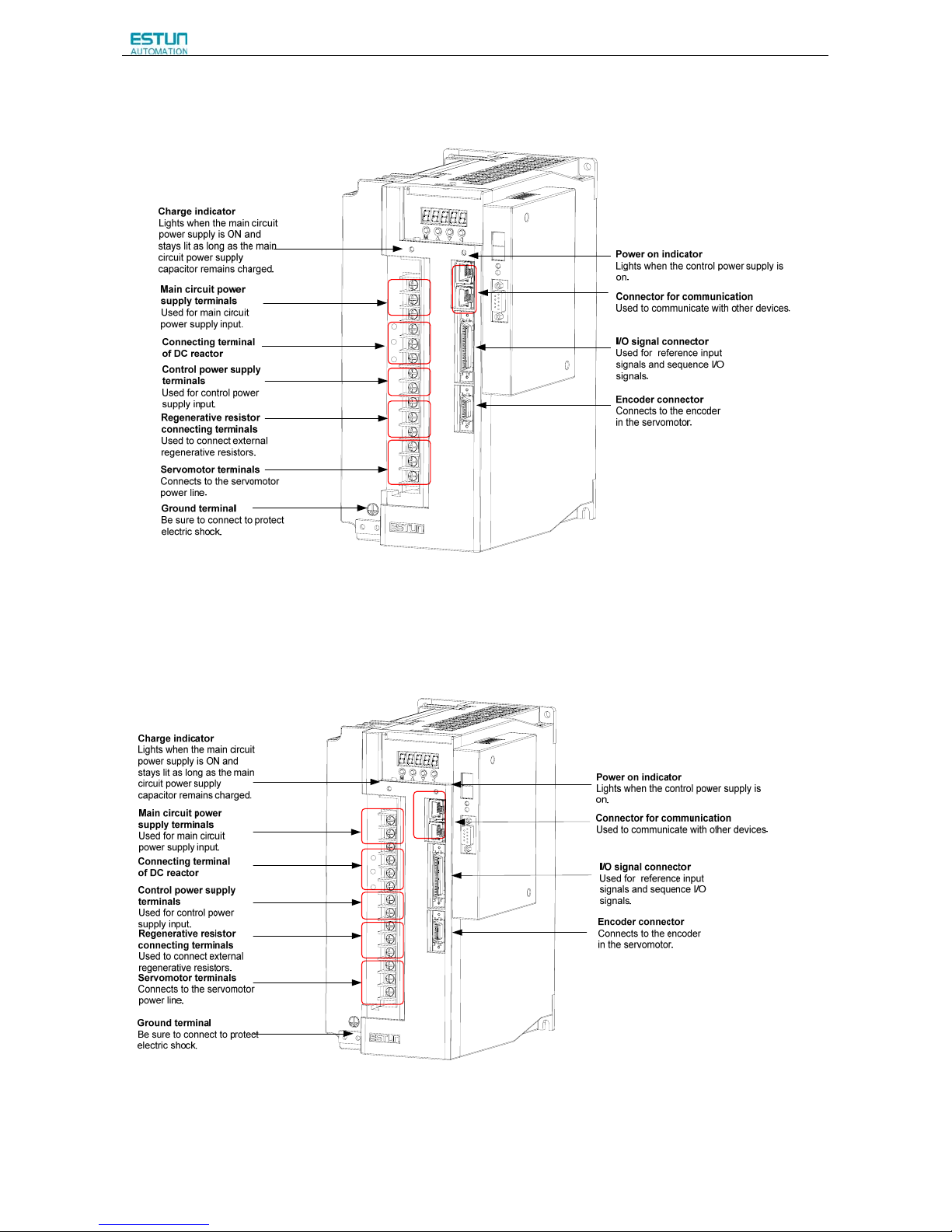
ProNet-30A/50A/ ProNet-E-30A/50A
CN3
CN4
CN1
CN2
CHARGE
POWER
L1
L2
L3
L1C
L2C
B1
B2
B3
U
V
W
+
-
1
+
2
ProNet-30D/50D/70D/75D/ ProNet-E-30D/50D
CN3
CN4
CN1
CN2
CHARGE
POWER
L1
L2
L3
24V
GND
B1
B2
B3
U
V
W
+
-
1
+
2

ProNet Series AC Servo User's Manual
- 19 -
ProNet-1AD/1ED/2BD
ProNet-02B/ProNet-E-02B
ProNet Series AC Servo User's Manual
- 20 -
ProNet-04B
/ProNet-E-04B
ProNet-08B /ProNet-E-08B
ProNet Series AC Servo User's Manual
- 21 -
Chapter 2
Installation
2.1 Servomotor
Servomotor can be installed either horizontally or vertically. However, if the servomotor is installed incorrectly, the
service life of the servomotor will be shortened or unexpected problems may occur.
Please observe the installation instructions described below to install the servomotor correctly.
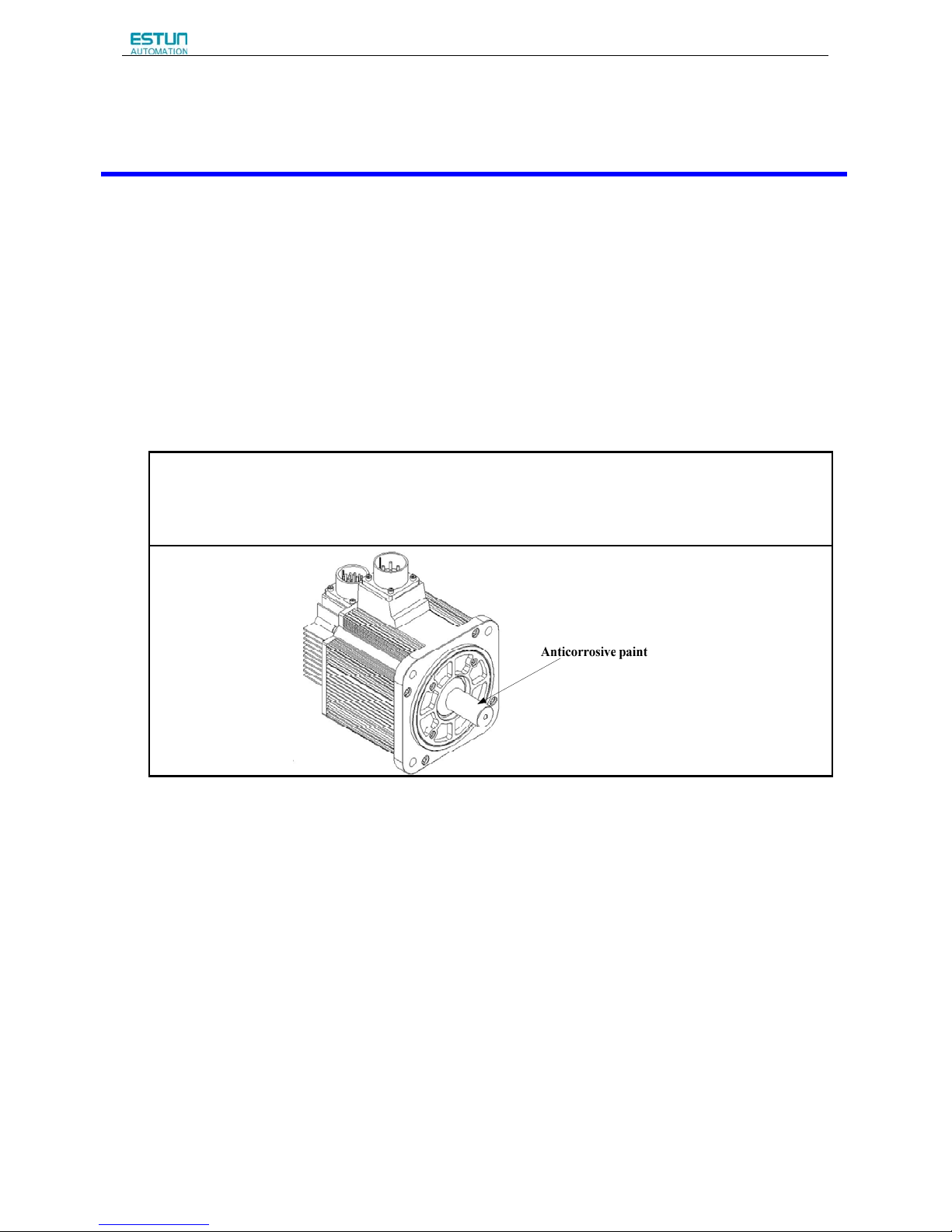
Before installation:
Anticorrosive paint is coated on the edge of the servomotor shaft. Clean off the anticorrosive paint thoroughly using
a cloth moistened with thinner.
Avoid getting thinner on other parts of the servomotor when cleaning the shaft.
2.1.1 Storage
When the servomotor is not being used, store it in an area with a temperature between -25℃ and 60℃ with the power
cable disconnected.
2.1.2 Installation Sites
The servomotor is designed for indoor use. Install the servomotor in an environment which meets the following
conditions.
z Free from corrosive and explosive gases.
z Well-ventilated and free from dust and moisture.
z Ambient temperature from 0 to 40℃.
z Relative humidity from 26% to 80%( non-condensing).
z Facilitates inspection and cleaning.
ProNet Series AC Servo User's Manual
- 22 -
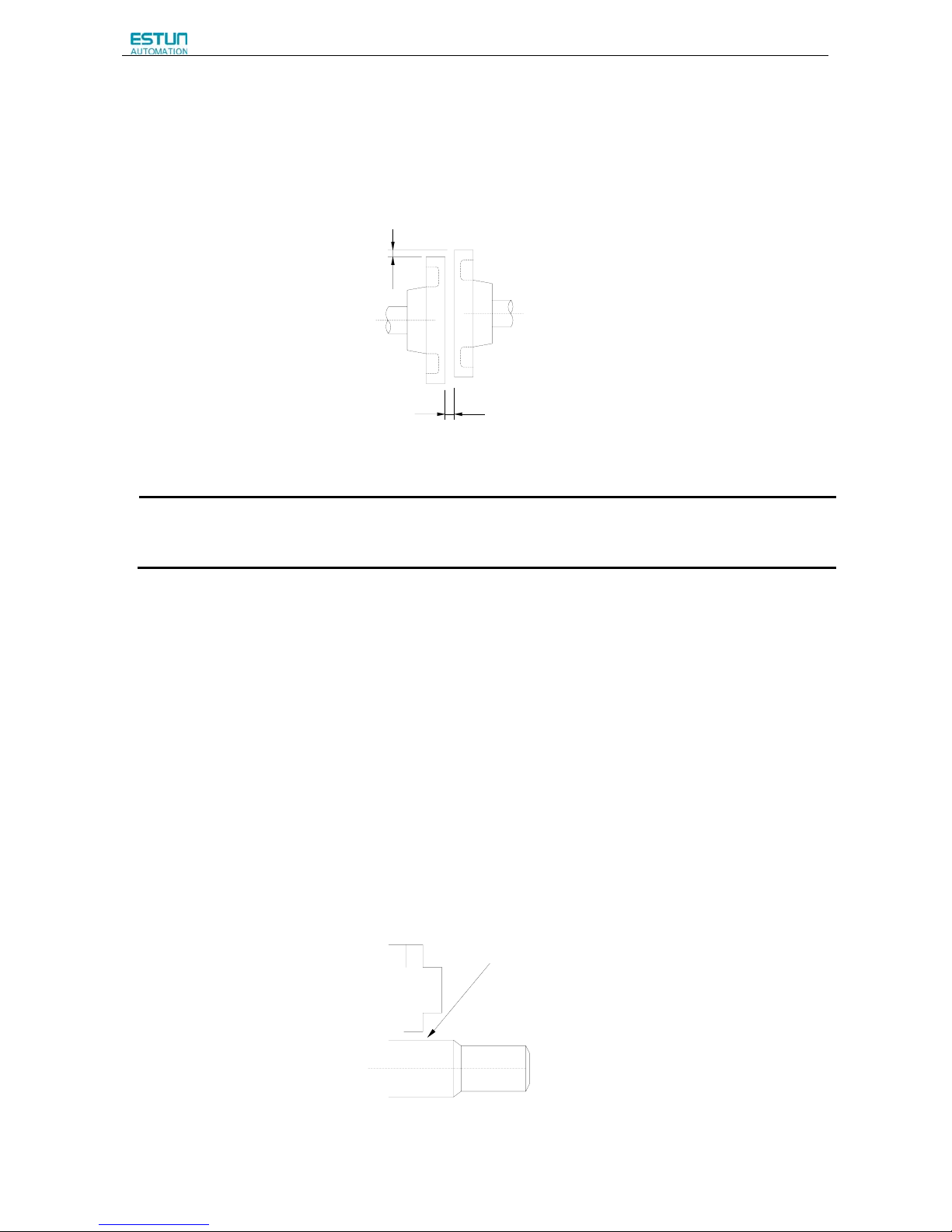
2.1.3 Installation Alignment
Align the shaft of the servomotor with that of the machinery shaft to be controlled. Then connect the two shafts with an
elastic coupling.
Install the servomotor so that alignment accurancy falls within the range shown below.
Measure this distance at four different positions in the circumference. The difference between the maximum and
minimum measurements must be 0.03mm or less.(Turn together with couplings.)
Note:
·If the alignment accurancy is incorrect , vibration will occur, resulting in damage to the bearings.
·Mechanical shock to the shaft end is forbidden, otherwise it may result in damage to the encoder of the servomotor.
2.1.4 Installation Orientation
Servomotor can be installed ethier horizontally or vertically.
2.1.5 Handling Oil and Water
If the servomotor is used in a location that is subject to water or oil drops, make sure of the servomotor protective
specification. If the servomotor is required to meet the protective specification to the through shaft section by default,
use a servomotor with an oil seal.
Through shaft section:
It refers to the gap where the shaft protrudes from the end of the servomotor.
Through Shaft Section
ProNet Series AC Servo User's Manual
- 23 -
2.1.6 Cable Tension
When connecting the cables, the bending radius should not be too small, do not bend or apply tension to cables.
Since the conductor of a signal cable is very thin (0.2 mm or 0.3 mm), handle it with adequate care.
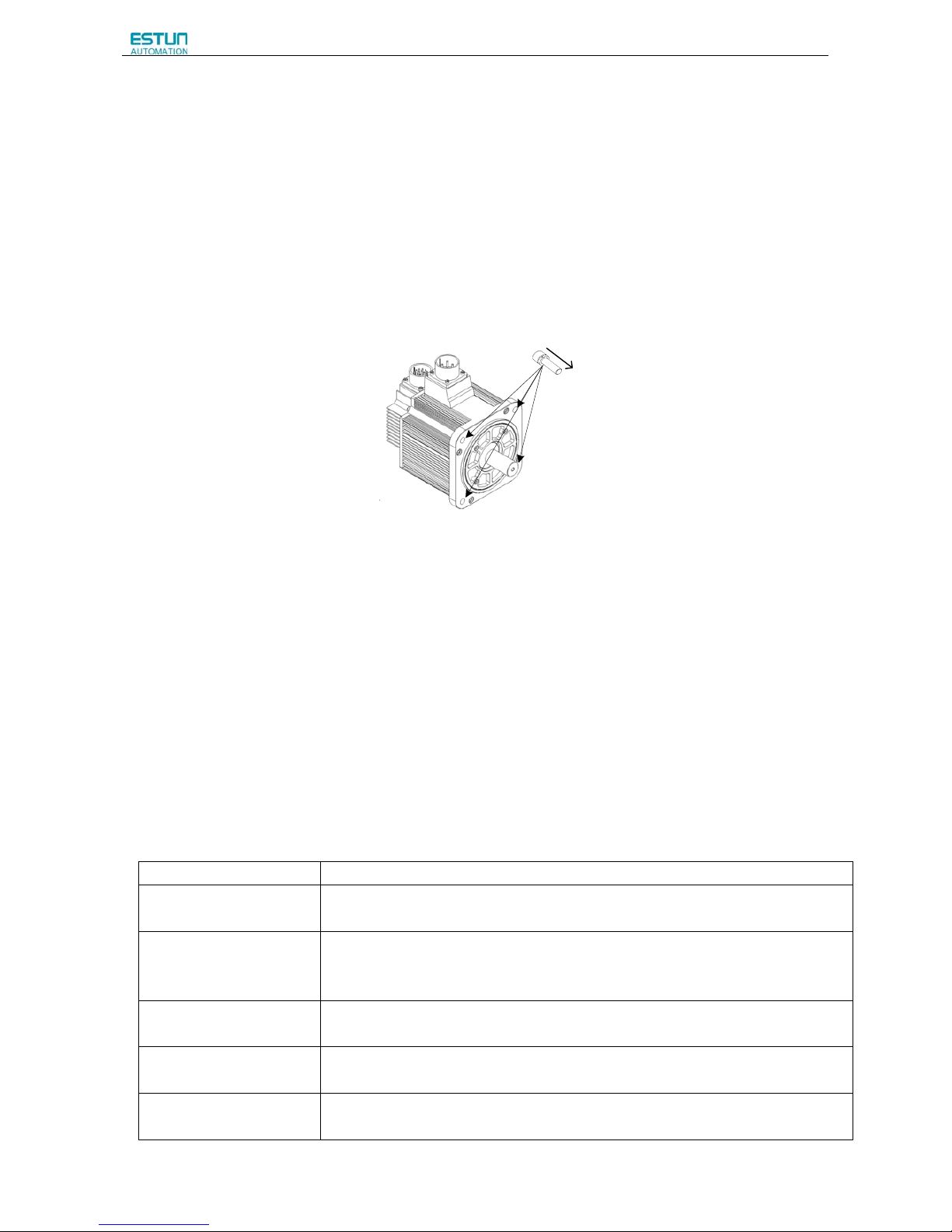
2.1.7 Install to the Client
When the servo motor is mounted to the client, please firmly secure the servo motor by the screws with backing ring
as shown in the figure.
I
n
s
t
a
l
l
a
t
i
o
n
o
r
i
e
n
t
a
t
i
o
n
2.2 Servo Drive
ProNet series servo drive is a base-mounted type. Incorrect installation will cause problems. Always observe the
installation instructions described below.
2.2.1 Storage
When the servomotor is not being used, store it in an area with a temperature between -25℃ and 55℃ with the
power cable disconnected.
2.2.2 Installation Sites
Notes on installation are shown below.
Situation Notes on installation
When installed in a control
panel
Design the control panel size, unit layout, and cooling method so that the temperature
around the periphery of the servo drive does not exceed 55℃.
When installed near a
heating unit
Suppress radiation heat from the heating unit and a temperature rise caused by
convection so that the temperature around the periphery of the servo drive does not
exceed 55℃.
When installed near a
source of vibration
Install a vibration isolator underneath the servo drive to prevent it from receiving vibration.
When installed in a location
subject to corrosive gases
Take appropriate action to prevent corrosive gases. Corrosive gases do not immediately
affect the servo drive, but will eventually cause contactor-related devices to malfunction.
Others
Avoid installation in a hot and humid site or where excessive dust or iron powder is
present in the air.
ProNet Series AC Servo User's Manual
- 24 -
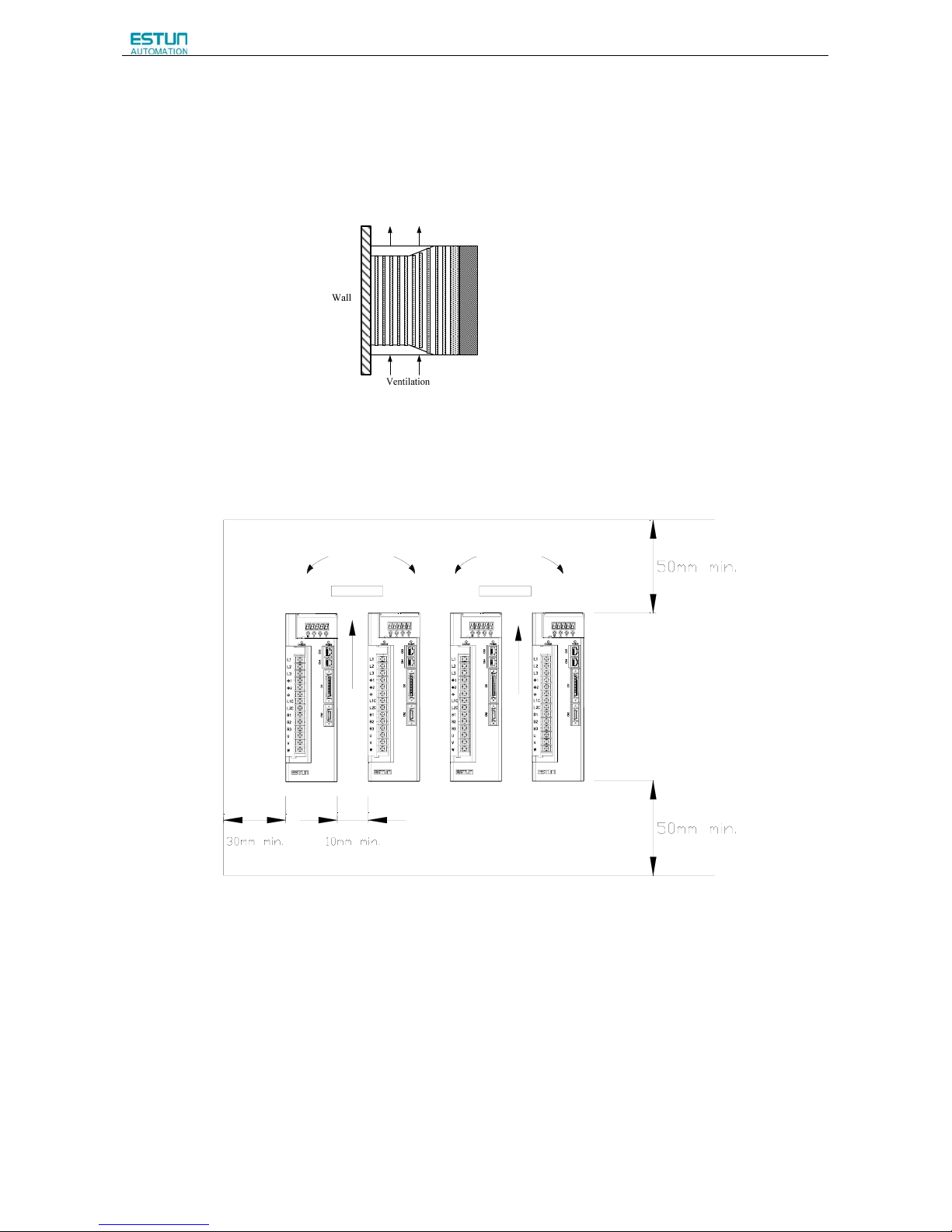
2.2.3 Installation Orientation
Install the servo drive perpendicular to the wall as shown in the figure. The servo drive must be oriented this way
because it is designed to be cooled by natural convection or a cooling fan if required. Firmly secure the servo drive
through two mounting holes.
2.2.4 Installation Method
When installing multiple servo drives side by side in a control panel, observe the following installation method.
Colling Fan
Colling Fan
■Installation Orientation
Install servo drive perpendicular to the wall so that the front panel (containing connectors) faces outward.
■Cooling
Provide sufficient space around each servo drive to allow cooling by natural convection or fans.
■Installing side by side
When installing servo drives side by side, provide at least 10mm space between each individual servo drive and at
least 50mm space above and below each one as well as shown in the figure above. Ensure the temperature inside the
control panel is evenly distributed, and prevent the temperature around each servo drive from increasing excessively.
Cooling Fan Cooling Fan

ProNet Series AC Servo User's Manual
- 25 -
Install cooling fans above the servo drives if necessary.
■Working conditions
1.Temperature:-20~ 55℃
2.Humidity:5%~95%RH
3.Vibration:4.9m/s
2
or less
4.Ambient temperature to ensure long-term reliability: 45 or less℃
5.Condensation and Freezing: None
ProNet Series AC Servo User's Manual
- 26 -
Chapter 3
Wiring
3.1 Main Circuit Wiring
Please observe the following instructions while wiring the main circuit.
· Do not bundle or run power and signal lines together in the same duct. Keep power and signal lines
separated by at least 300 mm.
· Use twisted-pair shielded wires or multi-core twisted-pair shielded wires for signal and encoder feedback
lines.
· The maximum length is 3 m for reference input lines and 20 m for encoder feedback lines.
· Do not touch the power terminals for 5 minutes after turning power OFF because high voltage may still
remain in the servo drive.
3.1.1 Names and Functions of Main Circuit Terminals
Terminal
Symbol
Name
Main
Circuit
Voltage(V)
Servo
Drive
Model
ProNet-
Servo
Drive
Model
Pronet-E-
Functions
L1,L2
Main circuit
power supply
input terminal
100
02B-08B 02B-08B
Single-phase 100~120VAC +10%~-15% (50/60Hz)
200 02A-04A 02A-04A
Single-phase 200~230VAC +10%~-15% (50/60Hz)
200 08A-50A 08A-50A
Three-phase 200~230VAC +10%~-15% (50/60Hz)
400
10D-75D 10D-50D Three-phase 380~480VAC +10%~-15% (50/60Hz)
1AD-2BD
-
Three-phase 380~440VAC +10%~-15% (50/60Hz)
FG FG 200 02A-04A 02A-04A Norma lly not connect ed.
U,V,W
Servomotor
connection
terminals
- - -
Connect to the servomotor.
L1C,L2C
Control circuit
power supply
input terminal
100
02B-08B 02B-08B
Single-phase 100~120VAC +10%~-15% (50/60Hz)
200 02A-50A 02A-50A
Single-phase 200~230VAC +10%~-15% (50/60Hz)
400
1AD-2BD
- Single-phase 380~440VAC +10%~-15% (50/60Hz)
24V,GND 10D-75D 10D-50D
24VDC +10%~-10%
Ground terminals
- - -
Connects to the power supply ground terminals and
servomotor ground terminal.
B1,B2,B3
External
regenerative
100
02B 02B
Connect an external regenerative resistor(provided
by customer) between B1 and B2.
200 02A-04A 02A-04A
ProNet Series AC Servo User's Manual
- 27 -
Terminal
Symbol
Name
Main
Circuit
Voltage(V)
Servo
Drive
Model
ProNet-
Servo
Drive
Model
Pronet-E-
Functions
resistor
connection
terminal
100
04B-08B 04B-08B
If using an internal regenerative resistor, please short
B2 and B3. Remove the wire between B2 and B3 and
connect an external regenerative resistor(provided
by customer) between B1 and B2, if the capacity of
the internal regenerative resistor is insufficient.
200 08A-50A 08A-50A
400
10D-75D 10D-50D
B1,B2 1AD-2BD
-
Connect an external regenerative resistor between
B1 and B2.
○
+ 1,○+ 2
DC reactor for
harmonic
suppression
terminal
200 02A-50A 02A-50A
Normally short ○+ 1and ○+2.
If a countermeasure against power supply harmonic
waves is needed, connect a DC reactor between ○+
1and ○+2.
400 10D-75D 10D-50D
○
-
Main circuit
minus terminal
200 02A-50A 02A-50A Norma lly not connect ed.
400 10D-75D 10D-50D
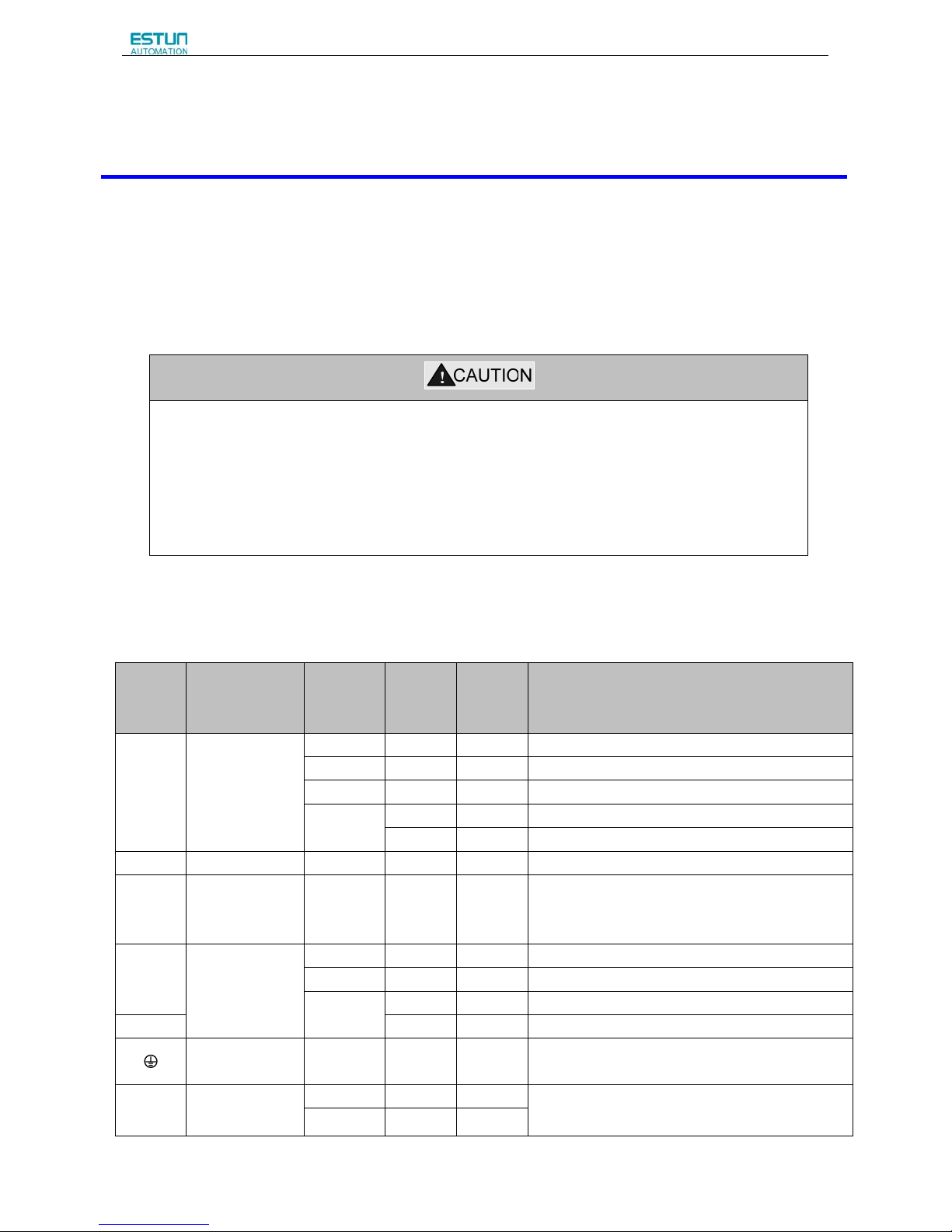
3.1.2 Typical Main Circuit Wiring Examples
Single-phase 200V ProNet-02A~04A/ Single-phase 200V ProNet-E-02A~04A
L1 L2
Single-phase 200~230V (50/60Hz)
+10%
-15%
Power OFF Pow er ON
1KM 1 SUP
1KM
1Ry
L1
L2
W
V
U
M
PG
A(1)
B(2)
C(3)
D(4)
L2C
L
1C
CN2
1Ry
1D
+24V
0V
1Ry
1PL (Servo Alarm Display)
ALM+7
ALM-
8
ProNet
Series Servodrive
1
2
Ground Terminal
Encoder
Servodrive
Magnetic Contactor
Molded-case Circuit Breaker
Surge Protector
Noise Filter
Be sure to connect a surge suppressor t o the
excitation coil of the magnetic contactor and relay.
B1
B2
B3
B1
B2
B3
External regenerator resistor
Note
1.The L1,L2,L3 and L1C,L2C terminals wiring method of ProNet-02A~04A/ProNet-E-02A~04A servo drives is different
from other ProNet series servo drives. Please note the specific terminal definition while wiring.
2.The main circuit power supply of ProNet-02A~04A/ProNet-E-02A~04A is Single-phase 200V
ProNet Series AC Servo User's Manual
- 28 -
3. External regenerative resistor for ProNet-02A~04A/ProNet-E-02A~04A is provided by customer, the model of 60W,
50Ωresistor is recommended.
4.Change Pn521.0 from “1” to “0” when using the external regenerative resistor in ProNet-02A~04A/ProNet-E-02A~04A
servo drives.
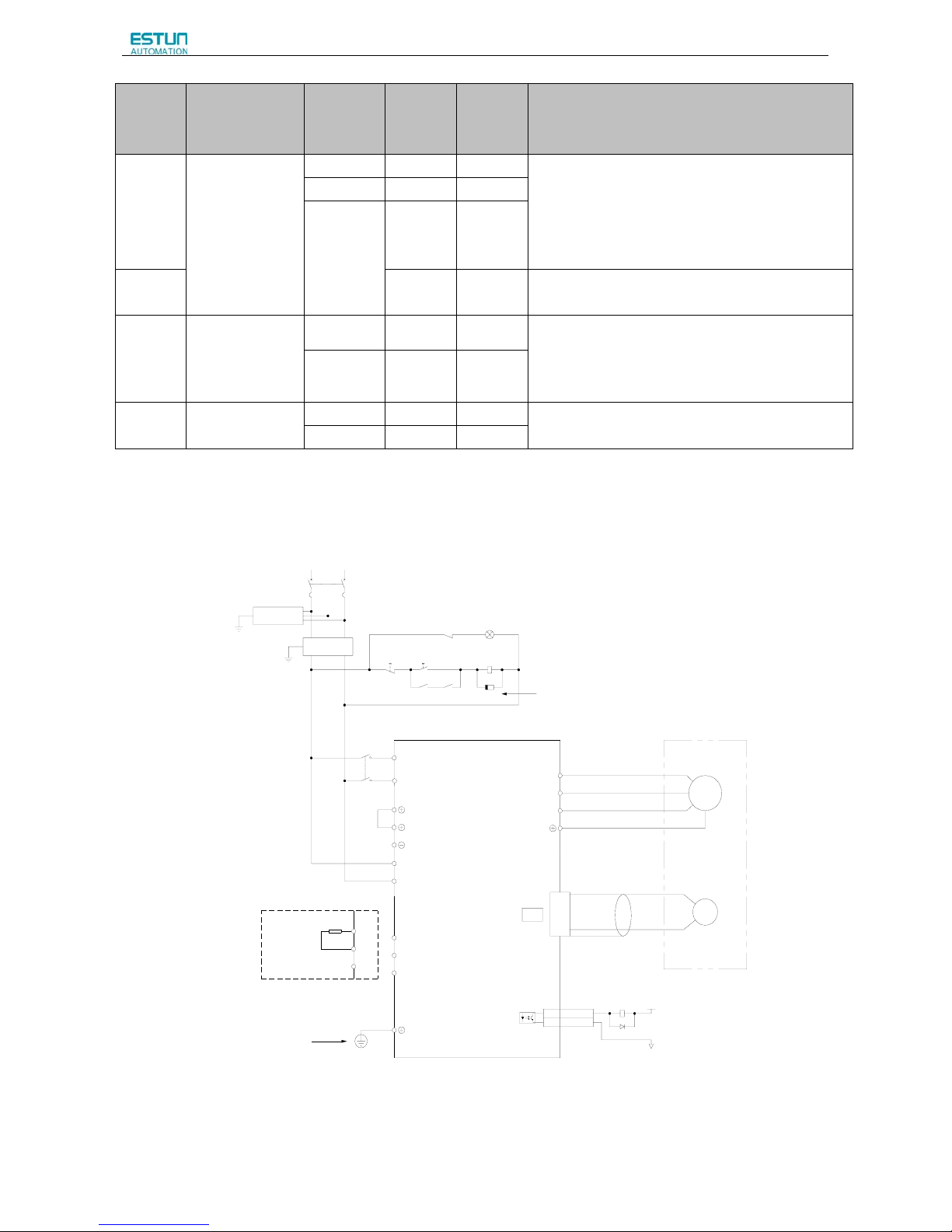
·Three-phase 200V ProNet-08A~50A/ Three-phase 200V ProNet-E-08A~50A
Noise Filter
L1 L2 L3
Three-phase 200~230V (50/60Hz)
+10%
-15%
Power OFF Power ON
1KM 1SUP
1KM
1Ry
L1
L2
L3
W
V
U
M
PG
Servomotor
Encoder
A(1)
B(2)
C(3)
D(4)
L2C
L
1C
CN2
1Ry
1D
+24V
0V
Surge Protector
Magnetic Contactor
Molded-case Circuit Breaker
1Ry
1PL (Servo Alarm Display)
ALM+7
ALM-
8
Be sure to connect a surge suppressor to the
excitation coil of the magnetic contactor and relay.
.
ProNet
Series Servodrives
1
2
B1
B2
B3
B2
B1
External Regenerator Resistor
B3
Ground Terminal
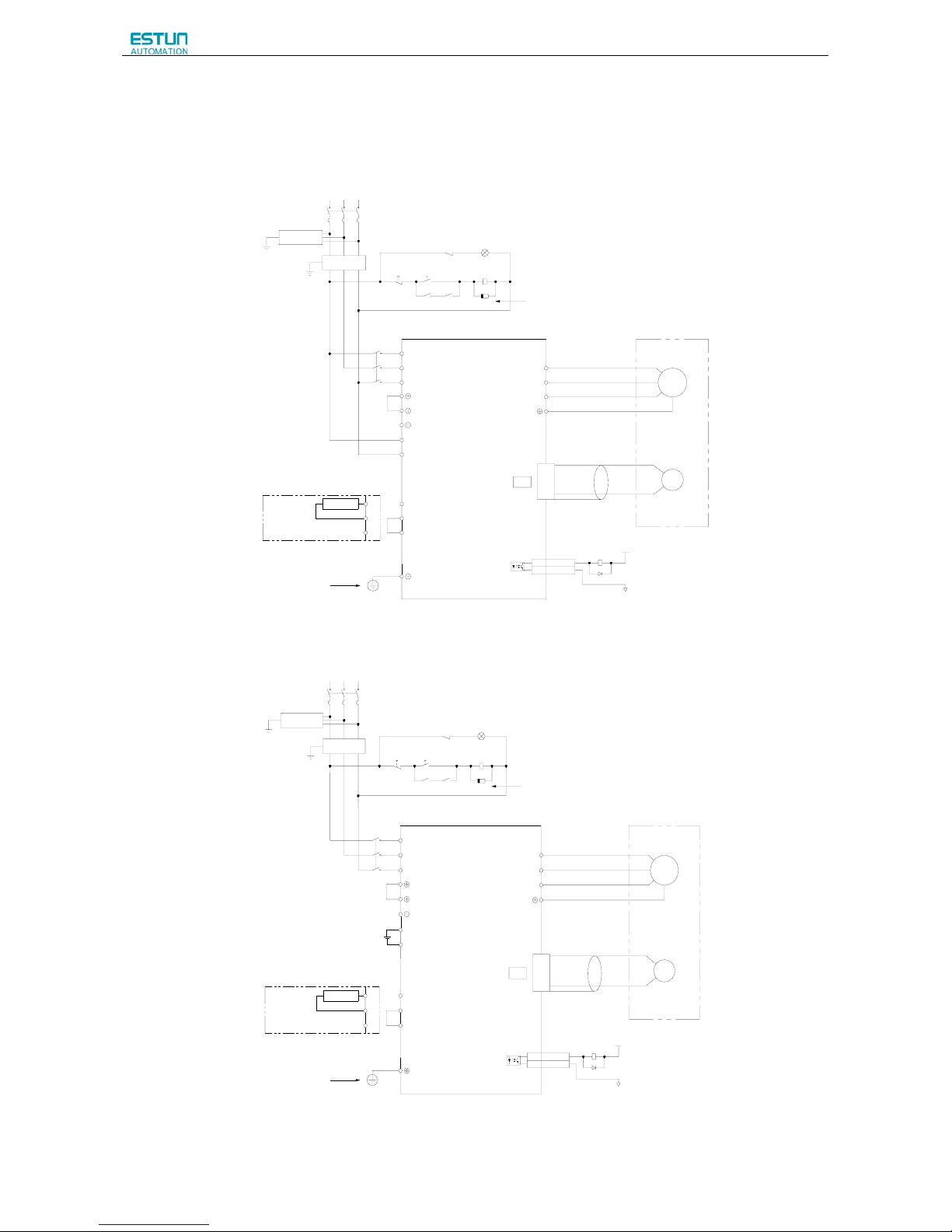
Three-phase 400V ProNet-10D~75D
/ Three-phase 400V ProNet-E-10D~50D
Noise Filter
L1 L2 L3
Three-phase 380~440V (50/60Hz)
+10%
-15%
Power OFF Power ON
1KM 1SUP
1KM
1Ry
L1
L2
L3
W
V
U
M
PG
Servomotor
Encoder
A(1)
B(2)
C(3)
D(4)
CN2
1Ry
1D
+24V
0V
Surge Protector
Magnetic Contactor
Molded-case Circuit Breaker
1Ry
1PL (Servo Alarm Display)
ALM+7
ALM-
8
Be sure to connect a surge su ppressor to the
excitation coil of the magnetic contactor and relay.
.
ProNet
Series Servodrives
1
2
B1
B2
B3
B2
B1
External Regenerator Resistor
B3
Ground Terminal
GND
24V
24VDC Power Supply
 Loading...
Loading...