

Instruction Sheet
POWERFUL SOLUTIONS. GLOBAL FORCE.
L2943 Rev. A 11/09
1.0 GENERAL SAFETY INFORMATION
Read all instructions, warnings and cautions
carefully. Follow all safety precautions to avoid
personal injury or property damage during system
operation. Enerpac cannot be responsible for damage or injury
resulting from unsafe product use, lack of maintenance or
incorrect product and/or system operation. Contact Enerpac
when in doubt as to the safety precautions and operations.
Failure to comply with the following precautionary statements
could cause equipment damage and personal injury.
A CAUTION is used to indicate correct operating or maintenance
procedures and practices to prevent damage to, or destruction
of equipment or other property.
A WARNING indicates a potential danger that requires correct
procedures or practices to avoid personal injury.
A DANGER is only used when your action or lack of action may
cause serious injury or even death.
WARNING: Read and understand the entire contents
of this manual before beginning installation or operation
of Uni-Lift® actuators and related equipment. Follow all
instructions and observe all safety precautions. Failure to
properly install or operate Uni-Lift® actuators could result in
serious personal injury or damage to equipment and/or
property.
Uni-Lift ® Mechanical Actuators
M and B Series Models
2.0 ACTUATOR SAFETY PRECAUTIONS
• Install the actuator and all related equipment in accordance
with the engineering guidelines and recommendations contained
in the Enerpac Uni-Lift® Catalog #E500 (available from your
Enerpac distributor).
• Do not exceed the actuator ratings, including design load,
travel, and input speed.
• Comply with and adhere to all applicable safety codes for
your area, such as: building codes, elevator codes, AISC Steel
Construction specifi cations, and applicable regulations and
standards (including OSHA Title 29, Chapter 1910-219 and ANSI
B15.1). Note: applicable safety codes, regulations and standards
will vary depending on country and local requirements.
• Follow standard machinery installation practices. Properly
install, align and shield all moving parts.
• Inspect, lubricate and maintain the actuator as described in
this instruction sheet. Use the actuator only for its intended
purpose.
IMPORTANT: Use of Uni-Lift® products to support or move
human cargo is not recommended. Contact Enerpac before
attempting to design a Uni-Lift® system for this application.
WARNING: Always lockout power before performing
any inspection, maintenance, lubrication, adjustment
or repair procedures on the actuator or any associated
power transmission equipment. Be absolutely certain that the
electric motor (or other prime mover) cannot be remotely or
automatically started. Make sure the load is properly supported
before the actuator brake or other holding devices are removed.
3.0 ACTUATOR MODELS
Enerpac Uni-Lift® actuators are available in two versions,
machine screw (M-Series) and ball screw (B-Series).
The M-Series actuator uses a precision rolled Acme threaded
screw that is self locking. In most applications, it will hold its
position without a brake. This type of actuator is best suited
for high load at slower speeds, applications with less frequent
cycling and if the load must be held in position when the system
is at rest.
The B-Series actuator uses ball screws to convert rotary motion
to linear movement. It requires about one-third the horsepower
of a comparable machine screw actuator. This type of actuator is
best suited when smooth, fast operation is required, and if high
cycle operation is anticipated. However, due to the effi ciency of
the ball screw, a mechanical brake must be used to stop the load
screw and to hold it in position.
IMPORTANT: Brakes are recommended for use on ANY UniLift® actuator (including M-Series models) if vibration is present.
Note: The information contained in this manual is intended for
general reference only. Appearance, features and specifi cations
will vary due to design variables, custom engineering and
optional equipment. Refer to the charts in sections 12.0 through
15.0 for an overview of available Uni-Lift® models, features and
optional accessories.
1
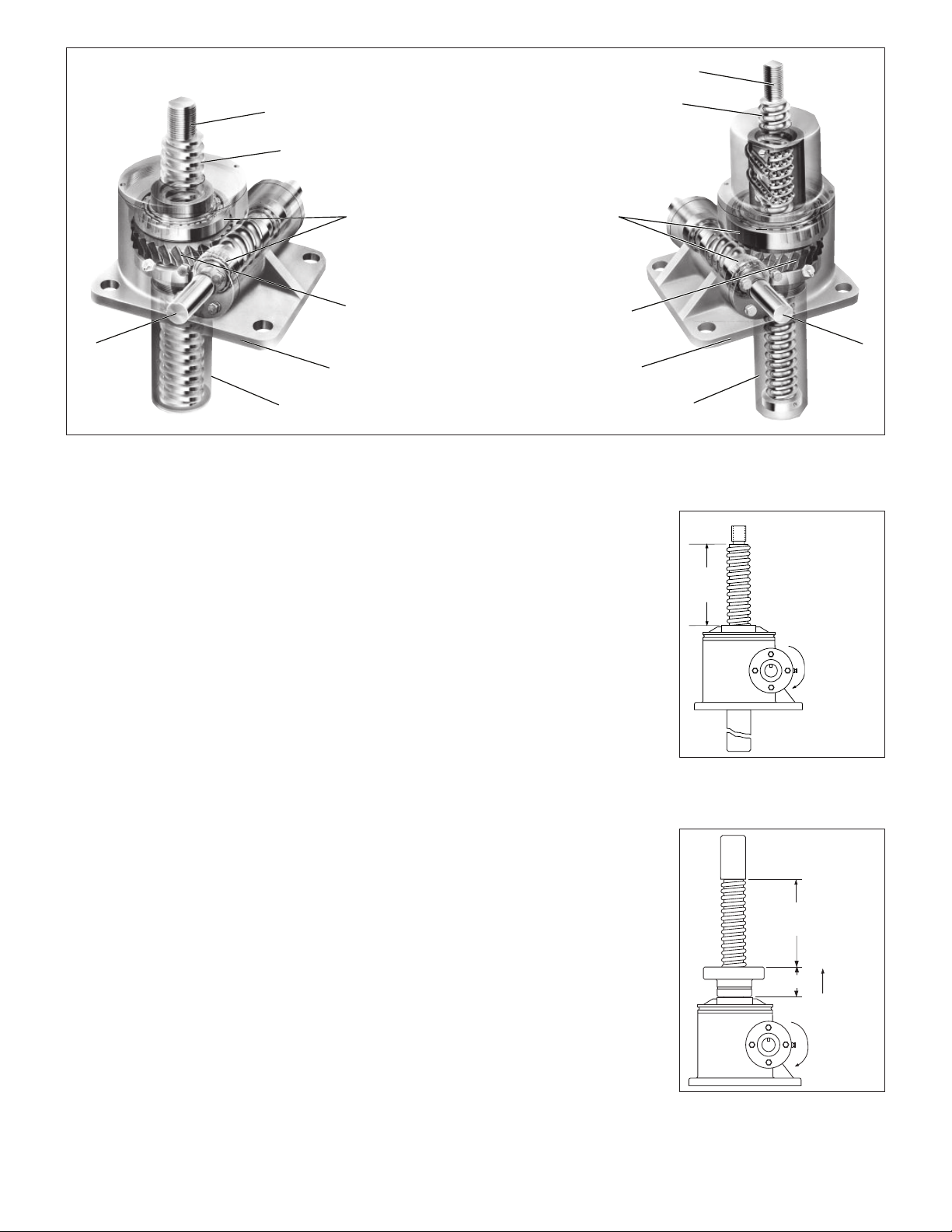
M-Series Models
1
1
2
2
3
Key:
1. Screw End
2. Load Screw
4
3. Tapered Roller Bearings
4. Driven Gear
7
5
5. Housing
6. Protective Tube
7. Input Shaft and Worm Gear
6
Figure 1, Major Features and Components
4.0 ACTUATOR FEATURES
Both M and B Series Uni-Lift® models incorporate a ground
alloy steel worm gear which drives a high tensile bronze gear
nut, accurately machined to high standards for maximum load
carrying capacity and uniformity of motion transmission. See
fi gure 1.
All shafts are mounted on heavy duty tapered roller bearings to
support the rated thrust load of the actuator while maintaining
correct gear alignment. The actuator housing is made of
aluminum or ductile iron, depending on model specifi ed.
The load screw is made of high quality steel that is ground to size
and precision rolled to form the threads. It is well proportioned
to handle the maximum load rating of the actuator. The load
screw upper end can be provided in threaded, plain, clevis or
“top plate” style, depending on model selected. Load screws
with double-clevis ends are also available as an option on some
models.
If needed, stainless steel or special alloy load screws can be
provided at additional cost. Protective bellows boots are
available as an accessory to protect the exposed portion of the
load screw, and to help keep the threads lubricated and free of
dirt.
On upright and double clevis models only, a protector tube is
furnished in order to keep the load screw threads lubricated and
free of foreign material.
Standard M and B Series actuators may be operated at a wide
range of input speeds. Units are recommended based on duty
cycle requirements and other customer supplied information.
5.0 LOAD SCREW CONFIGURATIONS
Uni-Lift® actuators are available in a choice of three different
load screw confi gurations:
1) Translating (refer to section 5.1)
2) Rotating (refer to section 5.2)
3) Keyed Translating (refer to section 5.3)
B-Series Models
3
4
5
6
5.1 Translating
Confi guration
On these actuators, the load
screw “translates” through
the unit to push or pull the
load. The load must be fi xed
to the screw and restricted
Travel
from rotation in order to
produce linear motion. See
fi gure 2.
An optional Anti-Backlash
feature is available
on selected M-Series
Translating models. This
feature automatically
compensates for normal
thread wear to reduce load
screw endplay.
5.2 Rotating Confi guration
On these actuators, the load
screw is fi xed to the driven
gear, causing the screw to
rotate. A fl ange nut travels
along the exposed length
of the load screw to push or
pull the load. The load must
be fi xed to the fl ange nut
and restricted from rotation
in order to produce linear
motion. See fi gure 3.
The plain end of the load
screw and the fl ange nut
are pre-assembled on
these units. The plain end
is designed to fi t a standard
pillow block bearing,
to provide support and
alignment for the rotating
load screw.
=
Figure 2
Flange Nut
Figure 3
7
Clockwise
Rotation
Raises Load
Travel
Motion
Clockwise
Rotation
Raises Load
2
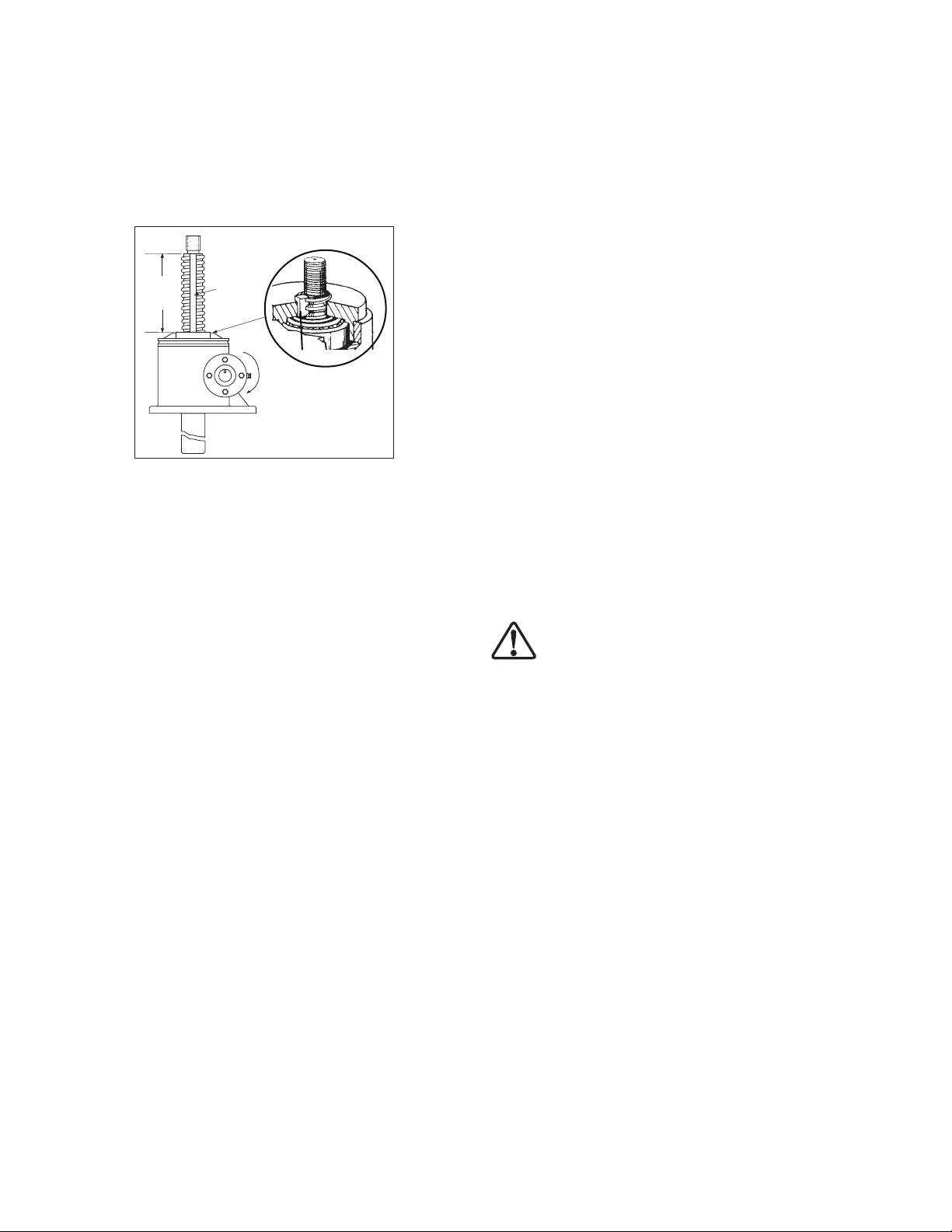
5.3 Keyed Translating Confi guration
In applications where rotation cannot be prevented externally,
a keyed design actuator is required. These models are keyed
internally to prevent rotation of the screw, so that linear motion is
produced. See fi gure 4.
Note: For keyed applications where operating loads are expected
to exceed 25 percent of rated capacity, contact Enerpac for
technical assistance. Also contact Enerpac for recommendations
if unusually long travels or high screw velocities are required.
Travel
Load Screw
Keyway
Figure 4
Key
Clockwise
Rotation
Raises Load
8.0 INSTALLATION REQUIREMENTS
1. Be certain that the rated capacity of the actuator exceeds the
maximum load that may be applied to it during use.
2. Check that the maximum allowable input speed (RPM) of the
actuator will not be exceeded.
Note: For maximum input speeds and other Uni-Lift
specifi cations, refer to the charts in sections 12.0 through 15.0
of this document.
3. Select a motor (if used) of appropriate size for your application.
For motor sizing information, refer to the Enerpac Uni-Lift®
Catalog #E500.
4. Ensure that the actuator foundation is suffi ciently rigid to
maintain correct alignment with connected machinery and
that it has suffi cient strength to support the maximum load.
5. Check that the foundation has a fl at mounting surface to
assure uniform support for the actuator. Mounting bases
should be fl at and suffi ciently strong to support the load.
6. Be sure the opening in the foundation for the protective tube
or the load screw is as small as possible, so that the unit is
supported over the greatest possible area.
7. Ensure that the method of preventing load screw or fl ange
nut (as applicable) rotation is suffi ciently strong, so that
translation will occur. Refer to the Load Screw Torque section
of the Enerpac Uni-Lift® Catalog #E500.
®
6.0 UNPACKING AND RECEIVING THE SHIPMENT
Visually inspect all components for shipping damage. Shipping
damage is not covered by warranty. If shipping damage is found,
notify carrier at once. The carrier is responsible for all repair and
replacement costs resulting from damage in shipment.
Upon delivery, take an inventory of the entire shipment to
determine if shortages exist. All shortages must be immediately
reported to Enerpac and also to the carrier.
7.0 GENERAL INFORMATION
• The customer's application design engineer is responsible
for ensuring that there are no destructive conditions which
could affect the actuator(s) and/or complementing equipment.
Conditions that may be considered destructive include, but
are not limited to: 1) excessive input speeds, 2) extreme shock
loading, 3) mechanical or thermal overloading, 4) exceeding
recommended duty cycles and 5) side loading of the load
screw.
• Each actuator in the system must be specifi ed in accordance
with the stated requirements and precautions contained in
the Enerpac Uni-Lift® Catalog #E500. All calculations and
specifi cations must be reviewed and approved by the customer's
application design engineer in advance of installation.
Note: Unless specifi ed in the sales order, the services of a fi eld
engineer are not included with the purchase of Enerpac Uni-Lift®
actuators and related equipment.
• Installation, maintenance and safety instructions must be
given to all personnel directly responsible for the installation,
maintenance and operation of the Uni-Lift® equipment.
7.1 Warranty Guidelines
• The Enerpac warranty is valid only if the actuator is operated
within the rated capacity and conditions for which the unit was
specifi cally designed.
• In the event that a malfunction of the actuator occurs within
the warranty period, the unit must be immediately removed
from service and Enerpac must be promptly informed of the
problem.
9.0 INSTALLATION AND ALIGNMENT PROCEDURES
1. Mount the actuator and check that the axis of the load screw
is parallel to the movement of the load and centered with
respect to the load. If required, shim under the actuator base
so that this condition is achieved. After re-checking that
alignment is correct, hand tighten the mounting bolts. Repeat
this step for each actuator to be installed in the system.
CAUTION: Eccentric loading and/or side loading will
result in premature wear and/or damage the actuator
and possibly other components in the system. Such
damage is not covered under the Enerpac warranty.
IMPORTANT: To help ensure proper alignment, use of laser
transits during alignment procedures is strongly recommended.
2. Install and align all power transmission equipment, including
speed reducers, mitre gearboxes, shafts and couplings.
Hand tighten mounting bolts.
3 Re-check alignment of input shaft(s) with the worm shaft(s)
of the actuator(s). This alignment is critical for proper
operation.
4. Check the entire system for any obvious indications of binding
or misalignment. Test the system alignment by rotating the
shafts by hand. Fully extend the load screw(s).
Note: When the actuator(s), shafting and gearboxes are properly
coupled together and aligned in a system, it should be possible
to rotate the shafts by hand and to fully extend the load screw(s)
when the load is not applied.
5. After checking for proper alignment, tighten all mounting bolts
and other fasteners to the proper torques. Be sure to torque
all mounting bolts evenly to avoid damaging the actuator
housing. Refer to table 1 (see next page) for torque values.
IMPORTANT: It is essential that all gearboxes and actuators be
securely bolted down to the foundation, using bolts of proper
diameter to fi t the actuator mounting holes. Bolts must be at
least S.A.E. Grade 5 or equivalent. If possible, it is recommended
that each actuator be doweled in place. Doweling will assure
exact repositioning if the component is ever removed.
3
 Loading...
Loading...