

Encom EN630-2S0004, EN650A-2S0004, EN630-2S0007, EN650A-2S0007, EN630-2S0015 User Manual
...
ISO9001 Quality Management System Authentication
CE Authentication
EN630/EN650A series
0.4-1.5KW
Series Inverter
Ver.2.0
Users’Manual
SHENZHEN ENCOM ELECTRIC TECHNOLOGIES CO.,LTD.

Version:V2.0-A0
Foreword
Thank you for purchasing EN630/EN650A series inverter developed and produced by
Shenzhen Encom Electric Technologies CO., LTD.
EN630 series mini hi-performance flux vector inverter adopts advanced control mode to
achieve high torque, high precision and wide-range speed regulation drive, and it also supports
speed sensorless torque control and PG control torque. It can meet customer all kinds of
requirement to universal inverter. EN630 inverter is a organic combination for customer’s
universal and industrial control purpose and provides practical main-auxiliary frequency
provision, run channel frequency binding, PID regulator, simple PLC, spinning traverse,
programmable input&output terminal control, pulse frequency provision and inbuilt Modbus, Can
bus, Profibus, RS485 and free protocol and other function and platform. It provides high
integration solution for most manufacturing and automation customer and EN630 inbuilt input
phase loss function, output phase loss function, short circuit to earth grounding function and many
other protective function to improve effectively the system reliability and safety.
EN650A series is a mini multi-function permanent magnet synchronous inverter which
combined market demand for synchronous motor and its supporting system, built-in unique
control algorithm, can achieve high torque, high precision, wide speed range control for
permanent magnet synchronous motor and brushless DC motor, supports PG vector and PG
vector control, and also supports speed and torque mode switching.
This brochure provides the installation and wiring settings, fault check and methods,
maintenance and other relative issues to customer. To make inverter assemble and operate rightly,
and use its high performance to best, please read this brochure carefully before installation usage
and keep them well to the final users of inverter.
Please contact our office or dealer anywhere at any moment when you have any doubts or
special demands in using these inverters, and you can also contact our after service center in our
headquarters directly. We will serve you with all our heart.
We reserve our right to notice you if we change contents of this manual.
Content
Content
1 Safety information and use notice points 1
1.1Safety precautions 1
1.2Use notice points 3
1.3 Use notice points 3
2 Inverter Type and Specification 5
2.1 Incoming inverter inspect 5
2.2 Type explanation 5
2.3 Nameplate explanation 5
2.4 Inverter type explanation 6
2.5 Appearance and parts name explanation 6
2.6 Outer size & gross weight 6
2.7 Outer size of keypad and its fixing box 7
2.8 Product technic index and spec 7
3 Installation and wiring 11
3.1 Installation ambient 11
3.1.1 The demands for installation ambient 11
3.1.2 Installation direction and space 11
3.2 Parts disassembly and installation 12
3.2.1 Keyboard disassembly and installati 12
3.2.2 Plastic cover disassembly and installation
3.3 Wiring notice points
3.4 Main loop terminal wiring
3.4.1 Connection between inverter and fitting parts
3.4.2 Main loop terminal wiring
3.5 Basic running wiring diagram
3.6 Control loop collocation and wiring
3.6.1 Relative location and function for control board terminal and slide
Switch
3.6.2 Descriptions for control board terminal
16
12
13
13
14
15
15
16
17
目录
3.6.3 Analog input&output terminal wiring 19
3.6.4 Communication terminal wiring 20
3.7 Installation guidance of anti-interference
3.7.1 noise interference restraining
3.7.2 Field wiring and earth grounding
3.7.3 long distance wiring & Leak current and countermeasure
3.7.4 Installation demand for electromagnetic on-off electronic
device 25
4 Run and operation explanation for inverter
4.1 Run of inverter 26
4.1.1 Running order channels
4.1.2 Frequency-provision channel 26
4.1.3 Work state
4.1.4 Run mode
4.2 Operation and use of key board 30
4.2.1 Keypad layout 30
4.2.2 Keypad function description 30
4.2.3 LED and indicator light
4.2.4 Key board display status
4.2.5 User Management Parameters
4.2.6 Method for operating keypad
4.3 Inverter electrification
4.3.1 Check before electrification
4.3.2 First electrification
5 Function Parameter Schedule Graph 38
5.1 Symbol description
5.2 Function parameter schedule graph 38
6 Troubleshooting
6.1 Failure and countermeasure
6.2 Failure record lookup
6.3 Failure reset 84
21
21
23
24
26
26
27
28
31
31
34
34
37
37
37
38
77
77
83
Content
6.4 Alarm reset 84
7 Maintenance 85
7.1 Routine maintenance 85
7.2 Inspection and replacement of damageable parts
7.3 Repair guarantee 86
7.4 Storage
Appendix A EN650A Mini multi-function PMSM Inverter
Appendix B Free-port Communication Protocol
Appendix C Modbus communication protocol
Appendix D Braking unit and braking resistance
86
87
88
133
152
167
1 Safety information and use notice points
1 Safety information and use notice points
To make ensure personal & equipment safety, this chapter must be read
carefully before the inverter come into use.
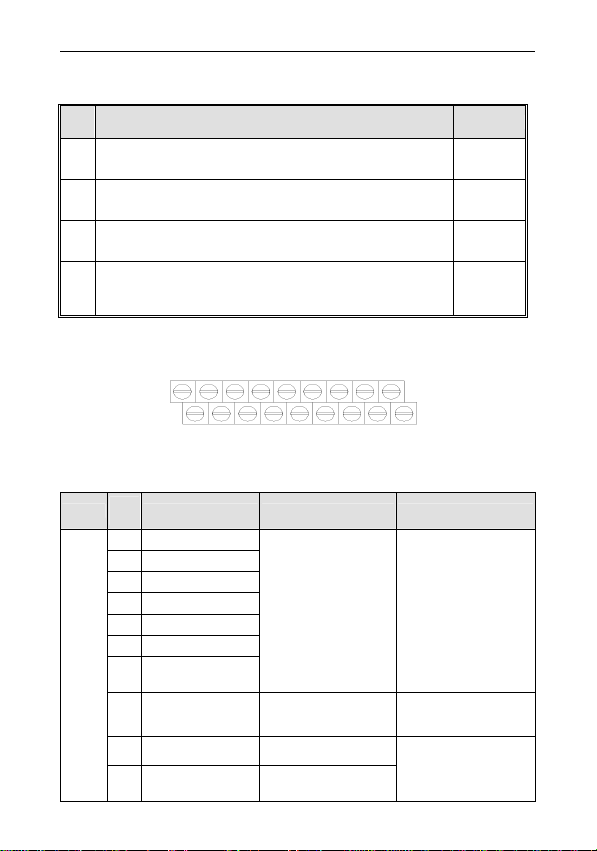
1.1 Safety precautions
There are three kinds of safety warnings in this manual as below:
Symbol
!
!
Note
It may cause human death, serious injury or heavy property loss
with wrong operation.
It may result body or device damage with wrong and timeless
precautions under operation.
Should pay extra cautions when inverter in use under this
symbol
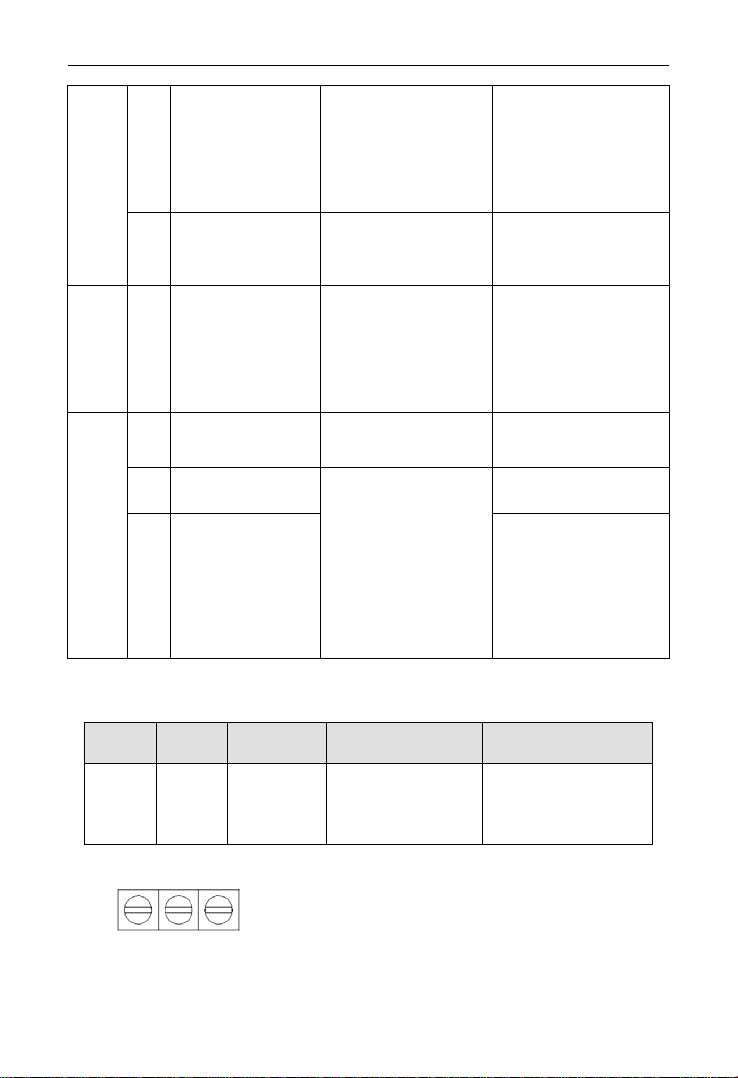
Symbol description
1
1 Safety information and use notice points
g
Forbid to cut off the power source directly when inverter under
running, acceleration or deceleration status. Power source could
cut off when inverter completely in halt and standby status.
!
Otherwise user should be responsible for inverter and device
e and human injury.
dama
(1) Forbid to connect AC power source to output terminal U,V,W,
otherwise it could cause inverter completely damage.
(2) Forbid to install inverter on flammable objects, otherwise it
may cause fire.
(3) Do not install inverter in a environment with explosive gas, it
may cause explosion.
(4) Bare connection terminal should be insulation treatment after
main loop connection, otherwise it may cause electric shock.
(5) Do not operate inverter with wet hands when inverter power
on, otherwise it may cause electric shock.
(6) Inverter earth terminal should be well grounding connection.
(7) Do not open the front cover for wiring when inverter power on.
Inverter wiring and check must handle after 10 minutes of
inverter power off.
(8) Wiring connection should handle by qualified person and not
allow to slip any conductive objects inside inverter, otherwise it
may cause a electric shock or inverter damage.
(9) when inverter stocked for more than 6 months, using voltage
regulator to boost voltage up and keep inverter in standy status
for 1 hour, otherwise it may cause electric shock and explosion.
(1) Forbid to connect control terminals except TA, TB, TC to AC
220V/380V signal, otherwise it may cause inverter completely
damage.
!
(2) Do not install and run inverter when inverter damage or spare
part less, otherwise it may cause fire or human injury.
(3) inverter should install in a place where can accept itself weight,
otherwise it may cause inverter drop down or belongings damage.
2

1 Safety information and use notice points
1.2 Application range
(1) This kind of inverter apply to 3 phase ac asynchronous motor only for general
industry.
(2) It should handle cautiously and consult with manufacturer when inverter apply
to high reliability required equipment which relevant to life, properties and
safety device.
(3) This kind of inverter is the general motor control device in industry. When
inverter apply to dangerous equipment, safeguard should be considerable in
case of inverter failure.
1.3 Use notice points
(1) EN630/EN650A series inverter belong to voltage type inverter, and it is
normal with up temperature, noise and vibration of motor increasing over
power frequency run slightly.
(2) It is required to match inverter with variable frequency motor running at low
speed with constant torque for long time. When match inverter with general
asynchronous motor running at low speed, it should take measures to make
motor heat dissipation or monitoring motor temperature in avoid of motor
flash.
(3) It is necessary to take measures in advance for the damage caused for the bad
lubrication of the reduction box and wheel gear mechanical devices running at
low speed for long time.
(4) It is necessary to assure at first that the use speed range of motor bearings and
mechanical devices, also the increasing of motor vibration and noise should be
considered, when motor run over rated frequency.
(5) It is necessary to select the suitable brake assembly for hoisting device and big
inertia load to make sure the normal work when inverter stripping from power
grid for the overcurrent or overvoltage failure.
(6) Inverter start and stop control through terminal or other normal command
channel, otherwise it may cause inverter damage via connecting inverter input
terminal to big current switch just like contactor direct to start and stop
inverter frequently.
(7) It is necessary to make sure inverter cut off from operation without output,
when inverter and motor connect through switch components just like
contactor etc. Otherwise it will cause inverter damage.
(8) When inverter output frequency within some range, it may meet mechanical
resonance point of load device, through setting jump frequency to avoid it.
(9) Checking power supply voltage within allowed working range before usage,
3
1 Safety information and use notice points
otherwise, it need to change voltage or custom special voltage inverter.
(10)When inverter usage site altitude over1000 meters,inverter should decrease
current to use, output current decrease about 10% of rated current per 1000
meters increase.
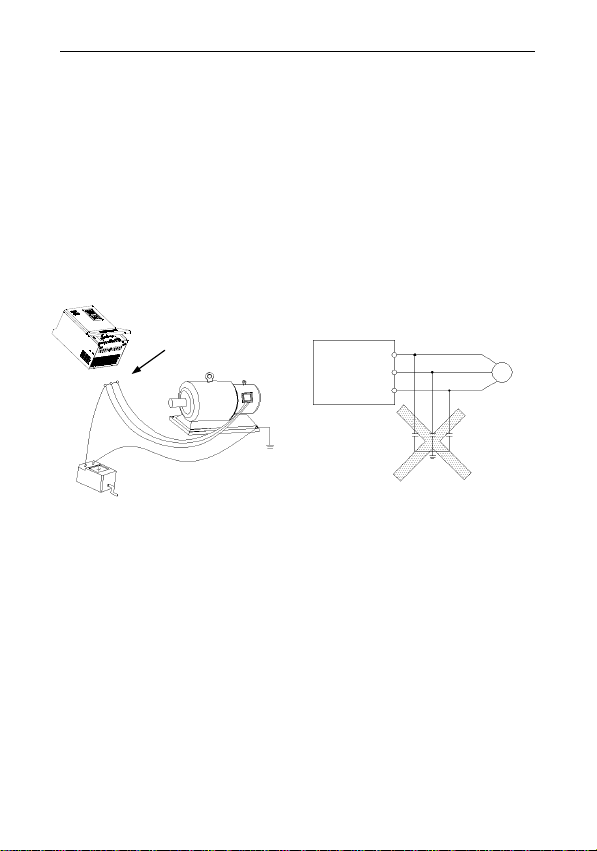
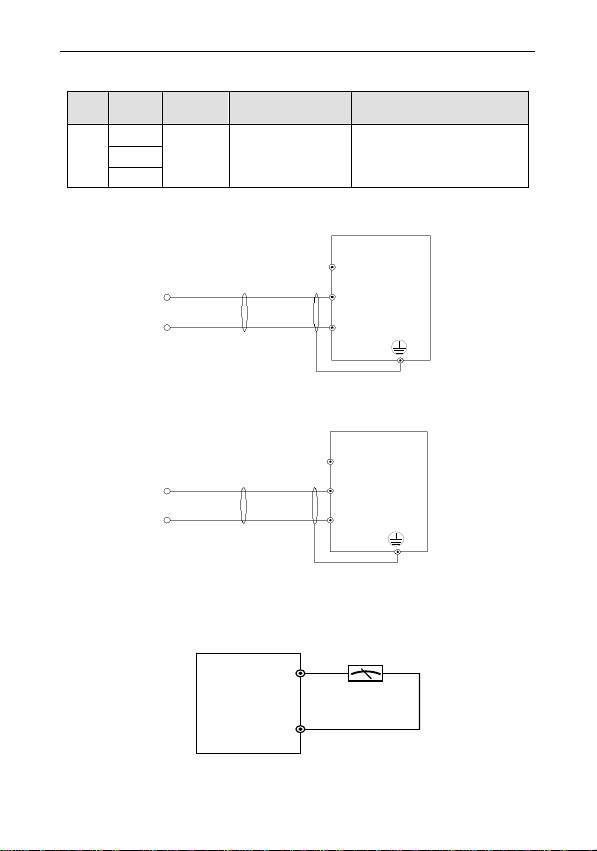
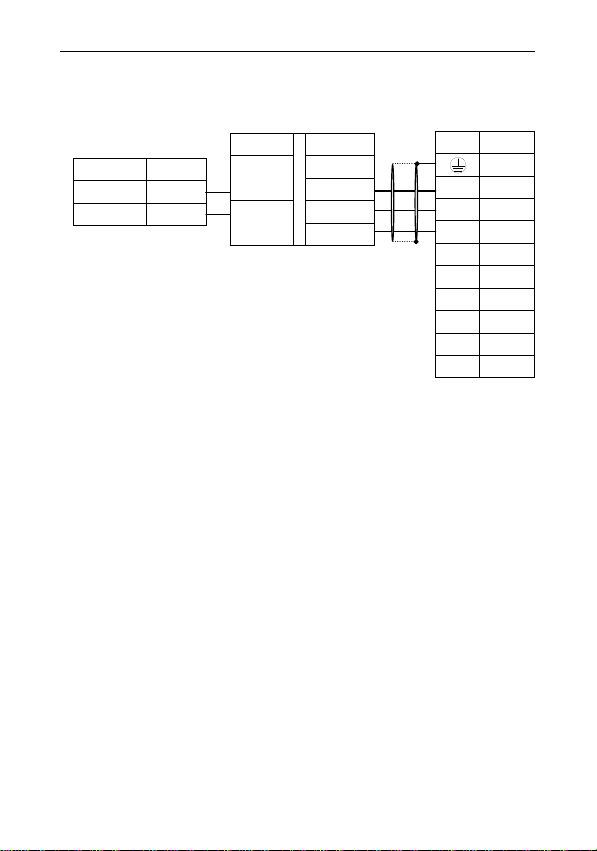
(11)Motor should do insulation check before first usage or reusage after lay aside
for long time. Checking method show as graph 1-1 below with 500V voltage
type megohm meter , insulation resistance should not smaller than 5 MΩ,
otherwise inverter maybe damaged.
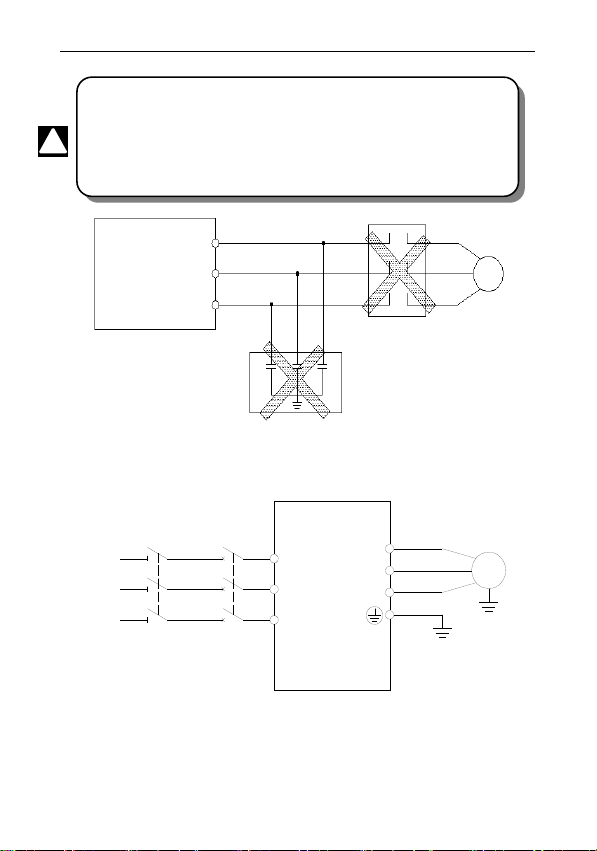
(12)Forbid inverter output side to assemble capacitor to improve power factor or
anti-thunder dependent resistor etc, otherwise it may cause inverter fault trip
or component damage show as graph 1-2.
U
EN630/EN650A
After wiring finish, short-circuit U,V,W
to measure insulation resistance
W
motor
EN630/EN650A
U
V
W
M
Fig.1-1 motor insulation check Fig.1-2 capacitor at output side forbidden
megohmm
Ground
4
2 Inverter Type and Specification
2 Inverter Type and Specification
2.1 Incoming inverter inspect
(1) Check if there is damage during transportation and inverter itself has damage
or fall-off parts.
(2) Check if parts presented in packing list are all ready.
(3) Please confirm nameplate data of the inverter is in line with your order
requirement.
Our product is guaranteed by strict quality system during manufacturing,
packing, transportation etc., please contact our company or local agent rapidly
if some careless omission or mistake arise, we’ll deal with it as soon as
possible.
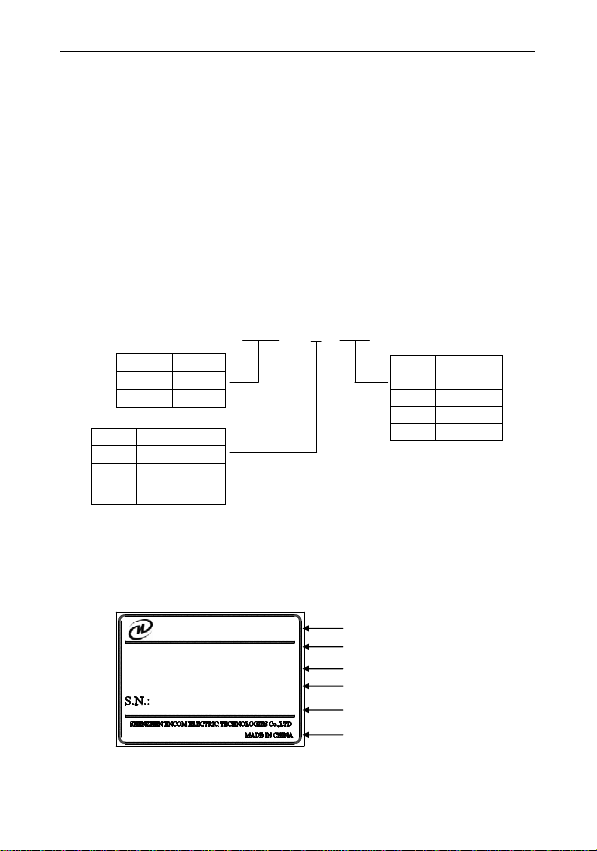
2.2 Type explanation
EN630–4T 0015
Code Name
EN630 series
EN650A series
Code Vo l. gr ad e
2S Single phase 220V
Three phase
4T
380V
Fig.2-1 Type description
2.3 Nameplate explanation
Nameplate presented as figure 2-2 with type and rating data at the bottom of
inverter right side.
EN630 INVERTER
TYPE: EN630-4T0015
SOURCE: 3PH 380V 50/60Hz
OUTPUT: 1.5KW 3.7A
Fig.2-2 Nameplate
Series No.
Model
Rated input vol. And freq.
Motor power and output current
Serial No.
Manufacturer and origin
Match motor
Code
power (KW)
0004 0.4
0007 0.75
0015 1.5
5

2 Inverter Type and Specification
(op
2.4 Inverter type explanation
Table 2-1 inverter type explanation
Inverter type
EN630/EN650A-2S0004 2.5 0.4
EN630/EN650A-2S0007 4 0.75
EN630/EN650A-2S0015 7 1.5
EN630/EN650A-4T0007 2.3 0.75
EN630/EN650A-4T0015 3.7 1.5
Rated output
Current(A)
Adaptable motor
(KW)
2.5 Appearance and parts name explanation
Up cover plate
Operation keypad
digital tube
Digital potentiometer
Terminal wiring cover
Open here to connect brake resistor
tional)
Control cable inlet
vent
Input & output power cable inlet
Fig.2-3 Parts name sketch
2.6 Outer size & gross weight
Fig.2-4 outer dimension
6
2 Inverter Type and Specification
Table 2-2 mounting size
Inverter type
EN630/EN650A-2S0004
EN630/EN650A-2S0007 1.1
EN630/EN650A-2S0015 1.2
EN630/EN650A-4T0007 1.1
EN630/EN650A-4T0015 1.1
W
(mm) H (mm) D (mm)
89 148.5 112.5 124.7 74 138 5
D1
(mm) A (mm) B (mm)
Fix Hole
(mm)
GW.
(kg)
1
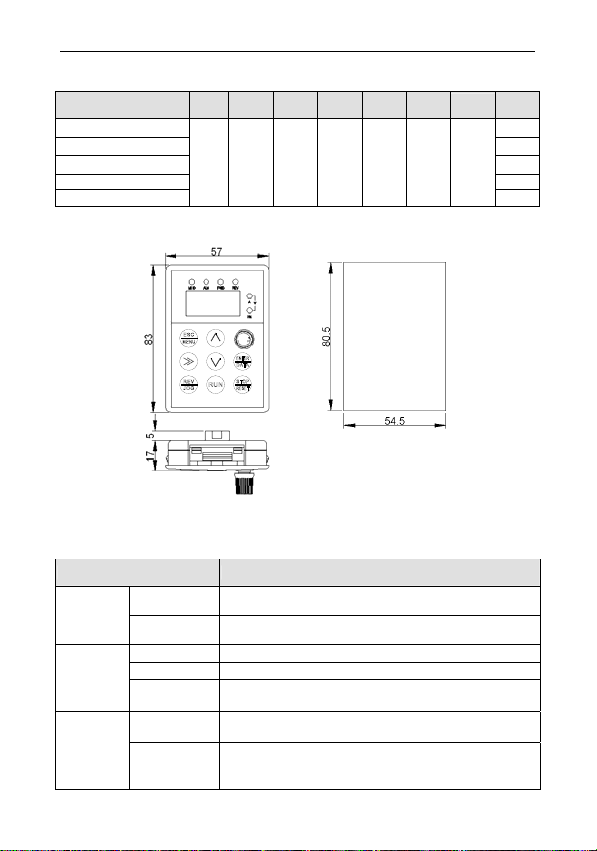
2.7 Outer size of keypad and its fixing box(unit:mm)
2.8 Product technic index and spec
Input
Output
Control
Performance
Fig. 2-5 EN-LED5-D keypad& Hole size of keypad
Item Item description
Rating volt.
frequency
Allowed volt
range
Vo l t age 0 ~380V
Frequency 0~600Hz
Over loading
capacity
Control mode
Velocity control
precision
1 phase 220V Grade:single phase 220V, 50Hz/60Hz;
3 phase 380V Grade:3 phase 380V, 50Hz/60Hz
1 phase 220V Grade:200~260V;
3 phase 380V Grade:320~460V
150% of rated current for 1 minute
vector control, PG vector control, open-loop V/F control, torque
control, PG torque control
±0.5% rated synchronous speed(vector control);
±0.1% rated synchronous speed(PG vector control);
±1% rated synchronous speed(V/F control);
7
2 Inverter Type and Specification
p
by
g
g
jog
y
Speed regulation
range
Start-up torque
Speed fluctuation
Torque control
precision
Torque response
Frequency
precision
Analog
setting
Freq.
Digital
resolut
setting
ion
recision
Exterior
impulse
Torque boost Automatic torque boost;manual torque boost 0.1~12.0%
V/F curve(volt.
Frequency
characteristic)
Acceleration
Deceleration
curve
Power
consumpt
ion brake
brake
DC brake
jog
Multi-section
speed run
Inbuilt PID
controller
Automatic energy
saving run
Automatic
voltage
regulate(AVR)
1:2000(PG vector control)
1:100(vector control);
1:50(V/F control);
1.0Hz:150% rated torque(V/F control);
0.5Hz:150% rated torque (vector control);
0Hz:180% rated torque(PG vector control);
±0.3% rated synchronous speed(vector control);
±0.1% rated synchronous speed(PG vector control);
±10% rated torque(vector control,torque control);
±5% rated torque(PG vector control,PG torque control).
≤20ms(vector control);
≤10ms(PG vector control);
Digital setting:max. frequency×±0.01%;Analog setting:max.
frequency×±0.5%
0.1% of max. frequency
0.01Hz
0.1% of max. frequency
Setting rated frequency at the range of 5~650Hz,
constant torque, degressive torque 1, de
degressive torque 3, self-defined V/F total 5 kinds of curve.
Two modes:strai
acceleration and deceleration; 15 kinds of acceleration and
deceleration time,time unit (0.01s, 0.1s, 1s) for option ,max.
time for 1000 minutes.
inbuilt brake unit,only add brake resistor between(+)and PB.
Start, stop action for option, action frequency 0~15Hz,action
current 0~100% of rated current,action time 0~30.0s
Jog frequency range:0Hz~up limit frequency;
and deceleration time 0.1~6000.0 seconds for setting.
Realized by inbuilt PLC or control terminal; with 15 section
speed, each section speed with separately acceleration and
deceleration time; with inbuilt PLC can achieve reserve when
power down.
Convenient to make closed-loop control system
Optimize V/F curve automatically to achieve power saving run
according to the load status.
Automaticall
voltage fluctuation
ht line acceleration and deceleration; S curve
keep output voltage constant, when the power grid
choosing
ressive torque 2,
acceleration
8
Running
y
y
g
p
y
g
g
g
g
g
function
Input output
characteristic
Unique
function
keypad
Automatic
current limiting
carrier
modulation
Speed tracking
restart
running
command
specified channel
Running
frequency
specified channel
Binding function
Digital input
channel
Analog input
channel
Pulse output
channel
Analog output
channel
Rapid current
Monopulse
control
Fixed length
control
Timing control
Virtual terminal
Keypad display
Button Locked Lock all or part of the buttons
Current limited automatically under run mode in avoid of inverter
over-current frequently to trip.
Modulate carrier wave automatically according to the load
characteristic.
Make rotating motor smoothly start without shocking
pad specified, control terminal specified, communication
Ke
specified can switch through various means.
Main & auxiliar
fine control. Digital specified, analo
ulse width specified, communication specified and others, which
can be switched by many means at any time.
Run command channel and frequenc
together randomly and switch synchronously
Channel 7 for universal di
channel 1 can be used as pulse input channel, with max. input
50KHz.
Channel 2 for analog input channel, AI1 can choose 4~20mA or
0~10V output,AI2 is differential input channel,4~20mA or
-10~10V for option.
0.1 ~ 20KHz pulse square signal output to achieve setting
frequency, output frequency and other physical quantity output.
Channel 1 for analog signal output, AO can choose 4~20mA or
0~10V to achieve settin
physical quantity output.
Limit inverter over current to the greatest point, and make it run
limit
more stably
Suitable for workin
inverter start and stop, first press to start, then press to stop, and
that cycle repeats. Its very simple and reliable.
Realize fixed length control
Timing control function: setting time range 0.1Min ~
6500.0Min
Five
control
The parameters as settin
voltage, output current can be displayed
specified to a realize one main adjusting and one
site where need one button to control
roup virtual input & output IO can realize simply logical
2 Inverter Type and Specification
specified, pulse specified,
specified channel can bind
ital input, max. Frequency 1KHz,
frequency, output frequency and other
frequency, output frequency, output
9
2 Inverter Type and Specification
g
y
g
Motor power on Shot circuit test, input & output phase loss
protection, over-current protection, over volta
Protection function
Application site
Envi
ronm
ent
struc
ture
Note
Altitude
Environment temperature
Environment humidity Smaller than 95%RH,no drop condenses
Vibration Smaller than 5.9 M/S²(0.6g)
Storage temperature -40℃~+70℃
Protection grade IP20
Cooling mode Forced air cooling and natural
Installation mode
To get a perfect usage performance of the inverter, Please check and
select right type according to this chapter before wiring.
It is necessary to select right type, otherwise it may cause motor
!
abnormal run or inverter damage.
voltage protection, over heat protection, overload protection,
under load protection, rela
protection and no stop protection under power off.
Indoor, not bare to sunlight, no dust, no corrosive
flammable gas, no vapor, no water drop or salt etc.
Under 1000 meter.(above 1000 meter require to reduce volume to
use, output current reduce about 10% of rated current per 1000
meter high)
-10℃~+40 ( environment temperature between 40℃℃~50 , ℃
need to reduce volume or strengthen heat sink )
Wall hanging
absorption protection, terminal
e protection, under
as, no
10
3 Installation and wiring
3 Installation and wiring
3.1 Installation ambient
3.1.1 The demands for installation ambient
(1) Installed in drafty indoor place,the ambient temperature should be within
-10ºC~40ºC,it needs external compulsory heat sink or reduce the volume if
temperature is over than 40ºC.
(2) Avoid installing in places with direct sunlight, much dust, floating fiber and
metal powder.
(3) Don’t install in place with corrosive, explosive gas.
(4) The humidity should be smaller than 95%RH,without condensation water.
(5) Installed in place of plane fixing vibration smaller than 5.9m/s²(0.6g).
(6) Keep away from electromagnetic disturbance source and other electronic
apparatus sensible to electromagnetic disturbance.
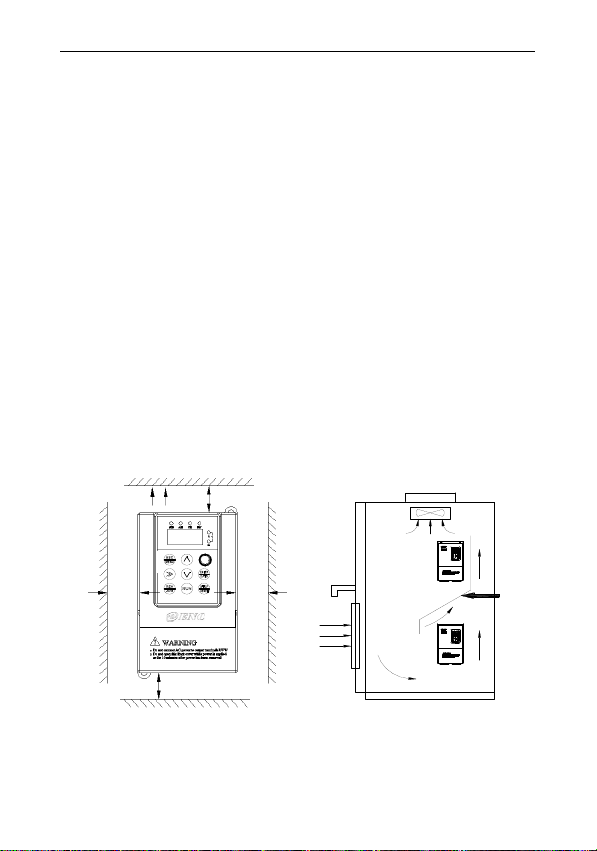
3.1.2 Installation direction and space
(1) Normally the inverter should be mounted vertically, horizontal mounting will
seriously affect heat dissipation and the inverter must be used in lower
volume.
(2) Demand for minimum mounting space and distance,please see Fig.3-1.
(3) When installing multiple inverters up and down, leading divider must be
applied between them, see fig. 3-2.
Exhaust
fan
50mm
above
Fig.3-1 mounting space Fig.3-2 mounting of multiple inverters
100mm above
100mm above
50mm
above
Leading divider
导流隔板
11
3 Installation and wiring
3.2 Parts disassembly and installation
3.2.1 Keyboard disassembly and installation
(1) Disassembly
Let the forefinger press finger inlet on the keypad,press fixing flexible plate
on the top lightly,draw it outward, then you can disassemble the keypad.
(2) Assembly
First interface the fixed hook of on the bottom of keyboard with the keyboard
installation claw of inverter, then press the fixed shrapnel on the top of keyboard
to push it assemble well properly (keyboard assemble well when sounding of
crisp).
3.2.2 Plastic cover disassembly and installation
(1) Disassembly
Located the thumbs to the side bayonet,with thumbs press inside and pull
upside at the same time until the bayonet open between cover and whole case,
then pull back cover to make it off the inverter.
3.3 Wiring notice points
!
Assure power be cut off completely for above 10 m⑴ inutes before
wiring, otherwise there is danger of getting electric shock.
Forbid connecting power wire to output U, V, W of the inverter.⑵
If there is current leakage inside inverter, when current leaka⑶ ge
greater than 5mA for medium & big power inverter, inverter and motor
must be earth grounding for safety assurance, and the diameter of earth
grounding copper cable is greater than 3.5mm², resistor less than 10Ω.
Before shipment compression resistance⑷ test of the inverter is
passed, so users should not conduct compression resistance test again.
Do not add absorbing capacitor or other resistance⑸ -capacitor
absorbing device between inverter and motor; also do not add
electromagnetic contact, show as Fig.3-3
To provide inverter over⑹ -current protection in output side and
convenient maintenance under power off, it should be connected to
power source through relay.
Relay, input & output circuit wiring (X1⑺~X7、Y1、Y2/DO、TA、
TB、TC、AI1、AI2、AO、485A、485B) should select greater than
0.75mm² stranded wire or shielding wire. One end of the shielding layer
hang in the air, and the other end connect to inverter earth grounding
terminal, connection wire shorter than 20m.
12
3 Installation and wiring
(1)Before wiring, assure power supply is cut off completely for 10
minutes and all LED indicator light extinguished.
(2) Wiring can only be done by professional person trained and qualified.
(3) Before power on, check if voltage grade of the inverter is in line with
!
that of power supply volt., otherwise will cause personnel injured and
L1(R)
device da
inverter
U
V
W
、
Fig.3-3 Forbid to use contactor and absorbing capacitor
3.4 Main loop terminal wiring
Power
三相
source
交流
电源
Air switch
空气开关
breaker
(断路器)
contactor
接触器
Fig.3-4 main loop simple wiring
EN630/
EN650A
R
S
T
U
V
W
M
M
13

3 Installation and wiring
3.4.1 Connection between inverter and fitting parts
(1) Breaking device like isolation
Switch must assemble between power
source and inverter to keep persona
safety under repairing and
R
S
T
N
inverter requirement for compulsory power off.
(2) There must be over-current
protection breaker or fuse in inverter
power supply circuit to avoid failure
expanding because of the second device failure.
(3) AC input reactor
When high harmonics between inverter
and power supply is strong which cannot
meet system requirement or input side
power factor need to improve, ac input reactor
can be added.
(4) Contactor is used to power supply only,
do not use it to control inverter start and stop.
(5) Input side EMI filter
EN630/EN650A
UVW
Optionally EMI filter to restrain high frequency
transduction interference and radio-frequency
interference from inverter power line.
(6) Output side EMI filter
Choosing optionally EMI filter to
restrain radio-frequency Interference
and wire leakage current from inverter
output side.
Fig.3-5 connection of inverter and
fitting parts
(7) AC output reactor
Installing AC output reactor is suggested
to avoid motor insulation damage, oversize current leakage and inverter
frequent protection when connecting wire between inverter and motor exceeds
50m. While to consider the voltage decrease issue of AC output rector, it can
follow to boost inverter input & output voltage or use smaller power motor to
avoid motor damage.
(8) Safety earth ground wire
Inverter and motor must be earth ground connection, connection wire should
select as shorter and thicker as above 3.5mm² multi-core copper wire, and
earth grounding resistance smaller than10Ω.
14
空气开关
Isolation switch
断路器或熔断器
Breaker or fuse
Ac input reactor( In option)
交流输入电抗器(可选)
Contactor
接触器
Input EMI filter( In option)
输入EMI滤波器(可选)
TSR
(+)
制动单元(可选)
Brake unit( In option)
(-)
BrS0~10485A
Input EMI filter( In option)
输出EMI滤波器(可选)
Ac output reactor(Note 1
交流输出电抗器(可选)
M
3 Installation and wiring
t
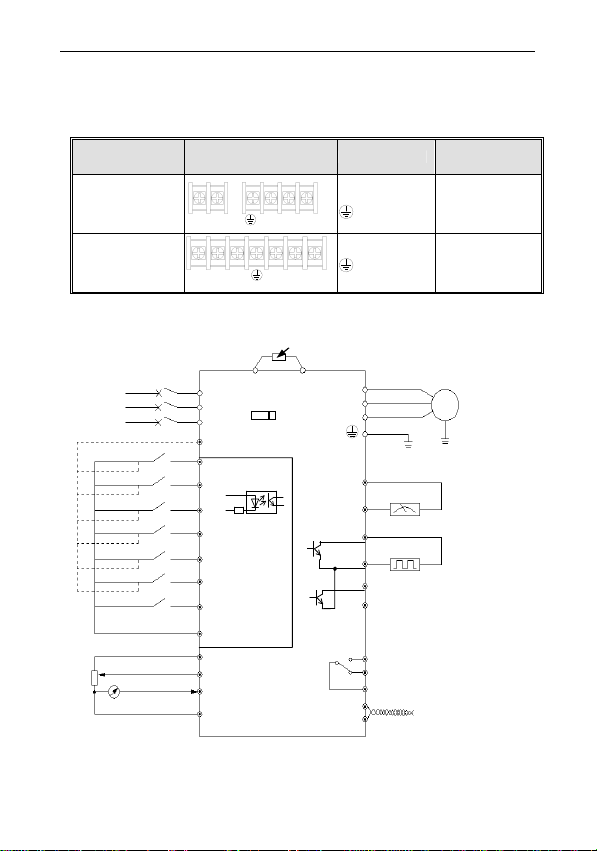
3.4.2 Main loop terminal wiring
Main loop input output terminal show as table 3-1.
Table 3-1 main loop input output terminal description
Adapted type Main loop terminal Terminal name Function description
EN630/EN650A-2S0004
~
EN630/EN650A-2S0015
EN630/EN650A-4T0007
~
EN630/EN650A-4T0015
L1(R)
L2(S)
L3(T)
U V
U V
W
48
L1
L2
U、V、W
L1(R)、L2(S)、L3(T)
U、V、W
Zero line
Live line
Grounding terminal
3 phase AC output terminal
3 phase AC input terminal
Grounding terminal
3 phase AC output terminal
3.5 Basic running wiring diagram
Note 1:When X1~X7 terminal input signal low electric level valid , push SW1 to “L” side.
Note 2:When X1~X7 terminal input signal high electric level valid , push SW1 to “H” side.
Breaker
Power source
Note 2
Multifunction select 1
Multifunction select 2
Multifunction select 3
Multifunction select 4
Multifunction select 5
Multifunction select 6
Multifunction selec
Note 1
Speed command
0~10V or 4~20mA
7
-10~10V
P+
L1(R)
L2(S)
H
L3(T)
+10V
X1
X2
X3
Internal optocoupler
isolation input
X4
X5
X6
X7
(Multifunction select 7 can
use as high speed pulse
input)
COM
+10V
AI2
AI1
GND
Fig.3-6 basic wiring diagram
Brake resistor (external, fitting parts: connect to
right side of inverter)
PB
SW1
L
EN630/EN650A
Y2/DO
Y1
+24V
485A
485B
U
V
W
GND
AO
COM
2 circuit open collector output
Provide +24V power source outside
TA
Fault relay output
TB
TC
M
Analog meter 4-20mA
current signal or 0~10V
voltage signal
frequency meter output 24V
pulse signal
Standard 485
communication
15
3 Installation and wiring
y
3.6 Control loop collocation and wiring
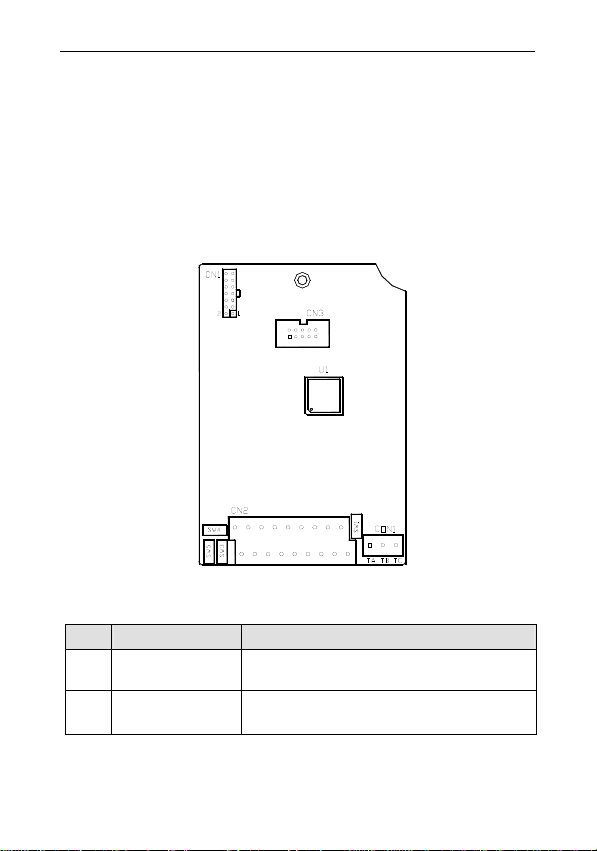
3.6.1 Relative location and function for control board terminal and slide
switch:
Control board terminal and slide switch location show as Fig 3-7.
User terminal function explanation can be seen in table 3-2,The setting
description and function of slide switch check table3-3, terminal CN3 is for
manufacturer usage. Please do the right terminal wiring and setting to the switch
on control board before using inverter and it is suggested to use greater than 24
AWG cable to connect terminal.
Fig 3-7 sketch map of CPU board
T able 3-2 function description of terminal provided for user
No. Function Description
CON1 Fault relay signal output
External terminal input &
CN2
output quantity control
when inverter alarm failure, the rela
will close.
Use the terminal when external terminal to control inverter
operate.
16
open normal switch
3 Installation and wiring
g
g
Table 3-3 Slide switch function description for users
No. Function Default
Analog AO output,0~10V & 4~20mA switch.
SW4
Locate “V” side, 0~10V output;locate “I” side,4~20mA output
Analog AI1 input,0~10V & 4~20mA switch.
SW3
Locate “V” side,0~10V input;locate “I” side,4~20mA input
Analog AI2 input,-10~10V & 4~20mA switch.
SW5
Locate “V” side,-10~10V input;locate “I” side,4~20mA input
Xi terminal input valid electric level switch:locate “H” side, Xi input hi
SW1
electric level valid(valid voltage range 15~30V);locate “L” side,Xi
input low electric level valid(valid voltage range 0~6V)
0~10V
0~10V
-10~10V
h
Low electric
level valid
3.6.2 Descriptions for control board terminal
⑴ CN2 terminal layout as following
X1 X2 X3 X4 X5 COM X6 X7 485A
+10V
AI1 AI2 GND AO Y2/DO +24V Y1 485B
⑵ CN2 terminal function description show as Table 3-4
T able 3-4 function table for control board terminal
Symb
Type
Multfun
ction
input
terminal
+10V +10V power source
COM
GND
Description Terminal Function Specification
ol
X1 Multifunction input 1
X2 Multifunction input 2
X3 Multifunction input 3
X4 Multifunction input 4
X5 Multifunction input 5
X6 Multifunction input 6
Multifunction input 7/
X7
high-speed pulse input
Common terminal +24V
power negative polarity
+10V power ne
polarity
Programmable defined as
multifunction switch
quantity input terminal,
see switch quantity input
function parameter (F08
group) input terminal
description.
Provide power source
+10V outside(negative
polarity:GND)
+24V earth
Analog signal and +10V
ative
power source reference
Input impedance: R=2KΩ
Max. input
frequency:200Hz
X6、X7 can used as encoder
input
Max. input
frequency:50KHz
Input voltage range:15~
30V
Max. output current:10mA
17
3 Installation and wiring
Analog
SW5.
polarity:COM)
Open circuit collector
Open circuit collector
/ high
speed pulse input
frequency max. is 20KHz.
AI1 Analog input AI1
inpu
AI2 Analog input AI2
Analog
function
terminal
AO Analog output
output
+24V +24V power source
Multi-
output
Y1
Y2/D
O
output terminal 1
output terminal 2
terminal
Accept analog
voltage/current quantity
input,voltage, current
selected by switch SW3,
factory default is voltage.
(reference:GND)
Accept analog voltage
quantity input,voltage,
current selected by switch
Provide analog
voltage/current quantity
output,output voltage/
output current selected by
switch SW4,factory
default is output voltage.
(reference:GND)
Provide power source
+24V outside(negative
Programmable defined as
multi-function pulse signal
output terminal, particulars
see switch quantity, analog
quantity function parameter
(F09 Group) terminal
introduce
Input voltage range:0~
10V (Input impedance:
20KΩ)
Input current range:4~
20mA (Input impedance:
250Ω)
resolution:1/4000
Input voltage range:-10~
10V (Input impedance:
20KΩ) resolution:1/2000
current output range:4~
20mA
voltage output range:0~
10V
Max. output current:100mA
Max. output voltage:30V
Max. output current:50mA
Through F00.22 to select
terminal output means as
open collector output, with
same specification as Y
terminal, when used to high
pulse output: output pulse
voltage is 24V, output
⑴ RS485 terminal function description show as Table 3-5
Table 3-5 RS485 terminal function on control board
Type Symbol Description Terminal Function Specification
communi
cation
(4) terminal CON1, layout as following:
(5) CON1 terminal function description show as Table 3-6
18
485A
485
communicatio
n interface
485 differential signal
positive terminal
Standard 485
communication port
should use shielding wire
or twisted wire.
3 Installation and wiring
Table 3-6 CON1 terminal function on control board
Type Symbol Description Terminal Function Specification
Relay
output
terminal
TA
TB
TC
Fault output
relay
normal:TB-TC
close,TA-TC open
alarm:TB-TC open,TA-TC
close
TB-TC: close normal,TA - TC :open normal.
Contactor capacity :
AC250V/2A (COSΦ=1)
AC250V/1A (COSΦ=0.4)
DC30V/1A
3.6.3 Analog input&output terminal wiring
(1) AI1 receive analog voltage signal input, wire as below:
or4~20mA
+
―
0~+10V
hield cable near-end earth
S
grounding
+10V
EN630/EN6
AI1
50A
GND
Fig.3-8 AI1 terminal wiring diagram
(2) AI2 receive analog signal input, input voltage
-10~+10V20mA
+
―
or 4~20mA
Shield cable near-end
earth grounding
wire as below:
(-10~10V)and input current (4~20mA),
+10V
EN630/
AI2
EN650A
GND
Fig.3-9 AI2 terminal wiring diagram
(3) analog output terminal AO wire
analog output terminal AO external connect to analog meter can indicate
several physical quantity, wire as below:
EN630/
EN650A
AOL1
GNDL2
Analog meter
Fig.3-10 AO terminal wiring diagram
19
3 Installation and wiring
(1) Under analog input mode, filter capacitor or common mode
choke can be installed between AI1 and GND or AI2 and GND.
(2) Analog input and output signal can be interfered easily by
ambient environment, it need use shield cable for connection and
Note
earth grounding well as short as possible.
3.6.4 Communication terminal wiring
EN630/EN650A inverter provide RS485 serial communication interface to
user.
The following wire connection can make up of single-main single-sub
control system or single-main multi-sub control system. To use host computer
software(PC or PLC controller)can realize real time monitoring and operation to
inverter,and to achieve complicated run control like long-distance control, high
degree automation. It can also use one host inverter and others slave inverter to
make up of the cascade or synchronous control inverter network.
Inverter ⑴ RS485 interface and other device with RS485 interface wire connection
show as following
EN630
/EN650A
RS485
A(485+)
B(485-)
A(485+)
B(485-)
Device with
RS485 o
EN630
/EN650A
r
Fig.3-11 Communication terminal wiring
20
3 Installation and wiring
⑵ Inverter RS485 interface and host computer (device with RS232 interface)
connection:
EN630/EN650A inverter
description name
Signal B
Signal A
RS232/RS485 converter
name description
B
A
+5V
TXD
RXD
GND
Shield cable
Host computer
Signal
Pin No.
shell
RXD 2
TXD 3
GND 5
DTR 4
DSR 6
RI 9
CD 1
RTS 7
CTS 8
Fig.3-12 RS485 communication wiring
3.7 Installation guidance of anti-interference
Inverter main circuit consist of high power semiconductor and switch
component, for which will generate electromagnetic noise when working, and to
avoid or reduce inverter interference to ambient environment, this chapter
introduce installation means to restrain interference from aspect of interference
restrain, field wiring, system earth grounding, leakage current and power filter
usage.
3.7.1 noise interference restraining
Inverter interference generating for run may have effect to nearby electronic
device and the effect depend on the inverter installation surrounding
electromagnetic environment and the restrain interference ability of the device.
(1)interference noise type
Because of inverter working principle, there are mainly 3 kinds of noise
interference source::
⑴ circuit conduction interference;
⑵ space emission interference;
⑶ electromagnetic induction interference;
21
3 Installation and wiring
ductio
p
Circuit conduction
interference
Leak current
漏电流接
earth grounding
地线回路
wire loop
干扰
interference
route
路径①
(2)noise transmission route
22
Power wire high
电源线高次
harmonic current
谐波电流传
conduction
导干扰
interference
route
路径②
Inverter main circuit
变频器的主回路
switch and switch
开关与开关电源
ower radio
的射频干扰
interference
路径③
route
Fig.3-13 interference noise type
Sensor power
sensor
①
Fig.3-14 noise interference transmission route diagram
②
⑤
⑤
Interference Type
Space emission
interference
Motor wire
电机线
U,V,W radio
U、V、W
interference
的射频干扰
路径④
route
⑧
inverter
⑦
motor
Input wire
induction
⑥
Electromagnetic
induction interference
输入线
感应
route
路径⑥
Power wire
电源线
R,S,T radio
R、S、T
interference
的射频干扰
route
路径⑤
Wireless
device
Inverter power
变频器功率
component
部件感应
n
in
route
路径⑦
TV
meter
Output wire
induction
输出线
感应
路径⑧
route
3 Installation and wiring
g
p
g
g
(3)Basic countermeasure for restrain interference
Table 3-7 interference restrain countermeasure
Noise
spread
road
①
②
③④⑤
⑥⑦⑧
Earth
up of the closed-loop and leakage current of inverter earth grounding
cable will make device perform wrong action. It will decrease wrong
action when device not connect to earth grounding.
When the power of
same power source, high harmonic generating from inverter will
transmit the voltage and current along with the power line which will
interfere other devices within the same power source system. Take
some restraining measures as below:install electromagnetic noise
filter at inverter input end; use isolation transformer to isolate other
devices; connect power end of peripheral device to remote power
grid;add power ferrite filter magnetic ring to inverter R、S、T three
phase wire to restrain high harmonic current conduction
Keep other sensitive devices and si
inverter. it should use shield wire and make the shield layer single
end earth grounding. Besides keep distance from inverter and its
input & output wire as possible as. When signal wire need to
intersect with strong current cable, it should make them orthogonal
crossing not parallel.
Install high frequency noise filter (ferrite common code choke,
also called magnetic ring) at the bottom end of the inverter input &
output to restrain radio frequency interference of dynamic wire
effectively.
Motor cable should be placed in protective object with large
thickness, such as placed in larger thickness(over 2mm) pipeline or
buried in cemented tank. Putting dynamic wire in metal tube and
connect to earth grounding with shield wire (motor cable use 4-core
cable, one side is earthed through the inverter, the other side
connected to motor casing).
To prevent wire parallel or bundled of stron
should keep away from inverter assemble device, and wiring should
away from inverter R,S,T,U,V,W power line. Devices with high field
and high magnetic field should notice the corresponding installation
position of inverter and keep distance and orthogonal crossing.
Countermeasure of weakening effect
rounding cable of peripheral device and inverter wiring make
eripheral device and inverter power belong to the
nal wire installed away from
and weak current, it
3.7.2 Field wiring and earth grounding
inverter terminal motor connection wire ⑴(U,V,W terminal output wire)and
inverter terminal power connection wire(R,S,T terminal input wire)should
keep distance enough as more as 30cm。
23
3 Installation and wiring
U⑵ ,V,W terminal 3 motor wires should be placed in metal tube or metal wiring
tank as possible as.
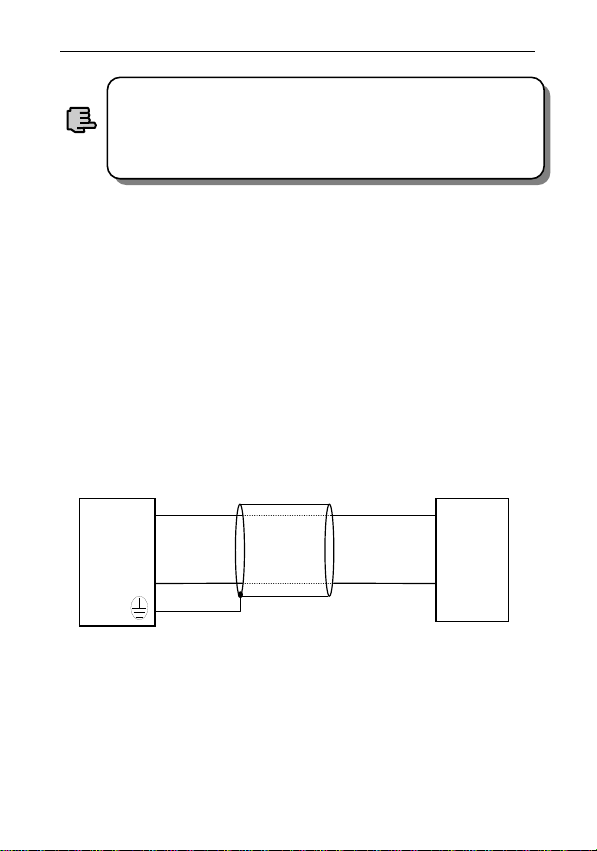
Generally control signal wire should use shield cable, when shield layer⑶
connect to inverter terminal, it should be the single end earth grounding
which closed to inverter side.
Inverter⑷ terminal earth grounding cable must directly connect to floor, it cannot
connect to earth grounding through other device.
⑸ strong current cable(R,S,T,U,V,W) cannot parallel wiring closely with control
signal wire, and bundled together is prohibited. It should keep distance from
over 20~60 cm(relative to strong current size). When it’s necessary to intersect,
it should be orthogonal crossing, show as Fig.3-15.
电源线或电动机线
Power wire or motor cable
控制信号线
Control signal wire
Fig.3-15 system wiring demand
earth grounding wire for strong current should separately connect to earth ⑹
grounding with control signal and sensor earth grounding wire for weak current.
Forbid to connect inverter ⑺ input terminal(R,S,T) to other devices.
3.7.3 long distance wiring & Leak current and countermeasure
When inverter connect to motor in a long distance, high harmonic wave
through distributed capacitance will generate leak current to earth and
wire-to-wire. Restraining methods as below:
install ferrite magnetic ring or output reactor at the inverter output terminal.⑴
When rea ctor in stalle d with r ated voltage drop more 5% and long
wiring to U, V, W terminal, it would reduce motor’s voltage
apparently. When motor run at full load, it is possible to flash
!
motor, and it should be used by derating or boosting input and
output voltage.
24
3 Installation and wiring
(2) as carrier frequency low, the motor noise would increase accordingly.
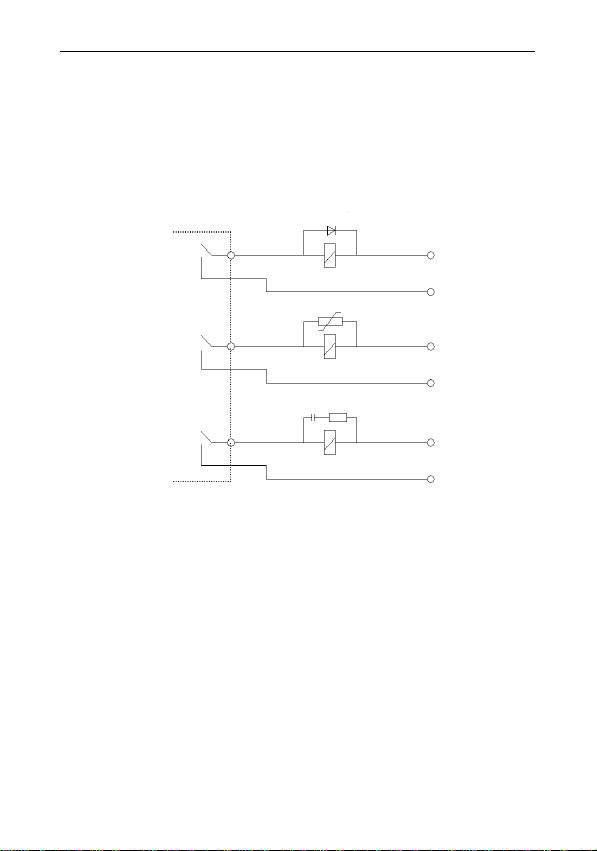
3.7.4 Installation demand for electromagnetic on-off electronic device
It should pay attention that surge absorber must be installed when electromagnetic
on-off electronic device like relay, electromagnetic contactor and electromagnetic
iron generating noise easily and largely installed near to inverter or in the same
control cabinet, show as Fig. 3-16.
Inverter or
变频器或其
other devices
它电气设备
diode
二极管
压敏电阻器
varistor
filter
RC-滤波器
+
24V
DC
_
~
220V
AC
~
~
220V
AC
~
Fig.3-16 install demand for electromagnetic on-off device
25

4 Run and operation explanation for inverter
4 Run and operation explanation for inverter
4.1 Run of inverter
4.1.1 Running order channels
There are 3 kinds of order channel for controlling run action of the inverter
such as run, stop, jog etc.
0:keypad
Control by key 、 、 on keypad (factory default).
1:Control terminal
Use control terminal Xi(defined as FWD), Xi(defined as REV) and COM to
make of double-line control, or use anyone terminal of X1~X8 except terminal
FWD and REV to make of three-line control.
2:Communication port
Control run and stop of the inverter through upper machine or other device
which can communicate with the inverter.
Choose order channel by setting function code F01.15;and also can choose
by multi-function input terminal (F08.18~F08.25 choose function 49,50,51,52,53).
Please make switching debugging in advance when switch the order
channel to check if it can fulfill system requirement, otherwise have
!
danger of damaging device and injuring personal.
4.1.2 Frequency-provision channel
EN630/EN650A includes main frequency provision and assist frequency
provision:
Main frequency provision:
0: keypad analog potentiometer provision;
1: AI1 analog setting;
2: AI2 analog setting;
3: terminal UP/DOWN adjustment provision;
4: communication provision (Modbus and external bus share a main frequency
memory);
5: Reserved;
26

4 Run and operation explanation for inverter
6: Reserved;
7: high speed pulse provision (X7 terminal need select the corresponding
function);
8~14: Reserved
Assist frequency provision:
0: keypad analog potentiometer provision;
1: AI1 analog setting;
2: AI2 analog setting;
3: terminal UP/DOWN adjustment provision;
4: communication provision (Modbus and external bus share a main frequency
memory);
5: Reserved;
6: Reserved;
7: Terminal pulse provision (X7 terminal need select the corresponding
function);
8~20: Reserved
4.1.3 Work state
Work state of EN630/EN650A includes of Waiting state, Running state and
Parameter setting state.
Waiting state :
If there is no running command after the inverter electrified or after stop
command during running state, the inverter enters into waiting state.
Running state:
The inverter enters into running state after receiving run command.
Parameter setting state:
After receiving the parameter identification command, enter the parameter
setting state, then turning into the shutdown state.
27

4 Run and operation explanation for inverter
d
y
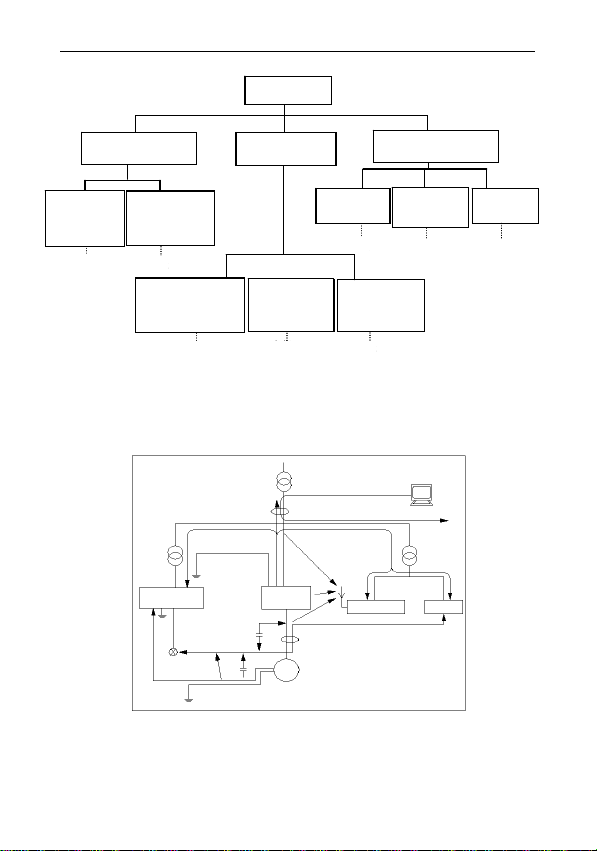
4.1.4 Run mode
EN630/EN650A inverter have 6 kinds of run mode, following is in turn
according
to their priority, jog run →closed-loop run →PLC run →multi-section speed
run→swing frequency run →common run. Shown as Fig.4-1.
electrification
Any jog command?
N
Run command effective?
Closed-loop effective
PLC effective?
Multi-section terminal effective?
Traverse run?
Common run?
waiting
state
N
Y
N
N
N
N
N
Y
Y
?
Y
Y
Closed-loop invalidation
terminal closed
Y
Y
Y
Y
PLC invalidation
terminal closed
N
?
N
?
high priorit
low priority
Fig.4-1 logic flow chart of EN630/EN650A inverter running state
0:Jog run
Upon receiving jog run command (for instance, press the key on keypad)
during waiting state, the inverter run at jog frequency (see function code
F01.25~F01.29).
1:Closed-loop run
28
Jog run
close
run
PLC run
Multi-section
traverse
run
common
run
-loop
run

4 Run and operation explanation for inverter
The inverter will come into closed-loop run mode when closed –loop run
control effective parameter is set (F11.00=1 or F12.00=5). Namely carry on PID
adjustment to specified value and feedback value (proportion integral differential
calculation, see F11 group function code) and PID adjuster output is inverter output
frequency. Can make closed-loop run mode ineffective and switch to lower level
run mode by multi-function terminal (function 31).
2:PLC run
The inverter will enter into PLC run mode and run according to run mode
preset(see F10 group function code description) through setting PLC function
effective parameter(F10.00 last bit≠0). Can make PLC run mode ineffective and
switch to lower level run mode by multi-function terminal (function 36).
3:multi-section speed run
By nonzero combination of multi-function terminal (5, 6, 7, 8, function),
choose multi-section frequency 1~15(F10.31~F10.45) to run at multi-section
speed.
4:swing frequency run
The inverter will enter into swing frequency run mode when swing frequency
function effective parameter (F13.00=1) is set. Set relevant swing frequency run
special parameter according to textile swing frequency craft to realize swing
frequency run.
5:common run
Common open loop run mode of general inverter.
In above 6 kinds of run mode except “jog run” the inverter can run according
to kinds of frequency setting method.
29

4 Run and operation explanation for inverter
y
4.2 Operation and use of key board
4.2.1 Keypad layout
The operating keyboard is the main unit of frequency inverter to accept
commands, display parameters. Keyboard outline diagram shown in Figure 4-2.
Failure alarm indicator light
Mode indicator light
Digital display (LED)
UP
Program/exit key
Multi-function key
Rev/Jog key
Fig.4-2 keypad layout sketch
4.2.2 Keypad function description
There are 8 key-presses and a digital potentiometer on inverter keypad,and
function definition of each key is as shown in table 4-1.
Table 4-1 keypad function table
Key Name Function description
Program/Exit
Shift/Supervisi
on key
Function/Data
Rev/Jog key
Run key Enter into forward run under keypad mode
Enter into or exit programming state
key
Can choose modification digit of set data under editor state;
can switch display status supervision parameter under other state
Enter into or exit programming state
key
Under keypad mode: to press this key can set reverse run or Jog run
according to the 1
st
bit of parameter F00.15
Forward run indicator light
Reverse run indicator light
Current unit(A)
Voltage unit (V)
Frequency unit(Hz)
Digital potentiometer
Confirm/Date ke
Decrease key
Stop/reset key
Forward run key
30

4 Run and operation explanation for inverter
Stop/reset key
Digital
potentiometer
Increasing
button
Decreasing
button
In common run status the inverter will be stopped according to set mode
after pressing this key if run command channel is set as keypad stop
effective mode. The inverter will be reset and resume normal stop status
after pressing this key when the inverter is in malfunction status.
It is the same as the function of increase and decrease key, rotate to
the left means decrease, rotate to the right means increase.
To increase data or function code (to press it continuously can
improve increasing speed)
To decrease data or function code (to press it continuously can
improve decreasing speed)
4.2.3 LED and indicator light
4 status indicator light: they are MOD(mode):ALM(alarm):FWD(forward
run): REV(reverse run)from left to right on the LED: their respective indicating
meaning is as shown in table 4-2.
Table 4-2 status indicator light description
Item Function description
Display current run status parameter and set parameter
A、
Unit for relevant current digital displayed physical parameter(for
Hz、V
current is A:for voltage is V:for frequency is Hz)
This indicator light is lit in non-supervision status and extinguished
MOD
if no key pressed for a minute: then come back to supervision status
Alarm indicator light: indicate that the inverter is in over current or
ALM
over voltage suppressing status or failure alarm status currently
Forward run indicator light, indicate
that the inverter output forward phase
FWD
order and the connected motor rotate
Reverse run indicator light: indicate
that the inverter output reverse phase
REV
order and the connected motor rotate
in reverse direction
The inverter work in DC
brake status if FWD,REV
indicator light is lit at the
same time
Display
function
Digital display
Status
indicat
or light
4.2.4 Key board display status
EN630/EN650A keypad display status is classified as Waiting status parameter
display; Function code parameter editing status display; Malfunction alarm status
display; Run status parameter display; Alarm state display in total 5 kinds of status.
LED indicator light will all be lit after the inverter electrified. Then enter into set
frequency display. As shown in Fig.4-3 a.
31

4 Run and operation explanation for inverter
(1) Waiting parameter display status
The inverter is in waiting status and waiting status supervision parameter is
displayed on keyboard: normally parameter F00.13 decide which status supervision
parameter to be displayed. As shown in Fig.4-3 b, the indicator light shows the unit of
the parameter.
To press key, it can display different waiting status supervision
parameter circularly: for detail please see C-00 to C-05 group supervision
parameter details decide by F00.07~F00.12.
(2) Run parameter display status
The inverter enters into run status when receiving effective run command and
normally parameter F00.13 decide which status supervision parameter to be displayed
on the keypad. As show n in Fig.4-3 c, the indicator light shows the unit of the
parameter.
To press key can display run status supervision parameter circularly.
For detail please see C-00 To C-05 group supervision parameter details decide by
F00.01~F00.06 .
Set frequency
Output frequency
Fig.a Electrification,
display 8.8.8.8.8.
Fig.4-3 inverter electrification: waiting: run status display
Fig.b waiting status, display
waiting status parameter
Fig.c run status: display run
status parameter
(3) Failure alarm display status
The inverter enters into failure alarm display
status upon detecting failure signal and display
failure code sparklingly(as shown in Fig.4-4);
To press key can look over relative
parameter after stopping running;
Can press key to enter into program status
32
over current in accelerating
Fig.4-4

4 Run and operation explanation for inverter
to see about F26 group parameter if want to search failure information.
Can carry on failure restoration by key: control terminal or
communication command on the keypad after troubleshooting. Keep displaying
failure code if failure exist continuously.
For some serious failure, such as inverse module protect, over
current: over voltage etc.: must not carry on failure reset for cibly
!
to make the inverter run again without failure elimination
confirmed. Otherwise have danger of damaging the inverter!
(4) Function code editing status
Under waiting, run or failure alarm status, press key, can enter into
editing status(If user password is set, can enter into editing status after inputting the
password, see also F27.00 description and Fig.4-10),and editing status is
displayed according to three classes menu mode, as shown in Fig. 4-5. To press
key can enter into one class by one class. Under function parameter display
status, press key to carry on parameter storage operation; press key can
only come back to
electrificati
upper class menu without storing modified parameter.
ESC/MENU
First class menu
ENTER/DATA
Second-class menu
Output frequency
Waiting status parameter Display
or run status parameter display
or failure alarm display
Switch display
ESC/MENU
ESC/MENU
Fig.4-5 keypad display status switching
Para. group Display control
(5) Alarm state display
When under running and standby situation:
It means enter failure alarm display status upon
detecting failure signal and display failure
code sparklingly (Fig4-6)Inverter keeping
running state But this alarm display can not
be reset button eliminated: After only find
the cause of the alarm: in order to eliminate
this factor Normal.
Same main/assist frequency channel
Fig.4-6
33

4 Run and operation explanation for inverter
r
4.2.5 User Management Parameters
In order to facilitate the user parameter management: EN630/EN650A
component model parameter menu for display management. The parameters do not
need to be displayed can be shielded.
⑴ Method parameter setting mode display.
By setting F00.00 = 0,1,2,3 respectively parameter mode is set: Basic menu
mode: menu mode Intermediate: Advanced menu mode and user menu mode.
Basic menu F00,F01,F02,F03,F26
Middle menu
Advance
menu
User custom F00.00 and F25 parameters group
F00,F01,F02,F03,F04,F05,F06,F07,F08,F09,F10,F11,F12,F13,F14,
F15,F16,F18,F19,F26
F00,F01,F02,F03,F04,F05,F06,F07,F08,F09,F10,F11,F12,F13,F14,
F15,F16,F17,F18,F19,F20,F21,F22,F23,F24,F25,F26,F27
4.2.6 Method for operating keypad
Can carry on various operation to the inverter through keypad, for example:
(1) Status parameter display switching:
After pressing key ,display C group status supervision parameter; after
displaying one supervision parameter code for 1 second will display this parameter
value automatically. Press key will go back to supervision interface.
LED displayed
content
Key-press operation
orde
C-00
0.00 C-01
1s
Para.
1s
Para. C-02
1s
Para. C-05
∫…∫
Fig.4-7 waiting status parameter display operating example
(2) Function code parameter setting
Take function code F01.01 modified from 5.00Hz to 6.00Hz as
example.Boldface in Fig.4-8 shows flickering digit.
34
Para.
1s
C-03

4 Run and operation explanation for inverter
LED displayed
content
Key-press
operation
order
0.00
Exit editing
status
F00.00 F01.00
Enter into
editing Status
display first-class
menu
Choose
F01 group
function code
F01.02
Store modified
value: back to
first -class menu
Display next
Fig.4-8 example for parameter setting and modification
function code
Parameter
modification,
5→6
006.00
F01.00
Move to the
position to be
adjusted
005.00
Parameter
modification,
Choose parameter
digit
…
F01.01
Choose
function
code F01.01
005.00
Function code
confirmation,
Enter into
second-class
Description: under second -class menu: if the parameter has no blinking digit,
this function code can’t be modified, possible reasons are as follows:
1>This function code shouldn’t be modified: for example actual
status
parameter: run record parameter etc.;
detected
2>This function code can’t be modified under run status and can be changed
after stopping running;
3>Parameter protected. All the function code can’t be modified when function
code F00.14=1 or 2,in order to avoid wrong operation. Need to set the function
code F00.14 to 0 if you want to edit function code parameter.
(3) Specified frequency adjustment for common run
Take example modifying specified frequency from 50.00Hz to 40.00Hz at
F01.06=1,F01.03=0 during running for explanation.
LED displayed
content
Key-press
operation order
50.00
49.99
Press decreasing
button for one
time
Fig.4-9 set frequency adjustment operation example
45.00 40.00
…
Adjust frequency
based on
requirement
Stop pressing after set
value reached: go back
to normal display status
after 1s
(4) Jog run operation
For example: keypad as current run command channel: jog run frequency 5Hz:
waiting status.
35

4 Run and operation explanation for inverter
p
d
LED
displayed
Key-press
operation
order
0.00
waiting
Display
set frequency
ress
0.01
keep
Display run
output
…
5.00 0.00
Output frequency
Increased by 5Hz
Fig.4-10 Jog run operating example
(5) Operation for entering to function code editing status after setting user
password
For example :“User password” F27 is set to“12345”. Boldfaced digit in
Fig.4-11 shows blinking bit.
LED displayed
content
Key-press
operation order
0.00
None-editing
status
Move to
the unit
Increase to“5”
user password
effective: go into
password validation
status
Increase to“4”
12345
00000
10000
At first last
Digit flash,
Increase to“1”
Move to
secon
Press confirmation
Key: pass validation,
Go into editing status
F27.00
12300 12000 12340 12340 12300
Increase
to“3”
Fig.4-11 inputting password to go into function code operation
(6) See about failure parameter under failure status:
If press key under failure status the user can quickly locate to the F26
group function code parameter. Press can quickly switch value between
F26.06 ~ F26.10 parameters and fault alarm, easy to view the fault records.
(7) Keypad key-press locking operation
Under unlocked keypad situation , press key for 2s to lock the keypad.
For detailed operation please refer to 2
nd
bit of F00.14 function code.
(8) Keypad key-press unlocking operation
Under locked keypad situation, press key for 5s to unlock the keypad.
36
0.01
release
Output frequency
Fall down to 0Hz
Stop running
10000 12000
move cursor
position to
forth digit
Move to third
Increase
to“2”
waiting

4 Run and operation explanation for inverter
4.3 Inverter electrification
4.3.1 Check before electrification
Please carry on wiring based on operation requirement provided in “inverter
wiring” of this Service manual.
4.3.2 First electrification
Close input side AC power supply switch after correct wiring and power
supply confirmed: electrify the inverter and keypad LED display “8.8.8.8.8”,
contactor closed normally: LED displayed set frequency shows that
electrification is finished. First electrification operation process is shown as
Fig.4-12:
N
N
Fig.4-12 first electrification operation flow
start
wiring based on 3.5 section
wiring correct?
Y
input voltage
correct?
Y
electrify
Y
Display 8.8.8.8.8.?
Y
Hear contactor closed sound?
Y
Display 0.00Hz?
Y
success
N
N
N
Failure
Cut off power
check reason
37

5 Function parameter schedule graph
5 Function Parameter Schedule Graph
5.1 Symbol description
× ---- parameter can’t be changed in process of running
○ ---- parameter can be changed in process of running
* ---- read-only parameter, unchangeable
5.2 Function parameter schedule graph
F00-System Parameter Group
Function
code
F00.00 Parameter group display
F00.01 C-00 display parameter
38
Name Set range
control
selection when operation
0:Basic list mode(only displayF00~F03 basic control
parameter group and F26 fault record parameter group.)
1:Middle list mode. Display all parameter except for
extension: virtual and reserve parameter group.
2: Senior list mode. All parameter display.
3:User list mode. Display parameter defined by user: and
monitor parameter: F00.00 display all the time.
0:main setup frequency(0.01Hz)
1:auxiliary setup frequency(0.01Hz)
2:setup frequency(0.01Hz)
3:output frequency(0.01Hz)
4:output current(0.1A)
5:output voltage(1V)
6:DC bus voltage(0.1V)
7:motor speed(1 circle/min)
8:motor line velocity(1 circle/min)
9:inverter temperature(1 )
10: latest working time (0.1min)
11:current accumulate working time(1h)
12:current accumulate power-on time(1h)
13:inverter status
14:input terminal status
15:output terminal status
16: reserve
17: reserve
18:communication virtual input terminal status
19:internal virtual input node status
20:analog input AI1(before checkout)
(0.01V / 0.01mA)
21:analog input AI2(before checkout)
(0.01V / 0.01mA)
22:reserve
23:reserve
24:analog AO output(checked) (0.01V /0.01mA)
25:reserve
26:reserve
27:reserve
28:external pulse input frequency (before checkout) (1Hz)
29:reserve
30:process PID provide(0.01V)
31:process PID feedback(0.01V)
32:process PID deviation(0.01V)
℃
Min.
Factory
unit
default
1 0 ○
1 3 ○
Modifi
-cation

5 Function parameter schedule graph
33:process PID output(0.01Hz)
34:simple PLC current segment No.
35:external multi-speed current segment No.
36:constant pressure water supply provide
pressure(0.001Mpa)
37:constant pressure water supply feedback
pressure(0.001Mpa)
38:constant pressure water supply relay status
39:current length(1M)
40:accumulate length(1M)
41:current internal count value
42:current internal time value
43:run command setup channel(0:keyboard 1:terminal
2:communication)
44:main frequency provide channel
45:auxiliary frequency provide channel
46:rated current(0.1A)
47:rated voltage(1V)
48:rated power(0.1KW)
49:electric torque limit value(0.1% motor specified torque)
50:braking torque limit value(0.1% motor specified torque)
51:frequency after add or subtract speed (0.01Hz)
52:motor rotor frequency(0.01Hz)
53:current present torque(relate specified percent of torque,
with direction)
54:current output torque(relate specified percent of torque,
with direction)
55:torque current at present(0.1A)
56:flux current at present(0.1A)
57:setting motor speed(r/min)
58:output power(act power) (0.1kw)
59:total electric cost low-order(1 degree)
60:total electric cost high-order(1 means 10,000degree)
F00.02 C-01 display parameter
selection when operation
F00.03 C-02 display parameter
selection when operation
F00.03 C-03 display parameter
selection when operation
F00.05 C-04 display parameter
selection when operation
F00.06 C-05 display parameter
selection when operation
F00.07 C-00 display parameter
selection when stop
F00.08 C-01 display parameter
selection when stop
F00.09 C-02 display parameter
selection when stop
F00.10 C-03 display parameter
selection when stop
F00.11 C-04 display parameter
selection when stop
F00.12 C-05 display parameter
selection when stop
61-65:reserve
Same as above 1 2 ○
Same as above 1 4 ○
Same as above 1 5 ○
Same as above 1 6 ○
Same as above 1 9 ○
Same as above 1 2 ○
Same as above 1 6 ○
Same as above 1 48 ○
Same as above 1 14 ○
Same as above 1 20 ○
Same as above 1 9 ○
39

5 Function parameter schedule graph
F00.13 Power-on fault monitor
parameter selection
F00.14 Parameter operation
control
F00.15 Button function selection
F00.16 Multi-function key run
command channel
switching order selection
F00.17 Motor speed display
coefficient
F00.18 Line speed display
coefficient
F00.19 PG card valid selection 0:invalid
0~5 1 0 ○
LED units digit: Parameter modification operations
0:All parameters are allowed to be modified
1:Except current parameter, all other parameters are not
allowed to modify
2:ExceptF01.01,F01.04and current parameter , all other
parameters are not allowed to be modified
LED tens digit: Reset to factory defaults
0:No action.
1:All parameters return to default.(not include fault record
parameter group(F26 group) parameter).
2:Except for motor parameter: all parameters return to
default.(not include F15 and F26 group parameter).
3:Extension parameter return to default.(only F21~F24 group
parameter return to default).
4:Virtual parameter return to default.(only F20 group
parameter return to default).
5:Fault record return to default.(only fault
record parameter group(F26 group)
parameter return to default)
LED hundreds digit: key operation
0:All locked
1:Except button: the others locked
2:Except , , button: the others locked
3:Except , button: the others locked.
4:Except , button: the others locked.
LED units digit: panel button selection
0:Reversal command action button
1:Jog action button
LED tens digit: Reserve
LED hundreds digit: terminal run command control
0:Keyboard button invalid
1:Keyboard button valid
LED thousands digit: communication run command control
0:Keyboard button invalid
1:Keyboard button valid
0: Keyboard control→ terminal
control→ communication control
1: Keyboard control←→terminal control
2: Keyboard control←→communication
control
3: Terminal control←→communication
control
0.1~999.9% 0.1% 100.0% ○
0.1~999.9% 0.1% 1.0% ○
1:reserve
2:reserve
3:incremental PG coder card(F08.24 can’t be 91) (terminal
X6, X7 correspond A, B; terminal X5 correspond Z)
40
1 000 ×
1 0001 ○
1 0 ○
1 0 ×

5 Function parameter schedule graph
F00.20 Analog input
terminal configuration
F00.21 Analog output
terminal configuration
F00.22 Y output
terminal
configuration
F00.23 Reserved 1 0 ×
F00.24 Motor control mode 0:V/F control
F00.25 Monitor parameter 2
selection
F00.26 Bus bar voltage adjust
coefficient
F00.27 Parameters copy LED units digit: reserved
4~10: reserved
LED units digit:AI1 configuration
0:0~10V input
1:4~20mA input
LED tens digit: AI2 configuration
0:-10~10V input
1:4~20mA input
LED hundreds digit: reserve
LED thousands digit: reserve
LED units digit: AO configuration
0:0~10V output
1:4~20mA output
LED tens digit: reserve
LED hundreds digit: reserve
LED thousands digit: reserve
LED units digit~ LED hundreds
digit: reserved
LED thousands digit: Y2 output configuration
0:Open collector output
1:DO output
1: No Speed Vector Control 1( compare to control 2, it more
suit 160kw or less asynchronous motor control, support speed
and torque control)
2: Speed sensors vector control( support asynchronous motor
speed and vector control)
3: No Speed sensors vector control 2( only support
asynchronous speed control, more suit 185kw or bigger
motor.
Same to F00.01 parameter
0.900~1.100
LED tens digit: update parameter or download (digital
potentiometer keyboard valid)
0: no action
1: update
2: download 1 (no motor parameter)
3: download 2 (include motor parameter
1 0000 ×
1 0000 ×
1 0000 ×
1 0 ×
F01-Basic Run Function Parameter Group
Function
code
F01.00 Main frequency input
Name Set range
channel selection
0: Operation keyboard digital setup
1: AI1 analog setup
2: AI2 analog setup
3:Terminal UP/DOWN adjusting setup
4:Communication provide. (add: 1E01)
5:reserve
6:reserve
7:High speed pulse setup X7 terminal need choose the suitable
function)
8~14: Reserved
Min.
Factory
unit
default
1 0 ○
Modifi
-cation
41

5 Function parameter schedule graph
F01.01 Main frequency digital
setup
F01.02 Main frequency digital
control
F01.03 Auxiliary frequency
input channel select
F01.04 Auxiliary frequency
digital setup
F01.05 Auxiliary frequency
digital
F01.06 Main and auxiliary
provide calculating
setup
F01.07 Auxiliary frequency
provide coefficient
F01.08 Coefficient after 0.00~10.00 0.01 1.00 ○
0.00Hz~upper limit frequency 0.01Hz 50.00Hz ○
Only when parameter F01.00=0, 3, 4 valid.
LED units digit: power down reserve setup
0:Main frequency power down reserve.
1:Main frequency power down no reserve.
LED tens digit: halt reserve setup
0:Halt main frequency hold
1:Halt main frequency recovery F01.01
LED hundreds digit: communication provide frequency data
setup
0:definit frequency setup( provide 5,000 means 50.00 Hz)
1:provide 10,000 means upper limit frequency (F01.11)
0: Operation keyboard digital setup
1: AI1 analog setup
2: AI2 analog setup
3:Terminal UP/DOWN adjusting setup
4:Communication provide.
5:reserve.
6:reserve
7:Terminal pulse setup(X7 terminal need choose the suitable
function)
8~10:reserved
11: process PID provide
12~20: Reserved
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ○
LED units digit: power down reserve setup
0:Auxiliary frequency power down reserve.
1:Auxiliary frequency power down no
reserve.
LED tens digit: halt reserve setup
0:Halt auxiliary frequency hold.
1:Halt auxiliary frequency recovery
parameter F01.04
0:Main frequency (complex frequency of current is main
frequency).
1: Auxiliary frequency(complex frequency of current is
auxiliary frequency.)
2: Plus(polarity oppose of complex and main frequency,
complex frequency is zero).
3:Minus(polarity oppose of complex and auxiliary frequency,
complex frequency is zero).
4:Multiplication(polarity opposed of main and auxiliary
frequency: complex frequency is zero).
5:Max(the max frequency of main and auxiliary absolute
value).
6:Min(the min frequency of main and auxiliary absolute
value).
7:Selection no-zero value(auxiliary is not negative,main
frequency prior;auxiliary is negative,complex frequency is
zero).
8:Main frequency*2/F01.11(polarity opposed of main
frequency: complex frequency is zero)
0.00~10.00 0.01 1.00 ○
1 11 ○
1 1 ○
1 11 ○
1 0 ○
42

5 Function parameter schedule graph
complex of main and
auxiliary frequency
F01.09 Auxiliary frequency
range selection
F01.10 Auxiliary frequency
source scope
F01.11 upper limit frequency low limit frequency~600.00Hz 0.01Hz 50.00Hz ×
F01.12
Low limit frequency
F01.13 Low limit frequency run
mode
F01.14 Sleep run hysteresis
frequency
F01.15 Run command channel
selection
F01.16 Run direction setup L ED units digit: Keyboard command for/rev setup(only valid
F01.17 Acceleration time 1 1~60000(Acceleration time is interval accelerate from zero
F01.18 Deceleration time 1 1~60000(deceleration time is the interval decelerate from
F01.19 Acc/dece time unit 0:0.01s
F01.20 Acc/dece mode
selection
F01.21 S curve acceleration
initiation segment time
F01.22 S curve acceleration up
segment time
F01.23 S curve deceleration 10.0%~50.0% 0.1% 20.0% ○
0:Relative upper limit frequency.
1:Relative main frequency.
0.00~1.00 0.01 1.00 ○
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
0:As low limit frequency run.
1:As setting frequency run.
2:As zero frequency run.
3:Sleep: PWM clocked at sleep mode.
0.01Hz~upper limit frequency
(This function can be used to finish the sleep mode function,
realizing energy-saving operation process, and the hysteresis
width can avoid inverter starting frequently in threshold)
0:Operation keyboard run control.
1:Terminal run command control
2:Communication run command control.
to keyboard inching command)
0:reserved
1:Reverse
LED tens digit: for/rev forbid(suitable for all command
channel,not include inching function)
0:For/rev available.
1:Reverse not available( imposing on reverse,stop as the halt
mode).
2:Forward not available( imposing on
forward,stop as the halt mode)
LED hundreds digit: reverse is ok(only suitable for keyboard
and communication channel)
0:invalid
1:valid
LED thousands digit: terminal multi-speed add or minus speed
control
0: respectively correspond 1 to 15
1:confirm by F01.17&01.18
frequency to upper limit frequency)
upper limit frequency to zero frequency.)
1:0.1s
2:1s
0:Line acc/dece mode.
1:S curve acc/dece mode.
10.0%~50.0%
(Acceleration/deceleration time)
S curve acceleration start time+ S curve acceleration raise
time ≤90% )
10.0%~70.0%
(Acceleration/deceleration time)
S curve acceleration start time+ S curve acceleration raise
time ≤90% )
1 0 ○
1 0 ×
0.01Hz 0.01Hz ○
1 0 ○
1 00 ○
Base on
1
motor type
Base on
1
motor type
1 1 ×
1 0 ×
0.1% 20.0% ○
0.1% 60.0% ○
○
○
43

5 Function parameter schedule graph
initiation segment time (Acceleration/deceleration time)
F01.24 S curve deceleration up
segment time
F01.25 Keyboard jog run
frequency
F01.26 Terminal jog run
frequency
F01.27 Terminal jog run
frequency
F01.28 Jog acce leration time 0.1~6000.0s 0.1s 20.0s ○
F01.29 Jog deceleration time 0.1~6000.0s 0.1s 20.0s ○
S curve deceleration start time+ S curve deceleration raise
time ≤90% )
10.0%~70.0%
(Acceleration/deceleration time)
S curve deceleration start time+ S curve deceleration raise
time ≤90% )
0.00Hz~upper limit frequency 0.01Hz 5.00Hz ○
0.00Hz~upper limit frequency
0.0~100.0s 0.1s 0.0s ○
0.1% 60.0% ○
0.01Hz 5.00Hz ○
F02-Start, stop, forward/reverse, brake function parameter group
Function
code
F02.00 Start running mode 0: Start from starting frequency
F02.01 Starting delay time 0.0~60.0s 0.1s 0.0s ×
F02.02 Starting frequency 0.0~10.00Hz 0.01Hz 0.00Hz ×
F02.03 Starting f requency duration 0.0~60.0s 0.1s 0.0s ×
F02.04 Starting braking current when
F02.05 Starting braking time when
F02.06
F02.07 Speed track auxiliary starting
F02.08 Speed track starting waiting
F02.09 Speed track current control
F02.10 Speed track searching speed
F02.11 Stop mode 0: Deceleration stop.
F02.12 Deceleration stop holding
F02.13 Deceleration stop holding
F02.14 Stop DC braking starting
F02.15 stop DC braking waiting time 0.00~30.00s 0.01s 0.00s ×
F02.16 Stop DC braking current 0.0~100.0%(G type inverter rated current) 0.1% 0.0% ×
F02.17 Stop DC braking time 0.0~30.0s 0.1s 0.0s ×
F02.18 Stop auxiliary braking current 0.0~100.0%(G type inverter rated current) 0.1% 0.0% ×
F02.19 Stop auxiliary braking time 0.0~100.0s 0.1s 0.0s ×
F02.20 Forward/reverse dead zone 0.0~3600.0s 0.1s 0.1s ×
Name Set range
1: First brake: and then start from starting frequency
2: Start by revolving speed tracking
starting
starting
Speed track starting frequency
selection
frequency
time
coefficient
time
frequency
time
frequency
0.0~100.0%( rated current) 0.1% 30.0% ×
0.0~30.0s 0.1s 0.0s ×
0: Current setting frequency.
1: Running frequency before power down.
2:Speed track auxiliary starting frequency.
0.00Hz~upper limit frequency 0.01Hz 10.00Hz ×
0.00~10.00s 0.01s 0.10s ×
1~20
0.1~30.0s
1: Free stop
2: Deceleration + DC braking stop.
0.00Hz ~ upper limit frequency(This parameter is only
valid for stop mode 0.)
0.00~10.00s 0.01s 0.00s ×
0.00~15.00Hz
Min.
Factory
default
Modifi
cation
unit
1 0 ×
1 2 ×
1 2 ×
0.1s 10.0s ×
1 0 ×
0.01Hz 0.00Hz ×
0.01Hz 0.00Hz ×
44

5 Function parameter schedule graph
time
F02.21 Forward/Reverse switching
mode
F02.22 Energy consumption braking
selection
F02.23 Energy consumption braking
voltage
F02.24 Energy consumption braking
use rate
F02.25 Encryption time 0~65535h(when F02.25 data bigger that 1, means valid.
F02.26 Over adjusting coefficient 95%~115%(only F00.24 valid) 1% 100% ○
0: Over zero switchover
1: Over starting frequency switchover
0:No energy consumption braking
1:Energy consumption braking 1 ( no braking if stop
working).
2: Energy consumption braking 2 (can braking if stop
working).
100.0 ~ 145.0%(rated bus bar voltage )
0.0~100.0%
VFD power up time(F05.38) longer than F02.25 setup
time, stop working according to decelerate speed way,
then keyboard show A-53, can only rework after
decode)
1 0 ×
Base on
1
motor type
0.1% 125.0%
0.1% 50.0%
1 0 ○
F03-V/F control parameter group
Function
code
F03.00 V/F curve setting 0:Constant torque curve
F03.01 Torque boost mode 0:Manual boost.
F03.02 Torque boost 0.0~12.0% 0.1% Base on
F03.03 Torque boost cut-off
F03.04 V/F frequency value 0 0.00 ~ V/F frequency value 1 0.01Hz 10.00Hz ×
F03.05 V/F voltage value 0 0.00 ~ V/F voltage value 1 0.01% 20.00% ×
F03.06 V/F frequency value 1 V/F frequency value 0 ~ V/F frequency value 2 0.01Hz 20.00Hz ×
F03.07 V/F voltage value 1 V/F voltage value 0 ~ V/F voltage value 2 0.01% 40.00% ×
F03.08 V/F frequency value 2 V/F frequency value 1 ~ V/F frequency value 3 0.01Hz 25.00Hz ×
F03.09 V/F voltage value 2 V/F voltage value 1 ~ V/F voltage value 3 0.01% 50.00% ×
F03.10 V/F frequency value 3 V/F frequency value 2 ~ upper limit frequency 0.01Hz 40.00Hz ×
F03.11 V/F voltage value 3 V/F voltage value 2 ~ 100.00%
F03.12 V/F oscillation suppression
Name Set range
1:Degression torque curve 1 (2.0 power)
2:Degression torque curve 1 (1.7 power)
3:Degression torque curve 3 (1.2 power)
4: User self-defined setting V/F curve (Confirmed by
F03.04~F03.11)
5: V/F separation control(voltage channel confirm by
F18.22)
1:Auto torque boost
frequency
factor
0.0~100.0%(motor rated frequency ) 0.1% 20.0% ○
(motor rated voltage)
0~255 1 10 ○
Min.
Factory
unit
default
1
0
1 0 ○
motor type
0.01% 80.00% ×
F04-Auxiliary running parameter group
Function
code
F04.00 Jump freq. 1 0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
F04.01 Jump freq. 1 range 0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
Name Set range
Min.
unit
Factory
default
Modifi
-cation
○
○
○
Modifi
-cation
×
○
45

5 Function parameter schedule graph
F04.02 Jump freq. 2 0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
F04.03 Jump freq. 2 range 0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
F04.04 Jump freq. 3 0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
F04.05 Jump freq. 3 range 0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
F04.06 Slip freq. gain 0.0~300.0% 0.1% 0.0% ×
F04.07 Slip compensation limit 0.0~250.0% 0.1% 100.0% ×
Slip compensation time
F04.08
constant
F04.09 Carrier freq. 0.5~16.0K 0.1K Base on
F04.10 PWM optimized adjustment LED units digit: Carrier freq. is adjusted
F04.11 AVR function 0: No action
F04.12 Reserved
F04.13 Auto energy-saving operation 0: No action
F04.14 Acceleration time 2 and 1
switchover frequency
F04.15 Deceleration time 2 and 1
switchover frequency
F04.16 Acceleration time 2 1~60000 1 200 ○
F04.17 Deceleration time 2 1~60000 1 200 ○
F04.18 Acceleration time 3 1~60000 1 200 ○
F04.19 Deceleration time 3 1~60000 1 200 ○
F04.20 Acceleration time 4 1~60000 1 200 ○
F04.21 Deceleration time 4 1~60000 1 200 ○
F04.22 Acceleration time 5 1~60000 1 200 ○
F04.23 Deceleration time 5 1~60000 1 200 ○
F04.24 Acceleration time 6 1~60000 1 200 ○
F04.25 Acceleration time 6 1~60000 1 200 ○
F04.26 Acceleration time 7 1~60000 1 200 ○
F04.27 Deceleration time 7 1~60000 1 200 ○
F04.28 Acceleration time 8 1~60000 1 200 ○
F04.29 Deceleration time 8 1~60000 1 200 ○
F04.30 Acceleration time 9 1~60000 1 200 ○
F04.31 Deceleration time 9 1~60000 1 200 ○
F04.32 Acceleration time 10 1~60000 1 200 ○
F04.33 Deceleration time 10 1~60000 1 200 ○
F04.34 Acceleration time 11 1~60000 1 200 ○
F04.35 Deceleration time 11 1~60000 1 200 ○
F04.36 Acceleration time 12 1~60000 1 200 ○
0.1~25.0s
automatically according to temperature
0: Banned.
1: Allowed.
LED tens digit: low speed carrier freq. limit mode
0: No limit.
1: Limit.
LED hundreds digit: carrier wave modulation system
0: 3 phase modulation.
1: 2 phase and 3 phase modulation.
LED thousands digit: Asynchronous modulation:
synchronization mode (valid under V/F control)
0:Asynchronous modulation.
1:Synchronous modulation (under 85Hz:
Asynchronous modulation).
1: Action all the time
2: No action only during deceleration
1: Action
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
0.1s 2.0s ×
motor type
1 0110 ×
1 0 ×
1 0 ×
46
○

5 Function parameter schedule graph
F04.37 Deceleration time 12 1~60000 1 200 ○
F04.38 Acceleration time 13 1~60000 1 200 ○
F04.39 Deceleration time 13 1~60000 1 200 ○
F04.40 Acceleration time 14 1~60000 1 200 ○
F04.41 Deceleration time 14 1~60000 1 200 ○
F04.42 Acceleration time 15 1~60000 1 200 ○
F04.43 Deceleration time 15 1~60000 1 200 ○
F05-Terminal correlative function parameter group
Function
code
F05.00 protocol selection 0: Modbus protocol .
F05.01 Baud rate configuration LED units digit: Free protocol and Modbus Baud rate
F05.02 Data format LED units digit: Free protocol and Modbus protocol
Name Set range
1: Reserved.
2: Reserved.
3: Reserved.
4: Reserved.
5: Free protocol 1(can modify all the EN630 function
parameter)
6: Free protocol 2(only can modify part of the EN630
function parameter)
selection
0:300BPS
1:600BPS
2:1200BPS
3:2400BPS
4:4800BPS
5:9600BPS
6:19200BPS
7:38400BPS
8:57600BPS
9: 115200BPS
LED tens digit: Reserved
LED hundreds digit: reserved
data format
0:1-8-1 format: no parity: RTU.
1:1-8-1 format: even parity: RTU.
2:1-8-1 format: odd parity: RTU.
3:1-7-1 format: no parity: ASCII.
4:1-7-1 format: even parity: ASCII.
5:1-7-1 format: odd parity: ASCII.
LED tens digit: reserve
LED hundreds digit: Modbus & Free protocol act
selection
0: response main engine order, and feedback
1: response main engine order, no feedback( feedback
when write parameter)
2: response main engine order, no feedback( no
feedback when write parameter)
LED thousands digit: (communication setup internal
storage reserve setup)
0: no save
1: save
Min.
Factory
default
Modifi
-cation
unit
1 0 ×
1 005 ×
000 ×
47

5 Function parameter schedule graph
F05.03 Local address 0~247,
F05.04 Communication overtime
checkout time
F05.05 Communication error checkout
time
F05.06 Local response delay time 0~200ms(Modbus effective) 1ms 5ms ○
F05.07 Main & sub inverter
communication frequency
setting percentage
F05.08 Communication virtual input
terminal enabled
F05.09 Communication virtual input
terminal joining node
F05.10 Communication virtual terminal
CX1 function
F05.11 Communication virtual terminal
CX2 function
F05.12 Communication virtual terminal
CX3 function
F05.13 Communication virtual terminal
CX4 function
F05.14 Communication virtual terminal
CX5 function
F05.15 Communication virtual terminal
CX6 function
F05.16 Communication virtual terminal
CX7 function
F05.17 Communication virtual terminal
CX8 function
F05.18 Input mapping F00.00~F26.xx 0.01 25.00 ○
Modbus protocol 0 is broadcast address. Broadcast
address can only receive and execute upper computer
broadcast command, cannot respond to upper
computer. The address is 0 when turn to free protocol
0.0~1000.0s 0.1s 0.0s ○
0.0~1000.0s 0.1s 0.0s ○
0~500% 1% 100% ○
00 ~ FFH
Bit0: CX1 virtual input terminal enabled
0:forbidden
1:enabled
Bit1: CX2 virtual input terminal enabled
0:forbidden
1:enabled
Bit2: CX3 virtual input terminal enabled
0:forbidden
1:enabled
Bit3: CX4 virtual input terminal enabled
0:forbidden
1:enabled
Bit4: CX5 virtual input terminal enabled
0:forbidden
1:enabled
Bit5: CX6 virtual input terminal enabled
0:forbidden
1:enabled
Bit6: CX7 virtual input terminal enabled
0:forbidden
1:enabled
Bit7: CX8 virtual input terminal enabled
0:forbidden
1:enabled
0: Independent node.
1: Terminal node.
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
1 1 ×
1 00H ○
1 0 ○
48

5 Function parameter schedule graph
application parameter 1
F05.19 Input mapping
application parameter 2
F05.20 Input mapping
application parameter 3
F05.21 Input mapping
application parameter 4
F05.22 Input mapping
application parameter 5
F05.23 Input mapping
application parameter 6
F05.24 Input mapping
application parameter 7
F05.25 Input mapping
application parameter 8
F05.26 Input mapping
application parameter 9
F05.27 Input mapping
application parameter 10
F05.28 Setup frequency Show current setup frequency
F05.29 Increase& decelerate speed
frequency
F05.30 Synchronous frequency current synchronous frequency
F05.31 Output current Show current output current
F05.32 Output voltage Show current output voltage
F05.33 Bus bar voltage Show current bus bar voltage
F05.34 Loading motor spee d Show current loading motor speed
F05.35 Set torque Show set torque ( negative if upper 37367)
F05.36 Output torque Show output torque (negative if upper 32767)
F05.37 Torque current Show torque current at present
F05.38 Total power up time Show vfd total power up time
F05.39 Total working time Show vfd total working time
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
F00.00~F26.xx 0.01 25.00 ○
Show current increase& decelerate speed frequency
F06-Traverse special function parameter group
Function
code
F06.00 Setting curve selection LED units digit: AI1 curve selection
F06.01 Curve 1 min. setting 0.0%~curve 1 inflexion setting 0.1% 0.0% ○
F06.02 Corresponding physical
F06.03 Curve 1 inflexion setting Curve 1 min. setting ~ curve 1 Max. setting 0.1% 50.0% ○
F06.04 Corresponding physical
Name Set range
0: curve 1.
1: curve 2
2: curve 3
LED tens digit: AI2 curve selection
Same as unit’s digit.
LED hundreds digit: high speed pulse curve selection
Same as unit’s digit.
LED thousands digit: reserved
quantity of curve 1 min.
setting
quantity of curve 1 inflexion
0.0~100.0% 0.1% 0.0% ○
0.0~100.0% 0.1% 50.0% ○
Min.
Factory
unit
default
1 0000 ○
Modifi
-cation
49

5 Function parameter schedule graph
setting
F06.05 Curve 1 Max. setting Curve 1 inflexion setting ~ 100.0%, 100.0%
F06.06 Corresponding physical
quantity of curve 1 Max.
setting
F06.07 Curve 2 min. setting 0.0% ~ curve 2 inflexion setting 0.1% 0.0% ○
F06.08 Corresponding physical
quantity of curve 2 min.
setting
F06.09 Curve 2 inflexion setting Curve 2 min. setting ~ curve 2 Max. setting 0.1% 50.0% ○
F06.10 Corresponding physical
quantity of curve 2 inflexion
setting
F06.11 Curve 2 Max. setting Curve 2 inflexion setting ~ 100.0% 0.1% 100.0% ○
F06.12 Corresponding physical
quantity of curve 2 Max.
setting
F06.13 Curve 3 min. setting 0.0% ~ curve 3 inflexion 1 setting 0.1% 0.0% ○
F06.14 Corresponding physical
quantity of curve 3 min.
setting
F06.15 Curve 3 inflexion 1 setting Curve 3 min. setting ~ curve 3 inflexion 2 setting 0.1% 30.0% ○
F06.16 Corresponding physical
quantity of curve 3 inflexion
1 setting
F06.17 Curve 3 inflexion 2 setting Curve 3 inflexion 1 setting ~ curve 3 Max. setting 0.1% 60.0% ○
F06.18 Corresponding physical
quantity of curve 3 inflexion
2 setting
F06.19 Curve 3 Max. setting Curve 3 inflexion 1 setting ~ 100.0% 0.1% 100.0% ○
F06.20 Corresponding physical
quantity of curve 3 Max.
setting
F06.21 Curve lower than min. input
corresponding selection
corresponding to 5V Input AD terminal
0.0~100.0% 0.1% 100.0% ○
0.0~100.0% 0.1% 0.0% ○
0.0~100.0% 0.1% 50.0% ○
0.0~100.0% 0.1% 100.0% ○
0.0~100.0% 0.1% 0.0% ○
0.0~100.0% 0.1% 30.0% ○
0.0~100.0% 0.1% 60.0% ○
0.0~100.0% 0.1% 100.0% ○
LED units digit: curve 1 setting
0: Corresponds to min. setting
corresponding physical quantity.
1: 0.0% of the corresponding physical
quantity.
LED tens digit: curve 2 setting
Same as units digit.
LED hundreds digit: curve 3 setting
Same as units digit.
LED thousands digit: extended curve 1
Same as units digit.
LED ten thousands digit: extended curve 2
Same as units digit.
0.1% 100.0% ○
1 11111 ○
50

5 Function parameter schedule graph
Function
code
F07.00 AI1 input filter time 0.000~9.999s 0.001s 0.050s ×
F07.01 AI1 setting gain 0.000~9.999 0.001 1.002 ○
F07.02 AI1 setting bias 0.0~100.0% 0.1% 0.5% ○
F07.03 AI2 input filter time 0.000~9.999s 0.001 0.050s ×
F07.04 AI2 setting gain 0.000~9.999 0.001 1.003 ○
F07.05 AI2 setting bias 0.0~100.0% 0.1% 0.1% ○
F07.06 Analog setting bias polarity LED units digit: AI1 setting bias polarity
F07.07 Pulse input filter time 0.000~9.999s 0.001 0.000s ×
F07.08 Pulse input gain 0.000~9.999 0.001 1.000 ○
F07.09 Pulse input Max. frequency 0.01~50.00KHz
F07.10 Reserved
F07.11 Reserved
F07.12 Reserved
F07.13 Reserved
F07.14 Analog input broke line
F07.15 Analog input broke line
F07.16 Analog input broke line
F07.17 Potentiometer torque setup
Name Set range
0: Positive polarity.
1: Negative polarity.
LED tens digit: AI2 setting bias polarity
0: Positive polarity.
1: Negative polarity.
detection threshold
detection time
protection option
coefficient
0.0%~100.0%
0.0~500.0s
LED units digit: broke line detection channel
selection
0: invalid
1: AI1
2: AI2
LED tens digit: broke line protection option
0: Stop as stop way
1: Obstacle, free stop
2: keep work
0.0~100.0%
Min.
Factory
unit
default
1 01 ○
0.1% 10.0%
0.1s 3.0s
1 10
0.1% 50.0%
Modifi
-cation
○
○
○
○
F08-On-off input function parameter group
F07-Analog quantity, Pulse input function parameter group
Function
code
F08.00
F08.01 Input terminal filter time 0.000~1.000s 0.001s 0.000s ○
F08.02
F08.03
F08.04
F08.05
F08.06
Name Set range
Input terminal positive and
negative logic setting
X1 Input terminal closed
time
X1 Input terminal opened
time
X2 Input terminal closed
time
X2 Input terminal opened
time
X3 Input terminal closed
time
0000~FFFF 1 0000 ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
Min.
unit
Factory
default
Modifi
-cation
51

5 Function parameter schedule graph
X3 Input terminal opened
F08.07
time
X4 Input terminal closed
F08.08
time
X4 Input terminal opened
F08.09
time
X5 Input terminal closed
F08.10
time
X5 Input terminal opened
F08.11
time
X6 Input terminal closed
F08.12
time
X6 Input terminal opened
F08.13
time
X7 Input terminal closed
F08.14
time
X7 Input terminal opened
F08.15
time
F08.16 Reserved
F08.17 Reserved
F08.18 Input terminal X1 function
selection
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0.00~99.99s 0.01s 0.00s ○
0:Leave control terminal unused
1: Forward running FWD terminal
2: Reverse running REV terminal
3: External forward jogging control
4: External reverse jogging control
5: Multi-step speed control terminal 1
6: Multi-step speed control terminal 2
7: Multi-step speed control terminal 3
8: Multi-step speed control terminal 4
9: Acceleration/deceleration time selection terminal 1
10:Acceleration/deceleration time
selection terminal 2
11:Acceleration/deceleration time
selection terminal 3
12:Acceleration/deceleration time
selection terminal 4
13: Main and auxiliary frequency
operational rule selection terminal 1
14: Main and auxiliary frequency
operational rule selection terminal 2
15: Main and auxiliary frequency
operational rule selection terminal 3
16:Frequency ascending command (UP)
17: Frequency descending command
(DOWN)
18:Frequency ascending/descending
frequency resetting
19: Multi-step closed loop terminal 1
20: Multi-step closed loop terminal 2
21: Multi-step closed loop terminal 3
22:External equipment failure input
23: external interruption input
24: external resetting input
25: Free stop input
26: External stop instruction—Stop
according to the stop mode
27: stop DC braking input command DB
1 1 ×
52

5 Function parameter schedule graph
28:inverter running prohibited—Stop
according to the stop mode
29:Acceleration/deceleration prohibited
command
30: Three-wire running control
31: Process PID invalid
32:Process PID stop
33: Process PID integral holding
34:Process PID integral resetting
35:Process PID function negation(Closed loop adjustment
feature negation)
36: simple PLC invalid
37: simple PLC halted
38: simple PLC stop state resetting
39: main frequency switchover to digit
(keypad)
40: main frequency switchover to AI1
41: main frequency switchover to AI2
42: reserved
43: reserved
44: main frequency setting channel
selection terminal 1
45: main frequency setting channel
selection terminal 2
46: main frequency setting channel
selection terminal 3
47: main frequency setting channel
selection terminal 4
48: Auxiliary frequency reset
49: Command switchover to panel
50: Command switchover to terminal
51: Command switchover to
communication
52:Running command Channel selection
terminal 1
53:Running command Channel selection
terminal 2
50:Forward prohibited command(Stop
according to the stop mode: invalid for
jogging command)
55:Reverse prohibited command (Stop
according to the stop mode: invalid for
jogging command)
56:Swinging frequency input
57:Resetting state of swinging frequency
58:Interior counter reset end
59:Interior counter input end
60:Internal timer resetting
61:Internal timer triggering
62:Length count input
63:Length reset
64:Reset this operation time
65:Speed/torque control selection
66~90:Reserved
91:Pulse frequency input (F00.19 can’t be 3) (X7 VALID)
92:Pulse width PWM input (X7 VALID)
F08.19 Input terminal X2 function Same as above 1 2 ×
93~96:Reserved
53

5 Function parameter schedule graph
selection
F08.20 Input terminal X3 function
selection
F08.21 Input terminal X4 function
selection
F08.22 Input terminal X5 function
selection
F08.23 Input terminal X6 function
selection
F08.24 Input terminal X7 function
selection
F08.25 Reserved
F08.26 FWD/REV operating mode
selection
F08.27 Set internal count value to
setting
F08.28 Specify internal count to
setting
F08.29 Internal timer timing setting 0.1~6000.0s 0.1 60.0s ○
F08.30 Terminal pulse encoder
frequency rate
F08.31 Special function selection LED units digit: jog previous selection
Same as above 1 0 ×
Same as above 1 0 ×
Same as above 1 0 ×
Same as above 1 0 ×
Same as above 1 0 ×
0: Two-wire control mode 1
1: Two-wire control mode 2
2: Two-wire control mode 3 (monopulse control mode)
3:Three-wire control mode 1
4:Three-wire control mode 2
0~65535 1 0 ○
0~65535 1 0 ○
0.01 ~ 10.00Hz(only be effective by given X1:X2
encoder)
0: top level
1: lowest level
LED tens digit: keyboard showed parameter setup(under
speed control mode)
0: Show setup frequency
1: Show setup torque
1 0 ×
0.01Hz 1.00Hz ○
F09-Output Terminal Corrective Functions
Function
code
F09.00 Open collector output
Name Set range
terminal Y1 output setup
0:terminal unused
1:operation(RUN)
2:CW run
3:CCW run
4:DC brake
5:run prepare finish(bus bar voltage normal, fault free, no run
forbid,receiver of run command’s status)
6:stop command indication
7:no current detected
8:overcurrent detected
9:current1 arrival
10:current2 arrival
11:no frequency output
12:frequency arrival signal(FAR)
13:frequency level detect signal 1(FDT1)
14:frequency level detect signal 2(FDT2)
15:output frequency arrival upper limit(FHL)
16:output frequency arrival low limit(FLL)
17:frequency 1 arrival output
18:frequency 2 arrival output
Min.
Factory
unit
default
1 0 ×
Modifi
-cation
54

5 Function parameter schedule graph
19:overload pre-alarm signal(OL)
20:undervoltage lockout stop (LU)
21:external fault stop(EXT)
22:fault
23:alarm
24:simple PLC operation
25:simple PLC section operation finish
26:simple PLC circle operation finish
27:simple PLC operation stop
28:traverse frequency high and low limit
29:setup length arrival
30:internal counter final value arrival
31:internal counter designated value
arrival
32:internal timer arrival---output 0.5s valid
signal on arrival
33:operation stop time finish
34:operation arrival time finish
35:setup run time arrival
36:setup power on time arrival
st
37:1
pump variable frequency
st
38:1
pump power frequency
39:reserved
40:reserved
41:communication provision
42:torque control speed limiting
43:torque receive output
44:reserved
45:holding brake logic 1(forward& reverse process
holding brake)
46:holding brake logic 2(forward& reverse process not
holding brake)
47: vfd run 1 (run with no electric)
48:analog input brake line signal output
49:X1 terminal close valid
50:X2 terminal close valid
F09.01 Open collector output
terminal Y2 output setup
F09.02 Reserved
F09.03 Reserved
F09.04 RLY1 output setup Same as ab ove 1 22 ×
Frequency
F09.05
arrival(FAR)detection range
F09.06 FDT1(frequency level)level 0.00Hz~upper limit frequency 0.01Hz 10.00Hz ○
F09.07 FDT1 lag 0.00~50.00Hz 0.01Hz 1.00Hz ○
F09.08 FDT2(frequency level)level 0.00Hz~upper limit frequency 0.01Hz 10.00Hz ○
F09.09 FDT2 lag 0.00~50.00Hz 0.01Hz 1.00Hz ○
F09.10 Zero frequency signal
detection value
F09.11 Zero frequency return
difference
F09.12 Zero-current detection range 0.0~50.0% 0.1% 0.0% ○
F09.13 Zero-current detection time 0.00~60.00s 0.01s 0.1s ○
F09.14 Over-current detection value 0.0~250.0% 0.1% 160.0% ○
F09.15 Over-current detection time 0.00~60.00s 0.01s 0.00s ○
F09.16 Current 1 arrival detection 0.0~250.0% 0.1% 100.0% ○
51~60:reserve
Same as above 1 0 ×
0.00~50.00Hz 0.01Hz 5.00Hz ○
0.00Hz~upper limit frequency
0.00Hz~upper limit frequency
0.01Hz 0.00Hz
0.01Hz 0.00Hz
○
○
55

5 Function parameter schedule graph
value
F09.17 Current 1 width 0.0~100.0% 0.1% 0.0% ○
F09.18 Current 2 arrival detection
value
F09.19 Current 2 width 0.0~100.0% 0.1% 0.0% ○
F09.20 Frequency 1 arrival detection
value
F09.21 Frequency 1 arrival detection
width
F09.22 Frequency 2 arrival detection
value
F09.23 Frequency 2 arrival detection
width
F09.24 Output terminal positive and
negative logic setup
F09.25 Y1 output open delay time 0.000~50.000s 0.001s 0.000s ○
F09.26 Y1 output close delay time 0.000~50.000s 0.001s 0.000s ○
F09.27 Y2 output open delay time 0.000~50.000s 0.001s 0.000s ○
F09.28 Y2 output close delay time 0.000~50.000s 0.001s 0.000s ○
F09.29 Reserved
F09.30 Reserved
F09.31 Reserved
F09.32 Reserved
F09.33 RLY1 output close delay
time
F09.34 RLY1 output turn-off delay
time
F09.35 Analog output(AO) selection 0:output frequency before slip
F09.36 Reserved
F09.3 7 DO function selection(with Y2
reuse)
0.0~250.0% 0.1% 100.0% ○
0.00Hz~upper limit frequency 0.01Hz 50.00Hz ○
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ○
0.00Hz~upper limit frequency 0.01Hz 50.00Hz ○
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ○
0000~FFFF(extension valid) 1 0000 ○
0.000~50.000s 0.001s 0.000s ○
0.000~50.000s 0.001s 0.000s ○
compensation(0.00Hz~upper limit frequency)
1:output frequency after slip
compensation(0.00Hz~upper limit
frequency)
2:Setup frequency(0.00Hz~upper limit frequency)
3:main setting frequency(0.00Hz~upper limit
frequency)
4:auxiliary setting frequency(0.00Hz~upper limit
frequency)
5:output current 1(0~2×inverter rated current)
6:output current 2(0~3×motor rated current)
7:output voltage(0~1.2×load motor rated voltage)
8:busbar voltage(0~1.5×rated bus bar voltage)
9:motor speed(0~3 rated speed)
10:PID provision(0.00~10.00V)
11:PID feedback(0.00~10.00V)
12:AI1(0.00~10.00V or 4~20mA)
13:AI2(-10.00~10.00V or 4~20mA)
14:communication provision
15:motor rotor speed(0.00Hz~upper limit frequency)
16:current setup torque(0~2 rated torque)
17:current output torque(0~2 rated torque)
18: torque current at present(0~2 rated current)
19:flux current at present(0-1 motor rated flux current)
20~25: Reserved
Same as above
1 0 ○
1 0 ○
56

5 Function parameter schedule graph
p
F09.38 Reserved
F09.39 Analog output(AO1) filter
time
F09.40 Analog output(AO1) gain 0.00~2.00 0.01 1.00 ○
F09.41 Analog output(AO1) bias 0.0~100.0% 0.1% 0.0% ○
F09.42 Reserved
F09.43 Reserved
F09.44 Reserved
F09.45 DO filter time 0.0~20.0s 0.1s 0.0s ○
F09.46 DO output gain 0.00~2.00 0.01 1.00 ○
F09.4 7 DO maximum pulse output
frequency
F09.48 Torque achieve output
detection time
F09.49 Reserved
F09.50 Reserved
0.0~20.0s 0.1s 0.0s ○
0.1~20.0KHz 0.1KHz 10.0KHz ○
0.02~200.00s
0.01s 1.00s ○
F10-Simple PLC/Multi-speed Function Parameter Group
Function
code
F10.00 Simple PLC run
F10.01 Phase 1 setup 000H~E22H
Name Set range
setup
LED units digit: run mode selection
0:inaction
1:stop after single cycle
2:final value keep after single cycle
3:continuous cycle
LED tens digit: interrupt run restart mode
selection
0:restart from first phase
1:continuous run from phase frequency at interruption
2:continuous run from run frequency at interruption
LED hundreds digit: PLC run time unit
0:second
1:minute
LED thousands digit: power-down memory selection
0:no memory
1:phase of reserve power down, frequency
recording PLC run status: contain power down phase, run
frequency, time have run.
LED units digit: frequency setup
0:multistage frequency i (i=1~15)
1:frequency determined by complex frequency of main
and auxiliary
2: Reserved
LED tens digit: operation direction selection
0:forward
1:reversal
2:determine by run command
LED hundreds digit: ACC/DEC time selection
0:ACC/DEC time 1
1:ACC/DEC time 2
2:ACC/DEC time 3
3:ACC/DEC time 4
4:ACC/DEC time 5
5:ACC/DEC time 6
ower down
Min.
Factory
default
Modifi
-cation
unit
1 0000 ×
1 000 ○
57

5 Function parameter schedule graph
6:ACC/DEC time 7
7:ACC/DEC time 8
8:ACC/DEC time 9
9:ACC/DEC time 10
A:ACC/DEC time 11
B:ACC/DEC time 12
C:ACC/DEC time 13
D:ACC/DEC time 14
F10.02 Phase 2 setup 000H~E22H 1 000 ○
F10.03 Phase 3setup 000H~E22H 1 000 ○
F10.04 Phase 4 setup 000H~E22H 1 000 ○
F10.05 Phase 5 setup 000H~E22H 1 000 ○
F10.06 Phase 6 setup 000H~E22H 1 000 ○
F10.07 Phase 7 setup 000H~E22H 1 000 ○
F10.08 Phase 8 setup 000H~E22H 1 000 ○
F10.09 Phase 9 setup 000H~E22H 1 000 ○
F10.10 Phase 10 setup 000H~E22H 1 000 ○
F10.11 Phase 11 setup 000H~E22H 1 000 ○
F10.12 Phase 12 setup 000H~E22H 1 000 ○
F10.13 Phase 13 setup 000H~E22H 1 000 ○
F10.14 Phase 14 setup 000H~E22H 1 000 ○
F10.15 Phase 15 setup 000H~E22H 1 000 ○
F10.16 Phase 1 run time 0~6000.0 0.1 10.0 ○
F10.17 Phase 2 run time 0~6000.0 0.1 10.0 ○
F10.18 Phase 3 run time 0~6000.0 0.1 10.0 ○
F10.19 Phase 4 run time 0~6000.0 0.1 10.0 ○
F10.20 Phase 5 run time 0~6000.0 0.1 10.0 ○
F10.21 Phase 6 run time 0~6000.0 0.1 10.0 ○
F10.22 Phase 7 run time 0~6000.0 0.1 10.0 ○
F10.23 Phase 8 run time 0~6000.0 0.1 10.0 ○
F10.24 Phase 9 run time 0~6000.0 0.1 10.0 ○
F10.25 Phase 10 run time 0~6000.0 0.1 10.0 ○
F10.26 Phase 11 run time 0~6000.0 0.1 10.0 ○
F10.27 Phase 12 run time 0~6000.0 0.1 10.0 ○
F10.28 Phase 13 run time 0~6000.0 0.1 10.0 ○
F10.29 Phase 14 run time 0~6000.0 0.1 10.0 ○
F10.30 Phase 15 run time 0~6000.0 0.1 10.0 ○
F10.31 Multi-section frequency 1 0.00Hz ~upper limit frequency 0.01Hz 5.00Hz ○
F10.32 Multi-section frequency 2 0.00Hz ~upper limit frequency 0.01Hz 10.00Hz ○
F10.33 Multi-section frequency 3 0.00Hz ~upper limit frequency 0.01Hz 20.00Hz ○
F10.34 Multi-section frequency 4 0.00Hz ~upper limit frequency 0.01Hz 30.00Hz ○
F10.35 Multi-section frequency 5 0.00Hz ~upper limit frequency 0.01Hz 40.00Hz ○
F10.36 Multi-section frequency 6 0.00Hz ~upper limit frequency 0.01Hz 45.00Hz ○
F10.37 Multi-section frequency 7 0.00Hz ~upper limit frequency 0.01Hz 50.00Hz ○
F10.38 Multi-section frequency 8 0.00Hz ~upper limit frequency 0.01Hz 5.00Hz ○
F10.39 Multi-section frequency 9 0.00Hz ~upper limit frequency 0.01Hz 10.00Hz ○
F10.40 Multi-section frequency 10 0.00Hz ~upper limit frequency 0.01Hz 20.00Hz ○
F10.41 Multi-section frequency 11 0.00Hz ~upper limit frequency 0.01Hz 30.00Hz ○
F10.42 Multi-section frequency 12 0.00Hz ~upper limit frequency 0.01Hz 40.00Hz ○
F10.43 Multi-section frequency 13 0.00Hz ~upper limit frequency 0.01Hz 45.00Hz ○
F10.44 Multi-section frequency 14 0.00Hz ~upper limit frequency 0.01Hz 50.00Hz ○
F10.45 Multi-section frequency 15 0.00Hz ~upper limit frequency 0.01Hz 50.00Hz ○
E:ACC/DEC time 15
58

5 Function parameter schedule graph
Function
code
F11.00 Close loop run control selection 0:PID close loop run control invalid
F11.01 Provide channel selection 0:digital provide
F11.02 Feedback channel
F11.03 Provide channel
F11.04 Feedback channel
F11.05 PID output filtering
F11.06
F11.07 Proportional gain Kp 0.000~9.999 0.001 0.150 ○
F11.08 Integral gain Ki 0.000~9.999 0.001 0.150 ○
F11.09 Differential gain Kd 0.000~9.999 0.001 0.000 ○
F11.10 Sample period T 0.01~1.00s 0.01s 0.10s ○
F11.11 Deviation range 0.0~20.0% correspond to provide value percentage 0.1% 2.0% ○
F11.12 PID differential range 0.00~100.00% 0.01% 0.10% ○
F11.13 Close-loop adjust characteristic 0:action
F11.14 Feedback channel
F11.15 PID adjusting upper limit
F11.16 PID adjusting low limit frequency Low limit frequency~ upper limit frequency 0.01Hz 0.00Hz ○
F11.17 Integral adjusting selection 0:when integral arrival separate PID
F11.18 Integral separate PID threshold
F11.19 Close-loop preset
Name Set range
1:PID close loop run control valid
1:AI1 analog provide
2:AI2 analog provide
3:reserved
4:reserved
5:pulse provide
6:communication provide(add:1D00)
7:reserved
8:reserved
selection
filtering time
filtering time
time
Provide digital setup 0.00~10.00V
plus-minus characteristic
frequency
value
frequency
0:AI1 analog input
1:AI2 analog input
2:EAI1 analog input
3:EAI2 analog input
4:AI1+AI2
5:AI1-AI2
6:Min{AI1,AI2}
7:Max{AI1,AI2}
8:pulse input
9:communication feedback(add:1DOC, 4000
represent 10.00V)
0.01~50.00s 0.01s 0.20s ×
0.01~50.00s 0.01s 0.10s ×
0.00~50.00s 0.01s 0.00s ○
1:reaction
0:Positive characteristic
1:Negetive characteristic
Low limit frequency~ upper limit frequency 0.01Hz 50.00Hz ○
threshold value,stop integral
adjusting
1:when integral arrival separate PID
threshold value,continue threshold
value adjusting
0.0~100.0% 0.1% 100.0% ○
0.00Hz ~upper limit frequency 0.01Hz 0.00Hz ○
Min.
Factory
unit
default
1 0 ×
1 0 ○
1 0 ○
0.01V 1.00V ○
1 0 ○
1 0 ○
1 0 ○
F11-close loop PID run function parameter group
Modifi
-cation
59

5 Function parameter schedule graph
F11.20 Close-loop preset
frequency keep time
F11.21 Close-loop output
changeover selection
Close-loop output frequency
F11.22
maximum value
F11.23 Multi-section close-loop
provide 1
F11.24 Multi-section close-loop
provide 2
F11.25 Multi-section close-loop
provide 3
F11.26 Multi-section close-loop
provide 4
F11.27 Multi-section close-loop
provide 5
F11.28 Multi-section close-loop
provide 6
F11.29 Multi-section close-loop
provide 7
0.0~6000.0s 0.1s 0.0s ○
0:close-loop output minus,low limit
frequency run.
1:close-loop output minus,reverse run
(effect by run direction setting )
2:comfirmed by run order
0.00Hz~upper limit frequency 0.01Hz 50.00Hz ○
0.00~10.00V 0.01V 0.00V ○
0.00~10.00V 0.01V 0.00V ○
0.00~10.00V 0.01V 0.00V ○
0.00~10.00V 0.01V 0.00V ○
0.00~10.00V 0.01V 0.00V ○
0.00~10.00V 0.01V 0.00V ○
0.00~10.00V 0.01V 0.00V ○
1 0 ○
F12-Constant Pressure Water Supply Function Parameter Group
Function
code
F12.00 Constant pressure water supply
F12.01 Target pressure setup 0.000~long-distance pressure gage
F12.02 Sleep freq uency
F12 .03 Aw ake pres sur e Thr esh old 0 .000 ~lo ng-d ist anc e pre ssu re ga ge r ang e 0.001Mpa 0.150Mpa ○
F12.04 Sleep delay time 0.0~6000.0s 0.1s 0.0s ○
F12.05 Awake delay time 0.0~6000.0s 0.1s 0.0s ○
F12.06 long-distance pressure gage
F12.07 allowed aviation of upper limit
F12.08 Pump switching estimate time 0.2~999.9s 0.1s 5.0s ○
F12.09 Electromagnetism switch
F12.10 Automatically switching time
F12.11
Name Set range
mode selection
minimum value
range
frequency and low limit
frequency: when add or
decrease pump
converter delay time
interval
Wake up pattern selection
0:no constant pressure water supply
1: reserved
2: reserved
3: reserved
4: reserved
5:chooce vfd Y1,Y2 as two pumps time limited
rotate work, constant voltage supply water type
range
0.00Hz~upper limit frequency 0.01Hz 30.00Hz ○
0.0 01 ~9. 99 9Mp a 0.001Mpa 1.000Mpa ○
0.1~100.0% 0.1% 1.0% ○
0.1~10.0s 0.1s 0.5s ○
0000~65535 minute 1 0 ×
0: wake up according to the F12.03 pressure
1: wake up as the pressure F12.12*F12.01
calculated
Min.
Factory
unit
default
1 0 ×
0.001Mpa 0.200Mpa ○
1 0 ○
60
Modifi
-cation

5 Function parameter schedule graph
F12.12 Wake up pressure coefficient 0.01-0.99 0.01 0.75 ○
F12.13 Reserved
F12.14 Reserved
F13-Traverse/ Fixed Length Control Function Parameter Group
Function
code
F13.00 Traverse function enable 0:traverse invalid
F13.01 Traverse run mode LED units digit: enter mode
F13.02
F13.03 Jump frequency 0.0~50.0% 0.1% 2.0% ○
F13.04 Traverse cycle 0.1~999.9s 0.1s 10.0s ○
F13.05 Triangular wave up time 0.0~98.0% (traverse cycle) 0.1% 50.0% ○
F13.06
F13.07 Traverse preset
F13.08 Setup length 0~65535(m/cm/mm) 1m 0m ○
F13.09 Pulse No. of axis per circle 1~10000 1 1 ○
F13.10 Axis perimeter 0.01~655.35cm 0.01cm 10.00cm ○
F13.11 Length left percent 0.01~100.00%
F13.12 Length correction
F13.13 After length arrival: record
F13.14 When stop: record length
Name Set range
1:traverse valid
0:automatically enter
1:terminal enter manually
LED tens digit:
0:variable swing
1:fixed swing
LED hundreds digit: traverse halt start mode
selection
0:restart
1:start as previous halt record
LED thousands digit: traverse status reserve
selection
0:no reserve
Traverse frequency swing
value
Traverse preset
frequency
frequency waiting
time
coefficient
length manage
manage
1:reserve
0.0~50.0% 0.1% 10.0% ○
0.00~400.00Hz 0.01Hz 0.00Hz ○
0.0~6000.0s 0.1s 0.0s ○
0.001~10.000 0.001 1.000 ○
LED units digit: reserve
LED tens digit: set length units
0: meter
1: cm
2: mm
LED hundreds digit: act after length fulfill
0: continue working
1: recycle limit length control
LED hundreds digit: software reset length(can reset by
communication)
0: keep free
1: the current length is cleared
2: the current and total length both cleared
LED units digit: stop and deal with the current length
0: auto reset
1: keep length
Min.
Factory
default
Modifi
-cation
unit
1 0 ×
1 0000 ×
0 1 ○
0 1 ○
61

5 Function parameter schedule graph
LED tens digit: power low down length reserve setup
0: no reserve
1: reserved
LED hundreds digit: stop and calculate length
0: don’t calculate
1: calculate
F14-Vector Control Parameter Group
Function
code
F14.00
F14.01 Speed loop high speed
F14.02 Speed loop high speed integral
F14.03 Speed loop low speed
F14.04 Speed loop low speed integral
F14.05 Speed loop parameter
F14.06 Low frequency generate
F14.07 Current loop proportional gain 1~500(valid when F00.24=1 or 2) 1 70 ○
F14.08 Current loop integral time 0.1~100.0ms(valid when F00.24=1 or 2) 0.1ms 4.0ms ○
F14.09 Forward electric torque
F14.10 Forward brake torque current
F14.11 Asynchronous motor low flux
F14.12 Asynchronous motor min flux
F14.13
Name Set range
Speed/torque control selection
proportional gain
time
proportional gain
time
switchover frequency
electricity stable coefficient
current limit value
(Reverse brake torque current
limit)
limit value (Reverse electric
torque current limit)
control coefficient
coefficient
Setting and limit torque
channel selection
0: speed control
1: torque control(valid when F00.24=1 or 2)
0.1~40.0(valid when F00.24=1&2) 0.1 20.0 ○
0.001~10.000s(valid when F00.24=1 or 2)
0.1~80.0(valid when F00.24=1 or 2)
0.001~10.000s(valid when F00.24=1 or 2)
0.00Hz~20.00Hz(valid when F00.24=1 or 2)
0~50 (valid when F00.24=1)
0.0~250.0%(valid when F00.24=1 or 2,3) 0.1% 160.0% ○
0.0~250.0%(valid when F00.24=1 or 2) 0.1% 160.0% ○
20.0~100.0%(valid when F00.24=1 or 2)
10.0~80.0%(valid when F00.24=2)
LED units digit: torque setting channel selection
0: digital setting
1: AI1 analog setting
2: AI2 simulation setting
3:Terminal UP / DOWN adjustment setting
4:communication setting (communication address:
1D01)
5: Reserved
6: Reserved
7: High-speed pulse setting (X7 terminal needs to be
selected to the corresponding function)
8: Reserved
LED Tens digit: electric torque limit channel selection
0: digital setting
1: AI1 analog setting
2: AI2 simulation setting
3: Terminal UP / DOWN adjustment setting
4: communication reference (communication address:
Min.
Factory
unit
default
1 0 ○
0.001s 0.040s ○
0.1s 20.0 ○
0.001Hz 0.020Hz ○
0.01Hz 5.00Hz ○
1 25 ○
0.1% 80.0%
0.1% 10.0%
1 0000 ×
62
Modifi
-cation
○
○

5 Function parameter schedule graph
1D01)
5: Reserved
6: Reserved
7: High-speed pulse setting (X7 terminal needs to be
selected to the corresponding function)
8: Reserved
LED hundreds digit: brake torque limit channel
selection
0: digital setting
1: AI1 analog setting
2: AI2 simulation setting
3: Terminal UP / DOWN adjustment setting
4: communication setting (communication address:
1D01)
5: Reserved
6: Reserved
7: High-speed pulse setting (X7 terminal needs to be
selected to the corresponding function)
8: Reserved
LED thousands digit: reserved
F14.14 Torque polarity setting LED units digit: Torque setting polarity
F14.15 Torque digital setting value 0.0~200.0%(valid when F00.24=1&2) 0.1% 0.0% ○
F14.16 Torque control forward speed
limit channel selection
F14.17 Torque control reverse speed
limit channel selection
Note: This parameter is valid when F00.24 = 1 or 2.
0: Positive
1: negative
2: determined by operation command
LED tens digit: Torque compensation polarity
0: Same as setting torque direction
1: Contrary to the set torque direction
LED hundreds digit: F14.21 function is weakened
when the motor is stalled
0: invalid
1: effective
LED thousands digit: torque control anti-reversing
function
0: invalid
1: Enable torque control the anti-reversing function
remains active
2: only the start moment there is anti-reversal
processing
Note: This parameter is valid when F00.24 = 1 or 2.
0: digital setting
1: AI1 analog setting
2: AI2 simulation setting
3: Terminal UP / DOWN adjustment setting
4: communication reference (communication address:
1D0A)
5: Reserved
6: Reserved
7: High-speed pulse setting (X7 terminal needs to be
selected to the corresponding function)
8: Reserved
Note: This parameter is valid when F00.24 = 1 or 2.
0: digital setting
1: AI1 analog setting
2: AI2 simulation setting
3: Terminal UP / DOWN adjustment setting
4: communication reference (communication address:
1 0000 ○
1 0 ×
1 0 ×
63

5 Function parameter schedule graph
1D0B)
5: Reserved
6: Reserved
7: High-speed pulse setting (X7 terminal needs to be
selected to the corresponding function)
8: Reserved
Torque control forward speed
F14.18
limit value
Torque control reverse speed
F14.19
limit value
Set the torque acceleration /
F14.20
deceleration time
F14.21 Torque compensation 0.0~100.0%(valid when F00.24 = 1 or 2.) 0.1% 5.0% ○
Positive torque gain
F14.22
adjustment coefficient
Negative torque gain
F14.23
adjustment coefficient
F14.24 Flux brake coefficient 0.0~300.0%(valid when F00.24 = 1 or 2.) 0.1% 0.0% ○
Pre-excitation start time
F14.25
constant
F14.26 Speed loop proportion gain 0.010~6.000(valid when F00.24 = 3.) 0.001 0.500 ○
Speed loop integral time
F14.27
constant
F14.28 Motor stable coefficient 10~300(valid when F00. 24 = 3.) 1 100 ○
Suppresses the oscillation
F14.29
compensation gain
Torque compensation cutoff
F14.30
frequency
Note: This parameter is valid when F00.24 = 1 or 2.
0.00Hz~upper limit frequency(valid when F00.24 =
1 or 2.)
0.00Hz~upper limit frequency(valid when F00.24 =
1 or 2.)
0.000~60.000s(valid when F00.24 = 1 or 2.)
50.0~150.0%(valid when F00.24 = 1 or 2.)
50.0~150.0%(valid when F00.24 = 1 or 2.)
0.1~3.0(valid when F00.24 = 1)
0.010~9.999(valid when F00.24 = 3.)
100.0~130.0%(valid when F00.24 = 3.)
0.00Hz~upper limit frequency(valid when F00.24 =
1 or 2.)
0.01Hz 50.00Hz
0.01Hz 50.00Hz
0.001s 0.100s
0.1% 100.0%
0.1% 100.0%
0.1 0.5 ×
0.001 0.360
0.1% 100.0%
0.01Hz 20.00Hz ○
F15-Asynchronous Motor Parameter Group
Function
code
F15.00 Reserved
F15.01 Asynchronous motor rated
F15.02 Asynchronous motor rated
F15.03 Asynchronous motor rated
F15.04 Asynchronous motor rated
F15.05 Asynchronous motor rated
F15.06 Asynchronous motor poles No. 1~7 1 2 ×
F15.07 Asynchronous motor stator
F15.08 Asynchronous motor rotor
F15.09 Asynchronous motor leakage
F15.10 Asynchronous motor mutual
F15.11 Asynchronous motor no load
Name Set range
power
voltage
current
frequency
speed
resistance
resistance
inductance
inductance
current
0.1~6553.5KW 0.1KW Base on
1~690V 1V Base on
0.1~6553.5A 0.1A Base on
0.00~600.00Hz 0.01Hz Base on
0~60000r/min 1r/min Base on
0.0000~65.535Ω 0.001Ω Base on
0.000~65.535Ω 0.001Ω Base on
0.00~655.35mH 0.01mH Base on
0.00~6553.5mH 0.01mH Base on
0.01~655.35A 0.01A Base on
Min.
unit
Factory
default
motor type
motor type
motor type
motor type
motor type
motor type
motor type
motor type
motor type
motor type
64
○
○
○
○
○
○
○
Modifi
-cation
×
×
×
×
×
×
×
×
×
×

5 Function parameter schedule graph
F15.12 Reserved
F15.13 Reserved
F15.14 Reserved
F15.15 Reserved
F15.16 Reserved
F15.17 Reserved
F15.18 Reserved
F15.19 Motor parameter auto
adjustment selection
F15.20 Reserved
F15.21 Reserved
F15.22 Reserved
0: no action
1: Asynchronous motor static self-tuning
2: Asynchronous motor rotation no-load self-tuning
3: Reserved
Note:
Before setting, you need to set the nameplat
① e data
correctly
motor parameter group can be set according to the
②
type of design automatically
Value, can also be manually modified, and self-tuning
correction.
After modifying the F15.01 parameter, other
③
parameters of the motor will be automatically set to the
default value.
1 0 ×
F16-Reserved Parameter Group 1
Function
code
F16.00 Zero servo energy 0:Zero servo invalid
F16.01 Coder line number 1~10000 1 1024 ○
F16.02 Coder line direction Unit digit: AB phase sequence
F16.03 Coder frequency
F16.04 Coder smoothing coefficient 5~100 1 15 ○
F16.05 Reserved
F16.06 Reserved
F16.07 Reserved
F16.08 Reserved
F16.09 Reserved
F16.10 Reserved
F16.11 Reserved
F16.12 Reserved
F16.13 Reserved
Name Set range
1:Zero servo valid
0:forward direction
1:reverse direction
Tens digit: reserved
demultiplication coefficient
0.001~60.000
Min.
Factory
default
Modifi
-cation
unit
1 0 ○
1 00 ×
0.001 1.000 ○
F17-Reserved Parameter Group 2
Function
code
F17.00~
Reserved
F17.20
Name Set range
Min.
Factory
default
Modifi-
cation
unit
65

5 Function parameter schedule graph
F18-Enhance Control Parameter Group
Function
code
F18.00 Operation panel control
F18.01 Terminal control
F18.02 Communication
F18.03 Digital frequency integral
F18.04 Keyboard UP/DW integral
F18.05 Keyboard no integral single
F18.06 Ter minal UP/DW integral
F18.07 Terminal no integral single
F18.08 Droop control decline
F18.09 Setup accumulate power on
F18.10 Setup accumulate run time 0~65535h 1 0 ○
F18.11 Setup run function enable 0:invalid
F18.12 Setup run stop time 0.1~6500.0Min 0.1Min 2.0Min ○
F18.13 Currently run arrival time 0.0~6500.0Min 0.1Min 1.0Min ○
F18.14 Keyboard UP/DW selection 0:keyboard frequency provide value adjusting 1 0 ○
Name Set range
frequency binding
frequency binding
control frequency
binding
function selection
rate
step’s size setup
rate
step’s size setup
frequency
time
0:no binding
1:operation keyboard digital setup
2:AI1 analog setup
3:AI2 analog setup
4:terminal UP/DOWN adjusting setup
5:communication provide
6:reserved
7: reserved
8:high speed pulse setup( X7 terminal
need choose the relative function)
9: reserved
10:terminal encoder provide(decide by
X1,X2)
11~15:Reserved
Same as above 1 0 ○
Same as above 1 0 ○
LED units digit: keyboard UP/DW integral control
0: integral function
1: no integral function
LED tens digit: terminal UP/DW integral control
0: integral function
1: no integral function
LED hundreds digit: keyboard shuttle knob enabled(The
shuttle keyboard is valid)
0: in the monitoring interface, the shuttle knob is valid
1: in the monitoring interface, the shuttle knob is invalid
LED thousands digit: keyboard adjustment frequency
Classic mode selection
0: invalid
1: valid, adjustment range confirmed by F18.05
0.01~50.00Hz 0.01Hz 0.10Hz ○
0.01~10.00Hz 0.01Hz 0.01Hz ○
0.01~50.00Hz 0.01Hz 0.20Hz ○
0.01~10.00Hz 0.01Hz 0.10Hz ○
0.00~10.00Hz 0.01Hz 0.00Hz ○
0~65535h 1 0 ○
1:valid
Min.
Factory
unit
default
1 0 ○
1 00 ○
1 0 ○
66
Modifi
-cation

5 Function parameter schedule graph
under monitor mode 1:PID digital provide value adjusting
F18.15 V/F oscillation suppression
cutoff frequency
F18.16 Advanced control selection LED units digit: torque closed loop control enabled
F18.17 Cooling fan control selection LED units digit: fan control mode
F18.18 No velocity vector slip gain 50~200% 1% 100% ○
F18.19 Total power c onsumption
lower position
F18.20 Total power c onsumption
higher position
F18.21 Power consumption calculate
coefficient
F18.22 V / F separation control
voltage reference channel
F18.23 V / F separation control
voltage digital reference
channel
F18.24 Reserved 30~300% 1% 100% ○
2~6:Reserved
0.00Hz~upper limited frequency 0.01Hz 50.00Hz ○
0: Torque open loop control
1: Torque closed loop control
LED tens digit: Torque limit mode
0: Rated by the drive rated current
1: Rated by motor rated torque
LED hundreds digit: lower than the lower frequency of
fast crossing enable
0: invalid
1: effective
LED thousands digit: Torque control when low torque
reference PWM block is enabled
0: invalid
1: effective
Note: This parameter is valid when F00.24 = 1 or 2
0: Smart fan
1: The inverter has been running after power-on
2: fan is prohibited, but the temperature is greater than 75
degrees automatically open
LED tens digit: adjustable speed fan control mode
0: Intelligent PWM speed control
1: Run at maximum speed
0~9999
0~65535(1 represent 10000 degree) 10000
50.0%~200.0%
0: number setting (determined by 18.23)
1: AI1 analog setting
2: AI2 simulation setting
3: Terminal UP / DOWN adjustment setting
4: Reserved
5: Reserved
6: Reserved
7: High speed pulse setting
(X7 terminal need to select the corresponding
function)
8: Reserved
Note: The maximum value of 0 ~ 8 channels corresponds
to the motor rated voltage
0.0%~100%
1 0001 ○
1 00 ○
1 degree 0
0
degree
0.1% 100.0%
1 1
0.1% 0.0%
○
F19-Protective Relevant Function Parameter Group
Function
code
F19.00 Power off restart waiting time 0.0~20.0s(0 means no start function) 0.1s 0.0s ×
Name Set range
Min.
unit
Factory
default
Modifi
-cation
○
○
○
○
67

5 Function parameter schedule graph
F19.01 Fault self-recovery times 0~10(0 means no automatic reset function) 1 0 ×
F19 .0 2 Fault self-recovery
interval time
F19.03 Motor overload protection
action selection
F19.04 Motor overload protection
coefficient
F19.05 Inverter overload pre-alarm
detection selection
F19.06 Inverter overload pre-alarm
detection level
F19.07 Inverter overload pre-alarm
delay time
F19.08 Motor under-load alarm
detection level
F19.09 Motor under-load alarm
detection time
F19.10 Motor under-load alarm
detection action
F19.11 Input& output phase loss,
short circuit detection action
F19.12 Overvoltage stall selection 0:forbid
F19.13 Overvoltage stall protection
voltage
F19.14 Automatic current limit level 110~230%,G type rated current 1% 170% ×
F19.15 Frequency decline rate of
automatic current limit
F19.16 Automatic current limit action
selection
F19.17 Reserved
F19.18 Motor run section selection
when instant power off
F19.19 Frequency droop rate when
instant power off
F19.20 Voltage rebound estimate time
when instant power off
0.5~20.0s 0.1s 5.0s ×
0:alarm: continuous run
1:alarm,stop run as halt mode
2:fault,free halt
20.0~120.0%(motor rated current) 0.1% 100.0% ×
0:detection all the time
1:detection as constant velocity
20~180%(inverter rated current) 1% 130% ○
0.0~20.0s 0.1s 5.0s ○
0.0~120.0%(motor rated current) 0.1% 50.0% ○
0.1~60.0s 0.1s 2.0s ○
LED units digit: detection selection
0:no detection
1:detection all the time when run
2:detection only when constant velocity
LED tens digit: action selection
0:alarm,continuous run
1:alarm,stop run as halt mode
2:fault,free halt
LED units digit: input phase loss
0:no detection
1:fault,free halt
LED tens digit: output phase loss
0:no detection
1:fault,free halt
LED hundreds digit: power-on on earth short circuit
protect detection enable
0:no detection
1:fault,free halt
LED thousands digit: operation on earth short circuit
protect detection enable
0:no detection
1:fault,free halt
1:allowed
100~150% 1% 125% ×
0.0 0~ 99. 99 Hz/ s 0.01Hz/s 10.00Hz/s ×
0:constant velocity invalid
1:constant velocity valid
0:forbid
1:allowed
0.0 0~ 99. 99 Hz/ s 0.01Hz/s 10.00Hz/s ×
0.00~10.00s 0.01s 0.10s ×
1 2 ×
1 0 ×
1 00 ○
1 1111 ○
1 1 ×
1 0 ×
1 0 ×
68

5 Function parameter schedule graph
F19.21 Action estimate voltage when
instant power off
F19.22 Allowed the longest off time
when instant power off
F19.23 Terminal external device fault
action selection
F19.24 Power on terminal protection
selection
F19.25 Provide lost detection value 0~100% 1% 0% ○
F19.26 Provide lost detection time 0.0~500.0s 0.1s 0.5s ○
F19.27 Feedback lost detection value 0~100% 1% 12% ○
F19.28 Feedback lost
detection time
F19.29 Deviation magnitude
abnormal detection value
F19.30 Deviation magnitude
abnormal detection time
F19.31 Protection action selection 1 LED units digit: PID provide loss detection act
F19.32 Protection action selection 2 LED units digit: communication abnormal
F19.33 Reserved
F19.34 Reserved
F19.35 Fault indication and clock LED units digit: fault indication selection during the 1 00 ×
60~100%(rated bus bar voltage) 1% 80% ×
0.30~5.00s 0.01s 2.00s ×
0:alarm,continuous run
1:alarm,stop run as halt mode
2:fault,free halt
0:invalid
1:valid
0.0~500.0s 0.1s 0.5s ○
0~100% 1% 50% ○
0.0~500.0s 0.1s 0.5s ○
0:no detection
1:alarm, continue run
2:alarm, stop run as halt mode
3:fault, free halt
LED tens digit: PID feedback loss detection act
0:no detection
1:alarm, continue run
2:alarm, stop run as halt mode
3:fault,free halt
LED hundreds digit: PID error value abnormal detect
action
0:no detection
1:alarm, continue run
2:alarm, stop run as halt mode
3:fault, free halt
action: include communication time out
and error
0:alarm, continue run
1:alarm, stop run as halt mode
2:fault, free halt
LED tens digit: E
selection
0:alarm, continue run
1:alarm, stop run as halt mode
2:fault, free halt
LED hundreds digit: contactor abnormal action
0:alarm,continue run
1:alarm,stop run as halt mode
2:fault,free halt
LED thousands digit: undervoltage fault indication
action selection
0:no detection
1:fault,free halt
2
PROM abnormal action
1 2 ×
1 1 ×
1 000 ○
1 1200 ×
69

5 Function parameter schedule graph
during the period of recovery period of fault reset automatically
F19.36 Continuous run frequency
selection when alarm
F19.37 Abnormal standby frequency 0.00Hz~upper limit frequency 0.01Hz 10.00Hz ×
F19.38 Coder brake line detect time 0.0~8.0s(no detected at 0) 0.01Hz 10.00Hz ○
F19.39 Over speed (OS) detection
value
F19.40 Over speed (OS) detection
time
F19.41 Speed deviate too large (DEV)
detection value
F19.42 Speed deviate too large (DEV)
detection time
F19.43 Over voltage suppression
coefficient
F19.44 Reserved
0:action
1:no action
LED tens digit: fault clock function selection: to
achieve fault display before power down: etc.
0:forbid
1:open
Match up with protect action
0:run at the frequency setup by now
1:run at the frequency of upper limit
2:run at the frequency of low limit
3:run at the frequency of abnormal for standby
0.0~120.0%(corresponding to upper limited frequency)
0.00~20.00s(no detected at 0)
0.0~50.0%(corresponding to upper limited frequency)
0.00~20.00s(no detected at 0) 0.1% 10.0% ○
0.0~100.0% 0.01s 0.00s ○
1 0 ×
0.1s 0.0s
0.1% 120.0%
0.01s 0.00s
F20-Internal Virtual Input Output Node Parameter Group
Function
code
F20.00 Virtual input VDI1 function
F20.01 Virtual input VDI2 function
F20.02 Virtual input VDI3 function
F20.03 Virtual input VDI4 function
F20.04 Virtual input VDI5 function
F20.05 Virtual output VDO1 function
F20.06 Virtual output VDO2 function
F20.07 Virtual output VDO3 function
F20.08 Virtual output VDO4 function
F20.09 Virtual output VDO5 function
F20.10 Virtual output VDO1 open
F20.11 Virtual output VDO2 open
F20.12 Virtual output VDO3 open 0.00~600.00s 0.01s 0.00s ○
Name Set range
selection
selection
selection
selection
selection
selection
selection
selection
selection
selection
delay time
delay time
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~90 1 0 ○
0~60 1 0 ○
0~60 1 0 ○
0~60 1 0 ○
0~60 1 0 ○
0~60 1 0 ○
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
Min.
unit
Factory
default
Modifi-c
70
○
○
○
ation

5 Function parameter schedule graph
delay time
F20.13 Virtual output VDO4 open
delay time
F20.14 Virtual output VDO1 open
delay time
F20.15 Virtual output VDO1 close
delay time
F20.16 Virtual output VDO2 close
delay time
F20.17 Virtual output VDO3 close
delay time
F20.18 Virtual output VDO4 close
delay time
F20.19 Virtual output VDO5 close
delay time
F20.20 Virtual input VDI enable
control
F20.21 Virtual input VDI status
digital setup
F20.22 Virtual input: output
connection
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
0.00~600.00s 0.01s 0.00s ○
00~FF 1 00 ○
00~FF 1 00 ○
00~FF
Bit0:VDI1 and VDO1 connection
0:positive logic
1:negative logic
Bit1:VDI2 and VDO2 connection
0:positive logic
1:negative logic
Bit3:VDI3 and VDO3 connection
0:positive logic
1:negative logic
Bit4:VDI4 and VDO4 connection
0:positive logic
1:negative logic
Bit4:VDI5 and VDO5 connection
0:positive logic
1:negative logic
1 00 ○
F21-Reserved Parameter Group 3
Function
code
F21.00~
F21.21
Name Set range
Reserved
Min.
Factory
default
Modifi-
cation
unit
F22-Reserved Parameter Group 4
Function
code
F22.00~
F22.17
Name Set range
Reserved
Min.
Factory
default
Modifi-
cation
unit
F23-Reserved Parameter Group 5
Function Name Set range Min. Factory Modifi
71

5 Function parameter schedule graph
code unit default -cation
F23.00~
Reserved
F23.17
F24-Reserved Parameter Group 6
Function
code
F24.00~
F24.13
Name Set range
Reserved
Min.
Factory
unit
default
F25-User Definition Display Parameter Group
Function
code
F25.00 User function code 1 F00.00~F25.xx 0.01 25.00 ○
F25.01 User function code 2 F00.00~F25.xx 0.01 25.00 ○
F25.02 User function code 3 F00.00~F25.xx 0.01 25.00 ○
F25.03 User function code 4 F00.00~F25.xx 0.01 25.00 ○
F25.04 User function code 5 F00.00~F25.xx 0.01 25.00 ○
F25.05 User function code 6 F00.00~F25.xx 0.01 25.00 ○
F25.06 User function code 7 F00.00~F25.xx 0.01 25.00 ○
F25.07 User function code 8 F00.00~F25.xx 0.01 25.00 ○
F25.08 User function code 9 F00.00~F25.xx 0.01 25.00 ○
F25.09 User function code 10 F00.00~F25.xx 0.01 25.00 ○
F25.10 User function code 11 F00.00~F25.xx 0.01 25.00 ○
F25.11 User function code 12 F00.00~F25.xx 0.01 25.00 ○
F25.12 User function code 13 F00.00~F25.xx 0.01 25.00 ○
F25.13 User function code 14 F00.00~F25.xx 0.01 25.00 ○
F25.14 User function code 15 F00.00~F25.xx 0.01 25.00 ○
F25.15 User function code 16 F00.00~F25.xx 0.01 25.00 ○
F25.16 User function code 17 F00.00~F25.xx 0.01 25.00 ○
F25.17 User function code 18 F00.00~F25.xx 0.01 25.00 ○
F25.18 User function code 19 F00.00~F25.xx 0.01 25.00 ○
F25.19 User function code 20 F00.00~F25.xx 0.01 25.00 ○
F25.20 User function code 21 F00.00~F25.xx 0.01 25.00 ○
F25.21 User function code 22 F00.00~F25.xx 0.01 25.00 ○
F25.22 User function code 23 F00.00~F25.xx 0.01 25.00 ○
F25.23 User function code 24 F00.00~F25.xx 0.01 25.00 ○
F25.24 User function code 25 F00.00~F25.xx 0.01 25.00 ○
F25.25 User function code 26 F00.00~F25.xx 0.01 25.00 ○
F25.26 User function code 27 F00.00~F25.xx 0.01 25.00 ○
F25.27 User function code 28 F00.00~F25.xx 0.01 25.00 ○
F25.28 User function code 29 F00.00~F25.xx 0.01 25.00 ○
F25.29 User function code 30 F00.00~F25.xx 0.01 25.00 ○
Name Set range
Min.
unit
Factory
default
Modifi
-cation
Modifi
-cation
72
5 Function parameter schedule graph
Function
code
F26.00 The last fault record 0:no fault
F26.01 The last two fault records Same as above 1 0 *
F26.02 The last three fault records Same as above 1 0 *
F26.03 The last four fault records Same as above 1 0 *
F26.04 Setup frequency at the last one
F26.05 Output frequency at the last
F26.06 Output current at the last one
F26.07 DC bus voltage at the last one
F26.08 Module temperature at the last 0~125℃ 1℃ 0℃ *
Name Set range
1:overcurrent at acceleration
2:overcurrent at deceleration
3:overcurrent at constant speed
4:overvoltage at acceleration
5:overvoltage at deceleration
6:overvoltage at constant speed
7:overvoltage at motor halt
8:undervoltage at run
9:drive overload protection
10:motor overload protection
11:motor under load protection
12:input phase loss
13:output phase loss
14:inverter module protection
15:short circuit to earth at run
16:short circuit to earth when power on
17:drive overheat
18:external device fault
19:current detect circuit fault
20:external interference
21:internal interference—main clock etc
22:PID provide lost
23:PID feedback lost
24:PID error value abnormal
25:terminal protection activate
26:communication fault
27~29:reserve
30:EEROM read-write error
31:temperature detection disconnection
32:auto-tunning fault
33:contactor abnormal
34:factory fault 1
35:factory fault 2
36:reserved
37:coder broke line
38:over speed protection
39:speed deviate too large protection
40:Z purse missing fault
41:Analog channel broke line protection
42~50: Reserved
fault
one fault
fault
fault
0.00Hz~upper limit frequency 0.01Hz 0 *
0.00Hz~upper limit frequency 0.01Hz 0 *
0.0~6553.5A 0.1A 0.0A *
0.0~6553.5V 0.1V 0.0V *
Min.
Factory
default
Modifi
-cation
unit
1 0 *
73
F26-Fault Record Function Parameter Group

5 Function parameter schedule graph
p
~
one fault
F26.09 Input terminal status at the last
one fault
F26.10 Accumulated run time at the
last one fault
F26.11 Setup frequency at the last two
fault
F26.12 Output frequency at the last
two fault
F26.13 Output current at the last two
fault
F26.14 DC bus voltage at the last two
fault
F26.1 5 Module temperature at the last
two fault
F26.16 Input terminal status at the last
two fault
F26.17 Accumulated run time at the
last two fault
0 *
0~65535h 1h 0 *
0.00Hz~upper limit frequency 0.01Hz 0.00Hz *
0.00Hz~upper limit frequency 0.01Hz 0.00Hz *
0.0~6553.5A 0.1A 0.0A *
0.0~6553.5V 0.1V 0.0V *
0~125℃ 1℃ 0℃ *
0 *
0~65535min 1min 0min *
F27-Password and Manufacturer Function Parameter Group
Function
code
F27.00 User password 00000~65535 1 00000 ○
F27.01 Manufacturer
Name Set range
00000
assword
65535
Min.
Factory
unit
default
1 00000 ○
Modifi
cation
C-Monitor Function Parameter Group
Function
code
C-00
C-01
C-02
C-03
C-04
C-05
Name Set range
Display the parameter of
F00.01, F00.07 definition
Display the parameter of
F00.02, F00.08 definition
Display the parameter of
F00.03, F00.09 definition
Display the parameter of
F00.04, F00.10 definition
Display the parameter of
F00.05, F00.11 definition
Display the parameter of
F00.06, F00.12 definition
Min.
Factory
default
Modifi
-cation
unit
74

5 Function parameter schedule graph
(1) corresponding relationship of input terminal status as below:
Reserved
Reserved
Reserved
X7 terminal status
terminal status
X6
terminal status
X5
terminal status
X1
terminal status
X2
terminal status
X3
X4
terminal status
: terminal input invalid
:
terminal input valid
(2) Corresponding relationship of standard output terminal status as below:
Reserved
Reserved
Reserved
Reserved
Reserved
RLY terminal status
Y1 terminal status
Y2 terminal status
Y3 Reserved
Y4 Reserved
: terminal input invalid
: terminal input valid
(3) Corresponding relationship of communication virtual input terminal status as below:
Reserved
Reserved
CX8 terminal status
CX7 terminal status
CX6 terminal status
CX5 terminal status
CX1 terminal status
CX2 terminal status
CX3 terminal status
CX4 terminal status
: terminal input invalid
: terminal input valid
75

5 Function parameter schedule graph
(4) Drive status:
BIT0:1=DC bus voltage setup
BIT1:1=common run command valid
BIT2:1=jog run command valid
BIT3:1=drive run period
BIT4:1=current run direction to reverse
BIT5:1=run command direction to reverse
BIT6:1=deceleration brake period
BIT7:1=motor acceleration period
BIT8:1=motor deceleration period
BIT9:1=drive alarm
BIT10:1=drive fault
BIT11:1=current limited period
BIT12:1=fault self-recovery period
BIT13:1=self-adjusting period
BIT14:1=free halt status
BIT15:1=speed tracking start
76

6 Troubleshooting
6 Troubleshooting
6.1 Failure and countermeasure
Possible failure types in EN630/EN650A are shown in Table 6-1, the fault types
including fault and alarm. Such as if inverter fault display E-XX , while the
corresponding alarm is displayed in A-XX . Once the inverter failure , fault types are
stored in the F26 fault recording parameter group, and if alarm, alarm status has
been revealed, until the alarm source release, alarm status are not logged to the F26
parameter group. Some failure code is reserved for intelligent automatic diagnosis
function which will be executed continuously in future. When failure takes place in
the inverter, the user should check according to note of this table first and record
failure phenomena detailedly. Please contact our after-sale service and technical
support Department or agent in your local place when technical service is needed.
Table 6-1 Failure type and the countermeasure
Failure
Failure type Possible reason Countermeasure
code
Accelerating time is too short Prolong accelerating time
E-01
E-02
Overcurrent during
accelerating
process
Overcurrent during
decelerating
process
Improper V/F curve
Restart rotating motor Set speed checking restart function
Low power source voltage Check input power supply
Too small power of the
inverter
Output phase lose under vector
control
Decelerating time is too short Prolong decelerating time
Have potential energy load or big
inertia load
Power of inverter is a bit small Choose inverter with higher power
Adjust V/F curve setting, adjust
manual torque boost or change to
automatic torque boost
Choose inverter with higher power
Check whether the motor wiring is in
good condition
Increase braking power of external
energy consumption braking
subassembly
77

6 Troubleshooting
y
78
E-03
E-04
E-05
E-06
E-07
E-08
E-09
Overcurrent during
constant speed
process
Overvoltage
during accelerating
process
Overvoltage during
decelerating
process
Overvoltage during
constant speed
process
Overvoltage when
stopped
Low-voltage when
running
Inverter overload
protection
Load change suddenly or have
unwonted phenomena
Acc/Dec. time is set too short
Low power source voltage Check input power supply
Power of inverter is a bit small Choose inverter with higher power
Unwonted input voltage Check input power supply
Acc time is set too short Prolong accelerating time properly
Restart rotating motor Set speed checking restart function
Decelerating time is too short Prolong decelerating time
Have potential energy load or big
inertia load
Unwonted input voltage Check input power supply
Acc./Dec. time is set too short
Input voltage change
abnormally
Load inertia is a bit big
Unwonted input voltage
Input voltage is too low Check the input voltage
Acc time is set to too short Prolong accelerating time
DC braking is too big
Improper V/F curve Adjust V/F curve and torque boost
Restart rotating motor Set speed checking restart function
Check or reduce break of the load
Prolong accelerating decelerating time
properly
Increase braking power of external
energy consumption braking
subassembly
Prolong accelerating decelerating
time properly
Assemble input reactor
Use energy consumption
subassembly
Check input power suppl
service
Reduce DC braking
Current, prolong braking time
or look for

E-10
g
g
p
p
g
(A-10)
Motor overload
protection
6 Troubleshooting
Power source voltage is too low Check power source voltage
Load is too big Choose inverter with higher power
Improper V/F curve Adjust V/F curve and torque boost
Power source voltage is too low check power source voltage
General motor run at low
speed with big load
Motor overload protection factor
set incorrectly
Can choose frequency conversion
motor for long time low speed run
to set motor overload protection
factor correctly
E-11
(A-11)
E-12
E-13
E-14
Motor under-load
protection
The input phase
lose
The output phase
lose
Inverting module
protection
Motor blocked up or load change
too suddenly and quickly
The operatin
less than under-load threshold
load divorced from motor
The threesupply is abnormal
Power supply board anomaly Look for service from manufacturer or
The control board anomaly Look for service from manufacturer or
The cable from inverter to motor
anomaly
When the motor runs inverter
three-phase output
unbalanced
Power supply board anomaly Look for service from manufacturer or
The control board anomaly Look for service from manufacturer or
Transient overcurrent of the
inverter
earthin
phase
Air-path blocked or fan damaged To clear air-path or replace the fan
current of inverter
hase input power
hase to phase short circuit or
short circuit of output 3
Check the load
Confirm whether the parameters
F19.08, F19.09 setting are reasonable
Checkin
whether the load divorced
from motor
Check the three-phase input power
line is off or poor contact
agent
agent
Checking the cable
Check whether the motor
three-phase winding is balance
agent
agent
Refer to countermeasure for
overcurrent
wiring again
79

6 Troubleshooting
g
g
g
g
g
Short circuit to
E-15
ground when
operation
Short circuit to
E-16
ground when
power on
E-17
Inverter overheat
(A-17)
Ambient temperature is too high Lower ambient temperature
Connecting wire or insert on
control board loose
Unwonted current wave caused
by missing output phase etc.
Assistant power supply damaged
and drive voltage lacking
Unwonted control board
Motor short circuit to ground The replacement of cable or motor
Hall component is damaged or
the hall wirin
current detection circuit is
abnormal
Motor short circuit to ground Change the cable or motor
The power supplier of the
inverter and the motor wirin
reversed
Hall component is damaged or
the hall wiring is poor
Duct blockage
The ambient temperature is too
high
Fan damage Change new one
is poor or the
Check and connect the wire again
Check wiring
Look for service from manufacturer or
agent
Look for service from manufacturer or
agent
Look for service from manufacturer or
agent
are
Change the cable or motor wiring
Look for service from manufacturer or
agent
or to improve the ventilation
Cleanin
duct
To improve the ventilation
conditions, decreasin
frequency
the carrier
80
E-18
(A-18)
E-19
External device
failure
Current detecting
circuit failure
External fault emergency stop
terminal closed
Sudden stop terminal for external
failure closed
Connectin
wire or insert on
control board loose
Assistant power supply damaged
Hall component damaged
Unwonted amplifying circuit
External fault disconnect after external
fault terminal
Open external failure terminal after
external failure is settled
Check and connect the wire again
Look for service from manufacturer or
agent
Look for service from manufacturer or
agent
Look for service from manufacturer
or agent

6 Troubleshooting
p
g
g
y
g
E-22(A-22) PID Given loss
External
E-20
E-21
interference failure
External
interference failure
External disturbance serious
External disturbance serious
PID
iven loss threshold setting
is not reasonable
External given disconnection Check external given wiring
The control board anomaly
PID feedback loss threshold
E-23
(A-23)
PID feedback loss
setting is not reasonable
Feedback signal
disconnection
The control board anomaly
PID error abnormal detection
E-24
(A-24)
PID error
amount abnormal
threshold settin
reasonable
The control board anomaly
Start terminal
E-25
protection
Terminal command effective
when power on .
Baud rate set improperly set Baud rate properly
Serial port communication error
E-26
(A-26)
Communication
failure
Failure warning parameter set
improperly
Upper device doesn’t work
E-27
~
Reserved
E-29
2
E
PROM read
E-30
(A-30)
E-31
and write
wrongly
Temperature
detecting
Mistake take place when read or
write control parameter
Temperature sensor fault
is not
Press "STOP/RESET" button to reset
or add external power supply filter
from power input side
Power off and restart, if the failure
ersists, seek the manufacturer or
dealer service
To reset the relevant parameters
Look for service from manufacturer or
agent
To reset the relevant parameters
Check external feedback signal
wiring
Look for service from manufacturer or
agent
To reset the relevant parameters
Look for service from manufacturer or
agent
Check the external input terminal state
Press “STOP/RESET” ke
look for service
to reset,
Modify F05.04, F05.05
Check if upper device work and wirin
correct
Reset by pressing “STOP/RESET”
Look for service from manufacturer
is
or agent
Look for service from manufacturer or
agent
81

6 Troubleshooting
g
y
y
g
g
y
y
disconnection The temperature detection circuit
E-32 Self tuning failure
E-33
Contactor anomaly
(A-33)
E-34 The fault 1 Debugging use in factory
E-35 The fault 2 Debugging use in factory
E-36
Reserved
(A-36)
Encoder
E-37
disconnection
Over speed
E-38
protection
Large speed
E-39
deviation
protection
Fault of Z pulse
E-40
loses
Analog channel
E-41
disconnection
E-42
~
Reserved
E-50
The main and
Auxiliary given
A-51
frequency channel
exclusiveness
alarm
anomaly
Parameter settin
to the motor nameplate
current anomaly when tuning Select inverter match the motor
Motor wiring error Check the motor three-phase wiring
Power board anomaly
Contactor anomaly Replace contactor
Damaged encoder or poor wiring Check the wiring or the encoder
Short accelerating time Prolong the accelerating time
Low inverter power Select higher power inverter
Over speed detect parameter
F19.39 and F19.40 is set
improperly
Acceleration/deceleration time is
too short
Low inverter power Select higher power inverter
Over velocity misalignment,
Parameter
F19.41 and F19.42 is set
improperly
Z si
nal wire of motor encoder is
unconnected or loose
AI1 or AI2 detection of the
physical quantity is not within a
reasonable ran
circuit bad contact
Parameter setting error
e, or AI1 or AI2
not according
Look for service from manufacturer or
agent
set parameter correctly according to
the motor nameplate
Look for service from manufacturer or
agent
Set the parameter properl
to the situation
Prolong the acceleration time
Set the parameter properl
to the situation
Check the Z signal wire of motor
encoder
control the physical
Reasonabl
quantities measured b
check the wiring of AI1 or AI2.
F01.00 and F01.03 cannot be set to the
same channel (9: terminal encoder
given except)
according
according
AI1 or AI2,
82

6 Troubleshooting
Terminal function
A-52
exclusiveness
alarm
A-53 Run limit alarm Reach limited running time Please contact your supplier
LOCH1. Keypad lock Keypad buttons lock Check chapter 4.2.6
Terminal function parameters
setting repeatedly
Check the terminal function settings
(1)Alarm fault of E-16, the inverter must be power off for reset.
(2)For the faults of over-current, short-circuit to ground while
running, inverter can reset after 2s delay
Note
6.2 Failure record lookup
This series inverter can record latest 4 failure code and inverter run parameter of
the last 2 times failure, to search these information can redound to finding out reason of
the failure.
Failure information is all stored in F26 group parameter,please enter into F26
group parameter to see about information by referring to keypad operation method.
Code Content Code Content
F26.00
F26.01
F26.02
F26.03
F26.04
F26.05
F26.06
F26.07
F26.08
Previous one failure record
Previous two failure record
Previous three failure record
Previous four failure record
Set freq. at previous failure
Output freq. at previous failure
Output current. at previous failure
DC bus volt. at previous failure F26.16 Input terminal state of previous 2
Module temp. at previous failure F26.17 Total running time of previous 2
F26.09
F26.10
F26.11
F26.12
F26.13
F26.14
F26.15
Input terminal state at previous
failure
Total running time at previous
failure
Set freq. at previous 2 failure
Output freq. at previous 2 failure
Output current. at previous 2 failure
DC bus volt. at previous 2 failure
Module temp. at previous 2 failure
83

6 Troubleshooting
6.3 Failure reset
(1) Before reset you must find out reason of failure downright and
eliminate it, otherwise may cause permanent damage to the inverter.
(2) If can’t reset or failure takes place again after resetting, should look
for reason and continuous resetting will damage the inverter.
!
(3) Reset should take place 5 minutes later after overload, overheat
protection action.
(4) For the failure of E-14, the reset is invalid, the motor wiring should
be checked after power off, and restart the inverter.
(5) When there is a fault of E-16 after power on, do not directly run the
inverter after reset, and need to check whether the input, out wiring are
reversed.
To resume normal running when failure takes place in the inverter, you can
choose following any kind of operation:
(1)After you set any terminal of X1~X8 to be inputted by external RESET, it
will be disconnected after connected to COM.
(2)When failure code is displayed, press key after restoration is
confirmed.
(3)Communication reset. Please refer to annex description.
(4)Cut off power supply.
STOP
RESET
6.4 Alarm reset
When an alarm occurs, must eliminate alarm source which cause alarm,
otherwise the alarm can not be eliminated, also cannot be reset by reset button.
84

7 Maintenance
7 Maintenance
7.1 Routine maintenance
When you use this series you must assemble and operate it
according to demand listed in this “service manual” strictly. During
run state, temperature, humidity, vibration and aging parts will affect it,
which may cause failure of the inverter. To avoid this, it is
recommended to perform routine inspections and maintenance.
Table 7-1 Daily inspection and maintenance items
Period
Daily Periodic
Daily cleaning:
√
√ Check the air duct, and regularly clean.
√ Check whether the screws is loose
√ Check whether the inverter is corrode
√ Whether inverter installation environment changes
√ Whether the inverter cooling fan is working properly
√ Whether the inverter is overheating
√ When motor running whether voice abnormally changes.
√ Whether occur abnormal vibration when motor running
√ Check whether wiring terminals have arc trace
√ The main circuit insulation test
(1)Inverter should be maintained in a clean state
(2)Clean up the dust on the surface of inverter, prevent the
dust into the inverter internal (especially metal dust).
Recommend to inspect with following instrument:
Input voltage: electric voltmeter ; output voltage: rectifying
voltmeter;input output current: pincers ammeter
Inspection item
85

7 Maintenance
7.2 Inspection and replacement of damageable parts
Some component parts in the inverter will be abraded or bear
descending performance for long-term usage,to assure that the
inverter can run stably and reliably, it is recommended to perform
defending maintenance and replace corresponding parts if necessary.
(1) Cooling fan
Abnormal noise, even oscillation may take place if the fan have
wearing bearing, aging blade, here replacement of the fan should be
considered.
(2) Filter electrolyte capacitance
When frequent-changing load causes increasing pulsating current
and aging electrolyte under high ambient temperature, the electrolyte
capacitance may be damaged and here should replace it.
7.3 Repair guarantee
(1) We provide the free maintenance within warranty time if any
failure or damage under normal usage, the warranty time can be seen
in the warranty card, we will charge some when exceed warranty time.
(2) We will take some upkeep if one of following situations takes
place within period of repair guarantee.
a. If did not use the inverter according to《service manual》strictly
or did not use it under ambient demanded in《service manual》, which
cause failure.
b. Failure caused by applying the inverter to non-normal
function;
c. Failure caused by self-repair, refit which is not already
allowed;
d. Damage caused by bad keeping, falling down from high place
or other extrinsic factor after purchasing the inverter;
e. Failure caused by natural disaster or its reason such as
86
7 Maintenance
p
unwonted voltage, thunderbolt, water fog, fire, salt corroding, gas
corroding, earthquake and storm etc.;
f. Make bold to tear up product logo (such as: nameplate etc.);
Body serial number don’t accord with that in repair guarantee card.
(3) We calculate service fee based on actual cost, which is subject to
contract if any.
(4) You can contact the agent and also our company directly if you
have questions. After repair guarantee period, we shall also provide
lifetime charged repair service for our products.
Our company will also provide lifetime repair service with fee for
inverter which is not within
Note
eriod of repair guarantee.
7.4 Storage
The user must pay attention to following points for temporary
storage and long-term storage after purchasing the inverter:
(1) Avoid storing the inverter in high temperature, moist place
and place of dust, metal powder and assure good ventilation.
(2) Longtime storage will cause low quality of electrolyte
capacitance, so must assure that it’s electrified for one time within 1
year and electrification time is not shorter than 1 hour and input
voltage must be increased to rated value gradually by voltage
regulator of 250w, meanwhile the inverter should be cut off from the
motor.
87

Appendix A EN650A Mini multi-function PMSM Inverter
Appendix A EN650A Mini multi-function PMSM Inverter
A.1 Symbol description
× ---- parameter can’t be changed in process of running
○ ---- parameter can be changed in process of running
* ---- read-only parameter, unchangeable
A.2 Function parameter schedule graph
F00-System Parameter Group
Function
code
F00.00 Parameter group display
F00.01 C-00 display parameter
Name Set range
control
selection when
operation
88
0: Basic list mode (only display F00~F03
basic control parameter group and F26
fault record parameter group.)
1: Middle list mode. Display all parameter
except for extension: virtual and reserve
parameter group.
2: Senior list mode. All parameter display.
3: User list mode. Display parameter
defined by user: and monitor parameter:
F00.00 display all the time.
Note: Under mode 1, some related
parameters would be hidden according to
motor and control mode.
0:main setup frequency(0.01Hz)
1:auxiliary setup frequency(0.01Hz)
2:setup frequency(0.01Hz)
3:output frequency(0.01Hz)
4:output current(0.1A)
5:output voltage(1V)
6:DC bus voltage(0.1V)
7:motor speed(1 circle/min)
8:motor line velocity(1 circle/min)
9:inverter temperature(1℃)
10:run time already this time(0.1min)
11:current accumulate run time(1h)
12:current accumulate power-on time(1h)
13:inverter status
14:input terminal status
15:output terminal status(Standard)
16:extension output terminal status
Min.
unit
1 0 ○
1 3 ○
Factory
Default
Modifi
-cation

Appendix A EN650A Mini multi-function PMSM Inverter
17:extension input terminal status
18:communication virtual input terminal
status
19:internal virtual input node status
20:analog input AI1(after checkout) (0.01V
/ 0.01mA)
21:analog input AI2(after checkout) (0.01V
/ 0.01mA)
22:extension analog input EAI1(after
checkout) (0.01V / 0.01mA)
23:extension analog input EAI2(after
checkout) (0.01V / 0.01mA)
24:analog AO1 output(after checkout)
(0.01V /0.01mA)
25:analog AO2 output(after checkout)
(0.01V /0.01mA)
26:extension analog EAO1 output (0.01V
/0.01mA)
27: extension analog EAO2 output (0.01V
/0.01mA)
28:external pulse input frequency(before
checkout)(1Hz)
29:Reserved
30:process PID provide(0.01V)
31:process PID feedback(0.01V)
32:process PID deviation(0.01V)
33:process PID output(0.01Hz)
34: Simple PLC current segment No.
35: External multi-speed current segment
No.
36:Reserved
37:Reserved
38:Reserved
39:current length(1M)
40:accumulate length(1M)
41:current internal count value
42:current internal time value(0.1s)
43:run command setup channel(0:keyboard
1:terminal 2:communication)
44:main frequency provide channel
45:auxiliary frequency provide channel
46:rated current(0.1A)
47:rated voltage(1V)
48:rated power(0.1KW)
49:Inverter provision torque(percentage of
89

Appendix A EN650A Mini multi-function PMSM Inverter
rated torque with direction)
50:Inverter output torque(1 N.M)
F00.02 C-01 display parameter
selection when
operation
F00.03 C-02 display parameter
selection when
operation
F00.04 C-03 display parameter
selection when
operation
F00.05 C-04 display parameter
selection when
operation
F00.06 C-05 display parameter
selection when
operation
F00.07 C-00 display parameter
selection when
stop
F00.08 C-01 display parameter
selection when stop
F00.09 C-02 display parameter
selection when stop
F00.10 C-03 display parameter
selection when stop
F00.11 C-04 display parameter
selection when stop
F00.12 C-05 display parameter
selection when stop
F00.13 Power-on default
monitor parameter
selection
51~65:Reserved
Same as above 1 2 ○
Same as above 1 4 ○
Same as above 1 5 ○
Same as above 1 6 ○
Same as above 1 9 ○
Same as above 1 2 ○
Same as above 1 6 ○
Same as above 1 48 ○
Same as above 1 14 ○
Same as above 1 20 ○
Same as above 1 9 ○
0~5 1 0 ○
90

F00.14 Parameter operation
g
p
y
y
b
b
b
jog
y
g
control
F00.15 Button function
selection
Appendix A EN650A Mini multi-function PMSM Inverter
Units digit: Parameter modification
operations
0:All parameters are allowed to be
modified
1:Except current parameter, all other
parameters are not allowed to modify the
2:ExceptF01.01,F01.04and current
parameter, all other parameters are not
allowed to be modified
Tens digit: Reset to factory defaults
0: No action.
1:All parameters return to default.(not
include fault record parameter
group) parameter).
2:Except for motor parameter: all
arameters return to default.(not include
F15 and F26 group parameter).
3:Extension parameter return to
F21~F24 group parameter
default.(onl
return to default).
4: Virtual parameter return to default.(onl
F20 group parameter return to default).
5:Fault record return to default.(only fault
record parameter group(F26 group)
parameter return to default)
Hundreds digit: Key operation
0:All locked
1:Except button: the others locked
2:Except 、
locked
3:Except 、
locked
4:Except 、
locked
Units digit: panel button selection
0:Reversal command action button
1:Jog action button
Tens digit: multi-function button
function selection
0: Invalid.
1: Jog run. multi-function button as
button, run direction decided b
F01.16’s .
2: For/rev switchin
roup(F26
utton: the others
utton: the others
utton: the others
unit bit of
. press this button to
1 000 ×
1 0001 ○
run
91

Appendix A EN650A Mini multi-function PMSM Inverter
p
g
g
change the run direction when run: then
ress the same button change to another
direction.
3: Free stop. setup free stop function and
stop mode F02.11 the same function with 1
Jog run.
4: Switchin
mode as the setup order of F00.16.
5:Forward/Reverse Torque Switching
6~9:Reserved
Hundreds di
control
0:Keyboard button invalid
1:Keyboard button valid
Thousands digit: communication run
command control
0:Keyboard button invalid
1:Keyboard button valid
F00.16 Multi-function key run
command channel
switching order
selection
F00.17 Motor speed
display coefficient
F00.18 Line speed
display coefficient
F00.19 PG card selection 0:invalid
0: Keyboard control→ terminal
control→ communication control
1: Keyboard control←→terminal control
2: Keyboard control←→communication
control
3: Terminal control←→communication
Control
0.1~999.9% 0.1% 100.0% ○
0.1~999.9% 0.1% 1.0% ○
1:Reserved
2:Reserved
3:incremental encoder (F08.24 can not be
91) (Terminal X6,X7 relating to A,B
terminal X5relating to Z)
4~10:Reserved
to run command provide
it: terminal run command
1 0 ○
1 0 ×
92

Appendix A EN650A Mini multi-function PMSM Inverter
y
F00.20 Analog input
terminal configuration
F00.21 Analog output
terminal configuration
F00.22 Y output terminal
configuration
F00.23 Reserved
F00.24 Motor control mode
F00.25 Motor type selection 0:Asynchronous motor ( Speed control
F00.26 Reserved
F00.27 Reserved
Units digit:AI1 configuration
0:0~10V input
1:4~20mA input
Tens digit: AI2 configuration
0:-10~10V input
1:4~20mA input
Hundreds digit: Reserved
Thousands digit: Reserved
Units digit: AO1 configuration
0:0~10V output
1:4~20mA output
Tens digit: AO2 configuration
0:0~10V output
1:4~20mA output
Hundreds digit: Reserved
Thousands digit: Reserved
Units digit~ hundreds digit: reserved
Thousands digit: Y2 output configuration
0:Open-collector output
1:DO output
0:V/F Control mode (As
available)
1:Without PG vector control(PMSM and
asynchronous motor available)
2:With PG vector control(For PMSM)
mode)
1:MPSM(Speed control and torque control
mode)
nchronous motor
1 0000 ×
1 0000 ×
1 0000 ×
1 1 ×
1 1 ×
F01-Basic Run Function Parameter Group
Function
code
F01.00 Main frequency
Name Set range
input channel
selection
0: Operation keyboard digital setup
1: AI1 analog setup
2: AI2 analog setup
3:Terminal UP/DOWN adjusting setup
4: Communication provision.
5:Reserved
6:Reserved
Min.
Factory
unit
Default
1 0 ○
Modifi
-cation
93

Appendix A EN650A Mini multi-function PMSM Inverter
y
g
y
y
y
y
y
y
y
7:High speed pulse setup(Select matched function
for X7 terminal)
F01.01 Main frequency
digital setup
F01.02 Main frequency
digital control
F01.03 Auxiliary
frequenc
channel selection
F01.04 Auxiliary
frequency digital
setup
F01.05 Auxiliary
frequency digital
control
F01.06 Main and
auxiliary provide
calculating setup
8~14:Reserved
0.00Hz~upper limit frequency 0.01Hz 50.00Hz ○
Only when parameter F01.00=0:3:4 valid.
Units digit: power down reserve setup
0: Main frequency power down reserve.
1: Main frequency power down no reserve.
Tens digit: halt reserve setup
0:Halt main frequency hold
1:Halt main frequency recovery F01.01
0: Operation keyboard digital setup
input
1: AI1 analog setup
2: AI2 analog setup
3:Terminal UP/DOWN adjusting setup
4: Communication provision.
5:Reserved
6:Reserved
h speed pulse setup(Select matched function
7:Hi
for X7 terminal)
8~20:Reserved
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ○
Units digit: power down reserve setup
0: Auxiliary frequency power down reserve.
1:Auxiliary frequency power down no reserve.
Tens digit: halt reserve setup
0: Halt auxiliary frequency hold.
1:Halt auxiliary frequency recovery
parameter F01.04
0: Main frequenc
is main frequency).
1: Auxiliar
current is auxiliary frequency.)
2: Plus(polarit
frequency,complex frequency is zero).
3:Minus(polarit
auxiliary frequency,complex frequency is zero).
4: Multiplication (polarit
auxiliary frequency: complex frequency is zero).
5: Max (the max frequenc
absolute value).
6: Min (the min frequenc
(complex frequency of current
frequency (complex frequency of
oppose of complex and main
oppose of complex and
opposed of main and
of main and auxiliary
of main and auxiliary
94
1 00 ○
1 1 ○
1 11 ○
1 0 ○

y
y
F01.07 Auxiliary
g
y
g
frequency
provide
coefficient
F01.08 Coefficient after
complex of main
and auxiliary
frequency
F01.09 Auxiliary
frequency range
selection
F01.10 Auxiliary
frequency source
scope
F01.11 upper limit
frequency
F01.12 Low limit
frequency
F01.13 Low limit
frequency run
mode
F01.14 Sleep run
hysteresis
frequency
F01.15 Run command
channel selection
F01.16 Run direction
setup
Appendix A EN650A Mini multi-function PMSM Inverter
absolute value).
7:Selection no-zero value(auxiliar
negative ,main frequency prior ; auxiliar
negative,complex frequency is zero).
0.00~10.00 0.01 1.00 ○
0.00~10.00 0.01 1.00 ○
0:Relative upper limit frequency.
1:Relative main frequency.
0.00~1.00 0.01 1.00 ○
low limit frequency~600.00Hz 0.01Hz 50.00Hz ×
0.00Hz~upper limit frequency 0.01Hz 0.00Hz ×
0:As low limit frequency run.
1:As setting frequency run.
2:As zero frequency run.
3:Sleep: PWM clocked at sleep mode.
0.01Hz~upper limit frequency(This function can
be used to finish the sleep mode function,
realizing energy-savin
h
steresis width can avoid inverter starting
frequently in threshold)
0: Operation keyboard run control.
1:Terminal run command control
2: Communication run command control.
Units digit: Keyboard command for/rev
setup(only valid to keyboard inching command)
0:Forward
1:Reverse
Tens di
command channel,not include inching function)
0: Forward /reverse available.
1:Reverse not available( imposing on reverse,
stop as the halt mode).
2:Forward not available( imposing on forward,
operation process, and the
it: for/rev forbid(suitable for all
is not
is
1 0 ○
1 0 ×
0.01Hz 0.01Hz ○
1 0 ○
1 00 ○
95
 Loading...
Loading...