


XCellerator
XC1300, XC2000
Instrucciones de uso
Translation of the original instructions
0463 623 001 XL 20190219
Valid for: serial no. 815-xxx-xxxx

TABLA DE CONTENIDO
1
SEGURIDAD................................................................................................ 5
1.1 Significado de los símbolos.................................................................. 5
1.2 Precauciones de seguridad................................................................... 5
1.3 Seguridad general.................................................................................. 8
1.3.1 Cumplimiento de las normas................................................................ 8
1.3.2 Requisito para el personal de servicio ................................................. 9
1.3.3 Equipo de protección personal............................................................. 9
1.4 Seguridad de instalación ....................................................................... 10
1.4.1 Instalación de la protección.................................................................. 10
1.5 Seguridad del cableado ......................................................................... 10
1.5.1 Toma de tierra de protección ................................................................ 11
1.5.2 Conexión equipotencial ........................................................................ 11
1.6 Liberación de persona atrapada en o por la máquina ........................ 11
1.7 Retiro de servicio, almacenamiento y eliminación ............................. 11
1.8 Diseño de seguridad .............................................................................. 12
1.9 Seguridad................................................................................................ 12
1.9.1 Fabricante ............................................................................................ 13
1.9.2 Normativas de salud y seguridad ......................................................... 13
1.9.3 Seguridad del arco ............................................................................... 14
1.9.4 Mantenimiento...................................................................................... 15
1.9.5 Garantía ............................................................................................... 15
1.9.6 Instalación ............................................................................................ 16
1.9.7 Operación manual ................................................................................ 16
2
INTRODUCCIÓN.......................................................................................... 17
2.1 Uso previsto............................................................................................ 17
2.2 Equipo ..................................................................................................... 17
3
CARACTERÍSTICAS TÉCNICAS................................................................ 18
3.1 Especificaciones funcionales ............................................................... 18
3.1.1 Ajuste de parámetros ........................................................................... 18
3.1.2 Posición................................................................................................ 18
3.2 Datos técnicos........................................................................................ 18
3.3 Cálculo de desviación............................................................................ 19
4
INSTALACIÓN ............................................................................................. 21
4.1 Instrucciones para el izado ................................................................... 21
4.1.1 Utilización de una carretilla elevadora.................................................. 21
4.2 Montaje.................................................................................................... 22
4.2.1 Ajuste aproximado................................................................................ 23
4.2.2 Anclaje.................................................................................................. 26
4.2.3 Conexión del sistema de escape ......................................................... 27
4.2.4 Conexión .............................................................................................. 27
4.2.5 Montaje de equipo opcional ................................................................. 28
0463 623 001 © ESAB AB 2019

TABLA DE CONTENIDO
4.3 Cableado ................................................................................................. 28
4.3.1 Conexión al controlador del robot ........................................................ 28
4.4 Componentes de seguridad .................................................................. 31
4.5 Antes de la primera puesta en marcha ................................................ 31
4.5.1 Ajuste de parámetros ........................................................................... 32
4.5.2 Prueba inicial........................................................................................ 32
4.6 Condiciones ambientales...................................................................... 32
4.7 Alimentación externa............................................................................. 32
4.7.1 Tensión................................................................................................. 32
4.7.2 Neumático (opcional) ........................................................................... 32
5
FUNCIONAMIENTO..................................................................................... 34
5.1 Medidas antes de empezar.................................................................... 34
5.2 Inicie el robot en el colgante de programación................................... 35
5.3 Liberación de personas atrapadas en el XCellerator.......................... 35
5.4 Colocación de los componentes de seguridad................................... 38
5.5 Función del sistema de seguridad ....................................................... 38
5.6 Paradas ................................................................................................... 38
5.7 Parada de emergencia ........................................................................... 39
5.8 Parada de seguridad .............................................................................. 39
5.9 Panel de control...................................................................................... 40
5.10 Colgante de programación .................................................................... 40
6
MANTENIMIENTO ....................................................................................... 43
6.1 General .................................................................................................... 43
6.2 Mantenimiento ........................................................................................ 43
6.2.1 Cronograma de mantenimiento de base de XCellerator ...................... 43
6.2.2 Posiciones de mantenimiento 0459990668 y 0459990670.................. 45
6.2.3 Posicionador de mantenimiento de V2TR-500D5 ................................ 46
6.2.3.1 Compruebe la unidad de transferencia de corriente y el disco de
tierra ..................................................................................................
6.2.3.2 Compruebe la correa de distribución de tensión............................... 48
6.3 Unidades de servo ................................................................................. 49
6.3.1 General................................................................................................. 49
6.3.2 Engranaje de reducción ....................................................................... 49
6.3.3 Servo de CA ......................................................................................... 49
48
7
SOLUCIÓN DE PROBLEMAS .................................................................... 50
7.1 Mensajes de error................................................................................... 50
7.2 Esquema de alarma................................................................................ 50
7.3 Información de contacto de servicio .................................................... 51
7.3.1 Información de contacto ....................................................................... 52
8
PEDIDO DE PIEZAS DE REPUESTO......................................................... 53
DIMENSIÓN ......................................................................................................... 54
0463 623 001 © ESAB AB 2019

TABLA DE CONTENIDO
ÁREAS DE TRABAJO ........................................................................................ 55
ACCESORIOS ..................................................................................................... 56
ACCESORIOS ..................................................................................................... 57
PIEZAS DE DESGASTE...................................................................................... 59
Se reserva el derecho de modificar las especificaciones sin previo aviso.
0463 623 001 © ESAB AB 2019

1 SEGURIDAD
1 SEGURIDAD
1.1 Significado de los símbolos
Según se utilizan en este manual: Significa ¡Atención! ¡Tenga cuidado!
¡PELIGRO!
Significa peligros inmediatos que, si no se evitan, causarán lesiones
personales graves o incluso la pérdida de la vida.
¡ADVERTENCIA!
Significa peligros potenciales que podrían causar lesiones personales o la
pérdida de la vida.
¡PRECAUCIÓN!
Significa peligros que podrían causar lesiones personales menores.
¡ADVERTENCIA!
Antes de utilizar el equipo, lea y comprenda el manual
de instrucciones y siga todas las etiquetas, las prácticas
de seguridad del empleador y las hojas de datos de
seguridad (SDS, por sus siglas en inglés).
1.2 Precauciones de seguridad
Los usuarios del equipo ESAB tienen la absoluta responsabilidad de garantizar que toda
persona que trabaje con el equipo o cerca de este respete todas las precauciones de
seguridad correspondientes. Las precauciones de seguridad deben cumplir con los
requisitos que se aplican a este tipo de equipo. Se deben tener en cuenta las siguientes
recomendaciones, además de las regulaciones estándar que se aplican en el lugar de
trabajo.
Todo trabajo debe ser realizado por personal capacitado que esté familiarizado con la
operación del equipo. La operación incorrecta del equipo podría generar situaciones
peligrosas que pueden ocasionar lesiones al operador y daños al equipo.
1. Toda persona que utilice el equipo debe estar familiarizada con:
○ su operación
○ la ubicación de las paradas de emergencia
○ su función
○ las precauciones de seguridad correspondientes
○ las operaciones de soldadura y corte u otras operaciones aplicables del equipo
2. El operador debe garantizar que:
○ no haya ninguna persona no autorizada en el área de trabajo cuando se
arranque el equipo
○ no haya ninguna persona sin protección cuando se golpee el arco o se inicie el
trabajo con el equipo
3. El lugar de trabajo debe:
○ ser adecuado para la operación
○ estar libre de corrientes de aire
0463 623 001
- 5 -
© ESAB AB 2019
1 SEGURIDAD
4. Equipo de seguridad personal:
○ Use siempre el equipo de seguridad personal recomendado, como gafas
protectoras, prendas ignífugas y guantes de seguridad
○ No use accesorios que suelen quedar holgados, como bufandas, pulseras,
anillos, etc. que podrían quedar atrapados u ocasionar quemaduras
5. Precauciones generales:
○ Asegúrese de que el cable de retorno esté bien conectado
○ Los trabajos en el equipo de alta tensión solo pueden ser realizados por un
electricista calificado
○ El equipo extintor de incendios adecuado debe estar muy cerca y claramente
marcado
○ No se debe realizar la lubricación ni el mantenimiento del equipo durante la
operación
¡ADVERTENCIA!
El corte y la soldadura por arco pueden ser perjudiciales para usted y otras
personas. Tome precauciones al soldar y cortar.
La DESCARGA ELÉCTRICA puede ser mortal
• Instale y conecte a tierra la unidad según el manual de instrucciones.
• No toque las piezas eléctricas con tensión o electrodos con la piel, con
guantes húmedos ni con la ropa húmeda.
• Utilice elementos aislantes.
• Asegúrese de que la posición para trabajar sea segura
Los CAMPOS ELÉCTRICOS Y MAGNÉTICOS pueden ser peligrosos para
su salud
• Los soldadores que usan marcapasos deben consultar a su médico antes
de soldar. Los EMF podrían interferir con algunos marcapasos.
• La exposición a EMF podría tener otras consecuencias para la salud que
son desconocidas.
• Los soldadores deben utilizar los siguientes procedimientos para minimizar
la exposición a EMF:
○ Pase el electrodo y los cables de trabajo juntos a un mismo lado del
cuerpo. Sujételos con cinta si es posible. No coloque el cuerpo entre
los cables de trabajo y del soplete. Nunca debe enrollarse el cable
de trabajo o soplete por el cuerpo. Mantenga los cables y la fuente
de alimentación de soldadura lo más lejos posible del cuerpo.
○ Conecte el cable de trabajo a la pieza de trabajo lo más cerca
posible al área que se soldará.
Los HUMOS Y GASES pueden ser peligrosos para su salud
• Protéjase la cabeza de los humos.
• Utilice ventilación, extracción en el arco o ambas para expulsar los humos
y gases de la zona de respiración y del área en general.
Los ARCOS ELÉCTRICOS pueden causar lesiones en los ojos y
quemaduras en la piel
0463 623 001
• Protéjase los ojos y el cuerpo. Utilice la pantalla para soldar y las lentes
filtradoras correctas y use vestimenta protectora.
• Proteja a las personas que se encuentran en el lugar utilizando pantallas o
cortinas adecuadas.
- 6 -
© ESAB AB 2019

1 SEGURIDAD
RUIDO: el ruido excesivo puede dañar la audición
Protéjase los oídos. Utilice orejeras o alguna otra protección para los oídos.
Las PIEZAS MÓVILES pueden causar lesiones
• Mantenga todos los paneles, las puertas y las cubiertas cerrados y bien
seguros en su lugar. Si es necesario, solo personal calificado puede retirar
cubiertas para realizar mantenimiento o solucionar problemas. Vuelva a
instalar los paneles o las cubiertas y cierre las puertas cuando haya
finalizado el servicio y antes de arrancar el motor.
• Detenga el motor antes de instalar o conectar la unidad.
• Mantenga las manos, el cabello, la ropa holgada y las herramientas
alejadas de las piezas móviles.
PELIGRO DE INCENDIO
• Las chispas (salpicaduras) pueden causar incendios. Asegúrese de que
no haya materiales inflamables cerca.
• Evite que se produzcan en contenedores cerrados.
FUNCIONAMIENTO INCORRECTO: llame al servicio de asistencia de expertos en
caso de falla.
¡PROTÉJASE Y PROTEJA A LAS OTRAS PERSONAS!
¡PRECAUCIÓN!
Este producto está destinado únicamente a la soldadura por arco y a los procesos
de aleación.
¡PRECAUCIÓN!
Los equipos clase A no se pueden utilizar en
residencias donde la energía eléctrica es suministrada
por el sistema público de baja tensión. Podrían surgir
algunas dificultades al garantizar la compatibilidad
electromagnética de los equipos clase A en esas
ubicaciones debido a las perturbaciones conducidas y
radiadas.
0463 623 001
- 7 -
© ESAB AB 2019

1 SEGURIDAD
¡NOTA!
¡Deseche los equipos electrónicos en la instalación
de reciclaje!
En cumplimiento con la normativa europea 2012/19/EC
sobre cómo desechar los equipos eléctricos y
electrónicos y su implementación de acuerdo con la
legislación nacional, los equipos eléctricos y/o
electrónicos que han alcanzado el fin de su vida útil se
deben desechar en una instalación de reciclaje.
Como la persona responsable del equipo, es su
responsabilidad obtener información sobre las
estaciones de recolección aprobadas.
Para obtener más información, comuníquese con el
distribuidor de ESAB más cercano.
ESAB cuenta con una gran variedad de accesorios de soldadura y equipos de
protección personal a la venta. Para obtener información relacionada con pedidos,
comuníquese con su distribuidor local de ESAB o visite nuestro sitio web.
1.3 Seguridad general
Esta maquinaria cumple con todas las disposiciones pertinentes de la Directiva 2006/42/CE
relativa a las máquinas.
Además, esta maquinaria cumple con todas las disposiciones pertinentes de la Directiva
2004/108/CE sobre compatibilidad electromagnética (EMC).
La “Declaración de conformidad CE” con la marca CE posterior, adjunta a esta maquinaria,
solo es válida si se instaló esta maquinaria en conformidad con las instrucciones de
instalación de este manual.
La responsabilidad de YASKAWA Nordic AB no abarca los errores o los riesgos de
seguridad que puedan ocurrir en el equipo conectado o instalado a la máquina, ni los errores
o los riesgos de seguridad que puedan ocurrir en la máquina debido al equipo conectado o
instalado a la máquina.
1.3.1 Cumplimiento de las normas
Esta máquina se desarrolló y fabricó de acuerdo con las disposiciones pertinentes de las
siguientes normas armonizadas:
• EN 349:1993+A1:2008 Seguridad de las máquinas. Distancias mínimas para evitar el
aplastamiento de partes del cuerpo humano
• EN 574:1996+A1:2008 Seguridad de las máquinas: Dispositivos de mando a dos
manos: Aspectos funcionales: Principios de diseño
• EN 953:1997+A1:2009 Seguridad de las máquinas. Resguardos. Requisitos generales
para el diseño y construcción de resguardos fijos y móviles
• EN ISO 13849-1:2008 Seguridad de las máquinas. Partes de los sistemas de mando
relativas a la seguridad. Parte 1: Principios generales para el diseño
• EN ISO 13849-2:2012 Seguridad de las máquinas. Partes de los sistemas de mando
relativas a la seguridad. Parte 2: Validación
• EN ISO 13855:2010 Seguridad de las máquinas. Posicionamiento de los protectores
con respecto a la velocidad de aproximación de partes del cuerpo humano.
• EN 1037:1995+A1:2008 Seguridad de las máquinas. Prevención de una puesta en
marcha intempestiva
0463 623 001
- 8 -
© ESAB AB 2019

1 SEGURIDAD
• EN ISO 10218-1:2011 Robots y dispositivos robóticos. Requisitos de seguridad para
robots industriales. Parte1: Robots
• EN ISO 10218-2:2011 Robots y dispositivos robóticos. Requisitos de seguridad para
robots industriales. Parte2: Sistema e integración de robots
• EN ISO 12100:2010 Seguridad de las máquinas. Principios generales para el diseño.
Evaluación del riesgo y reducción del riesgo.
• EN ISO 13850:2008 Seguridad de las máquinas. Parada de emergencia. Principios
para el diseño
• EN ISO 13857:2008 Seguridad de las máquinas. Distancias de seguridad para impedir
que se alcancen zonas peligrosas con los miembros superiores e inferiores
• EN 60204-1:2006+A1:2009 Seguridad de las máquinas. Equipo eléctrico de las
máquinas. Parte1: Requisitos generales
• EN 61000-6-2:2005+AC:2005 Compatibilidad electromagnética (CEM). Parte 6-2:
Normas genéricas. Inmunidad en entornos industriales
• EN 61000-6-4:2007+A1:2011 Compatibilidad electromagnética (CEM). Parte 6-4:
Normas genéricas. Norma de emisión en entornos industriales
1.3.2 Requisito para el personal de servicio
Solamente personal especialmente capacitado operará la máquina.
General
El personal de servicio no debe estar bajo la influencia del alcohol, las drogas o sustancias
similares. El personal de servicio no deberá tener un campo de visión limitado o restringido
de cualquier manera que pueda provocar riesgos. El personal de servicio deberá contar con
una salud adecuada para operar el sistema/componente (en especial, se debe prestar
atención a la asistencia médica, como a los marcapasos, etc…)
Personal cualificado
Las personas que participan en la puesta en marcha, el funcionamiento, el mantenimiento y
la reparación del sistema/componente deberán estar familiarizadas con el
sistema/componente y capacitadas de manera adecuada. Deberán haber leído y entendido
los manuales de funcionamiento. Además, se les deberá instruir y deberán ser capaces de
evitar posibles riesgos residuales para sí mismos y para terceros mientras trabajan en el
sistema/componente o de reducir tales riesgos lo más posible. Para mantener la
cualificación, se deberán repetir las instrucciones de seguridad como mínimo todos los años.
1.3.3 Equipo de protección personal
¡ADVERTENCIA!
Utilice el equipo de protección individual (EPI), como los zapatos de seguridad, la
careta, las gafas, los protectores auditivos y los guantes adecuados para el tipo de
operación que se lleva a cabo, a fin de reducir el riesgo de lesiones personales.
¡ADVERTENCIA!
Utilice protectores auditivos para reducir el nivel de exposición al ruido cuando la
máquina está en funcionamiento.
0463 623 001
- 9 -
© ESAB AB 2019

1 SEGURIDAD
1.4 Seguridad de instalación
¡ADVERTENCIA!
• Instale la protección
Si no respeta estas precauciones, esto podría causarle lesiones o daños.
• No ponga en marcha la máquina ni ENCIENDA la fuente de alimentación
antes de que esté firmemente anclada.
Puede que la máquina se vuelque y cause lesiones o daños.
• No instale ni haga funcionar una máquina que esté dañada o que carezca
de algunas piezas.
El incumplimiento de esta precaución puede causar lesiones o daños.
• No ponga en marcha la máquina ni ENCIENDA la fuente de alimentación
antes de que el sistema de escape esté conectado.
Los gases de escape presentes en los talleres son un peligro para la salud.
¡NOTA!
Importante
Instale la máquina en un lugar en el que la instalación en la que se incorpore
cumpla con la normativa de la Directiva de máquinas 2006/42/CE.
Si no respeta estas precauciones, esto podría causarle lesiones o daños.
Lea
En el momento de la instalación, es necesario respetar los requisitos de las
condiciones ambientales. Consulte el capítulo 4.2Montaje.
1.4.1 Instalación de la protección
Para garantizar la seguridad, instale la protección. Evita accidentes imprevistos para
personal y daños al equipo. La siguiente cita es para su información y orientación.
Responsabilidad de la protección (EN ISO 10218-2:2011)
El usuario de una máquina o de un sistema completo deberá asegurarse de que se le brinde
la protección y de utilizarla en conformidad con lo dispuesto en los artículos 5, 6 y 7 de la
norma EN ISO 10218-2:2011 Robots y dispositivos robóticos. Requisitos de seguridad para
robots industriales. Parte2: Sistemas e integración de robots. Los medios y el grado de
protección, incluidas las redundancias, se deben corresponder directamente con el tipo y el
nivel de peligro que presente el sistema de máquinas en coherencia con la aplicación. La
protección puede incluir, pero no limitarse a los dispositivos de protección, las barreras, las
barreras de enclavamiento, la protección perimetral, las barreras de concientización y las
señales de concientización.
1.5 Seguridad del cableado
¡ADVERTENCIA!
Antes de manipular el cableado, APAGUE la fuente de alimentación principal y
coloque un cartel de advertencia. (p.ej. NO ENCIENDA LA FUENTE DE
ALIMENTACIÓN). Si no respeta esta advertencia, esto podría causar un incendio o
una descarga eléctrica.
0463 623 001
- 10 -
© ESAB AB 2019

1 SEGURIDAD
¡ADVERTENCIA!
El personal autorizado o certificado deberá realizar las operaciones de cableado. Si
no respeta esta precaución, esto podría causar un incendio o una descarga eléctrica.
Importante
Mantenga la conexión equipotencial y la toma de tierra de protección separadas. La
conexión equipotencial y la toma de tierra de protección son dos circuitos separados.
1.5.1 Toma de tierra de protección
¡ADVERTENCIA!
La toma de tierra de protección se deberá realizar en conformidad con la norma
EN60204-1. Su incumplimiento puede ocasionar accidentes graves.
1.5.2 Conexión equipotencial
El cable se debe seleccionar de acuerdo con la norma EN60204-1. Para establecer la unión
equipotencial, conecte el cable directamente al bastidor de la máquina.
¡NOTA!
Nunca comparta esta línea con otras líneas de tierra o electrodos de tierra para
otros dispositivos de energía eléctrica, de potencia de motor, de soldadura, etc…
1.6 Liberación de persona atrapada en o por la máquina
Lea
Para obtener instrucciones sobre la “Liberación de persona atrapada en o por la máquina”:
consulte la Sección5.3Liberación de personas atrapadas en la XCellerator.
1.7 Retiro de servicio, almacenamiento y eliminación
El retiro de servicio deberá cumplir con todas las normas locales y nacionales aplicables en
el momento del desmantelamiento. La unidad se retirará de servicio, se almacenará y se
eliminará en conformidad con las leyes, los reglamentos y las normas nacionales aplicables.
0463 623 001
- 11 -
© ESAB AB 2019
1 SEGURIDAD
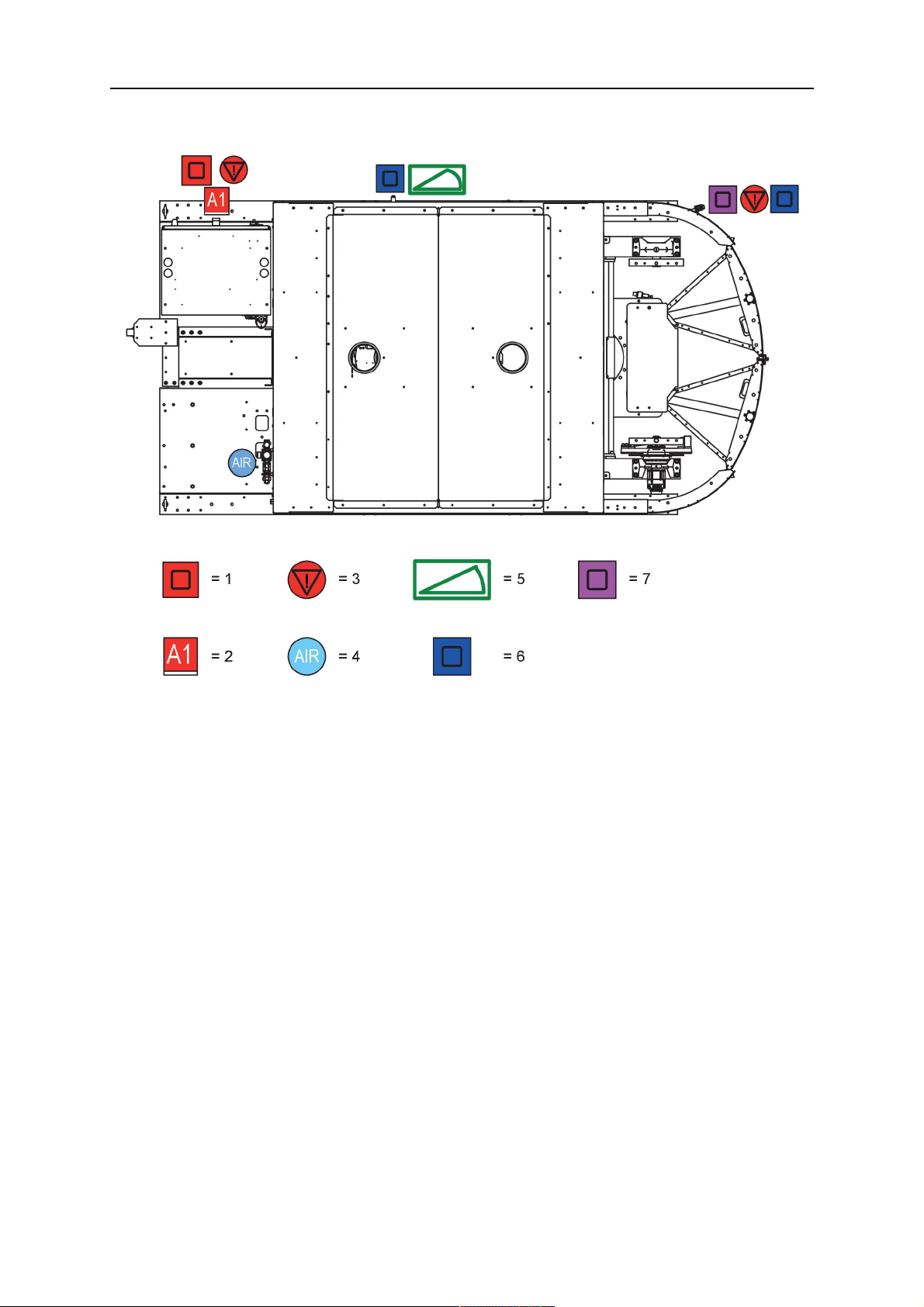
1.8 Diseño de seguridad
1. Restablezca el aire de la parada de
5. Puerta
emergencia “MÁQUINA ENCENDIDA” y
encienda la alimentación eléctrica de
seguridad
2. Interruptor principal del gabinete de
6. Restablecimiento de seguridad
control
3. Parada de emergencia 7. Panel OP
4. Válvula de cierre de aire
1.9 Seguridad
La máquina está diseñada para la soldadura de arco y debe funcionar en conjunto con un
accesorio.
La responsabilidad de YASKAWA Nordic AB no abarca los errores o los riesgos de
seguridad que puedan ocurrir en el equipo conectado o instalado a la máquina, ni los
errores o los riesgos de seguridad que puedan ocurrir en la máquina debido al equipo
conectado o instalado a la máquina.
Solo el personal que cuente con las habilidades y los conocimientos suficientes
podrá utilizar la máquina.
Queda prohibido que cualquier persona permanezca dentro de las protecciones de
seguridad cuando la máquina esté en funcionamiento.
0463 623 001
- 12 -
© ESAB AB 2019
1 SEGURIDAD
1.9.1 Fabricante
Dirección: YASKAWA Nordic AB
P.O Box 504
SE-385 25 Torsås
Verkstadsgatan2
Teléfono: +46480417800
Telefax: +4648641410
Tipo de máquina: Vea la etiqueta de la maquinaria
N.° de máquina: Vea la etiqueta de la maquinaria
Año de fabricación: Vea la etiqueta de la maquinaria
1.9.2 Normativas de salud y seguridad
Todas las máquinas pueden ser peligrosas si se operan de manera incorrecta. Por lo tanto,
es muy importante que todos los usuarios de la máquina lean por completo, entiendan y
respeten las siguientes advertencias y precauciones de seguridad. Lea las instrucciones que
aparecen de manera periódica.
Se respetaron todas las precauciones de seguridad durante la fabricación de este equipo.
Sin embargo, no es posible compensar todos los riesgos; de lo contrario, la capacidad de
trabajo de la máquina sería limitada.
El personal de Yaskawa Nordic AB se encargó de ensamblar y probar todo el equipo. Si el
equipo está correctamente instalado y conectado, funcionará correctamente. En el caso
poco probable de que ocurra una falla, comuníquese con nuestra organización de servicio
antes de efectuar cualquier intento de modificar la maquinaria.
Siga siempre las precauciones básicas de seguridad para reducir el riesgo de incendio,
descarga eléctrica y lesiones personales.
¡ADVERTENCIA!
Respete y siga las normas de seguridad locales.
Las personas no autorizadas no deberán operar la máquina.
No deje de supervisar la máquina mientras esté en funcionamiento. Asegúrese de
que todos los usuarios de la máquina lean y comprendan la información de este
documento.
La utilización segura de la máquina implica los siguientes elementos:
• El operador
• La máquina
• La utilización de la máquina
El operador
El operador deberá estar en buenas condiciones físicas y no encontrarse bajo la influencia
de sustancias que puedan afectar la visión, la destreza o el juicio. No utilice la máquina si
está fatigado, ya que puede perder el control de la máquina. Debe estar alerta en todo
momento.
Trabajar con máquinas puede ser extenuante; si el operador sufre de alguna enfermedad
que podría verse agravada por un el trabajo arduo, consulte con un médico antes de utilizar
el sistema.
0463 623 001
- 13 -
© ESAB AB 2019

1 SEGURIDAD
Vestimenta de trabajo
La ropa debe ser resistente y ceñida al cuerpo, pero debe proporcionar completa libertad de
movimiento. No utilice ropa suelta, mangas sueltas o puños, bufandas, collares, anillos u
otros elementos que puedan quedar atrapados en la máquina. El cabello largo se deberá
atar en una coleta hacia atrás.
Utilizar buen calzado es una medida de seguridad importante. Lleve botas resistentes con
suelas antideslizantes. Se recomienda llevar botas de seguridad con punta de acero.
1.9.3 Seguridad del arco
Ruido
¡ADVERTENCIA!
El ruido que se produce durante el proceso de soldadura puede sobrepasar los
límites.
El ruido que produce el arco puede alcanzar altos niveles. La exposición
prolongada puede dañar la audición. Siempre utilice barreras de sonido.
Yaskawa Nordic AB llevó a cabo la medición de emisión de ruido transmitida por aire de
acuerdo con la Directiva de la maquinaria.
Funcionamiento <85dB(A)
En espera <70dB(A)
Resplandor
¡ADVERTENCIA!
La luz que produce el arco contiene radiación IR (infrarroja) y UV (ultravioleta). La
exposición a la radiación IR y UV daña los ojos y la piel. El efecto de la radiación
aumenta con la disminución de la distancia con respecto al arco.
Utilice pantallas de protección y cortinas para evitar la radiación. Cuando estudie el
arco, utilice siempre una pantalla de soldadura que cuente con resistencia
suficiente y proteja la piel con ropa resistente.
Calor y fuego
¡PRECAUCIÓN!
Trabajar con un arco producirá chispas de partículas calientes. Lleve siempre
guantes de protección cuando manipule la pieza de trabajo.
Revise el extintor de incendios con regularidad.
Utilice el extintor de incendios adecuado contra textiles, líquidos inflamables y electricidad
No almacene materiales inflamables o líquidos cerca de la máquina.
Emisión de gases
No hay emisiones de gases por parte de la máquina. Los gases que emite la máquina se
deben al proceso de soldadura y se producen a causa del gas protector, el alambre y el
material utilizado.
Evacuar los posibles gases es obligación del cliente.
Contaminación del aire
El arco producirá humo y vapores. Evite exponerse a estos vapores que surgen cuando se
calienta el material. Se debe aplicar suficiente succión para evacuar los vapores. Utilice una
máscara protectora cuando trabaje cerca del arco.
0463 623 001
- 14 -
© ESAB AB 2019

1 SEGURIDAD
El material que contenga cualquiera de los siguientes elementos puede producir cantidades
insalubres de vapores peligrosos: plomo, cadmio, zinc, cromo, níquel, mercurio o berilio.
Seguridad de la máquina
La máquina es una unidad individual que probó el personal de Yaskawa Nordic AB en
conformidad con los Requisitos esenciales de seguridad y salud.
Señales de advertencia
La siguiente señal se coloca en la máquina, por lo que deberá ser respetada. Ubicación,
consulte la figura en el capítulo5.1Medidas antes de iniciar.
¡ADVERTENCIA!
El equipo contiene piezas de alta tensión que poseen un riesgo de descarga
eléctrica; dicha descarga puede ocasionar lesiones graves o la muerte.
1.9.4 Mantenimiento
No realice modificaciones de ningún tipo en la maquinaria de Yaskawa Nordic AB. Utilice
piezas de repuesto en su maquinaria provenientes de Yaskawa Nordic AB o de un proveedor
que cuente con la aprobación expresa de Yaskawa Nordic AB. Utilizar piezas de otros
proveedores puede comprometer la seguridad o el funcionamiento de la maquinaria.
Se indica el servicio recomendado en la documentación.
¡ADVERTENCIA!
No limpie, lubrique o ajuste la máquina mientras está en funcionamiento. Primero,
apague la fuente de alimentación principal.
¡NOTA!
Mantenga los ojos abiertos: esa es la mejor protección para evitar accidentes.
1.9.5 Garantía
No deje de lado estas instrucciones de funcionamiento sin haberlas leído cuidadosamente;
inste a los operadores de esta máquina a que también estudien dichas instrucciones. ¡Son
por su propia seguridad!
Esta información contiene instrucciones de funcionamiento y seguridad para esta máquina
de Yaskawa Nordic AB.
Esta máquina está diseñada para una alta capacidad de producción. Por lo tanto, se deben
respetar normas estrictas de seguridad para reducir el riesgo de sufrir accidentes y daños
físicos. La negligencia o el mal uso de la máquina pueden causar accidentes graves o
incluso mortales. Evite problemas innecesarios por medio del uso de las directrices y las
precauciones de seguridad que se proporcionan en este manual.
La máquina solo podrá funcionar de manera correcta si el operador de la máquina sigue las
instrucciones y la información proporcionada en los manuales de funcionamiento.
Yaskawa Nordic AB le otorga una garantía para esta máquina. La garantía es válida en
conformidad con el contrato firmado a partir el día de la instalación. La garantía solo es
válida si se utilizan exclusivamente piezas de repuesto originales de Yaskawa Nordic AB.
A fin de ejecutar correcta y oportunamente el pedido de piezas de repuesto, proporcione la
siguiente información:
• tipo de máquina
• N.° de máquina
0463 623 001
- 15 -
© ESAB AB 2019
1 SEGURIDAD
• N.° de pieza
• cantidad de piezas
• La información sobre la tensión, cuando corresponda
Consulte 8Pedido de piezas de repuesto y equipo opcional.
La modificación en las labores del robot puede causar daños en la máquina; solo el personal
especialmente capacitado las puede realizar.
1.9.6 Instalación
Consulte los manuales de instalación y los manuales de servicio de cada máquina y unidad,
incluidos con esta documentación. Consulte también 4Instalación.
Después de la instalación, se debe realizar un control completo de todas las funciones de
seguridad.
Sistema neumático
Tenga cuidado cuando conecte el sistema neumático con la alimentación principal, ya que
las válvulas, los cilindros y las herramientas pueden moverse de manera inesperada.
1.9.7 Operación manual
Cuando se restablece un robot, es muy importante que se realice de forma precisa. En caso
de duda, pregunte al personal capacitado o al ingeniero de servicio
¡ADVERTENCIA!
Cuando se utilice la máquina en el modo de APRENDIZAJE, se deben tomar
mayores precauciones. Omitir los pasos de programa o la configuración de las
señales de ENTRADA/SALIDA en las labores del robot puede ocasionar la pérdida
de la función de enclavamiento, es decir, tanto los accesorios como el posicionador
pueden perder el equilibrio, soltar los accesorios o perder el ajuste. Esto puede
causar daños graves en la maquinaria, así como lesiones personales.
Si el robot está colocado en otra posición física que no corresponda a la del paso real
durante las labores, cuando se seleccione el modo EJECUTAR/EMPEZAR, el robot
funcionará a alta velocidad y de manera más cercana a la siguiente posición.
0463 623 001
- 16 -
© ESAB AB 2019

2 INTRODUCCIÓN
2 INTRODUCCIÓN
2.1 Uso previsto
XCellerator está diseñado para ser equipado con accesorios y para incorporarse a una
maquinaria controlada por un sistema de controlador de robot. La máquina tiene como
propósito asistir a los robots de soldadura mediante el cambio de piezas.
2.2 Equipo
XCellerator se suministra con los siguientes elementos:
• Base de XCellerator
• Posicionador con dos estaciones
• Kit de ruedas
• Robot industrial MOTOMAN-MA1440 (XC1300) MA2010 (XC2000)
• Kit de montaje para el controlador del robot
• Conjunto de cables entre el posicionador y el controlador del robot
• Instrucciones de uso
• Declaración de conformidad
Piezas principales
• Cubierta
• Mesa giratoria
• Robot MA1440, solo para (XC1300)
• Robot MA2010, solo para (XC2000)
Los posicionadores se pueden equipar a diferentes distancias entre los discos de los
accesorios.
Equipo opcional
• Equipo de soldadura para soldadura MIG/MAG
• Transferencia de archivos multimedia (señal, aire, corriente) para el posicionador
• Mesa fija o posicionador de 3ejes (según el tipo y el diseño seleccionados)
• Puerta interior y gabinete situados en el lado opuesto (izquierdo o derecho)
• MotoWeb para supervisión y administración remotas
• MotoSim con simulación cinemática
• Baliza luminosa
• Kit de pie para la máquina
• Unidad de transmisión de señal y aire para los módulos de HM/TM
• Fuente de alimentación adicional para los módulos de HM/TM
• Soporte de readaptación para los módulos de HM/TM
0463 623 001
- 17 -
© ESAB AB 2019

3 CARACTERÍSTICAS TÉCNICAS
3 CARACTERÍSTICAS TÉCNICAS
3.1 Especificaciones funcionales
Versión Nota
XC1300 L=1300
XC2000 L=2000
3.1.1 Ajuste de parámetros
¡NOTA!
El ajuste de parámetros del posicionador no se incluye en los manuales, ya que
está sujeto a cambios. Consulte el número de pieza del posicionador para ver el
documento correcto de MMS.
3.1.2 Posición
Exactitud de la posición repetitiva: ±0,1mm
3.2 Datos técnicos
Carga máxima y capacidad
Eje giratorio central de
XC1300/XC2000
Torque dinámico 1772Nm 1177Nm
Torque estático 1417Nm 941Nm
Capacidad de carga máxima 500 kg
Desviación máxima 0,15m
Potencia del motor 3,0kW 1,3kW
Reductor de la relación de
marcha
Relación de la marcha total 119:1 165:1
Eficiencia 0,82 0,81
Velocidad nominal 12,6rpm 9,0rpm
Velocidad máxima 16,8rpm 23,5rpm
Temperatura Entre 0 y +40°C*
Humedad Del 20% al 80% de HR a temperatura constante**
119:1 165:1
Eje de inclinación de
XC1300/XC2000
Aceleración de vibración
Alimentación eléctrica Consulte los requisitos del sistema del controlador del robot
Especificación de aire comprimido neumático (opcional)
Presión de trabajo 0,6MPa
Presión mínima 0,5MPa
Calidad En conformidad con ISO8573-1, Clase5,4,3
Capacidad de soldadura (escobilla de carbón estándar única)
0463 623 001
4,9m/s2(0,5G) o menos
en su manual de instalación e instrucciones.
- 18 -
© ESAB AB 2019

3 CARACTERÍSTICAS TÉCNICAS
Servicio continuo al 100% 350A
Servicio continuo al 60 % 460A
*Esta opción solo está disponible para el XC2000.
**Las condiciones ambientales son requisitos generales si ningún equipo específico, como
un kit de IP u otros, permite ciertos ambientes o condiciones extremas.
• Exento de gases corrosivos, líquidos o gases explosivos
• Exento de exposición al agua o al aceite
• Exento de exposición anormal al polvo
• Exento de ruido eléctrico excesivo (plasma)
• Ubicación interior
Girar 2veces, inclinar 2veces con el eje
Eje giratorio Eje de inclinación
central de plataforma giratoria
Torque dinámico 907Nm 1612Nm
Torque estático 726Nm 1330Nm
Capacidad de carga máxima 500kg 500kg
Desviación máxima 0,145m 0,270m
Potencia del motor 1,3kW 2,0kW
Relación de engranajes 90/40
Reductor de la relación de marcha 59:1 171:1
Relación de la marcha total 132,75:1 171:1
Eficiencia 0,7 0,82
Velocidad nominal 11,3rpm 10,6rpm
Velocidad máxima 30rpm 23,4rpm
Para lograr un funcionamiento prolongado y seguro con exactitud elevada del posicionador,
la máquina no debe estar sobrecargada. Siga las restricciones.
3.3 Cálculo de desviación
Cálculo de desviación
(Torque estático máx. del eje en Nm)
--------------------------------------------- =X Desviación máx. del eje en m
(M Carga útil máx. en kg×9,81)
Eje giratorio HM-500D con desviación máxima de x
Torque estático máximo del eje giratorio=941Nm.
M Carga útil máxima de 500kg (incluye accesorios).
X Desviación máxima desde el centro de rotación a 500kg=191mm.
0463 623 001
- 19 -
© ESAB AB 2019

3 CARACTERÍSTICAS TÉCNICAS
Eje giratorio V2TR-500D5 con desviación máxima de x
Torque estático máximo del eje giratorio=726 Nm.
M Carga útil máxima de 500kg (incluye accesorios).
X Desviación máxima desde el centro de rotación a 500kg=145mm.
0463 623 001
- 20 -
© ESAB AB 2019

4 INSTALACIÓN
4 INSTALACIÓN
4.1 Instrucciones para el izado
Lea
Lea y comprenda el contenido del capítulo1. Seguridad antes de manipular
la máquina.
¡ADVERTENCIA!
La operación de la grúa y la puesta en marcha de la carretilla elevadora deben
realizarlas únicamente el personal autorizado. Cuando manipule el posicionador:
• No coloque ningún miembro del cuerpo debajo de una máquina suspendida.
• No mueva la máquina sobre el cuerpo de otra persona.
El manejo descuidado puede ocasionar graves lesiones personales.
4.1.1 Utilización de una carretilla elevadora
¡PRECAUCIÓN!
Transporte la máquina con cuidado, ya que las paredes laterales se dañan con
facilidad.
¡NOTA!
Una grúa no puede levantar el XCellerator.
Para levantar la máquina, utilice una carretilla elevadora con las horquillas en posición
exterior. Introduzca las horquillas en las vigas y levante la máquina, como se muestra en la
ilustración de las instrucciones de levantamiento. Ancle la máquina y transpórtela
lentamente con la debida precaución para evitar vuelcos o deslizamientos.
Con el kit de ruedas incluido, es posible transportar la máquina mediante una transpaleta
manual que tenga capacidad de levantamiento de, al menos, 4toneladas métricas.
0463 623 001
- 21 -
© ESAB AB 2019

4 INSTALACIÓN
A. Puntos de fijación durante el transporte
D. Viga de madera
de M20
B. Puntos de fijación durante el transporte
E. Puerta/cubierta de plexiglás
de M16
C. Placa de transporte
La máquina se proporciona con placas de transporte C y una viga de madera D para la
protección durante el transporte.
Utilice los puntos de fijación A y B para sujetar la máquina durante el transporte y asegúrese
de que las tapas/cubiertas de plexiglás E se mantengan a una cierta distancia de los medios
de transporte circundantes. No utilice los puntos de fijación para realizar el levantamiento.
4.2 Montaje
Lea
Lea y comprenda el contenido del capítulo1. Seguridad antes de manipular
la máquina.
¡NOTA!
Se deben tener en cuenta las fuerzas en la tabla Capacidad de carga máxima en el
capítulo “DATOS TÉCNICOS” cuando se construye y monta el posicionador.
Monte la base de XCellerator en una base o cimiento lo suficientemente firme como para
apoyar la celda y resistir las máximas fuerzas de repulsión durante la aceleración y
desaceleración.
Durante la construcción de un cimiento sólido y más cuando se aplican los tornillos de
anclaje o correspondientes, siga la directiva de la Comisión Europea 89/106/CEE (Productos
de construcción) mediante sus normas armonizadas y, en caso de ser necesario, la
Construcción específica del producto de la ETA (del inglés, European Technical Approval,
Aprobación Técnica Europea) (p.ej., con respecto a la calidad/espesor adecuados del
hormigón y la profundidad de los acoplamientos del perno de anclaje).
0463 623 001
- 22 -
© ESAB AB 2019

4 INSTALACIÓN
4.2.1 Ajuste aproximado
1. Retire las dos placas de transporte A y la viga de madera B utilizadas para la
protección durante el transporte.
2. Asegúrese de que la superficie de la base o del cimiento estén nivelados y parejos. Si
es necesario, amolare la superficie abultada para aplanarla.
¡NOTA!
Es importante colocar arandelas de pie debajo de los tornillos de ajuste.
Asegúrese de que la superficie de la base o del cimiento estén nivelados y parejos. Si es
necesario, amolare la superficie abultada para aplanarla. Ponga las arandelas de pie debajo
de los tornillos de ajuste.
Arandela de pie
A. Tornillo de ajuste D. Base o cimiento
B. Placa base del posicionador E. Perno de anclaje
C. Arandela de pie F. Distancia recomendada aproximada 25
mm
Huellas
0463 623 001
- 23 -
© ESAB AB 2019

4 INSTALACIÓN
XC1300 XC2000
A. Rueda C. Arandela de pie
B. Rueda giratoria
Huella
Coloque la máquina en su posición final. Utilice las arandelas de pie en el punto C de la
ilustración anterior.
¡NOTA!
Mantenga una distancia de 800mm entre las celdas de XC2000.
0463 623 001
- 24 -
© ESAB AB 2019

4 INSTALACIÓN
Figura 1. Paneles laterales de XC2000, versión 0459990670
A. Panel lateral, derecho E. Soporte de radio
B. Panel lateral, izquierdo F. Placa angular
C. Soporte de radio G. Soporte de radio
D. Cubierta lateral superior H. Soporte de radio
Vuelva a ensamblar los paneles laterales A, B de XC2000, versión 0459990670, si se han
retirado durante el transporte para hacer que la celda quepa en un contenedor.
• Ajuste los soportes de radio C, E, G y H con 6tornillos M10.
• Ajuste la cubierta lateral superior D con 5tornillos M6.
• Ajuste la placa angular F con 5tornillos M6.
Nivele la máquina por medio de los 4tornillos de ajuste y las arandelas de pie.
0463 623 001
- 25 -
© ESAB AB 2019

4 INSTALACIÓN
Verifique que la distancia entre los sensores A y la pantalla antirresplandor B sea de 3mm.
Si no es así, afloje los pernos y ajuste en consecuencia.
¡PRECAUCIÓN!
Hay un riesgo de dañar los sensores si la distancia es inferior a 3mm.
4.2.2 Anclaje
Fije la placa base al suelo mediante el ajuste de los pernos de anclaje.
0463 623 001
- 26 -
© ESAB AB 2019

4 INSTALACIÓN
4.2.3 Conexión del sistema de escape
Dimensiones del conducto de escape
Conecte los conductos de escape A a las campanas extractoras.
¡PRECAUCIÓN!
No ponga la máquina en servicio sin conectarla a un sistema de escape.
¡NOTA!
Utilice un conducto flexible o desmontable cuando monte el dispositivo de escape
en las campanas extractoras con el fin de poder extraer las campanas extractoras
para efectuar el mantenimiento.
4.2.4 Conexión
Conecte el cableado eléctrico, consulte el capítulo de seguridad, “1.5Seguridad del
cableado”.
A. Salida opcional de 230VCA E. Alimentación principal de 400VCA, N, P
B. Salida opcional de 400VCA F. Conexión neumática en aire de 1/2",
mínimo de 1000l/min a 6bar
C. Robot G. Salida de conexión neumática
D. Fuente de alimentación
0463 623 001
- 27 -
© ESAB AB 2019

4 INSTALACIÓN
Conecte las conexiones neumáticas A hacia la salida del edificio.
4.2.5 Montaje de equipo opcional
¡NOTA!
Todos los tornillos de montaje deben tener una clase de resistencia de al menos
12:9 y una longitud de rosca mínima de 1,5×D, donde D=diámetro de rosca.
Dimensión (12:9fuerza) Torque de apriete (Nm)
M10 79
M12 136
M14 217
M16 333
M18 463
M20 649
4.3 Cableado
Lea
Lea y comprenda el contenido del capítulo1. Seguridad antes de
manipular la máquina.
4.3.1 Conexión al controlador del robot
¡ADVERTENCIA!
• Instale todos los cables eléctricos en el posicionador, el sistema de control,
los equipos de soldadura, etc, de modo que no haya posibilidad de
tropezarse o de pasar encima de los cables.
• No coloque ningún objeto directamente sobre los cables.
• No coloque los cables cerca de cables de alimentación o por debajo de la
fuente de la soldadura.
El posicionador se controla desde el controlador del robot y del panel del operador.
La instalación y la conexión al controlador del robot comprenden tanto el hardware como la
instalación del software. Los técnicos de servicio de ESAB deben llevar a cabo estos pasos
de trabajo. Cuando el posicionador se suministra con un robot, ya se realizó la instalación en
la fábrica de ESAB. Cuando se suministra junto con otros equipos, consulte el diagrama
independiente de la conexión eléctrica, incluido en la documentación específica del pedido:
Gabinete del controlador
0463 623 001
- 28 -
© ESAB AB 2019

4 INSTALACIÓN
+AK1 Gabinete del controlador principal A Alimentación eléctrica
+AK10 Gabinete controlador de seguridad X1 Robot de cable codificador W1
X2 Robot de cable de motor W2
Conexiones del módulo HM-500D
Conector Modelo N.° de
diagrama
Señal de servoalimentación
HM-500D 348522-xx A
externa
Ilustración de posición en las
conexiones de HM-500D
MotoMount
Servomotor externo y freno HM-500D 348524-xx B
“-xx” es una cierta longitud de cable.
Conexiones de V2TR-500D5
0463 623 001
- 29 -
© ESAB AB 2019

4 INSTALACIÓN
Conector N.° de diagrama Ilustración de posición en las
conexiones de V2TR-500D5
Señal de servoalimentación
348522-xx A
externa
Servomotor externo y freno 348524-xx B
“-xx” es una cierta longitud de cable.
0463 623 001
- 30 -
© ESAB AB 2019

4 INSTALACIÓN
4.4 Componentes de seguridad
A. Interruptor del sensor de seguridad sin
contacto macho Eden 0459990679
C. Sensor de seguridad inductivo
IFMGG712S
B. Interruptor del sensor de seguridad sin
contacto hembra Eden 0459990680
Para cumplir con los requisitos de seguridad, solo debe ser posible abrir la puerta si uno de
los dos sensores de seguridad (C) está ENCENDIDO cuando el otro sensor está APAGADO.
4.5 Antes de la primera puesta en marcha
Lea
Lea y comprenda el contenido del capítulo1. Seguridad antes de
manipular la máquina.
¡ADVERTENCIA!
Compruebe todas las funciones de seguridad, como la parada de emergencia, los
interruptores de seguridad y los haces de luz, antes de la primera puesta en
marcha. De no ser así, podría provocar graves lesiones personales.
¡ADVERTENCIA!
Nunca permanezca dentro de la protección de seguridad durante el funcionamiento.
0463 623 001
- 31 -
© ESAB AB 2019

4 INSTALACIÓN
¡PRECAUCIÓN!
Durante la operación, compruebe que no ocurra nada anormal, como vibraciones,
ruidos inusuales, etc. Si se presenta cualquiera de estas anomalías, detenga la
máquina inmediatamente con el botón de detención de emergencia y comuníquese
con ESAB.
4.5.1 Ajuste de parámetros
El personal autorizado se encarga de realizar el ajuste de parámetros del posicionador en la
fábrica o durante la instalación.
4.5.2 Prueba inicial
¡NOTA!
Para la prueba inicial y el examen del posicionador y sus medidas de protección,
consulte las instrucciones de uso sobre la integración completa.
4.6 Condiciones ambientales
Temperatura Entre 0 y 40°C
Humedad Del 20% al 80% de HR a temperatura
constante
Aceleración de vibración
Otros Exento de gases corrosivos, líquidos o gases
¡NOTA!
Las condiciones ambientales antes mencionadas son requisitos generales si ningún
equipo específico, como un kit de IP u otros, permite ciertos ambientes o
condiciones extremas.
4,9m/s2(0,5G) o menos
explosivos.
Exento de exposición al agua o al aceite.
Exento de exposición anormal al polvo.
Exento de ruido eléctrico excesivo (plasma).
Ubicación interior.
4.7 Alimentación externa
4.7.1 Tensión
Lea
Consulte los requisitos del sistema del controlador del robot en su
manual de instalación e instrucciones.
4.7.2 Neumático (opcional)
Las especificaciones sobre el aire comprimido son las siguientes:
0463 623 001
- 32 -
© ESAB AB 2019

4 INSTALACIÓN
Presión de trabajo: 0,6MPa
Presión mínima: 0,5MPa
Calidad: En conformidad con ISO8573-1, Clase5,4,3
0463 623 001
- 33 -
© ESAB AB 2019

5 FUNCIONAMIENTO
5 FUNCIONAMIENTO
5.1 Medidas antes de empezar
• Compruebe que los interruptores principales estén ajustados en “ON” (encendido)
(controlador DX, fuente de alimentación, enfriador, etc.). El controlador realiza una
comprobación automática.
• Compruebe la posición del soplete de soldadura.
• Si la máquina está en modo de Parada de emergencia, restablezca la función de
acuerdo con el Restablecimiento de parada de emergencia.
• Verifique que la labor seleccionada del robot coincida con la pieza de trabajo que
espera utilizar durante el montaje.
• Verifique la posición del robot (posición de inicio).
• Restablezca la compuerta de servicio. Consulte Restablecer la parada de seguridad.
• Inicie el robot según la subsección “Inicio del robot”.
• Ciclo de carga:
a) Cargando.
b) Presione el botón PreReset (Restablecimiento previo).
c) Salga de la zona de carga.
d) Presione START (Inicio) en el panel de control.
El botón START (Inicio) parpadeará en verde y se cerrará la puerta.
Mientras el botón verde parpadee, se puede presionar el botón OPEN DOOR
(Abrir puerta), lo que abrirá la puerta.
Cuando las puertas estén cerradas, el botón verde estará permanentemente
encendido y la máquina estará lista para utilizarse.
Gabinete del controlador DX y XC1300 o XC2000
A. Gabinetes del controlador DX E. Colgante de programación
B. Interruptor de alimentación principal F. PreReset (Reestablecimiento previo)
C. Panel de control G. Máquina encendida
D. Señal de advertencia
0463 623 001
- 34 -
© ESAB AB 2019

5 FUNCIONAMIENTO
5.2 Inicie el robot en el colgante de programación
1. Interruptor de selección del modo 4. Botón de parada de emergencia
2. Modo PLAY (Ejecutar)/START (Inicio) 5. Servoalimentación lista
3. Modo PLAY (Ejecutar)/HOLD (Espera)
• Ponga la máquina en el modo PLAY (Ejecutar) en el interruptor de selección del modo
(posición1).
• Active la potencia de la servoalimentación a través de SERVOALIMENTACIÓN LISTA
(posición5).
• Presione START (Inicio) en el colgante P (posición2).
• La luz verde está permanentemente encendida y el robot está listo para utilizarse.
La
SERVOALIMENTAC
IÓN ENCENDIDA
parpadea
Está prendida la luz
de
Circuito de seguridad desconectado. No hay potencia de
servoalimentación en el robot. En el modo TEACH (Aprendizaje), se
puede activar el circuito de seguridad mediante el interruptor de
activación.
Circuito de seguridad OK. La potencia de servoalimentación del robot
está ENCENDIDA.
SERVOALIMENTAC
IÓN ENCENDIDA
5.3 Liberación de personas atrapadas en el XCellerator
Siga estas instrucciones de liberación en situaciones de emergencia.
La liberación de personas en un sistema de robot no maniobrable
Si la liberación de una persona es necesaria cuando el sistema de robot está en un estado
no maniobrable, el robot debe moverse por medio de una fuerza externa.
0463 623 001
- 35 -
© ESAB AB 2019

5 FUNCIONAMIENTO
Afloje la conexión entre el robot y el pie del robot
¡ADVERTENCIA!
Para prevenir una caída, se debe dejar un perno colocado. Este perno debe
ubicarse en el lado opuesto del centro de gravedad, en relación con la persona
atrapada.
Afloje los pernos restantes entre el robot y el pie del robot para poder separar todo el robot.
Aflojar el robot de su posición fija afectará a todas las labores programadas del robot, ya que
se cambian las coordenadas de la base.
¡NOTA!
Aflojar el robot de su posición fija afectará a todos los trabajos programados del
robot, ya que se cambiarán las coordenadas de la base.
Abrazaderas, correas etc.
Se pueden utilizar abrazaderas, correas, etc. para forzar un movimiento del robot. Conecte
un extremo del equipo seleccionado al brazo del robot y alrededor del brazo del robot lo más
alejado posible del brazo. Conecte el otro extremo del equipo a una estructura fija para crear
una fuerza lo más perpendicular posible con respecto al brazo del robot.
¡PRECAUCIÓN!
El movimiento forzado del robot puede dañar sus componentes mecánicos
(frenos/engranajes/brazos, etc).
Gato
Se puede usar un gato más pequeño si la postura del robot y el accesorio/posicionador lo
admiten. En tal caso, el gato se coloca entre el brazo del robot y una parte firme.
Liberación de personas en un sistema de robot maniobrable
Esta instrucción debe usarse en situaciones de emergencia durante la programación, en la
que las personas o los equipos hayan sido atrapados por un robot o por otros ejes
controlados por DX.
Si se activó una alarma de sensor de choque:
• Presione RESET (Restablecer) en la pantalla.
(Si se activó la alarma Tracking Error [Seguimiento de error] de servoalimentación,
restablecer primero).
Si la alarma del sensor de choque se activa nuevamente antes de que sea posible
realizar la maniobra:
• Presione ROBOT en el menú de la pantalla.
• Elija SHOCK-SENSOR LEVEL (Nivel del sensor de choque) en el menú de la pantalla.
• Presione SELECT (Seleccionar) para establecer el nivel del sensor de choque en
estado INVALID (No válido).
• Vuelva al trabajo mediante JOB (Trabajo).
1. Elija el sistema de coordenadas JOINT (Conjunto) mediante el botón COORD
(Coordenada) (1).
2. El ícono (2) aparece en las filas de los íconos de la pantalla.
3. Pulse SERVO ON READY (Servoalimentación lista) (3).
4. Disminuya la velocidad hasta el segundo nivel más bajo mediante el botón SLOW
(Lento) (4). (Si se establece la velocidad mínima, presione FAST [Rápido]).
0463 623 001
- 36 -
© ESAB AB 2019

5 FUNCIONAMIENTO
5. Presione hasta que aparezca el ícono de velocidad en la pantalla que tiene el
siguiente aspecto (5).
6. Presione el interruptor de activación (6).
¡ADVERTENCIA!
Observe qué las direcciones (+) y (-) son para los diferentes ejes del robot
antes de maniobrar. Consulte las etiquetas de dirección en sus respectivos
ejes.
7. Retire el robot mediante los respectivos botones de los ejes (+) y (-) (7).
(S-,L-,U-,R-,B-,T-).
0463 623 001
- 37 -
© ESAB AB 2019

5 FUNCIONAMIENTO
5.4 Colocación de los componentes de seguridad
1. Sensor de seguridad sin contacto Adam
8540242
2. Sensor de seguridad sin contacto Eva
8540240
3. Sensor de seguridad inductivo
IFMGG712S
5.5 Función del sistema de seguridad
Cuando se abren las puertas delanteras, se puede ingresar en la zona de carga. Cuando el
operador se está cargando, el robot trabaja al otro lado de la plataforma o se encuentra en la
posición inicial.
Si la puerta de servicio está abierta, toda la máquina se coloca en parada de seguridad;
consulte la sección “Parada de seguridad”.
5.6 Paradas
Parada de producción
Si el operador:
• presiona el botón HOLD (Retención) en el colgante de programación o
• ingresa en la máquina a través de la compuerta de servicio.
Restablecer la parada de producción
Restablecer después de pararse mediante el botón HOLD (Retención):
• Pulse el botón START (Inicio) en el colgante de programación y la máquina iniciará el
ciclo de nuevo.
Restablezca después de la parada y después de abrir la compuerta de servicio:
0463 623 001
- 38 -
© ESAB AB 2019

5 FUNCIONAMIENTO
• Consulte las instrucciones de la sección “Parada de seguridad”.
5.7 Parada de emergencia
Cuando se presiona la Parada de emergencia, el equipo se detiene y se apaga la potencia
de la servoalimentación.
Restablecer la parada de emergencia
1. Restablezca el botón de parada de emergencia mecánicamente con un giro de la
perilla roja hacia la derecha.
2. Restablecer después de la parada de arranque o emergencia:
○ Presione el botón EQUIPMENT ON (Encendido de equipo).
El botón blanco estará permanentemente encendido.
3. Presione el botón SERVO ON READY (Servoalimentación lista) en el colgante de
programación para encender la potencia de la servoalimentación.
4. Presione el botón START (Inicio) en el colgante de programación.
5.8 Parada de seguridad
La parada de seguridad apaga la servoalimentación; el equipo se detiene. La parada de
seguridad ocurre cuando se abre la compuerta de servicio.
Restablecer la parada de seguridad
Restablecimiento de la compuerta de seguridad:
1. Pase a través de la compuerta.
2. Compruebe que no haya personal dentro del área de trabajo y cierre la compuerta.
3. Presione RESET GATE (Restablecer compuerta).
4. Active la servoalimentación a través de SERVO ON READY (Servoalimentación lista).
5. Presione START (Inicio) en el colgante P.
0463 623 001
- 39 -
© ESAB AB 2019

5 FUNCIONAMIENTO
5.9 Panel de control
Botón Función
Parada de
1.
emergencia
2. Amarillo: botón de
Botón de parada de emergencia.
Interrumpe todos los movimientos del equipo.
Abre las puertas delanteras.
luz presionable
3. Blanco: botón de luz
presionable
4. Verde: botón de luz
Cierra las puertas delanteras en modo Teach
(Aprendizaje).
Inicia la producción.
presionable
5.10 Colgante de programación
El colgante de programación está equipado con teclas y botones que se utilizan para llevar a
cabo las operaciones de enseñanza del robot y editar los trabajos.
0463 623 001
- 40 -
© ESAB AB 2019

5 FUNCIONAMIENTO
1. Modo PLAY (Ejecutar)/START (Inicio) 10. Tecla Intro
2. Modo PLAY (Ejecutar)/HOLD (Espera) 11. Tecla numérica
3. Botón de parada de emergencia 12. Tecla de tipo de movimiento
4. Ranura para tarjeta CF 13. Interruptor de activación “Dead Man's
switch” (Interruptor de persona fallecida)
5. Tecla PAGE (Página) 14. Cursor
6. Tecla de selección 15. Pantalla
7. Tecla de selección 16. Tecla de menú superior
8. Tecla de eje 17. Interruptor de selección del modo
9. Interruptor de activación (opcional)
Interruptor de activación "Dead Man's switch" (“Interruptor de persona fallecida”)
¡NOTA!
El interruptor de activación solo se activa en el modo TEACH (Aprendizaje).
Cuando se DESCONECTA la servoalimentación, el robot y la máquina no funcionarán.
Para poder ENCENDER la servoalimentación cuando el circuito de seguridad se activó (en
programación), el robot se debe establecer en el modo TEACH (Aprendizaje). En este modo,
el control de seguridad se transfiere desde el sistema al operador, quien activa la
servoalimentación mediante el interruptor de activación.
En la parte posterior del colgante de programación, se coloca un interruptor de activación de
tres posiciones.
0463 623 001
- 41 -
© ESAB AB 2019

5 FUNCIONAMIENTO
A DESAC
Liberado Sin función (circuito abierto)
TIVADA
B ENCEN
Posición media Funcionamiento (circuito cerrado)
DIDO
C DESAC
Apretado firmemente Sin función (circuito abierto)
TIVADA
Para pasar de la posición de apretado firmemente a la posición intermedia, el interruptor de
activación deberá liberarse totalmente primero. Cuando el circuito de seguridad funciona
correctamente (todas las compuertas cerradas y restablcidas), el interruptor de activación no
tendrá ningún efecto. Cuando el circuito de seguridad se activa (compuerta abierta), se
puede activar la servoalimentación.
¡ADVERTENCIA!
Al regresar al modo PLAY (Ejecutar) después de que el robot haya sido operado
manualmente, el operador debe estar extremadamente atento para no reiniciar la
máquina en la posición incorrecta.
Durante el reinicio, ejecute el robot a la posición de inicio o en la “segunda posición
de inicio”.
Capacidad de programación
¡NOTA!
Para obtener información acerca de la programación y la capacidad en general,
consulte los manuales del controlador del robot:
Referencia para principiantes
Instalación y cableado
0463 623 001
- 42 -
© ESAB AB 2019

6 MANTENIMIENTO
6 MANTENIMIENTO
6.1 General
El mantenimiento del posicionador debe ser realizado solo por personal autorizado o
técnicos de servicio de YASKAWA, quienes están completamente familiarizados con el
diseño y la construcción de la máquina.
Para todo tipo de servicio/mantenimiento:
1. Apague y bloquee los suministros eléctricos.
2. Apague y bloquee el disyuntor del cableado.
¡ADVERTENCIA!
En función del tipo de instalación, pueden existir conexiones entre varias máquinas
y, en consecuencia, se producen suministros eléctricos de varias fuentes de
alimentación.
Apague todos los circuitos con corriente antes del servicio.
A fin de evitar incidentes causados por el uso de la máquina por descuido, coloque
un cartel que indique que se está realizando el mantenimiento.
Verifique después del mantenimiento que todas las cubiertas estén montadas y que
todos los pernos estén ajustados al torque requerido. Compruebe que no haya
herramientas en la celda.
6.2 Mantenimiento
6.2.1 Cronograma de mantenimiento de base de XCellerator
0463 623 001
- 43 -
© ESAB AB 2019

6 MANTENIMIENTO
Intervalo N.°
Objeto Método/especificaciones Lubricante/medios
de
pos
Cada
1 Limpieza general La máquina no necesita
turno
Diariamente2 Vibraciones y ruido en
la unidad de servo.
Semanal
mente
3 Revise los pernos de
fijación y pernos de
anclaje en el suelo.
- Sistema neumático de
aire (equipo opcional).
No se muestra en la
figura.
4 Puertas con sello de
caucho
500h - Cables y mangueras.
No se muestra en la
figura.
Paño seco y aire
ninguna limpieza especial,
comprimido
solo limpieza normal (polvo,
etc.).
Escuche para asegurarse
de que no ocurre nada
anormal, como vibraciones,
ruidos inusuales.
Ajuste si es necesario. Llave inglesa
Compruebe el suministro y
la calidad del aire.
Compruebe el desgaste y
los daños.
Compruebe el desgaste y
Aire comprimido
los daños. Limpie si es
necesario.
Anualmente5 Rodamiento angular Lubrique con pistola de
grasa en la boquilla de
engrase.
6 Resistencia de
aislamiento en
servomotores
Asegúrese de que sea más
de 10Mohm medido con un
megger de 500V después
de desconectar el motor del
controlador.
Sustitució
n de
- Engranaje de
reducción
Comuníquese con un
representante de ESAB.
reparación
Shell Gadus S2
Megger de 500V
0463 623 001
- 44 -
© ESAB AB 2019

6 MANTENIMIENTO
6.2.2 Posiciones de mantenimiento 0459990668 y 0459990670
Posiciones de mantenimiento de HM-500D
Posiciones de mantenimiento de TM-1000
Intervalo N.°
Objeto Método/especificaciones Lubricante/medios
de
pos
Cada
1 Limpieza general La máquina no necesita
turno
Diariamente2 Vibraciones y ruido en
la unidad de servo.
0463 623 001
ninguna limpieza especial,
solo limpieza normal (polvo,
etc.).
Escuche para asegurarse
de que todo sea normal.
- 45 -
Paño seco y aire
comprimido
© ESAB AB 2019

6 MANTENIMIENTO
Intervalo N.°
Objeto Método/especificaciones Lubricante/medios
de
pos
Semanal
mente
3 Compruebe la
sujeción de los
tornillos.
Sistema neumático de
aire (equipo opcional).
No se muestra en la
figura.
500h 4a Unidad de
transferencia de
corriente
4b Disco de tierra
Cables y mangueras.
No se muestra en la
figura.
Ajuste si es necesario. Llave inglesa
Compruebe el suministro y
la calidad del aire.
Compruebe la unidad de
transferencia de corriente y
el disco de tierra en el
cabezal. Si la superficie está
demasiado desgastada, se
producirá un mal contacto,
lo que provocará una
soldadura deficiente.
Compruebe el desgaste y el
Aire comprimido
daño. Limpie si es
necesario.
Anualmente5 Resistencia de
aislamiento en
servomotores
Asegúrese de que sea más
de 10Mohm medido con un
megger de 500V después
de desconectar el motor del
controlador.
6 Rodamientos Aplique grasa 2veces a
1,3cm³ o más según las
condiciones ambientales.
Sustitució
n de
Engranaje de
reducción
Comuníquese con un
representante de ESAB.
reparación
6.2.3 Posicionador de mantenimiento de V2TR-500D5
Megger de 500V
Microlube GL 261
0463 623 001
- 46 -
© ESAB AB 2019

6 MANTENIMIENTO
Intervalo N.°
Objeto Método/especificaciones Lubricante/medios
de
pos
Cada
1 Limpieza general La máquina no necesita
turno
Diariamente2 Vibraciones y ruido en
la unidad de servo.
Semanal
mente
- Sistema neumático de
aire (equipo opcional).
No se muestra en la
figura.
500h 3a Unidad de
transferencia de
corriente
3b Disco de tierra
ninguna limpieza especial,
solo limpieza normal (polvo,
etc.).
Escuche para asegurarse
de que todo sea normal.
Compruebe el suministro y
la calidad del aire.
Compruebe la unidad de
transferencia de corriente y
el disco de tierra en el
cabezal. Si la superficie está
demasiado desgastada, se
producirá un mal contacto,
lo que provocará una
soldadura deficiente.
Paño seco y aire
comprimido
Consulte “Comprobación de
unidad de transferencia de
corriente y disco de tierra”.
- Cables y mangueras.
No se muestra en la
figura.
Anualmente4 Compruebe la correa
de distribución de
tensión
5 Resistencia de
aislamiento en
servomotores
Compruebe el desgaste y el
daño. Limpie si es
necesario.
Consulte “Comprobación de
la correa de distribución de
tensión”
Asegúrese de que sea más
de 10Mohm medido con un
megger de 500V después
de desconectar el motor del
controlador.
Sustitució
n de
reparación
- Engranaje de
reducción
Comuníquese con un
representante de YASKAWA
Nordic AB
Retire la placa de la cubierta para el mantenimiento
¡NOTA!
Organice los tornillos, las arandelas, las tuercas y otras partes para facilitar el
montaje. Todas las piezas deben sujetarse correctamente antes de empezar.
Aire comprimido
Megger de 500V
0463 623 001
- 47 -
© ESAB AB 2019

6 MANTENIMIENTO
A.Placa de cubierta B.Tornillo, pieza n.°6002028 C.Arandela, pieza
n.°6026006
6.2.3.1 Compruebe la unidad de transferencia de corriente y el disco de tierra
1. Afloje los 6tornillos B con las arandelas C, consulte la figura en el capítulo
“Extracción de la placa de cubierta en la unidad de inclinación”.
2. Retire la placa de la cubierta A.
3. Compruebe la unidad de transferencia de corriente y el disco de tierra.
4. Reemplace si es necesario.
5. Vuelva a montar en el orden inverso.
6.2.3.2 Compruebe la correa de distribución de tensión
1. Afloje los 6tornillos B con las arandelas C, consulte la figura en el capítulo
“Extracción de la placa de cubierta en la unidad de inclinación”.
2. Retire la placa de la cubierta A.
0463 623 001
- 48 -
© ESAB AB 2019

6 MANTENIMIENTO
3. Compruebe que la longitud del tramo L sea de 133,5mm entre la distribución de las
poleas.
4. Aplique una fuerza tensora F de 23,9N o una frecuencia de 298Hz de tensado de la
correa, como se muestra en la imagen.
5. Mida la deflexión de la tensión q.
Si q>2,1mm, aumente la tensión de la correa.
Si q<2,1mm, reduzca la tensión de la correa.
6. Vuelva a montar en el orden inverso.
6.3 Unidades de servo
6.3.1 General
¡NOTA!
No se recomienda el desmontaje de la unidad de servo.
Si el engranaje es desmontado por personal sin el conocimiento adecuado, la
característica de rendimiento de datos técnicos no se puede cumplir.
Si tiene que realizarse algún trabajo en las unidades de servo, debe comunicarse
con un representante de ESAB.
Condición de entrega
Cuando los engranajes de reducción se entregan montados en el posicionador, dichos
engranajes se llenaron adecuadamente con grasa en ESAB.
Consideraciones a la hora de ensamblar las unidades de servo
Los ejes del motor deben estar recubiertos con pasta MoS2 o aerosol (por ejemplo,
Molycote).
Desarmado: rearmado
No se recomienda el desmontaje de la caja de reducción. No debe hacerse ningún intento
de cambiar la malla o la holgura dentro de la unidad. Si la unidad es desensamblada por
personal que no pertenezca a ESAB, no se pueden cumplir las características de
funcionamiento y rendimiento.
6.3.2 Engranaje de reducción
Lubricación
Los engranajes están llenos de grasa cuando los entrega ESAB.
El engranaje está lubricado de por vida.
6.3.3 Servo de CA
Servomotor
El servomotor de CA no tiene piezas de desgaste (por ejemplo, cepillos), por lo que alcanza
con realizar la inspección diaria.
El cronograma de inspección para el motor se muestra en la sección “Mantenimiento”. No
desarme el motor. Si el desmontaje es necesario, comuníquese con ESAB.
Servopack
El servopack no requiere ningún tipo de mantenimiento especial. Quite el polvo y apriete los
tornillos de forma periódica.
0463 623 001
- 49 -
© ESAB AB 2019

7 SOLUCIÓN DE PROBLEMAS
7 SOLUCIÓN DE PROBLEMAS
En la pantalla del colgante P, se muestran los mensajes de alarma y error; estos mensajes
se pueden traducir a Solución: medir. Este gráfico está incluido en un documento de la lista
de alarmas independiente.
Se generan dos tipos de mensajes a partir del sistema: los mensajes de error y las alarmas.
7.1 Mensajes de error
Se muestra un mensaje de error debido a un error causado por un mal funcionamiento o el
método de acceso cuando se utiliza el colgante de programación o un equipo externo
(computadora, PLC, etc.). El mensaje de error le avisa al operador que no continúe con la
siguiente operación o el siguiente paso.
Cuando se produce un error, confirme el contenido del error y, a continuación, libere el error.
Para liberar el error, realice cualquiera de las siguientes operaciones:
• Presione CANCEL (Cancelar) en el colgante de programación.
• Alarma de entrada/señal de restablecimiento de error (entrada del sistema).
¡NOTA!
Un error es diferente de una alarma, ya que no detiene el robot incluso si ocurrió
mientras el robot fue operado (durante la reproducción).
7.2 Esquema de alarma
Cuando se produce una alarma de nivel0 a 3 (alarma principal), la servoalimentación se
APAGA.
Clasificación de código de alarma
Código
de
alarma
0□□□ Nivel0 (Alarma
1□□□
a
3□□□
Nivel de alarma Método de restablecimiento de alarma
No es posible restablecer mediante “RESET”
principal)
(Alarma fuera de
línea: Diagnóstico
inicial/Alarma de
diagnóstico de
hardware)
Nivel 1 a 3 (Alarma
principal)
(Restablecer) en la ventana ALARM (Alarma) o el
sistema de señal de entrada (Alarm reset, Restablecer
alarma). Apague la fuente de alimentación principal y
corrija la causa de la alarma. A continuación, ENCIENDA
de nuevo la fuente de alimentación principal.
No es posible restablecer mediante “RESET”
(Restablecer) en la ventana ALARM (Alarma) o el
sistema de señal de entrada (Alarm reset, Restablecer
alarma). Apague la fuente de alimentación principal y
corrija la causa de la alarma. A continuación, ENCIENDA
de nuevo la fuente de alimentación principal.
0463 623 001
- 50 -
© ESAB AB 2019

7 SOLUCIÓN DE PROBLEMAS
Código
Nivel de alarma Método de restablecimiento de alarma
de
alarma
4□□□
a
8□□□
9□□□ Nivel 9 (Alarma
Nivel 9 (Alarma
menor) (alarma de
E/S)
menor) (alarma de
E/S)
Después de corregir la causa, es posible restablecer
mediante “RESET” (Restablecer) en la ventana ALARM
(Alarma) o el sistema de señal de entrada (Alarm reset,
Restablecer alarma).
Después de corregir el motivo por el cual se enciende la
señal de entrada del sistema para la solicitud de alarma
del usuario o del sistema, es posible restablecer
mediante “RESET” (Restablecer) en la ventana ALARM
(Alarma) o la señal de entrada del sistema (Alarm reset,
Restablecer alarma).
Solución de problemas
¡ADVERTENCIA!
APAGUE la unidad antes de la acción correctiva.
Problema Causa Solución
El motor no
arranca
Conexiones sueltas Apriete la conexión
Cableado incorrecto Cableado correcto
Sobrecarga Reduzca la carga
Funcionamiento
inestable
El motor se
sobrecalienta
Cableado incorrecto Inspeccione y corrija el cableado a través de
terminales del motor L1, L2, L3 y PE
Exceso de temperatura
ambiente
La superficie del motor
Reduzca la temperatura ambiente por debajo
de 40°C
Limpie la superficie del motor
está sucia
Sobrecarga Reduzca la carga
Ruido extraño Motor se montó suelto Apriete los pernos de los cimientos
Motor desalineado Vuelva a alinear
Acoplamiento
Balanceo de acoplamiento
desbalanceado
Rodamientos ruidosos Compruebe la alineación, el ruido de los
rodamientos, la lubricación y comuníquese
con Yaskawa
Vibración del equipo en
Comuníquese con Yaskawa
funcionamiento
7.3 Información de contacto de servicio
Cada celda del robot XCellerator incluye un contrato de servicio y asistencia de 1 año
que cubre el robot y la celda del robot, incluidos los equipos de posicionamiento y
manipulación.
Para servicio y soporte, comuníquese con su oficina de Yaskawa más cercana
Para obtener información sobre la oficina de Yaskawa más cercana, consulte
“7.3.1Información de contacto”.
0463 623 001
- 51 -
© ESAB AB 2019

7 SOLUCIÓN DE PROBLEMAS
ESAB proporciona asistencia y servicio solo en el equipo de soldadura y en el
proceso de soldadura.
Para servicio y soporte, comuníquese con su oficina de ESAB más cercana
Para obtener información sobre la oficina de ESAB más cercana, visite esab.com.
7.3.1 Información de contacto
Tema relacionado: El robot y la celda de robot, incluidos equipos de posicionamiento
y manejo.
YASKAWA Nordic AB
PO Box 504, SE-385 25 Torsås
SUECIA
Teléfono +46(0)480417800
www.motoman.se
YASKAWA Nordic AB
AT YASKAWA Europe GmbH
Vienna +43-1-707 9324 15
CZ YASKAWA Czech s.r.o.
Rudná u Prahy +420-257 941 718
DE YASKAWA Europe GmbH
Allershausen +49-8166-90-0
ES YASKAWA Iberica S.L.
Gavà +34-93-6303478
FI YASKAWA Finland Oy
Turku +358-403000600
FR YASKAWA France S.A.
Nantes +33-2-40131919
IL YASKAWA Europe Technology Ltd
Rosh Ha’ayin +972 732 40 08 00
NL YASKAWA Benelux B.V
Son +31 40-2895500
PL YASKAWA Polska Sp. z o.o
Wrocław +48 71 792 86 70
RU YASKAWA Nordic AB
Moscow +7 495 6442409
SE YASKAWA Nordic AB
Torsås +46-480-417800
SI YASKAWA Slovenia d.o.o
Ribnica +386-1-8372-410
SK YASKAWA Europe GmbH, o.z.
Bratislava +421 2 6828 6535
TU YASKAWA Turkey Elektrik Ticaret
Limited Sirketi
Ümraniye-Istanbul +90 216 5273450
IT YASKAWA Italia SRL
Torino +39-011-9005833
0463 623 001
Bratislava +421 2 6828 6535
UK YASKAWA UK Ltd
Banbury +44-1295-272755
ZA YASKAWA Southern Africa PTY Ltd
Johannesburg +27-11-6083182
- 52 -
© ESAB AB 2019

8 PEDIDO DE PIEZAS DE REPUESTO
8 PEDIDO DE PIEZAS DE REPUESTO
¡PRECAUCIÓN!
Las reparaciones y los trabajos eléctricos deben ser realizados por un técnico del
servicio autorizado de ESAB. Utilice solo piezas usadas y repuestos originales de
ESAB.
XC1300 y XC2000 están diseñados y probados de acuerdo con las normas internacionales
y europeas, consulte la sección "Cumplimiento de las normas" del capítulo "SEGURIDAD".
Al finalizar el trabajo de servicio de mantenimiento o reparación, es responsabilidad de las
personas que realizan el trabajo garantizar que el producto sigue cumpliendo con los
requisitos de los estándares anteriores.
Todos los equipos relacionados con la soldadura, como fuente de alimentación,
alimentadores y sopletes, se pueden solicitar a través de su distribuidor ESAB más cercano,
consulte en esab.com. Al realizar el pedido, detalle el tipo de producto, número de serie,
designación y número de repuesto de acuerdo con la lista de repuestos. Esto facilita el envío
y garantiza la correcta entrega.
¡NOTA!
Para equipos relacionados con robótica, como robots, celdas de robot y equipos de
posicionamiento y manejo, comuníquese con la oficina de Yaskawa más cercana.
0463 623 001
- 53 -
© ESAB AB 2019

DIMENSIÓN
DIMENSIÓN
Principales diagramas, dimensiones en mm
Ancho, dimensiones en mm
Version Ordering no. S
[mm]S1[mm]H1[mm]W1[mm]
XC1300 RH door
0459990666 4419 2326 574 1194 3061 MA1440
Fixed table
XC1300 LH door
0459990667 4419 2326 574 1194 3061 MA1440
Fixed table
XC1300 RH door
0459990668 4375 2236 605 1180 3373 MA1440
Ø9003-axis
XC1300 LH door
0459990669 4375 2236 605 1180 3373 MA1440
Ø9003-axis
XC2000 RH door
0459990670 5184 2698 612 1533 3459 MA2010
Ø10003-axis
XC2000 LH door
0459990671 5184 2698 612 1533 3459 MA2010
Ø10003-axis
RH=Derecha
LH=Izquierda
Weight
[kg]
Robot
type
0463 623 001
- 54 -
© ESAB AB 2019

ÁREAS DE TRABAJO
ÁREAS DE TRABAJO
Plataforma fija de zona de trabajo XC1300
Zona de trabajo XC1300/XC2000 de 3ejes
Model L [mm] R [mm] ØD [mm] W2 [mm] S2 [mm]
XC1300 1300 455 910 1200 1057
XC2000 2050 500 1000 1900 1222
0463 623 001
- 55 -
© ESAB AB 2019

ACCESORIOS
ACCESORIOS
Accesorios para HM-500D/1000D, dimensiones en mm
Accesorios para TM-1000, dimensiones en mm
Disco de fijación
Este disco de fijación solo es aplicable para el XC2000
0463 623 001
- 56 -
© ESAB AB 2019

ACCESORIOS
ACCESORIOS
Wheel kit
144709-100 Wheel kit (pos. 1)
Complete signal and air kits for tailstock 114954-100
114954-100 Complete signal and air kits for tailstock
137770-201 Complete signal transfer kit containing
A + B air
Air incl. in signal option 3/8” (Ø12)
12-channel bus (215003-101)
El-kit signal (348083-83) (See Electric kit signal
device)
Specify if 1-axis or 2-axis when ordering
137770-202 Complete signal transfer kit containing A + B air
Air incl. in signal option 3/8” (Ø12)
12 active channels (215003-103)
El-kit signal (347894-83) (See Electric kit signal
device)
Specify if 1-axis or 2-axis when ordering
137770-401 Complete signal transfer kit containing
Controlled air (Air 215005 (2xØ8) incl. in 215008)
12-channel bus (215008-101)
El-kit controlled air (347620-81)
El-kit signal (348083-83) (See Electric kit signal
device)
Specify if 1-axis or 2-axis when ordering
137770-404 Complete signal transfer kit containing
Controlled air (Air 215005 (2xØ8) incl. in 215008)
12 active channels (215003-103)
El-kit controlled air (347620-81)
El-kit signal (347894-83) (See Electric kit signal
device)
Specify if 1-axis or 2-axis when ordering
Electric kit signal device
348083-83 Electric kit signal device (12 channel bus)
347894-83 Electric kit signal device (12 channel active)
0463 623 001
- 57 -
© ESAB AB 2019

ACCESORIOS
Opciones para el contrapunto de TM-1000
Ordering no. Yaskawa no. Denomination
0459990676 Air2x3/8" (2x XCellerator1300)
0459990677 Signal kit, 12chI/O+PE, Air2x3/8"
2x3/8” Valve controlled air (pos.1)
2x3/8”Air, 12 channel I/O + PE
(pos.2)
2x3/8”Air , 24 channel direct I/O + PE
(pos.2)
2x3/8”Air, 4 channel I/O + + PE
(Fieldbus) (pos. 2)
2x3/8”Air, 4 channel I/O + + PE
(Profinet) (pos.2)
Soporte de readaptación
143073-100 Retro fit adapter headstock (pos. 1)
143074-100 Retro fit adapter tailstock (pos. 2)
0463 623 001
- 58 -
© ESAB AB 2019

PIEZAS DE DESGASTE
PIEZAS DE DESGASTE
Pos. Qty. Ordering no. Yaskawa no. Part name Note
Additional power supply
1 1 141645-100 Bracket conductor brush
2 1 0459 990 685 140375-100 Conductor brush
0463 623 001
- 59 -
© ESAB AB 2019

ESAB AB, Lindholmsallén 9, Box 8004, 402 77 Gothenburg, Sweden, Phone +46 (0) 31 50 90 00
http://manuals.esab.com
For contact information visit esab.com
 Loading...
Loading...