

Page 1
TECHNICKÝ MANUÁL
ŘÍDÍCÍ KARTA KROKOVÉHO MOTORU
SMC800 / SMC1500
Obj. č.: 96 77 85
Page 2
Obsah
Strana
1. Úvod ....................................................................................................................... 2
2. Hardware................................................................................................................ 3
2.1 Přehled.............................................................................................................. 3
2.2 Zdroj napětí....................................................................................................... 5
2.3 Připojení motoru................................................................................................ 6
2.4 Nastavení fázových proudů............................................................................... 7
2.5 Referenční spínač............................................................................................. 7
2.6 Volba zdvihového magnetu při provozu kreslícího zařízení .............................. 8
2.7 Nastavení řídící karty krokového motoru........................................................... 8
2.7.1 Připojení na počítač.................................................................................... 8
2.7.2 Připojení na další řídící přístroje................................................................. 8
3. Software ................................................................................................................. 8
3.1 Řídící software (ovladač) .................................................................................. 8
3.1.1 SMC_DRV1................................................................................................ 9
3.1.2 SMC_DRV2:............................................................................................. 13
3.1.3 SMC_DV2A: ............................................................................................. 14
3.2 Řídící software (ovladač) pro vyšší programovací jazyk ................................. 14
3.3 HPGL-převaděč .............................................................................................. 18
4. Datové rozhraní.................................................................................................... 19
4.1 Obsazení datového rozhraní........................................................................... 19
4.2 Popis datového rozhraní ................................................................................. 20
5. Technické údaje ................................................................................................... 21
2
1. ÚVOD
Řídící karta krokového motoru SMC800/SMC1500 slouží k nastavení bipolárních
krokových motorů v malém a středním rozsahu výkonu.
Nastavení karty může být provedeno různými počítači prostřednictvím interface
Centronics. Majitelé řídící karty krokového motoru SMC1500 s doplňkovou základní
deskou, mohou kartu provozovat i s jinými ovládacími přístroji.
Variabilní externí napájení proudem a kontinuálně nastavitelné fázové proudy
zaručují snadnou adaptaci na mnoho typů motorů.
Pro vpravení do teorie krokových motorů odkazujeme na následující literaturu:
Pohony krokových motorů
Franzis-Verlag GmbH (nakladatelství)
Autor: Prautzsch
Page 3
2. HARDWARE
2.1 Přehled
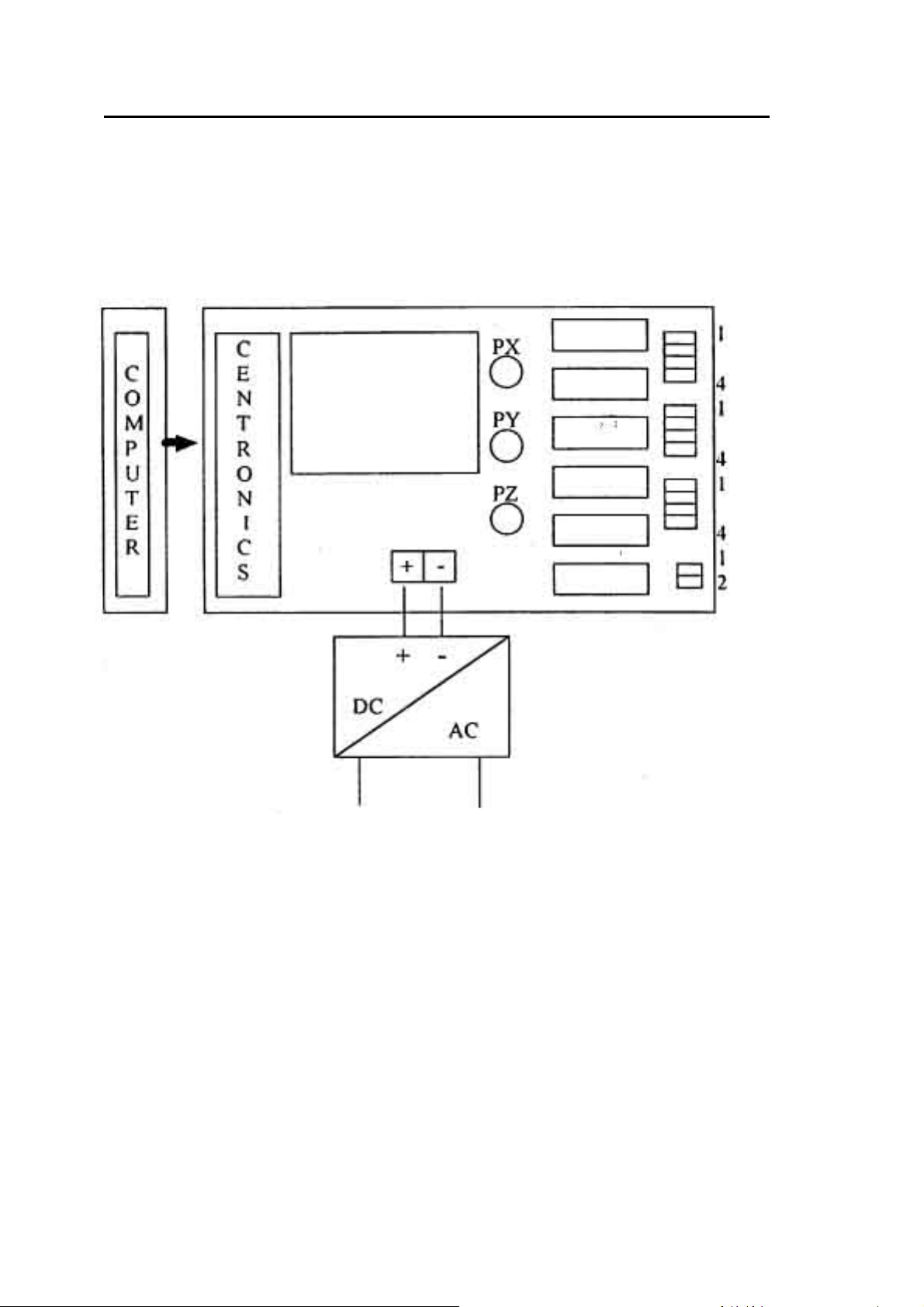
a) SMC800
3
Motor X
Motor Y
Motor Z
Zdvihový
magnet
Referenční
spínač
Page 4
4
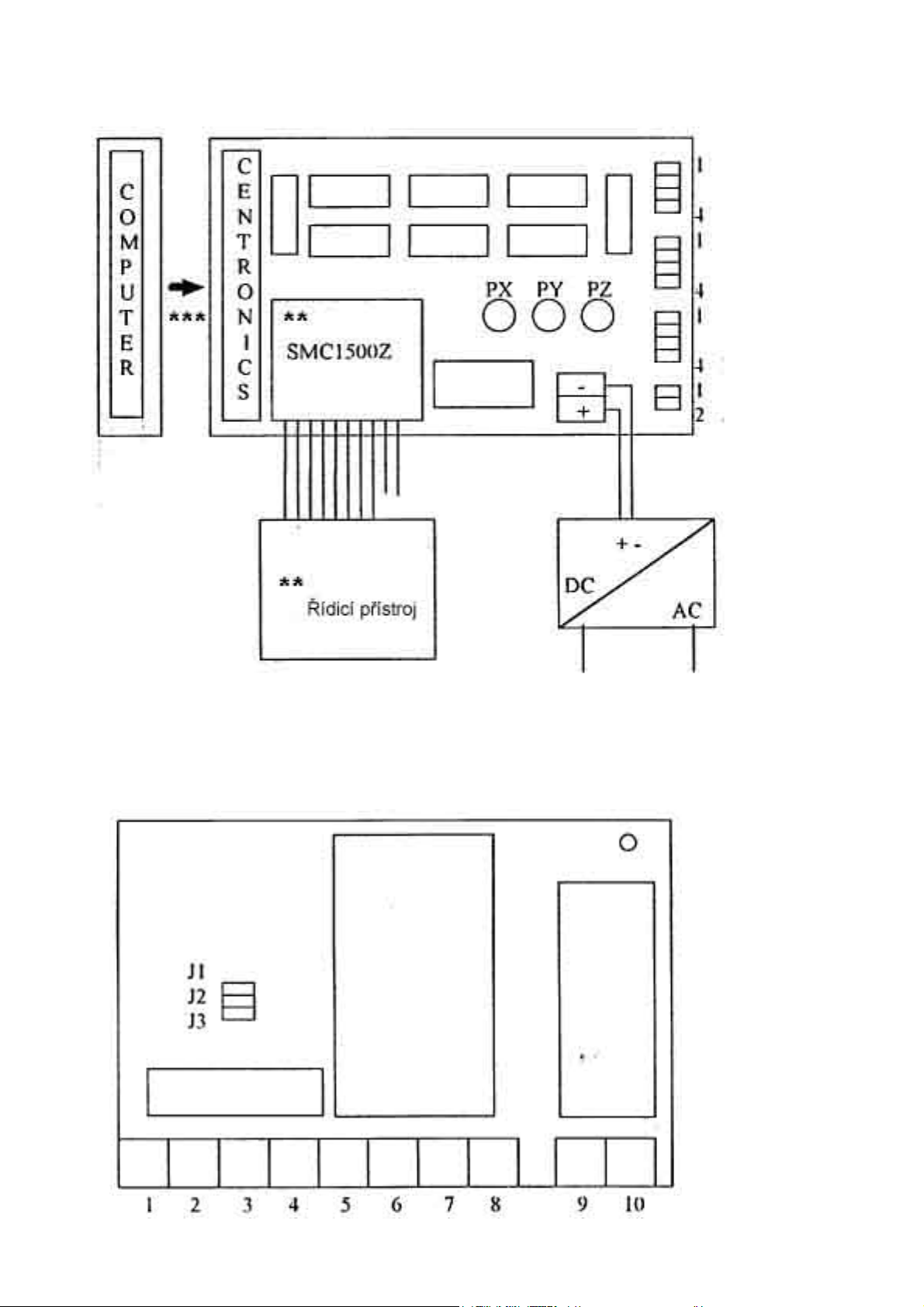
b) SMS1500
Motor X
Motor Y
Motor Z
Zdvihový
magnet
Referenční
spínač
** Pouze u SMC1500 s doplňkovou základní deskou SMC1500Z (tato deska
může být také bez problémů dodatečně vybavena).
*** Použít pouze jedno rozhraní (interface), buď Centronics
svorkovnice.
nebo
c) Doplňková základní deska SMC1500Z
Page 5
Obsazení svorkovnice:
1. Signálový impuls X-motor
2. Signál smyslu otáčení X-motor
3. Signálový impuls Y-motor
4. Signál smyslu otáčení Y-motor
5. Signálový impuls Z-motor
6. Signál smyslu otáčení Z-motor
7. Reléový přepínací kontakt
8. Země signálu
9. Přepínací kontakt připojení 1
10. Přepínací kontakt připojení 2
Je zapotřebí doplňková řídící deska SMC1500Z (možné pouze ve spojení s řídící
kartou krokového motoru SMC1500), když má být řídící karta krokového motoru
SMC1500 seřízena signálovým impulsem a směrovým signálem. Karta je vybavena
mikrořadičem PIC16C57 a poskytuje uživateli následující možnosti nastavení:
● Úplný nebo poloviční krokový provoz
● Vratný proud při zastavení motoru
Pro tento účel musí být připojeny jumper 1 (vodivá spojka) až jumper 3 jak je
následovně zobrazeno:
JI Vratný proud J2 J3
Poloviční cyklus ON 0% OFF OFF
Úplný cyklus OFF 20% ON OFF
60% OFF ON
Fázový proud je při zastavení motoru automaticky redukován na nastavenou
hodnotu. Všechny vstupní úrovně TTL a CMOS jsou kompatibilní a mohou
zpracovávat frekvence do 5 kHz. Vstupy impulsů a směru otáčení reagují na
stoupající čelo impulsu signálu.
Změna hladiny smyslu otáčení z 0 do 1 a naopak, má za následek změnu smyslu
otáčení motoru. Reléový přepínací kontakt je zapojen positivní hladinou (3-30 V) a
odpojen nulovou úrovní (0-0,8 V).
Změna nastavení bude účinná jen tehdy, když bude spínání po změně jumperu
krátkodobě odpojeno od zdroje napětí (reset) nebo již byla provedena změna ve
stavu bez napětí.
5
2.2 Zdroj napětí
K provozu řídící karty krokového motoru je zapotřebí externího stejnosměrného
zdroje napětí. Činitel zvlnění stejnosměrného napětí by neměl překročit 2 volty.
Pozor! U příliš vysokého napětí (U>30 V) může být karta poškozena.
Page 6
6
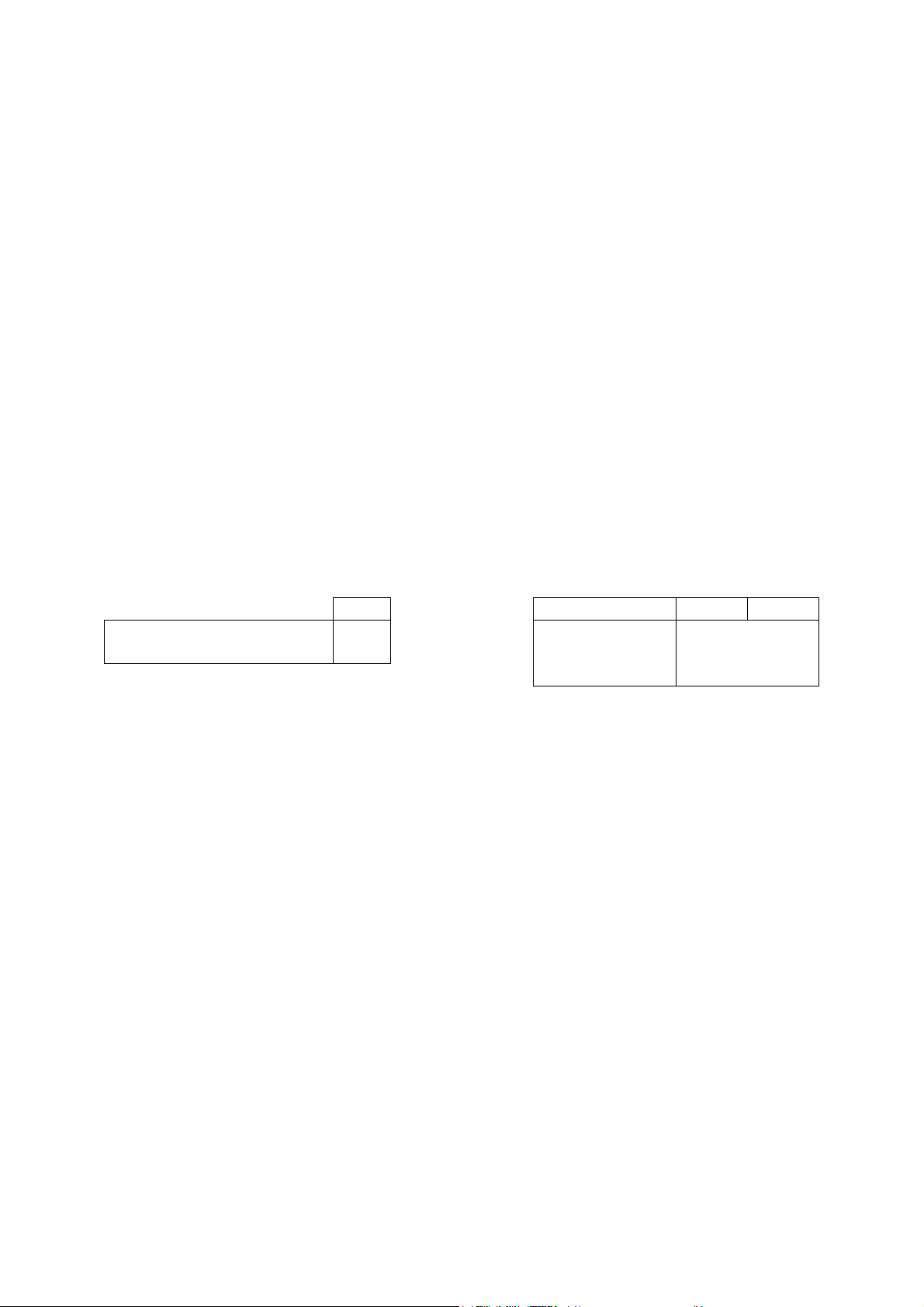
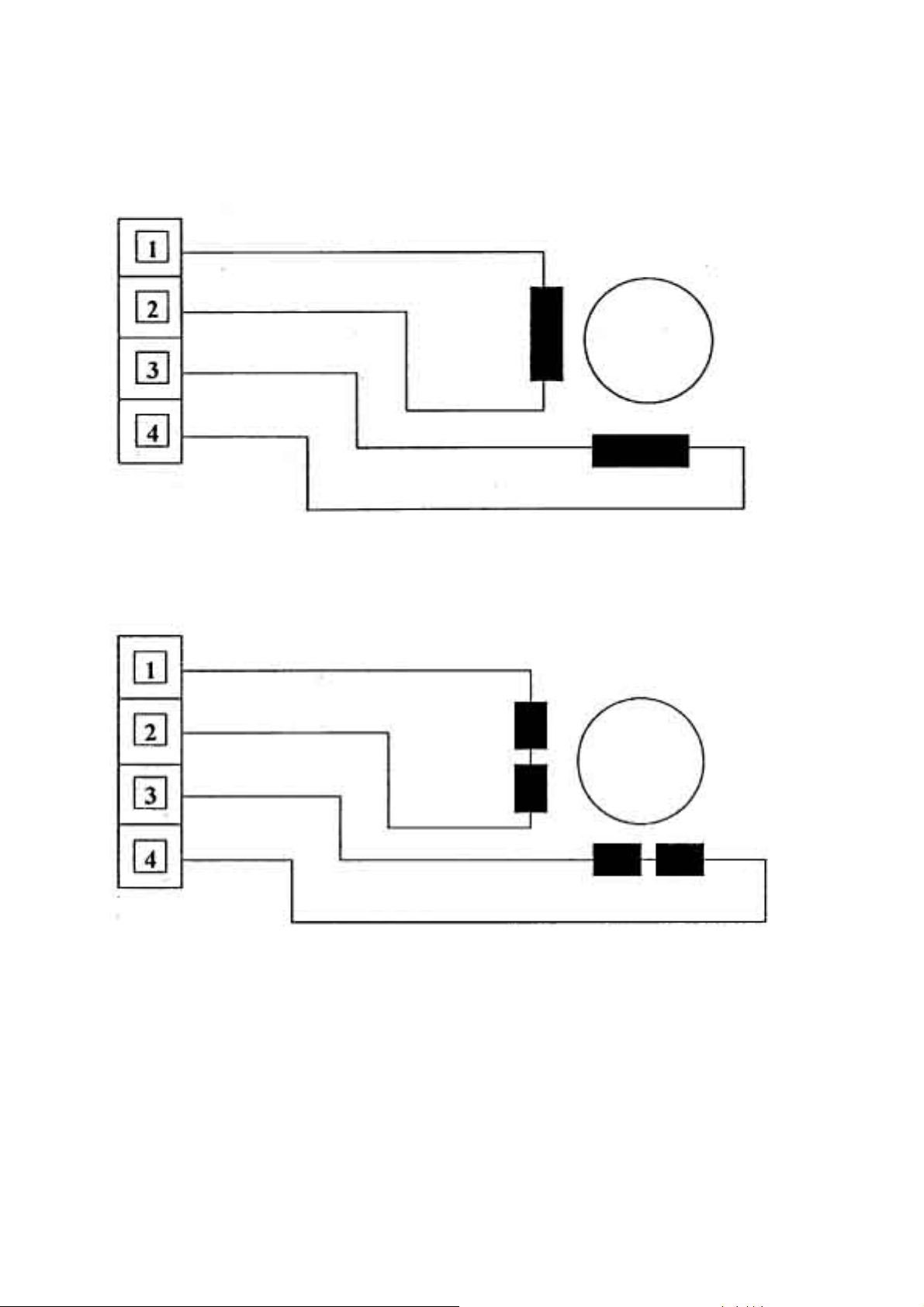
2.3 Připojení motoru
U 2-fázových krokových motorů je připojena příslušná fáze na svorkách 1-2 popř. 3-4
odpovídajícího výstupu motoru.
Pokud budou 4-fázové krokové motory připojeny na řídící kartu krokového motoru,
musí být sdruženy příslušné fáze.
Směr otáčení motorů
Směr otáčení připojených motorů může být záměnou přípojných vedení jednotlivých
fází obrácený.
Příklad:
2-fázový krokový motor:
fáze 2: svorka 3-4
fáze 1: svorka 1-2
Page 7

Záměnou obou přípojných drátů 1-2 bude dosaženo obrácení směru otáčení.
Stejného efektu se dosáhne záměnou přípojných drátů na svorkách 3-4.
7
2.4 Nastavení fázových proudů
Fázové proudy mohou být kontinuálně nastaveny v rozsahu od 5 mA do 800 mA
(SMC800) popř. od 5 mA do 1500 mA (SMC1500).
Celkový proud motoru se skládá z jednotlivých fázových proudů jako v následujícím
textu:
IM = I
Nastavení fázových proudů:
● Připojit motory na řídící kartu krokového motoru
● Přiložit externí napájecí napětí
● Velikost fázového proudu může být odvozena od referenčního napětí.
Referenční napětí je měřeno mezi středním přípojem příslušného dolaďovacího
potenciometru a kostrou (minusový pól napájecího napětí). Dolaďovacím
potenciometrem příslušné přiřazené fáze se musí tak dlouho otáčet, až je dosaženo
požadovaného fázového proudu příslušného následujícího vzorce:
IPh = V
* 0,084 (A) (SMC800)
Ref
Ph1
+ I
Ph2
= V
I
Ph
: fázový proud
I
Ph
: referenční napětí
V
Ref
Upozornění: Majitelé řídící karty krokového motoru SMC800 by měly dbát na to,
aby bylo u fázového proudu > 500 mA zajištěno dobré větrání stupňů výkonnosti
(eventl. použít ventilátor).
* 0,123 (A) (SMC1500)
Ref
2.5 Referenční spínač
Na určené svorce může být připojen referenční spínač. Dodaný software přitom
podporuje mechanické spínací kontakty.
Více referenčních spínačů (např. spínač na osu) musí být zapojeno paralelně. Pro
zpracování referenčního spínače viz.
kapitola 3.2.
Page 8

8
2.6 Volba zdvihového magnetu při provozu kreslícího
zařízení
U provozu kreslícího zařízení bude na Z-osu namísto motoru připojen zdvihový
magnet popř. relé na svorku 1-2.
Velikost napájecího napětí zdvihového magnetu se řídí podle napájecího napětí řídící
karty krokového motoru:
Příklad: Napájecí napětí řídící karty krokového motoru: 24 V DC
Ä Napájecí napětí zdvihového magnetu: 24 V DC
Maximální příkon nesmí překročit 800 mA (SMC800) popř. 1500 mA (SMC1500).
Pokud se použije silnější magnet, musí být zapojen přes relé. Pro relé platí potom
stejné předpoklady jako pro výše popsané zdvihové magnety.
2.7 Nastavení řídící karty krokového motoru
2.7.1 Připojení na počítač
Připojení řídící karty krokového motoru na počítač se provádí přes rozhraní
Centronics. K tomu může být použit, v obchodě běžný, standardní kabel pro tiskárnu.
2.7.2 Připojení na další řídící přístroje
Jen SMC1500 s doplňkovou základní deskou!
Je-li řídící karta krokového motoru SMC1500 vybavena doplňkovou základní deskou
SMC1500Z, může být podle volby nastavena počítačem nebo jiným řídícím
přístrojem (např. SPS, generátor kmitočtu atd.), který dodává signálový impuls a
směrový signál.
3. SOFTWARE
S řídícím softwarem, obsaženým v dodávce, se uživateli nabízí více možností pro
nastavení řídící karty krokových motorů.
3.1 Řídící software (ovladač)
Na přiložené disketě se nacházejí následující uvedené řídicí programy, které jsou
umístěny v různých adresářích.
Page 9

9
3.1.1 SMC_DRV1
Ovladač pro kartu SMC800 a SMC1500 (bez zasouvací základní desky SMC1500Z).
Nastavení karty je závislé na rychlosti počítače tak, že musí být volitelná výstupní
frekvence zjištěna cestou vyzkoušení.
K přímému nastavení řídící karty krokového motoru SMC800 popř. SMC1500 je
přiložen program SMC800.EXE. Softwarem jsou vytvořeny informace o impulsu,
směru a proudu s výstupem na kartu. Karta převádí tyto informace na příslušné
fázové proudy a tím vyvolává na připojených krokových motorech otáčivý pohyb.
Rychlost výstupních impulsů je závislá na rychlosti použitého počítače, tzn. čím je
počítač rychlejší, tím je rychlejší výstup informací o impulsu, směru a proudu. Proto je
zapotřebí přizpůsobit software počítači. Toto se děje v menu parametry systému.
Následně budou systémové parametry jednotlivě popsány.
Z-osa:
U Z-osy se rozlišují dva druhy nastavení:
● Nastavení v provozu kreslícího zařízení
Namísto motoru je nastaven zdvihový magnet. Musí být zapsána hodnota 32000
nebo –32000.
● Nastavení 3-osém provozu:
Bude nastaven krokový motor jako u osy X nebo Y. Může být zapsána hodnota
od -31999 do 31999 (= počet polovičních cyklů)
Referenční vzdálenost X:
Po stisknutí referenčního spínače provede motor pohyb o počet, zde zapsaných,
polovičních cyklů referenčního spínače. Hodnota může činit –31999 až 31999.
Referenční vzdálenost Y:
Pokud je Z-osa definována jako reléový výstup (kreslící pohyb). Potom není tato
hodnota významná. V opačném případě obdobně k referenční vzdálenosti X.
Startovní rampa:
Hodnotu
až 32000. Zanesená hodnota se chová opačně úměrně vůči frekvenci (velikost
startovní hodnoty znamená nízkou startovní frekvenci motoru). Velikost této hodnoty
je závislá na pracovní frekvenci mikroprocesoru použitého počítače.
Koncová rampa:
Hodnotu
10000. Zanesená hodnota se chová opačně úměrně vůči frekvenci (malá hodnota
startovní rampy
koncové rampy
určí náběhová frekvence krokového motoru. Může činit 1
určí pracovní kmitočet krokového motoru. Může činit 1 až
Page 10

znamená vysoký pracovní kmitočet motoru). Velikost této hodnoty je rovněž závislá
na pracovní frekvenci mikroprocesoru použitého počítače.
Strmost:
Pod
strmostí
více motor zrychluje a tak rychleji dosáhl svého pracovního kmitočtu. Mohou být
zadány hodnoty od 1 do 20.
Manuální rychlost:
Tato hodnota určuje rychlost při řízení prostřednictvím klávesnice. Mohou být
definovány hodnoty mezi 1 a 30.
Interface (rozhraní):
Tato hodnota určuje, jaké má být použito rozhraní – 1 nebo 2. Platné hodnoty jsou:
Systémové parametry budou uloženy tlačítkem F9. S tlačítkem ESC může být menu
opět opuštěno.
Jakmile jsou stanoveny systémové parametry, mohou být prostřednictvím menu
Positionierung (nastavení polohy) vydány příkazy polohy na řídící kartě krokového
motoru.
Jsou vám k dispozici následující programové funkce:
Reference:
Vybraný motor provádí pomalý pohyb v negativním směru.
Po dosažení referenčního spínače se koná obrácení smyslu otáčení a motor otáčí
počet předem stanovených polovičních cyklů (viz. referenční vzdálenost X, Y, Z)
v opačném směru. Tento proces se opakuje pro všechny tři osy, pokud byla Z-osa
definována jako výstup motoru. Je-li Z-osa definována jako magnetický výstup, může
být stanoveno, zda má být výstup s referenční jízdou pod proudem nebo ne.
S pomocí referenční jízdy může být systém uveden do nulové polohy, stanovené
prostřednictvím polohy referenčního spínače.
Referenční jízda může být přerušena tlačítkem
Manuálně:
Nastavení polohy s klávesnicí, přičemž je zohledněna hodnota (manuální rychlost) ze
systémových parametrů.
se rozumí relativní zrychlení motoru. Čím je tato hodnota vyšší, tím se
1 (LPT1)
2 (LPT2)
.
ESC
10
Page 11

Obsazení klávesnice: kurzor vlevo/vpravo: X-motor – nastavení polohy
Kurzor nahoře/dole: Y-motor – nastavení polohy
Obraz nahoře/dole: Z-motor – nastavení polohy
popř. relé zapnuto/vypnuto
Tento bod menu může být opuštěn tlačítkem ESC.
Výstup souboru:
S tímto můžete provádět výstup vektorových souborů přímo na řídící kartu krokového
motoru. Tato vektorové soubory musí být nejdříve vytvořeny pod bodem menu Datei
(soubor). Podle volby vektorového souboru budou definované vektory přímo
předávány na řízení, přičemž je zohledněna definice v systémových parametrech.
Výstup souboru může být tlačítkem ESC přerušen.
Pro stanovení průběhů pohybu pro řídící kartu krokového motoru slouží bodu menu
(soubor).
Datei
Zde mohou být prostřednictvím editoru definovány a uloženy vektory pro každou osu
(X,Y,Z), tzn. poloviční cykly motoru.
Bod menu Datei (soubor) se člení do funkcí
● Nový: zhotovení nového vektorového souboru
●
Otevřít:
● Ukončit: ukončit program SMC800
Po volbě funkce Nový nebo Otevřít se dospěje do zpracování souborů (zadání
vektorového editoru).
Ve zpracování souborů je nyní k dispozici pro každou osu (X,Y,Z) více vstupních
datových polí, ve kterých musí být zaneseny vektory pro pohyb motorů. Jednotlivá
vstupní datová pole mohou být dosažena prostřednictvím šipkových tlačítek
(vpravo/vlevo/nahoru/dolů) a tlačítek nahoru/dolů (PgUp/PgDn).
Zadání hodnot nastává vždy v polovičních cyklech motoru, tzn. definované hodnoty
mají výstup přímo na řídící kartu krokového motoru, přičemž připojené motory
vykonávají zanesené kroky. Rozsah hodnot vstupních datových polí se rozprostírá od
–32768 do +32767. Negativní hodnoty způsobují pohyb v negativním počítacím
směru, positivní hodnoty v positivním počítacím směru. Hodnota 0 (nula) neznamená
žádný pohyb příslušné osy.
Nyní můžete řádek po řádce pro každou osu definovat příslušné poloviční cykly pro
pohyb motorů. Při zadání je tak stanoveno, kolik os se má současně pohybovat
(lineární interpolace), jelikož jsou vektory předávány na řízení vždy po řádcích.
editace již existujícího vektorového souboru
11
Page 12

Příklad by to měl objasnit. Následující záznamy jsou dány:
Řádka 1 1000 0 0
Řádka 2 200 200 0
Řádka 3 0 0 500
Řádka 4 -300 0 -300
Řádka 5 0 -1000 0
Řádka 6 400 400 200
Bude-li nyní výstup souboru dat spuštěn tlačítkem F2, bude prováděn výstup
zadaných hodnot po řádcích na řídící kartu krokového motoru. Výstup nastane nyní
následujícím způsobem: nejdříve je zpracována řádka 1, tzn. motor na X-ose je
zařízen tak, aby 1000 polovičních cyklů motoru bylo prováděno v positivním
počítacím směru. Motory na ose Y a Z nevykonávají žádný pohyb. Potom se provede
zpracování řádky 2, přičemž se osy X a Y současně pohybují a provádějí 200
polovičních cyklů motoru v pozitivním počítacím směru. Z-osa se nepohybuje. Potom
je na řadě řádek 3. Zde nevykonávají osy X a Y žádný pohyb, Z-osa se pohybuje v
500 polovičních cyklech motoru v pozitivním počítacím směru. V řádku 4 jsou
definovány negativní hodnoty, tzn. příslušné osy se pohybují v negativním počítacím
směru. Osy X a Z se pohybují 300 polovičními cykly motoru v negativním počítacím
směru, osa-Y nevykonává žádný pohyb.
Následně se osa-Y pohybuje 1000 polovičními cykly motoru v negativním počítacím
směru, osy X a Y nevykonávají žádný pohyb. Nakonec budou pohybovány osy X, Y a
Z v řádce 6, přičemž osa X a Y – provádějí 100 polovičních cyklů motoru a Z-osa 200
polovičních cyklů motoru v positivním počítacím směru.
Tento příklad ukazuje, že prostřednictvím editoru mohou být definovány komplexní
pohybové průběhy a vydávány přes řídící kartu krokového motoru. K tomu mohou být
osy pohybovány jednotlivě nebo společně (lineární interpolace).
Při výstupu datových hodnot jsou zohledněny systémové parametry. Tak je
dimenzován výše uvedený příklad pro tříosý provoz, tzn. v systémových parametrech
je pod Z-osou zanesena hodnota mezi –31999 a +31999, takže je na všech tří osách
připojen motor.
Nyní může být Z-osa provozována přirozeně také v provozu kreslícího zařízení,
potom je do systémových parametrů pod Z-osu zanesena hodnota –32000 nebo
32000. Zde může být např. zdvihový magnet připojen na Z-osu, čímž pro zpracování
dat vyplyne jiná definice polovičních cyklů motoru pro Z-osu. Zde budou definovány
jen negativní a positivní hodnoty, velikost datové hodnoty přitom nehraje žádnou roli.
Jestli bude nyní definováno 1 nebo 1000 nebo 10000 pro positivní směr popř. –1
nebo –1000 nebo –10000 pro negativní směr, nemám žádný význam. Pouze je
bráno znaménko (positivní/negativní hodnota) na zřetel.
X-osa Y-osa Z-osa
12
Page 13

Následující příklad ukazuje nastavení v provozu kreslícího zařízení:
Řádka 1000 1000 0
Řádka 0 0 10
Řádka 400 0 0
Řádka 0 0 -1000
Pokud bude nyní výstup souboru spuštěn tlačítkem F2, vyplyne následující pohybový
průběh: v řádce 1 nastane výstup 1000 polovičních cyklů motoru na osu X a Y, osa
Z se nepohybuje. V řádce 2 je nastavena Z-osa. Nebude zde proveden výstup
definovaného počtu (10) polovičních cyklů motoru, nýbrž jen Z-výstup opatřen
proudem na svorce 1-2. V řádce 3 bude opět proveden výstup 400 polovičních cyklů
motoru na X-osu. Osy Y a Z se nepohybují. V řádce 4 bude zapojen výstup Z bez
napětí. Přitom počet kroků (-1000) opět nehraje žádnou roli, význam má jen negativní
znaménko.
Definované vektory (poloviční cykly motoru) osy X/Y/Z mohou být přirozeně také
uloženy v paměti. S tlačítkem F9 bude spuštěn proces ukládání do paměti. Nejdříve
musí být zadán název souboru, bez koncovky souboru (přípona). Tato přípona bude
zadána programem ( .SMC ). Uložená data mohou být potom vždy vyvolána
s pomocí výstupu souboru na řídící kartu krokového motoru.
Tlačítkem F10 bude opuštěn bod menu zpracování souborů.
X-osa Y-osa Z-osa
13
3.1.2 SMC_DRV2:
Řídící program (ovladač) pro kartu SMC800 a SMC1500 (bez doplňkové desky
SMC1500Z). Nastavení karty se zde provádí nezávisle na rychlosti počítače
v jednotce kroky za sekundu.
K přímému nastavení řídící karty krokového motoru SMC800 popř. SMC1500 je také
u tohoto ovladače přiložen program SMC800. Popis funkce se podobá programu,
popsanému pod SMC_DRV1, a proto zde nebude dál pojednáván.
Jelikož výstupní rychlost impulsů je zde definována v jednotce kroky za sekundu,
vyplývají zde v systémových parametrech nová výstupní datová pole, která jsou
popsány následovně:
Startovací frekvence:
Hodnota
v jednotce kroky/sekundu. Může být definována hodnota mezi 1 a 5000.
Pracovní frekvence:
Hodnota
kroky /sekundu. Toto může být hodnota mezi 1 a 5000.
startovací frekvence
pracovní frekvence
určuje náběhovou frekvenci krokového motoru
určuje pracovní frekvenci krokového motoru v jednotce
Page 14

Zrychlení:
Hodnota
nejdříve nastaven se startovací frekvencí a zrychlen s ohledem na zrychlovací
frekvenci až do pracovní frekvence. Startovní frekvence by měly být vždy nižší než
pracovní frekvence. Může být definována hodnota mezi 1 a 5000.
Brzdění:
Hodnota
bude dosaženou pracovní frekvencí zabržděn na nulu, s ohledem na frekvenci
brzdění. Platné hodnoty se pohybují v oblasti 1 až 5000.
Referenční frekvence:
Hodnota
v jednotce kroky/sekundu. Referenční jízda bude provedena bez zrychlení a bez
brzdného zpomalení. Mohou být definovány hodnoty mezi 1 a 5000.
zrychlení
brzdění
referenční frekvence
definuje rampu zrychlení v krocích za sekundu. Krokový motor je
definuje brzdovou rampu v krocích za sekundu. Krokový motor
určuje pracovní frekvenci pro referenční jízdu
14
3.1.3 SMC_DV2A:
Řídící program (ovladač) jen pro SMC1500-kartu s doplňkovou deskou SMC1500Z.
Nastavení karty se zde provádí nezávisle na rychlosti počítače v jednotce kroky za
sekundu.
K přímému nastavení řídící karty krokového motoru SMC1500 je k tomuto ovladači
přiložen program SMC1500A.EXE. Popis funkce se podobá programu, popsanému
pod SMC_DRV2, a proto zde nebude dál pojednávána.
Tento ovladač dodává v protikladu k výše popsaným ovladačům na paralelním
interface synchronizační impuls a směrový signál, které mohou být zpracovány jen
doplňkovou deskou SMC1500Z.
3.2 Řídící software (ovladač) pro vyšší programovací jazyk
Pro mnoho aplikací existuje potřeba, spojit nastavení řídící karty krokového motoru
přímo do aplikačně orientovaných programových části. Signály, vytvořené ovladačem
motoru, provozují řídící kartu krokového motoru v provozu polovičních cyklů. Při
předávání vektorů z hlavního programu na řídící program motoru je třeba dbát na to,
že se u těchto hodnot jedná o poloviční cykly.
V rozsahu dodávky jsou obsaženy řídící programy motoru pro vyšší programovací
jazyk C a Turbo Pascal:
SMCMOT.C (řídící program motoru v C)
SMCMOT.PAS (řídící program motoru v Turbo Pascal)
Page 15

Pro oba vyšší programovací jazyky existuje příkladný program (SMCMAIN.C,
SMCMAIN.PAS) pro demonstraci napojení příslušného ovladače motoru. Tento
software může se vzhledem k Z-ose rozeznávat mezi kreslícím a 3-osým provozem.
Kreslící provoz:
Polohování osy X a Y se provádí prostřednictvím předání vektorů na modul ovladače
motoru SMCMOT, přičemž se musí hodnoty vektorů pohybovat v rámci od –31999 a
31999.
Fáze 1-2 osy Z je zapojena s vektorovou hodnotou 32000 a vypnuta s –32000. Tímto
může být např. ovládáno relé nebo zdvihový magnet vektorů. Tento vektor je
společně s vektorem X a Y předáván na modul ovladače motoru.
3-osý provoz:
Výstup prostorového vektoru X,Y,Z. Nastavení polohy se provádí opět
prostřednictvím předání vektorů na modul ovladače motoru SMCMOT. Vektorové
hodnoty tří os se musí pohybovat v oblasti od –31999 a 31999.
Při napojení je třeba dbát následujících bodů:
a) Celkový popis
SMC_DRV1
Proměnné
MPTRX unsignet char byte 0
MPTRY unsignet char byte 0
MPTRZ unsignet char byte 0
RampGen unsignet char boolean false
_LPT unsignet int word 378 h = LPT1
278 h = LPT2
Bude-li použit počítač s MDA-kartou, vyjdou následující adresy paralelních rozhraní:
3BCh = LPT1
378h = LPT2
Je třeba dbát na to, že musí být proměnné MPTRX, MPTRY, MPTRZ a RampGen na
začátku programu inicializovány hodnotou 0.
Pro výstup řídících povelů na kartu musí být adresa paralelního portu tiskárny
proměnné _LPT přidělena na začátku programu. Pro většinu počítačů musí být pro to
použity adresy pro LPT1 a LPT2 ve výše uvedené tabulce. Pro jistotu by se měl
uživatel ujistit v manuálu použitého počítače.
:
Typ dat v C Typ dat v TP Iniciační hodnota
15
Page 16

SMC_DRV2 a SMC_DV2A:
Zde musí být jen proměnná LPT obsazena správnou adresou paralelního rozhraní.
Všechny ostatní proměnné již u tohoto ovladače neexistují. Navíc by se měla při
startu programu vyvolat funkce Init_Timer k inicializaci Interrupt-Timeru.
b) Vyvolání funkce referenční jízda
Reference ( xR_Step, yR_Step, zR_Step )
Všechny aktuální parametry typu int nebo integer.
Dostupný software um umožňuje Rozjezd systému na referenční pozici. Vyvolání
funkce referenční jízda obsahuje jako místní parametr pro každou osu přiřazení
počtů kroků (stále pozitivní).
Při vyvolání programu reference provádí řídící jednotka pomalý pohyb v negativním
počítacím směru. Po dosažení referenčního přepínače nastane následný pohyb
v pozitivním směru s počtem předávaných polovičních cyklů. Tím je automaticky
z přepínače nastavena poloha. S předáním aktuálního parametru nula (0) je
potlačena příslušná referenční jízda.
Příklad:
Reference (200, 0, 0) provádí referenční jízdu jen ve směru X, osa Y a Z je
potlačena.
Referenční přepínač
Referenční jízda
Poloha po referenční jízdě
Poloviční cykly
Předávané kroky
16
Page 17

c) Vyvolání funkce klávesnice
Klávesnice (F_MODE)
F_MODE typu unsigned char nebo byte.
Tato funkce umožňuje řízení systému prostřednictvím klávesnice:
X-osa: šipka vlevo/vpravo
Y-osa: šipka nahoru/dolů
Y-osa: obraz nahoru/dolů (PgUp/PgDn)
Ukončit: ESC
F_MODE označuje aktuální parametr řízení prostřednictvím klávesnice:
Kreslící režim:
F_MODE = 1: Obraz nahoře = Z-osa zapnutý proud
Obraz dole = Y-osa vypnutý proud
3-osý režim:
F_MODE = 0: Obraz nahoře = pohyb motoru v pozitivním směru
Obraz dole = pohyb motoru v negativním směru
d) Vyvolání funkce Vecout
Vecout ( xStep, yStep, zStep )
XStep, yStep a zStep typu int nebo integer.
Příkaz funkce k výstupu vektorů X, Y a Z.
Rychlost výstupu vektorů závisí na typu počítače a musí být k každém případě
empiricky (vyzkoušena) zjištěna.
K řízení rychlosti jsou k dispozici v ovladači
(spouštěcí rychlost motorů) a Rampe_Ende (pracovní rychlost motorů), které musí
být v hlavním programu příslušně dosazeny. Jelikož se jedná o prodlení výstupu,
musí být vždy hodnota Rampe_Start vyšší než hodnota Rampe_Ende. Tím je
zajištěn bezpečný rozběh motoru.
Rampa rozběhu motoru může být nastavena hodnotou proměnných
hodnota musí být rovněž zjištěna empiricky.
V ovladačích
proměnné V_Startfreq, V-Arbeitsfreq a zrychlení, jakož i proměnná brzdění pro
průběh brzdění. Obsah proměnné je interpretován v jednotce kroky za sekundu, čímž
SMC_DRV2 a SMC_DV2A
SMC_DRV1
jsou pro nastavení rychlosti k dispozici
proměnné Rampe_Start
strmosti.
17
Tato
Page 18

vyplývá konstantní výstupní frekvence na všech typech počítačů. Proměnná VStartfreq by měla zachovávat stále malou hodnotu, než proměnná V_Arbeitsfreq.
18
3.3 HPGL-převaděč
S pomocí HPGL-převaděče SMCCAD.EXE je uživatel uveden do situace, aby
vydával zobrazovací soubory v HPGL-formátu (HP7475-kreslící zařízení) na řídící
zařízení (kreslící provoz). Tím vzniká možnost prostřednictvím CAD-programů
stanovit a řídit pohybové průběhy.
V praxi nastává následující průběh:
Zhotovení výkresu s CAD-programem
-
Uložení do paměti v HPGL-formátu souborů
-
Spuštění CAD-výstupního programu a výstup souboru na řídící jednotku
-
HPGL-převaděč SMCCAD.EXE není součástí dodávky, avšak je možné jej na
poptávku zakoupit.
Page 19

4. DATOVÉ ROZHRANÍ
4.1 Obsazení datového rozhraní
a) Zdířka centronics
SMC800/SMC1500 SMC1500
bez doplňkové desky s doplňkovou deskou
Č. kontaktu Obsazení Obsazení
1 STROBE STROBE
2 DATA 1 Signálový impuls X-motor
3 DATA 2 Směr otáčení X-motor
4 DATA 3 Signálový impuls Y-motor
5 DATA 4 Směr otáčení Y-motor
6 DATA 5 Signálový impuls Z-motor
7 DATA 6 Směr otáčení Z-motor
8 DATA 7 Neobsazeno
9 DATA 8 Neobsazeno
10 Neobsazeno Neobsazeno
11 Referenční vstup
přepínače
12, 13 Neobsazeno Neobsazeno
14 Neobsazeno Pracovní kontakt Zap/Vyp
15 Neobsazeno Neobsazeno
16 GND GND
17, 18 Neobsazeno Neobsazeno
19-30 GND GND
31, 32 Neobsazeno Neobsazeno
33 GND GND
34, 35 36 Neobsazeno Neobsazeno
b) Svorkovnice (jen pro SMC1500 s doplňkovou deskou)
Č. kontaktu Obsazení
1 Signálový impuls X-motor
2 Směr otáčení X-motor
3 Signálový impuls Y-motor
4 Směr otáčení Y-motor
5 Signálový impuls Z-motor
6 Směr otáčení Z-motor
7 Pracovní kontakt Zap/Vyp
8 Uzemnění signálu
9 Pracovní kontakt připojení 1
10 Pracovní kontakt připojení 2
Referenční vstup přepínače
19
Page 20

4.2 Popis datového rozhraní
a) Centronics (jen pro SMC800 a SMC1500
Označení Funkce
STROBE Převzetí dat (low aktiv)
DATA1/DATA2 Interní zdroj proudu koncového stupně motoru (fáze A)
DATA 1
1
0
1
0
DATA 3
DATA4/DATA5 Interní zdroj proudu koncového stupně motoru (fáze B)
DATA6
DATA7/DATA8 Výběr koncového stupně motoru
DATA 7
Směr fázového proudu (fáze A)
Viz. DATA1/DATA2
Směr fázového proudu (fáze B)
0
1
0
DATA 2
1
1
0
0
DATA 8
0
0
1
bez doplňkové desky)
Žádný proud
Minimální proud
(20% max. proudu)
střední proud
(60% max. proudu)
maximální proud
Koncový stupeň motoru X
Koncový stupeň motoru Y
Koncový stupeň motoru Z
20
Page 21

5. TECHNICKÉ ÚDAJE
Napájecí napětí:
Příkon proudu:
Fázový proud:
Pracovní kontakt:
Referenční přepínač:
Vstupní hladina:
Vstupní frekvence:
SMC800
14 V … 28 V DC
Max. 5 A
mA … 800 mA
Mech. prac. kontakt
(svěrač)
TTL kompatibilní
Max. 5 kHz
21
SMC1500
24 V … 28 V DC
Max. 9,5 A
Max. 9,5 A
24 V/8 A AC
(jen s doplňkovou deskou)
Mech. prac. kontakt
(svěrač)
TTL kompatibilní
(Centronics)
TTL a CMOS
Kompatibilní
(s doplňkovou deskou)
Max. 5 kHz
 Loading...
Loading...