

Endress and Hauser and Co FMR2XKL, FMR2XKT Users Manual
TI01437F/00/EN/01.18
71426193
2018-12-07
Products
Solutions Services
Technical Information
Micropilot FMR20
Modbus RS485
Free space radar
Level measurement for liquids
Application
• Ingress protection: IP66/68 / NEMA 4X/6P
• Measuring range: up to 20 m (66 ft)
• Process temperature: –40 to 80 °C (–40 to 176 °F)
• Process pressure: –1 to 3 bar (–14 to 43 psi)
• Accuracy: up to ± 2 mm (0.08 in)
• International explosion protection certificates
Your benefits
• Level measurement for liquids in storage tanks, open basins, pump shafts and
canal systems
• Radar measuring device with Bluetooth® wireless technology and Modbus
communication
• Simple, safe and secure wireless remote access – ideal for installation in hazardous
areas or places difficult to reach
• Commissioning, operation and maintenance via free iOS / Android app SmartBlue
– saves time and reduces costs
• Full PVDF body - for a long sensor lifetime
• Hermetically sealed wiring and fully potted electronics – eliminates water ingress
and allows operation under harsh environmental conditions
• Most compact radar due to unique radar chip design – fits in limited space
installations
• Best price-performance-ratio radar
Table of contents
Micropilot FMR20 Modbus RS485
Important document information ............... 3
Symbols used ................................ 3
Terms and abbreviations ..................... 4
Registered trademarks ....................... 4
Product life cycle ............................ 5
Engineering ................................. 5
Procurement ................................ 5
Installation ................................. 5
Commissioning ............................... 5
Operation .................................. 5
Maintenance ................................ 5
Retirement .................................. 5
Measuring principle ......................... 6
Input ...................................... 6
Output .................................... 6
Input ..................................... 7
Measured variable ............................. 7
Measuring range .............................. 7
Operating frequency ........................... 7
Transmission power ............................ 7
Output ................................... 7
Digital output ................................ 7
Signal on alarm ............................... 8
Linearization ................................ 8
Protocol-specific data, Modbus ................. 8
Modbus settings .............................. 8
Measured variables via Modbus protocol .............. 8
Environment .............................. 20
Ambient temperature range ..................... 20
Storage temperature .......................... 20
Climate class ............................... 20
Operating altitude as per IEC 61010-1 Ed.3 ........... 20
Degree of protection .......................... 20
Vibration resistance ........................... 20
Electromagnetic compatibility (EMC) ............... 20
Process .................................. 21
Process temperature, process pressure ............... 21
Dielectric constant ............................ 21
Mechanical construction .................... 22
Dimensions ................................ 22
Weight ................................... 26
Materials .................................. 27
Connecting cable ............................. 27
Operability ............................... 27
Operating concept ............................ 27
Operation via Bluetooth® wireless technology .......... 27
Remote operation via Modbus protocol .............. 28
Certificates and approvals ................... 29
CE mark ................................... 29
RoHS ..................................... 29
EAC conformity .............................. 29
RCM-Tick marking ............................ 29
Approvals ................................. 29
Explosion-protected smartphones and tablets .......... 29
Pressure equipment with allowable pressure
≤ 200 bar (2 900 psi) .......................... 29
EN 302729-1/2 radio standard ................... 29
FCC / Industry Canada ......................... 30
Other standards and guidelines ................... 31
Electrical connection ......................... 9
Cable assignment ............................. 9
Supply voltage ............................... 9
Power consumption ............................ 9
Starting time ............................... 11
Power supply failure .......................... 11
Connecting the device ......................... 11
Cable specification ............................ 13
Overvoltage protection ......................... 13
Ordering information ....................... 32
Accessories ............................... 32
Device-specific accessories ...................... 32
Documentation ............................ 51
Brief Operating Instructions (KA) .................. 51
Operating Instructions (BA) ..................... 51
Safety Instructions (XA) ........................ 51
Performance characteristics .................. 13
Reference operating conditions ................... 13
Maximum measured error ....................... 13
Measured value resolution ...................... 13
Response time .............................. 14
Influence of ambient temperature ................. 14
Installation ............................... 14
Installation conditions ......................... 14
2 Endress+Hauser
Micropilot FMR20 Modbus RS485
DANGER
WARNING
CAUTION
NOTICE
1.
3.
Important document information
Symbols used Safety symbols
This symbol alerts you to a dangerous situation. Failure to avoid this situation will result in serious or
fatal injury.
This symbol alerts you to a dangerous situation. Failure to avoid this situation can result in serious or
fatal injury.
This symbol alerts you to a dangerous situation. Failure to avoid this situation can result in minor or
medium injury.
This symbol contains information on procedures and other facts which do not result in personal
injury.
Symbols for certain types of information and graphics
Permitted
Procedures, processes or actions that are permitted
Preferred
Procedures, processes or actions that are preferred
Forbidden
Procedures, processes or actions that are forbidden
Tip
Indicates additional information
Reference to graphic
Notice or individual step to be observed
, 2.,
Series of steps
Result of a step
1, 2, 3, ...
Item numbers
A, B, C, ...
Views
Endress+Hauser 3

Micropilot FMR20 Modbus RS485
Terms and abbreviations
BA
Document type "Operating Instructions"
KA
Document type "Brief Operating Instructions"
TI
Document type "Technical Information"
SD
Document type "Special Documentation"
XA
Document type "Safety Instructions"
PN
Nominal pressure
MWP
MWP (Maximum working pressure/max. process pressure)
The MWP can also be found on the nameplate.
ToF
Time of Flight
εr (Dk value)
Relative dielectric constant
Operating tool
The term "operating tool" is used in place of the following operating software:
SmartBlue (app), for operation using an Android or iOS smartphone or tablet
RTU
Remote Transmit Unit
BD
Blocking Distance; no signals are analyzed within the BD.
PLC
Programmable logic controller (PLC)
CDI
Common Data Interface
Registered trademarks
Modbus®
Registered trademark of SCHNEIDER AUTOMATION, INC.
Apple®
Apple, the Apple logo, iPhone, and iPod touch are trademarks of Apple Inc., registered in the U.S.
and other countries. App Store is a service mark of Apple Inc.
Android®
Android, Google Play and the Google Play logo are trademarks of Google Inc.
Bluetooth®
The Bluetooth® word mark and logos are registered trademarks owned by the Bluetooth SIG, Inc. and
any use of such marks by Endress+Hauser is under license. Other trademarks and trade names are
those of their respective owners.
4 Endress+Hauser

Micropilot FMR20 Modbus RS485
Product life cycle
Engineering
Procurement
Installation
Commissioning
Operation
• Proven radar measuring technology
• Level measurement and open channel flow measurement for Ex and non-Ex areas
• Flooding detection
• Wide range of installation possibilities and accessories
• Highest degree of ingress protection
• 2D/3D drawings
• Spec Sheet Producer
• Applicator Selection tool for selecting the perfect measurement solution
Device not compatible with transmitters and sensors that use ultrasonic measurement
technology (e.g. Prosonic FMU9x, FDU9x)
• Best price-performance-ratio radar
• Global availability
• Order code includes variety of mounting accessories
• Rear and front thread for flexible installation
• Slip-on flange for nozzle installation
• Complete measuring point: including mounting accessory and flooding protection tube
• Quick and easy setup with the SmartBlue app and Modbus
• No additional tools or adapters required
• Local languages (up to 15)
• Continuous self-monitoring
• Diagnostics information according to NAMUR NE107 with remedial measures in the form of plain
text messages
• Signal curve via SmartBlue (app)
• Encrypted single point-to-point data transmission (tested by Fraunhofer Institute) and password-
protected communication via Bluetooth® wireless technology
Maintenance
Retirement
• No maintenance required
• Technical experts on-call around the world
• Environmentally responsible recycling concepts
• RoHS compliance (restriction of certain hazardous substances), lead-free soldering of electronic
components
Endress+Hauser 5
Micropilot FMR20 Modbus RS485
D
Q
R
100%
0%
D
L
F
E
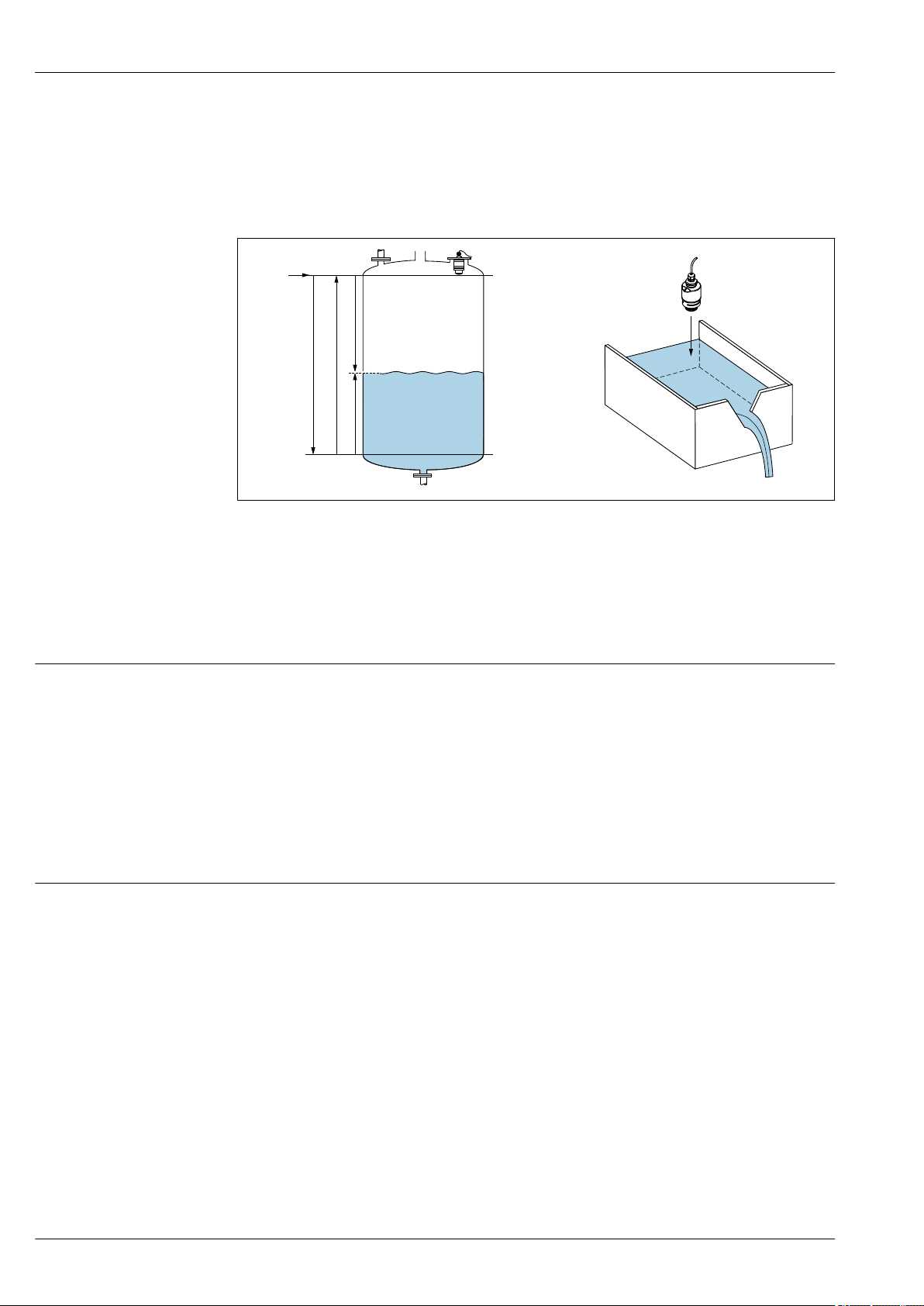
Measuring principle
The Micropilot is a "downward-looking" measuring system, which functions according to the time-offlight (ToF) method. It measures the distance from the reference point R to the product surface.
Radar pulses are emitted by an antenna, reflected off the product surface and received again by the
radar system.
A0028409
1 Setup parameters of the Micropilot Micropilot
E Empty calibration (= zero)
F Full calibration (= span)
D Measured distance
L Level (L = E - D)
Q Flow rate at measuring weirs or channels (calculated from the level using linearization)
R Reference point
Input
The reflected radar pulses are received by the antenna and transmitted to the electronics. A
microprocessor evaluates the signals and identifies the level echo caused by the reflection of the
radar pulses at the product surface. This clear signal detection system benefits from over 30 years'
experience with time-of-flight procedures.
The distance D to the product surface is proportional to the time of flight t of the pulse:
D = c · t/2,
where c is the speed of light.
Based on the known empty distance E, the level L is calculated:
L = E – D
Output
The device is adjusted by entering the empty distance E (= zero point) and the full distance F (=
span).
Digital output (Modbus, SmartBlue): 0 to 10 m (0 to 33 ft) or 0 to 20 m (0 to 66 ft) depending on
antenna version
6 Endress+Hauser
Micropilot FMR20 Modbus RS485
Input
Measured variable
Measuring range Maximum measuring range
The measured variable is the distance between the reference point and the product surface.
The level is calculated based on E, the empty distance entered.
• Device with 40 mm (1.5 in) antenna: 10 m (33 ft)
• Device with 80 mm (3 in) antenna: 20 m (66 ft)
Installation requirements
• Recommended tank height > 1.5 m (5 ft) for media with low εr value
• Open channel minimum width 0.5 m (1.6 ft)
• Calm surfaces
• No agitators
• No buildup
• Relative dielectric constant εr > 4
Usable measuring range
The usable measuring range depends on the antenna size, the medium's reflective properties, the
installation position and any possible interference reflections.
Media groups
• εr = 4 to 10
e.g. concentrated acid, organic solvents, ester, aniline, alcohol, acetone.
• εr > 10
e.g. conductive liquids, aqueous solutions, diluted acids and bases
Reduction of the maximum possible measuring range by:
• Media with bad reflective properties (= low εr value)
• Formation of buildup, particularly of moist products
• Strong condensation
• Foam generation
• Freezing of sensor
Operating frequency
Transmission power
K-band (~ 26 GHz)
Mean power density in the direction of the beam
• At a distance of 1 m (3.3 ft): < 12 nW/cm
• At a distance of 5 m (16 ft): < 0.4 nW/cm
Output
Digital output Modbus®
Dedicated differential Modbus interface via separate wire pair
Bluetooth® wireless technology
The device has a Bluetooth® wireless technology interface and can be operated and configured via
this interface using the SmartBlue app.
• The range under reference conditions is 25 m (82 ft)
• Incorrect operation by unauthorized persons is prevented by means of encrypted communication
and password encryption
• The Bluetooth® wireless technology interface can be deactivated
2
2
Endress+Hauser 7
Micropilot FMR20 Modbus RS485
Signal on alarm
Linearization
Depending on the interface, failure information is displayed as follows:
• Digital communication (Modbus)
– Status signal (as per NAMUR Recommendation NE 107)
– Diagnostic code
• Operating tool via SmartBlue (app)
– Status signal (as per NAMUR Recommendation NE 107)
– Plain text display with remedial action
The linearization function of the device allows the conversion of the measured value into any unit of
length, weight, flow or volume. When operating via Modbus, linearization tables are preprogrammed for the calculation of the volume in vessels (see the following list).
Pre-programmed linearization curves
• Cylindrical tank
• Spherical tank
• Tank with pyramid bottom
• Tank with conical bottom
• Tank with flat bottom
Other linearization tables of up to 32 value pairs can be entered manually.
Protocol-specific data, Modbus
Modbus conformity
Modbus-compliant with restrictions.
The TIA-485 Standard is only met with the following restrictions:
Maximum bus load:
100 Ω
For installations with a bus cable > 100 m, the load should not drop below 200 Ω, or a fieldbus
repeater should be used.
Time for connection setup
< 1 s
Addressing
1 to 200
Modbus settings
Measured variables via Modbus protocol
The following settings can be customized via Bluetooth and Modbus.
Setting Options Default
Data bits 7,8 8
Parity Even, odd, none Even
Stop bits 1,2 1
Baud rate 1200, 2400, 4800, 9600, 19200 9600
Protocol RTU, ASCII RTU
Addressing 1 to 200 1
The 8 most important process parameters are mapped as burst parameters to the first addresses in
the Modbus address range. This means that these parameters can be read out in one measurement
transmission. All parameters are available in the Float32 format.
The register address must be incremented by one (register address +1) when using the
Memograph M RSG45 or Fieldgate FXA30b Modbus master.
Modbus address Parameter name Description
5000 MODB_PV_VALUE Level linearized (PV)
5002 MODB_SV_VALUE Distance (SV)
5004 MODB_TV_VALUE Relative echo amplitude
(TV)
8 Endress+Hauser
Micropilot FMR20 Modbus RS485
1
2
-
+
D0 / A (+)
D1 / B (-)
3
4
Modbus address Parameter name Description
5006 MODB_QV_VALUE Temperature (QV)
5008 MODB_SIGNALQUALITY Signal quality
5010 MODB_ACTUALDIAGNOSTICS Current diagnostics
5012 MODB_LOCATION_LONGITUDE Longitude coordinate
5014 MODB_LOCATION_LATITUDE Latitude coordinate
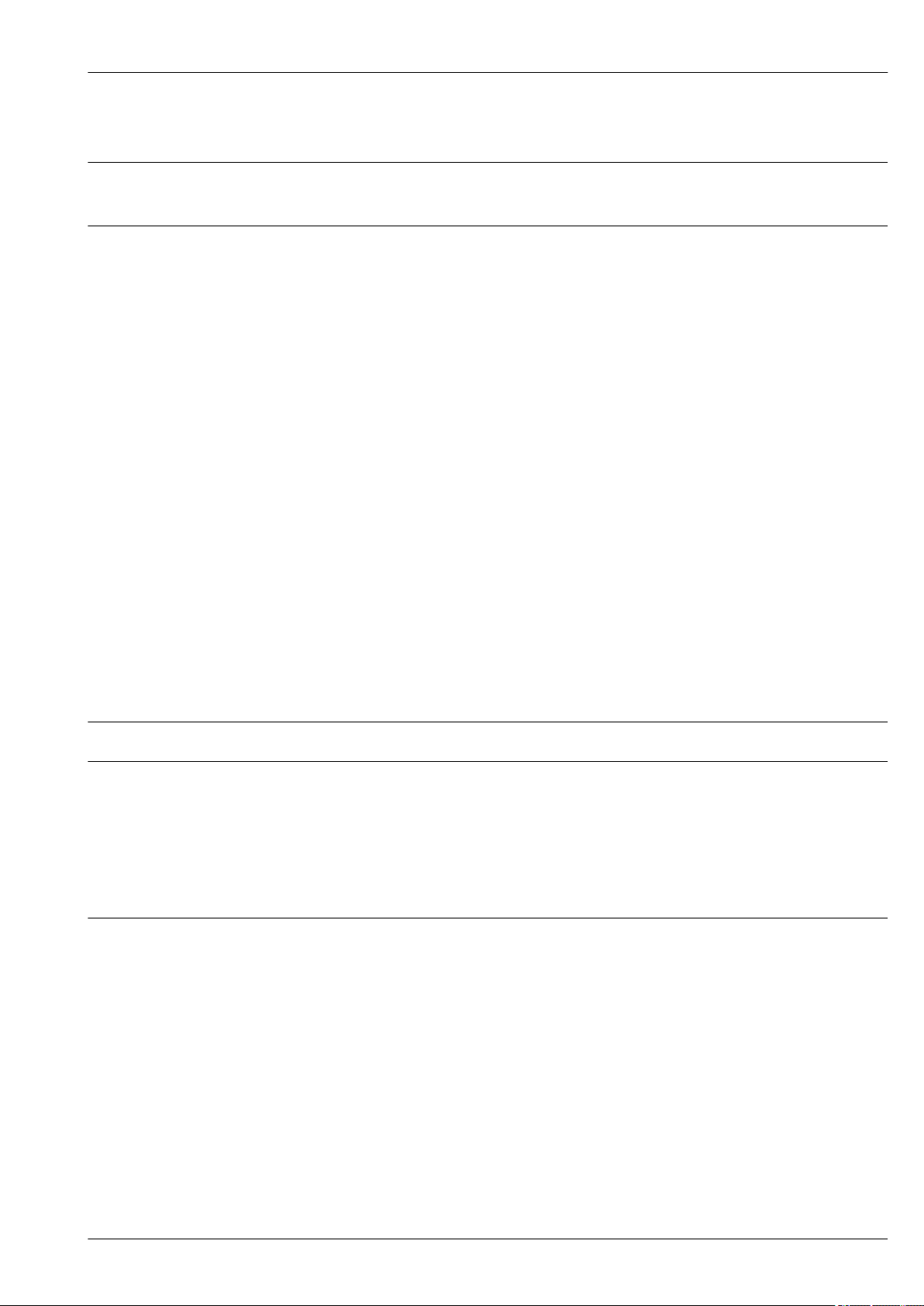
Electrical connection
Cable assignment
number
A0037750
2 FMR20 cable assignment, Modbus
1 Plus, brown wire
2 Minus, blue wire
3 Modbus D0/A (+), white wire
4 Modbus D1/B (-), black wire
Supply voltage
5 to 30 V
DC
An external power supply is necessary.
Battery operation
The sensor's Bluetooth® wireless technology communication can be disabled to increase the
operating life of the battery.
Potential equalization
No special measures for potential equalization are required.
Power consumption
Various power supply units can be ordered as an accessory from Endress+Hauser.
Data with supply voltage 24 V
DC
Maximum input power: 100 mW
Calculation for other supply voltage:
P = 39 mW + (Vcc -24 VDC) × 0.28
Measures to reduce power consumption:
Disabling the Bluetooth® wireless technology interface reduces the power consumption by 1.5 mW.
Endress+Hauser 9
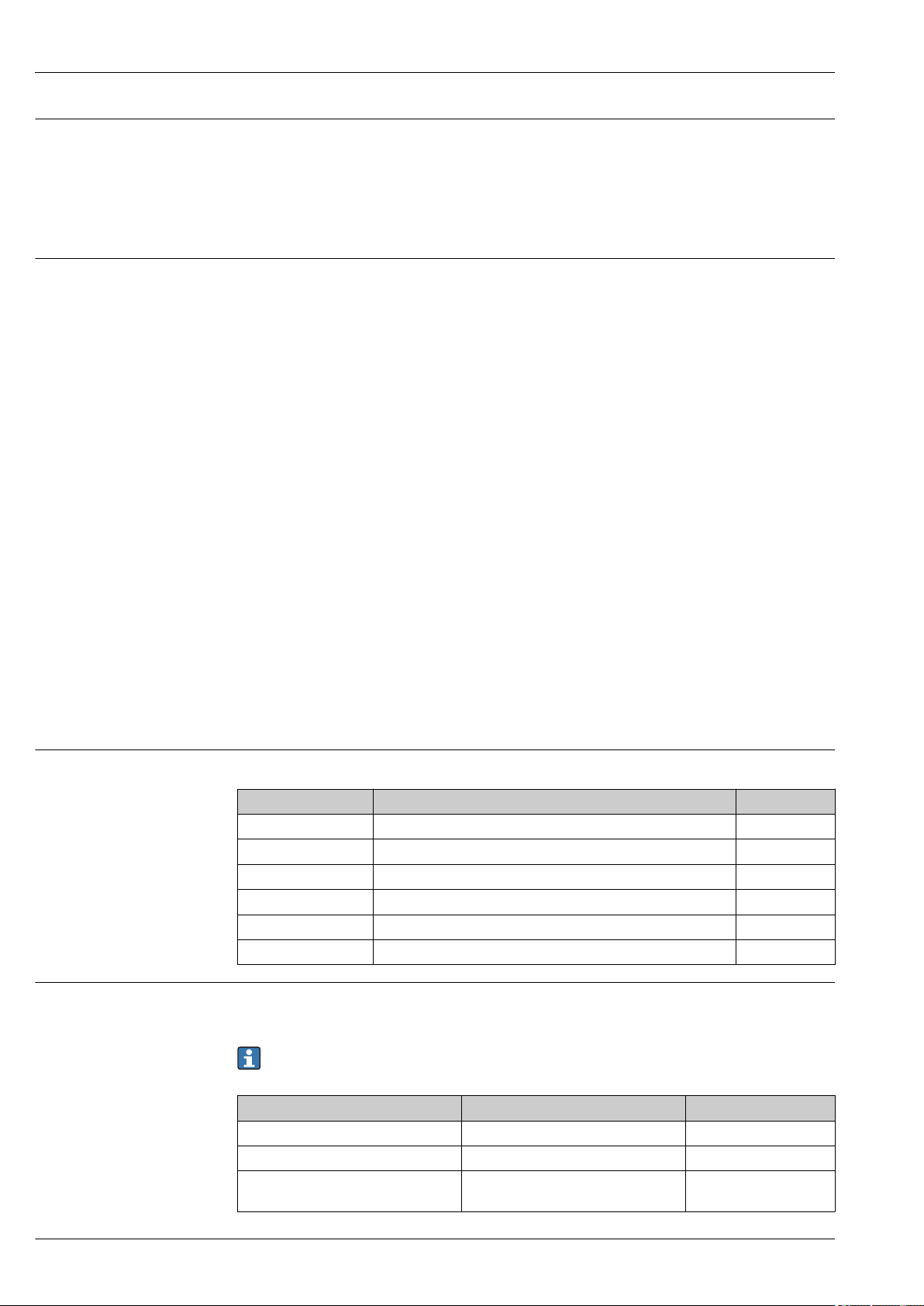
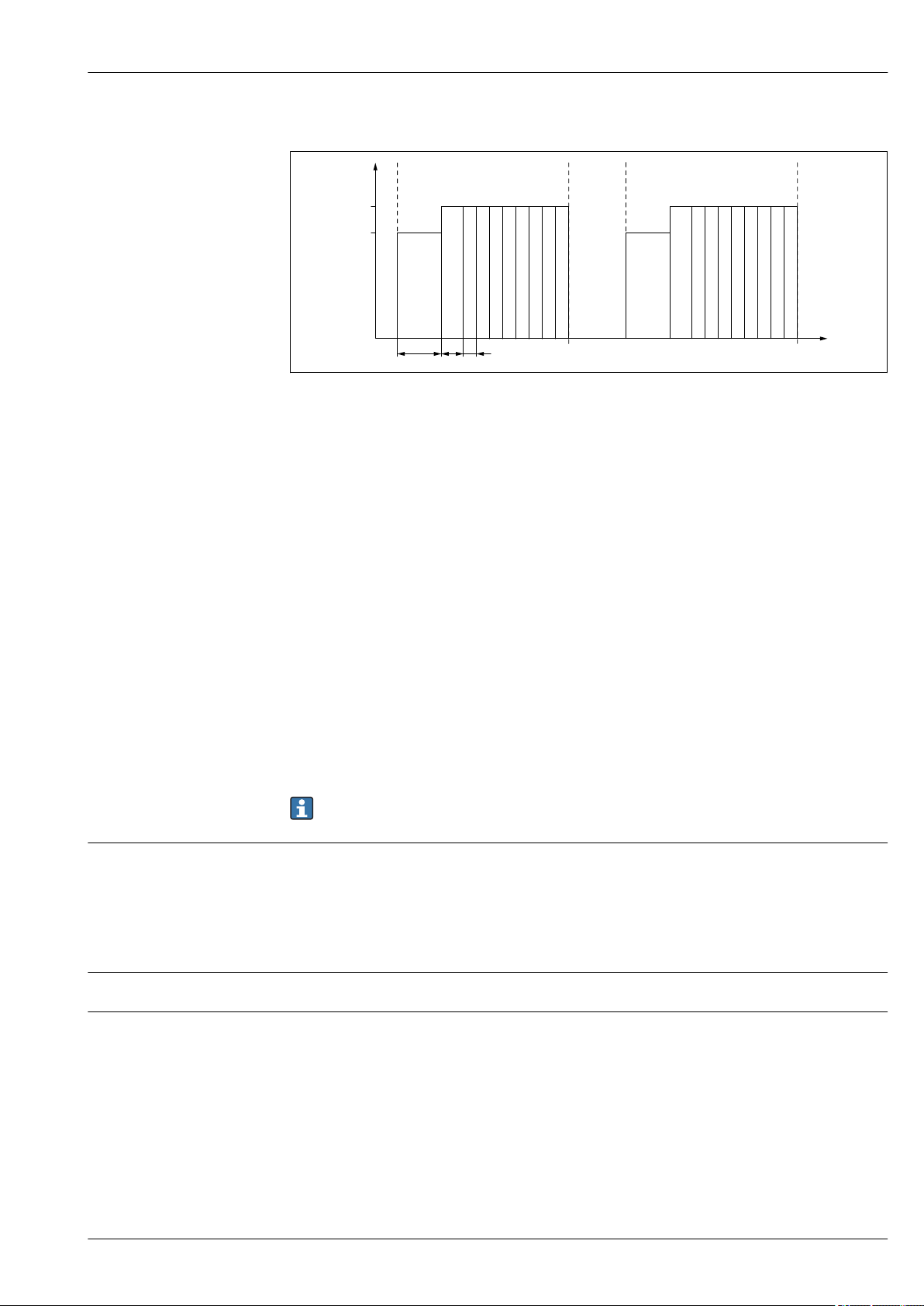
Single shot mode switched on/off via RTU
A
B B
3
C C
39
A
33
30
8
D E
t
P
(mW)
(s)
B B
C C
3
F
39
30
t
P
(mW)
(s)
3 Power consumption of single shot mode switched on/off via RTU
A Start-up
B Measurement
C Power save mode
D Switch on power supply
E Switch off power supply
Micropilot FMR20 Modbus RS485
A0038152
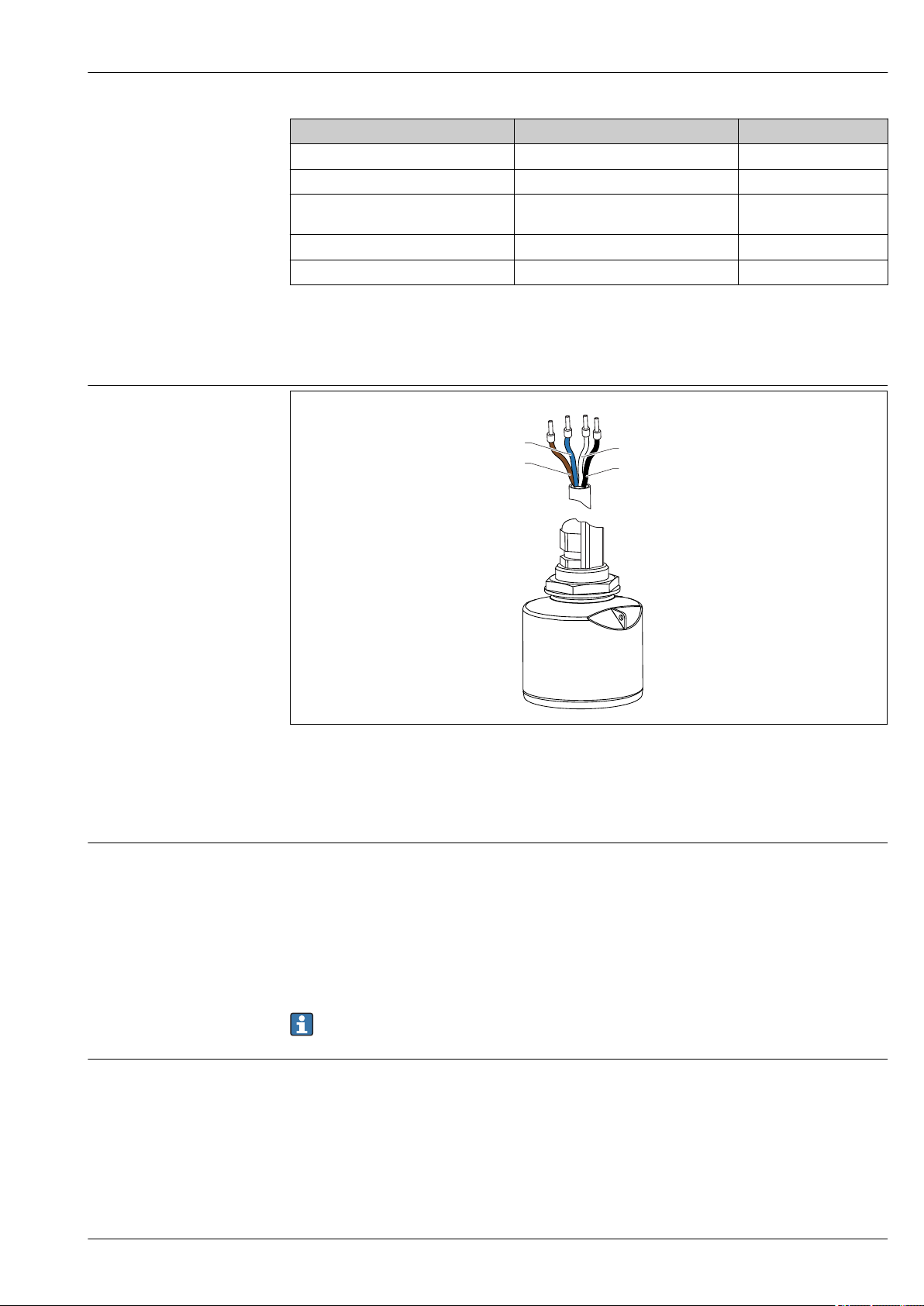
Single shot mode switched on permanently
4 Power consumption of single shot mode switched on permanently
B Measurement
C Power save mode
F Trigger
A0038151
10 Endress+Hauser
Micropilot FMR20 Modbus RS485
A
A
BBB
B
BBBBBBBBBBBBB
B
1
39
33
8
t
P
C
D
(mW)
(s)
3
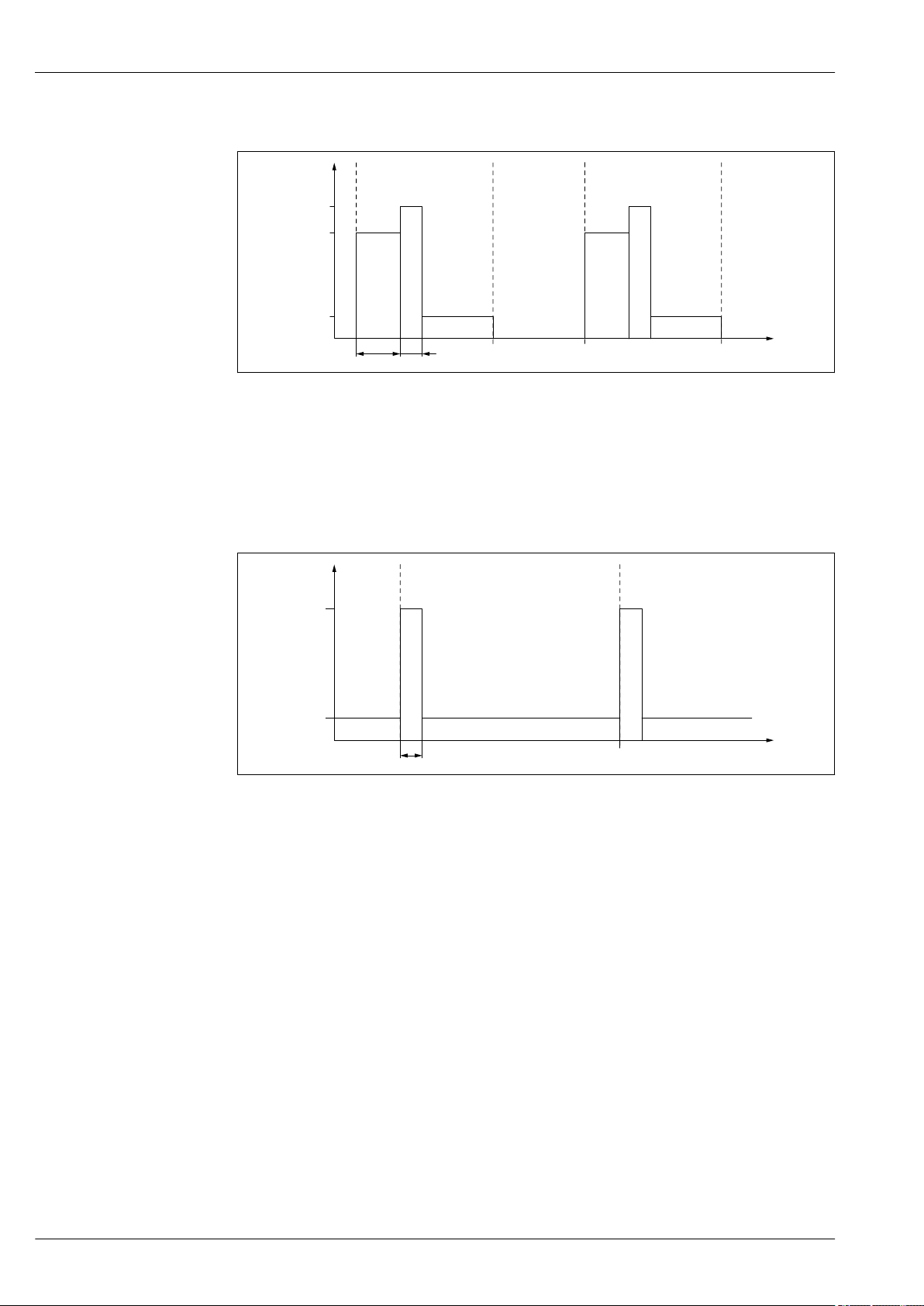
Continuous measuring mode switched on/off via RTU
5 Power consumption of continuous measuring mode switched on/off via RTU
A Start-up
B Measurement
C Switch on power supply
D Switch off power supply
A0038153
Starting time
Calculation example
Assumed configuration
• RTU: E+H FXA30B with battery (7.2 V, 14.5 Ah)
• Modbus: single-shot mode switched on/off via RTU
• Switch on power supply every 15 min and leave switched on for 30 s
Power consumption with Vcc = 7.2 V
• Start-up: 33 mW + (7.2 V - 24 V) × 0.28 = 28.3 mW
• Measurement: 39 mW + (7.2 V - 24 V) × 0.28 = 34.3 mW
• Power save mode: 30 mW + (7.2 V - 24 V) × 0.28 = 25.3 mW
Energy of a measurement:
E= 8 s × 28.3 mW + 3 s × 34.3 mW + (30 s - 8 s - 3 s) × 25.3 mW = 810 mWs
Number of measurements:
7.2 V × 14.5 Ah × 3 600 / 0.810 Ws = ~ 460 000 measurements
Operating life:
460 000 × 15 min = 4 790 days = 13 years
The energy consumption of the RTU is not taken into consideration!
Until the 1st measured value:
• 11 s (typically)
• 15 s (maximum)
Until full accuracy:
• 15 s (typically)
• 20 s (maximum)
Power supply failure
The configuration remains stored in the sensor.
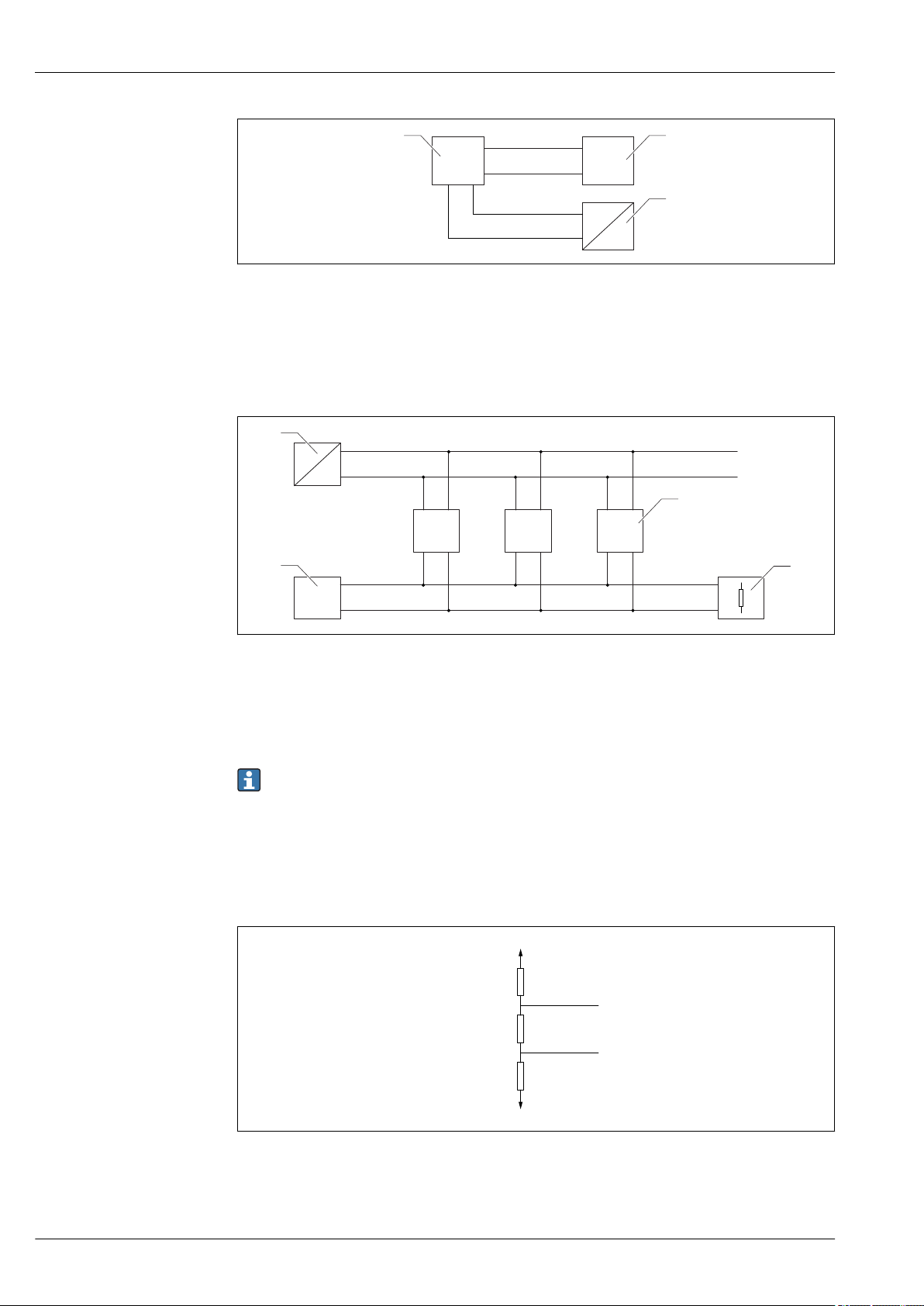
Connecting the device Block circuit diagram for Modbus RS485 connection
The RS485 connection meets the requirements of the RS485-IS specification for use in hazardous
environments.
Endress+Hauser 11
2
3
DO / A(+)
+
D1 / B(-)
-
1
+
+
-
6 Block circuit diagram for Modbus RS485 connection
DO / A(+)
+
D1 / B(-)
-
1
+
-
3
2
4
DO / A(+)
D1 / B(-)
200 Ω
510 Ω
510 Ω
+
DO / A(+)
D1 / B(-)
1 Device with Modbus communication
2 Modbus master/RTU
3 Power supply
Up to 32 users can be connected on the RS485 bus.
Micropilot FMR20 Modbus RS485
A0037751
7 Block circuit diagram for Modbus RS485 connection, multiple users
1 Power supply
2 Device with Modbus communication
3 Bus termination
4 Modbus master/RTU
The bus cable should be a type-A fieldbus cable with a maximum length of 1 200 m (3 937 ft).
If the device is installed in a hazardous environment, the cable length may not exceed
1 000 m (3 281 ft).
A terminating resistor must be connected at both ends of the RS485 bus.
Modbus RS485 bus terminating resistor
The bus terminating resistor should be installed as per the RS485-IS specification.
A0038149
8 Representation of the bus terminating resistor as per the RS485-IS specification
12 Endress+Hauser
A0038150
Micropilot FMR20 Modbus RS485
0
0.5 (1.67)
D[m ](ft)
∆
[mm (in)]
2 (0.08)
10 (0.39)
-20 (-0.79)
20 (0.79)
-2 (-0.08)
-10 (-0.39)
R
R
0.1 (0.33)
R
Cable specification
Overvoltage protection
Reference operating conditions
Maximum measured error
Unshielded cable, wire cross-section 0.22 mm
2
• UV- and weather-resistant
• Flame resistance according to IEC 60332-1-2
As per IEC/EN 60079-11 section 10.9, the cable is designed for a tensile strength of 30 N (6.74 lbf)
(over a period of 1 h).
The device is supplied with 5 m (16 ft) cable length as standard. Cable lengths 10 m (33 ft) and
20 m (66 ft) are optionally available.
User-defined lengths up to total length of 300 m (980 ft) are possible in increments of one meter or
one foot.
The device is equipped with integrated overvoltage protection.
Performance characteristics
• Temperature = +24 °C (+75 °F) ±5 °C (±9 °F)
• Pressure = 960 mbar abs. (14 psia) ±100 mbar (±1.45 psi)
• Humidity = 60 % ±15 %
• Reflector: metal plate with diameter ≥ 1 m (40 in)
• No major interference reflections inside the signal beam
Typical data under reference operating conditions: DIN EN 61298-2, percentage values in relation to
the span.
Digital output; Modbus, SmartBlue (app)
• Sum of non-linearity, non-repeatability and hysteresis: ±2 mm (±0.08 in)
• Offset/zero point: ±4 mm (±0.16 in)
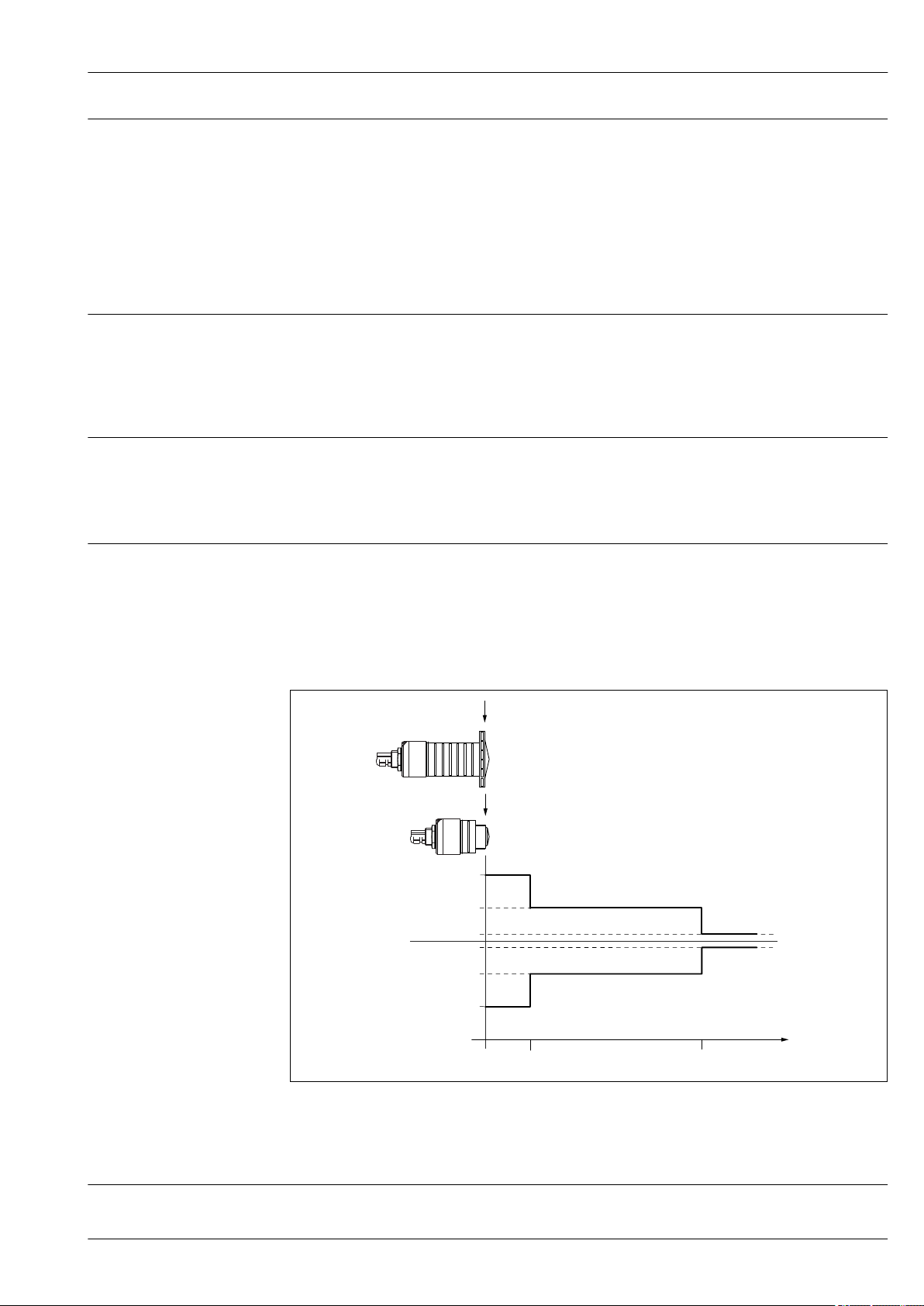
Measured value resolution
Differing values in near-range applications
A0033255
9 Maximum measured error in near-range applications; values for standard version
∆ Maximum measured error
R Reference point of the distance measurement
D Distance from reference point of antenna
Dead band as per EN61298-2:
Digital: 1 mm (0.04 in)
Endress+Hauser 13
Micropilot FMR20 Modbus RS485
B C D
A
E
F
Response time
The response time can be configured. The following step response times apply (in accordance with
DIN EN 61298-2) when damping is switched off:
Tank height
<20 m (66 ft)
Sampling rate
-1
1 s
Response time
<3 s
In accordance with DIN EN 61298-2, the step response time is the time following an abrupt
change in the input signal up until the changed output signal has adopted 90% of the steadystate value for the first time.
Influence of ambient temperature
The measurements are carried out in accordance with EN 61298-3.
Digital (Modbus, Bluetooth® wireless technology):
Standard version: average TC = ±3 mm (±0.12 in)/10 K
Installation
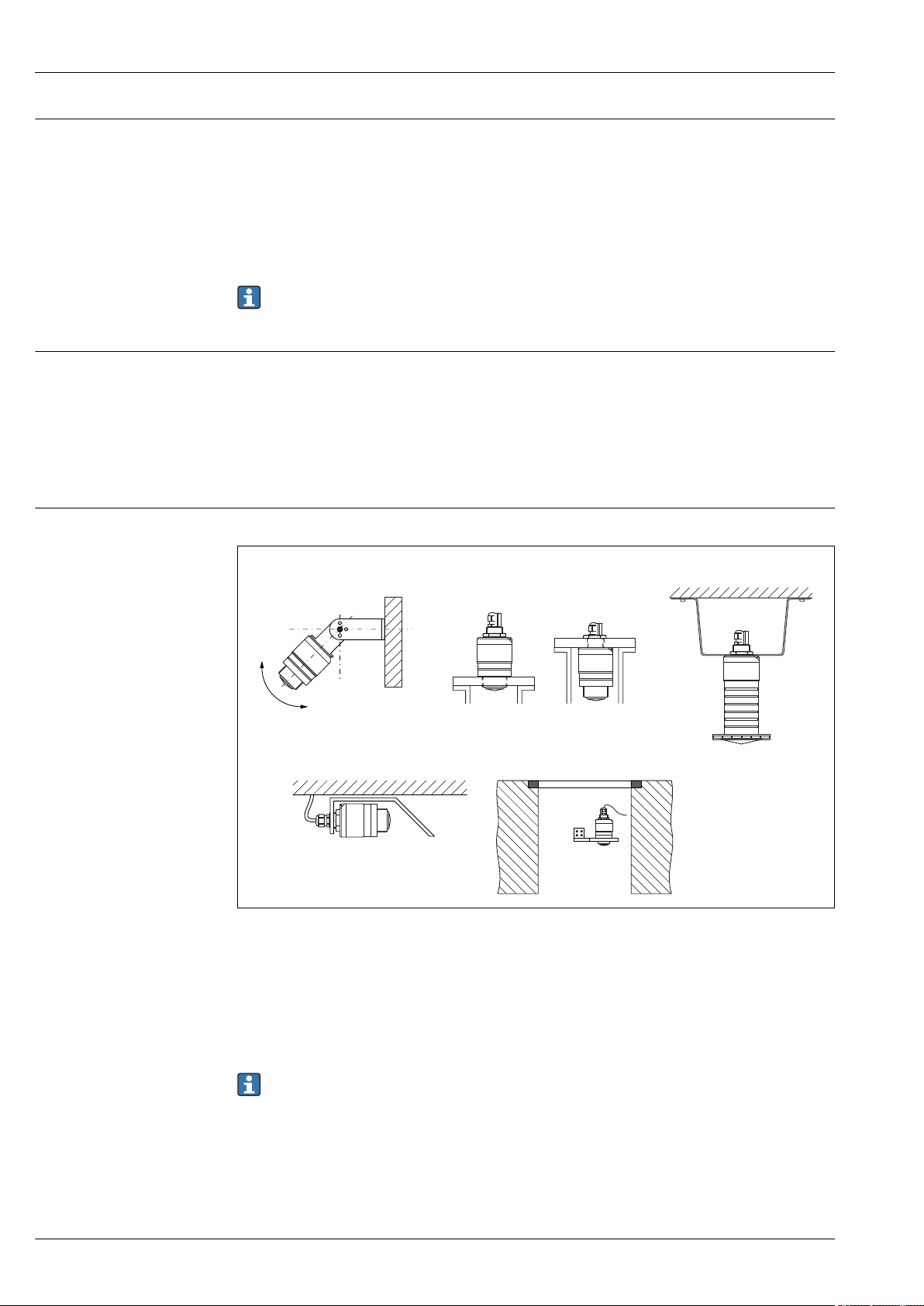
Installation conditions Installation types
A0030605
10 Wall, ceiling or nozzle installation
A Wall or ceiling mount, adjustable
B Mounted at front thread
C Mounted at rear thread
D Ceiling installation with counter nut (included in delivery)
E Horizontal installation with reflector plate
F Shaft wall mounting
Caution!
• The sensor cables are not designed as supporting cables. Do not use them for suspension
purposes.
• Always operate the device in a vertical position in free-space applications.
14 Endress+Hauser
Micropilot FMR20 Modbus RS485
A
BD
D
BA
L
D
L
D
L
D
L
D
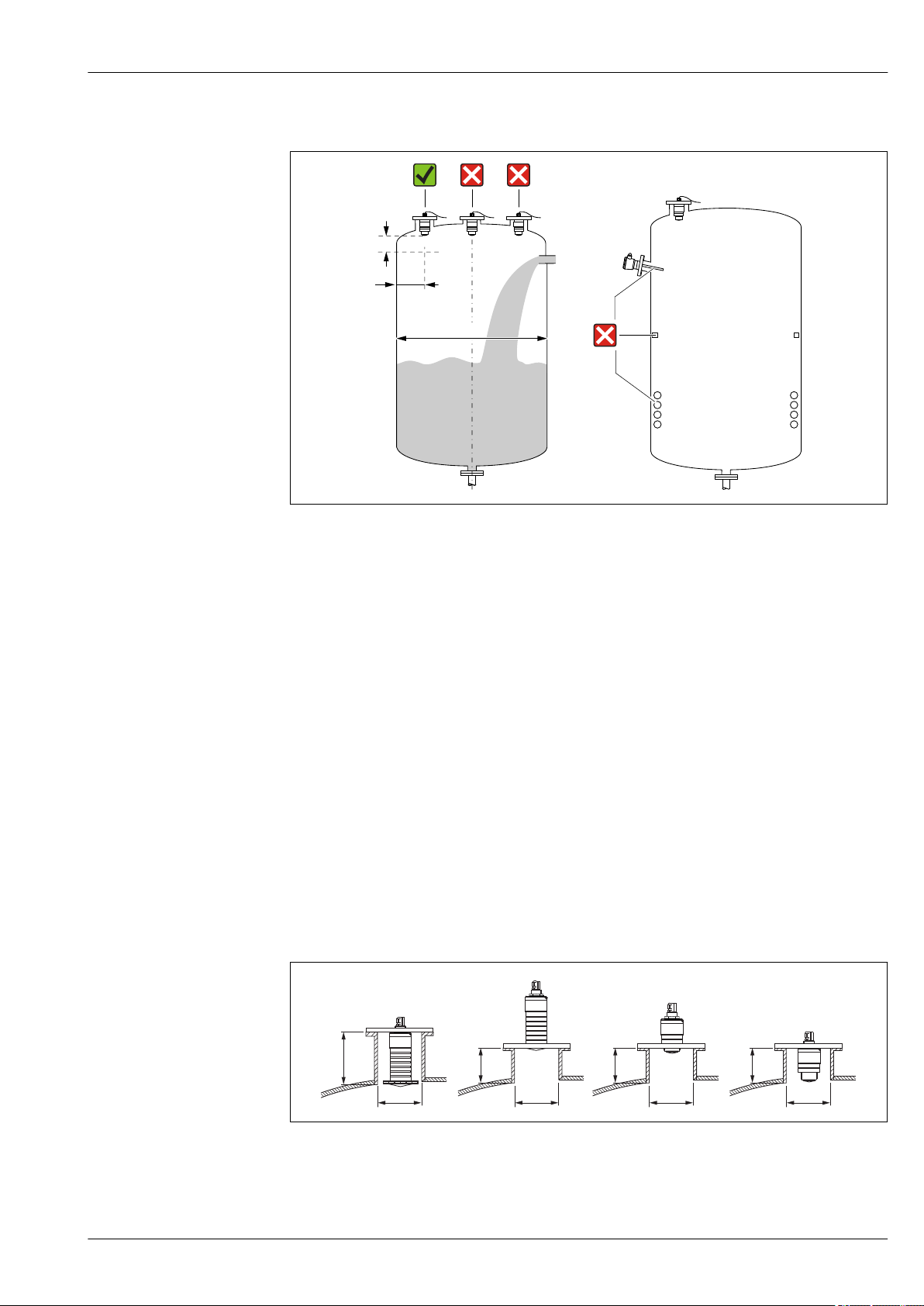
Position for installation on a tank
11 Installation position on a tank
• If possible install the sensor so that its lower edge projects into the tank.
• Recommended distance A wall - nozzle outer edge: ~ ¹⁄₆ of the tank diameter D. Under no
circumstances should the device be mounted closer than 15 cm (5.91 in) to the tank wall.
• Do not install the sensor in the middle of the tank.
• Avoid measurements through the filling curtain.
• Avoid equipment such as limit switches, temperature sensors, baffles, heating coils etc.
• Multiple devices can be operated in one tank without influencing each other.
• No signals are evaluated within the Blocking distance (BD). It can therefore be used to suppress
interference signals (e.g. the effects of condensate) in the vicinity of the antenna.
An automatic Blocking distance of at least 0.1 m (0.33 ft) is configured as standard. However, this
can be overwritten manually (0 m (0 ft) is also permitted).
Automatic calculation:
Blocking distance = Empty calibration - Full calibration - 0.2 m (0.656 ft).
Each time a new entry is made in the Empty calibration parameter or Full calibration parameter,
the Blocking distance parameter is recalculated automatically using this formula.
If the result of the calculation is a value < 0.1 m (0.33 ft), the Blocking distance of 0.1 m (0.33 ft)
will continue to be used.
Nozzle installation
The antenna should be located out of the nozzle for optimum measurement. The interior of the
nozzle must be smooth and may not contain any edges or welded joints. The edge of the nozzle
should be rounded if possible.
A0028410
A0028413
Endress+Hauser 15
12 Nozzle installation
A 80 mm (3 in) antenna
B 40 mm (1.5 in) antenna
Micropilot FMR20 Modbus RS485
90°
90°
90°
90°
90°
_
2
α
W = 2 × D × tan
α
D
W
The maximum length of the nozzle L depends on the nozzle diameter D.
Please note the limits for the diameter and length of the nozzle.
80 mm (3 in) antenna, installation inside nozzle
• D: min. 120 mm (4.72 in)
• L: max. 205 mm (8.07 in) + D × 4.5
80 mm (3 in) antenna, installation outside nozzle
• D: min. 80 mm (3 in)
• L: max. D × 4.5
40 mm (1.5 in) antenna, installation outside nozzle
• D: min. 40 mm (1.5 in)
• L: max. D × 1.5
40 mm (1.5 in) antenna, installation inside nozzle
• D: min. 80 mm (3 in)
• L: max. 140 mm (5.5 in) + D × 1.5
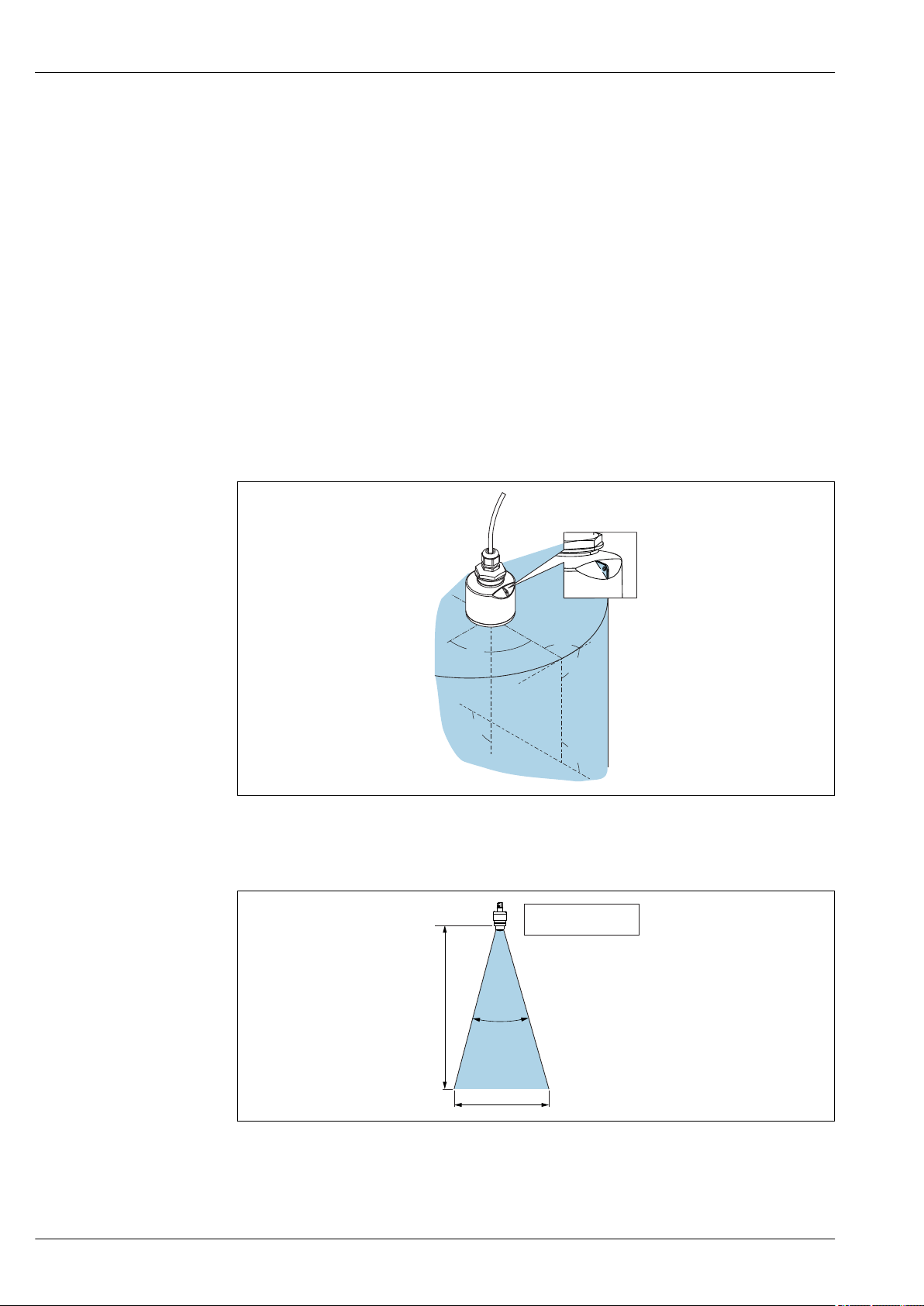
Device alignment for installation on a vessel
• Align the antenna vertically to the product surface.
• Align the eyelet with lug towards the vessel wall as well as possible.
13 Device alignment for installation on a vessel
Beam angle
16 Endress+Hauser
14 Relationship between beam angle α, distance D and beamwidth diameter W
A0028927
A0033201
 Loading...
Loading...